Содержание:
Механические колебания:
Окружающий нас мир наполнен разнообразными колебательными движениями и процессами: колеблются ветки деревьев и кузов троллейбуса или вагон трамвая при движении, колебания струн под руками умелого музыканта вызывают колебания воздуха, и мы слышим прекрасную музыку. Работу большинства электрических бытовых приборов обеспечивает переменный ток, т. е. колебательное движение электронов в проводниках, а видео и звуковую информацию мы получаем с помощью электромагнитных волн, которые представляют собой распространяющиеся в пространстве колебания электромагнитного поля.
Кроме того, многие важнейшие процессы внутри организма человека являются колебательными: сердце человека в спокойном состоянии совершает около одного колебательного движения в секунду, процесс дыхания обеспечивается колебательными движениями легких, под действием повторяющихся нервных импульсов каждая мышца в теле человека непрерывно то сокращается, то растягивается.
Колебательные процессы изучаются и используются во многих сферах деятельности человека: в радиотехнике и связи, строительстве, автомобиле- и самолетостроении, медицине, биологии, химии и т. п.
Механические колебания и волны
При движении материальной точки 
Тело находится в равновесии, если векторная сумма всех сил, приложенных к нему, и алгебраическая сумма моментов этих сил относительно любой оси равна нулю.
Движение, при котором все характеризующие его физические величины (например, координата  , проекция скорости
, проекция скорости  , проекция действующей силы
, проекция действующей силы  ) принимают одинаковые значения через равные промежутки времени
) принимают одинаковые значения через равные промежутки времени  (рис. 1), называется периодическим.
(рис. 1), называется периодическим.
Периодическое движение является колебательным, если тело или материальная точка движется вблизи положения равновесия, отклоняясь от него то в одну, то в другую сторону. Например, механическим колебательным движением является движение тела, подвешенного на нити (рис. 2, а), а также движение груза на пружине (рис. 2, б) и металлической пластинки, один конец которой закреплен (рис. 2, в).
При этом через любую точку траектории (кроме крайних) тело проходит как в прямом, так и в обратном направлении.
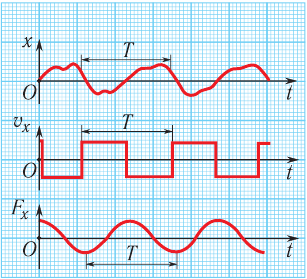
Рис. 1. Графики периодических зависимостей , , от времени.
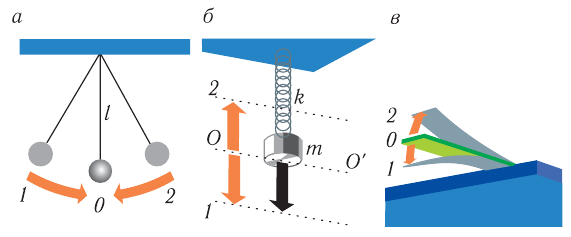
Рис. 2. Колебательные движения: а — тела, подвешенного на нити; б — груза на пружине; в — металлической пластинки, закрепленной на конце
Таким образом, колебательным называется периодическое движение (процесс), при котором любая характеризующая его физическая величина (например, координата) поочередно принимает то положительное, то отрицательное значение относительно положения устойчивого равновесия. Следовательно, периодическое колебательное движение (колебания) обладает свойством повторяемости во времени.
Подчеркнем, что по своей природе колебания могут быть не только механическими, но и электромагнитными (соответствуют изменениям напряжения и силы тока в электрической цепи), термодинамическими (соответствуют периодическим изменениям температуры системы с течением времени) и т. д.
Колебания — особая форма движения в том смысле, что различные по своей природе физические процессы (механические, электромагнитные и т. д.) описываются одинаковыми математическими зависимостями физических величин от времени.
Результаты экспериментов показывают, что для возникновения и существования механических колебаний необходимо выполнение определенных условий. Прежде всего, при выведении (например, при малом смещении) тела из положения равновесия в системе должна возникать результирующая сила, стремящаяся возвратить тело в положение равновесия. Кроме того, в системе не должно быть большое трение, поскольку в этом случае колебания быстро затухнут (вследствие потери энергии) или не возникнут вообще.
Рассмотрим равномерное вращение материальной точки  по окружности радиусом
по окружности радиусом  (рис. 3, а). Пусть рассматриваемое движение происходит против хода часовой стрелки. Выберем ось
(рис. 3, а). Пусть рассматриваемое движение происходит против хода часовой стрелки. Выберем ось  , как показано на рисунке 3, а. Если в начальный момент времени
, как показано на рисунке 3, а. Если в начальный момент времени  материальная точка находилась в положении
материальная точка находилась в положении  , то через промежуток времени
, то через промежуток времени  она окажется в некотором положении
она окажется в некотором положении  .
.
Спроецируем на ось радиус-вектор  движущейся точки, ее линейную скорость
движущейся точки, ее линейную скорость  и центростремительное ускорение
и центростремительное ускорение  . Проекция
. Проекция  радиус-вектора в положении (точка
радиус-вектора в положении (точка  ) является смещением материальной точки от центра окружности
) является смещением материальной точки от центра окружности  вдоль оси (см. рис. 3, а). Следовательно, на оси этому смещению точки соответствует координата точки
вдоль оси (см. рис. 3, а). Следовательно, на оси этому смещению точки соответствует координата точки  .
.
Поскольку при равномерном вращении точки по окружности ее координата (смещение) будет периодически изменяться от  до
до  , то можно сказать, что точка совершает колебательное движение вдоль оси , а ее координата является координатой колеблющейся точки (рис. 3, б).
, то можно сказать, что точка совершает колебательное движение вдоль оси , а ее координата является координатой колеблющейся точки (рис. 3, б).
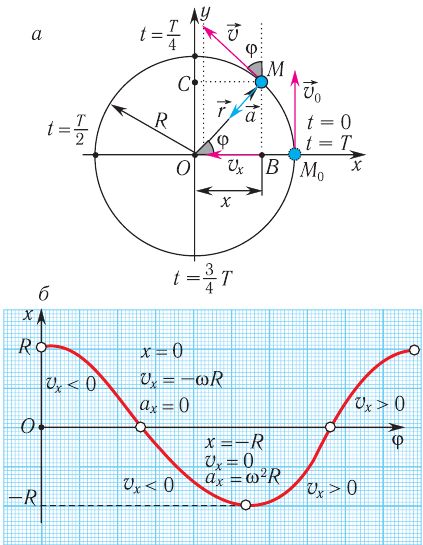
Рис. 3. Движение материальной точки по окружности: а — характеристики движения; б — колебательная зависимость координаты  , соответствующая движению по окружности.
, соответствующая движению по окружности.
Соответственно, проекция линейной скорости материальной точки на ось является проекцией скорости  точки В и периодически изменяется
точки В и периодически изменяется  до
до  , а проекция ее центростремительного ускорения — проекцией ускорения
, а проекция ее центростремительного ускорения — проекцией ускорения  точки , которое также периодически изменяется от
точки , которое также периодически изменяется от  до
до  .
.
Радиус-вектор  за промежуток времени
за промежуток времени  повернулся на угол
повернулся на угол  (см. рис. 3, а). При равномерном вращении точки по окружности ее линейная скорость
(см. рис. 3, а). При равномерном вращении точки по окружности ее линейная скорость  направлена по касательной, а центростремительное ускорение
направлена по касательной, а центростремительное ускорение  — к центру окружности (см. рис. 3, а). Таким образом,
— к центру окружности (см. рис. 3, а). Таким образом,

С учетом того, что модуль линейной скорости  , модуль центростремительного ускорения
, модуль центростремительного ускорения  и
и  , выполняются соотношения:
, выполняются соотношения:

где  — период вращения тела по окружности.
— период вращения тела по окружности.
Если при  материальная точка находилась в точке
материальная точка находилась в точке  , то координату
, то координату  , проекции скорости
, проекции скорости  и ускорения
и ускорения  точки в любой момент времени можно определить по формулам:
точки в любой момент времени можно определить по формулам:
Таблица 1. Координата  , проекции скорости
, проекции скорости  и ускорения
и ускорения  тела, движущегося движущегося по окружности, в разные моменты времени
тела, движущегося движущегося по окружности, в разные моменты времени
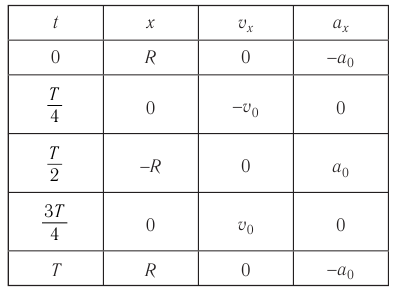
Поскольку функции  и
и  периодические, то через промежуток времени, равный периоду
периодические, то через промежуток времени, равный периоду  , по истечении которого угол
, по истечении которого угол  изменится на
изменится на  , все характеристики движения точки
, все характеристики движения точки  вдоль оси
вдоль оси  (координата, проекция скорости и проекция ускорения) примут прежние значения (табл. 1), т. е. значения характеристик периодически повторяются.
(координата, проекция скорости и проекция ускорения) примут прежние значения (табл. 1), т. е. значения характеристик периодически повторяются.
Точка в течение этого промежутка времени дважды проходит через начало координат, двигаясь в противоположных направлениях вдоль оси  (см. рис. 3, а). Как отмечалось выше, повторяемость — основной признак периодического движения.
(см. рис. 3, а). Как отмечалось выше, повторяемость — основной признак периодического движения.
Графики зависимостей координаты , проекции скорости и проекции ускорения  от времени показаны на рисунке 4, где
от времени показаны на рисунке 4, где  — время, отсчитываемое от момента начала колебаний.
— время, отсчитываемое от момента начала колебаний.
Обратим внимание на то, что проекция ускорения  точки (см. рис. 3, а) в любой момент времени пропорциональна смещению (координате)
точки (см. рис. 3, а) в любой момент времени пропорциональна смещению (координате)  и противоположна ему по знаку:
и противоположна ему по знаку:
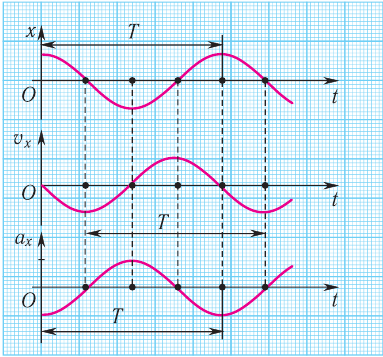
Рис. 4. Зависимости  от времени при колебательном движении материальной точки
от времени при колебательном движении материальной точки
Перепишем данное соотношение в виде

Колебания, описываемые уравнением (1), являются гармоническими, а система, совершающая такие колебания, — гармонической колебательной системой, или гармоническим осциллятором (от лат. oscillo — качаюсь).
Уравнение (1) описывает гармонические колебания, при которых координата (смещение) тела от времени изменяется по закону косинуса:

или синуса:

где  — начальная фаза, которая определяет состояние колебательной системы в начальный момент времени,
— начальная фаза, которая определяет состояние колебательной системы в начальный момент времени,  — амплитуда колебаний.
— амплитуда колебаний.
Зависимость координаты от времени  (соотношения (2) и (3)) называется кинематическим законом (или уравнением) гармонических колебаний (законом движения), поскольку позволяет определить положение тела, его скорость, ускорение в произвольный момент времени.
(соотношения (2) и (3)) называется кинематическим законом (или уравнением) гармонических колебаний (законом движения), поскольку позволяет определить положение тела, его скорость, ускорение в произвольный момент времени.
Наиболее важными величинами, характеризующими механические периодические колебания, являются:
 — координата
— координата  (смещение из положения равновесия) в момент времени
(смещение из положения равновесия) в момент времени  :
:

где  — заданная периодическая функция времени ,
— заданная периодическая функция времени , — период этой функции.
— период этой функции.
 — амплитуда колебаний — максимальное смещение
— амплитуда колебаний — максимальное смещение  тела или системы тел из положения устойчивого равновесия.
тела или системы тел из положения устойчивого равновесия.
 — период — длительность одного полного колебания, т. е. наименьший промежуток времени, по истечении которого повторяются значения всех физических величин, характеризующих колебание. Здесь — время совершения
— период — длительность одного полного колебания, т. е. наименьший промежуток времени, по истечении которого повторяются значения всех физических величин, характеризующих колебание. Здесь — время совершения  полных колебаний.
полных колебаний.
В СИ единицей периода колебаний является 1 секунда (1 с).
 — частота — число полных колебаний, совершаемых в единицу времени:
— частота — число полных колебаний, совершаемых в единицу времени:
В СИ единицей частоты колебаний является 1 герц (1 Гц). 1 Гц равен частоте колебаний тела, при которой за 1 с тело совершает одно полное колебание  .
.
 — циклическая частота — число полных колебаний, совершаемых за промежуток времени
— циклическая частота — число полных колебаний, совершаемых за промежуток времени  , равный
, равный  секунд:
секунд:
В СИ единицей циклической частоты является 1 радиан в секунду  .
.
 — фаза (от греч.
— фаза (от греч.  (фазис) — появление, момент явления) — аргумент периодической функции, определяющий значение физической величины в любой момент времени
(фазис) — появление, момент явления) — аргумент периодической функции, определяющий значение физической величины в любой момент времени  . Она определяет состояние колебательной системы (координаты, скорости, ускорения) в любой момент времени при заданной частоте и амплитуде.
. Она определяет состояние колебательной системы (координаты, скорости, ускорения) в любой момент времени при заданной частоте и амплитуде.
Единицей фазы является 1 радиан (1 рад).
 — начальная фаза, которая определяет состояние колебательной системы в начальный момент времени
— начальная фаза, которая определяет состояние колебательной системы в начальный момент времени  .
.
Циклическая частота  гармонических колебаний зависит только от свойств системы, в которой происходят колебания, но не зависит от амплитуды колебаний. Амплитуда колебаний
гармонических колебаний зависит только от свойств системы, в которой происходят колебания, но не зависит от амплитуды колебаний. Амплитуда колебаний  и начальная фаза определяются не свойствами самой системы, а тем способом, которым в системе вызваны колебания.
и начальная фаза определяются не свойствами самой системы, а тем способом, которым в системе вызваны колебания.
Так как ускорение тела всегда обусловлено действием силы, то по второму закону Ньютона в проекции на ось  можно записать:
можно записать:
Следовательно, при гармонических колебаниях проекция силы  , возвращающей тело в положение равновесия
, возвращающей тело в положение равновесия  , пропорциональна его смещению от этого положения (координате)
, пропорциональна его смещению от этого положения (координате)  , причем знак «минус» отражает «возвратный» характер возникающей силы. Как уже отмечалось, появление возвращающей силы при отклонении тела от положения равновесия является необходимым условием возникновения колебаний.
, причем знак «минус» отражает «возвратный» характер возникающей силы. Как уже отмечалось, появление возвращающей силы при отклонении тела от положения равновесия является необходимым условием возникновения колебаний.
Положению равновесия тела соответствует точка, в которой равнодействующая сил, приложенных к нему, равна нулю  . Координату этой точки, как правило, принимают равной нулю
. Координату этой точки, как правило, принимают равной нулю  .
.
Различают несколько видов равновесия (рис. 5). Равновесие называется устойчивым, если при малом отклонении тела от положения равновесия возникают силы, возвращающие его в исходное положение. Равновесие называется неустойчивым, если при малом отклонении тела от положения равновесия возникают силы, вызывающие дальнейшее отклонение тела от положения равновесия. Равновесие называется безразличным, если при отклонении тела от положения равновесия равнодействующая сила остается равной нулю. Примером устойчивого равновесия может служить равновесие небольшого шарика в сферической ямке, а неустойчивого — равновесие шарика на вершине сферической горки. Равновесие шарика на горизонтальной поверхности является безразличным.
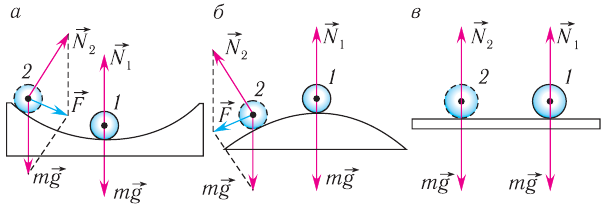
Рис. 5. Положения устойчивого (а), неустойчивого (б) и безразличного (в) равновесия
Таким образом, колебания материальной точки могут возникать только вблизи положения устойчивого равновесия. Если при этом они происходят под действием возвращающей силы, модуль которой прямо пропорционален смещению точки из положения равновесия, направленной к положению равновесия колеблющегося тела, то они будут гармоническими.
Заметим, что точно так же, как мы рассматривали изменение координаты  вращающейся по окружности материальной точки
вращающейся по окружности материальной точки  , можно рассматривать и изменение ее координаты
, можно рассматривать и изменение ее координаты  (точка
(точка  ) (см. рис. 3, а). Следовательно, точка
) (см. рис. 3, а). Следовательно, точка  будет совершать гармонические колебания вдоль оси
будет совершать гармонические колебания вдоль оси  .
.
Значит, равномерное вращение материальной точки по окружности можно рассматривать как наложение двух одинаковых по амплитуде гармонических колебаний, которые происходят одновременно в двух взаимно перпендикулярных направлениях.
Пример №1
За какую часть периода тело, совершающее гармонические колебания, проходит расстояние: а) от положения равновесия до максимального смещения; б) первую половину этого расстояния; в) вторую половину этого расстояния?
Решение
Координата тела, совершающего гармонические колебания, определяется соотношением:
Здесь  — амплитуда колебаний тела,
— амплитуда колебаний тела,  — время, отсчитываемое с момента прохождения телом положения равновесия,
— время, отсчитываемое с момента прохождения телом положения равновесия,  — период колебаний,
— период колебаний,  — начальная фаза.
— начальная фаза.
Пусть тело находится в положении равновесия в начальный момент времени  , тогда
, тогда  и
и  .
.
а) Промежуток времени  , необходимый телу для прохождения расстояния из среднего положения в крайнее
, необходимый телу для прохождения расстояния из среднего положения в крайнее  , определяется из уравнения:
, определяется из уравнения:
Наименьшее значение , при котором выполняется это равенство, получается при
Отсюда искомый промежуток времени:

б) Промежуток времени  , необходимый для прохождения первой половины этого расстояния
, необходимый для прохождения первой половины этого расстояния  определяется из уравнения:
определяется из уравнения:

Отсюда

в) Промежуток времени  , необходимый для прохождения второй половины этого расстояния, определяется из соотношения:
, необходимый для прохождения второй половины этого расстояния, определяется из соотношения:
Ответ: 
Таким образом, для прохождения первой половины расстояния тело затрачивает в 2 раза меньше времени, чем для прохождения второй половины.
Пружинный и математический маятники
Второй закон Ньютона (основной закон динамики): ускорение тела прямо пропорционально результирующей силе и обратно пропорционально массе тела:
Закон Гука: при упругих деформациях сжатия и растяжения модуль силы упругости прямо пропорционален модулю изменения длины тела:

где k — жесткость тела,  — длина недеформированного тела,
— длина недеформированного тела,  — длина деформированного тела.
— длина деформированного тела.
Колебательная система, состоящая из тела с прикрепленной к нему пружиной, называется пружинным маятником. Пружина может располагаться как вертикально (вертикальный пружинный маятник), так и горизонтально (горизонтальный пружинный маятник).
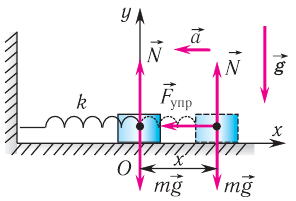
Рис. 6. Горизонтальный пружинный маятник
Рассмотрим колебания горизонтального пружинного маятника. Пусть груз массой  , лежащий на гладкой горизонтальной поверхности, прикреплен к свободному концу легкой (невесомой) пружины жесткостью
, лежащий на гладкой горизонтальной поверхности, прикреплен к свободному концу легкой (невесомой) пружины жесткостью  (рис. 6). Второй конец пружины неподвижен относительно данной инерциальной системы отсчета (ИСО).
(рис. 6). Второй конец пружины неподвижен относительно данной инерциальной системы отсчета (ИСО).
Выведем груз из положения равновесия, сместив его на расстояние  вправо (см. рис. 6). Тогда в пружине возникнет сила упругости
вправо (см. рис. 6). Тогда в пружине возникнет сила упругости  , действующая на груз и направленная влево.
, действующая на груз и направленная влево.
Согласно второму закону Ньютона для движения груза
В проекции на ось  действующих на груз сил (см. рис. 6) с учетом закона Гука получаем:
действующих на груз сил (см. рис. 6) с учетом закона Гука получаем:
или
Перепишем полученное соотношение в виде:

которое является уравнением гармонических колебаний пружинного маятника.
Сравнивая (1) с уравнением гармонических колебаний  , находим циклическую частоту колебаний горизонтального пружинного маятника:
, находим циклическую частоту колебаний горизонтального пружинного маятника:

которая определяется массой  груза и жесткостью
груза и жесткостью  пружины.
пружины.
Для нахождения периода колебаний пружинного маятника воспользуемся формулой  , подставив в нее выражение (2):
, подставив в нее выражение (2):

Как следует из формул (2) и (3), период и частота колебаний пружинного маятника не зависят от амплитуды его колебаний (в пределах выполнимости закона Гука).
Свойство независимости периода колебаний маятника от амплитуды называется изохронностью (от греч.  (изос) — равный и
(изос) — равный и  (хронос) — время). Следовательно, колебания пружинного маятника обладают свойством изохронности.
(хронос) — время). Следовательно, колебания пружинного маятника обладают свойством изохронности.
Изохронность колебаний маятника была открыта Галилео Галилеем в 1583 г. при изучении движения груза, подвешенного на нити. Моделью данной колебательной системы является математический маятник.
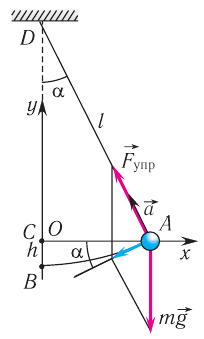
Рис. 7. Колебания математического маятника
Колебательная система, состоящая из находящегося в поле силы тяжести тела, подвешенного на легкой нерастяжимой нити, размеры которого малы по сравнению с длиной нити, а его масса значительно больше массы нити, называется математическим маятником. При таких условиях тело можно считать материальной точкой, а нить — легкой нерастяжимой (рис. 7).
Рассмотрим колебания математического маятника.
Отклонение маятника от положения равновесия будем характеризовать углом  (см. рис. 7), который нить образует с вертикалью.
(см. рис. 7), который нить образует с вертикалью.
После отклонения маятника на него действуют две силы: направленная вертикально вниз сила тяжести  и направленная вдоль нити сила упругости
и направленная вдоль нити сила упругости  . Под действием этих сил тело движется по дуге окружности к устойчивому положению равновесия.
. Под действием этих сил тело движется по дуге окружности к устойчивому положению равновесия.
Согласно второму закону Ньютона для движения маятника можем записать:

В проекциях на выбранные оси координат  и
и  (см. рис. 7) получаем:
(см. рис. 7) получаем:

Для углов отклонения  значения
значения  и
и  различаются меньше чем на
различаются меньше чем на  . Поэтому при малых углах отклонения
. Поэтому при малых углах отклонения  и длина дуги
и длина дуги  очень мало отличается от длины хорды
очень мало отличается от длины хорды  , где угол выражен в радианах. Тогда смещение маятника вдоль дуги
, где угол выражен в радианах. Тогда смещение маятника вдоль дуги  . Но практически маятник движется вдоль оси . Из
. Но практически маятник движется вдоль оси . Из  находим
находим  и, подставив это выражение в (5), получим:
и, подставив это выражение в (5), получим:

Таким образом, силой, возвращающей маятник к устойчивому положению равновесия, является сила упругости его нити.
При малых углах отклонения маятника проекция вектора ускорения  и ею можно пренебречь, а
и ею можно пренебречь, а  , тогда из уравнения (6) следует, что
, тогда из уравнения (6) следует, что  .
.
Следовательно, уравнение движения маятника вдоль оси запишется в виде:
где  — ускорение, сообщаемое грузу маятника силой упругости нити.
— ускорение, сообщаемое грузу маятника силой упругости нити.
Отсюда получаем уравнение гармонических колебаний математического маятника:

При сравнении уравнения (8) с уравнением гармонических колебаний  можно сделать вывод, что при малых отклонениях математический маятник совершает гармонические колебания с циклической частотой
можно сделать вывод, что при малых отклонениях математический маятник совершает гармонические колебания с циклической частотой

Тогда период малых колебаний математического маятника в поле тяжести Земли определяется по формуле Гюйгенса:

которую впервые получил ученик И. Ньютона Христиан Гюйгенс.
При углах отклонения математического маятника  погрешность расчета периода колебаний математического маятника по формуле Гюйгенса не превышает
погрешность расчета периода колебаний математического маятника по формуле Гюйгенса не превышает  .
.
Как видно из формул (9) и (10), циклическая частота и период математического маятника не зависят от массы маятника и амплитуды его колебаний, а определяются только его длиной  и модулем ускорения свободного падения
и модулем ускорения свободного падения  .
.
Галилео Галилей первый экспериментально определил, что период малых колебаний  математического маятника длиной в поле силы тяжести не зависит от его массы
математического маятника длиной в поле силы тяжести не зависит от его массы  и амплитуды колебаний (угла начального отклонения
и амплитуды колебаний (угла начального отклонения  ). Он установил также, что период этих колебаний прямо пропорционален
). Он установил также, что период этих колебаний прямо пропорционален  .
.
Если маятник приобретает дополнительное ускорение  , обусловленное, например, ускоренным движением точки подвеса, то при этом будет изменяться сила упругости нити. В таком случае период колебаний маятника будет определяться по формуле:
, обусловленное, например, ускоренным движением точки подвеса, то при этом будет изменяться сила упругости нити. В таком случае период колебаний маятника будет определяться по формуле:
где  — «эффективное ускорение», равное векторной разности
— «эффективное ускорение», равное векторной разности  .
.
Пример №2
Выведите формулу для периода колебаний вертикального пружинного маятника, если масса груза  и жесткость пружины
и жесткость пружины  .
.
Решение
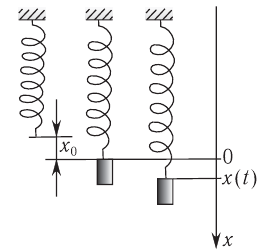
Рис.8
Рассмотрим вертикальное движение груза, происходящее под действием силы упругости пружины и силы тяжести груза после толчка. Начало координат поместим в точку, соответствующую равновесному положению тела (рис. 8). В этом положении пружина растянута на величину  , определяемую соотношением:
, определяемую соотношением:

При смещении груза на величину  из положения равновесия сила, действующая со стороны пружины на груз, равна
из положения равновесия сила, действующая со стороны пружины на груз, равна  .
.
Тогда по второму закону Ньютона

С учетом соотношения (1) это уравнение перепишем в виде:
Если ввести обозначение  , то уравнение движения груза запишется в виде:
, то уравнение движения груза запишется в виде: 
Оно описывает гармонические колебания вертикального пружинного маятника с частотой такой же, как у горизонтального пружинного маятника. Следовательно, период колебаний вертикального пружинного маятника такой же, как и горизонтального:
Ответ: 
Таким образом, действующая в колебательной системе постоянная сила только смещает положения равновесия, но не изменяет частоту колебаний.
Пример №3
Определите амплитуду  , циклическую частоту
, циклическую частоту  , период
, период  и начальную фазу
и начальную фазу  колебаний тела массой
колебаний тела массой  , подвешенного к вертикальной пружине (рис. 9). Известно, что в состоянии покоя тело растягивает пружину на расстояние
, подвешенного к вертикальной пружине (рис. 9). Известно, что в состоянии покоя тело растягивает пружину на расстояние  и для возбуждения колебаний его смещают вниз на расстояние
и для возбуждения колебаний его смещают вниз на расстояние  от положения равновесия и отпускают.
от положения равновесия и отпускают.
Решение
Циклическая частота колебаний вертикального пружинного маятника так же, как и горизонтального, определяется по формуле (см. пример 1):
Для нахождения жесткости  пружины запишем условие равновесия тела:
пружины запишем условие равновесия тела:
По закону Гука
В проекции на ось  условие равновесия запишется:
условие равновесия запишется:
Отсюда для циклической частоты  получаем:
получаем:

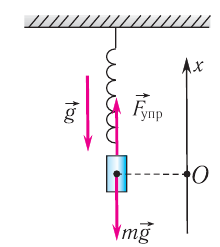
Рис. 9
Амплитуда колебаний маятника определяется начальным смещением:

Период колебаний находим из соотношения:
Поскольку в начальный момент времени тело было смещено на максимальную величину, то начальная фаза колебаний  .
.
Ответ: 
Превращения энергии при гармонических колебаниях
Механическая энергия системы равна сумме ее кинетической и потенциальной энергии. Механическая энергия замкнутой системы, в которой не действуют силы трения (сопротивления), сохраняется.
Поскольку при колебаниях гармонического осциллятора силой трения пренебрегают, то его механическая энергия сохраняется. Рассмотрим превращения энергии при колебаниях математического маятника. Выберем систему отсчета таким образом, чтобы в положении равновесия его потенциальная энергия была равна нулю.
При отклонении маятника на угол  (рис. 10), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:
(рис. 10), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:

Поскольку при прохождении положения равновесия потенциальная энергия равна нулю  , то из закона сохранения механической энергии следует (см. рис. 10), что
, то из закона сохранения механической энергии следует (см. рис. 10), что  , т. е. кинетическая энергия маятника (а следовательно, и скорость) будет максимальна:
, т. е. кинетическая энергия маятника (а следовательно, и скорость) будет максимальна:
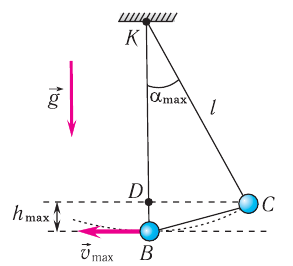
Рис 10. Определение  и
и  .
.
Запишем закон сохранения механической энергии, подставив в него выражения для потенциальной и кинетической энергии:

Отсюда найдем модуль максимальной скорости маятника:

Высоту  можно выразить через длину
можно выразить через длину  маятника и амплитуду
маятника и амплитуду  колебаний. Если колебания малые, то
колебаний. Если колебания малые, то  . Из
. Из  (см. рис. 10) находим:
(см. рис. 10) находим:

или

Подставив выражение (3) для в формулу (2), получим:

Подставляя выражения (3) для и (4) для  в соотношение (1), находим:
в соотношение (1), находим:

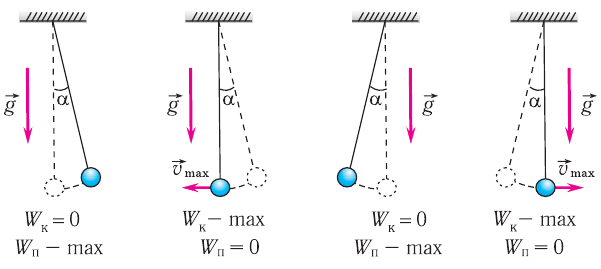
Рис. 11. Превращения энергии при колебаниях математического маятника
Таким образом, в положении равновесия потенциальная энергия полностью переходит в кинетическую, а в положениях максимального отклонения кинетическая энергия полностью переходит в потенциальную (рис. 11).
В любом промежуточном положении 
Покажем, что аналогичные превращения энергии имеют место и для пружинного маятника (рис. 12).
В крайних положениях, когда  , модуль скорости маятника
, модуль скорости маятника  , и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
, и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:

Таким образом, из соотношения (6) следует, что механическая энергия пружинного маятника пропорциональна квадрату амплитуды колебаний.
В положении равновесия, когда  , вся энергия пружинного маятника переходит в кинетическую энергию груза:
, вся энергия пружинного маятника переходит в кинетическую энергию груза:
где  — модуль максимальной скорости груза при колебаниях.
— модуль максимальной скорости груза при колебаниях.
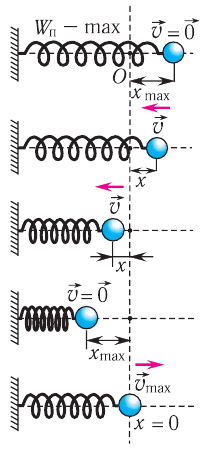
Рис. 12. Превращения энергии при колебаниях пружинного маятника
В положениях между крайними точками полная энергия

С учетом выражений для координаты  и проекции скорости груза
и проекции скорости груза  , а также для
, а также для  находим его потенциальную энергию
находим его потенциальную энергию  и кинетическую энергию
и кинетическую энергию  в произвольный момент времени
в произвольный момент времени  .
.
Тогда полная механическая энергия пружинного маятника в этот же момент времени есть величина постоянная и равная:
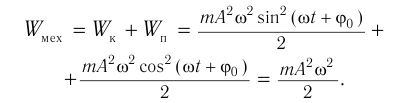
Таким образом, начальное смещение  определяет начальную потенциальную, а начальная скорость
определяет начальную потенциальную, а начальная скорость  определяет начальную кинетическую энергию колеблющегося тела. При отсутствии в системе потерь энергии процесс колебаний сопровождается только переходом энергии из потенциальной в кинетическую и обратно.
определяет начальную кинетическую энергию колеблющегося тела. При отсутствии в системе потерь энергии процесс колебаний сопровождается только переходом энергии из потенциальной в кинетическую и обратно.
Заметим, что частота периодических изменений кинетической (потенциальной) энергии колеблющегося тела в два раза больше частоты колебаний маятника. Действительно, дважды за период механическая энергия тела будет полностью превращаться в потенциальную (в двух крайних положениях маятника) и дважды за период — в кинетическую (при его прохождении через положение равновесия) (рис. 13).
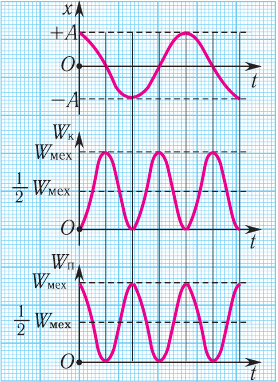
Рис. 13. Зависимости смещения маятника, его кинетической и потенциальной энергии от времени
Пример №4
Математический маятник при колебаниях от одного крайнего положения до другого смещается на расстояние  и при прохождении положения равновесия достигает скорости, модуль которой
и при прохождении положения равновесия достигает скорости, модуль которой  . Определите период
. Определите период  колебаний маятника.
колебаний маятника.
Решение
По закону сохранения механической энергии

Отсюда

Ответ: 
Пример №5
Груз массой  находится на гладкой горизонтальной поверхности и закреплен на легкой пружине жесткостью
находится на гладкой горизонтальной поверхности и закреплен на легкой пружине жесткостью  . Его смещают на расстояние
. Его смещают на расстояние  от положения равновесия и сообщают в направлении от положения равновесия скорость, модуль которой
от положения равновесия и сообщают в направлении от положения равновесия скорость, модуль которой  . Определите потенциальную
. Определите потенциальную  и кинетическую
и кинетическую  энергию груза в начальный момент времени. Запишите кинематический закон движения груза.
энергию груза в начальный момент времени. Запишите кинематический закон движения груза.
Решение
Потенциальная энергия груза:
Кинетическая энергия груза:

Начальное смещение груза не является амплитудой, так как вместе с начальным отклонением грузу сообщили и скорость. Однако полная энергия может быть выражена через амплитуду колебаний:

Отсюда

Циклическая частота:
В начальный момент времени  координата груза
координата груза  . Отсюда начальная фаза:
. Отсюда начальная фаза:

Тогда закон гармонических колебаний имеет вид (рис. 14):

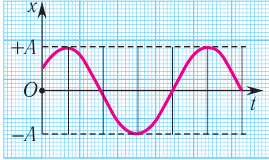
Рис. 14. Зависимость смещения маятника от времени
Ответ: 
Свободные и вынужденные колебания. Резонанс
Силы взаимодействия тел системы называют внутренними. Тела, не входящие в систему, называют внешними телами. Силы, которые действуют на тела системы со стороны внешних тел, называют внешними силами.
Как вам уже известно, механическая энергия гармонического осциллятора (например, груза на пружине) пропорциональна квадрату амплитуды его колебаний. Колебания, происходящие с постоянной во времени амплитудой, называются незатухающими колебаниями.
Колебания, которые совершает система около положения устойчивого равновесия под действием внутренних сил после того, как она была выведена из состояния равновесия и предоставлена самой себе, называются свободными (собственными) колебаниями.
Свободные колебания происходят со строго определенной частотой  , называемой частотой свободных (собственных) колебаний системы. Эта частота зависит только от параметров системы. Примерами таких колебаний могут служить колебания математического и пружинного маятников, происходящие в отсутствие сил трения. Амплитуда свободных колебаний определяется начальными условиями, т. е. тем начальным отклонением или толчком, которым маятник или груз на пружине приведен в движение. Свободные колебания являются самым простым видом колебаний.
, называемой частотой свободных (собственных) колебаний системы. Эта частота зависит только от параметров системы. Примерами таких колебаний могут служить колебания математического и пружинного маятников, происходящие в отсутствие сил трения. Амплитуда свободных колебаний определяется начальными условиями, т. е. тем начальным отклонением или толчком, которым маятник или груз на пружине приведен в движение. Свободные колебания являются самым простым видом колебаний.
В любой реальной колебательной системе всегда присутствуют силы трения (сопротивления), поэтому механическая энергия системы с течением времени уменьшается, переходя во внутреннюю энергию. Вместе с тем убыль механической энергии означает и уменьшение амплитуды колебаний.
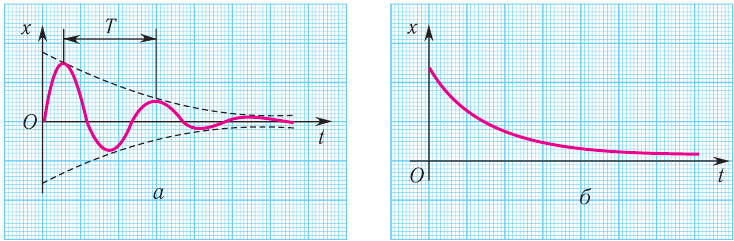
Рис. 15. Затухающие механические колебания: а — малая сила трения; б — большая сила трения
Колебания, амплитуда которых уменьшается с течением времени вследствие потери энергии колебательной системой, называются затухающими колебаниями (рис. 15). Уменьшение механической энергии системы (превращение ее во внутреннюю энергию) происходит вследствие трения и сопротивления окружающей среды.
Систему называют диссипативной (от лат. dissipation — рассеяние), если ее механическая энергия с течением времени уменьшается за счет превращения ее во внутреннюю энергию.
При малых потерях энергии колебания можно считать периодическими и пользоваться такими понятиями, как период и частота колебаний. Так, например, период — промежуток времени между двумя последовательными максимумами колеблющейся физической величины (см. рис. 15, а).
Колебания в любой реальной системе рано или поздно затухают. Чтобы колебания не затухали, необходимо воздействие внешней силы. Однако не всякая внешняя сила заставляет систему двигаться периодически. Например, невозможно раскачать качели, если действовать на них постоянной силой. Внешняя сила тоже должна быть периодической.
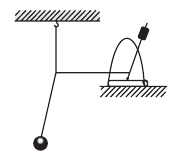
Рис. 16. Наблюдение явления резонанса в системе математического маятника
Проведем следующий эксперимент. Соединим математический маятник с метрономом (рис. 16). Изменяя частоту колебаний маятника метронома, добиваемся увеличения амплитуды колебаний математического маятника. Оказывается, что его амплитуда будет максимальной при совпадении собственной частоты колебаний маятника и маятника метронома.
Колебания тел под действием внешней периодической силы называются вынужденными, а сила — вынуждающей. В случае гармонической силы:  или
или  . Вначале действия внешней силы наблюдается достаточно сложное движение тела. Спустя некоторое время после начала действия внешней силы колебания приобретают стационарный характер и не зависят от начальных условий. Таким образом, при вынужденных колебаниях система полностью «забывает» свое начальное состояние. Частота установившихся вынужденных колебаний всегда равна частоте вынуждающей силы.
. Вначале действия внешней силы наблюдается достаточно сложное движение тела. Спустя некоторое время после начала действия внешней силы колебания приобретают стационарный характер и не зависят от начальных условий. Таким образом, при вынужденных колебаниях система полностью «забывает» свое начальное состояние. Частота установившихся вынужденных колебаний всегда равна частоте вынуждающей силы.
Амплитуда колебаний и энергия, передаваемая системе за период вынужденных колебаний, зависят от того, насколько различаются частота  вынуждающей силы и частота
вынуждающей силы и частота  собственных колебаний, а также от величины трения в системе.
собственных колебаний, а также от величины трения в системе.
При вынужденных колебаниях возможно явление, называемое резонансом (от лат. resono — откликаюсь, звучу в ответ).
Резонанс — это явление резкого возрастания амплитуды вынужденных колебаний при действии на колебательную систему внешней силы с частотой со, совпадающей с собственной частотой системы  (рис. 17).
(рис. 17).
Подвесим на упругой нити  четыре математических маятника с одинаковыми грузами, три из которых имеют различную длину, а длина четвертого равна длине второго (рис. 18). Сначала посмотрим, что будет с маятниками, если раскачать первый или третий маятник. Наблюдения показывают, что через некоторое время начнут качаться и остальные маятники. Но амплитуда их колебаний мала, и вскоре колебания затухают. А вот если раскачать второй маятник, то амплитуда колебаний четвертого будет непрерывно возрастать, пока не достигнет наибольшего значения.
четыре математических маятника с одинаковыми грузами, три из которых имеют различную длину, а длина четвертого равна длине второго (рис. 18). Сначала посмотрим, что будет с маятниками, если раскачать первый или третий маятник. Наблюдения показывают, что через некоторое время начнут качаться и остальные маятники. Но амплитуда их колебаний мала, и вскоре колебания затухают. А вот если раскачать второй маятник, то амплитуда колебаний четвертого будет непрерывно возрастать, пока не достигнет наибольшего значения.
Это происходит потому, что частота собственных колебаний четвертого маятника совпадает с частотой колебаний внешней силы (частотой колебаний второго маятника), так как их длины равны. А колебания первого и третьего маятников, как и в первом эксперименте, быстро затухают.
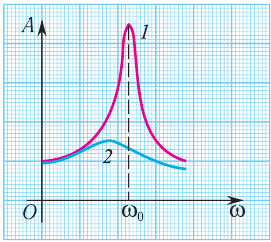
Рис. 17. Резонанс: 1 — малая сила трения; 2 — большая сила трения
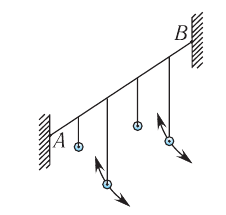
Рис. 18. Наблюдение явления резонанса в системе маятников
При резонансе создаются оптимальные условия для передачи системе энергии от внешнего источника, так как в течение всего периода работа внешней силы над системой положительна. Вспомните процесс раскачивания на качелях: если качели толкать очень быстро или очень медленно, их практически невозможно будет раскачать. Если же подбирать частоту толчков, близкую к частоте собственных колебаний качелей, то раскачивание будет эффективным.
Большинство сооружений и машин, обладая определенной упругостью, способны совершать свободные колебания. Поэтому при внешних периодических воздействиях в них вследствие явления резонанса могут возбуждаться колебания большой амплитуды, которые могут привести к разрушительным последствиям. Например, для исключения разрушения мостов вследствие явления резонанса при прохождении по ним войсковых частей приказывают идти вольным шагом (не в ногу). Поезда переезжают мосты либо очень медленно, либо с максимальной скоростью.
В 1750 г. цепной мост вблизи г. Анжер (Франция) был разрушен в результате резонанса, во время прохождения по нему отряда солдат, так как частота их шага совпала с частотой свободных колебаний моста.
В 1906 г. в г. Петербурге (Россия) обрушился Египетский мост, по которому проходил кавалерийский эскадрон.
7 ноября 1940 г. сильный порыв ветра вызвал резонансные колебания Такомского моста (США), что привело к его разрушению.
Пример №6
Определите модуль скорости  движения поезда, при которой математический маятник, подвешенный в вагоне, особенно сильно раскачивается. Длина маятника
движения поезда, при которой математический маятник, подвешенный в вагоне, особенно сильно раскачивается. Длина маятника  , длина рельса
, длина рельса  .
.
Решение
Маятник начинает сильно раскачиваться, когда частота его собственных колебаний
совпадает с частотой вынуждающей силы
которая совпадает с частотой ударов колес вагона о стыки рельсов:  .
.
Отсюда

Ответ:  .
.
Распространение колебаний в упругой среде. Продольные и поперечные волны
Что будет происходить, если горизонтальные пружинные маятники соединить друг с другом в цепочку (рис. 19) и подействовать на один из шариков (например, первый) периодической внешней силой, направленной вдоль цепочки?

Рис. 19. Цепочка соединенных пружинами шариков
Поскольку между телами цепочки действуют силы упругости, обусловленные пружинами, то в колебательное движение вдоль цепочки с той же частотой придут и все последующие шарики. Будет происходить процесс распространения колебаний, но колебания каждого последующего шарика будут запаздывать по сравнению с колебаниями предыдущего. Это запаздывание обусловлено инертностью шариков, смещения которых определяют силы упругости пружин.
Рассмотренная система (цепочка шариков, связанных между собой пружинами) представляет собой простейшую (одномерную) модель упругой среды. Упругой называется среда, частицы которой связаны между собой силами упругости.
Результаты экспериментов показывают, что колебания, возбужденные в какой-либо точке упругой среды, с течением времени передаются в ее другие точки. Так, от камня, брошенного в спокойную воду озера, кругами расходятся волны, которые со временем достигают берега. Колебания сердца, расположенного внутри грудной клетки, можно ощутить на запястье, что используется для определения пульса. Перечисленные примеры связаны с явлением распространения механических колебаний в среде.
Механической (упругой) волной называется процесс распространения колебаний в упругой среде, который сопровождается передачей энергии от одной точки среды к другой.
Механические волны не могут распространяться в безвоздушном пространстве.
Источником механических волн всегда является какое-либо колеблющееся тело. Колеблющееся тело, которое создает волновое движение в окружающей среде, называется источником колебаний (вибратором). Механизм образования волны можно представить следующим образом. Источник колебаний (например, камертон) воздействует на частицы упругой среды, соприкасающиеся с ним, и заставляет их совершать вынужденные колебания (рис. 20).
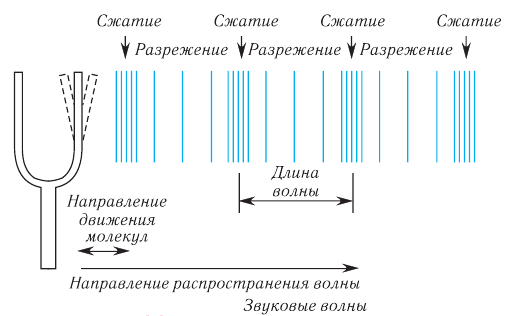
Рис. 20. Образование звуковых волн при колебании камертона
Среда вблизи источника деформируется, и в ней возникают силы упругости, препятствующие деформации. Если частицы среды сближаются, то возникающие силы их отталкивают, а если удаляются друг от друга, то, наоборот, притягивают. Постепенно силы будут действовать на все более удаленные от источника частицы среды, приводя их в колебательное движение. В результате оно будет распространяться в виде волны.
Если источник колебаний колеблется синусоидально, то и волна в упругой среде будет иметь форму синусоиды. Колебания, вызванные в каком-либо месте упругой среды, распространяются в ней с определенной скоростью, зависящей от плотности и упругих свойств среды.
Подчеркнем, что при распространении волн отсутствует перенос вещества, т. е. частицы среды при этом колеблются вблизи положений равновесия.
Волновой фронт (волновая поверхность) — это поверхность, все точки которой колеблются в одинаковых фазах, т. е. это поверхность равных фаз. Если волновыми поверхностями являются плоскости, то волна называется плоской.
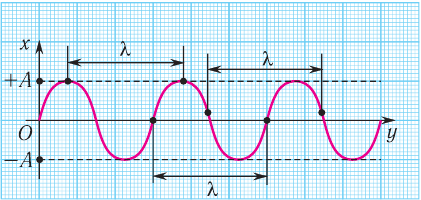
Рис. 21. Основные характеристики волны
Основными характеристиками волны являются (рис. 21):
амплитуда  — модуль максимального смещения точек среды из положений равновесия при колебаниях;
— модуль максимального смещения точек среды из положений равновесия при колебаниях;
период  — время полного колебания (период колебаний точек среды равен периоду колебаний источника волны):
— время полного колебания (период колебаний точек среды равен периоду колебаний источника волны):

где  — промежуток времени, в течение которого совершаются
— промежуток времени, в течение которого совершаются  колебаний;
колебаний;
частота  — число полных колебаний, совершаемых в данной точке в единицу времени:
— число полных колебаний, совершаемых в данной точке в единицу времени:

частота волны определяется частотой колебаний источника;
длина волны  — наименьшее расстояние между двумя точками, колебания в которых происходят в одинаковой фазе, т. е. расстояние, на которое волна распространяется за промежуток времени, равный периоду колебаний источника:
— наименьшее расстояние между двумя точками, колебания в которых происходят в одинаковой фазе, т. е. расстояние, на которое волна распространяется за промежуток времени, равный периоду колебаний источника:
скорость распространения волны  — это скорость распространения гребня волны или любой другой точки волны с определенной фазой (это не скорость частиц), модуль этой скорости:
— это скорость распространения гребня волны или любой другой точки волны с определенной фазой (это не скорость частиц), модуль этой скорости:

Бегущую волну можно наблюдать, проведя следующий эксперимент. Если один конец резинового шнура, лежащего на гладком горизонтальном столе, закрепить и, слегка натянув шнур рукой, привести его второй конец в колебательное движение в направлении, перпендикулярном шнуру, то по нему побежит волна.
Волна называется продольной, если колебания частиц среды происходят вдоль направления распространения волны. Распространение волн вдоль цепочки горизонтальных пружинных маятников (см. рис. 19) является примером распространения продольных упругих волн. При этом распространение волны сопровождается образованием сгущений и разрежений вдоль направления ее распространения.
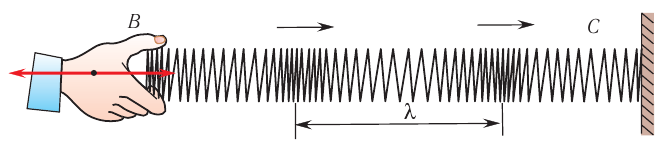
Рис. 22. Продольная волна
Продольную волну легко получить с помощью длинной пружины, которая лежит на гладкой горизонтальной поверхности и один конец ее закреплен. Легким ударом по свободному концу  пружины мы вызовем появление волны (рис. 22). При этом каждый виток пружины будет колебаться вдоль направления распространения волны
пружины мы вызовем появление волны (рис. 22). При этом каждый виток пружины будет колебаться вдоль направления распространения волны  . Упругие волны в газах и жидкостях возникают только при сжатии или разрежении среды и не могут возникать при сдвиге частиц жидкости или газа. Поэтому в таких средах возможно распространение только продольных волн.
. Упругие волны в газах и жидкостях возникают только при сжатии или разрежении среды и не могут возникать при сдвиге частиц жидкости или газа. Поэтому в таких средах возможно распространение только продольных волн.
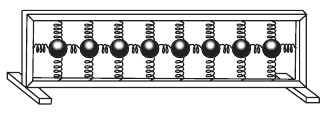
Рис. 23. Устройство для демонстрации продольных и поперечных волн
Волна называется поперечной, если частицы среды колеблются в плоскости, перпендикулярной направлению распространения волны. Поперечная волна будет распространяться вдоль цепочки пружинных маятников (рис. 23), если на один из них подействовать периодической силой, направленной перпендикулярно цепочке. Используя длинную пружину, можно также продемонстрировать распространение поперечных волн, если совершать колебания незакрепленного конца перпендикулярно продольной оси пружины (рис. 24).
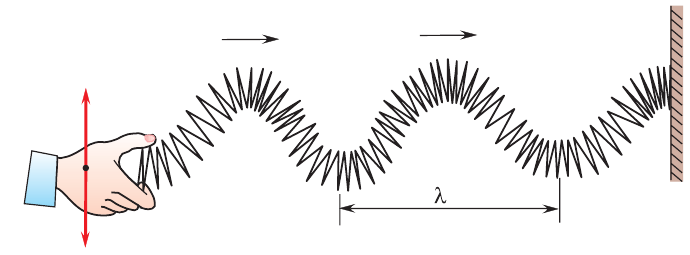
Рис. 24. Поперечная волна
В отличие от жидкостей и газов в твердых телах возможно распространение и поперечных волн, так как они возникают при смещении или сдвиге одних слоев среды относительно других. Вследствие того что распространение продольных волн связано с деформацией сжатия, поперечных — с деформацией сдвига, а упругие свойства тел в отношении этих видов деформации неодинаковы, то и скорости их распространения будут отличаться. Например, в стали поперечные волны распространяются со скоростью, модуль которой  , а продольные
, а продольные  .
.
Землетрясения являются источниками сейсмических волн, причем они могут быть как продольными, так и поперечными. Вследствие того что скорости продольных волн больше, чем скорости поперечных, по времени запаздывания поперечной волны можно определить расстояние до очага землетрясения.
Звук
Особенно важное место среди всех типов упругих волн занимают звуковые волны (звуки). Мир окружающих нас звуков разнообразен и сложен, однако мы достаточно легко ориентируемся в нем и можем безошибочно отличить пение птиц от шума городской улицы.
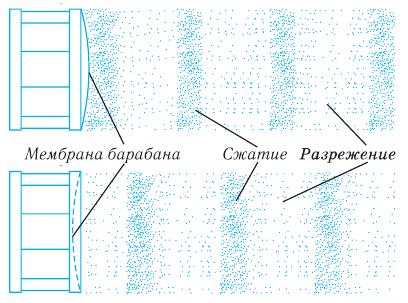
Рис. 25. Образование звуковой волны, создаваемой мембраной барабана
Рассмотрим в качестве примера источника звука барабан (рис. 25). Мембрана барабана создает попеременно сжатие и разрежение в прилегающей к ней области воздуха, и образуется продольная волна, которая распространяется в воздухе. Графически ее можно представить как зависимость плотности молекул воздуха от координаты (рис. 26).
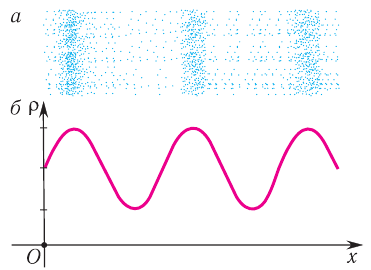
Рис. 26. Зависимость плотности  воздуха от координаты
воздуха от координаты  в продольной волне
в продольной волне
Таким образом, в процессе распространения звуковой волны с течением времени изменяются такие характеристики среды, как плотность и давление.
Для распространения звуковых волн необходимы среды с упругими свойствами. Если поместить источник звука (звонок) под колокол воздушного насоса и постепенно откачивать воздух, то звук становится все слабее и слабее, а затем исчезает. Следовательно, звуковые волны в безвоздушном пространстве не распространяются.
Если окружить звонок слоем пористого материала (поролона, ваты, войлока и т. п.), то звуковые волны в нем быстро затухают. Поэтому такие материалы широко используются для звукоизоляции.
Упругие волны, вызывающие у человека слуховые ощущения, называются звуковыми волнами или просто звуком. Человеческое ухо воспринимает звук в частотном диапазоне от 16 до 20 ООО Гц.
Раздел физики, в котором изучаются звуковые явления, называется акустикой.
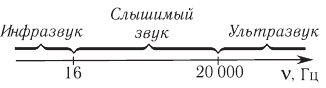
Рис. 27. Шкала звуковых волн
Звуковые волны классифицируются по частоте следующим образом (рис. 27):
Многие животные могут воспринимать ультразвуки. Например, собаки могут слышать звуки частотой до  , а летучие мыши — до
, а летучие мыши — до  . Инфразвук, распространяясь в воде на сотни километров, помогает китам и многим другим морским животным ориентироваться в толще воды.
. Инфразвук, распространяясь в воде на сотни километров, помогает китам и многим другим морским животным ориентироваться в толще воды.
Основными физическими характеристиками звука являются интенсивность и спектральный состав (спектр).
Для характеристики энергии, переносимой волнами, используется понятие интенсивности волны  , определяемое как энергия
, определяемое как энергия  , переносимая волной в единицу времени
, переносимая волной в единицу времени  через поверхность площадью
через поверхность площадью  , расположенную перпендикулярно к направлению распространения волны:
, расположенную перпендикулярно к направлению распространения волны:
Другими словами, интенсивность представляет собой мощность  , переносимую волнами через поверхность единичной площади перпендикулярно к направлению распространения волны.
, переносимую волнами через поверхность единичной площади перпендикулярно к направлению распространения волны.
Единицей интенсивности в СИ является 1 ватт на метр в квадрате  .
.
Уровень интенсивности звука  определяют обычно, используя шкалу, единицей которой является 1 бел
определяют обычно, используя шкалу, единицей которой является 1 бел  или ее дольная единица — 1 децибел
или ее дольная единица — 1 децибел  (одна десятая бела). Уровень интенсивности самого слабого звука, который воспринимает наше ухо, соответствует 1 белу
(одна десятая бела). Уровень интенсивности самого слабого звука, который воспринимает наше ухо, соответствует 1 белу  . Единица названа в честь изобретателя телефона Александра Белла.
. Единица названа в честь изобретателя телефона Александра Белла.
Так, поезд метро создает уровень интенсивности звука  , мощные усилители —
, мощные усилители —  , а реактивный самолет —
, а реактивный самолет —  . Тем, кто при работе подвергается воздействию шума свыше , следует пользоваться наушниками.
. Тем, кто при работе подвергается воздействию шума свыше , следует пользоваться наушниками.
Интенсивность звука, улавливаемого ухом человека, лежит в очень широких пределах: от  (порог слышимости) до
(порог слышимости) до  (порог болевого ощущения) (рис. 28).
(порог болевого ощущения) (рис. 28).
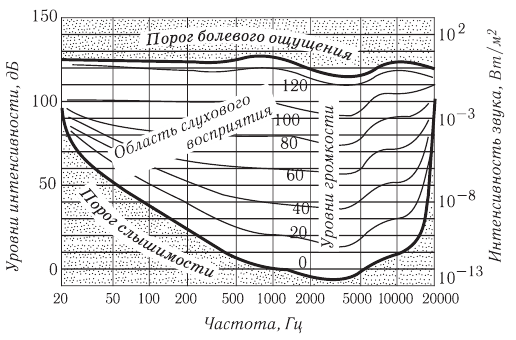
Рис. 28. Диаграмма восприятия звука ухом человека
Минимальная интенсивность, при которой ухо человека перестает воспринимать звук, называется порогом слышимости. Кривая порога слышимости для всего звукового диапазона приведена на рисунке 28 (в логарифмическом масштабе). Наиболее чувствительно наше ухо к волнам частотой примерно  , так как интенсивности порядка
, так как интенсивности порядка  уже достаточно, чтобы ухо восприняло звук. А для того, чтобы услышать звук на частоте
уже достаточно, чтобы ухо восприняло звук. А для того, чтобы услышать звук на частоте  , его интенсивность должна быть примерно в
, его интенсивность должна быть примерно в  раз больше, т. е. порядка
раз больше, т. е. порядка  .
.
При значительной интенсивности колебаний ухо перестает воспринимать колебания как звук, испытывая при этом болевое ощущение. Такая интенсивность, выше которой отмечается боль, называется порогом болевого ощущения. Порог болевого ощущения соответствует интенсивности, равной примерно  .
.
Реактивный самолет может создать звук интенсивностью порядка  , мощные усилители на концерте в закрытом помещении — до
, мощные усилители на концерте в закрытом помещении — до  , поезд метро —
, поезд метро —  .
.
В технике предпочитают измерять изменение интенсивности звука не по изменению энергии волны (на диаграмме справа), а в других единицах — децибелах (на диаграмме слева).
Таким образом, для возникновения звуковых ощущений необходимо:
наличие источника звука;
наличие упругой среды между источником звука и ухом;
частота колебаний источника звука должна находиться в пределах  ;
;
мощность звуковых волн должна быть достаточной для того, чтобы вызывать ощущение звука.
Спектром называется набор звуков различных частот, образующих данный звуковой сигнал. Спектр может быть сплошным или дискретным.
Сплошной спектр означает, что в данном наборе присутствуют волны, частоты которых заполняют весь заданный спектральный диапазон.
Дискретный спектр означает наличие конечного числа волн с определенными частотами и амплитудами, которые образуют рассматриваемый сигнал.
По типу спектра звуки разделяются на шумы и музыкальные тоны.
Шум — совокупность разнообразных кратковременных звуков (хруст, шелест, шорох, стук и т. п.) — представляет собой наложение большого числа колебаний с близкими амплитудами, но различными частотами (имеет сплошной спектр).
Музыкальный тон создается периодическими колебаниями звучащего тела (камертон, струна) и представляет собой гармоническое колебание одной частоты. На основе музыкальных тонов создана музыкальная азбука — ноты (до, ре, ми, фа, соль, ля, си), которые позволяют воспроизводить одну и ту же мелодию на различных музыкальных инструментах. Интервал частот музыкальных звуков, на границах которого звуки по частоте отличаются в 2 раза, называют октавой.
Музыкальный звук (созвучие) — результат наложения нескольких одновременно звучащих музыкальных тонов, из которых можно выделить основной тон, соответствующий наименьшей частоте. Основной тон называется также первой гармоникой. Все остальные тоны называются обертонами. Обертоны называются гармоническими, если частоты обертонов кратны частоте основного тона. Таким образом, музыкальный звук имеет дискретный спектр.
Физическим характеристикам звука соответствуют определенные (субъективные) характеристики, связанные с восприятием его конкретным человеком. Это обусловлено тем, что восприятие звука — процесс не только физический, но и физиологический. Человеческое ухо воспринимает звуковые колебания определенных частот и интенсивностей (это объективные, не зависящие от человека характеристики звука) по-разному, в зависимости от «характеристик приемника» (здесь влияют субъективные индивидуальные черты каждого человека).
Основными физиологическими характеристиками звука являются громкость, высота и тембр.
Громкость (степень слышимости звука) определяется как интенсивностью звука (амплитудой колебаний в звуковой волне), так и различной чувствительностью человеческого уха на разных частотах. Наибольшей чувствительностью человеческое ухо обладает в диапазоне частот от  до
до  .
.
С возрастом порог слышимости человека возрастает. Следует отметить, что болевой порог изменяется в зависимости от частоты не столь существенно, как порог слышимости.
При увеличении интенсивности в 10 раз уровень громкости увеличивается на  . Вследствие этого звук в
. Вследствие этого звук в  оказывается в 100 раз интенсивнее звука в
оказывается в 100 раз интенсивнее звука в  .
.
Высота звука определяется частотой звуковых колебаний, обладающих наибольшей интенсивностью в спектре.
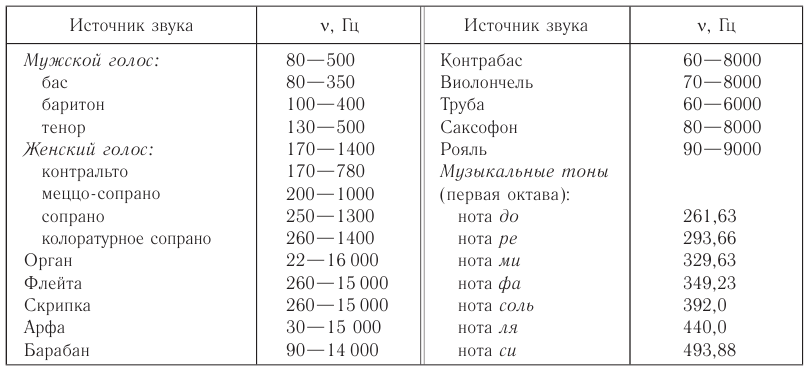
Тембр (оттенок звука) зависит от того, сколько обертонов присоединяются к основному тону и какова их интенсивность и частота. По тембру мы легко отличаем звуки скрипки и рояля, флейты и гитары, голоса людей (табл. 2) и т. д.
Таблица 2. Частота колебаний различных источников звука
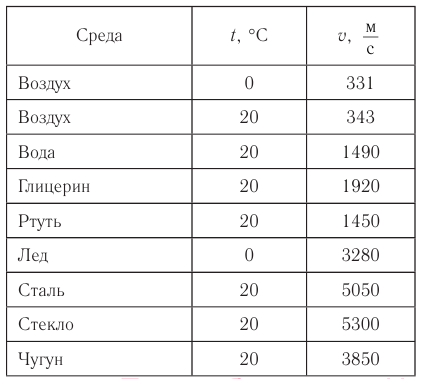
Модуль скорости звука зависит от упругих свойств, плотности и температуры среды. Чем больше упругие силы, тем быстрее передаются колебания частиц соседним частицам и тем быстрее распространяется волна. Поэтому модуль скорости звука в газах меньше, чем в жидкостях, а в жидкостях, как правило, меньше, чем в твердых телах (табл. 3).
Таблица 3. Скорость звука в различных средах
Модуль скорости звука в идеальных газах с ростом температуры растет пропорционально  , где
, где  — абсолютная температура. В воздухе модуль скорости звука
— абсолютная температура. В воздухе модуль скорости звука  при температуре
при температуре  и
и  при температуре
при температуре  . В жидкостях и металлах модуль скорости звука, как правило, уменьшается с ростом температуры (исключение — вода).
. В жидкостях и металлах модуль скорости звука, как правило, уменьшается с ростом температуры (исключение — вода).
Впервые модуль скорости звука в воздухе был определен в 1640 г. французским физиком Мареном Мер-сенном. Он измерял промежуток времени между моментами появления вспышки и звука при ружейном выстреле. Мерсенн определил, что модуль скорости звука в воздухе равен  .
.
Способ ориентации или исследования окружающих объектов, основанный на излучении ультразвуковых импульсов с последующим восприятием отраженных импульсов (эха) от различных объектов, называется эхолокацией, а соответствующие приборы — эхолокаторами.
Эхолокацию используют различные китообразные (дельфины), а также летучие мыши, птицы гуахаро, гнездящиеся в глубоких пещерах Венесуэлы и на острове Тринидад, стрижи-салаганы, живущие в пещерах Юго-Восточной Азии. Волны ультразвуковых частот широко используются в медицине в диагностических целях. УЗИ-сканеры позволяют исследовать внутренние органы человека.
Пример №7
Стальные детали проверяются ультразвуковым дефектоскопом. Определите толщину  детали и глубину
детали и глубину  расположения дефекта, если после излучения ультразвукового сигнала получены два отраженных сигнала через промежутки времени
расположения дефекта, если после излучения ультразвукового сигнала получены два отраженных сигнала через промежутки времени  и
и  . Модуль скорости распространения ультразвука
. Модуль скорости распространения ультразвука  .
.
Решение
Так как сигнал проходит деталь туда и обратно, то толщину детали определим по формуле:

Аналогично определяется глубина, на которой находится дефект:

Ответ:  .
.
Итоги:
Периодическим называется движение, при котором физические величины, характеризующие колебательную систему, через равные промежутки времени принимают одинаковые значения.
Колебательным называется движение (процесс), при котором любая характеризующая это движение (процесс) физическая величина поочередно изменяется то в одну, то в другую сторону от ее значения в положении устойчивого равновесия.
Периодическим колебательным движением (колебаниями) называют любой процесс, который обладает свойством повторяемости во времени.
Колебания любой физической природы, описываемые уравнением

являются гармоническими, а система, совершающая такие колебания, — гармонической колебательной системой, или гармоническим осциллятором.
Колебания, при которых зависимость координаты (смещения) тела от времени определяется соотношениями

или

называются гармоническими.
Зависимость координаты от времени  называется кинематическим законом гармонических колебаний (законом движения).
называется кинематическим законом гармонических колебаний (законом движения).
Колебания материальной точки являются гармоническими, если они происходят под действием возвращающей силы, модуль которой прямо пропорционален смещению точки из положения равновесия  , направленной к положению равновесия колеблющегося тела.
, направленной к положению равновесия колеблющегося тела.
Амплитуда колебаний  — максимальное смещение
— максимальное смещение  тела или системы тел из положения равновесия.
тела или системы тел из положения равновесия.
Фаза колебаний  определяет состояние колебательной системы (координаты, скорость, ускорение) в любой момент времени при заданной амплитуде. В начальный момент времени
определяет состояние колебательной системы (координаты, скорость, ускорение) в любой момент времени при заданной амплитуде. В начальный момент времени  она равна начальной фазе
она равна начальной фазе  .
.
Единицей фазы является 1 радиан  .
.
Циклическая частота  — число полных колебаний за промежуток времени
— число полных колебаний за промежуток времени  секунд:
секунд:

Период колебания  — время одного полного колебания:
— время одного полного колебания:

Частота колебаний  — число полных колебаний, совершаемых в единицу времени:
— число полных колебаний, совершаемых в единицу времени:
Колебательная система, состоящая из тела с прикрепленной к нему пружиной, называется пружинным маятником. Его период колебаний:
Колебательная система, состоящая из небольшого тела, подвешенного на легкой нерастяжимой нити, называется математическим маятником.
Период малых колебаний математического маятника определяется по формуле Гюйгенса:
Собственные (свободные) колебания — это колебания, происходящие в отсутствие внешних воздействий на систему. Они происходят со строго определенной частотой, называемой частотой собственных колебаний системы.
Затухающими называются колебания, энергия которых уменьшается с течением времени.
Вынужденными называются колебания системы, вызываемые действием на нее периодических внешних сил.
Резонансом называется явление резкого возрастания амплитуды вынужденных колебаний, когда частота периодической внешней силы совпадает с собственной частотой колебаний системы.
Механической волной называется процесс распространения колебаний в упругой среде, который сопровождается передачей энергии от одной точки среды к другой.
Длина волны — расстояние, пройденное волной в среде за промежуток времени, равный периоду колебаний частиц:

Скорость распространения волны — это скорость распространения гребня волны или любой другой точки волны с определенной фазой, модуль которой

Волна называется продольной, если колебания частиц среды происходят вдоль направления распространения волны.
Волна называется поперечной, если частицы среды колеблются в плоскости, перпендикулярной направлению распространения волны.
Упругие волны, вызывающие у человека слуховые ощущения, называются звуковыми волнами или просто звуком.
Основными физическими характеристиками звука являются интенсивность и спектральный состав (спектр).
Единицы основных величин механических колебаний и волн
Механические и электромагнитные волны
В курсе физики вы изучали механические колебания. Часто бывает так, что, возникнув в одном месте, колебания распространяются в соседние области пространства. Вспомните, например, распространение колебаний от брошенного в воду камешка или колебания земной коры, распространяющиеся от эпицентра землетрясения. В таких случаях говорят о волновом движении — волнах (рис. 17.1). Из этого параграфа вы узнаете об особенностях волнового движения.
Рис. 17.1. От камешка, брошенного в воду, по поверхности воды распространяются волны
Возникновение и распространение механических волн
Создаем механические волны:
Возьмем довольно длинную веревку, один конец которой прикрепим к вертикальной поверхности, а второй будем двигать вниз-вверх (колебать). Колебания от руки распространятся по веревке, постепенно вовлекая в колебательное движение все более удаленные точки, — по веревке побежит механическая волна (рис. 17.2).
Рис. 17.2. Распространение волны вдоль веревки. Стрелка показывает направление распространения волны
Механической волной называют распространение колебаний в упругой среде*.
* Среду называют упругой, если при ее деформации возникают силы, противодействующие этой деформации, — силы упругости.
Теперь закрепим горизонтально длинную мягкую пружину и нанесем по ее свободному концу серию последовательных ударов — в пружине побежит волна, состоящая из сгущений и разрежений витков пружины (рис. 17.3).
Рис. 17.3. Распространение волны в пружине. Стрелка показывает направление распространения волны
Описанные выше волны можно увидеть, однако большинство механических волн невидимы, например звуковые волны (рис. 17.4).
На первый взгляд, все механические волны абсолютно разные, но причины их возникновения и распространения одинаковы.
Как и почему в среде распространяется механическая волна
Любая механическая волна создается колеблющимся телом — источником волны. Осуществляя колебательное движение, источник волны деформирует ближайшие к нему слои среды (сжимает и растягивает их либо смещает). В результате возникают силы упругости, которые действуют на соседние слои среды и заставляют их осуществлять вынужденные колебания. Эти слои, в свою очередь, деформируют следующие слои и заставляют их колебаться. Постепенно, один за другим, все слои среды вовлекаются в колебательное движение — в среде распространяется механическая волна.
Поперечные и продольные механические волны
Сравним распространение волны вдоль веревки (см. рис. 17.2) и в пружине (см. рис. 17.3).
Отдельные части веревки движутся (колеблются) перпендикулярно направлению распространения волны (на рис. 17.2 волна распространяется справа налево, а части веревки движутся вниз-вверх). Такие волны называют поперечными (рис. 17.5). При распространении поперечных волн происходит смещение одних слоев среды относительно других. Деформация смещения сопровождается возникновением сил упругости только в твердых телах, поэтому поперечные волны не могут распространяться в жидкостях и газах. Итак, поперечные волны распространяются только в твердых телах.
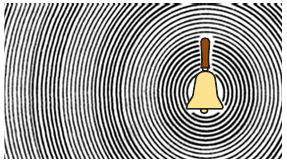
Рис. 17.4. Колебания звучащего тела являются причиной поочередных сгущений и разрежений среды — в среде распространяется звуковая волна
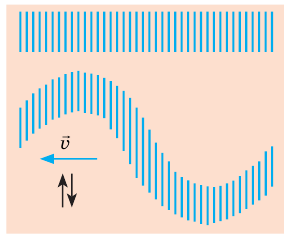
Рис. 17.5. В поперечной волне слои среды колеблются перпендикулярно направлению распространения волны
При распространении волны в пружине витки пружины движутся (колеблются) вдоль направления распространения волны. Такие волны называют продольными (рис. 17.6). Когда распространяется продольная волна, в среде происходят деформации сжатия и растяжения (вдоль направления распространения волны плотность среды то увеличивается, то уменьшается). Такие деформации в любой среде сопровождаются возникновением сил упругости. Поэтому продольные волны распространяются и в твердых телах, и в жидкостях, и в газах.
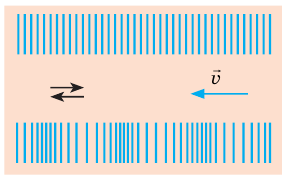
Рис. 17.6. В продольной волне слои среды колеблются вдоль направления распространения волны
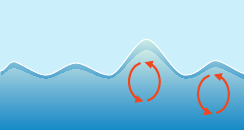
Волны на поверхности жидкости не являются ни продольными, ни поперечными. Они имеют сложный продольно-поперечный характер, при этом частицы жидкости движутся по эллипсам. В этом легко убедиться, если бросить в море легкую щепку и понаблюдать за ее движением на поверхности воды.
Основные свойства волн
- Колебательное движение от одной точки среды к другой передается не мгновенно, а с некоторым опозданием, поэтому волны, распространяются в среде с конечной скоростью.
- Источник механических волн — колеблющееся тело. При распространении волны колебания частей среды — вынужденные, поэтому частота колебаний каждой части среды равна частоте колебаний источника волны.
- Механические волны не могут распространяться в вакууме.
- Волновое движение не сопровождается переносом вещества — части среды всего лишь колеблются относительно положений равновесия.
- С приходом волны части среды приходят в движение (приобретают кинетическую энергию). Это означает, что при распространении волны происходит перенос энергии.
Перенос энергии без переноса вещества — важнейшее свойство любой волны.
Физические величины, характеризующие колебания
Волна — это распространение колебаний, поэтому физические величины, характеризующие колебания (частота, период, амплитуда), также характеризуют и волну. Итак, вспомним материал 7 класса:
| Физические величины, характеризующие колебания | |||
Частота колебаний  |
Период колебаний  |
Амплитуда колебаний  |
|
| Определение | количество колебаний за единицу времени | время одного колебания | максимальное расстояние, на которое отклоняется точка от положения равновесия |
| Формула для определения |
|
|
 |
| Единица в СИ |
герц
|
секунда (с) |
метр (м) |

 — количество колебаний за интервал времени
— количество колебаний за интервал времени 

Обратите внимание! При распространении механической волны все части среды, в которой распространяется волна, колеблются с одинаковой частотой  которая равна частоте колебаний источника волны, поэтому период колебаний
которая равна частоте колебаний источника волны, поэтому период колебаний  для всех точек среды тоже одинаков, ведь
для всех точек среды тоже одинаков, ведь  А вот амплитуда колебаний постепенно уменьшается с отдалением от источника волны.
А вот амплитуда колебаний постепенно уменьшается с отдалением от источника волны.
Длину и скорость распространения волны
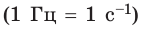
Вспомните распространение волны вдоль веревки. Пусть конец веревки осуществил одно полное колебание, то есть время распространения волны равно одному периоду  За это время волна распространилась на некоторое расстояние
За это время волна распространилась на некоторое расстояние  (рис. 17.8, а). Это расстояние называют длиной волны.
(рис. 17.8, а). Это расстояние называют длиной волны.
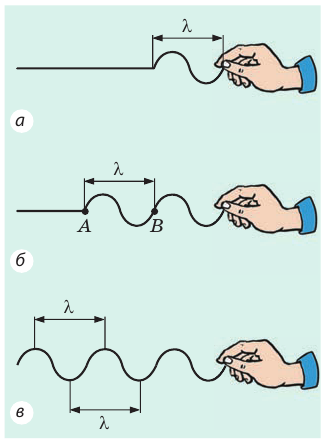
Рис. 17.8. Длина волны равна расстоянию, на которое распространяется волна за время одного колебания (это также расстояние между двумя ближайшими гребнями или двумя ближайшими впадинами)
Длина волны  — расстояние, на которое распространяется волна за время, равное периоду
— расстояние, на которое распространяется волна за время, равное периоду 
где  — скорость распространения волны.
— скорость распространения волны.
Единица длины волны в СИ — метр:

Нетрудно заметить, что точки веревки, расположенные друг от друга на расстоянии одной длины волны, колеблются синхронно — имеют одинаковую фазу колебаний (рис. 17.8, б, в). Например, точки А и В веревки одновременно движутся вверх, одновременно достигают гребня волны, затем одновременно начинают двигаться вниз и т. д.
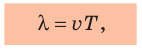
Воспользовавшись формулой  можно определить скорость распространения волны:
можно определить скорость распространения волны:  Учитывая, что
Учитывая, что  получим формулу взаимосвязи длины, частоты и скорости распространения волны — формулу волны:
получим формулу взаимосвязи длины, частоты и скорости распространения волны — формулу волны:
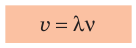
Если волна переходит из одной среды в другую, скорость ее распространения изменяется, а частота остается неизменной, поскольку частота определяется источником волны. Таким образом, согласно формуле  при переходе волны из одной среды в другую длина волны изменяется.
при переходе волны из одной среды в другую длина волны изменяется.
Формула волны

 — скорость распространения волны;
— скорость распространения волны;  — длина волны;
— длина волны;  — частота волны
— частота волны
Пример №8
Поперечная волна распространяется вдоль шнура со скоростью 3 м/с. На рис. 1 показано положение шнура в некоторый момент времени и направление распространения волны. Считая, что сторона клетки равна 15 см, определите:
1) амплитуду, период, частоту и длину волны;
2) направление, в котором в данный момент времени движутся точки К, В и С шнура.
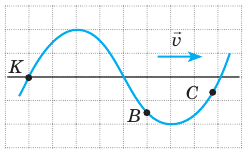
Рис. 1
Анализ физической проблемы, решение
Волна поперечная, поэтому точки шнура колеблются перпендикулярно направлению распространения волны (смещаются вниз-вверх относительно некоторых положений равновесия).
1) Из рис. 1 видим, что максимальное отклонение от положения равновесия (амплитуда А волны) равно 2 клеткам. Значит, 
Расстояние между гребнем и впадиной — 60 см (4 клетки), соответственно расстояние между двумя ближайшими гребнями (длина волны) вдвое больше. Значит, 
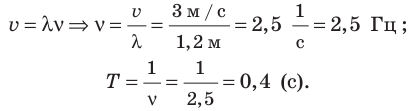
Частоту  и период
и период  волны найдем, воспользовавшись формулой волны:
волны найдем, воспользовавшись формулой волны:
2) Чтобы выяснить направление движения точек шнура, выполним дополнительное построение. Пусть за небольшой интервал времени  волна сместилась на некоторое небольшое расстояние. Поскольку волна смещается вправо, а ее форма со временем не изменяется, точки шнура займут положение, показанное на рис. 2 пунктиром.
волна сместилась на некоторое небольшое расстояние. Поскольку волна смещается вправо, а ее форма со временем не изменяется, точки шнура займут положение, показанное на рис. 2 пунктиром.
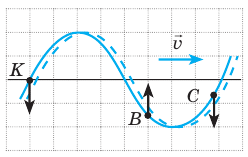
Рис. 2
Волна поперечная, то есть точки шнура движутся перпендикулярно направлению распространения волны. Из рис. 2 видим, что точка К через интервал времени  окажется ниже своего начального положения, следовательно, скорость ее движения направлена вниз; точка В переместится выше, следовательно, скорость ее движения направлена вверх; точка С переместится ниже, следовательно, скорость ее движения направлена вниз.
окажется ниже своего начального положения, следовательно, скорость ее движения направлена вниз; точка В переместится выше, следовательно, скорость ее движения направлена вверх; точка С переместится ниже, следовательно, скорость ее движения направлена вниз.
Ответ:  и
и  — вниз,
— вниз,  — вверх.
— вверх.
Подводим итоги:
Распространение колебаний в упругой среде называют механической волной. Механическую волну, в которой части среды колеблются перпендикулярно направлению распространения волны, называют поперечной; волну, в которой части среды колеблются вдоль направления распространения волны, называют продольной.
Волна распространяется в пространстве не мгновенно, а с некоторой скоростью. При распространении волны происходит перенос энергии без переноса вещества. Расстояние, на которое распространяется волна за время, равное периоду, называют длиной волны — это расстояние между двумя ближайшими точками, которые колеблются синхронно (имеют одинаковую фазу колебаний). Длина  частота
частота  и скорость
и скорость  распространения волны связаны формулой волны:
распространения волны связаны формулой волны: 
Виды механических колебаний и волн
Механические колебания окружают нас повсюду: покачивание ветвей деревьев, вибрация струн музыкальных инструментов, колебания поплавка на волне, движение маятника в часах, биение сердца и т. д. Колебательное движение, одно из самых распространенных в природе.
Механические колебания — это движения тела (или системы тел), происходящие около некоторого положения равновесия и точно или приблизительно повторяющиеся через равные интервалы времени.
Колебательное движение, как и любое другое движение, характеризуется такими физическими величинами, как скорость, ускорение, координата (смещение).
Смещение x — это расстояние от положения равновесия до точки, в которой в данный момент времени находится колеблющееся тело.
При колебаниях механическое состояние тела непрерывно изменяется. Если координата и скорость движения тела повторяются через равные интервалы времени, такие колебания называют периодическими. Существует ряд физических величин, характеризующих именно периодические колебания, в частности амплитуда, период, частота (см. рис. 19.1, таблицу).
Физические величины, характеризующие периодические колебания
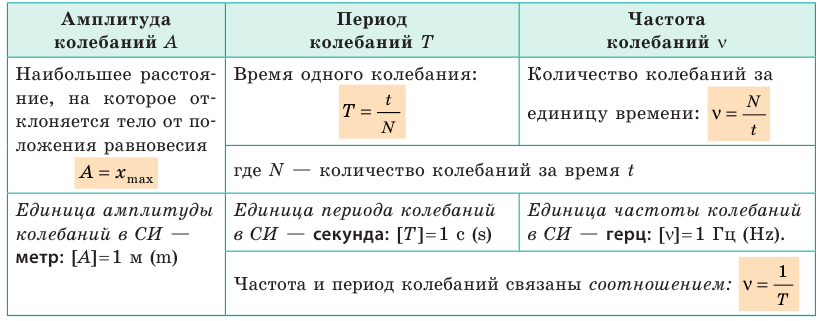
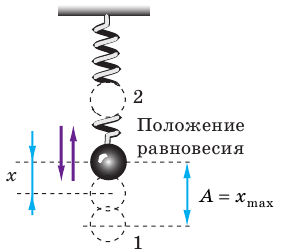
Рис. 19.1. Груз на пружине совершает периодические колебания (x — смещение груза; A — амплитуда колебаний). Интервал времени, за который груз переместился из положения 1 в положение 2 и обратно (время одного колебания), — период колебаний T
Незатухающие и затухающие колебания
Рассмотрим колебания груза на пружине (рис. 19.1). Если бы в системе «груз — пружина — Земля» не было потерь механической энергии, то колебания продолжались бы сколь угодно долго, а их амплитуда со временем не изменялась бы. Колебания, амплитуда которых со временем не изменяется, называют незатухающими.
Однако в любой системе всегда есть потери механической энергии. Энергия расходуется на преодоление сил трения, на деформацию тел во время колебаний. В результате механическая энергия постепенно переходит во внутреннюю. Поэтому, если система не получает энергию извне, то амплитуда колебаний постепенно уменьшается и спустя некоторое время колебания прекращаются (затухают). Колебания, амплитуда которых со временем уменьшается, называют затухающими.
Свободные и вынужденные колебания, автоколебания
Существуют колебания, которые происходят без внешнего периодического воздействия. Таковы, например, колебания подвешенного на нити или на пружине шара, возникающие после того, как шар отклонили от положения равновесия и отпустили. Такие колебания называют свободными.
Свободные колебания — это колебания, происходящие под действием внутренних сил системы после того, как система была выведена из положения равновесия.
Частота свободных колебаний определяется свойствами самой системы.
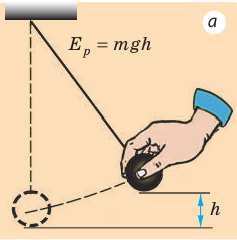
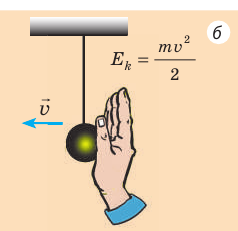
Рис. 19.2. Чтобы в колебательной системе возникли свободные колебания, необходимо вывести ее из положения равновесия — сообщить потенциальную (а) или кинетическую (б) энергию
Систему тел, в которой могут возникать свободные колебания, называют колебательной системой. Характерная черта колебательной системы — наличие положения устойчивого равновесия, около которого и происходят свободные колебания. Чтобы в колебательной системе возникли свободные колебания, необходимо выполнение двух условий:
- системе должна быть передана избыточная энергия (рис. 19.2);
- трение в системе должно быть достаточно мало, иначе колебания быстро затухнут или даже не возникнут.
При свободных колебаниях система не получает энергию извне, поэтому свободные колебания — это всегда затухающие колебания. Чем больше трение в системе, тем быстрее затухают колебания. Например, в воздухе колебания тела на пружине длятся достаточно долго, а в воде быстро затухают (на этом явлении основана работа гидравлических амортизаторов автомобилей (рис. 19.3)).
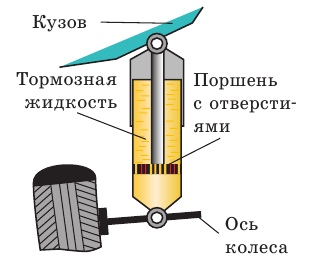
Рис. 19.3. С кузовом автомобиля соединяют поршень, который во время колебаний движется в цилиндре, заполненном жидкостью; значительное сопротивление жидкости приводит к затуханию колебаний
Существуют колебания (движение воздуха в духовых инструментах, поршня — в двигателе внутреннего сгорания и т. д.), которые совершаются, только когда на тело действуют периодически изменяющиеся внешние силы. Такие колебания называют вынужденными.
Вынужденные колебания — это колебания, происходящие в системе в результате действия внешней периодически изменяющейся силы.
Вынужденные колебания — это обычно незатухающие колебания, частота которых равна частоте изменения внешней силы, вынуждающей тело колебаться.
Есть системы, в которых незатухающие колебания существуют не благодаря периодическому внешнему воздействию, а в результате способности таких систем самим регулировать поступление энергии от постоянного (не периодического) источника. Такие системы называют автоколебательными, а незатухающие колебания в таких системах — автоколебаниями.
Незатухающие колебания, происходящие в системе за счет поступления энергии от постоянного источника, которое регулируется самой системой, называют автоколебаниями.
Частота автоколебаний, как и частота свободных колебаний, определяется свойствами самой системы. Примером механической автоколебательной системы может быть храповый механизм маятниковых часов (рис. 19.5).
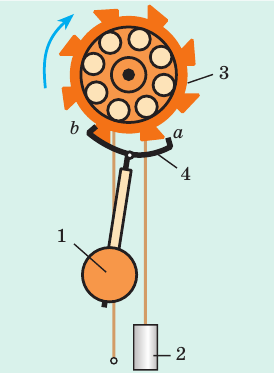
Рис. 19.5. Когда маятник 1 приближается к крайнему левому положению, палета b цепляется за зуб храпового колеса 3 и маятник получает толчок влево, приобретая дополнительную энергию
Практически в любой автоколебательной системе можно выделить три характерных элемента: колебательную систему, в которой могут происходить свободные колебания (в нашем примере это маятник 1 часов), источник энергии (поднятая гиря 2, которая поворачивает храповое колесо 3), устройство обратной связи, регулирующее поступление энергии от источника определенными порциями (анкер 4, посредством которого маятник «руководит», в какой момент гиря передает энергию храповому колесу).
Гармонические колебания
По характеру зависимости смещения (координаты) x тела от времени t его колебаний различают гармонические и негармонические колебания. Как правило, зависимость x (t) достаточно сложная (рис. 19.6). Рассмотрим график колебаний тела на пружине (рис. 19.6, в).
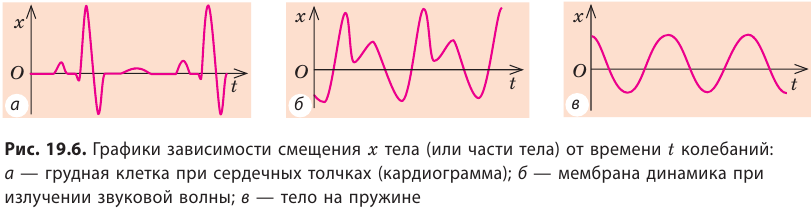
Кривая, изображенная на графике, — косинусоида. Колебания, при которых координата x колеблющегося тела изменяется с течением времени t по закону косинуса (или синуса), называют гармоническими колебаниями:

Данные уравнения называют уравнениями гармонических колебаний. Выясним, что означает в этих уравнениях каждая величина.
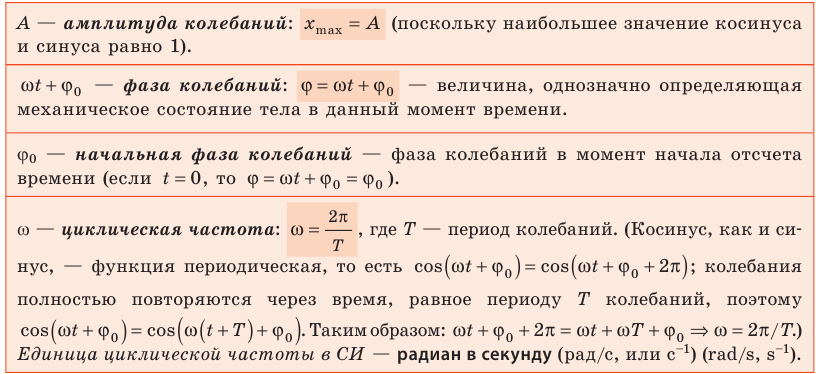
Обратите внимание! Если координата тела изменяется по гармоническому закону (по закону косинуса или синуса), скорость и ускорение движения тела тоже изменяются гармонически. При этом выполняются соотношения:

И наоборот: если в любой момент времени движения тела его ускорение прямо пропорционально смещению и направлено в сторону, противоположную смещению, то такое движение представляет собой гармонические колебания.
Обратите внимание!
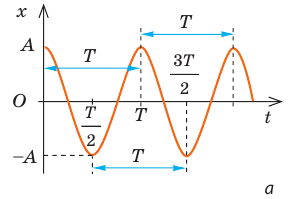
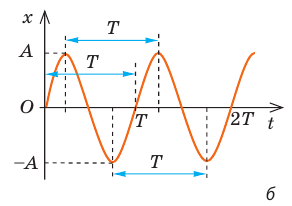
Рис. 19.7. Графики гармонических колебаний (A — амплитуда колебаний; Т — период колебаний). Координата колеблющегося тела изменяется в зависимости от времени t по закону: x = Acosωt (а); x = Asinωt (б)
Пример №9
По графику определите амплитуду и период колебаний тела. Вычислите циклическую частоту и максимальную скорость движения тела. Запишите уравнение колебаний. Найдите смещение тела в фазе  рад.
рад.

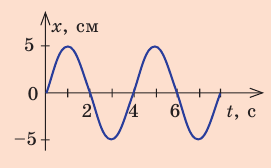
Решение:
График колебаний — синусоида, поэтому уравнение колебаний имеет вид: x = Аsinωt . Из графика видим: максимальное смещение тела равно 5 см:  ; тело совершает одно полное колебание за 4 с, следовательно, T= 4 с. Найдем циклическую частоту и максимальную скорость движения тела:
; тело совершает одно полное колебание за 4 с, следовательно, T= 4 с. Найдем циклическую частоту и максимальную скорость движения тела:
Подставим значения  в уравнение колебаний:
в уравнение колебаний:  (м).
(м).
Если 

Выводы:
- Движения, точно или приблизительно повторяющиеся через одинаковые интервалы времени, называют механическими колебаниями.
- Колебания, амплитуда которых со временем не изменяется, называют незатухающими; колебания, амплитуда которых со временем уменьшается, — затухающими.
- Колебания, происходящие в системе в результате действия периодически изменяющейся внешней силы, называют вынужденными, а происходящие под действием только внутренних сил системы, — свободными.
- Незатухающие колебания, происходящие в системе за счет поступления энергии от постоянного (не периодического) источника, которое регулируется самой системой, называют автоколебаниями.
- Колебания, в процессе которых смещение x колеблющегося тела изменяется с течением времени t по закону косинуса (или синуса), называют гармоническими. В общем случае уравнение гармонических колебаний имеет вид:
 , где A — амплитуда колебаний; — фаза колебаний — начальная фаза; ω — циклическая частота.
, где A — амплитуда колебаний; — фаза колебаний — начальная фаза; ω — циклическая частота.
 , где A — амплитуда колебаний;
, где A — амплитуда колебаний;  — фаза колебаний
— фаза колебаний  — начальная фаза; ω — циклическая частота.
— начальная фаза; ω — циклическая частота.Справочная информация о колебаниях
Колебанием называется процесс, при котором какая-либо физическая величина, характеризующая этот процесс, последовательно изменяется то в одну, то в другую сторону около некоторого своего среднего значения.
Например, на качелях, подвешенных на веревках, человек отклоняется то вперед и вверх, то назад и вверх от положения равновесия.
Механической колебательной системой называется совокупность тел, в которой могут происходить колебательные процессы. На рисунке 196 представлены наиболее простые механические колебательные системы: вертикальный пружинный маятник (рис. 196, а) образуют Земля, штатив, пружина и груз; физический маятник (рис. 196, б) — Земля, штатив и шарик на нити; горизонтальный пружинный маятник (рис. 196, в) — два штатива, две пружины и шарик.
Для возникновения колебаний в любой из этих систем необходимо вывести подвешенное тело из положения устойчивого равновесия.
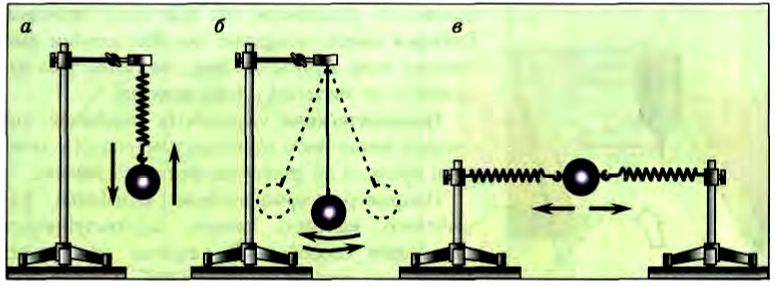
Рис. 196
Всякая колебательная система имеет положение устойчивого равновесия и самопроизвольно (без внешнего воздействия) из него выйти не может.
Периодическими называются колебания, повторяющиеся через определенный промежуток времени.
Периодом колебания называется промежуток времени, в течение которого совершается одно полное колебание. Если за промежуток времени t совершено N полных колебаний, то период определяется по формуле:

Частота колебаний, как и при вращательном движении, — величина, обратная периоду, равная числу колебаний, совершенных системой за одну секунду:
В СИ период измеряется в секундах (с), а частота — в герцах (Гц).
Смещением называется любое отклонение физической величины от ее значения в положении равновесия.
Амплитудой А называется максимальное смещение. На рисунке 197 показан горизонтальный пружинный маятник, состоящий из тела, которое может двигаться по гладкому столу (без трения) около положения равновесия под действием пружины. Выберем начало координат под положением равновесия тела. В этой системе смещение тела изменяется от значения -А до значения А.
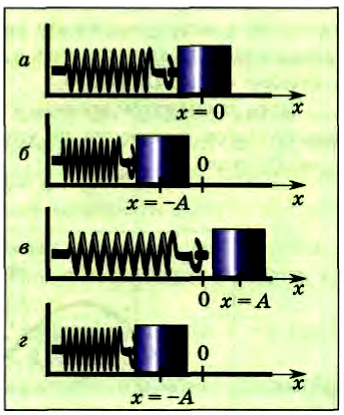
Рис. 197
Гармоническими называются колебания, при которых какая-либо величина изменяется с течением времени по закону синуса или косинуса.
Например, гармонические колебания физического маятника можно зарегистрировать следующим способом. В качестве груза взять небольшой флакон с чернилами, которые могут вытекать через очень маленькое отверстие снизу. Под колеблющимся маятником двигать равномерно по столу бумажную ленту (рис. 198).
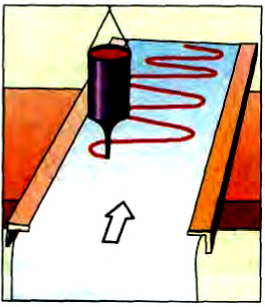
Рис. 198
Полученная на бумаге кривая (рис. 199) называется осциллограммой (лат. oscillum — колебание, греч. graphic — пишу) и представляет собой синусоиду или косинусоиду в зависимости от выбора начального момента времени наблюдения (момента отсчета времени).
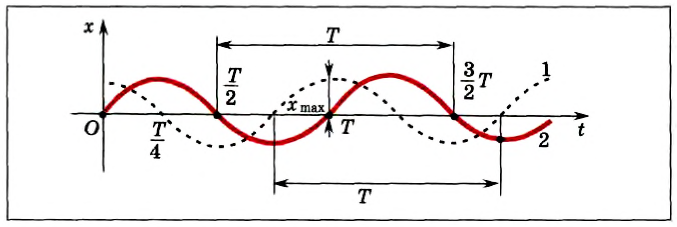
Рис. 199
Чтобы установить основные кинематические признаки гармонических колебаний, рассмотрим их математическую модель на примере изменения физических величин, характеризующих движение маленького шарика (материальной точки) по окружности с постоянной угловой скоростью ω. Начало координат поместим в центре окружности радиуса R. Пусть в начальный момент времени материальная точка находилась в положении M0 (рис. 200) и ее радиус-вектор составлял с осью Ox угол φ0.
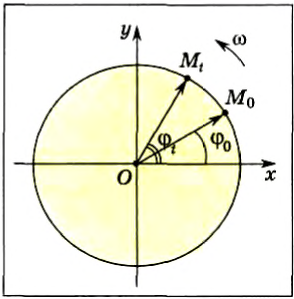
Рис. 200
Через промежуток времени t точка переместилась в положение M1, а ее радиус-вектор повернулся на угол ∆φ = ωt и составляет в данный момент с осью Ox угол
φ1 =φ0 +Δφ = φ0+ωt.
Тогда в момент времени / координаты точки:
 ;
;

Расположим перпендикулярно плоскости картона и перпендикулярно друг другу два экрана и будем освещать движущийся шарик (рис. 201). На вертикальном экране 1 тень от шарика будет двигаться вдоль оси Oy по закону yl =Rsinφt = Psin(ωt + φ0), т. е. совершать колебания возле начала координат. На горизонтальном экране тень шарика будет двигаться вдоль оси Ox по закону xl =Rcosφt = Pcos(ωt + φ0), и также совершать колебания около начала координат.
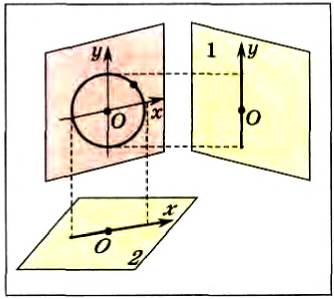
Рис. 201
Фазой колебания называется аргумент синуса или косинуса, или, в выбранной системе отсчета, угол между радиус-вектором и осью Ох. Так как sinφt = cos(90o-φt), то говорят, что колебания координаты xt сдвинуты по фазе на 90° или на  относительно колебаний координаты yt.
относительно колебаний координаты yt.
Начальная фаза колебания φ0 характеризует положение точки в начальный момент времени. Если в начальный момент времени шарик находится на оси Ох, то начальная фаза колебания равна нулю.
Так как -1 ≤sinφt≤ 1 и -1 ≤cosφt≤ 1, координаты шарика и его теней изменяются в пределах: -R ≤ xt ≤ R, -R ≤ yt ≤ R.
Таким образом, мгновенные значения координат хt и yt можно рассматривать как смещения от нулевого значения, а модуль амплитудного значения для обеих координат равен радиусу окружности: |xmax| = |mmax| = R.
Так как шарик движется с постоянной угловой скоростью ω, то модули его линейной скорости и центростремительного ускорения постоянны и равны υ = ωR, a = ω2R. Но направление каждого из этих векторов меняется с течением времени, и поэтому изменяются их проекции на оси координат.
Выразим проекции вектора скорости через ее модуль и угол поворота радиус-вектора (рис. 202, а):


Для проекций ускорения на оси координат (рис. 202, б):


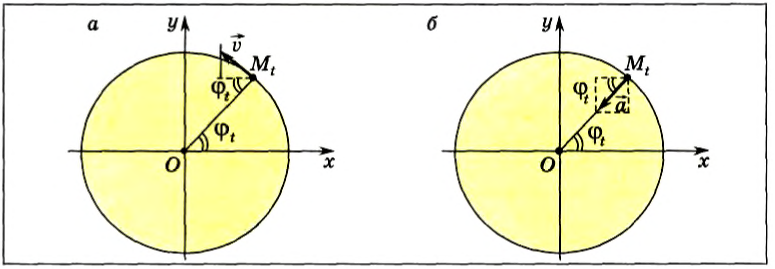
Рис. 202
Из этих уравнений следует, что проекции векторов скорости и ускорения также зависят от времени по гармоническому закону. Модули амплитудных значений проекций скорости равны:

а модули амплитудных значений проекций ускорения равны:

Следовательно, колебательное движение является сложным переменным движением, так как и скорость и ускорение точки зависят от времени.
Для упрощения примем, что в начальный момент движения точка находилась на оси Ох, т. е. φ0 = 0 и φt = ωt.
На рисунке 203 представлена зависимость координаты х (кривая 1) и проекции ускорения ах (кривая 2) на ось Ox от времени:

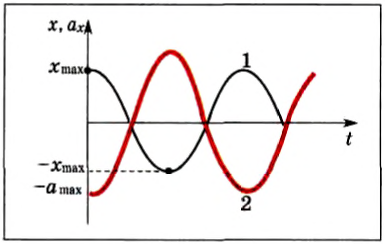
Рис. 203
На рисунке 204 представлена зависимость координаты у (кривая 1) и проекции ускорения ay( кривая 2) на ось Oy от времени:

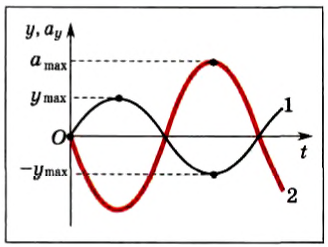
Рис. 204
Сравнение графиков каждой координаты с соответствующим графиком ускорения показывает: 1) графики проекций ускорений сдвинуты относительно графиков координат на 180o = π, или, как говорят, проекция ускорения изменяется с течением времени в противофазе изменению координаты; 2) в любой момент времени проекция ускорения пропорциональна координате (смещению): αy = -ω2yt, ax=-ω2xt, с коэффициентом пропорциональности ω2. Знак «-» соответствует противоположному отклонению проекций ускорения и координат от нулевых значений в любой момент времени.
Соотношения αy = -ω2yt, ax=-ω2xt являются основным признаком гармонических колебаний, так как справедливы только для гармонически изменяющихся с течением времени величин.
При гармонических колебаниях ускорение направлено к положению равновесия, противоположно по фазе смещению, а модуль ускорения пропорционален модулю смещения с коэффициентом пропорциональности ω2.
Физическая величина ω называется циклической частотой гармонических
колебаний:
Циклическая частота измеряется в радианах в секунду ( ).
).
Необходимо отметить, что если при рассмотрении какого-нибудь колебательного процесса получено соотношение, подобное ax =-ω2xt, то можно считать этот процесс зависящим от времени по гармоническому закону. Тогда по формуле  можно определить период этих колебаний.
можно определить период этих колебаний.
Главные выводы:
- При колебательном движении физическая величина изменяется только в определенном интервале значений, отклоняясь от равновесного значения то в одну сторону, то в другую.
- При гармонических колебаниях координата, проекция скорости и проекция ускорения точки изменяются с течением времени по гармоническому закону.
- Основным признаком колебательного процесса, зависящего от времени по гармоническому закону, является соотношение между проекцией ускорения и смещением: ax=-ω2xt.
Пружинный маятник
Пружинным маятником называется система, состоящая из пружины жесткостью k и тела массой m. В простейшей модели пружинного маятника рассматривают только упругую деформацию пружины и пренебрегают: 1) сопротивлением среды и трением скольжения; 2) размерами тела. т. е. тело считается материальной точкой, хотя чаще всего его изображают прямоугольником; 3) массой пружины.
- Горизонтальный пружинный маятник — маятник, в котором колебания тела на пружине происходят вдоль горизонтальной прямой.
- Вертикальный пружинный маятник — маятник, в котором колебания тела на пружине происходят вдоль вертикальной прямой.
Рассмотрим колебания горизонтального пружинного маятника. Пусть пружина прикреплена к вертикальной стене, а тело может скользить без трения по гладкому горизонтальному столу (рис. 207, а).
Если пружина не растянута, то на покоящееся тело действуют только сила тяжести  и сила реакции опоры
и сила реакции опоры , и по второму закону Ньютона:
, и по второму закону Ньютона:

Выведем тело из положения равновесия, растягивая при этом пружину, и отпустим его. Так как пружина растянута, то на тело действует сила упругости пружины  , и по второму закону Ньютона:
, и по второму закону Ньютона:

В системе координат, начало которой расположено под положением равновесия тела (рис. 207, б), запишем для проекций на ось Оу:
и ось Ох:
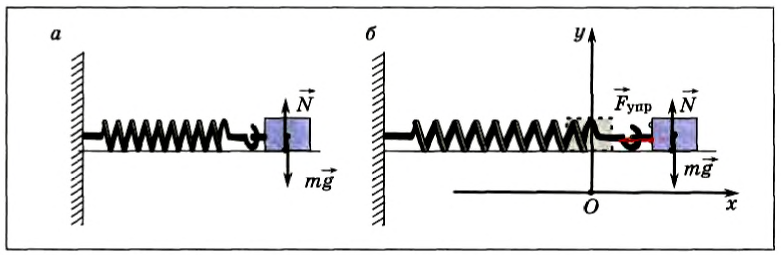
Рис. 207
Согласно закону Гука проекция силы упругости в выбранной системе отсчета:
где xt — абсолютное удлинение пружины, или координата тела в выбранной системе отсчета.
Выразим проекцию ускорения:
и сравним с соотношением, характеризующим гармонические колебания:
Сравнение позволяет считать, что

и циклическая частота колебаний равна:

а период колебаний тела на пружине:
Чтобы записать уравнение гармонических колебаний для координаты тела, необходимо знать амплитуду и фазу колебаний.
Амплитуда колебаний xmax равна максимальному значению координаты тела, или максимальному абсолютному удлинению пружины. Эта величина в соответствии с законом Гука: Fупрmax =-kxmax и третьим законом Ньютона:  определяется максимальной величиной деформирующей силы:
определяется максимальной величиной деформирующей силы:  под действием которой тело смещается из положения равновесия.
под действием которой тело смещается из положения равновесия.
Пусть в начальный момент времени координата тела максимальна, т. е. мы начинаем следить за его движением в момент начала движения тела к положению равновесия. Тогда уравнение для координаты может быть записано как:

с начальной фазой φ0 = 0.
Или по закону синуса:

с начальной фазой 
В соответствии с формулами, полученными при рассмотрении гармонических колебаний, можно записать уравнения для проекций скорости и ускорения тела:

где модули максимальных (амплитудных) значений скорости и ускорения соответственно равны:

Рассмотрим характеристики движения тела в некоторые моменты времени.
Через промежуток времени, равный  после начала движения тела к положению равновесия, координата тела, проекции скорости и ускорения равны:
после начала движения тела к положению равновесия, координата тела, проекции скорости и ускорения равны:


В этот момент тело проходит положение равновесия (рис. 208, а) с максимальной скоростью, а ускорение равно нулю, так как пружина не деформирована.
Через половину периода  координата тела, проекции скорости и ускорения равны:
координата тела, проекции скорости и ускорения равны:


В этот момент тело на мгновение останавливается, пружина максимально сжата, и, соответственно, ускорение максимально и направлено к положению равновесия (рис. 208, б).
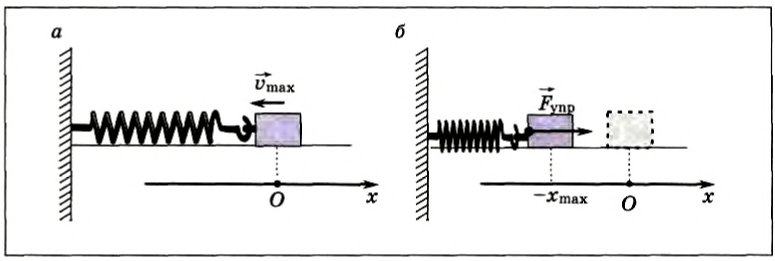
Рис. 208
Через промежуток времени, равный периоду, координата тела равна
:  и т. д.
и т. д.
В таком идеальном случае, без действия сил трения и сопротивления, тело на пружине должно колебаться бесконечно долго.
Колебания называются незатухающими, если их амплитуда постоянна, т. е. не зависит от времени. Следовательно, рассмотренные колебания пружинного маятника являются незатухающими.
Можно показать, что для вертикального пружинного маятника циклическая частота или период колебаний определяются теми же величинами k и m и равны:
Жесткость пружины и масса груза — характеристики данной колебательной системы, а колебания поддерживаются за счет силы упругости, которая является силой взаимодействия между телом и пружиной в колебательной системе.
Свободными, или собственными, называются колебания, происходящие только под действием сил взаимодействия в самой колебательной системе при отсутствии сил сопротивления движению.
Период или частота собственных (свободных) колебаний обусловлены только характеристиками колебательной системы, а амплитуда колебаний остается неизменной и определена причинами, которые вывели систему из положения равновесия.
Главные выводы:
- Пружинный маятник — модель колебательной системы, в которой рассматривают только упругую деформацию пружины и пренебрегают массой пружины и размерами тела.
- Колебания пружинного маятника являются гармоническими, форма записи уравнения колебаний (косинусоидальные или синусоидальные) выбирается в зависимости от начальных условий и удобства математической записи.
, амплитуда колебаний определяется причинами, которые вывели маятник из положения равновесия. - Период или частота колебаний пружинного маятника зависят только от жесткости пружины и массы тела:
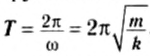 , амплитуда колебаний определяется причинами, которые вывели маятник из положения равновесия.
, амплитуда колебаний определяется причинами, которые вывели маятник из положения равновесия.Математический маятник
Рассмотрим колебания маленького стального шарика, подвешенного на длинной нерастяжимой нити. Отклоним нить с шариком на небольшой угол от вертикали и отпустим. Под действием силы тяжести и силы натяжения нити шарик начнет колебательное движение (рис. 209. а). Можно засечь время, например 5 полных колебаний, и определить период колебании.
Из-за сил трения о воздух и внутреннего трения в материале нити возле точки подвеса энергия, полученная шариком при выведении из положения равновесия, постепенно переходит во внутреннюю, и его амплитуда колебаний уменьшается. Измерим вновь время 5 полных колебаний и определим период при меньшей амплитуде. Период колебаний не изменился.
Исследуем, от чего зависит период колебаний. Подвесим на той же нити вместо стального шарика пластмассовый таких же размеров, но меньшей массы. Период колебаний остался прежним.
Если подвесить шарик на нити большей длины, то период колебаний увеличится.
Чтобы получить формулу для периода колебаний, необходимо, как всегда, для упрощения математических расчетов сначала охарактеризовать используемую модель колебательной системы.
Математическим маятником называется находящаяся в гравитационном поле материальная точка, подвешенная на невесомой и нерастяжимой нити.
Математический маятник — это модель малых реальных колебаний тела под действием силы тяготения при условии, что можно пренебречь: I) размерами подвешенного тела по сравнению с длиной нити; 2) сопротивлением движению тела; 3) массой нити; 4) деформацией нити.
Для того чтобы получить формулу для периода колебаний, проведем еще два опыта. Отклоним шарик на нити длиной l на небольшое расстояние от вертикальной линии OO1 и измерим это расстояние R (см. рис. 209, а). Отпустим шарик и определим период его колебаний Tk. Вновь отведем шарик на расстояние R от линии OOt и толкнем так, чтобы шарик начал двигаться по окружности радиуса R, а нить при его движении описывала коническую поверхность (рис. 209, б). Определим период вращения шарика Tв и сравним с периодом колебаний. Эти величины оказываются равными: Тк = Тв.
Рис. 209
Шарик движется по окружности с центростремительным ускорением под действием двух сил: силы тяжести  и силы натяжения нити
и силы натяжения нити  . По второму закону Ньютона:
. По второму закону Ньютона:  .
.
Спроецируем на оси координат и получим выражение для ускорения шарика:

При малых углах отклонения нити  .
.
C другой стороны, центростремительное ускорение равно:  . Используя эти уравнения, получим выражение для периода.
. Используя эти уравнения, получим выражение для периода.
Период колебаний математического маятника можно рассчитать по формуле:
При малых отклонениях от положения равновесия период колебаний математического маятника не зависит от амплитуды. Это свойство маятника называется изохронностью (изо — постоянный, хронос — время).
Свободные колебания математического маятника можно считать гармоническими только при малых углах отклонения нити от вертикали.
Формула для периода свободных (или собственных) колебаний математического маятника показывает, что, как и для пружинного маятника, период колебаний определяется только параметрами колебательной системы: длиной нити и ускорением свободного падения (характеризующим взаимодействие маятника с Землей) в месте расположения маятника.
Так как период колебаний маятника может быть определен и по формуле  , где N — число полных колебаний маятника за время t, то, используя обе формулы, можно вычислить ускорение свободного падения в данном месте Земли.
, где N — число полных колебаний маятника за время t, то, используя обе формулы, можно вычислить ускорение свободного падения в данном месте Земли.
Как мы уже обсуждали, ускорение свободного падения зависит от многих параметров, в том числе и от средней плотности залегающих под почвой пород.
В 30-е годы XX в. не существовало современных физических методов геологической разведки, и контуры знаменитого месторождения магнитного железняка в России «Курская магнитная аномалия» были определены с помощью прибора, основной частью которого был маятник. Там, где плотная железосодержащая порода была близко под почвой, ускорение свободного падения было больше, а период колебаний маятника меньше.
Полученная формула для периода колебаний математического маятника может быть использована для оценки периода колебаний так называемого физического маятника, т. е. колеблющегося тела, размерами которого нельзя пренебречь по сравнению с длиной подвеса. В этом случае используют понятие — приведенная длина Lnp, которая больше L — расстояния от точки подвеса до центра тяжести. Тогда период колебаний физического маятника Γφ можно оценить по формуле:
При использовании маятниковых часов необходимо учитывать зависимость ускорения свободного падения от массы Земли M и расстояния r до ее центра:
Следовательно, при перемещении таких часов высоко в горы, в глубокую шахту или на другую планету период маятниковых часов будет меняться, и они будут отставать или спешить по сравнению с их показаниями в месте изготовления.
Главные выводы
- Математический маятник — это тело малых размеров, подвешенное на длинной невесомой и нерастяжимой нити, совершающее колебания под действием постоянной силы тяготения.
- Колебания математического маятника являются гармоническими лишь при отклонении нити от вертикали на малые углы.
- Период колебаний математического маятника вычисляется по формуле:
Превращение энергии при механических колебаниях
Как мы уже обсуждали, в рассмотренных моделях гармонических колебаний пружинного и математического маятников предполагалось, что сопротивление движению отсутствует.
В этом случае должен выполняться закон сохранения и превращения механической энергии. Покажем выполнение закона сохранения энергии при гармонических колебаниях на примере горизонтального пружинного маятника.
Работа деформирующей силы при растяжении пружины была затрачена на потенциальную энергию упругой деформации:  . При движении к положению равновесия деформация пружины уменьшается, и при некоторой деформации хt (или координате тела) (рис. 210) потенциальная энергия упругой деформации равна:
. При движении к положению равновесия деформация пружины уменьшается, и при некоторой деформации хt (или координате тела) (рис. 210) потенциальная энергия упругой деформации равна: 
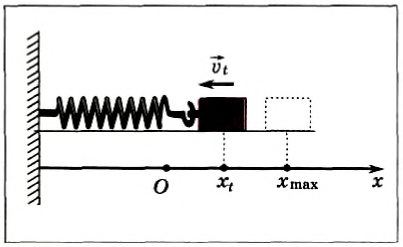
Рис. 210
Двигаясь ускоренно под действием силы упругости, тело приобрело скорость и соответственно кинетическую энергию:  , где m— масса тела, υx — скорость тела в момент, когда его координата xt.
, где m— масса тела, υx — скорость тела в момент, когда его координата xt.
Используя уравнения для координаты и проекции скорости: xt = xmaxcosωt, υx = -xmaxsinωt, и формулу для циклической частоты:  , найдем сумму кинетической энергии груза и потенциальной энергии в любой момент времени:
, найдем сумму кинетической энергии груза и потенциальной энергии в любой момент времени:


Таким образом, в любой момент времени механическая энергия системы, равная сумме кинетической энергии тела и упругой энергии пружины, остается постоянной и равной начальной максимальной потенциальной энергии.
Полная энергия колебаний может быть выражена и через максимальную кинетическую энергию:

Аналогично можно показать выполнение закона сохранения и превращения механической энергии при свободных колебаниях математического маятника.
В случае возбуждения колебаний при отклонении маятника из положения равновесия работа внешней силы идет на увеличение потенциальной энергии груза маятника. При подъеме на высоту H потенциальная энергия груза относительно положения равновесия (рис. 211):

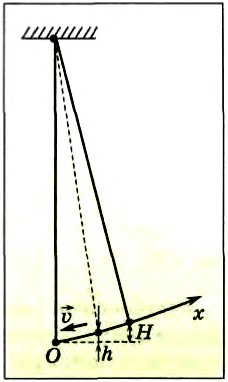
Рис. 211
При движении маятника к положению равновесия происходит увеличение кинетической энергии
груза за счет потенциальной энергии, и на высоте h полная энергия:
Следовательно, можно записать закон сохранения механической энергии для математического маятника:

Для реального маятника из-за трения о воздух и внутреннего трения в нити возле точки подвеса часть механической энергии за каждый период колебаний переходит во внутреннюю энергию теплового движения атомов и молекул Q.
В этом случае выполняется закон сохранения полной энергии:

и через промежуток времени, равный периоду, максимальное значение потенциальной энергии меньше начального:
Следовательно, в процессе колебательного движения амплитуда колебания уменьшается.
Затухающими называются колебания, амплитуда которых с течением времени уменьшается (рис. 212). Например, если толкнуть качели с сидящим на них человеком, то колебания этой системы будут затухающими.
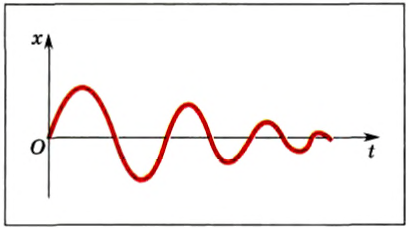
Рис. 212
В этом случае для сохранения амплитуды колебаний необходимо пополнять потери энергии. Например, поддерживать амплитуду колебаний качелей постоянной можно, периодически их подталкивая.
Вынужденными называются колебания, происходящие под действием внешней периодически изменяющейся силы.
Рассмотрим вынужденные колебания в следующем опыте. Подвесим пружинный маятник к стержню с изгибом (рис. 213). который можно вращать е помощью рукоятки. Отверстие, через которое проходит подвес маятника, позволяет ему двигаться только вверх или вниз. При вращении рукоятки с постоянной частотой на маятник будет с такой же частотой действовать сила со стороны стержня.
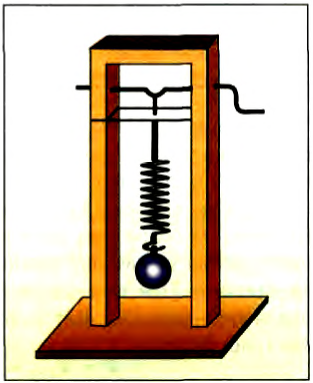
Рис. 213
У пружинного маятника есть собственная частота колебаний. Пусть частота вращения стержня не равна этой частоте. Тогда под действием периодически изменяющейся силы амплитуда колебаний груза сначала увеличивается (рис. 214), а через некоторое время устанавливаются колебания с постоянной амплитудой и периодом, равным периоду вынуждающей силы.
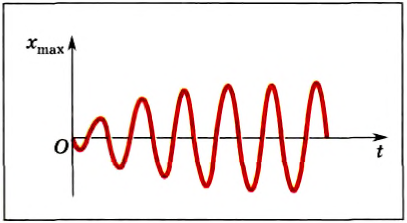
рис. 214
При установившихся колебаниях работа внешней силы равна потерям энергии в колебательной системе, а значение установившейся амплитуды определяется: 1) потерями энергии; 2) амплитудой действующей силы; 3) частотой или периодом внешней силы.
Если изменять частоту вращения стержня соответственно, частоту вынуждающей силы, можно зарегистрировать характерную завимостью амплитуды вынужденных колебаний от частоты (рис. 215), которая называется резонансной кривой. При частоте вынуждающей силы. приближающейся к собственной частоте колебаний маятника, амплитдных колебаний растет, а при больших частотах уменьшается.
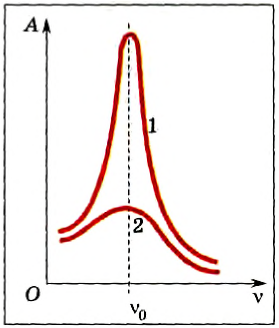
Рис. 215
Механическим резонансом называется резкое возрастание амплитуды возбужденных колебаний, когда частота вынуждающей силы близка к частоте собственных колебаний системы.
Представленные на рисунке 215 резонансные кривые получены при разных силах сопротивления движению. Резонансная кривая 1 получена при силах трения, а резонансная кривая 2 — при наличии больших сил сопративления движению.
Следовательно, резкое возрастание амплитуды вынужденных колебаний в резонансе наблюдается лишь при наличии малых сил сопротивления движению
Например, если толкать качели «в такт» их движению, то можно их «растягивать» до все большей амплитуды. Возрастание амплитуды колебаний происходит до тех пор, пока энергия, поступающая в колебательную систему за работы периодической силы, больше энергии потерь.
Явление резонанса имеет огромное практическое значение, так как используется для усиления различных колебаний в технике.
Вынужденные колебания используют при работе виброустройств для уплотненения сыпучего основания под фундаменты и дороги, уплотнения бетона при заливке фундаментов. Вибраторы применяются для вибрационного забивания свай, труб, при виброукладке бетона, сортировке сыпучих материалов.
Механические волны
Реальные колебательные системы практически всегда расположены в какой-либо среде. Поэтому колебательная система может отдавать энергию частицам среды, непосредственно прилегающим к ней, вызывая их вынужденные колебания. Например, движение качелей происходит в воздухе, и, стоя возле мы ощущаем движение воздуха, как бы ветерок дует на нас при прохожими качелей то с одной, то с другой стороны.
Как мы уже обсуждали, между молекулами вещества существуют силы взаимодействия, которые определяют его упругие свойства. Если какие-то частицы выводятся из положения равновесия, то силы взаимодействия со стороны соседних частиц препятствуют этому и одновременно смещают сами соседние частицы. Вследствие взаимодействия между частицами колебательное движение передается от одной частицы к другой, и колебательный процесс распространяется в среде.
Механической волной называется процесс распространения колебаний в фугой среде.
Как модель возникновения и распространения механической волны можно рассмотреть движение двух поплавков на поверхности воды. Подергаем леску один из них так. чтобы поплавок начал колебаться вверх-вниз, месте с поплавком смещаются соприкасающиеся с ним частицы воды, которые вовлекают в движение ближайшие к ним другие частицы, и от поплавка по всем направлениям распространяются волны. Эти волны вовлекают в колебательное движение второй поплавок, и от него появляются такие же волны.
Важно отметить, что оба поплавка только колеблются возле положения равновесия, а волны распространяются от них во всех направлениях.
Источником колебаний или вибратором называется колеблющееся тело, возбуждающее волновое движение частиц среды.
Рассмотрим модель еще более простой механической волны, которая распространяется только в одном направлении. Для этого возьмем резиновый шнур с нанизанными на него бусинами, один конец закрепим, а второй конец будем периодически двигать вверх-вниз возле положения равновесия (рис. 217).
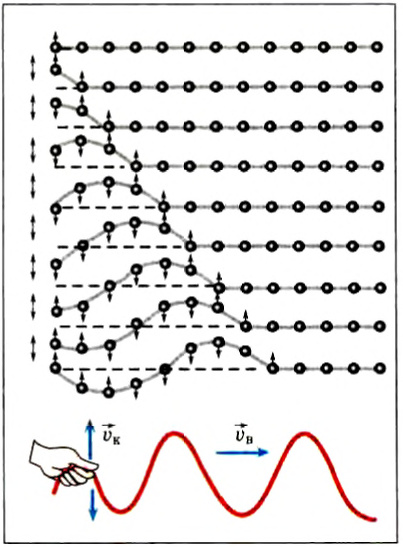
Рис. 217
В качестве источника колебаний выступает наша рука, и пусть ее колебания, а следовательно, колебания ближайшей от нее бусины происходят вдоль оси Oy по закону:
где А — амплитуда колебания бусины, которая подвержена нашим воздействиям, фаза колебания, T — период колебания.
На рисунке показаны положения бусин на шнуре через каждую восьмую часть периода колебаний. В момент  фаза колебания первой бусины равна
фаза колебания первой бусины равна  , а фазы колебаний всех остальных бусин, колеблющихся возле своего положения равновесия на оси Ох, меньше .
, а фазы колебаний всех остальных бусин, колеблющихся возле своего положения равновесия на оси Ох, меньше .
В этом случае говорят, что колебания других бусин отстают по фазе от колебаний первой тем больше, чем дальше они расположены от источника колебаний.
В момент времени  смешение первой бусины будет таким же, как и в момент t1 т. е. смещение каждой бусины от положения равновесия повторяется с периодом, равным периоду вибратора.
смешение первой бусины будет таким же, как и в момент t1 т. е. смещение каждой бусины от положения равновесия повторяется с периодом, равным периоду вибратора.
Следовательно, при распространении волны: 1) смещение каждой точки шнура от положения равновесия происходит с течением времени периодически: 2) смещения всех точек шнура в каждый момент времени периодически изменяются от точки к точке, т. е. являются периодической функцией координат.
Иногда говорят, что при распространении волны происходит перемещение фазы колебания от точки к точке с определенной скоростью.
- Фазовой скоростью называется скорость распространения какой-либо фазы от одной точки среды к другой.
- Бегущей волной называется распространение колебательного движения в среде с определенной скоростью υ.
Пусть волна вдоль шнура распространилась до точки с координатой х. Бусина в этой точке будет иметь такую же фазу колебаний, как и первая, но не более поздний момент времени распространения волны, т. е. отставать  . Следовательно, уравнение колебаний бусины вдоль оси Oy около положения ее равновесия, имеющего координату х, будет повторять уравнение колебаний первой бусины, но с соответствующим отставанием по фазе:
. Следовательно, уравнение колебаний бусины вдоль оси Oy около положения ее равновесия, имеющего координату х, будет повторять уравнение колебаний первой бусины, но с соответствующим отставанием по фазе:
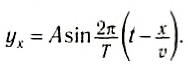
Это уравнение называют уравнением бегущей волны вдоль оси Ох.
Важно понимать, что при распространении бегущей механической волны частицы среды не перемещаются вместе с волной, а только совершают колебания около своих положений устойчивого равновесия. Поэтому бегущая волна не переносит вещество, а переносит энергию колебательного движения.
Словосочетание «колебания частиц совпадают по фазе» используют для ех частиц, участвующих в волновом процессе, которые в данный момент имеют одинаковые смещения от положения равновесия и одинаковые проекции скорости. А фазы колебаний таких частиц отличаются на четное число, умноженное на π: nπ, где n — четное число.
В зависимости от направления колебаний частиц среды относительно направления распространения волны различают поперечные и продольные волны.
Поперечной волной называется распространение колебательного процесса ɪ среде, при котором частицы среды колеблются перпендикулярно направлению распространения волны.
Рассмотренный пример колебаний бусин на шнуре является моделью возникновения и распространения поперечной волны.
Условием распространения поперечных волн в среде является возникновение при деформации сдвига упругих возвращающих сил. Поэтому поперечные волны могут распространяться в твердых веществах, вдоль упругих шнуров, труп и т. д., на поверхности жидкостей.
Продольной волной называется распространение колебательного процесса в среде, при котором частицы среды колеблются вдоль направления распространения волны. Продольные волны возникают при деформации сжатия или растяжения.
Примером продольных волн может служить распространение колебательного процесса вдоль ряда подвешенных шариков, которые скреплены друг с другом одинаковыми пружинками (рис. 218, а). Если вывести из положения равновесия один из шариков и отпустить, то в горизонтальном направлении за счет взаимодействия шариков и пружинок начнет распространяться продольная волна, представляющая собой сгущения и разрежения витков пружин (рис. 218, б). При этом каждый шарик колеблется вдоль направления распространения волны.
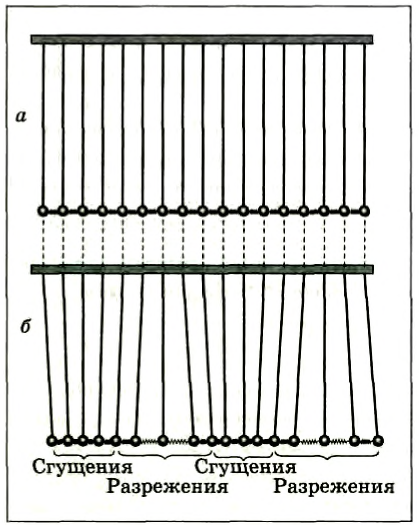
Рис. 218
Продольные волны могут, например, возникать, если в длинной трубке с воздухом возле одного из концов поршень совершает колебательное движение (рис. 219). В этом случае в воздухе будет распространяться упругая волна, представляющая собой чередование сгущений и разрежений среды, которое будет характеризоваться периодическим изменением плотности или давления в среде. Мембрана микрофона, установленного возле другого конца трубки, начнет колебаться под воздействием воздуха, и стрелка присоединенного к микрофону гальванометра также начнет колебаться.
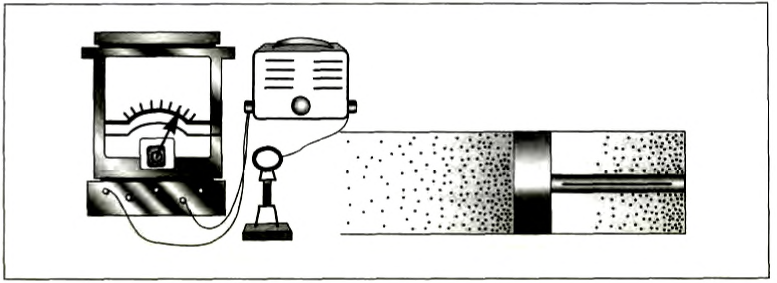
Рис. 219
Продольные волны могут возникать и распространяться в веществе, находящемся в любом состоянии: твердом, жидком и газообразном. Поперечные волны возникают и распространяются только в твердых веществах.
Необходимо отметить, что распространение механических волн определяется передачей энергии колебательного движения от одной частицы к другой. Но частицы среды лишь колеблются возле положений равновесия, а распространяющаяся волна переносит энергию в пространстве. Энергия, переносимая волной, равна сумме кинетических энергий колеблющихся частиц и потенциальной энергии упругой деформации среды.
Главные выводы:
- Механическая волна — это процесс распространения колебаний от одной частицы среды к другой. Период колебаний частиц среды, т, е. период волны, определяется источником колебаний.
- При распространении механической волны частицы среды не перемещаются вместе с волной, а только совершают колебания около своих положений устойчивого равновесия. Поэтому бегущая волна не переносит вещество, а переносит энергию колебательного движения.
- В зависимости от направления колебания частиц среды относительно направления распространения волны различают поперечные и продольные волны.
Скорость распространения волны
Механическая волна — это процесс распространения колебательного движения в среде от частицы к частице, обусловленный взаимодействием между ними. Следовательно, скорость распространения механических волн в среде должна зависеть от сил взаимодействия между частицами среды.
При рассмотрении механических деформаций мы обсуждали, что силы взаимодействия в веществе зависят от свойств молекул или атомов и расстояний, на которых они находятся.
Опыты по изучению механических волн показывают, что скорость их распространения в однородной среде тем больше, чем меньше плотность вещества и чем более упругим оно является.
При изучении простейших упругих деформаций растяжения и сжатия мы познакомились с одной из характеристик упругих свойств вещества — продольным модулем упругости, или модулем Юнга Е.
Установлено, что при распространении продольных волн вдоль стержня их скорость определяется по формуле:  , где υ∣∣ — скорость продольной волны, E — модуль Юнга для вещества стержня, р — плотность вещества стержня.
, где υ∣∣ — скорость продольной волны, E — модуль Юнга для вещества стержня, р — плотность вещества стержня.
Подобные формулы установлены для скорости распространения продольных и поперечных волн и для более сложных случаев.
Скорость механических волн в среде определяется физическими характеристиками среды: упругими свойствами и плотностью.
Различные виды упругой деформации характеризуются количественно отличающимися коэффициентами. Поэтому, например, в твердых телах продольные волны распространяются быстрее поперечных, и скорость продольных волн в железе  , а поперечных—
, а поперечных— 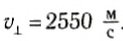
Различия в скорости распространения продольных и поперечных волн в веществе используются для изучения особенностей его строения. Например, в геофизике изучается распространение продольных и поперечных воли в земной коре, что позволяет получать информацию о ее строении и определять расположение эпицентров землетрясений.
Для характеристики волн применяют понятие длина волны, которое можно ввести двумя способами (рис. 222)
- длиной волны λ называется расстояние, на которое распространяется колебательный процесс в среде за время, равное периоду колебаний ее частиц;
- длиной волны λ называется расстояние между двумя ближайшими точками бегущей волны, которые колеблются в одинаковой фазе.
В том, что эти два варианта определения длины волны равноправны, легко убедиться, проанализировав развитие волнового процесса на рисунке 222.
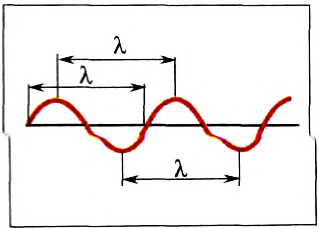
Рис. 222
Пусть известны период T и скорость волны υ. Тогда согласно первому варианту определения ,глины волны:
λ = υT.
Как мы уже обсуждали, период волны определяется источником колебаний, а скорость обусловлена свойствами среды, поэтому при распространении колебательного процесса из одной среды в другую изменяются скорость и длина волны, а частота и период не изменяются.
На границе раздела двух сред может происходить отражение и преломление механических волн, подобное отражению и преломлению света, которое вы рассматривали в оптике.
При этом законы отражения и преломления механических волн аналогичны законам отражения и преломления света.
На практике наблюдаются два типичных случая отражения, один из которых называют отражением с потерей полуволны, а второй — отражением бел потери полуволны.
В случае отражения с потерей полуволны (рис. 223), если волна до отражения двигалась гребнем вперед, то после отражения волна будет распространяться впадиной вперед (и наоборот), т. е. при таком отражении фаза волны изменяется на противоположную. Такое отражение наблюдается на границе двух сред, если скорость распространения волны во второй среде меньше, чем в первой.
Рис. 223
Если во второй среде скорость распространения волны больше, чем в первой, то от границы этих сред происходит отражение без потери полуволны, т. е. если волна до отражения двигалась гребнем вперед, то и после отражения она будет распространяться гребнем вперед.
Рассмотрим простейшую модель одного из интересных случаев распространения и отражения волн на примере нити, один конец которой привязан к молоточку звонка, а к другому концу через блок подвешена маленькая гирька (рис. 224).
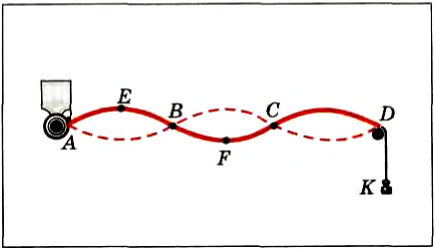
Рис, 224
Частицы нити передают друг другу колебания от молоточка, и волна распространяется до блока, вызывая вынужденные колебания груза. Эти колебания порождают отраженную волну той же частоты. Таким образом, каждая точка нити участвует в двух колебаниях, которые приходят с разных сторон.
Если изменять расстояние от молоточка до блока, то можно наблюдать, как при некоторых расстояниях возникают так называемые стоячие волны.
Стоячие волны возникают только тогда, когда на расстоянии от источника до препятствия, отражающего волны, укладывается целое число четвертей волны.
Название «стоячие волны» возникло потому, что при распространении таких волн нет перемещения фазы между колеблющимися точками, а некоторые из точек стоячей волны совсем не колеблются.
Узлами называются те точки стоячей волны, которые не колеблются. Например, точки А, В, C па рисунке 224. Расстояние между соседними узлами составляет половину длины стоячей волны.
Пучностями называются точки стоячей волны, амплитуды которых максимальны. Например, точки Е, F на рисунке 224.
Стоячие волны можно наблюдать на натянутых горизонтально канатах, струнах. Причем в зависимости от точки воздействия на струну одной и той же длины в ней одновременно могут возникать одна или несколько кратных ей стоячих волн.
В окружающем мире мы часто наблюдаем возникновение и исчезновение (затухание) волн. Например, на спокойной поверхности воды в пруду волны от брошенного камешка довольно быстро исчезают. Или на поверхности лужи при резком порыве ветра вдруг возникает «рябь» — много мелких волн, которые могут исчезнуть так же быстро.
Затуханием волны называется уменьшение ее амплитуды в процессе распространения. Колебательному движению частиц среды препятствуют силы сопротивления. В результате этого энергия колебательного движения частиц переходит во внутреннюю энергию вещества, и волны затухают.
Главные выводы:
- Скорость механических волн зависит от физических характеристик среды: ее упругих свойств и плотности.
- Длиной волны называется расстояние, на которое распространяется колебательный процесс в однородной среде за время, равное периоду колебаний частиц волны (или расстояние между двумя точками волны, колеблющимися в одинаковой фазе).
- При переходе в другую среду период и частота волны остаются постоянными, а скорость распространения волны изменяется, поэтому изменяется и длина волны.
- При различии в скоростях распространения волн в двух средах на их границе происходит отражение и преломление волны.
- Реальное колебательное движение частиц в любой среде происходит при наличии сил сопротивления, и поэтому механические волны в любой реальной среде затухают.
Звуковые волны
Окружающий мир наполнен огромным количеством звуков, которые издают люди, птицы и другие животные, машины и т. д. Что же такое звук и как он возникает?
Проведем опыт с металлической тарелкой из ударных инструментов оркестра (рис. 225). Ударим по краю тарелки, когда она находится на стойке и когда за лежит на мягком кресле.
В обоих случаях мы услышим звуки, но они будут отличаться. Почему звуки разные?

Рис. 225
Тарелка на стойке после удара достаточно долго колеблется, лежащая на кресле — практически не колеблется.
Различные опыты показывают, что звук возникает только от колеблющихся тел, которые называют источниками звука. Каким же образом звук двигает уха человека?
На этот вопрос ответил в 1660 г. английский ученый Р. Бойль. Он изучал звучание колеблющихся тел, помещенных под колокол воздушного насоса (Рис. 226). При наличии под колоколом воздуха звук от звонка хорошо слышны. При откачивании из под колокола воздуха громкость звука уменьшается, и наконец звук совсем исчезает. Если впустить воздух под колокол, то вновь слышен громкий звук. Следовательно, для распространения звука от колеблющегося тела необходима среда.
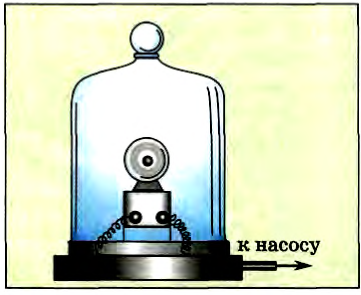
рис. 226
Кроме того, каждый знает, что звуки слышны в воде, через стекло, степы и т. д.
Дело в том, что в окружающем мире: в воздухе, воде, почве, зданиях, мостах. рельсах, автомобилях, мебели и т. д. — непрерывно распространяются разнообразные колебания от различных источников колебаний.
Механические волны в интервале частот приблизительно от 20 Гц до 20 000 Гц слуховая система человека воспринимает как звуковые колебания, а колебания других частот ощущаются нами в основном как вибрация, толчки, удары и т. п.
Акустикой называется раздел физики, изучающий возникновение и распространение звуковых волн.
Большинство звуковых волн достигают уха человека по воздуху, а в газах, как мы обсуждали, распространяются только продольные волны, представляющие собой области сгущения или разрежения молекул, т. е. периодические изменения плотности и давления.
Именно периодические изменения давления воздуха вызывают вынужденные колебания ушной барабанной перепонки, которые сложным образом преобразуются в сигналы, распространяющиеся по нервам в кору головного мозга. Барабанная перепонка и остальная сложная система, определяющая слух человека, способны преобразовывать в нервные импульсы лишь определенный диапазон частот механических колебаний, в среднем от 20 Гц до 20 000 Гц. Поэтому ввели следующие определения.
Звуком называется волновой процесс, распространяющийся в твердых телах в виде продольных и поперечных волн, а в жидкостях и газах в виде продольных волн с частотой в пределах 20—20 000 Гц.
Инфразвуком называются волны с частотой меньше 20 Гц, а ультразвуком — с частотой больше 20 000 Гц. В последнее время при изучении вещества интенсивно используется гиперзвук с частотой порядка 109 Гц.
Частота и период звуковой волны определяются источником звука, т. е. акустическим или звуковым вибратором.
Скорость звуковых волн, как и всех механических волн, зависит от упругих свойств среды и ее плотности. В воздухе, в зависимости от его температуры и влажности, скорость звука 330—340  ; в воде, в зависимости от температуры и примесей. — 1480—1530
; в воде, в зависимости от температуры и примесей. — 1480—1530  ; в железе — около 5850
; в железе — около 5850  .
.
Длину звуковой волны можно вычислить, как и для всех механических волн, по формуле:

Для сравнения звуков используют различные слова, например «высокий» ли «низкий», «металлический» или «музыкальный», при сравнении голосов звонят «бас» или «тенор» и т. д.
Измерения показывают, что звуки, воспринимаемые человеком как «тонне», «высокие», имеют большую частоту, чем звуки «низкие». При этом, как правило, каждое звучащее тело создает свой набор звуковых волн нескольких частот, в результате чего звуки от разных колеблющихся тел отличаются.
Музыкальным тоном называется звуковая волна одной частоты, подчиняющаяся гармоническому закону.
Для настройки музыкальных инструментов используются камертоны рис. 227), каждый из которых сделан так, что создает, практически, звук плюй частоты, или один музыкальный топ.

Рис. 227
Для тех, кто занимается музыкой или пением, интересно будет знать, что он «ля» первой октавы (рис. 228) соответствует частоте 440 Гц, тон «ля» второй октавы — частоте 880 Гц и т. д.
Голос, способный издавать звуки низкой частоты, называется, басом. «Нижний» рекорд для баса — звук при частоте 44 Гц. Самая высокая нота, ιpoπeτaπ певицей, соответствовала частоте 2300 Гц.

Рис. 228
Так как большинство звучащих тел создают целый набор звуковых частот, то для описания создаваемых ими звуков принято использовать целый ряд терминов.
Основным тоном называется звук наименьшей частоты, издаваемый звучащим телом.
Обертонами называются звуки более высоких частот, чем основной тон, их частоты являются кратными частоте основного тона.
Тембр сложного звука определяется количеством тонов и их частотами.
Тембр определяет неповторимость звуков человеческих голосов и различных музыкальных инструментов.
В струнах музыкальных инструментов (рис. 229) возникают стоячие волны. Частота стоячей волны зависит от точки воздействия на струну. Поэтому в руках умелого гитариста одна струна может петь, почти как целый оркестр.
Рис. 229
Основной тон голоса человека определяется так называемыми голосовыми связками: чем они тоньше и короче, тем больше частота колебаний и выше голос. Но неповторимость и красоту голоса создают обертоны, которые возникают при колебаниях не только связок, но и губ, языка и т. д.
Чем отличается музыкальный звук от шума?
Шумом называется такой сложный звук, в котором нельзя выделить отдельные гармонические тоны.
Поэтому волчий вой и комариный писк — звуки музыкальные, а барабанный бой и стук кастаньет являются шумом.
А чем отличаются «громкие» и «тихие» звуки?
Громкость звука зависит от энергии колебаний звуковой волны и особенностей слухового аппарата человека.
Самые тихие звуки, воспринимаемые человеком, вызывают колебания барабанной перепонки с энергией порядка 10-16Дж. Самые громкие звуки (еще без болевых ощущений), например недалеко от взлетающего реактивного самолета, соответствуют энергии колебаний порядка 10-4Дж.
Кажется, что энергия 10-4 Дж = 0,1 мДж очень маленькая, но для маленькой и тонкой барабанной перепонки превышение этой энергии может привести к ее разрыву.
Единица громкости называется белом (Б) в честь физика Генриха Бела. На практике чаще используют децибел: 1 дБ = 0,1 Б. На рисунке 230 представлена диаграмма громкости звуков от различных источников. Тиканье часов или шепот на расстоянии I м соответствуют 10 дБ, а звуковая волна громкостью порядка 130 дБ вызывает ощущение боли.
Объективной физической характеристикой звуковой волны, определяющей ее громкость, является интенсивность.
Интенсивностью звука I называется физическая величина, равная энергии, переносимой звуковой волной за единицу времени через единицу площади поверхности, расположенной перпендикулярно к направлению распространения волны.
Интенсивность определяется по формуле:

где W — энергия звуковой волны, переносимая через поверхность площадью S в течение времени t. Для интенсивности нет специальной единицы измерения, и она измеряется в ваттах на квадратный метр ( ).
).
Точечным источником звука называется колебательная система, размеры которой много меньше длины создаваемой ею звуковой волны.
Например, при частоте звука 500 Гц и скорости в воздухе 340  длина звуковой волны λ = 0,68 м = 68 см, и маленький колокольчик можно считать точечным источником.
длина звуковой волны λ = 0,68 м = 68 см, и маленький колокольчик можно считать точечным источником.
В этом случае волны распространяются как бы из точки и будут сферическими по форме. На расстоянии г от источника площадь сферической поверхности S = 4πr2 и
где P — мощность источника, т. е. энергия звуковых волн, создаваемая нм в одну секунду.
Если мощность источника постоянна и потерями энергии колебательного движения можно пренебречь, то интенсивность сферической звуковой волны убывает обратно пропорционально квадрату расстояния до источника. При увеличении расстояния в 2 раза интенсивность звука уменьшается в 4 раза.
Как мы уже обсуждали, слуховой аппарат человека и обрабатывающие звуковую информацию системы коры головного мозга способны распознавать лишь звуки в определенных интервалах громкости и частоты.
Под акустическим загрязнением понимают распространение в окружающем человека пространстве очень большого количества шумовых звуков или звуков большой громкости.
При акустическом загрязнении человек не может правильно воспринимать информацию, некоторые люди ощущают боль, может повышаться артериальное давление и т. п.
Например, если в классе звучат два голоса: учитель задает вопросы, а ученик отвечает, то слуховая система всех остальных учеников способна воспринимать, а мозг способен обрабатывать и запоминать информацию, переносимую звуковыми волнами от говорящих. После звонка, на перемене, начинают говорить одновременно практически все находящиеся в классе ученики. В этих условиях услышать, что говорит даже стоящий рядом человек, очень трудно.
В современном городе уровень уличного шума может достигать 80—90 дБ, и это негативно влияет на работу слухового аппарата и мозга человека. Еще больший уровень шума соответствует концерту рок-музыкантов. Поэтому с течением лет чувствительность их слуха снижается, они становятся «тугоухими», т. е. плохо слышат и воспринимают звуки и речь нормальной громкости.
На основании исследований установлены санитарные нормы, согласно которым безопасный уровень громкости звуков для человека не должен превышать 30—40 дБ.
Главные выводы:
- Звуком называется волновой процесс, распространяющийся в твердых телах в виде продольных и поперечных волн, а в жидкостях и газах в виде продольных волн с частотой в пределах от 20 Гц до 20 000 Гц.
- Скорость звуковых волн зависит от упругих свойств и плотности вещества, в которых они распространяются.
- Музыкальные звуки представляют собой гармонические изменяющия звуковые волны.
- При акустическом загрязнении окружающей человека среды может жаться чувствительность его слуховой системы и могут возникать болевые ощущения.
Звуковые явления
Так как скорость звука зависит от упругих свойств среды и ее плотности, то при переходе из одной среды в другую скорость звука скачком изменяется. Поэтому для звуковых волн на границе двух сред могут наблюдаться явления отражения и преломления.
Волна, распространяющаяся из первой среды, вызывает вынужденные колебания частиц второй среды. Колебания этих частиц являются источником новых звуковых волн, которые распространяются не только во второй среде, но и в первой. Так возникают отраженные и преломленные звуковые волны.
Отражение волн можно рассмотреть на следующем примере. Капнем из пипетки маленькую каплю воды в прямоугольную ванночку с водой. От места падения капли начинает распространяться круговая волна, от края ванночки волна отражается и движется в обратном направлении (рис. 231).
Рис. 232
Эхом называется отраженная звуковая волна, возвратившаяся к источнику звука. В окружающем мире эхо наблюдается при отражении от скал, стен зданий и т. д. (рис. 232). При этом вогнутые арки зданий и каменных мостов отражают звуковые волны лучше всего.

Рис. 232
В закрытом большом помещении, например в театре, может происходить многократное отражение звуковых волн от стен и потолка, поэтому в момент прекращения действия источника звук не сразу исчезает.
Реверберацией (послезвучанием) называется /величение продолжительности звука из-за его отражения от окружающих предметов. Реверберация зависит как от объема помещения, так и от его формы, материала потолка, стен, пола, мебели.
Время реверберации является важнейшей характеристикой тех больших помещений, в которых выступают актеры, ораторы, музыканты, и его следует учитывать при их проектировании. Часто говорят, что в помещении «хорошая акустика», если голос человека без микрофона со сцены можно достаточно хорошо услышать даже на большом удалении от нее.
Если такое помещение заполнено людьми, то время реверберации порядка 2 с, а если помещение пустое, то время реверберации примерно в 2 раза больше.
Эхо может быть использовано для звуколокации, т. е. оценки расстояний до отражающих звуковые волны предметов. Например, можно измерить промежуток времени между моментами испускания звука и моментом его возвращения к источнику после отражения. Пройденный звуком путь s туда и назад одинаков, тогда измеренный промежуток времени:

где  — скорость звука. В результате можно рассчитать расстояние до места отражения звуковой волны:
— скорость звука. В результате можно рассчитать расстояние до места отражения звуковой волны:
На практике для звуколокации (эхолокации) лучше использовать неслышимые человеком ультразвуки. Это обусловлено тем, что ультразвуковые волны большой мощности можно получать направленными, т. е. в виде узкого пучка волн. Это позволяет не только оценить расстояние, но и определить направление на отражающий звук объект.
Например, для определения глубины водоемов (рис. 233), поиска косяков рыбы и т. п. используются эхолоты — приборы, излучающие ультразвуковые волны и принимающие их после отражения. В живой природе дельфины и летучие мыши используют ультразвуки для ориентации в пространстве и при ловле добычи.

Рис. 233
Звуколокаторы позволяют находить различные повреждения в изделиях (полости, трещины и т. д).
Ультразвуковая диагностика (УЗИ) (рис. 234) используется в медицине для обнаружения опухолей, заболеваний внутренних органов и т. и.
Если частота звуковой волны совпадает с собственной частотой колебаний какой-либо колебательной системы, то наблюдается акустический резонанс. Например, обычный камертон издает достаточно тихий звук, и поэтому его устанавливают на деревянном ящике (см. рис. 227) с собственной частотой колебаний, равной частоте камертона. Благодаря резонансу стенки ящика колеблются с большой амплитудой, и звук становится гораздо громче, поэтому ящик называют резонатором.
Резонаторами являются корпуса (деки) большинства музыкальных инструментов (рис. 235), а также полости рта и носа человека. В духовых инструментах акустическими резонаторами являются трубы, а явление резонанса наблюдается для колебаний воздуха, который их заполняет.

Рис. 235
В последнее время большое значение приобрело изучение и использование инфразвуков: v < 20 Гц. Мощные инфразвуковые волны в земной коре могут возникать при землетрясениях, извержениях вулканов и взрывах различной природы. Кроме того, инфразвуки возникают при работе мощных двигателей, выстрелах из орудий, мощных потоках воздуха. Знание особенностей возникновения и распространения инфразвуков позволяет контролировать состояние земной коры, тестировать работу двигателей и т. п.
Главные выводы:
- При прохождении границы двух различных сред наблюдается отражение и преломление звуковых волн.
- Эхом называется отраженная звуковая волна, возвратившаяся к источнику возникновения звука.
- Отражение звуковых волн используется для определения расстояний до различных объектов, обнаружения дефектов в различных деталях, диагностики в медицине.
Механические колебания
Колебательное движение – одно из наиболее распространенных движений в природе. Изучение колебаний – это мощный инструмент познания микромира и космических процессов. К числу самых распространенных механических движений в природе относятся повторяющиеся движения, примерами которых являются вращательные движения Земли вокруг своей оси и вокруг Солнца, вращение стрелок часов, функциональная активность живых организмов.
Изучив подраздел, вы сможете: исследовать гармонические колебания  экспериментально, аналитически и графически.
экспериментально, аналитически и графически.
Уравнения и графики гармонических колебаний
Тело совершает свободные гармонические колебания в том случае, когда при его смещении от положения равновесия возникает сила, пропорциональная смещению и направленная к положению равновесия.
Положением равновесия называют положение тела, в котором равнодействующая всех сил, приложенных к телу равна нулю.
На тело пружинного маятника, выведенного из состояния равновесия, действует сила упругости, которая удовлетворяет условиям возникновения гармонических колебаний (рис. 1):

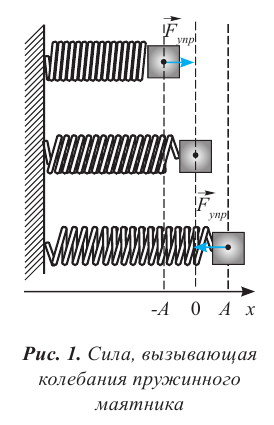
Вспомните формулы:
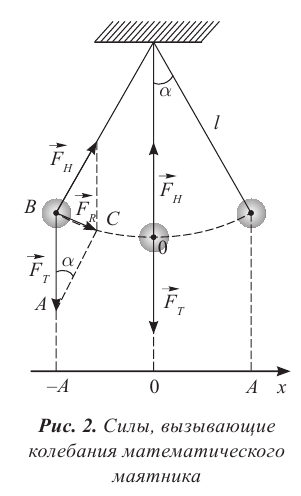
Законы гармонических колебаний
В пружинном и математическом маятниках могут совершаться свободные гармонические колебания, которые происходят по закону косинуса или синуса.
Без учета сил трения и сопротивления законы гармонических колебаний примут вид:

где A − амплитудное значение смещения,  − собственная циклическая частота. Закон движения (3) используют, если тело начинает свое движение из положения максимального отклонения
− собственная циклическая частота. Закон движения (3) используют, если тело начинает свое движение из положения максимального отклонения  Если тело начинает движение из положения равновесия х = 0, применяют закон движения (4).
Если тело начинает движение из положения равновесия х = 0, применяют закон движения (4).
Фаза колебаний. Связь фазы гармонических колебаний с периодом
Аргумент функции косинуса или синуса  в законах движения (3) и (4) называют фазой колебаний:
в законах движения (3) и (4) называют фазой колебаний:

Единица измерения фазы – радиан, 
Если колебание системы наблюдают с произвольного момента времени, то начальная фаза колебаний отличается от нуля. В этом случае фазу колебаний определяют по формуле:

где  − начальная фаза колебаний. При t = 0 фаза колебаний равна начальной:
− начальная фаза колебаний. При t = 0 фаза колебаний равна начальной: 
Учитывая связь собственной циклической частоты с периодом колебаний  из формулы (5) получим:
из формулы (5) получим:

Фаза колебаний — это угловая мера времени, выраженная в долях периода и характеризующая колебание в данный момент времени.
Возьмите на заметку
В общем случае законы гармонических колебаний имеют вид:
 , где
, где  – начальная фаза,
– начальная фаза,  – собственная циклическая частота.
– собственная циклическая частота.
Возьмите на заметку:
Собственная частота колебаний, циклическая частота и период системы зависят, от величин, характеризующих ее: массы груза m и жесткости пружины k – для пружинного маятника, длины нити  и ускорении свободного падения – для математического маятника.
и ускорении свободного падения – для математического маятника.
Собственная частота колебаний не зависит от амплитуды колебаний.
Уравнения гармонических колебаний
При ускоренном движении тела применим второй закон Ньютона:

С учетом формул расчета сил, приводящих маятники в движение (1) и (2), второй закон Ньютона для пружинного маятника примет вид:

для математического маятника:

Нам известно, что скорость тела, движущегося вдоль одной прямой, – это быстрота изменения координаты тела:  а ускорение – быстрота изменения скорости тела:
а ускорение – быстрота изменения скорости тела:  тогда при малых значениях
тогда при малых значениях  скорость можно принять за первую производную от координаты тела
скорость можно принять за первую производную от координаты тела  , а ускорение за первую производную от его скорости:
, а ускорение за первую производную от его скорости:  . Следовательно, ускорение является второй производной координаты тела:
. Следовательно, ускорение является второй производной координаты тела:

Формулы (9) и (10) с учетом (11) примут вид:
Запишем уравнения (12) и (13) в виде:

Полученные выражения (12), (13) и (14) называют уравнениями колеблющегося тела под действием сил упругости и тяжести.
Скорость и ускорение при колебательном движении
Формулы расчета ускорения и скорости легко получить из законов движения:
 )
)
где  – амплитудное значение скорости.
– амплитудное значение скорости.
где  – амплитудное значение ускорения.
– амплитудное значение ускорения.
Графики гармонических колебаний
Приняв значение начальной фазы равным нулю  построим графики колебаний
построим графики колебаний  в пределах одного периода, используя полученные зависимости (3, 15, 18).
в пределах одного периода, используя полученные зависимости (3, 15, 18).
Из рисунка 3 видно, что колебания величин происходят со смещением по фазе. Колебания скорости опережают колебания координаты на  Колебания ускорения происходят в противофазе с колебаниями координаты тела.
Колебания ускорения происходят в противофазе с колебаниями координаты тела.
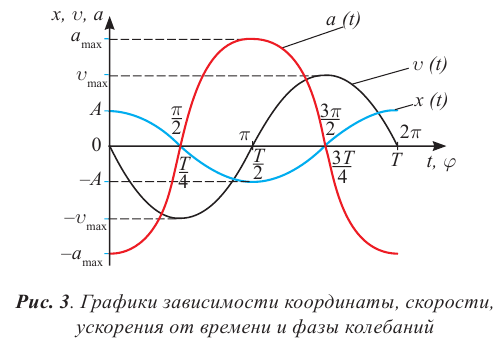
Разность фаз гармонических колебаний одной и той же частоты, выраженных через одну тригонометрическую функцию, называют сдвигом фаз.
Из формулы (18) с учетом (20), при  получим:
получим: 
Колебание ускорения опережает колебание координаты тела на 

Результаты, полученные нами алгебраическим и графическим методом, совпадают.
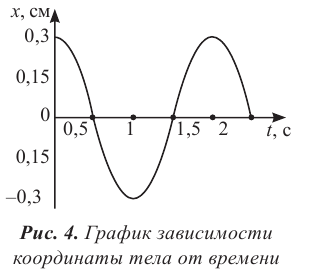
Запомните!
Для определения разности фаз необходимо выразить зависимость величин от времени через одну и ту же тригонометрическую функцию, используя формулы приведения.
Физика в нашей жизни:
В энциклопедическом словаре дано следующее определение пульса: Пульс (от лат. «рulsus» – удар, толчок) – периодическое толчкообразное расширение стенок артерий, синхронное с сокращением сердца. Пульс взрослого человека в покое 60-80 ударов в 1 минуту.
На рисунках 6-8 даны кардиограммы нормального, ускоренного и замедленного ритма сердцебиения. Оцените период и частоту сердцебиения при тахикардии и брадикардии, полагая, что пульс нормального ритма равен 60 ударов в минуту.
Являются ли сокращения сердца гармоническими колебаниями?

Интересно знать!
Колебания земной коры
- Землетрясение 1887 года магнитудой 7,3 разрушило строения на площади порядка 2000 км2 (рис. 9). Эпицентр колебаний находился южнее г. Верного (ныне Алматы) на 10–12 км.
- Выбор нового места для строительства г. Верного было поручено профессору Петербургского горного института И. В. Мушкетову.
- Алматы и ее окрестности относятся к Алматинскому сейсмоактивному району.
- Научным центром, занимающимся прогнозированием и изучением землетрясений, является Институт сейсмологии МОН РК, расположенный в г. Алматы.
- Согласно статистике Института сейсмологии МОН РК в 2015 году было зарегистрировано 11,5 тысяч землетрясений. В 2016 г. на тысячу меньше.

Итоги:
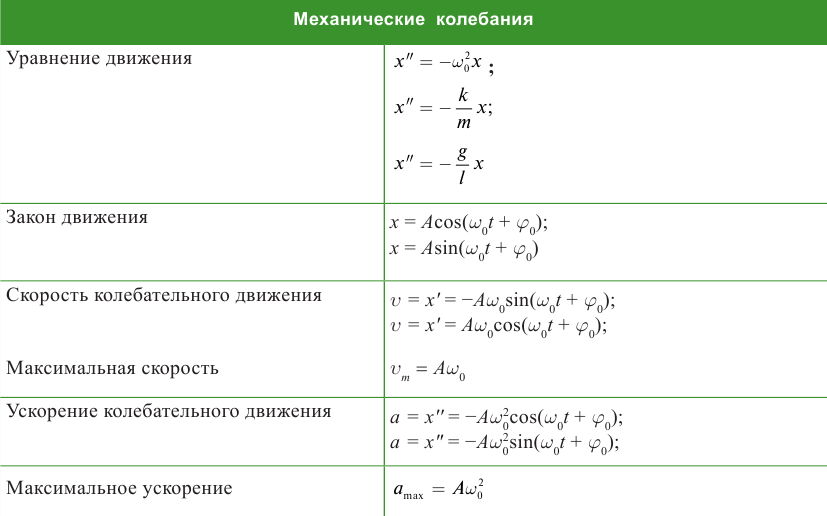
Глоссарий:
- Положение равновесия – положение тела, в котором векторная сумма сил, действующих на тело, равна нулю.
- Сдвиг фаз – разность фаз колебаний одной частоты, выраженных через одну тригонометрическую функцию.
- Фаза колебаний – угловая мера времени, выраженная в долях периода.
- Гармонические колебания в физике
- Вынужденные колебания в физике
- Электромагнитные колебания
- Свободные и вынужденные колебания в физике
- Закон Паскаля
- Закон Архимеда
- Движение жидкостей
- Уравнение Бернулли
I. Механика
Тестирование онлайн
Гармоническое колебание
Это периодическое колебание, при котором координата, скорость, ускорение, характеризующие движение, изменяются по закону синуса или косинуса.
График гармонического колебания
График устанавливает зависимость смещения тела со временем. Установим к пружинному маятнику карандаш, за маятником бумажную ленту, которая равномерно перемещается. Или математический маятник заставим оставлять след. На бумаге отобразится график движения.
Графиком гармонического колебания является синусоида (или косинусоида). По графику колебаний можно определить все характеристики колебательного движения.
Уравнение гармонического колебания
Уравнение гармонического колебания устанавливает зависимость координаты тела от времени
График косинуса в начальный момент имеет максимальное значение, а график синуса имеет в начальный момент нулевое значение. Если колебание начинаем исследовать из положения равновесия, то колебание будет повторять синусоиду. Если колебание начинаем рассматривать из положения максимального отклонения, то колебание опишет косинус. Или такое колебание можно описать формулой синуса с начальной фазой .
Изменение скорости и ускорения при гармоническом колебании
Не только координата тела изменяется со временем по закону синуса или косинуса. Но и такие величины, как сила, скорость и ускорение, тоже изменяются аналогично. Сила и ускорение максимальные, когда колеблющееся тело находится в крайних положениях, где смещение максимально, и равны нулю, когда тело проходит через положение равновесия. Скорость, наоборот, в крайних положениях равна нулю, а при прохождении телом положения равновесия — достигает максимального значения.
Если колебание описывать по закону косинуса
Если колебание описывать по закону синуса
Максимальные значения скорости и ускорения
Проанализировав уравнения зависимости v(t) и a(t), можно догадаться, что максимальные значения скорость и ускорение принимают в том случае, когда тригонометрический множитель равен 1 или -1. Определяются по формуле
Как получить зависимости v(t) и a(t)
Формулы зависимостей скорости от времени и ускорения от времени можно получить математически, зная зависимость координаты от времени. Аналогично равноускоренному движению, зависимость v(t) — это первая производная x(t). А зависимость a(t) — это вторая производная x(t).
При нахождении производной предполагаем, что переменной (то есть x в математике) является t, остальные физические величины воспринимаем как постоянные.
Гармонические колебания
О чем эта статья:
9 класс, 11 класс, ЕГЭ/ОГЭ
Механические колебания
Механические колебания — это физические процессы, которые точно или приблизительно повторяются через одинаковые интервалы времени.
Колебания делятся на два вида: свободные и вынужденные.
Свободные колебания
Это колебания, которые происходят под действием внутренних сил в колебательной системе.
Они всегда затухающие, потому что весь запас энергии, сообщенный в начале, в конце уходит на совершение работы по преодолению сил трения и сопротивления среды (в этом случае механическая энергия переходит во внутреннюю). Из-за этого свободные колебания почти не имеют практического применения.
Вынужденные колебания
А вот вынужденные колебания восполняют запас энергии внешним воздействием. Если это происходит каждый период, то колебания вообще затухать не будут.
Вынужденные колебания — это колебания, которые происходят под действием внешней периодически меняющейся силы.
Частота, с которой эта сила воздействует, равна частоте, с которой система будет колебаться.
Например, качели. Если вас кто-то будет на них качать, каждый раз давая толчок, когда вы приходите в одну и ту же точку — такое колебание будет считаться вынужденным.
Это колебание все еще будет считаться вынужденным, если вас будут раскачивать из положения равновесия. Просто в данном случае амплитуда (о которой речь пойдет чуть ниже) будет увеличиваться с каждым колебанием.
Автоколебания
Иногда вынужденному колебанию не нужно внешнего воздействия, чтобы случиться. Бывают такие системы, в которых это внешние воздействие возникает само из-за способности регулировать поступление энергии от постоянного источника.
У автоколебательной системы есть три важных составляющих:
- сама колебательная система
- источник энергии
- устройство обратной связи, обеспечивающей связь между источником и системой
Часы с кукушкой — пример автоколебательной системы. Гиря на ниточке (цепочке) стремится вращать зубчатое колесо (храповик). При колебаниях маятника анкер цепляет за зубец, и вращение приостанавливается.
Но в результате маятник получает толчок, компенсирующий потери энергии из-за трения. Потенциальная энергия гири, которая постепенно опускается, расходуется на поддержание незатухающих колебаний.
Характеристики колебаний
Чтобы перейти к гармоническим колебаниям, нам нужно описать величины, которые помогут нам эти колебания охарактеризовать. Любое колебательное движение можно описать величинами: период, частота, амплитуда, фаза колебаний.
Период — это время одного полного колебания. Измеряется в секундах и обозначается буквой T.
Формула периода колебаний
T = t/N
N — количество колебаний [—]
Также есть величина, обратная периоду — частота. Она показывает, сколько колебаний совершает система в единицу времени.
Формула частоты
ν = N/t = 1/T
N — количество колебаний [—]
Амплитуда — это максимальное отклонение от положения равновесия. Измеряется в метрах и обозначается либо буквой A, либо x max .
Она используется в уравнении гармонических колебаний:
Гармонические колебания
Простейший вид колебательного процесса — простые гармонические колебания, которые описывают уравнением:
Уравнение гармонических колебаний
x — координата в момент времени t [м]
t — момент времени [с]
(2πνt) в этом уравнении — это фаза. Ее обозначают греческой буквой φ
Фаза колебаний
t — момент времени [с]
Фаза колебаний — это физическая величина, которая показывает отклонение точки от положения равновесия. Посмотрите на рисунок, на нем изображены одинаковые фазы:
Например, в тех же самых часах с кукушкой маятник совершает колебания. Он качается слева направо и приходит в самую правую точку. В той же фазе он будет находиться, когда придет в ту же точку, идя справа налево. Если мы возьмем точку на сантиметр левее самой правой, то идя в нее не слева направо, а справа налево, мы получим уже другую фазу.
На рисунке ниже показаны положения тела через одинаковые промежутки времени при гармонических колебаниях. Такую картину можно получить при освещении колеблющегося тела короткими периодическими вспышками света (стробоскопическое освещение). Стрелки изображают векторы скорости тела в различные моменты времени.
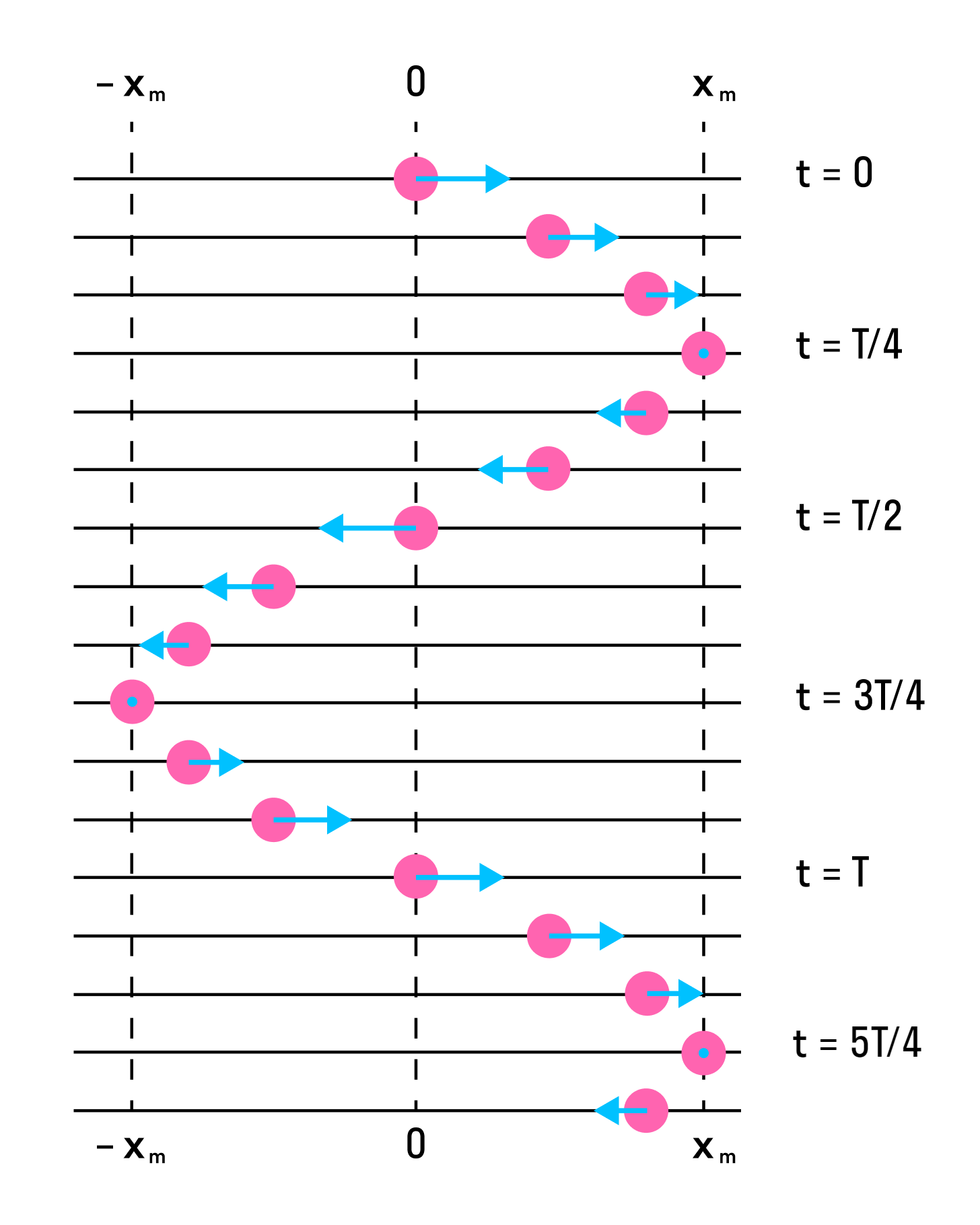
Если изменить период, начальную фазу или амплитуду колебания, графики тоже изменятся.
На рисунке ниже во всех трех случаях для синих кривых начальная фаза равна нулю, а в последнем (с) — красная кривая имеет меньшую начальную фазу.
В первом случае (а) красная кривая описывает колебание, у которого амплитуда больше колебания, описанного синей линией.
Во втором случае (b) красная кривая отличается от синей только значением периода — у красной период в два раза меньше.
Математический маятник
Математический маятник — отличный пример гармонических колебаний. Если мы подвесим шарик на нити, то это еще не будет математическим маятником — пока он только физический.
Математическим этот маятник станет, если размеры шарика много меньше длины нити (тогда этими размерами можно пренебречь и рассматривать шарик как материальную точку), растяжение нити очень мало, а масса нити во много раз меньше массы шарика.
Математическим маятником называется система, которая состоит из материальной точки массой m и невесомой нерастяжимой нити длиной l, на которой материальная точка подвешена, и которая находится в поле силы тяжести (или других сил).
Период малых колебаний математического маятника в поле силы тяжести Земли определяется по формуле:
Формула периода колебания математического маятника
l — длина нити [м]
g — ускорение свободного падения [м/с 2 ]
На планете Земля g = 9,8 м/с 2
Пружинный маятник
Пружинный маятник — это груз, прикрепленный к пружине, массой которой можно пренебречь.
В пружинном маятнике колебания совершаются под действием силы упругости.
Пока пружина не деформирована, сила упругости на тело не действует.
Формула периода колебания пружинного маятника
m — масса маятника [кг]
k — жесткость пружины [Н/м]
Закон сохранения энергии для гармонических колебаний
Физика — такая клевая наука, в которой ничего не исчезает бесследно и не появляется из ниоткуда. Эту особенность описывает закон сохранения энергии.
Рассмотрим его на примере математического маятника.
- Когда маятник отклоняют на высоту h, его потенциальная энергия максимальна.
- Когда маятник опускается, потенциальная энергия переходит в кинетическую. Причем в нижней точке, где потенциальная энергия равна нулю, кинетическая энергия максимальна и равна потенциальной энергии в верхней точке. Скорость груза в этой точке максимальна.
Онлайн-курсы физики в Skysmart не менее увлекательны, чем наши статьи!
Колебательное движение в физике — виды, формулы и определения с примерами
Содержание:
Колебательное движение:
Колебательное движение (колебания) — один из наиболее распространённых процессов в природе и технике.
Наблюдение. Под действием ветра колеблются высотные дома и высоковольтные линии электропередачи, совершают колебания маятник заведённых часов, автомобиль на рессорах во время движения. Землетрясения — это колебания земной коры, приливы и отливы — колебания уровня воды в морях и океанах, обусловленные притяжением Луны, удары пульса — результат периодических сокращений сердечной мышцы человека.
Колебательные явления изучает специальный раздел физики — теория колебаний. Знания о колебательных процессах нужны судо- и самолётостроителям, специалистам промышленности и транспорта, конструкторам радиотехнической и звуковой аппаратуры и др.
Опыт 1.
Для наблюдения и изучения колебаний, а также для применения в разнообразных приборах используют маятники. Простейший маятник — это шарик, подвешенный на нити к какой-либо опоре. Если шарик отклонить от исходного положения равновесия и отпустить, то он начнёт двигаться слева направо, справа налево до тех пор, пока колебания не прекратятся (рис. 25).
В физике маятник подобной конструкции называют математическим маятником.
Каковы же самые характерные признаки колебательных движении? Проведённый опыт даёт возможность сделать вывод, что во время колебаний определённые состояния движения тела повторяются или почти повторяется. Сделав одно полное колебание, т. е. пройдя путь от крайнего левого положения к крайнему правому и назад, тело, подвешенное на нити, и в дальнейшем будет повторять такое же движение. Мы уже знаем, если движение тела повторяется со временем, то его называют периодическим.
Механические колебания — это такое движение, при котором положение и скорость движения тела точно или приблизительно повторяются через определённые интервалы времени.
Повторяются движения поршня в двигателе автомобиля, лодок на волнах, стержня отбойного молотка, сита сортировочной установки. Всё это примеры механических колебаний.
Математический маятник состоит из нескольких тел, взаимодействующих между собой: Земля и шарик, шарик и нить, нить и опора в точке подвеса. Если действием других тел на маятник можно пренебречь, то говорят, что тела в составе маятника образуют колебательную систему. Если вывести колебательную систему из состояния равновесия — отклонить шарик из исходного положения и отпустить, то далее колебания будут продолжаться без внешнего вмешательства за счёт взаимодействия между телами системы. Колебания, происходящие в колебательной системе за счёт взаимно действия между образующими её телами, называют свободными.
Рассмотренные нами колебания шарика на нити являются примером свободных колебаний.
А какой вид имеют колебания и какими физическими величинами они характеризуются?
Опыт 2.
Возьмём маятник, в котором вместо шарика подвешен грузик со сквозным отверстием. С помощью такого устройства можно записывать колебания (рис. 26).
Установим в отверстие грузика фломастер, выведем грузик из положения равновесия и отпустим. Маятник колеблется, а фломастер, касаясь листа картона, который мы равномерно протягиваем во время колебаний, оставляет на нём след.
В результате опыта получаем график колебаний маятника в виде начерченной линии (рис. 27), т. е. зависимость отклонения маятника от времени. Позже будем подробно изучать эту важную волнистую линию, называемую синусоидой.
Как видно из рисунка 27, маятник в определенный момент отклоняется от положения равновесия на некоторое максимальное расстояние. Это отклонение маятника назвали амплитудой колебаний.
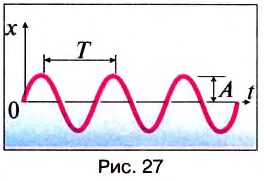
Амплитуда колебаний — это наибольшее отклонение тела от положения равновесия.
Амплитуду колебаний обозначают большой латинской буквой А. Её единицей в СИ является один метр (1 м). Значение амплитуды зависит только от того, на какое расстояние тело было отведено от положения равновесия до начала колебаний.
Маятник выполняет одно полное колебание за определённое время. Продолжительность одного полного колебания называют периодом колебаний.
Период колебаний — это наименьший интервал времени, через который определённое состояние движения тела полностью повторяется.
Период колебаний обозначают большой латинской буквой Т. Его единицей в СИ является одна секунда (1 с).
Если за время t произошло N полных колебаний, то, чтобы определить период Т, нужно t поделить на N, т. е.:  .
.
Опыт 3.
Возьмём маятник, как в опыте 2, но подвесим грузик на нить большей длины. Потом так же запишем график колебаний нового маятника и сравним его с (графиком в опыте 2. Увидим, что чем больше длина маятника, тем больше период его колебаний (рис. 28).
Период колебаний маятника зависит от его длины. Чем длиннее маятник, тем больше период его колебаний.
Если выполнить опыты с пружинным маятником, который состоит из пружины и подвешенного к нему тела, то окажется, что чем больше масса подвешенного к пружине тела, тем больше период колебаний пружинного маятника.
Колебания характеризуются также частотой колебаний, которая обозначается греческой буквой  (ню).
(ню).
Частота колебаний определяется числом колебаний, выполненных системой за единицу времени.
Если за время t произошло N колебаний, то, чтобы определить частоту  , нужно N разделить на t , т. е.:
, нужно N разделить на t , т. е.:
 , или
, или  .
.
Частота и период колебаний связаны обратно пропорциональной зависимостью, поэтому:  ,
,
где Т— период колебаний; — частота колебаний.
Единицей частоты в СИ является один герц (1 Гц). 1 Гц = 1  . Она названа так в честь известного немецкого физика Генриха Герца. Если частота колебаний
. Она названа так в честь известного немецкого физика Генриха Герца. Если частота колебаний  = 1 Гц, то это означает, что происходит одно колебание в секунду. Приблизительно с такой частотой бьётся человеческое сердце. Если
= 1 Гц, то это означает, что происходит одно колебание в секунду. Приблизительно с такой частотой бьётся человеческое сердце. Если  = 50 Гц, то происходят 50 колебаний в секунду.
= 50 Гц, то происходят 50 колебаний в секунду.
Исследования показали, что сердце мыши совершает 600 ударов в минуту, а кита — 15 ударов в минуту. Тем не менее оба сердца сокращаются за время жизни животного около 750 млн раз.
Пример задачи:
Если при вращении шлифовального круга скорость движения точек на его краю равна 95  , то возникает опасность разрыва круга. Можно ли этот круг радиусом 20 см вращать с частотой 100
, то возникает опасность разрыва круга. Можно ли этот круг радиусом 20 см вращать с частотой 100  ?
?
Дано:
 = 95
= 95
 = 20см
= 20см
 = 100
= 100
 = ?
= ?
Решение:
По условию задачи — значение скорости, при которой возникает опасность разрыва круга; — значение скорости, которую будут иметь точки на краю круга, определяем по формуле 
Для одного оборота путь  , где
, где  = 3,14;
= 3,14;
 , а
, а  ,
,  тогда
тогда  .
.
Подставив значения, получим:

Ответ: полученное значение скорости больше того, при котором возникает опасность разрыва. Значит, шлифовальный круг нельзя вращать с частотой 100  .
.
Колебательные движения -амплитуда, период и частота колебаний
Колебания — самая распространенная форма движения в окружающем мире и технике. Колеблются деревья под действием ветра, поршни в двигателе автомобиля и т. п. Мы можем разговаривать и слышать звуки благодаря колебаниям голосовых связок, воздуха и барабанных перепонок. Колеблется сердце. Все это примеры механических колебаний. Свет — это тоже колебания, но электромагнитные. С помощью электромагнитных колебаний, распространяющихся в пространстве, осуществляют радиосвязь, радиолокацию, телевидение, а также лечат различные болезни.
На первый взгляд, приведенные примеры колебаний имеют мало общего. Однако при их исследовании выяснилось, что разные по природе колебания описываются одинаковыми математическими уравнениями, что значительно облегчает их изучение.
Как же возникают механические колебания? Рассмотрим движение шара с отверстием, прикрепленного к одному концу зафиксированной пружины на горизонтально расположенном стержне. Второй конец пружины закреплен в стене (рис. 21). Пусть в начальный момент шар находится в положении равновесия ОО’ . Рассмотрим идеальный случай, когда в данной системе отсутствует трение, то есть механическая энергия не уменьшается.
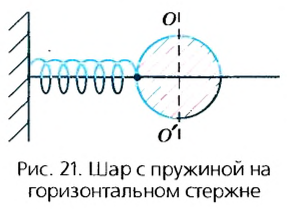
Переместим шар вправо от положения равновесия, пружина при I этом растянется. Если шар отпустить, пружина заставит его двигаться к положению равновесия. Поскольку в системе трения нет, то шар пройдет положение равновесия и, двигаясь влево, сожмет пружину. Достигнув крайнего левого положения, шар будет двигаться вправо и вернется в крайнее правое положение. Пружина при этом опять будет максимально растянутой. В данном случае шар выполнит одно полное колебание. В дальнейшем в идеальной системе (без трения) такие колебания будут совершаться как угодно долго.
Очевидно, что отличительной особенностью колебаний является их периодичность. Но периодичными являются и вращательные движения. В отличие от вращательных движений, у которых для каждой точки имеются траектории в виде окружности, во время колебательных движений точка или тело двигаются в противоположных направлениях по одной и той же траектории.
В колебательном движении точка (тело) проходит все точки траектории движения (кроме двух крайних точек) дважды — один раз в одном направлении, второй — в обратном.
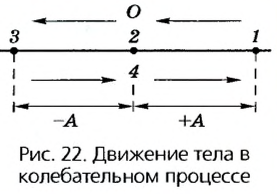
На рисунке 22 изображено одно полное колебание шара с пружиной. Движение осуществляется в такой последовательности от точки к точке:

и опять повторяется.
Максимальное отклонение колеблющегося тела от положения равновесия называется амплитудой колебания тела (на рис. +А и -А).
Время, в течение которого осуществляется одно полное колебание тела, называется периодом колебания тела Т.
Основной единицей периода колебаний является секунда.
Частота колебаний измеряется в единицах в секунду. Эта единица Частота колебаний называется герц (Гц) в честь немецкого физика Генриха Герца, который в 1884 г. экспериментально доказал существование электромагнитных волн.
Частота колебаний f* показывает какое количество колебаний совершает тело за единицу времени.
Период колебания тел Т связан с частотой их колебаний f соотношением:

Карта колебательного движения
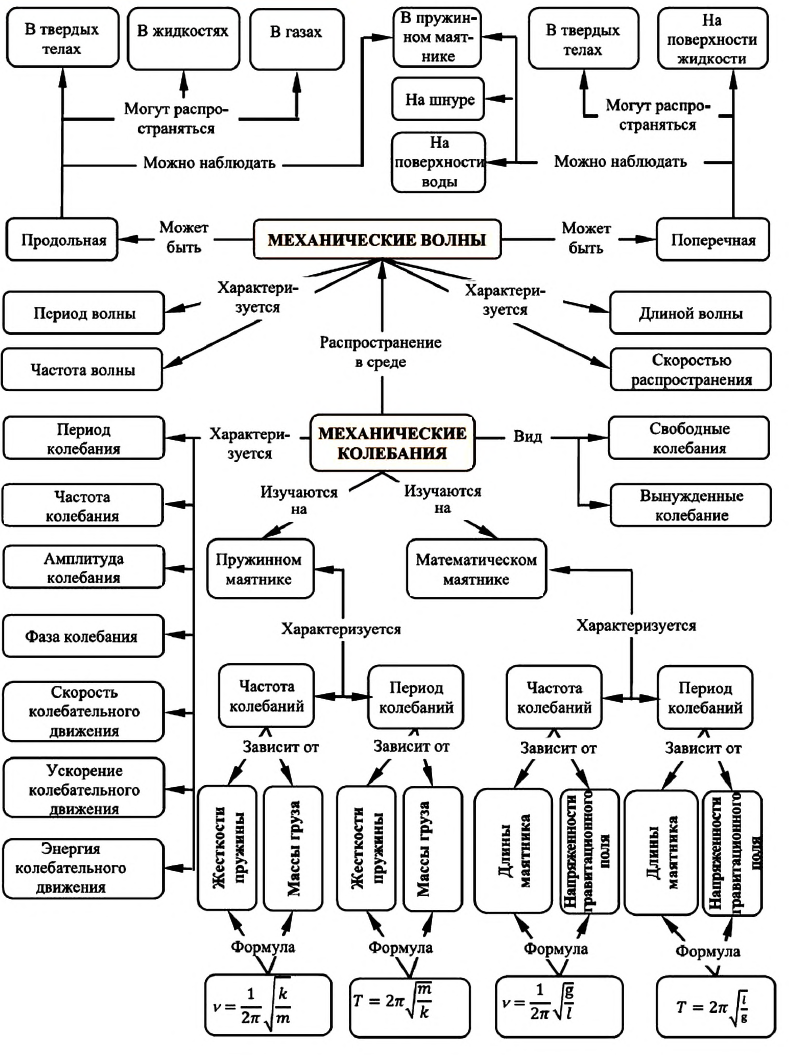
Механическое колебательное движение. Одно из наиболее распространенных движений в природе — механическое колебательное движение.
Механическое колебательное движение — это полностью или частично повторяющееся движение тела в противоположных направлениях около положения устойчивого равновесия. Другими словами: механическое колебательное движение — это перемещение то в одном, то в другом направлении вокруг положения равновесия тела или системы тел.
Колебательное движение может быть периодическим и непериодическим:
Периодическое колебательное движение — это колебания тела или системы тел, повторяющиеся через одинаковые промежутки времени.
Непериодическое колебательное движение — это колебания тела или системы тел, повторяющиеся через произвольные промежутки времени. У таких колебаний определенных периодов нет.
Периодические колебания в основном бывают двух видов: вынужденные и свободные колебания.
Вынужденные колебания — это колебания, возникающие в результате воздействия внешней периодически изменяющейся силы.
Свободные колебания — это колебания, возникающие в результате действия внутренних сил замкнутой системы.
Свободные колебания:
Для простоты проведения измерений и вычислений при изучении колебательного движения удобно воспользоваться замкнутой системой. В замкнутой системе тела совершают колебательные движения в результате действия внутренних сил.
Колебания груза, прикрепленного к пружине (система пружина-груз), или тела, подвешенного на нити (система нить-тело), можно отнести к свободным колебаниям. Внутренней силой в системе пружина-груз является сила упругости пружины, в системе нить-тело — сила тяжести, действующая на тело.
Кинематические характеристики колебательного движения. Ознакомимся с некоторыми из них.
Смещение — это физическая величина, показывающая, в какую сторону и на сколько удаляется от положения равновесия колеблющееся тело за определенный промежуток времени. Например, предположим, что тело массой  совершает повторяющиеся периодические движения вокруг точки равновесия
совершает повторяющиеся периодические движения вокруг точки равновесия  вправо и влево от нее, вдоль оси
вправо и влево от нее, вдоль оси  Координата тела
Координата тела  в данный момент времени
в данный момент времени  показывает смещение этого тела от его положения равновесия (а).
показывает смещение этого тела от его положения равновесия (а).
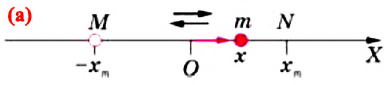
Амплитуда — это наибольшее смещение колеблющегося тела от положения равновесия. Амплитуда обозначается  или
или  а единица ее измерения в СИ—метр (м).
а единица ее измерения в СИ—метр (м).
Если тело, двигаясь вправо от точки равновесия  смещается на амплитуду
смещается на амплитуду  (точка
(точка  затем, остановившись на мгновение, возвращается в точку
затем, остановившись на мгновение, возвращается в точку  движется влево, смещаясь до точки с координатой —
движется влево, смещаясь до точки с координатой —  (точка
(точка  и остановившись в этой точке на мгновение, снова вернется в точку то это движение тела называется одно полное колебание (см: а). Таким образом, тело за время одного полного колебания проходит путь, равный 4 амплитудам:
и остановившись в этой точке на мгновение, снова вернется в точку то это движение тела называется одно полное колебание (см: а). Таким образом, тело за время одного полного колебания проходит путь, равный 4 амплитудам:

Если тело за промежуток времени  совершит
совершит  колебаний, то пройденный им путь будет равен:
колебаний, то пройденный им путь будет равен:

Где  (ню) — частота колебаний,
(ню) — частота колебаний,  — период колебаний.
— период колебаний.
Частота колебаний -это физическая величина, численно равная числу колебаний за одну секунду:

За единицу измерения частоты колебания в СИ принята величина, названная в честь немецкого ученого Генри Герца, герц (1Гц). 1 Гц — это частота таких колебаний, при которых за 1с совершается 1 колебание: 
Период колебаний — это время, за которое совершается одно полное колебание:

Единица измерения периода в СИ — секунда (1 с): 
Период и частота колебаний — взаимно обратные величины:
 или
или 
Циклическая частота, являясь величиной в  раза большей частоты колебаний, показывает, сколько колебаний совершает тело за 6,28 секунды
раза большей частоты колебаний, показывает, сколько колебаний совершает тело за 6,28 секунды 

Здесь  (омега) — циклическая частота. Единица измерения циклической частоты в СИ:
(омега) — циклическая частота. Единица измерения циклической частоты в СИ:
Гармоническое колебание и его график:
Самым простым колебательным движением является гармоническое колебание.
Гармонические колебания — это колебания, при которых величины, характеризующие движение, изменяются со временем по закону синуса или косинуса.
Изменения положения тела, совершающего свободные гармонические колебания, описываются кривой, которая является синусоидой или косинусоидой. Кривую синусоиды (или косинусоиды) с легкостью можно наблюдать во время проведения опыта как с пружинным, так и с нитевым маятником, представляющим собой наполненную песком воронку с небольшим отверстием внизу (b).
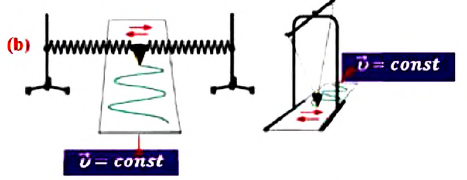
Эта кривая соответствует графику изменения перемещения маятника  от времени
от времени  по закону синуса или косинуса (с):
по закону синуса или косинуса (с):


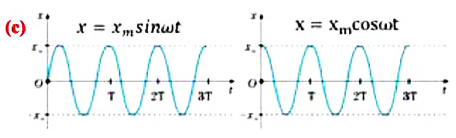
Из графика видно, что за время, равное периоду колебания маятник совершает одно полное колебание (см: с).
Отсутствие действия внешних сил на замкнутую систему приводит к тому, что ее полная механическая энергия не изменяется. Это означает, что в идеальных условиях амплитуда свободных колебаний в замкнутой системе не изменяется, то есть колебания не затухают. Однако в реальности свободные колебания затухают — под действием сил трения с течением времени полная механическая энергия системы уменьшается, то есть уменьшается амплитуда колебаний и колебания затухают (d).
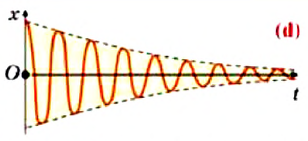
Затухающие колебания — это колебания в замкнутой колебательной системе, в которой в результате действия сил трения происходит постепенное уменьшение полной механической энергии системы и уменьшение амплитуды колебаний.
Всё о колебательном движение
При равномерном вращении материальной точки по окружности радиусом R с угловой скоростью  угол поворота
угол поворота материальной точки изменяется со временем по закону
материальной точки изменяется со временем по закону  . При таком движении центростремительное (нормальное) ускорение материальной точки направлено к центру окружности и вычисляется по формуле
. При таком движении центростремительное (нормальное) ускорение материальной точки направлено к центру окружности и вычисляется по формуле  где v — модуль линейной скорости.
где v — модуль линейной скорости.
Положение механической системы, в котором равнодействующая всех действующих сил равна нулю, называется положением равновесия.
Колебательным движением (колебаниями) называют всякий процесс, который обладает свойством повторяемости во времени. Периодическим называется движение, при котором физические величины, характеризующие его, через равные промежутки времени принимают одни и те же значения. Периодическое движение называется колебательным, если тело или материальная точка движется вблизи устойчивого положения равновесия, отклоняясь то в одну, то в другую сторону. При этом через любую точку траектории, за исключением крайних, тело проходит как в прямом, так и в обратном направлении. Следовательно, отличительным признаком колебательного движения является его возвратность.
Например, механическим колебательным движением является движение тела, подвешенного на нити, движение груза на пружине. Колебания могут быть не только механическими, но и электромагнитными (периодические изменения напряжения и силы тока в цепи), термодинамическими (колебания температуры с течением времени).
Таким образом, колебания — это особая форма движения. Его особенностью является тот факт, что различные по своей природе физические процессы (механические, электромагнитные и т. д.) описываются одинаковыми математическими зависимостями физических величин от времени.
Опыт показывает, что для возникновения и существования механических колебаний в некоторой системе необходимо выполнение определенных условий. Прежде всего, при выведении (например, при малом смещении) тела из положения равновесия в системе должна возникать результирующая сила, стремящаяся возвратить тело в положение равновесия. Кроме того, в системе должно существовать достаточно малое трение, поскольку в противном случае колебания быстро затухнут или могут не возникнуть вообще.
Рассмотрим движение небольшого тела М, которое будем считать материальной точкой (рис. 1), по окружности радиусом R с постоянной по модулю линейной скоростью  . Пусть рассматриваемое движение происходит против хода часовой стрелки.
. Пусть рассматриваемое движение происходит против хода часовой стрелки.
Если в начальный момент времени  = 0 материальная точка находилась в положении то через промежуток времени
= 0 материальная точка находилась в положении то через промежуток времени  = t —
= t —  она окажется в некотором положении М. Обозначим координату материальной точки в этом положении через х. Координата х на рисунке соответствует координате точки В на оси Ох.
она окажется в некотором положении М. Обозначим координату материальной точки в этом положении через х. Координата х на рисунке соответствует координате точки В на оси Ох.
Поскольку при движении точки М по окружности ее координата х будет периодически изменяться от +R до -R, то можно сказать что точка В совершает колебательное движение вдоль оси Ох, а ее координата х является координатой колеблющейся точки.
Соответственно, проекция  линейной скорости
линейной скорости  материальной точки на ось Ох в данный момент времени является скоростью точки В, а проекция а, ее центростремительного ускорения
материальной точки на ось Ох в данный момент времени является скоростью точки В, а проекция а, ее центростремительного ускорения  — ускорением точки В.
— ускорением точки В.
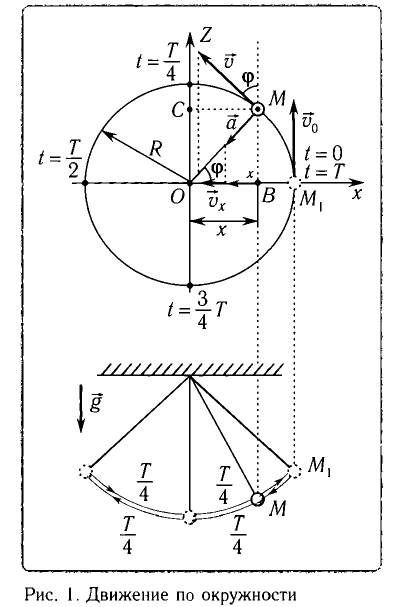
Радиус, соединяющий движущуюся точку М с центром окружности О, за промежуток времени повернулся на угол  , называемый фазовым углом или просто фазой. Из рисунка видно, что
, называемый фазовым углом или просто фазой. Из рисунка видно, что

Если  — угловая скорость движения материальной точки, а начальный момент движения = 0, то
— угловая скорость движения материальной точки, а начальный момент движения = 0, то
где Т — период ее вращения по окружности.
Тогда координату x, проекцию скорости  и проекцию ускорения
и проекцию ускорения  точки В в любой момент времени можно определить по формулам:
точки В в любой момент времени можно определить по формулам:
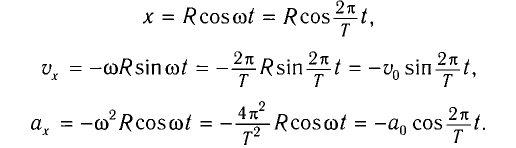
Поскольку функции  периодические, то через промежуток времени Т, по истечении которого угол
периодические, то через промежуток времени Т, по истечении которого угол  изменится на
изменится на  , все характеристики движения точки В вдоль оси Ох (координата, проекция скорости и проекция ускорения) примут прежние значения (табл. 1). Точка В в течение этого промежутка времени дважды проходит через центр окружности, двигаясь в противоположных направлениях вдоль оси Ох (см. рис. 1). Как уже отмечалось, возвратность — основной признак колебательного движения.
, все характеристики движения точки В вдоль оси Ох (координата, проекция скорости и проекция ускорения) примут прежние значения (табл. 1). Точка В в течение этого промежутка времени дважды проходит через центр окружности, двигаясь в противоположных направлениях вдоль оси Ох (см. рис. 1). Как уже отмечалось, возвратность — основной признак колебательного движения.
Таблица I
Координата х, проекция скорости  и проекция ускорения
и проекция ускорения  тела, движущегося по окружности, в различные моменты времени t
тела, движущегося по окружности, в различные моменты времени t
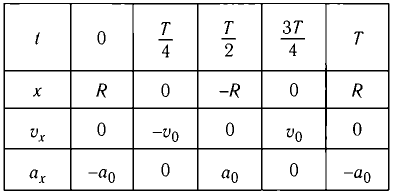
Зависимость координаты х, проекции скорости и проекции ускорения от времени t (промежутка времени) показаны на рисунке 2.
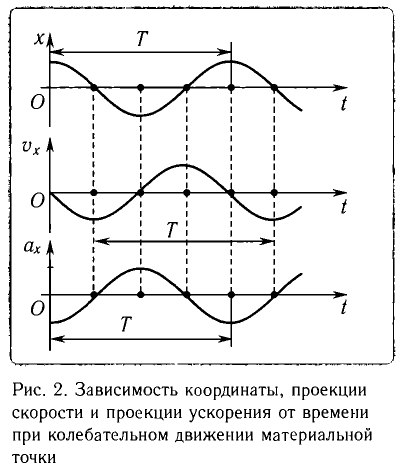
Наиболее важными величинами, характеризующими механические колебания, являются:
x(t) — координата материальной точки или ее отклонение из положения равновесия в момент времени t:

гдe f(t) — заданная периодическая функция времени t,T— период этой функции;
А (А > 0) — амплитуда — максимальное смещение  тела или системы тел из положения устойчивого равновесия;
тела или системы тел из положения устойчивого равновесия;
т =  — период — длительность одного полного колебания, т. е. наименьший промежуток времени, по истечении которого повторяются значения всех физических величин, характеризующих колебание. Здесь t — время совершения N полных колебаний.
— период — длительность одного полного колебания, т. е. наименьший промежуток времени, по истечении которого повторяются значения всех физических величин, характеризующих колебание. Здесь t — время совершения N полных колебаний.
В СИ основной единицей периода (времени) является секунда (1 с).
v — частота — число полных колебаний, совершаемых в единицу времени:
В СИ основной единицей частоты является герц (1 Гц). 1 Гц равен частоте, при которой за 1 с тело совершает одно полное колебание (1 Гц= 1  ).
).
 — циклическая частота — число полных колебаний, совершаемых за промежуток времени
— циклическая частота — число полных колебаний, совершаемых за промежуток времени  , равный
, равный  секунд:
секунд:
В СИ основной единицей циклической частоты является радиан в секунду (1 )
)
 — фаза — аргумент периодической функции, определяющий значение физической величины в любой момент времени t. Она определяет состояние колебательной системы (координаты, скорости, ускорения) в любой момент времени при заданной амплитуде. Единицей фазы является радиан (1 рад).
— фаза — аргумент периодической функции, определяющий значение физической величины в любой момент времени t. Она определяет состояние колебательной системы (координаты, скорости, ускорения) в любой момент времени при заданной амплитуде. Единицей фазы является радиан (1 рад).
 — начальная фаза, определяющая состояние колебательной системы в начальный момент времени (
— начальная фаза, определяющая состояние колебательной системы в начальный момент времени (  = 0).
= 0).
Колебания, при которых координата (смещение) тела со временем изменяется по закону косинуса


называются гармоническими.
Обратим внимание на то, что координата  и проекция ускорения
и проекция ускорения  точки В (см. рис. 1) в любой момент времени связаны соотношением
точки В (см. рис. 1) в любой момент времени связаны соотношением . Это соотношение позволяет сделать вывод, что при гармонических колебаниях проекция ускорения точки прямо пропорциональна ее смещению от положения равновесия и противоположна ему по знаку.
. Это соотношение позволяет сделать вывод, что при гармонических колебаниях проекция ускорения точки прямо пропорциональна ее смещению от положения равновесия и противоположна ему по знаку.
Данное соотношение, записанное в виде
 (1)
(1)
представляет собой уравнение гармонических колебаний (гармонического осциллятора).
Так как ускорение всегда обусловлено действием силы, то  т. е.
т. е.  При гармонических колебаниях проекция
При гармонических колебаниях проекция  силы, возвращающей тело в положение равновесия (х = 0), пропорциональна его координате:
силы, возвращающей тело в положение равновесия (х = 0), пропорциональна его координате:

Знак «минус» отражает возвратный характер возникающей силы. Как уже отмечалось, появление возвращающей силы при отклонении тела от положения равновесия является необходимым условием возникновения колебаний.
При достаточно малой амплитуде любые колебания можно приближенно считать гармоническими.
Положению равновесия тела соответствует точка х = 0, так как при этом равнодействующая сила, приложенная к нему, равна нулю ( ).
).
Различают несколько видов равновесия. Равновесие называется устойчивым, если при малом отклонении тела от положения равновесия возникают силы, возвращающие его в исходное положение. Равновесие называется неустойчивым, если при малом отклонении тела от положения равновесия возникают силы, вызывающие дальнейшее отклонение тела от положения равновесия. Равновесие называется безразличным, если при отклонении тела от положения равновесия равнодействующая сила остается равной нулю.
Примером устойчивого равновесия может служить равновесие небольшого шарика в сферической ямке, а примером неустойчивого — равновесие шарика на вершине сферической горки. Равновесие шарика на горизонтальной поверхности является безразличным.
Таким образом, колебания материальной точки являются гармоническими, если они происходят под действием возвращающей силы, модуль которой прямо пропорционален смещению точки из положения равновесия и направленной к положению равновесия колеблющегося тела.
Если рассмотреть проекцию точки М на ось Оу (точка С на рис. 1), то ее координата y(t) будет совершать гармонические колебания вдоль оси Оу.
Таким образом, движение по окружности с постоянной по модулю линейной скоростью можно рассматривать как два гармонических колебательных движения, происходящих одновременно в двух взаимно перпендикулярных направлениях.
Пример №1
За какую часть периода тело, совершающее гармонические колебания, проходит расстояние: а) от среднего положения до крайнего; б) первую половину этого расстояния; в) вторую половину этого расстояния?
Решение
Координата х тела, совершающего гармонические колебания, определяется
Здесь А — амплитуда, t — время, отсчитываемое с момента прохождения телом положения равновесия, Т — период колебаний, 0) — амплитуда — максимальное смещение  тела или системы тел из положения равновесия;
тела или системы тел из положения равновесия;
Т — период — длительность одного полного колебания, т. е. наименьший промежуток времени, по истечении которого повторяются значения всех физических величин, характеризующих колебание. В СИ единицей периода является секунда (1с);
v — частота — число полных колебаний в единицу времени: 
В СИ единицей частоты колебаний является герц. Один герц равен частоте колебаний тела, при которой за одну секунду тело совершает одно полное колебание 
 — циклическая частота — число полных колебаний за промежуток времени
— циклическая частота — число полных колебаний за промежуток времени  равный
равный  секунд:
секунд: 
В СИ единицей циклической частоты является радиан в секунду 
 — фаза — аргумент периодической функции, определяющий значение изменяющейся физической величины в данный момент времени /.
— фаза — аргумент периодической функции, определяющий значение изменяющейся физической величины в данный момент времени /.
Единицей фазы является радиан (1 рад);
 — начальная фаза, определяющая положение тела в начальный момент времени
— начальная фаза, определяющая положение тела в начальный момент времени 
Колебания, при которых зависимость координаты (смещения) тела от времени описывается формулами 
называются гармоническими.
Зависимость координаты от времени x(t) называется кинематическим законом гармонических колебаний (законом движения), поскольку позволяет определить положение тела, его скорость, ускорение в произвольный момент времени. Систему (тело), которая совершает гармонические колебания, называют гармонической колебательной системой или одномерным гармоническим осциллятором.
Обратим внимание на то, что координата  и проекция ускорения
и проекция ускорения  точки В (см. рис. 180) в любой момент времени связаны соотношением
точки В (см. рис. 180) в любой момент времени связаны соотношением  Это соотношение позволяет сделать вывод, что при гармонических колебаниях проекция ускорения точки прямо пропорциональна ее смещению из положения равновесия и противоположна ему по знаку.
Это соотношение позволяет сделать вывод, что при гармонических колебаниях проекция ускорения точки прямо пропорциональна ее смещению из положения равновесия и противоположна ему по знаку.
Данное соотношение, записанное в виде 
представляет собой уравнение гармонических колебаний (гармонического осциллятора).
Так как ускорение всегда обусловлено действием силы, то  т. е.
т. е.  При гармонических колебаниях модуль силы, возвращающей тело в положение равновесия (х = 0), пропорционален ее координате
При гармонических колебаниях модуль силы, возвращающей тело в положение равновесия (х = 0), пропорционален ее координате  причем знак «минус» отражает «возвратный» характер возникающей силы. Как уже отмечалось, появление возвращающей силы при отклонении тела от положения равновесия является необходимым условием возникновения колебаний.
причем знак «минус» отражает «возвратный» характер возникающей силы. Как уже отмечалось, появление возвращающей силы при отклонении тела от положения равновесия является необходимым условием возникновения колебаний.
При достаточно малой амплитуде колебаний любой колебательный процесс можно приближенно считать гармоническим.
Положению равновесия соответствует точка х = 0, так как при этом сила, действующая на тело, равна нулю 
Таким образом, колебания материальной точки являются гармоническими, если они происходят под действием возвращающей силы, модуль которой прямо пропорционален смещению точки из положения равновесия и направлен к положению равновесия колеблющегося тела.
Уравнение гармонических колебаний можно получить и с помощью законов динамики, анализируя силы, действующие на систему. Подобное (динамическое) описание не содержит никаких сведений ни об амплитуде, ни о начальной фазе. Его необходимо дополнять начальными условиями, а именно: задавать положение тела и его скорость в начальный момент времени.
Заметим, что гармонические колебания вдоль оси Оу будет совершать и координата у тела, вращающегося по окружности с постоянной по модулю скоростью (см. рис. 179).
Движение по окружности с постоянной по модулю скоростью можно рассматривать как два гармонических колебательных движения, совершаемых в двух взаимно перпендикулярных направлениях.
Превращения энергии при колебательном движении
Механическая энергия системы равна сумме ее кинетической и потенциальной энергий. Кинетической энергией тело обладает вследствие своего движения, а потенциальная энергия определяется взаимодействием тела с другими телами или полями. Механическая энергия замкнутой системы, в которой не действуют силы трения (сопротивления), сохраняется.
Поскольку при одномерных колебаниях гармонического осциллятора силу трения не учитывают, то его механическая энергия сохраняется.
Рассмотрим превращения энергии при колебаниях математического маятника. Выберем систему отсчета таким образом, чтобы в положении равновесия его потенциальная энергия была равна нулю.
При отклонении маятника на угол  (рис. 183), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:
(рис. 183), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю: 
Поскольку в положении равновесия его потенциальная энергия равна нулю, то кинетическая энергия (а следовательно, и скорость) будет максимальна:

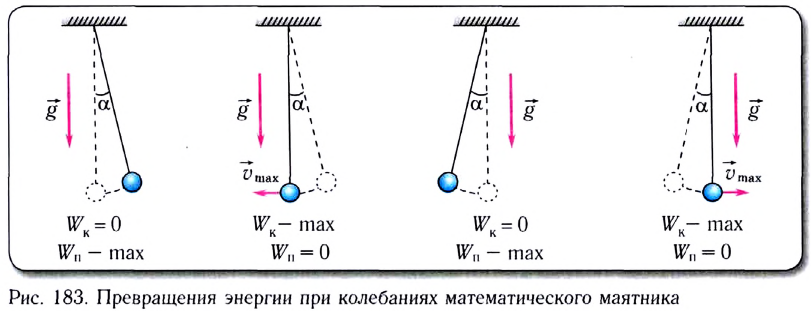
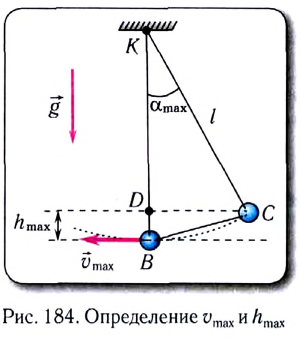
Из закона сохранения механической энергии следует (рис. 184), что 
Отсюда найдем максимальную скорость маятника: 
Высоту  можно выразить через длину маятника l и амплитуду колебаний А.
можно выразить через длину маятника l и амплитуду колебаний А.
Если колебания малы, то  Из треугольника KCD на рисунке 184 находим
Из треугольника KCD на рисунке 184 находим 
Отсюда имеем 
Подставив выражение для  в формулу (2), получим
в формулу (2), получим 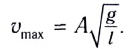
Подставляя выражения для  в соотношение (1), находим
в соотношение (1), находим 
Таким образом, в положении равновесия потенциальная энергия полностью переходит в кинетическую, а в положениях максимального отклонения кинетическая энергия полностью переходит в потенциальную.
В любом промежуточном положении 
Покажем, что аналогичные превращения энергии имеют место и для пружинного маятника (рис. 185).
В крайних точках, когда  скорость равна нулю (v = 0) и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
скорость равна нулю (v = 0) и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины: 
Таким образом, получаем, что механическая энергия гармонического осциллятора пропорциональна квадрату амплитуды колебаний.
В положении равновесия, когда х = 0, вся энергия осциллятора переходит в кинетическую энергию груза: 
где  — максимальная скорость при колебаниях.
— максимальная скорость при колебаниях.
В промежуточных точках полная энергия равна 
Отсюда можно вывести выражение для проекции скорости  груза в точке с координатой х:
груза в точке с координатой х:
Так как максимальная скорость 
Затухающие колебания. Вынужденные колебания. Резонанс
Как Вам уже известно, механическая энергия одномерного гармонического осциллятора пропорциональна квадрату амплитуды его колебаний. В любой реальной системе всегда присутствуют силы трения (сопротивления), поэтому механическая энергия системы с течением времени уменьшается, переходя во внутреннюю энергию. Вместе с тем убыль полной энергии означает и уменьшение амплитуды колебаний.
Колебания, происходящие с постоянной во времени амплитудой, называются незатухающими колебаниями.
Примерами таких колебаний служат колебания математического и пружинного маятников, происходящие в отсутствие сил трения.
Колебания, амплитуда которых уменьшается с течением времени вследствие потери энергии колебательной системой, называются затухающими колебаниями (рис. 186, а, б). 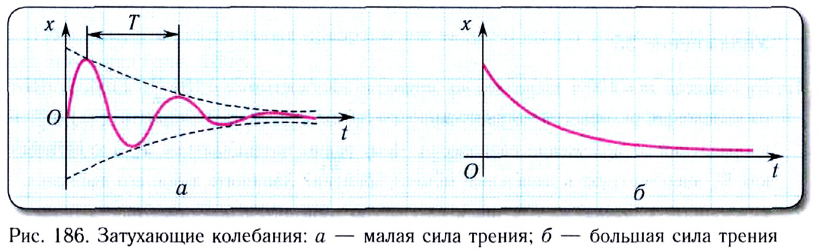
Уменьшение механической энергии системы (превращение ее в теплоту) происходит вследствие трения и сопротивления окружающей среды. Такие системы называют диссипативными (от латинского слова dissipation — рассеяние).
При малых потерях энергии колебания можно считать периодическими и пользоваться такими понятиями, как период и частота колебаний. Так, например, период — промежуток времени между двумя последовательными максимумами колеблющейся физической величины (см. рис. 186, а).
Незатухающие колебания, вызванные кратковременным внешним возбуждением, называются свободными или собственными. Они происходят под действием внутренних сил, возникающих в самой системе. Собственные колебания — это колебания, происходящие в отсутствии внешних воздействий на систему, со строго определенной частотой, называемой частотой собственных колебаний системы. Эта частота зависит только от параметров системы. Примерами таких колебаний могут служить колебания математического и пружинного маятников.
Любые собственные колебания в реальной системе рано или поздно затухают. Чтобы колебания не затухали, необходимо воздействие внешней силы. Однако не всякая внешняя сила заставляет систему двигаться периодически. Например, невозможно раскачать качели, если действовать на них с постоянной по модулю и направлению силой. Внешняя сила тоже должна быть периодической.
Колебания тел под действием внешней периодической силы (в частном
случае гармонической силы  в общем случае
в общем случае  называют вынужденными, а сила называется вынуждающей. Эксперименты показывают, что частота установившихся вынужденных колебаний всегда равна частоте вынуждающей силы.
называют вынужденными, а сила называется вынуждающей. Эксперименты показывают, что частота установившихся вынужденных колебаний всегда равна частоте вынуждающей силы.
Амплитуда колебаний и энергия, передаваемая системе за период вынужденных колебаний, зависят от того, насколько различаются частота вынуждающей силы  и частота собственных колебаний
и частота собственных колебаний  а также от величины трения в системе.
а также от величины трения в системе.
При вынужденных колебаниях возможно явление, называемое резонансом (от латинского слова resono — откликаюсь, звучу в ответ).
Резонанс — это явление резкого возрастания амплитуды вынужденных колебаний при действии на колебательную систему внешней силы с частотой, совпадающей с собственной частотой системы  (рис. 187).
(рис. 187). 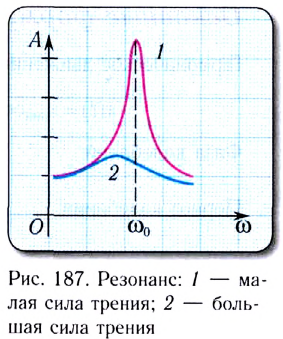
При резонансе создаются оптимальные условия для передачи энергии внешнего источника системе, так как в течение всего периода работа внешней силы источника над системой положительна. Вспомните процесс раскачивания на качелях: если качели толкать с очень большой частотой или с очень малой, их практически невозможно будет раскачать. Если же подбирать частоту толчков, близкую к частоте собственных колебаний качелей, то раскачивание будет эффективным.
Основные формулы:
Гармоническое движение: 
Фаза колебаний: 
Период колебания: 
Циклическая частота 

Уравнение гармонических колебаний:
Период колебаний пружинного маятника: 
Период колебаний математического маятника: 
Единицы измерения основных величин колебаний 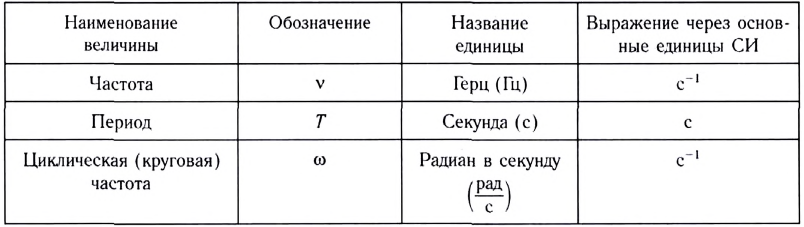
Колебательное движение и свободные колебания
Колебания — это любой процесс, в котором состояние тела или системы тел со временем повторяются. Колебания являются наиболее распространенной формой движения в природе.
Колебания — это любой процесс, повторяющийся во времени.
Колеблются деревья под действием ветра, поршни двигателя автомобиля под действием продуктов сгорания топлива. Мы можем разговаривать благодаря колебаниям голосовых связок гортани и слышать вследствие колебаний барабанных перепонок. Колебательным является биение сердца. C колебаниями связан и свет, который возникает при колебаниях молекул и атомов. C помощью электромагнитных колебаний, которые распространяются в пространстве, можно осуществлять радиосвязь, радиолокацию, лечить и диагностировать многие болезни.
В приведенных примерах колебаний на первый взгляд мало общего. Но при детальном исследовании приведенных примеров можно найти их общие свойства: различные по происхождению и природе колебания описываются одинаковыми уравнениями, имеют общие характеристики, это существенно облегчает их изучение и исследование.
Колебания бывают периодическими и непериодическими. Первые — это колебания, в которых состояние системы повторяются через одинаковые интервалы времени. В природе такие процессы практически не встречаются, но в теоретических исследованиях эти обобщения дают возможность вести продуктивные исследования.
Колебания, в которых состояние системы повторяется через одинаковые интервалы времени, называются периодическими.
Непериодические колебания не имеют постоянного периода колебаний и являются процессами, в которых состояние системы повторяется через произвольные и, как правило, неодинаковые интервалы времени. Такими, например, являются колебания веток дерева под действием порывов ветра.
Непериодические колебания не имеют постоянного периода колебаний.
Простейшими колебаниями являются так называемые гармонические колебания. Это колебания, в которых основные физические величины, касающиеся колебаний, изменяются по закону синуса или косинуса. Без изучения этих колебаний нельзя изучить более сложные колебания.
Колебания, в которых основные физические величины, касающиеся колебаний, изменяются по закону синуса или косинуса, называются гармоническими.
При изучении колебательных процессов для упрощения измерений и расчетов пользуются замкнутой системой, в которой тела взаимодействуют только в пределах определенной системы. Колебания, происходящие в замкнутой системе, называются свободными.
Примером свободных колебаний являются колебания пружинного маятника.
Пружинный маятник — это грузик некоторой массы т, укрепленный на конце пружины, которая в свою очередь укреплена неподвижно (рис. 3.1). Почему же этот маятник может колебаться? Отведем грузик от положения равновесия OO’ на расстояние +х. При этом согласно закону Гука возникнет сила упругости, которая будет действовать на тело в направлении равновесия: Fyпp = -kx.
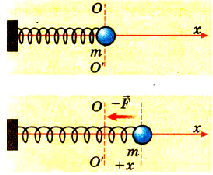
Рис. 3.1. Колебания пружинного маятника
Если освободить грузик, то он начнет двигаться до.положения равновесия с ускорением  . Согласно второму закону Ньютона
. Согласно второму закону Ньютона  .
.
В момент прохождения грузика через положение равновесия его скорость и кинетическая энергия будут максимальными (рис. 3.2).
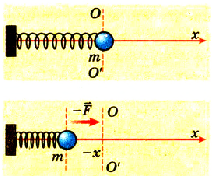
Рис. 3.2. Грузик движется влево
Имея определенную кинетическую энергию, грузик по инерции продолжает двигаться дальше (влево), выполняя работу по деформации пружины. Сила упругости, возникающая при этом, направлена к положению равновесия. Когда грузик окажется в крайнем левом положении, на него будет действовать сила упругости, направленная к положению равновесия (вправо). Под действием этой силы грузик начнет ускоренно двигаться до положения равновесия (вправо). Если предположить, что силы трения и сопротивления воздуха ничтожны, то процесс должен продолжаться бесконечно.
Записав совместно формулу второго закона Ньютона и закона Гука, получим уравнение движения грузика: 
Отсюда, 
В этом уравнении величина  всегда положительная, поскольку жесткость пружины и масса грузика не могут быть отрицательными. Поэтому эту величину обозначают символом
всегда положительная, поскольку жесткость пружины и масса грузика не могут быть отрицательными. Поэтому эту величину обозначают символом  , a уравнение движения тела па пружине записывают в виде
, a уравнение движения тела па пружине записывают в виде 
Общее уравнение колебаний: 
Решением этого уравнения является периодическая функция

где А — амплитуда колебаний; (ωt + а) — фаза;  — начальная фаза. Поскольку смещение грузика х происходит по закону синуса, то такие колебания являются гармоническими (рис. 3.3).
— начальная фаза. Поскольку смещение грузика х происходит по закону синуса, то такие колебания являются гармоническими (рис. 3.3).
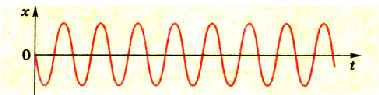
Puc. 3.3. График незатухающих гармонических колебаний
Воспользовавшись тем, что  получим формулу периода колебаний пружинного маятника:
получим формулу периода колебаний пружинного маятника: 
Кроме смещения по гармоническим законам, изменяются скорость и ускорение движения груза.
Поскольку в реальных условиях в каждой системе действуют силы трения и сопротивления, то амплитуда колебаний будет постепенно уменьшаться (рис. 3.4). 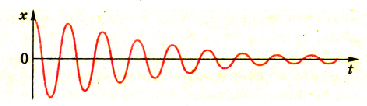
Puc. 3.4. График свободных колебаний
Свободные колебания в реальных условиях всегда затухающие, поскольку в каждой колебательной системе, действуют силы трения. Поэтому каждая следующая амплитуда колебаний будет меньше предыдущей. Если бы удалось создать идеальную систему, в которой не действуют силы трения, то колебания в этой системе были бы незатухающими. Поскольку такие идеализации применяются в физике для исследования колебаний, то частоту незатухающих колебаний в идеальной системе назвали собственной частотой.
Частоту колебаний в идеальной системе, в которой отсутствуют силы трения, называют собственной частотой.
Пример №3
Определить период колебаний грузика, который имеет массу 100 г и подвешен к пружине, коэффициент упругости которой 10 Н/м.
Дано:
m — 100 г,
k = 10 Н/м.
Решение
Для расчета периода колебаний пружинного маятника применяют формулу 
Подставив в эту формулу значения физических величин, получим 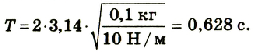
T — ?
Ответ: период колебаний пружинного маятника равен 0,628 с.
Колебательное движение и вынужденные колебания
Во многих технологических процессах происходят колебания, которые должны быть долговременными.
Поэтому создают условия для получения незатухающих колебаний. C этой целью в технических установках применяют вынужденные колебания. Это колебания, происходящие под действием внешней силы, которая периодически изменяется. Такими, например, являются колебания поршней в автомобильном двигателе, происходящие вследствие периодического действия газа во время рабочего хода поршня.
Вынужденными колебаниями является и переменный ток. который возникает в рамке, вращающейся в магнитном поле.
Частота вынужденных колебаний определяется частотой действия вынуждающей силы.
Регулируя подачу горючего в цилиндр, можно изменять частоту колебаний поршней. Частота переменного тока определяется скоростью вращения ротора турбины.
Особый интерес представляет случай, когда периодическая внешняя сила, действует па тело, которое может совершать свободные колебания.
Если в начальный момент тело было неподвижным, то после начала действия периодической силы оно начинает колебаться со все возрастающей амплитудой. Через некоторое время амплитуда устанавливается постоянной и в дальнейшем не возрастает.
Это происходит потому, что вся энергия, приходящая в колебательную систему, идет на выполнение работы по преодолению сил трения в системе. Если изменять частоту вынуждающей силы, то можно обнаружить явление резонанса. При частоте, равной собственной частоте колебаний системы, резко возрастает амплитуда. Сильно раскачать качели можно только в том случае, если подталкивать их будем «в такт» с частотой собственных колебаний качели. Явление резкого возрастания амплитуды вынужденных колебании называют резонансом.
Резонанс наступает тогда, когда частота действия вынуждающей силы будет равна собственной частоте колебаний системы.
fвын=fсоб
После повышения частоты выше резонансной амплитуда начнет убывать. Для каждой колебательной системы существует определенная частота, при которой наступает резонанс.
На рисунке 3.7 показана графическая зависимость амплитуды колебаний от частоты вынуждающей силы. Высота резонансной кривой, изображенной на этом рисунке, зависит от значения сил трения в колебательных системах. Так. график показывает, что резонансные частоты в трех колебательных системах одинаковые, но силы трения будут различными. Выше кривая меньше силы трения.
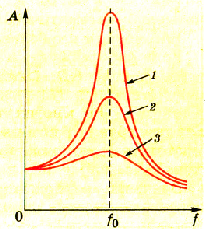
Рис. 3.7. Резонансные кривые для разных значений силы трения
C явлением резонанса мы встречаемся довольно часто и в быту, и в технике. Действие этого явления может быть как полезным, так и вредным. Так, чтобы выехать из лужи или песка, водитель с определенной частотой включает и выключает сцепление, раскачивая автомобиль. Увеличение амплитуды колебаний автомобиля содействует его выезду из выбоины.
Достоянием истории стала катастрофа с Бруклинским мостом в Нью-Йорке, который разрушился вследствие резонанса.
Колебательное движение и математический маятник
Одной из систем, которые могут совершать колебания, является нитяный маятник. Ото тело небольших размеров, подвешенное на длинной нерастяжёной нити. Выведенная из положения равновесия, эта система может совершать колебания.
Рассмотрим причины, вызывающие колебания в этой системе. Для удобства расчетов будем считать, что тело имеет размеры, намного меньшие длины нити, а отклонение от равновесия — небольшое. Маятник с такими ограничениями называют математическим.
Рассмотрим его более подробно.
Если система будет в равновесии, то на маятник будут действовать только сила тяжести и сила упругости нити. Их равнодействующая будет равна нулю (рис. 3.8). Естественно, что в таком случае шарик не будет двигаться.
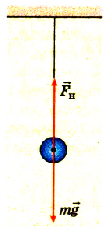
Рис. 3.8.Нитяный (математический) маятник в положении равновесия
Если груз вывести из положения равновесия, то равнодействующая F сил тяжести и упругости уже будет отличной от нуля (рис. 3.9).
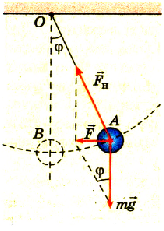
Pиc. 3.9. Равнодействующая сил тяжести и упругости направлена к положению равновесия
Значение равнодействующей определим по рисунку на основании анализа параллелограмма сил: 
При малом угле отклонения  , где l — длина подвеса; х -смещение тела от положения равновесия.
, где l — длина подвеса; х -смещение тела от положения равновесия.
Применим к описанию движения математического маятника второй закон Ньютона с учетом, что смещение груза направлено в сторону» противоположную равнодействующей:

Величина  всегда положительная. Поэтому ее можно обозначить
всегда положительная. Поэтому ее можно обозначить  . Тогда уравнение движения математического маятника будет иметь вид:
. Тогда уравнение движения математического маятника будет иметь вид:  .
.
Математический маятник совершает гармонические колебания по уравнению, решением которого является функция: х = Аsin(ωt + а).
Из курса математики известно, что решением этого уравнения является функция х =Asin(ωt + а). Поскольку эта функция гармоническая, то и колебания математического маятника называют гармоническими.
По уравнению движения математического маятника можно найти формулу для расчета периода и частоты колебаний математического маятника. Для этого будем учитывать, что величина, обозначенная какω0, является угловой частотой и равна  . Здесь f — частота колебаний, T — период колебаний. Из уравнения движения получим
. Здесь f — частота колебаний, T — период колебаний. Из уравнения движения получим  . Или, подставив значение угловой частоты:
. Или, подставив значение угловой частоты:  . Отсюда
. Отсюда 
Таким образом, период колебаний математического маятника зависит от длины подвеса и ускорения свободного падения.
Период колебаний математического маятника зависит от длины подвеса и ускорения свободного падения: 
Зависимость частоты колебаний математического маятника находят из соотношения
 ,
, 
Пример №4
Маятник длиной 150 см за 300 с совершает 122 колебания. Чему равно ускорение свободного падения?
Решение
При такой длине маятник можно считать математическим.
Связь между параметрами математического маятника
устанавливает формула для периода колебаний 
g -?
Согласно этой формуле 
Если учесть, что  а
а  то получим
то получим 
Подставив значения физических величин, получим

Ответ: ускорение свободного падения в этом случае составляет 9,78  .
.
Энергия колебательного движения
В механике различают кинетическую и потенциальную энергии. Кинетическая энергия определяется массой тела и его скоростью.
Потенциальную энергию тела в поле земного тяготения определяют по формуле En = mgh, потенциальную энергию упруго деформированного тела (например, пружины) по формуле  .
.
Если внимательно рассмотреть движение грузика на пружине (см. рис. 3.1 и 3.2), то здесь периодически будут изменяться как скорость тела, так и сила упругости пружины. Таким образом, периодически будут изменяться как кинетическая, так и потенциальная энергии. Кинетическая энергия будет максимальной в момент прохождения телом положения равновесия, когда его скорость будет максимальной. Потенциальная энергия приобретет максимальное значение через четверть периода, кода будет максимальным отклонение от положения равновесия.
До сих пор мы рассматривали случаи колебаний, пренебрегая потерями механической энергии. Для этого случая действует закон сохранения механической энергии: 
Соответственно этому закону максимальное значение потенциальной энергии будет при максимальном отклонении, когда кинетическая энергия (и скорость) равна нулю:
где А — максимальное отклонение тела от положения равновесия (амплитуда).
Если потери механической энергии в системе отсутствуют, то
Из последнего уравнения можно рассчитать скорость, с которой тело проходит положение равновесия.
Колебательное движение и механические волны
Колебания как процесс могут распространяться в пространстве. Для подтверждения этого подвесим на нити, закрепленной в штативе, несколько маятников и один из них приведем в колебательное движение (рис. 3.11).
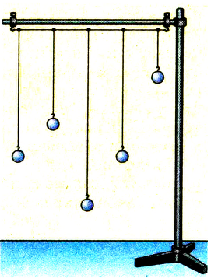
Рис. 3.11. Маятники на нити
Спустя некоторое время все маятники будут совершать колебания. Таким образом, механические колебания могут предаваться от одного тела к другому через упругие связи. Подобное происходит и в природе.
Если бросить камень в воду озера, то можно увидеть, как от него во все стороны распространяются круги-волны, в которых частицы воды колеблются в вертикальном направлении. Поплавок, плавающий рядом с точкой попадания камня, будет совершать только вертикальные колебания, не смещаясь в сторону. В данном случае происходит весьма сложный процесс. C одной стороны, частицы воды совершают колебания, перемещаясь в вертикальном направлении, а с другой — колебания распространяются в горизонтальном направлении. Но смещения частиц воды в горизонтальном направлении не происходит. Поэтому поплавок на воде хотя и колеблется, но к берегу не приближается.
Распространяются только колебания частиц воды — волны. Процесс распространения колебаний в упругой среде называют механической волной.
Как и любое другое физическое явление, волна имеет свои определенные характеристики.
Одной из величин, характеризующих волну, является скорость волны. Все известные науке волны распространяются не мгновенно, а на протяжении определенного времени, с определенной скоростью.
Каков же механизм образования волн?
Волна — процесс распространения колебаний.
Проанализировав рассмотренные ранее примеры, можно отметить, что механическая волна распространяется в упругой среде. Для того чтобы представить процесс распространения волны в упругой среде, промоделируем его с помощью шариков некоторой массы, соединенных между собой пружинками (рис. 3.12-а). Если сообщить определенный импульс левому крайнему шарику (рис. 3.12-б), то он начнет движение вверх, растягивая пружинку. Вследствие этого на второй шарик начнет действовать сила упругости растянутой пружинки, которая будет смещать шарик в том же направлении. Проявление инерции задержит движение второго шарика, который будет отставать от первого шарика (рис. 3.12-в).
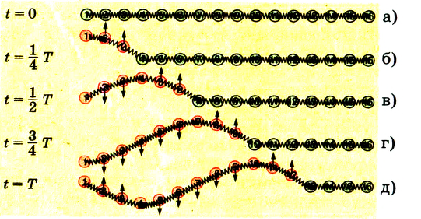
Pиc. 3.12. Модель процесса образования поперечной волны
Если первый шарик привести в колебательное движение, то второй также начнет колебаться, но с некоторым отставанием по фазе. Третий шарик под действием силы упругости второй пружинки также начнет колебаться, еще более отставая по фазе. В итоге все шарики будут колебаться с одинаковой частотой, но со сдвигом по фазе. При этом цепочкой побежит поперечная волна.
Если первому шарику придать импульс, направленный вдоль прямой, соединяющей оси шариков, то цепочкой распространится продольная волна. Ее можно наблюдать на длинной горизонтальной пружине, одним концом закрепленной на стене (рис. 3.13): после удара по торцу пружины образуются сгустки и разрежения витков, которые будут двигаться вдоль пружины как продольная волна.
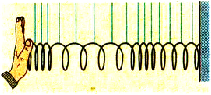
Pиc. 3.13. Распространение продольной волны
Если повторить модельный опыт образования волны в цепочке из пружинок и шариков (рис. 3.12), то можно заметить, что когда первый шарик проходит положение равновесия и движется вверх, то на определенном расстоянии от него существует шарик, который, проходя положение равновесия, также движется вверх, т. е. колебания совершаются в одной фазе.
Расстояние между двумя соседними точками волны, которые колеблются в одинаковой фазе, называют длиной волны (рис. 3.14). Например, это расстояние между двумя гребнями волны, образовавшейся от брошенного в воду камня. Длина волны обозначается буквой греческого алфавита λ (лямбда).
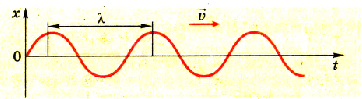
Puc. 3.14. Расстояние между двумя соседними точками волны. колеблющимися водной фазе
За один период она распространяется на расстояние, равное длине волны, Поэтому скорость распространения волны можно определить через эти величины:

Длина волны равна произведению скорости распространения на период: λ = υT.
Так как период связан с частотой формулой
Возможно иное определение длины волны: это расстояние, на которое распространяется волна за один период.
Длина волны является универсальной характеристикой для волновых процессов различной природы.
Пример №5
Лодка качается на волнах, распространяющихся со щ скоростью 2,5 м/с. Расстояние между гребнями волн 2,5 м. Найти период колебаний лодки.
Отсюда 
Подставив значения физических величин, получим
Oтвет: период колебания лодки 3,2 с.
Колебательное движение и звуковые волны
Звук сопровождает человека на протяжении всей жизни. Он является основным средством общения между людьми, его используют в различных технологических процессах. Как вы знаете, источником звука является колеблющееся тело. Колеблются ножки камертона, излучая звук определенного тона, диффузор громкоговорителя, воссоздавая голос человека или звучание музыкального инструмента. Распространение этих колебаний и воспринимается нами как звук.
Звук является продольной волной, которая распространяется только в упругой среде, в частности в воздухе, воде, металлах, дереве, пластмассе и т. п.
Роль воздуха в распространении звука впервые была раскрыта в 1660 г. английским физиком Р. Бойлем, который открыл, что под колпаком вакуумного насоса, если из-под него выкачан воздух, звук не распространяется.
Звук начали исследовать очень давно. Поэтому для его характеристики применяют специфические величины. Так, высота тона, о которой говорят музыканты, обозначает частоту колебаний: чем больше частота, тем выше тон. Громкость звука связана с амплитудой колебаний: чем больше амплитуда, тем громче звук.
Звуковые волны имеют свойство отражаться от препятствий. Если звуковая волна падает на сплошное препятствие (стену, гору), то она отражается, и мы слышим эхо. Свойство отражаться используют инженеры создавая приборы для определения глубины воды под днищем корабля. Его назвали эхолотом, или эхолокатором (рис. 3.15).

Puc. 3.15. Схема объясняющая принцип действия эхолокатора
Излучатель посылает узкий импульсный пучок звуковых волн в сторону дна, я специальный микрофон улавливает отраженный сигнал. Измеряя интервал времени между посылкой и приемом сигнала, специальная аппаратура определяет расстояние до дна.
Человек слышит .звук только в определенном диапазоне частот. Считается, что человеческое ухо чувствительно к колебаниям частотой от 20 Гц до 20 кГц. Волны с частотой свыше 20 кГц называют ультразвуковыми^ а с частотой меньше 20 Гц — инфразвуковыми. Ни одни ни другие звуки человек не слышит. Но свойства этих волн используют в различных приборах и устройствах. Так, ультразвук применяют для стерилизации продуктов питания, очистки поверхности металлов и пластмасс от загрязнений, медицинских инструментов и приборов, пе выдерживающих высоких температур. В медицине используют ультразвуковые аппараты для исследований внутренних органов. Последнее время применяется ультразвуковой хирургический инструмент, позволяющий проводить бескровные операции.
Инфразвуки н целом отрицательно действуют на живой организм. Поэтому необходимо устранять их источники или применять профилактические меры безопасности. Так, на производствах, где производственные технологии связаны с применением мощных низкочастотных колебаний, используют различные средства изоляции рабочих от их воздействия. Например, известны случаи, когда установка нового мощного вентилятора не повысила производительности труда рабочих, а наоборот, повысила их утомляемость.
Колебательный контур и возникновение электромагнитных колебаний в колебательном контуре
Кроме механических колебаний, н природе существуют электромагнитные колебания. Они возникают в системе, которая называется колебательным контуром. Это электрическая цепь, состоящая из катушки индуктивности и конденсатора, соединенных между собой параллельно (рис. 3.16).
Колебательный контур — это электрическая цепь, состоящая из параллельно соединенных катушки индуктивности и конденсатора.
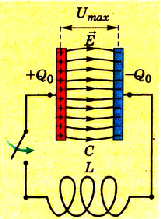
Pиc. 3.16. Cxerna колебательного контура
Обычно сопротивление проводников в такой цепи незначительно. Для получения колебаний в колебательном контуре сначала заряжают конденсатор, сообщая ему заряд Q0. Тогда в начальный момент времени между обкладками конденсатора возникает электрическое поле. Полная энергия контура в это время равна энергии заряженного конденсатора:
где Q0 — заряд конденсатора; C — его электроемкость.
При замыкании ключа конденсатор начинает разряжаться и в контуре возникает возрастающий по значению ток. Вследствие разряда конденсатора энергия электрического поля уменьшается; она превращается в энергию магнитного поля катушки, по которой проходит ток I:

где I — сила тока; L — индуктивность катушки.
В идеальном колебательном контуре полная энергия сохраняется и остается равной энергии электрического поля конденсатора после его зарядки. В любой произвольный момент времени она равна сумме энергий электрического поля конденсатора и магнитного поля катушки:
В момент времени, когда конденсатор полностью разрядится, энергия электрического поля становится равной нулю, а энергия магнитного поля достигает максимального значения:
После этого сила тока в контуре начинает уменьшаться, Уменьшается и магнитный поток. По закону электромагнитной индукции, изменению тока противодействует ЭДC самоиндукции, которая возникает при изменении магнитного потока. Поэтому конденсатор начинает перезаряжаться, и между его обкладками Снова возникает электрическое поле.
Когда перезарядка прекратится, на обкладках конденсатора будет заряд, равен первоначальному, по с противоположным знаком.
В дальнейшем процесс повторяется, но в обратном направлении. Через определенное время система возвращается в первоначальное положение, и начинается самопроизвольный цикл периодической зарядки и перезарядки конденсатора че- рез катушку. При отсутствии потерь па нагревание проводников и излучение колебания в колебательном контуре будут незатухающими.
В реальных условиях колебания в колебательном контуре будут затухающими. Поэтому их нужно считать свободными. Их период и частота зависят от параметров колебательного контура емкости конденсатора и индуктивности катушки. Выдающийся английский физик В. Томсон установил, что 
 |
Уильям (Кельвин) Томсон (1824-1907) — выдающийся английский физик. Его научные труды касаются многих вопросов физики, математики и техники. Он широко применял термодинамический метод для объяснения физических явлений; продуктивно работал в области изучения электрических и магнитных явлений: известны его работы по теплопроводимости. |
Если колебательный контур включить в электрическую цепь переменного тока, то в нем возникнут вынужденные колебания, частота которых будет равна частоте переменного тока. Их амплитуда будет зависеть от сопротивления проводников контура и от соотношения между частотой переменного тока и собственной частотой контура. В случае совпадения этих частот в контуре будут возникать колебания, амплитуда которых резко возрастает. Таким образом, в колебательном контуре будет появляться резонанс. Это явление используют в радиоприемниках, когда с помощью настройки контура на определенную частоту’ принимают сигналы определенной станции. Изменяя индуктивность катушки или емкость конденсатора, мы изменяем собственную частоту контура. Если собственная частота контура совпадает с частотой определенного сигнала, в контуре, благодаря резонансу, возникает значительный ток, который передается в специальное устройство для дальнейшего усиления и обработки.
Образование электромагнитных волн
Электромагнитные колебания распространяются в пространстве в виде электромагнитных волн. В них происходят взаимные превращения электрического и магнитного полей, которые вместе образуют электромагнитное поле, распространяющееся в пространстве.
Процесс распространения электромагнитных колебаний называется электромагнитной волной.
Для образования электромагнитных волн, как и волн любой природы, необходимо иметь систему, в которой возникают электромагнитные колебания. Для электромагнитных колебаний такой системой будет колебательный контур, состоящий из конденсатора и катушки индуктивности.
Современные электронные системы позволяют поддерживать в нем незатухающие колебания на протяжении длительного времени, что в свою очередь создает условия для длительного излучения электромагнитных волн. По этому принципу работают вещательные радиостанции, телевидение и другие средства связи.
Однако сам по себе колебательный контур не может излучать электромагнитные волны, поскольку электрическое поле сосредоточено между обкладками конденсатора и вне контура не проявляется.
Переменные магнитные поля сосредоточены в основном внутри катушки и не распространяются за пределы контура. Исследования показали, что электромагнитные волны могут излучаться в пространство только открытым колебательным контуром, который в простейшем виде состоит из двух линейных проводников, связанных друг с другом катушкой индуктивности (рис. 3.17).

Рис. 3.17. Открытый колебательный контур
Для возбуждения электромагнитных колебаний в открытом контуре существуют различные способы. Наиболее распространенный из них способ, когда катушка индуктивности открытого контура образует индуктивную связь с контуром генератора незатухающих колебаний (рис. 3.18).
Рис. 3.17. Связь открытого контура с контуром генератора
Благодаря электромагнитной индукции в катушке открытого колебательного контура Le появляется переменная ЭДС, возбуждающая в проводниках переменный ток. Поскольку электроны, образующие переменный ток в проводниках, движутся ускоренно, то проводники открытого колебательного контура имеют переменное электромагнитное ноле.
Открытый колебательный контур, в котором происходят электромагнитные колебания, имеет переменные магнитное и электрическое поля. Так, переменное электрическое поле открытого колебательного контура индуцирует «собственное» переменное магнитное поле.
Переменное электрическое поле открытого колебательного контура будет индуцировать «собственное» переменное магнитное поле.
Индуцированное переменное мигни гное поле, в свою очередь, будет возбуждать индуцированное электрическое поле.
Таким образом, индукционные процессы будут охватывать все новые и новые точки, а обрадовавшееся
электромагнитное поле будет распространяться в пространстве. На расстоянии нескольких длин волны от открытого колебательного контура в пространстве уже будет распространяться единая электромагнитная волна, в которой будут происходить взаимообусловленные одновременные изменения электрического и магнитного полей — составляющих электромагнитного поля.
Графически электромагнитную волну можно изобразить в виде двух синусоид, расположенных во взаимно перпендикулярных плоскостях (рис. 3.19).
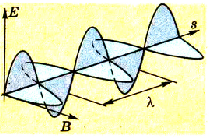
Puc. 3.19. Графическое изображение электромагнитные волны
Этот рисунок показывает существующую зависимость значений векторов напряженности электрического поля E и магнитной индукции В от расстояния в направлении распространения волны. По направлению эти векторы органически связаны между собой и с вектором скорости распространения волны  . Их колебания происходят во взаимно перпендикулярных плоскостях, причем вектор скорости
. Их колебания происходят во взаимно перпендикулярных плоскостях, причем вектор скорости  всегда перпендикулярен к плоскости колебаний векторов E и В, а его направление определяется по правилу правого винта.
всегда перпендикулярен к плоскости колебаний векторов E и В, а его направление определяется по правилу правого винта.
Если правый винт вращать в направлении от вектора E к вектору В кратчайшим путем, то его поступательное движение покажет направление вектора скорости
Аналитически колебательный процесс, которым является электромагнитная волна, представляется двумя уравнениями для модулей векторов Е и В:
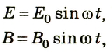
где B0 и E0 — амплитуды волны; t — время наблюдения;  циклическая частота.
циклическая частота.
Таким образом, распространение электромагнитных волн происходит как возбуждение связанных между собой электрического и магнитного переменных полей в направлении, определяемом по правилу правого винта.
Шкала электромагнитных излучений
Во время исследований, длительное время проводившихся учеными, не обнаружили каких-либо ограничений относительно частоты или длины электромагнитного излучения. Т. е. нет смысла вести речь о самой короткой или самой длинной волне, ограничивая диапазон электромагнитных волн. Речь может быть лишь об определенном диапазоне воли, открытых и исследованных современной наукой.
Для наглядного представления о разнообразии электромагнитных излучений и зависимости их свойств от длины волны составлена шкала, один из вариантов которой представлен на форзаце. Они расположены по определенным условным диапазонам, не имеющим четких границ: низкочастотные волны, радиоволны, инфракрасное излучение, видимый свет, ультрафиолетовое, рентгеновское и гамма-излучение. Такое деление произведено с учетом природы их возникновения и особенностей взаимодействия с веществом. Например, если радиоволны образуются электромагнитными колебаниями, возбуждаемыми в колебательном контуре определенной емкости и индуктивности, чем и определяется длина волны, то гамма-излучение возникает как следствие ядерных процессов, связанных с радиоактивным распадом.
Существуют также отличия и во взаимодействии электромагнитных волн с веществом и в особенностях распространения в пространстве. Если видимый свет полностью поглощается топким слоем бумаги, то рентгеновское и гамма-излучения могут проникать не только через человеческое тело, но и через металлы.
Рассмотрим шкалу электромагнитного излучения подробнее.
Низкочастотное излучение возникает в результате работы различных электротехнических устройств и приборов, в которых используется переменный ток низкой частоты. Оно имеет низкую энергию и до сих пор не нашло практического применения ни в информационных, ни в энергетических технологиях.
Радиоволны разделены на диапазоны длинных, средних, коротких и ультракоротких волн. Поводом для такого деления послужили особенности их распространения.
В широком диапазоне радиоволны делятся на длинные, средние, короткие и ультракороткие.
Инфракрасное излучение называют также тепловым, так как оно наблюдается у всех нагретых тел.
В широком понимании оптический диапазон охватывает инфракрасное излучение, видимый свет и ультрафиолетовое излучение. Инфракрасное излучение лежит за пределами восприятия глазом волн, длина которых больше 760 нм и простилается к 0,1 мм. Их излучают все нагретые тела, благодаря чему мы ощущаем теплоту. При повышении температуры длина волны, на которую приходится максимум излучения, смещается в область более коротких волн. Инфракрасное излучение слабо поглощается воздухом и хорошо отражается от поверхности твердых тел. Это их свойство применяют в приборах «ночного видения».
Видимый свет — это тот диапазон волн, который воспринимается человеческим глазом. Установлено, что он довольно узкий, от 380 им до 760 нм. Волны различной длины этого диапазона воспринимаются как свет различных цветов. Свойства света очень разнообразны, многие из них станут вам понятны только после изучения последующих параграфов.
Со стороны коротковолновой части диапазона видимых волн находится диапазон ультрафиолетового излучения, которое не воспринимается человеческим глазом. Вместе с тем, взаимодействуя с веществом, это излучение может вызывать излучение видимого света. Нм этом основан метод неразрушающего анализа вещества, когда по цвету излучения определяют наличие тех или иных веществ в смеси. Широко известен способ применения ультрафиолетового излучения для выявления фальшивых денежных купюр.
Ультрафиолетовое излучение практически полностью поглощается обычным оконным стеклом.
Ультрафиолетовое излучение имеет сильное бактерицидное действие, его широко применяют для стерилизации, медицинских инструментов, различных медицинских материалов. Невозможно представить больничную палату без ламп, излучающих ультрафиолетовый свет.
Вместе с тем ультрафиолетовое излучение может отрицательно воздействовать на человеческий организм, попадая на кожу или слизистую оболочку. Оно вызывает ожоги, которые плохо поддаются лечению.
Рентгеновское излучение известно многим из нас как средство медицинского исследования организма. Впервые его получил и исследовал известный физик, украинец по происхождению И. Пулюй (1845-1918). Но случилось так, что первым сообщил об открытии немецкий физик В. Рентген (1845-1928). За это открытие ему позднее была присуждена Нобелевская премия в области физики.
Рентгеновское излучение имеет высокую проницательную способность, оно может проникать сквозь толстые слои вещества и даже металлов. Его используют в промышленности для выявления внутренних дефектов металлических изделий, в медицине для исследования внутренних органон человека, в научных исследованиях строения вещества.
Следующий диапазон — гамма-излучение — относится к ядерным процессам и связан с процессами, происходящими в атомных ядрах.
Радиоволны
Радиоволны принадлежат к диапазону электромагнитных ноли длиной от нескольких километров до нескольких десятков километров. В высокочастотной области диапазона радиоволны плавно переходят в инфракрасное излучение, хотя четкая граница не установлена. В своей низкочастотной части диапазона радиоволны граничат с низкочастотным излучением, которое образуется при работе электротехнических устройств, использующих переменный ток низкой частоты.
Радиоволны имеют четыре диапазона: длинные (λ = 10 4 . 10 3 м), средние (λ = 10 3 . 102 м), короткие (λ =10 2 . 10 м) и ультракороткие (λ 4 . 10 3 м), средние (10 3 -10 2 м), короткие (10 2 . 10 м) и ультракороткие ( 4 м (длинные волны); инфракрасное излучение, длина волны которого лежит в пределах от 0,1 мм до 760 нм; видимый свет с длиной волны от 380 до 760 пм; ультрафиолетовое излучение, длина волны которого лежит в пределах от фиолетовой части видимого света до нескольких нанометров; рентгеновское излучение в диапазоне длин волн от 10 -8 до 10 -11 м; гамма-излучение, имеющее длину волны меньше 10 -11 м.
Справочный материал по колебательному движению
Еще в древности люди, наблюдая за Солнцем и Луной, определили единицы времени: год, месяц, сутки и др. Были созданы солнечные часы, затем водяные, огневые, песочные. Однако настоящая революция в конструкции часов произошла после выяснения свойств колебательного движения.
Подвесим груз на нить, отклоним его от положения равновесия и отпустим. Груз начнет колебаться, то есть двигаться от одного крайнего положения к другому, повторяя это движение через некоторый интервал времени. Таким образом, колебательное движение имеет важную общую черту с равномерным движением по окружности: оба движения являются периодическими (рис. 13.1).
Изучаем маятники:
Груз, колеблющийся на нити или на пружине, — пример простейшего маятника.
Маятник — это твердое тело, которое совершает колебания вследствие притяжения к Земле или в результате действия пружины. Маятники используют во многих физических приборах. Особенно важным является использование маятников в часах: периодичность колебаний дает возможность осуществлять отсчет времени. Маятники, колеблющиеся благодаря действию пружины, называют пружинными маятниками (рис. 13.2). Колебания пружинного маятника зависят от свойств пружины и массы тела. Маятники, колеблющиеся благодаря притяжению к Земле, называют физическими маятниками (рис. 13.3). Их колебания достаточно сложны, поскольку зависят от массы, геометрических размеров, формы маятника и т. д. Чтобы размеры и форма тела не влияли на его колебания, нужно взять нить, длина которой достаточно велика по сравнению с размерами тела, — в таком случае тело можно считать материальной точкой. При этом нить должна быть легкой и довольно тонкой, а чтобы во время колебаний тело было на неизменном расстоянии от точки подвеса, — нерастяжимой. Небольшой металлический шарик диаметром 1–2 см, подвешенный на тонкой нерастяжимой нити длиной 1–2 м, вполне может служить маятником, на колебания которого не будут влиять размеры, масса тела и свойства нити (рис. 13.4)*. Такой маятник называют нитяным.
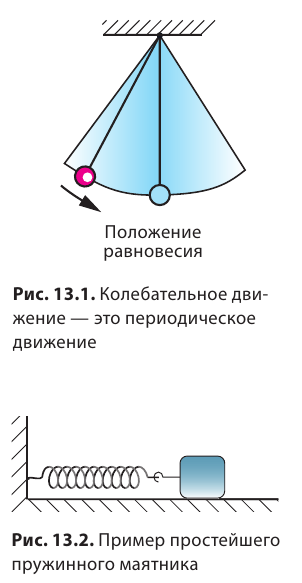
Что такое амплитуда колебаний
Наблюдая за колебаниями маятника, нетрудно заметить, что есть определенное максимальное расстояние, на которое колеблющееся тело удаляется от положения равновесия. Это расстояние называют амплитудой колебаний (рис. 13.5).
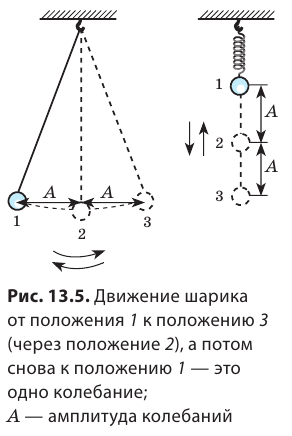
Амплитуда колебаний — это физическая величина, равная максимальному расстоянию, на которое отклоняется тело от положения равновесия во время колебаний. Амплитуду колебаний обозначают символом A. Единица амплитуды колебаний в СИ — метр: [A]= м. За одно колебание тело проходит путь  который примерно равен четырем амплитудам:
который примерно равен четырем амплитудам:  4 Определяем период и частоту колебаний
4 Определяем период и частоту колебаний
Колебательное движение является периодическим движением, поэтому оно характеризуется такими физическими величинами, как период колебаний и частота колебаний.
В данном случае длина нити считается также длиной маятника.
В случае с нитяным маятником данное равенство является приблизительным, так как тело движется по дуге окружности, длина которой больше расстояния, называемого амплитудой колебаний. Но если амплитуда колебаний мала (намного меньше длины маятника), этим различием обычно пренебрегают.
Период колебаний — это физическая величина, равная времени, за которое происходит одно колебание. Период колебаний, как и период равномерного движения по окружности, обозначают символом T и вычисляют по формуле:  , где t — время наблюдения; N — количество колебаний за это время. Единица периода колебаний в СИ — секунда: [T]= с.
, где t — время наблюдения; N — количество колебаний за это время. Единица периода колебаний в СИ — секунда: [T]= с.
Частота колебаний — это физическая величина, которая равна количеству колебаний за единицу времени. Частоту колебаний обозначают символом ν («ню») и вычисляют по формуле:  Единица частоты колебаний в СИ — герц ( Г ц ) ; названа так в честь Генриха Герца (рис. 13.6). Если тело за одну секунду осуществляет одно колебание, то частота его колебаний равна одному герцу:
Единица частоты колебаний в СИ — герц ( Г ц ) ; названа так в честь Генриха Герца (рис. 13.6). Если тело за одну секунду осуществляет одно колебание, то частота его колебаний равна одному герцу:  Частота ν и период T колебаний — взаимно обратные величины:
Частота ν и период T колебаний — взаимно обратные величины:  У маятников есть очень важное свойство: если амплитуда колебаний маятника намного меньше его длины, то частота и период колебаний маятника не зависят от амплитуды колебаний. Это свойство малых колебаний открыл Галилео Галилей*, и именно оно лежит в основе работы механических часов.
У маятников есть очень важное свойство: если амплитуда колебаний маятника намного меньше его длины, то частота и период колебаний маятника не зависят от амплитуды колебаний. Это свойство малых колебаний открыл Галилео Галилей*, и именно оно лежит в основе работы механических часов.
Различия затухающих от незатухающих колебаний
Выведем качели из состояния равновесия и отпустим. Качели начнут колебаться. Такие колебания называют свободными. Если на качели не влиять, то через некоторое время амплитуда их колебаний заметно уменьшится, а со временем колебания прекратятся вовсе. Колебания, амплитуда которых со временем уменьшается, называют затухающими колебаниями.
Свободные колебания всегда являются затухающими. Затухают с течением времени свободные колебания языка колокола, струны гитары, ветки дерева. Что следует сделать, чтобы амплитуда колебаний качелей со временем не уменьшалась, то есть чтобы их колебания были незатухающими? Незатухающие колебания — это колебания, амплитуда которых не изменяется со временем. Незатухающие колебания осуществляет, например, игла швейной машины, пока работает ее механизм (рис. 13.7).

Пример №6
Небольшой тяжелый шарик, подвешенный на нерастяжимой нити длиной 1 м, отклонили от положения равновесия и отпустили. За 30 с шарик совершил 15 колебаний. Какое расстояние пройдет шарик за 36 с, если амплитуда его колебаний — 5 см? Колебания считайте незатухающими. Анализ физической проблемы. Амплитуда колебаний намного меньше длины нити, поэтому можно считать, что за одно колебание шарик проходит путь, равный четырем амплитудам (4A). Если определить количество колебаний за 36 с, то можно найти расстояние, которое прошел шарик. Количество колебаний найдем, определив время одного колебания, то есть период колебаний.
 ,
, ,
, ,
, .
.

Решение:
Найдем период колебаний:
Найдем количество колебаний за 36 с:
Определим расстояние, которое проходит шарик за одно колебание: 
Определим путь, который пройдет шарик за 36 с: 
Анализ результатов. За одно колебание шарик проходит 20 см; время колебаний больше периода колебаний, поэтому пройденное шариком расстояние будет больше 20 см. Следовательно, результат правдоподобен.
Ответ: 
Итоги:
Колебательное движение (колебания) — периодическое движение. Различают затухающие и незатухающие колебания. Амплитуда А колебаний — это физическая величина, равная максимальному расстоянию, на которое тело отклоняется от положения равновесия во время колебаний. Период Т колебаний — это физическая величина, равная времени, за которое происходит одно колебание:  . Единица периода колебаний в СИ — секунда (с). Частота ν колебаний — это физическая величина, равная количеству колебаний за единицу времени:
. Единица периода колебаний в СИ — секунда (с). Частота ν колебаний — это физическая величина, равная количеству колебаний за единицу времени:  . Единица частоты колебаний в СИ — герц (Гц). Частота и период колебаний — взаимно обратные величины:
. Единица частоты колебаний в СИ — герц (Гц). Частота и период колебаний — взаимно обратные величины: 
«Механическое движение»:
Вы изучали механическое движение и его характеристики, узнали о видах механического движения: прямолинейное движение, движение по окружности, колебательное движение.
Вы ознакомились с некоторыми основными понятиями механики.

Вы научились различать виды механического движения.
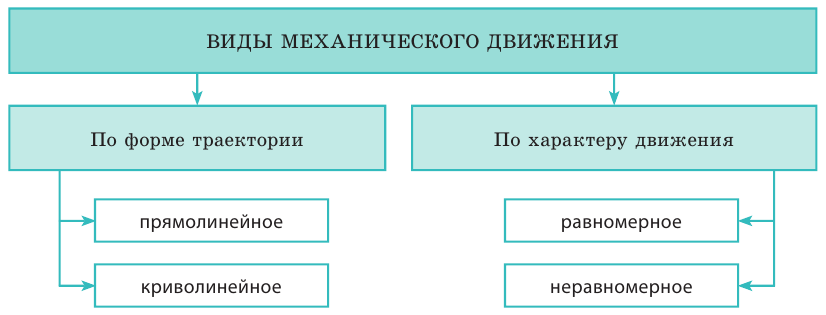
Вы научились исследовать равномерное движение с помощью графиков пути и графиков скорости движения.
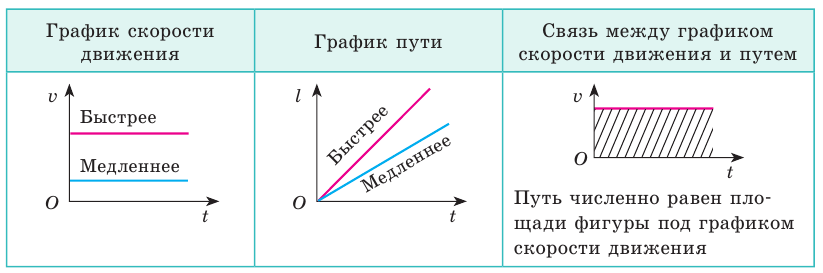
Вы исследовали некоторые механические движения.
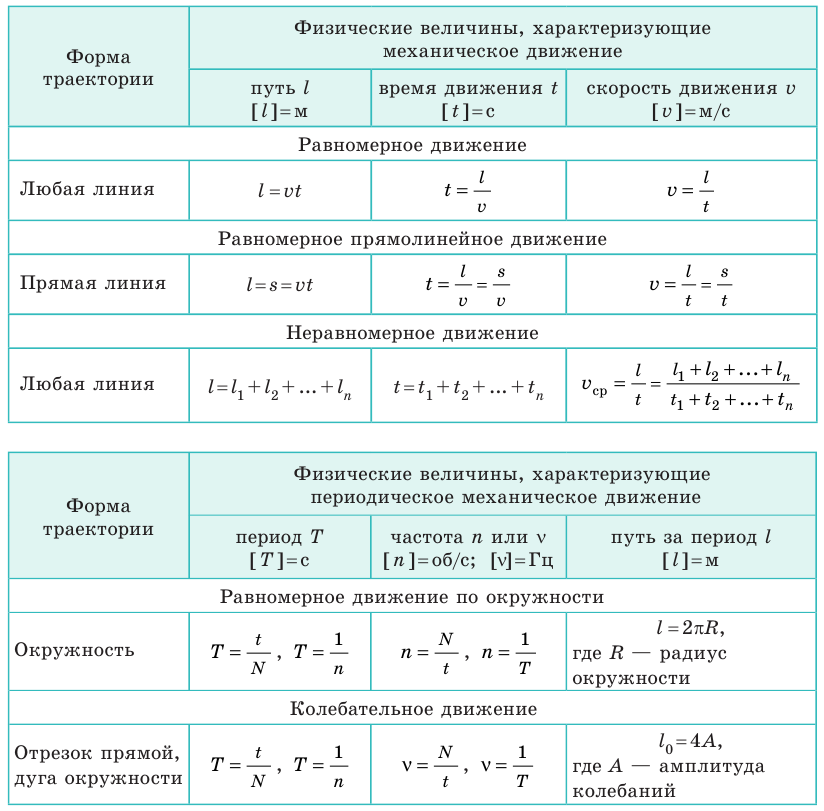
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Физический и математический маятники
- Пружинные и математические маятники
- Скалярные и векторные величины и действия над ними
- Проекция вектора на ось
- Равномерное движение
- Неравномерное движение
- Вращательное движение тела
- Равномерное движение материальной точки по окружности
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://skysmart.ru/articles/physics/garmonicheskie-kolebaniya
http://www.evkova.org/kolebatelnoe-dvizhenie-v-fizike
Чтобы описать колебательные процессы и отличить одни колебания от других, используют 6 характеристик. Они называются так (рис. 1):
- амплитуда,
- период,
- частота,
- циклическая частота,
- фаза,
- начальная фаза.

Рис. 1. Основные характеристики колебаний – это амплитуда, период и начальная фаза
Такие величины, как амплитуду и период, можно определить по графику колебаний.
Начальную фазу, так же, определяют по графику, с помощью интервала времени (large Delta t), на который относительно нуля сдвигается начало ближайшего периода.
Частоту и циклическую частоту вычисляют из найденного по графику периода, по формулам. Они находятся ниже в тексте этой статьи.
А фазу определяют с помощью формулы, в которую входит интересующий нас момент времени t колебаний. Читайте далее.
Что такое амплитуда
Амплитуда – это наибольшее отклонение величины от равновесия, то есть, максимальное значение колеблющейся величины.
Измеряют в тех же единицах, в которых измерена колеблющаяся величина. К примеру, когда рассматривают механические колебания, в которых изменяется координата, амплитуду измеряют в метрах.
В случае электрических колебаний, в которых изменяется заряд, ее измеряют в Кулонах. Если колеблется ток – то в Амперах, а если – напряжение, то в Вольтах.
Часто обозначают ее, приписывая к букве, обозначающей амплитуду индекс «0» снизу.
К примеру, пусть колеблется величина ( large x ). Тогда символом ( large x_{0} ) обозначают амплитуду колебаний этой величины.
Иногда для обозначения амплитуды используют большую латинскую букву A, так как это первая буква английского слова «amplitude».
С помощью графика амплитуду можно определить так (рис. 2):

Рис. 2. Амплитуда – это максимальное отклонение от горизонтальной оси либо вверх, либо вниз. Горизонтальная ось проходит через уровень нуля на оси, на которой отмечены амплитуды
Что такое период
Когда колебания повторяются точно, изменяющаяся величина принимает одни и те же значения через одинаковые кусочки времени. Такой кусочек времени называют периодом.
Обозначают его обычно большой латинской буквой «T» и измеряют в секундах.
( large T left( c right) ) – период колебаний.
Одна секунда – достаточно большой интервал времени. Поэтому, хотя период и измеряют в секундах, но для большинства колебаний он будет измеряться долями секунды.
Чтобы по графику колебаний определить период (рис. 3), нужно найти два одинаковых значения колеблющейся величины. После, провести от этих значений к оси времени пунктиры. Расстояние между пунктирами – это период колебаний.

Рис. 3. Период колебаний – это горизонтальное расстояние между двумя похожими точками на графике
Период – это время одного полного колебания.
На графике период найти удобнее одним из таких способов (рис. 4):

Рис. 4. Удобно определять период, как расстояние между двумя соседними вершинами, либо между двумя впадинами
Что такое частота
Обозначают ее с помощью греческой буквы «ню» ( large nu ).
Частота отвечает на вопрос: «Сколько полных колебаний выполняется за одну секунду?» Или же: «Сколько периодов умещается в интервал времени, равный одной секунде?».
Поэтому, размерность частоты — это единицы колебаний в секунду:
( large nu left( frac{1}{c} right) ).
Иногда в учебниках встречается такая запись ( large displaystyle nu left( c^{-1} right) ), потому, что по свойствам степени ( large displaystyle frac{1}{c} = c^{-1} ).
Начиная с 1933 года частоту указывают в Герцах в честь Генриха Рудольфа Герца. Он совершил значимые открытия в физике, изучал колебания и доказал, что существуют электромагнитные волны.
Одно колебание в секунду соответствует частоте в 1 Герц.
[ large displaystyle boxed{ frac{ 1 text{колебание}}{1 text{секунда}} = 1 text{Гц} }]
Чтобы с помощью графика определить частоту, нужно на оси времени определить период. А затем посчитать частоту по такой формуле:
[ large boxed{ nu = frac{1}{T} }]
Существует еще один способ определить частоту с помощью графика колеблющейся величины. Нужно отмерить на графике интервал времени, равный одной секунде, и сосчитать количество периодов колебаний, уместившихся в этот интервал (рис. 5).

Рис. 5. На графике частота – это количество периодов, уместившихся в одну секунду
Что такое циклическая частота
Колебательное движение и движение по окружности имеют много общего – это повторяющиеся движения. Одному полному обороту соответствует угол (large 2pi) радиан. Поэтому, кроме интервала времени 1 секунда, физики используют интервал времени, равный (large 2pi) секунд.
Число полных колебаний для такого интервала времени, называется циклической частотой и обозначается греческой буквой «омега»:
( large displaystyle omega left( frac{text{рад}}{c} right) )
Примечание: Величину ( large omega ) так же называют круговой частотой, а еще — угловой скоростью (ссылка).
Циклическая частота отвечает на вопрос: «Сколько полных колебаний выполняется за (large 2pi) секунд?» Или же: «Сколько периодов умещается в интервал времени, равный (large 2pi) секунд?».
Обычная ( large nu ) и циклическая ( large omega ) частота колебаний связаны формулой:
[ large boxed{ omega = 2pi cdot nu }]
Слева в формуле количество колебаний измеряется в радианах на секунду, а справа – в Герцах.
Чтобы с помощью графика колебаний определить величину ( large omega ), нужно сначала найти период T.
Затем, воспользоваться формулой ( large displaystyle nu = frac{1}{T} ) и вычислить частоту ( large nu ).
И только после этого, с помощью формулы ( large omega = 2pi cdot nu ) посчитать циклическую ( large omega ) частоту.
Для грубой устной оценки можно считать, что циклическая частота превышает обычную частоту примерно в 6 раз численно.
Определить величину ( large omega ) по графику колебаний можно еще одним способом. На оси времени отметить интервал, равный (large 2pi), а затем, сосчитать количество периодов колебаний в этом интервале (рис. 6).

Рис. 6. На графике циклическая (круговая) частота – это количество периодов, уместившихся в 2 пи секунд
Что такое начальная фаза и как определить ее по графику колебаний
Отклоним качели на некоторый угол от равновесия и будем удерживать их в таком положении. Когда мы отпустим их, качели начнут раскачиваться. А старт колебаний произойдет из угла, на который мы их отклонили.
Такой, начальный угол отклонения, называют начальной фазой колебаний. Обозначим этот угол (рис. 7) какой-нибудь греческой буквой, например, (large varphi_{0} ).
(large varphi_{0} left(text{рад} right) ) — начальная фаза, измеряется в радианах (или градусах).
Начальная фаза колебаний – это угол, на который мы отклонили качели, перед тем, как их отпустить. Из этого угла начнется колебательный процесс.

Рис. 7. Угол отклонения качелей перед началом колебаний
Рассмотрим теперь, как величина (large varphi_{0} ) влияет на график колебаний (рис. 8). Для удобства будем считать, что мы рассматриваем колебания, которые происходят по закону синуса.
Кривая, обозначенная черным на рисунке, начинает период колебаний из точки t = 0. Эта кривая является «чистым», не сдвинутым синусом. Для нее величину начальной фазы (large varphi_{0} ) принимаем равной нулю.

Рис. 8. Вертикальное положение стартовой точки в момент времени t = 0 и сдвиг графика по горизонтали определяется начальной фазой
Вторая кривая на рисунке обозначена красным цветом. Начало ее периода сдвинуто вправо относительно точки t = 0. Поэтому, для красной кривой, начавшей новый период колебаний спустя время (large Delta t), начальный угол (large varphi_{0} ) будет отличаться от нулевого значения.
Определим угол (large varphi_{0} ) с помощью графика колебаний.
Обратим внимание (рис.  на то, что время, лежащее на горизонтальной оси, измеряется в секундах, а величина (large varphi_{0} ) — в радианах. Значит, нужно связать формулой кусочек времени (large Delta t) и соответствующий ему начальный угол (large varphi_{0} ).
на то, что время, лежащее на горизонтальной оси, измеряется в секундах, а величина (large varphi_{0} ) — в радианах. Значит, нужно связать формулой кусочек времени (large Delta t) и соответствующий ему начальный угол (large varphi_{0} ).
Как вычислить начальный угол по интервалу смещения
Алгоритм нахождения начального угла состоит из нескольких несложных шагов.
- Сначала определим интервал времени, обозначенный синими стрелками на рисунке. На осях большинства графиков располагают цифры, по которым это можно сделать. Как видно из рис. 8, этот интервал (large Delta t) равен 1 сек.
- Затем определим период. Для этого отметим одно полное колебание на красной кривой. Колебание началось в точке t = 1, а закончилось в точке t =5. Взяв разность между этими двумя точками времени, получим значение периода.
[large T = 5 – 1 = 4 left( text{сек} right)]
Из графика следует, что период T = 4 сек.
- Рассчитаем теперь, какую долю периода составляет интервал времени (large Delta t). Для этого составим такую дробь (large displaystyle frac{Delta t }{T} ):
[large frac{Delta t }{T} = frac{1}{4} ]
Полученное значение дроби означает, что красная кривая сдвинута относительно точки t = 0 и черной кривой на четверть периода.
- Нам известно, что одно полное колебание — один полный оборот (цикл), синус (или косинус) совершает, проходя каждый раз угол (large 2pi ). Найдем теперь, как связана найденная доля периода с углом (large 2pi ) полного цикла.
Для этого используем формулу:
[large boxed{ frac{Delta t }{T} cdot 2pi = varphi_{0} }]
(large displaystyle frac{1}{4} cdot 2pi = frac{pi }{2} =varphi_{0} )
Значит, интервалу (large Delta t) соответствует угол (large displaystyle frac{pi }{2} ) – это начальная фаза для красной кривой на рисунке.
- В заключение обратим внимание на следующее. Начало ближайшего к точке t = 0 периода красной кривой сдвинуто вправо. То есть, кривая запаздывает относительно «чистого» синуса.
Чтобы обозначить запаздывание, будем использовать знак «минус» для начального угла:
[large varphi_{0} = — frac{pi }{2} ]
Примечание: Если на кривой колебаний начало ближайшего периода лежит левее точки t = 0, то в таком случае, угол (large displaystyle frac{pi }{2} ) имеет знак «плюс».
Для не сдвинутого влево, либо вправо, синуса или косинуса, начальная фаза нулевая (large varphi_{0} = 0 ).
Для синуса или косинуса, сдвинутого влево по графику и опережающего обычную функцию, начальная фаза берется со знаком «+».
А если функция сдвинута вправо и запаздывает относительно обычной функции, величину (large varphi_{0} ) записываем со знаком «-».
Примечания:
- Физики начинают отсчет времени из точки 0. Поэтому, время в задачах будет величиной не отрицательной.
- На графике колебаний начальная фаза ( varphi_{0}) влияет на вертикальный сдвиг точки, из которой стартует колебательный процесс. Значит, можно для простоты сказать, что колебания имеют начальную точку.
Благодаря таким допущениям график колебаний при решении большинства задач можно изображать, начиная из окрестности нуля и преимущественно в правой полуплоскости.
Что такое фаза колебаний
Рассмотрим еще раз обыкновенные детские качели (рис. 9) и угол их отклонения от положения равновесия. С течением времени этот угол изменяется, то есть, он зависит от времени.

Рис. 9. Угол отклонения от равновесия – фаза, изменяется в процессе колебаний
В процессе колебаний изменяется угол отклонения от равновесия. Этот изменяющийся угол называют фазой колебаний и обозначают (varphi).
Различия между фазой и начальной фазой
Существуют два угла отклонения от равновесия – начальный, он задается перед началом колебаний и, угол, изменяющийся во время колебаний.
Первый угол называют начальной ( varphi_{0}) фазой (рис. 10а), она считается неизменной величиной. А второй угол – просто ( varphi) фазой (рис. 10б) – это величина переменная.

Рис. 10. Перед началом колебаний задаем начальную фазу — начальный угол отклонения от равновесия. А угол, который изменяется во время колебаний, называют фазой
Как на графике колебаний отметить фазу
На графике колебаний фаза (large varphi) выглядит, как точка на кривой. С течением времени эта точка сдвигается (бежит) по графику слева направо (рис. 11). То есть, в разные моменты времени она будет находиться на различных участках кривой.
На рисунке отмечены две крупные красные точки, они соответствуют фазам колебаний в моменты времени t1 и t2.

Рис. 11. На графике колебаний фаза – это точка, скользящая по кривой. В различные моменты времени она находится в разных положениях на графике
А начальная фаза на графике колебаний выглядит, как место, в котором находится точка, лежащая на кривой колебаний, в момент времени t=0. На рисунке дополнительно присутствует одна мелкая красная точка, она соответствует начальной фазе колебаний.
Как определить фазу с помощью формулы
Пусть нам известны величины (large omega) — циклическая частота и (large varphi_{0}) — начальная фаза. Во время колебаний эти величины не изменяются, то есть, являются константами.
Время колебаний t будет величиной переменной.
Фазу (large varphi), соответствующую любому интересующему нас моменту t времени, можно определить из такого уравнения:
[large boxed{ varphi = omega cdot t + varphi_{0} }]
Левая и правая части этого уравнения имеют размерность угла (т. е. измеряются в радианах, или градусах). А подставляя вместо символа t в это уравнение интересующие нас значения времени, можно получать соответствующие им значения фазы.
Что такое разность фаз
Обычно понятие разности фаз применяют, когда сравнивают два колебательных процесса между собой.
Рассмотрим два колебательных процесса (рис. 12). Каждый имеет свою начальную фазу.
Обозначим их:
( large varphi_{01}) – для первого процесса и,
( large varphi_{02}) – для второго процесса.

Рис. 12. Для двух колебаний можно ввести понятие разности фаз
Определим разность фаз между первым и вторым колебательными процессами:
[large boxed{ Delta varphi = varphi_{01} — varphi_{02} }]
Величина (large Delta varphi ) показывает, на сколько отличаются фазы двух колебаний, она называется разностью фаз.
Как связаны характеристики колебаний — формулы
Движение по окружности и колебательное движение имеют определенную схожесть, так как эти виды движения могут быть периодическими.
Поэтому, основные формулы, применимые для движения по окружности, подойдут так же, для описания колебательного движения.
- Связь между периодом, количеством колебаний и общим временем колебательного процесса:
[large boxed{ T cdot N = t }]
( large T left( c right) ) – время одного полного колебания (период колебаний);
( large N left( text{шт} right) ) – количество полных колебаний;
( large t left( c right) ) – общее время для нескольких колебаний;
- Период и частота колебаний связаны так:
[large boxed{ T = frac{1}{nu} }]
(large nu left( text{Гц} right) ) – частота колебаний.
- Количество и частота колебаний связаны формулой:
[large boxed{ N = nu cdot t}]
- Связь между частотой и циклической частотой колебаний:
[large boxed{ nu cdot 2pi = omega }]
(large displaystyle omega left( frac{text{рад}}{c} right) ) – циклическая (круговая) частота колебаний.
- Фаза и циклическая частота колебаний связаны так:
[large boxed{ varphi = omega cdot t + varphi_{0} }]
(large varphi_{0} left( text{рад} right) ) — начальная фаза;
(large varphi left( text{рад} right) ) – фаза (угол) в выбранный момент времени t;
- Между фазой и количеством колебаний связь описана так:
[large boxed{ varphi = N cdot 2pi }]
- Интервал времени (large Delta t ) (сдвигом) и начальная фаза колебаний связаны:
[large boxed{ frac{Delta t }{T} cdot 2pi = varphi_{0} }]
(large Delta t left( c right) ) — интервал времени, на который относительно точки t=0 сдвинуто начало ближайшего периода.
Механические колебания.
-
Гармонические колебания.
-
Уравнение гармонических колебаний.
-
Пружинный маятник.
-
Математический маятник.
-
Свободные и вынужденные колебания.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ : гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания — это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания — это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия — это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание. Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела — это величина его наибольшего отклонения от положения равновесия.
Период колебаний  — это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
— это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний  — это величина, обратная периоду:
— это величина, обратная периоду:  . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
. Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
к оглавлению ▴
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой  . Положению равновесия отвечает значение
. Положению равновесия отвечает значение  . Основная задача механики в данном случае состоит в нахождении функции
. Основная задача механики в данном случае состоит в нахождении функции ") , дающей координату тела в любой момент времени.
, дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них — синус и косинус — являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на  , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
, можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
Гармонические колебания — это колебания, при которых координата зависит от времени по гармоническому закону:
") (1)
(1)
Выясним смысл входящих в эту формулу величин.
Положительная величина  является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
Аргумент косинуса  называется фазой колебаний. Величина
называется фазой колебаний. Величина  , равная значению фазы при
, равная значению фазы при  , называется начальной фазой. Начальная фаза отвечает начальной координате тела:
, называется начальной фазой. Начальная фаза отвечает начальной координате тела:  .
.
Величина называется  циклической частотой. Найдём её связь с периодом колебаний и частотой
циклической частотой. Найдём её связь с периодом колебаний и частотой  . Одному полному колебанию отвечает приращение фазы, равное
. Одному полному колебанию отвечает приращение фазы, равное  радиан:
радиан:  , откуда
, откуда
 (2)
(2)
 (3)
(3)
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1):
, x=Acos(2 pi nu t + alpha)") .
.
График функции (1), выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1.
 |
| Рис. 1. График гармонических колебаний |
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину  и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае  , поэтому можно положить
, поэтому можно положить  . Мы получаем закон косинуса:
. Мы получаем закон косинуса:
 .
.
График гармонических колебаний в этом случае представлен на рис. 2.
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае  , так что можно положить
, так что можно положить  . Получаем закон синуса:
. Получаем закон синуса:
 .
.
График колебаний представлен на рис. 3.
 |
| Рис. 3. Закон синуса |
к оглавлению ▴
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1). Дифференцируем это равенство:
") . (4)
. (4)
Теперь дифференцируем полученное равенство (4):
") . (5)
. (5)
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем  :
:
 . (6)
. (6)
Это соотношение называется уравнением гармонических колебаний. Его можно переписать и в таком виде:
 . (7)
. (7)
C математической точки зрения уравнение (7) является дифференциальным уравнением. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
-решением уравнения (7) является всякая функция вида (1) с произвольными  ;
;
-никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6), (7) описывают гармонические колебания с циклической частотой  и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
к оглавлению ▴
Пружинный маятник.
Пружинный маятник — это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу  , жёсткость пружины равна
, жёсткость пружины равна  .
.
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости  со стороны пружины. Второй закон Ньютона для груза в проекции на ось
со стороны пружины. Второй закон Ньютона для груза в проекции на ось  имеет вид:
имеет вид:
 . (8)
. (8)
Если  (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и
(груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и  . Наоборот, если
. Наоборот, если  , то
, то  . Знаки и
. Знаки и  всё время противоположны, поэтому закон Гука можно записать так:
всё время противоположны, поэтому закон Гука можно записать так:

Тогда соотношение (8) принимает вид:

или
 .
.
Мы получили уравнение гармонических колебаний вида (6), в котором
 .
.
Циклическая частота колебаний пружинного маятника, таким образом, равна:
 . (9)
. (9)
Отсюда и из соотношения  находим период горизонтальных колебаний пружинного маятника:
находим период горизонтальных колебаний пружинного маятника:
 . (10)
. (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10).
к оглавлению ▴
Математический маятник.
Математический маятник — это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна  . Сопротивлением воздуха пренебрегаем.
. Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
 ,
,
и спроектируем его на ось :
 .
.
Если маятник занимает положение как на рисунке (т. е. ), то:
 .
.
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
 .
.
Итак, при любом положении маятника имеем:
 . (11)
. (11)
Когда маятник покоится в положении равновесия, выполнено равенство  . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство
. При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство  . Воспользуемся им в формуле (11):
. Воспользуемся им в формуле (11):
 ,
,
или
 .
.
Это — уравнение гармонических колебаний вида (6), в котором
 .
.
Следовательно, циклическая частота колебаний математического маятника равна:
 . (12)
. (12)
Отсюда период колебаний математического маятника:
 . (13)
. (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
к оглавлению ▴
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6).
 |
| Рис. 6. Затухающие колебания |
Вынужденные колебания — это колебания, совершаемые системой под воздействием внешней силы ") , периодически изменяющейся во времени (так называемой вынуждающей силы).
, периодически изменяющейся во времени (так называемой вынуждающей силы).
Предположим, что собственная частота колебаний системы равна  , а вынуждающая сила зависит от времени по гармоническому закону:
, а вынуждающая сила зависит от времени по гармоническому закону:
=F_{0}cos omega t") .
.
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7.
 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты  наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:
наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:  , и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,
, и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,  , а амплитуда колебаний возрастает до бесконечности при
, а амплитуда колебаний возрастает до бесконечности при  .
.
Благодарим за то, что пользуйтесь нашими материалами.
Информация на странице «Механические колебания.» подготовлена нашими редакторами специально, чтобы помочь вам в освоении предмета и подготовке к экзаменам.
Чтобы успешно сдать нужные и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими статьями из разделов нашего сайта.
Публикация обновлена:
08.05.2023
I. Механика
Тестирование онлайн
Гармоническое колебание
Это периодическое колебание, при котором координата, скорость, ускорение, характеризующие движение, изменяются по закону синуса или косинуса.
График гармонического колебания
График устанавливает зависимость смещения тела со временем. Установим к пружинному маятнику карандаш, за маятником бумажную ленту, которая равномерно перемещается. Или математический маятник заставим оставлять след. На бумаге отобразится график движения.

Графиком гармонического колебания является синусоида (или косинусоида). По графику колебаний можно определить все характеристики колебательного движения.
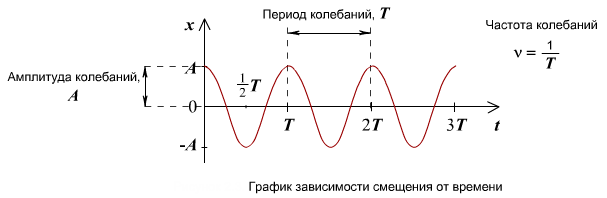
Уравнение гармонического колебания
Уравнение гармонического колебания устанавливает зависимость координаты тела от времени
График косинуса в начальный момент имеет максимальное значение, а график синуса имеет в начальный момент нулевое значение. Если колебание начинаем исследовать из положения равновесия, то колебание будет повторять синусоиду. Если колебание начинаем рассматривать из положения максимального отклонения, то колебание опишет косинус. Или такое колебание можно описать формулой синуса с начальной фазой  .
.
Изменение скорости и ускорения при гармоническом колебании
Не только координата тела изменяется со временем по закону синуса или косинуса. Но и такие величины, как сила, скорость и ускорение, тоже изменяются аналогично. Сила и ускорение максимальные, когда колеблющееся тело находится в крайних положениях, где смещение максимально, и равны нулю, когда тело проходит через положение равновесия. Скорость, наоборот, в крайних положениях равна нулю, а при прохождении телом положения равновесия — достигает максимального значения.
Если колебание описывать по закону косинуса
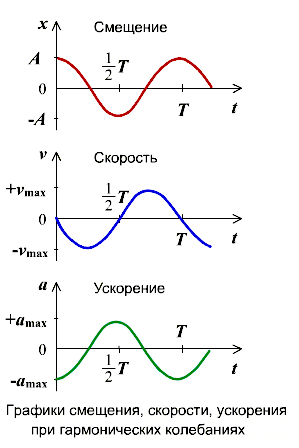

Если колебание описывать по закону синуса
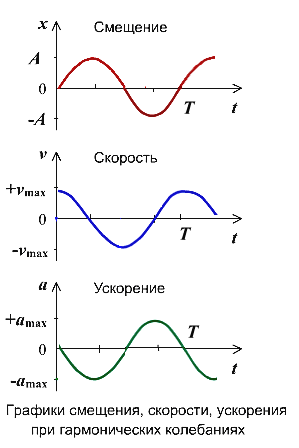
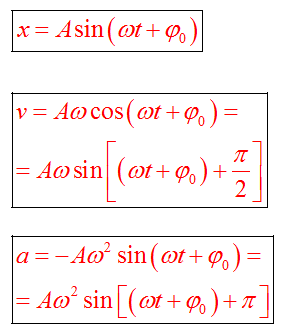
Максимальные значения скорости и ускорения
Проанализировав уравнения зависимости v(t) и a(t), можно догадаться, что максимальные значения скорость и ускорение принимают в том случае, когда тригонометрический множитель равен 1 или -1. Определяются по формуле