Количество повторений каких-либо событий или их возникновения за одну единицу таймера называется частотой. Это физическая величина измеряется в герцах – Гц (Hz). Она обозначается буквами ν, f, F, и есть отношение количества повторяющихся событий к промежутку времени, в течение которого они произошли.

При обращении предмета вокруг своего центра можно говорить о такой физической величине, как частота вращения, формула:
ν = N/t,
где:
- N – количество оборотов вокруг оси или по окружности,
- t – время, за которое они были совершены.
В системе СИ обозначается как – с-1 (s-1) и именуется как обороты в секунду (об/с). Применяют и другие единицы вращения. При описании вращения планет вокруг Солнца говорят об оборотах в часах. Юпитер делает одно вращение в 9,92 часа, тогда как Земля и Луна оборачиваются за 24 часа.
Что такое вращение?

Под ним в физике понимают такое перемещение материальной точки вокруг некоторой оси, при котором ее расстояние до этой оси остается постоянным. Оно называется радиусом вращения.
Примерами этого движения в природе является вращение планет вокруг Солнца и вокруг собственной оси. В технике вращение представлено движением валов, шестеренок, колеса автомобиля или велосипеда, перемещением лопастей ветровых мельниц.
Описывающие вращение физические величины

Для численного описания вращения в физике был введен ряд характеристик. Перечислим их и охарактеризуем.
В первую очередь это угол поворота, обозначается θ. Поскольку полная окружность характеризуется центральным углом в 2*pi радиан, то, зная величину θ, на которую повернулось вращающееся тело за определенный промежуток времени, можно определить число оборотов за это время. Кроме того, угол θ позволяет рассчитать линейный путь, пройденный телом вдоль кривой окружности. Соответствующие формулы для числа оборотов n и пройденного пути L имеют вид:
Где r — радиус окружности или радиус вращения.
Следующей характеристикой рассматриваемого типа движения является угловая скорость. Ее обычно обозначают буквой ω. Она измеряется в радианах в секунду, то есть показывает величину угла в радианах, на которые поворачивается вращающееся тело за одну секунду. Для угловой скорости в случае равномерного вращения справедлива формула:
Угловая частота, период и угловая скорость
Выше уже отмечалось, что важным свойством любого вращательного движения является время, за которое совершается один оборот. Это время называется периодом вращения. Его обозначают буквой T и измеряют в секундах. Формулу для периода T можно записать через угловую скорость ω. Соответствующее выражение имеет вид:
Величина, обратная периоду, называется частотой. Ее измеряют в герцах (Гц). Для кругового движения удобно использовать не саму частоту, а ее угловой аналог. Обозначим ее f. Формула частоты вращения угловой f имеет вид:
Чтобы рассчитать угловую частоту, необходимо знать период вращательного движения.
Сравнивая две последние формулы, приходим к следующему равенству:
Это равенство означает следующее:
- формулы угловой частоты и угловой скорости совпадают, поэтому эти величины равны численно между собой;
- так же как и скорость, частота показывает, на какой угол в радианах поворачивается тело за одну секунду.
Различие между этими величинами единственное: угловая частота является величиной скалярной, скорость же — это вектор.
Линейная скорость вращения, частота и частота угловая

В технике для некоторых вращающих конструкций, например, шестерен и валов, известны их рабочие частоты μ и линейные скорости v. Тем не менее каждую из этих характеристик можно использовать для определения угловой или циклической частоты.
Выше отмечалось, что частота μ измеряется в герцах. Она показывает количество оборотов вращающегося тела за одну секунду. Формула для нее принимает вид:
Если сравнить это выражение с соответствующим равенством для f, то формула, как найти частоту вращения f через μ описывающая, будет иметь вид:
Эта формула интуитивно понятна, поскольку μ показывает количество оборотов за единицу времени, а f отражает ту же самую величину, только представленную в радианах.
Линейная скорость v связана со скоростью угловой ω следующим равенством:
Поскольку модули величин f и ω равны, то из последнего выражения легко получить соответствующую формулу частоты вращения циклической. Запишем ее:
Где r — радиус вращения. Заметим, что скорость v линейно растет при увеличении радиуса r, при этом отношение этих величин является константой. Последнее умозаключение означает, что если измерять циклическую частоту вращения в любой точке сечения вращающегося массивного объекта, то она будет везде одинаковой.
Как определить частоту вращения шпинделя
Для этого необходимо создать технологическую карту изготовления детали. Вопрос решается в 5 этапов – рассмотрим каждый из них.
Уделяем внимание исходным данным
Нужно определить следующие параметры (в том числе и конкретные значения некоторых из них):
- Тип материала заготовки – чаще всего это углеродистая сталь, но также может быть выбран чугун или цветмет; важно понимать, что от плотности и сопротивления металла (пластика, дерева) зависит усилие, прикладываемое к поверхности для снятия нужного слоя.
- Диаметр детали – разброс здесь может быть довольно серьезным, плюс, следует учитывать еще и припуски, величина которых зависит от количества проходов и того класса точности, которого требуется достигнуть. Обычно проводятся черновые, чистовые, финишные операции, каждая из которых уменьшает не только степень шероховатости, но и размер сечения предмета.
- Длина заготовки – чем она больше, тем серьезнее нагрузка на вал и на зону его крепления (хвостовик); а значит этот параметр тоже важно принимать во внимание.
- Квалитет точности и необходимая степень шероховатости – прецизионная обработка возможна только на высокой скорости и при наличии ЧПУ, идеально позиционирующего инструмент и функциональные узлы по отношению друг к другу.
Применяем формулу оборотов шпинделя
Согласно ей, частота вращения находится как:

Где:
- V – скорость резания или, другими словами, тот путь, который лезвие проходит за расчетную единицу времени, измеряется в м/мин;
- d – диаметр кромки резца, в мм;
- π – 3,14 – постоянная величина.
Свое влияние на производительность технологической операции оказывает преобразователь (облегчает изменение параметров) и инвертор (частично компенсирует потерю крутящего момента при резком замедлении вала). Но при прочих равных на первый план по степени важности выходит сечение лезвия и конструктивные особенности самого оборудования.
Выбираем инструмент и станок
Раз чрезмерная частота вращения шпинделя (из формулы и объяснений выше) убыстряет износ кромок, логично отдавать предпочтение резцу, способному выдерживать максимально большое количество оборотов. Для этого он должен быть исполнен из износостойкого сплава или просто оставаться подходящей формы. Например, фрезы для создания канавок продержатся дольше тех, что предназначены для создания плоских поверхностей.
Если есть такая возможность, обязательно проводите визуальный осмотр инструмента, внимательно проверяя его на отсутствие изъянов: даже мельчайшие дефекты со временем разовьются и точно убыстрят износ.
При выборе оборудования учитывайте, какие задачи оно будет решать. Нанесение резьбы требует одной производительности, сверление или формовка корпусных деталей – уже другой, блок ЧПУ может убыстрять или замедлять работу и так далее. Возможности промышленного будут отличаться о того, что предназначено для домашней мастерской, и тому подобное.

Выполняем расчет оборотов шпинделя и режима резания
Составляется технологическая карта, а уже на ее основе – необходимые чертежи с информативными таблицами. При этом частота находится путем подстановки значений в указанную формулу. Диаметр – это известная или, по крайней мере, измеряемая величина, скорость перемещения – тоже. Исходя из ее показателей и принимается решение о производительности, с которой будет функционировать оборудование.
Проводим заключительный этап
После этого осуществляется проверка, в ходе которой определяется:
- соответствие фактической мощности привода проектным данным;
- надежность механизма подачи в течение определенного срока;
- прочность пластинки и державки – чтобы спрогнозировать выход из строя;
- полнота сопутствующей технологической оснастки;
- время выполнения одной операции, а на его основании – себестоимость детали.
С учетом результатов пробного запуска делается вывод об эффективности и актуальности режима и устанавливается, нужно ли вносить какие-либо изменения.
Задача на определение циклической частоты вращения вала

Угловые частоты вращения содержат полезную информацию, поскольку позволяют рассчитать такие важные физические характеристики, как момент импульса или угловую скорость. Решим такую задачу: известно, что рабочая частота вращения вала составляет 1500 оборотов в минуту. Чему равна циклическая частота для этого вала?
Из единиц измерения, приведенный в условии, понятно, что дана обычная частота μ. Поэтому формула частоты вращения вала циклической имеет вид:
Прежде чем ею пользоваться, следует перевести указанную в условии цифру к стандартным единицам измерения, то есть к обратным секундам. Поскольку вал за минуту делает 1500 оборотов, то за секунду он сделает в 60 раз меньше оборотов, то есть 25. То есть частота его вращения равна 25 Гц. Подставляя это число в записанную выше формулу, получаем значение циклической частоты: f = 157 рад/с.
Рекомендации по выбору режима резания
Рассмотрим еще несколько распространенных случаев и те стандартные и проверенные на практике решения, которые допустимо и рационально применять в данных ситуациях.
Число оборотов шпинделя токарного станка слишком велико
Даже минимальное для оборудования количество может быть чрезмерным. Чаще всего это наблюдается тогда, когда лезвием большого диаметра пытаются обработать какой-то материал повышенной прочности. Можно предпринять следующее:
- Заменить инструмент – на тот, что выполнен из твердосплавного металла и обладает покрытием, защищающим от нагрева в условиях повышенных температур.
- Взять на вооружение HSM-технологию, в соответствии с которой первый проход выполняется на всю длину кромки, а дальнейшие – лишь на четверть; это позволит убыстрить процесс производства, не повышая степень износа или вероятность возникновения поломок.
- Снизить диаметр резца, благодаря чему замедлится динамика окружного движения.
Скорость подачи слишком мала
Если привод стабильно не обеспечивает необходимую производительность труда, можно принять одно из следующих решений:
- Взять фрезу с сечением побольше – совет выглядит банальным, но на практике многие новички пренебрегают таким, казалось бы, простым решением.
- Уменьшить количество оборотов вала вплоть до тех пор, пока мощность не дойдет до нижнего предела допуска, то есть руководствоваться принципом «медленно, но верно».
- Взять инструмент, у которого меньше зубьев – актуально для вязких материалов, так как позволяет упростить отвод стружки; вместо трех заходов отдайте предпочтение одному, и тем самым увеличите подачу на резец втрое.
Налипание отходов при фрезеровании алюминиевых деталей
Данный металл отличается низкой температурой плавления и поэтому в значительном количестве остается на поверхности разогревшейся кромки. Новички часто решают этот вопрос путем замедления техпроцесса, но ведь это значительно снижает производительность труда, и выпуск заготовок обходится дороже.
Поэтому нужно поступить по-другому, а именно пересмотреть состав смазочно-охлаждающей жидкости, а если он в норме, то использовать его в большем объеме. Если оборудование в принципе не потребляет СОЖ, необходимо внедрить одно из альтернативных решений, допустим, удалять стружку вакуумным методом или периодически продувать зону контакта сжатым воздухом.

Обработка глубоких отверстий
В данную категорию попадают те, чья глубина в 6 раз больше диаметра. В этой ситуации важно не столько число оборотов шпинделя (формула его вычисления не поменялась), сколько специфика выполнения операции. Чтобы предотвратить поломку лезвия или его уход с оси, следует:
- использовать сверло с параболическими канавками, а не фрезу;
- постоянно и под давлением подавать СОЖ – смазка сможет эффективно вымывать стружку;
- периодически вынимать инструмент – как раз чтобы выполнять отвод снятого материала;
- решать задачу последовательно, в два резца разных диаметров – первую половину проходить тем, что поуже, вторую – тем, что пошире;
- убыстрить процесс – так, чтобы отходы шли непрерывной спиралью.
Как фрезеровать пазы
Для этого необходимо правильно соотнести глубину и ширину стружки с производительностью оборудования. Вы уже знаете, как рассчитать обороты шпинделя, а значит сможете без проблем вычислить скорость, обладая данными о диаметре фрезы.
Поэтому сосредоточим внимание на других закономерностях. Например, на том факте, что погружение в деталь способствует более равномерному распределению нагрузок, но оно же усиливает отгиб кромки и ухудшает отвод отходов. Ну а увеличение ширины приводит к замедлению обработки, а значит к производственным потерям.
Оптимальное сочетание в данном случае находится опытным путем: необходимо протестировать технику в самых разных режимах, и найти тот, который сможет лучше всего удовлетворять условиям выпуска. Важный момент: пробная заготовка должна быть идентична «реальной» во всем, в том числе и в материале исполнения. Только такой подход обеспечит необходимую точность результатов.
Теперь, когда вы знаете о вопросе все, вплоть до единицы измерения частоты вращения шпинделя (об/мин), можете заранее рассчитать, какая скорость нужны для выполнения актуальных технологических операций, и выбрать подходящее оборудование. Ответственные заводы-изготовители конструируют свои станки с учетом актуальных потребностей предприятий, включая в базовую комплектацию разнообразие инструментов, решений и технологий для обработки самых разных заготовок из металла, пластика, дерева. Именно такой подход исповедует ижевский «Сармат», в каталоге которого вы найдете сразу ряд достойных моделей – надежных, удобных в пользовании, высокопроизводительных, экономичных.

Частота вращения: формула
Количество повторений каких-либо событий или их возникновения за одну единицу таймера называется частотой. Это физическая величина измеряется в герцах – Гц (Hz). Она обозначается буквами ν, f, F, и есть отношение количества повторяющихся событий к промежутку времени, в течение которого они произошли.
При обращении предмета вокруг своего центра можно говорить о такой физической величине, как частота вращения, формула:
- N – количество оборотов вокруг оси или по окружности,
- t – время, за которое они были совершены.
В системе СИ обозначается как – с-1 (s-1) и именуется как обороты в секунду (об/с). Применяют и другие единицы вращения. При описании вращения планет вокруг Солнца говорят об оборотах в часах. Юпитер делает одно вращение в 9,92 часа, тогда как Земля и Луна оборачиваются за 24 часа.
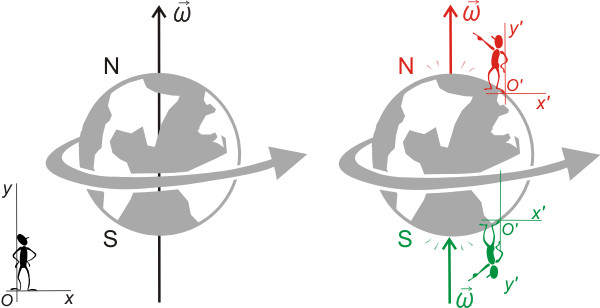
Движение по циклоиде*
В системе отсчета, связанной с колесом, точка равномерно вращается по окружности радиуса R со скоростью , которая изменяется только по направлению. Центростремительное ускорение точки направлено по радиусу к центру окружности.
Теперь перейдем в неподвижную систему, связанную с землей. Полное ускорение точки А останется прежним и по модулю, и по направлению, так как при переходе от одной инерциальной системы отсчета к другой ускорение не меняется. С точки зрения неподвижного наблюдателя траектория точки А — уже не окружность, а более сложная кривая (циклоида), вдоль которой точка движется неравномерно.
Мгновенная скорость определяется по формуле
Номинальная скорость вращения
Прежде, чем дать определение этому понятию, необходимо определиться, что такое номинальный режим работы какого-либо устройства. Это такой порядок работы устройства, при котором достигаются наибольшая эффективность и надёжность процесса на продолжении длительного времени. Исходя из этого, номинальная скорость вращения – количество оборотов в минуту при работе в номинальном режиме. Время, необходимое для одного оборота, составляет 1/v секунд. Оно называется периодом вращения T. Значит, связь между периодом обращения и частотой имеет вид:
К сведению. Частота вращения вала асинхронного двигателя – 3000 об./мин., это номинальная скорость вращения выходного хвостовика вала при номинальном режиме работы электродвигателя.
Как найти или узнать частоты вращений различных механизмов? Для этого применяется прибор, который называется тахометр.
Угловая скорость
Когда тело движется по окружности, то не все его точки движутся с одинаковой скоростью относительно оси вращения. Если взять лопасти обычного бытового вентилятора, которые вращаются вокруг вала, то точка расположенная ближе к валу имеет скорость вращения больше, чем отмеченная точка на краю лопасти. Это значит, у них разная линейная скорость вращения. В то же время угловая скорость у всех точек одинаковая.
Угловая скорость представляет собой изменение угла в единицу времени, а не расстояния. Обозначается буквой греческого алфавита – ω и имеет единицу измерения радиан в секунду (рад/с). Иными словами, угловая скорость – это вектор, привязанный к оси обращения предмета.
Формула для вычисления отношения между углом поворота и временным интервалом выглядит так:
- ω – угловая скорость (рад./с);
- ∆ϕ – изменение угла отклонения при повороте (рад.);
- ∆t – время, затраченное на отклонение (с).
Обозначение угловой скорости употребляется при изучении законов вращения. Оно употребляется при описании движения всех вращающихся тел.
Угловая скорость в конкретных случаях
На практике редко работают с величинами угловой скорости. Она нужна при конструкторских разработках вращающихся механизмов: редукторов, коробок передач и прочего.
Вычислить её, применяя формулу, можно. Для этого используют связь угловой скорости и частоты вращения.
- π – число, равное 3,14;
- ν – частота вращения, (об./мин.).
В качестве примера могут быть рассмотрены угловая скорость и частота вращения колёсного диска при движении мотоблока. Часто необходимо уменьшить или увеличить скорость механизма. Для этого применяют устройство в виде редуктора, при помощи которого понижают скорость вращения колёс. При максимальной скорости движения 10 км/ч колесо делает около 60 об./мин. После перевода минут в секунды это значение равно 1 об./с. После подстановки данных в формулу получится результат:
К сведению. Снижение угловой скорости часто требуется для того, чтобы увеличить крутящий момент или тяговое усилие механизмов.
Как определить угловую скорость
Принцип определения угловой скорости зависит от того, как происходит движение по окружности. Если равномерно, то употребляется формула:
Если нет, то придётся высчитывать значения мгновенной или средней угловой скорости.
Величина, о которой идёт разговор, векторная, и при определении её направления используют правило Максвелла. В просторечии – правило буравчика. Вектор скорости имеет одинаковое направление с поступательным перемещением винта, имеющего правую резьбу.
Рассмотрим на примере, как определить угловую скорость, зная, что угол поворота диска радиусом 0,5 м меняется по закону ϕ = 6*t:
Вектор ω меняется из-за поворота в пространстве оси вращения и при изменении значения модуля угловой скорости.
Связь со вторым законом Ньютона
Согласно второму закону Ньютона причиной любого ускорения является сила. Если движущееся тело испытывает центростремительное ускорение, то природа сил, действием которых вызвано это ускорение, может быть различной. Например, если тело движется по окружности на привязанной к нему веревке, то действующей силой является сила упругости.
Если тело, лежащее на диске, вращается вместе с диском вокруг его оси, то такой силой является сила трения. Если сила прекратит свое действие, то далее тело будет двигаться по прямой
Угол поворота и период обращения
Рассмотрим точку А на предмете, вращающимся вокруг своей оси. При обращении за какой-то период времени она изменит своё положение на линии окружности на определённый угол. Это угол поворота. Он измеряется в радианах, потому что за единицу берётся отрезок окружности, равный радиусу. Ещё одна величина измерения угла поворота – градус.
Когда в результате поворота точка А вернётся на своё прежнее место, значит, она совершила полный оборот. Если её движение повторится n-раз, то говорят о некотором количестве оборотов. Исходя из этого, можно рассматривать 1/2, 1/4 оборота и так далее. Яркий практический пример этому – путь, который проделывает фреза при фрезеровании детали, закреплённой в центре шпинделя станка.
Внимание! Угол поворота имеет направление. Оно отрицательное, когда вращение происходит по часовой стрелке и положительное при вращении против движения стрелки.
Если тело равномерно продвигается по окружности, можно говорить о постоянной угловой скорости при перемещении, ω = const.
В этом случае находят применения такие характеристики, как:
- период обращения – T, это время, необходимое для полного оборота точки при круговом движении;
- частота обращения – ν, это полное количество оборотов, которое совершает точка по круговой траектории за единичный временной интервал.
Интересно. По известным данным, Юпитер обращается вокруг Солнца за 12 лет. Когда Земля за это время делает вокруг Солнца почти 12 оборотов. Точное значение периода обращения круглого гиганта – 11,86 земных лет.
Распространенные ошибки при выборе режимов резания
Очень часто начинающие токари и фрезеровщики не согласовывают скорости – это оборачивается концентрацией напряжений на кромке, а значит повышает вероятность поломки инструмента в таких «критических» точках и вызывает другие проблемы.
Есть две классические ситуации:
- Максимальные обороты при медленной подаче – при этом серьезно падает качество обработки. Кроме того, резец будет не снимать стружку, а лишь давить на поверхность, сначала лишь шлифуя ее, а потом уже вызывая прижог; при этом не просто действуя вхолостую, а даже теряя в прочности, ведь будет наблюдаться отгибание кромки.
- Обратная ситуация приводит к тому, что лезвие убирает слишком много материала и вместе с тем испытывает чрезмерную нагрузку, в результате чего скалывается и оставляет царапины и другие дефекты на той плоскости, которая должна быть гладкой.
Поэтому на практике нужно проводить расчет частоты вращения шпинделя для каждой технологической операции и, на основе полученных результатов, соотносить подачу, чтобы обеспечивать не только скорость, но и точность, и безопасность процесса. Тем более что все величины можно принимать в некотором диапазоне – всегда есть место для допусков. Помните, что длительная эксплуатация инструмента – следствие правильного подхода, тогда как неожиданная поломка – результат допущенных ошибок.
И универсальный совет – проводите обработку в несколько этапов: сначала черновую, по максимуму снимая ненужный металл, потом чистовую, более медленно, и, наконец, финишную – для шлифовки мельчайших неровностей.

Циклическая частота вращения (обращения)
Скалярная величина, измеряющая частоту вращательного движения, называется циклической частотой вращения. Это угловая частота, равная не самому вектору угловой скорости, а его модулю. Ещё её именуют радиальной или круговой частотой.
Циклическая частота вращения – это количество оборотов тела за 2*π секунды.
У электрических двигателей переменного тока это частота асинхронная. У них частота вращения ротора отстаёт от частоты вращения магнитного поля статора. Величина, определяющая это отставание, носит название скольжения – S. В процессе скольжения вал вращается, потому что в роторе возникает электроток. Скольжение допустимо до определённой величины, превышение которой приводит к перегреву асинхронной машины, и её обмотки могут сгореть.
Устройство этого типа двигателей отличается от устройства машин постоянного тока, где токопроводящая рамка вращается в поле постоянных магнитов. Большое количество рамок вместил в себя якорь, множество электромагнитов составили основу статора. В трёхфазных машинах переменного тока всё наоборот.
При работе асинхронного двигателя статор имеет вращающееся магнитное поле. Оно всегда зависит от параметров:
- частоты питающей сети;
- количества пар полюсов.
Скорость вращения ротора состоит в прямом соотношении со скоростью магнитного поля статора. Поле создаётся тремя обмотками, которые расположены под углом 120 градусов относительно друг друга.
Переход от угловой к линейной скорости
Существует различие между линейной скоростью точки и угловой скоростью. При сравнении величин в выражениях, описывающих правила вращения, можно увидеть общее между этими двумя понятиями. Любая точка В, принадлежащая окружности с радиусом R, совершает путь, равный 2*π*R. При этом она делает один оборот. Учитывая, что время, необходимое для этого, есть период Т, модульное значение линейной скорости точки В находится следующим действием:
Так как ω = 2*π*ν, то получается:
Следовательно, линейная скорость точки В тем больше, чем дальше от центра вращения находится точка.
К сведению. Если рассматривать в качестве такой точки города на широте Санкт-Петербурга, их линейная скорость относительно земной оси равна 233 м/с. Для объектов на экваторе – 465 м/с.
Числовое значение вектора ускорения точки В, движущейся равномерно, выражается через R и угловую скорость, таким образом:
а = ν2/ R, подставляя сюда ν = ω* R, получим: а = ν2/ R = ω2* R.
Это значит, чем больше радиус окружности, по которой движется точка В, тем больше значение её ускорения по модулю. Чем дальше расположена точка твердого тела от оси вращения, тем большее ускорение она имеет.
Поэтому можно вычислять ускорения, модули скоростей необходимых точек тел и их положений в любой момент времени.
Понимание и умение пользоваться расчётами и не путаться в определениях помогут на практике вычислениям линейной и угловой скоростей, а также свободно переходить при расчётах от одной величины к другой.
Линейная скорость
Каждая точка на окружности движется с некоторой скоростью. Эту скорость называют линейной. Направление вектора линейной скорости всегда совпадает с касательной к окружности.
Например, искры из-под точильного станка двигаются, повторяя направление мгновенной скорости.

Рассмотрим точку на окружности, которая совершает один оборот, время, которое затрачено — это есть период T
. Путь, который преодолевает точка — это есть длина окружности.
Расчёт частот вращения рабочих органов станка
Определяем частоты вращения всех основных механизмов:
Частота вращения главного вала 3

Частота вращения кулачкового вала 21

Частота вращения поперечного вала 8, пазового кулачка 10

Частота вращения продольного вала 11

Частота вращения товарного валика 18

Частота вращения вальяна 17

Частота вращения эксцентрикового вала 14 зевообразовательного механизма

Частота вращения навоя 13
Расчёт скоростей вращения рабочих органов станка
Определяем скорости вращения всех основных механизмов:
Скорость вращения главного вала 3
Скорость вращения товарного валика 18
Скорость вращения вальяна 17
Скорость вращения поперечного вала 8
Скорость вращения навоя 13
Расчет плотности по утку
Определим длину ткани L, которую отводит товарный регулятор за один оборот главного вала станка:

=0,120 м — диаметр вальяна,
Так как за один оборот главного вала в ткань вводится одно уточная нить, длина L может быть определена по формуле:

Где РУ — плотность ткани по утку, нитей на 1 см.
Подставим значение L, получим:

Определим коэффициент, объединяющий постоянные величины.

Тогда

Выбираем сменные шестерни
Zсм1=34;
Zсм2=49;
Zсм3=52;
Zсм4=46
Фактическая плотность по утку:
Определение заправочного натяжения
ткацкий станок кинематический вращение
Составим уравнения моментов, пользуясь схемой действия сил для определения заправочного натяжения нитей основы на ткацком станке СТБ. Пренебрегая силой тяжести рычагов и трением в опорах, можно составить следующее уравнение моментов относительно оси вращения рычага скала (рис. 13):
Где Q — сила пружины, Н;
N — нормальное давление основы на скало, Н;
G — сила тяжести скала, Н;
— длины плеч действия сил, м.

Рисунок 13. Расчетная схема основного регулятора
1- основа , 2 -навой, 3 -скало, 4, 5 -рычаги, 6 -пружина, 7 -рычаг , 8 -палец, 9 -тяга, 10- болты, 11- кулиса, 12, 13- рычаг, 14- ролик, 15- горка, 16 -диск фрикциона, 17 -валик, 18 -наборный валик, 19- ведомый диск, 20 -тормозной диск, 21- втулка, 22 -пружина, 23 -пластина
 Тогда
Тогда

или
,
Где F — натяжение основы, Н.
Из последнего уравнения определяем натяжение нитей основы:

Скало представляем в виде трубы с толщиной стенки 5 мм
Объем скала.
Vск=р*(rск12-rск22)*L
Vск=3, 14*(6, 72-5, 72)*180=7012 см3
Масса скала:
m=с*V=7012*0, 0078=54, 69 кг
Сила тяжести скала
G=m*g=54, 69*9, 81=536, 5 Н
Тогда натяжение основы

Так как на скало действуют две пружины, по одной с каждой стороны, то заправочное натяжение основы
F0=2*F=2*3782=7564 Н
Натяжение, приходящееся на 1 нить:

Натяжение нитей основы возрастает по мере уменьшения диаметра намотки. Статическая составляющая возрастает в связи с постепенным понижением уровня скала, при этом изменяются параметры плеч, и возрастает сила пружины. Динамическая составляющая возрастает в связи с необходимостью более раннего отклонения скала для увеличения угла поворота навоя при уменьшении диаметра намотки основы.
Расчет навоя
В процессе ткачества при выработке легких и средних тканей основа подается в рабочую зону ткацкого станка с навоя. При выработке тяжелых тканей — со шпулярника.
Навой ткацкого станка представляет собой стальную полую трубу. На стволе крепится 2 фланца, тормозной шкив и зубчатое колесо, которое входит в зацепление с поднавойной шестерней.
Основа наматывается между фланцами на ствол навоя, сам навой установлен в подшипниках станка на цапфах. Несмотря на высокую жесткость трубы, навой под действием упругой силы основных нитей претерпевает изгиб, что приводит к созданию неодинаковых условий прибоя уточных нитей. Ствол навоя можно рассматривать как вал с равномерной нагрузкой q на участке между фланцами. (рис. 14)
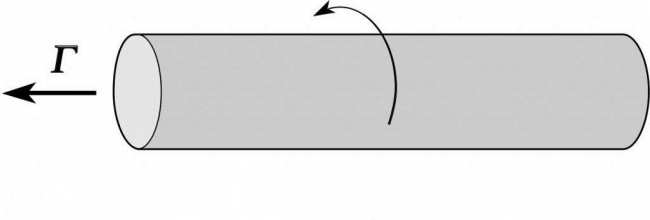
Кроме изгиба, под действием сил натяжения нитей основы вал претерпевает скручивание.

Рисунок 14. Схема загрузки навоя (а) и эпюры изгибающих моментов (б, в)
Рассмотрим навой как балку, находящуюся на двух опорах. На эту балку действует равномерно распределенная нагрузка.
1) Сила натяжения нитей основы: F=7564 Н
В лаборатории вуза на станке измеряем величину L- длину той части навоя, на которую действуют нагрузки от натяжения нитей L=1800 мм.
Определяем действующую на навой распределённую нагрузку:

4) Определяем значение изгибающего момента навоя:

5) Определяем момент сопротивления сечения при изгибе. Принимаем, что навой изготовлен из стальной трубы с толщиной стенки 5 мм, тогда
D=D-2?д=59-2*5= 49 мм:

6) Определяем напряжения, возникающие при изгибе;

7) Определяем момент кручения навоя при полной заправке:
Где R- радиус ствола навоя
 Определяем момент сопротивления сечения при кручении:
Определяем момент сопротивления сечения при кручении:

9) Определяем напряжения, возникающие при кручении:

10) Определяем общий момент (эквивалентный):

11) Сравниваем полученное значение эквивалентного напряжения с допускаемым: — допускаемое напряжение, (7,стр. 64), для стали 40Х, =200 Н/мм2.

.
Условие прочности выполняется.
Содержание
- Линейная скорость вращения, частота и частота угловая
- Число оборотов
- Угловая скорость
- Описывающие вращение физические величины
- Мощность вращающихся объектов
- Задача на определение циклической частоты вращения вала
- Линейная скорость вращения, частота и частота угловая
- Коэффициент полезного действия электромотора
- Угловая частота, период и угловая скорость
- Переменный синусоидальный ток
- Угловая частота, период и угловая скорость
- Вращательное движение тела, формулы
- Экономическое обоснование эффекта от инвертора
- Основные формулы расчета мощности двигателей
- Угловая скорость в спорте
- Описывающие вращение физические величины
- Описывающие вращение физические величины
- Как подключить частотный преобразователь
- Циклическая частота вращения (обращения)
- Задача на определение циклической частоты вращения вала
- Период пульсаций и частота
- Интенсивность циклов
- Опасность разночастотных зарядов
- Генерирование переменного тока
- Инвертор
- Фазорасщепитель
Линейная скорость вращения, частота и частота угловая
В технике для некоторых вращающих конструкций, например, шестерен и валов, известны их рабочие частоты μ и линейные скорости v. Тем не менее каждую из этих характеристик можно использовать для определения угловой или циклической частоты.
Выше отмечалось, что частота μ измеряется в герцах. Она показывает количество оборотов вращающегося тела за одну секунду. Формула для нее принимает вид:
Если сравнить это выражение с соответствующим равенством для f, то формула, как найти частоту вращения f через μ описывающая, будет иметь вид:
Эта формула интуитивно понятна, поскольку μ показывает количество оборотов за единицу времени, а f отражает ту же самую величину, только представленную в радианах.
Линейная скорость v связана со скоростью угловой ω следующим равенством:
Поскольку модули величин f и ω равны, то из последнего выражения легко получить соответствующую формулу частоты вращения циклической. Запишем ее:
Где r — радиус вращения. Заметим, что скорость v линейно растет при увеличении радиуса r, при этом отношение этих величин является константой. Последнее умозаключение означает, что если измерять циклическую частоту вращения в любой точке сечения вращающегося массивного объекта, то она будет везде одинаковой.
Число оборотов
Характеристикой всех видов вращения является число оборотов n или равноценная ей характеристика — частота f. Обе величины характеризуют число оборотов в единицу времени.
Единица СИ частоты (или числа оборотов)
В технике число оборотов обычно измеряется в оборотах в минуту (об/мин) = 1/мин.
Таким образом, величина, обратная числу оборотов, есть продолжительность одного оборота.
Если n — число оборотов, f — частота, T — продолжительность одного оборота, период, ? — угловое перемещение, N — полное число оборотов, t — время, продолжительность вращения, ? — угловая частота,
то
Угловое перемещение равно произведению полного числа оборотов на 2?:
Угловая скорость
Из формулы для одного оборота следует:
Обратите внимание:• формулы справедливы для всех видов вращательного движения — как для равномерного движения, так и для ускоренного. В них могут входить постоянные величины, средние значения, начальные и конечные значения, а также любые мгновенные значения.• вопреки своему названию число оборотов n — это не число, а физическая величина.• следует различать число оборотов n и полное число оборотов N
Описывающие вращение физические величины
Для численного описания вращения в физике был введен ряд характеристик. Перечислим их и охарактеризуем.
В первую очередь это угол поворота, обозначается θ. Поскольку полная окружность характеризуется центральным углом в 2*pi радиан, то, зная величину θ, на которую повернулось вращающееся тело за определенный промежуток времени, можно определить число оборотов за это время. Кроме того, угол θ позволяет рассчитать линейный путь, пройденный телом вдоль кривой окружности. Соответствующие формулы для числа оборотов n и пройденного пути L имеют вид:
n = θ/(2*pi);
L = θ*r.
Где r — радиус окружности или радиус вращения.
Следующей характеристикой рассматриваемого типа движения является угловая скорость. Ее обычно обозначают буквой ω. Она измеряется в радианах в секунду, то есть показывает величину угла в радианах, на которые поворачивается вращающееся тело за одну секунду. Для угловой скорости в случае равномерного вращения справедлива формула:
ω = θ/t
Мощность вращающихся объектов
Для расчета подобной системы применяют формулу:
N = M * w = (2π * M* n)/60,
где:
- M – момент силы;
- w – угловая скорость, характеризующая вращение;
- n – количество оборотов, которое совершает двигатель или другое устройство за 60 секунд.
Приведенные сведения используют с учетом целевого назначения и реальных условий. Так, в термодинамике необходимо помнить о зависимости эффективности системы от температуры окружающей среды. Тепловые потери нагревателя оценивают по соответствующей мощности на единицу площади поверхности. Аналогичным образом поступают при решении механических задач для расчета тяги, КПД, иных рабочих параметров. Как правило, приходится специальным коэффициентом компенсировать трение.
В электрических цепях ток ограничивает сопротивление проводника. Для небольших расстояний при малой мощности тщательные расчеты не нужны. Однако проект магистральной трассы обязательно содержит соответствующие вычисления. На основе полученных результатов делают выводы о среднегодовых экономических показателях. Следует помнить о необходимости учета искажений, которые добавляют при работе с переменным напряжением реактивные нагрузки.
Задача на определение циклической частоты вращения вала
Угловые частоты вращения содержат полезную информацию, поскольку позволяют рассчитать такие важные физические характеристики, как момент импульса или угловую скорость. Решим такую задачу: известно, что рабочая частота вращения вала составляет 1500 оборотов в минуту. Чему равна циклическая частота для этого вала?
Из единиц измерения, приведенный в условии, понятно, что дана обычная частота μ. Поэтому формула частоты вращения вала циклической имеет вид:
f = 2*pi*μ
Прежде чем ею пользоваться, следует перевести указанную в условии цифру к стандартным единицам измерения, то есть к обратным секундам. Поскольку вал за минуту делает 1500 оборотов, то за секунду он сделает в 60 раз меньше оборотов, то есть 25. То есть частота его вращения равна 25 Гц. Подставляя это число в записанную выше формулу, получаем значение циклической частоты: f = 157 рад/с.
Линейная скорость вращения, частота и частота угловая
В технике для некоторых вращающих конструкций, например, шестерен и валов, известны их рабочие частоты μ и линейные скорости v. Тем не менее каждую из этих характеристик можно использовать для определения угловой или циклической частоты.
Выше отмечалось, что частота μ измеряется в герцах. Она показывает количество оборотов вращающегося тела за одну секунду. Формула для нее принимает вид:
μ = 1/T
Если сравнить это выражение с соответствующим равенством для f, то формула, как найти частоту вращения f через μ описывающая, будет иметь вид:
f = 2*pi*μ
Эта формула интуитивно понятна, поскольку μ показывает количество оборотов за единицу времени, а f отражает ту же самую величину, только представленную в радианах.
Линейная скорость v связана со скоростью угловой ω следующим равенством:
v = ω*r
Поскольку модули величин f и ω равны, то из последнего выражения легко получить соответствующую формулу частоты вращения циклической. Запишем ее:
f = v/r
Где r — радиус вращения. Заметим, что скорость v линейно растет при увеличении радиуса r, при этом отношение этих величин является константой. Последнее умозаключение означает, что если измерять циклическую частоту вращения в любой точке сечения вращающегося массивного объекта, то она будет везде одинаковой.
Коэффициент полезного действия электромотора
КПД — это характеристика, которая отражает эффективность работы системы при преобразовании энергии в механическую. Выражается отношением полезной энергии к потраченной. По единой системе единиц измерений он обозначается как «eta» и является безразмерным значением, исчисляемым в процентах. Формула КПД электродвигателя через мощность:
eta = P2 ÷ P1, где:
P1 — электрическая (подаваемая) мощность, Вт;
P2 — полезная (механическая) мощность, Вт;
Также он может быть выражен как:
eta = A ÷ Q × 100 %, где:
A — полезная работа, Дж;
Q — затраченная энергия, Дж.
Чаще коэффициент вычисляют по формуле потребляемой мощности электродвигателя, так как эти показатели всегда легче измерить.
Снижение эффективности работы электродвигателя происходит по причине:
Электрических потерь. Это происходит в результате нагрева проводников от прохождения по ним тока. Магнитных потерь
Вследствие излишнего намагничивания сердечника появляется гистерезис и вихревые токи, что важно учитывать в формуле мощности электродвигателя. Механических потерь
Они связаны с трением и вентиляцией. Дополнительных потерь. Они появляются из-за гармоник магнитного поля, так как статор и ротор имеют зубчатую форму. Также в обмотке присутствуют высшие гармоники магнитодвижущей силы.
Следует отметить, что КПД является одним из самых важных компонентов формулы расчета мощности электродвигателя, так как позволяет получить цифры, наиболее приближенные к действительности. В среднем этот показатель варьирует от 10% до 99%. Она зависит от конструктивного устройства механизма.
Угловая частота, период и угловая скорость
Выше уже отмечалось, что важным свойством любого вращательного движения является время, за которое совершается один оборот. Это время называется периодом вращения. Его обозначают буквой T и измеряют в секундах. Формулу для периода T можно записать через угловую скорость ω. Соответствующее выражение имеет вид:
T = 2*pi/ω
Величина, обратная периоду, называется частотой. Ее измеряют в герцах (Гц). Для кругового движения удобно использовать не саму частоту, а ее угловой аналог. Обозначим ее f. Формула частоты вращения угловой f имеет вид:
f = 2*pi/T
Чтобы рассчитать угловую частоту, необходимо знать период вращательного движения.
Сравнивая две последние формулы, приходим к следующему равенству:
f = ω
Это равенство означает следующее:
- формулы угловой частоты и угловой скорости совпадают, поэтому эти величины равны численно между собой;
- так же как и скорость, частота показывает, на какой угол в радианах поворачивается тело за одну секунду.
Различие между этими величинами единственное: угловая частота является величиной скалярной, скорость же — это вектор.
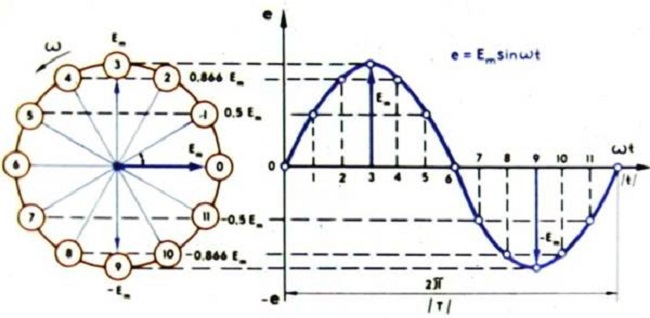
Переменный синусоидальный ток
Это тот ток, который периодически меняется во времени, и его изменения подчиняются закону синусоиды. Это элементарное движение электрических зарядов, потому дальнейшему разложению на простые токи оно не подлежит.
Вид формулы такого переменного тока:
i = Im*sinωt,
где:
- Im – амплитуда;
- sinωt – фаза синусоидального тока, рад.
Здесь ω = const, называется угловой частотой переменного электричества, причём угол ωt находится в прямой временной зависимости.
Зная частоту f исходного тока, можно вычислить его угловую частоту, применив выражение:
ω = 2πf = 2π/Т.
Тут 2π – это выраженное в радианах значение центрального угла окружности:
- Т = 2 π радиан = 3600;
- Т/2 = π = 1800;
- Т/4 = π/2 = 900.
Если выразить 1 рад в градусах, то он будет равен 57°17′.
 Синусоидальное переменное движение электронов
Синусоидальное переменное движение электронов
Угловая частота, период и угловая скорость
Выше уже отмечалось, что важным свойством любого вращательного движения является время, за которое совершается один оборот. Это время называется периодом вращения. Его обозначают буквой T и измеряют в секундах. Формулу для периода T можно записать через угловую скорость ω. Соответствующее выражение имеет вид:
Величина, обратная периоду, называется частотой. Ее измеряют в герцах (Гц). Для кругового движения удобно использовать не саму частоту, а ее угловой аналог. Обозначим ее f. Формула частоты вращения угловой f имеет вид:
Чтобы рассчитать угловую частоту, необходимо знать период вращательного движения.
Сравнивая две последние формулы, приходим к следующему равенству:
Это равенство означает следующее:
- формулы угловой частоты и угловой скорости совпадают, поэтому эти величины равны численно между собой;
- так же как и скорость, частота показывает, на какой угол в радианах поворачивается тело за одну секунду.
Различие между этими величинами единственное: угловая частота является величиной скалярной, скорость же — это вектор.
Вращательное движение тела, формулы
Кроме того, эти величины связаны определенным образом с угловым перемещением ?, угловой скоростью ? и угловым ускорением ?.
| Sл | перемещение тела по траектории, | метр |
|---|---|---|
| Uл | скорость тела при движении по траектории, | метр / секунда |
| aл | ускорение данного тела при движении по траектории, | метр / секунда2 |
| r | радиус траектории, | метр |
| d | диаметр траектории, | метр |
| ? | угловое перемещение тела, | радиан |
| ? | угловая скорость тела, | радиан / секунда |
| ? | угловое ускорение тела, | радиан / секунда2 |
| f | частота, | Герц |
Примечание:Формулы справедливы для постоянных, мгновенных и средних величин, во всех случаях движения тела по окружности.
Экономическое обоснование эффекта от инвертора
Время окупаемости инвертора рассчитывается отношением затрат на покупку к экономии энергии. Экономия обычно равна от 20 до 40% от номинальной мощности мотора.
Затраты снижают факторы, повышающие производительность частотных преобразователей:
- Уменьшение затрат на обслуживание.
- Повышение ресурса двигателя.
Экономия рассчитывается:
где Э – экономия денег в рублях;
Рпч – мощность инвертора;
Ч – часов эксплуатации в день;
Д – число дней;
К – коэффициент ожидаемого процента экономии;
Т – тариф энергии в рублях.
Время окупаемости равно отношению затрат на покупку инвертора к экономии денег. Расчеты показывают, что период окупаемости получается от 3 месяцев до 3 лет. Это зависит от мощности мотора.
Модуль №4. Частотное регулирование скорости асинхронного двигателя
 Watch this video on YouTube
Watch this video on YouTube
Основные формулы расчета мощности двигателей
Для вычисления реальных характеристик механизмов всегда нужно учитывать много параметров. в первую очередь нужно знать, какой ток подается на обмотки электродвигателя: постоянный или переменный. Принцип их работы отличается, следовательно, отличаются метод вычислений. Если упрощенный вид расчета мощности привода выглядит как:
Pэл = U × I, где
I — сила тока, А;
U — напряжение, В;
Pэл — подведенная электрическая мощность. Вт.
В формуле мощности электродвигателя переменного тока необходимо также учитывать сдвиг фаз (alpha). Соответственно, расчеты для асинхронного привода выглядят как:
Pэл = U × I × cos(alpha).
Кроме активной (подведенной) мощности существует также:
- S — реактивная, ВА. S = P ÷ cos(alpha).
- Q — полная, ВА. Q = I × U × sin(alpha).
В расчетах также необходимо учитывать тепловые и индукционные потери, а также трение. Поэтому упрощенная модель формулы для электродвигателя постоянного тока выглядит как:
Pэл = Pмех + Ртеп +Ринд + Ртр, где
Рмех — полезная вырабатываемая мощность, Вт;
Ртеп — потери на образование тепла, ВТ;
Ринд — затраты на заряд в индукционной катушке, Вт;
Рт — потери в результате трения, Вт.
Угловая скорость в спорте
Угловая скорость часто используется в спорте. Например, спортсмены уменьшают или увеличивают угловую скорость движения клюшки для гольфа, биты или ракетки, чтобы улучшить результаты. Угловая скорость связана с линейной скоростью так, что из всех точек на отрезке, вращающемся вокруг точки на этом отрезке, то есть вокруг центра вращения, самая отдаленная точка от этого центра движется с самой высокой линейной скоростью. Так, например, если клюшка для гольфа вращается, то конец этой клюшки, больше всего удаленный от центра вращения двигается с самой высокой линейной скоростью. В то же время все точки на этом отрезке движутся с одинаковой угловой скоростью. Поэтому удлиняя клюшку, биту, или ракетку, спортсмен также увеличивает линейную скорость, а соответственно скорость удара, передающуюся мячу, так что он может пролететь на большее расстояние. Укорачивая ракетку или клюшку, даже перехватив ее ниже, чем обычно, наоборот замедляют скорость удара.
При первобытнообщинном строе главными охотниками были мужчины
 Спортсменам с более длинными руками и ногами удается добиться бо́льшей угловой скорости
Спортсменам с более длинными руками и ногами удается добиться бо́льшей угловой скорости
У высоких людей с длинными конечностями есть преимущество в отношении линейной скорости. То есть, передвигая ноги с одинаковой угловой скоростью, они двигают ступни с более высокой линейной скоростью. То же происходит и с их руками. Такое преимущество может быть одной из причин того, что в первобытных обществах мужчины занимались охотой чаще, чем женщины. Вероятно, что из-за этого также в процессе эволюции выиграли более высокие люди. Длинные конечности помогали не только в беге, но и во время охоты — длинные руки бросали копья и камни с большей линейной скоростью. С другой стороны, длинные руки и ноги могут быть неудобством. Длинные конечности имеют больший вес и для их перемещения нужна дополнительная энергия. Кроме этого, когда человек быстро бежит, длинные ноги быстрее двигаются, а значит, при столкновении с препятствием удар будет сильнее, чем у людей с короткими ногами, которые двигаются с той же линейной скоростью.
В гимнастике, фигурном катании и нырянии также используют угловую скорость. Если спортсмен знает угловую скорость, то легко вычислить количество переворотов и других акробатических трюков во время прыжка. Во время кувырков спортсмены обычно прижимают ноги и руки как можно ближе к корпусу, чтобы уменьшить инерцию и увеличить ускорение, а значит и угловую скорость. С другой стороны, во время ныряния или приземления, судьи смотрят, как ровно спортсмен приземлился. На высокой скорости трудно регулировать направление полета, поэтому спортсмены специально замедляют угловую скорость, немного вытягивая от корпуса руки и ноги.
Спортсмены, которые занимаются метанием диска или молота, тоже контролируют линейную скорость с помощью угловой. Если просто бросить молот, не вращая его по кругу на длинной стальной проволоке, увеличивающей линейную скорость, то бросок будет не таким сильным, поэтому молот сначала раскручивают. Олимпийские спортсмены поворачиваются вокруг своей оси от трех до четырех раз, чтобы увеличить угловую скорость до максимально возможной.
Описывающие вращение физические величины
Для численного описания вращения в физике был введен ряд характеристик. Перечислим их и охарактеризуем.
В первую очередь это угол поворота, обозначается θ. Поскольку полная окружность характеризуется центральным углом в 2*pi радиан, то, зная величину θ, на которую повернулось вращающееся тело за определенный промежуток времени, можно определить число оборотов за это время. Кроме того, угол θ позволяет рассчитать линейный путь, пройденный телом вдоль кривой окружности. Соответствующие формулы для числа оборотов n и пройденного пути L имеют вид:
Где r — радиус окружности или радиус вращения.
Следующей характеристикой рассматриваемого типа движения является угловая скорость. Ее обычно обозначают буквой ω. Она измеряется в радианах в секунду, то есть показывает величину угла в радианах, на которые поворачивается вращающееся тело за одну секунду. Для угловой скорости в случае равномерного вращения справедлива формула:
Описывающие вращение физические величины
Для численного описания вращения в физике был введен ряд характеристик. Перечислим их и охарактеризуем.
В первую очередь это угол поворота, обозначается θ. Поскольку полная окружность характеризуется центральным углом в 2*pi радиан, то, зная величину θ, на которую повернулось вращающееся тело за определенный промежуток времени, можно определить число оборотов за это время. Кроме того, угол θ позволяет рассчитать линейный путь, пройденный телом вдоль кривой окружности. Соответствующие формулы для числа оборотов n и пройденного пути L имеют вид:
n = θ/(2*pi);
L = θ*r.
Где r — радиус окружности или радиус вращения.
Следующей характеристикой рассматриваемого типа движения является угловая скорость. Ее обычно обозначают буквой ω. Она измеряется в радианах в секунду, то есть показывает величину угла в радианах, на которые поворачивается вращающееся тело за одну секунду. Для угловой скорости в случае равномерного вращения справедлива формула:
ω = θ/t
Как подключить частотный преобразователь
Если кабель для подключения на 220 В с 1-й фазой, применяется схема «треугольника». Нельзя подключать частотник, если выходной ток выше 50% от номинального значения.
Если кабель питания на три фазы 380 В, то делается схема «звезды». Чтобы проще было подключать питание, предусмотрены контакты и клеммы с буквенными обозначениями.
- Контакты R, S, T предназначены для подключения сети питания по фазам.
- Клеммы U , V , W служат соединением электродвигателя. Для реверса достаточно изменить подключение двух проводов между собой.
В приборе должна быть колодка с клеммой подключения к земле. Подробней, как подключить, здесь.
Циклическая частота вращения (обращения)
Скалярная величина, измеряющая частоту вращательного движения, называется циклической частотой вращения. Это угловая частота, равная не самому вектору угловой скорости, а его модулю. Ещё её именуют радиальной или круговой частотой.
Циклическая частота вращения – это количество оборотов тела за 2*π секунды.
У электрических двигателей переменного тока это частота асинхронная. У них частота вращения ротора отстаёт от частоты вращения магнитного поля статора. Величина, определяющая это отставание, носит название скольжения – S. В процессе скольжения вал вращается, потому что в роторе возникает электроток. Скольжение допустимо до определённой величины, превышение которой приводит к перегреву асинхронной машины, и её обмотки могут сгореть.
Устройство этого типа двигателей отличается от устройства машин постоянного тока, где токопроводящая рамка вращается в поле постоянных магнитов. Большое количество рамок вместил в себя якорь, множество электромагнитов составили основу статора. В трёхфазных машинах переменного тока всё наоборот.
При работе асинхронного двигателя статор имеет вращающееся магнитное поле. Оно всегда зависит от параметров:
- частоты питающей сети;
- количества пар полюсов.
Скорость вращения ротора состоит в прямом соотношении со скоростью магнитного поля статора. Поле создаётся тремя обмотками, которые расположены под углом 120 градусов относительно друг друга.
Задача на определение циклической частоты вращения вала
Угловые частоты вращения содержат полезную информацию, поскольку позволяют рассчитать такие важные физические характеристики, как момент импульса или угловую скорость. Решим такую задачу: известно, что рабочая частота вращения вала составляет 1500 оборотов в минуту. Чему равна циклическая частота для этого вала?
Из единиц измерения, приведенный в условии, понятно, что дана обычная частота μ. Поэтому формула частоты вращения вала циклической имеет вид:
Прежде чем ею пользоваться, следует перевести указанную в условии цифру к стандартным единицам измерения, то есть к обратным секундам. Поскольку вал за минуту делает 1500 оборотов, то за секунду он сделает в 60 раз меньше оборотов, то есть 25. То есть частота его вращения равна 25 Гц. Подставляя это число в записанную выше формулу, получаем значение циклической частоты: f = 157 рад/с.
Период пульсаций и частота
Частота переменного тока может иметь другое название – пульсация. Периодом пульсации называют время единичной пульсации.
Интенсивность циклов
Для электросети с частотой 50 Гц период пульсации составит:
Т = 1/50 = 0,02 с.
При необходимости, зная эту зависимость, можно по времени цикла вычислить частоту.
Опасность разночастотных зарядов
Как постоянный, так и переменный ток при определённых значениях представляет опасность для человека. До 500 В разница в безопасности находится в соотношении 1:3 (42 В постоянного к 120 В переменного).
При значениях выше 500 В это соотношение выравнивается, причём константное электричество вызывает ожоги и электролизацию кожных покровов, изменяющееся – судороги, фибрилляцию и смерть. Тут уже частота пульсации имеет большое значение. Самый опасный интервал частот – от 40 до 60 Гц. Далее с повышением частоты риск поражения уменьшается.
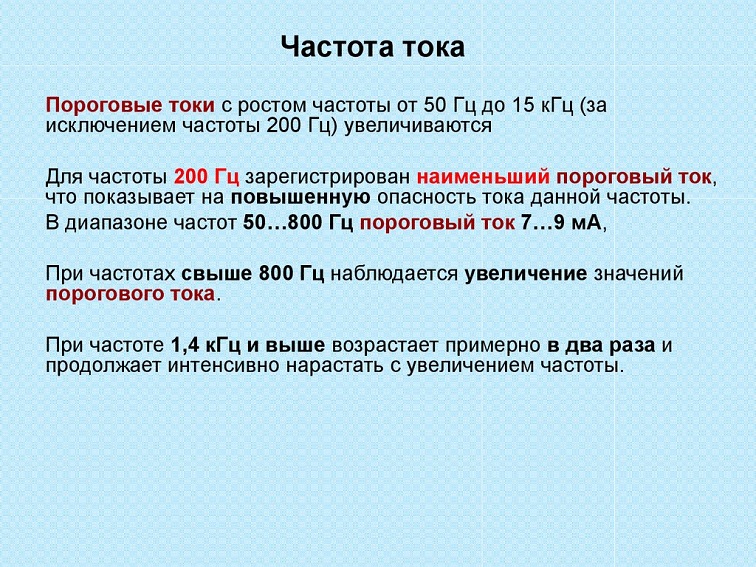 Влияние частоты на пороговый ток
Влияние частоты на пороговый ток
Частота переменного электричества – важный параметр. Она влияет не только на работу электроустановок потребителей, но и на человеческий организм. Изменяя частоту электрических колебаний, можно менять технологические процессы на производстве и качество вырабатываемой энергии.
Генерирование переменного тока
Кроме стандартных генераторов, для производства переменного тока применяются инверторы и фазорасщепители.
Инвертор
Это устройство, с помощью которого из постоянного тока получают его переменный вид. В процессе этого величина выходного напряжения тоже меняется. Схема устройства представляет собой электронный генератор синусоидального импульсного напряжения периодического характера. Есть варианты инверторов, работающих с дискретным сигналом. Инверторы применяют для автономного питания оборудования от аккумуляторов постоянного напряжения.
 Инвертор 12/220 В, мощностью 1500 Вт
Инвертор 12/220 В, мощностью 1500 Вт
Фазорасщепитель
Ещё один способ получить несколько фаз из какого-либо сигнала – это выполнить его расщепление на несколько фаз. Это делается с помощью фазорасщепителя. Принудительная обработка сигналов цифрового или аналогового формата используется, как в радиоэлектронике, так и в силовой электротехнике.
Для электроснабжения трёхфазных асинхронных двигателей применяют выполненный на их же базе фазорасщепитель. Для этого обмотки трёхфазного двигателя соединяют не «звездой», а иначе. Две катушки присоединяют между собой последовательно, третью – подключают к средней точке второй обмотки. Двигатель запускают, как однофазный, после разгона в его третьей обмотке наводится ЭДС.
Интересно. В случае расщепления фаз подобным методом сдвиг фаз между 2 и 3 обмоткой составляет не 1200, как должно быть в идеале, а 900.
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных.
Механические характеристики электродвигателя представляют собой зависимость угловой скорости ω от развиваемого им момента на валу, т.е. ω = f (M). Различают естественные и искусственные механические характеристики электродвигателя.
Естественная механическая характеристика соответствует работе электродвигателя с номинальными параметрами при нормальной схеме включения. Искусственная механическая характеристика соответствует работе электродвигателя с параметрами, отличающимися от номинальных, например, при введении сопротивления, изменении питающего напряжения, частоты и др.

Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся.

Естественная механическая характеристика асинхронного двигателя
Для примера рассмотрим АИР80В2У3.

Номинальная механическая мощность асинхронного электродвигателя
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.

Номинальная активная электрическая мощность асинхронного электродвигателя
Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.

Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Номинальная полная электрическая мощность асинхронного электродвигателя
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.

Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это реактивная мощность Q.
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
Частота вращения ротора асинхронного электродвигателя
На шильдике мы видим, что при питании переменным током частотой в 50 Гц, ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.

Что это значит? Поскольку магнитное поле в обмотках статора создается переменным током частотой 50 Гц, то для двигателя с одной парой полюсов (коим является АИР80В2У3) частота «вращения» магнитного поля, синхронная частота n, оказывается равной 3000 оборотов в минуту, что тождественно 50 оборотам в секунду.
Значение s можно определить, разделив разность синхронной и асинхронной частот на синхронную частоту, и выразив это значение в процентах:
Для нашего примера s = ( (3000 – 2870)/3000 ) *100% = 4,3%.
Угловая скорость асинхронного двигателя

Угловая скорость ω выражается в радианах в секунду. Для определения угловой скорости достаточно частоту вращения ротора n1 перевести в обороты в секунду (f), и умножить на 2 Пи, поскольку один полный оборот составляет 2 Пи или 2*3,14159 радиан. Для двигателя АИР80В2У3 асинхронная частота n1 составляет 2870 оборотов в минуту, что соответствует 2870/60 = 47,833 оборотам в секунду.
Умножая на 2 Пи, имеем: 47,833*2*3,14159 = 300,543 рад/с. Можно перевести в градусы, для этого вместо 2 Пи подставить 360 градусов, тогда для нашего примера получится 360*47,833 = 17220 градусов в секунду. Однако подобные расчеты обычно ведут именно в радианах в секунду. Поэтому угловая скорость ω = 2*Пи*f, где f = n1/60.
Линейная скорость асинхронного электродвигателя

Линейная скорость v относится к оборудованию, на котором асинхронный двигатель установлен в качестве привода. Так, если на вал двигателя установлен шкив или, скажем, наждачный диск, известного радиуса R, то линейная скорость точки на краю шкива или диска может быть найдена по формуле:
Номинальный вращающий момент асинхронного двигателя
Каждый асинхронный электродвигатель характеризуется номинальным вращающим моментом Мн. Вращающий момент М связан с механической мощностью P1 через угловую скорость следующим образом:
Вращающий момент или момент силы, действующей на определенном расстоянии от центра вращения, для двигателя сохраняется, причем с ростом радиуса уменьшается сила, а чем радиус меньше, тем больше сила, поскольку:
Так, чем больше радиус шкива, тем меньшая сила действует на его краю, а наибольшая сила действует непосредственно на валу электродвигателя.

Для приведенного в качестве примера двигателя АИР80В2У3 мощность P1 равна 2200 Вт, а частота n1 равна 2870 оборотов в минуту или f = 47,833 оборота в секунду. Следовательно угловая скорость составляет 2*Пи*f, то есть 300,543 рад/с, и номинальный вращающий момент Мн равен P1/(2*Пи*f). Мн = 2200/(2*3,14159*47,833) = 7,32 Н*м.
Таким образом, исходя из данных, указанных на шильдике асинхронного электродвигателя, можно найти все основные электрические и механические его параметры.
Надеемся, что данная статья помогла вам разобраться в том, как связаны между собой угловая скорость, частота, вращающий момент, активная, полезная и полная мощность, а также КПД электродвигателя.
Источник
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
Формула расчёта скорости асинхронного двигателя
Такие устройства есть двух типов:
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети.
Инжекторные двигатели с плавающими оборотами
Следует отметить, что дроссельный узел часто загрязняется. После чего в дальнейшем происходит нестабильное функционирование оборотов холостого хода. Канал полностью забивается грязью и происходит перекрытие байпасного канала. По мнению профессионалов, дроссельные узлы можно с легкостью разобрать и очистить, то это не представляет особой опасности для устройства.

Если происходит посторонний подсос воздуха, то в датчике отображаются неправильные данные. То есть это, может, привести к убытию или добавлению горючего. Что приводит в заблуждение водителя. Поэтому для выровнения соотношения смеси, проводится полноценная очистка. Таким образом, можно урегулировать соотношение оборотов. Прежде чем осуществляется процесс нормализации подачи воздуха, специалисты осматривают устройство.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Формула расчёта числа оборотов двигателя постоянного тока
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.
-

Сравнение механических характеристик электродвигателей разных типов при ограниченном токе статора
-

Зависимость мощности от скорости вращения вала для двигателей разных типов при ограниченном токе статора


Примечание:
Оранжевый цвет – низкий показатель, желтый цвет – средний показатель, светло-желтый цвет – высокий показатель.
В соответствии с выше приведенными показателями гибридный синхронный электродвигатель, а именно синхронный реактивный электродвигатель со встроенными постоянными магнитами, является наиболее подходящим для применения в качестве тягового электродвигателя в автомобилестроении (выбор проводился для концепта автомобилей BMW i3 & BMW i8). Использование реактивного момента обеспечивает высокую мощность в верхнем диапазоне скоростей. Более того такой двигатель обеспечивает очень высокую эффективность (КПД) в широком рабочем диапазоне [7].
ПРАКТИЧЕСКАЯ РАБОТА №4
РАСЧЁТ ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГАТЕЛЯ
Выполнил: ст. гр. УИТ – 53
Задача 1.
Трехфазный асинхронный двигатель с короткозамкнутым ротором типа АИР 180 М2, используемый в качестве электропривода насосного агрегата консольного типа марки ВК 10/45, предназначенного для перекачивания воды для технических нужд, негорючих и нетоксичных жидкостей, имеет следующие номинальные данные: мощность на валу Р2н
=
30 кВт; скольжение Sн
=
0,025 (2,5%); синхронная частота вращения n1н=3000 об/мин; коэффициент полезного действия ηн= 0,905 (90,5%); коэффициент мощности обмотки статора cos φн=0,88. Известны также: отношение пускового момента к номинальному Мп
/
Мн=1,7; отношение пускового тока к номинальному Iп/Iн=7,5; отношение максимального (критического) вращающего момента к номинальному Мmax/Mн=2,7. Питание двигателя осуществляется от промышленной сети переменного тока 380/220 В, 50 Гц. Требуется определить:
номинальную частоту вращения ротора двигателя;
вращающий номинальный, критический и пусковой моменты двигателя;
мощность, потребляемую двигателем из сети Р1н;
номинальный и пусковой токи;
5)пусковой ток и вращающие моменты, если напряжение в сети снизилось по отношению к номинальному на 5, 10 и 15% (
Uc = 0,95∙Uн; Uc = =0,9∙Uн; Uc = 0,85∙Uн).
1. Номинальная частота вращения:
2. Номинальный вращающий момент на валу:
Мн=9,55∙

3. Пусковой вращающий момент двигателя:
4. Максимальный вращающий момент:
5. Номинальную мощность Р1н, потребляемую двигателем из сети, определим из выражения:
η
н=Р2н/Р1н Р1н= Р2н/ ηн = 30/0,905 = 33,15 кВт;
при этом номинальный ток, потребляемый двигателем из сети, может быть определен из соотношения:
Р1н=
а пусковой ток при этом будет:
6. Определяем вращающий момент при снижении напряжения в сети:
− на 15%. В данном случае U=
0,85∙Uн;
Отметим, что работа на сниженном на 15% напряжении сети допускается, например, у башенных кранов только для завершения рабочих операций и приведения рабочих органов в безопасное положение.
7. Находим, как влияет аналогичное снижение напряжения на пусковой ток двигателя Iп:
− на 5%. Учитывая, что пусковой ток можно приближенно считать пропорциональным первой степени напряжения сети, получим:
Задача 2.
Трёхфазный асинхронный двигатель с короткозамкнутым ротором типа АИР 13256 имеет следующие номинальные данные: мощность на валу Р2н
=
5,5 кВт; скольжение Sн
=
0,04 (4%); синхронная частота вращения n1н=1000 об/мин; коэффициент полезного действия ηн = 0,85 (85%); коэффициент мощности обмотки статора cos φн = 0,8. Известны также: отношение пускового момента к номинальному Мп
/
Мн=2; отношение пускового тока к номинальному Iп/Iн=7; отношение максимального (критического) вращающего момента к номинальному Мmax/Mн=2,2. Питание двигателя осуществляется от промышленной сети переменного тока 380/220 В, 50 Гц.
Определить мощность, потребляемую двигателем из промышленной сети переменного тока 220/380В, 50Гц, ток в цепи статора при включении в сеть 220/380В и 220/127В, номинальные вращающий момент на валу двигателя.
1. Мощность, потребляемая трёхфазным двигателем из сети при номинальном режиме работы:
2. Ток, потребляемый обмоткой статора из сети при соединении обмотки:
− звездой:

− треугольником:

3. Номинальный вращающий момент на валу двигателя.
Сначала найдём номинальную частоту вращения:
Основные характеристики электродвигателей
Номинальный режим электродвигателя соответствует данным, указанным на его щитке (паспорте). В этом режиме двигатель должен удовлетворять требованиям, установленным ГОСТом.
Существует восемь различных режимов работы, из них основными можно считать:
· продолжительный номинальный режим;
· кратковременный номинальный режим с длительностью рабочего периода 10, 30 и 90 мин;
· повторно-кратковременный номинальный режим с продолжительностью включения (ПВ) 15, 25, 40, 60%, с продолжительностью одного цикла не более 10 мин.
Номинальной мощностью Р
н электродвигателя называется указанная на щитке полезная механическая мощность на валу при номинальном режиме работы. Номинальная мощность выражается в Вт или кВт.
Номинальная частота вращения nн
вала электродвигателя называется указанное на щитке число оборотов в минуту, соответствующее номинальному режиму.
Номинальный момент вращения
— момент, развиваемый двигателем на валу при номинальной мощности и номинальной частоте вращения:
где:
М
н — номинальный момент вращения, Н·м (1 кгс·м = 9,81 Н·м ≈ 10 Н·м);
Р
н — номинальная мощность, кВт;
n
н — номинальная частота вращения, об/мин.
Номинальный к.п.д.
hн электродвигателя — отношение его номинальной
мощности к мощности, потребляемой им из сети при номинальном напряжении:
где:
Р
н — номинальная мощность, кВт;
U
н — номинальное (линейное) напряжение, В;
I
н — номинальная сила тока, А;
cosφн — номинальный коэффициент мощности.
Номинальной силой тока
электродвигателя называется сила тока, соответствующая номинальному режиму. Действительное значение силы тока при номинальном режиме может отличаться от указанного на щитке электродвигателя в пределах установленных допусков для к.п.д. и коэффициента мощности.
Максимальный вращающий момент
электродвигателя — наибольший вращающий момент, развиваемый при рабочем соединении обмоток и постепенном повышении момента сопротивления на валу сверх номинального при условии, что напряжение на зажимах двигателя и частота переменного тока остаются неизменными и равными номинальным значениям.
Начальный пусковой вращающий момент
электродвигателя — момент вращения его при неподвижном роторе, номинальных значениях напряжения и частоты переменного тока и рабочем соединении обмоток.
Минимальным вращающим моментом
электродвигателя в процессе пуска называется наименьший вращающий момент, развиваемый двигателем при рабочем соединении обмоток и частоте вращения в пределах от нуля до значения, соответствующего максимальному вращающему моменту (напряжение на зажимах двигателя и частота переменного тока должны оставаться неизменными и равными их номинальным значениям).
Номинальная частота вращения
вала электродвигателя является следующим за мощностью параметром, от которого в значительной мере зависят конструктивное оформление, габариты, стоимость и экономичность работы электропривода. Наиболее приемлемыми в диапазоне мощностей от 0,6 до 100 кВт являются частоты вращения 3000, 1500 и 1000 об/мин (синхронные). Электродвигатели с частотой вращения 750 об/мин (восьмиполюсные) малых мощностей имеют низкие энергетические показатели. При одинаковой мощности электродвигатели с более высокой частотой вращения имеют более высокие значения к.п.д. и cosφ, а также меньшие размеры и массу, что определяет их меньшую стоимость.
Сила тока холостого хода I
0 в значительной мере определяется силой намагничивающего тока
I
0Р. приближенно можно считать
I
0 =
I
0P . Для машин
основного исполнения относительное значение силы тока холостого хода
I
0 = (0,2—0,6)
I
н (оно тем больше, чем меньше номинальная частота вращения и мощность электродвигателя). Зависимость тока холостого хода от частоты вращения электродвигателя приведена в таблице 2.1.
Таблица 2.1. Токи холостого хода для двигателей основного исполнения
| Мощность, кВт | Среднее значение токов холостого хода
(в долях от силы номинального тока) при синхронной частоте вращения, об/мин |
||||
| 3000 | 1500 | 1000 | 750 | 600 | |
| 0,5—1 | 0,4 | 0,55 | 0,6 | — | — |
| 1,1—5 | 0,35 | 0,5 | 0,55 | 0,6 | — |
| 5,1—10 | 0,25 | 0,45 | 0,5 | 0,55 | 0,6 |
| 10,1—25 | 0,2 | 0,4 | 0,45 | 0,5 | 0,55 |
| 25,1—50 | 0,18 | 0,35 | 0,4 | 0,45 | 0,5 |
Если известны номинальный коэффициент мощности и кратность максимального момента mк
, то сила тока холостого хода при номинальном напряжении
I
1н — ток статора при номинальной нагрузке, А.
При номинальных напряжениях и частоте переменного тока сила тока холостого хода от изменения нагрузки практически не зависит. Определить из опыта I
0 нетрудно, если электродвигатель не соединен с рабочей машиной. По значению
I
0 можно в известной мере судить о состоянии электродвигателя, в частности после его ремонта.
К.п.д. электродвигателя при различной степени нагрузки
с достаточной для практических расчетов точностью определяют по формуле:
— коэффициент потерь, представляющих собой отношение постоянных потерь к переменным при номинальной нагрузке.
К постоянным потерям
, практически не зависящим от нагрузки, относятся механические потери, и потери в стали, к переменным — электрические потери в обмотках, зависящие от силы тока нагрузки, и добавочные потери — не учтенные ранее перечисленными видами потерь. Постоянные потери в значительной степени зависят от числа полюсов двигателя и его мощности.
Переменные потери
при номинальной нагрузке определяют с помощью каталожных данных, приведенных в таблице 2.2.
где:
Р
н — номинальная мощность двигателя;
ΔР
н — полные потери двигателя при полной нагрузке;
ΔР
0 — постоянные потери (Δ
m
0= Δ
m
мех + Δ
m
–).
Таблица 2.2. Усредненное значение постоянных потерь мощности, рекомендуемое для практических расчетов
| Число полюсов | Номинальная мощность Рн, кВт | Механические потери DРмех, %Рн | Потери в стали DРс, %Рн | |||
| в пределах | рекомендуемые при расчетах для электродвигателей типов | в пределах | рекомендуемые при расчетах | |||
| А2 | АО2 | |||||
| 2 | 10
40 |
0,7—4,9 | 0,9 | 3,4 | 3,1—3,9
2,0—2,9 |
3,5
2,5 |
| 4 | 10
40 |
0,4—1,4 | 0,5 | 0,9 | 3,0—5,6
2,2—3,4 |
4,3
2,8 |
| 6 | 10
40 |
0,32—0,82 | 0,44 | 0,6 | 3,0—6,0
2,1—3,0 |
4,5
2,6 |
| 8 | 10
40 |
0,25—0,62 | 0,3 | 0,45 | 3,5—4,8
2,0—3,3 |
4,2
2,6 |
При наличии кривой к.п.д. в функции нагрузки касательная к этой кривой в начальной точке отсекает на горизонтали, проведенной на уровне η + 1, отрезок р
0, равный в масштабе абсцисс постоянным потерям (рис. 2).
Коэффициент мощности cosφ1 существенно зависит от реактивной мощности, потребляемой из сети, и степени нагрузки двигателя. Реактивная мощность, потребляемая из сети,
где:
Q’
p,
q
1,
q
2— реактивная мощность, расходуемая на образование соответственно основного магнитного поля двигателя, полей рассеивания обмоток статора и ротора. Основную часть реактивной мощности составляет мощность
Q’
p которая из-за наличия воздушного зазора значительно больше, чем в трансформаторах, и определяет относительно большое значение намагничивающего тока:
I
0 = (0,2—0,6)
I
н .
Обычно у трехфазных асинхронных электродвигателей при номинальной нагрузке cosφ1н= 0,7—0,92. Большие значения коэффициента мощности относятся к мощным двигателям с числом полюсов 2p
= 2 и 4. При уменьшении нагрузки cosφ1 уменьшается до значения cosφ10 ≈ 0,09—0,18 при холостом ходе. Средние значения cosφ и к.п.д. трехфазных электродвигателей даны в таблице 2.3.
Рис. 2. Изменение к.п.д. асинхронного электродвигателя
в зависимости от нагрузки на валу
Таблица 2.3. Практические пределы значений к.п.д. и cos
j
трехфазных асинхронных двигателей основного исполнения
| Мощность, кВт | Синхронная частота вращения, об/мин | К.п.д. | cosφ |
| 0,8—1,1 | 3000 | 0,78—0,795 | 0,86—0,87 |
| 0,6—1,1 | 1500 | 0,72—0,78 | 0,76—0,8 |
| 0,4—1,1 | 1000 | 0,68—0,76 | 0,65—73 |
| 1,5—7,5 | 3000 | 0,805—0,87 | 0,88—0,89 |
| 1500 | 0,80—0,885 | 0,81—0,87 | |
| 1000 | 0,79—0,87 | 0,75—0,82 | |
| 2,2—7,5 | 750 | 0,795—0,865 | 0,69—0,81 |
| 10—22 | 3000 | 0,88—0,89 | 0,88—0,9 |
| 1500 | 0,885—0,9 | 0,87—0,9 | |
| 1000 | 0,87—0,9 | 0,86—0,9 | |
| 750 | 0,87—0,9 | 0,79—0,84 | |
| 30—55 | 3000 | 0,89—0,91 | 0,9—0,92 |
| 1500 | 0,905—0,925 | 0,88—0,92 | |
| 1000 | 0,9—0,925 | 0,88—0,92 | |
| 750 | 0,9—0,925 | 0,84—0,9 |
Для к.п.д. и коэффициента мощности допускаются следующие отклонения: к.п.д. (η) машин мощностью до 50 кВт включительно: –0,15 (1 – η);
к.п.д. машин мощностью свыше 50 кВт: –0,1(1 – η);
коэффициента мощности (cosφ):
, но не менее 0,02 и не более 0,07 по абсолютному значению.
Скольжение
при номинальной нагрузке трехфазных асинхронных электродвигателей основного исполнения обычно составляет от 1,5 до 6,6%. Большие значения скольжения относятся к меньшим значениям мощности двигателя (табл. 2.4). Требование малой
Sн
связано с получением высокого к.п.д. и приводит к необходимости иметь малое активное сопротивление обмотки ротора.
Таблица 2.4. Частота вращения ротора трехфазного асинхронного электродвигателя основного исполнения при номинальной нагрузке и стандартной частоте тока 50 Гц
| Число полюсов | Частота вращения поля статора (синхронная) nc, об/мин | Частота вращения вала ротора nн |
| 2 | 3000 | 2815—2940 |
| 4 | 1500 | 1400—1470 |
| 6 | 1000 | 930—985 |
| 8 | 750 | 720—740 |
| 10 | 600 | 580—585 |
Примечания
:
1. В таблице приведены данные для двигателей мощностью от 1,1 до 100 кВт.
2. В серии А2 10-полюсные электродвигатели на синхронную частоту вращения 600 об/мин выпускаются с наименьшей мощностью 17 кВт.
3. Двигатели на 12 полюсов и более выполняют преимущественно мощностью выше 100 кВт.
При номинальном значении напряжения и частоты переменного тока скольжение с изменением нагрузки в пределах от холостого хода до номинальной практически изменяется пропорционально нагрузке (для двигателей, имеющих кратность максимального момента mк
≥ 1,6):
S
= b
Sн
,
где:
b — степень загрузки.
При работе электродвигателя с пульсирующей или ударной нагрузкой для
лучшего использования маховых масс целесообразно увеличивать номинальное скольжение. У электродвигателей с повышенным скольжением серии А2 и АО2 номинальное скольжение в зависимости от типоразмера и частоты вращения находится в пределах 6,6—16%.
Критическое скольжение Sк
— величина скольжения, соответствующая максимальному моменту электродвигателя. Может быть определена по каталожным данным из выражений:

где:
m
к — кратность максимального момента;
m
n — кратность начального пускового момента;
S
н — относительное значение номинального скольжения.
Приближенно критическое скольжение
При значениях:
В среднем можно считать Sк
= (4—5)
Sн
.
Начальная скорость нарастания температуры Δτ, °С/с, обмотки статора короткозамкнутых электродвигателей при заторможенном роторе и номинальном напряжении (без учета отдачи тепла)
где:
k
i — кратность начального пускового тока по отношению к номинальному; γ1 — плотность тока (А/мм2) в обмотке статора при номинальной нагрузке;
N
— коэффициент, равный (для медной обмотки) 200, если процесс нарастания температуры начинается при холодном состоянии двигателя, и 145 — при нагретом состоянии двигателя.
При средних величинах k
i = 6—7 и g1 = 5—6 А/мм2 интенсивность нарастания температуры (в нагретом состоянии двигателя) составляет:
Δτ = 5,45—10,6°С/с.
Для трехфазных асинхронных двигателей серии А2 и АО2 при пуске температура обмоток статора нарастает со скоростью не более 7°С/с. В таком случае пребывание двигателя под пусковым током возможно без вреда для изоляции в течение 10—15 с.
Напряжение
трехфазных асинхронных электродвигателей должно соответствовать стандартам на данный вид электрической машины. Электродвигатели серии А2 и АО2 мощностью до 100 кВт выпускаются на напряжение 220 Δ, 380 Y и 500 Y В по требованию.
Трехфазные двигатели сельскохозяйственной серии АО2-СХ мощностью 2,2—10 кВт выпускают на 380 Y и мощностью 13—30 кВт при 1500 об/мин — на 380 Δ В.
Трехфазные двигатели серии 4А мощностью 0,12—0,37 кВт рассчитаны на напряжение 220 Δ, 380 Y, а мощностью 0,55—110 кВт — на 220 Δ, 380 Y и 380 Δ, 660 Y В.
Трехфазные асинхронные электродвигатели серии Д мощностью от 0,25 до 4 кВт основного исполнения поставляют для напряжений 220 Δ, 380 Y В.
На напряжение 380 В изготавливаются асинхронные двигатели мощностью до 400 кВт, поэтому применение напряжений 3 и 6 кВ необходимо только для более мощных двигателей.
Расчет параметров частотного преобразователя для асинхронных двигателей
Количество повторений каких-либо событий или их возникновения за одну единицу таймера называется частотой. Это физическая величина измеряется в герцах – Гц (Hz). Она обозначается буквами ν, f, F, и есть отношение количества повторяющихся событий к промежутку времени, в течение которого они произошли.
Вращение планет вокруг Солнца
При обращении предмета вокруг своего центра можно говорить о такой физической величине, как частота вращения, формула:
В системе СИ обозначается как – с-1 (s-1) и именуется как обороты в секунду (об/с). Применяют и другие единицы вращения. При описании вращения планет вокруг Солнца говорят об оборотах в часах. Юпитер делает одно вращение в 9,92 часа, тогда как Земля и Луна оборачиваются за 24 часа.
Номинальная скорость вращения
Прежде, чем дать определение этому понятию, необходимо определиться, что такое номинальный режим работы какого-либо устройства. Это такой порядок работы устройства, при котором достигаются наибольшая эффективность и надёжность процесса на продолжении длительного времени. Исходя из этого, номинальная скорость вращения – количество оборотов в минуту при работе в номинальном режиме. Время, необходимое для одного оборота, составляет 1/v секунд. Оно называется периодом вращения T. Значит, связь между периодом обращения и частотой имеет вид:
К сведению. Частота вращения вала асинхронного двигателя – 3000 об./мин., это номинальная скорость вращения выходного хвостовика вала при номинальном режиме работы электродвигателя.
Как найти или узнать частоты вращений различных механизмов? Для этого применяется прибор, который называется тахометр.
Прибор для измерения частоты вращения – тахометр Testo 477
Двигатели постоянного тока
Резонансная частота: формула
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Формула расчёта числа оборотов двигателя постоянного тока
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Как запустить мотор с использованием эфира
Ограничитель агрегата ограничивает максимальные обороты копенчатого вала двигателя. Поэтому чтобы запустить двигательно и привести в нормально состояние, необходимо воспользоваться диэтиловым эфиром.
Высокая летучесть концентрата и температура воспламенения отлично реагируют на процесс и помогают в запуске двигателя. Если вы не умеете пользоваться коварным веществом, тогда лучше доверить дело профессионалам, чтобы избежать серьезных последствий.
Скорость сгорания эфира достаточно велика. Поэтому при неправильном применении соотношения, можно вызвать взрывной эффект. Чтобы предотвратить подобные последствия, специалисты пользуются дополнительными компонентам, которые отлично взаимодействуют с эфиром. Если процесс проводится в зимний период, тогда следует подумать об эксплуатации двигателя.
Многие специалисты рекомендуют использовать бензиновый, качественный движок. Чтобы не перезагружать свой бюджет лишними затратами, желательно хорошо подумать обо всех деталях и только после этого подобрать соответствуюбщий автомобиль. Рекомендуемый предмет, позволит передвигаться без лишних затрат.
Угловая скорость
Когда тело движется по окружности, то не все его точки движутся с одинаковой скоростью относительно оси вращения. Если взять лопасти обычного бытового вентилятора, которые вращаются вокруг вала, то точка расположенная ближе к валу имеет скорость вращения больше, чем отмеченная точка на краю лопасти. Это значит, у них разная линейная скорость вращения. В то же время угловая скорость у всех точек одинаковая.
Угловая скорость представляет собой изменение угла в единицу времени, а не расстояния. Обозначается буквой греческого алфавита – ω и имеет единицу измерения радиан в секунду (рад/с). Иными словами, угловая скорость – это вектор, привязанный к оси обращения предмета.
Формула для вычисления отношения между углом поворота и временным интервалом выглядит так:
Обозначение угловой скорости употребляется при изучении законов вращения. Оно употребляется при описании движения всех вращающихся тел.
Формула угловой скорости
Угловая скорость в конкретных случаях
На практике редко работают с величинами угловой скорости. Она нужна при конструкторских разработках вращающихся механизмов: редукторов, коробок передач и прочего.
Вычислить её, применяя формулу, можно. Для этого используют связь угловой скорости и частоты вращения.
В качестве примера могут быть рассмотрены угловая скорость и частота вращения колёсного диска при движении мотоблока. Часто необходимо уменьшить или увеличить скорость механизма. Для этого применяют устройство в виде редуктора, при помощи которого понижают скорость вращения колёс. При максимальной скорости движения 10 км/ч колесо делает около 60 об./мин. После перевода минут в секунды это значение равно 1 об./с. После подстановки данных в формулу получится результат:
ω = 2*π*ν = 2*3,14*1 = 6,28 рад./с.
К сведению. Снижение угловой скорости часто требуется для того, чтобы увеличить крутящий момент или тяговое усилие механизмов.
Шестерёнчатый уменьшитель хода для мотокультиватора
Как определить угловую скорость
Принцип определения угловой скорости зависит от того, как происходит движение по окружности. Если равномерно, то употребляется формула:
Если нет, то придётся высчитывать значения мгновенной или средней угловой скорости.
Величина, о которой идёт разговор, векторная, и при определении её направления используют правило Максвелла. В просторечии – правило буравчика. Вектор скорости имеет одинаковое направление с поступательным перемещением винта, имеющего правую резьбу.
Правило Максвелла для угловой скорости
Рассмотрим на примере, как определить угловую скорость, зная, что угол поворота диска радиусом 0,5 м меняется по закону ϕ = 6*t:
ω = ϕ / t = 6 * t / t = 6 с-1
Вектор ω меняется из-за поворота в пространстве оси вращения и при изменении значения модуля угловой скорости.
Максимальная и номинальная мощность двигателей
В 2010 году европейские и американские производители двигателей прекратили указывать их мощность, ограничившись лишь показателями объема и крутящего момента, выраженного либо в Ньютонах на метр (Н/м) либо в американской системе – футов на фунт (Ft/Lbs). Во втором случае, чтобы получить более привычные для нас единицы, достаточно умножить значение на 1,356. Впрочем, полученные данные все равно не столь очевидны, чтобы сразу сориентироваться в мощности устройства.
Мощность измеряется по формуле P (Вт) = Момент (Н·м) *Частоту вращения (Об/мин) / 9.5492.
Нужно иметь в виду, что максимальная мощность и максимальный момент достигаются при разных оборотах двигателя. Так максимальный момент, как видно из графика, будет на оборотах примерно 2400-2600, а максимальная мощность – при 3600 об/мин. Поэтому, для того, чтобы все-таки узнать на какой мощности у вас работает двигатель, нужно знать, на какие рабочие обороты он настроен, что не все производители указывают. Серьезные компании двигателей указывают для этого график, аналогичный представленному внизу, или конкретные значения мощности, зависящие оборотов. Если у вас есть регулятор оборотов двигателя, значит, максимальная мощность будет на максимальных оборотах.
Этим различием и пользовались производители двигателей: указывая мощность, которую можно получить при завышенных оборотах (например, 5.0 л.с., которую можно достичь при 4500 об/мин), при этом сам двигатель при постоянной работе был настроен на обороты 3600, выдавая всего 3.5 л.с. Численно мощность от оборотов зависит гораздо больше, чем от момента. Надо также понимать, что при завышении оборотов мощность растет, а крутящий момент падает.
Практически это означает, что для косилки, чем больше мощность, тем на большие обороты можно раскрутить нож или на те же обороты, но более длинный/тяжелый нож. Но при этом, если задрать обороты и соответственно уменьшить крутящий момент, то нож сможет преодолевать все меньшее сопротивление. То есть наступает ситуация, что при последующем увеличении оборотов, будет уменьшаться крутящий момент, и двигатель будет раньше глохнуть при увеличении сопротивления (нагрузки) и, значит, хуже будет косить густую траву.
Поэтому с 2010 года чаще всего указывается мощность двигателя, работающего в конкретной технике с учетом ее использования и установленным рабочим числом оборотов. На двигателях же указывается только максимальный крутящий момент, на который и стоит ориентироваться, ведь чем он больше, тем лучше устройство будет справляться со своей задачей.
Все это касается нормальных (брендовых) производителей техники. Сейчас все больше и больше появляется двигателей из Китая, как и от европейских производителей (MTD, Emak, Stiga, Al-Ko и т.д.), так и собственно китайских брендов Zongshen, Loncin, Rato, Lifan и других. Также существует большое количество «заказных» марок сделанных на основе аутсорсинга, то есть владелец бренда заказывает двигатели под собственным названием на заводах в Китае. А тут уже все зависит от добросовестности заказчика/поставщика этих агрегатов. По вашей просьбе и за ваши деньги в Китае вам напечатают любой паспорт и наклейки с любыми цифрами. Поэтому, покупая культиватор/косилку с гордой надписью 7-8 л.с. с китайским мотором, вы можете получить двигатель реальной мощности 4-5 л.с. Но так как в России потребитель в первую очередь выбирает технику по мощности, то наша компания, по возможности, указывает для бензиновой техники с четырехтактными двигателями две мощности: максимальную — завышенная мощность, которую указывали до 2010 года и продолжают указывать некоторые производители/продавцы для увеличения привлекательности своего товара, и номинальную (реальную). Но номинальную мощность, к сожалению, указывают не все производители или указывают завышенную, выдавая ее за номинальную. При этом этот параметр можно замерить только в заводских условиях, поэтому не во всех товарах есть возможность указать данную характеристику.
Также мы рекомендуем в первую очередь обращать внимание на крутящий момент и объем двигателя. Учитывая, что двигатели на садовой технике сконструированы достаточно просто (нет никакого турбо наддува, форсажа и т.д.), то с одного объема невозможно снять больше мощности на 30-50 %.
Источник
Угол поворота и период обращения
Рассмотрим точку А на предмете, вращающимся вокруг своей оси. При обращении за какой-то период времени она изменит своё положение на линии окружности на определённый угол. Это угол поворота. Он измеряется в радианах, потому что за единицу берётся отрезок окружности, равный радиусу. Ещё одна величина измерения угла поворота – градус.
Сопротивление тока: формула
Когда в результате поворота точка А вернётся на своё прежнее место, значит, она совершила полный оборот. Если её движение повторится n-раз, то говорят о некотором количестве оборотов. Исходя из этого, можно рассматривать 1/2, 1/4 оборота и так далее. Яркий практический пример этому – путь, который проделывает фреза при фрезеровании детали, закреплённой в центре шпинделя станка.
Направление вращения электродвигателя
Чтобы механизмы на производстве или в быту, будь-то дерево или металлообрабатывающие станки, консольный насос, конвейерная лента, кран-балка, заточной станок, электрическая газонокосилка, кормоизмельчитель или другое устройство работали без поломок, необходимо, в первую очередь, чтобы вал электродвигателя вращался в правильную сторону.
Во избежание ошибок и не допуска вращения вала механизма в противоположную сторону согласно пункту 2.5.3 «Правил технической эксплуатации электроустановок потребителей» на корпусе самого механизма и приводном двигателе должны быть нанесены стрелки направления вращения электродвигателя.
Направление вращения вала электродвигателя
Определение направления вращения электродвигателя выполняется со стороны единственного конца вала. В том случае если двигатель имеет два конца вала, то вращение определяют со стороны вала, который имеет больший диаметр. Согласно ГОСТ 26772-85 правому направлению соответствует движение вала по часовой стрелке. У наиболее распространенных трехфазных двигателей с короткозамкнутым ротором вращение вала в правую сторону будет осуществляться, если последовательность фаз, по которым подается напряжение на концы обмоток статора, будет соответствовать алфавитной последовательности их маркировки – U1, V1, W1.
Для однофазных двигателей с короткозамкнутым ротором вращение вала по часовой стрелке будет выполняться при условии, когда фаза будет подаваться на конец рабочей обмотки.
Изменение направления вращения вала в трехфазных электродвигателях
Эксплуатация некоторых механизмов требует левостороннего вращения вала. Зная, как изменить направление вращения электродвигателя, это можно сделать без какой-либо доработки или переделки самого приводного двигателя. Для смены направления движения нужно:
Левостороннее вращение
Если эксплуатация двигателя требует постоянного переключения двигателя с правостороннего вращения на левостороннее, его подключение осуществляют по специальной схеме,
которая подробно описана в статье «Схема подключения электродвигателя через контактор».
Реверс однофазного электродвигателя
Запустить вращение однофазного асинхронного электродвигателя можно переподключив фазу на начало рабочей обмотки.
Зная, как поменять направление вращения электродвигателя, можно подключить однофазный электродвигатель с возможностью переключения правостороннего вращения на левостороннее с помощью трехконтактного переключателя.
Области применения электродвигателей
Электродвигатели являются крупнейшими потребителями электроэнергии в мире, на них приходится около 45% от всей потребляемой электроэнергии.
- Электродвигатели используются повсеместно, основные области применения:
- промышленность: насосы, вентиляторы, компрессоры, конвейеры, движущая сила для других машин и др.
- строительство: насосы, вентиляторы, конвейеры, лифты, системы отопления, вентиляции и кондиционирование воздуха и др.
- потребительские устройства: холодильники, кондиционеры, персональные компьютеры и ноутбуки (жесткие диски, вентиляторы), пылесосы, стиральные машинки, миксеры и др.
| ЭД1 | Функции | Области применения |
| Вращающиеся электродвигатели | Насосы | Системы водоснабжения и водоотведения |
| Системы перекачки охлажденной или нагретой воды, системы отопления, ОВК2, системы полива | ||
| Системы канализации | ||
| Перекачка нефтепродуктов | ||
| Вентиляторы | Приточно-вытяжная вентиляция, ОВК2, вентиляторы | |
| Компрессоры | Системы вентиляции, холодильные и морозильные установки, ОВК2 | |
| Накопление и распределение сжатого воздуха, пневматические системы | ||
| Системы сжижения газа, системы перекачки природного газа | ||
| Вращение, смешивание, движение | Прокатный стан, станки: обработка металла, камня, пластика | |
| Прессовое оборудование: обработка алюминия, пластиков | ||
| Обработка текстиля: ткачество, стирка, сушка | ||
| Смешивание, взбалтывание: еда, краски, пластики | ||
| Транспорт | Пассажирские лифты, эскалаторы, конвейеры | |
| Грузовые лифты, подъемные краны, подъемники, конвейеры, лебедки | ||
| Транспортные средства: поезда, трамваи, троллейбусы, автомобили, электромобили, автобусы, мотоциклы, велосипеды, зубчатая железная дорога, канатная дорога | ||
| Угловые перемещения (шаговые двигатели, серводвигатели) | Вентили (открыть/закрыть) | |
| Серво (установка положения) | ||
| Линейные электродвигатели | Открыть/закрыть | Вентили |
| Сортировка | Производство | |
| Хватать и перемещать | Роботы |
Примечание:
- ЭД – электродвигатель
- ОВК – системы отопления, вентиляции и кондиционирование воздуха
Циклическая частота вращения (обращения)
Что нужно знать об индукционных счётчиках
Скалярная величина, измеряющая частоту вращательного движения, называется циклической частотой вращения. Это угловая частота, равная не самому вектору угловой скорости, а его модулю. Ещё её именуют радиальной или круговой частотой.
Циклическая частота вращения – это количество оборотов тела за 2*π секунды.
У электрических двигателей переменного тока это частота асинхронная. У них частота вращения ротора отстаёт от частоты вращения магнитного поля статора. Величина, определяющая это отставание, носит название скольжения – S. В процессе скольжения вал вращается, потому что в роторе возникает электроток. Скольжение допустимо до определённой величины, превышение которой приводит к перегреву асинхронной машины, и её обмотки могут сгореть.
Устройство этого типа двигателей отличается от устройства машин постоянного тока, где токопроводящая рамка вращается в поле постоянных магнитов. Большое количество рамок вместил в себя якорь, множество электромагнитов составили основу статора. В трёхфазных машинах переменного тока всё наоборот.
При работе асинхронного двигателя статор имеет вращающееся магнитное поле. Оно всегда зависит от параметров:
Скорость вращения ротора состоит в прямом соотношении со скоростью магнитного поля статора. Поле создаётся тремя обмотками, которые расположены под углом 120 градусов относительно друг друга.
Регулирование скорости вращения асинхронных электродвигателей путем переключения числа пар полюсов
В различных отраслях промышленности имеется очень много различных производственных механизмов, которые выполняют ограниченное количество операций, не требующих плавного регулирования скорости вращения и способных удовлетвориться лишь ограниченным числом скоростей. К числу подобных машин относят деревообрабатывающие и металлорежущие станки, лебедки нефтяных скважин, центробежные сепараторы и другие механизмы. Ограниченное количество скоростей вращение вполне может быть обеспечено многоскоростными короткозамкнутыми асинхронными электродвигателями. При этом возможны две конструкции электродвигателей: с несколькими обмотками на статоре, уложенными в одни и те же пазы, или с одной обмоткой, допускающей переключение ее для получения различного числа пар полюсов.
Взаимодействие МДС ротора и статора возможно только при условии равного количества пар полюсов обмоток статора и ротора. Поэтому изменяя количество пар полюсов статорной обмотки необходимо не забывать изменять количество пар полюсов и на обмотке ротора. Если рассматривать асинхронную машину с фазным ротором, то для выполнения этого условия необходимо наличие дополнительных контактных колец, что сильно увеличивает габариты и стоимость электрической машины. Короткозамкнутый ротор с беличьей клеткой обладает очень ценным свойством автоматического образования числа пар полюсов, равному числу пар полюсов МДС обмотки статора. Именно это свойство и обусловило использование именно короткозамкнутых роторов в многоскоростных асинхронных электродвигателях.
Многоскоростные двигатели с несколькими независимыми обмотками на статоре по экономическим и техническим показателям уступают однообмоточным. В многообмоточных машинах плохо используется обмотка статора, нецелесообразно заполнение паза статора, значения КПД и cos φ ниже оптимальных. Поэтому в последние временя большее распространение получили многоскоростные однообмоточные электрические машины с переключением на различное число пар полюсов. Суть данного способа заключается в том, что путем переключения направления тока в части обмотки изменяют распределение магнитодвижущей силы внутри расточки статора, результатом чего становится изменение скорости вращения магнитодвижущей силы, а следовательно, и магнитного потока в пространстве. Наиболее часто осуществляют переключения в соотношении 1:2. В этом случае обмотки каждой фазы выполняются в виде двух секций. Изменение направления тока в одной из них позволяет получить изменение числа пар полюсов в 2 раза. Рассмотрим это применительно к двигателю, переключаемому на 8 и 4 полюса.
На рисунке ниже для простоты изображена обмотка одной фазы, состоящей из двух секций:
При последовательном соединении секций, то есть при соединении конца первой секции 1К с началом второй 2Н, получаем 8 полюсов или 4 пары. Если поменять направление тока во второй секции на обратное, то число полюсов, образуемое обмоткой, уменьшится в 2 раза. Изменение направления тока во второй секции может быть осуществлено путем разрыва перемычки между 1К – 2К. Количество образовавшихся при этом полюсов указано на рисунке б).
Такое же изменение числа полюсов можно получить, осуществив изменение направления тока во второй секции путем параллельного включения с первой (рисунок в)). В этом случае, точно также как и в предыдущем, обмотка образует 4 полюса, что соответствует вдвое большей скорости вращения электрической машины.
При сопоставлении схем обмоток многоскоростных электродвигателей предпочтение должно отдаваться схемам, обеспечивающим нужный характер зависимости допустимого по нагреву момента от скорости и имеющим наименьшее количество выводов и контактов.
Одним из распространенных в природе и технике видов движения является вращение. Этот вид перемещения тел в пространстве характеризуется набором физических величин. Важная характеристика любого вращения — это частота. Формулу частоту вращения можно найти, зная определенные величины и параметры.
Что такое вращение?

Под ним в физике понимают такое перемещение материальной точки вокруг некоторой оси, при котором ее расстояние до этой оси остается постоянным. Оно называется радиусом вращения.
 Вам будет интересно:Образовательная среда образовательного учреждения: общая информация, особенности и требования
Вам будет интересно:Образовательная среда образовательного учреждения: общая информация, особенности и требования
Примерами этого движения в природе является вращение планет вокруг Солнца и вокруг собственной оси. В технике вращение представлено движением валов, шестеренок, колеса автомобиля или велосипеда, перемещением лопастей ветровых мельниц.
Описывающие вращение физические величины
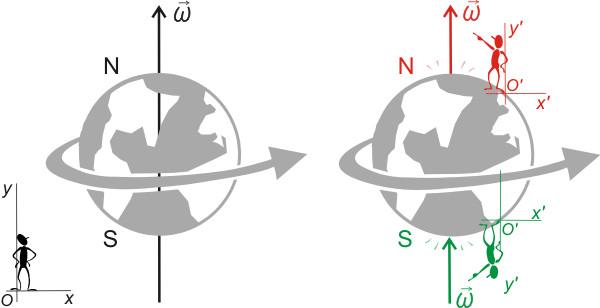
Для численного описания вращения в физике был введен ряд характеристик. Перечислим их и охарактеризуем.
В первую очередь это угол поворота, обозначается θ. Поскольку полная окружность характеризуется центральным углом в 2*pi радиан, то, зная величину θ, на которую повернулось вращающееся тело за определенный промежуток времени, можно определить число оборотов за это время. Кроме того, угол θ позволяет рассчитать линейный путь, пройденный телом вдоль кривой окружности. Соответствующие формулы для числа оборотов n и пройденного пути L имеют вид:
n = θ/(2*pi);
L = θ*r.
Где r — радиус окружности или радиус вращения.
Следующей характеристикой рассматриваемого типа движения является угловая скорость. Ее обычно обозначают буквой ω. Она измеряется в радианах в секунду, то есть показывает величину угла в радианах, на которые поворачивается вращающееся тело за одну секунду. Для угловой скорости в случае равномерного вращения справедлива формула:
ω = θ/t
Угловая частота, период и угловая скорость
Выше уже отмечалось, что важным свойством любого вращательного движения является время, за которое совершается один оборот. Это время называется периодом вращения. Его обозначают буквой T и измеряют в секундах. Формулу для периода T можно записать через угловую скорость ω. Соответствующее выражение имеет вид:
T = 2*pi/ω
Величина, обратная периоду, называется частотой. Ее измеряют в герцах (Гц). Для кругового движения удобно использовать не саму частоту, а ее угловой аналог. Обозначим ее f. Формула частоты вращения угловой f имеет вид:
f = 2*pi/T
Чтобы рассчитать угловую частоту, необходимо знать период вращательного движения.
Сравнивая две последние формулы, приходим к следующему равенству:
f = ω
Это равенство означает следующее:
- формулы угловой частоты и угловой скорости совпадают, поэтому эти величины равны численно между собой;
- так же как и скорость, частота показывает, на какой угол в радианах поворачивается тело за одну секунду.
Различие между этими величинами единственное: угловая частота является величиной скалярной, скорость же — это вектор.
Линейная скорость вращения, частота и частота угловая
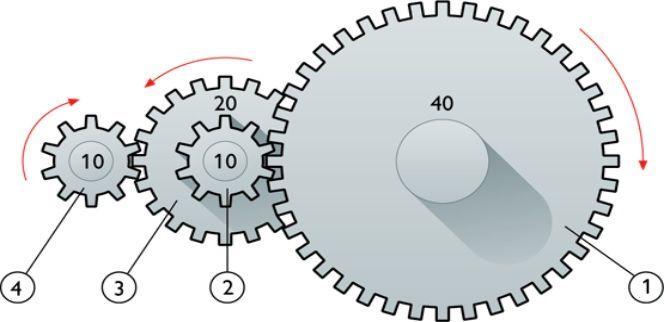
В технике для некоторых вращающих конструкций, например, шестерен и валов, известны их рабочие частоты μ и линейные скорости v. Тем не менее каждую из этих характеристик можно использовать для определения угловой или циклической частоты.
Выше отмечалось, что частота μ измеряется в герцах. Она показывает количество оборотов вращающегося тела за одну секунду. Формула для нее принимает вид:
μ = 1/T
Если сравнить это выражение с соответствующим равенством для f, то формула, как найти частоту вращения f через μ описывающая, будет иметь вид:
f = 2*pi*μ
Эта формула интуитивно понятна, поскольку μ показывает количество оборотов за единицу времени, а f отражает ту же самую величину, только представленную в радианах.
Линейная скорость v связана со скоростью угловой ω следующим равенством:
v = ω*r
Поскольку модули величин f и ω равны, то из последнего выражения легко получить соответствующую формулу частоты вращения циклической. Запишем ее:
f = v/r
Где r — радиус вращения. Заметим, что скорость v линейно растет при увеличении радиуса r, при этом отношение этих величин является константой. Последнее умозаключение означает, что если измерять циклическую частоту вращения в любой точке сечения вращающегося массивного объекта, то она будет везде одинаковой.
Задача на определение циклической частоты вращения вала
Угловые частоты вращения содержат полезную информацию, поскольку позволяют рассчитать такие важные физические характеристики, как момент импульса или угловую скорость. Решим такую задачу: известно, что рабочая частота вращения вала составляет 1500 оборотов в минуту. Чему равна циклическая частота для этого вала?
Из единиц измерения, приведенный в условии, понятно, что дана обычная частота μ. Поэтому формула частоты вращения вала циклической имеет вид:
f = 2*pi*μ
Прежде чем ею пользоваться, следует перевести указанную в условии цифру к стандартным единицам измерения, то есть к обратным секундам. Поскольку вал за минуту делает 1500 оборотов, то за секунду он сделает в 60 раз меньше оборотов, то есть 25. То есть частота его вращения равна 25 Гц. Подставляя это число в записанную выше формулу, получаем значение циклической частоты: f = 157 рад/с.