From Wikipedia, the free encyclopedia
«Radial speed» redirects here. Not to be confused with radial motion.
A plane flying past a radar station: the plane’s velocity vector (red) is the sum of the radial velocity (green) and the tangential velocity (blue).
The radial velocity or line-of-sight velocity, also known as radial speed or range rate, of a target with respect to an observer is the rate of change of the distance or range between the two points. It is equivalent to the vector projection of the target-observer relative velocity onto the relative direction connecting the two points. In astronomy, the point is usually taken to be the observer on Earth, so the radial velocity then denotes the speed with which the object moves away from the Earth (or approaches it, for a negative radial velocity).
Formulation[edit]
Given a differentiable vector  defining the instantaneous position of a target relative to an observer.
defining the instantaneous position of a target relative to an observer.
Let
-

(1)

with  , the instantaneous velocity of the target with respect to the observer.
, the instantaneous velocity of the target with respect to the observer.
The magnitude of the position vector  is defined as
is defined as
-
(2)

The quantity range rate is the time derivative of the magnitude (norm) of , expressed as
-
(3)

Substituting (2) into (3)

Evaluating the derivative of the right-hand-side


using (1) the expression becomes

Since[1]

With

The range rate is simply defined as

the projection of the observer to target velocity vector onto the  unit vector.
unit vector.
A singularity exists for coincident observer target, i.e.  . In this case, range rate does not exist as
. In this case, range rate does not exist as  .
.
Applications in astronomy[edit]
In astronomy, radial velocity is often measured to the first order of approximation by Doppler spectroscopy. The quantity obtained by this method may be called the barycentric radial-velocity measure or spectroscopic radial velocity.[2] However, due to relativistic and cosmological effects over the great distances that light typically travels to reach the observer from an astronomical object, this measure cannot be accurately transformed to a geometric radial velocity without additional assumptions about the object and the space between it and the observer.[3] By contrast, astrometric radial velocity is determined by astrometric observations (for example, a secular change in the annual parallax).[3][4][5]
Spectroscopic radial velocity[edit]
Light from an object with a substantial relative radial velocity at emission will be subject to the Doppler effect, so the frequency of the light decreases for objects that were receding (redshift) and increases for objects that were approaching (blueshift).
The radial velocity of a star or other luminous distant objects can be measured accurately by taking a high-resolution spectrum and comparing the measured wavelengths of known spectral lines to wavelengths from laboratory measurements. A positive radial velocity indicates the distance between the objects is or was increasing; a negative radial velocity indicates the distance between the source and observer is or was decreasing.
William Huggins ventured in 1868 to estimate the radial velocity of Sirius with respect to the Sun, based on observed redshift of the star’s light.[6]

Diagram showing how an exoplanet’s orbit changes the position and velocity of a star as they orbit a common center of mass
In many binary stars, the orbital motion usually causes radial velocity variations of several kilometres per second (km/s). As the spectra of these stars vary due to the Doppler effect, they are called spectroscopic binaries. Radial velocity can be used to estimate the ratio of the masses of the stars, and some orbital elements, such as eccentricity and semimajor axis. The same method has also been used to detect planets around stars, in the way that the movement’s measurement determines the planet’s orbital period, while the resulting radial-velocity amplitude allows the calculation of the lower bound on a planet’s mass using the binary mass function. Radial velocity methods alone may only reveal a lower bound, since a large planet orbiting at a very high angle to the line of sight will perturb its star radially as much as a much smaller planet with an orbital plane on the line of sight. It has been suggested that planets with high eccentricities calculated by this method may in fact be two-planet systems of circular or near-circular resonant orbit.[7][8]
Detection of exoplanets[edit]

The radial velocity method to detect exoplanets
The radial velocity method to detect exoplanets is based on the detection of variations in the velocity of the central star, due to the changing direction of the gravitational pull from an (unseen) exoplanet as it orbits the star. When the star moves towards us, its spectrum is blueshifted, while it is redshifted when it moves away from us. By regularly looking at the spectrum of a star—and so, measuring its velocity—it can be determined if it moves periodically due to the influence of an exoplanet companion.
Data reduction[edit]
From the instrumental perspective, velocities are measured relative to the telescope’s motion. So an important first step of the data reduction is to remove the contributions of
- the Earth’s elliptic motion around the sun at approximately ± 30 km/s,
- a monthly rotation of ± 13 m/s of the Earth around the center of gravity of the Earth-Moon system,[9]
- the daily rotation of the telescope with the Earth crust around the Earth axis, which is up to ±460 m/s at the equator and proportional to the cosine of the telescope’s geographic latitude,
- small contributions from the Earth polar motion at the level of mm/s,
- contributions of 230 km/s from the motion around the Galactic center and associated proper motions.[10]
- in the case of spectroscopic measurements corrections of the order of ±20 cm/s with respect to aberration.[11]
- Sin i degeneracy is the impact caused by not being in the plane of the motion.
See also[edit]
- Proper motion – Measure of the observed changes in the apparent places of stars in the sky
- Peculiar velocity – Velocity of an object relative to a rest frame
- Relative velocity – Velocity of an object or observer B in the rest frame of another object or observer A
- Space velocity (astronomy) – Study of the movement of stars
- Bistatic range rate
- Doppler effect
- Inner product
- Orbit determination
- Lp space
References[edit]
- ^ Hoffman, Kenneth M.; Kunzel, Ray (1971). Linear Algebra (Second ed.). Prentice-Hall Inc. p. 271. ISBN 0135367972.
- ^ Resolution C1 on the Definition of a Spectroscopic «Barycentric Radial-Velocity Measure». Special Issue: Preliminary Program of the XXVth GA in Sydney, July 13–26, 2003 Information Bulletin n° 91. Page 50. IAU Secretariat. July 2002. https://www.iau.org/static/publications/IB91.pdf
- ^ a b Lindegren, Lennart; Dravins, Dainis (April 2003). «The fundamental definition of «radial velocity»» (PDF). Astronomy and Astrophysics. 401 (3): 1185–1201. arXiv:astro-ph/0302522. Bibcode:2003A&A…401.1185L. doi:10.1051/0004-6361:20030181. S2CID 16012160. Retrieved 4 February 2017.
- ^ Dravins, Dainis; Lindegren, Lennart; Madsen, Søren (1999). «Astrometric radial velocities. I. Non-spectroscopic methods for measuring stellar radial velocity». Astron. Astrophys. 348: 1040–1051. arXiv:astro-ph/9907145. Bibcode:1999A&A…348.1040D.
- ^ Resolution C 2 on the Definition of «Astrometric Radial Velocity». Special Issue: Preliminary Program of the XXVth GA in Sydney, July 13–26, 2003 Information Bulletin n° 91. Page 51. IAU Secretariat. July 2002. https://www.iau.org/static/publications/IB91.pdf
- ^ Huggins, W. (1868). «Further observations on the spectra of some of the stars and nebulae, with an attempt to determine therefrom whether these bodies are moving towards or from the Earth, also observations on the spectra of the Sun and of Comet II». Philosophical Transactions of the Royal Society of London. 158: 529–564. Bibcode:1868RSPT..158..529H. doi:10.1098/rstl.1868.0022.
- ^ Anglada-Escude, Guillem; Lopez-Morales, Mercedes; Chambers, John E. (2010). «How eccentric orbital solutions can hide planetary systems in 2:1 resonant orbits». The Astrophysical Journal Letters. 709 (1): 168–78. arXiv:0809.1275. Bibcode:2010ApJ…709..168A. doi:10.1088/0004-637X/709/1/168. S2CID 2756148.
- ^ Kürster, Martin; Trifonov, Trifon; Reffert, Sabine; Kostogryz, Nadiia M.; Roder, Florian (2015). «Disentangling 2:1 resonant radial velocity oribts from eccentric ones and a case study for HD 27894». Astron. Astrophys. 577: A103. arXiv:1503.07769. Bibcode:2015A&A…577A.103K. doi:10.1051/0004-6361/201525872. S2CID 73533931.
- ^ Ferraz-Mello, S.; Michtchenko, T. A. (2005). «Extrasolar Planetary Systems». Lect. Notes Phys. Lecture Notes in Physics. 683: 219–271. Bibcode:2005LNP…683..219F. doi:10.1007/10978337_4. ISBN 978-3-540-28208-2.
- ^ Reid, M. J.; Dame, T. M. (2016). «On the rotation speed of the Milky Way determined from HI emission». The Astrophysical Journal. 832 (2): 159. arXiv:1608.03886. Bibcode:2016ApJ…832..159R. doi:10.3847/0004-637X/832/2/159. S2CID 119219962.
- ^ Stumpff, P. (1985). «Rigorous treatment of the heliocentric motion of stars». Astron. Astrophys. 144 (1): 232. Bibcode:1985A&A…144..232S.
- The Radial Velocity Equation in the Search for Exoplanets ( The Doppler Spectroscopy or Wobble Method )
Further reading[edit]
- Hoffman, Kenneth M.; Kunzel, Ray (1971), Linear Algebra (Second ed.), Prentice-Hall Inc., ISBN 0135367972
- Renze, John; Stover, Christopher; and Weisstein, Eric W. «Inner Product.» From MathWorld—A Wolfram Web Resource.http://mathworld.wolfram.com/InnerProduct.html
Радиальная скорость

Рисунок 1. Вектор скорости цели и его составляющие

Рисунок 1. Вектор скорости цели и его составляющие
Радиальная скорость
Движение объекта с заданной скоростью характеризуется направлением, следовательно, его (движение) можно описать вектором скорости.
По отношению к направлению наблюдения цели вектор скорости цели может быть разложен на две составляющие:
- вектор, направленный вдоль линии визирования цели, называемый
радиальной скоростью
цели (может быть направлен как по направлению к точке наблюдения, так и в противоположном направлении); - вектор, перпендикулярный линии визирования цели, называемый
тангенциальной скоростью или
тангенциальной составляющей вектора скорости цели.
Диагональ прямоугольника, построенного на этих двух векторах, как на сторонах, и, следовательно,
представляющая собой их сумму, является
полным вектором скорости
цели или просто вектором скорости цели.
Полный вектор скорости цели показан на Рисунке 1 стрелкой зеленого цвета.
Длина вектора скорости цели равна значению скорости цели (чем длинее вектор, тем быстрее движется цель),
а его направление совпадает с направлением движения (курсом) цели.
Все, что «видит» радиолокатор в конкретный момент времени, — это часть вектора скорости цели, направленная вдоль радиуса,
проведенного от антенны к цели (на Рисунке 1 эта составляющая изображена в виде красной стрелки).
В общем случае данная составляющая не соответствует реальному курсу движения цели,
а описывает только ту его (движения) часть, которая направлена в сторону радиолокатора или от него
(в зависимости от того, приближается или удаляется цель).
Радиальная скорость цели — это составляющая полного вектора скорости цели,
которая направлена к радиолокатору или от него.
Перпендикулярно вектору радиальной скорости направлен вектор такнгенциальной скорости (синяя стрелка на Рисунке 1).
Величина этого вектора влияет на функционирование системы управления антенной в радиолокаторах сопровождения цели.
Когда летательный аппарат пролетает мимо радиолокатора по прямой линии, то есть с постоянным курсом (например, как на Рисунке 1),
то на траектории его движения есть точка, при нахождении его в которой радиальная скорость будет равна нулю.
При этом тангенциальная составляющая будет совпадать с полным вектором скорости цели.
Как известно,
эффект Допплера
возникает только тогда, когда радиальная скорость цели не равна нулю.
Поэтому в момент нахождения летательного аппарата в этой точке, его скорость не может быть измерена радиолокатором и,
следовательно, он не может быть отличен от
пассивной помехи,
порожденной неподвижным объектом.
При дальнейшем движении самолета по прямой после прохождения указанной точки радиальная скорость меняет
свое направление на противоположное и будет направлена в сторону от радиолокатора.
При этом также возникает эффект Допплера и частота отраженного сигнала будет отличаться от несущей частоты зондирующего сигнала на величину,
пропорциональную величине радиальной скорости.
Разница будет только в том, что когда радиальная скорость направлена к радиолокатору (цель приближается),
то частота эхо-сигнала увеличивается на величину допплеровской составляющей,
а когда радиальная скорость направлена от радиолокатора (цель удаляется), то частота эхо-сигнала уменьшается на эту же величину.
Если же цель движется вокруг позиции радиолокатора по кругу с постоянным радиусом,
то ее радиальная скорость во всех точках траектории будет равна нулю.
В таком случае эффект Допплера не возникает и допплеровская частота будет равна нулю.
Эхо-сигнал такой цели будет подавлен в
фильтре системы селекции движущихся целей
как пассивная помеха и на индикаторе радиолокатора такая цель отображаться не будет.
Радиальная скорость Калькулятор
| Search | ||
| Дом | Инженерное дело ↺ | |
| Инженерное дело | Электроника ↺ | |
| Электроника | Радиолокационная система ↺ | |
| Радиолокационная система | Параметр радара ↺ |
|
✖Доплеровская частота является мерой частоты в радаре.ⓘ Доплеровская частота [D.f] |
+10% -10% |
||
|
✖Лямбда — это постоянное значение, которое умножается на соответствующие координаты точек вектора b, которые позже добавляются к соответствующим координатам точки a, чтобы получить точку r на линии.ⓘ лямбда [λ] |
+10% -10% |
|
✖Радиальная скорость объекта относительно данной точки — это скорость изменения расстояния между объектом и точкой.ⓘ Радиальная скорость [ur] |
⎘ копия |
Радиальная скорость Решение
ШАГ 0: Сводка предварительного расчета
ШАГ 1. Преобразование входов в базовый блок
Доплеровская частота: 10.3 Герц —> 10.3 Герц Конверсия не требуется
лямбда: 3 —> Конверсия не требуется
ШАГ 2: Оцените формулу
ШАГ 3: Преобразуйте результат в единицу вывода
15.45 метр в секунду —> Конверсия не требуется
18 Параметр радара Калькуляторы
Радиальная скорость формула
Радиальная скорость = Доплеровская частота*лямбда/2
ur = D.f*λ/2
Что такое лучевая скорость при эффекте Доплера?
Таким образом, доплеровский сдвиг говорит вам о движении в определенном направлении по радиусу воображаемой сферы. По этой причине скорость, которую вы можете вычислить по сдвигу длины волны, называется радиальной скоростью. Во время обращения планеты скорость ее звезды постоянна.
Радиа́льная ско́рость (в астрономии — лучева́я ско́рость) — проекция скорости точки (на рисунке — A) на прямую (OA), соединяющую её с выбранным началом координат (O).

В цилиндрической (и полярной) и сферической системах координат — одна из компонент скорости (другая компонента — азимутальная (трансверсальная) скорость).
Таким образом, она является обобщённой скоростью в этих системах координат.
По определению, радиальная скорость является скаляром и находится по формуле:
[math]displaystyle{ v_r=vec{v}cdotvec{e}_r }[/math],
где [math]displaystyle{ vec{e}_r=frac{vec{r}}{left|vec{r}right|} }[/math] — орт радиус-вектора.
При этом полная скорость складывается из радиальной и азимутальной частей:
[math]displaystyle{ vec{v} = v_r cdot vec{e}_r + vec{v_{phi}} }[/math].
Если выразить в координатах, то радиальная скорость всегда равна
[math]displaystyle{ v_r=frac{dr}{dt}=dot{r} }[/math]
Если взять одну из двух точек за начало координат, то радиальная скорость будет определять скорость сближения (если [math]displaystyle{ v_rlt 0 }[/math]), либо скорость отдаления (если [math]displaystyle{ v_rgt 0 }[/math]) этих точек друг от друга. Согласно этому в астрономии, где началом отсчёта (точкой, где находится наблюдатель) до настоящего времени является Земля, лучевая скорость определяется как скорость объекта (обычно — астрономического) в направлении луча зрения. Эта величина поддаётся измерению с учётом эффекта Доплера. Например, спектр с высоким разрешением позволяет сравнить измеренные длины волн известными спектральными линиями и определить красное смещение [math]displaystyle{ z }[/math], вместе с ним и лучевую скорость [math]displaystyle{ cz }[/math], где [math]displaystyle{ c }[/math] — скорость света[1].
Примечания
- ↑ Compilation of cz (radial velocity) measurements Архивная копия от 24 февраля 2020 на Wayback Machine // HyperLeda
Ссылки
- Lindegren, Lennart (April 2003). «The fundamental definition of «radial velocity»». Astronomy and Astrophysics 401 (3): 1185–1201. arXiv:astro-ph/0302522. doi:10.1051/0004-6361:20030181. Bibcode: 2003A&A…401.1185L.
- (1999) «Astrometric radial velocities. I. Non-spectroscopic methods for measuring stellar radial velocity». Astron. Astrophys. 348: 1040–1051. arXiv:astro-ph/9907145. Bibcode: 1999A&A…348.1040D.
-
Принцип определения рлс дальности до цели
 Основывается
Основывается
на прямолинейном равномерном
распространении радиоволн со скоростью .
.


Принцип определения дальности: для
определения дальности необходимо
измерить время распространения сигнала
от цели до радиолокатора
 и полученную оценку
и полученную оценку пересчитать в оценку дальности
пересчитать в оценку дальности .
.

 – время распространения сигнала от
– время распространения сигнала от
цели до радиолокатора (время запаздывания
сигнала), определяется в результате
сравнения по времени принимаемого
сигнала с излучаемым. Если
Если измерить, то можно рассчитать дальность
измерить, то можно рассчитать дальность
до цели.
-
Принцип определения рлс направления на цель
Принцип
определения угловой координаты
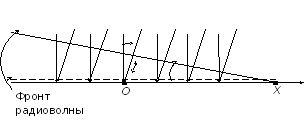
Принцип
измерения угловой координаты основан
на том, что радиоволны в точке
 и точке
и точке при
при проходят различные расстояния
проходят различные расстояния и
и
 – разница расстояний.
– разница расстояний.
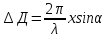
Это
значит, что радиоволны, приходящие в
точку
 и точку
и точку отличаются по фазе на величину
отличаются по фазе на величину

Это
при приёме сигнала в двух точках. При
использовании непрерывной апертуры
вдоль оси
 (непрерывного множества точек) следует
(непрерывного множества точек) следует
рассматривать непрерывное распределение По
По
определению пространственной частоты получаем:
получаем:

 универсальный принцип определения
универсальный принцип определения
угловой координаты.
При
двух точках:

Для определения
угловой координаты требуется знание
 или частоты
или частоты .
.
Знание о времени излучения не требуется.
Принцип
определения угловой скорости ( и
и ):
):
Принципиально
по радиолокационному сигналу можно
определить угловые скорости следующим
образом:
 — скорость изменения
— скорость изменения


Однако при
посадке самолёта угловые скорости
невелики и алгоритмы управления
самолётами при посадке не требуют знания
угловых скоростей. Поэтому радиолокационные
средства посадки угловые скорости не
измеряют.
-
Принцип определения рлс радиальной скорости цели
Основан
на Доплеровском эффекте радиоволн.




 – принцип определения радиальной
– принцип определения радиальной
скорости
при
известной
 .
.
Принцип
определения радиальной скорости:
необходимо измерить доплеровское
изменение частоты
 и полученную оценку
и полученную оценку пересчитать в оценку скорости
пересчитать в оценку скорости .
.
Определение (а значит и
(а значит и )
)
возможно только при известной частоте
излучаемого сигнала .
.
-
Параметры входного сигнала рлс соответствующие координатам и скоростям движения
Методы
определения параметров Р.С.(координат,
скоростей).






-
Основные методы радиолокации, их принципиальные отличия
По
своей физической природе радиолокационный
сигнал может быть трёх видов:
1)
радиолокационный сигнал, излучаемый
РПД, установленный на цели (или самой
целью) независимо от радиолокатора
 излучаемый сигнал
излучаемый сигнал
2)
радиолокационный сигнал, излучаемый
РПД цели по запросу радиолокатора
 ответный сигнал
ответный сигнал
3)радиолокационный
сигнал, отражаемый целью при облучении
её радиолокатора.
В
зависимости от типа, используемого
радиолокационного сигнала различают:
Пассивный
метод радиолокации
Метод
активного ответа (радиолокация по
ответному сигналу)
Метод
пассивного ответа (радиолокация по
отражённому сигналу)
Пассивный
метод радиолокации
 –номинальная
–номинальная
частота
 –?
–?
истинная частота
Измерение
дальности (невозможно при этом методе)

 , где неизвестное
, где неизвестное !
!
Измерение
радиальной скорости (невозможно при
этом методе)

 где неизвестная
где неизвестная .
.
Измерение
угловых координат
В принципе
возможно, опускается sin.


Опорное
значение всегда известно!
Метод
активного ответа
Измерение
дальности


 где
где
 где
где
 —
—
время запаздывания ответного сигнала
относительно запросного
 – время прохождения запросного сигнала
– время прохождения запросного сигнала
по цепям ответчика
Измерение
радиальной скорости


Измерения
доплеровской частоты возможно только
в том случае если частота запросного
сигнала в ответчике не изменяется





Измерение
угловых координат
Производится
путём принципа определения угловых
координат.
Значит,
радиальная скорость
 может быть измерена, если запросный
может быть измерена, если запросный
сигнал проходит по цепям ответчика без
изменения радиальной частоты. Однако
часто для засекречивания сигнала
добавляется кодовая добавка (кодовое
(кодовое
изменение частоты), как правило,
неизвестная. В этой ситуации измерение
радиальной скорости невозможно.
Метод
пассивного ответа (по отраженному
сигналу).

Измерение
дальности

 считаем что отражение минимально
считаем что отражение минимально


 – время запаздывания отражённого
– время запаздывания отражённого
сигнала относительно зондирующего
Измерение
радиальной скорости




Измерение
угловых координат


Далее
считаем что основным методом радиолокации
является метод пассивного ответа. Этот
метод является универсальным и позволяет
обнаружить цели и определить их координаты
независимо от того свои это самолёты
или чужие.
В
качестве второго метода радиолокации
посадки используется метод активного
ответа, но он может работать только по
самолётам с самолётными ответчиками.
При использовании второго метода
запросный и ответный сигналы кодируются
по частоте. Т.к. кодовые частоты неизвестны,
измерение радиальной скорости не
производится(невозможно). Время
запаздывания в ответчике (время ответа)
учитывается для каждого типа С.О.(самолётн.
ответчики) отдельно. Незнание
 приводит к ошибкам измерения дальности
приводит к ошибкам измерения дальности
(500-1000 м.)
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #