Skip to content
Длина вектора в пространстве
Длиной (или модулем) вектора называется расстояние между началом и концом вектора.
Длина вектора a{X,Y,Z} выражается через его координаты следующей формулой:
![]()
Пример
Длина вектора $aleft{ { — 2,3,sqrt 3 } right}$ равна
$left| a right| = sqrt {{X^2} + {Y^2} + {Z^2}} = $
$sqrt {{{left( { — 2} right)}^2} + {3^2} + {{left( {sqrt 3 } right)}^2}} = sqrt {16} = 4$
Расстояние между двумя точками в пространстве
Расстояние d между точками в пространстве A1{x1;y1;z1}, A2{x2;y2;z2} представляется формулой

Пример
Расстояние между точками A1{4;-6;3} и A2 {-1;5;-4}
$d = sqrt {{{left( {{x_2} — {x_1}} right)}^2} + {{left( {{y_2} — {y_1}} right)}^2} + {{left( {{z_2} — {z_1}} right)}^2}} = $
$=sqrt {{{left( { — 1 — 4} right)}^2} + {{left( {5 — left( { — 6} right)} right)}^2} + {{left( { — 4 — 3} right)}^2}} =$
$ =sqrt {25 + 121 + 49} = sqrt {195} approx 14$
![]() 12905
12905
Расстояние d между точками в пространстве A11;y1;z1>, A22;y2;z2> представляется формулой
Насколько публикация полезна?
Нажмите на звезду, чтобы оценить!
Средняя оценка 4.3 / 5. Количество оценок: 8
Оценок пока нет. Поставьте оценку первым.
3 комментария
найти расстояние между точками с(-2;1;-2) д (-1;2;1) м (-1;0;2) н (1;-1;2) найти 3 вектора сд — 2 вектора мн
Как найти расстояние через вектор
- +7 (953) 35-222-89
- Санкт-Петербург, Лиговский пр.52
- Kyziaha@gmail.com
Метод координат (расстояние между точкой и плоскостью, между прямыми)

Расстояние между точкой и плоскостью.
Расстояние между точкой и прямой.
Расстояние между двумя прямыми.
Первое, что полезно знать, это как найти расстояние от точки до плоскости:
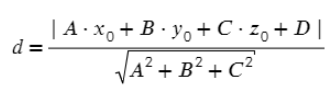
Значения A, B, C, D — коэффициенты плоскости
x, y, z — координаты точки
Задача. Найти расстояние между точкой А = (3; 7; −2) и плоскостью 4x + 3y + 13z — 20 = 0.
Все дано, можно сразу подставить значения в уравнение:

Задача. Найдите расстояние от точки К = (1; −2; 7) до прямой, проходящей через точки V = (8; 6; −13) и T = (−1; −6; 7).
- Находим вектор прямой.
- Вычисляем вектор, проходящий через искомую точку и любую точку на прямой.
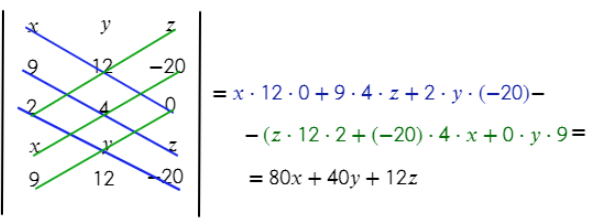
- Задаем матрицу и находим определитель по двум полученным векторам в 1-ом и 2-ом пункте.
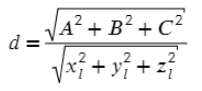
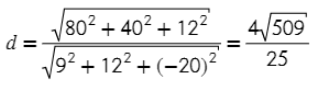
- Расстояние получим, когда квадратный корень из суммы квадратов коэффициентов матрицы поделим на длину вектора, который задает прямую (Думаю непонятно, поэтому перейдем к конкретному примеру).
1) TV = (8−(−1); 6−(−6); -13-7) = (9; 12; −20)
2) Вектор найдем через точки K и T, хотя так же можно было бы через K и V или любую другую точку на данной прямой.
TK = (1−(−1); −2−(−6); 7-7) = (2; 4; 0)
3) П олучится м атрица без коэффициента D (здесь он не нужен для решения):
 Если непонятно, как получить матрицу и ее определитель, смотрите здесь более подробный разбор.
Если непонятно, как получить матрицу и ее определитель, смотрите здесь более подробный разбор.
4) Плоскость получилась с коэффициентами А = 80, В = 40, С = 12,
x, y, z — координаты вектора прямой, в данном случае — вектор TV имеет координаты (9; 12; −20)
Задача. Найти расстояние между прямой, проходящей через точки Е = (1; 0; −2), G = (2; 2; −1), и прямой, проходящей через точки M = (4; −1; 4), L = (−2; 3; 0).
- Задаем векторы обеих прямых.
- Находим вектор, взяв по одной точке с каждой прямой.
- Записываем матрицу из 3-х векторов (две строчки из 1-го пункта, одна строчка из 2-го) и находим ее численный определитель.
- Задаем матрицу из двух первых векторов (в пункте 1). Первую строчку задаем как x, y, z.
- Расстояние получим, когда разделим получившееся значение из пункта 3 по модулю на квадратный корень из суммы квадратов пункта 4.
Перейдем к цифрам:
1) EG = (2−1; 2−0; −1−2) = (1; 2; −3)
ML = (−2−4; 3−(−1); 0−4) = (−6; 4; −4)
2) Найдем вектор EM (можно было так же найти EL или GM, или GL).
EM = (1−4; 0−(−1); −2−4) = (−3; 1; −6)
3) Составляем матрицу из трех выше найденных векторов и находим определитель. 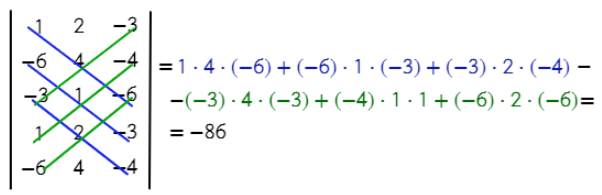
4) Составляем матрицу из первых двух выше найденных векторов и находим определитель
без коэффициента D (здесь он не нужен для решения).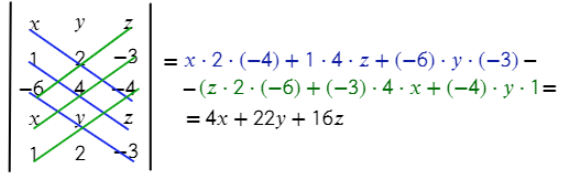
Вспомним, что уравнение плоскости задается так:
В нашем случае А = 4, В = 22, С = 16, D = 0.
5) Итоговая формула выглядит так, где L= −86 (из 3 пункта)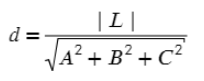
Векторы в пространстве и метод координат
Существует два способа решения задач по стереометрии
Первый — классический — требует отличного знания аксиом и теорем стереометрии, логики, умения построить чертеж и свести объемную задачу к планиметрической. Способ хорош тем, что развивает мозги и пространственное воображение.
Другой метод — применение векторов и координат. Это простые формулы, алгоритмы и правила. Он очень удобен, особенно когда времени до экзамена мало, а решить задачу хочется.
Если вы освоили векторы на плоскости и действия с ними — то и с векторами в пространстве разберетесь. Многие понятия окажутся знакомыми.
Система координат в пространстве
Выберем начало координат. Проведем три взаимно перпендикулярные оси X, Y и Z. Зададим удобный масштаб.

Получилась система координат в трехмерном пространстве. Теперь каждая его точка характеризуется тремя числами — координатами по X, Y и Z. Например, запись M(−1; 3; 2) означает, что координата точки M по X (абсцисса) равна −1, координата по Y (ордината) равна 3, а координата по Z (аппликата) равна 2.
Векторы в пространстве определяются так же, как и на плоскости. Это направленные отрезки, имеющие начало и конец. Только в пространстве вектор задается тремя координатами x, y и z:

Как найти координаты вектора? Как и на плоскости — из координаты конца вычитаем координату начала.

Длина вектора в пространстве – это расстояние между точками A и B. Находится как корень квадратный из суммы квадратов координат вектора.
Пусть точка M – середина отрезка AB. Ее координаты находятся по формуле:
Для сложения векторов применяем уже знакомые правило треугольника и правило параллелограмма

Сумма векторов, их разность, произведение вектора на число и скалярное произведение векторов определяются так же, как и на плоскости. Только координат не две, а три. Возьмем векторы и .
Произведение вектора на число:
Скалярное произведение векторов:
Косинус угла между векторами:
Последняя формула удобна для нахождения угла между прямыми в пространстве. Особенно если эти прямые – скрещиваются. Напомним, что так называются прямые, которые не параллельны и не пересекаются. Они лежат в параллельных плоскостях.
1. В кубе ABCDA1B1C1D1 точки E и K — середины ребер соответственно A1B1 и B1C1. Найдите косинус угла между прямыми AE и BK.
Если вам достался куб — значит, повезло. Он отлично вписывается в прямоугольную систему координат. Строим чертеж:

Длина ребра куба не дана. Какой бы она ни была, угол между AE и BK от нее не зависит. Поэтому возьмем единичный куб, все ребра которого равны 1.
Прямые AE и BK — скрещиваются. Найдем угол между векторами и . Для этого нужны их координаты.
Запишем координаты векторов:
и найдем косинус угла между векторами и :

2. В правильной четырехугольной пирамиде SABCD, все ребра которой равны 1, точки E, K — середины ребер SB и SC соответственно. Найдите косинус угла между прямыми AE и BK.
Лучше всего выбрать начало координат в центре основания пирамиды, а оси X и Y сделать параллельными сторонам основания.

Координаты точек A, B и C найти легко:
Из прямоугольного треугольника AOS найдем
Координаты вершины пирамиды:
Точка E — середина SB, а K — середина SC. Воспользуемся формулой для координат середины отрезка и найдем координаты точек E и K.
Найдем координаты векторов и
и угол между ними:
Покажем теперь, как вписать систему координат в треугольную призму:
3. В правильной треугольной призме ABCA1B1C1, все ребра которой равны 1, точка D — середина ребра A1B1. Найдите косинус угла между прямыми AD и BC1
Пусть точка A — начало координат. Возьмем ось X параллельно стороне BC, а ось Y перпендикулярно ей. Другими словами, на оси Y будет лежать отрезок AH, являющийся высотой треугольника ABC. Нарисуем отдельно нижнее основание призмы.

Запишем координаты точек:
Точка D — середина A1B1. Значит, пользуемся формулами для координат середины
отрезка.
Найдем координаты векторов и , а затем угол между ними:
Смотрите, как легко с помощью векторов и координат найти угол между прямыми. А если требуется найти угол между плоскостями или между прямой и плоскостью? Для решения подобных задач нам понадобится уравнение плоскости в пространстве.
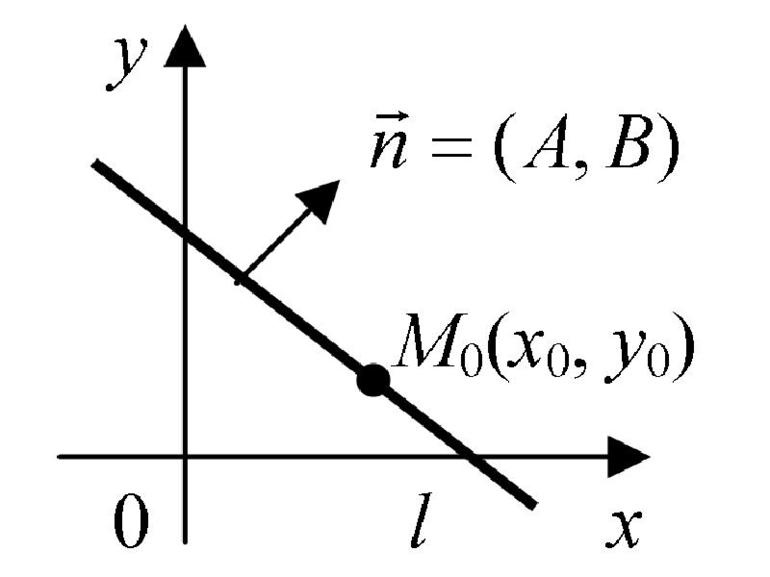
Плоскость в пространстве задается уравнением:
Здесь числа A, B и C — координаты вектора, перпендикулярного этой плоскости. Его называют нормалью к плоскости.

Вместо x, y и z можно подставить в уравнение координаты любой точки, принадлежащей данной плоскости. Получится верное равенство.
Плоскость в пространстве можно провести через любые три точки, не лежащие на одной прямой. Поэтому для того, чтобы написать уравнение плоскости, берем координаты трех принадлежащих ей точек. Подставляем их по очереди в уравнение плоскости. Решаем полученную систему.
Покажем, как это делается.
Напишем уравнение плоскости, проходящей через точки M (1; 0; 1), N (2; −2; 0) и K (4; 1; 2).
Уравнение плоскости выглядит так:
Подставим в него по очереди координаты точек M, N и K.
То есть A + C + D = 0.
Аналогично для точки K:
Получили систему из трех уравнений:
В ней четыре неизвестных: A, B, C и D. Поэтому одну из них мы выберем сами, а другие выразим через нее. Правило простое — вместо одной из переменных можно взять любое число, не равное нулю.
Пусть, например, D = −2. Тогда:
Выразим C и B через A и подставим в третье уравнение:
Решив систему, получим:
Уравнение плоскости MNK имеет вид:
Умножим обе части уравнения на −3. Тогда коэффициенты станут целыми:
Вектор — это нормаль к плоскости MNK.
Уравнение плоскости, проходящей через заданную точку имеет вид:
Угол между плоскостями равен углу между нормалями к этим плоскостям:
Не правда ли, знакомая формула? Скалярное произведение нормалей поделили на произведение их длин.
Заметим, что при пересечении двух плоскостей вообще-то образуется четыре угла.

Мы берем меньший из них. Поэтому в формуле стоит модуль скалярного произведения — чтобы косинус угла был неотрицателен.
4. В кубе ABCDA1B1C1D1 точки E и F — середины ребер соответственно A1B1 и A1D1. Найдите тангенс угла между плоскостями AEF и BDD1.
Строим чертеж. Видно, что плоскости AEF и BDD1 пересекаются где-то вне куба. В классическом решении пришлось бы строить линию их пересечения. Но векторно-координатный метод значительно всё упрощает. Не будем ломать голову над тем, по какой прямой пересекаются плоскости. Просто отметим координаты нужных нам точек и найдем угол между нормалями к плоскостям AEF и BDD1.

Сначала — нормаль к плоскости BDD1. Конечно, мы можем подставить координаты точек B, D и D1 в уравнение плоскости и найти коэффициенты, которые и будут координатами вектора нормали. А можем сделать хитрее — увидеть нужную нормаль прямо на чертеже. Ведь плоскость BDD1 — это диагональное сечение куба. Вектор перпендикулярен этой плоскости.
Итак, первый вектор нормали у нас уже есть:
Напишем уравнение плоскости AEF.
Берем уравнение плоскости и по очереди подставляем в него, вместо x, y и z, соответствующие координаты точек A, E и F.
Пусть С = -1. Тогда A = B = 2.
Уравнение плоскости AEF:
Нормаль к плоскости AEF:
Найдем угол между плоскостями:
5. Основание прямой четырехугольной призмы BCDA1B1C1D1 — прямоугольник ABCD, в котором AB = 5, AD = √33. Найдите тангенс угла между плоскостью грани AA1D1D и плоскостью, проходящей через середину ребра CD перпендикулярно прямой B1D, если расстояние между прямыми A1C1 и BD равно √3.
Эта задача наглядно показывает, насколько векторный метод проще классического. Попробуйте, для разнообразия, построить необходимые сечения и провести все доказательства — как это делается в «классике» 
Строим чертеж. Прямую четырехугольную призму можно по-другому назвать «параллелепипед».

Замечаем, что длина и ширина параллелепипеда у нас есть, а вот высота — вроде не дана. Как же ее найти?
«Расстояние между прямыми A1C1 и BD равно √3». Прямые A1C1 и BD скрещиваются. Одна из них — диагональ верхнего основания, другая — диагональ нижнего. Вспомним, что расстояние между скрещивающимися прямыми равно длине их общего перпендикуляра. Общий перпендикуляр к A1C1 и BD — это, очевидно, OO1, где O — точка пересечения диагоналей нижнего основания, O1 — точка пересечения диагоналей верхнего. А отрезок OO1 и равен высоте параллелепипеда.
Плоскость AA1 D1 D — это задняя грань призмы на нашем чертеже. Нормаль к ней — это любой вектор, перпендикулярный задней грани, например, вектор или, еще проще, вектор .
Осталась еще «плоскость, проходящая через середину ребра CD перпендикулярно прямой B1D». Но позвольте, если плоскость перпендикулярна прямой B1D — значит, B1D и есть нормаль к этой плоскости! Координаты точек B1 и D известны:
Координаты вектора — тоже:
Находим угол между плоскостями, равный углу между нормалями к ним:
Зная косинус угла, находим его тангенс по формуле
Получим:
Ответ:
Угол между прямой m и плоскостью α тоже вычисляется с помощью скалярного произведения векторов.
Пусть — вектор, лежащий на прямой m (или параллельный ей), — нормаль к плоскости α.

Находим синус угла между прямой m и плоскостью α по формуле:
6. В кубе ABCDA1B1C1D1 точка E — середина ребра A1B1. Найдите синус угла между прямой AE и плоскостью BDD1.
Как всегда, рисуем чертеж и выбираем систему координат

Находим координаты вектора .
Нужно ли нам уравнение плоскости BDD1? В общем-то, без него можно обойтись. Ведь эта плоскость является диагональным сечением куба, а значит, нормалью к ней будет любой вектор, ей перпендикулярный. Например, вектор .
Найдем угол между прямой и плоскостью:
Ответ:
Расстояние от точки M с координатами x0, y0 и z0 до плоскости α, заданной уравнением Ax + By + Cz + D = 0, можно найти по формуле:
7. В основании прямоугольного параллелепипеда BCDA1B1C1D1 лежит прямоугольник ABCD со сторонами AB = , AD = . Высота параллелепипеда AA1 = . Найдите расстояние от точки A до плоскости A1DB.
Построим чертеж и выпишем координаты точек:

Запишем уравнение плоскости A1DB. Вы помните, как это делается — по очереди подставляем координаты точек A1, D и B в уравнение Ax + Be + Cz + D
Решим эту систему. Выберем
Тогда
Уравнение плоскости A1DB имеет вид:
Дальше все просто. Находим расстояние от точки A до плоскости A1DB:
В некоторых задачах по стереометрии требуется найти расстояние от прямой до параллельной ей плоскости. В этом случае можно выбрать любую точку, принадлежащую данной прямой.
http://ik-study.ru/ege_math/zagholovok_stat_i0
http://ege-study.ru/ru/ege/materialy/matematika/vektory-v-prostranstve-i-metod-koordinat/
Если
нам известны координаты точек (естественно,
в заданной системе координат), то
однозначно известно их положение.
Поэтому можно найти любые геометрические
характеристики их взаимного расположения.
Получим формулы, позволяющие по известным
координатам двух точек вычислить
расстояние между ними.
В
простейшем случае, когда две
точки А1 и А2 находятся
на одной оси, расстояние между ними
определяется формулой
s
= |x2 −
x1|,
(3)
где х1, х2 −
координаты точек А1 и А2 соответственно.
Очевидно,
что расстояние от А1 до А2 равно
расстоянию от А2 до А1,
что и привело у к тому, что в формуле (3)
появился знак модуля числа.
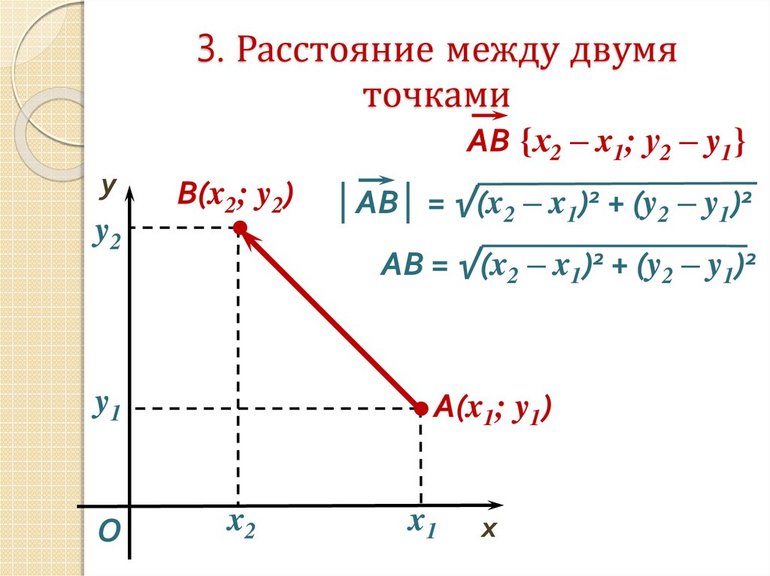
Пусть
на плоскости задана система координат ХОY,
в которой координаты точки А1 равны х1 и у1,
а координаты точки А2,
соответственно, равны х2 и у2 (рис.
8).

рис.
8
В
прямоугольном треугольнике А1А2В длина
стороны А2В равна |х2 −
х1|,
а длина стороны А1В
= |у2 −
у1|,
поэтому расстояние между точками А1 и А2 можно
найти по теореме Пифагора:
s
= √{(x2 −
x1)2 +
(y2 −
y1)2}.
(4)
26. Линейные операции над векторами. Линейные операции над векторами
Сложение
векторов
Пусть
даны два вектора ![]()
и ![]()
.
Приложим вектор
к
точке
(концу
вектора
)
и получим вектор ![]()
(рис.1.7,а;
здесь и далее равные векторы отмечены
одинаковыми засечками).
Вектор ![]()
называется суммой
векторов
и
и
обозначается ![]()
.
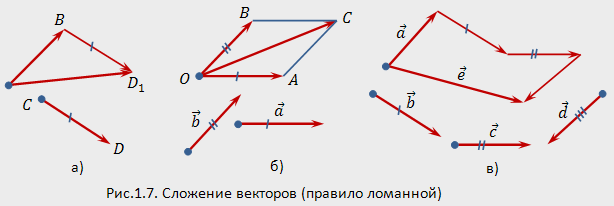
Это нахождение суммы называется правилом
треугольника.
Сумму
двух неколлинеарных векторов ![]()
и ![]()
можно
найти по правилу
параллелограмма.
Для этого откладываем от любой
точки
векторы ![]()
и ![]()
,
а затем строим параллелограмм ![]()
(рис.
1.7,6). Диагональ ![]()
параллелограмма
определяет сумму: ![]()
.
Для
нахождения суммы нескольких векторов
можно построить ломаную из равных им
векторов. Тогда замыкающий
вектор,
соединяющий начало первого вектора
ломаной с концом последнего ее вектора,
равен сумме всех векторов ломаной. На
рис.1.7,в изображена сумма ![]()
четырех
векторов ![]()
.
Таким способом (правило
ломаной)
можно сложить любое конечное число
векторов. Заметим, что сумма векторов
не зависит от точек приложения слагаемых
и от порядка суммирования. Например,
«выстраивая цепочку» векторов для
суммы в виде ![]()
,
получим вектор, равный вектору ![]()
.
Если ломаная получилась замкнутой, то
сумма равна нулевому вектору.

Вычитание
векторов
Вектор ![]()
называется противоположным вектору
,
если их сумма равна нулевому вектору: ![]()
.
Противоположный вектор ![]()
имеет
длину ![]()
,
коллинеарен и противоположно направлен
вектору
(рис.1.8,а,б).
Нулевой вектор является противоположным
самому себе.

Разностью
векторов
и
называется
сумма вектора
с
вектором ![]()
,
противоположным вектору
:
![]()
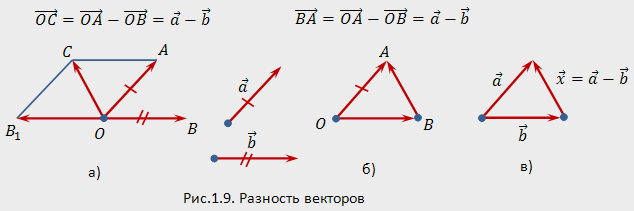
Для
нахождения разности векторов
и
приложим
к произвольной точке
векторы ![]()
,
а также вектор ![]()
,
противоположный вектору
(рис.1.9,а).
Искомую разность находим по правилу
параллелограмма:
Для
нахождения разности проще использовать
правило треугольника (рис. 1.9,6). Для этого
прикладываем к произвольной
точке
векторы
.
Вектор ![]()
при
этом равен искомой разности ![]()
.
Вычитание
векторов — действие, обратное сложению
— можно определить также следующим
образом: разностью
векторов
и
называется
такой вектор ![]()
,
который в сумме с вектором
дает
вектор
(рис.1.9,в),
т.е. разность ![]()
—
это решение уравнения ![]()
.
Пример
1.2. Для
векторов на рис. 1.6 найти следующие суммы
и разности:
Решение. Учитывая
равенство ![]()
,
получаем по правилу треугольника ![]()
.
Поскольку ![]()
и ![]()
,
то ![]()
.
По
правилу параллелограмма ![]()
.
Так
как ![]()
и ![]()
,
находим
Умножение
вектора на число
Произведением
ненулевого вектора а на действительное
число ![]()
называется
вектор ![]()
,
удовлетворяющий условиям:
1)
длина вектора
равна ![]()
,
т.е. ![]()
;
2)
векторы
и
коллинеарные ![]()
;
3)
векторы
и
одинаково
направлены, если ![]()
,
и противоположно направлены, если ![]()
.
Произведение
нулевого вектора на любое число ![]()
считается
(по определению) нулевым вектором: ![]()
;
произведение любого вектора на число
нуль также считается нулевым вектором: ![]()
.
Из определения произведения следует,
что:
а)
при умножении на единицу ![]()
вектор
не изменяется: ![]()
;
б)
при умножении вектора на ![]()
получается
противоположный вектор: ![]()
;
в) деление
вектора на отличное от нуля число ![]()
сводится
к его умножению на число ![]()
,
обратное ![]()
.
г)
при делении ненулевого вектора
на
его длину, т.е. при умножении
на
число ![]()
получаем
единичный вектор, одинаково направленный
с вектором
.
Действительно,
длина вектора ![]()
равна
единице: ![]()
.
Вектор
коллинеарен
и одинаково направлен с вектором
,
так как ![]()
;
д)
при умножении единичного вектора на
число
получаем
коллинеарный ему вектор, длина которого
равна ![]()
.
На
рис.1.10 изображены векторы, получающиеся
в результате умножения данного
вектора
на ![]()
и ![]()
,
а также противоположный вектор ![]()
.

Свойства
линейных операций над векторами
Сложение
векторов и умножение вектора на число
называются линейными
операциями над векторами.
Для
любых векторов ![]()
и
любых действительных чисел ![]()
справедливы
равенства:
Свойства
1, 2 выражают коммутативность и
ассоциативность операции сложения
векторов, свойство 5 — ассоциативность
операции умножения на число, свойства
6,7 — законы дистрибутивности, свойство
8 называется унитарностью.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
План урока:
Прямоугольная система координат
Координаты вектора
Координаты середины отрезка
Вычисление длины векторов и расстояния между точками
Коллинеарность векторов
Определение компланарности векторов
Скалярное произведение векторов
Прямоугольная система координат
В планиметрии мы уже рассматривали прямоугольную систему координат. Ее образовывали 2 перпендикулярные друг другу оси – Ох и Оу. С ее помощью можно было определить положение любой точки на координатной плоскости, просто указав две ее координаты – абсциссу х и ординату у.
В стереометрии необходимо определять положение точки уже не на плоскости, а в пространстве. Для этого добавляется третья ось Оz, которую ещё называют осью апликат. Каждые пара осей образует свою отдельную координатную плоскость, всего получается три таких плос-ти: Оху, Охz и Oуz.

Точка О именуется началом координат. Она делит каждую ось на два луча, один из которых – это положительная полуось, а второй – отрицательная полуось.
Для каждой точки в пространстве можно указать три координаты, однозначно определяющие ее положение в пространстве. Пусть в пространстве есть некоторая точка М. Опустим из нее перпендикуляры на координатные плоскости. В свою очередь из этих проекций точки М опустим перпендикуляры уже на координатные оси. В результате будет построен прямоугольный параллелепипед. Измерения этого параллелепипеда и будут координатами точки М:

Если точка M находится в одной из координатных плоскостей, то одна из ее координат будет нулевой. Например, если М принадлежит плоскости Охz, то нулю будет равна координата у. Если же точка располагается на одной из координатных осей, то у нее уже две координаты будут нулевыми. Так, если точка находится на оси Ох, то только координата х может быть ненулевой, а у и z окажутся нулевыми координатами.
На показанном рисунке ребра параллелепипеда лежат на положительных полуосях, поэтому все координаты положительны. Если же какие-то ребра будут лежать на отрицательных полуосях, то и соответствующие координаты будут отрицательными.
Координаты вектора
Введем в пространстве прямоугольную систему коорд-т, а далее от ее начала отложим вектора i, j и k, которые соответственно будут лежать на координатных осях Ох, Оу и Оz, и длина которых составит единицу. Эти вектора именуют координатными векторами, единичными векторами или просто ортами.

Ясно, что орты находятся в разных плоскостях, то есть они образуют тройку некомпланарных векторов. Это означает, что любой вектор а в пространстве можно разложить на орты:

где х, у и z – какие-то действительные числа. Они как раз и считаются координатами вектора а. Записываются коорд-ты вектора в фигурных скобках. На следующем рисунке показан вектор а{3; – 2; – 4}.

Задание. Разложите на орты вектор

Если начало вектора ОМ располагается в начале системы координат О, то вектор ОМ именуют радиус-вектором. В таком случае коорд-ты точки конца вектора, то есть точки М, совпадают с коорд-тами самого вектора ОМ.

Это свойство радиус-вектора мы уже изучали в 9 классе в планиметрии, и в стереометрии оно сохраняется.
Задание. О – начало координат, а точка М имеет коорд-ты (2; 5; – 3). Найдите коорд-ты вектора ОМ.
Решение. Всё очень просто – коорд-ты вектора будут совпадать с коорд-тами его конца, так его начало совпадает с началом коорд-т:

Также в стереометрии остаются справедливыми ещё несколько правил, которые были доказаны в курсе планиметрии:

Задание. Найдите сначала сумму, а потом разность векторов а{3; 7; 5} и b{2; 4; 6}.
Решение. Будем обозначать коорд-ты векторов через индексы. Например, коорд-ты вектора а – это ха, уа и zа. Пусть сумма векторов будет вектором с, а их разность – вектором d. Для вычисления суммы надо складывать соответствующие координаты:

Для вычисления разности надо из коорд-т вектора а вычитать коорд-ты вектора b:

Задание. Вычислите коорд-ты вектора р, зная, что:

Решение. Для вычисления координат надо в выражении для вектора р сами векторы заменить на их координаты:

Получается, что вектор p имеет координаты {0; – 2; 3}.
Теперь мы можем доказать ещё одно утверждение, уже известное из курса планиметрии:

Действительно, пусть есть некоторый вектор АВ, причем коорд-ты точек А и В известны. Построим радиус-вектора OА и OВ:

Координаты радиус-векторов будут совпадать с координатами их концов:

ч. т. д.
Задание. Определите коорд-ты вектора CD, если даны коорд-ты точек С и D: С(3; 8; – 5) и D(5; 4; 1).
Решение. Здесь надо просто из коорд-т точки D, являющейся концом вектора, вычесть коорд-ты точки С:

Задание. От точки K(10; 6; 13) отложен вектор m{3; 2; 5}, конец совпал в точку H. Найдите коорд-ты точки H.
Решение. Коорд-ты вектора m и его концов связаны формулами:

Координаты середины отрезка
Пусть в пространстве есть отрезок АВ, и координаты его концов известны. Точка М – середина этого отрезка. Как вычислить ее координаты? Рассмотрим взаимосвязь векторов АМ, МВ и АВ:

Раз М – середина АВ, то вектора АМ и МВ имеют равные длины, и при этом они находятся на одной прямой. Значит, эти вектора равны и потому у них одинаковые коорд-ты:

Аналогично можно получить аналогичные формулы для коорд-т у и z:


Рассмотрим несколько задач на координаты точек.
Задание. Найдите коорд-ты середины отрезка, соединяющего точки А(3; 7; 12) и В(1; 5; – 4).
Решение. Просто используем только что выведенные формулы. Середину также обозначаем буквой М:

Задание. Известно, что K середина отрезка CD. Даны координаты точек С и K: С(12; 9; – 3) и K(15; 7; 3). Найдите коорд-ты D.
Решение. Сначала запишем формулу для коорд-ты х:

Вычисление длины векторов и расстояния между точками
Рассмотрим радиус-вектор ОМ с коорд-тами {x; у; z}. Попытаемся найти его длину. Мы можем построить прямоугольный параллелепипед, в котором этот вектор окажется диагональю:

Напомним, что квадрат длины диагонали в прямоугольном параллелепипеде равен сумме квадратов его измерений. Но в полученном параллелепипеде измерения – это коорд-ты х, у и z, поэтому можно записать:

Так как равные вектора имеют как одинаковы и коорд-ты, и длина, то ясно, что каждый вектор с коорд-тами {x; y; z} будет равен рассмотренному радиус-вектору, а значит и его длина будет рассчитываться по такой же формуле.

Задание. Найдите длину вектора m{– 2; 9; 6}.
Решение. Просто используем формулу:

Рассмотрим отрезок АВ с известными коорд-тами его концов. Можно построить вектор АВ, его коорд-ты будут определяться так:


Задание. Найдите расстояние между точкой K(10; 15; 5) и M(16; 21; – 2).
Решение. Просто подставляем коорд-ты точек в формулу:

Задание. Найдите длину медианы KM в ∆ KPN, если известны коорд-ты его вершин: P(2; 5; 8), N (6; 9; 12) и K(16; 11; 13).
Решение. Для нахождения длины медианы достаточно знать коорд-ты ее концов. Коорд-ты K уже известны, а M – середина PN, что позволяет вычислить и ее коорд-ты:

Коллинеарность векторов
Напомним, что если два вектора а и b коллинеарны друг другу, то должно существовать такое число k, что


Полученное отношение (1) является одновременно и признаком коллинеарных векторов, и их свойством. Слово «признак» означает, что любые вектора, чьи координаты соответствуют условию (1), будут коллинеарны. Слово «свойство» означает обратное – если известно, что вектора коллинеарны, то для них обязательно выполняется условие (1). В таких случаях в математике может использоваться словосочетание «тогда и только тогда»:

Очень важно то, что это правило действует только в случае, если все коорд-ты векторов ненулевые. Теперь рассмотрим случай, когда какие-то коорд-ты вектора b (одна или две из них) равны нулю. Например, пусть

В результате мы выяснили, что если коорд-та одного вектора нулевая, то и у любого вектора, коллинеарному ему, эта же коорд-та также должна быть нулевой. Особняком стоит случай с нулевым вектором с коорд-тами {0; 0; 0}. Он условно признается коллинеарным любому вектору.
Задание. Выясните, какие из этих пар векторов коллинеарны:

Решение. В первом задании просто делим друг на друга соответствующие коорд-ты и находим значение коэффициента k:

Значение коэффициента k оказалось одинаковым для каждой пары коорд-т, значит, вектора коллинеарны.
Повторяем эти действия в задании б):

На этот раз коэффициенты k оказались различными, значит, вектора неколлинеарны.
В задании в) у вектора е коорд-та z нулевая. Значит, если и у вектора f, если он коллинеарен z, эта координата должна быть нулевой, но это не так. Значит, вектора e и f неколлинеарны.
В задании г) снова указаны вектора с нулевыми коорд-тами. Но у обоих векторов коорд-та z нулевая, поэтому они могут быть коллинеарными. Однако необходимо проверить, что отношение ненулевых координат одинаково:

Коэффициент k получился одинаковым, поэтому вектора коллинеарны.
В последнем задании д) вектор n – нулевой, ведь все его коорд-ты нулевые. Нулевой вектор всегда коллинеарен другим векторам, в том числе и в этом задании.
Ответ: а) да; б) нет; в) нет; г) да; д) да.
Задание. Выясните, располагаются ли на одной прямой точки А(3; 5; 12), В(5; 7; 16) и С(0; 2; 6).
Решение. Ясно, что если эти точки находятся на одной прямой, то вектора АВ и ВС будут коллинеарными. Если же эти вектора неколлинеарны, то и точки должны находиться на разных прямых.
Сначала вычислим коорд-ты векторов АВ и ВС:

Теперь проверяем, коллинеарны ли эти вектора:

Коэффициенты k одинаковы, а потому АВ и ВС – коллинеарные векторы. Значит, точки А, В и С находятся на одной прямой.
Определение компланарности векторов
Пусть у нас есть три вектора с известными коорд-тами:

Как определить, компланарны ли эти вектора, то есть располагаются ли они в одной плоскости? Если эти вектора компланарны, то, по признаку компаланарности, вектор а можно разложить на вектора b и с:

где х и y – некоторые числа. Но если такое разложение существует, то коорд-ты векторов а, b и с будут связаны равенствами:

Получили систему из 3 уравнений с двумя неизвестными (х и y). Если такая система имеет решение, то вектора компланарны. Если же решения нет, то вектора не компланарны.
Задание. Определите, компланарны ли вектора


Имеем систему с тремя уравнениями. Из последних двух уравнений очевидно, что его решением может быть только пара чисел:

Значит, рассмотренная тройка векторов компланарна.
Задание. Располагаются ли в одной плос-ти вектора:

Решение. Нам надо проверить компаланарность векторов, поэтому действуем также, как и в предыдущей задаче. Если вектора компланарны, то существует разложение:

Получилось неверное равенство. Это означает, что у системы уравнений решения нет, и потому тройка векторов некомпланарна.
Скалярное произведение векторов
В 9 классе мы уже изучали скалярное произведение векторов.

Для нахождения угла между векторами необходимо отложить их от одной точки, тогда они образуют такой угол.
Задание. Угол между векторами с и d составляет 60°, а их длины соответственно равны 5 и 6. Найдите их скалярное произведение.
Решение. Здесь для расчета просто перемножаем длины векторов и косинус 60°:

Напомним несколько уже известных нам фактов о скалярном произведении, остающихся верными и в стереометрии:


Формула для расчета скалярного произведения по коорд-там векторов, используемая в стереометрии, несколько отличается от формулы из курса планиметрии. Напомним, что в планиметрии произведение векторов а{xа; уа} и b{хb; yb} можно было рассчитать так:


Задание. Вычислите скалярное произведение векторов:

На практике скалярное произведение обычно используется для расчета углов между векторами, а также отрезками и прямыми. Рассмотрим несколько задач.
Задание. Вычислите угол между векторами:

Теперь через скалярное произведение возможно рассчитать косинус искомого нами угла, а затем и сам угол, который мы обозначим как α:

Задание. Рассчитайте углы в ∆АВС, зная коорд-ты его вершин: А(1; – 1; 3), В(3; – 1; 1) и С(– 1; 1; 3).
Решение. Чтобы найти ∠В, необходимо просто рассчитать угол между векторами ВС и ВА также, как это сделано в предыдущей задаче. Но сначала найдем коорд-ты векторов ВС и ВА и их длины:

Далее рассчитываем скалярное произведение векторов:

Теперь найдем угол А, который представляет собой угол между векторам AВ и AС. Вектор AВ – это вектор, противоположный ВA, то у него та же длина, но противоположный знак у коорд-т:


Задание. В прямоугольном параллелепипеде АВСDA1B1C1D1 ребра имеют длину:
AB = 1
BC = 2
BB1 = 2
Рассчитайте угол между векторами DB1 и BC1.
Решение. Введем систему коорд-т Охуz и расположим в нем параллелепипед следующим образом:

При этом построении граничные точки векторов будут иметь следующие коорд-ты:

Находим коорд-ты векторов, а также их длины:

Рассчитываем скалярное произведение DB1 и BC1:

Получили ноль. Из этого вытекает, что вектора перпендикулярны, то есть искомый нами угол составляет 90°.
Ответ: 90°
Сегодня мы научились использовать координаты для решения стереометрических задач. Почти все формулы, используемые в методе координаты, аналогичны тем формулам, которые были выведены ещё в курсе планиметрии. Надо лишь учитывать существование ещё одной, третьей координаты z.
Формула расстояния между точками на координатной плоскости является основным инструментом, применяемым при решении ряда задач в двумерном пространстве.
Система координат
Прежде чем говорить о расстоянии между точками по координатам, следует ввести систему отчета, в которой каждый геометрический объект можно будет однозначно определять. Для этой цели часто используют декартову систему координат. Она представляет собой взаимно перпендикулярные прямые, на каждой из которых отмечены единичные отрезки. Именно в них определяется положение тел в пространстве, на плоскости или на прямой линии.
Для названных трех случаев декартова система координат отличается количеством осей:
- 3 для определения положения пространственных объектов;
- 2 для фигур на плоскости;
- 1 для вычисления координат точек.
Единичные отрезки на координатных осях в общем случае могут иметь разную длину.
Однако ввиду симметричности пространства и для удобства выполнения практических расчетов применяют, как правило, единичные отрезки равной длины. Каждому из них соответствует единичный вектор.
Понятие о векторе
Чтобы уметь вычислять расстояние от точки до точки по координатам, удобно пользоваться понятием вектора.
Из школьного курса геометрии известно, что под ним принято понимать отрезок, имеющий некоторое определенное направление. Обозначают его в виде прямой линии конечной длины, на конце которой изображена стрелка.
Пользу использования указанного геометрического объекта трудно переоценить. Например, в физике все величины делятся на 2 большие группы:
- Скаляры.
- Вектора.
К первым относятся масса, электрический заряд, энергия и другие. Вторая группа более обширная. Здесь следует назвать скорость, ускорение, силу тока, напряженности магнитного и электрического полей, силу любой природы и многие другие.
Характеристики объекта
Как любой геометрический объект, вектор обладает набором математических свойств, которые используются при решении задач. Основные из них:

- a- и b- можно складывать и вычитать, при этом получаются новые вектора;
- вектора a- и b- можно умножать друг на друга, существует возможность выполнить скалярное или векторное умножение, каждый вид операции имеет свой геометрический смысл;
- объект однозначно определяется всего двумя точками независимо от мерности пространства;
- он имеет модуль, который геометрически представляет длину его отрезка.
Для всех свойств существуют определяющие их правила. Например, при осуществлении вычитания вектора a- из b- необходимо соединить концы этих объектов отрезком и направить его к концу a-, тогда получается результирующий вектор разницы.
Умножение a- и b- векторным способом является полезной операцией при определении площадей и объемов фигур. Для ее выполнения следует уметь работать с матрицами второго и третьего порядка, в частности, знать, как рассчитывается детерминант (определитель).
Универсальный способ
Речь идет о координатном представлении нульмерных, одномерных, двумерных и трехмерных геометрических фигур. Параметры точек, треугольников, квадратов, прямых, плоскостей и других более сложных объектов могут быть однозначно выражены в виде наборов чисел, привязанных к соответствующей координатной системе. Поскольку существует задача определения расстояния от точки до точки по координатам, имеет смысл рассмотреть только указанный одномерный объект и вектор.
Точка на плоскости
Этот объект является нульмерным. Для его однозначного определения достаточно знать всего один числовой набор, привязанный к координатной системе. На плоскости имеется всего 2 перпендикулярные оси x и y, поэтому всякая точка будет иметь 2 координаты. Например, A (3; 2), B (-1; 4), C (0; -2), D (0; 0). Первое число здесь означает количество единичных отрезков, которые необходимо отсечь на оси x, второе значение — на оси y. Точка D лежит в начале координат, то есть на пересечении x и y.
В общем случае удобно обозначить произвольную точку Q (x0; y0).
Направленный отрезок в двумерном пространстве
На плоскости координаты направленного отрезка так же, как и точки, представляют собой набор двух чисел. Оба обозначают число отрезков единичной длины, которые следует отложить на каждой оси, чтобы получить проекции вектора на x и y. Например, данные a-(1;-2) означают, что для получения a- следует отложить отрезок 1*i- на оси x и -2*j- на y (два единичных j- в отрицательном направлении оси y). На пересечении этих проекций будет находиться конец a-. Начало его лежит в точке (0; 0).
На плоскости и в трехмерном пространстве всего 2 точки однозначно определяют направленный отрезок. Если его начало переместить в пересечение осей x и y, его конец легко можно найти, вычитая соответствующие координаты точек друг из друга. Следующий простой пример демонстрирует сказанное.
Даны точки A (x1; y1), B (x2; y2), тогда AB- будет иметь координаты:
AB- = B — A = (x2-x1; y2-y1).
Вторая точка показывает место расположения конца AB-.
Формула дистанции
Имея полученные представления и знания о свойствах точек и векторов, можно перейти к вопросу нахождения формулы расстояния. Согласно геометрическому определению, под дистанцией между двумя точками понимают длину отрезка, который их соединяет. Эта величина также равна модулю вектора, построенного на нульмерных объектах.
Длину направленного отрезка на плоскости определить просто: необходимо возвести в квадрат каждую его координату, сложить полученные значения, и взять квадратный корень из результирующей суммы. Для вектора a- (x; y) длина будет равна следующей величине:
|a-| = (x 2 + y 2 )^0,5.
Возведение суммы в степень 0,5 эквивалентно взятию из нее квадратного корня.
Поскольку определение координат вектора по соответствующим значениям точек известно, можно получить следующую простую формулу для A (x1; y1) и B (x2; y2):
|AB-| = ((x2-x1)^2 + (y2-y1)^2)^0,5.
В трехмерном пространстве соответствующее выражение будет иметь подобную форму, только добавится третья координата z.
Расстояние между Q и прямой
Полученные знания можно с легкостью применять для решения разнообразных задач по геометрии. Часто приходится находить дистанцию между точкой и прямой. Определить эту величину можно, если знать направляющий вектор прямой. Предположим, что он имеет следующие координаты: a- (x1; y1). Прямая проходит через A (x2; y2). Точка задается так: Q (x0; y0).
В параметрическом виде прямая записывается следующим образом:
(x;y) = (x2;y2) + t*(x1;y1).
Здесь t — параметр, который может принимать любое действительное число. Это выражение позволяет записать равенство (1):
(x-x2)/x1 = (y-y2)/y1 (1).
Пусть точка P (x;y) является проекцией Q (x0;y0) на прямую, тогда расстояние PQ является искомой дистанцией, которую следует найти по условию задачи. Поскольку вектора PQ- и a- перпендикулярны друг другу, их скалярное произведение будет равно нулю (угол между векторами равен 90 градусов, его косинус равен нулю). Исходя из этих рассуждений, можно записать выражение (2):
(x-x0)*x1 + (y-y0)*y1 = 0 (2).
Поскольку имеющиеся равенства (1) и (2) содержат 2 неизвестные переменные, объединение их в систему и решение ее позволит определить точку P (x;y). Зная ее координаты и используя формулу дистанции между двумя точками на плоскости, можно получить искомое расстояние PQ.
Пример задачи
Применить полученные знания поможет простая геометрическая проблема. Имеется прямая, которая задана на плоскости в виде следующего общего выражения:
y = -3*x + 1.
Необходимо найти расстояние от нее до точки Q (2; -2).
Пусть проекцией точки Q на прямую будет нульмерный объект P (x;y). Координаты P должны удовлетворять записанному уравнению.
Чтобы определить направляющий вектор, достаточно взять 2 любые точки на прямой. Подставляя в выражение произвольные значения x, можно определить эти точки A, B и вместе с ними направляющий вектор AB-:
x=0; y=1 ==> A (0;1);
x=1; y=-2 ==> B (1;-2);
AB- = (1;-3).
Вектор QP-, который пересекает прямую под прямым углом, должен подчиняться следующему уравнению (свойство скалярного произведения):
(QP-*AB-) = (x-2)*1 + (y+2)*(-3) = 0.
В это выражение нужно подставить значение y из уравнения прямой.
Получается:
x-2−3*(-3*x + 1)-6=0 ==>
10*x-11=0 ==>
x = 1,1;
y = -3*1,1 + 1 = -2,3.
Таким образом, значение координат проекции Q на прямую равны: P (1,1; -2,3). Остается применить формулу для дистанции между P и Q, чтобы получить ответ на поставленную задачу:
|PQ-| = ((1,1−2)^2+(-2,3+2)^2)^0,5 = 0,95.
Рассчитанное значение округлено до сотых долей и выражается в единицах единичных векторов координатной системы.
При решении подобных задач для сокращения последующих вычислений рекомендуется проверять принадлежность точки прямой, для чего следует подставить координаты в уравнение. Если этот факт подтверждается, искомое расстояние равно нулю.
Углы треугольника
Польза от использования формулы дистанции между точками на плоскости наглядно показывается на примере решения задач на нахождение углов фигур. Пусть нужно определить все углы треугольника, который построен на вершинах A (x1;y1), B (x2;y2), C (x3;y3).
На первый взгляд сложная задача решается легко, если вспомнить о понятии векторного произведения. Например, для векторов AB- и AC- записывается оно так:
|[AB-*AC-]| = |AB-|*|AC-|*sin (A).
Произведение [AB-*AC-] является вектором, который находится как детерминант матрицы третьего порядка. Его модуль, а также длины |AB-| и |AC-| вычисляются по формуле расстояния между двумя точками.
Чтобы определить угол при вершине A треугольника, остается взять функцию арксинуса от отношения векторного произведения к произведению длин сторон AB и AC.