Законы сложения сил в механике
При воздействии на одно тело нескольких сил одновременно тело начинает двигаться с ускорением, являющимся векторной суммой ускорений, которые бы возникли под воздействием каждой силы по отдельности. К действующим на тело силам, приложенным к одной точке, применяется правило сложения векторов.
Векторная сумма всех сил, одновременно воздействующих на тело, это сила равнодействующая, которая определяется по правилу векторного сложения сил:
R → = F 1 → + F 2 → + F 3 → + . . . + F n → = ∑ i = 1 n F i → .
Равнодействующая сила действует на тело также, как и сумма всех действующих на него сил.
Правило параллелограмма и правило многоугольника
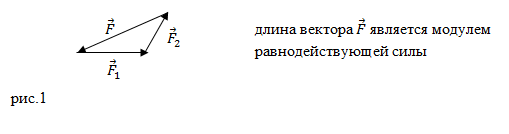
Для сложения 2 -х сил используют правило параллелограмма (рисунок 1 ).
Рисунок 1 . Сложение 2 -х сил по правилу параллелограмма
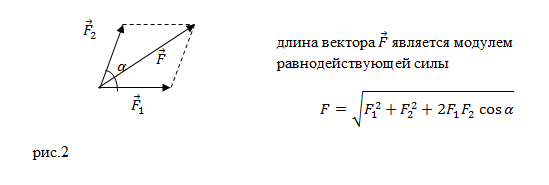
Выведем формулу модуля равнодействующей силы с помощью теоремы косинусов:
R → = F 1 → 2 + F 2 → 2 + 2 F 1 → 2 F 2 → 2 cos α
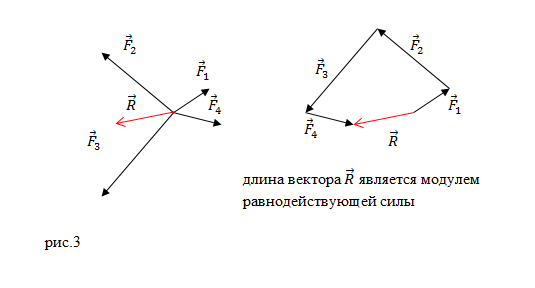
При необходимости сложения более 2 -х сил используют правило многоугольника: от конца
1 -й силы необходимо провести вектор, равный и параллельный 2 -й силе; от конца 2 -й силы необходимо провести вектор, равный и параллельный 3 -й силе и т.д.
Рисунок 2 . Сложение сил правилом многоугольника
Конечный вектор, проведенный от точки приложения сил в конец последней силы, по величине и направлению равняется равнодействующей силе. Рисунок 2 наглядно иллюстрирует пример нахождения равнодействующей сил из 4 -х сил: F 1 → , F 2 → , F 3 → , F 4 → . Причем суммируемые векторы совсем необязательно должны быть в одной плоскости.
Результат действия силы на материальную точку будет зависеть только от ее модуля и направления. У твердого тела есть определенные размеры. Потому силы с одинаковыми модулями и направлениями вызывают разные движения твердого тела в зависимости от точки приложения.
Линией действия силы называют прямую, проходящую через вектор силы.
Рисунок 3 . Сложение сил, приложенных к различным точкам тела
Если силы приложены к различным точкам тела и действуют не параллельно по отношению друг к другу, тогда равнодействующая приложена к точке пересечения линий действия сил (рисунок 3 ). Точка будет находиться в равновесии, если векторная сумма всех сил, действующих на нее, равняется 0 : ∑ i = 1 n F i → = 0 → . В данном случае равняется 0 и сумма проекций данных сил на любую координатную ось.
Разложение вектора силы по направлениям
Разложение сил на две составляющие – это замена одной силы 2 -мя, приложенными в той же точке и производящими на тело такое же действие, как и эта одна сила. Разложение сил осуществляется, как и сложение, правилом параллелограмма.
Задача разложения одной силы (модуль и направление которой заданы) на 2 , приложенные в одной точке и действующие под углом друг к другу, имеет однозначное решение в следующих случаях, когда известны:
- направления 2 -х составляющих сил;
- модуль и направление одной из составляющих сил;
- модули 2 -х составляющих сил.
Пример 1
Необходимо разложить силу F на 2 составляющие, находящиеся в одной плоскости с F и направленные вдоль прямых a и b (рисунок 4 ). Тогда достаточно от конца вектора F провести 2 прямые, параллельные прямым a и b . Отрезок F A и отрезок F B изображают искомые силы.
Рисунок 4 . Разложение вектора силы по направлениям
Второй вариант данной задачи – найти одну из проекций вектора силы по заданным векторам силы и 2 -й проекции (рисунок 5 а ).
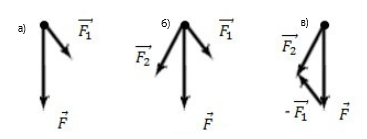
Рисунок 5 . Нахождение проекции вектора силы по заданным векторам
Во втором варианте задачи необходимо построить параллелограмм по диагонали и одной из сторон, как в планиметрии. На рисунке 5 б изображен такой параллелограмм и обозначена искомая составляющая F 2 → силы F → .
Итак, 2 -й способ решения: прибавим к силе силу, равную — F 1 → (рисунок 5 в ). В итоге получаем искомую силу F → .
Три силы F 1 → = 1 Н ; F 2 → = 2 Н ; F 3 → = 3 Н приложены к одной точке, находятся в одной плоскости (рисунок 6 а ) и составляют углы с горизонталью α = 0 ° ; β = 60 ° ; γ = 30 ° соответственно. Необходимо найти равнодействующую силу.
Решение
Рисунок 6 . Нахождение равнодействующей силы по заданным векторам
Нарисуем взаимно перпендикулярные оси О Х и O Y таким образом, чтобы ось О Х совпадала с горизонталью, вдоль которой направлена сила F 1 → . Сделаем проекцию данных сил на координатные оси (рисунок 6 б ). Проекции F 2 y и F 2 x отрицательны. Сумма проекций сил на координатную ось О Х равняется проекции на данную ось равнодействующей: F 1 + F 2 cos β — F 3 cos γ = F x = 4 — 3 3 2 ≈ — 0 , 6 Н .
Точно также для проекций на ось O Y : — F 2 sin β + F 3 sin γ = F y = 3 — 2 3 2 ≈ — 0 , 2 Н .
Модуль равнодействующей определим с помощью теоремы Пифагора:
F = F x 2 + F y 2 = 0 , 36 + 0 , 04 ≈ 0 , 64 Н .
Направление равнодействующей найдем при помощи угла между равнодействующей и осью (рисунок 6 в ):
t g φ = F y F x = 3 — 2 3 4 — 3 3 ≈ 0 , 4 .
Сила F = 1 к Н приложена в точке В кронштейна и направлена вертикально вниз (рисунок 7 а ). Необходимо найти составляющие данной силы по направлениям стержней кронштейна. Все необходимые данные отображены на рисунке.
Решение
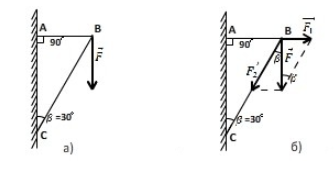
Рисунок 7 . Нахождение составляющих силы F по направлениям стержней кронштейна
Дано:
F = 1 к Н = 1000 Н
Пускай стержни прикручены к стене в точках А и С . На рисунке 7 б изображено разложение силы F → на составляющие вдоль направлений А В и В С . Отсюда понятно, что
F 1 → = F t g β ≈ 577 Н ;
F 2 → = F cos β ≈ 1155 Н .
Ответ: F 1 → = 557 Н ; F 2 → = 1155 Н .
Как найти равнодействующую трех векторов
Скорость автомобиля массой 1000 кг, движущегося вдоль оси Ox, изменяется со временем в соответствии с графиком (см. рисунок). Систему отсчета считать инерциальной. Чему равна равнодействующая всех сил, действующих на автомобиль? (Ответ дайте в ньютонах.)
Согласно второму закону Ньютона, равнодействующая всех сил, действующих на тело, связана с ускорением и массой тела соотношением Из графика определим ускорение, которое остается постоянным на протяжении всего интервала времени:
Таким образом, равнодействующая всех сил равна
а если бы ускорение было отрицательно, то и равнодействующая была бы отрицательной?
Скорость, сила, ускорение — все это векторные величины. Правильно говорить не про их знак, а про знак проекции этих векторов на некоторую ось. Если проекция скорости уменьшается, то ускорение направлено против оси, а значит, так же направлена и равнодействующая. Следовательно, проекции этих величин отрицательны. По графику модуля скорости о знаке проекций судить нельзя. Действительно, имея только график, приведенный в условии, мы не можем сказать, ускоряется тело вдоль оси или против. Проекция ускорения может быть тут как положительной, так и отрицательной.
«Систему отсчета считать инерциальной.» Возможно ошибаюсь, ребят, но, вроде, в ИСО равнодействующая всех сил равна нулю.
ИСО — это система отсчета, в которой тело, на которое не действует никаких внешних сил, двигается равномерно и прямолинейно или покоится.
Равнодействующая сил, конечно, же может и отличаться от нуля, это, согласно второму закону Ньютона, приведет к появлению ускорения.
т.е. в инерциальной системе отсчёта нет силы трения?
и ещё: вы говорите, что тело в ИСО движется равномерно, а в условии задачи дано равноускоренное движение. так бывает?
Я не так говорю, не вырывайте слова и контекста. Я даю определение ИСО: это система отсчета, в которой тело, НА КОТОРОЕ НЕ ДЕЙСТВУЮТ ВНЕШНИЕ СИЛЫ, двигается равномерно и прямолинейно, либо покоится. А вот если СИЛЫ ДЕЙСТВУЮТ, то это приводит к появлению ускорения, о чем нам и говорит второй закон Ньютона.
Наличие силы трения определяется свойством поверхностей, а не выбором системы отсчета. И в данной задаче, она, конечно, присутствует и направлена по скорости движения автомобиля, иначе бы он просто не мог бы разгоняться. Но чему она равна, мы найти из данного графика не можем, так как есть и другие силы, например, сила сопротивления воздуха. Что мы может тут определить, так это равнодействующую всех сил. Именно ей определяется ускорение.
Пыталась найти ускорение как тангенс угла наклона касательной, то есть производную от v по t. Тут угол — 45 град, тангенс = 1, ускорение, стало быть, так же 1 м/с^2.
Подскажите пожалуйста, где в моих рассуждениях ошибка?
Ошибка в том, что тангенс надо считать, учитывая масштаб графика по осям. То есть Вы должны определить катеты прямоугольного треугольника, используя числа на осях, а потом поделить один катет на другой.
Кстати, простое доказательство, почему Ваше решение не верно. Сожмем картинку с графиком по вертикали в два раза. Угол на рисунке изменится, а ускорение, конечно, же останется прежним.
а почему считают ускорение до 8с. а не до 18, если найдем ускорение по всей длине то получается 10-0/18=1,8 и получается другой ответ!
Делить нужно на 20. Масштаб по горизонтальной оси: в одной клеточке 4 с
На тело, находящееся на горизонтальной плоскости, действуют три горизонтальные силы (см. рисунок, вид сверху). Каков модуль равнодействующей этих сил, если (Ответ дайте в ньютонах и округлите до десятых.)
На рисунке обозначена равнодействующая векторов и
Поскольку модуль вектора силы равен 1 Н, заключаем, что масштаб рисунка такой, что сторона одного квадрата сетки соответствует модулю силы 1 Н. Таким образом, модуль равнодействующей равен по теореме Пифагора
А как определили эту равнодействующую трёх сил, я понять не могу?!
Чтобы найти равнодействующую, необходимо сложить вектора всех сил (например, по правилу треугольника или параллелограмма складываем вектора по два).
Если сложить вектор и вектор , получится вектор, направленный вверх длиной в одну клеточку. Теперь осталось прибавить к нему вектор . В результате и получается то, что показано красной стрелкой.
векторы F1 и F3 никак нельзя сложить правилом треугольника! дак как эту задачц решить тут решения совсем непонятные!
Когда Вы складываете параллельные вектора, у Вас просто получается «вырожденный треугольник». Правила все те же, к концу первого вектора прикладываем начало второго. Сумма векторов — это вектор, который начинается в начале первого и заканчивается в конце второго. То есть в данном случае у Вас получится вектор, направленный вверх и длиной в одну клеточку.
Две силы 3 H и 4 H приложены к одной точке тела, угол между векторами сил равен 90°. Чему равен модуль равнодействующей сил? (Ответ дайте в ньютонах.)
Силы и их равнодействующая указаны на рисунке. По теореме Пифагора, модуль равнодействующей сил равен
Под действием одной силы F1 тело движется с ускорением 4 м/с 2 . Под действием другой силы F2, направленной противоположно силе F1, ускорение тела равно 3 м/с 2 . С каким ускорением тело будет двигаться при одновременном действии сил F1 и F2? Ответ дайте в метрах на секунду в квадрате.
Согласно второму закону Ньютона, ускорение тела пропорционально равнодействующей всех сил, действующих на него: Силы и по условию, направлены противоположно, поэтому при их одновременном действии тело будет двигаться с ускорением
Тело подвешено на двух нитях и находится в равновесии. Угол между нитями равен 90°, а силы натяжения нитей равны 3 H и 4 H. Чему равна сила тяжести, действующая на тело? (Ответ дайте в ньютонах.)
Всего на тело действует три силы: сила тяжести и силы натяжения двух нитей. Поскольку тело находится в равновесии, равнодействующая всех трех сил должна равняться нулю, а значит, модуль силы тяжести равен
в условии написано,что нужно найти вес тела.
а в решении модуль силы тяжести.
Как вес может измеряться в Ньютонах.
В условии ошибка(
Вы путаете понятия массы и веса. Весом тела называется сила (а потому вес измеряется в Ньютонах), с которой тело давит на опору или растягивает подвес. Как следует из определения, эта сила приложена даже не к телу, а к опоре. Невесомость — это состояние, когда у тела пропадает не масса, а вес, то есть тело перестает давить на другие тела.
Согласен, в решении была допущена некоторая вольность в определениях, сейчас она поправлена.
Понятие «вес тела» введен в учебную физику крайне неудачно. Если в бытовом понятии вес обозначает массу то в школьной физике, как вы правильно заметили весом тела называется сила (а потому вес измеряется в Ньютонах), с которой тело давит на опору или растягивает подвес. Заметим, что речь идет об одной опоре и об одной нити. Если опор или нитей несколько несколько, понятие веса исчезает.
Привожу пример. Пусть в жидкости на нити подвешено тело. Оно растягивает нить и давит на жидкость с силой равной минус сила Архимеда. Почему же, говоря о весе тела в жидкости, мы не складываем эти силы, как Вы делаете в своем решении?
Я зарегистрировался на Вашем сайте, но не заметил, что же изменилось в нашем общении. Прошу извинить мою тупость, но я, будучи человеком старым, недостаточно свободно ориентируюсь на сайте.
Действительно, понятие веса тела весьма расплывчато, когда тело имеет несколько опор. Обычно вес в этом случае определяют как сумму взаимодействий со всеми опорами. При этом воздействие на газообразные и жидкие среды, как правило, исключается. Это как раз подпадает под описанный Вами пример, с подвешенным в воде грузиком.
Здесь сразу вспоминается детская задачка: «Что весит больше: килограмм пуха или килограмм свинца?» Если решать эту задачу по-честному, то нужно несомненно учитывать силу Архимеда. А под весом скорее всего мы будем понимать то, что нам будут показывать весы, то есть силу, с которой пух и свинец давят, скажем, на чашку весов. То есть здесь сила взаимодействие с воздухом как бы из понятия веса исключается.
С другой стороны, если считать, что мы откачали весь воздух и кладем на весы тело, к которому привязана веревочка. То сила тяжести будет уравновешиваться суммой силы реакции опоры и силой натяжения нити. Если мы понимаем вес как силу действия на опоры, препятствующие падению, то вес тут будет равен этой сумме силы растяжения нити и силы давления на чашку весов, то есть совпадать по величине с силой тяжести. Опять возникает вопрос: чем нитка лучше или хуже силы Архимеда?
В целом тут можно договориться до того, что понятие веса имеет смысл только в пустом пространстве, где есть только одна опора и тело. Как тут быть, это вопрос терминологии, которая, к сожалению, у каждого здесь своя, поскольку не столь уж это и важный вопрос  И если силой Архимеда в воздухе во всех обычных случаях можно пренебречь, а значит, на величину веса она особо повлиять не может, то для тела в жидкости это уже критично.
И если силой Архимеда в воздухе во всех обычных случаях можно пренебречь, а значит, на величину веса она особо повлиять не может, то для тела в жидкости это уже критично.
Если уж быть совсем честным, то разделение сил на виды весьма условно. Представим себе ящик, который тащат по горизонтальной поверхности. Обычно говорят, что на ящик действуют две силы со стороны поверхности: сила реакции опоры, направленная вертикально, и сила трения, направленная горизонтально. Но ведь это две силы, действующие между одними и теми же телами, почему же мы просто не рисуем одну силу, являющуюся их векторной суммой (так, кстати, иногда и делается). Тут, это, наверное, вопрос удобства
Так что я немного в замешательстве, что делать с данной конкретной задачей. Проще всего, наверное, переформулировать ее и задавать вопрос про величину силы тяжести.
Не переживайте, все в порядке. При регистрации Вы должны были указать e-mail. Если теперь зайти на сайт под своим аккаунтом, то при попытке оставить комментарий в окне «Ваш e-mail» должен сразу появляться тот самый адрес. После этого система будет автоматически подписывать Ваши сообщения.
Формула модуля равнодействующей силы
На тело могут оказывать действие не одна, а некоторая совокупность сил. Суммарное действие этих сил характеризуют, используя понятие равнодействующей силы.
Формула равнодействующей всех сил
Пусть на тело воздействуют в один и тот же момент времени N сил. Ускорение тела при этом равно сумме векторов ускорений, которые возникли бы при наличии каждой силы отдельно. Сила является векторной величиной. Следовательно, силы, действующие на тело, нужно складывать в соответствии с правилом сложения векторов. Равнодействующей силой ($overline$) называют векторную сумму всех сил, которые оказывают действие на тело в рассматриваемый момент времени:
Формула (1) — это формула равнодействующей всех сил, приложенных к телу. Равнодействующая сила является искусственной величиной, которую вводят для удобства проведения вычислений. Равнодействующая сила направлена также как вектор ускорения тела.
Складывают векторы, используя правило треугольника (рис.1)
правило параллелограмма (рис.2).
или многоугольника (рис.3):
Второй закон Ньютона и формула модуля равнодействующей
Основной закон динамики поступательного движения в механике можно считать формулой для нахождения модуля равнодействующей силы, приложенной к телу и вызывающей ускорение этого тела:
$overline=0$, если силы, приложенные к телу, взаимно компенсируют друг друга. Тогда в инерциальной системе отсчета тело скорость движения тела.
При изображении сил, действующих на тело, на рисунке, в случае равноускоренного движения, равнодействующую силу, изображают длиннее, чем сумму сил, которые противоположно ей направлены. Если тело перемещается с постоянной скоростью или покоится, длины векторов сил (равнодействующей и сумме остальных сил), одинаковы и направлены они в противоположные стороны.
Когда находят равнодействующую сил, на рисунке изображают все учитываемые в задаче силы. Суммируют эти силы в соответствии с правилами сложения векторов.
Примеры задач с решением
Задание. К материальной точке приложены силы, направленные под углом $alpha =60<>^circ $ друг к другу (рис.4). Чему равен модуль равнодействующей этих сил, если $F_1=40 $Н; $F_2=20 $Н?
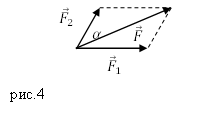
Решение. Силы на рис. 1 сложим, используя правило параллелограмма. Длину равнодействующей силы $overline$ найдем, применяя теорему косинусов:
Вычислим модуль равнодействующей силы:
[F=sqrt<<40>^2+<20>^2+2cdot 40cdot 20<cos (60<>^circ ) >>approx 52,92 left(Нright).]
Ответ. $F=52,92$ Н
Задание. Как изменяется модуль равнодействующей силы со временем, если материальная точка массы $m$ перемещается в соответствии с законом: $s=A<cos (omega t)(м) >$, где $s$ — путь пройденный точкой; $A=const;; omega =const?$ Чему равна максимальная величина этой силы?
Решение. По второму закону Ньютона равнодействующая сил, действующих на материальную точку равна:
Следовательно, модуль силы можно найти как:
Ускорение точки будем искать, используя связь между ним и перемещением точки:
Первая производная от $s$ по времени равна:
Подставим полученный в (2.5) результат, в формулу модуля для равнодействующей силы (2.2) запишем как:
Так как косинус может быть меньше или равен единицы, то максимальное значение модуля силы, действующей на точку, составит:
http://phys-ege.sdamgia.ru/test?theme=206
http://www.webmath.ru/poleznoe/fizika/fizika_134_formula_modulja_ravnodejstvujushhej_sily.php

google.com/+ВикторЦекунов
Репетитор по математике, физике (Минск): Виктор Иванович.
Высшая математика и физика для студентов.
Профессиональный репетитор окажет помощь в решении задач, подготовит к экзаменам. Занятия в Серебрянке, индивидуально. (90 мин)
= 20 $.
Тел: +375(29) 127 61 86.
____________________________________________________________________________________
Оказываю
платные услуги: решение задач по высшей математике. Оплата WebMoney.
Заказы направляйте сюда: Платные услуги
____________________________________________________________________________________
1.1. Векторы и координаты.
1.1.1. Координаты на прямой, на плоскости, в пространстве.
1.1.2. Линейные операции над векторами.
1.1.3. Скалярное произведение векторов.
1.1.4. Векторное произведение векторов.
1.1.5. Смешанное произведение векторов.
1.2. Прямая на плоскости.
1.3. Плоскости и прямые.
1.4. Плоские фигуры второго порядка.
1.4.1. Эллипс.
1.4.2. Гипербола.
1.4.3. Парабола.
1.4.4. Плоские фигуры второго порядка.
1.5. Фигуры второго порядка.
____________________________________________________________________________________
1.1. Векторы и координаты.
1.1.1. Координаты на прямой, на плоскости, в пространстве.
1.1.1-1.
Найдите
на оси Y точки,
которые удалены от точки A(-3; 2; 4) на расстояние 13.
Решение:
A(-3; 2; 4)
d = 13
M(0; y; 0) – ?
Имеем x1 = — 3, y1 = 2, z1 = 4, x2 = 0, y2 = y, z2 = 0.
Расстояние
d между точками А и М:
![]()
Получим
![]()
возведя в квадрат, получим
169 = 9 + (2 — y)² + 16
или y² — 4y — 140 = 0, корни которого: y₁ =
14, y₂ =
-10.
Ответ: y₁ =
14, y₂ =
-10.
_____________________________________________________________________________________1.1.1-2.
Найдите на оси X точки, которые удалены от точки A(4;
-2; 3) на расстояние 7.
Решение:
A(4;
-2; 3)
d = 7
M(x; 0;
0) – ?
Имеем
x1 = 4,
y1 =
-2, z1 = 3,
x2 = x, y2 = 0,
z2 = 0.
Расстояние d между
точками А и М:
![]()
Получим
![]()
возведя в квадрат, получим
49 = (4 — x)² + 4
+ 9 или x² — 8x — 20
= 0, корни которого: x₁ = -2, x₂ = 10.
Ответ:
x₁ = -2, x₂ = 10.
____________________________________________________________________________________
1.1.2. Линейные операции над векторами.
1.1.2-1. Даны векторы a и b (см. рис.).

Построить векторы:
а) a + 2b;
б) 3a — b;
в) (-1/2)a + 3b.

Решение:
а) (см. рис. 1). Длина вектора 2b в 2 раза больше длины вектора b;
направления векторов 2b и b совпадают. От конца вектора а отложим вектор 2b.
Соединив начало вектора а с концом вектора 2b,
получим искомый вектор с = а + 2b.

б) (см. рис. 2). Длина вектора 3а в 3 раза больше длины вектора а; направления
векторов 3а и а совпадают. Длина вектора —b равна
длине вектора b;
направления векторов —b и b противоположны. От конца вектора 3а отложим вектор —b.
Соединив начало вектора 3а с концом вектора —b,
получим искомый вектор с = 3а — b.

в) (см. рис. 3). Длина вектора (-1/2)а в 2 раза
меньше длины вектора а; направления векторов (-1/2)а и а противоположны. Длина
вектора 3b в 3
раза больше длины вектора b; направления векторов 3b и b совпадают.
От конца вектора (-1/2)а отложим вектор 3b.
Соединив начало вектора (-1/2)а с концом вектора 3b,
получим искомый вектор с = (-1/2)а + 3b.
_____________________________________________________________________________________1.1.2-2. Даны векторы
![]() − медиана треугольника ОАВ. Разложить аналитически и
− медиана треугольника ОАВ. Разложить аналитически и
геометрически вектор с по векторам а и b.
Решение:

1. Аналитическое разложение с по а и b.
На рис. 1 изображён ∆ ОАВ и вектора a, b и c. По ∆ ОАВ достроим параллелограмм. Для этого на
прямой а, проходящей через ОС отложим отрезок CD = OC.
Получили параллелограмм OADB, у которого (см. рис. 2)
![]()
Из рис. 2 следует

или a + b = 2c,
отсюда получаем аналитическое разложение вектора с по а и b:
a + b
c =
––––– . (1)
2

2. Геометрическое разложение с по а и b.
Из (1) следует
c =
(1/2)a +
(1/2)b. (*)
В соответствии с (*), на рис. 2 отложим векторы
![]()
и, проведя отрезки А1С и В1С, получим параллелограмм ОА1СВ1. Диагональ

параллелограмма ОА1СВ1 разложена по
векторам
![]()
a +
b
Ответ: c = ––––– .
2
_______________________________________________________________________________________
1.1.2-3. Дан треугольник АВС, О — точка пересечения его медиан. Векторы 1) ВС, 2) АВ, 3) СА разложите по векторам ОА и ОВ.

Решение:
Учтём,
что медианы в точке пересечения делятся в отношении 2:1, считая от вершины.
Пусть К – середина BC, N – середина AC (см. рис.).
Запишем векторные равенства:
1) BK + KO = BO, (*)
BK = BC/2, KO = OA/2, BO = — OB.
Подставим в (*)
BC/2 + OA/2 = — OB,
отсюда
BC = — OA — 2·OB.
2)
OA + AB = OB, отсюда
AB = — OA +
OB.
3) NO + OA = NA, (**)
NO = OB/2, NA = CA/2. Подставим
в (**)
OB/2 + OA = CA/2,
отсюда
CA = 2·OA + OB.
Ответ: BC = — OA — 2·OB, AB = —OA +
OB, CA = 2·OA + OB.
_________________________________________________________________________________________
1.1.2-4.
На плоскости даны два вектора p = (2; — 3), q = (1; 2). Найти разложение вектора а = (9; 4) по
базису p, q.
Решение:
p = (2;
— 3)
q = (1;
2)
а = (9; 4)
Разложить а по базису p, q.
Пусть требуемое разложение имеет вид
а = x1p + x2q. (1)
Числа x1 и x2
будут координатами вектора а в базисе p, q.
Для нахождения чисел x1 и x2 составим систему двух уравнений

(2)
В системе (2) коэффициенты при
x1 − проекции вектора p,
коэффициенты при x2 − проекции вектора q,
правая часть системы (2) − проекции вектора а.
Решим систему (2) по формулам Крамера:
x1 =
∆1/∆; x2 =
∆2/∆. (3)
Вычисляем определители ∆ , ∆1 , ∆2 системы (2)

Тогда по (3) получим
x1 =
14/7 = 2; x2 =
35/7 = 5
и разложение (1) примет вид
а = 2p + 5q.
Ответ:
а = 2p + 5q.
_________________________________________________________________________________________1.1.2-5.
Даны векторы а1 = (3; 1; 2), а2 = (2; 1; 2), а3 = (-1; 2; 5), d = (5;
0; -1) в некотором базисе. Показать, что векторы а1 , а2 , а3 образуют базис, и
вычислить координаты вектора d в этом базисе.
Решение:
а1 = (3; 1; 2)
а2 = (2; 1; 2)
а3 = (-1; 2; 5)
d = (5;
0; -1)
Разложить d по
базису а1 , а2 , а3 .
1. Покажем, что векторы а1 , а2 , а3 образуют базис.
Вычислим определитель ∆ третьего порядка, столбцы которого − проекции векторов
а1 , а2 , а3 соответственно

= 3(1·5 — 2·2) — 2(1·5 — 2·2) — (1·2 — 2·1) = 1 ≠ 0.
Поскольку определитель ∆ ≠ 0, то векторы а1 , а2 , а3 линейно независимы.
Следовательно, они образуют базис.
2. Вычисление координат вектора d в базисе а1 , а2 , а3 .
Пусть требуемое разложение имеет вид
d = x1а1 + x2а2 + x3а3
. (1)
Числа x1 , x2 и x3
будут координатами вектора d в базисе а1 , а2 , а3 .
Для нахождения чисел x1 , x2 и x3 составим систему трёх уравнений

(2)
В системе (2) коэффициенты при
x1 − проекции вектора а1 , коэффициенты при x2 −
проекции вектора а2 , коэффициенты при x3 −
проекции вектора а3, правая часть системы (2) − проекции вектора d.
Решим систему (2) по формулам Крамера:
x1 =
∆1/∆; x2 =
∆2/∆; x3 =
∆3/∆. (3)
Вычисляем определители ∆1 , ∆2 и ∆3 системы (2) (∆ = 1 найден в п. 1):

Тогда по (3) получим
x1 =
0/1 = 0; x2 =
2/1 = 2; x3 =
-1/1 = — 1.
и разложение (1) примет вид
d = 2а2
— а3.
Ответ: d = 2а2
— а3 .
_________________________________________________________________________________________1.1.2-6.
На векторах а = {6, 8, 6} и b = {8, 20, 24}, заданных в декартовом прямоугольном
базисе и приведённых к началу координат, построен параллелограмм. Найти
середину его диагонали.

Решение:
Точка О = (0; 0; 0) − начало координат (см. рис.)
OBCD −
параллелограмм
OB = a = {6,
8, 6}
OD = b = {8,
20, 24}
Ax, Ay, Az − ? (A −
середина диагоналей параллелограмма)
Имеем:
OC = OB + OD = {6,
8, 6} + {8, 20, 24} = {6+8, 8+20, 6+24} = {14, 28, 30}.
OC =
{14, 28, 30}.
Тогда вектор OA:
OA =
(1/2)OC =
{14/2, 28/2, 30/2} = {7, 14, 15}.
OA = {7,
14, 15}.
Проекции вектора OA:
(OA)x = Ax — Ox,
отсюда Ax = (OA)x + Ox = 7 +
0 = 7;
(OA)y = Ay — Oy,
отсюда Ay = (OA)y + Oy = 14
+ 0 = 14;
(OA)z = Az — Oz,
отсюда Az = (OA)z + Oz = 15
+ 0 = 15;
Итак, точка А имеет координаты: А = (7, 14, 15).
Ответ:
А = (7, 14, 15).
_________________________________________________________________________________________ 1.1.2-7.
Даны три вектора a = 2i — 3j + k, b = —i + 2j — 3k, c = 3i — k. Найти координаты вектора d = -2a + 3b + 5c.
Решение:
a = {2;
-3; 1}
b =
{-1; 2; -3}
c = {3;
0; -1}.
d = -2a + 3b + 5c. (1)
координаты вектора d − ?
Подставляя в (1) проекции векторов a, b, c, получим d = -2a + 3b + 5c = -2{2; -3; 1} + 3{-1; 2; -3} + 5{3; 0; -1} =
(умножаем проекции соответственно на -2, 3 и 5) = {(-2)·2; (-2)·(-3); (-2)·1} +
{3·(-1); 3·2; 3·(-3)} + {5·3; 5·0; 5·(-1)} = {-4; 6; -2} + {-3; 6; -9} + {15;
0; -5} = (сложим соответствующие проекции) = {- 4 — 3 + 15; 6 + 6 + 0; -2 — 9 —
5} = {8; 12; -16}.
Получили
d = {8; 12; -16}.
Ответ: d = {8; 12; -16}.
____________________________________________________________________________________
1.1.3. Скалярное произведение векторов.
1.1.3-1.
Вычислить |a — b|,
если |b| = 4
|b| = 4
и α =
135⁰ (α −
угол между векторами a и b).
Решение:
Имеем
|a — b| ≥ 0.
(1)
Возведём |a — b| в
квадрат и применим формулы:
|x|2 = x2;
(ab) = |a||b|cosα −
скалярное произведение векторов а и b.
Получим
|a — b|² = (a — b)² = a² — 2(ab) + b² = |a|²- 2(ab) + |b|² = |a|²- 2|a||b|cosα + |b|² =

Получили |a — b|² =
40, отсюда с учётом (1), получим

_____________________________________________________________________________1.1.3-2.
Вычислите скалярное произведение векторов m и n, если
m = a + 2b — c,
n = 2a — b, |a| = 2 ,
|b| = 3; a угол
между векторами a и b равен 60⁰; c перпендикулярно a; c
перпендикулярно b.Решение:
a,b,c,m,n – вектора
m = a + 2b — c,
n = 2a — b,
|a| = 2,
|b| = 3
Ψ = 60⁰ (угол между векторами a и b)
c перпендикулярно a;
c перпендикулярно b.
(mn) – ?
Заметим,
т.к. c
перпендикулярно a, то их скалярное произведение равно нулю
(ас) = 0. (1)
Аналогично
(bc) = 0.
(2)
Умножаем скалярно
(mn) = (a + 2b — c)(2a — b) = 2|а|² — (ab) + 4(ab) — 2|b|² — 2(ac) + (bc).
С учётом (1) и (2), последние два слагаемых равны нулю (и неизвестный
вектор с пропал!)
(mn) =
2|а|² + 3(ab) — 2|b|².
Далее, воспользуемся формулой скалярного произведения векторов:
(ab) = |a|·|b|cosΨ.
Получим ( т.к. Ψ = 60⁰)
(mn) =
2|а|² + 3|a|·|b|cos60⁰ — 2|b|² = 2·2² + 3·2·3·0,5 — 2·3² =
-1.
Ответ:
(mn) = -1.
_____________________________________________________________________________
1.1.3-3.
Даны три силы: F₁ = {2; -5; 1}, F₂ =
{1; 2; -6}, F₃ =
{-4; -3; 3}, приложенные в одной точке. Вычислить, какую работу производит
равнодействующая этих сил, когда точка её приложения, двигаясь прямолинейно,
перемещается из точки M(4; 2; -8) в точку N(3;
-2; -5).
Решение:
X₁ = 2;
Y₁ = —
5; Z₁ = 1
− координаты силы F₁
X₂ = 1;
Y₂ = 2;
Z₂ = —
6 − координаты силы F₂
X₃ =
-4; Y₃ = —
3; Z₃ = 3
− координаты силы F₃
x₁ = 4;
y₁ = 2;
z₁ = —
8 − координаты точки М
x₂ = 3;
y₂ = —
2; z₂ = —
5 − координаты точки N
А − ?
Работа А равнодействующей этих сил равна скалярному произведению векторов F и s:
A = F·s, (1)
где F = F₁ + F₂ + F₃ −
вектор равнодействующей трёх сил; s − вектор перемещения.
Координаты
X, Y, Z
вектора F
равнодействующей трёх сил F₁ , F₂ , F₃ найдём по правилу сложения координат:
если F₁ = {X₁; Y₁; Z₁}, F₂ = {X₂; Y₂; Z₂}, F₃ = {X₃; Y₃; Z₃},
тогда F = {X; Y; Z} = {X₁ + X₂ + X₃; Y₁ + Y₂ + Y₃; Z₁ + Z₂ + Z₃}.
Имеем
F = {X; Y; Z} = {X₁ + X₂ + X₃; Y₁ + Y₂ + Y₃; Z₁ + Z₂ + Z₃} =
{2 + 1 + (-4); -5 + 2 + (-3); 1 + (-6) + 3} = {-1; -6; -2}.
Получили
F = {X; Y; Z} =
{-1; -6; -2},
т.е. X = —
1; Y = —
6; Z = —
2. (2)
Найдём координаты
x, y, z вектора s = MN. Координаты вектора MN равны
разностям соответствующих координат его конца и начала:
MN = {x₂ — x₁; y₂ — y₁; z₂ — z₁},
где M = (x₁; y₁; z₁) и N = (x₂; y₂; z₂).
Имеем:
s = {x; y; z} = MN = {x₂ — x₁; y₂ — y₁; z₂ — z₁} =
{3 — 4; -2 — 2; -5 — (-8)} = {- 1; — 4; 3}.
Получили
s = {x; y; z} = {-
1; — 4; 3}.
т.е. x = —
1; y = —
4; z = 3. (3)
Скалярное произведение векторов F и s:
F·s = X·x + Y·y + Z·z или ( см. (2) и (3) )
F·s =
-1·(-1) + (-6)·(-4) + (-2)·3 = 19.
Тогда
по (1) работа А равна
А = 19.
Ответ: А = 19.
_____________________________________________________________________________
1.1.3-4.
Найти проекцию вектора a = {4; 3; -7} на ось вектора b = {1;
-2; -2}.
Решение:
x₁ = 4;
y₁ = 3;
z₁ = —
7 − координаты вектора а
x₂ = 1;
y₂ = —
2; z₂ = —
2 − координаты вектора b
прba − ?
Для нахождения проекции вектора a на вектор b применим формулу
ab
прba = –––
, (1)
|b|
где ab = x₁ x₂ + y₁y₂ + z₁z₂ −
скалярное произведение векторов a и b; |b| − модуль вектора b.
Имеем
ab = x₁ x₂ + y₁y₂ + z₁z₂ = 4·1
+ 3·(-2) — 7·(-2) = 12,
квадрат модуля вектора b
|b|² = x₂² + y₂² + z₂² =
1² + (-2)² + (-7)² = 9, тогда |b| = 3 и по (1) получим
ab 12
прba = –––
= ––– = 4.
|b|
3
Ответ: прba = 4.
_____________________________________________________________________________
1.1.3-5.
Найти угол между векторами a и b, если вектор a +2b
перпендикулярен к вектору 5a — 4b и |a| = |b| = 1.
Решение:
a +2b
перпендикулярен 5a — 4b
|a| = |b| = 1
ϕ − ?
(угол между a и b)
Так как вектора a +2b и 5a — 4b перпендикулярны, то их скалярное произведение равно
нулю:
(a +2b)(5a — 4b) = 0.
(1)
Умножим скалярно левую часть в (1)
(a +2b)(5a — 4b) = 5aa — 4ab + 10ba — 8bb = (
т. к. aa = |a|², bb = |b|², ba = ab ) =
5|a|² — 4ab + 10ab — 8|b|² =
5·1² + 6ab —
8·1² = 6ab — 3.
Тогда (1) примет вид
6ab — 3 =
0, отсюда скалярное произведение ab векторов a и b
ab =
0,5.
Угол ϕ между
векторами a и b:
ab 0,5
cosϕ =
–––––– = ––– = 0,5. Отсюда ϕ = 60⁰.
|a|·|b| 1·1
Ответ: ϕ = 60⁰.
_____________________________________________________________________________
1.1.3-6.
Вектор а = {-4, 4, 6} задан в декартовом прямоугольном базисе. Чему равна его
проекция на ось аппликат?
Решение:
В скобках для вектора а = {-4, 4, 6} указаны его проекции соответственно на ось ОХ (ось абсцисс), OY (ось ординат) и OZ (ось аппликат): -4, 4, 6.
Ответ: 6.
1.1.3-7.
Найти прямоугольную проекцию вектора АВ на направление вектора АС. АВ и АС −
стороны треугольника в прямоугольной системе координат. Координаты точек: А (1;
-2), В (7; -1), С (3; 7).
Решение:
∆ ABC,
А (1; -2),
В (7; -1),
С (3; 7)
прАСAB − ?
Для нахождения проекции вектора AB на вектор AC применим формулу
AB·AC
прАСAB =
–––––– , (1)
|AC|
где AB·AC = x₁x₂ + y₁y₂ −
скалярное произведение векторов AB = {x₁; y₁} и AC = {x₂; y₂};
![]()
Имеем
x₁ = xB — xA = 7 —
1 = 6; y₁ = yB — yA = — 1
— (-2) = 1;
x₂ = xC — xA = 3 —
1 = 2; y₂ = yC — yA = 7 —
(-2) = 9.
Тогда скалярное произведение векторов AB и AC
AB·AC = x₁·x₂ + y₁·y₂ =
6·2 + 1·9 = 27.
Модуль вектора AC
![]()
И по (1) получим

Ответ:
____________________________________________________________________________________
1.1.4. Векторное произведение векторов.
1.1.4-1.
Найти векторное произведение векторов
a = 2i — 3j + 5k, b = 4i + 2j — 6k.
Решение:
x₁ = 2;
y₁ =
-3; z₁ = 5
− координаты вектора a
x₂ = 4;
y₂ = 2;
z₂ = -6
− координаты вектора b
[ab] − ?
Если вектора a и b
заданы координатами a = { x₁; y₁; z₁}, b = { x₂; y₂; z₂}, то их векторное произведение [ab]
равно
|i j k|
[ab] = |x₁ y₁ z₁| (1)
|x₂ y₂ z₂|.
По (1) имеем
|i j k|
(Разложим
[ab] = |2
-3 5| определитель = i(-1)¹⁺¹·|-3 5| + j(-1)¹⁺²·|2
5| + k(-1)¹⁺³·|2
-3| = i(18 —
10) — j(-12 —
20)+
|4 2 -6| по 1-й строке) |2 -6| |4 -6| |4 2|
+
k(4 +
12) = 8i + 32j + 16k.
[ab]
= 8i + 32j + 16k.
Ответ: [ab] = 8i + 32j + 16k.
_____________________________________________________________________________
1.1.4-2.
Дано: |a| = |b| = 5,
угол между векторами a и b равен π/4. Вычислить площадь треугольника, построенного на
векторах a — 2b и 3a + 2b.
Решение:
|a| = |b| = 5
α = π/4
(угол между векторами a и b)
S∆ − ?
(площадь треугольника, построенного на векторах a — 2b и 3a + 2b)
Площадь S
параллелограмма, построенного на векторах a — 2b и 3a + 2b равна
модулю векторного произведения этих векторов:
S = | [(a — 2b)(3a + 2b)] |.
Так как площадь треугольника S∆ , построенного на векторах a — 2b и 3a + 2b равна
половине площади параллелограмма, то, используя свойства векторного
произведения, получим
S∆ =
0,5·S =
0,5·| [(a — 2b)(3a + 2b)] | =
0,5·| 3[aa] + 2[ab] — 6[ba] — 4[bb] |.
Далее учтём формулы:
[aa] = 0,
[bb] = 0,
[ba] = —
[ab], | [ab] | =
|a||b|sinα.
Тогда
S∆ =
0,5·| 3[aa] + 2[ab] — 6[ba] — 4[bb] | =
0,5·| 2[ab] + 6[ab] | =
0,5·| 8[ab] | =
0,5·8| [ab] | =
= 4| [ab] | =
4|a||b|sinα =
4·5·5·sin(π/4) =
Ответ: S∆ =
_____________________________________________________________________________
1.1.4-3.
Вычислить площадь треугольника с вершинами А (-1; 0; 2), В (1; -2; 5), С (3; 0;
-4).

Решение:
А (-1; 0; 2),
В (1; -2; 5),
С (3; 0; -4)
S∆ − ?
(площадь треугольника АВС)
Находим сначала координаты векторов АВ и АС (см. рис.):
АВ = ( 1-(-1); -2-0; 5-2 ) = (2; -2; 3),
АС = ( 3-(-1); 0-0; -4-2 ) = (4; 0; -6).
Вычисляем векторное произведение векторов АВ и АС (разлагая определитель по 3-й
строке):

= 4(3j + 2k) — 6(-2i — 2j) = 12i + 24j + 8k.
Получили
[АВ·АС] = 12
i + 24j + 8k.
Вычислив модуль от полученного векторного произведения, найдём площадь Sпар параллелограмма ABDC,
построенного на векторах АВ и АС (см. рис.):
Sпар =
| [АВ·АС] | = | 12i + 24j + 8k | =![]()
Тогда
площадь треугольника АВС:
S∆ =(1/2)Sпар = 28/2 = 14.
Ответ: S∆ = 14.
_____________________________________________________________________________
1.1.4-4.
Дано разложение векторов a и b по векторам p и q: a = -3p + 2q, b = p + q. |p|= 2, |q|= 1, угол между векторами p и q равен
π/3.
Найти:
1) Длины диагоналей параллелограмма, построенного на векторах a и b;
2) Косинус угла между векторами a и b;
3) Площадь параллелограмма, построенного на векторах a и b.

Решение:
a = -3p + 2q
b = p + q
|p|= 2
|q|= 1
α = π/3
(угол между векторами p и q)
1) |a — b| − ?
(длина меньшей диагонали параллелограмма, построенного на векторах a и b);
|a + b| − ?
(длина большей диагонали параллелограмма, построенного на векторах a и b)
2) cosβ − ? (β −
угол между векторами a и b)
3) S − ? (
площадь параллелограмма, построенного на векторах a и b (см.
рис.) )
1. Найдём скалярное произведение векторов p и q:
(pq) = |p|·|q|cosα =
2·1·cos(π/3) =
2·1·(1/2) = 1.
(pq) = (qp) = 1.
(1)
Воспользуемся свойствами скалярного произведения векторов. С учётом (1), имеем:
|a — b|² =
|-3p + 2q — (p + q)|² =
|-3p + 2q — p — q|² = |q — 4p|² = (q — 4p)² = (q)² —
8(qp) + (4p)² = (q)² —
8·1 + 16(p)² = |q|² — 8
+ 16|p|² =
1² — 8 + 16·2² = 57, откуда

Аналогично имеем:
|a + b|² =
|-3p + 2q + p + q|² =
|3q — 2p|² =
(3q — 2p)² =
(3q)² —
12(qp) + (2p)² =
9(q)² —
12·1 + 4(p)² =
9|q|² —
12 + 4|p|² =
9·1² — 12 + 4·2² = 13, откуда

2. Косинус угла β определим по формуле:
(ab)
cosβ =
–––––– . (2)
|a||b|
С учётом (1), найдём скалярное произведение векторов а и b:
(ab) =
(-3p + 2q)(p + q) = -3p² — 3(pq) + 2(qp) + 2q² =
-3|p|² —
3·1 + 2·1 + 2|q|² =
-3·2² — 3 + 2 + 2·1² = -11.
(ab) =
-11. (3)
Имеем
|a|² =
|-3p + 2q|² =
(-3p + 2q)² =
(2q — 3p)² =
4q² —
12(qp) + 9p² =
4|q|² —
12·1 + 9|p|² =
4·1² — 12 + 9·2² = 28, откуда
 (4)
(4)
Далее имеем
|b|² = |p + q|² = (p + q)² = p² +
2(pq) + q² = |p|² +
2·1 + |q|² =
2² + 2 + 1² = 7, откуда
 (5)
(5)
С учётом (3), (4), (5), по (2) найдём косинус угла β:
![]() (6)
(6)
3. Площадь S
параллелограмма, построенного на векторах a и b равна
модулю векторного произведения этих векторов:
S = | [ab] | =
| |a||b|sinβ |.
(7)
С учётом (6), найдём sinβ по формуле sin²β + cos²β = 1 или sin²β + (-11/14)² = 1, отсюда
 (8)
(8)
С учётом (4), (5), (8), по (7) найдём площадь S
параллелограмма:
![]()
![]()
____________________________________________________________________________________
1.1.5. Смешанное произведение векторов.
1.1.5-1.
Докажите
что векторы p, a, b компланарны, если: а) один из данных векторов
нулевой; б) два из данных векторов коллинеарны.
Решение:
Если
смешанное произведение векторов a, b, c равно нулю
[ab]c = 0, (1)
то вектора a, b, c компланарны.
Здесь [ab] –
векторное произведение.
а) Пусть вектор а = 0. Тогда [ab] = [0•b] = 0 и [ab]c = 0•c = 0, равенство (1) выполняется, т.е. вектора a, b, c компланарны.
Пусть с = 0. Тогда [ab]c = [ab]•0 = 0, равенство (1) выполняется, т.е. вектора a, b, c компланарны.
б) Пусть вектора a, b коллинеарны, т.е. b = λa (λ –
скаляр). Тогда [ab] = [a(λa)] = λ[aа] = λ•0 = 0 и
[ab]c = 0•c = 0,
равенство (1) выполняется, т.е. вектора a, b, c компланарны.
Пусть вектора a, с
коллинеарны, т.е. с = λa. Тогда в координатах а = (x₀, y₀, z₀),
c = (λx₀, λy₀, λz₀), b = (x₁, y₁, z₁).
Запишем смешанное произведение в координатах:
|x₀ y₀ z₀ | (вынесем за знак) |x₀ y₀ z₀| (Определитель)
[ab]c = |x₁ y₁ z₁ | =
(определителя) = λ|x₁ y₁ z₁| =
0. (с равными)
|λx₀ λy₀ λz₀ | (общий множитель λ) |x₀ y₀ z₀| (строками = 0)
Равенство (1) выполняется, т.е. вектора a, b, c компланарны.
____________________________________________________________________________________
1.2. Прямая на плоскости.
1.2-1.
Записать уравнение прямой, заданной точкой М0(2; 3) и нормальным вектором n =
(-1; 2).
Решение:
М0(2; 3)
n =
(-1; 2)
уравнение прямой − ?
Воспользуемся уравнением прямой
А(х — х0) + В(у — у0) = 0, (1)
где n = (A; B) −
нормальный вектор прямой; М0(х0; у0) − фиксированная точка на прямой.
Имеем:
A = —
1; B = 2;
х0 = 2; у0 = 3.
Тогда по (1) искомое уравнение прямой имеет вид
-1·(х — 2) + 2(у — 3) = 0 или — х + 2 + 2у — 6 = 0, отсюда
— х + 2у — 4 = 0 ( умножим на (-1) )
х — 2у + 4 = 0.
Ответ: х — 2у + 4 = 0.
_____________________________________________________________________________
1.2-2.
Записать уравнение прямой, заданной точкой М0(-1; 2) и направляющим вектором s = (2;
3).
Решение:
М0(-1; 2)
s = (2;
3)
уравнение прямой − ?
Воспользуемся каноническим уравнением прямой
х — х0 у — у0
––––– = –––––, (1)
l m
где s = (l; m) −
направляющий вектор прямой; М0(х0; у0) − фиксированная точка на прямой.
Имеем:
l = 2; m = 3;
х0 = -1; у0 = 2.
Тогда по (1) уравнение прямой имеет вид
х + 1 у — 2
––––– = ––––– или 3(х + 1) = 2(у — 2), отсюда 3х + 3 = 2у — 4 или
2 3
3х — 2у +7 = 0 − искомое уравнение прямой.
Ответ:
3х — 2у + 7 = 0.
____________________________________________________________________________________
1.3. Плоскости и прямые.1.3-1. Написать
параметрическое уравнение прямой, проходящей через точку В(2; 0; 1)
перпендикулярно плоскости 3х — 2у + 5z — 6 = 0.Решение:
Параметрическое
уравнение прямой, проходящей через точку В(x₀; y₀; z₀) перпендикулярно плоскости Ax + By + Cz + D = 0:
{x = x₀ + At,
{y = y₀ + Bt, (1)
{z = z₀ + Ct.
Имеем:
A = 3, B = — 2, C = 5.
x₀ = 2; y₀ = 0; z₀ = 1.
Тогда система (1) примет вид:
{x = 2 + 3t
{y = -2t
{z = 1 + 5t.
Ответ: x = 2 + 3t, y = -2t, z = 1 + 5t.
_____________________________________________________________________________
1.3-2. Из
плоскости x — 2y + 3z — 6 =
0 координатными плоскостями высекается треугольник. Найти уравнение высоты
этого треугольника, опущенной из вершины, лежащей на оси 0Z.

Решение:
x — 2y + 3z — 6 =
0. (1)
Пусть ABC –
треугольник, высекаемый координатными плоскостями из плоскости (1) (см. рис.).
1. Для нахождения координат точек A, B, C запишем уравнение плоскости (1) в отрезках. Имеем из
(1)
x — 2y + 3z = 6,
делим на 6 и получаем уравнение плоскости (1) в отрезках:
x y z
–– + –– + –– = 1, (1*)
6 -3 2
где 6, -3, 2 – отрезки, отсекаемые плоскостью (1*) соответственно на оси OX, OY, OZ.
Координаты вершин треугольника ABC (см. рис.): A(6; 0; 0), B(0; 0; 2), C(0; -3; 0).
2. Уравнение прямой, проходящей через две точки:
x — x₁ y — y₁ z — z₁
––––– = ––––– = ––––– . (*)
x₂ — x₁ y₂ — y₁ z₂ — z₁
Найдём уравнение прямой СА. Имеем x₁ = 0, y₁ = -3, z₁ = 0 и x₂ = 6, y₂ = 0, z₂ = 0 – координаты точек С и А соответственно. Тогда
по (*) имеем
(x —
0)/(6 — 0) = (y +
3)/(0 + 3) = (z —
0)/(0 — 0) или
x — 0 y + 3 z — 0
–––– = –––– = –––– . (СА) (2)
6 3 0
Направляющий вектор s1 прямой СА (2) имеет проекции ( коэффициенты в
знаменателях (2) ): l₁ = 6, m₁ = 3, n₁ = 0, т.е. s1(6; 3; 0).
3. Уравнение искомой высоты DB, проходящей через точку В, ищем в каноническом виде
x — x₀ y — y₀ z — z₀
––––– = ––––– = ––––– ,
l m n
где x₀ = 0,
y₀ = 0,
z₀ = 2
– координаты точки В; l, m, n – проекции направляющего вектора s2(l; m; n)
прямой DB.
Имеем
x — 0 y — 0 z — 2
–––– = –––– = –––– . (DB) (3)
l m n
4. Вектор АВ = (0 — 6; 0 — 0; 2 — 0) = (-6; 0; 2). Поскольку векторы АВ = (-6;
0; 2), s1 = (6;
3; 0) и s2 = (l; m; n)
компланарны (т.е. лежат в одной плоскости), то их смешанное произведение равно
нулю, т.е. (АВ, s1, s2) = 0 или в виде

Разложим определитель по 1-й
строке
 отсюда
отсюда
-6(3n — 0)
+ 2(6m — 3l) = 0
или
l — 2m + 3n = 0.
(**)
5. Условие перпендикулярности прямых (2) и (3): равенство нулю скалярного
произведения векторов s1 = (l₁; m₁; n₁) и s2 = (l; m; n)
ll₁ + mm₁ + nn₁ = 0
или (т. к. l₁ =
-6, m₁ =
-3, n₁ = 0)
-6l — 3m = 0,
отсюда
2l + m = 0.
(***)
Таким образом, для определения координат вектора s2(l; m; n)
получаем систему уравнений (см. (**) и (***) )

Решаем относительно l и m. Из 2-го уравнения m = -2l и
подставим в 1-е. l — 2(-2l) + 3n = 0, отсюда l = (-3/5)n, тогда m = -2(-3/5)n = (6/5)n.
Подставляя выражения для l, m, n в каноническое уравнение прямой DB (3),
получаем
x — 0 y — 0 z — 2
–––––– = –––––– = –––– или, умножая эти равенства на n/5,
окончательно получим
(-3/5)n (6/5)n n
x — 0 y — 0 z — 2
–––– = –––– = –––– .
-3
6 5
Ответ: x — 0 y — 0 z — 2
–––– = –––– = –––– .
-3 6 5
_____________________________________________________________________________
1.3-3.
Найти угол между прямой x = 8 — 2t, y = 7 — 2t, z = 9 + 4t и плоскостью 6x — 3y — 3z + 1 =
0.
Решение:
l = —
2, m = —
2, n = 4;
A = 6, B = —
3, C = —
3.
ϕ − ?
Угол между прямой x = x₀ + lt, y = y₀ + mt, z = z₀ + nt и плоскостью Ax + By + Cz + D = 0 определяется формулой

Следовательно, ϕ = 30⁰.
Ответ: ϕ = 30⁰.
_____________________________________________________________________________1.3-4.
Найти точку пересечения плоскости
3x — 4y + 5z + 16
= 0 (1)
и прямой
x + 6 y — 7 z — 8
–––– = –––– = –––– . (2)
2 — 1 — 3
Решение:
Искомая точка принадлежит как прямой, так и плоскости. Для нахождения этой
точки решим совместно систему уравнений (1) — (2) плоскости и прямой. Для
удобства запишем уравнение прямой (2) в параметрическом виде. Вводим параметр t для
уравнения (2):
x + 6 y — 7 z — 8
–––– = –––– = –––– = t,
2 — 1 — 3
или x + 6 =
2t, y — 7 =
— t, z — 8 =
— 3t,
отсюда получим параметрическое уравнение прямой:
x = — 6
+ 2t, y = 7 —
t, z = 8 —
3t. (2*)
Подставим выражение для x, y, z из (2*) в уравнение плоскости (1)
3(- 6 + 2t) —
4(7 — t) +
5(8 — 3t) + 16
= 0.
После упрощения получим
— 5t + 10
= 0,
откуда t = 2.
Из уравнения прямой (2*) при t = 2 находим координаты точки пересечения
x = — 6
+ 2·2 = — 2, y = 7 —
2 = 5, z = 8 —
3·2 = 2.
Таким образом, искомой точкой пересечения является точка В(- 2; 5; 2).
Ответ:
В(- 2; 5; 2).
_____________________________________________________________________________
1.3-5.
Составить уравнение прямой, проходящей через точку А (1; 2; 3), пересекающей
ось ОZ и
перпендикулярной к прямой х = у = z.
Решение:
Каноническое уравнение прямой х = у = z:
x — x₀ y — y₀ z — z₀
–––– = –––– = –––– , (1)
m n l
где s (m; n; l) −
направляющий вектор прямой; М (x₀; y₀; z₀) − точка, лежащая на прямой;
x₀ = y₀ = z₀ = 0
и m = n = l = 1.
Так как искомая прямая проходит через точку А(1; 2; 3), то каноническое
уравнение этой прямой ищем в виде:
x — 1 y — 2 z — 3
–––– = –––– = –––– , (2)
m₁ n₁ l₁
где s₁ (m₁; n₁; l₁) −
направляющий вектор искомой прямой (2).
Условие перпендикулярности двух прямых (1) и (2):
mm₁ + nn₁ + ll₁ = 0
или (т.к. m = n = l = 1)
m₁ + n₁ + l₁ = 0.
(3)
По условию искомая прямая пересекает ось ОZ.
Уравнение оси OZ: x = y = 0.
Из (2) этому условию соответствует уравнение
0 — 1 0 — 2
–––– = –––– , отсюда следует
m₁ n₁
n₁ = 2m₁ .
(4)
Итак, для нахождения проекций m₁, n₁ и l₁ надо решить систему уравнений (3), (4). Подставляя n₁ = 2m₁ в
(3), получим
m₁ + 2m₁ + l₁ = 0,
отсюда находим
l₁ = —
3m₁. (5)
С учётом (4) и (5), уравнение искомой прямой (2) примет вид
x — 1 y — 2 z — 3 x — 1 y — 2 z — 3
–––– = –––– = –––– , отсюда окончательно получаем: –––– = –––– = –––– .
m₁ 2m₁ -3m₁ 1 2
-3
Ответ: x — 1 y — 2 z — 3
–––– = –––– = –––– .
1 2
-3
_____________________________________________________________________________
1.3-6.
Выяснить, принадлежит ли прямая
х — 13 у — 1 z — 4
––––– = –––– = –––– (1)
8 2 3
плоскости х — 2у — 4z + 1 = 0. (2)
Решение:
Прямая принадлежит плоскости тогда и только тогда, когда любые две точки этой прямой
лежат в плоскости. Проверим выполнение этого условия.
Каноническое уравнение прямой:
x — x₀ y — y₀ z — z₀
–––– = –––– = –––– , (1*)
m n l
где s {m; n; l} −
направляющий вектор прямой; М (x₀; y₀; z₀) − точка, лежащая на прямой;
Как видно из уравнений (1*) и (1) на прямой (1) лежит точка М (13; 1; 4).
Проверим, лежит ли точка М (13; 1; 4) на плоскости (2). Для этого подставим в
уравнение (2) вместо x, y, z соответствующие координаты точки М: x₀ =
13; y₀ = 1;
z₀ = 4.
Получим
13 — 2·1 — 4·4 + 1 = 0 или 13 — 2 — 16 + 1 = 0 или
— 4 = 0 (не верно!). (3)
Получили ложное равенство (3). Следовательно, точка М (13; 1; 4) не принадлежит
плоскости (2) и прямая (1) не принадлежит плоскости (2).
Ответ:
не принадлежит.
_____________________________________________________________________________
1.3-7.
Составить уравнение плоскости, проходящей через точку M (-2;
-3; 1) и отсекающей от координатных осей равные отрезки. Написать каноническое
уравнение перпендикуляра, опущенного из начала координат на эту плоскость.
Решение:
M (-2;
-3; 1)
Уравнение плоскости в отрезках:
x y z
–– + –– + –– = 1, (1)
a b c
где a, b, c −
отрезки, отсекаемые плоскостью соответственно на осях x, y, z.
По условию все эти отрезки равны, т.е. a = b = c и
тогда уравнение (1) примет вид
x y z
–– + –– + –– = 1, отсюда
a a a
x + y + z = а.
(1*)
По условию плоскость (1*) проходит через точку M (-2;
-3; 1). Подставляя в (1*) координаты точки М (x = -2, y = -3,
z = 1),
получим: -2 -3 + 1 = а. Отсюда а = — 4 и уравнение плоскости (1*) примет вид x + y + z = — 4
или
x + y + z + 4 =
0. (1**)
Запишем уравнение (1**) как общее уравнение плоскости:
Ax + By + Cz + D = 0,
где
A = B = C = 1 и
s = {A; B; C} =
{1; 1; 1} – вектор, перпендикулярный к плоскости (1**).
Каноническое уравнение перпендикуляра (прямой), опущенного из начала координат
О (x₀ = 0;
y₀ = 0;
z₀ = 0)
на плоскость (1**) запишем в виде:
x — x₀ y — y₀ z — z₀ x — 0 y — 0 z — 0
–––– = –––– = –––– или –––– = –––– = –––– или окончательно x = y = z.
A B
C 1 1 1
Ответ: x + y + z + 4 =
0; x = y = z.
_____________________________________________________________________________
1.3-8.
Найти проекцию точки М(0; -3; -2) на прямую
х — 1 у — 1,5 z
–––– = –––––– = ––– . (1)
1 -1 1
Решение:
1. Для удобства запишем уравнение 1-ой прямой (1) в параметрическом виде.
Вводим параметр t для уравнений (1):
х — 1 у — 1,5 z
–––– = –––––– = ––– = t,
1 -1 1
или x — 1 =
t, y — 1,5
= — t, z = t,
отсюда получим параметрические уравнения 1-ой прямой:
x = 1 +
t, y = 1,5
— t, z = t. (1*)
Параметрические уравнения 1-ой прямой (1*):
x = x₁ + l₁t, y = y₁ + m₁t, z = z₁ + n₁t, (*)
где x₁ = 1,
y₁ =
1,5, z₁ = 0
− координаты точки, через которую проходит 1-я прямая (1*); l₁ = 1,
m₁ =
-1, n₁ = 1
− проекции направляющего вектора 1-ой прямой (1*).
Аналогично, зададим параметрические уравнения 2-ой прямой, проходящей через
точку М:
x = x₂ + l₂s, y = y₂ + m₂s, z = z₂ + n₂s, (**)
где x₂ = 0,
y₂ =
-3, z₂ = -2
− координаты точки М(0; -3; -2), через которую проходит 2-я прямая (**); l₂, m₂, n₂ −
неизвестные (пока) проекции направляющего вектора 2-ой прямой; s −
текущий параметр, аналогичный параметру t в
(1*).
Тогда по (**) параметрические уравнения 2-й прямой:
x = l₂s, y = -3
+ m₂s, z = -2
+ n₂s. (2*)
2. Прямые (1*) и (2*) должны лежать в одной плоскости. Необходимым и
достаточным условием этого является равенство:
![]()
или

(2)
Разложим определитель по 1-му столбцу

= 1·(-2m₂ +
4,5n₂) +
1·(-2l₂ + n₂) +
1·(-4,5l₂ + m₂) =
-6,5l₂ — m₂ +
5,5n₂.
Тогда (2) примет вид
-6,5l₂ — m₂ +
5,5n₂ = 0.
(3)
3. Условие перпендикулярности двух прямых (1*) и (2*):
l₁l₂ + m₁m₂ + n₁n₂ = 0
или (с учётом l₁ = 1,
m₁ =
-1, n₁ = 1)
l₂ — m₂ + n₂ = 0.
(4)
Уравнения (3) и (4) образуют систему уравнений для неизвестных l₂, m₂, n₂:
{ -6,5l₂ — m₂ +
5,5n₂ = 0,
{ -6,5l₂ — m₂ = —
5,5n₂,
{ l₂ — m₂ + n₂ = 0
или { l₂ — m₂ = — n₂.
Решая последнюю систему уравнений относительно неизвестных l₂ и m₂,
получим l₂ =
(3/5)n₂, m₂ =
(8/5)n₂.
Полагая n₂ = 5,
получим l₂ = 3,
m₂ = 8.
Тогда параметрические уравнения 2-й прямой (2*) примут вид:
x = 3s, y = -3
+ 8s, z = -2
+ 5s.
(2**)
4. Точка N
пересечения двух перпендикулярных прямых (1*) и (2**) и есть искомая проекция точки М. Найдём точку N.
Приравнивая соответствующие координаты в (1*) и (2**), получим систему
уравнений
{ 1 + t = 3s,
{ 1,5 — t = -3
+ 8s,
{ t = -2
+ 5s.
Подставляя t = -2
+ 5s из
3-го уравнения системы в 1-е и 2-е, получим
{ 1 — 2 + 5s = 3s,
{ 1,5 — (-2 + 5s) = -3 + 8s, отсюда s = 0,5. Тогда t = -2
+ 5·0,5 = 0,5.
Подставляя значение t = 0,5 в (1*) или s = 0,5
в (2**) получим x = 1,5, y = 1, z = 0,5.
Итак, точка N (1,5;
1; 0,5) − точка пересечения двух перпендикулярных прямых (1*) и (2**). Точка N (1,5;
1; 0,5) − проекция точки M(0; -3; -2) на прямую (1).
Ответ: N (1,5; 1; 0,5).
____________________________________________________________________________________
1.4. Плоские фигуры второго порядка.
1.4.1. Эллипс.
1.4.1-1.
Составить уравнения касательных к эллипсу x²/6 + y²/4 = 1 параллельных прямой
x + 2y — 4 = 0.
Решение:
x²/6 + y²/4 = 1 (эллипс).
x + 2y — 4 = 0 –
(прямая). (*)
Составить уравнения касательных к эллипсу, параллельных данной прямой.
Запишем прямую (*) в виде
y = —x/2 +
2, где
k = -1/2
– её угловой коэффициент (коэффициент при x).
У параллельных прямых угловые коэффициенты равны, поэтому уравнение касательной
ищем в виде
y = —x/2 + b.
Точки пересечения последней прямой с эллипсом найдём из системы:
{ y = —x/2 + b, (1)
{ x²/6 + y²/4 =
1. (2)
Для касательной точки пересечения сливаются в одну, поэтому b
определяется из условия, что система (1), (2) имеет единственное решение.
Из (1) выразим x
x = 2b — 2y
и подставим в (2)
(2b — 2y)²/6 +
y²4 =
1, отсюда
11y² — 16by + 8b²-12 = 0.
Это уравнение имеет два равных корня, когда его дискриминант D = 0, т.е.
D =
(-16b)² — 4·11·(8b² — 12) = 0
или
b² = 11/2.
Откуда
b₁ = (√22)/2, b₂ = -(√22)/2.
Подставим найденные значения b в (1), получим уравнения касательных:
y = —x/2 +
(√22)/2,
y = —x/2 —
(√22)/2
или
x + 2y —
(√22)/2 = 0.
x + 2y +
(√22)/2 = 0.
Ответ: x + 2y —
(√22)/2 = 0; x + 2y +
(√22)/2 = 0.
_____________________________________________________________________________
1.4.1-2.
Составьте уравнение геометрического места точек на плоскости, если отношение
расстояния от каждой из них до точки А (1;0) и до прямой x = y равно
1/3.

Решение:
А (1;0) − точка (фокус)
y = x −
прямая (директриса)
Ԑ = r/d = 1/3
− эксцентриситет.
Так как эксцентриситет Ԑ < 1, то искомая линия − эллипс. r −
фокальный радиус любой точки M эллипса, d − её расстояние до соответствующей (односторонней)
директрисы (рис. 1).
Пусть (х; у) − старая система координат. Каноническое уравнение эллипса в новой
системе координат (X; Y), в которой прямая y = x будет
директрисой эллипса:
X² Y²
–– + –– = 1. (1)
a² b²
Найдём большую полуось (а), малую полуось (b) и
параметр с эллипса. Из ∆ ОАВ (рис. 1) находим расстояние АВ от левого фокуса А до левой директрисы (прямая OB)

(2)
Далее из свойств эллипса имеем
a² — c² = b², (3)
Ԑ = c/a. (4)
Так как Ԑ =
1/3, то из (4) имеем a = 3c. Тогда из (2) получим
![]()

Тогда из (3) имеем

отсюда
b =
1/4.
Тогда уравнение эллипса (1) примет вид:

На рис. 2 изображёны: данный эллипс в новой системе координат (O₁ ; X; Y),
старая система координат (O; x; y) и две директрисы, отстоящие от центра O₁ на
расстоянии

_____________________________________________________________________________1.4.1-3.
Составить каноническое уравнение эллипса, зная, что сумма полуосей равна 10,
расстояние между фокусами равно .
.
Решение:
a + b = 10,
(*)
2c = .
(**)
Каноническое уравнение эллипса − ?
Каноническое уравнение эллипса:
x² y²
–– + –– = 1, (1)
a² b²
где a, b −
полуоси эллипса.
Из условия (**) находим c² =
20. Так как для эллипса c² = a² — b² или 20 = (a + b)(a — b) и, с учётом (*), получим 20 = 10(a — b) или a — b = 2.
Получили систему двух уравнений для a и b:
{ a + b = 10,
{ a — b = 2.
Сложив эти уравнения, получим 2a = 12, отсюда а = 6. Тогда из 2-го уравнения системы:
6 — b = 2,
откуда b = 4 и
уравнение (1) примет вид
x² y²
–– + –– = 1.
36
16
Ответ: x² y²
–– + –– = 1.
36 16
_____________________________________________________________________________
1.4.1-4.
Записать уравнение окружности, проходящей через указанные точки и имеющий центр
в точке A.
Фокусы эллипса 3x² + 4y² = 12; A — его верхняя вершина.
Решение:
3x² + 4y² =
12. (1)
В данной задаче необходимо найти уравнение окружности, проходящей через точки F₁ и F₂ и
имеющий центр в точке A, где F₁ и F₂ − фокусы эллипса, А − верхняя вершина эллипса.
1. Приведём уравнение эллипса (1) к каноническому виду. Делим (1) на 12
3x²/12 +
4y²/12 =
1 или x²/4 + y²/3 =
1 или
x²/(2²)
+ y²/(√3)²
= 1. (1*)
Уравнение (1*) − каноническое уравнение эллипса с полуосями a = 2 и
b = √3.
Фокусы эллипса:
F₁ (-с;
0), F₂ (с;
0), (*)
где параметр с найдём из уравнения a² — c² = b² или 2² — c² = (√3)², отсюда с = 1. Тогда по (*) имеем
F₁ (-1;
0), F₂ (1;
0). (2)
Для нахождения верхней вершины эллипса (точки А), подставим в (1) значение х =
0:
4y² =
12, отсюда у = √3. Получили координаты точки А:
А(0; √3). (3)
2. Каноническое уравнение окружности с центром в точке А (х₀; у₀) и радиусом R:
(x —
х₀)² + (y —
у₀)² = R².
(**)
Подставим сюда х₀ = 0, у₀= √3 ( см. (3) ). Получим
x² + (y —
√3)² = R². (4)
Для нахождения радиуса R, вспомним, что окружность проходит через точки F₁ и F₂ .
Поэтому, подставляя в (4) координаты, например, точки F₁ (
см. (2) ), получим:
(-1)² + (0 — √3)² = R², отсюда R² = 4.
Тогда уравнение искомой окружности (4) примет вид:
x² + (y —
√3)² = 4.
Ответ: x² + (y — √3)² = 4.
____________________________________________________________________________________
1.4.4. Плоские фигуры второго порядка.
1.4.4-1.
Установить, какая линия определяется данным уравнением
16x² + y² — 32x — 8y — 48
= 0.
Изобразить линию на чертеже.
Решение:
16x² + y² — 32x — 8y — 48
= 0. (1)

Выделяя полные квадраты, преобразуем левую часть (1):
(16x² — 32x) + (y² — 8y) — 48
= 0,
16(x² — 2x) + (y² — 8y) — 48
= 0,
16(x² — 2x + 1 —
1) + (y² —
2·4·y + 4²
— 16) — 48 = 0,
16( (x — 1)²
— 1) + ( (y — 4)²
— 16) — 48 = 0,
16(x — 1)²
— 16 + (y — 4)²
— 16 — 48 = 0,
16(x — 1)²
+ (y — 4)²
= 80, (разделим обе части на 80)
16(
x — 1)²
(y — 4)²
–––––––– + –––––– = 1,
80 80
(
x — 1)²
(y — 4)²
–––––– + –––––– = 1.
5 80
Вводя новые координаты по формулам X = x — 1, Y = y — 4, получаем уравнение эллипса

Из формул преобразования X = x — 1, Y = y — 4,
полагая X = Y = 0,
находим координаты центра эллипса: x = 1, y = 4, в точке О₁ (1; 4) (см. рис.).
_____________________________________________________________________________
1.4.4-2. Установить, какая линия определяется уравнением
4x² — 9y² — 16x — 18y — 29 = 0.
Изобразить линию на чертеже.

Решение:
4x² — 9y² — 16x — 18y — 29 = 0. (1)
Выделяя полные квадраты, преобразуем левую часть (1):
(4x² — 16x) + (-9y² — 18y) — 29 = 0,
4(x² — 4x) — 9(y² + 2y) — 29 = 0,
4(x² — 2·2·x + 2² — 4) — 9(y² + 2·1·y + 1² — 1) — 29 = 0,
4( (x — 2)² — 4 ) — 9( (y + 1)² — 1 ) — 29 = 0,
4(x — 2)² — 16 — 9(y + 1)² + 9 — 29 = 0,
4(x — 2)² — 9(y + 1)² = 36, (разделим обе части на 36)
4(x — 2)² 9(y + 1)²
––––––– − ––––––– = 1,
36 36
(x — 2)² (y + 1)²
–––––– − –––––– = 1.
9 4
Вводя новые координаты по формулам X = x — 2, Y = y + 1, получаем уравнение гиперболы
X² Y²
––– − ––– = 1
3² 2²
с полуосями а = 3 и b = 2. Из формул преобразования X = x — 2, Y = y + 1, полагая X = Y = 0, находим координаты центра гиперболы: x = 2, y = — 1, в точке О₁ (2; — 1) (см. рис.).
____________________________________________________________________________________
Поделитесь с друзьями, знакомыми и однокурсниками:
13
Система сходящихся сил
2.1. Приведение системы сходящихся сил к равнодействующей
Силы
называются сходящимися, если линии
действия всех сил, составляющих систему,
пересекаются в одной точке.
Простейший
случай трех сил был рассмотрен в главе I.
Здесь рассматривается общий случай
произвольного числа сил, образующих
систему.
Существует немало
практических задач, которые требуют
исследования систем сходящихся сил; в
частности, они возникают при расчетах
шарнирно-стержневых систем (ферм). Кроме
того, изучение системы сходящихся сил
необходимо для дальнейших обобщений,
относящихся к произвольной пространственной
системе сил.
Прежде всего
докажем теорему:
Система
сходящихся сил эквивалентна одной силе
(равнодействующей), которая равна сумме
всех этих сил и проходит через точку
пересечения их линий действия.
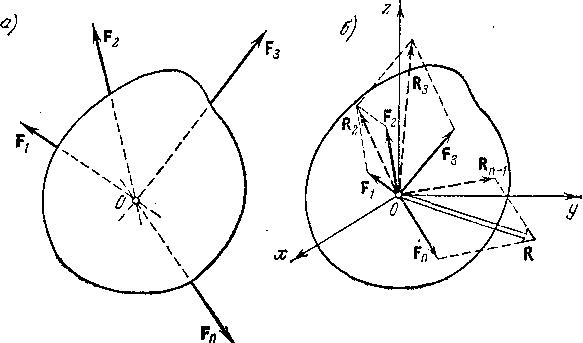
Пусть
задана система сходящихся сил
![]()
,
приложенных к абсолютно твердому телу
(рис. 2.1 а).
Согласно следствию из аксиомы 1
перенесем точки приложения сил по линиям
их действия в точку пересечения этих
линий (рис. 2.1 б).
Таким образом, мы получаем систему сил,
приложенных в одной точке. Она эквивалентна
исходной системе сходящихся сил.
Складывая теперь силы
![]()
и
![]()
,
на основании аксиомы 3 получим их
равнодействующую:
![]()
.
Индекс
в обозначении равнодействующей
соответствует номеру добавляемой силы
.
Затем, сложив силу
![]()
с силой
![]()
,
найдем
![]()
.
Сила
R3
является равнодействующей трех сил,
![]()
,
и равна их сумме. Дойдя, таким образом,
до последней силы
![]()
,
получим равнодействующую
![]()
всей системы
![]()
данных сил
![]()
. (2.1)
Этим соотношением
и доказывается справедливость
сформулированной теоремы.
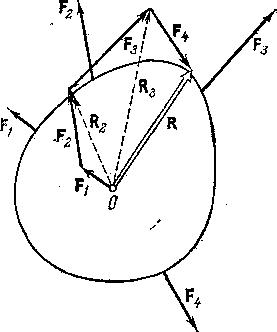
Построение
равнодействующей может быть упрощено,
если вместо параллелограммов построить
силовой многоугольник. Пусть,
например,
|
система отложить вектор , , |
Рис. 2.1. |
помещая
его начало в конце вектора
.
Тогда мы получим вектор
![]()
,
идущий от точки
к концу вектора
.
Наконец, точно так же добавим вектор
![]()
;
при этом получим, что вектор, идущий от
начала первого вектора
к концу
вектора
,
является равнодействующей
.
Пространственный
многоугольник, который получен указанным
образом, называется силовым
многоугольником.
|
На направлена по замыкающей силового и т.д. строить не нужно. |
Рис. 2.2. |
Если
для нахождения равнодействующей при
помощи силового многоугольника
используются правила геометрии или
тригонометрии, то такой способ нахождения
равнодействующей называется геометрическим
способом.
В
случае плоской системы сил можно
воспользоваться плоским чертежом,
откладывая силы в некотором масштабе;
равнодействующая определяется
непосредственным измерением по чертежу.
Такой способ ее нахождения называется
графическим.
Наиболее
общим способом определения модуля и
направления равнодействующей является
аналитический
способ,
который также
вытекает из основного соотношения
(2.1). Поместим, например, начало прямоугольной
системы координат в точку пересечения
линий действия сил (см. рис. 2.1);
тогда, пользуясь теоремой (она доказывается
в курсе векторной алгебры), согласно
которой проекция суммы векторов на
некоторую ось равна сумме проекций на
ту же ось слагаемых векторов, получим
(2.2)
где
![]()
– проекции
силы
![]()
на указанные
оси, a
![]()
–
проекции
равнодействующей на те же оси.
Итак,
проекции
равнодействующей системы сходящихся
сил на координатные оси равны алгебраическим
суммам проекций этих сил на соответствующие
оси.
С
помощью выражений (2.2) можно найти модуль
равнодействующей и ее направление в
прямоугольной системе координат
![]()
.
Так
как составляющие равнодействующей
системы сил
![]()
, ![]()
, ![]()
(2.3)
взаимно перпендикулярны
(рис. 2.1), то модуль равнодействующей
равен

. (2.4)
Направляющие
косинусы равнодействующей соответственно
равны
![]()
, ![]()
, ![]()
. (2.5)
В
частном случае, когда все силы расположены
в одной плоскости, удобно выбрать систему
координат
в плоскости
расположения сил. Тогда проекции всех
сил на ось
![]()
равны нулю и
вместо формул (2.2), (2.4) и (2.5) будем иметь
(2.6)
. (2.7)
,
. (2.8)
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Содержание:
- Система сходящихся сил
- Равнодействующая системы сходящихся сил
- Разложение силы по заданным направлениям
- Разложение силы по двум заданным направлениям
- Разложение силы по трем заданным направлениям
- Проекция силы на ось и плоскость
- Аналитический способ определения равнодействующей
- Условия и уравнения равновесия системы сходящихся сил
- Геометрическое условие равновесия
- Аналитические условия равновесия. Уравнения равновесия
- Методика решения задач на равновесие
- Примеры решения задач на равновесие под действием системы сходящихся сил
- Система сходящихся сил и решение задач
- Условия равновесия системы совпадающих сил
- Геометрический метод решения задач
- Аналитический метод решения задач
- Проекция силы на ось и на плоскость
- Аналитические условия равновесия системы совпадающих сил
- Образец выполнения и решения задач на темы С2
- Система сходящихся сил на плоскости
- Геометрическое условие равновесия системы сходящихся сил
- Геометрический метод решения задач
- Аналитические условия равновесия системы сходящихся сил
- Примеры решения задач на тему: Система сходящихся сил
Система сходящихся сил — это такая система сил, действующих на абсолютно твёрдое тело, в которой линии действия всех сил пересекаются в одной точке. Такая система сил является на плоскости статически определимой, если число неизвестных сил в ней не больше двух.
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Система сходящихся сил
Определение:
Система сил, линии действия которых пересекаются в одной точке, называется системой сходящихся сил. Системы сходящихся сил могут быть плоскими и пространственными.
Нехай на тверде тіло діє система збіжних сил , лінії дії яких перетинаються в точці О (рис. 2.1, а).
, лінії дії яких перетинаються в точці О (рис. 2.1, а).

Используя теорему 1.1, § 1.3, перенесем силы вдоль линий их действия в точку В и получим эквивалентную систему сил, приложенных к твердому телу в одной точке (рис. 2.1, б), которую еще называют пучком.
Равнодействующая системы сходящихся сил
Силы, приложенные в одной точке твердого тела, можно добавлять, используя аксиому о параллелограмм сил. Пусть к телу в точке О приложена система n сходящихся сил  (рис. 2.2, а).
(рис. 2.2, а).
Найдем равнодействующую  сил
сил  и
и  (рис. 2.2, а):
(рис. 2.2, а):

(индекс в обозначении равнодействующей соответствует количеству положительных сил).

К равнодействующей  добавим силу
добавим силу  . Получим
. Получим

Составим равнодействующую  с последней силой
с последней силой  и получим равнодействующую n сил. Итак,
и получим равнодействующую n сил. Итак,  есть система сходящихся сил эквивалентна одной силе — равнодействующей, которая равна векторной сумме этих сил и приложена в точке пересечения линий их действия
есть система сходящихся сил эквивалентна одной силе — равнодействующей, которая равна векторной сумме этих сил и приложена в точке пересечения линий их действия 
Как видно из рис. 2.2, б, построение параллелограммов сил эквивалентна построении векторного многоугольника сил. Для системы сил, изображенной на рис. 2.2, б, векторный многоугольник сил построим следующим образом: к концу вектора  присоединим вектор, геометрически ровный
присоединим вектор, геометрически ровный  , а с его конца отложим вектор
, а с его конца отложим вектор  и так далее. Вектор, проведенный из точки приложения первой силы
и так далее. Вектор, проведенный из точки приложения первой силы до конца вектора
до конца вектора  , является равнодействующей силой
, является равнодействующей силой  . Полученный таким образом многоугольник
. Полученный таким образом многоугольник  называется силовым или многоугольником сил.
называется силовым или многоугольником сил.
Замыкающая сторона силового многоугольника, которая направлена против его обхода, определяет равнодействующую как по величине, так и по направлению (Рис. 2.2, б). Определение равнодействующей системы сходящихся сил по правилу параллелограмма или силового многоугольника называется геометрическим способом определения равнодействующей.
В случае плоской системы сходящихся сил силовой многоугольник используется для графического определения равнодействующей. Изображая силы в определенном масштабе, величину равнодействующей силы определим непосредственным измерением ее на чертеже. Геометрический способ определения равнодействующей используется в графостатици.
Разложение силы по заданным направлениям
Разложить данную силу на несколько составляющих — значит найти такую систему нескольких сил, для которых данная сила равнодействующей. Эта задача является
неопределенной и имеет однозначное решение лишь при задании дополнительных условий. Такими дополнительными условиями могут, например, быть: 1) задания двух направлений, вдоль которых должны действовать составляющие силы; 2) задания
модулей обеих составляющих сил; 3) задания модуля одной составляющей силы и
направление второй. Рассмотрим два частных случая.
Разложение силы по двум заданным направлениям
Задача сводится к построению такого параллелограмма, у которого сила, которая разлагается, является диагональю, а стороны параллельны заданным направлениям. Например, на рис. 2.3, а, показано, что сила  розкладаеься по направлениям АВ и AD на силы
розкладаеься по направлениям АВ и AD на силы  и
и  — составляющие силы
— составляющие силы  (сила
(сила  и прямые АВ и АD лежат в одной плоскости).
и прямые АВ и АD лежат в одной плоскости).
Разложение силы по трем заданным направлениям
Если заданные направления АВ, АС и АD не лежащих в одной плоскости, то задача является определенной и сводится к построению такого параллелепипеда, в которого диагональ является заданной силой  , а ребра параллельны заданным направлениям и определяют составляющие
, а ребра параллельны заданным направлениям и определяют составляющие  (рис. 2.3, б).
(рис. 2.3, б).

Проекция силы на ось и плоскость
Аналитический способ решения задач статики основывается на понятии о проекции силы на ось. Проекция силы на ось является алгебраическая величина, равная произведению модуля силы на косинус угла между положительным направлением оси и силой (Рис. 2.4)


Отметим, что:

Проекцией силы  на плоскость Oxy называется вектор
на плоскость Oxy называется вектор , который
, который
соединяет проекции начала и конца вектора  на эту плоскость (рис. 2.5).
на эту плоскость (рис. 2.5).

В отличие от проекции силы на ось, проекция силы на плоскость является векторной величиной. Она характеризуется не только своим модулем, но и направлением в плоскости Oxу. Модуль проекции силы на плоскость

где θ — угол между направлением силы  и плоскостью. В некоторых случаях для определения проекции силы на ось выгоднее найти сначала ее проекцию на плоскость,
и плоскостью. В некоторых случаях для определения проекции силы на ось выгоднее найти сначала ее проекцию на плоскость,
в которой эта ось лежит, а потом найденную проекцию на плоскость спроектировать на эту ось.
Например, в случае, изображенном на рис. 2.5, таким способом найдем, что:

При решении многих задач механики удобно задавать силу через ее проекции на оси прямоугольной декартовой системы координат (рис. 2.6):

 где
где  , — проекции силы
, — проекции силы  на соответствующие оси координат;
на соответствующие оси координат;  — единичные орты осей
— единичные орты осей  По известным проекциями силы на оси координат можно определить модуль силы и углы, которые она образует с координатными осями, по формулам:
По известным проекциями силы на оси координат можно определить модуль силы и углы, которые она образует с координатными осями, по формулам:

Аналитический способ определения равнодействующей
Кроме геометрического существует еще и аналитический способ определения равнодействующей системы сходящихся сил. Если равенство (2.1) спроектируем на оси
декартовой системы координат (рис. 2.2, а), то получим:

где  — проекции равнодействующей
— проекции равнодействующей  на оси координат;
на оси координат;  , — проекции силы
, — проекции силы  на оси координат.
на оси координат.
Итак, проекция равнодействующей системы сходящихся сил на эту ось равна алгебраической сумме проекций составляющих сил на эту же ось.
Поскольку формулы (2.7) определяют проекции равнодействующей на три взаимно перпендикулярные оси, то модуль и направление равнодействующей  вычисляются по формулам:
вычисляются по формулам:

Условия и уравнения равновесия системы сходящихся сил
По определению уравновешенной системы сил имеем

а для системы сходящихся сил (см. § 2.2) получили

Сравнивая эквивалентности (а) и (б), получим векторное условие равновесия: для равновесия системы сходящихся сил необходимо и достаточно, чтобы ее равнодействующая была равна нулю:

Векторное равенство (2.9) является необходимым и достаточным условием равновесия
системы сходящихся сил. Условия, которым при этом должны удовлетворять самые силы, можно выразить в геометрической или аналитической форме.
Геометрическое условие равновесия
Как известно, равнодействующая — это замыкающая сторона силового многоугольника (рис. 2.2, б). Условие (2.9) будет выполняться только тогда, когда конец последней силы совместится с началом первой силы при построении силового многоугольника, то есть когда силовой многоугольник будет замкнутым. Необходимым и достаточным условием равновесия системы сходящихся сил есть замкнутость ее силового многоугольника (рис. 2.2, в).
Аналитические условия равновесия. Уравнения равновесия
Аналитические условия равновесия системы сходящихся сил вытекают из условия (2.9), согласно которой модуль равнодействующей равна нулю. Используя формулу (2.8), получаем или, согласно с (2.7),
или, согласно с (2.7),

Это означает, что для равновесия системы сходящихся сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на три взаимно перпендикулярные
оси равны нулю.
Равенства (2.10) называются аналитическими условиями равновесия системы сходящихся сил.
Для случая плоской системы сходящихся сил будем иметь:

Итак, задачи на равновесие системы сходящихся сил можно решать двумя способами — геометрически и аналитически. Первый способ удобен для плоской системы сходящихся сил.
Аналитические условия равновесия (2.10) или (2.11), расписаны для конкретной задачи, в которые входят неизвестные параметры, реакции связей, активные силы, расстояния, углы и т.д., называются уравнениями равновесия.
При решении задач статики реакции связей всегда есть неизвестными величинами. Для их определения используют условия равновесия той или другой системы сил.
Задачи, в которых число неизвестных величин равно числу уравнений равновесия, в которые они входят, называются статически определенными. Системы, для которых это имеет место, называются статически определенными.
Задачи, в которых число неизвестных величин больше, чем число уравнений равновесия, в которые входят эти величины, называются статически неопределенными. Системы, для которых это имеет место, называются статически неопределенными.
Методика решения задач на равновесие
Все задачи на равновесие желательно решать по такой методике.
1. Следуя масштаба, сделать четкий схематический рисунок к задачи.
2. Выбрать объект равновесия. Последним может быть точка, тело или
система тел, к которым приложено заданные и неизвестные силы. Если заданы
силы действуют на одно тело, а неизвестные — на второе, то необходимо рассматривать
равновесие системы тел в целом или последовательно равновесие каждого тела.
3. Изобразить на рисунке все заданные силы, приложенные к объекту равновесия.
4. Условно освободить объект равновесия от наложенных связей, а их действие заменить реакциями связей. Изобразить на рисунке реакции связей.
5. Выяснить, какая система сил действует на объект равновесия и условия равновесия рационально использовать.
6. В соответствии с условиями равновесия составить уравнение равновесия или выполнить соответствующие графические построения.
7. Решить уравнение равновесия, найти неизвестные величины и проанализировать полученные результаты.
Все расчеты в процессе решения задачи рекомендуется выполнять в общем виде, а числовые значения подставлять только в конечные алгебраические выражения.
Примеры решения задач на равновесие под действием системы сходящихся сил
Задача 2.1. Однородная горизонтальная балка, вес которой , содержится в равновесии шарнирно-неподвижной опорой А и шарнирнорухомою опорой В (рис. 2.7). Определить реакции опор.
, содержится в равновесии шарнирно-неподвижной опорой А и шарнирнорухомою опорой В (рис. 2.7). Определить реакции опор.
Решение. Объектом равновесия выберем балку АВ, на которую действует одна заданная сила приложенная посередине длины балки (рис. 2.7, б).
приложенная посередине длины балки (рис. 2.7, б).

Мысленно освободимся от связей. Линия действия реакции  перпендикулярна к плоскости, на которую опирается шарнирно-подвижная опора В. Известная точка приложения реакции
перпендикулярна к плоскости, на которую опирается шарнирно-подвижная опора В. Известная точка приложения реакции (точка А). Очевидно, что балка находится в равновесии под действием трех непараллельных сил, которые лежат в одной плоскости. Найдем точку пересечения линий их действия. Для этого продолжим линии действия сил
(точка А). Очевидно, что балка находится в равновесии под действием трех непараллельных сил, которые лежат в одной плоскости. Найдем точку пересечения линий их действия. Для этого продолжим линии действия сил  и
и  до пересечения в точке О. Согласно теореме о трех непараллельных силах, линия действия реакции
до пересечения в точке О. Согласно теореме о трех непараллельных силах, линия действия реакции  должна пройти через точку В (по линии АО) (Рис. 2.7, б).
должна пройти через точку В (по линии АО) (Рис. 2.7, б).
Балка находится в равновесии под действием трех сходящихся сил  . Используем геометрическое условие равновесия и построим замкнутый треугольник сил (рис. 2.7, в). Для этого в выбранном масштабе отложим вектор силы
. Используем геометрическое условие равновесия и построим замкнутый треугольник сил (рис. 2.7, в). Для этого в выбранном масштабе отложим вектор силы  с начала которого проведем прямую, параллельную линии АО, а с конца — прямую, параллельную линии ВО. Точка пересечения этих прямых определит конец вектора
с начала которого проведем прямую, параллельную линии АО, а с конца — прямую, параллельную линии ВО. Точка пересечения этих прямых определит конец вектора  и начало вектора
и начало вектора  . С треугольника сил определим величины неизвестных реакций
. С треугольника сил определим величины неизвестных реакций  и
и  .
.
Поскольку в  , а линия действия силы
, а линия действия силы  является медианой и высотой основы АВ, поэтому также
является медианой и высотой основы АВ, поэтому также  . Перенесем найдены углы на силовой треугольник. Решив его, получим
. Перенесем найдены углы на силовой треугольник. Решив его, получим

Задача 2.2. Вертикальный стояк подъемного крана опирается на подпятник A и подшипник В (рис. 2.8, а). В точке С действует вертикальная нагрузка Р = 20 кН. Высота стояка АВ равна 2 м, вылет стрелы крана — 4 м. Найти опорные реакции при условии, что кран находится в
равновесии.
Решение. Рассмотрим равновесие крана. На него действует заданная сила приложена в точке С. Применим принцип освобождения от связей и найдем направление реакций связей. Линия действия реакции в подшипнике
приложена в точке С. Применим принцип освобождения от связей и найдем направление реакций связей. Линия действия реакции в подшипнике  — горизонтальная; линия действия реакции подпятника
— горизонтальная; линия действия реакции подпятника  — неизвестно. поскольку три силы
— неизвестно. поскольку три силы  , взаимно уравновешенные (кран находится в равновесии), лежат в одной плоскости и непараллельные, то они должны пересекаться в одной точке согласно теореме о трех силы. Найдем точку пересечения D линий действия сил
, взаимно уравновешенные (кран находится в равновесии), лежат в одной плоскости и непараллельные, то они должны пересекаться в одной точке согласно теореме о трех силы. Найдем точку пересечения D линий действия сил  и
и  и соединим с ней точку А (рис. 2.8, б). прямая AD будет линией действия реакции
и соединим с ней точку А (рис. 2.8, б). прямая AD будет линией действия реакции  . Данную задачу также решим, используя геометрическую условие равновесия сходящейся системы сил. построим
. Данную задачу также решим, используя геометрическую условие равновесия сходящейся системы сил. построим
замкнутый силовой треугольник (рис. 2.8, в). Видим, что треугольник сил подобен треугольника АВD (рис. 2.8, б). С подобия треугольников записываем отношение соответствующих сторон:

откуда определяем величины реакции связей  и
и 


Задачи 2.1, 2.2 могут быть решены аналитическим способом, с использованием условий равновесия произвольной плоской системы сил (см. раздел 6).
Задача 2.3. Груз Р весом 2 кН содержится в равновесии лебедкой D с помощью каната, перекинутого через блок B (рис 2.9, а). пренебрегая трением на блоке, определить усилия в стержнях AB и CВ, считая, что крепления в точках A, B и С — шарнирные. Углы показано на рис. 2.9, а. Размерами блока и весом стержней пренебречь.
Решение. Объект равновесия выбираем блок B, который рассматриваем как точку. К нему приложена заданная сила тяжести груза  . Мысленно освободимся от связей и заменим действие их на блок В реакциями связей. Поскольку стержни АВ и ВС погружены в точке В, а их соединения — шарнирные, то они могут быть только или растянутыми или сжатыми,
. Мысленно освободимся от связей и заменим действие их на блок В реакциями связей. Поскольку стержни АВ и ВС погружены в точке В, а их соединения — шарнирные, то они могут быть только или растянутыми или сжатыми,
то есть реакции стержней будут направлены вдоль их осей.
Стержень АВ является растянутый, поэтому его реакция  будет направлена от точки В к
будет направлена от точки В к
точки А, стрижень ВС — сжат, и его реакция  направлена от точки С к точке В. Натяжение каната ВD будет направлен по линии каната, и, поскольку трением между блоком и канатом
направлена от точки С к точке В. Натяжение каната ВD будет направлен по линии каната, и, поскольку трением между блоком и канатом
пренебрегаем, то .
.

На блок В действует система сходящихся сил, расположенных в плоскости рисунка. Для решения задачи используем аналитические условия равновесия. Для этого выберем систему координат с началом в точке В (рис. 2.9, б) и запишем два уравнения равновесия (2.11):

Решим эти уравнения и определим неизвестные величины:

Анализируя полученные результаты, мы видим, что усилия  и
и  полученные со знаком «+». Это означает, что действительно стержень AB работает на растяжение, а стержень ВС — на сжатие.
полученные со знаком «+». Это означает, что действительно стержень AB работает на растяжение, а стержень ВС — на сжатие.
Задача 2.4. Найти усилия, возникающие в стержнях АВ, АС и AD (рис. 2.10) под действием
силы  и силы тяжести груза
и силы тяжести груза  подвешенного в точке А. Плоскость прямоугольника АВОС — горизонтальная, крепления стержней в точках A, B, C, D — шарнирные, сила
подвешенного в точке А. Плоскость прямоугольника АВОС — горизонтальная, крепления стержней в точках A, B, C, D — шарнирные, сила  и груз Р находятся в вертикальной плоскости OAD. углы показаны на рисунке.
и груз Р находятся в вертикальной плоскости OAD. углы показаны на рисунке.
Решение. Объект равновесия выберем узел А. На него действуют заданные силы  и
и  Мысленно освободим узел А от связей. Реакции идеальных жестких стержней
Мысленно освободим узел А от связей. Реакции идеальных жестких стержней  и
и  направлены по осям стержней.
направлены по осям стержней.
На узел А действует пространственная система сходящихся сил. Выберем систему координат с началом в точке О и запишем уравнение равновесия (2.10):



Решим полученную систему уравнений и определим неизвестные величины усилий в стержнях:

Полученные результаты свидетельствуют о том, что стержни АВ и АС работают на растяжение, а стержень АD — на сжатие.
Система сходящихся сил и решение задач
Система сходящихся сил — это такая система сил, действующих на абсолютно твёрдое тело, в которой линии действия всех сил пересекаются в одной точке. Такая система сил является на плоскости статически определимой, если число неизвестных сил в ней не больше двух.
Условия равновесия системы совпадающих сил
Совпадающими называются силы, линии действия которых
пересекаются в одной точке.
Если все силы по линиям их действия перенести в эту точку, то получим эквивалентную систему сил, которая приложена к одной точке. Равнодействующая  системы прилагаемых к одной точки сил, приложенная к той же точке и изображается замыкающим вектором силового многоугольника, который построен на прибавляемых силах. Равнодействующая
системы прилагаемых к одной точки сил, приложенная к той же точке и изображается замыкающим вектором силового многоугольника, который построен на прибавляемых силах. Равнодействующая  равняется векторной сумме прибавляемых сил:
равняется векторной сумме прибавляемых сил:

Поскольку система смежных сил может быть заменена одной силой (равнодействующей), то необходимым и достаточным условием равновесия тела под действием системы совпадающих сил является равенство нуля этого равнодействующего:

Геометрически это уравнение означает, что в построенном многоугольнике конец последнего вектора совпадает с началом первого, то есть многоугольник представляет
собой замкнутую фигуру.
В случае, когда на тело действуют три уравновешенные совпадающие силы, силовой (векторный) многоугольник сводится к силовому треугольнику. Решение задачи на равновесие в этом случае сводится к нахождению сторон треугольника с помощью тригонометрических формул.
Теорема о трех непараллельных силах. Если тело находится в равновесии под действием трех непараллельных сил, то линии действия этих сил обязательно пересекаются в одной точке и лежат в одной плоскости, то есть силы образуют плоскую систему совпадающих сил.
Теорема о трех силах облегчает решение задачи на равновесие твердого тела в том случае, когда направление одной из сил неизвестно. Найдя точку пересечения линий действий двух сил, направления которых известны, можно определить направление линии действия третьей силы, поскольку она должна проходить через точку приложения этой силы и точку пересечения линий действий первых двух сил.
Геометрический метод решения задач
Непосредственное использование сил многоугольника для решение задач статики сводится к геометрическому построению в масштабе векторного многоугольника с
дальнейшим определением неизвестных элементов с помощью тригонометрических формул. При решении задач на равновесие твердого тела геометрическим методом рекомендуется соблюдать следующий порядок:
1. Выделить объект равновесия;
2. Показать на чертежах точки примера и направления активных сил, действующих на объект равновесия;
3. Выяснить характер связей и возможные направления их реакций;
4. Построить замкнутый силовой многоугольник (построение надо начинать с силы, которая известна как по модулю, так и по направлению);
5. Из силового многоугольника найти неизвестные величины.
Аналитический метод решения задач
Аналитический метод решения задачи рекомендуется использовать в тех случаях, когда требуется определить скорости точек для большого числа положений плоской фигуры.
Проекция силы на ось и на плоскость
Общим способом определения модуля и направления равнодействующей является аналитический, который тоже следует из условия (C2.1) и базируется на аналитическом методе обозначения силы.
Аналитический метод обозначения силы заключается в том, что, выбрав некоторую прямоугольную систему координат  (рис.C2.1), силу
(рис.C2.1), силу  раскладывают по правилу параллелепипеда на три составляющие,
раскладывают по правилу параллелепипеда на три составляющие,

Алгебраические значения длин направленных отрезков  и
и  называются
называются
проекциями силы на оси  и
и  и обозначаются
и обозначаются  и
и 
Если и
и  — единичные векторы, которые направленны по осями
— единичные векторы, которые направленны по осями  и
и  соответственно, а
соответственно, а  и
и  — проекции силы на эти оси, то
— проекции силы на эти оси, то

Модуль и направление силы по известным проекциям на
три взаимно перпендикулярные оси  и
и  можно получить из формул:
можно получить из формул:


При определении проекции силы на ось возможны 4 случаи (рис.C2.2).

1. Вектор силы образует острый угол  с положительным направлением координатной оси (черта С2.2, а). В этом случае проекция силы на ось
с положительным направлением координатной оси (черта С2.2, а). В этом случае проекция силы на ось  положительная и по модулю равна:
положительная и по модулю равна:

2. Вектор силы образует с положительным направлением оси тупой угол (рис.С2.2, б). В этом случае проекция силы на ось отрицательная и по модулю равна:

3. Вектор силы образует прямой угол с осью 
 (рис.С2.2, в.). В этом случае проекция силы на ось равняется нулю:
(рис.С2.2, в.). В этом случае проекция силы на ось равняется нулю:

4. Сила параллельна к координатной оси. В этом случая сила проецируется на ось в натуральную величину со знаком плюс, когда ее направление совпадает с положительным направлением оси (рис.С2.2, г), и со знаком минус в противоположном случае (рис.С2.2, д):

В некоторых случаях для нахождения проекции силы на ось удобнее сначала найти ее проекцию на плоскость, в которой лежит эта ось, а уже затем спроектировать найденную проекцию на нужную ось.
Например, в случае, что изображен на рис. 2.3, сначала лучше спроектировать
силу  на плоскость
на плоскость  и получить проекцию
и получить проекцию  а уже затем найти проекции силы на оси
а уже затем найти проекции силы на оси  и
и  и
и  Тогда:
Тогда:


Аналитические условия равновесия системы совпадающих сил
Пусть силы  образуют систему совпадающих сил, тогда равнодействующая
образуют систему совпадающих сил, тогда равнодействующая  равна их геометрической сумме и тогда по теореме о проекции равнодействующей на оси системы координат:
равна их геометрической сумме и тогда по теореме о проекции равнодействующей на оси системы координат:

Если тело под действием заданной системы сил находится в равновесии, то  итак
итак  или с учетом (С2.7) получаем следующие условия равновесия тела под действием системы совпадающих сил:
или с учетом (С2.7) получаем следующие условия равновесия тела под действием системы совпадающих сил:

Таким образом, для равновесия пространственной системы совпадающих сил необходимо и достаточно, чтобы сумма проекций этих сил на каждую из трех
координатных осей равнялась нулю.
При решении задачи аналитическим способом до трех первых пунктов, приведенных в разделе С2.2, надо добавить следующие:
4. Выбрать декартовую систему координат 
5. Составить уравнение равновесия твердого тела в проекциях на оси координат;
6. Решить полученную систему уравнений равновесия и найти неизвестные величины.
Образец выполнения и решения задач на темы С2
Задача 1
Задано:

Определить: натяжение  нити ВС; реакцию
нити ВС; реакцию  стержня АВ.
стержня АВ.
Решение.
Центр шарнира точка В находится в равновесии под действием сил натяжения нитей
 , и реакции невесомого стержня
, и реакции невесомого стержня  Причем
Причем  по модулю равняется
по модулю равняется 
(п. С1.4, задача 1).

Таким образом, точка В находится в равновесии под действием трех сил, лежащих в одной плоскости и линии действия которых пересекаются в одной точке.
Величину и направление реакции  и величину натяжения нити
и величину натяжения нити  определим геометрически, воспользовавшись условием равновесия системы смежных сил в векторной форме:
определим геометрически, воспользовавшись условием равновесия системы смежных сил в векторной форме:

Для решения уравнения (1) построим силовой (векторный) треугольник (рис.2).

Для этого из произвольной точки Р (полюса) отложим вектор  величина которого
величина которого
нам известна. Поскольку векторный треугольник должен быть замкнутым, то с начала этого вектора проведем направление  а с конца — направление
а с конца — направление  до взаимного пересечения (точка С).
до взаимного пересечения (точка С).
Векторы  и
и  направим таким образом, чтобы векторный треугольник был замкнутым.
направим таким образом, чтобы векторный треугольник был замкнутым.
Определив углы треугольника, можно записать теорему синусов:

Отсюда получим:

Ответ: 
Задача 2
Задано:

Определить: натяжение нити  и реакции
и реакции  и
и  стержней AD и BD.
стержней AD и BD.
Решение. Шарнир D находится в равновесии под действием силы тяжести  натяжения нити
натяжения нити  реакций
реакций  и
и  невесомых стержней АD и BD (п.С1.4, задача 2).
невесомых стержней АD и BD (п.С1.4, задача 2).

Реакции  и
и  направим вдоль стержней от D, примем, что стержни растянуты.
направим вдоль стержней от D, примем, что стержни растянуты.
Все силы приложены к одной точке D и для определение неизвестных реакций можно воспользоваться аналитическими условиями равновесия системы совпадающих сил.
С точкой О свяжем пространственную систему координат, направив ось перпендикулярно плоскости АВС, а оси  и
и  расположим в этой плоскости.
расположим в этой плоскости.
Спроектировав все силы на оси выбранной системы координат, достанем:


Из уравнения (1) находим: 
Выразим из уравнения (2) натяжение нити и  подставим в уравнение (3):
подставим в уравнение (3):

Откуда:

Если при решении задачи какая-то из реакций приобретает отрицательное значение, то это означает, что направление этой реакции надо изменить на противоположное. Тогда, действительное направление реакций  и
и  невесомых стержней DA и DB противоположно изображенным на рисунке, а сами стержни будут не растянутыми, как указывалось в начале, а сжатыми.
невесомых стержней DA и DB противоположно изображенным на рисунке, а сами стержни будут не растянутыми, как указывалось в начале, а сжатыми.
Ответ: 
Система сходящихся сил на плоскости
Система сходящихся сил на плоскости — это такая система сил, действующих на абсолютно твёрдое тело, в которой линии действия всех сил пересекаются в одной точке. Такая система сил является на плоскости статически определимой, если число неизвестных сил в ней не больше двух.
Геометрическое условие равновесия системы сходящихся сил
Сходящимися называются силы, линии действия которых пересекаются в одной точке (рис.2.1, а).
Если перенести все силы вдоль линии их действия в эту точку, получим эквивалентную систему сил, приложенных к одной точке.
Равнодействующая  данной системы сил, которые проходят через точку
данной системы сил, которые проходят через точку  , приложена к этой же точке и изображается замыкающей стороной силового многоугольника, который построен (рис.2.1, б)
, приложена к этой же точке и изображается замыкающей стороной силового многоугольника, который построен (рис.2.1, б)

на прилагаемых силах, то есть равнодействующая равна векторной сумме прилагаемых сил:

Поскольку система сходящихся сил может быть заменена одной силой — равнодействующей, то необходимым и достаточным условием равновесия тела под действием системы сходящих сил является равенство нулю этой равнодействующей:

Геометрически это условие состоит в том, чтобы конец последнего вектора совпадал с началом первого в векторном (силовом) многоугольнике, построенном из сил системы, то есть силы должны образовывать замкнутый многоугольник.
Если тело находится в равновесии под действием трех сходящихся сил, то силовой многоугольник сводится к силовому треугольнику. Решения же задачи о равновесии в этом случае требует нахождения неизвестных элементов треугольника с помощью тригонометрических формул или измерений.
При решении задач на равновесие тела под действием трех сил часто приходится пользоваться теоремой о трех силах:
Если тело находится в равновесии под действием трех непараллельных сил, лежащих в одной плоскости, то линии действия этих сил обязательно пересекаются в одной точке, то есть силы образуют сходящуюся систему сил.
Теорема о трех непараллельных силах облегчает решение задач на равновесие твердого тела в тех случаях, когда направление одной из трех сил неизвестное. Определив точку пересечения линий действия двух сил, направление которых известно, можно указать направление линии действия третьей силы, поскольку она должна пройти через точку приложения этой силы и точку пересечения линий действия первых двух сил.
Геометрический метод решения задач
Непосредственное использование многоугольника сил при решение задач статики приводит к геометрическим построениям с последующим определением неизвестных элементов с помощью, например, формул тригонометрии.
При решении задач на равновесие твердого тела геометрическим методом рекомендуется придерживаться следующего порядка:
- Выделить объект, который будет рассматриваться в равновесии.
- Установить и показать на схеме активные силы, действующие на тело.
- Выяснить характер связей и установить направления их реакций.
- Построить замкнутый силовой многоугольник (построение надо начинать с сил, известных по модулю и по направлению).
- Из силового многоугольника определить неизвестные силы.
Аналитические условия равновесия системы сходящихся сил
Наиболее общим способом определения модуля и направления равнодействующей является аналитический, который базируется на аналитическом определении силы.
Если выбрать некоторую прямоугольную систему координатных осей  (рис.2.2.), то силу
(рис.2.2.), то силу  по правилу параллелограмма (в данном случае — прямоугольника) можно разложить на две составляющие
по правилу параллелограмма (в данном случае — прямоугольника) можно разложить на две составляющие  и
и  .
.

Алгебраические значения длин направленных отрезков  и
и  называются проекциями силы на оси
называются проекциями силы на оси  и
и  и обозначаются
и обозначаются  и
и  .
.
Если  и
и  единичные векторы, что направлены по осям и , а
единичные векторы, что направлены по осям и , а

Модуль и направление силы по известным проекциям на взаимно перпендикулярные оси  ,
,  находят из следующих формул:
находят из следующих формул:

При определении проекции силы на ось возможны следующие случаи (рис.2.3):

Рис. 2.3
1. Сила образует острый угол  с положительным направлением оси (рис.2.3, а). В этом случае проекция силы на ось имеет положительный знак и по модулю равна
с положительным направлением оси (рис.2.3, а). В этом случае проекция силы на ось имеет положительный знак и по модулю равна

2. Сила образует с положительным направлением оси тупой угол (рис.2.3, б). В этом случае ее проекция на координатную ось имеет отрицательный знак и равна

3. Сила образует прямой угол  с координатной осью (рис.2.3, в). В этом случае проекция силы на ось равна нулю:
с координатной осью (рис.2.3, в). В этом случае проекция силы на ось равна нулю:

4. Сила параллельна координатной оси (рис.2.3, г, д). В этом случае сила проецируется в натуральную величину и проекция положительна, если ее направление совпадает с положительным направлением оси (рис.2.3, г), и отрицательная, если направление силы совпадает с отрицательным направлением оси (рис.2.3, д).
Если силы  представляют собой систему сходящихся сил, то равнодействующая
представляют собой систему сходящихся сил, то равнодействующая  равна их геометрической сумме, а ее проекции на оси:
равна их геометрической сумме, а ее проекции на оси:

Поскольку модуль равнодействующей определяется по формуле

то тело под действием системы сходящихся сил будет находиться в равновесии, когда  , а это возможно, когда
, а это возможно, когда  и
и  . В результате получим следующие аналитические условия равновесия тела под действием системы сходящихся сил:
. В результате получим следующие аналитические условия равновесия тела под действием системы сходящихся сил:

Таким образом, для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы суммы проекций всех этих сил на каждую из координатных осей равнялись нулю.
При решении задач аналитическим способом нужно выполнить три первых пункта, указанные в параграфе 2.2, а затем следующие:
4. Выбрать декартову систему координат .
5. Составить уравнения равновесия твердого тела в проекциях на эти оси координат.
6. Решить систему составленных уравнений и определить неизвестные величины.
Примеры решения задач на тему: Система сходящихся сил
Задача № 1
Идеальный стержень  удерживается в равновесии нерастяжимой нитью
удерживается в равновесии нерастяжимой нитью  . К шарниру
. К шарниру  стержня на нити подвешено тело весом
стержня на нити подвешено тело весом  (рис.2.4).
(рис.2.4).

Определить натяжение нити и реакцию стержня , если 
Решение. Рассмотрим равновесие узла (рис.2.4). К узлу приложена сила  , которая перенесена вдоль линии действия от центра масс тела к точке , натяжение нити
, которая перенесена вдоль линии действия от центра масс тела к точке , натяжение нити  и реакция стержня
и реакция стержня  . Таким образом, узел находится в равновесии под действием трех сил , и , которые лежат в одной плоскости и имеют одну и ту же точку пересечения.
. Таким образом, узел находится в равновесии под действием трех сил , и , которые лежат в одной плоскости и имеют одну и ту же точку пересечения.
Величину и направление усилия и величину натяжения нити определим геометрическим методом, воспользовавшись геометрическим условием равновесия плоской системы сходящихся сил. Запишем геометрическое условие равновесия системы действующих сил на точку :

Согласно записанному векторному уравнению построим силовой треугольник.
Для этого с произвольной точки  (рис. 2.5) отложим в некотором масштабе вектор . С точки
(рис. 2.5) отложим в некотором масштабе вектор . С точки  начала вектора проведем прямую, параллельную линии действия реакции
начала вектора проведем прямую, параллельную линии действия реакции  , а с точки
, а с точки  конца вектора — прямую, параллельную линии действия реакции
конца вектора — прямую, параллельную линии действия реакции  . Проведенные прямые пересекутся в точке
. Проведенные прямые пересекутся в точке  , образовав треугольник
, образовав треугольник  . Укажем направление сил, руководствуясь тем, что при добавлении векторов начало каждого следующего вектора должно исходить из конца предыдущего.
. Укажем направление сил, руководствуясь тем, что при добавлении векторов начало каждого следующего вектора должно исходить из конца предыдущего.

Найти неизвестные величины можно или померив соответствующие стороны силового треугольника, или, по известным углам треугольника из теоремы синусов:

Откуда:

Ответ: 
Задача № 2
Нить с двумя телами на концах  и
и  перекинута через блоки
перекинута через блоки  и (рис.2.6). В точке к нити, находящейся между блоками, прикрепил груз
и (рис.2.6). В точке к нити, находящейся между блоками, прикрепил груз  При равновесии системы нить
При равновесии системы нить  образовала с горизонталью угол
образовала с горизонталью угол  , а нить
, а нить  .
.
Определить вес тел и . Силами трения в блоках пренебречь.
Решение. Сначала выясним, равновесие какого объекта надо рассмотреть при решении задачи. По условию задачи нужно определить вес тела и вес тела , которые приложены к центрам масс тел и направлены вертикально вниз. Каждое тело натягивает нить с силой, равной его весу. Блок меняет направление нити, а соответственно, и направление силы натяжения нити. Силы  и
и  по модулю, равны и , но направлены вдоль и
по модулю, равны и , но направлены вдоль и  .
.
Поскольку прямые и пересекаются в точке , к которой можно приложить и заданную силу , то при решении задачи надо рассматривать равновесие точки .
Таким образом, на объект равновесия, точку (рис.2.6), действуют силы натяжения ветки нити ; натяжения ветки нити ; весы тела . (Вес тел и учитывать не надо, поскольку они приложены не к объекту равновесия точки ).
Составим уравнение равновесия. Для этого, выберем систему координат с началом в точке , спроецируем силы на оси и составим уравнение равновесия.
Для проекций на ось достанем:

Знак проекции — плюс, поскольку она направлена по положительному направлению оси . Знак проекции — минус, поскольку она направлена по отрицательному направлению оси . Проекция силы на ось равна нулю.
Сумма проекций всех сил на ось равна:

Проекции сил и имеют знак плюс, поскольку направлены по положительному направлению оси . Проекция силы имеет знак минус, поскольку направлена по отрицательному направлению оси.
С учетом численных значений тригонометрических функций и величины , уравнения примут вид:

Найдя из первого уравнения:

и подставив во второе, получим:

Ответ: 
Задача № 3
Однородный стержень (рис.2.7), что прикреплено к вертикальной стенке с помощью шарнира , удерживается под углом  к вертикали с помощью троса , который образует угол
к вертикали с помощью троса , который образует угол  со стержнем.
со стержнем.

Определить величину и направление реакции  петли, если вес стержня
петли, если вес стержня 
Решение. Задачу решим геометрическим и аналитическим способами, используя теорему о равновесии тела под действием 3-х сил.
Рассмотрим равновесие стержня . На стержень действует активная сила — сила тяжести и реакции связей: натяжение троса ; реакция цилиндрического шарнира .
Направление натяжения троса  известное — реакция направлена вдоль троса к точке
известное — реакция направлена вдоль троса к точке  . Направление реакции шарнира предварительно указать нельзя. Для определения направления реакции воспользуемся теоремой о трех силах, так как стержень находится в равновесии под действием трех сил , и .
. Направление реакции шарнира предварительно указать нельзя. Для определения направления реакции воспользуемся теоремой о трех силах, так как стержень находится в равновесии под действием трех сил , и .
Найдем точку пересечения линий действия силы тяжести и натяжение троса — это точка  . Согласно теореме о трех силах, линия действия реакции тоже должна пройти через эту точку.
. Согласно теореме о трех силах, линия действия реакции тоже должна пройти через эту точку.
На рис.2.7  равнобедренный (углы при вершинах и равны
равнобедренный (углы при вершинах и равны  ). Поскольку линия действия (
). Поскольку линия действия ( ) силы тяжести проходит через середину стержня и представляет собой среднюю линию , то точка делит сторону пополам.
) силы тяжести проходит через середину стержня и представляет собой среднюю линию , то точка делит сторону пополам.
Соответственно, отрезок  является одновременно высотой, медианой и биссектрисой треугольника
является одновременно высотой, медианой и биссектрисой треугольника  .
.
Таким образом 
После определения направления реакции , можно переходить к вычислению величин реакций.
Запишем геометрическое условие равновесия системы сил, действующих на стержень :

Согласно записанному векторному уравнению построим замкнутый силовой треугольник (рис.2.8).

Для этого из произвольной точки  в некотором масштабе проводим вектор силы тяжести . Через точку
в некотором масштабе проводим вектор силы тяжести . Через точку  проводим прямую, параллельную линии действия реакции , а через точку
проводим прямую, параллельную линии действия реакции , а через точку  конца вектора проводим прямую, параллельную линии действия натяжения .
конца вектора проводим прямую, параллельную линии действия натяжения .
Проведенные прямые пересекаются в точке  , образовав силовой треугольник
, образовав силовой треугольник  . Поскольку
. Поскольку  (рис. 2.7) и
(рис. 2.7) и  . ( рис. 2.8) подобные, то
. ( рис. 2.8) подобные, то 
Из силового треугольника находим:

Решим задачу аналитическим способом. Для этого выберем прямоугольную систему координат  (рис.2.7) и составим уравнение равновесия в проекциях на оси:
(рис.2.7) и составим уравнение равновесия в проекциях на оси:

Из первого уравнения выразим  и подставим во второе уравнение:
и подставим во второе уравнение:

Отсюда получим:

Ответ: 
Балка (рис.2.9) закреплена шарнирно-неподвижной опорой в точке и шарнирно-подвижной в точке . К середине балки под углом  приложена сила
приложена сила 

Определить реакции опор и для двух случаев наклона подвижной опоры (рис.2.9, а и 2.9, б). Весом балки пренебречь.
Решение. Рассмотрим равновесие балки , изображенной на рис.2.9,а. На балку действует активная сила  и реакции опор и (рис. 2.10). Опора шарнирно-подвижная, ее реакция направлена перпендикулярно опорной поверхности. Поскольку, в данном случае опорная поверхность параллельна оси балки, то реакция
и реакции опор и (рис. 2.10). Опора шарнирно-подвижная, ее реакция направлена перпендикулярно опорной поверхности. Поскольку, в данном случае опорная поверхность параллельна оси балки, то реакция  перпендикулярна . Опора шарнирно-неподвижная и направление ее реакции предварительно указать нельзя.
перпендикулярна . Опора шарнирно-неподвижная и направление ее реакции предварительно указать нельзя.

Для определения направления реакции (угла  ) воспользуемся теоремой о трех силах. Линии действия силы и реакции пересекаются в точке . Таким образом, линия действия тоже должна пройти через точку .
) воспользуемся теоремой о трех силах. Линии действия силы и реакции пересекаются в точке . Таким образом, линия действия тоже должна пройти через точку .
С рис.2.10 видно, что  — равнобедренный и прямоугольный, то есть
— равнобедренный и прямоугольный, то есть  . Откуда:
. Откуда:

Теперь перейдем к определению величин реакций опор.
Составим уравнение равновесия сил в проекциях на оси выбранной системы координат :

С учетом числовых значений:

В результате получим:

Ответ: 
Перейдем к определению реакций опор балки , что изображена на рис.2.9,б.
В этом случае, реакция составляет с осью балки угол  . Линия действия реакции (рис.2.11) проходит через точку , в которой пересекаются линии действия силы и реакции .
. Линия действия реакции (рис.2.11) проходит через точку , в которой пересекаются линии действия силы и реакции .

Определим угол между реакцией и осью балки :

Составим уравнение равновесия для системы сил, действующей на балку:

С учетом числовых данных:

Добавив уравнение получим:

Подставив значение  в первое уравнение, найдем
в первое уравнение, найдем  :
:

Ответ: 
Услуги по теоретической механике:
- Заказать теоретическую механику
- Помощь по теоретической механике
- Заказать контрольную работу по теоретической механике
Учебные лекции:
- Статика
- Момент силы
- Пара сил
- Произвольная система сил
- Плоская произвольная система сил
- Трение
- Расчет ферм
- Расчет усилий в стержнях фермы
- Пространственная система сил
- Произвольная пространственная система сил
- Плоская система сходящихся сил
- Пространственная система сходящихся сил
- Равновесие тела под действием пространственной системы сил
- Естественный способ задания движения точки
- Центр параллельных сил
- Параллельные силы
- Система произвольно расположенных сил
- Сосредоточенные силы и распределенные нагрузки
- Кинематика
- Кинематика твердого тела
- Движения твердого тела
- Динамика материальной точки
- Динамика механической системы
- Динамика плоского движения твердого тела
- Динамика относительного движения материальной точки
- Динамика твердого тела
- Кинематика простейших движений твердого тела
- Общее уравнение динамики
- Работа и мощность силы
- Обратная задача динамики
- Поступательное и вращательное движение твердого тела
- Плоскопараллельное (плоское) движение твёрдого тела
- Сферическое движение твёрдого тела
- Движение свободного твердого тела
- Сложное движение твердого тела
- Сложное движение точки
- Плоское движение тела
- Статика твердого тела
- Равновесие составной конструкции
- Равновесие с учетом сил трения
- Центр масс
- Колебания материальной точки
- Относительное движение материальной точки
- Статические инварианты
- Дифференциальные уравнения движения точки под действием центральной силы и их анализ
- Динамика системы материальных точек
- Общие теоремы динамики
- Теорема об изменении кинетической энергии
- Теорема о конечном перемещении плоской фигуры
- Потенциальное силовое поле
- Метод кинетостатики
- Вращения твердого тела вокруг неподвижной точки
Модуль равнодействующей силы
Четверг, 24 декабря, 2015
В данной статье рассказано о том, как найти модуль равнодействующей сил, действующих на тело. Репетитор по математике и физике объяснит вам, как найти суммарный вектор равнодействующей сил по правилу параллелограмма, треугольника и многоугольника. Материал разобран на примере решения задачи из ЕГЭ по физике.
Как найти модуль равнодействующей силы
Сила, которая оказывает на материальную точку такое же действие, как и несколько других сил, называется равнодействующей этих сил. Для нахождения вектора равнодействующей силы необходимо геометрически (векторно) сложить все силы, которые действуют на материальную точку.
Напомним, что сложить векторы геометрически можно с помощью одного из трех правил: правила параллелограмма, правила треугольника или правила многоугольника. Разберём каждое из этих правил в отдельности.
1. Правило параллелограмма. На рисунке по правилу параллелограмма складываются векторы  и
и  . Суммарный вектор есть вектор
. Суммарный вектор есть вектор  :
:

Если векторы и не отложены от одной точки, нужно заменить один из векторов равным и отложить его от начала второго вектора, после чего воспользоваться правилом параллелограмма. Например, на рисунке вектор заменен на равный ему вектор  , и
, и  :
:

2. Правило треугольника. На рисунке по правилу треугольника складываются векторы и . В сумме получается вектор  :
:

Если вектор отложен не от конца вектора , нужно заменить его равным и отложенным от конца вектора , после чего воспользоваться правилом треугольника. Например, на рисунке вектор заменен равным ему вектором  , и
, и  :
:

3. Правило многоугольника. Для того, чтобы сложить несколько векторов по правилу параллелограмма, необходимо от произвольной точки  отложить вектор, равный первому складываемому вектору, от его конца отложить вектор, равный второму складываемому вектору, и так далее. Суммарным будет вектор, проведенный из точки в конец последнего отложенного вектора. На рисунке
отложить вектор, равный первому складываемому вектору, от его конца отложить вектор, равный второму складываемому вектору, и так далее. Суммарным будет вектор, проведенный из точки в конец последнего отложенного вектора. На рисунке  :
:

Задача на нахождение модуля равнодействующей силы
Разберем задачу на нахождение равнодействующей сил на конкретном примере из демонстрационного варианта ЕГЭ по физике 2016 года.

Для нахождения вектора равнодействующей сил найдём геометрическую (векторную) сумму всех изображенных сил, используя правило многоугольника. Упрощенно говоря (не вполне корректно с математической точки зрения), каждый последующий вектор нужно отложить от конца предыдущего. Тогда суммарный вектор будет исходить из точки, из который отложен первоначальный вектор, и приходить в точку, где заканчивается последний вектор:

Требуется найти модуль равнодействующей сил, то есть длину получившегося вектора. Для этого рассмотрим вспомогательный прямоугольный треугольник  :
:

Требуется найти гипотенузу  этого треугольника. «По клеточкам» находим длину катетов:
этого треугольника. «По клеточкам» находим длину катетов:  Н,
Н,  Н. Тогда по теореме Пифагора для этого треугольника получаем:
Н. Тогда по теореме Пифагора для этого треугольника получаем:  Н. То есть искомый модуль равнодействующей сил равен
Н. То есть искомый модуль равнодействующей сил равен  Н.
Н.
Итак, сегодня мы разобрали, как находить модуль равнодействующей силы. Задачи на нахождение модуля равнодействующей силы встречаются в вариантах ЕГЭ по физике. Для решения этих задач необходимо знать определение равнодействующей сил, а также уметь складывать векторы по правилу параллелограмма, треугольника или многоугольника. Стоит немного потренироваться, и вы научитесь решать эти задачи легко и быстро. Удачи вам в подготовке к ЕГЭ по физике!
Репетитор по физике на Юго-Западной
Сергей Валерьевич