Теоретическая механика (стр. 1 )
 |
Из за большого объема этот материал размещен на нескольких страницах: 1 2 3 4 5 6 |

Министерство образования Российской Федерации
Владивостокский государственный университет
экономики и сервиса
Г. Л. ОВСЯННИКОВА
Рецензент , канд. техн. наук, профессор каф. ФХ и ПМ ВГУЭС
Ч 81 ТЕОРЕТИЧЕСКАЯ МЕХАНИКА: Учебное пособие. Ч. 1. – Владивосток: Изд-во ВГУЭС, 2003 – 128с.
Учебное пособие представляет собой комплекс, содержащий основные сведения о теории, необходимые для самостоятельного решения задач. В каждом разделе даны рекомендации о последовательности решения различных типов задач и приведены подробные методические указания к решению подобных задач. Может использоваться как теоретическая часть при подготовке к сдаче экзамена или зачета, так и в качестве методических указаний к решению задач на практических занятиях, при выполнении контрольных работ заочниками и расчётно-графических заданий.
Для студентов всех форм обучения.
ã Издательство Владивостокского
экономики и сервиса, 2003
Глава 1. ПЛОСКАЯ СИСТЕМА СХОДЯЩИХСЯ СИЛ
§ 1. Сложение двух сходящихся сил
Если в одной точке к телу приложены две силы под углом друг к другу, то их сложение выполняется по правилу параллелограмма.
Модуль равнодействующей R может быть определен аналитически из треугольника АВС с помощью теоремы косинусов (рис. 1):

так как  .
.
Направление равнодействующей определяется углами  и
и  , которые можно рассчитать, применив теорему синусов. Для треугольника ABC
, которые можно рассчитать, применив теорему синусов. Для треугольника ABC
 , (1)
, (1)
откуда, учитывая, что  , получим
, получим
 ,
,  . (2)
. (2)
Вместо параллелограмма сил можно строить силовой треугольник (рис. 2). Выбрав любую точку на плоскости рисунка, проводят из нее, сохраняя масштаб, вектор, равный и параллельный одной из заданных сил, например F1.


Из конца вектора F1 проводят вектор, равный и параллельный второй силе, F2. Начало первого вектора соединяют с концом второго, замыкая треугольник. Замыкающая сторона треугольника в данном масштабе представляет собой искомую равнодействующую. Модуль и направление равнодействующей определяют аналитически, как было показано выше.
При построении треугольника сил необходимо придерживаться правила: стрелки составляющих векторов направлены в одну сторону, а равнодействующей – им навстречу.
Частные случаи: 1) если  , т. е. силы действуют по одной прямой в одну строну, то
, т. е. силы действуют по одной прямой в одну строну, то
 ;
;
2) если , т. е. силы действуют по одной прямой в разные стороны, то
;
3) если  , то
, то 
Заметим, что определение равнодействующей двух сил по правилу параллелограмма или треугольника называется векторным, или геометрическим, сложением.
Задача 1. Определить равнодействующую двух сил  и , модули которых соответственно равны Р1 = 40 Н и Р2 = 80 Н; сила направлена горизонтально вправо, а образует с угол a = 120° (рис. 3, а).
и , модули которых соответственно равны Р1 = 40 Н и Р2 = 80 Н; сила направлена горизонтально вправо, а образует с угол a = 120° (рис. 3, а).

Задачу можно решить графоаналитическим методом, используя либо правило параллелограмма, либо правило треугольника.
Решение 1 – по правилу параллелограмма:
1. Используя условие задачи и приблизительно соблюдая масштаб, изображаем параллелограмм ABCD (рис. 3, б). Порядок построения такой: из точки А проводим отрезок , затем из той же точки А под углом 120° к отрезку АВ проводим отрезок , из точек В и С проводим прямые BD || АС и CD || AB и, наконец, проводим диагональ
2. Используя формулу (1), можем найти модуль равнодействующей:


Имея в виду, что cos120° = – sin 30° = – 0,5, получаем
 Н.
Н.
3. Применяя к D ABD (или к D ACD) (см. рис. 3, б) теорему синусов, получаем
 ,
,
 и
и  ,
,
 ;
; 
Таким образом, вектор равнодействующей  перпендикулярен к силе ,
перпендикулярен к силе ,
Угол j2 можно найти либо как разность

либо из теоремы синусов:
 и j2 = 30°.
и j2 = 30°.
Один и тот же результат, полученный различными путями, подтверждает правильность решения задачи.
Ответ. Равнодействующая данных сил равна 69,3 Н и линия ее действия образует с направлением силы прямой угол.
Решение 2 – по правилу треугольника.
1. Используя условие задачи, строим треугольник сил ABC (рис. 3, в). Порядок построения такой: из точки А проведем отрезок  . Затем из точки В под углом a = 120° к направлению проводим отрезок
. Затем из точки В под углом a = 120° к направлению проводим отрезок  и, наконец, «замкнем» треугольник отрезком АС, который изобразит искомую равнодействующую
и, наконец, «замкнем» треугольник отрезком АС, который изобразит искомую равнодействующую 
В получившемся треугольнике

2. Применяем к треугольнику ABC известную из тригонометрии теорему косинусов:

откуда модуль равнодействующей
 Н.
Н.
3. Углы j1 и j2, определяющие направление равнодействующей относительно заданных сил, находим, как и в первом решении, по теореме синусов.
§ 2. Разложение силы на две сходящиеся составляющие
Любую силу можно рассмотреть как равнодействующую двух произвольных, сходящихся под углом сил. Модуль и направление составляющих сил зависят от угла между ними. Можно построить множество параллелограммов, для которых данная сила R будет служить диагональю (рис. 4). Чтобы задача стала определенной, нужно знать одно из дополнительных условий: модули обеих составляющих, модуль и направление одной из составляющих, направление обеих составляющих, модуль одной из составляющих и направление другой.

Каждую из задач можно решить двумя способами: графическим и графоаналитическим.
При графическом решении задачи заданную силу откладывают на чертеже в выбранном масштабе, а затем производят несложные геометрические построения в зависимости от заданных условий.
Для графоаналитического решения нет надобности соблюдать масштаб, но при построении нужно сохранять примерное направление сил. Модули составляющих сил либо углы, определяющие их направление, вычисляют, пользуясь формулами (1) и (2).
Например, если заданы только направления составляющих сил, то из точки А вектора R (рис. 5) проводим линии действия составляющих AM и AN под известными углами и  Затем из точки В проводим прямые, параллельные этим линиям, т. е. строим параллелограмм, в котором стороны АС и AD представляют собой искомые силы F1 и F2 в данном масштабе.
Затем из точки В проводим прямые, параллельные этим линиям, т. е. строим параллелограмм, в котором стороны АС и AD представляют собой искомые силы F1 и F2 в данном масштабе.
При графоаналитическом решении модули сил F1 и F2 определяют по формулам, полученным из выражения (1):
 ;
;  .
.
Задача 2. Определить силы, растягивающие нити АВ и ВС, которые удерживают груз весом G = 20 Н в равновесии (рис. 6, а).
Решение. Графическое (рис. 6, б): из точки О на плоскости рисунка строим в выбранном масштабе вектор силы G. Из точки О проводим прямые, параллельные нитям ОМ и ON. Затем из конца вектора G проводим прямые KL и КЕ, чтобы получился параллелограмм, у которого стороны OL и ОЕ соответствуют в данном масштабе искомым силам.

Графоаналитическое (рис. 6, б): Так как известны все углы в треугольнике ОЕК, а также модуль силы G, можно использовать теорему синусов для определения модулей сил F1 и F2:
 ,
,
где 

 откуда
откуда

Задача 3. Фонарь весом 80 Н подвешен на кронштейне ABC, укрепленном на вертикальной стене (рис. 7). Определить усилия, возникшие в горизонтальном стержне СВ и наклонной тяге АВ после подвески фонаря, если СВ = 1 м и АВ = 1,2 м. Соединения в точках А, В и С кронштейна – шарнирные.
Решим задачу графоаналитическим методом по правилу параллелограмма.
1. Используя рис. 7, на котором изображен кронштейн, строим параллелограмм сил. Через произвольную точку а (рис. 29) проводим прямые A1A2 и С1С2, параллельные соответственно тяге АВ и стержню СВ (рис. 7).

Из той же точки а откладываем вертикально вниз отрезок ab, который изображает силу  Из точки b проводим прямые bd || С1С2 и bc || A1A2. В получившемся параллелограмме adbc стороны ad и ас изображают соответственно искомые усилия и
Из точки b проводим прямые bd || С1С2 и bc || A1A2. В получившемся параллелограмме adbc стороны ad и ас изображают соответственно искомые усилия и  .
.
2. Теперь имеются две геометрические фигуры – треугольник ABC (см. рис. 7), изображающий заданный кронштейн, и силовой параллелограмм (рис. 8).

Геометрически D ABC (рис. 7) и D adb, или, что все равно, D abc
(рис. 8), подобны между собой.
Используя свойство подобных треугольников (замечаем, что db = ac = Nc), получаем
 .
.
3. Решая получившиеся пропорции, находим
 и
и  .
.
Неизвестную в кронштейне длину АС найдем по теореме Пифагора (из условия задачи ясно, что угол АСВ – прямой)
 м.
м.
Подставляя в выражения для NА и Nc исходные данные, получаем
 H;
H;  H.
H.
Задача 4. При помощи двух нерастяжимых нитей АС и ВС удерживается груз, вес которого 12 Н. Положение нитей и груза показано на рис. 9. Определить натяжения нитей.
Решим задачу графоаналитическим методом по правилу треугольника с использованием тригонометрических соотношений.
1. Прежде всего необходимо силу G = =12 Н разложить на две составляющие, линии действия которых совпадают с направлениями линий АС и ВС.


2. Изобразим силу  отрезком (рис. 10). Затем проведем из точки С прямую CN, продолжив АС, а из точки L – прямую LM параллельно положению нити ВС. Получим силовой треугольник CKL, в котором стороны СK и KL изображают искомые силы натяжения нитей АС и ВС.
отрезком (рис. 10). Затем проведем из точки С прямую CN, продолжив АС, а из точки L – прямую LM параллельно положению нити ВС. Получим силовой треугольник CKL, в котором стороны СK и KL изображают искомые силы натяжения нитей АС и ВС.
3. Если в треугольнике CKL известны углы a, b и g, то задачу легко решить по теореме синусов:
 .
.
4. Из построения силового треугольника следует, что

(для наглядности положение нитей относительно вектора G показано на рис. 10 штриховой линией). А так как треугольники D АСЕ и D BCD – прямоугольные, то из D ACE


Угол g легко найдем как дополнение к Ð 180°:
 .
.
5. И теперь, зная углы a, b и g, из уравнения (1)
 Н
Н
 Н.
Н.
Таким образом, нить CA растягивается усилием, равным 6,25 Н, а нить СВ – усилием 10,75 Н.
§ 3. Сложение плоской системы сходящихся сил.
Силовой многоугольник
Равнодействующую плоскость системы сходящихся сил можно найти графически с помощью построения силового многоугольника.
Пусть дана система сил F1, F2, F3, F4 (рис. 11, a). Выберем на плоскости чертежа произвольную точку O (рис. 11, б). Из нее проводим в выбранном масштабе вектор, равный по модулю и параллельный силе f1. Из конца этого вектора проводим вектор, равный силе F2. Из конца вектора силы F2 строим вектор, равный и параллельный силе F3, и т. д. Соединив точку О с концом последнего вектора, получим замыкающую сторону многоугольника ON, которая в данном масштабе представляет собой искомую равнодействующую системы – R. Действительно, диагональ силового многоугольника OL равна вектору R1, который является геометрической суммой векторов F1 и F2: R1= F1+ F2 . Вторая диагональ ОМ равна R2= R1+ F3= F1+ F2+ F3. Очевидно, что замыкающая сторона R = R2 + R4 = F1 + F2 + F3 + F4 есть равнодействующая системы, равная геометрической сумме всех заданных сил. Точка приложения равнодействующей совпадает с точкой А.

Модуль и направление равнодействующей не изменятся, если изменить порядок, в котором откладываются векторы сил при построении силового многоугольника.
Следствие. Если система сил является уравновешенной, то равнодействующая системы равна нулю (R = 0). В этом случае силовой многоугольник замкнут, т. е. конец последнего вектора должен совпадать с началом первого.
Замкнутость силового многоугольника является геометрическим условием равновесия плоской системы сходящихся сил. Это условие используют при решении задач на равновесие.
Задача 5. Шар весом G = 20 Н (рис. 12, а) подвешен к вертикальной стене при помощи нити СВ. Определить натяжение нити и силу давления шара на стену, если угол между стеной и нитью a = 30°.
1. Рассмотрим равновесие шара под действием трех сил: силы тяжести G, реакции нити RC и реакции стены RA. Линии действия всех сил пересекаются в центре шара 0.

2. Строим замкнутый силовой треугольник, начиная с известного вектора G (рис. 12, б). Модули неизвестных сил RA и RC, равные соответственно давлению шара на стену и натяжению нити, определим из полученного треугольника:
 ,
,

 .
.
Задача 6. Определить равнодействующую четырех сил: P1=18 Н, Р2 = 10 Н, Р3 = 6 Н и Р4 = 8 Н, приложенных к одной точке А и направленных, как показано на рис. 13.
Решение – методом проекций на координатные оси.
1. Изображаем на рисунке четыре данные силы и выбираем расположение осей проекций. В данном случае удобно начало осей поместить в точке А, а оси совместить с силами и  (рис. 13, а).
(рис. 13, а).

2. Находим проекции данных сил на ось х (рис. 13,б):


3. Находим проекции данных сил на ось у (рис. 13,в):


4. Находим проекции искомой равнодействующей на оси х и у:


Проекция на ось х получается отрицательной, а на ось у положительной. Значит вектор  заменяющий действие четырех данных сил и приложенный к точке А, должен быть направлен относительно оси у вверх, а относительно оси х – влево. Положение равнодействующей R показано отдельно на рис. 13, г.
заменяющий действие четырех данных сил и приложенный к точке А, должен быть направлен относительно оси у вверх, а относительно оси х – влево. Положение равнодействующей R показано отдельно на рис. 13, г.
5. Находим модуль равнодействующей:
 Н.
Н.
6. Находим угол j, определяющий направление R относительно оси у (см. рис. 13, а):

и, следовательно,  .
.
Для определения угла j использован D ABC (см. рис. 13, г), в котором  Поэтому XR не имеет значения и в выражение tgj подставлена его абсолютная величина.
Поэтому XR не имеет значения и в выражение tgj подставлена его абсолютная величина.
Угол j можно найти при помощи синуса:

Таким образом, равнодействующая четырех заданных сил равна 26,7 Н, направлена под углом 40°30′ к положительному направлению оси у и под углом 90° + 40°30′ = 130°30′ к положительному направлению оси х.
Задача 7. К концу В веревки АВ прикреплено кольцо, на которое действуют четыре силы: Р1 = 40 H, Р2 = 25 H, P3 = 25 H и P4 = 20 H, направленные, как показано на рис. 14, а (сила Р2 горизонтальна). Определить усилие, возникшее в веревке, и ее направление относительно горизонтали.
Решение – методом проекций.
1. Веревка будет натянута равнодействующей четырех заданных сил. Следовательно, определив модуль равнодействующей, получим усилие, возникшее в веревке, а определив направление равнодействующей, найдем положение натянутой веревки.
2. Изобразим точку В с действующими на нее силами на отдельном рисунке (рис. 14, б) и совместим оси проекций с силами  и
и  .
.
3. Найдем проекции заданных сил на ось х:



4. Найдем проекции заданных сил на ось у:


5. Найдем проекции равнодействующей на оси х и у:


6. Найдем модуль равнодействующей:
 H.
H.
Как видно, в данном случае проекция равнодействующей на ось у очень мала по сравнению с проекцией на ось х. Поэтому равнодействующая практически численно равна проекции на ось х. Следовательно, можно принять, что вектор равнодействующей направлен вдоль оси х вправо (проекция на ось х положительна), т. е. горизонтально.
Таким образом, четыре заданные силы натягивают веревку равнодействующей силой R, приложенной к точке В (к кольцу на конце веревки) и направленной горизонтально.
Другой конец веревки (точка А, рис. 14, а) закреплен, поэтому на кольцо В со стороны веревки действует еще одна сила, численно равная равнодействующей, но направленная в противоположную сторону. Эта сила называется уравновешивающей системы четырех сил.
На рис. 14, в показаны равнодействующая R и уравновешивающая  .
.
Задача 8. На конце В горизонтального стержня АВ необходимо прикрепить две нити с грузами Р1 = 4 кH и Р2 = 0,8 кH, как показано на рис. 15, а. Под каким углом к этому стержню следует присоединить второй стержень ВС, чтобы стержень АВ растягивался силой РА = 2 кН. Какое усилие при этом будет испытывать стержень ВС?
Соединения стержней между собой и с опорами шарнирные.
Решение – методом проекций.
1. На точку В действуют три силы: – вертикально вниз,  – вдоль нити от точки В к блоку (под углом 30° к горизонтали) и противодействие (реакция) стержня тому растягивающему действию, которое испытывает стержень. Изобразим эти три силы на рис. 15, б и найдем их равнодействующую, вдоль направления которой необходимо установить стержень ВС.
– вдоль нити от точки В к блоку (под углом 30° к горизонтали) и противодействие (реакция) стержня тому растягивающему действию, которое испытывает стержень. Изобразим эти три силы на рис. 15, б и найдем их равнодействующую, вдоль направления которой необходимо установить стержень ВС.
2. Оси проекций совместим с силами и  и определим проекции искомой равнодействующей сначала на ось х, а потом на ось у, зная, что каждая из них равна алгебраической сумме проекций данных сил на соответствующую ось:
и определим проекции искомой равнодействующей сначала на ось х, а потом на ось у, зная, что каждая из них равна алгебраической сумме проекций данных сил на соответствующую ось:




3. Обе проекции получаются отрицательными. Значит, равнодействующая расположится так, как показано штриховым на рис. 15, б, и положение стержня ВС определится углом  .
.

4. Определим значение угла a из треугольника, образуемого и его проекциями (рис. 15, в):
 ,
, 
5. Стержень ВС необходимо установить под  к стержню АВ, и тогда он будет сжиматься силой, равной
к стержню АВ, и тогда он будет сжиматься силой, равной
 кН.
кН.
Описанное положение стержня показано на рис. 15, г.
Если же установить стержень, как показано на рисунке штриховой линией ВС, то стержень будет испытывать растяжение, равное той же силе R = 3,83 кН.
Задача 9. Определить равнодействующую пяти сил:
Р1 = 52 Н, Р2 = 70 Н, Р3 = 69 Н, Р4 = 77 Н, Р5 = 70 Н, действующих на точку А, как показано на рис. 16, а.

Решение – методом проекций.
1. Так как силы и направлены друг к другу под прямым углом, то и совместим с этими силами ось проекций. Тогда векторы , и будут образовывать с осями проекций углы, показанные на рис. 16, б.
2. Найдем проекцию равнодействующей на ось х:


3. Найдем проекцию равнодействующей на ось у:


4. Обе проекции искомой равнодействующей равны нулю, значит и сама равнодействующая также равна нулю.
Таким образом, данная система сил уравновешена. Иными словами, любую из пяти заданных сил можно рассматривать как уравновешивающую четыре остальных.
§ 4. Проекция силы на ось.
Проекция силы на две взаимно-перпендикулярные оси координат
Кроме рассмотренных выше графического и графоаналитического методов решения задач, в статике широко распространен аналитический метод их решения, или метод проекций.
Проекцией силы на ось (рис. 17) является отрезок оси, заключенный между проекциями на эту ось начала и конца вектора силы. Проекцию обычно обозначают той же буквой, что и силу, но с индексом. Например, Fx – проекция силы F на ось х.

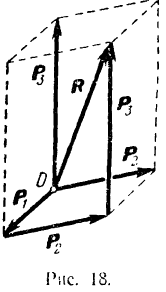
Проекция силы на ось есть величина скалярная. Она может быть положительной, отрицательной или равной нулю в зависимости от величины угла a между направлением силы и положительным направлением оси. Из прямоугольного треугольника ABC следует, что Fx = F сos a, т. е. проекция силы на ось равна произведению модуля силы на косинус угла между направлением силы и положительным направлением оси.
Если угол a острый, то проекция положительна (рис. 17), если угол a – тупой, то проекция отрицательна (рис. 18, а):


Нетрудно убедиться, что проекция силы на ось будет равна нулю, если a = 90° или 270° (рис. 18, б), и равна модулю силы, если a = 0 или a = 180° (рис. 18, в).
Модуль и направление силы можно определить по ее проекциям на две взаимно перпендикулярные оси (рис. 18, в):

Из треугольника ABC, поскольку АС = Fx и ВС = Fy, следует, что модуль силы F равен
 (3)
(3)
Направление силы определяют косинусы углов (рис. 19):
 ;
;  . (4)
. (4)

Задача 10. В точке В кронштейна ABC (рис. 20, а) подвешен груз М весом 8 кН. Определить реакции стержней кронштейна, если углы кронштейна a = 110°, b = 30° и крепления в точках А, В и С шарнирные.

Решение – методом проекций при помощи уравнений равновесия.
1. Так как три силы , и , действующие на точку В (рис. 21), образуют уравновешенную систему, то алгебраические суммы проекций этих сил на каждую из двух осей координат равны нулю.

2. Выберем оси координат так, чтобы одна из осей совпадала с линией действия одной из неизвестных сил (рис. 21), и составим два уравнения равновесия:
 (1)
(1)
 (2)
(2)
 кН.
кН.

Задача 11. К шарниру В кронштейна ABC прикреплена веревка, перекинутая через блок, к другому концу которой прикреплен груз весом G = l,5 кН (рис. 22). Определить усилия в стержнях АВ и СВ кронштейна, если крепления в точках А и С шарнирные, a = 35° и b = 100°.

Решим задачу методом проекций.
1. Изобразив шарнир В вместе с действующими на него силами  и и расположив оси проекций, как показано на рис. 19, составим уравнения равновесия:
и и расположив оси проекций, как показано на рис. 19, составим уравнения равновесия:
 (1)
(1)
 (2)
(2)
2. Из уравнения (2)
 кН,
кН,
а из уравнения (1)

Итак, реакции стержней (их действия на шарнирный болт В) равны NA = 2,57 кН и NС = l,85 кН. Точно с такими же усилиями действует шарнирный болт на стержни. Стержень АВ растянут силой 2,57 кН, а стержень СВ сжат силой 1,85 кН.
Техническая механика
Плоская система сходящихся сил
Геометрический способ определения равнодействующей плоской системы сходящихся сил
Система сил, линии действия которых лежат в одной плоскости и все пересекаются в одной точке, называется плоской системой сходящихся сил.
Теорема
Плоская система сходящихся сил в общем случае эквивалентна равнодействующей, которая равна векторной сумме этих сил; линия действия равнодействующей проходит через точку пересечения линий действия составляющих.
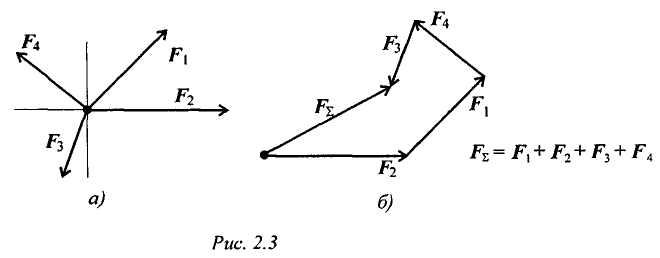
Пусть дана плоская система трех сил F1 , F2 и F3 , линии действия которых сходятся в точке А (см. рисунок а) .
На основании следствия из аксиом III и IV перенесем эти силы вдоль линий их действия в точку А . Сложив первые две силы F1 и F2 по правилу параллелограмма, получим их равнодействующую R (см. рисунок а) :
R = F1 + F2 .
Пользуясь той же аксиомой параллелограмма, сложим равнодействующую R с силой F3 :
где FΣ – равнодействующая данной системы трех сил.
Аналогичные рассуждения можно провести для любого количества сходящихся сил, в результате чего получим:
FΣ = F1 + F2 + F3 +…+ Fn .
Сокращенно это равенство можно записать так:
FΣ = ΣFi , где i – все целые числа от единицы до n .
Очевидно, что построения, выполненные на рисунке a , можно заменить более простым, как показано на рисунке b . Многоугольник АВСD называют силовым многоугольником. Сторона AD , соединяющая начало первого с концом последнего вектора, называется замыкающей стороной.
Необходимо помнить, что стрелки векторов слагаемых сил образуют определенное направление обхода по контуру силового многоугольника, а замыкающая сторона, определяющая модуль и направление равнодействующей, имеет стрелку, направленную против обхода (см. рисунок b) .
Если определить равнодействующую из силового многоугольника с помощью геометрии и тригонометрии, то такой способ будет называться геометрическим.
Если сделать чертеж силового многоугольника в определенном масштабе, то равнодействующая определится простым измерением замыкающей стороны с последующим умножением на масштаб. Такой способ нахождения равнодействующей называется графическим.
Порядок сложения векторов при построении силового многоугольника на величину равнодействующей не влияет, так как векторная сумма от перемены мест слагаемых не меняется.
Геометрическое условие равновесия плоской системы сходящихся сил
При построении силового многоугольника возможен случай, когда конец последнего вектора совпадает с началом первого. В этом случае замыкающей стороны не будет, и такой силовой многоугольник называется замкнутым.
Очевидно, что равнодействующая FΣ системы сходящихся сил, образующих замкнутый силовой многоугольник, равна нулю, т. е. система сил находится в равновесии. Отсюда вытекает условие, при котором плоская система сходящихся сил будет находиться в равновесии. Это условие выражается равенством:
и формулируется так: для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы силовой многоугольник был замкнут.
Условия равновесия, записанные в виде равенств, содержащих неизвестные величины, называются уравнениями равновесия.
Применяя геометрическое условие равновесия, удобно решать задачи, в которых на тело действуют три силы, так как в этом случае замкнутый силовой многоугольник представляет собой треугольник.
Решение большинства задач статики проводят в три этапа:
— выбирают тело, равновесие которого будет рассматриваться;
— отбрасывают связи, заменяя их реакциями, и устанавливают, какая система сил действует на тело;
— пользуясь условиями равновесия, находят неизвестные величины.
При решении задач статики следует строго соблюдать правило: размерности и единицы величин всех слагаемых и обеих частей равенства должны быть одинаковыми.
В сомнительных случаях целесообразно использовать это правило для проверки правильности хода решения задач, для чего следует подставить в слагаемые проверяемого равенства единицы всех входящих в них величин и, произведя возможные сокращения, сравнить полученные единицы правой и левой частей.
Пример решения задачи
В качестве примера решения задачи с использованием изложенных выше методов, определим натяжение веревки F и силу давления шара P на стену, если сила тяжести шара равна G .
Рассмотрим условие равновесия шара. Применив принцип освобождаемости, отбросим связи и заменим их реакциями. Реакция N гладкой стены перпендикулярна стене и проходит через центр шара (так как шар однородный, его геометрический центр совпадает с центром тяжести).
Реакция F веревки направлена вдоль линии натяжения веревки и тоже проходит через центр шара (согласно теореме о равновесии трех непараллельных сил). Применим к системе сил уравнение равновесия:
ΣFi = 0 , или G + N + R = 0.
Строим замкнутый силовой треугольник, начиная с изображения в произвольном масштабе вектора известной силы G (см. рисунок) . Направление обхода треугольника (т. е. направление стрелок) определяется направлением этой силы. Из построенного силового треугольника получим соотношения:
N = G tg α ; R = G/cos α
Искомая сила давления P шара на стену, согласно аксиоме взаимодействия, по модулю равна реакции N стены, но направлена в противоположную сторону.
Натяжение веревки F равно по модулю ее реакции R .
Эту же задачу можно решить, разложив силу тяжести шара G по реальным направлениям (направлениям реакций) на составляющие P (сила давления шара на стену) и F (натяжение веревки) , причем согласно аксиоме взаимодействия:
Из построенного параллелограмма (см. рисунок) легко определить искомые величины.
Такой метод решения задачи называют методом разложения силы.
Проекция силы на оси координат
В тех случаях, когда на тело действует более трех сил, а также когда неизвестны направления некоторых сил, удобнее при решении задач пользоваться не геометрическим, а аналитическим условием равновесия, которое основано на методе проекций сил на оси координат.
Проекцией силы на ось называют отрезок оси, заключенный между двумя перпендикулярами, опущенными на ось из начала и конца вектора силы.
На приведенном ниже рисунке видно, что проекции силы P на оси x и y можно определить при помощи тригонометрических функций:
Px = Pcos α, Py = Psin α .
Проекция силы на ось есть величина алгебраическая, которая может быть положительной или отрицательной, что устанавливается по направлению проекции — проекция, направленная в положительном направлении оси считается положительной, в противном случае — отрицательной.
Возможны два частных случая:
— если сила перпендикулярна оси, то ее проекция равна нулю (сила проецируется в точку) ;
— если сила параллельна оси, то она проецируется на ось в натуральную величину.
Зная проекции силы на координатные оси, можно определить ее величину (модуль) , используя теорему Пифагора, учитывая, что проекции являются катетами прямоугольного треугольника, а сама сила — гипотенузой.
Направляющий тангенс угла между вектором силы P и осью x можно определить из отношения:
tgα = Py/Px .
Отметим, что силу P можно представить, как равнодействующую двух составляющих сил Px и Py , параллельных осям координат, но эти составляющие не будут являться проекциями силы по определению, поскольку сила (в т. ч. и составляющая силы) есть величина векторная, а проекция — алгебраическая.
Аналитический способ определения равнодействующей плоской системы сил
Пусть дана плоская система сходящихся сил F1, F2, F3, F4. Fn .
Равнодействующая этой системы FΣ = ΣFi .
В плоскости действия данной системы сил выберем ось координат и спроецируем данные силы и их равнодействующую на эту ось. Из математики известно свойство проекции векторной суммы, на основании которого можно утверждать, что проекция равнодействующей на ось равна алгебраической сумме проекций составляющих сил на ту же ось, т. е. FΣx = ΣFix .
Правую часть этого равенства можно представить упрощенно: FΣx = ΣX .
Для того чтобы определить равнодействующую любой плоской системы сходящихся сил, спроецируем их на оси координат x и y , алгебраически сложим проекции всех сил и найдем таким образом проекции равнодействующей:
Зная проекции, определим модуль и направление равнодействующей:
Модуль равнодействующей:
FΣ = √(FΣx 2 + FΣy 2 ) (здесь и далее √ — знак корня);
Направляющий тангенс угла между вектором FΣ и осью x :
Линия действия равнодействующей проходит через точку пересечения линий действия составляющих сил.
Аналитические условия равновесия плоской системы сходящихся сил
Если данная плоская система сходящихся сил находится в равновесии, то равнодействующая такой системы, а значит и проекции равнодействующей на оси координат равны нулю.
Математически это выражение можно записать так:
Учитывая, что FΣx = ΣX; FΣy = ΣY , получаем равенства, выражающие аналитические условия равновесия плоской системы сходящихся сил:
Формулируется это условие следующим образом: для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы алгебраическая сумма проекций этих сил на каждую из двух координатных осей равнялась нулю.
С помощью уравнений равновесия можно определить два неизвестных элемента данной системы сил, например модуль и направление одной силы или модули двух сил, направления которых известны и т. п.
Выведенные условия равновесия справедливы для любой системы координат, но для упрощения расчетов рекомендуется оси координат по возможности выбирать перпендикулярными неизвестным силам, чтобы каждое уравнение равновесия содержало одно неизвестное.
Когда направление искомой силы неизвестно, ее можно разложить на две составляющие по заданным направлениям, обычно по направлениям координатных осей; по найденным двум составляющим легко определяется неизвестная сила.
Если при решении задач аналитическим способом искомая реакция получается отрицательной, то это означает, что действительное ее направление противоположно направлению, принятому при расчетах.
Геометрический способ сложения сходящихся сил

Геометрический способ сложения сходящихся сил
Системой сходящихся сил называется система сил, линии действия которых пересекаются в одной точке (рис. 15,а). Если мы перенесем все силы такой системы но линиям их действия в общую точку пересечения этих
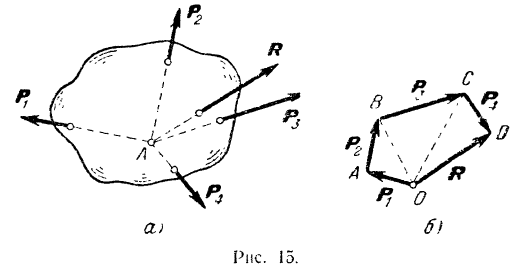
линии, то, согласно первому следствию из аксиом статики, действие системы на абсолютно твердое тело не изменится. Таким образом, любую систему сходящихся сил можно заменить эквивалентной системой сил, приложенных в одной точке.
Задача о сложении двух сил, приложенных к одной точке, геометрически решается построением соответствующего параллелограмма сил (рис. 16) или силового треугольника (рис. 17), изображающего одну из половин параллелограмма.
Для построения силового треугольника из конца вектора одной силы  проводим вектор
проводим вектор  , изображающий вторую силу
, изображающий вторую силу  . Замыкающая сторона
. Замыкающая сторона  треугольника изображает но модулю и по направлению равнодействующую
треугольника изображает но модулю и по направлению равнодействующую  двух данных сходящихся сил.
двух данных сходящихся сил.
Последовательно применяя правило треугольника, можно найти равнодействующую любого числа сходящихся сил, например четырех сил  и
и  (рис. 15, а). Для этого из_произвольной точки
(рис. 15, а). Для этого из_произвольной точки  (рис. 15,6) отложим вектор
(рис. 15,6) отложим вектор  , изображающий в принятом масштабе силу , из конца его— вектор
, изображающий в принятом масштабе силу , из конца его— вектор  , из его конца — вектор
, из его конца — вектор  и т. д., помещая всякий раз начало следующего вектора в конце предыдущего, пока не исчерпаем все силы.
и т. д., помещая всякий раз начало следующего вектора в конце предыдущего, пока не исчерпаем все силы.
Полученный многоугольник  , стороны которого в выбранном масштабе равны модулям составляющих сил и одинаково с ними направлены, называется силовым многоугольником.
, стороны которого в выбранном масштабе равны модулям составляющих сил и одинаково с ними направлены, называется силовым многоугольником.
Очевидно, что равнодействующая  сил
сил  и
и  изображается (рис. 15,6) вектором
изображается (рис. 15,6) вектором  , равнодействующая
, равнодействующая  сил и
сил и  изображается вектором
изображается вектором  ) и замыкающая сторона
) и замыкающая сторона  силового многоугольника, направленная от начала вектора первой силы к концу вектора последней, изображает в выбранном масштабе равнодействующую данной системы сходящихся сил (т. е. сил и ) как по модулю, так и по направлению.
силового многоугольника, направленная от начала вектора первой силы к концу вектора последней, изображает в выбранном масштабе равнодействующую данной системы сходящихся сил (т. е. сил и ) как по модулю, так и по направлению.
Правило сложения сходящихся сил по способу многоугольника является общим правилом сложения любых векторов и называется их геометрическим сложением.
Геометрическая сумма всех сил любой системы называется главным вектором  этой системы
этой системы

Таким образом, можно сказать, что равнодействующая системы сходящихся сил проходит через общую точку пересечения линий действия этих сил и равна по модулю и направлению их главному вектору.
Геометрическая сумма векторов не зависит от перемены мест слагаемых и, следовательно, при изменении порядка сложения сил их главный векгор не изменяется.
В частном случае трех сходящихся сил  и
и  не лежащих в одной плоскости (рис. 18), их равнодействующая изображается по модулю и направлению диагональю параллелепипеда, построенного на векторах составляющих сил (правило параллелепипеда).
не лежащих в одной плоскости (рис. 18), их равнодействующая изображается по модулю и направлению диагональю параллелепипеда, построенного на векторах составляющих сил (правило параллелепипеда).
Эта теория взята с полного курса лекций на странице решения задач с подробными примерами по предмету теоретическая механика:
Возможно вам будут полезны эти дополнительные темы:


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
http://k-a-t.ru/tex_mex/11-statika_plosk_sily/
http://lfirmal.com/geometricheskij-sposob-slozheniya-shodyaschihsya-sil/
Модуль равнодействующей силы
Четверг, 24 декабря, 2015
В данной статье рассказано о том, как найти модуль равнодействующей сил, действующих на тело. Репетитор по математике и физике объяснит вам, как найти суммарный вектор равнодействующей сил по правилу параллелограмма, треугольника и многоугольника. Материал разобран на примере решения задачи из ЕГЭ по физике.
Как найти модуль равнодействующей силы
Сила, которая оказывает на материальную точку такое же действие, как и несколько других сил, называется равнодействующей этих сил. Для нахождения вектора равнодействующей силы необходимо геометрически (векторно) сложить все силы, которые действуют на материальную точку.
Напомним, что сложить векторы геометрически можно с помощью одного из трех правил: правила параллелограмма, правила треугольника или правила многоугольника. Разберём каждое из этих правил в отдельности.
1. Правило параллелограмма. На рисунке по правилу параллелограмма складываются векторы  и
и  . Суммарный вектор есть вектор
. Суммарный вектор есть вектор  :
:

Если векторы и не отложены от одной точки, нужно заменить один из векторов равным и отложить его от начала второго вектора, после чего воспользоваться правилом параллелограмма. Например, на рисунке вектор заменен на равный ему вектор  , и
, и  :
:

2. Правило треугольника. На рисунке по правилу треугольника складываются векторы и . В сумме получается вектор  :
:

Если вектор отложен не от конца вектора , нужно заменить его равным и отложенным от конца вектора , после чего воспользоваться правилом треугольника. Например, на рисунке вектор заменен равным ему вектором  , и
, и  :
:

3. Правило многоугольника. Для того, чтобы сложить несколько векторов по правилу параллелограмма, необходимо от произвольной точки  отложить вектор, равный первому складываемому вектору, от его конца отложить вектор, равный второму складываемому вектору, и так далее. Суммарным будет вектор, проведенный из точки в конец последнего отложенного вектора. На рисунке
отложить вектор, равный первому складываемому вектору, от его конца отложить вектор, равный второму складываемому вектору, и так далее. Суммарным будет вектор, проведенный из точки в конец последнего отложенного вектора. На рисунке  :
:

Задача на нахождение модуля равнодействующей силы
Разберем задачу на нахождение равнодействующей сил на конкретном примере из демонстрационного варианта ЕГЭ по физике 2016 года.

Для нахождения вектора равнодействующей сил найдём геометрическую (векторную) сумму всех изображенных сил, используя правило многоугольника. Упрощенно говоря (не вполне корректно с математической точки зрения), каждый последующий вектор нужно отложить от конца предыдущего. Тогда суммарный вектор будет исходить из точки, из который отложен первоначальный вектор, и приходить в точку, где заканчивается последний вектор:

Требуется найти модуль равнодействующей сил, то есть длину получившегося вектора. Для этого рассмотрим вспомогательный прямоугольный треугольник  :
:

Требуется найти гипотенузу  этого треугольника. «По клеточкам» находим длину катетов:
этого треугольника. «По клеточкам» находим длину катетов:  Н,
Н,  Н. Тогда по теореме Пифагора для этого треугольника получаем:
Н. Тогда по теореме Пифагора для этого треугольника получаем:  Н. То есть искомый модуль равнодействующей сил равен
Н. То есть искомый модуль равнодействующей сил равен  Н.
Н.
Итак, сегодня мы разобрали, как находить модуль равнодействующей силы. Задачи на нахождение модуля равнодействующей силы встречаются в вариантах ЕГЭ по физике. Для решения этих задач необходимо знать определение равнодействующей сил, а также уметь складывать векторы по правилу параллелограмма, треугольника или многоугольника. Стоит немного потренироваться, и вы научитесь решать эти задачи легко и быстро. Удачи вам в подготовке к ЕГЭ по физике!
Репетитор по физике на Юго-Западной
Сергей Валерьевич
|
как находить равнодействующую силу? как найти модуль равнодействующих сил?
Для того чтобы найти равнодействующую всех сил действующих на тело нужно выполнить их векторное сложение.Сделать это можно по правилу треугольника или правилу параллелограмма.Если силы сонаправлены,то равнодействующая будет направлена в ту же сторону,а по модулю равна сумме модулей этих сил.
Trackstone 9 лет назад Необходимо провести векторное сложение всех сил входящих в систему сил, действующих на объект. Знаете ответ? |
Смотрите также: Чему равно фокусное расстояние линзы, оптическая сила которой +2,5 дптр? Как найти оптическую силу собирающих линз с фокусными расст. 5, 20 см, 2 м? ЕГЭ Физика, Как найти оптическую силу собирающей линзы? Какая линза имеет большее фокусное расстояние: +1,5 дптр или -3 дптр? Чему равна выталкивающая сила, действующая на тело, погружённое в жидкость? ВПР Физика 11 класс, Как выполнить задания с экспериментальной установкой? Как обрести уверенность и силу? Что важнее по вашему: внутренняя Духовная сила или сила Физическая? Сила есть, ума не надо. Это о чем? Под воздействием каких сил происходит образование кристаллов снежинки? |




Равнодействующая сходящихся сил
Равнодействующую двух пересекающихся сил можно определить с помощью параллелограмма или треугольника сил (4-я аксиома) (рис. 2.2).
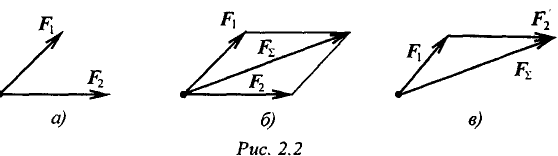
Используя свойства векторной суммы сил, можно получить равнодействующую любой сходящейся системы сил, складывая последовательно силы, входящие в систему. Образуется многоугольник сил (рис. 2.3). Вектор равнодействующей силы соединит начало первого вектора с концом последнего.
При графическом способе определения равнодействующей векторы сил можно вычерчивать в любом порядке, результат (величина и направление равнодействующей) при этом не изменится.
Вектор равнодействующей направлен навстречу векторам сил-слагаемых. Такой способ получения равнодействующей называют геометрическим.
Замечание. При вычерчивании многоугольника обращать внимание на параллельность сторон многоугольника соответствующим векторам сил.
Эта теория взята со страницы решения задач по предмету «техническая механика»:
Примеры решения задач технической механике
Возможно эти страницы вам будут полезны:

Как определить равнодействующую силу
Независимо от того, движется тело или находится в покое, на него постоянно действуют физические силы. Как правило, их несколько, но при решении задач удобнее определить равнодействующую сил.
Инструкция
Чтобы определить равнодействующую, нужно найти суммарную силу, действие которой равнозначно совокупному действию всех сил. Для этого применимы законы векторной алгебры, поскольку любая физическая сила имеет направление и модуль. Имеет место принцип суперпозиции, согласно которому каждая сила сообщает телу ускорение независимо от присутствия других сил.
Нарисуйте график задачи, используя вектора для представления сил. Начало каждого такого вектора – это точка приложения силы, т.е. само тело или тела, если рассматривается механическая система. Например, вектор силы тяжести должен быть направлен вертикально вниз, направление вектора внешней силы совпадает с направлением движения и т.д.
Посмотрите внимательно на график. Определите, как вектора различных сил направлены друг относительно друга. В зависимости от этого произведите расчет их равнодействующей. В соответствии с принципом суперпозиции ее вектор равен геометрической сумме всех сил.
Может возникнуть четыре ситуации:Силы направлены в одну сторону. Тогда вектор равнодействующей коллинеарен векторам этих сил и равен их сумме:|F| = |f1| + |f2|.Силы направлены в разные стороны. В этом случае модуль равнодействующей равен разности модулей большей и меньшей силы. Ее вектор направлен в сторону большей силы:|F| = |f1| – |f2|, где |f1| > |f2|.Силы направлены под прямым углом. Тогда вычислите модуль равнодействующей по правилу треугольника сложения векторов. Ее вектор будет направлен по гипотенузе прямоугольного треугольника, образованного векторами сил. При этом начало второго вектора совпадает с концом первого, следовательно, направление равнодействующей снова будет определяться направлением большей силы:|F| = √(|f1|² + |f2|²).Силы направлены под углом, отличным от 90°. По правилу параллелограмма сложения векторов модуль равнодействующей равен:|F| = √(|f1|² + |f2|² – 2•|f1|•|f2|•cos α), где α — угол между векторами сил f1 и f2, направление равнодействующей определяется аналогично предыдущему случаю.
Видео по теме
Войти на сайт
или
Забыли пароль?
Еще не зарегистрированы?
This site is protected by reCAPTCHA and the Google Privacy Policy and Terms of Service apply.