iSopromat.ru

Пример решения задачи по определению траектории равноускоренного движения точки, заданного уравнениями, скорости и ускорения в некоторые моменты времени, координаты начального положения точки, а также путь, пройденный точкой за время t.
Задача

где x и y – в см, а t – в с. Определить траекторию движения точки, скорость и ускорение в моменты времени t0=0 с, t1=1 с и t2=5 с, а также путь, пройденный точкой за 5 с.
Решение
Расчет траектории
Определяем траекторию точки. Умножаем первое заданное уравнение на 3, второе – на (-4), а затем складываем их левые и правые части:
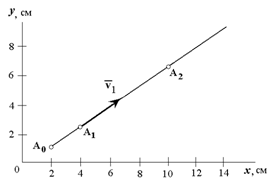
Получилось уравнение первой степени – уравнение прямой линии, значит движение точки – прямолинейное (рисунок 1.5).

Для того, чтобы определить координаты начального положения точки A0, подставим в заданные уравнения значения t0=0; из первого уравнения получим x0=2 см, из второго y0=1 см. При любом другом значении t координаты x и y движущейся точки только возрастают, поэтому траекторией точки служит полупрямая 3x-4y=2 с началом в точке A0 (2; 1).
Расчет скорости

Расчет ускорения
Определяем ускорение точки. Его проекции на оси координат:

Проекции ускорения не зависят от времени движения,

т.е. движение точки равноускоренное, векторы скорости и ускорения совпадают с траекторией точки и направлены вдоль нее.
С другой стороны, поскольку движение точки прямолинейное, то модуль ускорения можно определить путем непосредственного дифференцирования уравнения скорости:
Определение пути
Определяем путь, пройденный точкой за первые 5с движения. Выразим путь как функцию времени:
Проинтегрируем последнее выражение:

Если t=t0=0, то C=s0; в данном случае s0=0, поэтому s=2,5t 2 . Находим, что за 5с точка проходит расстояние
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Уравнение траектории тела — определение и формулы
Общие сведения
Под движением тела понимают процесс его перемещения из одной точки пространства в другую. Произошедшее действие исследуют относительно другого объекта или выбранных начальных координат. При этом положение вовсе не обязательно может изменяться сразу ко всем окружающим его телам. Например, стоящий человек на Земле находится в состоянии покоя по отношению к планете, но движется относительно Солнца.
В физике принято любое изменение определять в системе пространственных координат. За оси принимают перпендикулярные линии x, y, z. Совокупность данных, используемых для изучения движения, называют системой отсчёта.
Существует несколько видов механического перемещения (во времени) физической точки:
- равномерное и равноускоренно прямолинейное;
- по дуге;
- гармоническое колебание.
При движении тело проходит определённый путь. Описать его можно виртуальной линией, при этом она может быть как прямой, так и кривой. Именно она и называется траекторией движения. По сути, эта линия соединяет последовательно все положения точки в пространстве — от начальной до конечной. Длина отрезка является пройденным путём и считается векторной величиной.
Изменение радиус-вектора r (значения, задающего положение точки в пространстве относительно другого тела) описывает кинематический закон: r = r (t). В трёхмерных декартовых координатах его можно записать так: r = xe + ye + ze = (x, y, z). Вектор, построенный из начальной точки движущегося тела в расположение её в данный момент времени, то есть приращение радиус-вектора за определённый промежуток t, как раз и называют перемещением.
Результирующее движение же равно векторной сумме последовательных изменений положения. При прямолинейном перемещении вектор пути совпадает с соответствующим участком траектории, а модуль перестановки равняется пройденному расстоянию.
Время, за которое тело пройдёт по установленной траектории пути, называют скоростью. Фактически это быстрота изменения координаты. Физики, исследуя передвижение, изучают не только положение материальной точки в начальный и конечный момент времени, но и закон, по которому происходит перемещение. Другими словами, они определяют зависимость радиус-вектора от времени.
Горизонтальное перемещение
Пусть имеется тело, брошенное горизонтально поверхности. Высота падения равняется h, а начальная скорость V0. Здесь систему отсчёта удобно связать с Землёй. Объект будет передвигаться под действием силы тяжести. Остальными силами, например, сопротивлением воздуха, можно пренебречь. Тело перемещается в плоскости, содержащей вектора ускорения и свободного падения (g).
Таким образом, система начальных условий будет выглядеть так: x (t = 0) = 0; y (t = 0) = 0; v0x = v0; voy = 0. Вектор ускорения постоянный, поэтому a = g. Если тело представить как совокупность материальных точек, движущихся по одинаковому пути, то путь можно определить как сумму перемещений по прямым. Уравнение скорости примет вид: v (t) = v0 + gt. Об изменении положения можно сказать, что оно выполняется с постоянной скоростью и ускорением в горизонтальной плоскости, являясь равномерным. Значит, проекцию на оси ординаты и абсциссы можно записать как vx = v0; vy = -gt.
Скорость перемещения рассчитывают по формуле: V = √(V 2 x + V 2 y). После подстановки полученных ранее выражений равенство примет вид: V = √(V 2 0 + g 2 t 2 ). Отсюда следует, что уравнение для вектора движения материальной точки будет: s (t) = s0 + V0t + (g t 2 ) / 2, где: s0 — смещение тела, соответствующее начальному моменту времени.
Так как s0 = y (t = 0) = h0, то скалярные выражения для координат изменяющей положение частицы можно представить в виде системы: x = V0t; y = h0 — (gt 2 / 2). Перемещение происходит по прямой как отдельное движение в двух плоскостях, при этом из формулы следует, что изменение положения будет соответствовать правой половине направленной вниз параболы. Учитывая то, что время можно определить из отношения икса к начальной скорости (t = x /V0), можно записать окончательную формулу для вычисления траектории движения тела: y = h0 — (gx 2 ) / (2 2 V0) .
Можно сделать вывод, что уравнение траектории не записывается через время, поэтому частица будет и перемещаться обратно по той же самой траектории. Временные отрезки между точками пути будут одинаковы как при прямом, так и при обратном движении.
Каждому положению соответствует определённое значение скорости, которое не зависит от направления перемещения. Нужно отметить, что наибольшей величиной в горизонтальной траектории полёта будет начальная точка.
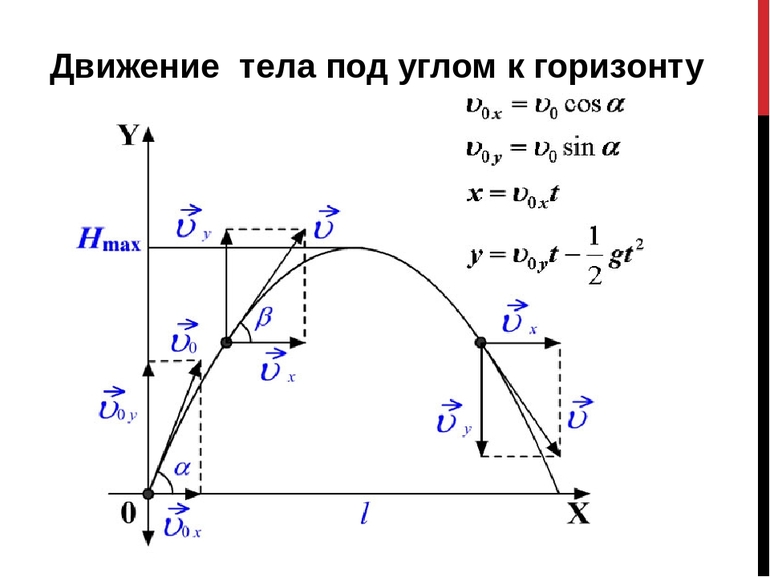
Движение тела под углом
Свободное падение является частным случаем равноускоренного, то есть на перемещаемый объект действует только сила притяжения. Если физическая точка перемещается, то кривая, которая описывается её радиус-вектором, обозначает пройденный путь. Эту траекторию можно описать некоторой математической функцией.
Итак, вектор скорости точки определяется как производная по времени: V = dr / dt = r. Ускорение же можно найти, продифференцировав скорость: a = dV / dt = d 2 r / dt. Если обозначить производную времени точкой, то формулу можно переписать так: a = V = r.
Для того чтобы вывести формулу, нужно воспользоваться основными выражениями, определяющими проекции:
- ускорения: ax = 0, ay = — g, az = 0;
- радиус-вектора: rx (t) = V0 * cosat, ry (t) = v * sin (at — (g * t2)/2)), rz (t) = 0;
- скорости: vx (t) = V0 * cosa, vy (t) = V0 * sin (a — gt), vz (t) = 0.
Чтобы запись зависимости вертикальной оси от горизонтальной была как можно более компактной, соответствующие координаты rx и ry можно обозначить через икс и игрек. Из уравнения, связывающего координатную ось X и время, можно определить t как функцию ординаты. Линейное выражение будет иметь вид: t = x / (Vo * cosa).
Если полученную формулу для времени подставить в уравнение для игрек координаты, то вместо временного параметра появится икс. То есть можно будет вывести зависимость абсциссы от ординаты: y = V 0 * sinat — (g * t 2 ) / 2 = (tga) * x — (g / 2 * V0 * cos 2 a) * x 2 . Значение t нужно подставить в каждое слагаемое, но при этом учесть, что отношение синуса к косинусу называют тангенсом. Альфа в формуле — это угол между направлением начальной скорости и горизонтальным направлением (угол броска). После исключения времени из этих уравнений получим уравнение траектории.
В итоге останется два слагаемых. Первое будет линейно по иксу, а второе квадратично. Таким образом, зависимость игрека от икса в уравнении траектории — это парабола (справа стоит квадратичная функция). Она проходит через начало координат. Если верно равенство x = 0, то игрек тоже будет равняться нулю.
Следует обратить внимание на то, что в квадрате стоит отрицательный коэффициент. Известно, что если перед квадратичным слагаемым в уравнении параболы стоит отрицательное число, то концы кривой будут направлены вниз.
Решение задач
Решение практических заданий лучше всего помогает закрепить полученные знания. Существуют физические сборники, которые интересны тем, что включают в себя различные примеры, приближенные к реалистичным задачам. Прорешивая их самостоятельно, ученик не только лучше разберётся в теме, но и научится применять полученные знания на практике.
Вот два таких задания:

- Пусть имеется тело, движение которого описывается равенствами: x = Vx * t; y = y0 + Vy * t. Нужно определить траекторию его перемещения, учитывая, что Vx = 20 см/с, Vy = 2 м/с, Yo = 0,2 м. Для решения задачи нужно записать систему, определяемую исходными данными. Затем из первого равенства выразить время: t = x / Vx. Полученную формулу можно подставить в выражение нахождения координат абсциссы: y = y0 + (Vy * x) / Vx. Если теперь использовать исходные данные, то уравнение, описывающее траекторию, примет вид: y = 0.2 + 4x. Равенство напоминает собой формулу прямой: y = k * x + b. Исходя из этого можно утверждать, что траектория пути также будет представлять собой прямую линию. Действительно, в этом можно убедиться, если построить график движения. Для этого нужно взять несколько произвольных значений для икса, подставить их в формулу и найти вторую координату.
- Следующая задача довольно интересная. Нужно составить траекторию движения для тела, движущегося равномерно со скоростью два метра в секунду, при отклонении пути от оси икс на 60 градусов. За начало координат нужно принять точку (0, 0). Тогда начальный радиус-вектор тоже будет равен нулю: R = 0. Для успешного решения примера понадобится вспомнить скалярные уравнения для проекции при равномерном движении. Так как по условию вектор задан, то можно найти его проекцию на ось игрек: Vx = v * cos60 = 1; Vy = v * cos30 = √3. Отсюда: x = Vx * t = t; y = Vy * t = √3t.
Таким образом, чтобы успешно решать задачи, нужно знать несколько основных формул для определения местоположения тела, а также то, как выглядят уравнения параболы и прямой.
Стоит отметить, что существующие онлайн-калькуляторы не умеют вычислять формулы, описывающие траекторию пути. Но вместе с тем их можно использовать для выполнения расчётов или как справочники.
Траектория движения
Определение и основные понятия траектории движения
Во многих задачах интерес представлю не только перемещения материальных точек в пространстве, но и траектории их движения.
Линию, которую описывает частица при своем движении, называется траекторией движения.
В зависимости от формы траектории механическое движение можно разделить на:
- прямолинейное движение, траекторией движения точки в этом случае является прямая линия;
- и криволинейное перемещение (траектория — кривая линия).
Форма траектории зависит от выбора системы отсчета. В разных системах отсчета траектории могут быть представлены разными линиями, могут быть прямыми и кривыми.
При движении точки с постоянным ускорением, которое описывает уравнение:
Уравнение траектории движения
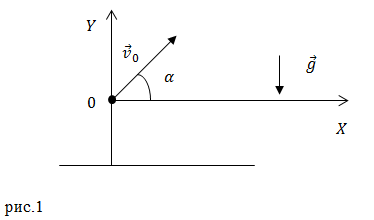
Рассмотрим свободное движение тела около поверхности Земли. Начало координат разместим в точке бросания тела (рис.1). Оси координат направим так, как изображено на рис.1.
Тогда уравнение движения тела (1) в проекциях на координатные оси декартовой системы координат принимает вид системы из двух уравнений:
Для того чтобы получить уравнение траектории движения тела ($y=y(x)$) следует исключить время движения тела из уравнений (2) и (3). Выразим из уравнения (2) $t$ и подставим его в выражение (3), получим:
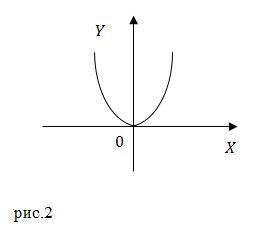
Выражение (4) это уравнение параболы, проходящей через начало координат. Ее верви направлены вниз, так как коэффициент при $x^2$ меньше нуля.
Вершина этой параболы находится в точке с координатами:
Найти координаты вершины траектории можно при помощи известных правил исследования функций на экстремум. Так, положение максимума функции $y(x)$ определяют, приравнивая к нулю первую производную ($frac$) от нее по $x$.
Обратимость движения
Из представления о траектории можно конкретизировать смысл обратимости механического движения.
Пусть частица движется в силовом поле таком, что ее ускорение в любой точке обладает определенной величиной, не зависящей от скорости. Как будет двигаться эта частица, если, в какой то точке ее траектории направление скорости заменить противоположным? С точки зрения математики это эквивалентно замене $t $ на $-t$ для всех уравнений. Уравнение траектории время не содержит, получается, что частица будет перемещаться «вспять» по той же самой траектории. При этом отрезки времени между любыми точками траектории будут одинаковы при прямом и обратном движении. Всякой точке траектории ставится в соответствие определенное значение величины скорости независимо от направления движения по данной траектории. Данные свойства наглядны в колебательных движениях маятника.
Все сказанное выше справедливо тогда, когда можно пренебречь любым сопротивлением движению. Обратимость движения существует, когда выполняется закон сохранения механической энергии.
Параметры траектории движения
Положение точек системы отсчета можно определять при помощи разных способов. В соответствии с этими способами описывают и движение точки или тела:
- Координатная форма описания движения. Выбирается система координат, в ней положение точки характеризуют тремя координатами (в трехмерном пространстве). Это могут быть координаты $x_1=x,x_2=y,x_3=z$, в декартовой системе координат. $x_1=rho ,x_2=varphi ,x_3= z$ в цилиндрической системе и т.д. При перемещении точки координаты являются функциями времени. Описать движение точки — это значит указать эти функции: [x_1=x_1left(tright);; x_2=x_2left(tright);; x_3=x_3left(tright)left(6right).]
- При описании движения в векторной форме положение материальной точки задает радиус-вектор ($overline$) по отношению к точке, которую принимают начальной. В этом случае вводят точку (тело) отсчета. При перемещении точки вектор $overline$ постоянно изменяется. Конец этого вектора описывает траекторию. Движение задает выражение: [overline=overlineleft(tright)left(7right).]
- Третьим способом описания движения является описание с помощью параметров траектории.
Путь — это скалярная величина, равная длине траектории.
Если траектория задана, то задачу описания движения сводят к определению закона движения вдоль нее. При этом выбирается начальная точка траектории. Любая другая точка характеризуется расстоянием $s$ по траектории от начальной точки. В таком случае движение описывают выражением:
Пусть по окружности радиуса R равномерно перемещается точка. Закон движения точки по окружности в рассматриваемом методе запишем как:
где $s$ — путь точки по траектории; $t$ — время движения; $A$ — коэффициент пропорциональности. Известными являются окружность и точка начала движения. Отсчет положительных величин $s$ совпадает с направлением перемещения точки по траектории.
Знание траектории движения тела во многих случаях существенно упрощает процесс описания движения тела.
Примеры задач с решением
Задание: Точка движется в плоскости XOY из начала координат со скоростью $overline=Aoverline+Bxoverline , $где $overline$, $overline$ — орты осей X и Y; $A$,B — постоянные величины. Запишите уравнение траектории движения точки ($y(x)$). Изобразите траекторию. textit<>
Решение: Рассмотрим уравнение изменения скорости частицы:
Из этого уравнения следует, что:
Для получения уравнения траектории следует решить дифференциальное уравнение (1.3):
Мы получили уравнение параболы, ветви которой направлены вверх. Эта парабола проходит через начало координат. Минимум этой функции находится в точке с координатами:
Задание: Движение материальной точки в плоскости описывает система уравнений: $left< begin x=At. \ y=At(1+Bt) end right.$, где $A$ и $B$ — положительные постоянные. Запишите уравнение траектории точки.
Решение: Рассмотрим систему уравнений, которая задана в условии задачи:
Исключим время из уравнений системы. Для этого из первого уравнения системы выразим время, получим:
Подставим вместо $t$ правую (2.2) часть во второе уравнение системы (2.1), имеем:
http://nauka.club/fizika/formula-uravneniya-traektorii-tela-dvizhushchegosya-pod-uglom.html
http://www.webmath.ru/poleznoe/fizika/fizika_95_traektorija_dvizhenija.php
Содержание:
- Определение и формула пути
- Виды движения и формулы длины пути
- Единицы измерения пути
- Примеры решения задач
Определение и формула пути
Линия, которую описывает материальная точка при своем движении, называется траекторией.
Определение
Длиной пути называют сумму длин всех участков траектории, которые прошла точка за рассматриваемый промежуток времени
от t1 до t2.
В том случае, если уравнения движения представлены в прямоугольной декартовой системе координат, то длина пути (s) определяется как:
$$s=int_{t_{1}}^{t_{2}} sqrt{left(frac{d x}{d t}right)^{2}+left(frac{d y}{d t}right)^{2}+left(frac{d z}{d t}right)^{2}} d t=int_{t_{1}}^{t_{2}} sqrt{(dot{x})^{2}+(dot{y})^{2}+(dot{z})^{2}} d t(1)$$
В цилиндрических координатах длина пути может быть выражена как:
$$s=int_{t_{1}}^{t_{2}} sqrt{left(frac{d rho}{d t}right)^{2}+left(rho frac{d varphi}{d t}right)^{2}+left(frac{d z}{d t}right)^{2}} d t=int_{t_{1}}^{t_{2}} sqrt{(dot{rho})^{2}+(rho dot{varphi})^{2}+(dot{z})^{2}} d t(2)$$
В сферических координатах формулу длины пути запишем:
$$s=int_{t_{1}}^{t_{2}} sqrt{left(frac{d r}{d t}right)^{2}+left(r frac{d theta}{d t}right)^{2}+left(r sin theta frac{d varphi}{d t}right)^{2}} d t=int_{t_{1}}^{t_{2}} sqrt{(dot{r})^{2}+(r dot{theta})^{2}+(r varphi sin theta)^{2}} d t(3)$$
Местоположение перемещающейся материальной точки в фиксированный момент времени, например t=t1 называют начальным положением.
Очень часто полагают t1=0. Длин пути, который прошла материальная точка из начального положения – скалярная функция времени: s=s(t).
Считают, что за промежуток времени $d t rightarrow 0$ материальная точка проходит путь ds,
который называют элементарным. При этом:
$$d s=|d bar{r}|=v d t$$
где $bar{r}$ – вектор элементарного перемещения материальной точки, v – модуль скорости ее движения.
Виды движения и формулы длины пути
Длина пути при равномерном движении (v=const) точки равна:
$$s=vleft(t_{2}-t_{1}right)(5)$$
где t1 – начало отсчета движения, t2 – окончание отсчета. Формула (5) показывает то, что длина пути, который проходит равномерно движущаяся материальная точка – это линейная функция времени.
Если движение не является равномерным, то можно длину пути
$Delta s$ на отрезке времени от
$t$ до
$t + Delta t$ находят как:
$$Delta s=langle vrangle Delta t(6)$$
где $langle vrangle$ – средняя путевая скорость. При равномерном движении
$langle vrangle = v$ .
Путь, который проходит материальная тоска при равнопеременном движении (a=const)вычисляют как:
$$s=v_{0} t+frac{a t^{2}}{2}(7)$$
где a – постоянное ускорение, v0 – начальная скорость движения.
Единицы измерения пути
Основной единицей измерения пути в системе СИ является: [s]=м
В СГС: [s]=см
Примеры решения задач
Пример
Задание. Траектория движения материальной точки изображена на рис. 1. Каков путь, пройденный точкой,
чему равно перемещение, если точка двигалась 1-2-3-4.
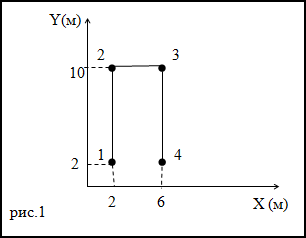
Решение. Перемещение – кратчайшее расстояние между точками 1 и 4. Следовательно, перемещение точки равно:
$$6 — 2 = 4 (m)$$
Путь – длина траектории. Рассматривая график на рис.1 получаем, что путь материальной точки равен:
$$8 + 4 + 8 = 20 (m)$$
Ответ. Путь равен 20 м, перемещение равно 4 м.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Пример
Задание. Уравнение движения материальной точки в прямоугольной декартовой системе координат представлено функцией:
x=-0,2t2 (м) . Какой путь пройдет материальная точка за 5 с?
Решение. Так как уравнение движения задано только одной координатой, то в качестве основы для решения
задачи примем формулу пути в виде:
$$s=int_{t_{1}}^{t_{2}} sqrt{(dot{x})^{2}} d t(2.1)$$
Подставим в (2.1) функцию x=-0,2t2, учтем, что $0 c leq t leq 5 c$ имеем:
$$s=int_{0}^{5} sqrt{left(-0,2 frac{dleft(t^{2}right)}{d t}right)^{2}} d t=0,left.4 cdot frac{t^{2}}{2}right|_{0} ^{5}=5(m)$$
Ответ. s=5м.
Читать дальше: Формула равноускоренного движения.
Пример решения задачи по определению траектории равноускоренного движения точки, заданного уравнениями, скорости и ускорения в некоторые моменты времени, координаты начального положения точки, а также путь, пройденный точкой за время t.
Задача
Движение точки A задано уравнениями:
где x и y – в см, а t – в с. Определить траекторию движения точки, скорость и ускорение в моменты времени t0=0 с, t1=1 с и t2=5 с, а также путь, пройденный точкой за 5 с.
Другие примеры решений >
Помощь с решением задач >
Решение
Расчет траектории
Определяем траекторию точки. Умножаем первое заданное уравнение на 3, второе – на (-4), а затем складываем их левые и правые части:
Получилось уравнение первой степени – уравнение прямой линии, значит движение точки – прямолинейное (рисунок 1.5).
Другие видео
Для того, чтобы определить координаты начального положения точки A0, подставим в заданные уравнения значения t0=0; из первого уравнения получим x0=2 см, из второго y0=1 см.
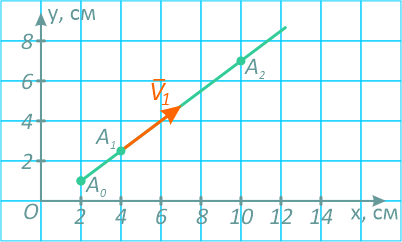
Рисунок 1.5
При любом другом значении t координаты x и y движущейся точки только возрастают, поэтому траекторией точки служит полупрямая 3x-4y=2 с началом в точке A0 (2; 1).
Расчет скорости
Определяем скорость движения точки, найдя сначала ее проекции на оси координат:
тогда

При t0=0с скорость точки v0=0, при t1=1с – v1=5 см/с, при t2=5с – v2=25см/с.
Расчет ускорения
Определяем ускорение точки. Его проекции на оси координат:
Проекции ускорения не зависят от времени движения,
![]()
т.е. движение точки равноускоренное, векторы скорости и ускорения совпадают с траекторией точки и направлены вдоль нее.
С другой стороны, поскольку движение точки прямолинейное, то модуль ускорения можно определить путем непосредственного дифференцирования уравнения скорости:
Определение пути
Определяем путь, пройденный точкой за первые 5с движения. Выразим путь как функцию времени:
Проинтегрируем последнее выражение:
Если t=t0=0, то C=s0; в данном случае s0=0, поэтому s=2,5t2. Находим, что за 5с точка проходит расстояние s|t=5с=2,5∙52=62,5 см.
Другие примеры решения задач >
Сохранить или поделиться с друзьями
Вы находитесь тут:
На нашем сайте Вы можете получить решение задач и онлайн помощь
Подробнее

Основные кинематические параметры
Траектория
Линию, которую очерчивает материальная точка при движении в пространстве, называют траекторией.
Траектория может быть прямой и кривой, плоской и пространственной линией.
Уравнение траектории при плоском движении:  .
.
Пройденный путь
Путь измеряется вдоль траектории в направлении движения. Обозначение —  , единицы измерения — метры.
, единицы измерения — метры.
Уравнение движения точки
Уравнение, определяющее положение движущейся точки в зависимости от времени, называется уравнением движения.
Положение точки в каждый момент времени можно определить по расстоянию, пройденному вдоль траектории от некоторой неподвижной точки, рассматриваемой как начало отсчета (рис. 9.1). Такой способ задания движения называется естественным.
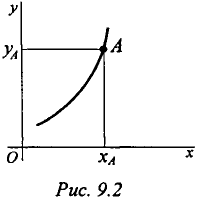
Таким образом, уравнение движения можно представить в виде  . Положение точки можно также определить, если известны ее координаты в зависимости от времени (рис. 9.2). Тогда в случае движения на плоскости должны быть заданы два уравнения:
. Положение точки можно также определить, если известны ее координаты в зависимости от времени (рис. 9.2). Тогда в случае движения на плоскости должны быть заданы два уравнения:
В случае пространственного движения добавляется и третья координата  .
.
Такой способ задания движения называют координатным.
Скорость движения
Векторная величина, характеризующая в данный момент быстроту и направление движения по траектории, называется скоростью.
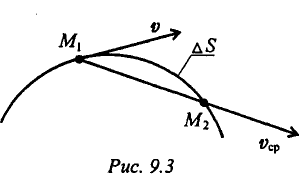
Скорость — вектор, в любой момент направленный по касательной к траектории в сторону направления движения (рис. 9.3).
Если точка за равные промежутки времени проходит равные расстояния, то движение называют равномерным.
Средняя скорость на пути  определяется как
определяется как
где — пройденный путь за время  — промежуток времени.
— промежуток времени.
Если точка за равные промежутки времени проходит неравные ‘пути, то движение называют неравномерным.
В этом случае скорость — величина переменная и зависит от времени  .
.
При рассмотрении малых промежутков времени  средняя скорость становится равной истинной скорости движения в данный момент. Поэтому скорость в данный момент определяют как производную пути по времени:
средняя скорость становится равной истинной скорости движения в данный момент. Поэтому скорость в данный момент определяют как производную пути по времени:

За единицу скорости принимают 1м/с. Иногда скорость измеряют в км/ч, 
Ускорение точки
Векторная величина, характеризующая быстроту изменения скорости по величине и направлению, называется ускорением точки.
Скорость точки при перемещении из точки  в точку
в точку  меняется по величине и направлению. Среднее значение ускорения за этот промежуток времени
меняется по величине и направлению. Среднее значение ускорения за этот промежуток времени
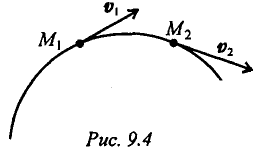
При рассмотрении бесконечно малого промежутка времени среднее ускорение превратится в ускорение в данный момент:

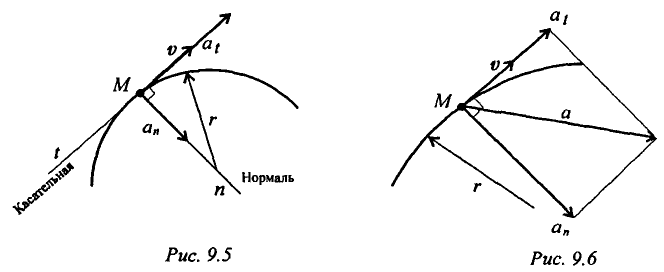
Обычно для удобства рассматривают две взаимно перпендикулярные составляющие ускорения: нормальное и касательное (рис. 9.5).
Нормальное ускорение  характеризует изменение скорости по направлению и определяется как
характеризует изменение скорости по направлению и определяется как

где  — радиус кривизны траектории в данный момент времени.
— радиус кривизны траектории в данный момент времени.
Нормальное ускорение всегда направлено перпендикулярно скорости к центру дуги.
Касательное ускорение at характеризует изменение скорости по величине и всегда направлено по касательной к траектории; при ускорении его направление совпадает с направлением скорости, при замедлении оно направлено противоположно направлению вектора скорости.
Формула для определения касательного ускорения имеет вид:
Значение полного ускорения определяется как  (рис. 9.6).
(рис. 9.6).
Эта теория взята со страницы решения задач по предмету «техническая механика»:
Примеры решения задач технической механике
Возможно эти страницы вам будут полезны:

§6. Примеры движения тела. Методы решения задач.
Рассмотрим некоторые характерные примеры движения тела, знание которых будет полезно при дальнейшем изучении физики.
1.Равномерное прямолинейное движение тела.
При равномерном прямолинейном движении тело совершает равные перемещения `Delta vecr` за одинаковые промежутки времени `Delta t`. Иными словами, скорость `vec v` тела не зависит от времени и остаётся постоянной в процессе движения:
При этом зависимость `vec r(t)` имеет вид:
`vec r(t)=vec r_0+vec v t`, (7)
где `vec r_0` — радиус-вектор тела в начальный момент времени $$ t=0$$ . В этой связи вспомним замечание о начальных условиях, сделанное в §4. Вектор $$ {overrightarrow{r}}_{0}$$ здесь является тем начальным условием, которое позволяет однозначно определить радиус-вектор $$ overrightarrow{r}$$ тела в любой момент времени в процессе движения.
Векторное уравнение (7) равносильно системе двух скалярных уравнений, выражающих зависимость от времени $$ t $$ координат $$ x$$ и $$ y$$ движущегося тела:
| $$ left{begin{array}{l}xleft(tright)={x}_{0}+{v}_{x}left(tright),\ yleft(tright)={y}_{0}+{v}_{y}left(tright)·end{array}right.$$ | (8) |
где $$ {x}_{0}$$ и $$ {y}_{0}$$ — начальные координаты тела в момент времени $$ t=0$$, а $$ {v}_{x}$$ и $$ {v}_{y}$$ -проекции вектора скорости `vecv` на координатные оси $$ Ox$$ и $$ Oy$$ соответственно.
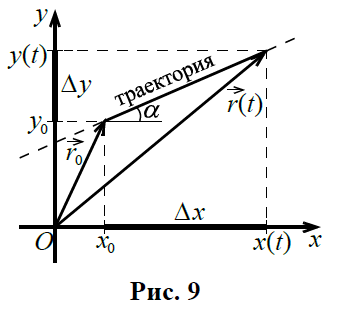
Траектория равномерного прямолинейного движения тела графически представляет собой отрезок прямой линии (рис. 9), тангенс угла наклона которой к оси абсцисс равен отношению проекций скорости на оси координат: $$ mathrm{tg}alpha ={v}_{y}/{v}_{x}$$. Аналитическое уравнение траектории, т. е. зависимость $$ yleft(xright)$$, легко получить, исключив параметр $$ t$$ из системы уравнений (8):
`y(x)=(v_y)/(v_x)(x-x_0)+y_0`. (9)
Равномерное прямолинейное движение тела на плоскости $$ xOy$$ описывается уравнениями: $$ xleft(tright)=6+3t$$, $$ yleft(tright)=4t$$ (величины измерены в СИ). Запишите уравнение траектории тела. Изобразите графически зависимость модуля вектора скорости от времени $$ vleft(tright)$$. Определите путь, пройденный телом в течение первых пяти секунд движения.
Сравнивая уравнения движения, представленные в условии задачи, с системой уравнений (8), находим:
$$ {x}_{0}=6$$ м, $$ {y}_{0}=0$$ , $$ {v}_{x} =3$$ м/c, $$ {v}_{y} =4$$ м/c.
Уравнение траектории получим, подставив эти значения в общее уравнение (9):
`y(x) =4/3(x — 6)`, или `y(x) = 4/3 x — 8`.
Модуль $$ v$$ скорости тела определим, зная $$ {v}_{x}$$ и $$ {v}_{y}$$:
`v=sqrt(v_x^2+v_y^2)=5` м/с.
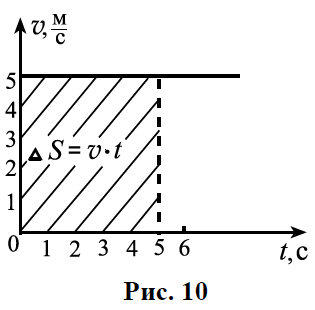
График зависимости $$ vleft(tright)$$ представлен на рис. 10. При равномерном прямолинейном движении пройденный путь `Delta S` численно равен модулю вектора `Delta vec r` перемещения тела. Вектор `Deltavec r` для такого движения найдём из уравнения (7): `Deltavec r = vec r (t) — vec r_0 = vec vt`. Его модуль равен: `Delta r = vt`. Таким образом, при равномерном движении путь, пройденный телом в течение времени `t`, определяется по формуле `Delta S = vt`, т. е. численно равен площади прямоугольника под графиком зависимости $$ vleft(tright)$$ . Этот вывод можно обобщить и на случай неравномерного движения.
В нашем примере путь равен площади прямоугольника, заштрихованного на рис. 10:
`Delta S = vt = 5 «м»/»c»*5 «c» = 25 «м»`.
Используя рассуждения аналогичные Примеру 3, несложно показать, что пусть численно равен площади фигуры под графиком скорости при любом произвольном движении материальной точки.
Координаты тела при равномерном прямолинейном движении на плоскости $$ xOy $$ за время $$ t=2$$ c изменились от начальных значений $$ {x}_{0}=5$$ м, $$ {y}_{0}=7$$ м до значений $$ x=-3$$ м и $$ y=1$$ м. Найдите модуль скорости тела. Запишите уравнение траектории тела. Изобразите графически траекторию тела и направление вектора его скорости. Постройте графики зависимости координат тела от времени.
Проекции скорости на оси координат можно найти с помощью уравнений движения (8) и численных данных задачи:
`v_x=(x-x_0)/t=(-3-5)/2=-4` м/с, `v_y=(y-y_0)/t=(1-7)/2=-3` м/с.
Тогда модуль скорости `v=sqrt(v_x^2+v_y^2)=5` м/с.
Уравнение траектории $$ yleft(xright)$$ с учётом (9) и численных данных задачи имеет вид:
$$ yleft(xright)={displaystyle frac{3}{4}}(x-5)+7$$, или $$ yleft(xright)={displaystyle frac{3}{4}}x+{displaystyle frac{13}{4}}$$.
Положение тела в начальный и конечный моменты времени (точки `A` и `B`), его траектория и направление скорости изображены на рис. 11. Зависимость координат тела от времени легко найти аналитически, подставляя начальные условия и значения $$ {v}_{x}$$ и $$ {v}_{y}$$ в общие уравнения движения (8):
$$ xleft(tright)=5-4t,yleft(tright)=7-3t$$.
Графически эти зависимости представлены в виде отрезков прямых на рис. 12.
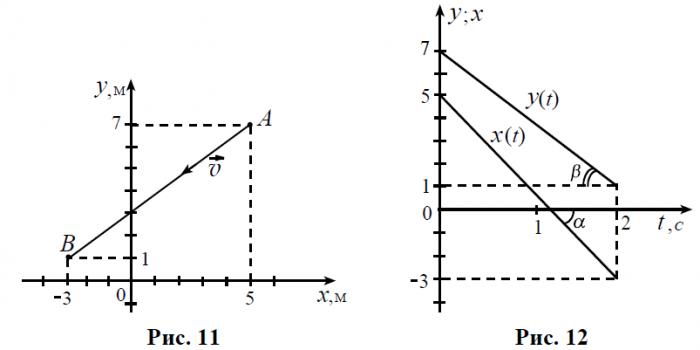
Заметим, что тангенсы углов наклона отрезков прямых на рис. 12 численно равны коэффициентам при $$ t$$ в соответствующих уравнениях $$ xleft(tright)$$ и $$ yleft(tright)$$, т. е. значениям $$ {v}_{x}$$ и $$ {v}_{y}$$:
`»tg»alpha=-4`, `»tg»beta=-3`.
(Т. к. в данном случае графики уравнений движения представляют собой убывающие функции, то здесь тангесы отрицательны.)
2. Неравномерное движение тела.
Для неравномерного движения характерно то, что с течением времени изменяется скорость движущегося тела, а в общем случае и его ускорение. В качестве примера может служить движение, при котором тело проходит различные участки своего пути с разной скоростью. Такое движение принято характеризовать, прежде всего, средней путевой скоростью. Причём прилагательное «путевая» в условиях задач часто опускается.
Любитель бега трусцой пробежал половину пути со скоростью $$ {v}_{1}=10$$ км/ч. Затем половину оставшегося времени бежал со скоростью $$ {v}_{2}=8$$ км/ч, а потом до конца пути шёл пешком со скоростью $$ {v}_{3}=4$$ км/ч. Определить среднюю скорость движения бегуна.
Из смысла условия задачи следует, что здесь речь идёт о средней путевой скорости. Разобьём весь путь `Delta S` на три участка `Delta S_1`, `Delta S_2` и `Delta S_3`. Время движения на каждом участке обозначим соответственно `Delta t_1`, `Delta t_2`, `Delta t_3`. Средняя скорость бегуна согласно определению, выраженному формулой (3), будет равна:
`v_»cp»= (Delta S_1 +Delta S_2+Delta S_3)/(Delta t_1+Delta t_2+Delta t_3)`.
По условию задачи `Delta S_1 =DeltaS // 2`, `Delta S_2 + Delta S_3 = Delta S //2`. Поскольку `Delta S_1 = v_1Delta t_1`, `Delta S_2 = v_2Delta t_2`, `Delta S_3 = v_3Delta t_3` и, учитывая, что `Delta t_2 = Delta t_3`, найдём время движения на отдельных участках:
`Delta t_1=(Delta S_1)/(v_1)=(Delta S)/(2v_1)`,
`Delta t_2=(Delta S_2)/(v_2)=(Delta S)/(2(v_2+v_3))`,
`Delta t_3=(Delta S_3)/(v_3)=(Delta S)/(2(v_2+v_3))`.
Подставляя эти значения в выражение для `v_»ср»`, получим:
`v_»cp»=(Delta S)/((Delta S)/(2v_1)+(Delta S)/(2(v_2+v_3))+(Delta S)/(2(v_2+v_3))) =(2v_1(v_2+v_3))/(2v_1+v_2+v_3)=7,5` км/ч.
Заметим, что иногда учащиеся подсчитывают среднюю путевую скорость движения по формуле `v_»ср»= (v_1 + v_2 + … + v_n)//n`, где `v_i` — скорость движения на `i`-м участке, `n` — число участков пути. Аналогично поступают и с вектором средней скорости `v_»ср»`. Следует иметь в виду, что такой расчёт в общем случае является ошибочным.
Другим характерным примером неравномерного движения служит так называемое равнопеременное движение, которое целесообразно рассмотреть подробно, не выходя при этом за рамки школьной программы.
3. Равнопеременное движение.
Равнопеременным называется такое неравномерное движение, при котором скорость `vec v` за любые равные промежутки времени `Delta t` изменяется на одинаковую величину `Deltavecv`. В этом случае ускорение `veca` тела не зависит от времени и остаётся постоянным в процессе движения:
(при этом `vec v != «const»`, и траектория движения не обязательно прямолинейная).
При равнопеременном движении скорость $$ overrightarrow{v}$$ тела изменяется с течением времени по закону
`vec v (t)=vec v_0 +vec at`, (11)
где `vecv_0` — скорость тела в начальный момент времени `t=0`.
В свою очередь, зависимость `vecr(t)` имеет вид:
`vec r(t)=vec r_0+vec v_0t+(vec a t^2)/2`, (12)
где `vecr_0` — начальный радиус-вектор тела при `t=0`. Вновь заметим, что величины `vecv_0` и `vecr_0` представляют собой начальные условия, позволяющие в любой момент времени однозначно определить векторы `vecv` и `vecr`.
При координатном способе описания равнопеременного движения векторным уравнениям (11) и (12), равносильны следующие системы уравнений для проекций скорости и радиус-вектора тела на оси выбранной системы отсчёта. Здесь мы ограничиваемся случаем плоского движения, при котором траектория тела лежит в одной плоскости, совпадающей с координатной:
| $$ left{begin{array}{l}{v}_{x}left(tright)={v}_{0x}+{a}_{x}t,\ {v}_{y}left(tright)={v}_{0y}+{a}_{y}t.end{array}right.$$ | (13) |
| $$ left{begin{array}{l}xleft(tright)={x}_{0}+{v}_{0x}t+{displaystyle frac{{a}_{x}{t}^{2}}{2}},\ yleft(tright)={y}_{0}+{v}_{0y}t+{displaystyle frac{{a}_{y}{t}^{2}}{2}},end{array}right.$$ | (14) |
где $$ {x}_{0}$$ и $$ {y}_{0}$$ — начальные абсцисса и ордината тела (при $$ t=0$$), $$ {v}_{0x}$$ и $$ {v}_{0y}$$ — проекции начальной скорости `vecv_0` тела на координатные оси, $$ {a}_{x}$$ и $$ {a}_{y}$$ — проекции вектора ускорения на оси $$ Ox$$ и $$ Oy$$ соответственно.
В принципе формулы (11) и (12), или равносильные им системы уравнений (13) и (14) позволяют решить любую задачу на движение тела с постоянным ускорением.
В случае прямолинейного движения тела удобнее одну координатную ось, например ось $$ Ox$$, совместить с траекторией тела. Тогда для описания движения будет достаточно одной этой оси, в проекциях на которую векторные уравнения (11) и (12) дают:
$$ {v}_{x}={v}_{0x}+{a}_{x}t$$, $$ x={x}_{0}+{v}_{0x}t+{displaystyle frac{{a}_{x}{t}^{2}}{2}}$$.
Если на промежутке времени от $$ 0$$ до $$ t$$ направление движения тела не изменялось на противоположное, то разность $$ x-{x}_{0}$$текущей и начальной координат тела совпадает с пройденным путём $$ S$$, следовательно,
`S=v_(0x)t+(a_xt^2)/2`.
Эту формулу можно записать по-другому, если подставить в неё время $$ t$$, выраженное из уравнения $$ {v}_{x}={v}_{0x}+{a}_{x}t$$ . Это время будет
`t=(v_x-v_(0x))/a_x`.
Тогда для пути $$ S$$ после несложных преобразований получим
`S=(v_x^2-v_(0x)^2)/(2a_x)`.
Удобство этой формулы заключается в том, что она не содержит времени $$ t$$ в явном виде. Вместе с тем надо помнить, что формула получена в предположении о неизменности направления движения тела.
За `2`c прямолинейного равноускоренного движения тело прошло `20` м, увеличив свою скорость в `3` раза. Определите конечную скорость тела. (ЕГЭ, 2005г., уровень .B )
Пусть за время $$ t=2$$ с скорость тела изменилась от $$ {v}_{0}$$ до $$ v$$. Направим координатную ось $$ Ox$$ вдоль траектории тела в сторону движения. Тогда в проекциях на эту ось можно записать `v=v_0+at`, `a` — модуль ускорения тела. По условию `v_0=1/3v` и, следовательно, `a=2/3v/t`.
За время $$ t$$ тело, движущееся с таким ускорением, пройдёт путь
`S=(v^2-v_0^2)/(2a)`.
С учётом выражений для $$ {v}_{0}$$ и $$ a$$ получим `S=2/3vt`. Откуда искомая скорость `v=3/2S/t`. Подставляя сюда значения `S = 20` м и `t =2` c, найдём окончательно `v =15` м/ с.
Одним из наиболее наглядных примеров равнопеременного движения является движение тела в поле тяжести Земли, которое мы имеем возможность наблюдать повседневно. Для решения задач в этом случае надо заменить в приведённых выше формулах вектор $$ overrightarrow{a}$$ на ускорение свободного падения $$ overrightarrow{g}$$, сообщаемое силой гравитационного притяжения всякому телу, движущемуся в поле тяжести Земли. Рассмотрим три конкретных случая такого движения.
Движение тела, брошенного вертикально.
Тело бросили с поверхности земли, сообщив ему начальную скорость $$ {overrightarrow{v}}_{0}$$ направленную вертикально вверх. Пренебрегая сопротивлением воздуха, определите время $$ tau $$ полёта тела до момента падения на землю; скорость тела в момент падения; максимальную высоту $$ H$$ подъёма тела над землёй; время $$ {tau }_{1}$$ подъёма тела на максимальную высоту; путь `S`, пройденный телом за время полёта и перемещение тела. Начертите графики зависимости от времени $$ t$$ вертикальной координаты тела и проекции на вертикальную ось его скорости в процессе полёта.
Поскольку движение полностью происходит в вертикальном направлении, то для определения пространственного положения тела достаточно одной координатной оси $$ Oy$$. Направим её вертикально вверх, начало отсчёта $$ O$$ поместим в точку бросания (рис. 13). Начальные условия движения тела: $$ {y}_{0}=0,{v}_{0y}={v}_{0}$$.
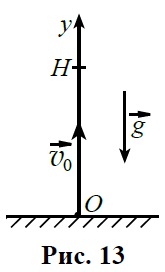
Проекция ускорения тела на ось $$ Oy$$ в отсутствие сопротивления воздуха равна $$ {a}_{y}=-g$$ , т. к. вектор $$ overrightarrow{g}$$ направлен вертикально вниз противоположно направлению координатной оси. Вторые уравнения систем (13) и (14) с учётом начальных условий имеют вид:
Пусть при $$ t=tau $$ тело упало на землю. В этот момент $$ y=0$$ и уравнение (16) даёт: `0=v_0 tau-(g t^2)/2`. Откуда для $$ tau $$ получаем: $$ tau =0$$ или `tau=(2v_0)/g`. Значение $$ tau =0$$ соответствует начальному моменту бросания тела с поверхности земли, и для нас интереса не представляет. Следовательно, время полёта тела `tau=(2v_0)/g`.
Согласно (15), при $$ t=tau $$ имеем: $$ {v}_{y}={v}_{0}-gt$$. Тогда с учётом найденного значения $$ tau $$ получим $$ {v}_{y}={v}_{0}-2{v}_{0}=-{v}_{0}$$. Таким образом, скорость тела в момент падения равна по величине начальной скорости $$ {v}_{0}$$, но направлена вертикально вниз, её проекция на ось $$ Oy$$ отрицательна.
Пусть при $$ t={tau }_{1}$$ тело находится в наивысшей точке подъёма. Это значит, что $$ y=H,{v}_{y}=0$$. С учётом этих значений уравнения (15) и (16) дают:
`0=v_0-g tau_1`, `H=v_0 tau_1-(g tau_1^2)/2`.
Из первого уравнения определяем время подъёма тела `tau_1=(v_0)/g` и, подставляя $$ {tau }_{1}$$ во второе уравнение, найдём `H=(v_0^2)/(2g)`.
Заметим, что время $$ {tau }_{1}$$ подъёма тела на максимальную высоту вдвое меньше времени $$ tau $$ полёта тела: $$ tau =2{tau }_{1}$$.
Путь $$ S$$, пройденный телом за время полёта, складывается из двух участков: подъёма до высшей точки траектории и падения с высшей точки траектории на поверхность земли. Очевидно, что длины траекторий движения тела на этих участках одинаковы и, значит, $$ S=2H$$. Перемещение тела равно нулю, поскольку начальная и конечная точки траектории тела совпадают.
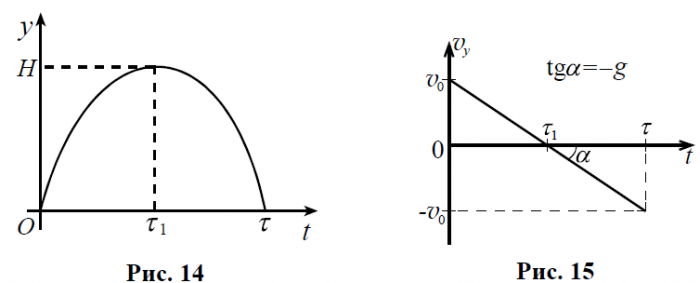
Зависимость $$ yleft(tright)$$ в соответствии с (16) представляет собой квадратичную функцию, графиком которой, как известно, является парабола (рис. 14). Ветви параболы направлены вниз, т. к. в формуле (16) коэффициент при `t^2` отрицателен.
Зависимость $$ {v}_{y}left(tright)$$ является линейной, и её график представляет собой отрезок прямой линии (рис. 15), тангенс угла наклона которой коси абсцисс равен коэффициенту при $$ t$$ в формуле (15):
`»tg»alpha=-g`.
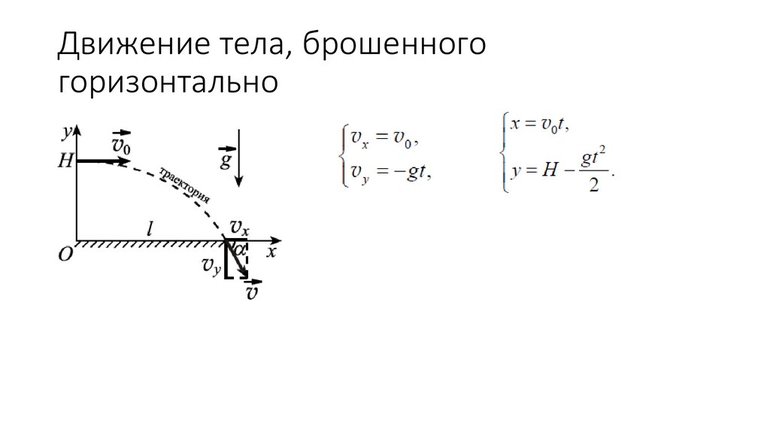
Движение тела, брошенного горизонтально.
Тело бросили с высоты $$ H$$ над поверхностью земли, сообщив ему начальную скорость $$ {overrightarrow{v}}_{0}$$, направленную горизонтально (рис. 16). Пренебрегая сопротивлением воздуха, определите время $$ tau $$ полёта тела до его падения на землю, дальность $$ l$$ полёта тела, скорость `vecv` тела в момент падения. Выбрав прямоугольную систему координат так, как показано на рис. 16, запишите уравнение траектории движения тела, начертите графики зависимости от времени $$ t$$ координат тела и проекций скорости тела на координатные оси.
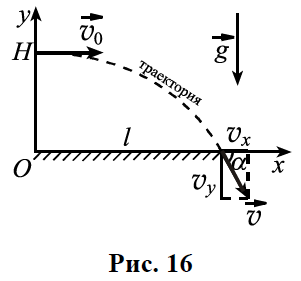
Начало отсчёта $$ O$$ поместим на поверхности земли под точкой бросания (рис. 16). Начальные условия движения тела: `x_0=0`, `y_0=H`, `v_(0x)=v_0`, `v_(0y)=0`. Проекции ускорения тела на оси координат при отсутствии сопротивления воздуха равны:
`a_x=0`, `a_y=-g`.
Запишем системы уравнений (13) и (14) с учётом этих значений:
| $$ left{begin{array}{l}{v}_{x}={v}_{0},\ {v}_{y}=-gt·end{array}right.$$ | (17) |
| $$ left{begin{array}{l}x={v}_{0}t,\ y=H-{displaystyle frac{g{t}^{2}}{2}}·end{array}right.$$ | (18) |
Пусть при $$ t=tau $$ тело упало на землю. Это означает, что $$ y=0$$, $$ x=l$$, и уравнения системы (18) принимают вид:
$$ l={v}_{0}tau $$, `0=H-(g tau^2)/2`.
Решая их ,находим:
`tau= sqrt((2H)/g)`, `l=v_0sqrt((2H)/g)`.
В свою очередь, система уравнений (17) даёт: $$ {v}_{x}={v}_{0},{v}_{y}=-gtau $$. С учётом значения $$ tau $$ получим `v_y=-sqrt(2gH)`, и модуль скорости `vecv` будет равен:
`v=sqrt(v_x^2+v_y^2)=sqrt(v_0^2+2gH)`.
Направление вектора `vecv` определим с помощью угла $$ alpha $$ (рис. 16):
`»tg»alpha=v_y//v_x=(-sqrt(2gH))//v_0`.
Уравнение $$ yleft(xright)$$ траектории движения тела получим, исключив параметр $$ t$$ из системы (18):
`y(x)=-g/(2v_0^2)x^2+H`.
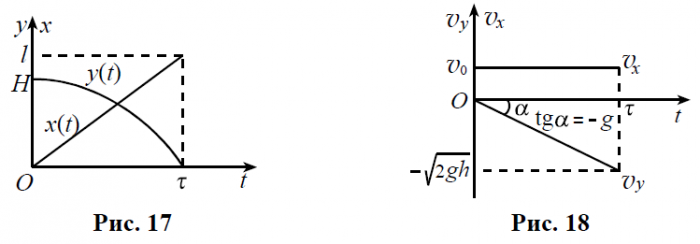
Так как $$ yleft(xright)$$ представляет собой квадратичную функцию, то траекторией движения тела является участок параболы с вершиной в точке бросания. Ветви параболы направлены вниз. Графики, требуемые в условии данного примера, представлены соответственно на рис. 17 и рис. 18.
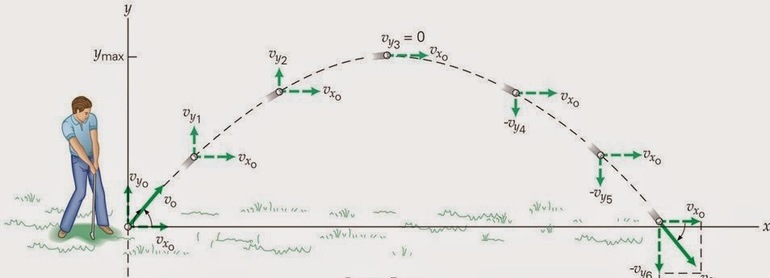
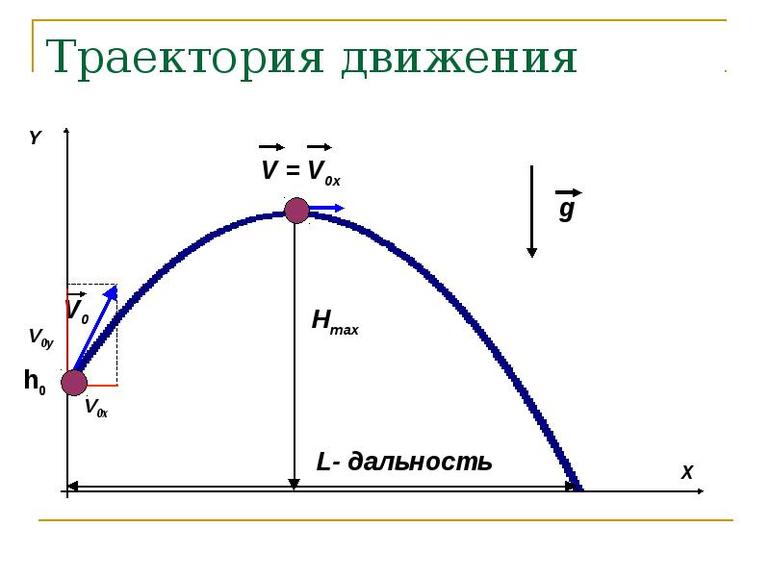
Движение тела, брошенного под углом к горизонту.
Тело бросили с поверхности земли с начальной скоростью $$ {v}_{0}$$ направленной под углом $$ alpha $$ к горизонту (рис. 19). Пренебрегая сопротивлением воздуха, определите время $$ tau $$ полёта тела до его падения на землю,дальность $$ l$$ полёта тела, скорость тела в момент падения на землю,максимальную высоту $$ H$$ подъёма тела над землёй, время $$ {tau }_{1}$$ подъёма тела на максимальную высоту. Запишите уравнение траектории тела.
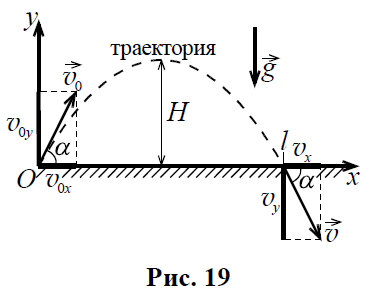
Направим оси прямоугольной системы координат, как показано на рис. 19. Начало отсчёта $$ O$$ поместим в точку бросания. Тогда начальные условия движения тела таковы: `x_0=0`, `y_0=0`, `v_(0x)=v_0cosalpha`, `v_(0y)=v_0sinalpha`. При отсутствии сопротивления воздуха $$ {a}_{x}=0,{a}_{y}=g$$ С учётом этих значений системы уравнений (13) и (14) имеют вид:
| $$ left{begin{array}{l}{v}_{x}={v}_{0}mathrm{cos}alpha ,\ {v}_{y}={v}_{0}mathrm{sin}alpha -gt·end{array}right.$$ | (19) |
| $$ left{begin{array}{l}x=left({v}_{0}mathrm{cos}alpha right)t,\ y=left({v}_{0}mathrm{sin}alpha right)t-{displaystyle frac{g{t}^{2}}{2}}·end{array}right.$$ | (20) |
Пусть при $$ t=tau $$ тело упало на землю, тогда: $$ y=0,x=l$$. Уравнения системы (20) дают:
$$ l=left({v}_{0}mathrm{cos}alpha right)tau $$, $$ 0=left({v}_{0}mathrm{sin}alpha right)tau -{displaystyle frac{g{tau }^{2}}{2}}$$.
Откуда находим
$$ tau ={displaystyle frac{2{v}_{0}mathrm{sin}alpha }{g}}$$, $$ l={displaystyle frac{{v}_{0}^{2}text{sin}2alpha }{g}}$$.
(Здесь использовано равенство $$ 2mathrm{sin}alpha mathrm{cos}alpha =mathrm{sin}2alpha .$$ )
Из полученного выражения для $$ l$$ легко определить угол $$ alpha $$, при котором дальность полёта тела будет максимальной. Действительно, величина $$ l$$ как функция от $$ alpha $$ принимает максимальное значение в том случае, когда $$ mathrm{sin}2alpha =1$$. Это возможно, если `2alpha=90^@`, т. е. `alpha=45^@`.
Модуль скорости тела в момент падения на землю определим с помощью теоремы Пифагора: `v=sqrt(v_x^2+v_y^2)`. В соответствии с системой уравнений (19) в этот момент (при $$ t=tau $$ ) имеем: $$ {v}_{x}={v}_{0}mathrm{cos}alpha $$, $$ {v}_{y}={v}_{0}mathrm{sin}alpha -gtau =-{v}_{0}mathrm{sin}alpha $$.
Следовательно, $$ v=sqrt{{v}_{0}^{2}{mathrm{cos}}^{2}alpha +{v}_{0}^{2}{mathrm{sin}}^{2}alpha }={v}_{0}$$, (так как $$ {mathrm{cos}}^{2}alpha +{mathrm{sin}}^{2}alpha =1$$).
Направление скорости тела в момент падения составляет угол $$ alpha $$ с направлением оси $$ Ox$$. Этот угол отсчитывается по часовой стрелке от направления оси $$ Ox$$.
Пусть при $$ t={tau }_{1}$$ тело достигло максимальной высоты. В этот момент $$ {v}_{y}=0$$, `y=H`. Соответствующие уравнения систем (19) и (20) дают:
$$ 0={v}_{0}mathrm{sin}alpha -g{tau }_{1}$$, $$ H=left({v}_{0}mathrm{sin}alpha right){tau }_{1}-{displaystyle frac{g{tau }_{1}^{2}}{2}}$$.
Отсюда последовательно находим:
$$ {tau }_{1}={displaystyle frac{{v}_{0}mathrm{sin}alpha }{g}}$$, $$ H={displaystyle frac{{v}_{0}^{2}{mathrm{sin}}^{2}alpha }{2g}}$$.
Видим,что $$ tau =2{tau }_{1}$$.
Уравнение траектории получим, исключив из системы (20) время $$ t$$ :
$$ yleft(xright)={displaystyle frac{g}{2{v}_{0}^{2}{mathrm{cos}}^{2}alpha }}{x}^{2}+mathrm{tg}alpha x$$.
График траектории тела представляетсобой участок параболы, ветви которой направлены вниз.