При исследовании поведения систем частиц, часто удобно использовать для описания движения такую точку, которая характеризует положение и движение рассматриваемой системы как единого целого. Такой точкой служит центр масс.
Для однородных тел обладающих симметрией центр масс часто совпадает с геометрическим центром тела. В однородном изотропном теле одной выделенной точке найдется симметричная ей точка.
Предположим, что у нас имеются две частицы с равными массами, им соответствуют радиус-векторы: $<overline>_1 и <overline>_2$ . В этом случае центр масс расположен посередине между частицами. Центр масс (точка C) определён радиус-вектором $<overline>_C$ (рис.1).
Можно ожидать, что вместе с геометрическим центром системы радиус-вектор, которого равен $<overline>_C,$ играет роль точка, положение которой определяет распределение массы. Ее определяют так, чтобы вклад каждой частицы был пропорционален ее массе:
Радиус -вектор $<overline>_C$, определенный выражением (2) — средне взвешенная величина радиус-векторов частиц $<overline>_1$ и $<overline>_2$. Это становится очевидным, если формулу (2) представить в виде:
Выражение (3) показывает, что радиус-вектор каждой частицы входит в $<overline>_C$ с весом, который пропорционален его массе.
Выражение (3) легко обобщается для множества материальных точек, которые расположены произвольным образом.
Если положения N материальных точек системы задано при помощи их радиус-векторов, то радиус — вектор, определяющий положение центра масс находим как:
Выражение (4) считают определением центра масс системы.
Формулы (4-7) совпадают с формулами, которые используют для определения тяжести тела. В том случае, если размеры тела малы в сравнении с расстоянием до центра Земли, центр тяжести считают совпадающим с центром масс тела. В большинстве задач центр тяжести совпадает с центром масс тела.
где $overline
$ — суммарный импульс системы частиц; $M$ масса системы. Выражение (8) справедливо при движениях со скоростями которые существенно меньше скорости света.
Если система частиц является замкнутой, то сумма импульсов ее частей не изменяется. Следовательно, скорость центра масс при этом величина постоянная. Говорят, что центр масс замкнутой системы перемещается по инерции, то есть прямолинейно и равномерно, и это движение не зависимо от движения составных частей системы. В замкнутой системе могут действовать внутренние силы, в результате их действия части системы могут иметь ускорения. Но это не оказывает влияния на движение центра масс. Под действием внутренних сил скорость центра масс не изменяется.
Примеры задач на определение центра масс
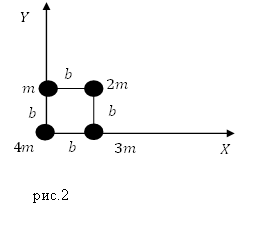
Задание. Система составлена из материальных точек (рис.2), запишите координаты ее центра масс?
Решение. Рассмотрим рис.2. Центр масс системы лежит на плоскости, значит, у него две координаты ($x_c,y_c$). Найдем их используя формулы:
Вычислим массу рассматриваемой системы точек:
Тогда абсцисса центра масс $x_ $равна:
Ответ. $x_c=0,5 b$; $y_с=0,3 b$
Задание. Космонавт, имеющий массу $m$, неподвижен относительно корабля массы $M$. Двигатель космического аппарата выключен. Человек начинает подтягиваться к кораблю при помощи легкого троса. Какое расстояние пройдет космонавт ($s_1$), какое корабль ($s_2$) до точки встречи? В начальный момент расстояние между ними равно $s$.
Решение. Центр масс корабля и космонавта лежит на прямой, соединяющей эти объекты.
В космосе, где внешние силы отсутствуют, центр масс замкнутой системы (корабль-космонавт) либо покоится, либо движется с постоянной скоростью. В избранной нами (инерциальной) системе отсчета он покоится. При этом:
Если r и m радиус вектор и масса
Глава 14. Теоремы о движении центра масс и об изменении количества движения и кинетического момента.
14.1. Теорема о движении центра масс.
14.1.1. Положение центра масс С механической системы массой m = 50 кг определяется радиусом-вектором rс = 3i + 4j + 5k. Опрeделить статический момент масс этой системы относительно плоскости Оху. (Ответ 250)
14.1.2. Определить координату хс центра масс кривошипно-ползунного механизма при углах φ = 90 о и α = 30°, если масса кривошипа 1 равна 4 кг, а масса шатуна 2 равна 8 кг. Шатун 2 длиной 0,8 м считать однородным стержнем. Массой ползуна 3 пренебречь. (Ответ 0,231)
14.1.3. Тело массой m = 2 кг движется по горизонтальным направляющим согласно закону s = 2t 2 + 1. Определить модуль главного вектора внешних сил, действующих на тело. (Ответ 
14.1.4. Тело 1 массой m = 50 кг поднимается по наклонной плоскости с помощью троса, наматываемого на барабан 2 радиуса R = 0,4 м. Определить модуль главного вектора внешних сил, действующих на тело 1, если угловое ускорение барабана ϵ = 5 рад/с 2 . (Ответ 100)
14.1.5. Механическая система движется так, что проекции ускорения ее центра масс С на оси координат равны аСх = 1 м/с 2 , аСу = 2 м/с 2 , aCz = 4 м/с 2 . Определить модуль главного вектора внешних сил, действующих на систему, если масса системы m = 40 кг. (Ответ 183)
14.1.6. Движение центра масс механической системы определяется радиусом-вектором rс = 2 cos πti + 2 sin πtj. Определить проекцию на ось Оу главного вектора внешних сил в момент времени t = 0,5 с, если масса системы m = 10 кг. (Ответ -197)
14.1.7. Диск массой m = 20 м вращается равномерно вокруг неподвижной оси с угловой скоростью ω = 10 рад/с. Определить модуль главного вектора внешних сил, приложенных к диску, если его центр тяжести удален от оси вращения на расстояние ОС = 0,5 см. (Ответ 10)
14.1.8. Центр масс колеса С движется по окружности радиуса R = 1,3 м согласно закону s = 4t. Определить модуль главного вектора внешних сил, приложенных к колесу, если его масса m = 15 кг. (Ответ 185)
14.1.9. Кривошип 1 шарнирного параллелограмма вращается равномерно с угловой скоростью ω1 = 5 рад/с. Определить модуль главного вектора внешних сил, действующих на звено 2, если его масса m = 8 кг, длина ОА = 0,4 м. (Ответ 80)
14.1.10. Однородный равносторонний треугольник ОАВ массой m = 5 кг вращается равномерно вокруг неподвижной оси. Определить его угловую скорость ω, если главный вектор внешних сил, действующих на него, равен 300Н, а длина l = 0,4 м. (Ответ 16,1)
14.1.11. Шкив 2 радиуса R = 0,2 м, вращаясь с угловым ускорением ϵ2 = 10 рад/с 2 , поднимает однородный цилиндр 1, масса которою m = 50 кг. Определить модуль главного вектора внешних сил, действующих на цилиндр. (Ответ 50)
14.1.12. Однородный диск радиуса R = 0,5 м, масса которого m = 20 кг, вращается с постоянным угловым ускорением ϵ = 10 рад/с 2 . Определить модуль главного вектора внешних сил, действующих на диск. (Ответ 0)
14.1.13. Однородный стержень ОА массой m = 10 кг вращается равномерно с угловой скоростью ω = 10 рад/с. Определить модуль главного вектора внешних сил, действующих на стержень, если его длина ОА = 1 м. (Ответ 500)
14.1.14. Ползун А движется под действием силы F с постоянной скоростью vA. Определить реакцию направляющей на ползун А в тот момент времени, когда ускорение ползуна В равно ав = 4 м/с 2 , если масса однородного стержня АВ равна 5 кг. Массой ползунов пренебречь.
(Ответ 10)
14.1.15. Кривошип 1 длиной ОА = 0,25 м, вращаясь равномерно с угловой скоростью ω = 10 рад/с, приводит в движение кулису 2, масса которой m = 5 кг. Определить модуль главного вектора внешних сил, действующих на кулису в момент времени, когда угол φ = 60°.
(Ответ 62,5)
14.1.16. Определить модуль главного вектора внешних сил, действующих на шатун АВ кривошипно-ползунного механизма в момент времени, когда угол φ = 180°, а точки А и В имеют ускорения аА = 10 м/с 2 , ав = 14 м/с 2 . Шaтун массой m = 5 кг считать однородным стержнем. (Ответ 60)
14.1.17. Определить проекцию ускорения центра масс С механической системы на ось Оу в момент времени, когда координата уС = 0.8 м, если масса системы m = 10 кг, а главный вектор приложенных внешних сил R e = 3i + 6tj. В начальный момент времени центр масс системы находился в точке О в покое. (Ответ 1,2)
14.1.18. Тело 1 массой 4 кг может двигаться по горизонтальной направляющей. На какое расстояние переместится тело 1, когда однородный стержень 2 массой 2 кг и длиной l = 0,6 м. опускаясь под действием силы тяжести, займет вертикальное положение. В начальный момент система находилась в покое. (Ответ 0,1)
14.1.19. Тело 1 массой m1 = 0,7 кг может двигаться по горизонтальной направляющей. Определить модуль ускорения тела 1 в момент времени t = 0,25 с, если относительно него под действием внутренних сил системы движется тело 2 массой m2 = 0,1 кг согласно уравнению s = sin 4t. (Ответ 0,841)
14.1.20. На тело 1 действует постоянная сила F = 10Н. Определить ускорение этого тела в момент времени t = 0,5 с, если относительно него под действием внутренних сил системы движется тело 2 согласно уравнению x = cos πt. Массы тел: m1 = 4 кг, m2 = 1 кг. Тела движутся поступательно. (Ответ 2)
14.1.21. Определить ускорение тела 1, скользящего но гладкой наклонной плоскости, если в горизонтальных направляющих относительно него под действием внутренних сил системы движется тело 2 согласно уравнению x = t 2 . Массы тел: m1 = m2 = 1 кг. Тела движутся поступательно. (Ответ 4,04)
Вектор скорости и ускорения материальной точки и их модули. Пример решения задач.
В очередной раз меня попросили решить пару задачек по физике, и я вдруг обнаружил, что не могу решить их с ходу. Немного погуглив, я обнаружил, что сайты в топе выдачи содержат сканы одного и того же учебника и не описывают конкретных примеров решений задачи о том, как найти вектор скорости и ускорения материальной точки. По-этому я решил поделиться с миром примером своего решения.
Траектория движения материальной точки через радиус-вектор
Подзабыв этот раздел математики, в моей памяти уравнения движения материальной точки всегда представлялись при помощи знакомой всем нам зависимости y(x) , и взглянув на текст задачи, я немного опешил когда увидел векторы. Оказалось, что существует представление траектории материальной точки при помощи радиус-вектора – вектора, задающего положение точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.

Формула траектория движения материальной точки помимо радиус-вектора описывается так же ортами – единичными векторами i, j , k в нашем случае совпадающими с осями системы координат. И, наконец, рассмотрим пример уравнения траектории материальной точки (в двумерном пространстве):

Что интересного в данном примере? Траектория движения точки задается синусами и косинусами, как вы думаете, как будет выглядеть график в всем нам знакомом представлении y(x) ? “Наверное какой-то жуткий”, подумали вы, но все не так сложно как кажется! Попробуем построить траекторию движения материальной точки y(x), если она движется по представленному выше закону:

Здесь я заметил квадрат косинуса, если вы в каком-нибудь примере видите квадрат синуса или косинуса, это значит что нужно применять основное тригонометрическое тождество, что я и сделал (вторая формула) и преобразовал формулу координаты y, чтобы вместо синуса подставить в нее формулу изменения x:

В итоге жуткий закон движения точки оказался обычной параболой, ветви которой направлены вниз. Надеюсь, вы поняли примерный алгоритм построения зависимости y(x) из представления движения через радиус-вектор. Теперь перейдем к нашему главному вопросу: как же найти вектор скорости и ускорения материальной точки, а так же их модули.
Вектор скорости материальной точки

Всем известно, что скорость материальной точки – это величина пройденного пути точкой за единицу времени, то есть производная от формулы закона движения. Чтобы найти вектор скорости нужно взять производную по времени. Давайте рассмотрим конкретный пример нахождения вектора скорости.
Пример нахождения вектора скорости
Имеем закон перемещения материальной точки:

Теперь нужно взять производную от этого многочлена, если вы забыли как это делается, то вот вам таблица производных различных функций. В итоге вектор скорости будет иметь следующий вид:

Все оказалось проще, чем вы думали, теперь найдем вектор ускорения материальной точки по тому же самому закону, представленному выше.
Как найти вектор ускорения материальной точки

Вектор ускорения точки это векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Чтобы найти вектор ускорения материальной точки в нашем примере, нужно взять производную, но уже от формулы вектора скорости, представленной чуть выше:

Модуль вектора скорости точки
Теперь найдем модуль вектора скорости материальной точки. Как вы знаете из 9-го класса, модуль вектора – это его длина, в прямоугольных декартовых координатах равна квадратному корню из суммы квадратов его координат. И откуда же из полученного нами выше вектора скорости взять его координаты спросите вы? Все очень просто:

Теперь достаточно только подставить время, указанное в задаче и получить конкретное числовое значение.
Модуль вектора ускорения
Как вы поняли из написанного выше (и из 9-го класса), нахождение модуля вектора ускорения происходит тем же образом, что и модуля вектора скорости: извлекаем корень квадратный из суммы квадратов координат вектора, все просто! Ну и вот вам, конечно же, пример:

Как вы видите, ускорение материальной точки по заданному выше закону не зависит от времени и имеет постоянную величину и направление.
Еще примеры решений задачи нахождения вектора скорости и ускорения
А вот тут вы можете найти примеры решения и других задач по физике на тему “механика твердых тел”. А для тех, кто не совсем понял как найти вектор скорости и ускорения, вот вам еще парочка примеров из сети без всяких лишних объяснений, надеюсь, они вам помогут.

Если у вас возникли какие-нибудь вопросы, вы можете задать их в комментариях.
http://www.zachet.ca/termech/kepe/kepe_d8.php
http://artsybashev.ru/zadachki-s-resheniem/vektor-skorosti-i-uskoreniya-materialnoi-tochki/
Кинематика
занимается описанием движения без
выяснения его причин.
Материальной
точкой называют физическую модель
такого реального объекта, размерами
которого можно пренебречь в конкретной
задаче.
Прямая
задача кинематики — определить положение
тела в любой момент времени. Если речь
идёт о движении материальной точки, это
означает — определить зависимость
радиус-вектора точки от времени
![]()
по известному ускорению
![]() .
.
Для этого необходимо знать начальные
условия — положение и скорость материальной
точки в начальный момент времени (t = 0).
Существуют
три основных способа описания движения:
векторный, координатный и естественный.
1. Векторный способ
В
этом способе положение материальной
точки задают радиус-вектором
![]() ,
,
проведенным из некоторой неподвижной
точки, называемой началом отсчета.
Рассмотрим
алгоритм решения прямой задачи кинематики
при векторном способе описания движения.
По
известному ускорению материальной
точки, находят скорость точки в
произвольный момент времени
![]() .
.
Постоянные
интегрирования определяются, исходя
из начальных условий (см. в примерах).
Определив
![]() ,
,
находят зависимость радиус-вектора от
времени
![]() .
.
Если
в задаче требуется определить модуль
скорости тела, то он определяется как:
![]() ,
,
где
![]()
— проекции скорости на оси X,
Y,
Z
соответственно (их также можно называть
составляющими скорости по названным
осям).
Путь,
пройденный телом, определяется из
определения модуля скорости
![]()
как
![]() .
.
Решение задач
1.1.
Положение материальной точки определяется
в момент времени t = 0
радиус-вектором
![]() ,
,
вектором скорости
![]()
и постоянным ускорением
![]() ,
,
направленным перпендикулярно скорости
![]() .
.
Найти временную зависимость радиус-вектора
![]() ,
,
вектора скорости
![]()
и модуля скорости точки.
Решение.
Скорость
точки в произвольный момент времени
равна
![]() .
.
По
условию задачи
![]() при
при
t = 0,
следовательно,
![]() .
.
Поэтому
![]()
Зависимость
радиус-вектора точки определяется
выражением
![]()
Учитывая,
что по условию
![]() при
при
t = 0
находим
![]() .
.
Тогда
![]()

Так
как
![]()
![]()
(рис.1), зависимость от времени модуля
скорости тела определяется выражением
![]()
В
разобранной задаче была рассмотрена
прямая задача кинематики — по известному
ускорению и начальным условиям было
найдено местоположение материальной
точки в произвольный момент времени.
Однако, во многих случаях возникает и
обратная задача: по известному закону
![]()
определить
![]()
и
![]() .
.
Если прямая задача выполнялась с помощью
математической операции интегрирования,
то обратная требует применения
дифференцирования.
1.2.
Радиус-вектор частицы меняется со
временем по закону
![]() ,
,
где
![]()
— постоянный вектор,
![]()
— положительная постоянная. Найти:
а)
скорость
![]()
и ускорение
![]()
частицы в зависимости от времени;
б)
промежуток времени Δt,
по истечении которого частица вернётся
в исходную точку;
в)
путь S,
который она пройдёт при этом.
Решение.
а) По
определению скорость и ускорение в
произвольный момент времени соответственно
равны
![]() ,
,
![]() .
.
б)
По истечении времени Δt
частица
вернется в исходную точку, поэтому
ее радиус-вектор равен нулю:
![]() ,
,
![]() ,
,
откуда
![]() .
.
в) Путь, пройденный
частицей, определяется соотношением
![]() .
.
Модуль
скорости
![]()
— величина всегда положительная. Направим
ось X
вдоль вектора
![]() ,
,
тогда
![]() ,
,
![]()
при
![]()
и
![]() ,
,
![]()
при
![]()
и
![]() .
.
На
промежутке от 0 до t1:
 .
.
На
промежутке от t1
до Δt:
Путь, пройденный
частицей
![]() .
.
1.3*.
В момент t = 0
частица вышла из начала координат в
положительном направлении оси
![]() .
.
Её скорость меняется со временем по
закону
![]() ,
,
где
![]()
— начальная скорость,
![]()
— некоторая положительная постоянная.
Найти:
а) ускорение и
радиус-вектор;
б)
моменты времени, когда частица проходит
точку, удаленную на расстояние
![]()
от начала координат в случае, если
![]() ,
,
где
![]()
максимальное удаление точки от начала
отсчета оси
![]() .
.
Решение.
а)
Продифференцировав
![]()
по времени, получим ускорение частицы
![]() .
.
Представим
радиус-вектор частицы как
![]() .
.
По
условию
![]() при
при
t = 0,
поэтому
![]()
и
![]() .
.
б)
Поскольку частица движется вдоль оси
![]() ,
,
то ее положение определяется координатой
![]() ,
,
которая является проекцией вектора
![]() и
и
равна:
![]() .
.
Найдем
максимальную координату
![]() ,
,
приравняв производную
![]()
нулю:
![]() ,
,
![]()
и
по условию
![]() .
.
Покажем,
что найденное значение
![]()
действительно является максимумом. Для
этого найдем вторую производную
![]()
и сравним ее с нулем
![]() .
.
Из
полученного результата видно, что
![]() ,
,
следовательно,
![]()
действительно является максимальным
удалением точки от начала отсчета оси
![]() .
.
Т аким
аким
образом, в момент времени
![]()
координата частицы равна
![]() ,
,
и частица меняет направление своего
движения на противоположное (рис.2). На
расстоянии
![]()
от начала координат частица будет
находиться в моменты времени, когда
![]() ,
,
то есть
 ,
,
![]() .
.
Подставив
в это выражение
![]()
для определения t,
получим квадратные уравнения
![]() ,
,
или
![]() .
.
Решая уравнения,
получим искомые значения времени
![]() ,
,
![]() .
.
Отметим,
что для существования первых двух корней
необходимо, чтобы
![]() ,
,
то есть
![]() ,
,
что соответствует условию задачи. Один
из полученных корней
![]()
является отрицательным и физического
смысла не имеет. Итак, частица проходит
точку, удаленную на расстояние
![]()
от начала координат, в момент времени
![]()
(до
поворота частицы)
и в моменты времени
 (после
(после
поворота частицы).
1.4.
Радиус-вектор меняется со временем по
закону
![]() ,
,
![]()
и
![]()
— положительные постоянные,
![]()
и
![]()
— орты осей
X
и Y.
Найти:
а)
уравнение траектории точки y(x);
б)
зависимость от времени скорости
![]() ,
,
ускорения
![]()
и модулей этих величин;
в)
зависимость от времени угла
![]()
между скоростью и ускорением.
Решение.
а) Спроецируем
вектор
![]()
на оси X,
Y
и Z
и получим
зависимости координат от времени
![]() ,
,
![]() ,
,
![]() .
.
Исключив
из полученной системы уравнений время
![]() ,
,
получим уравнение траектории ![]() .
.
Из
которого видно, что траектория движения
— парабола. График функции y(x)
в плоскости XY
схематично изображен на рис.3.
б) По определению
![]() ,
,
то есть
![]() ,
, ![]() .
.
![]() ,
,
поэтому
![]() ,
, ![]() .
.
Модули скорости
и ускорения равны
![]() ,
,
![]() .
.
в )
)
Как видно из рис.3, угол
![]()
между скоростью и ускорением равен в
данной задаче углу между скоростью
![]()
и её составляющей по оси Y
![]() ,
,
Откуда
![]() .
.
В
данной задаче угол
![]()
между векторами
![]() ,
,
ускорения
![]()
можно определить другим, более
универсальным способом, используя
свойство скалярного произведения двух
векторов:
![]() .
.
Из которого следует,
что
![]() .
.
Откуда
![]() .
.
Учитывая,
что согласно вспомогательному
тригонометрическому тождеству
![]() ,
,
приведем полученный результат к виду
![]()
![]()
![]() ,
,
что
совпадает с результатом полученным
ранее.
Однако,
этот универсальный способ часто
оказывается достаточно громоздким.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Определение центра масс, теория и онлайн калькуляторы
Определение центра масс
При исследовании поведения систем частиц, часто удобно использовать для описания движения такую точку, которая характеризует положение и движение рассматриваемой системы как единого целого. Такой точкой служит центр масс.
Для однородных тел обладающих симметрией центр масс часто совпадает с геометрическим центром тела. В однородном изотропном теле одной выделенной точке найдется симметричная ей точка.
Радиус-вектор и координаты центра масс
Предположим, что у нас имеются две частицы с равными массами, им соответствуют радиус-векторы: ${overline{r}}_1 и {overline{r}}_2$ . В этом случае центр масс расположен посередине между частицами. Центр масс (точка C) определён радиус-вектором ${overline{r}}_C$ (рис.1).
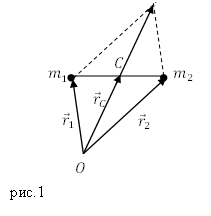
Из рис.1 видно, что:
[{overline{r}}_C=frac{{overline{r}}_1+ {overline{r}}_2}{2}left(1right).]
Можно ожидать, что вместе с геометрическим центром системы радиус-вектор, которого равен ${overline{r}}_C,$ играет роль точка, положение которой определяет распределение массы. Ее определяют так, чтобы вклад каждой частицы был пропорционален ее массе:
[{overline{r}}_C=frac{{overline{r}}_1m_1+ {overline{r}}_2m_2}{m_1+m_2}left(2right).]
Радиус -вектор ${overline{r}}_C$, определенный выражением (2) — средне взвешенная величина радиус-векторов частиц ${overline{r}}_1$ и ${overline{r}}_2$. Это становится очевидным, если формулу (2) представить в виде:
[{overline{r}}_C=frac{m_1}{m_1+m_2}{overline{r}}_1+frac{m_2}{m_1+m_2}{overline{r}}_2left(3right).]
Выражение (3) показывает, что радиус-вектор каждой частицы входит в ${overline{r}}_C$ с весом, который пропорционален его массе.
Выражение (3) легко обобщается для множества материальных точек, которые расположены произвольным образом.
Если положения N материальных точек системы задано при помощи их радиус-векторов, то радиус — вектор, определяющий положение центра масс находим как:
[{overline{r}}_c=frac{sumlimits^N_{i=1}{m_i{overline{r}}_i}}{sumlimits^N_{i=1}{m_i}}left(4right).]
Выражение (4) считают определением центра масс системы.
При этом абсцисса центра масс равна:
[x_c=frac{sumlimits^N_{i=1}{m_ix_i}}{sumlimits^N_{i=1}{m_i}}left(5right).]
Ордината ($y_c$) центра масс и его аппликата ($z_c$):
[y_c=frac{sumlimits^N_{i=1}{m_iy_i}}{sumlimits^N_{i=1}{m_i}}left(6right).]
[z_c=frac{sumlimits^N_{i=1}{m_iz_i}}{sumlimits^N_{i=1}{m_i}}left(7right).]
Формулы (4-7) совпадают с формулами, которые используют для определения тяжести тела. В том случае, если размеры тела малы в сравнении с расстоянием до центра Земли, центр тяжести считают совпадающим с центром масс тела. В большинстве задач центр тяжести совпадает с центром масс тела.
Скорость центра масс
Выражение для скорости центра масс (${overline{v}}_c=frac{d{overline{r}}_c}{dt}$) запишем как:
[{overline{v}}_c=frac{m_1{overline{v}}_1+m_2{overline{v}}_2+dots +m_n{overline{v}}_n}{m_1+m_2+dots +m_n}=frac{overline{P}}{M}left(8right),]
где $overline{P}$ — суммарный импульс системы частиц; $M$ масса системы. Выражение (8) справедливо при движениях со скоростями которые существенно меньше скорости света.
Если система частиц является замкнутой, то сумма импульсов ее частей не изменяется. Следовательно, скорость центра масс при этом величина постоянная. Говорят, что центр масс замкнутой системы перемещается по инерции, то есть прямолинейно и равномерно, и это движение не зависимо от движения составных частей системы. В замкнутой системе могут действовать внутренние силы, в результате их действия части системы могут иметь ускорения. Но это не оказывает влияния на движение центра масс. Под действием внутренних сил скорость центра масс не изменяется.
Примеры задач на определение центра масс
Пример 2
Задание. Система составлена из материальных точек (рис.2), запишите координаты ее центра масс?
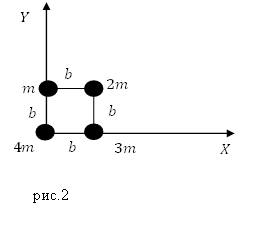
Решение. Рассмотрим рис.2. Центр масс системы лежит на плоскости, значит, у него две координаты ($x_c,y_c$). Найдем их используя формулы:
[left{ begin{array}{c}
x_c=frac{sumlimits_i{Delta m_ix_i}}{m};; \
y_с=frac{sumlimits_i{Delta m_iy_i}}{m}. end{array}
right.]
Вычислим массу рассматриваемой системы точек:
[m=m+2m+3m+4m=10 m.]
Тогда абсцисса центра масс $x_{c } $равна:
[x_c=frac{0cdot 4m+3mcdot b+2mcdot b}{10m}=0,5 b.]
Ордината $y_с$:
[y_с=frac{0cdot m+mcdot b+2mcdot b}{10m}=0,3 b.]
Ответ. $x_c=0,5 b$; $y_с=0,3 b$
Пример 2
Задание. Космонавт, имеющий массу $m$, неподвижен относительно корабля массы $M$. Двигатель космического аппарата выключен. Человек начинает подтягиваться к кораблю при помощи легкого троса. Какое расстояние пройдет космонавт ($s_1$), какое корабль ($s_2$) до точки встречи? В начальный момент расстояние между ними равно $s$.
Решение. Центр масс корабля и космонавта лежит на прямой, соединяющей эти объекты.
В космосе, где внешние силы отсутствуют, центр масс замкнутой системы (корабль-космонавт) либо покоится, либо движется с постоянной скоростью. В избранной нами (инерциальной) системе отсчета он покоится. При этом:
[frac{s_1}{s_2}=frac{m_2}{m_1}left(2.1right).]
По условию:
[s=s_1+s_2left(2.2right).]
Из уравнений (2.1) и (2.2) получаем:
[s_1=sfrac{m_2}{m_1+m_2};; s_2=sfrac{m_1}{m_1+m_2}.]
Ответ. $s_1=sfrac{m_2}{m_1+m_2};; s_2=sfrac{m_1}{m_1+m_2}$
Читать дальше: период и частота колебаний.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
To use your Google Account on a browser (like Chrome or Safari), turn on cookies if you haven’t already.
Important: If you get a message that cookies are turned off, you need to turn them on to use your account.
In Chrome
- On your computer, open Chrome.
- At the top right, click More
 Settings.
Settings. - Under «Privacy and security,» click Site settings.
- Click Cookies and site data.
- From here, you can:
- Turn on cookies: Next to «Blocked,» turn on the switch.
- Turn off cookies: Turn off Allow all cookies.
Learn how to change more cookie settings in Chrome.
In other browsers
For instructions, check the support website for your browser.
Why cookies are helpful
Cookies are files created by sites you visit. They make your online experience easier by saving browsing information. With cookies, sites can:
- Keep you signed in
- Remember your site preferences
- Give you locally relevant content
We use cookies to improve our services. To learn more, read our Privacy Policy.
Fix problems
If you can’t use your Google Account and get a message that cookies are turned off:
- Follow the steps above to turn on cookies.
- Try signing in again.
If you still get the error message, here are some possible solutions. Try each one, then try signing in.
- Open a new browser window.
- Clear your browser’s cache and cookies. Learn how to clear cache and cookies.
- Browse in private. Learn how to browse privately in Chrome.
- Change your browser’s privacy settings. Learn how to change privacy settings.
Was this helpful?
How can we improve it?