Заказать задачи по любым предметам можно здесь от 10 минут
Как найти проекцию вектора на вектор?
Для того, чтобы найти проекцию вектора на вектор ($overline{a}$ на $overline{b}$) нужно разделить скалярное произведение этих векторов на длину последнего вектора $overline{b}$ по формуле: $$text{Пр}_{overline{b}} overline{a} = frac{(overline{a},overline{b})}{|overline{b}|}$$
| Пример 1 |
| Найти проекцию вектора $overline{a} = (1,2)$ на вектор $overline{b} = (-1,2)$ |
| Решение |
|
Вычисляем скалярное произведение векторов. Умножаем соответствующие координаты и складываем $$(overline{a},overline{b}) = 1 cdot (-1) + 2 cdot 2 = -1 + 4 = 3$$ Находим модуль вектора, на который ищем проекцию $$|overline{b}| = sqrt{(-1)^2 + 2^2} = sqrt{5}$$ Подставляя в формулу проекции вектора $overline{a}$ на направляющий вектор $overline{b}$ получаем искомое значение $$text{Пр}_{overline{b}} overline{a} = frac{3}{sqrt{5}}$$ Если не получается решить свою задачу, то присылайте её к нам. Мы предоставим подробное решение онлайн. Вы сможете ознакомиться с ходом вычисления и почерпнуть информацию. Это поможет своевременно получить зачёт у преподавателя! |
| Ответ |
| $$text{Пр}_{overline{b}} overline{a} = frac{3}{sqrt{5}}$$ |
| Пример 2 |
| Вычислить проекцию вектора на вектор, если $overline{a} = (1,2,-3)$ и $overline{b} = (2,1,1)$ |
| Решение |
|
Берем скалярное произведение двух векторов. Перемножаем попарно соответствующие координаты и суммируем полученные значения $$(overline{a},overline{b}) = 1 cdot 2 + 2 cdot 1 + (-3) cdot 1 = 2 + 2 — 3 = 1$$ Так как ищем проекцию на вектор $overline{b}$, то вычисляем его модуль (длину) $$|overline{b}| = sqrt{2^2 + 1^2 + 1^2} = sqrt{6}$$ По главной формуле получаем ответ к задаче $$text{Пр}_{overline{b}} overline{a} = frac{1}{sqrt{6}}$$ |
| Ответ |
| $$text{Пр}_{overline{b}} overline{a} = frac{1}{sqrt{6}}$$ |
Проекция вектора на ось. Проекция вектора на вектор
Навигация по странице:
- Определение проекции вектора на ось
- Определение проекции вектора на вектор
- Формула вычисления проекции вектора на вектор
- Примеры задач на проекцию вектора
- плоские задачи
- пространственные задачи
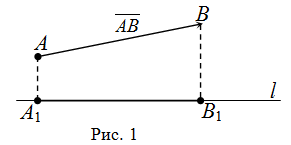
Определение. Проекцией вектора AB на ось l называется число, равное величине отрезка A1B1 оси l, где точки A1 и B1 являются проекциями точек A и B на ось l. (рис. 1).
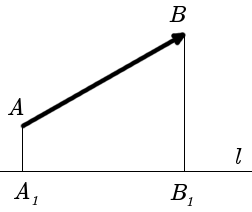 |
| рис. 1 |
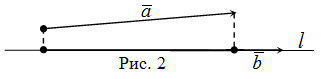
Определение. Проекцией вектора a на направление вектора b , называется число, равное величине проэкции вектора a на ось проходящую через вектор b.
Формула вычисления проекции вектора на вектор
Для вычисления проекции вектора a на направление вектора b из определения скалярного произведения получена формула:
Примеры задач на проекцию вектора
Примеры вычисления проекции вектора для плоских задач
Пример 1. Найти проекцию вектора a = {1; 2} на вектор b = {3; 4}.
Решение:
Найдем скалярное произведение этих векторов
a · b = 1 · 3 + 2 · 4 = 3 + 8 = 11
Найдем модуль вектора b
|b| = √32 + 42 = √9 + 16 = √25 = 5
Найдем проекцию вектора a на вектор b
| Пр ba = | a · b | = | 11 | = 2.2 |
| |b| | 5 |
Ответ: Пр ba = 2.2.
Примеры вычисления проекции вектора для пространственных задачи
Пример 2. Найти проекцию вектора a = {1; 4; 0} на вектор b = {4; 2; 4}.
Решение:
Найдем скалярное произведение этих векторов
a · b = 1 · 4 + 4 · 2 + 0 · 4 = 4 + 8 + 0 = 12
Найдем модуль вектора b
|b| = √42 + 22 + 42 = √16 + 4 + 16 = √36 = 6
Найдем проекцию вектора a на вектор b
| Пр ba = | a · b | = | 12 | = 2 |
| |b| | 6 |
Ответ: Пр ba = 2.
1.7.1. Как найти проекцию вектора на вектор?
Рассмотрим ненулевые векторы ![]() и
и ![]() :
:
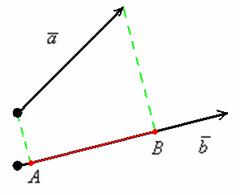
Спроецируем вектор ![]() на вектор
на вектор ![]() , для этого из начала и конца вектора
, для этого из начала и конца вектора ![]() опустим перпендикуляры на вектор
опустим перпендикуляры на вектор ![]() (зелёные пунктирные линии).
(зелёные пунктирные линии).
Представьте,
что на вектор ![]() перпендикулярно сверху падают
перпендикулярно сверху падают
лучи света. Тогда отрезок ![]() будет «тенью»
будет «тенью»
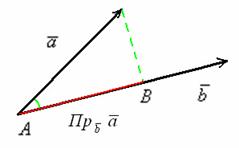
вектора ![]() . Проекцией вектора
. Проекцией вектора ![]() на вектор
на вектор ![]() является ДЛИНА отрезка
является ДЛИНА отрезка ![]() . То есть, ПРОЕКЦИЯ – ЭТО ЧИСЛО.
. То есть, ПРОЕКЦИЯ – ЭТО ЧИСЛО.
Это ЧИСЛО обозначается следующим образом: ![]() , «большим вектором» обозначают вектор КОТОРЫЙ проецируют,
, «большим вектором» обозначают вектор КОТОРЫЙ проецируют,
«маленьким подстрочным вектором» обозначают вектор НА который проецируют.
Сама запись ![]() читается так: «проекция
читается так: «проекция
вектора «а» на вектор «бэ»».
Если угол между векторами ![]() острый (как на рисунке выше), то
острый (как на рисунке выше), то ![]()
Если векторы ![]() ортогональны, то
ортогональны, то ![]() (проекцией является точка, размеры которой считаются нулевыми).
(проекцией является точка, размеры которой считаются нулевыми).
Если угол между векторами ![]() тупой (на рисунке мысленно переставьте стрелочку вектора
тупой (на рисунке мысленно переставьте стрелочку вектора ![]() ), то
), то ![]() (та же длина с добавленным знаком «минус»).
(та же длина с добавленным знаком «минус»).
Отвечу на назревший вопрос: что произойдёт, если вектор «бэ» будет «слишком коротким»? Проводим прямую линию, содержащую
вектор «бэ». И вектор «а» будет проецироваться уже на направление вектора «бэ», попросту – на прямую, содержащую
вектор «бэ». То же самое произойдёт, если вектор «а» отложить в тридесятом царстве – он всё равно легко спроецируется на
прямую, содержащую вектор «бэ».
Из вышесказанного следует, что проекция вектора ![]() на любой ненулевой сонаправленный вектор
на любой ненулевой сонаправленный вектор
![]() будет точно такой же:
будет точно такой же:
![]() – фактически это проекция вектора
– фактически это проекция вектора
![]() на прямую
на прямую ![]() , которая содержит сонаправленные векторы
, которая содержит сонаправленные векторы ![]() (и поскольку векторы свободны, то таких прямых будет
(и поскольку векторы свободны, то таких прямых будет
бесконечно много, все они будут параллельны друг другу);
а если векторы направлены противоположно ![]() , то
, то
добавится знак «минус»:
![]()
Отложим наши подопытные векторы от одной точки:
и рассмотрим прямоугольный треугольник. Косинус угла ![]() – есть отношение прилежащего катета к гипотенузе:
– есть отношение прилежащего катета к гипотенузе:
![]() , но с другой стороны, у нас уже получена
, но с другой стороны, у нас уже получена
формула косинуса угла между векторами:
…все ли догадались, что будет дальше?
Приравниваем формулы:
и сокращаем знаменатели обеих частей на ![]() ,
,
получая формулу для вычисления проекции:

Распишем её в координатах:
Если векторы плоскости ![]() и
и ![]() заданы в ортонормированном базисе
заданы в ортонормированном базисе ![]() , то проекция вектора
, то проекция вектора ![]() на вектор
на вектор ![]() выражается формулой:
выражается формулой:
![]()
Если векторы пространства ![]() заданы в ортонормированном базисе
заданы в ортонормированном базисе ![]() , то проекция вектора
, то проекция вектора ![]() на вектор
на вектор ![]() выражается формулой:
выражается формулой:
![]()
Легко убедиться, что проекция вектора ![]() на
на
коллинеарный вектор ![]() может
может
отличаться лишь знАком, приведу выкладки для «плоского» случая ![]() :
:
![]()
![]() , если
, если ![]() , и
, и ![]() , если
, если ![]()
Задача 34
Найти проекцию вектора ![]() на вектор
на вектор ![]()
Решение в одну строчку:
 , на завершающем шаге я умножил числитель и
, на завершающем шаге я умножил числитель и
знаменатель на ![]() , избавившись тем самым от
, избавившись тем самым от
иррациональности в знаменателе.
Ответ: ![]()
Проекция – это ДЛИНА, поэтому обязательно указываем размерность, правда, если получится знак «минус», то смотреться это
будет своеобразно.
Задача 35
Треугольник задан своими вершинами ![]() .
.
Найти:
а) проекцию стороны ![]() на сторону
на сторону ![]() ;
;
б) проекцию стороны ![]() на сторону
на сторону ![]() .
.
Это задача для самостоятельного решения.
Итак, как найти проекцию вектора ![]() на отрезок с известными концами
на отрезок с известными концами ![]() ? (как вариант, на продолжение этого отрезка). Находим вектор
? (как вариант, на продолжение этого отрезка). Находим вектор ![]() и используем формулу
и используем формулу  . Либо вектор
. Либо вектор ![]() и формулу
и формулу  . В
. В
одном из случаев получится отрицательное значение, и если оно вас напрягает, выберите другой вариант 
О проекции же вектора на прямую поговорим в следующей главе, а пока
выясним геометрический смысл координат векторов в ортонормированном базисе:
 1.7.2. Проекции вектора на координатные оси. Направляющие косинусы
1.7.2. Проекции вектора на координатные оси. Направляющие косинусы
 1.6.9. Как найти угол между векторами в координатах?
1.6.9. Как найти угол между векторами в координатах?
| Оглавление |
Автор: Aлeксaндр Eмeлин
Время на прочтение
10 мин
Количество просмотров 12K
В настоящий момент появилось достаточно большое количество библиотек дополненной реальности с богатым функционалом (ARCore, ARKit, Vuforia). Тем не менее я решил начать свой открытый проект, попутно описывая как это работает изнутри. Если повезет, то позже получится добавить какой-то особый интересный функционал, которого нет в других библиотеках. В качестве целевых платформ пока возьмем Windows и Android. Библиотека пишется на C++, и сторонние библиотеки будут задействованы по минимуму, т.е. преимущественно не будет использовано ничего готового. Фокус в статьях будет направлен на алгоритмы и математику, которые постараюсь описать максимально доступно и подробно. В этой статье пойдет речь про основы векторной алгебры.
Дополненная реальность — это совмещение виртуального мира и реального. Для этого, нам нужно представить окружающее реальное пространство в виде математической модели, понимая закономерности которой, мы сможем получить данные для совмещения. Начнем с основ векторной алгебры.
Вектора — это частный случай матриц, состоящие либо из одного столбца, либо из одной строки. Когда мы говорим о векторе, обычно имеется вектор-столбец  . Но записывать вектор как столбец неудобно, поэтому будем его транспонировать —
. Но записывать вектор как столбец неудобно, поэтому будем его транспонировать —  .
.
Длина вектора
Первое, что мы рассмотрим — получение длины вектора —  , где
, где  — значение длины,
— значение длины,  — наш вектор. Для примера возьмем двумерный вектор:
— наш вектор. Для примера возьмем двумерный вектор:

 , где
, где  и
и  — компоненты вектора, значения проекций вектора на оси двумерных координат. И мы видим прямоугольный треугольник, где и — это длины катетов, а — длина его гипотенузы. По теореме Пифагора получается, что
— компоненты вектора, значения проекций вектора на оси двумерных координат. И мы видим прямоугольный треугольник, где и — это длины катетов, а — длина его гипотенузы. По теореме Пифагора получается, что  . Значит
. Значит  . Вид формулы сохраняется и для векторов большей размерности, например —
. Вид формулы сохраняется и для векторов большей размерности, например —  .
.
Скалярное произведение
Скалярное произведение векторов — это сумма произведение их компонентов:  . Но так как мы знаем, что вектора — это матрицы, то тогда удобнее записать это в таком виде:
. Но так как мы знаем, что вектора — это матрицы, то тогда удобнее записать это в таком виде:  . Это же произведение можно записать в другой форме:
. Это же произведение можно записать в другой форме:  , где
, где  — угол между векторами
— угол между векторами  и
и  (для двумерного случая эта формула доказывается через теорему косинусов). По этой формуле можно заключить, что скалярное произведение — это мера сонаправленности векторов. Ведь, если
(для двумерного случая эта формула доказывается через теорему косинусов). По этой формуле можно заключить, что скалярное произведение — это мера сонаправленности векторов. Ведь, если  , то
, то  , и
, и  — это просто произведение длин векторов. Так как
— это просто произведение длин векторов. Так как  — не может быть больше 1, то это максимальное значение, которые мы можем получить, изменяя только угол . Минимальное значение будет равно -1, и получается при
— не может быть больше 1, то это максимальное значение, которые мы можем получить, изменяя только угол . Минимальное значение будет равно -1, и получается при  , т.е. когда вектора смотрят в противоположные направления. Также заметим, что при
, т.е. когда вектора смотрят в противоположные направления. Также заметим, что при 
 , а значит какие бы длины не имели вектора и , все равно
, а значит какие бы длины не имели вектора и , все равно  . Можно в таком случае сказать, что вектора не имеют общего направления, и называются ортогональными.
. Можно в таком случае сказать, что вектора не имеют общего направления, и называются ортогональными.
Также при помощи скалярного произведения, мы можем записать формулу длины вектора красивее:  ,
,  .
.
Проекция вектора на другой вектор
Возьмем два вектора: и .
Проекцию вектора на другой вектор можно рассматривать в двух смыслах: геометрическом и алгебраическом. В геометрическом смысле проекция вектора на ось — это вектор, а в алгебраическом – число.
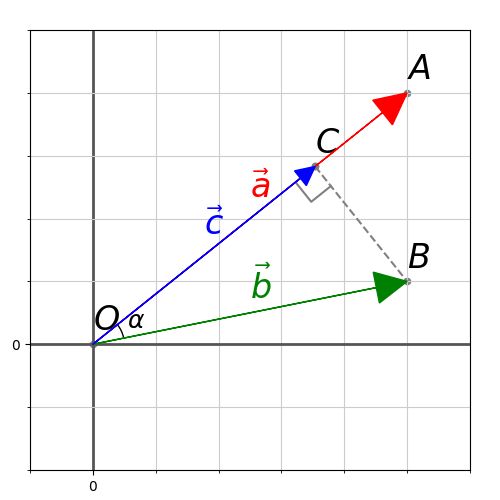
Вектора — это направления, поэтому их начало лежит в начале координат. Обозначим ключевые точки:  — начало координат,
— начало координат,  — конечная точка вектора ,
— конечная точка вектора ,  — конечная точка вектора .
— конечная точка вектора .
В геометрическом смысле мы ищем такой  , чтобы конечная точка вектора (обозначим ее как —
, чтобы конечная точка вектора (обозначим ее как —  ) была ближайшей точкой к точке , лежащей на прямой
) была ближайшей точкой к точке , лежащей на прямой  .
.
Иначе говоря, мы хотим найти составляющую в , т.е. такое значение  , чтобы
, чтобы  и
и 
Расстояние между точками и будет минимальным, если  . Получаем прямоугольный треугольник —
. Получаем прямоугольный треугольник —  . Обозначим
. Обозначим  . Мы знаем, что
. Мы знаем, что  по определению косинуса через соотношение сторон прямоугольного треугольника
по определению косинуса через соотношение сторон прямоугольного треугольника
( — гипотенуза,
— гипотенуза,  — прилежащий катет).
— прилежащий катет).
Также возьмем скалярное произведение  . Отсюда следует, что
. Отсюда следует, что  . А значит
. А значит  .
.
Тут вспоминаем, что — это искомый вектор , а — , и получаем  . Умножаем обе части на
. Умножаем обе части на  и получаем —
и получаем —  . Теперь мы знаем длину . Вектор отличается от вектора длинной, но не направлением, а значит через соотношение длин можно получить:
. Теперь мы знаем длину . Вектор отличается от вектора длинной, но не направлением, а значит через соотношение длин можно получить:  . И мы можем вывести финальные формулы:
. И мы можем вывести финальные формулы:
 и
и

Нормализованный вектор
Хороший способ упростить работу над векторами — использовать вектора единичной длины. Возьмем вектор и получим сонаправленный вектор  единичной длины. Для этого вектор разделим на его длину:
единичной длины. Для этого вектор разделим на его длину:  . Эта операция называется нормализацией, а вектор — нормализованным.
. Эта операция называется нормализацией, а вектор — нормализованным.
Зная нормализованный вектор и длину исходного вектора, можно получить исходный вектор:  .
.
Зная нормализованный вектор и исходный вектор, можно получить его длину:  .
.
Хорошим преимуществом нормализованных векторов является то, что сильно упрощается формула проекции (т.к. длина равна 1, то она сокращается). Проекция вектора на единичной длины:


Матрица поворота двумерного пространства
Предположим у нас есть некая фигура:
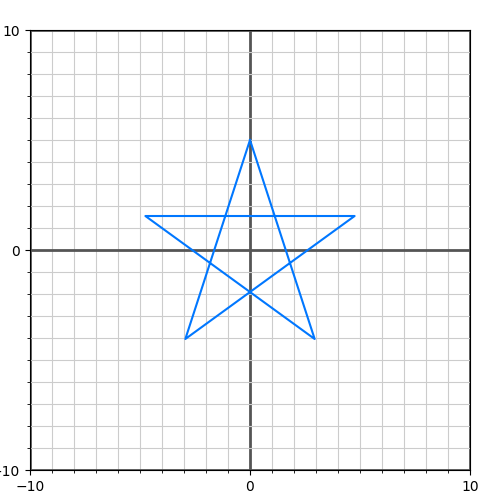
Чтобы ее нарисовать, заданы координаты ее вершин, от которых строятся линии. Координаты заданы в виде набора векторов следующим образом  . Наша координатная сетка задана двумя осями — единичными ортогональными (перпендикулярными) векторами. В двумерном пространстве можно получить два перпендикулярных вектора к другому вектору такой же длины следующим образом:
. Наша координатная сетка задана двумя осями — единичными ортогональными (перпендикулярными) векторами. В двумерном пространстве можно получить два перпендикулярных вектора к другому вектору такой же длины следующим образом:  — левый и правый перпендикуляры. Берем вектор, задающим ось
— левый и правый перпендикуляры. Берем вектор, задающим ось  —
—  и ось
и ось  — левый к нему перпендикуляр —
— левый к нему перпендикуляр —  .
.
Выведем новый вектор, получаемый из наших базисный векторов:

Сюрприз — он совпадает с нашим исходным вектором.
Теперь попробуем как-то изменить нашу фигуру — повернем ее на угол  . Для этого повернем векторы
. Для этого повернем векторы  и
и  , задающих оси координат. Поворот вектора
, задающих оси координат. Поворот вектора  задается косинусом и синусом угла —
задается косинусом и синусом угла —  . А чтобы получить вектор оси , возьмем перпендикуляр к :
. А чтобы получить вектор оси , возьмем перпендикуляр к :  . Выполнив эту трансформацию, получаем новую фигуру:
. Выполнив эту трансформацию, получаем новую фигуру:

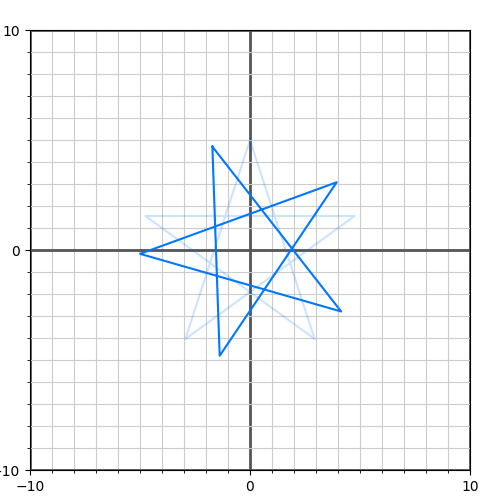
Вектора и являются ортонормированным базисом, потому как вектора ортогональны между собой (а значит базис ортогонален), и вектора имеют единичную длину, т.е. нормированы.
Теперь мы говорим о нескольких системах координат — базовой системы координат (назовем ее мировой), и локальной для нашего объекта (которую мы поворачивали). Удобно объединить наш набор векторов в матрицу — 
Тогда  .
.
В итоге —  .
.
Матрица  , составляющая ортонормированный базис и описывающая поворот, называется матрицей поворота.
, составляющая ортонормированный базис и описывающая поворот, называется матрицей поворота.
Также матрица поворота имеет ряд полезных свойств, которые следует иметь ввиду:
- При
 , где — единичная матрица, матрица соответствует нулевому повороту (угол ), и в таком случае локальные оси совпадают с мировыми. Как рассматривали выше, матрица никак не меняет исходный вектор.
, где — единичная матрица, матрица соответствует нулевому повороту (угол ), и в таком случае локальные оси совпадают с мировыми. Как рассматривали выше, матрица никак не меняет исходный вектор. - — определитель матрицы равен 1, если у нас, как обычно бывает, правая тройка векторов. , если тройка векторов левая.
- .
- .
. - , поворот не меняет длины вектора.
- зная и , можем получить исходный вектор — . Т.е. умножая вектор на матрицу поворота мы выполняем преобразование координат вектора из локальной системы координат объекта в мировую, но также мы можем поступать и наоборот — преобразовывать мировые координаты в локальную систему координат объекта, умножая на обратную матрицу поворота.
 , где
, где  — единичная матрица, матрица соответствует нулевому повороту (угол
— единичная матрица, матрица соответствует нулевому повороту (угол  ), и в таком случае локальные оси совпадают с мировыми. Как рассматривали выше, матрица никак не меняет исходный вектор.
), и в таком случае локальные оси совпадают с мировыми. Как рассматривали выше, матрица никак не меняет исходный вектор. — определитель матрицы равен 1, если у нас, как обычно бывает, правая тройка векторов.
— определитель матрицы равен 1, если у нас, как обычно бывает, правая тройка векторов.  , если тройка векторов левая.
, если тройка векторов левая.  .
.  .
. .
. , поворот не меняет длины вектора.
, поворот не меняет длины вектора. и
и  . Т.е. умножая вектор на матрицу поворота мы выполняем преобразование координат вектора из локальной системы координат объекта в мировую, но также мы можем поступать и наоборот — преобразовывать мировые координаты в локальную систему координат объекта, умножая на обратную матрицу поворота.
. Т.е. умножая вектор на матрицу поворота мы выполняем преобразование координат вектора из локальной системы координат объекта в мировую, но также мы можем поступать и наоборот — преобразовывать мировые координаты в локальную систему координат объекта, умножая на обратную матрицу поворота.Теперь попробуем повернуть наш объект два раза, первый раз на угол , второй раз на угол  . Матрицу, полученную из угла , обозначим как
. Матрицу, полученную из угла , обозначим как  , из угла —
, из угла —  . Распишем наше итоговое преобразование:
. Распишем наше итоговое преобразование:
 .
.

Обозначим  , тогда
, тогда  . И из двух операций мы получили одну. Так как поворот — это линейное преобразование (описали ее при помощи одной матрицы), множество преобразований можно описать одной матрицей, что сильно упрощает над ними работу.
. И из двух операций мы получили одну. Так как поворот — это линейное преобразование (описали ее при помощи одной матрицы), множество преобразований можно описать одной матрицей, что сильно упрощает над ними работу.
Масштабирование в двумерном пространстве
Масштабировать объект достаточно просто, нужно только умножить координаты точек на коэффициент масштаба:  . Если мы хотим масштабировать объект на разную величину по разным осям, то формула принимает вид:
. Если мы хотим масштабировать объект на разную величину по разным осям, то формула принимает вид:  . Для удобства переведем операцию в матричный вид:
. Для удобства переведем операцию в матричный вид:  .
.
Теперь предположим, что нам нужно повернуть и масштабировать наш объект. Нужно отметить, что если сначала масштабировать, а затем повернуть, то результат будет отличаться, от того результата, где мы сначала повернули, а затем масштабировали:
Сначала поворот, а затем масштабирование по осям:

Сначала масштабирование по осям, а затем поворот:

Как мы видим порядок операций играет большое значение, и его нужно обязательно учитывать.
Также здесь мы также можем объединять матрицы преобразования в одну:



Хотя в данном случае, если  , то
, то  . Тем не менее, с порядком преобразований нужно быть очень аккуратным. Их нельзя просто так менять местами.
. Тем не менее, с порядком преобразований нужно быть очень аккуратным. Их нельзя просто так менять местами.
Векторное произведение векторов
Перейдем в трехмерное пространство и рассмотрим определенное на нем векторное произведение.
Векторное произведение двух векторов в трёхмерном пространстве — вектор, ортогональный к обоим исходным векторам, длина которого равна площади параллелограмма, образованного исходными векторами.
Для примера возьмем два трехмерных вектора — , . И в результате векторного произведения получим 
Визуализируем данную операцию:
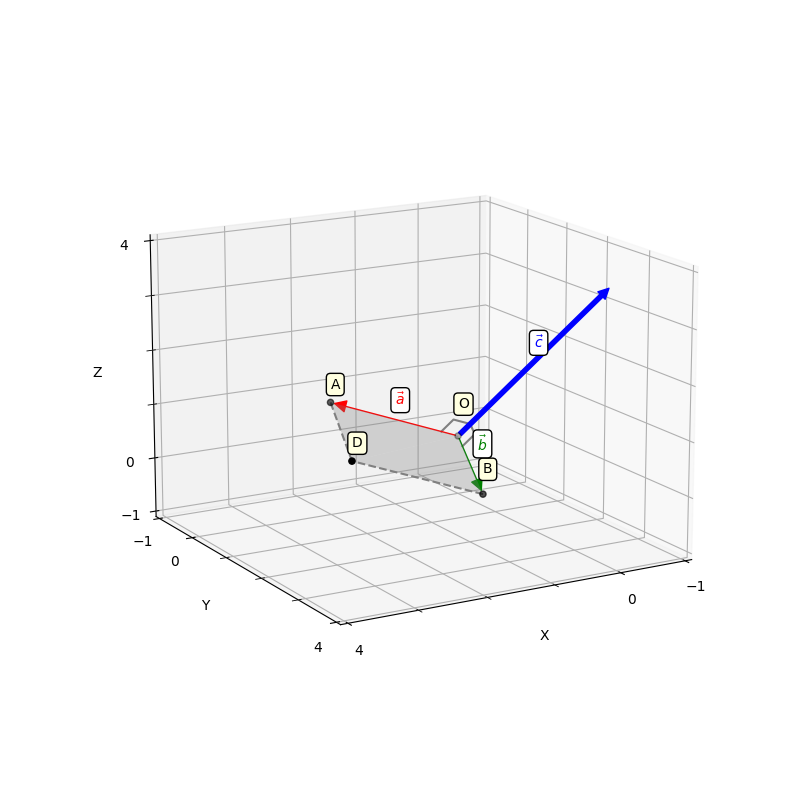
Здесь наши вектора , и . Вектора начинаются с начала координат, обозначенной точкой . Конечная точка вектора — точка . Конечная точка — точка . Параллелограмм из определения формируются точками , , ,  . Координаты точки находим как —
. Координаты точки находим как —  . В итоге имеем следующие соотношения:
. В итоге имеем следующие соотношения:
Два вектора образуют плоскость, а векторное произведение позволяет получить перпендикуляр к этой плоскости. Получившиеся вектора образуют образуют правую тройку векторов. Если берем обратный вектор, то получаем второй перпендикуляр к плоскости, и тройка векторов будет уже левой.
Для запоминания этой формулы удобно использовать мнемонический определитель. Пусть  , и мы раскладываем определить по строке как сумму определителей миноров исходной матрицы
, и мы раскладываем определить по строке как сумму определителей миноров исходной матрицы  :
:


Некоторые удобные свойства данного произведения:
- Если два вектора ортогональны и нормализованы, то вектор также будет иметь единичную длину. Параллелограмм, который образуется двумя исходными векторами, станет квадратом с длинной сторон равной единице. Т.е. площадь равна единице, отсюда длина выходного вектора — единица.

Матрица поворота трехмерного пространства.
С тем, как формировать матрицу в двумерном пространстве мы разобрались. В трехмерном она формируется уже не двумя, а тремя ортогональными векторами —  . По свойствам, описанным выше, можно вывести следующие отношения между этими векторам:
. По свойствам, описанным выше, можно вывести следующие отношения между этими векторам:
Вычислить вектора этих осей сложнее, чем в матрице поворота двумерного пространства. Для примера получения этих векторов рассмотрим алгоритм, который в трехмерных движках называется lookAt. Для этого нам понадобятся вектор направления взгляда —  и опорный вектор для оси —
и опорный вектор для оси —  . Сам алгоритм:
. Сам алгоритм:
- Обычно направление камеры совпадает с осью . Поэтому нормализуем и получаем ось — .
- Получаем вектор оси — . В итоге у нас есть два нормализованных ортогональных вектора и , описывающих оси и , при этом ось сонаправлена с входным вектором , а ось перпендикулярна к входному опорному вектору .
- Получаем вектор оси из полученных и — .
- В итоге
 .
. . В итоге у нас есть два нормализованных ортогональных вектора
. В итоге у нас есть два нормализованных ортогональных вектора  , описывающих оси
, описывающих оси  .
.В трехмерных редакторах и движках в интерфейсах часто используются углы Эйлера для задания поворота. Углы Эйлера более интуитивно понятны — это три числа, обозначающие три последовательных поворота вокруг трех основных осей  . Однако, работать с ними не очень то просто. Если попробовать выразить итоговый вектор напрямую через эти повороты, то получим довольно объемную формулу, состоящую из синусов и косинусов наших углов. Есть еще пара проблем с этими углами. Первая проблема — это то, что сами по себе углы не задают однозначного поворота, так как результат зависит от того, в какой последовательности происходили повороты —
. Однако, работать с ними не очень то просто. Если попробовать выразить итоговый вектор напрямую через эти повороты, то получим довольно объемную формулу, состоящую из синусов и косинусов наших углов. Есть еще пара проблем с этими углами. Первая проблема — это то, что сами по себе углы не задают однозначного поворота, так как результат зависит от того, в какой последовательности происходили повороты —  или
или  или как-то еще. Углы Эйлера — это последовательность поворотов, а как мы помним, смена порядка трансформаций меняет итоговый результат. Вторая проблема — это gimbal lock.
или как-то еще. Углы Эйлера — это последовательность поворотов, а как мы помним, смена порядка трансформаций меняет итоговый результат. Вторая проблема — это gimbal lock.
Внутри же трехмерные движки чаще всего используют кватернионы, которых мы касаться не будем.
Существуют разные способы задания поворота в трехмерном пространстве, и каждый имеет свои плюсы и минусы:
- Матрица поворота. С ней просто работать (т.к. это просто матрицы). Но есть логическая избыточность данных — все элементы матрицы связаны определенными условиями, так как количество элементов больше степеней свободы (12 элементов против трех степеней). Т.е. мы не можем взять матрицу и наполнить ее случайными числами, так при несоблюдении условий матрица просто не будет являться матрицей поворота.
- Углы Эйлера. Они интуитивно понятны, но работать с ними сложно.
- Вектор оси вращения и угол порота вокруг нее. Любой возможный поворот можно описать таким образом. Поворота вектора вокруг заданной оси рассмотрим ниже.
- Вектор поворота Родрига. Это трехмерный вектор, где нормализованный вектор представляет собой ось вращения, а длина вектора угол поворота. Этот способ задания поворота похож на предыдущий способ, но количество элементов здесь равно числу степеней свободы, и элементы не связаны между собой жесткими ограничениями. И мы можем взять трехмерный вектор с абсолютно случайными числами, и любой полученный вектор будет задавать какое-то возможное вращение.
Поворот вектора вокруг заданной оси
Теперь рассмотрим операцию, позволяющую реализовать поворот вектора вокруг оси.
Возьмем вектор  — описывающий ось, вокруг которой нужно повернуть вектор на угол . Результирующий вектор обозначим как
— описывающий ось, вокруг которой нужно повернуть вектор на угол . Результирующий вектор обозначим как  . Иллюстрируем процесс:
. Иллюстрируем процесс:

Вектор мы можем разложить сумму векторов: вектора, параллельный к вектору —  , и вектора, перпендикулярному к вектору к вектору —
, и вектора, перпендикулярному к вектору к вектору —  .
.
 .
.
Вектор — это проекция вектора на вектор . Т.к. — нормализованный вектор, то:

Та часть , которая принадлежит оси вращения () не измениться во время вращения. Повернуть нам нужно только в плоскости перпендикулярной к на угол , Обозначим этот вектор как  . Тогда наш искомый вектор —
. Тогда наш искомый вектор —  .
.
Вектор можем найти следующим образом:

Для того, чтобы повернуть , выведем оси и в плоскости, в которой будем выполнять поворот. Это должны быть два ортогональных нормализованных вектора, ортогональных к . Один ортогональный вектор у нас уже есть — , нормализуем его и обозначим как ось —  .
.
Теперь получим вектор оси . Это должен быть вектор, ортогональный к и (т.е. и к ). Получить его можно через векторное произведение:  . Значит
. Значит  . По свойству векторного произведения
. По свойству векторного произведения  будет равно площади параллелограмма, образуемого двумя исходными векторами ( и ). Так как вектора ортогональны, то у нас будет не параллелограмм, а прямоугольник, а значит
будет равно площади параллелограмма, образуемого двумя исходными векторами ( и ). Так как вектора ортогональны, то у нас будет не параллелограмм, а прямоугольник, а значит  .
.  . Значит
. Значит  .
.
Поворот двумерного вектора  на угол можно получить через синус и косинус —
на угол можно получить через синус и косинус —  . Т.к. в координатах полученной плоскости сонаправлен с осью , то он будет равен
. Т.к. в координатах полученной плоскости сонаправлен с осью , то он будет равен  . Этот вектор после поворота —
. Этот вектор после поворота —  . Отсюда можем вывести:
. Отсюда можем вывести: 



Теперь мы можем получить наш искомый вектор:

Мы разобрались с тем, как поворачивать вектор вокруг заданной оси на заданный угол, значит теперь мы умеем использовать поворот, заданный таким образом.
Получить вектор оси вращения и угол из вектора Родрига не составляет большого труда, а значит мы теперь умеем работать и с ним тоже.
Напоминаю, что матрица поворота представляет собой три базисных вектора , а углы Эйлера — три последовательных поворота вокруг осей , ,  . Значит мы можем взять единичную матрицу, как нулевой поворот
. Значит мы можем взять единичную матрицу, как нулевой поворот  , а затем последовательно поворачивать базисные вектора вокруг нужных нам осей. В результате получим матрицу поворота соответствующую углам Эйлера. Например:
, а затем последовательно поворачивать базисные вектора вокруг нужных нам осей. В результате получим матрицу поворота соответствующую углам Эйлера. Например:





Также можно отдельно вывести матрицы вращения по каждой из осей , , ( ,
,  ,
,  соответственно) и получить итоговую матрицу последовательным их умножением:
соответственно) и получить итоговую матрицу последовательным их умножением:

Таким же образом можно перевести вектор поворота Родрига в матрицу поворота: также поворачиваем оси матрицы поворота, полученные от единичной матрицы.
Итак, с вращением объекта разобрались. Переходим к остальным трансформациям.
Масштабирование в трехмерном пространстве
Все тоже самое что и двумерном пространстве, только матрица масштабирования принимает вид: 
Перемещение объекта
До этого момента точка начала локальных координат не смещалась в мировом пространстве. Так как точка начала координат нашего объекта — это его центр, то центр объект никуда не смещался. Реализовать это смещение просто:  , где
, где  — вектор, задающий смещение.
— вектор, задающий смещение.
Теперь мы умеем масштабировать объект по осям, поворачивать его и перемещать.
Объединим все одной формулой:  :
:

Чтобы упростить формулу, мы можем, как уже делали ранее, объединить матрицы  . В итоге наше преобразование описывает матрица
. В итоге наше преобразование описывает матрица  и вектор . Объединение вектора с матрицей еще более бы упростило формулу, однако сделать в данном случае не получится, потому как сложение здесь — это не линейная операция. Тем не менее сделать это возможно, и рассмотрим этот момент уже в следующей статье.
и вектор . Объединение вектора с матрицей еще более бы упростило формулу, однако сделать в данном случае не получится, потому как сложение здесь — это не линейная операция. Тем не менее сделать это возможно, и рассмотрим этот момент уже в следующей статье.
Заключение
Для какого-то покажется, что статья описывает очевидные вещи, кому-то может показаться наоборот немного запутанной. Тем не менее это базовый фундамент, на котором будет строиться все остальное. Векторная алгебра — является фундаментом для многих областей, так что статья может вам оказаться полезной не только в дополненной реальности. Следующая статья будет уже более узконаправленной.
Проекция вектора на вектор
Определение и формула проекции вектора на вектор
Проекцией вектора  на ось
на ось  называется число, которое равно величине отрезка
называется число, которое равно величине отрезка  , принадлежащего указанной оси, где точки
, принадлежащего указанной оси, где точки  и
и  – проекции точек
– проекции точек  и
и  на рассматриваемую ось соответственно (рис. 1).
на рассматриваемую ось соответственно (рис. 1).
Проекция вектора  на направление вектора
на направление вектора  равна скалярному произведению этих векторов, деленному на длину вектора :
равна скалярному произведению этих векторов, деленному на длину вектора :
![[{Pi text{p}}_{bar{b}} bar{a}=frac{left(bar{a},; bar{b}right)}{left|bar{b}right|} ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-86442d66cfafef044cc11e06dcf15f5f_l3.png "Rendered by QuickLaTeX.com")
Примеры нахождения проекции вектора на вектор
ПРИМЕР
| Задание | Найти проекцию вектора  на вектор на вектор 
|
| Решение |
Вычислим скалярное произведение заданных векторов. Оно равно сумме произведений соответствующих координат векторов-сомножителей
Модуль вектора Тогда искомая проекция |
| Ответ | 
|
![[bar{a}cdot bar{b}=0cdot 1+left(-1right)cdot left(-1right)=0+1=1]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-851d5c795ad8c6ecc29675bab3b0fa37_l3.png "Rendered by QuickLaTeX.com")
![[left|bar{b}right|=sqrt{1^{2} +left(-1right)^{2} } =sqrt{1+1} =sqrt{2} ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-015d03a6482a490c278644e8452dc94d_l3.png "Rendered by QuickLaTeX.com")
![[{Pi text{p}}_{bar{b}} bar{a}=frac{1}{sqrt{2} } =frac{sqrt{2} }{2} ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-fa12e67cd2441ab7076cd248fe72d805_l3.png "Rendered by QuickLaTeX.com")
ПРИМЕР
| Задание | Найти модуль вектора , если известно, что проекция вектора на него равна 2, а скалярное произведение этих векторов 
|
| Решение |
Согласно формуле имеем, что
Тогда |
| Ответ | 
|
![[{Pi text{p}}_{bar{b}} bar{a}=frac{left(bar{a},; bar{b}right)}{left|bar{b}right|} Leftrightarrow 2=frac{4}{left|bar{b}right|} ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-4b180d797414af935e6af87b73db117b_l3.png "Rendered by QuickLaTeX.com")
![[left|bar{b}right|=frac{4}{2} =2]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-d1ed518663ceb9079a66d5790015e694_l3.png "Rendered by QuickLaTeX.com")

| Понравился сайт? Расскажи друзьям! | |