Как найти проекцию вектора на вектор?
Для того, чтобы найти проекцию вектора на вектор ($overline{a}$ на $overline{b}$) нужно разделить скалярное произведение этих векторов на длину последнего вектора $overline{b}$ по формуле: $$text{Пр}_{overline{b}} overline{a} = frac{(overline{a},overline{b})}{|overline{b}|}$$
| Пример 1 |
| Найти проекцию вектора $overline{a} = (1,2)$ на вектор $overline{b} = (-1,2)$ |
| Решение |
|
Вычисляем скалярное произведение векторов. Умножаем соответствующие координаты и складываем $$(overline{a},overline{b}) = 1 cdot (-1) + 2 cdot 2 = -1 + 4 = 3$$ Находим модуль вектора, на который ищем проекцию $$|overline{b}| = sqrt{(-1)^2 + 2^2} = sqrt{5}$$ Подставляя в формулу проекции вектора $overline{a}$ на направляющий вектор $overline{b}$ получаем искомое значение $$text{Пр}_{overline{b}} overline{a} = frac{3}{sqrt{5}}$$ Если не получается решить свою задачу, то присылайте её к нам. Мы предоставим подробное решение онлайн. Вы сможете ознакомиться с ходом вычисления и почерпнуть информацию. Это поможет своевременно получить зачёт у преподавателя! |
| Ответ |
| $$text{Пр}_{overline{b}} overline{a} = frac{3}{sqrt{5}}$$ |
| Пример 2 |
| Вычислить проекцию вектора на вектор, если $overline{a} = (1,2,-3)$ и $overline{b} = (2,1,1)$ |
| Решение |
|
Берем скалярное произведение двух векторов. Перемножаем попарно соответствующие координаты и суммируем полученные значения $$(overline{a},overline{b}) = 1 cdot 2 + 2 cdot 1 + (-3) cdot 1 = 2 + 2 — 3 = 1$$ Так как ищем проекцию на вектор $overline{b}$, то вычисляем его модуль (длину) $$|overline{b}| = sqrt{2^2 + 1^2 + 1^2} = sqrt{6}$$ По главной формуле получаем ответ к задаче $$text{Пр}_{overline{b}} overline{a} = frac{1}{sqrt{6}}$$ |
| Ответ |
| $$text{Пр}_{overline{b}} overline{a} = frac{1}{sqrt{6}}$$ |
ВИДЕО УРОК
Сложение векторов.
ЗАДАЧА:
Пешеходу, стоящему на
перекрёстке двух улиц, надо перейти с угла, обозначенного М1, на угол М2.

Он мог бы направиться
непосредственно к этому углу по прямой М1М2.
Тогда мы сказали бы, что перемещение пешехода равно

Но на улицах с оживлённым
движением такой переход запрещён. Поэтому дисциплинированный пешеход перейдёт
сначала из точки М1 в точку А,
а затем из точки А в точку
М2.
Конечный результат будет таким же, как если бы он прошёл по прямой М1М2.
Перемещение
достигнуто в результате двух
перемещений:

Эти перемещения заменили одно.
Естественно считать, что перемещени

еесть сумма двух перемещений

Приведённый пример показывает, что векторы складываются геометрически.
Чтобы сложить два вектора, нужно их расположить так,
чтобы конец первого вектора примыкал к началу второго.
Вектор, соединяющий начало
первого вектора с концом второго, есть сумма обоих векторов.
Правило параллелограмма.
Если нужно сложить два вектора

их располагают так, чтобы они исходили из одной точки.

Затем, считая, что расположенные таким образом векторы образуют две стороны
параллелограмма, достраивают параллелограмм и проводят диагональ из точки, где
совмещены начала обоих векторов. Эта диагональ и есть сумма векторов или
результирующий вектор.
Другой способ сложения двух векторов состоит в том, что складываемые векторы

располагаются так, чтобы конец одного из них примыкал к началу другого.
Сумма обоих векторов – это вектор, направленный от начала первого вектора к
концу второго.

Этим же способом пользуются, если нужно сложить не два, а больше векторов.
Все складываемые векторы располагаются так, чтобы конец первого вектора
примыкал к началу второго, конец второго – к началу третьего и т. д. Сумма всех
векторов или результирующий вектор – это вектор, направленный от начала первого
вектора к концу последнего.

Чтобы сложить несколько векторов, надо расположить их
так, чтобы конец первого вектора примыкал к началу второго, конец второго – к
началу третьего и т. д.
Результирующим будет вектор, направленный от начала
первого вектора к концу последнего.
По этому же правилу складывают векторы, направленные вдоль одной прямой
(коллинеарные векторы). Сложение коллинеарных векторов, направленных в одну и
ту же сторону и в стороны, противоположные друг другу показано на рисунках:

Из этих рисунков видно, что параллельные (коллинеарные) векторы
складываются, как алгебраические величины, если приписать одному из направлений
знак <<+>> , а противоположному знак <<–>>.
Как найти проекцию вектора, являющегося суммой нескольких векторов ?
На
рисунке

проведены векторы

и показан результирующий вектор

равный сумме этих векторов:

Из этого рисунка видно, что проекции векторов

на ось Х положительны, а
проекция вектора

отрицательна. Видно также, что проекция результирующего вектора

получается, если сложить проекции всех трёх складываемых векторов
алгебраически, т. е. с учётом того, что знак проекции вектора

отрицательный.
Следовательно,
проекция суммы векторов на заданную ось
равна алгебраической сумме проекций слагаемых векторов на ту же ось.
Поэтому, для того чтобы найти проекцию суммы векторов, нет необходимости
находить результирующий вектор и определить его проекцию. Надо просто сложить
проекции всех векторов, учитывая их знаки.
Задачей, обратной сложению вектора, является разложение вектора на
составляющие. Так, в частности, нахождение по данной скорости её составляющих
называется разложением скорости. Данная
скорость

раскладывается на составляющие самым различным образом, так как можно
построить сколько угодно параллелограммов с заданной диагональю, равной вектору


чтобы задача разложения данного вектора

на две составляющие была бы однозначной, нужно дополнительно знать
направления составляющих векторов

или величину и направление одного из них.

Вычитание векторов.
Чтобы найти вектор
равный разности двух векторов
нужно сложить векторы

Вектор

равен по модулю и направлен противоположно вектору

Чтобы найти разность двух векторов, нужно расположить их
так, чтобы они исходили из одной точки, и соединить концы обоих векторов
отрезком, направленным от второго вектора к первому (от вычитаемого к
уменьшаемому). Этот направленный
отрезок и есть вектор-разность.
По такому же правилу производят вычитание коллинеарных векторов

Если нам нужно найти проекцию разности двух векторов
то, так же как в случае сложения векторов, нет необходимости выполнять
геометрические построения. Нетрудно убедиться в том, что
проекция
разности векторов на ось равна алгебраической разности их проекций на эту ось.
Умножение вектора на скаляр.
ЗАДАЧА:
Два автомобиля, выехавшие из
гаража, к исходу дня оказались один в 100
км, а другой в 200
км к северу от места, где расположен
гараж. Что можно сказать о перемещении этих двух автомобилей ? Очевидно, что
одно из них вдвое больше другого. Если обозначить перемещение в 100
км через

то перемещение в 200
км будет равно

т. е. вектору

умноженному на 2. Вектор

имеет то же направление, что и
вектор

но его модуль вдвое больше.
Если бы второй автомобиль
отправился не на север, а на юг, то его перемещение было бы равно

т. е. вектору
умноженному на и –2. Вектор

вдвое больше (по абсолютной
величине) вектора
но направлен в противоположную
сторону.

Вектор

умноженный на скаляр k, представляет собой вектор, модуль которого равен
произведению модуля вектора на модуль скаляра:

Вектор

направлен так же, как вектор

если знак k положительный.
Если же знак k отрицательный, то
вектор

направлен в сторону, противоположную вектору

Проекция вектора

на ось равна умноженной на k проекции вектора

на эту ось:
bx = kax.
Итак, действия над векторами производят по правилам геометрии.
При умножении вектора на скалярную величину k изменяется его
модуль:
увеличивается при k ˃ 1 или уменьшается
при k < 1.
Если величина k положительна, то
направление вектора

совпадает с направлением вектора

Если же величина k отрицательна, то
вектор

направлен противоположно вектору

Действия же над проекциями векторов производят по обычным правилам алгебры.
Если известны проекции ax и ay вектора

на оси координат, то абсолютное значение самого вектора равно

(теорема Пифагора).
ЗАДАЧА:
Камень, который кинули из окна второго
этажа с высоты 4 м, упал на поверхность земли на расстоянии 3
м от стены здания. Найдите модуль перемещения
камня.
РЕШЕНИЕ:
Перемещение камня

Проверим единицы измерения:

Числовое значение:

ОТВЕТ: 5 м
Относительность движения.
Положение тела (точки) в пространстве всегда задаётся относительно какого-то
другого тела, выбранного телом отсчёта. Через какую-нибудь точку тела отсчёта
связана система координат.
Но за тело отсчёта мы можем принять любое тело и с каждым из них связать
свою систему координат. Тогда положение одного и того же тела мы можем
одновременно рассматривать в разных системах координат. Очевидно, что
относительно разных тел отсчёта в разных системах координат положение одного и
того же тела может быть совершенно различным.
ПРИМЕР:
Положение автомобиля на дороге
можно определить, указав, что он находится на расстоянии l1 км к северу от
населённого пункта А.

Пункт А служит в данном случае телом отсчёта, а
прямая, мысленно проведённая от него к северу, – координатной осью, связанной с
телом отсчёта. Но можно выбрать за тело отсчёта и какой-нибудь другой
населённый пункт, например В,
и сказать, что автомобиль расположен в l2 км к востоку от
него.
Это значит, что положение тела относительно:
оно
различно относительно разных тел отсчёта и связанных с ними разных систем
координат.
Но не только положение тела относительно.
Относительно
и его движение.
В чём состоит относительность движения ?
Часто бывает, что движение одного и того же тела приходится рассматривать
относительно разных тел отсчёта, которые сами
движутся друг относительно друга.
ПРИМЕР:
Артиллеристу важно знать, как
движется снаряд не только относительно Земли, на которой его орудие стоит
неподвижно, но и относительно танка, в который он стреляет и который сам
движется относительно Земли.
Пилот интересуется движением
самолёта и относительно Земли, и относительно воздуха, который в бурную погоду
сам движется.
Движение одного и того же тела относительно разных тел отсчёта, движущихся
одно относительно другого, могут сильно различаться. Различными могут быть и
траектории, и скорости движения этого тела.
Рассмотрим движения одного и того же тела относительно двух тел отсчёта,
движущихся друг относительно друга. Предположим, что одно тело отсчёта
неподвижно, а второе движется относительно первого. Примем для простоты, что оно
движется прямолинейно и равномерно. Выясним, как найти перемещение тела
относительно этих двух тел отсчёта (конечно, за одно и то же время).
ПРИМЕР:
Представим себе человека,
плывущего вниз по течению реки с некоторой скоростью, которую он поддерживает постоянной,
работая руками и ногами (если бы он не работал руками и ногами, он бы
просто лежал на воде и относительно воды находился в покое). Примем за неподвижное тело отсчёта берег,
а за подвижное – воду.
Как же движется пловец
относительно берега и относительно воды ? предположим, что за движением пловца
следит два наблюдателя: один – на берегу, а другой – на лодке, которая без
гребца плывёт по течению реки. Относительно воды лодка покоится, а относительно
берега она движется равномерно с такой же скоростью, как и сама вода.
Проведём мысленно через
точку О на берегу, в которой расположился
наблюдатель, оси координат X и Y,
причём ось Х направим вдоль течения реки.

С лодкой (с водой) мы тоже свяжем систему координат X‘O‘Y‘,
оси X‘ и Y‘ которой параллельны осям X и Y.
Лодка и вода движутся поступательно.
Найдём перемещение пловца
относительно этих двух систем координат (систем отсчёта).
Для наглядности посмотрим, как
движение пловца будет представляться наблюдателям в лодке и на берегу. Наблюдатель
в лодке через некоторое время отметит,
что пловец относительно него совершил перемещение

Разделив это перемещение на
время, он получит скорость пловца:


– это скорость пловца относительно
воды (лодки),
т. е. в подвижной системе
координат X‘O‘Y‘.
Наблюдатель на берегу отмети,
что за это же время t перемещение пловца равно

а сама лодка совершила
перемещение

относительно берега. Из рисунка
видно, что перемещение

пловца относительно берега, т.
е. в системе координат, XOY, равно сумме обоих перемещений:

Разделив

на t,
наблюдатель на берегу получит скорость

пловца относительно берега:

Первое слагаемое

– это скорость пловца
относительно подвижной системы координат (воды или лодки). Слагаемое же

– это, очевидно, скорость лодки
(воды) относительно
неподвижной системы координат (берега). Обозначим её через

Значит,

– это скорость подвижной
системы координат относительно покоящейся.
Следовательно

Эта формула называется формулой
сложения скоростей.
Точно такую же формулу сложения скоростей мы получили бы и в том случае,
если бы пловец плыл против течения.

Скорость движения тела относительно неподвижной системы
координат равна геометрической сумме двух скоростей: скорости тела
относительно подвижной системы координат и скорости самой подвижной системы относительно
неподвижной.
Скорости тела относительно различных систем отсчёта, движущихся друг
относительно друга, различны. В этом и проявляется относительность движения.
В рассмотренном примере движущееся тело (пловец) и подвижная система координат
(лодка или вода) движутся вдоль одной прямой – вдоль оси Х.
Поэтому вместо векторов

мы можем воспользоваться их проекциями на ось Х.
Тогда формула сложения скоростей будет иметь вид:
v = v1 + v2.
Величины v, v1 и v2 в этой формуле
могут быть как положительными, так и отрицательными в зависимости от
направлений векторов

по отношению оси Х.
Может случиться и так, что тело, которое движется в одной системе
координат, находится в покое относительно другой. Если бы тот же пловец
перестал работать руками и ногами и просто лежал бы на воде, то относительно
лодки он находился бы в покое, а относительно берега он двигался бы со
скоростью течения. Наоборот, если бы пловец плыл со скоростью течения, но в противоположном
направлении, то в покое он находился ба относительно берега, а относительно
воды он двигался бы со скоростью – v1. Следовательно, относительно не только движение, но и
покой. Если тело относительно какой-то системы координат покоится, то всегда
можно найти такие системы координат, относительно которых оно движется. Это
значит, что абсолютно покоящихся тел не существует. Движение свойственно всем
телам и вообще всему, что существует в природе, т. е. всему материальному миру.
Не всегда скорости движущегося тела и подвижной системы координат
направлены вдоль одной прямой, как в примере с пловцом в предыдущем примере.
ПРИМЕР:
Предположим, что пловцу понадобилось
переплыть реку с одного берега на другой, так что двигаться он должен всё время
перпендикулярно течению, т. е. перпендикулярно оси Х.

По-прежнему будем считать
движение пловца равномерным.
Каким будет это движение для
наблюдателя в лодке (относительно подвижной системы
координат X‘O‘Y‘) и каким оно будет
для наблюдателя на берегу (в
покоящейся системе координат XOY) ?
Наблюдатель в лодке видит, что
пловец всё время удаляется от него, двигаясь вдоль оси Y‘.
Он видит это, находясь и в точке А,
и в точке В,
и в любой другой точке. Через промежуток времени t, когда лодка будет находиться в точке С,
пловец окажется на противоположном берегу в точке C1,
совершив перемещение

Перемещение самого наблюдателя
вдоль оси Х равно

Разделив перемещение

На время t,
наблюдатель в лодке получит скорость

пловца относительно подвижной
системы координат X‘O‘Y‘:

Направлена она вдоль оси Y‘.
Совсем другим будет
представляться движение пловца, переплывающего реку, наблюдателю, находящемуся
на берегу. Для этого наблюдателя перемещаться будет и ось Y‘. B <<его>> системе координат перемещение пловца за то же
время t представится направленным отрезком

Пловца отнесло вниз по течению.
Из рисунка видно, что перемещение
равно геометрической сумме
перемещения

пловца относительно подвижной
системы координат X‘O‘Y‘ и перемещения

cамой системы координат X‘O‘Y‘ относительно неподвижной системы XOY.
Следовательно, и теперь так же, как и в примере, рассмотренном выше,

Скорость пловца

Относительно системы XOY найдём так:

т. е.

Видно, что правило сложения скоростей осталось таким же как и раньше, но
теперь алгебраически скорости складывать нельзя, так как векторы

не параллельны друг другу.
Векторы — основные понятия и формулы
На прошлом занятии мы разобрались с основными определениями кинематики.
И ты наверняка обратил внимание, что некоторые величины имеют только значение (число) – например, путь ((L)).
А некоторые имеют и число, и направление — например, перемещение ((vec{S})).
И сейчас ты узнаешь, почему это настолько важно.
Векторы — коротко о главном
- Существуют скалярные величины: они имеют значение, но не имеют направления;
- Существуют векторные величины. Они имеют как значение, так и направление;
- Значение вектора есть его длина;
- Для большинства операций над векторами необходим пареллельный перенос;
- Вектор можно умножать на скаляр;
- Нулевой вектор – вектор, начало которого совпадает с концом;
- Коллинеарные векторы – векторы, лежащие на одной прямой или на параллельных прямых;
- Коллинеарные векторы, имеющие одинаковую длину и противоположные направления, называются обратными друг другу;
- Векторы можно складывать и вычитать разными методами;
- Правило параллелограмма действует как для сложения, так и для вычитания векторов;
- Векторы можно умножать друг на друга двумя различными способами: скалярным и векторным;
- Проекция вектора на ось — разность между координатами проекций точек конца и начала вектора на ось;
- Если вектор направлен туда же, куда и ось, его проекция положительна. Если вектор направлен в другую сторону, его проекция отрицательна;
- Вектор сам по себе не может быть отрицательным;
- Длина вектора так же не может быть отрицательной;
- Проекция вектора бывает отрицательной;
- Над проекциями тоже можно совершать действия, и это удобнее, чем работать с векторами;
- Проекция суммы векторов равна сумме проекций векторов;
- Проекция разности векторов равна разности проекций векторов;
- С проекцией вектора можно работать как с числом;
Решать задачи с векторами — легко!
Векторы и… Колумб
В 1492 году Колумб приказал кораблям изменить курс на запад-юго-запад, полагая, что он и его команда уже прошли мимо Японии, не заметив ее островов.
Вскоре его экспедиция наткнулась на множество архипелагов, которые ошибочно принимали за земли Восточной Азии. И теперь, спустя века, американцы в октябре отмечают высадку Колумба в Новом Свете.
Кто знает, как повернулась бы история, если бы его корабли не поменяли свое направление?
О направлении
Направление – одна из важнейших характеристик движения.
Подумай, какие из этих величин являются просто числами, а какие тоже являются числами, но имеют еще и направление.
- сила;
- время;
- скорость;
- длина;
- перемещение;
- масса;
- температура;
Наверное, ты без труда заметил, что направление имеют сила, скорость, перемещение, а время, длина, масса и температура – это просто числа.
Так вот, «просто числа» — это скалярные величины (их также называют скалярами).
А «числа с направлением» — это векторные величины (их иногда называют векторы).
В физике существует множество скалярных и векторных величин.
Что такое скалярная величина?
Скалярная величина, в отличие от вектора, не имеет направления и определяется лишь значением (числом)
Это, например, время, длина, масса, температура (продолжи сам!)
Что такое векторная величина?
Векторная величина – это величина, которая определяется и значением, и направлением.
В случае с векторами нам важно, куда мы, например, тянем груз или в какую сторону движемся.
Например, как на этом рисунке изображен вектор силы (нам важно не только с какой силой, но и куда мы тянем груз):
Как обозначаются векторы?
Векторы принято обозначать специальным символом – стрелочкой над названием. Вот, например, вектор перемещения: (vec{S})
Значение вектора – это модуль вектора, то есть его длина.
Обозначить это можно двумя способами: (left| {vec{S}} right|) или (S)
Операции над векторами
Для решения задач необходимо уметь работать с векторами: складывать, вычитать, умножать их.
Давай научимся это делать. Мы пойдем от простого к сложному, но это вовсе не значит, что будет трудно!
Умножение вектора на число
Если вектор умножить на какое-либо число (скаляр), мы просто «растягиваем» вектор, сохраняя его направление. Получившийся вектор сонаправлен начальному, то есть они имеют одинаковое направление.
Это обозначается так: (vec{a}uparrow uparrow vec{b})
(Если направление противоположно, обозначаем так: (vec{a}uparrow downarrow vec{b}))
Рассмотрим на примере, используя клетку для точности построений:
Если вектор умножить на ноль, он станет нулевым.
Обязательно нужно ставить значок вектора над нулем! Нельзя говорить, что векторная величина просто равна скалярной:
(vec{c}=0cdot vec{a}Rightarrow vec{c}=vec{0})
Рассмотрим некоторые свойства нулевого вектора.
Если он нулевой, то его длина равна нулю! Логично, не правда ли?
А это значит, что его начало совпадает с концом, это просто какая-то точка.
Нулевой вектор – вектор, начало которого совпадает с концом.
Нулевой вектор принято считать сонаправленным любому вектору.
Его мы можем получить не только путем умножения вектора на ноль, но и путем сложения противонаправленных векторов:
(vec{a}+(-vec{a})=vec{0})
А если к любому вектору прибавит нулевой, ничего не изменится:
(vec{a}+vec{0}=vec{a})
Если вектор умножают на отрицательное число, он изменит свое направление на противоположное. Такой вектор называется обратным данному.
Но такие векторы должны быть коллинеарны. Звучит как скороговорка, но ничего страшного. Главное – понять суть.
Коллинеарные векторы – векторы, лежащие на одной прямой или на параллельных прямых.
Две прямые параллельны: (qparallel p)
Векторы лежат на одной прямой: они коллинеарны. По направлению видно, что они противонаправлены, это обозначается так:
(vec{a}uparrow downarrow vec{c})
Векторы лежат на параллельных прямых, они коллинеарны. При этом они сонаправлены:
(vec{a}uparrow uparrow vec{b})
Эти двое тоже коллинеарны! Они ведь лежат на параллельных прямых. При этом они противонаправлены:
(vec{b}uparrow downarrow vec{c})
Коллинеарные векторы, имеющие одинаковую длину и противоположные направления, называются обратными друг другу.
Параллельный перенос векторов
Одно из важных свойств вектора, которое очень часто помогает в операциях над ним, – параллельный перенос.
Если передвинуть вектор, не меняя его направления и длины, он будет идентичен начальному. Это свойство – параллельный перенос.
Сложение векторов по правилу треугольника
Сложение векторов – одна из самых легких и приятных вещей. Предположим, у нас есть два вектора:
Наша цель – найти такой вектор, который будет являться суммой двух данных:
(vec{c}=vec{a}+vec{b})
Для начала нужно сделать так, чтобы конец одного вектора был началом другого. Для этого воспользуемся параллельным переносом:
Теперь достроим до треугольника.
Но как узнать направление нужного нам вектора?
Все просто: вектор суммы идет от начала первого слагаемого к концу второго, мы словно «идём» по векторам:
Это называется правилом треугольника.
Больше двух слагаемых векторов. Сложение по правилу многоугольника
Но что делать, нам нужно сложить не два, а три, пять векторов или даже больше?
Мы руководствуемся той же логикой: соединяем векторы и «идём» по ним:
(vec{e}=vec{a}+vec{b}+vec{c}+vec{d})
Это называется правилом многоугольника.
Вычитание векторов через сложение
Вычитание векторов не сложнее. Это даже можно сделать через сумму! Для этого нам понадобится понятие обратного вектора. Запишем разность так:
(vec{c}=vec{a}-vec{b}=vec{a}+(-vec{b}))
Тогда нам лишь остается найти сумму с обратным вектором:
А сделать это очень легко по правилу треугольника:
Всегда помни, что вычитание можно представлять сложением, а деление — умножением на дробь.
Вычитание векторов через треугольник
Вычитать векторы можно через треугольник. Основная задача будет состоять в том, чтобы определить направление вектора разности.
Итак, векторы должны выходить из одной точки. Далее мы достраиваем рисунок до треугольника и определяем положение. Рассмотрим два случая:
(vec{c}=vec{a}-vec{b})
(vec{c}=vec{b}-vec{a})
Направление вектора разности зависит от того, из какого вектора мы вычитаем. У них совпадают концы.
Универсальное правило параллелограмма
Есть еще один способ сложения и вычитания векторов.
Способ параллелограмма наиболее востребован в физике и сейчас ты поймешь, почему. Основа в том, чтобы векторы выходили из одной точки, имели одинаковое начало.
Вот так:
Ничего не напоминает?
Именно! Когда мы делаем чертеж к задачам по физике, все силы, приложенные к телу, мы рисуем из одной точки.
В чем же заключается правило параллелограмма? С помощью параллельного переноса достроим до параллелограмма:
Тогда вектор суммы будет диагональю этой фигуры. Это легко проверяется правилом треугольника. Начало этого вектора совпадает с началом двух слагаемых векторов:
Другая диагональ будет являться разностью этих векторов. Направление определяем так же, как делали раньше.
(vec{c}=vec{a}+vec{b})
(vec{d}=vec{a}-vec{b})
Векторное произведение векторов
Векторное произведение векторов пригодится нам в электродинамике.
Его формула лишь немного отличается от предыдущей:
(vec{a}times vec{b}=left| {vec{a}} right|cdot left| {vec{b}} right|cdot sin varphi )
В отличие от скалярного произведения, результатом его является вектор и его даже можно изобразить!
После параллельного переноса векторов и нахождения угла между ними достроим их до параллелограмма и найдем его площадь. Площадь параллелограмма равна длине вектора произведения:
Этот вектор одновременно перпендикулярен двум другим. Его направление зависит от условного порядка векторов, который либо определен какими-то фактами (когда мы будем изучать силу Лоренца), либо является свободным.
Об этом мы поговорим подробнее, когда будем изучать электродинамику.
Итак, мы разобрали операции с векторами, рассмотрев даже самые сложные из них. Это было не так тяжело, верно? Так происходит не только с векторами, но и со многими другими темами. Идя от легкого к сложному, мы даже не заметили трудностей.
Ведь всегда стоит помнить о том, что даже самое длинное путешествие начинается с первого шага.
Проекции векторов
Что такое проекция вектора и с чем ее едят?
Мы уже выяснили, что над векторами можно проводить множество операций. Здорово, когда можешь начертить векторы, достроить их до треугольника и измерить результат линейкой.
Но зачастую физика не дает нам легких цифр. Наша задача – не отчаиваться и быть умнее, упрощая себе задачи.
Для того, чтобы работать с векторами как с числами и не переживать об их положении и о точности рисунков, были придуманы проекции.
Проекция вектора – словно тень, которую он отбрасывает на ось координат. И эта тень может о многом рассказать.
Ось координат — прямая с указанными на ней направлением, началом отсчёта и выбранной единицей масштаба.
Ось можно выбрать произвольно. В зависимости от ее выбора можно либо значительно упростить решение задачи, либо сделать его очень сложным.
Именно поэтому необходимо научиться работать с проекциями и осями.
Построение проекции. Определение знака
Возьмем вектор и начертим рядом с ним произвольную ось. Назвать ее тоже можно как угодно, но мы назовем ее осью Х.
Теперь опустим из начала и конца вектора перпендикуляры на эту ось. Отметим координаты начала (Х0) и конца (Х). Рассмотрим отрезок, заключенный между этими точками.
Казалось бы, мы нашли проекцию. Однако думать, что проекция является простым отрезком, – большое заблуждение.
Не все так просто: проекция может быть не только положительной. Чтобы найти проекцию, нужно из координаты конца вычесть координату начала:
({{a}_{x}}=x-{{x}_{0}})
Проекция вектора на ось — разность между координатами проекций точек конца и начала вектора на ось.
Проекция обозначается так:
({{a}_{x}}), где a – название вектора, х – название оси, на которую проецируется вектор.
В случае выше определить знак довольно легко. Сразу видим, что координата конца численно больше координаты начала и делаем вывод о том, что проекция положительна:
(x>{{x}_{0}}Rightarrow {{a}_{x}}>0)
Порой работать с буквами трудно. Поэтому предлагаю взять конкретный пример:
Рассмотрим другой случай. В этот раз координата начала больше координаты конца, следовательно, проекция отрицательна:
(x<{{x}_{0}}Rightarrow {{b}_{x}}<0)
Пример на конкретных числах:
Рассмотрим еще один интересный случай.
Давай разместим ось так, чтобы вектор был ей перпендикулярен. Проекции точек начала и конца совпадут и проекция вектора будет равна нулю!
(x={{x}_{0}}Rightarrow {{c}_{x}}=0)
Анализ углов
Рассматривая эти ситуации, можно заметить, что знак, который принимает проекция вектора напрямую зависит от угла между вектором и осью, то есть от его направления!
Из начала вектора проведем луч, параллельный оси и направленный в ту же сторону, что и ось. Получим угол между вектором и осью.
Если угол острый, проекция положительна:
(alpha <{{90}^{o}}Rightarrow {{a}_{x}}>0)
Если угол тупой, проекция отрицательна:
(beta >{{90}^{o}}Rightarrow {{b}_{x}}<0)
Если угол прямой, она равна нулю:
(gamma ={{90}^{o}}Rightarrow {{c}_{x}}>0)
Обрати особое внимание на то, какой именно угол является углом между вектором и осью!
Частные случаи проекции
Настоящий подарок судьбы – тот момент, когда вектор параллелен оси. Это сохраняет драгоценное время при решении множества задач. Рассмотрим эти случаи.
Если вектор параллелен оси, угол между ними либо равен нулю, либо является развернутым (180О). Это зависит от направления.
При этом длина проекции совпадает с длиной вектора! Смотри!
Как и прежде, если вектор направлен туда же, куда и ось, проекция положительна:
(alpha ={{0}^{o}}Rightarrow {{a}_{x}}=a)
Если вектор направлен в другую сторону, проекция отрицательна:
(alpha ={{180}^{o}}Rightarrow {{a}_{x}}=-a)
Если вектор направлен туда же, куда и ось, его проекция положительна. Если вектор направлен в другую сторону, его проекция отрицательна.
Эти утверждения применимы не только к векторам, которые параллельны оси. Это особенно удобно использовать в тех случаях, когда ось направлена под углом.
Что? Почему раньше не сказал? А… Ну…
Хватит вопросов! Вот тебе пример:
(vec{a}) направлен в ту же сторону, что и ось. Его проекция положительна.
(vec{b}) направлен противоположно оси. Его проекция отрицательна.
Еще один частный случай – работа с обратными векторами.
Давай выясним, как связаны проекции данного вектора и вектора, который является ему обратным. Начертим их и обозначим координаты начал и концов:
Проведем дополнительные линии и рассмотрим два получившихся треугольника. Они прямоугольны, так как проекция строится с помощью перпендикуляра к оси.
Наши векторы отличаются лишь направлением. При этом, если мы просто посмотрим на них как на прямые, мы можем сказать, что они параллельны. Их длины тоже одинаковы.
Прямоугольные треугольники равны по углу и гипотенузе. Это значит, что численно равны и их катеты, в том числе те, которые равны проекциям:
(vec{a}’=-vec{a}) — векторы обратны друг другу;
(left| {vec{a}} right|=left| vec{a}’ right|) — равенство длин векторов;
Мы помним, что обратные векторы всегда коллинеарны. Это значит, что прямые, на которых они расположены, находятся под одним углом к оси:
(alpha =alpha ‘)
Остается лишь определиться со знаками. Данный вектор направлен по оси Х, а обратный ему – против. Значит, первый положителен, а второй отрицателен. Но модули их равны, так как равны их длины.
({{a}_{x}}=-a_{x}^{‘})
Проекции обратных векторов равны по модулю и противоположны по знаку.
Давайте еще раз уточним.
Вектор сам по себе не может быть отрицательным (обратный вектор есть вектор, умноженный на минус единицу).
Длина вектора так же не может быть отрицательной. Длина есть модуль вектора, а модуль всегда положителен.
Проекция вектора бывает отрицательной. Это зависит от направления вектора.
Способы нахождения проекций и векторов с помощью тригонометрии
Зная угол между вектором и осью, можно не прибегать к координатам. Углы, прямоугольные треугольники… Всегда стоит помнить, что, если ты видишь прямоугольный трегольник, тригонометрия протянет тебе руку помощи.
Именно тригонометрия чаще всего применяется в задачах, где требуется работать с проекциями. Особенно она помогает в задачах на второй закон Ньютона.
Рассмотрим вектор и его проекции на оси:
Можем заметить, что проекции вектора соответствуют катетам прямоугольного треугольника, который легко можно достроить:
Тогда обозначим прямой угол и угол между вектором и осью:
Зная, что проекции соответствуют катетам, мы можем записать, чему равны синус и косинус угла. Они равны отношению проекций к гипотенузе. За гипотенузу считаем длину данного вектора.
Из этих уравнений легко выражаются проекции.
(sin alpha =frac{{{a}_{y}}}{a})
(cos alpha =frac{{{a}_{x}}}{a})
А еще следует помнить, что из проекций мы можем найти длину данного вектора с помощью теоремы Пифагора:
({{a}^{2}}=a_{x}^{2}+a_{y}^{2})
Зная, как работать с проекциями векторов и часто практикуясь, можно довести свои навыки решения большинства задач механики до совершенства.
Действия над проекциями векторов. Решение задач
Умение применять свои знания на практике невероятно важны. Это касается не только физики.
Мы знаем, что проекции были придуманы для того, чтобы работать не с векторами, а с числами.
Давай попробуем.
Сложение проекций. Доказательство главного свойства
Предположим, у нас есть два вектора и нам нужно найти их сумму. Посчитать по клеткам нам вряд ли удастся:
Спроецируем оба вектора на ось Х. Заметим, что конец одного вектора есть начало второго, то есть их координаты совпадают:
Давай посчитаем проекции векторов и проекцию вектора их суммы:
Мы можем заметить, что сумма проекций двух данных векторов оказалась равна проекции вектора их суммы!
Намного важнее уметь доказывать гипотезы в общем виде.
Тогда никто не сможет упрекнуть тебя в том, что твои утверждения – просто результат совпадения!
Согласно определению проекции, запишем уравнения проекций для двух данных векторов и вектора их суммы:
Заметим, что некоторые точки совпадают. Начало (vec{a}) совпадает с началом (vec{c}). Как мы заметили ранее, конец (vec{a}) совпадает с началом (vec{b}). А конец (vec{b}) совпадает с концом (vec{c}).
Затем запишем, чему равна сумма этих векторов.
Видим, что конец (vec{a}) и начало (vec{b}) одинаковы. Поэтому избавимся от повторов:
У нас остались лишь начало (vec{a}) и конец (vec{b}). А это в свою очередь начало и конец (vec{c})!
Мы доказали нашу гипотезу.
Но что насчет разности?
Все очень просто! Помнишь, как мы считали разность через сумму? Здесь это делается аналогично!
Таким образом,
Проекция суммы векторов равна сумме проекций векторов.
Проекция разности векторов равна разности проекций векторов.
Или можно записать так:
(vec{c}=vec{a}pm vec{b}Rightarrow {{c}_{x}}={{a}_{x}}pm {{b}_{x}})
Простейшие задачи на нахождение проекций
Простейшие задачи на нахождение проекций чаще представлены в виде различных графиков или рисунков.
Давай научимся с ними работать.
Нам даны оси и векторы. Задача: найти проекции каждого из них на обе оси.
Будем делать все по порядку. Для каждого вектора предлагаю сначала определить знак проекций, а затем посчитать их.
В первом случае вектор направлен против оси Х.
Значит, его проекция на эту ось будет отрицательна. Мы убедимся в этом с помощью вычислений.
Сразу бросается в глаза то, что вектор расположен перпендикулярно оси Y. Его проекция на эту ось будет равна нулю, ведь расстояние между проекциями точек начала и конца равно нулю!
Рассмотрим второй вектор.
Он «сонаправлен» оси Y и «противонаправлен» оси Х. Значит, проекция на ось будет положительна, а на ось Х – отрицательна.
Убедимся в этом.
На осях для удобства отметим проекции точек начала и конца вектора, проведя перпендикуляры. Затем проведем вычисления:
Рассмотрим (vec{c}). Заметим, что он является обратным для (vec{b}): их длины равны, а направления противоположны.
Мы помним, что в таком случае их проекции отличаются лишь знаками. И это действительно так:
Поступаем с (vec{d}) так же, как поступали с первым вектором.
Он перпендикулярен оси Х, а значит его проекция (что есть разность между проекциями точки конца и начала!) на эту ось равна нулю.
Проведя перпендикуляры, считаем проекцию на ось Y:
С (vec{e}) работать приятно: он расположен по направлению обеих осей. Обе его проекции будут положительны, остается лишь посчитать их:
Задачи на нахождение вектора и его угла с осью
С помощью проекций можно найти длину вектора и его направление, а также угол, под которым он находится относительно оси.
Давай попробуем это сделать.
Даны проекции вектора на две оси. Для начала нарисуем оси:
Расположить вектор можно как угодно, поэтому произвольно отметим на осях его проекции. Мы помним, что проекции и вектор образуют прямоугольный треугольник. Давай попробуем его составить.
С проекцией на ось Х все понятно, просто поднимаем ее. Но куда поставить проекцию оси Y?
Для этого нам нужно определить направление вектора. Проекция на ось Х отрицательна, значит вектор направлен в другую сторону от оси.
Проекция на ось Y положительна. Вектор смотрит в ту же сторону, что и ось.
Исходя из этого, мы можем нарисовать вектор и получить прямоугольный треугольник:
Теперь нужно найти длину этого вектора. Используем старую добрую теорему Пифагора:
Обозначим угол (alpha ), который необходимо найти, мы учились это делать в начале изучения проекций. Он расположен вне треугольника. Мы ведь не ищем легких путей, верно?
Рассмотрим смежный ему угол (beta ). Его найти гораздо проще, а в сумме они дадут 180 градусов.
Чтобы сделать это, абстрагируемся от векторов, проекций и просто поработаем с треугольником, стороны которого равны 3, 4 и 5. Найдем синус угла (beta ) и по таблице Брадиса (либо с помощью инженерного калькулятора) определим его значение.
Вычитанием угла (beta ) из 180 градусов найдем угол (alpha ):
Главный метод работы с осями и проекциями в решении физических задач
В большинстве задач по физике, когда в условиях нам дают значения векторных величин, например, скорости, нам дают длину вектора.
Поэтому важно научиться искать проекции вектора и связывать их с ней.
Рассмотрим следующий рисунок (вектор F2 перпендикулярен вектору F3):
Чаще всего с подобным расположением векторов мы встречаемся в задачах, где необходимо обозначить все силы, действующие на тело.
Одним из важных этапов решение «векторной части» этих задач является правильный выбор расположения осей. Он заключается в том, чтобы расположить оси так, чтобы как можно большее число векторов оказались им параллельны.
Как правило, оси располагаются под прямым углом друг к другу, чтобы не получить лишней работы с углами.
Сделаем это для данного рисунка:
Мы видим, что остальные векторы расположены к осям под каким-то углом.
Пунктиром проведем горизонтальную линию и отметим этот угол, а затем отметим другие равные ему углы:
Пришло время искать проекции. У нас две оси, поэтому сделаем для удобства табличку:
Мы располагали оси так, чтобы некоторые векторы были расположены параллельно осям, значит их проекции будут равняться их длинам.
Оси перпендикулярны друг другу, поэтому некоторые проекции будут равняться нулю. Запишем это:
Переходим к векторам, которые расположены под углом.
Выглядит страшно, но это не так!
Дальше идет чистая геометрия. Чтобы не запутаться, рассмотрим лишь часть рисунка. А лучше и вовсе перерисовать его часть, могут открыться много новых вещей.
Из конца вектора F1 проведем перпендикуляр к оси Y. Мы получим прямоугольный треугольник, где нам известен угол (альфа) и гипотенуза (вектор).
Обозначим, что является проекцией. Это катет:
Здесь на помощь придет тригонометрия. Этот катет прилежащий к известному углу. Синус угла есть проекция катета, деленная на гипотенузу. Отсюда можно выразить катет (проекцию) и записать ее в таблицу.
Вспомни, когда мы первый раз встретились с тригонометрией, изучая векторы. Мы тоже рассматривали прямоугольный треугольник.
Найдем проекцию на ось Х. Это, кажется, сложнее, ведь мы не знаем угол…
Знаем! Ведь проекция вектора на ось Х – то же самое, что противолежащий катет уже рассмотренного треугольника, смотри:
Значит, проекцию на ось Х можно найти через косинус.
Не забываем смотреть на направления векторов!
Попробуй найти проекции четвертого вектора самостоятельно и сверься с таблицей.
Значит, проекцию на ось Х можно найти через косинус.
Не забываем смотреть на направления векторов!
Попробуй найти проекции четвертого вектора самостоятельно и сверься с таблицей.
Подготовка к ЕГЭ на 90+ в мини-группах
![]()
Алексей Шевчук — ведущий мини-групп
математика, информатика, физика
+7 (905) 541-39-06 — WhatsApp/Телеграм для записи
alexei.shevchuk@youclever.org — email для записи
- тысячи учеников, поступивших в лучшие ВУЗы страны
- автор понятного всем учебника по математике ЮКлэва (с сотнями благодарных отзывов);
- закончил МФТИ, преподавал на малом физтехе;
- репетиторский стаж — c 2003 года;
- в 2021 году сдал ЕГЭ (математика 100 баллов, физика 100 баллов, информатика 98 баллов — как обычно дурацкая ошибка:);
- отзыв на Профи.ру: «Рейтинг: 4,87 из 5. Очень хвалят. Такую отметку получают опытные специалисты с лучшими отзывами».
Вектор – это направленный прямолинейный отрезок, то есть отрезок, имеющий
определенную длину и определенное направление. Пусть точка А – начало вектора, а точка B – его конец, тогда вектор обозначается символом  или
или  . Вектор
. Вектор  называется противоположным
называется противоположным
вектору и может быть
обозначен  .
.
Сформулируем ряд базовых определений.
Длиной
или модулем
вектора называется
длина отрезка и обозначается  . Вектор нулевой длины (его суть — точка) называется нулевым
. Вектор нулевой длины (его суть — точка) называется нулевым  и направления
и направления
не имеет. Вектор  единичной длины, называется единичным. Единичный вектор,
единичной длины, называется единичным. Единичный вектор,
направление которого совпадает с направлением вектора , называется ортом вектора .
Векторы
называются коллинеарными, если они лежат на одной прямой или на
параллельных прямых, записывают . Коллинеарные векторы могут иметь совпадающие или
. Коллинеарные векторы могут иметь совпадающие или
противоположные направления. Нулевой вектор считают коллинеарным любому
вектору.
Векторы
называются равными  , если они коллинеарны, одинаково направлены и имеют
, если они коллинеарны, одинаково направлены и имеют
одинаковые длины.
Три вектора в пространстве называются компланарными,
если они лежат в одной плоскости или на параллельных плоскостях. Если среди
трех векторов хотя бы один нулевой или два любые коллинеарны, то такие векторы
компланарны.
Рассмотрим в
пространстве прямоугольную систему координат 0xyz. Выделим на осях координат 0x, 0y, 0z единичные векторы (орты) и
обозначим их через  соответственно.
соответственно.
Выберем произвольный вектор
пространства и совместим его начало с началом
координат. Спроектируем вектор
на координатные
оси и обозначим проекции через ax, ay, az
соответственно. Тогда нетрудно показать, что
 . (2.25)
. (2.25)
Эта
формула является основной в векторном исчислении и называется разложением
вектора по ортам координатных осей. Числа ax, ay, az называются координатами вектора . Таким образом, координаты вектора являются его
проекциями на оси координат. Векторное равенство (2.25) часто записывают в
виде
 . Мы будем использовать обозначение вектора в фигурных
. Мы будем использовать обозначение вектора в фигурных
скобках, чтобы визуально легче различать координаты вектора и координаты точки.
С использованием формулы длины отрезка, известной из школьной геометрии, можно
найти выражение для вычисления модуля вектора
:
 , (2.26)
, (2.26)
то
есть модуль вектора равен корню квадратному из суммы квадратов его координат.
Обозначим углы между вектором
и осями
координат через α, β, γ соответственно. Косинусы этих углов называются
для вектора направляющими, и для них выполняется соотношение: Верность данного равенства можно показать с помощью
Верность данного равенства можно показать с помощью
свойства проекции вектора на ось, которое будет рассмотрено в нижеследующем
пункте 4.
Пусть в трехмерном пространстве заданы векторы  своими
своими
координатами. Имеют место следующие
операции над ними: линейные (сложение, вычитание, умножение на число и
проектирование вектора на ось или другой вектор); не линейные – различные
произведения векторов (скалярное, векторное, смешанное).
1. Сложение двух векторов производится покоординатно, то
есть если
 .
.
Данная
формула имеет место для произвольного конечного числа слагаемых.
Геометрически
два вектора складываются по двум правилам:
а) правило треугольника –
результирующий вектор суммы двух векторов соединяет начало первого из них с
концом второго при условии, что начало второго совпадает с концом первого
вектора; для суммы векторов –
результирующий вектор суммы соединяет начало первого из них с концом последнего
вектора-слагаемого при условии, что начало последующего слагаемого совпадает с
концом предыдущего;
б)
правило
параллелограмма (для двух
векторов) – параллелограмм строится на векторах-слагаемых как на сторонах,
приведенных к одному началу; диагональ параллелограмма исходящая из их общего начала, является суммой
векторов.
2. Вычитание двух векторов производится
покоординатно, аналогично сложению, то есть если  , то
, то
 .
.
Геометрически два
вектора складываются по уже упомянутому правилу параллелограмма с учетом того, что разностью векторов
является диагональ, соединяющая концы векторов, причем результирующий вектор
направлен из конца вычитаемого в конец уменьшаемого вектора.
Важным следствием
вычитания векторов является тот факт, что если известны координаты начала и
конца вектора, то для вычисления координат вектора необходимо из координат его конца
вычесть координаты его начала. Действительно, любой вектор пространства может быть
представлен в виде разности двух векторов, исходящих из начала координат:  . Координаты векторов
. Координаты векторов и
и совпадают с
совпадают с
координатами точек А и В, так как начало координат О(0;0;0). Таким образом, по правилу
вычитания векторов следует произвести вычитание координат точки А из координат точки В.
3. Умножение вектора на число λ покоординатно: .
.
При λ>0
– вектор сонаправлен ; λ<0 – вектор противоположно направлен ; |λ|>1 – длина вектора увеличивается в λ раз; |λ|<1 – длина вектора уменьшается в λ раз.
сонаправлен ; λ<0 – вектор противоположно направлен ; |λ|>1 – длина вектора увеличивается в λ раз; |λ|<1 – длина вектора уменьшается в λ раз.
4. Пусть в пространстве задана
направленная прямая (ось l), вектор  задан
задан
координатами конца и начала. Обозначим проекции точек A и B на ось l
соответственно через A’ и B’.
Проекцией  вектора на ось l называется длина вектора
вектора на ось l называется длина вектора  , взятая со
, взятая со
знаком «+», если вектор и ось l сонаправлены, и со
знаком «–», если и l противоположно направлены.
Если
в качестве оси l взять некоторый другой вектор  , то получим проекцию вектора на вектор .
, то получим проекцию вектора на вектор .
Рассмотрим некоторые
основные свойства проекций:
1) проекция вектора на ось l равна произведению модуля
вектора на косинус угла
между вектором и осью, то есть  ;
;
2.) проекция вектора на ось
положительна (отрицательна), если вектор образует с осью острый (тупой) угол, и
равна нулю, если этот угол – прямой;
3) проекция суммы нескольких
векторов на одну и ту же ось равна сумме проекций на эту ось.
Сформулируем определения и
теоремы о произведениях векторов, представляющих нелинейные операции над
векторами.
5. Скалярным произведением  векторов и называется
векторов и называется
число (скаляр), равное произведению длин этих векторов на косинус угла φ между
ними, то есть
 . (2.27)
. (2.27)
Очевидно, что скалярный квадрат любого ненулевого вектора равен квадрату его длины, так как в этом случае угол  , поэтому его косинус (в 2.27) равен 1.
, поэтому его косинус (в 2.27) равен 1.
Теорема 2.2. Необходимым и достаточным условием
перпендикулярности двух векторов является равенство нулю их скалярного
произведения 
Следствие. Попарные скалярные произведения единичных орт равны нулю, то есть 
Теорема 2.3. Скалярное произведение двух векторов  ,
,
заданных своими координатами, равно сумме произведений их одноименных координат, то есть
 (2.28)
(2.28)
С помощью скалярного произведения векторов можно
вычислить угол между ними.
Если заданы два ненулевых вектора
своими координатами , то косинус угла φ между ними:
 (2.29)
(2.29)
Отсюда
следует условие перпендикулярности ненулевых векторов
и :
 (2.30)
(2.30)
Нахождение проекции вектора на направление,
заданное вектором , может осуществляться по формуле
 (2.31)
(2.31)
С помощью скалярного произведения векторов находят
работу постоянной силы  на
на
прямолинейном участке пути.
Предположим, что под действием постоянной силы материальная точка перемещается прямолинейно из
положения А в положение B. Вектор силы образует угол φ с вектором перемещения  (рис. 2.14). Физика утверждает, что работа силы при перемещении
(рис. 2.14). Физика утверждает, что работа силы при перемещении 
равна  .
.

Следовательно, работа постоянной силы
при прямолинейном перемещении точки ее приложения равна скалярному произведению
вектора силы на вектор перемещения.
Пример
2.9. С
помощью скалярного произведения векторов найти угол при вершине A параллелограмма ABCD, построенного на векторах 
Решение. Вычислим модули векторов и их скалярное произведение
по теореме (2.3):

Отсюда согласно формуле (2.29) получим косинус
искомого угла

Пример 2.10. Затраты сырьевых и материальных ресурсов, используемых
на производство одной тонны творога, заданы в таблице 2.2 (руб.).
Какова общая цена этих ресурсов, затрачиваемых на изготовление одной
тонны творога?
Таблица 2.2

Решение. Введем в рассмотрение два вектора: вектор затрат
ресурсов на тонну продукции  и вектор цены единицы
и вектор цены единицы
соответствующего ресурса  .
.
Тогда  . Общая цена
. Общая цена
ресурсов  , что представляет собой скалярное произведение
, что представляет собой скалярное произведение
векторов  . Вычислим его по формуле (2.28) согласно теореме 2.3:
. Вычислим его по формуле (2.28) согласно теореме 2.3:

Таким образом, общая цена затрат на производство одной
тонны творога составляет 279 541,5 рублей
Примечание. Действия с векторами, осуществленные в примере 2.10,
можно выполнить на персональном компьютере. Для нахождения скалярного
произведения векторов в MS Excel используют функцию СУММПРОИЗВ( ), где в качестве
аргументов указываются адреса диапазонов элементов матриц, сумму произведений
которых необходимо найти. В MathCAD
скалярное произведение двух векторов выполняется при помощи соответствующего
оператора панели инструментов Matrix
Пример 2.11. Вычислить работу, произведенную силой  , если точка ее приложения перемещается прямолинейно
, если точка ее приложения перемещается прямолинейно
из положения A(2;4;6) в положение A(4;2;7). Под каким углом к AB направлена сила ?
Решение. Находим вектор перемещения, вычитая из координат его конца координаты
начала
 . По формуле (2.28)
. По формуле (2.28)  (единиц работы).
(единиц работы).
Угол φ между и
находим по
формуле (2.29), то есть

6. Три некомпланарных вектора  , взятые в указанном порядке, образуют правую
, взятые в указанном порядке, образуют правую
тройку, если при наблюдении из конца третьего вектора  кратчайший
кратчайший
поворот от первого вектора ко второму
вектору совершается против часовой стрелки, и левую,
если по часовой стрелке.
Векторным
произведением  вектора на вектор называется
вектора на вектор называется
вектор , удовлетворяющий следующим условиям:
– перпендикулярен векторам и ;
– имеет длину, равную  , где φ – угол, образованный векторами
, где φ – угол, образованный векторами
и ;
– векторы образуют правую
тройку (рис. 2.15).
 Теорема 2.4. Необходимым и достаточным
Теорема 2.4. Необходимым и достаточным
условием коллинеарности двух векторов является равенство нулю их векторного
произведения
Теорема 2.5. Векторное произведение векторов  , заданных своими координатами, равно определителю
, заданных своими координатами, равно определителю
третьего порядка вида
 (2.32)
(2.32)
Примечание. Определитель (2.25)
раскладывается по свойству 7 определителей
Следствие 1. Необходимым и достаточным условием коллинеарности двух
векторов является пропорциональность их соответствующих координат
Следствие 2. Векторные произведения единичных орт равны 
Следствие 3. Векторный квадрат любого вектора равен нулю
Геометрическая
интерпретация векторного произведения состоит в том, что длина результирующего
вектора численно равна площади S
параллелограмма, построенного на векторах–сомножителях как на сторонах,
приведенных к одному началу. Действительно, согласно определению, модуль
векторного произведения векторов равен  . С другой стороны, площадь параллелограмма,
. С другой стороны, площадь параллелограмма,
построенного на векторах и , также равна 
. Следовательно,
 . (2.33)
. (2.33)

Также с помощью векторного произведения можно
определить момент силы относительно точки и линейную скорость вращения.
Пусть в точке A приложена
сила  и пусть O –
и пусть O –
некоторая точка пространства (рис. 2.16). Из курса физики известно, что моментом
силы относительно
точки O называется вектор  , который проходит через точку O и удовлетворяет следующим условиям:
, который проходит через точку O и удовлетворяет следующим условиям:
— перпендикулярен плоскости, проходящей через точки O, A, B;
— его модуль численно равен произведению силы на плечо  .
.
— образует правую тройку с векторами и .
Следовательно,
момент силы относительно
точки O представляет собой векторное произведение
 . (2.34)
. (2.34)

Линейная скорость  точки М твердого тела, вращающегося с
точки М твердого тела, вращающегося с
угловой скоростью  вокруг
вокруг
неподвижной оси, определяется формулой Эйлера  , O – некоторая неподвижная
, O – некоторая неподвижная
точка оси (рис. 2.17).
Пример 2.12. С помощью
векторного произведения найти площадь треугольника ABC, построенного на векторах
 , приведенных к одному началу.
, приведенных к одному началу.
Решение. Найдем векторное произведение заданных векторов по
формуле (2.32).

 . Согласно формуле (2.33) модуль векторного
. Согласно формуле (2.33) модуль векторного
произведения двух неколлинеарных векторов численно равен площади
параллелограмма, построенного на данных векторах как на сторонах, приведенных к
общему началу, то есть  . Тогда площадь треугольника
. Тогда площадь треугольника 
. Следовательно, искомая площадь равна  (единиц
(единиц
площади)
7. Рассмотрим произведение трех векторов , составленное следующим образом:  . Здесь первые два вектора перемножаются векторно, а
. Здесь первые два вектора перемножаются векторно, а
результирующий вектор – скалярно на третий. Такое произведение  называется смешанным
называется смешанным
произведением трех векторов
(векторно–скалярным произведением).
Теорема 2.6. Необходимым и достаточным условием компланарности
трех векторов является равенство нулю их смешанного произведения
Теорема 2.7. Если три вектора  заданы своими координатами, то их смешанное
заданы своими координатами, то их смешанное
произведение представляет собой определитель третьего порядка, составленный из
координат векторов- сомножителей соответственно, то есть
 (2.35)
(2.35)
Нетрудно показать, что объем параллелепипеда,
построенного на векторах как на
сторонах, приведенных к общему началу, численно равен модулю смешенного
произведения этих векторов  .
.
Объем треугольной пирамиды, построенной на этих же
векторах, равен
 (2.36)
(2.36)
Пример 2.13. Вершинами пирамиды служат точки  . Вычислить объем пирамиды.
. Вычислить объем пирамиды.
Решение. Найдем
координаты векторов
 . Вычислим смешанное произведение этих векторов:
. Вычислим смешанное произведение этих векторов: 
По формуле (2.36) объем пирамиды, построенной на
векторах  равен
равен
 (единиц объема)
(единиц объема)
Рассмотрим очень важный вопрос о
разложении вектора по базису. Приведем
следующие определения.
Система векторов  называется
называется
линейно зависимой, если существуют такие числа  , хотя бы одно из которых отлично от нуля, что имеет
, хотя бы одно из которых отлично от нуля, что имеет
место равенство
 (2.37)
(2.37)
Отсюда всегда можно один из линейно
зависимых векторов выразить через линейную комбинацию остальных. Действительно,
допустим для определенности, что  . Тогда на это число разделим равенство (2.37), имеем:
. Тогда на это число разделим равенство (2.37), имеем:

получим выражение вектора  через
через
остальные векторы 
Линейно независимыми называют векторы, если равенство
(2.37) выполняется только тогда, когда
все
 В системе векторов число линейно
В системе векторов число линейно
независимых векторов равняется рангу матрицы, которая составлена из координат
этих векторов (смотри раздел I.5).
Базисом n – мерного
пространства En называют любую совокупность линейно независимых векторов n – мерного пространства.
Произвольный вектор  n
n
– мерного пространства можно представить
в виде линейной комбинации векторов базиса
таким образом:

Числа
 называются координатами
называются координатами
вектора в базисе
векторов .
Линейное пространство называется
конечномерным и имеет размерность n, если в этом
пространстве существует система из n линейно независимых векторов (базис) такая,
что каждое ее расширение приводит к линейной зависимости системы.
Например, в трехмерном пространстве
существует базис единичных орт такой, что любое расширение этой системы
линейно независимых векторов, то есть каждый вектор трехмерного
пространства, приводит к линейной зависимости векторов (является линейной
комбинацией орт ): Коэффициенты {x1, x2, x3} такого разложения вектора
Коэффициенты {x1, x2, x3} такого разложения вектора
по ортам являются координатами вектора в трехмерном
пространстве.
Вопросы для самопроверки
§2. Проекция вектора на заданное направление
1. Проекция вектора на заданное направление.
Пусть заданы два вектора `vec a` и `vec b`. Приведём эти векторы к одному началу `O` (рис. 10). Угол, образованный лучами, исходящими из точки `O` и направленными вдоль векторов `vec a` и `vec b`, называют углом между векторами `vec a` и `vec b`. Обозначим этот угол через `alpha`.
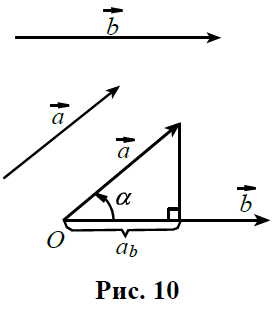
Число `a_b = a cos alpha` называется проекцией вектора `vec a` на направление вектора `vecb`. Проекция вектора `vec a` получается, если из его конца опустить перпендикуляр на направление вектора `vec b` (рис. 10), тогда расстояние от общего начала векторов — точки `O` — до точки пересечения указанного перпендикуляра с прямой, на которой лежит вектор `vecb`, будет равно модулю проекции вектора `vec a` на направление вектора `vec b`.
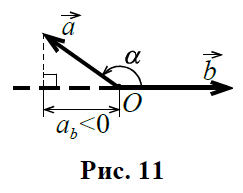
Угол `alpha` может принимать различные значения, поэтому в зависимости от знака `cos alpha` проекция может принимать положительные, отрицательные значения или нуль. Например, если угол `alpha` тупой, т. е. больше, чем `90^@`, но меньше `180^@`, то косинус такого угла отрицателен (см. рис. 11).
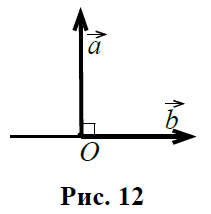
Проекция равна нулю, если направления векторов `vec a` и `vec b` взаимно перпендикулярны (см. рис. 12).
Проекции равных векторов на любые направления равны друг другу. Проекции противоположных векторов отличаются знаком.
Легко показать, что проекция суммы векторов равна алгебраической сумме их проекций и что при умножении вектора на число его проекция умножается на то же число.
2. Разложение вектора.
До сих пор мы говорили о сложении векторов. Для решения многих задач бывает необходимо произвести обратную процедуру — разложить вектор на составляющие, например, найти несколько сил, которые своим совместным действием могли бы заменить одну данную силу. Такая операция называется разложением сил.
Пусть на плоскости задан вектор `vec a` и две пересекающиеся в точке `O` прямые `AO` и `OB` (см. рис. 13).
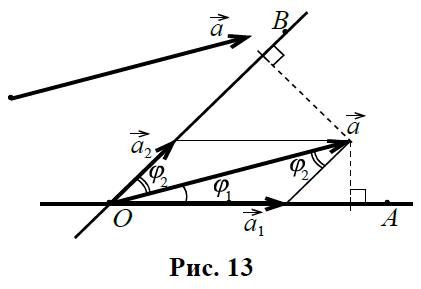
Вектор `vec a` можно представить в виде суммы двух векторов, направленных вдоль заданных прямых. Для этого параллельным переносом совместим начало вектора `vec a` с точкой `O` пересечения прямых. Из конца вектора `vec a` проведём два отрезка прямых, параллельных `AO` и `OB`. В результате получится параллелограмм. По построению
`vec a = vec(a_1) + vec(a_2)` (*)
Векторы `vec(a_1)` и `vec(a_2)` называются составляющими вектора `vec a` по заданным направлениям, а само представление вектора в виде суммы (*) — разложением вектора по двум направлениям.
В чём разница между проекцией вектора на ось и составляющей (компонентой) вектора вдоль этой оси?
Проекция вектора — скаляр; составляющая вектора вдоль этой оси — вектор, направленный вдоль этой оси.
Пусть `a = 1`, угол между прямыми `AO` и `OB` равен `varphi = 45^@`, а угол между векторами `vec a` и `vec(a_1)` равен `varphi = 15^@`. Определите модули векторов `vec a_1` и `vec a_2` в разложении (*), а также значения проекций вектора `vec a` на направления `vec(a_1)` и `vec(a_2)` (см. рис. 13).
`a_(a1) = a cos varphi_1 ~~ 0,97`, `a_(a2) = a cos varphi_2 = cos 30^@ ~~ 0,87`.
Далее по теореме синусов , `a_1/(sin varphi_2) = a/(sin (180^@ — varphi_1 — varphi_2))`,
откуда `a_1 = (sin varphi_2)/(sin (varphi_1 + varphi_2)) = (sin 30^@)/(sin 45^@) ~~ 0,71`
и аналогично `a_2 = (sin 15^@)/(sin 45^@) ~~ 0,37`.
3. Проектирование вектора на оси координат.
Особенно важен частный случай разложения вектора по двум взаимно перпендикулярным направлениям. Пусть на плоскости задана прямоугольная система координат `xOy` и некоторый вектор `vec a`. Отложим из начала координат вдоль положительного направления осей `Ox` и `Oy` векторы `vec i` и `vec j` соответственно такие, что `|vec i| = 1` и `|vec j| = 1`. Векторы `vec i` и `vec j` назовём единичными векторами.
Перенесём вектор `vec a` так, чтобы его начало совпало с началом координат. Пусть в этом положении он изображается направленным отрезком `AO` (рис. 14).
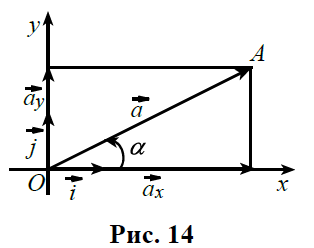
Опустим из точки `A` перпендикуляры на оси `Ox` и `Oy`. Тогда векторы `vec(a_x)` и `vec(a_y)` будут составляющими вектора `vec a` по координатным осям, причём вектор `vec(a_x)` будет коллинеарен вектору `vec i`, а вектор `vec(a_y)` — коллинеарен вектору `vecj`. Следовательно, существуют такие числа `a_x` и `a_y`, что `vec(a_x) = a_x vec i` и `vec(a_y) = a_y vec j`. Таким образом, вектор `vec a` может быть представлен в виде разложения по осям:
`vec a = vec(a_x) + vec(a_y) = a_x vec i + a_y vec j`. (3)
Числа `a_x` и `a_y` суть проекции вектора `vec a` на направления векторов `vec i` и `vec j` соответственно, то есть на оси `Ox` и `Oy`. Используется и иная, чем (3), форма записи векторов, а именно `vec a = (a_x ; a_y)`.
Иногда говорят о составляющей вектора вдоль одной единственной оси — без указания второй. Просто молчаливо предполагается, что вторая ось перпендикулярна первой (но почему-то не нарисована).
Пусть угол между положительным направлением оси `Ox` и вектором `vec a` равен `alpha` (рис.14). Тогда `a_x = a cos alpha`, `a_y = a sin alpha`.
В зависимости от значения угла `alpha` проекции вектора `vec a` на оси прямоугольной системы координат могут быть положительными, отрицательными или равными нулю.
Зная проекции вектора `vec a` на оси координат, можно найти его величину и направление по формулам:
`a = sqrt( a_x^2 + a_y^2)` (4)
и
`»tg» alpha = (a_y)/(a_x)` (5)
причём знаки `a_x` и `a_y` будут указывать на то, какому квадранту принадлежит значение `alpha`.
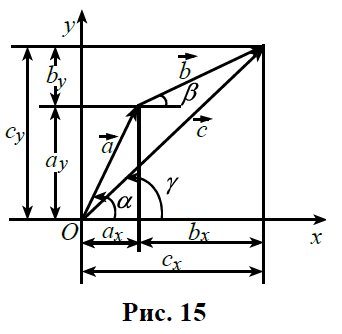
4. Пусть теперь нам задано векторное равенство `vec a + vec b = vec c` (рис. 15).
Проектируя все векторы на оси координат, получим очевидные равенства
`c_x = a_x + b_x`, `c_y = a_y + b_y`,
или
`c_x = a cos alpha + b cos beta`,
`c_y = a sin alpha + b sin beta`,
т. е. по проекциям векторов `vec a` и `vec b` легко находятся проекции суммарного вектора `vec c`.