Напишем основные
правила дифференцирования векторных
функций.
1.
![]()
,
![]()
− постоянный вектор;
2.
![]()
;
3.
![]()
,
где т
= т(t)
− скалярная функция;
4
![]()
;
5.
![]()
.
Пример.
Найти производную скалярного произведения
векторов
![]()
и
![]()
.
□ Имеем
![]()
![]()
![]()
+
![]()
![]()
=
=
−6 + 6 = 0.
Полученный
результат объясняется тем, что скалярное
произведение заданных векторов
![]()
,
т.е. является постоянной величиной.
■
По аналогии с
дифференциалом скалярной функции
дифференциал векторной функции
есть вектор
![]()
,
определяемы равенством
![]()
,
где
![]()
− приращение скалярного аргумента t.
Дифференциал
вектора
,
как и производная
![]()
вектора
,
лежит на касательной к годографу.
Направление
на этой касательной зависит от знака
![]()
:
при
![]()
вектор
направлен в сторону возрастания
аргумента t,
при
![]()
,
наоборот, в сторону его убывания.
Дифференциал
векторной функции в проекциях:
![]()
или
![]()
,
где
![]()
− дифференциалы скалярных функций
![]()
.
Модуль дифференциала
векторной функции :
![]()
.
В
частности, для дифференциала радиус-вектора
точки
![]()
и его модуля имеем
![]()
и
![]()
.
С
другой стороны, дифференциал длины дуги
кривой
![]()
определяется формулой
![]()
.
Следовательно,
![]()
,
т.е.
модуль дифференциала радиус-вектора
точки равен дифференциалу длины дуги,
описываемой этой точкой.
Рассмотрим единичный
вектор
![]()
,
изменяющийся при изменении скаляра t
только по направлению. В этом случае
![]()
и
модуль вектора приращения
![]()
определяется из равенства
![]()
,
где
![]()
− угол смежности векторов
и
![]()
.
Отсюда следует, что


![]()
.
Рассматривая
аргумент t
как время, можно интерпретировать
производную
![]()
как угловую скорость вращения единичного
вектора.
Производная
от единичного вектора
есть вектор, перпендикулярный к нему,
модуль которого равен угловой скорости
вращения.
Отсюда
следует, что производная единичного
вектора, вообще говоря, не есть единичный
вектор; она будет таковым, если вращение
первоначального вектора происходит
равномерно.
Пусть векторная
функция
скалярного аргумента t
изменяется как по величине, так и по
направлению. Вектор
можно представить как произведение его
модуля
![]()
и единичного вектора его направления
:
![]()
.
Тогда
![]()
.
Вектор
![]()
,
как производная единичного вектора,
перпендикулярен вектору
![]()
и тем самым вектору
.
Следовательно, первое слагаемое
![]()
есть вектор, перпендикулярный вектору
,
а слагаемое
![]()
− вектор, ему параллельный. Таким
образом, последняя формула дает разложение
производной
от вектора
по направлению первоначального вектора
и к нему перпендикулярному.
Когда вектор
изменяется только по модулю, то вектор
сохраняет постоянное направление и
![]()
= 0. Если же вектор
имеет постоянный модуль, то
![]()
= 0. В этом случае
образует с вектором
прямой угол.
§ 4. Некоторые приложения векторных функций скаляроного аргумента
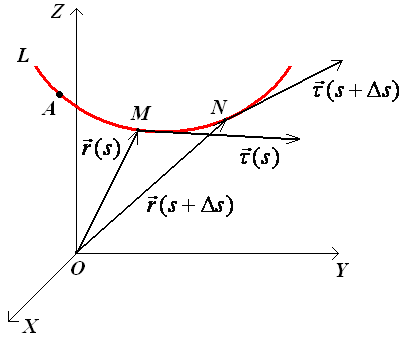
Пусть точка М(х,
y,
z)
описывает кривую L
в пространстве. Параметром, определяющим
положение точки М
на кривой, будем считать длину s
дуги АМ
кривой, отсчитываемую от определенной
точки А
кривой до точки М.
Радиус-вектор
точки М
будет функцией скалярного аргумента
s:
![]()
.
В
проекциях радиус-вектор точки запишется
как
![]()
,
где
![]()
− скалярные функции длины дуги s.
При этом величина s
считается положительной, если она
отложена в определенную сторону от
точки А,
которую мы примем за положительную, и
отрицательной, если она отложена в
другую сторону.
Продифференцируем
вектор
по скаляру s.
Получим вектор
![]()
,
направленный
по касательной к кривой в сторону
возрастания s.
Модуль этого вектора
![]()
.
Следовательно,
вектор
![]()
есть единичный вектор касательной к
кривой, направленный в сторону возрастания
s.
В проекциях
![]()
(1)
и
![]()
.
Так как единичный
вектор касательной
лежит на самой касательной, то уравнения
касательной к кривой в точке М,
как известно из аналитической геометрии,
напишутся так:
,
(2)
где
X,
Y,
Z
− текущие координаты точки на касательной,
а x,
y,
z
− координаты точки касания, причем
значения производных
![]()
берутся
в точке касания.
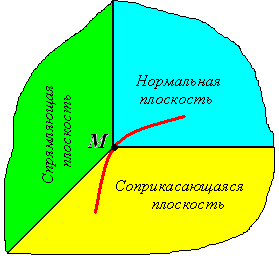
Плоскость,
перпендикулярная касательной и проходящая
через точку касания, называется
нормальной
плоскостью.
Любая
прямая, лежащая в этой плоскости и
пересекающая кривую в точке касания
М,
будет нормалью кривой.
Уравнение нормальной
плоскости можно получить, используя
условия перпендикулярности прямой и
плоскости. В результате получим
![]()
,
(3)
где
X,
Y,
Z
− текущие координаты точки на нормальной
плоскости.
Вектор
![]()
,
как производная единичного вектора
,
перпендикулярен к последнему. Поэтому
вектор
лежит в нормальной плоскости и определяет
некоторую нормаль, называемую главной
нормалью.
Модуль
![]()
называют кривизной
кривой.
Обозначим ее через К
=
![]()
,
где R
− радиус
кривизны
:
К
=
=
.
В
проекциях
![]()
![]()
.
(4)
Тогда
кривизна найдется по формуле
К
=

.
(5)
В
соответствии с (4) уравнения главной
нормали имеют вид

,
(6)
где
X,
Y,
Z
− текущие координаты точки на главной
нормали.
Плоскость,
перпендикулярная главной нормали и
проходящая через точку касания, называется
спрямляющей
плоскостью
кривой. Она
определяется уравнением
![]()
.
(7)
Плоскость, проходящая
через касательную и главную нормаль,
называется соприкасающейся
плоскостью.
Эту плоскость можно определить как
предельное положение плоскости,
проходящей через три точки кривой, когда
эти точки стремятся слиться в одну.
Если кривая –
плоская, то касательные ко всем ее точкам
находятся в одной плоскости – плоскости
кривой. В этом случае соприкасающаяся
плоскость совпадает с плоскостью кривой
и будет одна и та же для всех ее точек.
Главная нормаль кривой будет совпадать
с нормалью, определенной на плоскости.
Пример.
Составить уравнения касательной и
нормальной плоскости к кривой
![]()
![]()
![]()
в
точке
![]()
.
□ Имеем
уравнения
касательной:

;
уравнение
нормальной плоскости:
![]()
.
Находим
![]()
,
![]()
,
![]()
.
При
имеем
![]()
,
![]()
,
![]()
,
![]()
,
![]()
,
![]()
.
Уравнения
касательной:
.
Уравнение
нормальной плоскости:
![]()
или
![]()
.
■
Пример.
Составить уравнения винтовой линии,
если радиус основания цилиндра R
= 4, шаг h
=
![]()
,
и найти дифференциал ее дуги.
□ Параметрические
уравнения винтовой линии имеют вид
.
Согласно
условию задачи получим
![]()
,
т.к.
![]()
при
![]()
.
Дифференциал дуги
можно найти по формуле
=
![]()
.
Находим
![]()
,
![]()
,
![]()
.
Следовательно,
![]()
=
![]()
.
■
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Заказать задачи по любым предметам можно здесь от 10 минут
Производная функции по направлению
Как найти?
Постановка задачи
Найти производную функции $ u(x,y,z) $ в точке $ M (x_1,y_1,z_1) $ по направлению вектора $ overline{l} = (l_x,l_y,l_z) $
План решения
Если для функции $ u(x,y,z) $ существует производная в точке $ M(x_1,y_1,z_1) $, то значит в этой точке существует производная по любому направлению $ overline{l} $ и находится по формуле:
$$ frac{partial u}{partial l} = frac{partial u}{partial x} bigg |_M cdot cos alpha + frac{partial u}{partial y} bigg |_M cdot cos beta + frac{partial u}{partial z} bigg |_M cdot cos gamma $$
- Находим частные производные первого порядка:
$$ frac{partial u}{partial x}; frac{partial u}{partial y}; frac{partial u}{partial z} $$ - Вычисляем полученные производные в точке $ M(x_1,y_1,z_1) $:
$$ frac{partial u}{partial x} bigg |_{M(x_1,y_1,z_1)}; frac{partial u}{partial y} bigg |_{M(x_1,y_1,z_1)}; frac{partial u}{partial z} bigg |_{M(x_1,y_1,z_1)} $$ - Получаем направляющие косинусы по формулам:
$$ cos alpha = frac{l_x}{|overline{l}|}; cos beta = frac{l_y}{|overline{l}|}; cos gamma = frac{l_z}{|overline{l}|} $$ - Подставляем все полученные данные в формулу и записываем ответ
Примеры решений
| Пример 1 |
| Найти производную функции $ u = x+ln(z^2+y^2) $ в точке $ M (2,1,1) $ по направлению вектора $ overline{l} = (-2,1,-1) $ |
| Решение |
|
Находим частные производные первого порядка и вычисляем их начение в точке $ M $: $$ frac{partial u}{partial x} = 1; frac{partial u}{partial x} bigg |_{M(2,1,1)} = 1 $$ $$ frac{partial u}{partial y} = frac{2y}{z^2+y^2}; frac{partial u}{partial y} bigg |_{M(2,1,1)}=1 $$ $$ frac{partial u}{partial z} = frac{2z}{z^2+y^2}; frac{partial u}{partial z} bigg |_{M(2,1,1)} = 1 $$ Вычисляем направляющие косинусы: $$ cos alpha = frac{-2}{sqrt{(-2)^2+1^2+(-1)^2}} = frac{-2}{sqrt{6}} $$ $$ cos beta = frac{1}{sqrt{(-2)^2+1^2+(-1)^2}} = frac{1}{sqrt{6}} $$ $$ cos gamma = frac{-1}{sqrt{(-2)^2+1^2+(-1)^2}} = — frac{1}{sqrt{6}} $$ Подставляем полученные частные производные в точке $ M $ и направляющие косинусы в формулу: $$ frac{partial u}{partial l} = 1 cdot (-frac{2}{sqrt{6}}) + 1 cdot frac{1}{sqrt{6}} + 1 cdot (-frac{1}{sqrt{6}}) = -frac{2}{sqrt{6}} $$ Если не получается решить свою задачу, то присылайте её к нам. Мы предоставим подробное решение онлайн. Вы сможете ознакомиться с ходом вычисления и почерпнуть информацию. Это поможет своевременно получить зачёт у преподавателя! |
| Ответ |
| $$ frac{partial u}{partial l} = -frac{2}{sqrt{6}} $$ |
| Пример 2 |
| Найти производную $ u = xy — frac{x}{z} $ в точке $ M(-4,3,-1) $ по направлению вектора $ overline{l} = (5,1,-1) $ |
| Решение |
|
Берем частные производные первого порядка от функции в точке $ M(-4,3,-1) $: $$ frac{partial u}{partial x} = y — frac{1}{z}; frac{partial u}{partial x} bigg |_{M(-4,3,-1)} = 4 $$ $$ frac{partial u}{partial y} = x; frac{partial u}{partial y} bigg |_{M(-4,3,-1)} = -4 $$ $$ frac{partial u}{partial z} = frac{x}{z^2}; frac{partial u}{partial z} bigg |_{M(-4,3,-1)} = -4 $$ Вычисляем направляющие косинусы: $$ cos alpha = frac{5}{sqrt{5^2+1^2+(-1)^2}} = frac{5}{sqrt{27}} $$ $$ cos beta = frac{1}{sqrt{5^2+1^2+(-1)^2}} = frac{1}{sqrt{27}} $$ $$ cos gamma = frac{-1}{sqrt{5^2+1^2+(-1)^2}} = frac{-1}{sqrt{27}} $$ По формуле производной по направлению получаем ответ: $$ frac{partial u}{partial l} = 4 cdot frac{5}{sqrt{27}} + (-4) cdot frac{1}{sqrt{27}} + (-4) cdot frac{-1}{sqrt{27}} = frac{20}{sqrt{27}} $$ |
| Ответ |
| $$ frac{partial u}{partial l} = frac{20}{sqrt{27}} $$ |
Дифференцирование единичного вектора


Дифференцирование единичного вектора
- Вычислить производную единичного вектора по скалярному аргументу. В точечной кинематике скалярным аргументом обычно является время и расстояние вдоль пути. В качестве единичного вектора выберите m, ориентированный по касательной траектории, и рассчитайте его производную по времени. Производная dx / dr перпендикулярна единичному вектору m. Чтобы доказать это, используйте тождество t-t = l. Различая обе части этой идентичности по времени, 2-м = 0. PhD. Поскольку каждый фактор в этом уравнении не равен нулю, векторы di’dr и m перпендикулярны друг другу.
С помощью построения фазовой плоскости найдено периодическое движение системы, которое приводит к переходу в устойчивое состояние движения, зависящее от различных параметров и начальных условий движения. Людмила Фирмаль
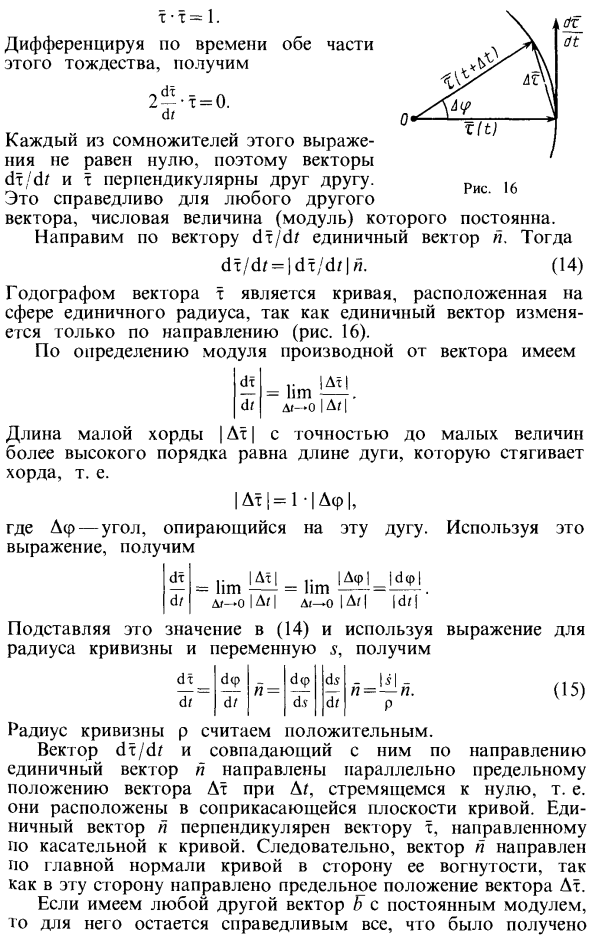
Это верно для всего остального Вектор с постоянным числовым значением (модулем). Получает единичный вектор n вдоль вектора dt / dr. Тогда dx / dz =] dx / dz | p. (14) Поскольку единичный вектор изменяется только в направлении, годограф вектора m представляет собой кривую на сфере единичного радиуса (рисунок 16). Определяя модуль векторных производных, «= лим. dr d (-. o | Dg | Длина шнура до небольшого значения старшего порядка, равного длине дуги, которая соединяет шнур, т. Е. | При | = 1 | НЧ | Где Af — угол этой дуги. Используйте это выражение, чтобы получить = Lim Lim. Доктор Д> -. о! Dg | A / —O IDGIIdrl.
- Подставляя это значение в (14), используя уравнение радиуса кривизны и переменную s, получим dtp n = dtp ds d7 d.v df. Радиус кривизны p считается положительным. Единичные векторы, которые соответствуют вектору dt / dr и направлению, ориентированы параллельно ограничивающему положению вектора Am, поскольку Ar стремится к нулю. То есть он размещен на изогнутой контактной поверхности. Единичный вектор n перпендикулярен вектору m, ориентированному по касательной кривой.
В результате ограниченное положение вектора Am ориентируется в этом направлении, поэтому вектор n ориентируется вдоль основной нормали кривой в направлении его вогнутой поверхности. Если существует другой вектор B с постоянным модулем, все, что получено для единичного вектора, является действительным, и только радиус годографа заменяется модулем b. получить (15 ‘) Где n — единичный вектор, ориентированный перпендикулярно вектору b и параллельно дБлдт.
Сила трения скольжения расположена на общей касательной плоскости контактной поверхности объекта и направлена в направлении, противоположном направлению возможного или фактического скольжения тела под действием приложенной силы. Людмила Фирмаль
Уравнение (15 ‘) можно выразить как векторное произведение: LBI df = ωx B, Где ω — вектор угловых скоростей вращения вектора B и его модуль ||> | = | dcp / d / |. Вектор угловой скорости ω должен быть ориентирован перпендикулярно плоскости, в которой расположены векторы b и n, и, используя эту стрелку, поворот вектора b к n в этой плоскости против часовой стрелки под углом 90 ° Должны видеть Понятие вектора угловой скорости более подробно показано при рассмотрении жесткого поворота деревни вокруг неподвижной оси и других случаях его движения.
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Вектор-функции
Предел и непрерывность вектор-функции.
Понятие вектор-функции.
Если каждому значению (tin E), где (Esubsetmathbb), поставлен в соответствие вектор (r(t)) трехмерного пространства, то говорят, что на множестве (E) задана векторная функция (r(t)) скалярного аргумента (t).
Пусть в пространстве фиксирована прямоугольная система координат (Oxyz). Тогда задание вектор-функции (r(t), tin E), означает задание координат (x(t), y(t), z(t)) вектора (r(t), tin E). Если (i,j,k) — единичные векторы координатных осей, то
$$
r(t)=x(t)i+y(t)j+z(t)k,qquad tin E,nonumber
$$
или
$$
r(t)=(x(t),y(t),z(t)).nonumber
$$
Если (z(t)=0) при всех (tin E), то вектор-функцию (r(t)) называют двумерной.
В случае, когда начало каждого из векторов (r(t)) совпадает с началом координат (рис. 21.1), эти векторы называют радиус-векторами, а множество их концов — годографом вектор-функции (r(t)), (tin E), который можно рассматривать как траекторию точки (M(t)) конца вектора (r(t)), если считать, что (t) — время.
Предел вектор-функции.
Вектор (a) называют пределом вектор-функции (r(t)) в точке (t_0) и пишут (displaystyle lim_>r(t)=a) или (r(t)rightarrow a) при (trightarrow t_0), если
$$
lim_> |r(t)-a|=0,label
$$
то есть длина вектора (r(t)-a) стремится к нулю при (trightarrow t_0).
Рис. 20.1
Если заданы (r(t)=(x(t),y(t),z(t))) и (a=(a_<1>,a_<2>,a_<3>)), то
$$
lim_>r(t)=alabel
$$
тогда и только тогда, когда
$$
x(t)rightarrow a_1, y(t)rightarrow a_2, z(t)rightarrow a_3quad при trightarrow t_0.label
$$
Поэтому, если (r(t)rightarrow a) при (trightarrow t_0), то есть выполняется условие eqref, то выполняется условие eqref.
Обратно: если выполняются условия eqref, то из равенства eqref следует, что выполнено условие eqref. (bullet)
При доказательстве свойств предела вектор-функции удобно использовать следующее очевидное утверждение: условие eqref выполняется в том и только том случае, когда
$$
r(t)=a+alpha(t),nonumber
$$
где (alpha(t)) — бесконечно малая вектор-функция, то есть
$$
alpha(t)rightarrow 0quad mbox <при> trightarrow t_<0>.nonumber
$$
Свойства пределов вектор-функций.
(circ) Это свойство следует из неравенства
$$
||r(t)|-|a|| leq |r(t)-a|.qquad bulletnonumber
$$
Если (r(t)rightarrow a) при (trightarrow t_<0>), а скалярная функция (f(t)) такова, что (f(t)rightarrow A) при (trightarrow t_<0>), то (f(t)r(t)rightarrow Aa) при (trightarrow t_<0>), то есть
$$
lim_f(t)r(t)=lim_>f(t)lim_r(t).label
$$
(circ) Из определений пределов скалярной функции и вектор-функции следует, что (r(t)=a+alpha(t), f(t)=A+beta(t)), где (alpha(t)) — бесконечно малая вектор-функция, (beta(t)) — бесконечно малая функция при (trightarrow t_0). Поэтому (f(t)r(t)=Aa+gamma(t)), где (gamma(t)=Aalpha(t)+beta(t)a+beta(t)alpha(t)) — бесконечно малая вектор-функция при (trightarrow t_0), откуда получаем равенство eqref. (bullet)
(circ) По условию (r_(t)=a_+alpha_), где (a_i(t)rightarrow 0) при (trightarrow t_<0> (i=1,2)). Поэтому (r_1(t)+r_2(t)=a_1+a_2+beta(t)), где (beta(t)=alpha_<1>(t)+alpha_2(t)rightarrow 0) при (trightarrow t_<0>), откуда следует eqref. Докажем формулу eqref. В силу свойств скалярного произведения
$$
(r_<1>(t),r_2(t))-(a_1,a_2)=(alpha_<1>(t),a_<2>)+(alpha_<2>(t),a_1)+(alpha_1(t),alpha_2(t)),nonumber
$$
причем в правой части этого равенства — бесконечно малая функция, так как (alpha_<1>(t),alpha_<2>(t)) — бесконечно малые вектор-функции и (|(p,q)| leq |p|cdot|q|) для любых векторов (p) и (q).
Аналогично доказывается формула eqref, в этом случае следует воспользоваться неравенством (|[p,q]| leq |p|cdot|q|). (bullet)
Непрерывность вектор-функции.
Вектор-функцию (r(t)) называют непрерывной при (t=t_<0>), если
$$
lim_>r(t)=r(t_0).label
$$
Непрерывность вектор-функции (r(t)=(x(t),y(t),z(t))) при (t=t_<0>) в силу эквивалентности условий eqref и eqref означает, что ее координаты (x(t),y(t),z(t)) непрерывны в точке (t_<0>).
Назовем вектор-функцию (Delta r=r((t_0+Delta t)-r(t_0)) приращением вектор-функции (r(t)) в точке (t_<0>). Тогда условие eqref означает, что
$$
Delta rrightarrow 0quad приquad Delta trightarrow 0.label
$$
Из определения непрерывности вектор-функции и свойств пределов векторных функций следует, что сумма, векторное и скалярное произведения вектор-функций (r_1(t)) и (r_2(t)) являются непрерывными функциями при (t=t_<0>), если вектор-функции (r_1(t)) и (r_2(t)) непрерывны в точке (t_<0>).
Производная и дифференциал вектор-функции.
Производная вектор-функции.
Если существует (displaystyle lim_<Delta trightarrow 0>frac<Delta r><Delta t>) где (Delta r=r(t_0+Delta t)-r(t_0)), то этот предел называют производной вектор-функции (r(t)) в точке (t_0) и обозначают (r'(t_0)) или (dot(t_0)).
Таким образом,
$$
r'(t_<0>)=lim_<Delta trightarrow 0>frac+Delta t)-r(t_<0>)><Delta t>.label
$$
Аналогично вводится понятие второй производной
$$
r″(t_<0>)=lim_<Delta trightarrow 0>frac+Delta t)-r'(t_<0>)><Delta t>nonumber
$$
и производной порядка (n > 2) вектор-функции. Заметим, что если (r(t)=(x(t),y(t),z(t))), то
$$
r'(t_<0>)=(x'(t_0),y'(t_0),z'(t_0))label
$$
Утверждение eqref следует из определения eqref и свойств пределов вектор-функций.
Аналогично, если существует (r″(t_<0>)), то
$$
r″(t_<0>)=(x″(t_0),y″(t_0),z″(t_0)).nonumber
$$
Из определения производной следует, что (Delta r=r'(t_0)Delta t+alpha(Delta t)Delta t), где (alpha(Delta t)rightarrow 0) при (Delta trightarrow 0), и потому (Delta rrightarrow 0) при (Delta trightarrow 0). Таким образом, выполняется условие eqref, то есть вектор-функция (r(t)), имеющая производную в точке (t_<0>), непрерывна при (t=t_<0>).
(circ) Формулы eqref-eqref справедливы в точке (t), если в этой точке соответствующие функции имеют производные. Ограничимся доказательством формулы eqref. Пусть (Delta r_) — приращение вектор-функции (r_k(t)), соответствующее приращению аргумента (Delta t), то есть (Delta r_k=r_k(t+Delta t)-r_k(t), k=1,2). Тогда, используя свойства скалярного произведения и свойства пределов вектор-функций, получаем
$$
begin
(r_<1>,r_<2>)’=displaystylelim_<Delta trightarrow 0>frac<(r_<1>(t+Delta t),r_<2>(t+Delta t))-(r_<1>(t),r_<2>(t))><Delta t>=\
=lim_<Delta trightarrow 0>left[left(r_<1>(t),frac<Delta r_<2>(t)><Delta t>right)+left(frac<Delta r_<1>(t)><Delta t>,r_2(t)right)+left(frac<Delta r_<1>(t)><Delta t>,Delta r_2(t)right)right]=\
=(r_1,r_2′)+(r_1′,r_2),
endnonumber
$$
так как (displaystyle frac<triangle mathrm_><triangle t>rightarrow r_‘(t)) при (Delta trightarrow 0 (i=1,2)) и (Delta r_2rightarrow 0) при (Delta trightarrow 0). (bullet)
Пусть существует (r'(t)) для всех (tin(alpha,beta)) и пусть (|r(t)|=C=const) для всех (tin(alpha,beta)).
Доказать, что ((r(t),r'(t))=0), то есть векторы (r(t)) и (r'(t)) ортогональны.
(triangle) Используя формулу (|r(t)|^2=(r(t),r(t))), правило дифференцирования скалярного произведения (формула eqref) и условие (|r(t)|=C), получаем ((r(t),r(t))’=2(r'(t),r(t))=0), так как (|r(t)|^<2>)’=(C^<2>)’=0). Итак,
$$
|r(t)|=CRightarrow (r(t),r'(t))=0.quadblacktrianglenonumber
$$
Дифференциал вектор-функции.
Вектор-функцию (r(t)), определенную в некоторой окрестности точки (t_<0>), называют дифференцируемой при (t=t_<0>), если ее приращение (Delta r=r(t_<0>+Delta t)-r(t_<0>)) в точке (t_<0>) представляется в виде
$$
Delta r=aDelta t+Delta talpha(Delta t),label
$$
где вектор (a) не зависит от (Delta t), (alpha(Delta t)rightarrow 0) при (Delta trightarrow 0).
Полагая (dt=Delta t), запишем равенство eqref в виде
$$
dr=r’dt,nonumber
$$
где опущено обозначение аргумента функции (r’). Отсюда получаем
$$
r’=frac
$$
Замена переменного.
Если функция (t=t(s)) дифференцируема при (s=s_<0>, t(s_<0>)=t_<0>), а вектор-функция (r(t)) дифференцируема в точке (t_<0>), то вектор-функция (rho(s)=r(t(s))) дифференцируема в точке (s_<0>), а производная этой функции выражается формулой
$$
rho’ (s_0)=r_s'(t(s_0))=r_'(t_<0>)t_‘(s_<0>),label
$$
где индекс указывает, по какому переменному производится дифференцирование.
(circ) Функция (alpha(Delta(t))) в формуле eqref не определена при (Delta t=0). Доопределим ее при (Delta t=0), полагая (alpha(0)=0).
Так как (t=t(s)) — функция, дифференцируемая при (s=s_0), то (Delta t=t(s_<0>+Delta s)-t(s_<0>)rightarrow 0) при (Delta srightarrow 0). Разделив обе части равенства eqref на (Delta sneq 0), получим
$$
frac<Delta r><Delta s>=r'(t_0)frac<Delta t><Delta s>+alpha(Delta t)frac<Delta t><Delta s>.label
$$
Правая часть eqref имеет при (Delta srightarrow 0) предел, равный (r'(t_0)t'(s_0)), так как (Delta trightarrow 0) при (Delta srightarrow 0) и (alpha(Delta t)rightarrow 0) при (Delta trightarrow 0). Следовательно, существует предел в левом части eqref, и справедливо равенство eqref. Формулу eqref запишем кратко в виде равенства
$$
r_’=r_’t_’,label
$$
выражающего правило дифференцирования вектор-функции при замене переменного. (bullet)
Теорема Лагранжа и локальная формула Тейлора для вектор-функции.
Формула Лагранжа, то есть формула
$$
r(beta)-r(alpha)=r'(xi)(beta-alpha),quad xiin(alpha,beta),label
$$
для вектор-функции, вообще говоря, неверна.
(circ) В самом деле, пусть формула eqref верна, и пусть (r(t)=(cos t,sin t)), тогда (r'(t)=(-sin t,cos t), |r'(t)|=1). Полагая (alpha=0,beta=2pi), получим из равенства eqref (0=r(2pi)-r(0)=r'(xi)2pi), что невозможно, так как (|r'(xi)|=1). (bullet)
Если вектор-функция (r(t)) непрерывна на отрезке ([alpha,beta]) и дифференцируема на интервале ((alpha,beta)), то
$$
existsxiin(alpha,beta): |r(beta)-r(alpha)|leq|r'(xi)|(beta-alpha).label
$$
(circ) Рассмотрим скалярную функцию
$$
varphi(t)=(r(beta)-r(alpha),r(t)).nonumber
$$
эта функция непрерывна на отрезке ([alpha,beta]), так как вектор-функция (r(t)) непрерывна на этом отрезке. Кроме этого, функция (varphi(t)) дифференцируема на интервале ((alpha,beta)), так как функция (r(t)) дифференцируема этом интервале, причем в силу правила дифференцирования скалярного произведения
$$
varphi'(t)=(r(beta)-r(alpha),r'(t)).nonumber
$$
По теореме Лагранжа
$$
existsxiin(alpha,beta): varphi(beta)-varphi(alpha)=varphi'(xi)(beta-alpha)label
$$
Преобразуем левую часть неравенства eqref:
$$
begin
varphi(beta)-varphi(alpha)=(r(beta)-r(alpha),r(beta))-(r(beta)-r(alpha),r(alpha))=\
=(r(beta)-r(alpha),r(beta)-r(alpha))=|r(beta)-r(alpha)|^2
endnonumber
$$
Тогда равенство eqref примет вид
$$
|r(beta)-r(alpha)|^<2>=(r(beta)-r(alpha),r'(xi))(beta-alpha).label
$$
Если (r(beta)=r(alpha)), то неравенство eqref справедливо при любом (xiin in(alpha,beta)). Если (r(beta)neq r(alpha)), то (|r(beta)-r(alpha)| > 0). Тогда, используя неравенство (|(a,b)|leq|a|cdot|b|), из формулы eqref получим
$$
|r(beta)-r(alpha)|^<2>leq|r(beta)-r(alpha)|cdot |r'(xi)|(beta-alpha),nonumber
$$
откуда, разделив обе части неравенства на (|r(beta)-r(alpha)| > 0), получим неравенство eqref. (bullet)
Для вектор-функции (r(t)) справедлива локальная формула Тейлора
$$
r(t)=sum_^frac(t_<0>)>(t-t_<0>)^+varepsilon(t-t_<0>),label
$$
где (varepsilon(t-t_0)=o((t-t_<0>)^)) — вектор-функция такая, что (varepsilon(t-t_0)=(t-t_<0>)^varepsilon_<1>(t-t_<0>)), где (varepsilon_<1>(t-t_<0>)rightarrow 0) при (trightarrow t_<0>).Эта формула справедлива в предположении, что существует (r^<(n)>(t_0)). Для доказательства формулы eqref достаточно воспользоваться локальной формулой Тейлора для компонент вектор-функции (r(t)).
Векторное дифференцирование
В дальнейшем в различных главах будет использовано векторное дифференцирование, которое позволяет использовать более компактную и наглядную запись. Поэтому в этом параграфе кратко рассмотрим определения и свойства векторного дифференцирования (символ *= f обозначает равенство по определению).
1) Производная вектора х = (х Х2 . хп) Т по скаляру t:
2) Производная скалярной функции 5 = s (х) по вектору х = = (х Х2 . хп) Т :
3) Производная векторной функции f (х) (f = (Д . /п) т ) по вектору х = (si Х2 . хп) Т :
Используя приведенные определения и обычные правила дифференцирования, можно получить следующие правила векторного дифференцирования.
1°. Производная скалярного произведения по скаляру t:
Если у = х, то имеем
2°. Производная произведения матрицы и вектора по скаляру t:
А — (т х п)-матрица, зависящая от t.
3°. Производная скалярного произведения по вектору х =
Если у = z, то имеем
4°. Производная квадратичной формы по вектору х = = (Xj Х2 • • • &п) •
Q — симметрическг^я (тг х п)-матрица, не зависящей от х.
5°. Производная сложной векторной функции по скаляру t:
http://univerlib.com/mathematical_analysis/derivative/vector_functions/
http://studme.org/270187/tehnika/vektornoe_differentsirovanie
Производная функции в точке в направлении вектора
Пример №1. Дана функция z=z(x,y), точка A(x0,y0) и вектор a. Найти:
1) grad z в точке A; 2) производную данной функции в точке A в направлении вектора a.
z=5x²*y+3xy²
Решение получаем, решая через калькулятор.
Градиентом функции z = f(x,y) называется вектор, координатами которого являются частные производные данной функции, т.е.:
Находим частные производные:
Тогда величина градиента равна:
grad(z)=(10xy+3y²)i+(5x²+6xy)j
Найдем градиент в точке А(1;1): grad(z)A=(10·1·1+3·1²)i+(5·1²+6·1·1)j или grad(z)A=13i+11j
Модуль grad(z):

Направление вектора-градиента задаётся его направляющими косинусами:

Найдем производную в точке А по направлению вектора а(6;-8).
Найти направление вектора — значит найти его направляющие косинусы:

Модуль вектора |a| равен:
тогда направляющие косинусы:
Для вектора a имеем:
Если ∂z/∂a > 0, то заданная функция в направлении вектора a возрастает.
Если ∂z/∂a < 0, то заданная функция в направлении вектора a убывает.
Пример №2. Даны z=f(x; y), А(х0, у0).
Найти а) градиент функции z=f(x; y) в точке А.
б) производную в точке А по направлению вектора а.
Пример №3. Найти полный дифференциал функции, градиент и производную вдоль вектора l(1;2).
z = ln(sqrt(x^2+y^2))+2^x
Решение.
Градиентом функции z = f(x,y) называется вектор, координатами которого являются частные производные данной функции, т.е.:
Находим частные производные:
Тогда величина градиента равна:
Найдем производную в точке А по направлению вектора а(1;2).
Найти направление вектора — значит найти его направляющие косинусы:
Модуль вектора |a| равен:
тогда направляющие косинусы:
Для вектора a имеем:
Если ∂z/∂a > 0, то заданная функция в направлении вектора a возрастает.
Если ∂z/∂a < 0, то заданная функция в направлении вектора a убывает.
Пример №4. Дана функция ![]() . Найти:
. Найти:
1) gradu в точке A(5; 3; 0);
2) производную в точке А в направлении вектора a=i-2j+k.
Решение.
1. .
Найдем частные производные функции u в точке А.
![]() ;;
;;
, ![]() .
.
Тогда ![]()
2. Производную по направлению вектора a в точке А находим по формуле
Частные производные в точке А нами уже найдены. Для того чтобы найти cos α, cos β, cos γ, найдем единичный вектор a0 вектора a.
, где ![]() .
.
Отсюда ![]()
Пример №5. Даны функция z=f(x), точка А(х0, у0) и вектор a. Найти: 1) grad z в точке А; 2) производную в точке А по направлению вектора a.
Решение.
Находим частные производные:
Тогда величина градиента равна:
Найдем градиент в точке А(1;1)
или
Модуль grad(z):
Направление вектора-градиента задаётся его направляющими косинусами:
Найдем производную в точке А по направлению вектора а(2;-5).
Найти направление вектора — значит найти его направляющие косинусы:
Модуль вектора |a| равен:
тогда направляющие косинусы:
Для вектора a имеем:
Поскольку ∂z/∂a < 0, то заданная функция в направлении вектора a убывает.
Перейти к онлайн решению своей задачи