Принцип действия электродвигателя.
Электродвигатель – это просто устройство для эффективного преобразования электрической энергии в механическую.
В основе этого преобразования лежит магнетизм. В электродвигателях используются постоянные магниты и электромагниты, кроме того, используются магнитные свойства различных материалов, чтобы создавать эти удивительные устройства.
Существует несколько типов электродвигателей. Отметим два главных класса: AC и DC.
Электродвигатели класса AC (Alternating Current) требуют для работы источник переменного тока или напряжения (такой источник Вы можете найти в любой электрической розетке в доме).
Электродвигатели класса DC (Direct Current) требуют для работы источник постоянного тока или напряжения (такой источник Вы можете найти в любой батарейке).
Универсальные двигатели могут работать от источника любого типа.
Не только конструкция двигателей различна, различны способы контроля скорости и вращающего момента, хотя принцип преобразования энергии одинаков для всех типов.
Устройство и принцип работы простейшего электродвигателя.
В основе конструкции электрического двигателя лежит эффект, обнаруженный Майклом Фарадеем в 1821 году: что взаимодействие электрического тока и магнита может вызывать непрерывное вращение. Один из первых двигателей, нашедших практическое применение, был двигатель Бориса Семеновича Якоби (1801 –1874), приводивший в движение катер с 12 пассажирами на борту. Однако для широкого использования электродвигателя необходим был источник дешевой электроэнергии — электромагнитный генератор.
Принцип работы электродвигателя очень прост: вращение вызывается силами магнитного притяжения и отталкивания, действующими между полюсами подвижного электромагнита (ротора) и соответствующими полюсами внешнего магнитного поля, создаваемого неподвижным электромагнитом (или постоянным магнитом) — статором.
Вращающаяся часть электрической машины называется ротором (или якорем), а неподвижная — статором. В простом электродвигателе постоянного тока блок катушки служит ротором, а постоянный магнит — статором.
Сложность заключается в том, чтобы добиться непрерывного вращения двигателя. А для этого надо сделать так, чтобы полюс подвижного электромагнита, притянувшись к противоположному полюсу статора, автоматически менялся на противоположный — тогда ротор не замрет на месте, а повернется дальше — по инерции и под действием возникшего в этот момент отталкивания.
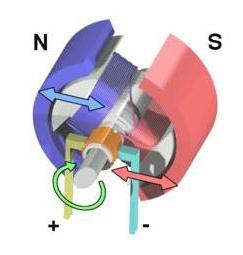
Для автоматического переключения полюсов ротора служит коллектор. Он представляет собой пару закрепленных на валу ротора пластин, к которым подключены обмотки ротора. Ток на эти пластины подается через токоснимающие контакты (щетки). При повороте ротора на 180° пластины меняются местами — это автоматически меняет направление тока и, следовательно, полюсы подвижного электромагнита. Так как одноименные полюсы взаимно отталкиваются, катушка продолжает вращаться, а ее полюсы притягиваются к соответствующим полюсам на другой стороне магнита.
Простейший электродвигатель
Простейший электродвигатель работает только на постоянном токе (от батарейки). Ток проходит по рамке, расположенной между полюсами постоянного магнита. Взаимодействие магнитных полей рамки с током и магнита заставляет рамку поворачиваться. После каждого полуоборота коллектор переключает контакты рамки, подходящие к батарейке, и поэтому рамка вращается.
В некоторых двигателях для создания магнитного поля вместо постоянного магнита служит электромагнит. Витки проволоки такого электромагнита называются обмоткой возбуждения.
Электродвигатели используются повсюду. Даже дома вы можете обнаружить огромное количество электродвигателей. Электродвигатели используются в часах, в вентиляторе микроволновой печи, в стиральной машине, в компьютерных вентиляторах, в кондиционере, в соковыжималке и т. д. и т. п. Ну а электродвигатели, применяемые в промышленности, можно перечислять бесконечно. Диапазон физических размеров – от размера со спичечную головку до размера локомотивного двигателя.
Показанный ниже промышленный электродвигатель работает и на постоянном, и на переменном токе. Его статор – это электромагнит, создающий магнитное поле. Обмотки двигателя поочередно подключаются через щетки к источнику питания. Одна за другой они поворачивают ротор на небольшой угол, и ротор непрерывно вращается.
Промышленный электродвигатель
Электроизмерительные приборы.
Электроизмерительные приборы — класс устройств, применяемых для измерения различных электрических величин.
Группа электромагнитных приборов является наиболее распространенной. Принцип их действия, использованный впервые еще Ф. Кольраушем в 1884 году, основан на перемещении подвижной железной части под влиянием магнитного потока, создаваемого катушкой, по которой пропускается ток. Практическое осуществление этого принципа отличается разнообразием.
Ориентирующее действие магнитного поля на контур с током используют в электроизмерительных приборах магнитоэлектрической системы – амперметрах, вольтметрах и др.
Устройство прибора магнитоэлектрической системы
Измерительный прибор магнитоэлектрической системы устроен следующим образом.
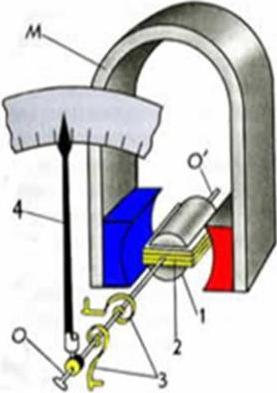
Берут лёгкую алюминиевую рамку 2 прямоугольной формы, наматывают на неё катушку из тонкого провода. Рамку крепят на двух полуосях О и О’, к которым прикреплена также стрелка прибора 4. Ось удерживается двумя тонкими спиральными пружинами 3. Силы упругости пружин, возвращающие рамку к положению равновесия в отсутствие тока, подобраны такими, чтобы были пропорциональными углу отклонения стрелки от положения равновесия. Катушку помещают между полюсами постоянного магнита М с наконечниками формы полого цилиндра. Внутри катушки располагают цилиндр 1 из мягкого железа. Такая конструкция обеспечивает радиальное направление линий магнитной индукции в области нахождения витков катушки (см рисунок).
В результате при любом положении катушки силы, действующие на нее со стороны магнитного поля, максимальны и при неизменной силе тока постоянны. Векторы F и –F изображают силы, действующие на катушку со стороны магнитного поля и поворачивающие ее. Катушка с током поворачивается до тех пор, пока силы упругости со стороны пружины не уравновесят силы, действующие на рамку со стороны магнитного поля. Увеличивая силу тока в рамке в 2 раза, рамка повернётся на угол, вдвое больший. Это происходит потому, что Fm~I.
Силы, действующие на рамку с током прямо пропорциональны силе тока, то есть можно, проградуировав прибор, измерять силу тока в рамке.
Точно так же можно прибор настроить на измерение напряжения в цепи, если проградуировать шкалу в вольтах, причём сопротивление рамки с током должно быть выбрано очень большим по сравнению с сопротивлением участка цепи, на котором измеряем напряжение.
Дополнительные материалы.
1. Видео-ролик «Принцип работы электродвигателя»
2. Презентация «Электроизмерительные приборы» скачать с Яндекса
Медиа-материалы из Единой коллекции Цифровых Образовательных Ресурсов:
Содержание:
Электродвигатель:
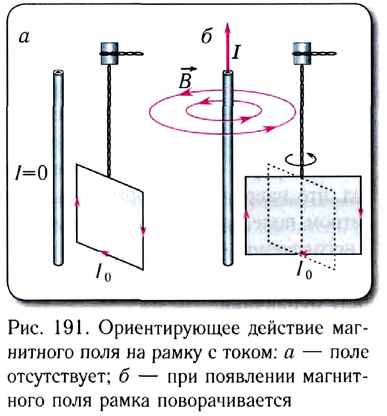
Сила Ампера используется в электрических двигателях постоянного тока для преобразования энергии электрического тока в механическую энергию вращения вала. Принцип действия такого двигателя основан на явлении вращения контура с током под действием магнитного поля (рис. 191).
Рассмотрим силы, действующие на рамку с током силой I, помещенную в однородное магнитное поле индукцией 
Силы, действующие на противоположные стороны AD и ВС рамки, лежат в плоскости рамки и стремятся ее растянуть (при изменении направления тока эти силы будут сжимать рамку).
Силы, действующие на стороны АВ и CD (рис. 192. б), равны по модулю и
противоположны по направлению. Поэтому на рамку действует момент сил

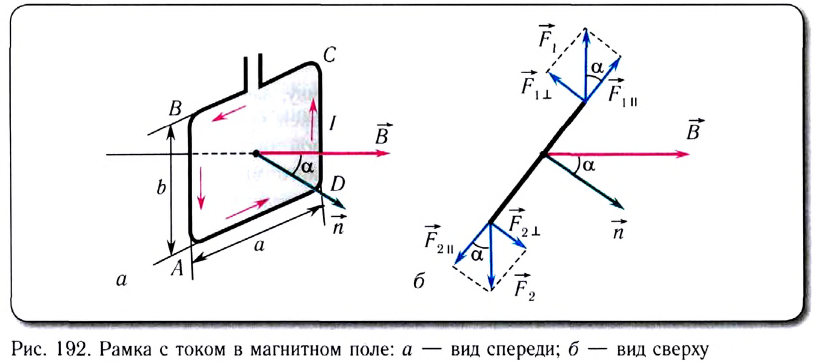
где а, b — длины сторон рамки, S — ее площадь,  — угол между направлением нормали к рамке и направлением индукции магнитного поля
— угол между направлением нормали к рамке и направлением индукции магнитного поля 
Из полученного выражения видно, что момент сил, вращающих рамку, равен нулю только в случае, когда  = 0. Следовательно, рамка с током, помещенная в однородное магнитное поле, повернется (сориентируется) так, чтобы момент сил, действующих на нее, был равен нулю. При этом вектор нормали
= 0. Следовательно, рамка с током, помещенная в однородное магнитное поле, повернется (сориентируется) так, чтобы момент сил, действующих на нее, был равен нулю. При этом вектор нормали  к рамке совпадет по направлению с вектором индукции
к рамке совпадет по направлению с вектором индукции  магнитного поля, т. е. рамку с током, которую называют элементарным контуром, можно использовать для определения направления вектора индукции магнитного поля в исследуемой области. Подчеркнем, что равновесие рамки будет устойчивым, поскольку при ее повороте из положения равновесия возникнет момент М сил Ампера, стремящийся вернуть рамку в исходное положение. Таким образом, можно сделать вывод, что направление нормали к элементарному контуру, расположенному в магнитном поле, указывает направление вектора индукции магнитного поля (
магнитного поля, т. е. рамку с током, которую называют элементарным контуром, можно использовать для определения направления вектора индукции магнитного поля в исследуемой области. Подчеркнем, что равновесие рамки будет устойчивым, поскольку при ее повороте из положения равновесия возникнет момент М сил Ампера, стремящийся вернуть рамку в исходное положение. Таким образом, можно сделать вывод, что направление нормали к элементарному контуру, расположенному в магнитном поле, указывает направление вектора индукции магнитного поля ( = 0) в исследуемой области.
= 0) в исследуемой области.
Заметим, что направление нормали к плоскости рамки определяется по правилу буравчика:
- направление нормали совпадает с направлением движения буравчика, если его вращать по направлению тока в рамке.
Максимальный момент сил  достигается при угле
достигается при угле  = 90°. Таким образом, в данной точке поля отношение
= 90°. Таким образом, в данной точке поля отношение  характеризует модуль вектора индукции магнитного поля:
характеризует модуль вектора индукции магнитного поля: 
где I — сила тока в рамке, S — площадь рамки.
Произведение силы тока в контуре и площади контура называют магнитным моментом контура:  Эта величина характеризует механический вращающий момент, появляющийся при помещении контура в область магнитного поля:
Эта величина характеризует механический вращающий момент, появляющийся при помещении контура в область магнитного поля: 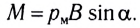
Вращающий момент сил, действующих на рамку, зависит от ее ориентации. Причем существуют положения, в которых он равен нулю. При повороте рамки на угол 180° механический момент меняет свой знак на противоположный.
Чтобы избежать такой «пульсации» механического вращающего момента, в электродвигателях используют сложную обмотку, представляющую собой большое количество рамок, плоскости которых повернуты на небольшой угол друг относительно друга. Поэтому при любой ориентации обмотки на нее действует некоторый постоянный механический момент.
Момент сил, действующий на обмотку, можно вычислить по формуле

где r — радиус обмотки, N — число витков в обмотке, I — сила тока в обмотке, В — индукция магнитного поля, l — длина проводника.
Основными частями электрического двигателя постоянного тока являются: индуктор — постоянный магнит или электромагнит со стальным сердечником и якорь — катушка с проводом, в обмотке которой вырабатывается ЭДС индукции. Индуктор является неподвижной частью двигателя — статором, а якорь — его вращающейся частью — ротором (рис. 193).
Для того чтобы ротор непрерывно вращался в одном и том же направлении, необходимо изменять направление электрического тока в его обмотках.
В двигателях постоянного тока это переключение осуществляется с помощью коллектора и щеток (неподвижных контактов, которые скользят по пластинам).
Через каждые пол-оборота коллектор переключается на другую щетку, и в результате направление тока в катушке изменяется на противоположное. При этом вращающий момент двигателя сохраняет свой знак. Таким образом, ротор все время вращается в одну и ту же сторону. Переключение с одной щетки на другую происходит в тот момент времени, когда вектор индукции магнитного поля лежит в плоскости обмотки, т. е. сила Ампера, действующая на провода обмотки, максимальна.
Отметим, что одна и та же машина постоянного тока может использоваться в качестве генератора, так и в качестве электродвигателя. Если по обмотке индуктора пропустить постоянный ток и при этом вращать якорь, то в обмотке якоря будет создаваться переменная ЭДС индукции — машина будет работать в режиме генератора электрического тока.
Электродвигатели постоянного тока применяются:
- на транспорте (троллейбус, трамвай, электровоз);
- в бытовой электро- и радиоаппаратуре (электробритва, магнитофон);
- в стартерах двигателей автомобилей.
Первый электродвигатель, пригодный для практического применения, построил русский ученый Борис Семенович Якоби в 1834 г.
Электродвигатели
Физические исследования, которые часто проводят ради «научного любопытства», при удачном завершении могут открыть новый этап в развитии техники. Именно так произошло с изучением электромагнитных явлений. Один государственный деятель спросил у Майкла Фарадея: «Как вы думаете, будет ли какая-то польза от электричества?» Фарадей улыбнулся: «Скоро вы будете облагать электричество налогом!» Прошло время, и сейчас нашу жизнь невозможно представить, например, без электрических двигателей — удобных, компактных, экологически чистых устройств. О том, как работают некоторые электрические устройства, вы узнаете из этого параграфа.
Действие магнитного поля на рамку с током
Возьмем легкую прямоугольную рамку, состоящую из нескольких витков изолированного провода, и поместим ее между полюсами магнита так, чтобы она могла легко вращаться вокруг горизонтальной оси.
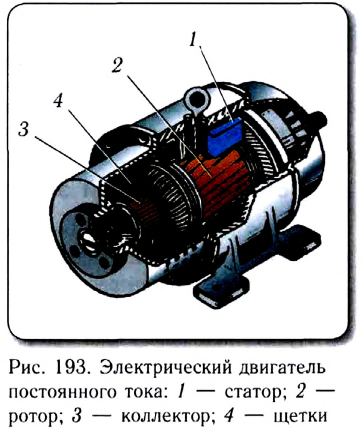
Пропустим в рамке электрический ток (рис. 7.1, а). Рамка повернется и, качнувшись несколько раз, установится так, как показано на рис. 7.1, б. Это — положение равновесия рамки.
Выясним, почему рамка начинает движение. Воспользовавшись правилом левой руки, определим направление силы Ампера, действующей на каждую сторону рамки в начале наблюдения. На рис. 7.1, а видим, что сила Ампера  действующая на сторону AB, направлена вверх, а сила Ампера
действующая на сторону AB, направлена вверх, а сила Ампера  действующая на сторону CD, направлена вниз. Итак, обе силы поворачивают рамку по ходу часовой стрелки.
действующая на сторону CD, направлена вниз. Итак, обе силы поворачивают рамку по ходу часовой стрелки.
А теперь выясним, почему рамка прекратила движение. Дело в том, что после прохождения рамкой положения равновесия силы Ампера будут поворачивать ее уже против хода часовой стрелки (рис. 7.1, в). В результате рамка начнет поворачиваться в обратном направлении, пройдет положение равновесия и снова изменит направление движения. В конце концов из-за действия сил трения рамка остановится.
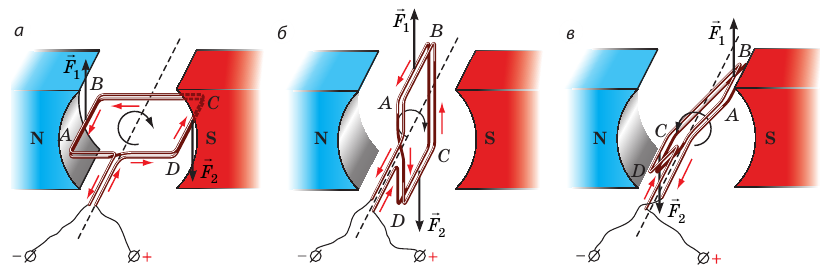
Рис. 7.1. Исследование действия магнитного поля на рамку с током (направление тока показано красными стрелками):
Как работает двигатель постоянного тока
Вращение рамки с током в магнитном поле было использовано при создании электрических двигателей.
Электрический двигатель — это устройство, в котором электрическая энергия преобразуется в механическую.
Чтобы понять, как работает электродвигатель постоянного тока, выясним, как заставить рамку непрерывно вращаться в одном направлении. Нетрудно догадаться: нужно, чтобы в момент прохождения рамкой положения равновесия направление тока в рамке изменялось на противоположное.
Устройство, автоматически изменяющее направление тока в рамке, называют коллектором.
На рис. 7.2 изображена модель, с помощью которой можно понять принцип действия коллектора. Коллектор представляет собой два полукольца (1), к каждому из которых прижата металлическая щетка (2). Полукольца изготовлены из проводника и разделены зазором. Щетки служат для подведения напряжения от источника тока (3) к рамке (4), которая легко вращается вокруг горизонтальной оси и расположена между полюсами мощного магнита (5). Одна щетка соединена с положительным полюсом источника тока, другая — с отрицательным.
После замыкания цепи рамка в результате действия сил Ампера начинает поворачиваться по ходу часовой стрелки (рис. 7.2, а). Полукольца коллектора поворачиваются вместе с рамкой, а щетки остаются неподвижными, поэтому после прохождения рамкой положения равновесия (рис. 7.2, б) к щеткам будут прижаты уже другие полукольца (рис. 7.2, в). Направление тока в рамке изменится на противоположное, поэтому она продолжит движение по ходу часовой стрелки, то есть направление вращения рамки не изменится.
Рис. 7.2. Модель, демонстрирующая принцип действия коллектора (а). После прохождения рамкой положения равновесия (б) щетки коллектора прижаты уже к другим полукольцам (в), поэтому направление тока в рамке изменяется на противоположное
- Заказать решение задач по физике
Таким образом, чтобы изготовить электрический двигатель, нужно иметь: 1) постоянный магнит или электромагнит; 2) проводящую рамку; 3) источник тока; 4) коллектор.
Увеличиваем мощность электрического двигателя:
Силы Ампера, обеспечивающие вращение рамки, прямо пропорциональны длине проводника. Поэтому для увеличения мощности электродвигателя его обмотку изготовляют из большого количества витков провода. Витки вкладывают в специальные пазы на боковой поверхности сердечника — цилиндра, изготовленного из листов магнитомягкой стали. Сердечник с обмоткой вместе с полукольцами коллектора образуют ротор (от лат. rotare — вращаться) двигателя (рис. 7.3).
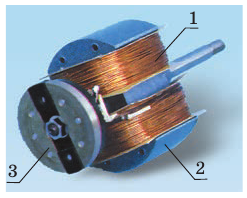
Рис. 7.3. Ротор двигателя с одной обмоткой: 1 — обмотка; 2 — сердечник; 3 — полукольца
Для равномерного вращения ротора используют несколько обмоток, которые наматывают на один сердечник. Коллектор такого двигателя имеет не два полукольца, а ряд медных дугообразных пластин, закрепленных на изолированном барабане (рис. 7.4).
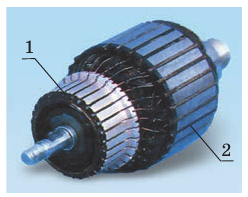
Рис. 7.4. Ротор двигателя с двенадцатью обмотками:
1 — пластины коллектора; 2 — сердечник с обмоткой
В большинстве современных электродвигателей вместо постоянного магнита используют электромагнит, который составляет единое целое с корпусом электродвигателя и служит статором (неподвижной частью устройства; от лат. stator — стоящий неподвижно). Обмотки статора и ротора подключены к одному источнику тока. Когда в обмотках идет ток, ротор вращается в магнитном поле статора и двигатель работает (рис. 7.5).
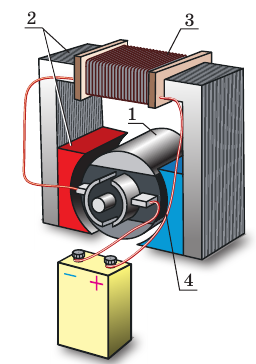
Рис. 7.5. Модель электродвигателя постоянного тока:
1 — ротор; 2 — статор; 3 — обмотка статора; 4 — коллектор
Электродвигатели постоянного тока широко применяют в электротранспорте (трамваях, троллейбусах, электровозах, электромобилях), их используют как стартеры для запуска двигателей внутреннего сгорания. В промышленности и быту чаще используют электродвигатели переменного тока.
Электрические двигатели имеют существенные преимущества перед тепловыми: они более компактны, экономичны (их КПД достигает 98 %), удобны в применении (их мощность легко регулировать), не загрязняют окружающую среду.
Принцип действия электроизмерительных приборов
На поворачивании рамки с током в магнитном поле постоянного магнита основано действие электроизмерительных приборов магнитоэлектрической системы — гальванометров, амперметров и вольтметров постоянного тока.
Схема измерительного механизма таких приборов представлена на рис. 7.6.
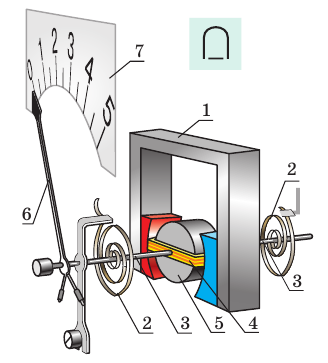
Рис. 7.6. Схема измерительного механизма приборов магнитоэлектрической системы: 1 — постоянный неподвижный магнит; 2 — спиральные пружины; 3 — полуоси; 4 — рамка, жестко закрепленная на полуосях; 5 — неподвижный сердечник; 6 — стрелка; 7 — шкала
Когда ток в рамке (4) отсутствует, спиральные пружины (2) удерживают полуоси (3), а значит, и стрелку (6) так, что конец стрелки устанавливается на нулевой отметке шкалы прибора (7). Когда прибор включают в цепь, в рамке идет ток и в результате действия сил Ампера рамка поворачивается в магнитном поле постоянного магнита (1). Вместе с рамкой поворачиваются полуоси, а значит, и стрелка.
Во время движения рамки пружины закручиваются и возникают дополнительные силы упругости. Когда момент сил упругости уравновешивает момент сил Ампера, движение рамки прекращается, а стрелка остается отклоненной. Чем больше сила тока в рамке, тем на больший угол отклонится стрелка и тем большим будет показание прибора.
Приборы магнитоэлектрической системы имеют большую точность и чувствительность.
Амперметр и вольтметр
Амперметр и вольтметр имеют одинаковое устройство, отличаются только их шкалы и электрические сопротивления. Амперметр включают в цепь последовательно, поэтому его сопротивление должно быть как можно меньшим, иначе сила тока в цепи значительно уменьшится. А вот вольтметр присоединяют к цепи параллельно с устройством, на котором измеряют напряжение, поэтому, чтобы сила тока в цепи практически не изменялась, сопротивление вольтметра должно быть как можно большим.
Принцип действия электродинамического громкоговорителя
Электродинамический громкоговоритель (динамик) — это устройство, преобразующее электрический сигнал в слышимый звук.
Звук излучают тела, колеблющиеся с частотой 20-20 ООО Гц (то есть совершающие от 20 до 20 ООО колебаний в секунду)*.
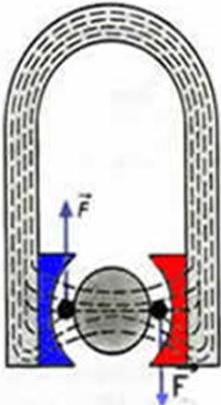
Основные части динамика — катушка с током (звуковая катушка) (1), к которой прикреплен диффузор (2), и магнитная система, состоящая из постоянного кольцевого магнита (3), стального цилиндра (керна) (4) и двух стальных дисков (фланцев) (5), плотно прилегающих к магниту. Магнитная система создает магнитное поле, направленное перпендикулярно виткам катушки.
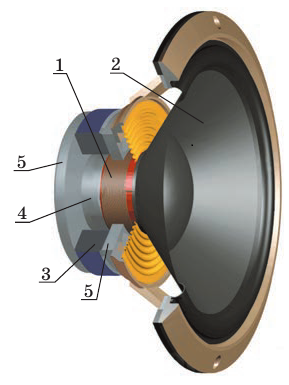
Рис. 7.7. Устройство электродинамического громкоговорителя: 1 — звуковая катушка; 2 — диффузор; 3 — постоянный кольцевой магнит; 4 — керн; 5 — фланцы
Когда в катушке течет ток, на ее витки действуют силы Ампера, заставляющие катушку двигаться вдоль керна и втягиваться в зазор кольцевого магнита. Когда сила тока в катушке изменяется со звуковой частотой, так же изменяются и силы Ампера, и катушка то сильнее, то слабее втягивается в зазор (колеблется в такт изменению силы тока). Вместе с катушкой колеблется и прикрепленный к ней диффузор, который «толкает» воздух, создавая звуковую волну, — громкоговоритель излучает звук.
Подводим итоги:
В результате действия сил Ампера рамка с током может поворачиваться 1 ^ в магнитном поле. Это явление используют в работе электродвигателей. Чтобы обеспечить вращение рамки, применяют коллектор — устройство, автоматически изменяющее направление тока в рамке.
Гальванометры, амперметры и вольтметры — это измерительные приборы магнитоэлектрической системы. Их действие основано на поворачивании рамки с током в магнитном поле постоянного магнита.
Еще один пример применения сил Ампера — электродинамический громкоговоритель, действие которого основано на втягивании катушки с током в магнитное поле кольцевого магнита.
- Трансформатор — устройство, принцип работы
- Магнитное поле в физике
- Вектор индукции магнитного поля
- Магнитное поле Земли
- Электрические измерительные приборы
- Электрическое поле Земли
- Ускорители заряженных частиц
- Генератор электрического тока в физике
Электродвигатель постоянного тока
Электродвигатель — это двигатель, служащий для преобразования электрической энергии в механическую.
Основная часть электродвигателя — это контур (рамка, катушка) с током, расположенный в сильном магнитном поле (рис. 1). На контур в магнитном поле действует вращающий момент, в результате чего контур поворачивается и останавливается в положении равновесия, т.е. в положении, в котором его магнитный момент направлен параллельно магнитной индукции (~vec p_mupuparrows vec B) (плоскость контура перпендикулярна линиям индукции магнитного поля). Если при прохождении контура через положение равновесия направление тока изменится на противоположное, то изменится и направление магнитного момента. Пройдя по инерции положение равновесия, контур сделает еще пол-оборота. Если периодически изменять направление тока, то контур придет во вращательное движение. Изменение направления тока осуществляется автоматически с по-мощью устройства, которое называется коллектором. Коллектор со-стоит из двух металлических полуцилиндров, к которым присоединены концы контура. Через них и скользящие контакты (щетки) контур присоединяют к источнику тока.
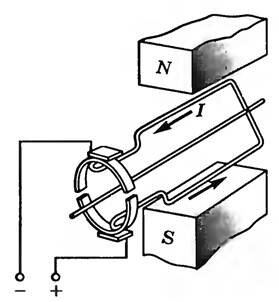
Рис. 1
Наибольший момент действует на контур, плоскость которого параллельна магнитной индукции (vec B). Следовательно, если расположить два контура перпендикулярно друг к другу и вывести их концы на четверть-кольцевой коллектор (рис. 2), то вращающий момент резко возрастет и увеличится плавность хода подвижной части двигателя (ротора).
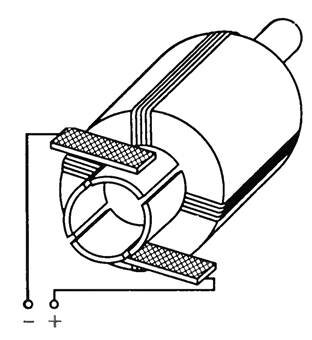
Рис. 2
В промышленных двигателях магнитное поле создается обмоткой электромагнита; в роторе делают пазы, в которые укладывают много витков одной секции (вместо рамки); различные секции уложены под углом друг к другу, и их концы выведены на противоположные бока коллектора, к которому прижимаются щетки, соединенные с источником тока. От источника тока напряжение подается в электромагниты статора (неподвижной части двигателя). По каждой секции идет ток только тогда, когда ее пластины касаются щеток, т.е. когда плоскость этой секции параллельна вектору магнитной индукции. При этом секции поочередно создают самый большой вращающий момент.
Магнит или электромагнит, который создает магнитное поле, называют часто индуктором, а рамку (обмотку), через которую про-пускают электрический ток, — якорем.
Основной рабочей характеристикой электродвигателя является вращающий момент М, создаваемый на валу двигателя силой Ампера, действующей на обмотки якоря:
(~2FrN = 2IBlrN ,)
где I — сила тока в обмотке, В — индукция магнитного поля, l — длина проводника, r — радиус ротора, N — число витков в обмотке.
Такие двигатели постоянного тока используют на транспорте (в электровозах, трамваях, троллейбусах), на подъемных кранах, во многих бытовых электрических устройствах (электробритвы, магнитофоны и др.).
С помощью электродвигателя постоянного тока — стартера — осуществляется запуск двигателя автомобиля.
Литература
Аксенович Л. А. Физика в средней школе: Теория. Задания. Тесты: Учеб. пособие для учреждений, обеспечивающих получение общ. сред, образования / Л. А. Аксенович, Н.Н.Ракина, К. С. Фарино; Под ред. К. С. Фарино. — Мн.: Адукацыя i выхаванне, 2004. — C.322- 323.
На чтение 7 мин. Опубликовано 08.04.2020 Обновлено 08.04.2020
Согласно закону природы, энергия не исчезает и ниоткуда не берётся, она просто передаётся от одного вещества к другому, изменяя форму. На этом явлении и построена работа электрического двигателя. Его КПД, в зависимости от вида устройства, может изменяться от 75 до 96 процентов. При этом величина полезной работы зависит не только от конструкции электродвигателя, но также и от его характеристик, например, мощности.
Содержание
- Общие сведения
- Принцип работы
- Устройство электромотора
- Способы повышения КПД
Общие сведения
Для того чтобы механизм привести в действие, нужно затратить работу. Если при этом нет трения деталей, то он считается идеальным. В этом случае его полезная работа, выполненная самим двигателем, будет равняется затраченной. Под последней же понимают ту, что совершается для приведения механизма в действие при приложении внешней силы. О такой работе говорят, что она полная.
В реальных же устройствах детали не являются невесомыми, они имеют вес из-за чего существует трение. Поэтому полезная работа (Ап) будет меньше затраченной (Аз). При этом если одну увеличить в несколько раз, то вторая возрастёт на то же значение. Другими словами, отношение Ап / Аз является постоянной величиной для конкретно рассматриваемого устройства. Но так как механизм неидеальный, то это отношение всегда будет меньше единицы.

Значение выражения Ап / Аз, по сути, описывает качество устройства, являясь важной для него характеристикой. Поэтому ему присвоили отдельное имя — коэффициент полезного действия (КПД). Для его обозначения решили использовать букву греческого алфавита «эта» (η). Часто формулу записывают так: η = (Ап / Аз) * 100%, считая его в процентах. Для электродвигателя коэффициент находят как отношение работы, выполненной самим устройством к действию по его запуску.
КПД электрического прибора, впрочем, как и любого другого, всегда будет меньше единицы. Если представить, что это не так, то в этом случае получался бы источник новой энергии. А согласно законам природы, она не может взяться ниоткуда. То есть такого устройства не существует. Ещё в XIX веке французская академия наук отказалась принимать проекты так называемых вечных двигателей из-за противоречия фундаментальному явлению природы — закону сохранения энергии.
Работа электродвигателя основана на преобразовании механической энергии в электрическую.
Изобретателем устройства считается физик-экспериментатор из Англии Майкл Фарадей. Именно он придумал способ, как заставить намагниченную стрелку оборачиваться вокруг магнита. Это послужило основой для открытия Ампером соленоида и Барлоу электрического колеса, ставшего родоначальником униполярного электродвигателя.
Принцип работы

Пусть есть рамка, которая помещена в магнитное поле. Её можно подключить к источнику тока. При этом принять, что перемещаются носители зарядов против часовой стрелки. Для этого положительный полюс генератора нужно подключить справа, а отрицательный слева. Эта рамка может поворачиваться вокруг горизонтальной оси. Помещена она в магнитное поле линии которого направлены перпендикулярно оси вращения.
Магнетизм будет влиять на каждую сторону рамки по-разному. Чтобы определить, как будут действовать силы нужно воспользоваться правилом буравчика: если ладонь расположить таким образом, чтобы в неё входили линии магнитного потока, а пальцы совпадали с направлением тока, то отогнутый большой палец укажет направление воздействия. Таким образом, получается:
- северная сторона — сила направлена вверх (F1);
- южная сторона — вниз (F2);
- западный и восточный участок — сила не действует.

В результате рамка с током начинает поворачиваться. Но как только она изменит своё положение на 90 градусов, то сразу же замрёт. Действующие силы изменят своё положение. Это приведёт к тому, что они будут растягивать рамку. Получается, что в магнитном поле проводник стремится повернуться так, чтобы её плоскость стала перпендикулярно направлению действия поля.
Этот эффект и используется в работе электродвигателя. Изменяя направление тока, можно добиться постоянного вращения рамки. Делается это с помощью цилиндра, разрезанного на две части. Один провод рамки подключается изнутри к правому полукольцу, а другой к левому. С внешних же сторон с помощью скользящих контактов подаётся напряжение от источника тока.
При такой схеме в тот момент, когда рамка повернётся на 90 градусов, разрезы цилиндра изменят своё положение. Разогнавшись, конструкция проскочит это положение по инерции, то есть выполнит половину оборота. На её стороны опять будут действовать две противоположно направленные силы Ампера. Рамка снова начнёт разворачиваться, стремясь вращаться по часовой стрелке. Это явление будет происходить в такой системе непрерывно.
В итоге получится устройство, всегда вращающее рамку в одну сторону. По сути, это и есть примитивный электромотор или как его называют в физике — вращающая электрическая машина. Принципиальная её разница от двигателя внутреннего сгорания (ДВС) заключается в том, что для вращения используется не тепловая, а электрическая энергия.
Устройство электромотора
КПД двигателя внутреннего сгорания располагается в пределах от 40 до 60%. В то время как у электрического он достигает 96%. Это довольно высокий показатель которого добиваются с помощью усовершенствования конструкции и использования сверхпроводниковых материалов. Существует несколько типов двигателей, работающих от электричества. Но в их конструкции используются одинаковые основные части.
Так, в состав устройства электрического двигателя входит:

- Вал — элемент на который устанавливаются остальные детали.
- Якорь — часть, состоящая из сердечника, набираемого из набора пластин из специальной электротехнической стали.
- Якорная обмотка — состоит из катушек индуктивности, в которых наводится электродвижущая сила.
- Коллектор — система изолированных проводящих пластин, к которым припаяны якорные обмотки.
- Главный полюс — изготавливается из постоянных магнитов.
- Обмотка возбуждения — располагается на роторе и подключена к контактным кольцам, через которые подаётся на устройство ток.
- Втулки — подшипники, с помощью которых осуществляется скольжение ротора по валу. Их качество во многом определяет КПД эл. двигателя.
- Роторные полюсы — используются четыре отделённых друг от друга полоски.
Неподвижная часть двигателя называется стартером, а вращающаяся — ротором. В пазы сердечника укладывают согнутые в форме рамки провода. Их концы соединяют с коллектором. К его пластинам поджимают через пружины две положительные щётки, подключённые через обмотки возбуждения и две отрицательные, соединённые с массой стартера. В задней крышке последнего устанавливаются щёткодержатели и втулка якоря.
От плюсовой клеммы источника питания провод идёт на входной контакт стартера. Ток проходит по нему, поступает на обмотку возбуждения и попадает на положительную щётку. С коллектора заряды переходят на рамки якоря, а после — на отрицательную щётку и на минус источника тока. В результате взаимодействия магнитного поля с обмотками возбуждения и рамками с током якорь начинает вращаться.
Это классическое устройство электродвигателя. Но техника не стоит на месте.
Поэтому в современных электрических моторах не используют обмотки возбуждения. А ток сразу подаётся на отрицательные щётки якоря. Это позволяет избежать дополнительного нагрева, что приводит в целом к увеличению качества системы.
Способы повышения КПД
Нахождение путей решения задачи по повышению энергоэффективности электродвигателей в промышленности и быту сегодня актуально как никогда. Например, новое поколение автомобилей — электромобили, становятся популярными из-за их экологичности по сравнению с дизельными моторами. Так, для сравнения, КПД машины с двигателем «Тесла», согласно презентации General Motors, составляет 95%, а с классическим топливным — 36%.
Основными причинами потерь в любом электродвигателе являются:

- перемагничивание ротора и статора;
- возникновение вихревых токов;
- нагрев обмоток;
- механическое трение.
Для электродвигателей с короткозамкнутым ротором мощностью до 17 кВт КПД, как правило, не превышает 88 процентов. Основные потери энергии происходят из-за нагревания. Охлаждение электрического мотора позволяет поднять наибольшее значение на 3%. При этом как показывает практика наилучший КПД может быть получен при работе двигателя на ¾ нагрузки. Так, для сравнения, в режиме холостого хода η = 0%, а при полной — η = 87%.
Получается, что суммарность потерь зависит от мощности и величины нагрузки. В начале 2000 годов популярным способом повышения КПД стало введение контроля коэффициента мощности (ККМ). С его помощью выполняется поддержание оптимального угла между вращающимися магнитными полями в электрическом двигателе. Достигается это пространственно-векторным управлением.

По определению оптимальный угол между полями ротора и статора должен быть равен 90 0С. Поэтому для поддержания его при различных режимах работы используют следующую последовательность включения: выпрямитель с активной ККМ, инвертор управления, трёхфазный двигатель. Эффективность такой схемы приближает работу электродвигателя к 96%. По прогнозам инженеров, это не предел. Использование энергоэффективных блоков ККМ на микроконтроллерах нового поколения и усовершенствования алгоритмов позволит повысить КПД электродвигателя ещё на два процента.
п.1. Полезная работа и затраченная работа
Полезной называется работа по подъёму грузов или преодолению какого-либо сопротивления.
Затраченной (полной) называется работа, совершённая приложенной силой.
Примеры полной и полезной работы
Затраченная работа равна сумме:
- полезной работы;
- работы против силы трения в различных частях механизма;
- работы по перемещению различных составных элементов механизма.
Поэтому всегда (A_text{полезная}lt A_text{затраченная})
п.2. КПД механизма
Коэффициент полезного действия механизма – это отношение его полезной работы к затраченной работе. $$ eta=frac{A_text{п}}{A_text{з}}cdot 100text{%} $$
Поскольку в реальных механизмах всегда (A_text{п}lt A_text{з}), $$ frac{A_text{п}}{A_text{з}}lt 1. $$
Следовательно КПД реальных механизмов (etalt 100text{%}).
Только в идеальном механизме, в котором нет потерь на трение, и все составные элементы не имеют веса, (A_text{п}=A_text{з}) и (eta=100text{%}).
КПД никогда не может быть выше (100text{%}).
КПД реальных механизмов можно увеличить за счет снижения трение в подвижных узлах и уменьшения веса всех составных элементов конструкции.
Для этого нужны новые смазочные вещества и лёгкие, но прочные конструкционные материалы.
п.3. Задачи
Задача 1. По наклонной плоскости поднимают груз массой 50 кг, прикладывая к нему силу 250 Н, направленную вдоль плоскости. Чему равен КПД плоскости, если её длина 10 м, а высота 3 м?
Дано:
(m=50 text{кг})
(gapprox 10 text{м/с}^2)
(F=250 text{Н})
(L=10 text{м})
(h=3 text{м})
__________________
(eta-?)
Полезная работа по подъему груза begin{gather*} A_text{п}=mgh. end{gather*} Затраченная работа на перемещение груза вдоль наклонной плоскости begin{gather*} A_text{з}=FL. end{gather*} КПД плоскости: begin{gather*} eta=frac{A_text{п}}{A_text{з}}cdot 100text{%}=frac{mgh}{FL}cdot 100text{%} end{gather*} Получаем: begin{gather*} eta=frac{50cdot 10cdot 3}{250cdot 10}cdot 100text{%}=60text{%} end{gather*} Ответ: 60%
Задача 2. С помощью подвижного блока поднимают груз массой 200 кг, прикладывая силу 1200 Н. Чему равен КПД блока?
Дано:
(m=200 text{кг})
(gapprox 10 text{м/с}^2)
(F=1200 text{Н})
__________________
(eta-?)
Полезная работа по подъему груза на высоту (h): begin{gather*} A_text{п}=mgh. end{gather*} Подвижный блок дает выигрыш в силе в 2 раза и проигрыш в расстоянии. Т.е. при работе нужно вытянуть трос длиной (2h). Затраченная работа: begin{gather*} A_text{з}=Fcdot 2h. end{gather*} КПД блока begin{gather*} eta=frac{A_text{п}}{A_text{з}}cdot 100text{%}=frac{mgh}{2Fh}cdot 100text{%}=frac{mg}{2F}cdot 100text{%} end{gather*} Получаем: begin{gather*} eta=frac{200cdot 10}{2cdot 1200}cdot 100text{%}approx 83,3text{%} end{gather*} Ответ: 83,3%
Задача 3. Груз массой 245 кг с помощью рычага равномерно подняли на высоту 6 см. При этом к длинному плечу рычага была приложена сила 500 Н, а точка приложения силы опустилась на 30 см. Найдите КПД рычага.
Дано:
(m=245 text{кг})
(gapprox 10 text{м/с}^2)
(h_2=6 text{см}=0,6 text{м})
(F_1=500 text{Н})
(h_1=30 text{см}=0,3 text{м})
__________________
(eta-?)
Полезная работа по подъему груза на высоту (h_2): begin{gather*} A_text{п}=mgh_2. end{gather*} Затраченная работа по опусканию длинного плеча рычага: begin{gather*} A_text{з}=F_1h_1. end{gather*} КПД рычага begin{gather*} eta=frac{A_text{п}}{A_text{з}}cdot 100text{%}=frac{mgh_2}{F_1h_1}cdot 100text{%} end{gather*} Получаем: begin{gather*} eta=frac{245cdot 10cdot 0,06}{500cdot 0,3}cdot 100text{%}=frac{147}{150}cdot 100text{%}=98text{%} end{gather*} Ответ: 98%
Задача 4. Чему равен КПД гидравлической машины, если для равномерного подъема груза массой 1,2 т к меньшему поршню прикладывают силу 160 Н? Площади поршней равны 5 см2 и 500 см2.
Дано:
(m=1,2 text{т}=1200 text{кг})
(gapprox 10 text{м/с}^2)
(F_1=160 text{Н})
(S_1=5 text{см}^2=5cdot 10^{-4} text{м}^2)
(S_2=500 text{см}^2=5cdot 10^{-2} text{м}^2)
__________________
(eta-?)
При опускании малого поршня на высоту (h_1) из малого в большой цилиндр вытекает объем жидкости равный $$ V=S_1h_1=S_2h_2Rightarrow frac{h_2}{h_1}=frac{S_1}{S_2} $$ Полезная работа по подъему груза на высоту (h_2): begin{gather*} A_text{п}=mgh_2. end{gather*} Затраченная работа по опусканию поршня малого цилиндра: begin{gather*} A_text{з}=F_1h_1. end{gather*} КПД гидравлической машины begin{gather*} eta=frac{A_text{п}}{A_text{з}}cdot 100text{%}=frac{mgh_2}{F_1h_1}cdot 100text{%}=frac{mgS_1}{F_1S_2}cdot 100text{%} end{gather*} Получаем: begin{gather*} eta=frac{1200cdot 10cdot 5cdot 10^{-4}}{160cdot 5cdot 10^{-2}}cdot 100text{%}=frac{600}{800}cdot 100text{%}=75text{%} end{gather*} Ответ: 75%
Задача 5*. Груз массой 12 кг поднимают с помощью подвижного блока массой 3 кг. Чему равен КПД блока?
Дано:
(M=12 text{кг})
(m=3 text{кг})
__________________
(eta-?)
Полезная работа по подъему груза на высоту (h): begin{gather*} A_text{п}=Mgh. end{gather*} Подвижный блок дает выигрыш в силе в 2 раза. Поэтому достаточно приложить силу, равную половине суммы весов груза и блока: begin{gather*} F=frac 12(M+m)g end{gather*} При этом будет проигрыш в расстоянии. Потребуется вытянуть трос длиной (2h). Затраченная работа, приложенная к тросу: begin{gather*} A_text{з}=Fcdot 2h=frac 12(M+m)gcdot 2h=(M+m)gh. end{gather*} КПД подвижного блока begin{gather*} eta=frac{A_text{п}}{A_text{з}}cdot 100text{%}=frac{Mgh}{(M+m)gh}cdot 100text{%}=frac{M}{M+m}cdot 100text{%} end{gather*} Получаем: begin{gather*} eta=frac{12}{12+3}cdot 100text{%}=80text{%} end{gather*} Ответ: 80%
Задача 6. Сколько воды можно поднять из колодца глубиной 36 м за 1 ч, если мощность электродвигателя равна 5 кВт, КПД всей установки равно 70%?
Дано:
(N=5 text{кВт}=5cdot 10^3 text{Вт})
(eta=70text{%}=0,7)
(h=36 text{м})
(t=1 text{ч}=3600 text{с})
(gapprox 10 text{м/с}^2)
__________________
(m-?)
Полезная работа по подъему груза на высоту (h): begin{gather*} A_text{п}=Mgh. end{gather*} Затраченная работа электродвигателя: begin{gather*} A_text{з}=Nt. end{gather*} КПД установки begin{gather*} eta=frac{A_text{п}}{A_text{з}}=frac{mgh}{Nt} end{gather*} Масса воды begin{gather*} m=frac{eta Nt}{gh} end{gather*} Получаем: begin{gather*} m=frac{0,7cdot 5cdot 10^3cdot 3600}{10cdot 36}=35cdot 10^3 (text{кг})=35 text{т} end{gather*} Ответ: 35 т
Задача 7*. КПД подвижного блока при подъеме первого груза равен 80%, а при подъеме второго груза – 90%. Масса какого груза больше и во сколько раз? Трением в блоке можно пренебречь.
Дано:
(eta_1=80text{%}=0,8)
(eta_2=90text{%}=0,9)
__________________
(frac{M_2}{M_1}-?)
КПД подвижного блока массой (m), с помощью которого поднимают груз массой (M) begin{gather*} eta=frac{M}{M+m} end{gather*} (см. Задачу 5 выше). Масса груза begin{gather*} eta(M+m)=MRightarrow eta m=(1-eta)MRightarrow M=frac{eta}{1-eta}m end{gather*} Получаем: begin{gather*} M_1=frac{0,8}{1-0,8}m=4m,\[6pt] M_2=frac{0,9}{1-0,9}m=9m end{gather*} Масса второго груза больше.
Отношение масс begin{gather*} frac{M_2}{M_1}=frac{9m}{4m}=2,25 (text{раз}) end{gather*} Ответ: масса второго груза больше в 2,25 раз
п.4. Лабораторная работа №13. Определение КПД наклонной плоскости
Цель работы
Научиться проводить измерения и рассчитывать КПД простого механизма на примере наклонной плоскости. Исследовать зависимость КПД наклонной плоскости от высоты.
Теоретические сведения

Работа по подъему тела весом (P) вертикально на высоту (h) (из точки C в точку B): $$ A_text{CB}=Ph $$
Работа по перемещению того же тела силой (F), направленной вдоль наклонной плоскости длиной (L) (из точки A в точку B): $$ A_text{AB}=FL $$
В обоих случаях тело перемещается с нулевого уровня AC, где (h_0=0), на уровень с высотой (h) в точку B. Работа сторонних сил в этом случае равна изменению потенциальной энергии тела: $$ A=A_text{CB}=A_text{AB}=Delta E_p $$
Получаем уравнение для идеальной наклонной плоскости (без трения): $$ Ph=FL $$
При наличии трения получаем неравенство: $$ Phlt FL $$
Полезная и затраченная работа для наклонной плоскости: $$ A_text{п}=Ph, A_text{з}=FL $$
КПД наклонной плоскости: $$ eta=frac{A_text{п}}{A_text{з}}cdot 100text{%}=frac{Ph}{FL}cdot 100text{%} $$
Затраченная работа равна сумме полезной работы и работы по преодолению силы трения: $$ A_text{з}=A_text{п}+F_text{тр}L $$
Откуда сила трения равна: $$ F_text{тр}=frac{A_text{з}-A_text{п}}{L}=frac{FL-Ph}{L}=F-Pfrac hL $$
Вес (P) и сила (F) определяются в работе с помощью динамометра с ценой деления (d=0,1 text{Н}).
Абсолютная погрешность прямых измерений $$ Delta_F=Delta_P=frac d2=0,05 text{Н}. $$
Сила (F) определяется в серии из пяти опытов с вычислением средних величин.
Высота наклонной плоскости (h) и длина наклонной плоскости (L) определяются с помощью мерной ленты с ценой деления (d=5 text{мм}). Абсолютная погрешность (Delta_L=2,5 text{мм}).
Относительные погрешности измерений вычисляются как обычно.
Относительная погрешность расчета КПД: $$ delta_eta=delta_F+delta_P+delta_h+delta_L $$
Абсолютная погрешность расчета КПД: $$ Delta_eta=etacdot delta_eta $$
Приборы и материалы
Доска длиной от 70 см, штатив с муфтой и лапкой, брусок массой не менее 300 г, мерная лента, динамометр.
Ход работы
1. Измерьте мерной лентой длину доски (L).
2. Определите вес бруска (P) с помощью динамометра.
3. Соберите наклонную плоскость: закрепите один конец доски в лапке штатива на высоте около (h=frac L3.)
4. Положите брусок на наклонную плоскость, прикрепите к нему динамометр и равномерно тяните по наклонной плоскости. Следите, чтобы динамометр располагался параллельно наклонной плоскости. Запишите измеренное значение (F). Повторите измерение (F) в серии из пяти опытов.
5. Соберите новую наклонную плоскость: закрепите один конец доски в лапке штатива на высоте около (h=frac L4). Перейдите на шаг 4 и повторите серию опытов для определения (F).
6. Рассчитайте КПД для двух исследованных наклонных плоскостей. Найдите относительные и абсолютные погрешности расчетов КПД.
7. Для каждой из наклонных плоскостей укажите величину полезной и затраченной работы, найдите силу трения.
8. Сделайте выводы о зависимости силы трения и КПД от высоты наклонной плоскости.
Результаты измерений и вычислений
Длина наклонной плоскости (доски) begin{gather*} L=80 text{см}=800 text{мм},\[7pt] Delta_L=2,5 text{мм},\[6pt] delta_L=frac{Delta_L}{L}=frac{2,5}{800}approx 0,0031=0,31text{%} end{gather*}
Вес бруска begin{gather*} P=4,4 text{Н},\[7pt] Delta_P=0,05 text{Н},\[6pt] delta_P=frac{Delta_P}{P}=frac{0,05}{4,4}approx 0,0011=1,1text{%} end{gather*}
1. Наклонная плоскость высотой (h=27 text{см})
Высота наклонной плоскости begin{gather*} h=27 text{см}=270 text{мм},\[7pt] Delta_h=2,5 text{мм},\[6pt] delta_h=frac{Delta_h}{h}=frac{2,5}{270}approx 0,0093=0,93text{%} end{gather*}
Определение силы тяги (F) в серии опытов
| № опыта | 1 | 2 | 3 | 4 | 5 | Сумма |
| $$ F, H $$ | 2,9 | 2,8 | 3,0 | 2,7 | 2,8 | 14,2 |
| $$ Delta_F, H $$ | 0,06 | 0,04 | 0,16 | 0,14 | 0,04 | 0,44 |
begin{gather*} F_text{ср}=frac{sum F_i}{5}=frac{14,2}{5}=2,84 (text{Н}),\[6pt] Delta_{Ftext{ср}}=frac{sum Delta_{Fi}}{5}=frac{0,44}{5}approx 0,09 (text{Н}),\[6pt] F=(2,84pm 0,09) text{Н},\[7pt] delta_F=frac{0,09}{2,84}approx 0,032=3,2text{%} end{gather*}
Полезная работа: $$ A_text{П}=Ph=4,4cdot 0,27=1,188 (text{Дж}) $$
Затраченная работа: $$ A_text{З}=FL=2,84cdot 0,8=2,272 (text{Дж}) $$
Сила трения: $$ F_text{тр}=F-Pfrac hL=2,84-4,4cdot frac{0,27}{0,8}approx 1,36 (text{Н}) $$
КПД наклонной плоскости: $$ eta=frac{A_text{П}}{A_text{З}}=frac{1,188}{2,272}approx 0,523=52,3text{%} $$
Погрешности расчета КПД: $$ delta_eta=delta_F+delta_P+delta_h+delta_L=0,032+0,011+0,0093+0,0031=0,0554approx 0,056=5,6text{%} $$
При расчете (delta_eta) использовали округление с избытком. $$ Delta_eta=0,523cdot 0,056approx 0,029=2,9text{%} $$
Окончательно получаем: $$ eta=(52,3pm 2,9)text{%}, delta_eta=5,6text{%} $$
2. Наклонная плоскость высотой (h=20 text{см})
Высота наклонной плоскости begin{gather*} h=20 text{см}=200 text{мм},\[7pt] Delta_h=2,5 text{мм},\[6pt] delta_h=frac{Delta_h}{h}=frac{2,5}{200}approx 0,013=1,3text{%} end{gather*}
Определение силы тяги (F) в серии опытов
| № опыта | 1 | 2 | 3 | 4 | 5 | Сумма |
| $$ F, H $$ | 2,4 | 2,6 | 2,5 | 2,6 | 2,5 | 12,6 |
| $$ Delta_F, H $$ | 0,12 | 0,08 | 0,02 | 0,08 | 0,02 | 0,32 |
begin{gather*} F_text{ср}=frac{sum F_i}{5}=frac{12,6}{5}=2,52 (text{Н}),\[6pt] Delta_{Ftext{ср}}=frac{sum Delta_{Fi}}{5}=frac{0,32}{5}approx 0,06 (text{Н}),\[6pt] F=(2,52pm 0,06) text{Н},\[7pt] delta_F=frac{0,06}{2,52}approx 0,024=2,4text{%} end{gather*}
Полезная работа: $$ A_text{П}=Ph=4,4cdot 0,2=0,88 (text{Дж}) $$
Затраченная работа: $$ A_text{З}=FL=2,52cdot 0,8=2,016 (text{Дж}) $$
Сила трения: $$ F_text{тр}=F-Pfrac hL=2,52-4,4cdot frac{0,2}{0,8}approx 1,42 (text{Н}) $$
КПД наклонной плоскости: $$ eta=frac{A_text{П}}{A_text{З}}=frac{0,88}{2,016}approx 0,437=43,7text{%} $$
Погрешности расчета КПД: $$ delta_eta=delta_F+delta_P+delta_h+delta_L=0,024+0,011+0,013+0,0031=0,0511approx 0,052=5,2text{%} $$
При расчете (delta_eta) использовали округление с избытком. $$ Delta_eta=0,437cdot 0,052approx 0,023=2,3text{%} $$
Окончательно получаем: $$ eta=(43,7pm 2,3)text{%}, delta_eta=5,2text{%} $$
Выводы
На основании полученных результатов можно сделать следующие выводы.
В работе проводился расчет КПД наклонной плоскости постоянной длины, но разной высоты.
Для высоты около (h=frac L3):
- полезная и затраченная работы: (A_text{П}=1,188 (text{Дж}), A_text{З}=2,272 (text{Дж}))
- сила трения: (F_text{тр}=1,36 (text{Н}))
- КПД: (eta=(52,3pm 2,9)text{%}, delta_eta=5,6text{%})
Для высоты около (h=frac L4):
- полезная и затраченная работы: (A_text{П}=0,88 (text{Дж}), A_text{З}=2,016 (text{Дж}))
- сила трения: (F_text{тр}=1,42 (text{Н}))
- КПД: (eta=(43,7pm 2,3)text{%}, delta_eta=5,2text{%})
Таким образом, с уменьшением высоты:
- сила трения растет;
- КПД наклонной плоскости падает.
Все задачи, поставленные перед исследованием, успешно выполнены.