Содержание:
Плоская система сил:
Плоскую систему сил можно привести к более простой системе сил, состоящей из силы или пары сил. Эти случаи возможны, если система сил не находится в равновесии, т. е. если одновременно не равны нулю главные вектор и момент системы сил. Рассмотрим эти частные случаи.
Случай приведения к равнодействующей силе
- Если при приведении плоской системы сил к какому-либо центру окажется, что главный вектор
 Равнодействующая сила в этом случае проходит через центр приведения, а по величине и направлению совпадает с главным вектором .
Равнодействующая сила в этом случае проходит через центр приведения, а по величине и направлению совпадает с главным вектором . - Если при приведении плоской системы сил главный вектор и главный момент , то такую систему можно упростить и привести к одной равнодействующей силе .
 Равнодействующая сила
Равнодействующая сила  и главный момент
и главный момент  , то такую систему можно упростить и привести к одной равнодействующей силе
, то такую систему можно упростить и привести к одной равнодействующей силе Эта сила по величине и направлению совпадает с главным вектором  , но ее линия действия отстоит от первоначального центра приведения на расстоянии
, но ее линия действия отстоит от первоначального центра приведения на расстоянии  (рис. 40), которое определяют из соотношения
(рис. 40), которое определяют из соотношения
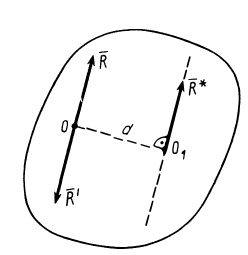
Рис. 40
Действительно, пусть при приведении к точке  получаются главный вектор и пара сил, алгебраический момент которой равен главному моменту
получаются главный вектор и пара сил, алгебраический момент которой равен главному моменту  . По теореме об эквивалентности пар сил, расположенных в одной плоскости, пару сил можно поворачивать, передвигать в плоскости ее действия и изменять плечо и силы пары, сохраняя ее алгебраический момент. Выберем силы
. По теореме об эквивалентности пар сил, расположенных в одной плоскости, пару сил можно поворачивать, передвигать в плоскости ее действия и изменять плечо и силы пары, сохраняя ее алгебраический момент. Выберем силы  ,
,  , входящие в пару сил, равными по величине главному вектору. Тогда плечо пары сил
, входящие в пару сил, равными по величине главному вектору. Тогда плечо пары сил  определим по формуле
определим по формуле

Повернем пару сил, чтобы ее силы были параллельны главному вектору  , а точку приложения силы пары, противоположной по направлению главному вектору, совместим с центром приведения . Тогда
, а точку приложения силы пары, противоположной по направлению главному вектору, совместим с центром приведения . Тогда

Так как  , то такую систему сил можно отбросить.
, то такую систему сил можно отбросить.
Итак, систему сил, приведенную к силе с парой сил, в том случае, когда  и
и  , можно упростить и привести к одной силе
, можно упростить и привести к одной силе  —равнодействующей заданной системы сил, отстоящей от центра приведения на расстоянии
—равнодействующей заданной системы сил, отстоящей от центра приведения на расстоянии
Равнодействующую силу , приложенную к твердому телу, можно перенести в любую точку линии ее действия. Случай, когда  , возможен, если за центр приведения взять точку, лежащую на линии действия равнодействующей силы .
, возможен, если за центр приведения взять точку, лежащую на линии действия равнодействующей силы .
Случай приведения к паре сил
Если при приведении плоской системы су л к какому-либо центру окажется, что главный вектор  , а главный момент
, а главный момент  , то такую плоскую систему сил можно привести к одной паре сил, алгебраический момент которой равен главному моменту системы сил относительно центра приведения, и в этом случае главный момент не зависит от выбора центра приведения.
, то такую плоскую систему сил можно привести к одной паре сил, алгебраический момент которой равен главному моменту системы сил относительно центра приведения, и в этом случае главный момент не зависит от выбора центра приведения.
Если главный вектор равен нулю при приведении к одному какому-либо центру, то он равен нулю и при приведении к любому другому центру, так как главный вектор, являясь векторной суммой сил системы, не зависит от выбора центра приведения. Главный момент не зависит от центра приведения только в том случае, когда . В других случаях главный момент системы зависит от выбора центра приведения. Если бы при главный момент зависел от центра приведения, то одна и та же плоская система сил была бы эквивалентна парам сил, имеющим разные алгебраические моменты, что невозможно, так как эквивалентные пары сил, лежащие в одной плоскости, имеют одинаковые алгебраические моменты.
Таким образом, рассмотрены случаи, которые возможны при приведении плоской системы сил к какому-либо центру. Если и  , то система сил находится в равновесии; если
, то система сил находится в равновесии; если  , a , или ,
, a , или ,  , то система сил приводится к одной равнодействующей силе; если , , то система приводится к одной паре сил.
, то система сил приводится к одной равнодействующей силе; если , , то система приводится к одной паре сил.
Теорема о моменте равнодействующей силы (Теорема Вариньона)
Для случая, когда любая система сил, приложенных к твердому телу, плоская или пространственная, приводится к равнодействующей силе, часто применяют так называемую теорему Вариньона: векторный момент равнодействующей рассматриваемой системы сил относительно любой точки равен сумме векторных моментов всех сил этой системы относительно той же точки.
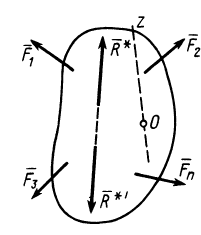
Рис. 41
Пусть на твердое тело действует любая система сил  (рис. 41), имеющая равнодействующую , т. е.
(рис. 41), имеющая равнодействующую , т. е.

Добавим к заданной системе сил ее уравновешивающую силу  , которая равна по модулю, но противоположна по направлению равнодействующей силе и имеет с ней общую линию действия. Тогда
, которая равна по модулю, но противоположна по направлению равнодействующей силе и имеет с ней общую линию действия. Тогда

т.е. при добавлении к системе сил уравновешивающей силы, согласно определению уравновешивающей силы, образуется новая система сил, эквивалентная нулю и, следовательно, удовлетворяющая условиям равновесия системы сил, приложенных к твердому телу. В частности, сумма векторных моментов сил этой новой системы сил относительно любой точки равна нулю:

но

так как и — две равные и противоположно направленные силы, действующие вдоль одной прямой. Подставляя (5) в (4), получаем
откуда следует теорема Вариньона

Если правую и левую части векторного равенства (6) спроецировать на произвольную ось  , проходящую через точку , то, учитывая связь момента силы относительно оси с проекцией векторного момента относительно точки на оси, получим теорему Вариньона относительно оси :
, проходящую через точку , то, учитывая связь момента силы относительно оси с проекцией векторного момента относительно точки на оси, получим теорему Вариньона относительно оси :

т. е. момент равнодействующей силы относительно произвольной оси равен сумме моментов сил системы относительно той же оси.
Для случая плоской системы сил, если точку выбрать в плоскости действия сил, из (6) получаем

Это теорема Вариньона для плоской системы сил: алгебраический момент равнодействующей плоской системы сил относительно любой точки, лежащей в плоскости действия сил, равен сумме алгебраических моментов всех сил этой системы относительно той же точки.
Различные формы условий равновесия плоской системы сил
Получены общие условия равновесия плоской системы сил, действующих на твердое тело, в следующей форме:

Условия равновесия (9) назовем условиями равновесия плоской системы сил в первой форме.
Условия равновесия плоской системы сил, приложенных к твердому телу, можно сформулировать в других эквивалентных формах. Существуют еще две эквивалентные формы необходимых и достаточных условий равновесия.
Рассмотрим эти условия равновесия в виде теоремы о трех моментах и третьей формы условий равновесия.
Теорема о трех моментах (вторая форма условий равновесия)
Для равновесия плоской системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы алгебраических моментов сил системы относительно трех любых точек, расположенных в плоскости действия сил и не лежащих на одной прямой, были равны нулю, т. е.

Необходимость этих условий равновесия плоской системы сил обусловлена тем, что если плоская система сил находится в равновесии, то силы этой системы удовлетворяют условиям равновесия в первой основной форме (9). А тогда из последнего условия (9) следует, что сумма алгебраических моментов сил относительно любой точки (следовательно, и точек  ,
,  ,
,  ) равна нулю (рис. 42).
) равна нулю (рис. 42).
Для доказательства достаточности условий (10) для равновесия плоской системы сил, действующих на твердое тело, можно привести следующие рассуждения. Так как главные моменты относительно трех точек  ,
,  и
и  равны нулю, то для любой из этих точек, взятых за центр приведения, система приводится или к равнодействующей, если главный вектор системы отличен от нуля, или система сил оказывается в равновесии, если главный вектор системы равен нулю. Предположим, что она приводится к равнодействующей силе
равны нулю, то для любой из этих точек, взятых за центр приведения, система приводится или к равнодействующей, если главный вектор системы отличен от нуля, или система сил оказывается в равновесии, если главный вектор системы равен нулю. Предположим, что она приводится к равнодействующей силе  . Тогда если выбрать за центр приведения точку
. Тогда если выбрать за центр приведения точку  , то, используя теорему Вариньона (8), согласно (10), получим
, то, используя теорему Вариньона (8), согласно (10), получим
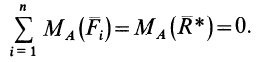
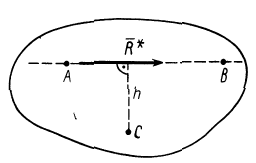
Рис. 42
Выбрав за центр приведения точку , аналогично имеем
Эти условия для равнодействующей силы , отличной от нуля, могут выполняться в том случае, если линия действия равнодействующей силы  проходит через точки и .
проходит через точки и .
Из последнего условия (10) после применения теоремы Вариньона получаем

Но  , так как точка не находится на прямой, проходящей через точки и . Следовательно, равнодействующая сила равна нулю, что и является достаточным условием равновесия плоской системы сил, приложенных к твердому телу.
, так как точка не находится на прямой, проходящей через точки и . Следовательно, равнодействующая сила равна нулю, что и является достаточным условием равновесия плоской системы сил, приложенных к твердому телу.
Третья форма условий равновесия
Условия равновесия плоской системы сил можно сформулировать и так: для равновесия плоской системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы алгебраических моментов сил относительно двух любых точек, лежащих в плоскости действия сил, были равны нулю и алгебраическая сумма проекций этих сил на какую-либо ось плоскости, не перпендикулярную прямой, проходящей через две моментные точки, также была равна нулю, т. е.

где за ось  принята любая прямая, не перпендикулярная
принята любая прямая, не перпендикулярная  . Необходимость условий (11) для равновесия плоской системы сил следует из первой формы условий равновесия (9). Первая часть теоремы о достаточности условий (11) для равновесия (линия действия равнодействующей силы
. Необходимость условий (11) для равновесия плоской системы сил следует из первой формы условий равновесия (9). Первая часть теоремы о достаточности условий (11) для равновесия (линия действия равнодействующей силы  проходит через точки и ) доказывается так же, как и в теореме о трех моментах.
проходит через точки и ) доказывается так же, как и в теореме о трех моментах.
Из последнего условия (11) (рис.43) следует, что
Но
так как ось  не перпендикулярна прямой, проходящей через точки и . Следовательно, равнодействующая сила
не перпендикулярна прямой, проходящей через точки и . Следовательно, равнодействующая сила  равна нулю, что и доказывает достаточность условий (11) для равновесия плоской системы сил, приложенных к твердому телу.
равна нулю, что и доказывает достаточность условий (11) для равновесия плоской системы сил, приложенных к твердому телу.
В частном случае плоской системы параллельных сил можно сформулировать другую форму условий равновесия этой системы сил: для равновесия плоской системы параллельных сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы алгебраических моментов сил относительно двух любых точек, лежащих в плоскости сил, были равны нулю, т. е.

Точки и нельзя брать на прямой линии, параллельной силам.
При применении условий равновесия (12) удобно за момент-ные точки и брать точки, через которые проходят искомые силы, например реакции связей. В этом случае получаются такие уравнения для определения искомых сил, в каждое из которых входит только по одной неизвестной силе; эти уравнения, как правило, решаются проще, чем уравнения, в каждое из которых входят обе неизвестные силы.
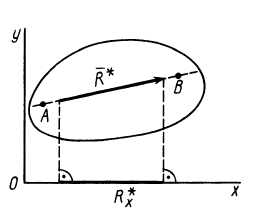
Рис. 43
Статически определимые и статически неопределимые задачи
Для любой плоской системы сил, действующих на твердое тело, имеется только три независимых условия равновесия, каждое из которых не является следствием двух других. Независимые условия равновесия можно брать в трех различных формах.
Следовательно, для любой плоской системы сил из условий равновесия можно найти не более трех неизвестных, а для плоских систем параллельных и сходящихся сил — не более двух неизвестных. Если в какой-либо задаче число неизвестных окажется больше числа независимых условий равновесия, то такую задачу нельзя решить методами статики без рассмотрения прежде всего деформаций тела, т. е. без отказа от основной гипотезы статики об абсолютно твердом теле.
Задачи, в которых число неизвестных не больше числа независимых условий равновесия для данной системы сил, приложенных к твердому телу, называют статически определимыми. Для любой плоской системы сил, приложенных к твердому телу, в статически определимой задаче число неизвестных должно быть не больше трех, а для плоских систем параллельных и сходящихся сил — не больше двух.
Пример простейшей статически неопределимой задачи приведен на рис. 44, где представлена балка заданной длины, закрепленная на концах с помощью двух неподвижных цилиндрических шарниров и . На балку действуют активные силы  и
и  . Известны также и точки приложения этих сил. Так как для цилиндрического шарнира имеются две неизвестные, например составляющие силы реакции по осям координат, то число неизвестных будет четыре, а независимых условий равновесия можно составить только три.
. Известны также и точки приложения этих сил. Так как для цилиндрического шарнира имеются две неизвестные, например составляющие силы реакции по осям координат, то число неизвестных будет четыре, а независимых условий равновесия можно составить только три.
Чтобы сделать задачу статически определимой, надо балку на одном конце закрепить, например с помощью так называемой катко-вой опоры. Тогда одна неизвестная будет равна нулю; если катковая опора находится в точке  и плоскость опоры катков параллельна оси
и плоскость опоры катков параллельна оси  , то сила
, то сила  равна нулю.
равна нулю.
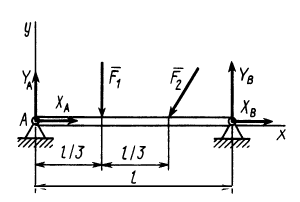
Рис. 44
Равновесие системы тел
Рассмотрим равновесие сил, приложенных к системе нескольких взаимодействующих между собой тел. Тела могут быть соединены между собой с помощью шарниров, соприкасаться друг с другом и взаимодействовать одно с другим, вызывая силы взаимодействия. Такую систему взаимодействующих тел иногда называют сочлененной системой тел.
Силы, действующие на рассматриваемую систему тел, можно разделить на внешние и внутренние.
Внешними называют силы, с которыми на тела рассматриваемой системы действуют тела, не входящие в эту систему.
Внутренними называют силы взаимодействия между телами рассматриваемой системы.
Если, например, рассматриваемой системой тел является железнодорожный поезд, то внешними силами являются силы веса вагонов и тепловоза, действие рельсов на колеса вагонов и тепловоза, силы сопротивления воздуха. Внутренними силами являются натяжения в стяжках, сила давления газа и т. п.
Силы веса для любой системы тел, в которую не входит Земля, всегда являются внешними.
При рассмотрении равновесия сил, приложенных к системе тел, можно мысленно расчленить систему тел на отдельные твердые тела и к силам, действующим на эти тела, применить условия равновесия, полученные для одного тела. В эти условия равновесия войдут как внешние, так и внутренние силы системы тел. Внутренние силы на основании аксиомы о равенстве сил действия и противодействия в каждой точке сочленения двух тел образуют равновесную систему сил (силы  и
и  , рис. 45). Поэтому внешние силы, действующие на систему тел отдельно, без внутренних сил, удовлетворяют условиям равновесия сил, приложенных к твердому телу, за которое следует принять эту систему тел.
, рис. 45). Поэтому внешние силы, действующие на систему тел отдельно, без внутренних сил, удовлетворяют условиям равновесия сил, приложенных к твердому телу, за которое следует принять эту систему тел.
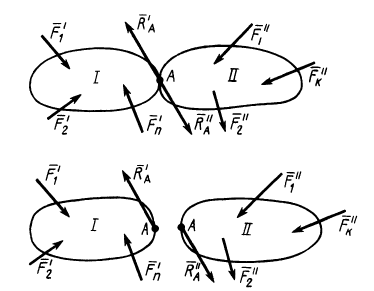
Рис. 45
Покажем это на примере системы двух тел и плоской системы сил (рис. 45). Если составить условия равновесия для каждого твердого тела системы тел, то для тела 

для тела 

Кроме того, из аксиомы о равенстве сил действия и противодействия для двух взаимодействующих тел имеем

и

Если сложить (13) и (14), учитывая (15 и (16), то

Представленные равенства и есть условия равновесия внешних сил, действующих на систему двух тел.
Для системы  тел в том случае, когда на каждое тело действует любая плоская система сил, можно составить
тел в том случае, когда на каждое тело действует любая плоская система сил, можно составить  условий равновесия и, следовательно, определить
условий равновесия и, следовательно, определить  неизвестных. Если число неизвестных больше
неизвестных. Если число неизвестных больше  , то задача является статически неопределимой. В случае статически определимой задачи
, то задача является статически неопределимой. В случае статически определимой задачи  условий равновесия можно получить, если составлять их для каждого тела отдельно, учитывая и силы взаимодействия тел, или составлять условия равновесия для любых комбинаций групп тел, в том числе и для всей рассматриваемой системы тел. При этом внутренние силы для отдельных групп тел учитывать не надо.
условий равновесия можно получить, если составлять их для каждого тела отдельно, учитывая и силы взаимодействия тел, или составлять условия равновесия для любых комбинаций групп тел, в том числе и для всей рассматриваемой системы тел. При этом внутренние силы для отдельных групп тел учитывать не надо.
Распределенные силы
В статике рассматривают силы, приложенные к твердому телу в какой-либо его точке, и поэтому такие силы называют сосредоточенными. В действительности обычно силы бывают приложены к какой-либо части объема тела или его поверхности, а иногда к некоторой части линии. Так как все аксиомы и теоремы статики формулируются для сосредоточенных сил, приложенных к твердому телу, то необходимо рассмотреть способы перехода от распределенных сил к сосредоточенным в простейших, наиболее часто возникающих случаях.
Распределенные силы прежде всего характеризуются интенсивностью распределенной силы, т.е. силой, приходящейся на единицу объема, поверхности или длины линии. В основном встречаются параллельные и сходящиеся распределенные силы. К параллельным силам, распределенным по объему тела, относится вес частиц этого тела. Сила давления воды на плотину относится к распределенным параллельным силам по поверхности плотины. Сила тяжести частиц тонкой проволоки характеризует распределенные силы по длине линии.
Рассмотрим замену сосредоточенными силами только распределенных сил по длине линии, т. е. линейных распределенных сил. Для простоты возьмем случаи, когда отрезок линии, по которому распределены силы, является отрезком прямой, а интенсивность этих сил или постоянна (силы распределены по прямоугольнику), или распределена по линейному закону, в простейшем случае — по треугольнику. Комбинируя эти два случая, можно получить линейное распределение интенсивности распределенной силы в более общем случае.
Параллельные силы постоянной интенсивности, распределенные по отрезку прямой линии
Пусть на участке  прямой линии длиной
прямой линии длиной  распределены параллельные силы, интенсивность которых
распределены параллельные силы, интенсивность которых  постоянна (рис. 46, а). Заменим эти распределенные силы сосредоточенными. Для этого отрезок
постоянна (рис. 46, а). Заменим эти распределенные силы сосредоточенными. Для этого отрезок  разобьем на отрезки достаточно малых размеров по сравнению с его длиной. На каждый такой малый отрезок действует сила
разобьем на отрезки достаточно малых размеров по сравнению с его длиной. На каждый такой малый отрезок действует сила  которую при достаточной малости длины отрезка
которую при достаточной малости длины отрезка  можно считать сосредоточенной силой. Заменяя полученную таким образом систему сосредоточенных параллельных сил
можно считать сосредоточенной силой. Заменяя полученную таким образом систему сосредоточенных параллельных сил  одной равнодействующей силой, получим
одной равнодействующей силой, получим
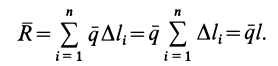
Рис. 46
Равнодействующая  параллельна распределенным силам и приложена вследствие симметрии распределения сил в середине отрезка
параллельна распределенным силам и приложена вследствие симметрии распределения сил в середине отрезка  .
.
Если параллельные силы постоянной интенсивности  распределены по отрезку прямой, наклоненному к распределенным силам, то модуль равнодействующей
распределены по отрезку прямой, наклоненному к распределенным силам, то модуль равнодействующей  таких сил равен
таких сил равен  . Линия действия ее, параллельная распределенным силам, проходит через середину отрезка (рис. 46, б). Модуль равнодействующей в этом случае не равен площади параллелограмма, образованного прямой
. Линия действия ее, параллельная распределенным силам, проходит через середину отрезка (рис. 46, б). Модуль равнодействующей в этом случае не равен площади параллелограмма, образованного прямой  и распределенными силами.
и распределенными силами.
Параллельные силы, распределенные по отрезку прямой с интенсивностью, изменяющейся по линейному закону
Рассмотрим распределенные параллельные силы, изменяющиеся по линейному закону (рис. 47, а). Обычно считают, что такие силы распределены по треугольнику. Параллельные распределенные по треугольнику силы приводятся к равнодействующей , по модулю равной
где  — наибольшая интенсивность силы. Это легко можно проверить путем сложения параллельных сосредоточенных сил
— наибольшая интенсивность силы. Это легко можно проверить путем сложения параллельных сосредоточенных сил  , приложенных к каждому элементарному отрезку длиной
, приложенных к каждому элементарному отрезку длиной  . Наиболее просто это можно сделать путем интегрирования. Действительно,
. Наиболее просто это можно сделать путем интегрирования. Действительно,
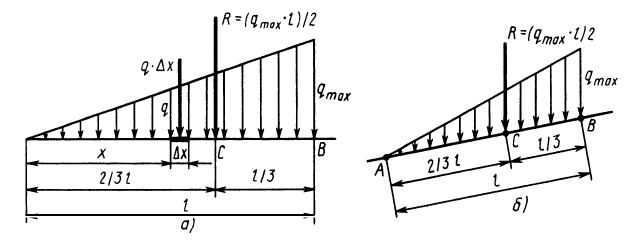
Рис. 47
Если  отсчитывать от точки
отсчитывать от точки  , то из подобия треугольников имеем
, то из подобия треугольников имеем
После этого, вставляя под интеграл вместо  его значение, получаем
его значение, получаем
Точка приложения  равнодействующей силы смещается в сторону, где интенсивность силы больше, и совпадает с центром тяжести площади треугольника, который находится в точке пересечения медиан, расположенной на расстоянии
равнодействующей силы смещается в сторону, где интенсивность силы больше, и совпадает с центром тяжести площади треугольника, который находится в точке пересечения медиан, расположенной на расстоянии  от основания треугольника и
от основания треугольника и  от его вершины
от его вершины  , т. е.
, т. е.  . Точку приложения равнодействующей силы можно также определить вычислив момент элементарных сосредоточенных сил
. Точку приложения равнодействующей силы можно также определить вычислив момент элементарных сосредоточенных сил  , например относительно точки , и применив затем теорему Вариньона о моменте равнодействующей силы.
, например относительно точки , и применив затем теорему Вариньона о моменте равнодействующей силы.
Имеем
Заменяя его значением  , получаем
, получаем
Учитывая, что  найдем
найдем
Если параллельные силы с интенсивностью, изменяющейся по линейному закону, распределены по отрезку прямой, наклоненному к направлению сил (рис. 47, б), то их равнодействующая  и делит отрезок
и делит отрезок  так же, как и в том случае, когда распределенные силы перпендикулярны отрезку
так же, как и в том случае, когда распределенные силы перпендикулярны отрезку  . Величина равнодействующей в этом случае не равна площади треугольника, образованного отрезком прямой и распределенными силами.
. Величина равнодействующей в этом случае не равна площади треугольника, образованного отрезком прямой и распределенными силами.
В более сложных случаях распределенных сил равнодействующую силу и ее точку приложения обычно определяют путем интегрирования и применения теоремы Вариньона. Величину равнодействующей в случае непараллельных распределенных сил находят так же, как и для параллельных, только суммируют (и, следовательно, интегрируют) не элементарные сосредоточенные силы  , а их проекции на оси координат. По проекциям уже вычисляют равнодействующую силу и косинусы ее углов с осями координат.
, а их проекции на оси координат. По проекциям уже вычисляют равнодействующую силу и косинусы ее углов с осями координат.
Реакция заделки
Пусть имеем тело, например балку  , один конец которой
, один конец которой  заделан в стену (рис. 48, а). Такое крепление конца балки
заделан в стену (рис. 48, а). Такое крепление конца балки  называют заделкой в точке
называют заделкой в точке  . Пусть на балку действует плоская система сил
. Пусть на балку действует плоская система сил  . Определим силы, которые надо приложить в точке (сечении)
. Определим силы, которые надо приложить в точке (сечении)  балки, если часть балки
балки, если часть балки  отбросить.
отбросить.
К части балки  при освобождении ее от заделки в стене приложены распределенные силы. Если эти силы заменить элементарными сосредоточенными силами и затем привести их к точке , то в точке получим силу
при освобождении ее от заделки в стене приложены распределенные силы. Если эти силы заменить элементарными сосредоточенными силами и затем привести их к точке , то в точке получим силу  (главный вектор элементарных сосредоточенных сил
(главный вектор элементарных сосредоточенных сил  ) и пару сил с моментом
) и пару сил с моментом  (главный момент относительно точки элементарных сил
(главный момент относительно точки элементарных сил  ) Момент
) Момент  называют моментом заделки.
называют моментом заделки.
Таким образом, заделка в отличие от шарнира создает не только не известную по величине и направлению реакцию  , но еще и пару сил с не известным заранее моментом в заделке
, но еще и пару сил с не известным заранее моментом в заделке  (рис. 48, б).
(рис. 48, б).
Очевидно, если рассмотреть любую часть балки, расчленив ее мысленно по сечению  , то в месте расчленения надо приложить неизвестные силу и пару сил, заменяющие действие отброшенной части балки на рассматриваемую ее часть, причем сила и момент пары сил, действующие на различные части балки, будут иметь противоположные направления действия и вращения соответственно, как всякое действие и противодействие.
, то в месте расчленения надо приложить неизвестные силу и пару сил, заменяющие действие отброшенной части балки на рассматриваемую ее часть, причем сила и момент пары сил, действующие на различные части балки, будут иметь противоположные направления действия и вращения соответственно, как всякое действие и противодействие.
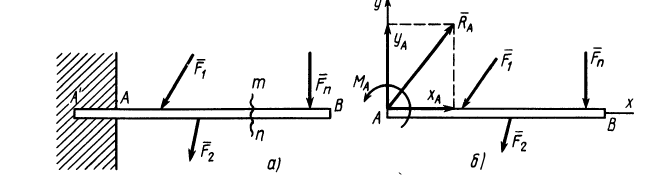
Рис. 48
Решение задач на равновесие плоской системы сил, приложенных к твердому телу и системе тел
Рассмотрим общие положения о решении задач на равновесие плоской системы сил, действующих на одно твердое тело и на систему тел. Весь процесс решения задачи на равновесие сил можно расчленить на ряд этапов, которые характерны для большинства задач.
К выбранному для рассмотрения телу или системе тел надо приложить все действующие силы, как активные, так и реакции связей; если нужно, расчленить систему тел на отдельные тела или группы тел. Если связью является абсолютно гладкая поверхность какого-либо тела, то реакция связи в этом случае направлена по нормали к общей касательной в точке соприкосновения в сторону, противоположную тому направлению, в котором связь препятствует перемещению рассматриваемого тела.
Если связью является цилиндрический шарнир, позволяющий телу вращаться вокруг его оси, то реакцию шарнира, лежащую в плоскости, перпендикулярной оси, следует разложить на две заранее не известные составляющие по положительным направлениям осей координат. Если эти составляющие после их определения из уравнений равновесия будут иметь знак минус, то составляющие реакции направлены противоположно положительному направлению осей координат.
Все гибкие связи (канаты, тросы, ремни и т. п.) создают реакции, направленные по касательной к гибкой связи в данной точке.
Если связью является заделка, которая в отличие от цилиндрического шарнира не позволяет телу поворачиваться, то кроме двух неизвестных составляющих реакций в этой точке надо еще приложить пару сил с не известным заранее моментом заделки.
Эти же случаи связей возможны и при расчленении систем тел.
Выявление всех сил, действующих на рассматриваемое тело или систему тел, особенно правильная замена различных видов связей их реакциями, является одним из главных этапов при решении задач на равновесие.
При расчленении системы тел надо следить, чтобы силы взаимодействия между телами или группами тел сочленной системы в точках сочленения были равны по модулю, но противоположны по направлению. При рассмотрении системы тел (или их группы) силы взаимодействия между телами системы (или их группы) прикладывать не нужно, так как эти силы являются внутренними и в уравнения равновесия для системы тел (или группы) не войдут.
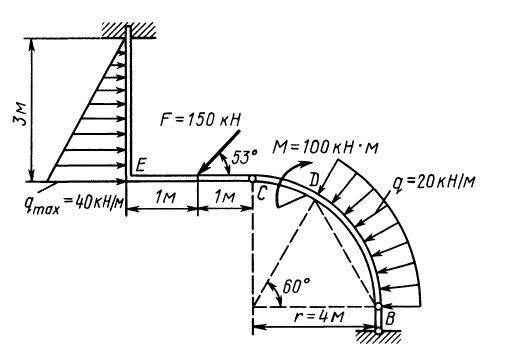
Рис. 49
После выявления всех сил надо выбрать оси координат и моментные точки, а затем, составив условия равновесия сил в одной из форм, решить полученные уравнения относительно неизвестных.
Решение уравнений будет более простым, если при их составлении в каждое из уравнений добавляется по одной новой неизвестной. Этого удается достичь, если за моментную точку брать такую, в которой пересекаются две искомые силы. Такой точкой обычно является цилиндрический шарнир. Оси координат надо брать так, чтобы одна или две неизвестные силы были перпендикулярны одной из осей координат и, следовательно, параллельны другой оси. В этом случае в соответствующее условие равновесия для одного тела войдет только одна неизвестная сила.
Приведем примеры решения задачи на плоскую систему сил.
Пример 1.
Дана система двух твердых тел, соединенных с помощью шарнира  (рис.49). Балка
(рис.49). Балка  , изогнутая под прямым углом, имеет заделку в точке
, изогнутая под прямым углом, имеет заделку в точке  . Круговая арка
. Круговая арка  закреплена в точке
закреплена в точке  с помощью стержня, имеющего на концах шарниры. Размеры тел и приложенные силы указаны на рисунке. Дуговая стрелка условно обозначает пару сил. Силами тяжести тел пренебречь. Определить силы реакций в точках и
с помощью стержня, имеющего на концах шарниры. Размеры тел и приложенные силы указаны на рисунке. Дуговая стрелка условно обозначает пару сил. Силами тяжести тел пренебречь. Определить силы реакций в точках и  .
.
Решение. Заменим распределенные силы сосредоточенными. Величина равнодействующей силы  (рис. 50) распределенных по треугольнику сил на участке
(рис. 50) распределенных по треугольнику сил на участке  определяется по формуле
определяется по формуле

Точка приложения силы  отстоит от точки
отстоит от точки  на
на  , т.е. на 1 м. Значение равнодействующей
, т.е. на 1 м. Значение равнодействующей  распределенных по арке радиальных сил определяем как произведение длины хорды
распределенных по арке радиальных сил определяем как произведение длины хорды  , стягивающей дугу
, стягивающей дугу  , на интенсивность распределенных сил
, на интенсивность распределенных сил  , т. е.
, т. е.

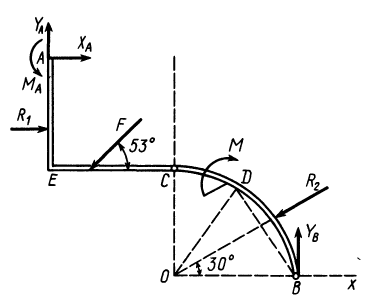
Рис. 50
Линия действия равнодействующей силы  вследствие симметрии распределения сил проходит через центр арки
вследствие симметрии распределения сил проходит через центр арки  , деля угол, стягивающий арку, на равные части.
, деля угол, стягивающий арку, на равные части.
Рассмотрим сначала равновесие системы двух тел, состоящих из балки  и арки
и арки  . На эту группу тел действуют силы
. На эту группу тел действуют силы  пара сил с моментом
пара сил с моментом  , силы реакций в заделке
, силы реакций в заделке  и в опоре
и в опоре  .
.
Реакции заделки в точке  в общем случае дают три неизвестные: две составляющие силы по осям координат и момент пары сил; одна неизвестная сила имеется в точке
в общем случае дают три неизвестные: две составляющие силы по осям координат и момент пары сил; одна неизвестная сила имеется в точке  . Ее дает шарнирный стержень. Таким образом, имеем четыре неизвестные, а независимых уравнений для их определения — только три. Систему тел следует расчленить на отдельные тела (рис. 51), приложив к каждому из них в точке
. Ее дает шарнирный стержень. Таким образом, имеем четыре неизвестные, а независимых уравнений для их определения — только три. Систему тел следует расчленить на отдельные тела (рис. 51), приложив к каждому из них в точке  силы действия одного тела на другое, которые равны по величине, но противоположны по направлению.
силы действия одного тела на другое, которые равны по величине, но противоположны по направлению.
В дальнейшем целесообразно на рисунках у стрелок, изображающих силы, ставить только буквы, обозначающие значения сил, без знака вектора над ними (рис. 51). Это уменьшит число неизвестных и, следовательно, количество уравнений для их определения.
Всего имеется шесть неизвестных, считая составляющие силы реакции в шарнире  . Составляя по три уравнения равновесия сил для каждого тела, можно получить шесть уравнений для нахождения из них всех неизвестных. Требуется определить только четыре неизвестные реакции в точках
. Составляя по три уравнения равновесия сил для каждого тела, можно получить шесть уравнений для нахождения из них всех неизвестных. Требуется определить только четыре неизвестные реакции в точках  и
и  . Поэтому составим уравнения так, чтобы в них не входили реакции в точке
. Поэтому составим уравнения так, чтобы в них не входили реакции в точке  и по возможности в каждое уравнение входило не более одной новой неизвестной.
и по возможности в каждое уравнение входило не более одной новой неизвестной.
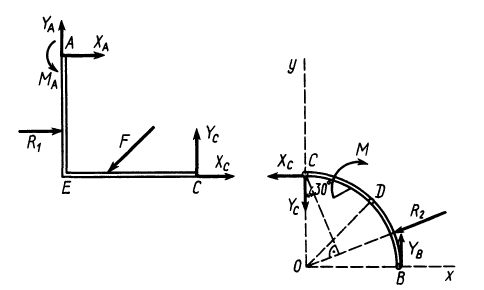
Рис. 51
Составим для арки  одно условие равновесия сил в форме суммы моментов сил относительно точки . Имеем
одно условие равновесия сил в форме суммы моментов сил относительно точки . Имеем

откуда получаем  .
.
После этого для всей системы тел применим условие равновесия в форме суммы проекций сил на оси  и
и  . Получим
. Получим

откуда  .
.
Для определения момента пары сил  в заделке достаточно применить для тела условие равновесия в форме суммы моментов сил относительно точки . Имеем
в заделке достаточно применить для тела условие равновесия в форме суммы моментов сил относительно точки . Имеем

откуда  .
.
Если дополнительно требуется определить силы  и
и  , то следует применить условия равновесия для тела в форме проекций сил на оси и . Тогда
, то следует применить условия равновесия для тела в форме проекций сил на оси и . Тогда

Из этих уравнений получаем

Для контроля правильности определения реакций в точках и следует составить условие равновесия, например, в форме суммы моментов сил относительно точки  для всей системы. Полученные ранее значения неизвестных должны обратить его в тождество.
для всей системы. Полученные ранее значения неизвестных должны обратить его в тождество.
Задача считается решенной, если известны проекции искомых сил на оси координат, так как по проекциям легко определяются модули этих сил и косинусы углов сил с осями координат.
Пример 2.
Для системы тел, находящихся в равновесии, определить реакцию шарнира  (рис. 52). Необходимые данные указаны на рисунке. Стержни
(рис. 52). Необходимые данные указаны на рисунке. Стержни  и
и  , блоки и нить считать невесомыми. Трением в шарнирах пренебречь. Дуговой стрелкой обозначена пара сил,
, блоки и нить считать невесомыми. Трением в шарнирах пренебречь. Дуговой стрелкой обозначена пара сил,  — модуль алгебраического момента.
— модуль алгебраического момента.
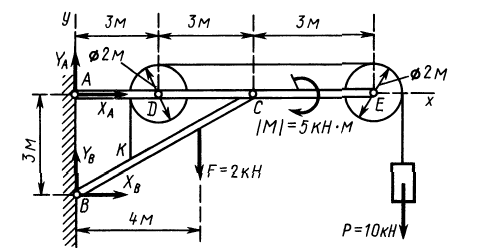
Рис. 52
Решение. Рассмотрим всю систему тел, освободив ее от связей, т.е. от цилиндрических шарниров в и . Неизвестные по величине и направлению силы реакций этих шарниров разложим на составляющие  предположив, что они направлены по положительному направлению осей координат. Неизвестных четыре, а условий равновесия сил для всей системы тел можно составить только три. Поэтому рассмотрим другие комбинации тел или отдельные тела.
предположив, что они направлены по положительному направлению осей координат. Неизвестных четыре, а условий равновесия сил для всей системы тел можно составить только три. Поэтому рассмотрим другие комбинации тел или отдельные тела.
Для определения  удобно составить условие равновесия для всей системы тел в форме суммы моментов сил относительно точки
удобно составить условие равновесия для всей системы тел в форме суммы моментов сил относительно точки  . Имеем
. Имеем

или

откуда  . Из приведенного уравнения
. Из приведенного уравнения  получилось со знаком плюс; следовательно, предположение о первоначальном направлении
получилось со знаком плюс; следовательно, предположение о первоначальном направлении  в положительную сторону оси
в положительную сторону оси  оказалось правильным.
оказалось правильным.
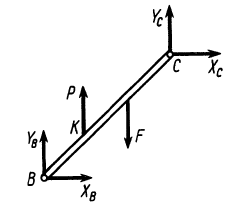
Рис. 53
Другие условия равновесия сил для всей системы тел не позволяют определить неизвестную  , так как в уравнения войдет неизвестная сила
, так как в уравнения войдет неизвестная сила  .
.
Рассмотрим отдельно равновесие стержня  (рис. 53), освободив его от связей. В шарнире
(рис. 53), освободив его от связей. В шарнире  неизвестную силу реакции заменим составляющими, направленными параллельно осям координат в положительную сторону. В точке
неизвестную силу реакции заменим составляющими, направленными параллельно осям координат в положительную сторону. В точке  приложим силу натяжения отброшенной нити, которая по величине равна силе тяжести груза
приложим силу натяжения отброшенной нити, которая по величине равна силе тяжести груза  и направлена по нити.
и направлена по нити.
Для определения  составим условие равновесия для сил, приложенных к стрежню
составим условие равновесия для сил, приложенных к стрежню  , в форме суммы моментов сил относительно точки
, в форме суммы моментов сил относительно точки  . В это условие не войдут неизвестные силы
. В это условие не войдут неизвестные силы  и
и  , которые определять не требуется. Имеем
, которые определять не требуется. Имеем

или
Отсюда находим  . Знак плюс у этой силы указывает на правильность предположения о направленности .
. Знак плюс у этой силы указывает на правильность предположения о направленности .
Для приобретения опыта силового анализа в системах тел рассмотрим дополнительно еще несколько вариантов частей системы тел и отдельных тел с приложенными к ним силами (рис. 54…57).
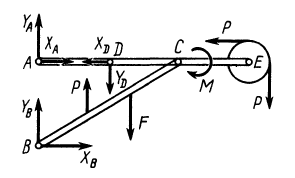
Рис. 54
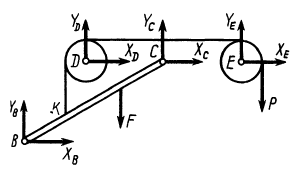
Рис. 55
Рис. 56
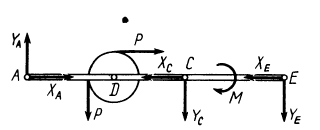
Рис. 57
При замене отбрасываемых тел силами учтено, что оси блоков  и
и  являются цилиндрическими шарнирами и реакции от них следует разлагать на составляющие, параллельные осям координат. Рассматривая силы, с которыми тела действуют друг на друга, следует учитывать, что, согласно аксиоме статики, силы действия и противодействия равны по величине, но противоположны по направлению. Так, если стержень действует на блок в точке с силами
являются цилиндрическими шарнирами и реакции от них следует разлагать на составляющие, параллельные осям координат. Рассматривая силы, с которыми тела действуют друг на друга, следует учитывать, что, согласно аксиоме статики, силы действия и противодействия равны по величине, но противоположны по направлению. Так, если стержень действует на блок в точке с силами  и
и  , направленными в положительные стороны осей координат (рис. 56), то блок будет действовать на стержень
, направленными в положительные стороны осей координат (рис. 56), то блок будет действовать на стержень  (рис. 57) с силами, равными по модулю, но направленными в противоположные стороны.
(рис. 57) с силами, равными по модулю, но направленными в противоположные стороны.
При отбрасывании нити следует учитывать, что ее натяжение во всех точках при отсутствии трения в осях блоков одинаково по величине и направлено по касательной к нити. Нить при этом должна испытывать только растяжение. При рассмотрении отдельного блока силы натяжения нитей следует приложить в двух точках, в которых отбрасываются части нити.
Теорема Вариньона
Из формулы, определяющей расстояние от центра приведения до линии действия равнодействующей,
(см. рис. 74) можно вывести уравнение, выражающее теорему Вариньона для произвольной плоской системы сил:
момент равнодействующей относительно любой точки равен алгебраической сумме моментов заданных сил относительно той же точки.
Теорема Вариньона находит широкое применение при решении задач по статике, в частности во всех тех задачах, где рассматривается равновесие рычага.
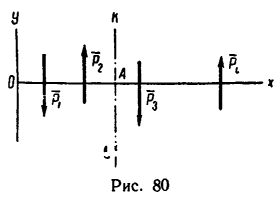
При помощи теоремы Вариньона очень просто определяется равнодействующая какого угодно числа параллельных сил 
 (рис. 80).
(рис. 80).
Известно, что модуль равнодействующей любой плоской системы сил равен модулю главного вектора:
Но если в данном случае расположить оси проекции так, как показано на рис. 80, одну ось — перпендикулярно к силам, а другую—параллельно им, то
Таким образом, модуль равнодействующей, параллельной системы сил равен абсолютному значению алгебраической суммы проекций сил на ось, параллельную этим силам.
Так как  =0, то вектор равнодействующей
=0, то вектор равнодействующей  направлен параллельно составляющим силам. Сторона, в какую направлен
направлен параллельно составляющим силам. Сторона, в какую направлен  R, определяется по знаку
R, определяется по знаку  Если у алгебраической суммы проекций получается знак «плюс», то равнодействующая направлена в сторону положительного направления оси; если получается знак «минус», то равнодействующая направлена противоположно положительному направлению оси.
Если у алгебраической суммы проекций получается знак «плюс», то равнодействующая направлена в сторону положительного направления оси; если получается знак «минус», то равнодействующая направлена противоположно положительному направлению оси.
Определив модуль и направление равнодействующей, по теореме Вариньона находим расстояние ОА, на котором расположена
KL- линия действия R от произвольно выбранного центра моментов О.
Задача 1.
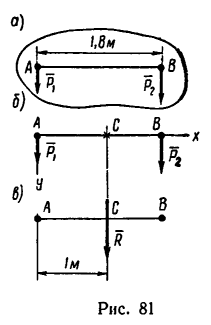
Определить равнодействующую двух параллельных сил  направленных в одну сторону (рис. 81, о), если
направленных в одну сторону (рис. 81, о), если 
Решение.
1. Примем за начало осей проекций точку А. Ось х расположим перпендикулярно к данным силам и направим ее вправо, а ось у направим вдоль силы  вниз (рис. 81,6).
вниз (рис. 81,6).
2. Найдем модуль равнодействующей:

Следовательно,
Так как сумма проекций положительна, то вектор равнодействующей направлен тоже вниз.
3. Приняв за центр моментов точку А, найдем расстояние АС от точки A до линии действия равнодействующей.
В данном случае

но

Таким образом, равнодействующая двух данных сил численно равна 27 н, и линия ее действия расположена от точки А на расстоянии АС = 1 м (рис. 81, в).
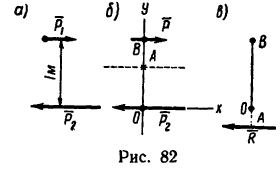
Задача 2.
Найти равнодействующую двух параллельных сил  направленных в разные стороны, если
направленных в разные стороны, если  = 12 кн и
= 12 кн и  = 60 кн (рис. 82, а).
= 60 кн (рис. 82, а).
Решение.
1. Расположим оси Ох и Оу так, как показано на рис. 82, б.
2. Найдем модуль равнодействующей:

Следовательно,
 .
.
Сумма проекций заданных сил имеет отрицательное значение. Следовательно, равнодействующая направлена влево (ось Ох направлена вправо).
3. Приняв за центр моментов точку О и предположив, что линия действия R пересекает отрезок ОВ в точке А, составим уравнение
Вариньона:
 .
.
Отсюда

Числовое значение О А получается отрицательным, значит этот отрезок от точки О необходимо отложить в противоположную сторону от ранее предполагаемого.
Равнодействующая заданных сил численно равна 48 и, направлена влево, и линия ее действия лежит ниже точки О на 0,25 м (рис. 82, в).
Задача 3.
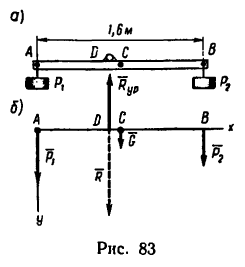
К концам прямолинейной однородной планки длиной 1,6 м и весом 5 н прикреплены два груза (рис. 83): слева —груз  = 20 н, справа —
= 20 н, справа —  = 15 н. В каком месте планки нужно приделать петельку, чтобы подвешенная на ней планка с грузами оставалась в горизонтальном положении?
= 15 н. В каком месте планки нужно приделать петельку, чтобы подвешенная на ней планка с грузами оставалась в горизонтальном положении?
Решение.
1. Изобразим на рис. 83 в горизонтальном положении планку АВ с грузами  Так как планка однородная, ее вес G —5 н приложен в середине (в точке С).
Так как планка однородная, ее вес G —5 н приложен в середине (в точке С).
Таким образом, к планке приложена система трех параллельных сил, действующих в одну сторону (рис. 83, б).
2. Оси проекций расположим, как показано на рис. 83, б.
3. Найдем модуль равнодействующей сил 

Равнодействующая направлена вертикально вниз.
4. Определим, на каком расстоянии AD от точки А (левого конца планки) расположена линия действия равнодействующей:

Линия равнодействующей проходит через точку D на расстоянии 0,7 м от левого конца планки.
В этом месте и необходимо прикрепить к планке петельку. Если теперь за петельку подвесить планку на гвоздь или прикрепить к нити, то планка будет находиться в равновесии, оставаясь горизонтальной, так как равнодействующая R уравновесится реакцией  гвоздя или нити.
гвоздя или нити.
Задача 4.
Балансир АВ, на который действуют пять горизонтально направленных параллельных сил (рис. 84), должен находиться в равновесии в вертикальном положении, будучи насаженным на горизонтальную ось.
Определить, где необходимо поместить ось балансира, пренебрегая его весом.
Решение.
1. Расположив оси проекций, как указано на рис. 84, найдем модуль равнодействующей системы параллельных сил:

Таким образом, равнодействующая направлена вправо.
2. Определим расстояние ВО от нижнего конца балансира до линии действия  из уравнения Вариньона (центр моментов в точке В):
из уравнения Вариньона (центр моментов в точке В):

Отсюда
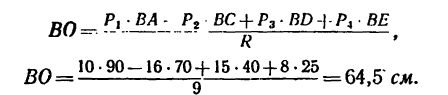
Следовательно, линия действия равнодействующей пересекает находящийся в вертикальном положении балансир на расстоянии 64,5 см от нижнего конца В. Здесь (в точке О) и нужно поместить ось балансира.
Следующую задачу рекомендуется решить самостоятельно.
Задача 5.
Где необходимо поместить ось балансира, описанного в предыдущей задаче, если силу  =15 кн направить в противоположную сторону?
=15 кн направить в противоположную сторону?
Ответ. ВО = 29,5 см.
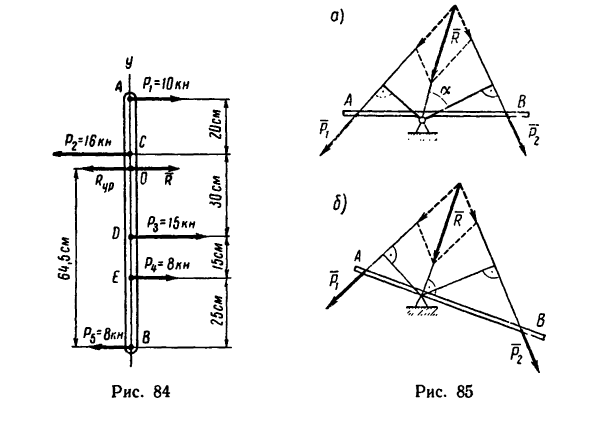
Задачи, приведенные ниже, решаются при помощи так называемого условия равновесия рычага, непосредственно вытекающего из теоремы Вариньона.
Рычагом можно назвать любое тело, поворачивающееся либо вокруг закрепленной оси, либо около линии контакта, образующейся при свободном направлении на другое тело.
Находясь под действием сил, рычаг уравновешен лишь в том случае, если линия действия равнодействующей пересекает ось или линию опоры. Причем если опорой рычага АВ служит закрепленная ось (неподвижный шарнир), то линия действия равнодействующей может быть направлена к рычагу под любым углом а (рис. 85, а). Если же рычаг АВ свободно опирается на идеально гладкую опору
(рис. 85, б), то линия действия равнодействующей должна быть перпендикулярна к опорной поверхности.
В любом нз этих случаев равновесие возникает потому, что система сил, действующих на рычаг, уравновешивается реакцией опоры  численно равной равнодействующей. А так как момент равнодействующей относительно опоры равен нулю, то из выражения теоремы Вариньона следует уравнение
численно равной равнодействующей. А так как момент равнодействующей относительно опоры равен нулю, то из выражения теоремы Вариньона следует уравнение
выражающее условие равновесия рычага.
Задача 6.
Масса неоднородного стержня составляет 4,5 кг. Для определения положения центра тяжести стержня его левый конец положен на гладкую опору, а правый зацеплен крюком динамометра (рис. 86, а). При горизонтальном положении стержня динамометр показывает усилие 1,8 кГ. Расстояние АВ —130 см от левой опоры до динамометра определено путем непосредственного измерения. Определить ^положение центра тяжести стержня.
Решение.
1. Рассмотрим стержень как рычаг с опорой в точке А. Кроме реакции опоры, на него действуют две нагрузки: вес G = 4,5 кГ (1 кг массы притягивается к земле силой, равной 1 кГ), приложенный в центре тяжести на искомом расстоянии х от опоры А, и усилие пружины динамометра Я = 1,8 кГ (рис. 86, б).
2. Составим уравнение равновесия рычага:
В данном случае относительно точки А моменты создают две силы  и G:
и G:

Следовательно,

Решаем полученное уравнение:

Центр тяжести стержня расположен на расстоянии 52 см от левой опоры.
Задача 7.
Какова должна быть масса однородной доски (рис. 87, а), чтобы, опираясь в точке В на гладкую опору, она с положенными на нее грузами  =100 кг и
=100 кг и  = 48 кг находилась в равновесии? Центр тяжести доски расположен в точке С.
= 48 кг находилась в равновесии? Центр тяжести доски расположен в точке С.
Решение.
1. Рассматривая доску как рычаг, видим, что на нее действуют гри нагрузки: вес левого груза  вес правого груза
вес правого груза
 и собственный вес доски
и собственный вес доски  (рис. 87, б).
(рис. 87, б).
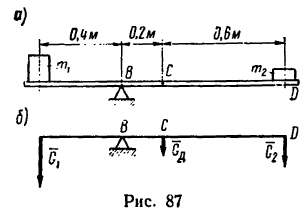
2. Для равновесия доски необходимо, чтобы алгебраическая сумма моментов этих сил относительно опоры В равнялась нулю. Следовательно,

3. Подставив вместо весов их выражения через массы и разделив обе части равенства на постоянную величину g (ускорение свободного падения 9,81  получим
получим

4. Отсюда находим массу доски:

Масса доски 8 кг.
Задача 8.
Предохранительная заслонка открывается в тот момент, когда давление в резервуаре превышает внешнее атмосферное на р=150  Заслонка прижимается к отверстию в резервуаре коленчатым рычагом АВС (рис. 88).
Заслонка прижимается к отверстию в резервуаре коленчатым рычагом АВС (рис. 88).
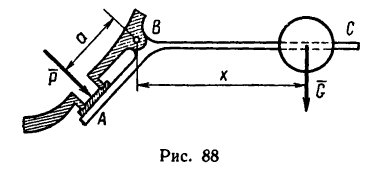
На каком расстоянии х от опоры рычага необходимо поместить груз весом G = 120 н, чтобы заслонка открылась при заданном давлении, если площадь отверстия в резервуаре  а =12 см. Весом рычага пренебречь.
а =12 см. Весом рычага пренебречь.
Ре ш е н и е.
1. На рычаг АВС предохранительного устройства действуют две нагрузки: вес груза G = 120 н и сила Р, открывающая заслонку:

2. Условие равновесия рычага выразится уравнением
3. Решая это уравнение, находим
Груз необходимо поместить на расстоянии 30 см от опоры В.
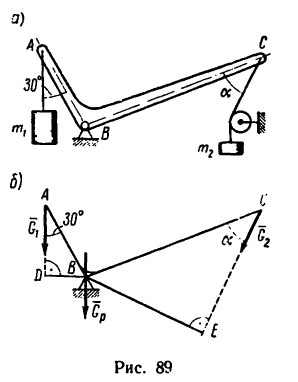
Задача 9.
На рис. 89, а изображен коленчатый рычаг АВС, к короткому колену которого при помощи нити прикреплен груз массой  = 50 кг, а к длинному — груз массой
= 50 кг, а к длинному — груз массой  = 10 кг.
= 10 кг.
Под каким углом а к длинному колену необходимо расположить вторую нить, чтобы нить, удерживающая первый груз, образовала с АВ угол 30°? Расстояния 
Считать, что при этом положении рычага линия действия собственного веса рычага  проходит через ось В опорного шарнира рычага.
проходит через ось В опорного шарнира рычага.
Решение.
1. На рис. 89, б изобразим расчетную схему рычага; к точке А отвесно приложен вес первого груза  к точке С под искомым углом а к СВ приложен вес второго груза
к точке С под искомым углом а к СВ приложен вес второго груза  Вес рычага приложен в точке В.
Вес рычага приложен в точке В.
2. Замечая, что  (так как плечо силы
(так как плечо силы  равно нулю), составим уравнение равновесия рычага:
равно нулю), составим уравнение равновесия рычага:

3. Выразив плечи BD и BE через длины колен рычага, а веса  и
и  — через массы, получим уравнение
— через массы, получим уравнение

из которого

Этому значению sin а соответствует прямой угол. Следовательно,
Поэтому нить, удерживающую второй груз, нужно расположить перпендикулярно к длинному колену рычага.
Следующую задачу рекомендуется решить самостоятельно.
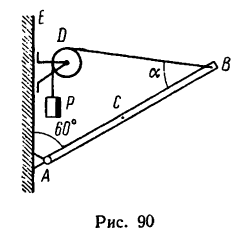
 . Однородный стержень АВ длиной 2 м и весом 100 н прикреплен шарниром А к вертикальной стене АЕ (рис. 90). Под каким углом а к стержню должна быть направлена веревка с грузом Р = 50 н на конце, перекинутая через блок D, чтобы стержень находился в равновесии, образуя со стеной угол
. Однородный стержень АВ длиной 2 м и весом 100 н прикреплен шарниром А к вертикальной стене АЕ (рис. 90). Под каким углом а к стержню должна быть направлена веревка с грузом Р = 50 н на конце, перекинутая через блок D, чтобы стержень находился в равновесии, образуя со стеной угол  Трением на блоке пренебречь. Ответ, а —60 или 120°.
Трением на блоке пренебречь. Ответ, а —60 или 120°.
Равновесие произвольной плоской системы сил
Задача на равновесие произвольной плоской системы сил решается по той же общей схеме, которая приведена в § 8-2. Придерживаясь этой схемы, необходимо учитывать следующее.
Как известно, любую плоскую систему сил можно привести к главному вектору  и главному моменту
и главному моменту  (Е. М. Никитин, § 26).
(Е. М. Никитин, § 26).
Если же система сил уравновешена (тело, находящееся под действием такой системы сил, либо неподвижно, либо равномерно вращается около неподвижной оси, либо находится в равномерном и прямолинейном поступательном движении), то (Е. М. Никитин, § 30). Эти равенства выражают два необходимых и достаточных условия равновесия любой системы сил.
(Е. М. Никитин, § 30). Эти равенства выражают два необходимых и достаточных условия равновесия любой системы сил.
Для произвольной плоской системы сил из этих двух условий непосредственно получаем три уравнения равновесия:
Первое и второе выражения — уравнения проекций — образуются из условия третье выражение — уравнение моментов — из условия
третье выражение — уравнение моментов — из условия 
Если на тело действует система параллельных сил, то уравнений равновесия получится только два: уравнение проекций на ось, параллельную силам, и уравнение моментов

При решении некоторых задач одно или оба уравнения проекций целесообразно заменить уравнениями моментов относительно каких-либо точек, т. е. систему уравнений равновесия можно представить в таком виде:
или
В первом случае линия, проходящая через точки А и В, не перпендикулярна к оси х. Во втором случае центры моментов А, В и С не лежат на одной прямой линии.
Для системы параллельных сил соответственно получаем два уравнения моментов:

В этом случае точки А и В не лежат на прямой, параллельной силам.
В задачах, решаемых при помощи уравнений равновесия, обычно рассматриваются тела, находящиеся в состоянии покоя, тогда система сил, действующих на это тело, уравновешена.
Силы, действующие на тело, делятся на две группы. Одна группа сил называется нагрузками (активные силы), вторая группа сил называется реакциями связей (пассивные силы).
Нагрузки, как правило, бывают заданы. Они имеют числовое значение, точку приложения к телу и направление их действия.
В рассматриваемых ниже задачах используются лишь три разновидности нагрузок: сосредоточенные силы, равномерно распределенные силы * и пары сил (статические моменты) **.
Сосредоточенными называются силы, приложенные к точке тела. Если, например, на тело действуют нагрузки 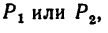 как пока-
как пока-
заново на рис. 91, а, действия этих нагрузок можно считать приложенными соответственно к точкам А или В тела и на расчетных схемах изобразить так, как это выполнено на рис. 91, б.
Равномерно распределенные нагрузки, например кирпичная кладка (рис. 92, а), или собственный вес однородного тела (бруса, балки) постоянного поперечного сечения по всей его длине задается при помощи двух параметров —интенсивности q и длины l на протяжении которой они действуют. На расчетных схемах эти нагрузки изображаются так, как показано на рис. 92, б.
* К распределенным нагрузкам относятся также неравномерно распределенные нагрузки, но в настоящем пособии они не рассматриваются.
** Здесь не рассматриваются случаи, когда пары сил действуют на некотором расстоянии непрерывной цепочкой моментов (распределенные моменты).
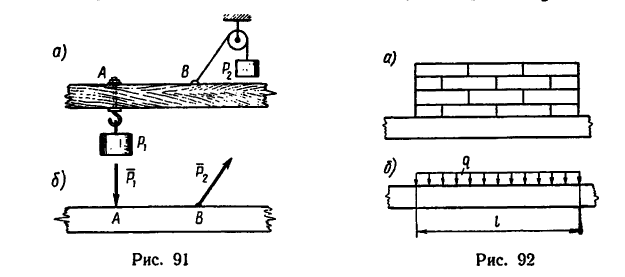
Пара сил (сосредоточенный момент), например, может быть образована двумя одинаковыми грузами Р, действующими на тело так, как показано на рис. 93, а. Условное изображение пары сил, действующей на тело, показано на рис. 93, б.
Очень часто в каком-либо месте тела возникает совместное действие сосредоточенной силы и момента. Пусть, например, груз Q подвешен на конце бруса, жестко заделанного другим концом
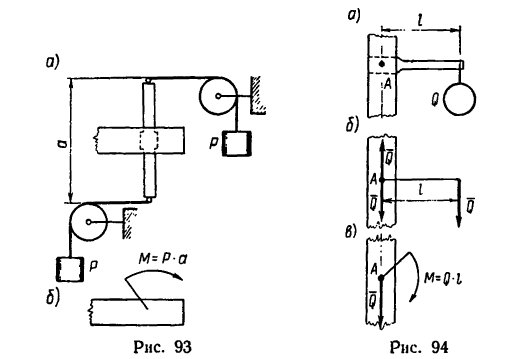
в каком-либо теле (рис. 94, а). Если перенести действие силы в точку А тела (рис. 94, б), то получим в ней совместное действие сосредоточенной силы и момента.
Как правило, в задачах по статике реакции связей —искомые величины. Для каждой искомой реакции связи обычно необходимо
знать ее направление и числовое значение (модуль).
Направления реакций идеальных связей — связей без трения — определяют в зависимости от вида связи по следующим правилам.
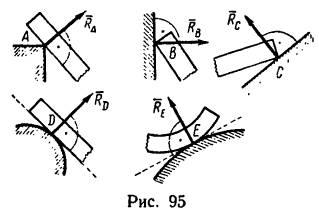
1. При свободном опирании тела на связь реакция связи направлена от связи к телу перпендикулярно либо к поверхности тела  либо к поверхности связи
либо к поверхности связи рис. 95), либо к общей касательной обеих поверхностей
рис. 95), либо к общей касательной обеих поверхностей  рис. 95).
рис. 95).
Во всех этих случаях связь препятствует движению тела в одном направлении —перпендикулярном к опорной поверхности.
2. Если связями являются нити, цепи, тросы (гибкая связь), то они препятствуют движению тела только будучи натянутыми.
Поэтому реакции нитей, цепей, тросов всегда направлены вдоль их самих в сторону от тела к связи ( рис. 96).
рис. 96).
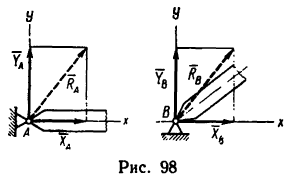
3. Если связь тела с какой-либо опорной поверхностью осуществляется при помощи подвижного шарнира (рис. 97), то его реакция направлена перпендикулярно к опорной поверхности. Таким
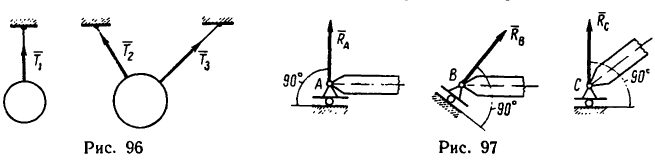
образом, подвижный шарнир (т. е. шарнир, ось которого может передвигаться вдоль опорной поверхности) представляет собой конструктивный вариант свободного опирания.
4. Если соединение тела со связью осуществляется при помощи неподвижного шарнира (рис. 98), то определить непосредственно направление реакции нельзя, за исключением тех частных случаев, которые описаны ниже.
Шарнирное соединение препятствует поступательному перемещению тела во всех направлениях в плоскости, перпендикулярной к оси шарнира. Направление реакции неподвижного шарнира может быть любым в зависимости от направления действия остальных сил. Потому сначала определяют две взаимно перпендикулярные составляющие реакции шарнира, а затем, если нужно, по правилу параллелограмма или треугольника можно определить как модуль, так и направление полной реакции
реакции шарнира, а затем, если нужно, по правилу параллелограмма или треугольника можно определить как модуль, так и направление полной реакции 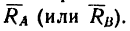
Направление реакции неподвижного шарнира непосредственно определяют в двух следующих случаях:
- а) если, кроме реакции шарнира, все остальные силы (нагрузки и реакция другой связи) образуют систему параллельных сил, то реакция неподвижного шарнира также параллельна всем силам;
- б) если, кроме реакции шарнира, на тело действуют еще только две непараллельные силы, то линия действия реакции неподвижного шарнира проходит через ось шарнира и точку пересечения двух других сил (задачи 47-9 и 48-9).
5. Движение тела может быть ограничено жесткой заделкой в какой-либо опоре (рис. 99). В этом случае даже одна жесткая заделка обеспечивает равновесие тела при любых нагрузках.
ее реакции заранее определить нельзя и сначала определяют составляющие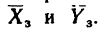 Кроме того, жесткая заделка препятствует повороту тела в плоскости действия сил, поэтому, кроме силы реакции, на тело действует еще момент заделки
Кроме того, жесткая заделка препятствует повороту тела в плоскости действия сил, поэтому, кроме силы реакции, на тело действует еще момент заделки  уравновешивающий стремление нагрузок повернуть тело (вывернуть тело из заделки).
уравновешивающий стремление нагрузок повернуть тело (вывернуть тело из заделки).
Таким образом, если опорой тела является жесткая заделка, то со стороны последней на тело действуют реакция заделки, которую можно заменить двумя взаимно перпендикулярными составляющими, и момент заделки.
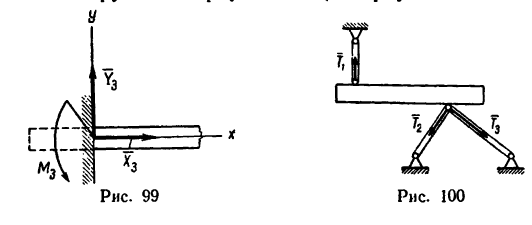
6. Иногда тело удерживается в равновесии при помощи жестких стержней, шарнирно соединенных с телом и с опорами (рис. 100). В отличие от гибкой связи (см. п. 2) такие стержни могут испытывать не только растяжение, но и сжатие.
Возможны и такие случаи, когда нельзя заранее установить, какие стержни растянуты, а какие сжаты. Поэтому при составлении уравнений равновесия исходят из того, что все стержни растянуты. Если же некоторые стержни окажутся в действительности сжатыми, то в результате решения числовые значения реакций таких стержней получатся отрицательными.
Задача 10.
На горизонтальную балку АВ, левый конец которой имеет шарнирно-неподвижную опору, а правый —шарнирноподвижную, в точках С и D поставлены два груза:  (рис. 101, а). Определить реакции опор балки.
(рис. 101, а). Определить реакции опор балки.
Решение.
1. Рассмотрим равновесие балки АВ, на которую в точках С и D действуют две вертикальные нагрузки  (рис. 101, б).
(рис. 101, б).
2. Освободив правый конец балки от связи и заменив ее действие реакцией  направленной перпендикулярно к опорной поверхности, увидим, что на балку действует система параллельных сил. Поэтому, если освободить и левый конец балки от шарнирно неподвижной опоры, то се реакция будет также направлена вертикально (рис. 101, б).
направленной перпендикулярно к опорной поверхности, увидим, что на балку действует система параллельных сил. Поэтому, если освободить и левый конец балки от шарнирно неподвижной опоры, то се реакция будет также направлена вертикально (рис. 101, б).
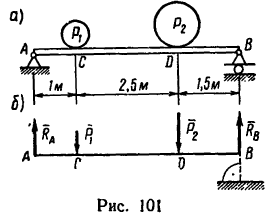
3. Составим систему уравнений равновесия вида (5), приняв для одного уравнения за центр моментов точку А, а для другого — точку В;

4. Решая уравнения, из (I) находим

5. Проверим правильность решения, составив уравнение проекций сил на вертикальную ось у:

Подставляя в это уравнение числовые значения, получаем тождество
14 — 10 — 20+16=0 или 0 =0
Значит задача решена правильно.
Реакции опор:

При решении задач рекомендуется не пренебрегать проверкой. От правильности определения реакций опор зависит правильность всего остального решения или расчета.
Задача 11.
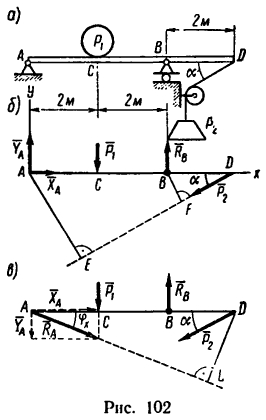
На консольную балку, имеющую в точке А шарнирно-неподвижную, а в точке В шарнирно-подвижную опору, действуют две сосредоточенные нагрузки:  50 кн, как показано на рис. 102, а; угол а=40°. Определить реакции опор балки.
50 кн, как показано на рис. 102, а; угол а=40°. Определить реакции опор балки.
Решение.
1. Рассматривая находящуюся в равновесии балку AD, видим, что в точке С на нее действует вертикально вниз нагрузка  а в точке D под углом ос к АВ действует другая нагрузка
а в точке D под углом ос к АВ действует другая нагрузка  (рис. 102, б).
(рис. 102, б).
2. Освобождаем балку от связен и заменим их действие реакциями. В месте шарнирно-подвижной опоры В возникает вертикальная реакция  Направление реакции шарнирно-неподвижной опоры в данном случае непосредственно определить нельзя, поэтому заменим эту реакцию ее двумя составляющими
Направление реакции шарнирно-неподвижной опоры в данном случае непосредственно определить нельзя, поэтому заменим эту реакцию ее двумя составляющими
3. Для полученной системы из пяти сил, произвольно расположенных в плоскости, составим систему уравнений равновесия вида (3), расположив ось х вдоль балки, а за центры моментов приняв точки А и В:

4. Решаем полученные уравнения.
Из (1)
ХА = Р2 cos а = 50 cos 40° = 38,3 кн.
Так как
то из (2)

Замечая, что
из (3) получаем

Знак минус, получившийся в последнем случае, показывает, что  — вертикальная составляющая реакция неподвижного шарнира— направлена вниз, а не вверх, как предполагалось перед составлением уравнения (3).
— вертикальная составляющая реакция неподвижного шарнира— направлена вниз, а не вверх, как предполагалось перед составлением уравнения (3).
5. При необходимости реакцию  шарнира А легко определить (рис. 102, в).
шарнира А легко определить (рис. 102, в).
Модуль реакции шарнира А найдем из формулы 
Направление реакции Ra установим, определив угол
откуда
6. Проверим правильность решения задачи. Так как при решении не использовано уравнение проекций на ось у, то используем его для проверки:

Уравнение составлено по рис. 102, б.
После подстановки в это уравнение известных значений получим:

В данном случае, проверка решения при помощи уравнения проекций не дает возможности установить правильность определения полной реакции шарнира А. Чтобы проверить и этот этап решения, составим уравнение моментов относительно точки D, воспользовавшись рис. 102, в, на котором изображена реакция так, как она направлена в действительности:
шарнира А. Чтобы проверить и этот этап решения, составим уравнение моментов относительно точки D, воспользовавшись рис. 102, в, на котором изображена реакция так, как она направлена в действительности:

Подставляем в это уравнение числовые значения, имея в виду, что

Расхождение в результатах, равное 0,3, получается из-за округлений при вычислениях.
В следующих задачах проверка решения не приводится и ее рекомендуется производить самостоятельно.
Задача 12.
Горизонтальная балка имеет в точке А шарнирноподвижную опору, плоскость которой наклонена к горизонту под углом а=25° (рис. 103, а), а в точке В — шарнирно-неподвижную опору. Балка нагружена в точках С и D двумя сосредоточенными силами  = 24 кн и
= 24 кн и  = 30 н.
= 30 н.
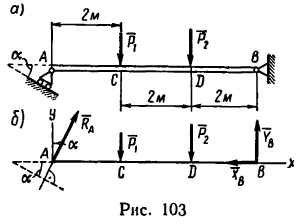
Определить реакции опор.
Решение.
1. Так же как и в задаче 75-14, балка нагружена двумя параллельными силами, но в отличие от этой задачи здесь реакция подвижного шарнира  направлена не параллельно вертикальным нагрузкам, а под углом а к вертикали — перпендикулярно к опорной поверхности шарнира (рис. 103,6). Поэтому реакция неподвижного шарнира не будет направлена вертикально и, так же как в задаче 76-14, ее целесообразно заменить двумя составляющими
направлена не параллельно вертикальным нагрузкам, а под углом а к вертикали — перпендикулярно к опорной поверхности шарнира (рис. 103,6). Поэтому реакция неподвижного шарнира не будет направлена вертикально и, так же как в задаче 76-14, ее целесообразно заменить двумя составляющими 
2. Расположив оси х и у как показано на рис. 103, б, составляем уравнения равновесия вида (1):

3. Решаем полученные уравнения. Из уравнения (3) находим 

Из уравнения (2) находим

Из уравнения (1) находим 

Таким образом, реакция шарнира А
а составляющие реакции шарнира В
и
4. Проверку решения производим при помощи уравнения моментов относительно точки С или D.
Следующую задачу рекомендуется решить самостоятельно.
Задача 13.
На консольную балку, имеющую в точке А шарнирно-неподвижную, а в точке В шарнирно-подвижную опору,
действуют две нагрузки (рис. 104, а): в точке D — сосредоточенная нагрузка Р=8 кн, а на участке СВ — равномерно распределенная нагрузка интенсивностью q — 2 кн/м. Определить реакции опор.
Решение.
1. В этой задаче, кроме сосредоточенной силы Р, на участке СВ действует равномерно распределенная сила, интенсивность которой q. Полная величина этой нагрузки (ее равнодействующая) равна q-CB и приложена в точке О посредине участка СВ (рис. 104, б), т. е.
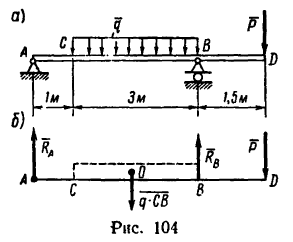
2. Так же как в задаче 75-14, реакция  подвижного шарнира направлена вертикально (перпендикулярно к опорной поверхности). Следовательно, и реакция
подвижного шарнира направлена вертикально (перпендикулярно к опорной поверхности). Следовательно, и реакция  неподвижного шарнира направлена вертикально. Таким образом, на балку действует система параллельных сил (см. рис. 104, б).
неподвижного шарнира направлена вертикально. Таким образом, на балку действует система параллельных сил (см. рис. 104, б).
3. Составим два уравнения моментов относительно точек В и А:

4. Из уравнения (1)

Отрицательное значение реакции  означает, что она направлена вниз, а не вверх, как показано на рис. 104, б, потому что момент силы Р относительно опоры В больше, чем момент равномерно распределенной нагрузки.
означает, что она направлена вниз, а не вверх, как показано на рис. 104, б, потому что момент силы Р относительно опоры В больше, чем момент равномерно распределенной нагрузки.
Из уравнения (2) находим 

Таким образом, реакция шарнира А равна  0,75 кн и направлена вертикально вниз; реакция шарнира В составляет
0,75 кн и направлена вертикально вниз; реакция шарнира В составляет  = 14,25 кн и направлена вертикально вверх.
= 14,25 кн и направлена вертикально вверх.
5. Для проверки решения можно использовать уравнение проекций на вертикальную ось.
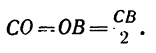
Задача 14.
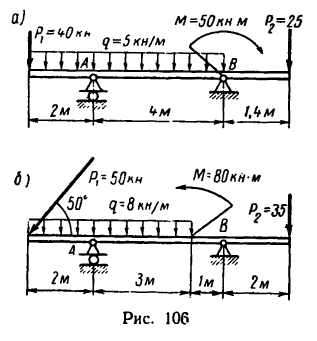
На двухконсольную балку с шарнирно-неподвижной опорой в точке Лис шарнирно-подвижной в точке В действуют, как показано на рис. 105,а, сосредоточенная сила Р—10 кн, сосредоточенный момент (пара сил)
М = 40 кн м и равномерно распределенная нагрузка интенсивностью q — 0,8 кн/м. Определить реакции опор.
Решение.
1. В отличие от предыдущей задачи здесь, кроме сосредоточенной силы и равномерно распределенной нагрузки, равнодействующая  которой приложена в точке О посредине участка
которой приложена в точке О посредине участка  на балку действует
на балку действует
момент М, направленный по часовой стрелке (рис. 105, б).
2. После освобождения балки от связей и замены связей их реакциями  получаем уравновешенную систему, составленную из четырех параллельных сил и одной пары сил (момента).
получаем уравновешенную систему, составленную из четырех параллельных сил и одной пары сил (момента).
* Перед тем как приступить к рассмотрению этой и следующих задач, необходимо вспомнить два важных свойства нары сил.
3. Составим два уравнения моментов относительно точек В и А:

4. Решая эти уравнения, находим, что
Следующую задачу рекомендуется решить самостоятельно.
Задача 15.
Жестко заделанная у левого конца консольная балка АВ (рис. 107, а) нагружена равномерно распределенной
нагрузкой интенсивностью q  5
5  сосредоточенной силой P= 12
сосредоточенной силой P= 12  моментом М = = 20 кн м. Определить реакции заделки.
моментом М = = 20 кн м. Определить реакции заделки.
Решение.
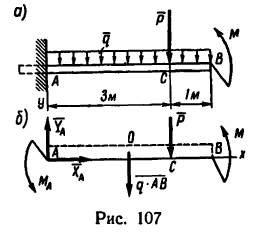
1. На балку действуют три нагрузки: в точке С—вертикальная сосредоточенная сила Р, по всей длине балки — равномерно распределенная нагрузка, которую заменим сосредоточенной силой
 приложенной в точке
приложенной в точке  Правый
Правый
конец балки нагружен моментом М, действующим против хода часовой стрелки (рис. 107, б).
2. Равновесие балки обеспечивается жесткой заделкой у точки А. Освободив балку от связи, заменим ее действие силой — реакцией связи  и реактивным моментом
и реактивным моментом  Но так как реакцию
Но так как реакцию  заделки сразу определить нельзя (по тем же причинам, что и направление реакции неподвижного шарнира), заменим
заделки сразу определить нельзя (по тем же причинам, что и направление реакции неподвижного шарнира), заменим  ее составляющими
ее составляющими  совместив их с осями х и у (см. рис. 107, б).
совместив их с осями х и у (см. рис. 107, б).
3. Составим уравнения равновесия —уравнение проекции на оси х и у и уравнение моментов относительно точки А:

4. Из уравнения (1)

а это означает, что горизонтальная составляющая реакции заделки  равна нулю, так как в данном случае нет усилий, смещающих балку АВ в горизонтальном направлении.
равна нулю, так как в данном случае нет усилий, смещающих балку АВ в горизонтальном направлении.
Из уравнения (2)

Выше найдено, что  значит реакция заделки
значит реакция заделки  перпендикулярна к оси х. Следовательно,
перпендикулярна к оси х. Следовательно,

Из уравнения (3)

Таким образом,

5. Проверку правильности решения можно произвести при помощи уравнения моментов относительно точки С или В. В любое из них входят обе найденные величины.
Следующую задачу рекомендуется решить самостоятельно.
- Заказать решение задач по теоретической механике
Задача 16.
Однородный брус длиной AB = 5 м и весом G = 400 н концом А упирается в гладкий горизонтальный пол и в гладкий вертикальный выступ, а в точке D— в ребро вертикальной стенки высотой ED=4 м. В этом положении брус образует с вертикальной плоскостью стенки угол a = 35° (рис. 109, а). Определить реакции опор.
Решение.
1. В отличие от предыдущих задач здесь нет ни шарнирных опор, ни жесткой заделки. Брус свободно опирается о пол, выступ и ребро стенки. Нагрузкой является только вес бруса, приложенный по его середине, так как брус однороден.
2. Освободив брус от связей, изобразим его вместе со всеми действующими на него силами (рис. 109, б): в точке С на брус действует
его вес  Пренебрегая поперечными размерами бруса, можно считать, что в точке А на брус действуют дв^ реакции:
Пренебрегая поперечными размерами бруса, можно считать, что в точке А на брус действуют дв^ реакции:  — вертикальная реакция пола и
— вертикальная реакция пола и  — горизонтальная реакция выступа; в точке D к брусу приложена
— горизонтальная реакция выступа; в точке D к брусу приложена  реакция стенки. В данном случае брус свободно опирается о связи, поэтому реакция связей перпендикулярна к опорным поверхностям.
реакция стенки. В данном случае брус свободно опирается о связи, поэтому реакция связей перпендикулярна к опорным поверхностям.
3. Таким образом, на брус действуют четыре силы: Расположив оси проекций как показано на рис. 109, б и приняв за центр моментов точку А, составим уравнения равновесия:
Расположив оси проекций как показано на рис. 109, б и приняв за центр моментов точку А, составим уравнения равновесия:

4. Решаем полученную систему уравнений.
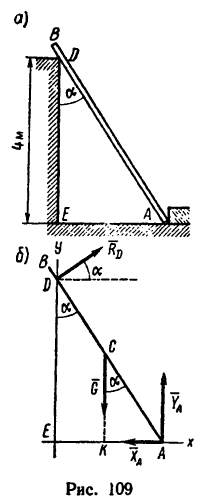
Предварительно определяем АК и AD. Из рис. 109, б находим, что

И теперь из уравнения (3):

Из уравнения (1)
 .
.
Из уравнения (2)

Следовательно,

5. Проверку можно произвести при помощи уравнения моментов относительно точки С.
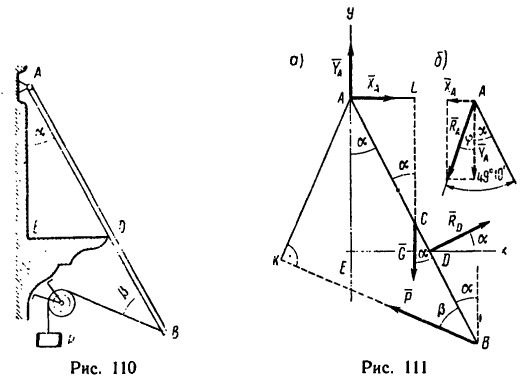
Задача 17.
Однородный брус АВ длиной 5 л и весом G = 180 и, прикрепленный к вертикальной стене шарниром А, опирается в точке D на выступ, ширина которого =1,5 м; при этом брус образует с вертикалью угол а=30°. К концу В бруса прикреплена нить, перекинутая через блок и несущая на другом конце груз Р = 360 н (рис. 110); угол
=1,5 м; при этом брус образует с вертикалью угол а=30°. К концу В бруса прикреплена нить, перекинутая через блок и несущая на другом конце груз Р = 360 н (рис. 110); угол  = 40°. Определить реакцию выступа ED и полную реакцию шарнира А.
= 40°. Определить реакцию выступа ED и полную реакцию шарнира А.
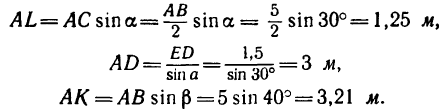
Решение I.
1. К брусу АВ приложены две нагрузки—его собственный вес G в середине бруса (так как брус однородный), действующий вертикальную вниз, и к нижнему концу —сила  , направленная под углом
, направленная под углом  к В А. Изобразим брус вместе с этими силами отдельно на рис. 111, а.
к В А. Изобразим брус вместе с этими силами отдельно на рис. 111, а.
2. Брус, имеет две опоры. В точке D он свободно опирается на ребро выступа ED, и поэтому реакция выступа  направлена перпендикулярно к брусу АВ. В точке А брус имеет шарнирнонеподвижную опору, направление реакции
направлена перпендикулярно к брусу АВ. В точке А брус имеет шарнирнонеподвижную опору, направление реакции  которой неизвестно. Заменим искомую реакцию двумя составляющими
которой неизвестно. Заменим искомую реакцию двумя составляющими  , допустив, что первая направлена горизонтально, а вторая — вертикально (см. рис. 111,о).
, допустив, что первая направлена горизонтально, а вторая — вертикально (см. рис. 111,о).
Таким образом, на брус АВ действует уравновешенная система пяти сил 
3. Поместив начало осей координат в точке Е и расположив их в соответствии с выбранным направлением сил  горизонтально и вертикально, составим уравнения равновесия:
горизонтально и вертикально, составим уравнения равновесия:

4. Находим плечи AL, AD и АК
Теперь решаем полученные уравнения.
Из уравнения (3)
Из уравнения (I)

Из уравнения (2)

5. Знаки «минус» у числовых значений составляющих реакции шарнира А показывают, что составляющая  направлена по горизонтали влево, а
направлена по горизонтали влево, а  — по вертикали вниз, как это показано на рис. 111,6:
— по вертикали вниз, как это показано на рис. 111,6:
6. Находим модуль полной реакции  шарнира Л и ее направление (угол
шарнира Л и ее направление (угол  на рис. 111,6):
на рис. 111,6):

Из рис. 111,6 видно, что реакция шарнира А образует с брусом АВ угол ( ) = 49°10′.
) = 49°10′.
Таким образом, реакция выступа перпендикулярна к брусу и равна  н реакция шарнира направлена к брусу под углом 49°10′ и равна
н реакция шарнира направлена к брусу под углом 49°10′ и равна 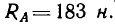
Решение 2.
Так как направление и числовое значение полной реакции шарнирно-неподвижной опоры не зависят от первоначально предполагаемого выбора направления составляющих  , то при решении подобных задач можно расположить их как угодно.
, то при решении подобных задач можно расположить их как угодно.
1. Можно, например, предположить, что одна из составляющих реакции шарнира направлена вдоль бруса АВ, а вторая — перпендикулярно к нему.
2. Изобразим при таком предположении силы, приложенные к брусу, на рис. 112, а. Расположим оси х и у как показано на том же рисунке и составим уравнения равновесия, приняв за центр моментов [для уравнения  точку D:
точку D:

3. Найдем плечи:

Теперь решим уравнения.
Из уравнения (1)

Из уравнения (3)

Из уравнения (2)

4. Как видно, реакция  имеет такое же значение, что и в первом решении. Составляющие реакции
имеет такое же значение, что и в первом решении. Составляющие реакции  направлены так, как показано на рис. 112, б. Используя этот рисунок, найдем модуль и направление (угол
направлены так, как показано на рис. 112, б. Используя этот рисунок, найдем модуль и направление (угол
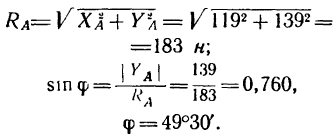
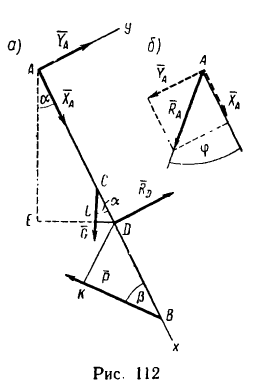
Как видно, результаты получаются те же; небольшое расхождение (0,7%) в значении угла, определяющем направление реакции  относительно бруса АВ, объясняется приближенностью вычислений.
относительно бруса АВ, объясняется приближенностью вычислений.
Задача 18.
Балка АВ, нагруженная как показано на рис. 114, а, удерживается в равновесии стержнями 1, 2 и 3, имеющими по
концам шарнирные крепления. Определить реакции стержней.
При этом 


Решение 1.
1. На балку АВ действуют три нагрузки: в точке А— сосредоточенная сила  и момент М, а на участке СВ = 6 м —равномерно
и момент М, а на участке СВ = 6 м —равномерно
распределенная нагрузка интенсивностью  которую заменим равнодействующей
которую заменим равнодействующей  приложенной в точке О — посредине участка СВ. Следовательно (рис. 114,6),
приложенной в точке О — посредине участка СВ. Следовательно (рис. 114,6),
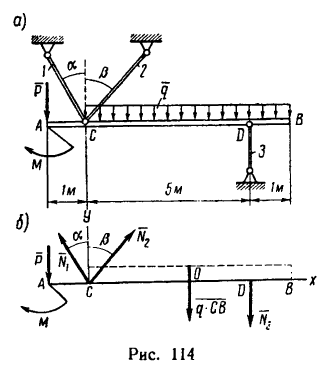
2. Так как прямолинейные стержни при шарнирных креплениях могут только растягиваться или сжиматься, то реакции стержней направлены вдоль них. Предположим, что все стержни растянуты. Заменим их (см. рис. 114,6) реакциями 
3. Составим, как обычно, три уравнения равновесия:

4. Из уравнения (3)

Знак «минус» указывает, на то, что стержень 3 сжат и реакция направлена вверх.
Из уравнения (1) выразим 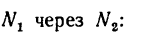

Подставим полученное значение  в уравнение (2) и найдем из него
в уравнение (2) и найдем из него  .
.

И теперь из (4)

Таким образом, стержни 1 и 2 растянуты и их реакции  стержень 3 сжат, его реакция
стержень 3 сжат, его реакция 
Рассмотренное решение неудобно тем, что оно требует подстановки в одно из уравнений неизвестного из другого уравнения.
Если из числа трех опорных стержней два имеют общий шарнир, то задачу можно решить иначе. Сначала определить реакцию общего шарнира, а затем, используя правило треугольника, найти реакции сходящихся у шарнира стержней.
В рассмотренной задаче обе нагрузки действуют вертикально, а момент только стремится повернуть балку; значит нет усилий, смещающих балку в горизонтальном направлении. Поэтому аналогично тому, как указывалось в задачах 4, нагрузки могут быть уравновешены двумя реакциями, перпендикулярными к балке. А так как реакция стержня 3 перпендикулярна к балке, то и равнодействующая реакций 1 и 2 перпендикулярна к ней. На этом и основывается следующее решение.
Решение 2.
1. В отличие от первого решения реакции стержней 1 и 2 заменим их равнодействующей  Тогда расчетная схема примет вид, показанный на рис. 115, а (штриховыми линиями
Тогда расчетная схема примет вид, показанный на рис. 115, а (штриховыми линиями  показаны положения стержней 1 и 2).
показаны положения стержней 1 и 2).
2. Составим два уравнения моментов, приняв за центры моментов точки С и D:


3. Уравнение (1) аналогично уравнению (3) в первом решении. Решая уравнение (1), найдем, что
Из уравнения (2)

Таким образом, вертикальная равнодействующая реакций  и
и  двух первых стержней равна 134 кн.
двух первых стержней равна 134 кн.
4. Применив правило треугольника, разложим силу  на составляющи
на составляющи (рис. 115,6), направления которых известны (реакции
(рис. 115,6), направления которых известны (реакции  направлены вдоль стержней
направлены вдоль стержней  ).
).
На векторе  как на стороне построим треугольник abc, стороны ас и сb которого, изображающие искомые реакции стержней, соответственно параллельны стержням
как на стороне построим треугольник abc, стороны ас и сb которого, изображающие искомые реакции стержней, соответственно параллельны стержням 
5. На основе теоремы синусов
так как

Отсюда
Следующую задачу рекомендуется решить самостоятельно.
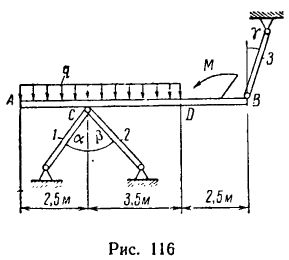
Справочный материал по статике
В статике изучается равновесие тел под действием сил и свойства систем сил, необязательно находящихся в равновесии.
Задачи статики можно условно разделить на три типа: задачи на равновесие системы сходящихся сил, т.е. сил, линии действия которых пересекаются в одной точке, задачи произвольной плоской системы сил и задачи пространственной системы сил.
Нахождение координат центра тяжести тоже считается задачей статики. Хотя силы в этой задаче явно не присутствуют, основные формулы задачи следуют из уравнений равновесия системы параллельных сил.
Искомыми величинами в задачах статики могут быть реакции опор, усилия в элементах конструкций, геометрические (размеры, углы) и материальные (вес, коэффициент трения) характеристики систем. В статически определимых задачах число уравнений равновесия совпадает с числом неизвестных. Именно такие задачи и будут рассмотрены в этой части.
Для решения задач статики потребуются понятия проекции силы на ось и момента силы относительно точки и оси. Напомним, что проекция вектора силы  на ось х определяется по формуле
на ось х определяется по формуле 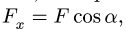 где а — угол между положительным направлением оси и вектором силы, отсчитываемый против часовой стрелки. Если угол острый, то проекция положительная, если тупой — отрицательная.
где а — угол между положительным направлением оси и вектором силы, отсчитываемый против часовой стрелки. Если угол острый, то проекция положительная, если тупой — отрицательная.
Общее определение момента  силы
силы  относительно точки О дается векторным произведением
относительно точки О дается векторным произведением

где  — радиус-вектор точки приложения вектора силы относительно точки О. Модуль момента вычисляем по формуле
— радиус-вектор точки приложения вектора силы относительно точки О. Модуль момента вычисляем по формуле 
где  — угол между векторами
— угол между векторами  Направление вектора момента вычисляется по правилу векторного произведения. Плечо
Направление вектора момента вычисляется по правилу векторного произведения. Плечо  силы относительно точки О — это кратчайшее расстояние от точки до линии действия силы;
силы относительно точки О — это кратчайшее расстояние от точки до линии действия силы; 
Вектор момента перпендикулярен плоскости, в которой располагаются силы. Поэтому в задачах статики плоской системы сил момент можно рассматривать как скалярную величину — величину проекции вектора момента на нормаль к плоскости (ось  ). Индекс
). Индекс  для сокращения записи часто опускают и отождествляют момент силы
для сокращения записи часто опускают и отождествляют момент силы  относительно точки на плоскости со скалярной величиной —
относительно точки на плоскости со скалярной величиной —  Отсюда вытекает практическое правило определения момента силы относительно точки в плоских задачах статики. Для вычисления момента силы относительно точки О (рис. 1) сначала находим проекции силы на оси, а затем момент вычисляем по формуле
Отсюда вытекает практическое правило определения момента силы относительно точки в плоских задачах статики. Для вычисления момента силы относительно точки О (рис. 1) сначала находим проекции силы на оси, а затем момент вычисляем по формуле  Другой способ вычисления момента:
Другой способ вычисления момента:  — плечо силы относительно точки О.
— плечо силы относительно точки О.
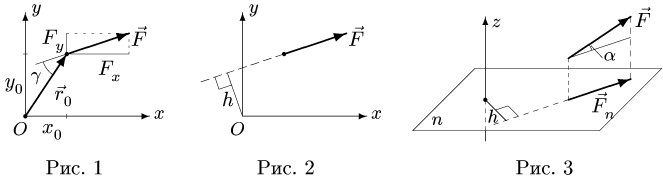
Знак определяется по правилу векторного произведения. Если сила поворачивает тело относительно центра по часовой стрелке — момент отрицательный, против часовой стрелки — положительный. На рис. 2 момент силы  относительно точки О отрицательный. Если сила или линия ее действия пересекает точку, то момент силы относительно этой точки равен нулю.
относительно точки О отрицательный. Если сила или линия ее действия пересекает точку, то момент силы относительно этой точки равен нулю.
При решении задач пространственной статики (§ 4.3 — § 4.6) требуется вычислять момент силы относительно оси, или, что то же, проекцию момента силы относительно точки (1) на ось, проходящую через нее. Иногда эту величину удобнее искать как момент проекции  силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с плоскостью (рис. 3). Знак определяем по направлению вращения вокруг оси с точки зрения наблюдателя, находящегося на конце оси. Если вращение происходит по часовой стрелке, то момент отрицательный, против часовой стрелки — положительный.
силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с плоскостью (рис. 3). Знак определяем по направлению вращения вокруг оси с точки зрения наблюдателя, находящегося на конце оси. Если вращение происходит по часовой стрелке, то момент отрицательный, против часовой стрелки — положительный.
Момент силы относительно оси равен нулю, если сила параллельна оси или пересекает ее, т.е., если сила и ось лежат в одной плоскости.
Кроме сил в статике рассматриваются и пары сил. Пара — .это совокупность двух равных параллельных противоположно направленных сил. Пара характеризуется моментом — суммой моментов ее сил относительно некоторой точки. Легко показать, что положение точки не существенно и на величину момента не влияет, поэтому момент пары является свободным вектором. Напомним, что вектор силы является вектором скользящим. В зависимости от знака момента пары на плоскости изображать пару будем изогнутой стрелкой  Не путать эту стрелку с вектором пары! Вектор пары перпендикулярен ее плоскости.
Не путать эту стрелку с вектором пары! Вектор пары перпендикулярен ее плоскости.
Решение двух задач статики в системе Maple V приведено в § 15.1, 15.2. Большинство задач статики сводится к решению систем линейных уравнений. Рутинную часть работы по составлению и решению уравнений можно поручить Maple V. Простейшая программа может выглядеть, например, так:
Записывая уравнение на компьютере, а не на бумаге, вы достигаете сразу же нескольких целей. Во-первых, компьютер выполняет математические действия, часто весьма громоздкие. Во-вторых, уравнение легко поправить и сразу же пересчитать, если вы ошиблись при составлении уравнения и ответ не сходится. В-третьих, решение удобно оформить, распечатав его на принтере. Можно вывести график, таблицу результатов и т.д. Все эти действия можно выполнить и в других системах, в частности, в пакете AcademiaXXI.
Плоская система сходящихся сил
При изучении темы ПЛОСКАЯ СИСТЕМА СХОДЯЩИХСЯ СИЛ вы научитесь составлять уравнения проекций и решать задачи равновесия плоских стержневых систем методом вырезания узлов. Этот метод лежит в основе компьютерной программы расчета ферм (§15.1).
Простая стержневая система
Постановка задачи. Плоская шарнирно-стержневая конструкция закреплена на неподвижном основании и нагружена в шарнирах силами. Найти усилия в стержнях.
План решения:
Рассматриваем равновесие внутренних шарниров системы, не соединенных с неподвижным основанием. Такие шарниры будем называть узлами. Действие каждого стержня заменяем его реакцией — силой, направленной из узла к стержню. Усилие — это проекция реакции стержня на внешнюю нормаль к сечению. Если в результате решения задачи реакция стержня, приложенная таким образом к узлу, оказывается отрицательной, то стержень сжат, в противном случае стержень растянут.
- 1. Вырезаем узел, соединенный только с двумя стержнями. Действие стержней заменяем их реакциями.
- 2. Для полученной системы сходящихся сил составляем уравнения равновесия в проекциях на выбранные для этого узла оси.
- 3. Решаем систему двух линейных уравнений и находим искомые усилия.
- 4. Вырезаем очередной узел системы, тот, к которому подходят не более двух стержней с неизвестными усилиями. Составляем и решаем уравнения равновесия в проекциях на оси, выбранные для этого
Простая стержневая система:
узла. Этот пункт плана выполняем несколько раз для всех узлов до нахождения всех усилий.
- 5. Для проверки решения мысленно отделяем конструкцию от основания, заменяя действие рассеченных стержней найденными реакциями. Проверяем выполнение условий равновесия полученной системы сил.
Замечание 1. Существуют фермы , у которых к каждому узлу присоединены более двух стержней. Например, на рис. 4 изображена конструкция (сетчатая ферма В.Г.Шухова), к каждому узлу которой подходит по три стержня. Диагональные стержни расположены в разных плоскостях и не пересекаются.
Здесь нельзя определять усилия по предложенной схеме, переходя от одного узла к другому, так как нет узла, с которого можно начать расчет. В этом случае сначала составляются уравнения равновесия отдельных узлов, а потом совместно решается система полученных уравнений. Систему можно решать любым известным способом.
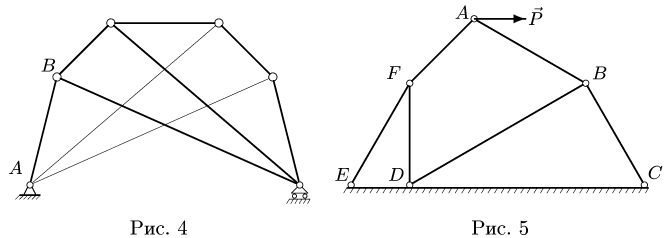
Замечании 2. Для упрощения уравнений равновесия одну из осей координат можно направить вдоль стержня с неизвестным усилием. Для каждого узла можно выбрать свою систему координат.
Замечание 3. Углы между осями и векторами усилий легче определять, если проводить через узлы вспомогательные вертикальные или горизонтальные прямые.
Замечание 4. Усилия в стержнях можно найти с помощью системы Maple V (Программа 1, с. 3-50).
*)Шарнирно-стержневая конструкция, нагруженная в шарнирах силами, называется фермой. Весом стержней фермы и трением в шарнирах пренебрегают.
Пример. Плоская шарнирно-стержневая конструкция закреплена на неподвижном основании шарнирами Е, D, С и нагружена в шарнире А горизонтальной силой Р = 100 кН (рис. 5). Даны утлы:  Найти усилия в стержнях.
Найти усилия в стержнях.
Решение
Конструкция состоит из шести стержней, соединенных тремя шарнирами (узлами). Узлы фермы находятся в равновесии. Для каждого узла А, В, F составляем по два уравнения равновесия в проекциях на выбранные оси. Из шести уравнений находим шесть искомых усилий.
1. Решение задачи начинаем с рассмотрения узла А, так как этот узел соединен только с двумя стержнями А В и AF. При вырезании узла действие каждого стержня заменяем силой, направленной из шарнира к стержню (рис. 6).
2. Составляем уравнения равновесия. Для упрощения уравнений ось  направляем по стержню АВ. Получаем
направляем по стержню АВ. Получаем
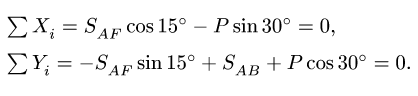
где  — проекции силы
— проекции силы  на ось х, a
на ось х, a  — проекции силы на ось
— проекции силы на ось 
3.Решаем уравнения. Из первого уравнения системы находим усилие  из второго — усилие
из второго — усилие 
4. Рассматриваем узел F. К нему подходят три стержня (рис. 7).
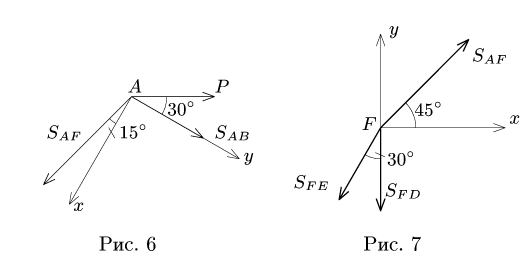
Усилие в одном из них уже известно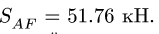 Усилия в двух других находим из уравнений для проекций:
Усилия в двух других находим из уравнений для проекций:

Находим 
Составляем уравнения равновесия узла В в проекциях на оси, направленные по стержням ВС и BD (рис. 8):
Решая уравнения, получаем: 

5. Проверка. Рассматриваем равновесие конструкции в целом.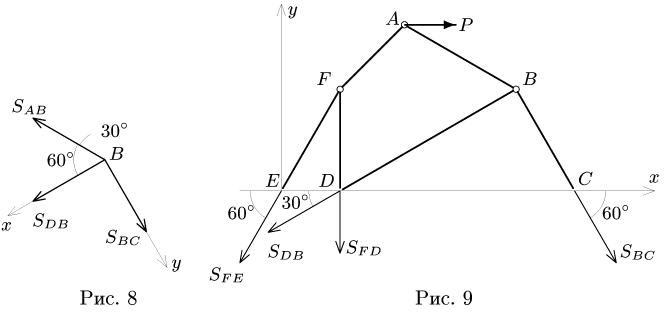
Горизонтальным сечением отсекаем ферму от основания. Действия стержней заменяем силами, которые направляем, как и раньше, по внешним нормалям к сечениям стержней, т.е. вниз (рис. 9).
Система сил, действующих на ферму, не является сходящейся. Для такой системы справедливы три уравнения равновесия, одно из которых — уравнение моментов. Составление уравнения моментов — тема задач статики произвольной плоской или пространственной системы сил (§2.1 — 3.2). Для того, чтобы не выходить за пределы темы поставленной задачи, в решении которой используются только уравнения проекций, составим два уравнения проекций на оси  всех сил, действующих на ферму целиком:
всех сил, действующих на ферму целиком:

Суммы равны нулю. Это подтверждает правильность решения. Результаты расчетов в кН заносим в таблицу
 |
|
 |
 |
 |
 |
| 51.76 | -73.21 | 73.21 | -26.79 | 36.60 | -63.40 |

Равновесие цепи
Постановка задачи. Определить положение равновесия плоского шарнирно-стержневого механизма, состоящего из последовательно соединенных невесомых стержней. Механизм расположен в вертикальной плоскости. В крайних точках механизм шарнирно закреплен на неподвижном основании. Средние шарниры нагружены силами. Найти усилия в стержнях.
Особенностью задачи является необычный для статики объект исследования — механизм, имеющий возможность двигаться. При определенном соотношении нагрузок и геометрических параметров механизм принимает положение равновесия. В качестве искомой величины может быть угол или какая-либо другая геометрическая характеристика конструкции. План решения
- 1. Записываем уравнения равновесия узлов системы в проекциях.
- 2. Решаем полученную систему уравнений. Определяем усилия в стержнях и искомый угол.
- 3. Проверяем равновесие конструкции в целом, освобождая ее от внешних связей. Проверочным уравнением может быть уравнение проекций на какую-либо ось.
Задача 19.
Определить положение равновесия плоского симметричного шарнирно-стержневого механизма. Концы А и Е шарнирно закреплены на неподвижном основании. Три внутренних шарнира В, С и D нагружены одинаковой вертикальной нагрузкой Q.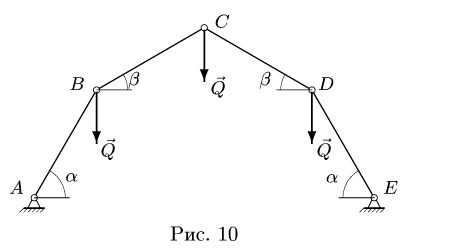
В положении равновесия  — 60°. Определить угол
— 60°. Определить угол  и усилия в стержнях (рис. 10). Весом стержней пренебречь.
и усилия в стержнях (рис. 10). Весом стержней пренебречь.
Решение
Конструкция, данная в условии задачи, представляет собой механизм, находящийся в равновесии только при некоторых определенных нагрузках. При изменении направлений и величин нагрузок меняется и конфигурация конструкции. Одной из неизвестных величин задачи (помимо усилий в стержнях) является угол . Для решения задачи используем метод вырезания узлов.
1. Записываем уравнения равновесия узлов системы. Составим уравнения равновесия узла С (рис.11):

Конструкция симметрична, поэтому уравнения равновесия узлов В и D запишутся одинаково. Рассмотрим равновесие узла В (рис.12).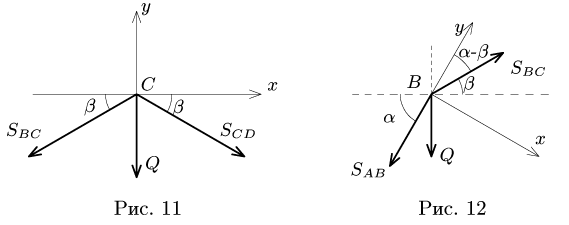
Для упрощения уравнений направим ось у по стержню АВ, ось х — перпендикулярно АВ. Тогда, уравнение равновесия в проекции на ось х содержит только одну неизвестную величину:

2. Решаем систему уравнений (1-4). Из (1) получаем, что 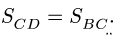 Это равенство объясняется симметрией конструкции и симметрией нагрузок. Из (2) и (4) с учетом полученного равенства находим
Это равенство объясняется симметрией конструкции и симметрией нагрузок. Из (2) и (4) с учетом полученного равенства находим

Выражаем  из (5) и подставляем в (3):
из (5) и подставляем в (3):
 Так как
Так как  то после сокращения на
то после сокращения на  получаем уравнение для
получаем уравнение для 

или Из (5) получаем усилие
Из (5) получаем усилие  Стержень ВС сжат. Из (6) находим усилие
Стержень ВС сжат. Из (6) находим усилие

В силу симметрии задачи  Результаты расчетов заносим в таблицу:
Результаты расчетов заносим в таблицу:
3. Проверка. Рассмотрим равновесие всей конструкции в целом
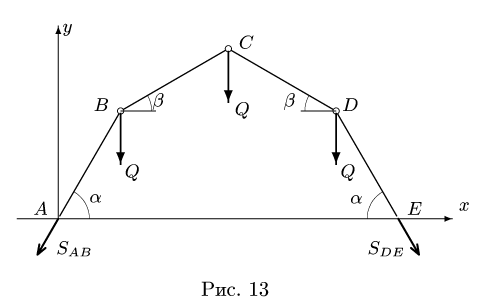
Отсекая стержни от основания, заменим их действие реакциями, направленными по внешним нормалям к сечениям стержней, т.е. вниз (рис. 13). Уравнение проекций на ось х составлять не имеет смысла — в силу симметрии оно лишь подтвердит, что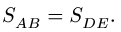 Проверяем равенство нулю суммы проекций всех сил на вертикаль:
Проверяем равенство нулю суммы проекций всех сил на вертикаль: Задача решена верно.
Задача решена верно.
Теорема о трех силах
Постановка задачи. Тело находится в равновесии под действием трех сил, одна из которых известна, у другой известно только направление, а у третьей не известны ни величина, ни направление. Используя теорему о трех силах, найти неизвестные силы.
План решения:
В теореме о трех силах утверждается, что если на тело, находящееся в равновесии, действуют три непараллельные силы (включая реакции опор), то они лежат в одной плоскости, и линии их действия пересекаются в одной точке.
- 1. Найдем точку пересечения линий действия двух сил, направления которых известны. Через эту точку должна пройти и линия действия третьей силы.
- 2. Имея направления векторов трех сил, строим из них силовой треугольник. Начало одного вектора является концом другого. Если тело находится в равновесии, то сумма векторов сил, действующих на него, равна нулю. Следовательно, треугольник сил должен быть замкнут.
- 3. Из условия замкнутости треугольника по направлению заданной силы определяем направление обхода треугольника и, следовательно, направления искомых сил.
- 4. Находим стороны силового треугольника — искомые силы.
Задача 20.
Горизонтальный невесомый стержень А В находится в равновесии под действием трех сил, одна из которых вертикальная сила F = 5 кН (рис. 14), другая — реакция опорного стержня CD, а третья — реакция неподвижного шарнира А. Используя теорему о трех силах, найти неизвестные реакции опор.
1.3. Теорема о трех силах
Решение
1. Найдем точку пересечения линий действия двух сил, направления которых известны. Определим направление линии действия третьей силы.
На стержень АВ действуют три силы: заданная сила  реакция
реакция  шарнира А и реакция
шарнира А и реакция  стержня CD. При этом линия действия вектора
стержня CD. При этом линия действия вектора  известна. Она совпадает со стержнем CD, так как стержень нагружен только двумя силами в точках С и D (вес стержня не учитывается). Согласно аксиоме статики эти силы равны по величине и направлены вдоль CD в разные стороны. Направление реакции шарнира А определяем по теореме о трех силах. Линии действия сил
известна. Она совпадает со стержнем CD, так как стержень нагружен только двумя силами в точках С и D (вес стержня не учитывается). Согласно аксиоме статики эти силы равны по величине и направлены вдоль CD в разные стороны. Направление реакции шарнира А определяем по теореме о трех силах. Линии действия сил пересекаются в точке О (рис. 15). Следовательно, АО — линия действия силы
пересекаются в точке О (рис. 15). Следовательно, АО — линия действия силы  Известны только линии действия сил
Известны только линии действия сил  поэтому векторы на рис. 15 не изображаем, пока из силового треугольника не узнаем их направления.
поэтому векторы на рис. 15 не изображаем, пока из силового треугольника не узнаем их направления.
2. Строим силовой треугольник. Сумма векторов сил, находящихся в равновесии, равна нулю, следовательно, треугольник, составленный из 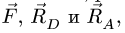 должен быть замкнут.
должен быть замкнут.
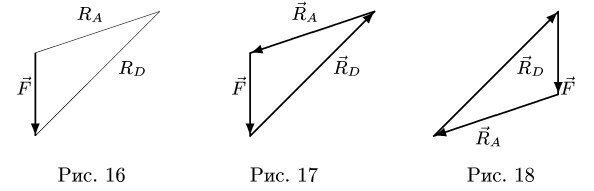
Треугольник строим, начиная с известной силы  (рис. 16). Через начало и конец вектора
(рис. 16). Через начало и конец вектора  проводим прямые, параллельные направлениям
проводим прямые, параллельные направлениям 
3.Из условия замкнутости треугольника по направлению внешней силы  определяем направление обхода треугольника и, следовательно, направления реакций опор.
определяем направление обхода треугольника и, следовательно, направления реакций опор.
Замкнутость треугольника сил означает, что начало одной силы совпадает с концом другой. Отсюда определяем направление обхода треугольника, которое может быть различным в зависимости от способа построения силового треугольника (рис. 17 — против часовой стрелки, рис. 18 — по часовой стрелке). Направления и величины сил в обоих случаях одни и те же.
Изобразим реакции с учетом найденных направлений (рис. 19).
4. Определяем длины сторон силового треугольника — величины реакций опор. Найти стороны треугольника сил означает решить задачу. В нашем случае известны углы (по построению) и сторона F треугольника. Две другие стороны находятся по теореме синусов.
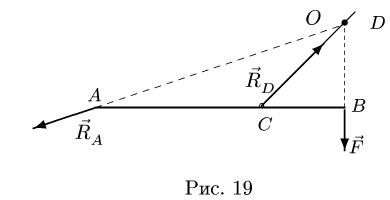
Можно поступить иначе, используя свойства подобия. На рис. 15 найдем треугольник подобный силовому. В ряде случаев этот треугольник очевиден. В общем же, для получения такого треугольника надо выполнить дополнительные построения: провести линии, проходящие через характерные точки (шарниры, точки приложения сил и т.п.), параллельно сторонам силового треугольника. Проведем, например, вертикаль  Образуется треугольник
Образуется треугольник  подобный силовому (рис. 15, 17). Подобие следует из условия параллельности сторон треугольников.
подобный силовому (рис. 15, 17). Подобие следует из условия параллельности сторон треугольников.
Найдем стороны треугольника 

Из подобия  имеем соотношения
имеем соотношения

Отсюда вычисляем длины: 

1.3. Теорема о трех силах
Из условия подобия треугольника сил и  следует, что
следует, что

Из этих пропорций находим искомые величины:

Предупреждение типичных ошибок
- Размеры на чертеже сил, приложенных к телу (рис.15), измеряются в единицах длины (м, см), а на силовом треугольнике (рис. 17, 18) в единицах сил Не надо принимать линейные расстояния АО, СО и ВО за величины соответствующих сил.
- Реакция гладкого основания перпендикулярна поверхности основания. Реакция гладкой поверхности тела о неподвижную опору перпендикулярна поверхности тела.
- В данной задаче должно быть только три силы. Лишние силы возникают, если прикладывать вес тела там, где его нет, или если реакцию в шарнире А раскладывать на составляющие.
 Не надо принимать линейные расстояния АО, СО и ВО за величины соответствующих сил.
Не надо принимать линейные расстояния АО, СО и ВО за величины соответствующих сил.- Трение
- Пространственная система сил
- Центр тяжести
- Кинематика точки
- Моменты силы относительно точки и оси
- Теория пар сил
- Приведение системы сил к простейшей системе
- Условия равновесия системы сил

Рассмотрим условия равновесия произвольной плоской и пространственной систем сил, включая три основные формы и частные случаи равновесия для систем параллельных и сходящихся сил:
Из основной теоремы статики следует, что любая система сил и моментов, действующих на твердое тело, может быть приведена к выбранному центру и заменена в общем случае главным вектором и главным моментом.
Если система уравновешена, то получаем условия равновесия: R=0, MO=0. Из этих условий для пространственной системы сил получается шесть уравнений равновесия, из которых могут быть определены шесть неизвестных:
∑xi =0, ∑Mix=0;
∑yi =0, ∑Miy=0; (1.20)
∑zi =0, ∑Miz=0.
Формы условий равновесия
Первая форма
Для плоской системы сил (например, в плоскости Oxy) из этих уравнений получаются только три:
∑xi=0;
∑yi=0; (1.21)
∑MO=0,
причем оси и точка O, относительно которой пишется уравнение моментов, выбираются произвольно. Это первая форма уравнений равновесия.
Вторая форма
Уравнения равновесия могут быть записаны иначе:
∑xi =0;
∑MA=0; (1.22)
∑MB=0.
Это вторая форма уравнений равновесия, причем ось Ox не должна быть перпендикулярна линии, проходящей через точки A и B.
Третья форма
∑MA=0;
∑MB=0; (1.23)
∑MC=0.
Это третья форма уравнений равновесия, причем точки A, B и C не должны лежать на одной прямой.
Предпочтительность написания форм уравнений равновесия зависит от конкретных условий задачи и навыков решающего.
Другие условия равновесия
При действии на тело плоской системы параллельных сил одно из уравнений исчезает и остаются два уравнения (рисунок 1.26, а):
∑xi =0;
∑MO=0. (1.24)
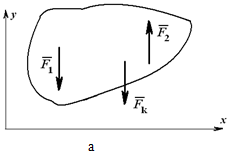
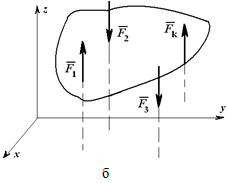
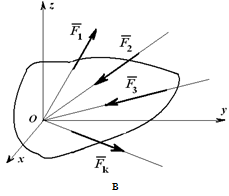
Рисунок 1.26
Для пространственной системы параллельных сил (рисунок 1.26, б) могут быть записаны три уравнения равновесия:
∑zi =0;
∑Mix=0; (1.25)
∑Miy=0.
Для системы сходящихся сил (линии действия которых пересекаются в одной точке) можно написать три уравнения для пространственной системы:
∑xi =0;
∑yi =0; (1.26)
∑zi =0
и два уравнения для плоской системы:
∑xi =0;
∑yi =0. (1.27)
В каждом из вышеприведенных случаев число неизвестных, находимых при решении уравнений, соответствует числу записанных уравнений равновесия.
Примеры решения задач >
Равновесие системы сходящихся сил >
Сохранить или поделиться с друзьями
Вы находитесь тут:
На нашем сайте Вы можете получить решение задач и онлайн помощь
Подробнее
В
данной лекции рассматриваются следующие
вопросы
-
Проекция
силы на ось и на плоскость. -
Геометрический
способ сложения сил. -
Равновесие
системы сходящихся сил. -
Момент
силы относительно центра или точки. -
Теорема
Вариньона о моменте равнодействующей. -
Пара
сил. -
Момент
пары. -
Свойства
пар. -
Сложение
пар. -
Теорема
о параллельном переносе силы. -
Приведение
плоской системы сил к данному центру. -
Условия
равновесия произвольной плоской системы
сил. -
Случай
параллельных сил. -
Решение
задач.
Изучение этих
вопросов необходимо в дальнейшем для
изучения центра тяжести, произвольной
пространственной системы сил, сил трения
скольжения, моментов трения качения,
решения задач в дисциплине «Сопротивление
материалов».
Проекция
силы на ось и на плоскость.
Перейдем к
рассмотрению аналитического
(численного) метода решения задач
статики. Этот метод основывается на
понятии о проекции силы на ось. Как и
для всякого другого вектора, проекцией
силы на ось называется скалярная
величина, равная взятой с соответствующим
знаком длине отрезка, заключенного
между проекциями начала и конца силы.
Проекция имеет знак плюс, если перемещение
от ее начала к концу происходит в
положительном направлении оси, и знак
минус — если в отрицательном. Из определения
следует, что проекции данной силы на
любые параллельные и одинаково
направленные оси равны друг другу.
Этим удобно пользоваться при вычислении
проекции силы на ось, не лежащую в одной
плоскости с силой.
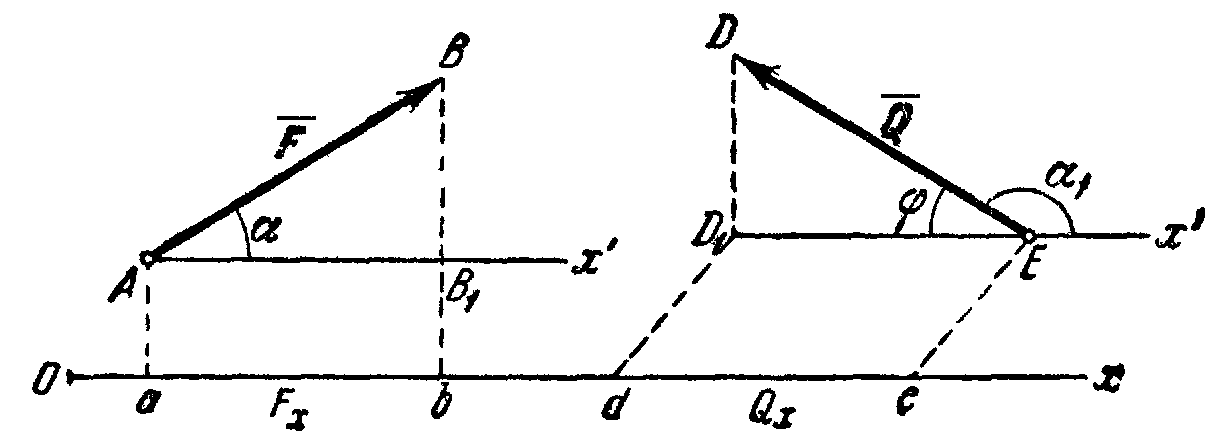
Рис. 12
Обозначать
проекцию силы
![]()
на ось Ох
будем символом
![]() .
.
Тогда для сил, изображенных на рис. 12,
получим:
![]() ,
,
![]() .
.
Но
из чертежа видно, что
![]() ,
,![]() .
.
Следовательно,
![]() ,
,
![]() ,
,
т.
е. проекция силы на ось равна произведению
модуля силы на косинус угла между
направлением силы и положительным
направлением оси. При этом проекция
будет положительной, если угол между
направлением силы и положительным
направлением оси — острый, и отрицательной,
если этот угол — тупой; если сила
перпендикулярна к оси, то ее проекция
на ось равна нулю.

Рис.13
Проекцией
силы
![]()
на плоскость Оху
называется вектор
![]() ,
,
заключенный между проекциями начала и
конца силы
![]()
на эту плоскость (рис. 13). Таким образом,
в отличие от проекции силы на ось,
проекция силы на плоскость есть величина
векторная, так как она характеризуется
не только своим численным значением,
но и направлением в плоскости
Оху. По модулю
![]() ,
,
где![]() — угол между направлением силы
— угол между направлением силы
![]()
и ее проекции
![]() .
.
В некоторых случаях
для нахождения проекции силы на ось
бывает удобнее найти сначала ее проекцию
на плоскость, в которой эта ось лежит,
а затем найденную проекцию на плоскость
спроектировать на данную ось. Например,
в случае, изображенном на рис. 13, найдем
таким способом, что

Геометрический
способ сложения сил.
Решение многих
задач механики связано с известной из
векторной алгебры операцией сложения
векторов и, в частности, сил. Величину,
равную геометрической сумме сил
какой-нибудь системы, будем называть
главным вектором этой системы сил.
Понятие о геометрической сумме сил не
следует смешивать с понятием о
равнодействующей, для многих систем
сил, как мы увидим в дальнейшем,
равнодействующей вообще не существует,
геометрическую же сумму (главный вектор)
можно вычислить для любой системы сил.
Геометрическая
сумма (главный вектор) любой системы
сил определяется или последовательным
сложением сил системы по правилу
параллелограмма, или построением
силового многоугольника. Второй способ
является более простым и
удобным.
Для нахождения этим способом суммы сил
![]() ,
,
![]() ,
,
![]() …,
…,
![]()
(рис. 14, a),
откладываем от произвольной точки
О (рис. 14, б)
вектор Oa,
изображающий в выбранном масштабе cилу
F1,
от точки a
откладываем вектор
![]() ,
,
изображающий силуF2,
от точки b
откладываем вектор bc,
изображающий силу F3
и т. д.; от конца m
предпоследнего вектора откладываем
вектор mn,
изображающий силу
Fn.
Соединяя
начало первого вектора с концом
последнего, получаем вектор
![]() =
=![]() ,
,
изображающий
геометрическую сумму или главный вектор
слагаемых сил:
![]() или
или
![]()
От
порядка, в котором будут откладываться
векторы сил, модуль и направление
![]() не зависят. Легко видеть, что проделанное
не зависят. Легко видеть, что проделанное
построение представляет собою
результат последовательного применения
правила силового треугольника.

Рис.14
Фигура,
построенная на рис. 14,б,
называется силовым (в общем случае
векторным) многоугольником. Таким
образом, геометрическая сумма или
главный вектор нескольких сил
изображается замыкающей стороной
силового многоугольника, построенного
из этих сил (правило силового
многоугольника). При построении векторного
многоугольника следует помнить, что у
всех слагаемых векторов стрелки должны
быть направлены в одну сторону (по обводу
многоугольника), а у вектора
![]() — в сторону противоположную.
— в сторону противоположную.
Равнодействующая
сходящихся сил.
При изучении статики мы будем
последовательно переходить от рассмотрения
более простых систем сил к более сложным.
Начнем с рассмотрения системы
сходящихся сил. Сходящимися
называются силы, линии действия
которых пересекаются в одной точке (см.
рис. 14, а).
По
следствию из первых двух аксиом статики
система сходящихся сил, действующих на
абсолютно твердое тело, эквивалентна
системе сил, приложенных в одной точке
(на рис. 14, а
в точке А).
Последовательно
применяя аксиому параллелограмма сил,
приходим к выводу, что система
сходящихся сил имеет равнодействующую,
равную геометрической сумме (главному
вектору) этих сил и приложенную в точке
их пересечения. Следовательно, если
силы
![]() ,
,
![]() ,
,
…,
![]()
сходятся в точке A
(рис. 14, а),
то сила, равная главному вектору
![]() ,
,
найденному построением силового
многоугольника, и приложенная в точкеА,
будет равнодействующей этой системы
сил.
Равновесие
системы сходящихся сил.
Из законов механики
следует, что твердое тело, на которое
действуют взаимно уравновешенные
внешние силы, может не только находиться
в покое, но и совершать движение, которое
мы назовем движением «по инерции».
Таким движением будет, например,
поступательное равномерное и прямолинейное
движение тела.
Отсюда получаем
два важных вывода: 1) Условиям равновесия
статики удовлетворяют силы, действующие
как на покоящееся тело, так и на тело,
движущееся «по инерции». 2) Уравновешенность
сил, приложенных к свободному твердому
телу, является необходимым, но не
достаточным условием равновесия (покоя)
самого тела; в покое тело будет при этом
находиться лишь в том случае, если оно
было в покое и до момента приложения к
нему уравновешенных сил.
Для равновесия
приложенной к твердому телу системы
сходящихся сил необходимо и достаточно,
чтобы равнодействующая этих сил была
равна нулю. Условия, которым при этом
должны удовлетворять сами силы, можно
выразить в геометрической или
аналитической форме.
1.
Геометрическое условие равновесия. Так
как равнодействующая
![]() сходящихся сил определяется как
сходящихся сил определяется как
замыкающая сторона силового многоугольника,
построенного из этих сил, то![]() может обратиться в нуль тогда и только
может обратиться в нуль тогда и только
тогда, когда конец последней силы в
многоугольнике совпадает с началом
первой, т.
е. когда многоугольник замкнется.
Следовательно,
для равновесия системы, сходящихся сил
необходимо и достаточно, чтобы силовой
многоугольник, построенный из этих
сил, был замкнут.
2. Аналитические
условия равновесия. Аналитически
равнодействующая системы сходящихся
сил определяется формулой
![]() .
.
Так
как под корнем стоит сумма положительных
слагаемых, то R
обратится в нуль только тогда, когда
одновременно
![]() ,
,![]() ,
,![]() ,
,
т. е. когда действующие на тело силы
будут удовлетворять равенствам:
![]()
![]()
![]()
Равенства выражают
условия равновесия в аналитической
форме: для равновесия пространственной
системы сходящихся сил необходимо и
достаточно, чтобы суммы проекций этих
сил на каждую из трех координатных осей
были равны нулю.
Если все действующие
на тело сходящиеся силы лежат в одной
плоскости, то они образуют плоскую
систему сходящихся сил. В случае плоской
системы сходящихся сил получим, очевидно,
только два условия равновесия
![]()
![]()
Равенства выражают
также необходимые условия (или уравнения)
равновесия свободного твердого тела,
находящегося под действием сходящихся
сил.
Пример
1. На рис.15
показаны три силы. Проекции сил
![]() и
и![]() на осих, у,
на осих, у,
z
очевидны:
![]()
![]()
![]()
![]()
![]()
![]()
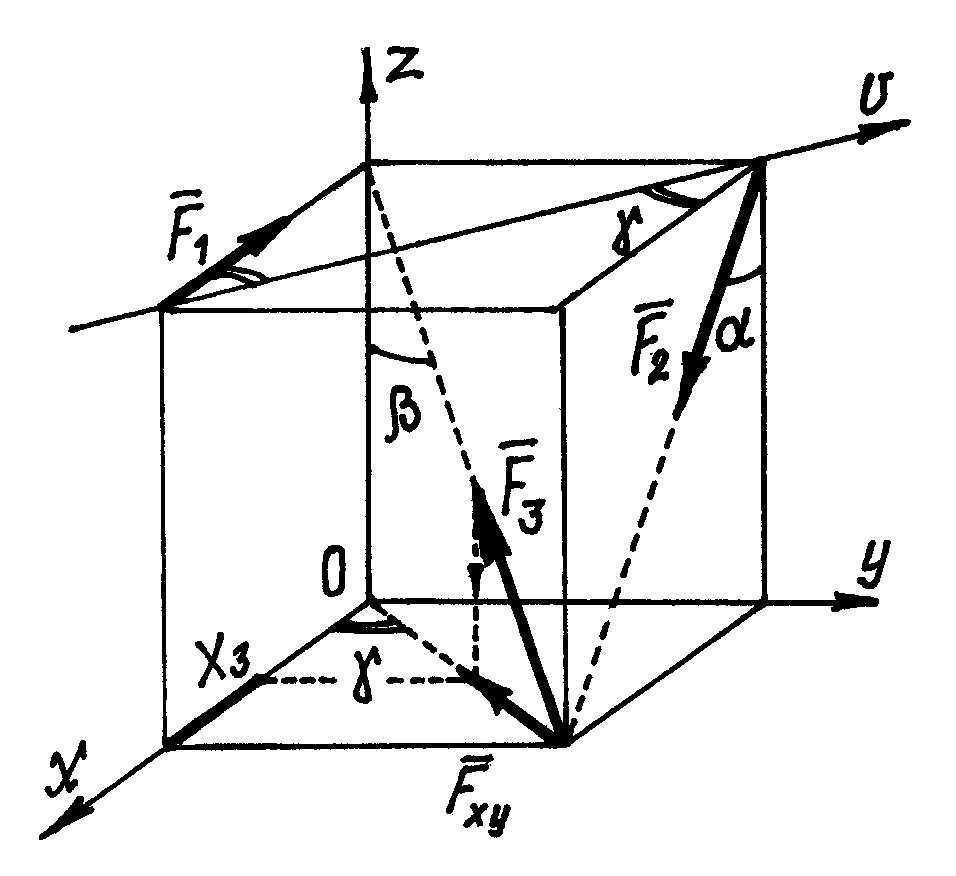
Рис.15
А
Рис.
2.4.
чтобы найти проекцию силы![]() на осьх
на осьх
нужно использовать правило
двойного проектирования.
Проектируем
силу сначала на плоскость хОу,
в которой расположена ось (рис.15), получим
вектор
![]() ,
,
величиной![]() а затем его проектируем на осьх:
а затем его проектируем на осьх:
![]()
Аналогично
действуя, найдём проекцию на ось у:
![]() .
.
Проекция
на ось z
находится проще:
![]() .
.
Нетрудно
убедиться, что проекции сил на ось V
равны:
![]()
![]()
![]()
При определении
этих проекций удобно воспользоваться
рис.16, видом сверху на расположение
сил и осей.

Рис.16
Вернёмся к
системе сходящихся сил (рис. 17). Проведём
оси координат с началом в точке пересечения
линий действия сил, в точке О.
Мы
уже знаем, что равнодействующая сил
![]() .
.
Спроектируем это векторное равенство
на оси. Получим проекции равнодействующей![]() на осиx,
на осиx,
y,
z:

Они
равны алгебраическим суммам проекций
сил на соответствующие оси. А зная
проекции равнодействующей, можно
определить и величину её как диагональ
прямоугольного параллелепипеда
![]()
или
![]() .
.
Направление
вектора
![]() найдём с помощью направляющих косинусов
найдём с помощью направляющих косинусов
(рис.17):
![]()
![]()
![]()
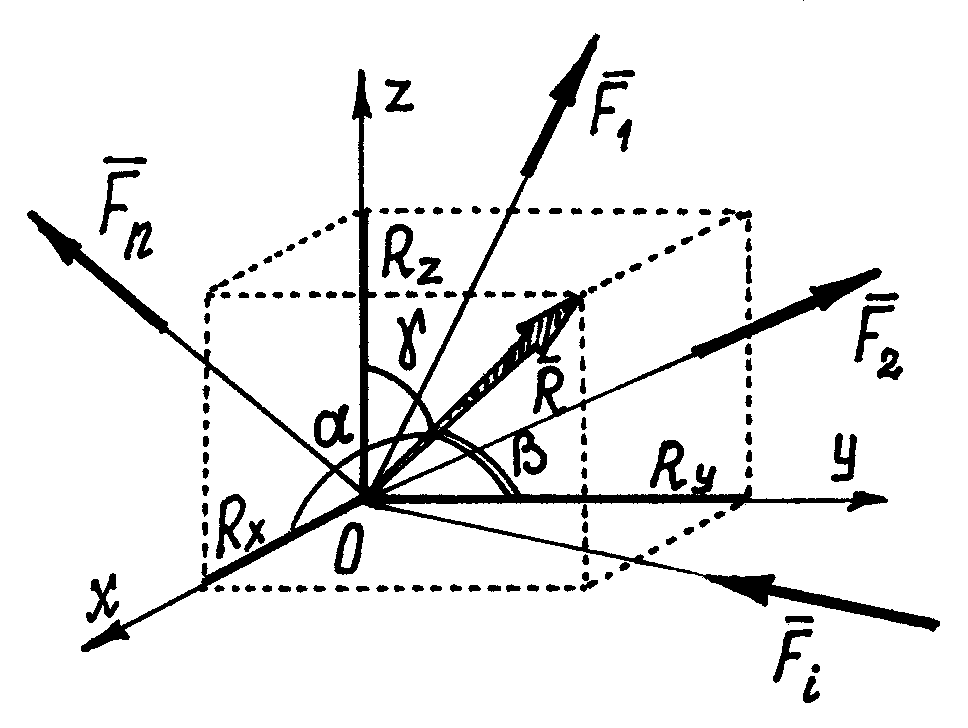
Рис.17
Пример
2. На шар, вес
которого Р,
лежащий на
горизонтальной плоскости и привязанный
к ней нитью АВ,
действует сила F
(рис.18). Определим реакции связей.

Рис.18
Следует сразу
заметить, что все задачи статики решаются
по одной схеме, в определённом порядке.
Продемонстрируем
ее на примере решения этой задачи.
1. Надо выбрать
(назначить) объект равновесия – тело,
равновесие которого следует
рассмотреть, чтобы найти неизвестные.
В этой задаче,
конечно, объект равновесия – шар.
2.
Построение расчётной схемы.
Расчётная схема – это объект равновесия,
изображённый отдельно, свободным телом,
без связей, со всеми силами, действующими
на него: реакциями и остальными силами.
Показываем
реакцию нити
![]() и нормальную реакцию плоскости –
и нормальную реакцию плоскости –![]() (рис.18). Кроме них на шар действуют
(рис.18). Кроме них на шар действуют
заданные силы![]() и
и
![]() .
.
3. Надо
установить какая получилась система
сил и составить соответствующие
уравнения равновесия.
Здесь
получилась система сходящихся сил,
расположенных в плоскости, для которой
составляем два уравнения (оси можно
проводить произвольно):
![]()
![]() ,
,
![]()
![]()
4. Решаем
систему уравнений и находим неизвестные.
![]()
![]()
По
условию задачи требовалось найти
давление шара на плоскость. А мы нашли
реакцию плоскости на шар. Но, по определению
следует, что эти силы равны по величине,
только давление на плоскость будет
направлено в противоположную сторону,
вниз.
Пример
3.Тело весомРприкреплено к
вертикальной плоскости тремя стержнями
(рис.19). Определим усилия в стержнях.
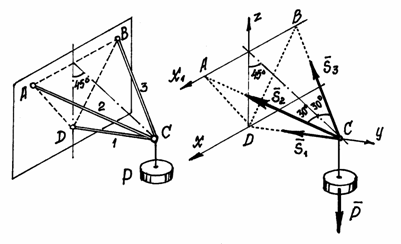
Рис.19
В
этой задаче объект равновесия – узел
С
вместе с грузом. Он нарисован отдельно
с реакциями, усилиями в стержнях
![]() ,
,
![]() ,
,
![]() ,
,
и весом
![]() .
.
Силы образуют пространственную систему
сходящихся сил. Составляем три уравнения
равновесия:
![]()
![]()
![]()
![]()
![]()
![]()
Из
первого уравнения следует: S2
= S3.
Тогда из третьего:
![]() а
а
из второго:
![]()
Когда
мы направляли усилие в стержне от узла,
от объекта равновесия, предполагали,
что стержни работают на растяжение.
Усилие в стержне CD
получилось отрицательным. Это значит
– стержень сжат. Так что знак усилия в
стержне указывает как работает стержень:
на растяжение или на сжатие.
Момент
силы относительно центра (или точки).
Опыт показывает,
что под действием силы твердое тело
может наряду с поступательным перемещением
совершать вращение вокруг того или
иного центра. Вращательный эффект силы
характеризуется ее моментом
Рассмотрим
силу
![]() ,
,
приложенную в точке А
твердого тела (рис. 20). Допустим, что сила
стремится повернуть тело вокруг центра
О.
Перпендикуляр h,
опущенный из центра O
на линию действия силы
![]() ,
,
называется плечом силы
![]()
относительно центра О.
Так как точку приложения силы можно
произвольно перемещать вдоль линии
действия, то, очевидно, вращательный
эффект силы будет зависеть: 1) от модуля
силы F
и длины плеча h;
2) от положения плоскости поворота
ОАВ,
проходящей через центр О
и силу F;
3) от направления поворота к этой
плоскости.

Рис.20
Ограничимся пока
рассмотрением систем сил, лежащих в
одной плоскости. В этом случае плоскость
поворота для всех сил является общей и
в дополнительном задании не нуждается.
Тогда
для количественного измерения
вращательного эффекта можно ввести
следующее понятие о моменте силы:
моментом силы
![]()
относительно центра О
называется величина, равная взятому с
соответствующим знаком произведению
модуля силы на длину плеча.
Момент
силы
![]()
относительно центра О
будем обозначать символом m0(F).
Следовательно,
![]()
В
дальнейшем условимся считать, что момент
имеет знак плюс, если сила стремится
повернуть тело вокруг центра О
против хода
часовой стрелки, и знак минус, — если
по ходу часовой стрелки. Так, для силы
![]() ,
,
изображенной на рис.20,а,
момент относительно центра О
имеет знак плюс, а для силы, показанной
на рис.20,б,
— знак минус.
Отметим следующие
свойства момента силы:
1)
Момент силы не изменяется при переносе
точки приложения силы вдоль
ее линии
действия.
2)
Момент силы относительно центра О
равен нулю только тогда, когда сила
равна нулю или когда линия действия
силы проходит через центр О
(плечо равно
нулю).
3)
Момент силы численно выражается удвоенной
площадью треугольника ОАВ
(рис. 20,б)
![]()
Этот результат
следует из того, что
![]()
Теорема
Вариньона о моменте равнодействующей.
Докажем следующую
теорему Вариньона: момент равнодействующей
плоской системы сходящихся сил
относительно любого центра равен
алгебраической сумме моментов
слагаемых сил относительно того же
центра.
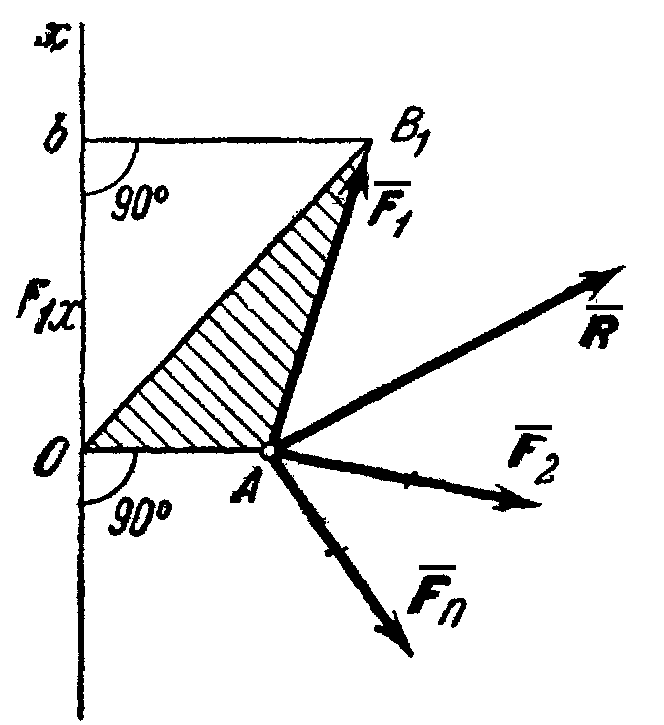
Рис.21
Рассмотрим
систему сил
![]() ,
,
![]() ,
,
…,
![]() ,
,
сходящихся в точке А
(рис.21). Возьмем произвольный центр О
и проведем через него ось Ох,
перпендикулярную к прямой ОА;
положительное направление оси Ох
выбираем так, чтобы знак проекции любой
из сил на эту ось совпадал со знаком ее
момента относительно центра О.
Для
доказательства теоремы найдем
соответствующие выражения моментов
m0(![]() ),
),
m0(![]() ),
),
… . По формуле
![]() .
.
Но, как видно из рисунка,![]() ,
,
гдеF1x
— проекция силы
![]()
на ось Ох;
следовательно
![]() .
.
Аналогично
вычисляются моменты всех других сил.
Обозначим
равнодействующую сил
![]() ,
,
![]() ,
,
…,
![]() ,
,
через
![]() ,
,
где
![]() .
.
Тогда, по теореме о проекции суммы сил
на ось, получим![]() .
.
Умножая обе части этого равенства наОА,
найдем:
![]()
или,
![]() .
.
Пара
сил. Момент пары.
Парой сил (или
просто парой) называются две силы, равные
по величине, параллельные и направленные
в противоположные стороны (рис.22).
Очевидно,
![]() ,
,![]() и
и![]() .
.

Рис.22
Несмотря на то,
что сумма сил равна нулю, эти силы не
уравновешиваются. Под действием этих
сил, пары сил, тело начнёт вращаться. И
вращательный эффект будет определяться
моментом пары:
![]() .
.
Расстояние a
между линиями действия сил называетсяплечом пары.
Если пара вращает
тело против часовой стрелки, момент её
считается положительным (как на рис.22),
если по часовой стрелке – отрицательным.
Для того, чтобы
момент пары указывал и плоскость, в
которой происходит вращение, его
представляют вектором.
Вектор момента
пары
![]() направляется перпендикулярно плоскости,
направляется перпендикулярно плоскости,
в которой расположена пара, в такую
сторону, что если посмотреть оттуда,
увидим вращение тела против часовой
стрелки (рис. 23).
Нетрудно доказать,
что вектор момента пары
![]() – есть вектор этого векторного
– есть вектор этого векторного
произведения (рис. 23). И заметим, что
он равен вектору момента силы![]() относительно точкиА, точки приложения
относительно точкиА, точки приложения
второй силы:
![]() .
.
О точке приложения
вектора
![]() будет сказано ниже. Пока приложим
будет сказано ниже. Пока приложим
его к точкеА.

Рис.23
Соседние файлы в папке Теоретическая механика
- #
- #

Алексей Алексеевич Ивахно
Эксперт по предмету «Физика»
Задать вопрос автору статьи
Система сходящихся сил — это система таких сил, линии действия которых полностью сходятся в одной точке. Действие каждой силы на абсолютно твердое тело не меняется при переносе силы вдоль линии ее действия на иную точку тела.
Система сходящихся сил
Определение 1
Сила — мера механического взаимодействия материальных объектов. По своей природе сила — векторная величина и в общем случае она характеризуется:
- направлением и линией действия;
- численной величиной (модулем);
- точкой приложения.
Пусть дана произвольная система сил, $(F_1,F_2… F_n)$, приложенных к твердому телу. Перенесем эти силы, как скользящие векторы, в точку пересечения линий их действия. Затем, пользуясь аксиомой о параллелограмм сил, найдем равнодействующую этих сил.
![]()
Сдай на права пока
учишься в ВУЗе
Вся теория в удобном приложении. Выбери инструктора и начни заниматься!
Получить скидку 3 000 ₽
Равнодействующую $R$ такой системы сил можно определить графически и аналитически.
Графически равнодействующая сила определяется как замыкающая сторона многоугольника сил: $ vec {R} = sum limits_{i=i}^{n} = vec {F_i}$
Аналитически равнодействующую силу можно определить по ее проекциями на оси прямоугольной системы координат. Здесь и далее применяем правую систему координат. По теореме о проекции векторной (Геометрической) суммы на оси координат получим:
$ R_x = sum limits_{i=i}^{n} = F_ix$
$ R_y = sum limits_{i=i}^{n} = F_iy$
$ R_z = sum limits_{i=i}^{n} = F_iz$
где $F_ix, F_iy, F_iy$ — проекции соответствующих сил на оси координат. Тогда модуль равнодействующей $R$ запишем в виде:
$R = sqrt { (sum limits_{i=i}^{n} = F_ix)^2 + (sum limits_{i=i}^{n} = F_iy)^2 + (sum limits_{i=i}^{n} = F_iz)^2 }$
Или
$sqrt {sum limits_{i=i}^{n} = F_ix = 0}$
$sqrt {sum limits_{i=i}^{n} = F_iy = 0}$
$sqrt {sum limits_{i=i}^{n} = F_iz = 0}$
Направление равнодействующей силы определяется такими направляющими косинусами:
«Системы сил теоретичесой механики» 👇
$cos {(R, t)} = frac {Rx}{R}$
$cos {(R, j) } = frac {Ry}{R}$
$cos {(R, k)} = frac {Rz}{R}$
Условия равновесия системы сходящихся сил
Теорема 1
Для равновесия системы сходящихся сил (далее система сил) необходимо и достаточно, чтобы равнодействующая сила была равна нулю: $R=0$
Необходимость условия равновесия следует из того, что заданная система сил, приложенных к твердому телу, эквивалентна одной силе — равнодействующей $Р$. Очевидно, что под действием одной силы тело будет находиться в равновесии только тогда, когда эта сила равна нулю, что следует из аксиомы о двух силы.
Докажем достаточность этого условия. Для этого покажем, что когда равнодействующая сила равна нулю, то система сил находится в равновесии. Заданная система сил эквивалентна равнодействующей, равной нулю. Из определения уравновешенной (эквивалентной нулю) системы сил, ее можно отбросить, не нарушая состояния системы. Тогда на тело не действуют никакие силы, и оно по первому закону Ньютона находится в равновесии. Поскольку
$ vec{R} = sum limits_{i=i}^{n} = vec{F_i} = 0$
то многоугольник сил должен быть замкнутым, то есть конец последней силы $F$ совпадает с началом первой силы, $F_1$, что выражает условие равновесия системы сил в графической форме.
Векторной части равенства соответствуют три скалярные части равенства:
$R_x=0$,
$R_y=0$,
$R_z=0$, которые с учетом формул, перепишем в виде
$ sum limits_{i=i}^{n} = F_ix = 0$
$ sum limits_{i=i}^{n} = F_iy = 0$
$ sum limits_{i=i}^{n} = F_iz = 0$
Эти данные являются условиями равновесия системы сил в аналитической форме и формулируются так: для равновесия пространственной системы сил необходимо и достаточно, чтобы алгебраические суммы проекций сил были взаимно перпендикулярные оси и равны нулю.
В случае равновесия системы сил, лежащих в одной плоскости, например, $0xy$, получим
$ sum limits_{i=i}^{n} = F_ix = 0$
$ sum limits_{i=i}^{n} = F_iy = 0$
Условия равновесия называются также уравнениями равновесия. С их помощью определяются неизвестные величины при решении конкретных задач. Если неизвестными силами являются реакции связей, то их количество не должно превышать числа уравнений равновесия, иначе задача будет статически неопределенной и решить ее методами теоретической механики не получится.
Преобразование произвольной системы сил
Теорема 2
Силу, которая приложена к твердому телу, можно перенести параллельно в иную точку тела, прибавляя силу с периодом, равным периоду переносимой силы касательно точки, куда она переносится.
Указанное преобразование – это сходящаяся сумма и система сил моментов пар сил. Взаимодействие системы сил, которые заменяют действие суммарной силы, и взаимодействие моментов — называется суммарным моментом.
Общий суммарный вектор $R$ — это основной вектор системы сил.
Общий cуммарный момент $M_o (F_k)$ — это основной момент системы сил.
Таким образом, произвольная система сил в тождественном преобразовании приводится к главному моменту системы сил и главному вектору.
Аналитически главный момент и главный вектор системы сил определяются через их проекции на общей оси координат:
$R = sqrt { sum limits_{i=i}^{n} R_kx_2 +sum limits_{i=i}^{n} R_ky_2 + sum limits_{i=i}^{n} R_kz_2 }$
$M = sqrt { sum limits_{i=i}^{n} M_kx_2 + sum limits_{i=i}^{n} M_ky_2 + sum limits_{i=i}^{n} M_kz_2 }$
Условия для равновесия систем сил
Равновесие системы сил. Все воздействие системы сил схоже с действием одной равнодействующей силы. Для процесса равновесия тела нужно, чтобы равнодействующая была равна нулю $R=0$.
Из формулы говориться о том, что $R = sqrt { (sum limits_{i=i}^{n} = F_kx_2) + (sum limits_{i=i}^{n} = F_ky_2) + (sum limits_{i=i}^{n} = F_kz_2) }$
Для процесса равновесия пространственной системы для сил достаточно и необходимо, чтобы общая сумма проекций сил на оси $X, Y, Z$ была равна нулю $sum {F_kx} = 0$, $sum {F_ky} = 0$, $sum {F_kz} = 0$.
Для процесса равновесия плоской системы сил нужно, чтобы сумма проекций сил на оси $X, Y$ была равна нулю
$sum {F_kx} = 0$, $sum {F_ky} = 0$.
Равновесие произвольной системы сил. Общее воздействие произвольной системы сил равно действию главного момента и главного вектора. Для процесса равновесия достаточно выполнения и необходимо условия: $R = 0$, $M_0 (F_k)=0$
Для процесса равновесия произвольной системы сил достаточно и необходимо, чтобы общие суммы проекций для всех сил на оси $X, Y, Z$ и общей суммы моментов сил касательно осей $X, Y,Z$ равнялись нулю:
$sum {F_kx} = 0$, $sum {F_ky} = 0$, $sum {F_kz} = 0$.
$sum {M_kx (F_x)} = 0$, $sum {M_ky (F_x)} = 0$, $sum {M_kz (F_x)} = 0$.
Для процесса равновесия произвольной плоской системы сил достаточно и необходимо, чтобы общая сумма проекций основного вектора на оси $X, Y$, и сумма моментов (алгебраическая) сил относительно центра $О$ равнялись нулю:
$sum {F_kx} = 0$, $sum {F_ky} = 0$, $sum {M_o (F_x)} = 0$.
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме
Содержание:
- Произвольная пространственная система сил
- Аналитическое определение главного вектора и главного момента произвольной пространственной системы сил
- Аналитические условия равновесия произвольной пространственной системы сил
- Аналитические условия равновесия пространственной системы параллельных сил
- Примеры решения задач на равновесие под действием пространственной системы сил
- Условия равновесия несвободного твердого тела
- Условия равновесия твердого тела с одной неподвижной точкой
- Условия равновесия тела с двумя закрепленными точками
- Инварианты сведения произвольной пространственной системы сил
- Зависимость главного момента от выбора центра сведения
- Инварианты системы сил
- Частичные случаи возведения произвольной пространственной системы сил
- Примеры возведения системы сил
- Произвольная пространственная система сил и решение задач
- Условия равновесия произвольной пространственной системы сил
- Порядок решения задач на равновесие произвольной пространственной системы сил
- Образец выполнения решения задач на темы С4
- Момент силы относительно оси
- Условия равновесия произвольной пространственной системы сил
- Порядок решения задач на тему: Произвольная пространственная система сил
- Примеры решения задачна тему: Произвольная пространственная система сил
- Произвольная пространственная система сил и условия ее равновесия
- Лемма о параллельном переносе линии действия сил
- Главный вектор и главный момент сил. Основная теорема статики
- Основная теорема статики
- Условия равновесия произвольной пространственной системы сил
- Условия равновесия системы сил в отдельных случаях
- Условия равновесия твердого тела с неподвижной точкой
- Условия равновесия твердого тела, имеющего две неподвижные точки или неподвижную ось
- Условия равновесия произвольной плоской системы сил
- Условия равновесия параллельных сил, которые лежат в плоскости
- Трение качения. Равновесие при наличии сил трения
- Пространственная система произвольных сил
- Пары сил в пространстве
- Теорема о переносе пары в параллельную плоскость
- Условия эквивалентности пар в пространстве
- Добавление пар в пространстве
- Условия равновесия системы пар в пространстве
- Возведение пространственной системы произвольных сил к данному центра. Главный вектор и главный момент системы
- Вычисление главного вектора и главного момента пространственной системы произвольных сил
- Некоторые случаи сведения пространственной системы произвольных сил к данному центру
Произвольной пространственной системой сил называется система сил, линии действия которых не лежат в одной плоскости. Согласно основной теореме статики (теореме Пуансо) любую произвольную систему сил, действующую на твердое тело, можно заменить эквивалентной системой, состоящей из силы (главного вектора системы) и пары сил (главного момента системы сил ).
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Произвольная пространственная система сил
Произвольная пространственная система сил — это система сил, векторы которых
произвольным образом размещены в пространстве.
Как показано в § 5.2, произвольная пространственная система сил сводится к главному вектору  и главногу моменту
и главногу моменту 

а также доказано, что для равновесия этой системы сил необходимо и достаточно, чтобы главный вектор и главный момент системы были равны нулю:

В данном разделе выясним, как аналитически найти главный вектор и главный момент произвольной пространственной системы сил, установим аналитические условия ее уравновешивания, а также рассмотрим возможные частичные случаи возведения этой системы сил.
Аналитическое определение главного вектора и главного момента произвольной пространственной системы сил
Для вычисления главного вектора и главного момента произвольной пространственной системы сил используем метод проекции, для чего выберем декартову систему координат (рис. 9.1).
Проектируя первое уравнение (9.1) на оси выбранной системы координат, найдем проекции  главного вектора на оси:
главного вектора на оси:


Из формул (9.3) следует: проекция главного вектора системы сил на ось равна алгебраической сумме проекций всех сил системы на эту же ось.

Модуль и направление главного вектора определяются формулами:

Проектируя второе равенство (9.1) на оси координат, получим:

или с учетом равенств (3.8), (3.10)

Итак, проекция главного момента относительно центра на любую ось, проходит через центр, равен алгебраической сумме моментов всех сил относительно этой же оси.
Алгебраическая сумма моментов всех сил, приложенных к механической системы, относительно любой оси называется главным моментом системы сил относительно этой оси. Главные моменты системы сил относительно координатных осей будем обозначать через  Тогда из формул (9.5) следует, что:
Тогда из формул (9.5) следует, что: 
Модуль и направление главного момента определяются равенствами:

Заметим, что с учетом формул (3.12) главные моменты системы сил относительно координатных осей могут быть представлены через координаты  точек приложения сил и их проекции
точек приложения сил и их проекции  на оси координат, а именно:
на оси координат, а именно:

Аналитические условия равновесия произвольной пространственной системы сил
С векторных условий равновесия (9.2) произвольной пространственной системы сил
следует, что модули главного вектора и главного момента должны равняться нулю, а на основе формул (9.4) и (9.6) это равносильно шести алгебраическим равенствам, которые выражают условия равновесия этой системы сил в аналитической форме:

Итак, для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил системы на три координатные оси и алгебраические суммы их моментов относительно этих самых осей были равны нулю.
Заметим, что условия равновесия (9.8) произвольной пространственной системы сил, приложенных к свободному твердому телу, будут необходимы, но не достаточными условиями равновесия этого тела. Как будет показано в динамике, свободное твердое тело, за выполнение условий равновесия (9.8), может двигаться поступательно, прямолинейно и равномерно вдоль осей координат и одновременно равномерно вращаться вокруг этих осей. Для того, чтобы условия равновесия (9.8) произвольной пространственной системы сил были одновременно и условиями равновесия свободного твердого тела, к которому эта система сил приложена, нужно, чтобы в приложения данной системы сил тело находилось в покое относительно выбранной системы отсчета.
Аналитические условия равновесия пространственной системы параллельных сил
Если линии действия всех сил системы не расположены в одной плоскости и параллельные между собой, то такая система сил называется пространственной системой параллельных сил.
С условий равновесия (9.8) для произвольной пространственной системы сил получим условия равновесия пространственной системы параллельных сил.

Пусть на твердое тело действует пространственная система параллельных сил (рис. 9.2). Поскольку выбор координатных осей произвольный, то можно выбрать координатные
оси так, чтобы ось  была параллельна к силам. При таком выборе координатных осей
была параллельна к силам. При таком выборе координатных осей
проекции каждой из сил на оси х и у и их моменты относительно оси  будут равны нулю, то есть равенства:
будут равны нулю, то есть равенства:

превращаются в тождества. Поэтому для системы параллельных сил с (9.8) получим только три условия равновесия:

Итак, для равновесия пространственной системы параллельных сил необходимо и достаточно, чтобы алгебраическая сумма проекций всех сил на ось, параллельную этих сил, и алгебраические суммы их моментов относительно двух других координатных осей были равны нулю.
Заметим, что выведенные ранее условия равновесия для сходящейся и произвольной плоской системы сил могут также быть получены из условий равновесия (9.8).
Условия равновесия различных систем сил приведены в табл. 9.1.
Таблица 9.1
Условия равновесия систем сил



Примеры решения задач на равновесие под действием пространственной системы сил
Задача 9.1. С помощью коловорота (рис. 9.3) удерживается груз, вес которого Пренебрегая весом коловорота, определить давление на подшипники А и В и силу
Пренебрегая весом коловорота, определить давление на подшипники А и В и силу  которую нужно приложить перпендикулярно к рукоятке СD длиной 54 см, при ее вертикальном положении. Радиус барабана r = 12 см.
которую нужно приложить перпендикулярно к рукоятке СD длиной 54 см, при ее вертикальном положении. Радиус барабана r = 12 см.
Решение. При содержании груза сила натяжения шнура равна весе груза Р.

Рассматривая круговорот как свободное тело, приложим к нему активные силы  и реакции
и реакции которые возникают в подшипниках А и В. На водоворот действует произвольная пространственная система сил, которая должна удовлетворять условиям равновесия (9.8). Выбираем оси координат, как показано на рис. 9.3, и составляем уравнения равновесия:
которые возникают в подшипниках А и В. На водоворот действует произвольная пространственная система сил, которая должна удовлетворять условиям равновесия (9.8). Выбираем оси координат, как показано на рис. 9.3, и составляем уравнения равновесия:

 -это уравнение удовлетворяется тождественно:
-это уравнение удовлетворяется тождественно:

Решая эту систему уравнений, находим неизвестную силу  и реакции в опорах:
и реакции в опорах:

Задача 9.2. Тонкая однородная плита ABCD весом P = 6 кН поддерживается в горизонтальном положении шестью опорными стержнями (Рис. 9.4).
К плите в точке А приложена горизонтальная сила F = 2,4 кН, которая действует по прямой АD. Пренебрегая весом стержней и считая их крепления шарнирными, определить усилия в них, если 

Решение. Рассмотрим равновесие плиты. Активными силами, приложенными к плите, будут силы и вес плиты
и вес плиты  которая приложена в центре симметрии прямоугольника АВСD. Действие шести стержней на плиту заменяем реакциями. Считаем по-прежнему, что все стержни растянуты и их реакции направлены от узлов (рис. 9.4).На плиту действует произвольная пространственная произвольная система сил и при ее равновесии должны выполняться условия (9.8).
которая приложена в центре симметрии прямоугольника АВСD. Действие шести стержней на плиту заменяем реакциями. Считаем по-прежнему, что все стержни растянуты и их реакции направлены от узлов (рис. 9.4).На плиту действует произвольная пространственная произвольная система сил и при ее равновесии должны выполняться условия (9.8).
Составляем уравнение равновесия:

Учитывая заданные размеры, вычисляем синусы и косинусы углов α и β:

Решая полученную систему уравнений равновесия, найдем усилия:

С решении задачи следует, что стержень 2 растянут, стержни 3 и 6 сжаты, а 1, 4 и 5 — ненагруженные.
Задача 9.3. Подъемный кран (рис. 9.5) установлен на трехколесном коляске. Известны размеры крана AD = DB = 1 м, CD = 1,5 м, СМ = 1 м, KL = = 4 м. Кран уравновешивается противовесом Е. Вес Р крана с противовесом равен 80 кН и приложена в точке О, расположенной в плоскости LSTM на расстоянии ОН = 1 м от оси крана MК. Найти
давление колес на рельсы для такого положения крана, когда его плоскость LSTM параллельная АВ, а вес поднимаемого груза, равен Q = 40 кН.

Решение. Объектом равновесия выбираем тележку вместе с краном. На кран действуют две вертикальные силы: вес  крана с противовесом и вес груза
крана с противовесом и вес груза  Действие связей А, В и С заменяем реакциями
Действие связей А, В и С заменяем реакциями и
и  которые направлены вертикально вверх (трением в опорах пренебрегаем). Механическая система (кран — тележка) находится в равновесии
которые направлены вертикально вверх (трением в опорах пренебрегаем). Механическая система (кран — тележка) находится в равновесии
под действием пространственной системы параллельных сил, которая удовлетворяет условиям равновесия (9.9).
Направляем оси координат, как показано на рис. 9.5, и складываем уравнения равновесия

Решая эту систему, найдем неизвестные реакции 

Давление колес на рельсы численно равна найденным реакциям и направлено вертикально вниз.
Условия равновесия несвободного твердого тела
Под условиями равновесия несвободного твердого тела будем понимать те условия, которые должны удовлетворять активные силы, чтобы несвободное тело находилось в состоянии равновесия.
Условия равновесия твердого тела с одной неподвижной точкой
Если твердое тело с одной закрепленной точкой О (рис. 9.6), которую считаем сферическим шарниром, освободить от этой связи, то для составляющих силы реакции  и приложенных к телу активных сил
и приложенных к телу активных сил  можно составить шесть условий равновесия:
можно составить шесть условий равновесия:

Три первых уравнения в (9.10) содержат неизвестные реакции точки В и являются уравнениями равновесия. Задача статически означена. Приложенные к телу силы
удовлетворяют трем аналитическим условиям равновесия, в которые не входят неизвестные составляющие реакции связи: алгебраические суммы моментов активных сил
относительно координатных осей с началом в закрепленной точке равны нулю. С учетом формул (9.7) аналитические условия равновесия твердого тела с одной закрепленной точкой запишутся в виде:

Условия равновесия тела с двумя закрепленными точками
Рассмотрим условия, которые должны удовлетворять активные силы  приложенные к твердому телу с двумя неподвижными точками А и В, то есть с неподвижной осью АВ (рис. 9.7), чтобы оно находилось в состоянии равновесия.
приложенные к твердому телу с двумя неподвижными точками А и В, то есть с неподвижной осью АВ (рис. 9.7), чтобы оно находилось в состоянии равновесия.


Для исследования этого вопроса применим аксиому освобождение от связей. Поскольку реакции связей в точках А и В являются неизвестными по величине и направлением, разложим каждую на три составляющие, направив эти составляющие по положительных направлениях координатных осей которые выбираем так, как показано на рис. 9.7.
которые выбираем так, как показано на рис. 9.7.
Составим уравнения равновесия рассматриваемого твердого тела, предположив, что АВ = h. иметь:

Рассматривая уравнения (9.12), видим, что первые пять уравнений устанавливают зависимость между реакциями связей в точках А и В и активными силами. В шестом уравнения входят только активные силы. Итак, это уравнение и является условием равновесия твердого тела с двумя неподвижными точками, которая формулируется так: несвободное твердое тело с двумя закрепленными точками (или неподвижной осью) будет находиться в равновесии, если алгебраическая сумма моментов активных сил относительно неподвижной оси равна нулю.
Заметим, что в задачи неизвестных реакций шесть, а уравнений для их определение лишь пять и, следовательно, всего пять неизвестных можно определить. Из уравнений (9.12) видно, что отдельно невозможно определить и
и  можно определить только их сумму
можно определить только их сумму  Задача определения сил реакций есть статически неопределенной. Для того, чтобы ее сделать статически обозначенной, в одной из точек вместо сферического нужно поставить цилиндрический шарнир. Если цилиндрический шарнир поставить в точке А, тогда
Задача определения сил реакций есть статически неопределенной. Для того, чтобы ее сделать статически обозначенной, в одной из точек вместо сферического нужно поставить цилиндрический шарнир. Если цилиндрический шарнир поставить в точке А, тогда  так как реакция цилиндрического шарнира перпендикулярна его оси, в нашем случае перпендикулярной оси
так как реакция цилиндрического шарнира перпендикулярна его оси, в нашем случае перпендикулярной оси  После этого неизвестных реакций будет только пять и задача станет статически обозначенной.
После этого неизвестных реакций будет только пять и задача станет статически обозначенной.
Инварианты сведения произвольной пространственной системы сил
Вернемся к анализу основной теоремы статики о возведении произвольной пространственной системы сил к заданному центру. Выясним, как меняется главный момент от изменения центра сводки, и установим инварианты сведения.
Зависимость главного момента от выбора центра сведения
Предположим, что в результате возведения произвольной пространственной системы
сил к центру О получено главный вектор
к центру О получено главный вектор  и главный момент
и главный момент  а в результате возведения к центру
а в результате возведения к центру  соответственно
соответственно (Рис. 9.8). Главный вектор для любого центра возведения равна геометрической сумме заданных сил, следовательно
(Рис. 9.8). Главный вектор для любого центра возведения равна геометрической сумме заданных сил, следовательно  Главный момент, как видно из формулы (5.2), зависит от выбора центра сводки.
Главный момент, как видно из формулы (5.2), зависит от выбора центра сводки.

Найдем выражения главных моментов относительно двух центров и сравним их.
Радиусы-векторы точек  приложения заданных сил системы относительно этих центров обозначим соответственно через
приложения заданных сил системы относительно этих центров обозначим соответственно через  Имеем
Имеем

Поскольку
поэтому
Итак, главный момент системы сил относительно нового центра возведения  равен геометрической сумме главного момента относительно старого центра сведения В и момента главного вектора, приложенного в старом центре сведения, относительно нового.
равен геометрической сумме главного момента относительно старого центра сведения В и момента главного вектора, приложенного в старом центре сведения, относительно нового.
Инварианты системы сил
Инвариантом сведения системы сил называют величину (векторную или скалярную), которая не изменяется при переходе от одного центра сведение к другому.
Первый инвариант. Главный вектор системы сил не зависит от центра возведения и является первым векторным инвариантом

Второй инвариант. Скалярное произведение главного вектора и главного момента системы сил для произвольного центра сведения — величина постоянная и является вторым скалярным инвариантом.
Для доказательства умножим скалярно обе части равенства (9.13) на главный вектор  Тогда
Тогда 
Поскольку  (первый инвариант), то векторы
(первый инвариант), то векторы  взаимно перпендикулярны, а потому смешанный произведение
взаимно перпендикулярны, а потому смешанный произведение  всегда равен нулю и последнее равенство примет вид
всегда равен нулю и последнее равенство примет вид
То есть 
Второй инвариант можно представить и в другой форме: проекция главного момента на направление главного вектора для произвольного центра возведения есть величина неизменная.
Действительно, 
Согласно (9.14)
а потому
Частичные случаи возведения произвольной пространственной системы сил
Согласно основной теореме статики, заданную систему сил можно свести к силе и паре сил. Частные случаи возможного дальнейшего упрощения заданной системы сил можно разделить на два основных класса в зависимости от величины второго инварианта системы сил.
К первому классу относят системы сил, для которых второй инвариант отличный от нуля; ко второму — системы сил, для которых второй инвариант равен нулю.
Если система сил относится к первому классу  то она может быть сведена к силовому винту, или до двух скрещивающихся сил. В случае, когда система сил относится ко второму классу
то она может быть сведена к силовому винту, или до двух скрещивающихся сил. В случае, когда система сил относится ко второму классу то силовой винт вырождается, то есть эта система сил может быть уравновешена, или сводится к равнодействующей или пары сил.
то силовой винт вырождается, то есть эта система сил может быть уравновешена, или сводится к равнодействующей или пары сил.
Рассмотрим отдельно эти два класса системы сил.
1. Сведения произвольной пространственной системы сил к силовому винту (динами). Система сил, которая состоит из силы  и пары сил
и пары сил плоскость действия которой перпендикулярна к линии действия силы
плоскость действия которой перпендикулярна к линии действия силы  называется силовым винтом, или динамою (рис. 9.9).
называется силовым винтом, или динамою (рис. 9.9).
Система сил, которая образует силовой винт, прикладывается, например, к гайке, винту, штопора при их закручивании. Момент  пары сил
пары сил  входящей в силовой винт, параллельный линии действия силы
входящей в силовой винт, параллельный линии действия силы 
Докажем, что в случае, когда второй инвариант не равен нулю, система сил сводится к силовому винту.

Предположим, что в результате сведения заданной системы сил к центрку О получено главный вектор  и главный момент
и главный момент  для которых
для которых  (рис. 9.10).
(рис. 9.10).
Если скалярное произведение  и главный вектор
и главный вектор 
не перпендикулярно к главному моменту  Разложим вектор
Разложим вектор  на две компоненты:
на две компоненты:  первая из которых параллельна вектору
первая из которых параллельна вектору  А вторая — перпендикулярна к нему. Заметим, что расписание главного момента на две компоненты означает эквивалентную замену одной пары сил двумя.
А вторая — перпендикулярна к нему. Заметим, что расписание главного момента на две компоненты означает эквивалентную замену одной пары сил двумя.
В соответствии со вторым инвариантом вектор  как коллинеарная составляющая главного момента по направлению главного вектора, является для данной системы сил величиной постоянной, не зависящей от выбора центра сведения
как коллинеарная составляющая главного момента по направлению главного вектора, является для данной системы сил величиной постоянной, не зависящей от выбора центра сведения Следовательно, при изменении центра сведения, меняться только перпендикулярна составляющая
Следовательно, при изменении центра сведения, меняться только перпендикулярна составляющая 
Если выбрать новую точку сведения  то получим главный вектор и главный момент, которые согласно (9.13) и (9.14) будут равны
то получим главный вектор и главный момент, которые согласно (9.13) и (9.14) будут равны

Положение точки  выбираем так, чтобы
выбираем так, чтобы  то есть
то есть 
С последнего равенства следует, что 
В новой точке сведения  совокупность силы
совокупность силы и пары сил с моментом
и пары сил с моментом  образуют силовой винт (динаму).
образуют силовой винт (динаму).
По правилу векторного произведения, вектор  перпендикулярен вектору
перпендикулярен вектору  то есть будет лежать в плоскости П (рис. 9.10).
то есть будет лежать в плоскости П (рис. 9.10).

Поскольку силу можно перенести по линии действия в любую точку, а момент пары сил
можно перенести по линии действия в любую точку, а момент пары сил  является вектором свободным, то исходная система сил приводится к динами во всех точках прямой
является вектором свободным, то исходная система сил приводится к динами во всех точках прямой  которая является линией действия силы
которая является линией действия силы  Линия
Линия  вдоль которой действует динамический винт, называется центральной осью заданной системы
вдоль которой действует динамический винт, называется центральной осью заданной системы
сил. У системы сил может быть только одна центральная ось, причем, главный момент системы  является наименьшим среди главных моментов заданной системы
является наименьшим среди главных моментов заданной системы
сил относительно различных центров.
Уравнение центральной оси получим с условия коллинеарности главного вектора и главного момента для центра  в векторной и скалярной формах:
в векторной и скалярной формах:

где p — постоянная величина, которая называется параметром винта и имеет размерность длины;  и
и  — соответственно проекции главного вектора
— соответственно проекции главного вектора  и главного момента
и главного момента  на координатные оси
на координатные оси 
Учитывая, что 
векторное уравнение (9.18) запишется в виде 
Выражение (9.19) является уравнением центральной оси в векторной форме. Искомой переменной в этом уравнении является вектор 
Если начало системы координат совместить с точкой O, то
где  — проекции вектора
— проекции вектора  на координатные оси
на координатные оси  .
.
Векторное произведение  согласно уравнению (3.9) равно
согласно уравнению (3.9) равно

Скалярное уравнение (9.18) с учетом выражений для  и векторного произведения запишется в виде
и векторного произведения запишется в виде

где  — проекции главного момента
— проекции главного момента  на координатные оси
на координатные оси  .
.
Выражение (9.20) является искомым уравнением центральной оси заданной системы
сил.
2. Возведение системы сил к двум скрещивающихся силам. Покажем, что произвольную систему сил, для которой второй инвариант  можно еще свести и к двум скрещивающихся силам.
можно еще свести и к двум скрещивающихся силам.
Пусть в результате возведения заданной системы сил к центру В получено главный вектор  и главный момент
и главный момент для которых
для которых  то есть
то есть  не перпендикулярен
не перпендикулярен  (рис. 9.11).
(рис. 9.11).

Главный момент представим в виде пары сил одна из которых проходит через точку В, то есть
одна из которых проходит через точку В, то есть  Система сходящихся сил
Система сходящихся сил  имеет равнодействующую
имеет равнодействующую а потому исходная система сил эквивалентна двум силам
а потому исходная система сил эквивалентна двум силам  и
и  которые лежат в разных плоскостях, то есть скрещивающимися.
которые лежат в разных плоскостях, то есть скрещивающимися.
3. Случаи вырождения силового винта. Рассмотрим теперь второй класс систем сил, для которых второй инвариант равен нулю:

Этот класс систем сил частным случаем систем сил, рассмотренных выше, а потому случаи их возведения является вырождением силового винта. Проанализируем отдельные случаи равенства нулю второго инварианта.
 — главный вектор и главный момент равны нулю. В этом случае система сил уравновешивается.
— главный вектор и главный момент равны нулю. В этом случае система сил уравновешивается.
 — главный вектор равен нулю, а главный момент отличен от нуля. В этом случае система сил сводится к паре сил с моментом, равным главному моменту системы сил, который не зависит от выбора центра приведения (это следует из формулы (9.13)).
— главный вектор равен нулю, а главный момент отличен от нуля. В этом случае система сил сводится к паре сил с моментом, равным главному моменту системы сил, который не зависит от выбора центра приведения (это следует из формулы (9.13)).
 — главный вектор отличный от нуля, а главный момент равен нулю. В этом случае система сил сводится к равнодействующей.
— главный вектор отличный от нуля, а главный момент равен нулю. В этом случае система сил сводится к равнодействующей.
 — главный вектор и главный момент отличные от нуля и взаимно перпендикулярны. В этом случае относительно нового центра систему сил можно свести к равнодействующей. Действительно, если
— главный вектор и главный момент отличные от нуля и взаимно перпендикулярны. В этом случае относительно нового центра систему сил можно свести к равнодействующей. Действительно, если  то, как следует из этого параграфа,
то, как следует из этого параграфа, и
и  и силовой винт в центре
и силовой винт в центре  превращается в равнодействующую силу
превращается в равнодействующую силу 
Уравнение центральной оси (9.20) в этом случае будет уравнением прямой, вдоль которой действует равнодействующая сила.
Классификация системы сил в зависимости от их инвариантов приведены в табл. 9.2.
Таблица 9.2
Возведение произвольной пространственной системы сил к простейшему виду

Примеры возведения системы сил
Задача 9.4. Свести к простому виду систему сил, которая изображена на рис. 9.12, а. Силы, приложенные к вершинам куба, ребро которого равно а;



Решение. Принимаем в центр сведения точку О. Оси координат показано на рис. 9.12, а. Находим проекции  главного вектора
главного вектора  на оси
на оси 

Модуль главного вектора 
Главные моменты  системы сил относительно осей
системы сил относительно осей 

Модуль главного момента 
Относительно центра О система сил свелась к главному вектору  и главного момента
и главного момента  которые изображены на рис. 9.12, б.
которые изображены на рис. 9.12, б.
Проверяем второй инвариант: 
Второй инвариант равен нулю, а  и
и  а потому
а потому 
Итак, относительно точки сведения система сил сводится к равнодействующей.
Уравнение линии действия равнодействующей найдем по формуле (9.20)
Учитывая найденные величины  уравнения линии действия равнодействующей приобретает вид
уравнения линии действия равнодействующей приобретает вид  откуда
откуда  то есть линия действия равнодействующей
то есть линия действия равнодействующей  лежит в плоскости
лежит в плоскости  параллельная оси
параллельная оси  и проходит на расстоянии х = a от нее (рис. 9.12, б).
и проходит на расстоянии х = a от нее (рис. 9.12, б).
Задача 9.5. Свести к простому виду систему четырех одинаковых по значению сил  которые действуют вдоль ребер куба со стороной a (рис. 9.13, а).
которые действуют вдоль ребер куба со стороной a (рис. 9.13, а).
Решение. Центром сведения выберем точку В и подсчитаем проекции и модули главного вектора и главного момента:



Теперь подсчитаем значение второго инварианта системы сил:

Поскольку второй инвариант не равен нулю, то система сил сводится к динами с минимальным моментом который равный по значению
который равный по значению

Подставляя в формулу (9.20) найденные значения 
 получим уравнение центральной оси системы сил
получим уравнение центральной оси системы сил 
откуда 
то есть центральная ось определяется как пересечение плоскостей и
и  и
и
совпадает с диагональю АС передней грани куба (рис. 9.13, б).
Итак, заданная система сил приводится к динами, образованного силой  направленных вдоль линии АС, и парой сил с моментом
направленных вдоль линии АС, и парой сил с моментом  которая лежит в плоскости, перпендикулярной АС.
которая лежит в плоскости, перпендикулярной АС.
Произвольная пространственная система сил и решение задач
Произвольной пространственной системой сил называется система сил, линии действия которых не лежат в одной плоскости.
Условия равновесия произвольной пространственной системы сил
Условия равновесия произвольной пространственной системы сил можно записать следующим образом:

Таким образом, для равновесия произвольной пространственной системы сил, приложенной к твердому телу, необходимо и достаточно, чтобы суммы
проекций всех сил на каждую из трех координатных осей, а также суммы их моментов относительно каждой из этих осей равнялись бы нулю.
Момент силы относительно оси определяется как алгебраическая величина, абсолютное значение которой равняется произведению модуля проекции силы на плоскость, перпендикулярную оси, на расстояние от точки пересечения оси с этой плоскостью до линии действия проекции силы на плоскости (рис.С4.1).
Для определения момента силы относительно оси надо:
а) провести плоскость  которая перпендикулярна до оси;
которая перпендикулярна до оси;
б) спроектировать силу на эту плоскость 
в) из точки пересечения О оси с плоскостью  опустить перпендикуляр
опустить перпендикуляр  на линию действия проекции силы;
на линию действия проекции силы;
г) умножить модуль проекции силы  на длину перпендикуляра
на длину перпендикуляра  и взять произведение положительным, когда направление вращения проекции силы из положительного направления оси
и взять произведение положительным, когда направление вращения проекции силы из положительного направления оси  видно против хода часовой стрелки, и отрицательным, когда вращение видно по ходу часовой стрелки.
видно против хода часовой стрелки, и отрицательным, когда вращение видно по ходу часовой стрелки.
Момент силы  что изображена на рис. С4.1, относительно оси
что изображена на рис. С4.1, относительно оси  равняется
равняется  Момент положительный, поскольку вращение проекции силы вокруг
Момент положительный, поскольку вращение проекции силы вокруг
оси  из положительного направления оси видно против хода часовой стрелки.
из положительного направления оси видно против хода часовой стрелки.

Момент силы относительно оси равен нулю в двух случаях:
1. Когда сила параллельна оси (рис.С4.2, а). В этом случая проекция силы на плоскость равна нулю.
2. Когда линия действия силы пересекает ось (рис.С4.2, б). В этом случае плечо проекции силы равно нулю.

Порядок решения задач на равновесие произвольной пространственной системы сил
При решении задач на равновесие произвольной пространственной системы сил целесообразно придерживаться следующего порядка:
1. Выделить твердое тело, равновесие которого необходимо рассмотреть для нахождения неизвестных величин (объект равновесия).
2. Показать активные силы, что на него действуют.
3. Выяснить характер связей и показать возможные направления их реакций.
4. Проверить, принадлежит ли данная задача к статически определенным, когда число неизвестных величин должно равняться шести.
5. Составить шесть уравнений равновесия.
6. Решить систему уравнений относительно неизвестных величин.
Образец выполнения решения задач на темы С4
Задача 6
Задано: квадратная плита АВСD: АВ = ВС = СД = ДА = АЕ; Р = 1000 Н (рис.1).
Определить: реакцию сферического шарнира А, реакцию цилиндрического шарнира В,
реакцию невесомого стержня СЕ.
Решение. Поскольку задача представляет собой пространственную, то начало системы координат свяжем с точкой A, оси  и
и  разместим в плоскости плиты АВСD,
разместим в плоскости плиты АВСD,
а ось  направим перпендикулярно к ней.
направим перпендикулярно к ней.

Объект равновесия, квадратная плита АВСD, находится в равновесии под действием (см.
П.С1.4, задача № 6) веса плиты  приложенной в центре симметрии плиты; реакции
приложенной в центре симметрии плиты; реакции
 невесомого стержня, которая направленная вдоль него от С до Е;
невесомого стержня, которая направленная вдоль него от С до Е;
реакции сферического шарнира А, которую раскладываем на три составляющие  по осям выбранной системы координат; реакции петли (цилиндрического шарнира) В, которую раскладываем на две составляющие
по осям выбранной системы координат; реакции петли (цилиндрического шарнира) В, которую раскладываем на две составляющие 
Составляющая реакции этого шарнира, параллельная оси  равняется нулю, поскольку шарнир позволяет свободно смещать плиту в этом направлении.
равняется нулю, поскольку шарнир позволяет свободно смещать плиту в этом направлении.
Для записи условий равновесия пространственной системы сил целесообразно пользоваться проекциями пространственной системы сил на плоскости координатной системы.
Рассмотрим проекцию системы сил на плоскость  (рис.2). Силы,
(рис.2). Силы, 
проектируются в натуральную величину. Проекции  и
и  равны нулю,
равны нулю,
поскольку они перпендикулярны к данной плоскости.

Проекцию силы  на плоскость
на плоскость  можно определить таким образом (рис.1):
можно определить таким образом (рис.1):

где 
Запишем сумму проекций всех сил на оси  и
и  и сумму моментов относительно оси
и сумму моментов относительно оси 

Рассмотрим систему сил в проекции на плоскость  (Рисс.3). Силы
(Рисс.3). Силы 
проектируются в натуральную величину. Проекции составляющих, 
равны нулю, поскольку они перпендикулярны к данной плоскости.
Проекцию силы  на плоскость
на плоскость  можно определить так (рис.1):
можно определить так (рис.1):

где 
Воспользовавшись рис. 3 можно сохранить сумму проекций сил на ось  и сумму моментов этих сил относительно оси
и сумму моментов этих сил относительно оси 

где 

Рассмотрим проекцию системы сил на плоскость  (рис.4). Силы
(рис.4). Силы  проектируются в натуральную величину. Проекция силы
проектируются в натуральную величину. Проекция силы  равняется нулю. Проекцию силы
равняется нулю. Проекцию силы  на плоскость
на плоскость  можно определить так
можно определить так
(Рис.1):

Запишем сумму моментов всех сил относительно оси 

где 
Перепишем записанную систему (1) — (6) со всеми подстановками в следующей последовательности:

Из уравнения (11) находим реакцию  невесомого стержня CE:
невесомого стержня CE:

Затем, решив последовательно уравнение (10), (9), (8), (7), достанем 

Ответ:

Момент силы относительно оси
Момент силы относительно оси определяется как алгебраическая величина, абсолютное значение которой равно произведению модуля проекции силы на плоскость, перпендикулярную оси, на расстояние от точки, в которой ось пересекает эту плоскость, к линии действия проекции силы на плоскости.
Для того, чтобы найти момент силы  относительно оси, надо сделать следующее (рис.7.1): 1. Провести плоскость (
относительно оси, надо сделать следующее (рис.7.1): 1. Провести плоскость ( ), перпендикулярную оси.
), перпендикулярную оси.
2. Спроектировать силу на эту плоскость.
3. Из точки  пересечения оси с плоскостью () опустить перпендикуляр
пересечения оси с плоскостью () опустить перпендикуляр  на линию действия проекции силы
на линию действия проекции силы  .
.
4. Умножить модуль проекции силы  на длину перпендикуляра и взять это произведение со знаком плюс, если с положительного направления оси
на длину перпендикуляра и взять это произведение со знаком плюс, если с положительного направления оси  вращения проекции вокруг точки видно против хода часовой стрелки, и со знаком минус, если вращение происходит по ходу часовой стрелки.
вращения проекции вокруг точки видно против хода часовой стрелки, и со знаком минус, если вращение происходит по ходу часовой стрелки.
Таким образом, момент силы вокруг оси (рис.7.1) равен


Момент силы будет положительным, поскольку направление вращения проекции  вокруг оси с положительного стороны оси видно против хода часовой стрелки.
вокруг оси с положительного стороны оси видно против хода часовой стрелки.
Момент силы относительно оси равен нулю в двух случаях:
1. Если линия действия силы параллельна оси (рис.7.2). В этом случае проекция силы на плоскость, перпендикулярную оси, будет равна нулю.

2. Когда линия действия силы пересекает ось (рис.7.3). В этом случае плечо проекции относительно точки будет равняться нулю.

Условия равновесия произвольной пространственной системы сил
Аналитические условия равновесия произвольной пространственной системы сил выражаются следующими уравнениями:

и формулируется так: для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из трех координатных осей и суммы их моментов относительно каждой из этих осей равнялись нулю.
Порядок решения задач на тему: Произвольная пространственная система сил
При решении задач на равновесие произвольной пространственной системы сил рекомендуется придерживаться такой последовательности:
1. Выделить твердое тело, равновесие которого надо рассмотреть для определения неизвестных величин.
2. Показать активные силы, действующие на объект равновесия.
3. Выяснить характер связей и показать на расчетной схеме возможные направления их реакций.
4. Проверить, является ли рассматриваемая задача статически определенной, то есть число неизвестных величин не должно быть больше шести.
5. Составить необходимое число уравнений равновесия.
6. Решить полученную систему уравнений и определить неизвестные величины.
Примеры решения задачна тему: Произвольная пространственная система сил
Задача №1
На горизонтальный вал  (рис.7.4) насажено зубчатое колесо
(рис.7.4) насажено зубчатое колесо  и шестерня
и шестерня  . К колесу по касательной приложена горизонтальная сила
. К колесу по касательной приложена горизонтальная сила  , а к шестерне по касательной приложена вертикальная сила
, а к шестерне по касательной приложена вертикальная сила  .
.
Определить величину силы и реакции подшипников  и
и  в положении равновесия вала, если
в положении равновесия вала, если 

Решение. Рассмотрим равновесие вала , к которому приложены активные силы , и реакции связей опор и (рис.7.4).
Поскольку подшипники и допускают перемещения в осевом направлении  и в этом направлении нет противодействия, то реакции, возникающие в подшипниках, разложим на составляющие по осям
и в этом направлении нет противодействия, то реакции, возникающие в подшипниках, разложим на составляющие по осям  и
и  :
:  ,
,  ,
,  ,
,  .
.
Как видно, на вал действует произвольная пространственная система сил и в случае ее равновесия она должна удовлетворять следующим условиям:

Составим уравнения равновесия в проекциях на оси:

При составлении уравнений моментов сил, надо помнить, что когда сила параллельна оси или пересекает ее, то момент силы относительно этой оси равен нулю.
Так при составлении уравнения суммы моментов относительно оси , силы , , параллельны оси , а сила — пересекает ось. Момент каждой из этих сил относительно оси равен нулю.
При определении момента силы относительно оси , силу предварительно надо спроектировать на плоскость  (она проектируется в натуральную величину), а затем из точки пересечения оси с плоскостью (точка ) опустить перпендикуляр
(она проектируется в натуральную величину), а затем из точки пересечения оси с плоскостью (точка ) опустить перпендикуляр  на линию действия проекции, который и будет ее плечом. Таким образом:
на линию действия проекции, который и будет ее плечом. Таким образом:

В уравнении моментов относительно оси , моменты от сил , , , равняются нулю, поскольку они пересекают ось .
Для определения моментов сил и относительно оси , надо их спроектировать на плоскость  , перпендикулярную этой оси (рис.7.5), и найти плечо этих сил. Силы и проецируются на эту плоскость в натуральную величину.
, перпендикулярную этой оси (рис.7.5), и найти плечо этих сил. Силы и проецируются на эту плоскость в натуральную величину.

Плечом силы будет радиус  , а силы — радиус
, а силы — радиус  .
.
Уравнение суммы моментов относительно этой оси будет иметь вид:

Поскольку моменты сил , ,  , что параллельны оси
, что параллельны оси  , и силы
, и силы  , пересекающей эту ось, равны нулю, а плечом проекции силы на плоскость
, пересекающей эту ось, равны нулю, а плечом проекции силы на плоскость  , перпендикулярную оси , будет
, перпендикулярную оси , будет  , то
, то

С учетом числовых данных уравнения равновесия примут вид:

Решив эту систему, начиная с последнего уравнения, найдем:

Ответ: 

Задача № 2
С помощью невесомого коловорота, схематично изображенного на рис. 7.6., равномерно поднимают груз  Веревка, на которой поднимается груз, набегает на барабан коловорота по касательной, которая наклонена к горизонту под углом
Веревка, на которой поднимается груз, набегает на барабан коловорота по касательной, которая наклонена к горизонту под углом 
Размеры коловорота: 

Определить реакции опор и и силу давления на рукоятку при таком положении ворота, когда рукоятка  займет горизонтальное положение.
займет горизонтальное положение.
Решение. К коловороту приложены внешние силы: давление на рукоятку ворота в точке  ; натяжение веревки
; натяжение веревки  . Вес груза передается через веревку и действует на барабан по касательной, которая наклонена к горизонту под углом (рис.7.6), по модулю
. Вес груза передается через веревку и действует на барабан по касательной, которая наклонена к горизонту под углом (рис.7.6), по модулю 

Поскольку опорные подшипники и допускают перемещение вала по направлению оси , то реакции опор будут иметь составляющие, направленные вдоль осей и :  , , , .
, , , .
Составим уравнение равновесия для произвольной пространственной системы сил, действующей на коловорот. В проекциях на оси получим:

Для удобства определения моментов сил ,  и относительно оси , спроецируем эти силы на плоскость
и относительно оси , спроецируем эти силы на плоскость  перпендикулярную этой оси (рис.7.7).
перпендикулярную этой оси (рис.7.7).

где  — величина проекции силы на плоскость ,
— величина проекции силы на плоскость ,

 , и — плечи сил ,
, и — плечи сил ,  и относительно точки , в которой ось пересекает плоскость .
и относительно точки , в которой ось пересекает плоскость .
Для записи уравнения суммы моментов относительно оси спроецируем все силы на плоскость  (рис.7.8). Поскольку, силы , , и пересекают ось и их моменты относительно этой оси будут равны нулю, то на рис.7.8 их проекции не показаны.
(рис.7.8). Поскольку, силы , , и пересекают ось и их моменты относительно этой оси будут равны нулю, то на рис.7.8 их проекции не показаны.

Силы и , которые параллельны плоскости , будут проецироваться в натуральную величину. Тогда:

И наконец, для суммы моментов относительно оси спроецируем все силы на плоскость (рис.7.9). Поскольку силы , и перпендикулярны плоскости , то их проекции на эту плоскость равны нулю.
Уравнение моментов относительно оси , с учетом того, что сила пересекает эту ось и ее момент равен нулю, будет иметь вид

где  — величина проекции силы на плоскость ,
— величина проекции силы на плоскость ,

и  — плечи сил
— плечи сил  и относительно точки , в которой ось пересекает плоскость .
и относительно точки , в которой ось пересекает плоскость .
С учетом числовых данных система (1) – (6) примет вид:

Решив систему, начиная с последнего уравнения, определим:

Ответ: 

Задача № 3
Прямоугольная дверь (рис.7.10), которая открыта на  удерживаются в этом положении двумя веревками
удерживаются в этом положении двумя веревками  и
и  . Веревка перекинута через блок и натягивается грузом
. Веревка перекинута через блок и натягивается грузом  а веревка прикреплена к полу в точке
а веревка прикреплена к полу в точке  . Вес двери
. Вес двери  ширина
ширина  высота
высота 
Определить натяжение  веревки , реакции цилиндрического шарнира в точке и подпятника в точке .
веревки , реакции цилиндрического шарнира в точке и подпятника в точке .
Силами трения в блоке пренебречь.
Решение. Рассмотрим равновесие дверей  . Примем за начало системы координат точку и направим координатные оси как показано на рис. 7.10.
. Примем за начало системы координат точку и направим координатные оси как показано на рис. 7.10.

На двери действуют: сила тяжести , приложенная в точке на пересечении диагоналей прямоугольника  ; натяжение
; натяжение  веревки , причем
веревки , причем  реакции связей в точках , и
реакции связей в точках , и  .
.
Реакции цилиндрического шарнира , поскольку он допускает перемещение в направлении оси  , представим в виде двух составляющих: и
, представим в виде двух составляющих: и  . Реакции подпятника представим в виде трех составляющих: ,
. Реакции подпятника представим в виде трех составляющих: ,  , . Реакцию веревки
, . Реакцию веревки  , что по величине равна ее натяжению, направим вдоль веревки к точке
, что по величине равна ее натяжению, направим вдоль веревки к точке  .
.
Перед составлением уравнений равновесия разложим натяжение веревки на две составляющие  и
и  , которые параллельны осям
, которые параллельны осям  и
и  , соответственно (рис.7.11).
, соответственно (рис.7.11).

Поскольку  и
и  то треугольник
то треугольник  будет равносторонним, у которого все внутренние углы равны
будет равносторонним, у которого все внутренние углы равны  .
.
С рис. 7.11. получим:

Составим уравнения равновесия для произвольной пространственной системы сил, действующей на дверь:

Для составления уравнений моментов всех сил относительно осей , и  воспользуемся проекциями двери, вместе с приложенными к ней силами, на плоскости
воспользуемся проекциями двери, вместе с приложенными к ней силами, на плоскости  ,
,  и
и  (рис.7.12, 7.13, 7.14).
(рис.7.12, 7.13, 7.14).

В уравнении (4) моменты от сил , и , параллельных оси , и , что пересекает ось , равны нулю.
В уравнении (5) моменты относительно оси от сил ,  , и , что параллельны оси , и и
, и , что параллельны оси , и и  , что пересекают ось , равны нулю.
, что пересекают ось , равны нулю.
В уравнении (6) моменты относительно оси от сил и , параллельных оси , и , , и , что пересекают ось , равны нулю.

Определим плечи  и
и  , входящих в уравнения (4), (5) и (6).
, входящих в уравнения (4), (5) и (6).
Из прямоугольного треугольника  (рис.7.14, 7.11):
(рис.7.14, 7.11):

Из прямоугольного треугольника  (рис.7.14):
(рис.7.14):

Из прямоугольного треугольника  (рис.7.14):
(рис.7.14):

Подставив найденные и заданные числовые данные в составленную систему (1) — (6), получим:

Решив систему (1’) – (6’) в обратном порядке получим:

Ответ: 

Задача № 4
Горизонтальная однородная прямоугольная плита  весом
весом  удерживается в равновесии сферическим шарниром в точке , цилиндрическим шарниром в точке и тросом
удерживается в равновесии сферическим шарниром в точке , цилиндрическим шарниром в точке и тросом  , что наклонен к плоскости под углом
, что наклонен к плоскости под углом  (рис.7.15).
(рис.7.15).

Определить реакции опор и , и натяжение троса , если 

Решение. Рассмотрим равновесие плиты (рис.7.15).
Выберем за начало системы координат точку и направим оси и вдоль ребер плиты, а ось – вертикально.
На объект равновесия действуют: вес плиты , приложенной в точке пересечения диагоналей прямоугольника ; реакции связей в точках , и .
Реакцию сферического шарнира разложим на три составляющие ,  и , направив их по осям выбранной системы координат
и , направив их по осям выбранной системы координат  . Реакции цилиндрического шарнира , так как он допускает перемещение в направлении оси , разложим на две составляющие
. Реакции цилиндрического шарнира , так как он допускает перемещение в направлении оси , разложим на две составляющие  и . Реакцию
и . Реакцию  троса направим вдоль троса к точке подвеса .
троса направим вдоль троса к точке подвеса .
Таким образом, на объект равновесия, плиту, действует произвольная пространственная система сил.
Прежде чем составлять уравнения равновесия, разложим реакцию , которая направлена под углом  к плоскости , на составляющие по осям выбранной системы координат (рис.7.15):
к плоскости , на составляющие по осям выбранной системы координат (рис.7.15):

где  — модуль проекции вектора на плоскость ;
— модуль проекции вектора на плоскость ;

При составлении уравнений равновесия в данной задаче будем придерживаться следующего порядка. Сначала спроектируем систему сил, действующую на объект равновесия, на одну из координатных плоскостей, а затем составим соответствующие уравнения.
Спроецируем все силы, действующие на плиту , на координатную плоскость (рис.7.16). При этом надо помнить, что при проектировании всегда надо смотреть на плоскость с положительного конца оси, перпендикулярной к ней, в данном случае . (На рис.7.16 проекции сил , ,  и , перпендикулярные плоскости , равны нулю).
и , перпендикулярные плоскости , равны нулю).
По данной проекции системы сил можно составить три уравнения равновесия: сумму проекций всех сил на ось ; сумму проекций всех сил на ось ; сумму моментов всех сил относительно оси , что перпендикулярна плоскости и пересекает ее в точке :

В уравнении (3) моменты сил , и  , линии действия которых проходят через точку , пересекают ось ), равны нулю.
, линии действия которых проходят через точку , пересекают ось ), равны нулю.
Спроектируем все силы, действующие на плиту , на плоскость (рис.7.17). (На рис.7.17 проекции сил и  , перпендикулярных плоскости , равны нулю).
, перпендикулярных плоскости , равны нулю).

По данной проекции системы сил можно составить следующие уравнения равновесия: сумму проекций всех сил на ось (это уравнение уже составлено); сумму проекций всех сил на ось ; сумму моментов всех сил относительно оси , которая перпендикулярна плоскости и пересекает ее в точке :

В уравнении (5) моменты сил , , , ,  , линии действия которых проходят через точку (пересекают ось ), равны нулю.
, линии действия которых проходят через точку (пересекают ось ), равны нулю.
Спроектируем все силы, действующие на плиту , на плоскость  (рис.7.18). (На рис. 7.18 проекции сил , , , что перпендикулярны плоскости , равны нулю).
(рис.7.18). (На рис. 7.18 проекции сил , , , что перпендикулярны плоскости , равны нулю).

По данной проекцией системы сил можно составить следующие уравнения равновесия: сумму проекций всех сил на ось (это уравнение уже составлено); сумму проекций всех сил на ось (это уравнение уже составлено); сумму проекций всех сил на ось (это уравнение тоже уже составлено); сумму моментов всех сил относительно оси , которая перпендикулярна плоскости и пересекает ее в точке :

В уравнении (6) моменты сил , и  , линии действия которых проходят через точку (или пересекают ось ), равны нулю.
, линии действия которых проходят через точку (или пересекают ось ), равны нулю.
Из уравнения (3) находим, что 
Поскольку плита прямоугольная, то проекции отрезка  на координатные плоскости и соответственно равны
на координатные плоскости и соответственно равны


Перепишем составленную систему уравнений с учетом выражений для составляющих реакции :

Решив систему в обратном порядке получим:

Ответ: 

Произвольная пространственная система сил и условия ее равновесия
Необходимым и достаточным условием равновесия системы пар сил, приложенных к твердому телу, является равенство нулю суммы моментов данных пар. В пространственном случае расположения пар.
Лемма о параллельном переносе линии действия сил
Лемма. Не меняя статического состояния твердого тела, силу, приложенную к этому
телу, можно перенести в любую его точку параллельно самой себе, добавляя при этом присоединенную пару. Момент присоединенной пары равен моменту этой силы относительно центра приведения.
Доказательство. Пусть к твердому телу в точке А приложена силу  (рис. 3.1).
(рис. 3.1).
В произвольной точке О этого же тела приложим две взаимно уравновешенные силы  и
и  модули которых
модули которых  а линии их действия параллельные силе
а линии их действия параллельные силе  . Тогда сила
. Тогда сила  эквивалентна системе сил
эквивалентна системе сил  Однако силы
Однако силы  составляют пару. Поэтому сила
составляют пару. Поэтому сила  эквивалентна силе
эквивалентна силе  приложенной в точке О, и паре сил
приложенной в точке О, и паре сил  с моментом, который
с моментом, который
равен моменту силы  относительно точки О. Полученную таким образом пару сил
относительно точки О. Полученную таким образом пару сил
 назовем присоединенной паром. Лемму доказано.
назовем присоединенной паром. Лемму доказано.
Главный вектор и главный момент сил. Основная теорема статики
Пусть задано произвольную систему сил  , действующих на твердое тело. Главным вектором
, действующих на твердое тело. Главным вектором  этой системы сил называется векторная сумма всех сил, входящих в
этой системы сил называется векторная сумма всех сил, входящих в
систему:
 (3.1)
(3.1)
Главным моментом такой системы сил относительно точки О (центра сведения) называется векторная сумма моментов всех сил, которые входят в систему, относительно того же
центра:
 (3.2)
(3.2)
где r — радиус-вектор, проведенный из центра О в точку приложения силы Ft. Проектируя левые и правые части выражений (3.1) и (3.2) на оси декартовой системы координат
Oxyz, легко найти аналитические выражения для главного вектора и главного момента
в виде
 (3.3)
(3.3)
 (3.4)
(3.4)
где  и
и  — проекции соответственно главного вектора
— проекции соответственно главного вектора  и главного момента
и главного момента  на оси координат.
на оси координат.


Тогда модули и направляющие косинусы главного вектора и главного момента определяются выражениями
 (3.5)
(3.5)
 (3.6)
(3.6)
Пользуясь леммой о параллельном перенос силы, докажем основную теорему статики.
Основная теорема статики
Произвольную систему сил, которые действуют на твёрдое тело, можно заменить одной из эквивалентных систем, которая:
1) состоит из одной силы, приложенной в произвольно выбранном центре сведения и
равна главному вектору этой системы сил, и присоединенной пары сил, момент которой равен главному моменту всех сил относительно выбранного центра сведения;
2) состоит из двух, в общем случае, скрещивающихся сил, одна из которых приложена в центре сведения, а другая — в определенной точке.
Если ограничиться первой частью сформулированной теоремы, то придем к известной теореме Луи Пуансо.
Доказательство. Для доказательства первой части теоремы рассмотрим произвольную систему сил  (рис. 3.2).
(рис. 3.2).
Произвольную точку О возьмем за центр сведения. По доказанной в п. 3.1 лемме перенесем все силы  в точку О. В результате система сил
в точку О. В результате система сил  окажется эквивалентной системе сил, приложенных в точке О (рис. 3.3, а), и присоединенным парам сил
окажется эквивалентной системе сил, приложенных в точке О (рис. 3.3, а), и присоединенным парам сил
 (рис. 3.1), моменты которых
(рис. 3.1), моменты которых 
 (рис. 3.3, б) имеют вид
(рис. 3.3, б) имеют вид
 (3.7)
(3.7)
Определяя теперь равнодействующую полученной сходящейся системы сил в точке О (рис. 3.3), а также результирующую пару для системы присоединенных пар, получим выражения




 (3.8)
(3.8)
что, согласно (3.1) и (3.2), являются соответственно главным вектором и главным моментом.
Для доказательства второй части теоремы допустим, что заданная система сил эквивалентно преобразована в соответствии с первым утверждение теоремы. Пусть  — главный вектор системы, а
— главный вектор системы, а  — ее главный момент в центре сведения А. Представим момент М0 соответствующей парой сил
— ее главный момент в центре сведения А. Представим момент М0 соответствующей парой сил  (рис. 3.4). Пусть
(рис. 3.4). Пусть  — произвольно выбранное плечо этой пары. Составляя силы
— произвольно выбранное плечо этой пары. Составляя силы  и
и  , приложенные в точке В, по правилу параллелограмма, получим новую систему сил
, приложенные в точке В, по правилу параллелограмма, получим новую систему сил  , эквивалентную системе сил
, эквивалентную системе сил  . Поскольку в общем случае сила
. Поскольку в общем случае сила  не принадлежит плоскости N, то и сила
не принадлежит плоскости N, то и сила  также ей не принадлежит. Итак, силы
также ей не принадлежит. Итак, силы  и
и  * по построению являются скрещивающимися.
* по построению являются скрещивающимися.
Таким образом доказано, что заданная система сил  ) может быть преобразована в эквивалентную ей систему из двух, в общем случае, скрещивающихся сил и *одна из которых (Q) приложена в центре сведения О, а другая — в точке А, положение которой устанавливается выбором плеча h по равенству
) может быть преобразована в эквивалентную ей систему из двух, в общем случае, скрещивающихся сил и *одна из которых (Q) приложена в центре сведения О, а другая — в точке А, положение которой устанавливается выбором плеча h по равенству 

При приведенных преобразованиях этой системы сил главный вектор и главный момент имели формальное значение. Однако следует помнить, что в ряде практических применений эти величины могут быть определены экспериментально. Известно, например, что при вращении ротора электрической машины практически невозможно определить силы, которые возникают в шарикоподшипниковых опорах, а также электромагнитные силы взаимодействия между статором и ротором. В то же время экспериментальное определение главного момента таких сил на валу двигателя не вызывает затруднений. Именно поэтому в характеристику электродвигателей входят не силы, а крутящий момент.
Условия равновесия произвольной пространственной системы сил
Пусть задано произвольную пространственную систему сил  приложенных к
приложенных к
твердому телу. Докажем следующую теорему.
Теорема. Для того чтобы произвольная пространственная система сил была в равновесии (эквивалентная нулю), необходимо и достаточно, чтобы главный вектор и главный момент этой системы относительно произвольного центра сведения были равны нулю, то есть:
 (3.9)
(3.9)
Доказательство. Необходимое условие. Пусть задана система сил  находится в равновесии. Нужно доказать, что тогда выполняются математические условия (3.9). По второму утверждению основной теоремы статики, превращаем заданную систему сил в эквивалентную ей систему, состоящую из двух сил
находится в равновесии. Нужно доказать, что тогда выполняются математические условия (3.9). По второму утверждению основной теоремы статики, превращаем заданную систему сил в эквивалентную ей систему, состоящую из двух сил  , которые могут быть скрещивающимися. Поскольку система сил
, которые могут быть скрещивающимися. Поскольку система сил  находится в равновесии и эквивалентна системе сил
находится в равновесии и эквивалентна системе сил  , то эта система также должна быть в равновесии. Это, в свою очередь, возможно только тогда, когда выполняются все условия аксиомы о двух силах (силы
, то эта система также должна быть в равновесии. Это, в свою очередь, возможно только тогда, когда выполняются все условия аксиомы о двух силах (силы  и
и  должны быть одинаковые по величине, противоположно направлены и иметь общую линию действия). Однако для такой системы ее главный вектор и главный момент относительно любого центра возведения очевидно равны нулю, что и требовалось доказать.
должны быть одинаковые по величине, противоположно направлены и иметь общую линию действия). Однако для такой системы ее главный вектор и главный момент относительно любого центра возведения очевидно равны нулю, что и требовалось доказать.
Достаточное условие. Пусть задана система сил  преобразована в эквивалентную систему
преобразована в эквивалентную систему  для которой условия (3.9) имеют вид:
для которой условия (3.9) имеют вид:
 (3.10)
(3.10)
Выполнение первого условия означает, что силы  и
и  равны по величине и противоположно направлены. Выполнение второго условия показывает, что эти силы имеют общую линию действия, поскольку момент пары сил и равен нулю. Итак, согласно аксиоме I о двух силах, исходная система сил эквивалентна нулю. Условия (3.9) называются условиями равновесия произвольной системы сил в векторной (геометрической) форме. Проектируя векторные равенства (3.9) на оси координат, получаем условия равновесия свободной пространственной системы сил в аналитической форме:
равны по величине и противоположно направлены. Выполнение второго условия показывает, что эти силы имеют общую линию действия, поскольку момент пары сил и равен нулю. Итак, согласно аксиоме I о двух силах, исходная система сил эквивалентна нулю. Условия (3.9) называются условиями равновесия произвольной системы сил в векторной (геометрической) форме. Проектируя векторные равенства (3.9) на оси координат, получаем условия равновесия свободной пространственной системы сил в аналитической форме:
 (3.11)
(3.11)
Итак, для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на координатные оси и суммы моментов этих сил относительно осей координат были равны нулю. Таким образом, при решении задач о равновесии пространственной системы сил, приложенных к твердому телу, из уравнений (3.11) можно определить шесть неизвестных величин. Если на твердое тело действует система пар сил, то необходимое и достаточное условие равновесия такой системы, как следует из условия (3.9) и свойств пар сил, принимает вид:
 (3.12)
(3.12)
Итак, для равновесия пар сил необходимо и достаточно, чтобы геометрическая сумма моментов пар была равна нулю:


Пример 1. На горизонтальный вал (рис. 3.5), который лежит в подшипниках А и В, действует груз весом  , который привязан тросом к шкиву С радиусом
, который привязан тросом к шкиву С радиусом Груз весом
Груз весом  насаженный на стержень
насаженный на стержень  , неизменно связанный с валом АВ. Даны размеры АС = 0,2 м, CD = 0,7 м, BD — 0,1 м. В состоянии равновесия стержень ED отклонен от вертикали на угол 30 °. Определить расстояние l центра тяжести груза весом Р от оси вала АВ, а также реакции подшипников А и В.
, неизменно связанный с валом АВ. Даны размеры АС = 0,2 м, CD = 0,7 м, BD — 0,1 м. В состоянии равновесия стержень ED отклонен от вертикали на угол 30 °. Определить расстояние l центра тяжести груза весом Р от оси вала АВ, а также реакции подшипников А и В.
Решение. Рассмотрим равновесие вала, на который действуют активные силы  и
и  . Cвязями для него являются подшипники А и В. Согласно аксиоме о связях, освобождаем вал от связей и заменяем их реакциями
. Cвязями для него являются подшипники А и В. Согласно аксиоме о связях, освобождаем вал от связей и заменяем их реакциями  и
и  , лежащие в плоскостях, перпендикулярных к оси подшипников А и В. Возьмем систему координат, как показано на рис. 3.5. Неизвестные реакции и подадим в виде составляющих
, лежащие в плоскостях, перпендикулярных к оси подшипников А и В. Возьмем систему координат, как показано на рис. 3.5. Неизвестные реакции и подадим в виде составляющих  ,
, (рис. С 5), которые надо определить. Для решения задачи воспользуемся условиями равновесия (3.11). В этом случае второе условие выполняется тождественно, поскольку проекции всех сил, в том числе и реакций связей, на ось Ау равны нулю. Из пяти условий равновесия которые остались следует определить пять неизвестных величин:
(рис. С 5), которые надо определить. Для решения задачи воспользуемся условиями равновесия (3.11). В этом случае второе условие выполняется тождественно, поскольку проекции всех сил, в том числе и реакций связей, на ось Ау равны нулю. Из пяти условий равновесия которые остались следует определить пять неизвестных величин: 
 Задача статически определена.
Задача статически определена.
По заданной задачи условия равновесия (3.11) имеют вид:

Откуда,

Условия равновесия системы сил в отдельных случаях
Условия равновесия пространственной системы параллельных сил. Рассмотрим частный случай, когда все силы, действующие на твердое тело, параллельные между собой (рис. 3.6).

В этом случае можно направить одну из координатных осей (например, ось Oz) параллельно этим силам. Тогда из условий равновесия (3.11) останутся только три уравнения, а три превратятся в тождества. Действительно, проекции сил  на оси Ох и Оу равны нулю. Поскольку силы параллельные оси Oz, то их моменты относительно оси Oz также равны нулю. Тогда из шести уравнений (3.11) остаются только три:
на оси Ох и Оу равны нулю. Поскольку силы параллельные оси Oz, то их моменты относительно оси Oz также равны нулю. Тогда из шести уравнений (3.11) остаются только три:
 (3.13)
(3.13)
Итак, для равновесия пространственной системы параллельных сил необходимо и достаточно, чтобы алгебраическая сумма проекций всех сил на ось, параллельную силам, была равна нулю, и алгебраические суммы моментов этих сил относительно двух других координатных осей были равны нулю. Отметим, что для статической определенности задач, которые решаются, число неизвестных в уравнениях (3.13) не должно превышать
трех.
Условия равновесия твердого тела с неподвижной точкой
Рассмотрим твердое тело, которое имеет неподвижную точку О (рис. 3.7). Пусть к этому телу приложена пространственная система активных сил 
Точку О возьмем за начало координат. Сведя систему активных (или заданных) сил к центру сведения В, найдем главный вектор:

и главный момент активных сил

Главный вектор активных сил уравновесится реакцией неподвижной точки О, а главный момент активных сил  в случае равновесия тела должен быть равен нулю:
в случае равновесия тела должен быть равен нулю:
 (3.14)
(3.14)

В проекциях на оси координат это условие примет вид:
 (3.15)
(3.15)
Эти уравнения не имеют реакций связей (неподвижной точки О). Они являются условиями равновесия твердого тела с неподвижной точкой.
Итак, для равновесия твердого тела с неподвижной точкой нужно, чтобы алгебраическая сумма моментов активных сил относительно каждой из трех взаимно перпендикулярных осей, проходящих через эту точку, была равна нулю. Если надо найти реакцию опоры, то, воспользовавшись аксиомой об освобождении от связей, заменим связь реакцией и, записав первые три уравнения (3.11), найдем проекции реакции на оси, а затем по формулам (3.5) — их величину и направление.
Условия равновесия твердого тела, имеющего две неподвижные точки или неподвижную ось
Представим себе твердое тело, две точки которого  , и
, и  закреплены неподвижно. Пусть к этому телу приложены активные силы
закреплены неподвижно. Пусть к этому телу приложены активные силы  (рис. 3.8).
(рис. 3.8).

Нужно найти условия, которым бы удовлетворяли приложенные силы  чтобы тело было в равновесии. Освободив тело от связей, приложим к нему реакции
чтобы тело было в равновесии. Освободив тело от связей, приложим к нему реакции  в неподвижных точках , и . Поскольку направления реакций неизвестны, то их нужно разложить по направлениям трех взаимно перпендикулярных осей (рис. 3.8). Под действием всех этих сил
в неподвижных точках , и . Поскольку направления реакций неизвестны, то их нужно разложить по направлениям трех взаимно перпендикулярных осей (рис. 3.8). Под действием всех этих сил  твердое тело будет оставаться в равновесии, если они удовлетворяют шесть уравнений (3.11) равновесия твердого тела, которых при
твердое тело будет оставаться в равновесии, если они удовлетворяют шесть уравнений (3.11) равновесия твердого тела, которых при  будут иметь вид:
будут иметь вид:
 (3.16)
(3.16)
Как видим, только последнее уравнение не имеет реакций  точек закрепления тела и, следовательно, является единственным условием, которое удовлетворяют активные силы
точек закрепления тела и, следовательно, является единственным условием, которое удовлетворяют активные силы  чтобы твердое тело, которое рассматривается, оставалось в равновесии. Итак, для равновесия твердого тела с двумя неподвижными точками (или закрепленной осью) нужно, чтобы алгебраическая сумма моментов активных сил относительно закрепленной оси или оси вращения была равна нулю:
чтобы твердое тело, которое рассматривается, оставалось в равновесии. Итак, для равновесия твердого тела с двумя неподвижными точками (или закрепленной осью) нужно, чтобы алгебраическая сумма моментов активных сил относительно закрепленной оси или оси вращения была равна нулю:
 (3.17)
(3.17)
Для определения реакций связей в этом случае осталось пять уравнений, а неизвестных составляющих реакций шесть. Из пяти уравнений нельзя определить шесть неизвестных. Поэтому задача об определении реакций двух закрепленных точек тела оказывается статически неопределенной. Эта неопределенность исчезает, если, например, в опоре  , устроить подпятник, а в опоре
, устроить подпятник, а в опоре  — подшипник, поскольку реакция подпятника определяется тремя составляющими
— подшипник, поскольку реакция подпятника определяется тремя составляющими  , а реакция подшипника — двумя составляющими
, а реакция подшипника — двумя составляющими 
Условия равновесия произвольной плоской системы сил
Пусть система сил заданная в плоскости
заданная в плоскости  (рис. 3.9). Центром сведения возьмем произвольную точку О, которая лежит в этой плоскости. Очевидно, что главный момент этой системы сил перпендикулярен плоскости, в которой лежат силы. Главный вектор заданной системы сил лежит в плоскости действия сил. Итак, из шести уравнений равновесия (3.11) остается только три:
(рис. 3.9). Центром сведения возьмем произвольную точку О, которая лежит в этой плоскости. Очевидно, что главный момент этой системы сил перпендикулярен плоскости, в которой лежат силы. Главный вектор заданной системы сил лежит в плоскости действия сил. Итак, из шести уравнений равновесия (3.11) остается только три:
 (3.18)
(3.18)

Таким образом, для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы алгебраические суммы проекций сил на две взаимно перпендикулярные оси, и алгебраическая сумма моментов сил относительно произвольно выбранной точки были равны нулю. Поскольку условия равновесия (3.18) в этом случае записываются тремя уравнениями, то задача будет статически определенной, если число неизвестных в уравнениях равновесия не будет превышать трех. Уравнения равновесия можно представить в виде:
 (3.19)
(3.19)
при условии, что ось  не перпендикулярна отрезку АВ. Наконец, все три уравнения равновесия можно представить в виде уравнений моментов сил относительно трех точек О, А и В (рис. 3.9), не лежащих на одной прямой:
не перпендикулярна отрезку АВ. Наконец, все три уравнения равновесия можно представить в виде уравнений моментов сил относительно трех точек О, А и В (рис. 3.9), не лежащих на одной прямой:
 (3.20)
(3.20)
Уравнениями (3.20) равновесия плоской системы сил пользуются при определении усилий в стержнях по способу Риттера. В заключение этого раздела отметим, что за центр моментов целесообразно взять точку, в которой пересекается большое количество линий действия неизвестных сил. Если две неизвестные силы взаимно перпендикулярны, то оси координат целесообразно направлять по линиям действия этих сил.

Пример 2. К балке АВ, опорами которой являются шарнир А и каток В, приложенные силы, как показано на рис. 3.10. Определить реакцию шарнира  и реакцию катка
и реакцию катка  если
если 


Решение. Рассмотрим равновесие балки. По аксиоме об освобождении от связей, заменим действие связей (шарнира А и катка В) их реакциями. Реакция  катка направлена по нормали к опорной плоскости. Направление реакции шарнира А неизвестно. Разложим эту реакцию на составляющие
катка направлена по нормали к опорной плоскости. Направление реакции шарнира А неизвестно. Разложим эту реакцию на составляющие  и
и  . Точку А возьмем за начало координат. Уравнение равновесия в этом случае будут вид:
. Точку А возьмем за начало координат. Уравнение равновесия в этом случае будут вид:

Откуда

Окончательно получим: 
Условия равновесия параллельных сил, которые лежат в плоскости
Пусть к твердому телу приложена система параллельных сил, которые лежат в одной плоскости (рис. 3.11). Обозначим эту плоскость  . Поскольку параллельные силы являются частным случаем произвольной плоской системы сил, то на основе (3.18) установим условия равновесия параллельных сил, лежащих в одной плоскости и параллельные оси
. Поскольку параллельные силы являются частным случаем произвольной плоской системы сил, то на основе (3.18) установим условия равновесия параллельных сил, лежащих в одной плоскости и параллельные оси 
В этом случае проекции всех сил на ось  равны нулю, поэтому с трех условий (3.18) остаются два условия равновесия:
равны нулю, поэтому с трех условий (3.18) остаются два условия равновесия:
 (3.21)
(3.21)
Итак, для равновесия параллельных сил, лежащих в плоскости, необходимо и достаточно, чтобы алгебраическая сумма проекций сил на ось, параллельную им, а также алгебраическая сумма моментов сил относительно некоторой точки на плоскости, были равны нулю. Отметим, что уравнением равновесия параллельных сил, которые лежат в плоскости, можно предоставить в другой форме, составив уравнение моментов сил относительно двух точек А и В:
 (3.22)
(3.22)
причем точки А и В не должны лежать на прямой, параллельной оси  .
.
Для статической определенности задачи число неизвестных, в случае воздействия на твердое тело параллельных сил на плоскости, не должно превышать двух.


Пример 3. В балки АВ длиной 10 м приложены параллельные силы, как показано на рис. 3.12;  силы
силы 
 Определить реакцию шарнира
Определить реакцию шарнира  и реакцию катка
и реакцию катка 
Решение. Рассмотрим равновесие балки, освободив ее от связей, и заменив их действия реакциями связей. В катке В реакция направлена перпендикулярно к балке (рис. 3.12). реакция шарнира в этом случае, исходя из равновесия системы параллельных сил, будет параллельной этим силам. Точку А возьмем за начало координат. Из условий равновесия (3.21) получим:

Откуда

Эту задачу можно решить, составив два уравнение моментов сил относительно точек А и В.
Трение качения. Равновесие при наличии сил трения
Кроме трения скольжения, приведенного в п. 1.7, рассмотрим еще один вид трения, возникающая при качении тел (трение качения).
В теоретической механике трением качения интересуются только с точки зрения определения реакций опоры (более полное его изучение выходит за рамки механики твердого тела). Пусть к катку радиусом  перпендикулярно к его оси
перпендикулярно к его оси  приложена горизонтальная сила
приложена горизонтальная сила  (рис. 3.13).
(рис. 3.13).

Кроме того, на каток действует сила тяжести  . Вследствие деформаций катка и горизонтальной опоры поверхности, на которой находится каток, они касаются друг друга не в одной точке, а по некоторой области контакта. Нормальная реакция опоры
. Вследствие деформаций катка и горизонтальной опоры поверхности, на которой находится каток, они касаются друг друга не в одной точке, а по некоторой области контакта. Нормальная реакция опоры  сместится на определенное расстояние
сместится на определенное расстояние 
Сила трения  возникает в том месте, где каток касается опорной поверхности, то есть в точке С. В случае равновесия катка сила
возникает в том месте, где каток касается опорной поверхности, то есть в точке С. В случае равновесия катка сила  равна по модулю силе
равна по модулю силе  , но направлена в противоположную сторону. Итак,
, но направлена в противоположную сторону. Итак,  и
и  образуют пару сил, которая уравновешивается парой сил
образуют пару сил, которая уравновешивается парой сил  и
и  (рис. 3.13). момент пары
(рис. 3.13). момент пары  называется моментом трения качения. Плечо этой пары — величина
называется моментом трения качения. Плечо этой пары — величина  , которая называется коэффициентом трения качения. В отличие от коэффициента трения скольжения, который является безразмерной величиной, коэффициент трения качения имеет размерность длины. Приравняв моменты указанных пар:
, которая называется коэффициентом трения качения. В отличие от коэффициента трения скольжения, который является безразмерной величиной, коэффициент трения качения имеет размерность длины. Приравняв моменты указанных пар:
 (3.23)
(3.23)
найдем выражение для определения коэффициента трения-качения 
 (3.24)
(3.24)
Опыт показывает, что величина b пропорциональна радиусу цилиндра (катка) и разная для разных материалов. Очевидно, тело будет в равновесии, если момент активной силы в отношении точки С не больше момента трения, то есть 
Наличие трения не меняет методику решения задач статики. Реакции связей при наличии трения скольжения определяют по формулами п. 1.7, а в случае трения качения — по формулам (3.23), (3.24).
Пример 4. Лестница АВ опирается на шероховатую стену и шероховатую пол, образуя с полом угол 60 ° (рис. 3.14). На лестнице в точке D содержится груз весом  . Пренебрегая весом лестницы, определить расстояние BD, при которой лестница будет в равновесии. Угол трения для стены и пола равен 15 °.
. Пренебрегая весом лестницы, определить расстояние BD, при которой лестница будет в равновесии. Угол трения для стены и пола равен 15 °.
Решение. Рассмотрим равновесие лестницы, к которой в точке D приложена сила . Согласно аксиоме III, освобождаемся от связей, заменяя их действия силами, равными реакциям связей. Поскольку стена и пол шершавые, то реакции в опорах А и В состоят из сил трения и нормальных составляющих реакций. Система сил, которая рассматривается, — плоская, поэтому составим три уравнения равновесия, взяв точку О за начало координат, а координатные оси  и
и  направим так, как показано на рисунке:
направим так, как показано на рисунке:




Воспользовавшись соотношениями с п.1.7, выразим силы трения  и
и  через нормальные реакции, учитывая, что угол трения
через нормальные реакции, учитывая, что угол трения 

С учетом этих соотношений условия равновесия будут иметь следующий вид:

Разделив третье уравнение на  получим:
получим:

Пространственная система произвольных сил
Пространственная система сил, это в которой линии действия составляющих сил расположены произвольно, т. е. линии их действия могут не пересекаться и находиться в разных плоскостях, называется произвольно расположенной системой сил.
Пары сил в пространстве
Как известно, пары сил характеризуются тремя параметрами: модулем, равна произведению одной из сил пары на плечо пары, плоскостью действия пары и направлением вращения тела в этой плоскости. если рассматривать пары, которые не лежат в одной плоскости, то для каждой из них необходимо определить эти параметры.
Теорема о переносе пары в параллельную плоскость
Не меняя действия пары сил на тело, можно переносить эту пару в параллельную плоскость.
Докажем это.
Предположим, что есть тело, к которому в плоскости π приложена пара сил
( ,
,  ) (рис. 1.46). При этом P1 = P2 и //. Обозначим точки приложения сил и буквами A и B. Возьмем на теле другую плоскость π1, которая будет параллельной данной плоскости π. Отрезок AB перенесем параллельно самому себе в плоскость π1 в положение A1B1. Приложим в точках A1 и B1 уравновешенные системы сил
) (рис. 1.46). При этом P1 = P2 и //. Обозначим точки приложения сил и буквами A и B. Возьмем на теле другую плоскость π1, которая будет параллельной данной плоскости π. Отрезок AB перенесем параллельно самому себе в плоскость π1 в положение A1B1. Приложим в точках A1 и B1 уравновешенные системы сил  ,
,  и
и  ,
,  , которые в сумме будут эквивалентные нулю. При этом модули всех сил выберем одинаковыми, а именно
, которые в сумме будут эквивалентные нулю. При этом модули всех сил выберем одинаковыми, а именно
= = = = = =  .
.

Соединим все четыре точки и получим параллелограмм AA1B1B (поскольку AB = A1B1 и AB//A1B1 ). Покажем диагонали этого параллелограмма. Они пересекаются в одной точке, которая разделяет каждую диагональ пополам.
Объединим силы и , приложенные на концах первой диагонали и направлены в одну сторону. Поскольку они параллельны и имеют одинаковое направление, то их можно добавить, получив равнодействующую, которая в данном случае будет приложена именно посередине диагонали. То есть
R1 = P2 + P4 = 2P.
Тоже самое сделаем с силами и , получая равнодействующую  , которая
, которая
будет приложена посередине второй диагонали и направлена в ту же сторону, что и эти силы, но будет иметь направление, противоположное направлению первой равнодействующей  . Равнодействующая R2 будет равняться
. Равнодействующая R2 будет равняться
R2 = P1 + P5 = 2P.
Итак, в точке пересечения диагоналей параллелограмма AA1B1B есть две силы и , которые являются уравновешенной системой сил, которую, как это известно, можно
отвергнуть.
На рис. 1.46 остались только силы и , которые, как видим, являются парой сил, которая перенесена и приложена в плоскости π1. Таким образом, пару сил (, ) перенесено из плоскости π в параллельную плоскость π1.
Теорема доказана.
Условия эквивалентности пар в пространстве
Как известно, момент пары сил является векторной величиной. Момент пары как вектор имеет направление, перпендикулярное плоскости, в которой расположена пара сил, и направлен таким образом, что, смотря с конца вектора, можно видеть вращения плоскости против направления часовой стрелки (рис. 1.47). Также было установлено, что пару сил можно передвигать и вращать в плоскости ее действия и переносить в параллельную плоскость, поскольку момент пары сил является вектором свободным. Таким образом, момент пары сил как вектор можно переносить вдоль линии его действия и передвигать параллельно самому себе.
На основании изложенного, можно утверждать, что пары сил в пространстве будут эквивалентными, если их моменты будут равными по величине, параллельными и направленными в одну сторону.

Добавление пар в пространстве
Добавить пару в пространстве значит найти одну такую пару, которая будет
эквивалентной заданной системе пар. А поскольку каждая пара сил характеризуется ее моментом как вектором, то момент эквивалентной пары сил должен равняться геометрической сумме вектор-моментов составляющих пар сил.
Представим тело, к которому приложена система пар сил, произвольно расположенных в пространстве (рис. 1.48). Обозначим векторы этих моментов через  ,
,  ,
,  , …
, …  .
.
Поскольку моменты пар сил являются векторами свободными, то их можно переносить параллельно самим себе в произвольную точку. Если это сделать, то будем иметь систему моментов как систему сходящихся векторов, которую можно геометрически добавить.

Как известно, геометрическое добавления моментов как векторов можно осуществлять по правилу геометрического сложения векторов различной природы (методом силового многоугольника). Векторную сумму можно записать следующим образом:

Таким образом, момент результирующей пары как вектор равен геометрической сумме моментов составляющих пар как векторов.
Условия равновесия системы пар в пространстве
Если на тело действует система пар сил, произвольно расположенных в пространстве, то тело будет в состоянии равновесия только тогда, когда момент результирующей (эквивалентной) пары равен нулю. А поскольку момент результирующей пары определяется как геометрическая сумма моментов составляющих пар, то эта геометрическая сумма тоже должна равняться нулю. Векторно это условие равновесия записывается так:

Таким образом, для равновесия тела, находящегося под действием произвольной
системы пар сил в пространстве, необходимо и достаточно, чтобы геометрическая
сумма моментов составляющих пар равна нулю.
Возведение пространственной системы произвольных сил к данному центра. Главный вектор и главный момент системы
Представим тело, которое находится под действием пространственной системы произвольных сил . , , …,  , приложенных в точках A1, A2, A3, …, An (рис. 1.49). Выберем произвольную точку O как центр сведения и построим пространственную декартову систему координат Oxyz. Последовательно перенесем силы параллельно самим себе в центр O. При этом к телу необходимо добавлять моменты «присоединенных» пар сил, которые равны моментам заданных сил относительно центра O.
, приложенных в точках A1, A2, A3, …, An (рис. 1.49). Выберем произвольную точку O как центр сведения и построим пространственную декартову систему координат Oxyz. Последовательно перенесем силы параллельно самим себе в центр O. При этом к телу необходимо добавлять моменты «присоединенных» пар сил, которые равны моментам заданных сил относительно центра O.
Момент первой пары обозначим = mo (), он приложен в точке O, расположенный перпендикулярно плоскости треугольника OA1P1 и направлен по правилу буравчика.
Тоже самое сделаем и с другими силами, которые приложены к телу. Вследствие этого в центре сведения O получена система сходящихся сил и система моментов пар сил в виде векторов.
Система сходящихся сил . , , …, , приложенных в центре O, можно заменить одной суммарной силой  , называется главным вектором пространственной системы произвольных сил. Моменты , , , … , которые тоже приложенные в центре O, можно заменить одним суммарным моментом
, называется главным вектором пространственной системы произвольных сил. Моменты , , , … , которые тоже приложенные в центре O, можно заменить одним суммарным моментом  , который называется главным моментом пространственной системы произвольных сил.
, который называется главным моментом пространственной системы произвольных сил.

Главный вектор равен геометрической сумме векторов всех сил, приложенных к телу, а главный момент равен геометрической сумме моментов всех сил относительно центра сведения, а именно:

Таким образом, любая пространственная система произвольных сил, действующая на
тело, может быть сведена к одной силе — главного вектора системы и одной паре — главного момента системы пространственных сил.
В общем случае главный вектор не зависит от положения центра возведения O, а главный момент , наоборот, зависит от его положения, так как меняются плечи «присоединенных» пар, или плечи заданных сил относительно центра сводки.
Вычисление главного вектора и главного момента пространственной системы произвольных сил
Определим аналитически главный вектор пространственной системы произвольных сил , через его проекции на оси пространственной системы координат Oxyz. Обозначим эти проекции Rx, Ry, Rz .
Проекция главного вектора на ось равна алгебраической сумме проекций составляющих сил на ту же ось. Аналитически это можно записать так:

То есть, проекции главного вектора пространственной системы произвольных сил на оси пространственной системы координат равны алгебраическим суммам проекций этих сил на соответствующие оси.
Если известны проекции главного вектора R на оси координат, то можно определить его величину, как диагональ параллелепипеда

Проекция главного момента на любую ось равна алгебраической сумме проекций моментов составляющих сил на ту же ось, а именно:

Но проекция момента силы относительно точки на ось, которая проходит через эту точку, равен моменту силы относительно этой оси, то есть:

С учетом уравнения можно окончательно определить проекции вектора главного момента на оси координат. Они будут равны

То есть, проекции главного момента пространственной системы произвольных сил на оси пространственной системы координат равны алгебраическим суммам моментов этих сил относительно соответствующих осей.
Если известны проекции главного момента на оси координат, то нетрудно определить модуль вектора этого момента. Он будет равен:
M =  .
.
Некоторые случаи сведения пространственной системы произвольных сил к данному центру
Напомним о том, что любая пространственная система произвольных сил может быть сведена к одной силе — главному вектору системы и одной пары, момент которой равен главному моменту системы. Но могут быть и некоторые частичные случаи.
1. Главный момент = 0, а главный вектор  ≠ 0. В этом случае главный вектор будет равнодействующей пространственной системы произвольных сил;
≠ 0. В этом случае главный вектор будет равнодействующей пространственной системы произвольных сил;
2. Главный вектор = 0, а главный момент ≠ 0. В данном случае пространственная система произвольных сил сводится к одной паре сил, момент которой равен главному моменту системы. Главный момент не зависит, в этом случае, от изменения положения центра возведения;
3. Главный вектор ≠ 0 и главный момент ≠ 0, но вектор перпендикулярен вектору . Это означает, что главный момент как пара сил расположен в той же плоскости, в которой лежит и главный вектор. А это дает возможность два вектора и заменить одним вектором — равнодействующей, не будет проходить через центр сведения O. Это можно доказать следующим образом. Предположим, что к телу в точке O приложены
главный вектор и главный момент , угол между которыми составляет 90º (рис. 1.50). Главный вектор заменяем парой сил ( ;
;  ), (причем модули сил , и однаковы) с плечом h =
), (причем модули сил , и однаковы) с плечом h =  . Теперь будем иметь приложенными в точке O равные и противоположно направленные силы и и прилагаемую в точке A силу . Силы и образуют уравновешенную систему сил, которую можно отбросить, а в точке A остается сила , которая, фактически, является равнодействующей силой .
. Теперь будем иметь приложенными в точке O равные и противоположно направленные силы и и прилагаемую в точке A силу . Силы и образуют уравновешенную систему сил, которую можно отбросить, а в точке A остается сила , которая, фактически, является равнодействующей силой .

4. Главный вектор и главный момент не равен нулю, но они параллельны. В этом случае, который носит название «динами» или «силового винта», тело совершает винтовое движение, поскольку в направлении главного вектора оно «движется» поступательно и одновременно вращается под действием пара в плоскости, перпендикулярной направлению движения (рис. 1.51). Ось, на которой расположены векторы и и которая проходит через центр сведения O, называется — «ось динами».

5. Главный вектор ≠ 0 и главный момент ≠ 0 и произвольно расположены в пространстве (векторы и не перпендикулярны друг другу и не параллельны). В данном случае пространственная система произвольных векторов также сводится к «динами», но ось динами уже не будет проходить сквозь центр сведения O. Докажем это. Представим в центре сведения O приложен главный вектор и главный момент , угол между которыми составляет α (рис. 1.52). Разложим главный момент на два направления —  , направленный вдоль главного вектора , и
, направленный вдоль главного вектора , и  , который является
, который является
перпендикулярным к . Проекции главного момента на эти направления будут равны = M cosα и = M sinα. Теперь, как и в случае, когда главный вектор и главный момент были перпендикулярны, представим момент в виде пары (; ) с плечом h =  . Также
. Также
отвергаем силы и , что были приложены в центре сведения O. Остается приложенной в точке A сила , которая является главным вектором , и момент , вектор которого приложен в центре сведения O. Однако известно, что вектор , как вектор свободный, можно перенести в точку A. Таким образом, заданная пространственная система произвольных сил также сведена к «динами», но теперь ось «динами» проходит через точку A.
6. Главный вектор = 0 и главный момент = 0. В данном случае пространственная система произвольных сил будет находиться в состоянии равновесия.

Услуги по теоретической механике:
- Заказать теоретическую механику
- Помощь по теоретической механике
- Заказать контрольную работу по теоретической механике
Учебные лекции:
- Статика
- Система сходящихся сил
- Момент силы
- Пара сил
- Произвольная система сил
- Плоская произвольная система сил
- Трение
- Расчет ферм
- Расчет усилий в стержнях фермы
- Пространственная система сил
- Плоская система сходящихся сил
- Пространственная система сходящихся сил
- Равновесие тела под действием пространственной системы сил
- Естественный способ задания движения точки
- Центр параллельных сил
- Параллельные силы
- Система произвольно расположенных сил
- Сосредоточенные силы и распределенные нагрузки
- Кинематика
- Кинематика твердого тела
- Движения твердого тела
- Динамика материальной точки
- Динамика механической системы
- Динамика плоского движения твердого тела
- Динамика относительного движения материальной точки
- Динамика твердого тела
- Кинематика простейших движений твердого тела
- Общее уравнение динамики
- Работа и мощность силы
- Обратная задача динамики
- Поступательное и вращательное движение твердого тела
- Плоскопараллельное (плоское) движение твёрдого тела
- Сферическое движение твёрдого тела
- Движение свободного твердого тела
- Сложное движение твердого тела
- Сложное движение точки
- Плоское движение тела
- Статика твердого тела
- Равновесие составной конструкции
- Равновесие с учетом сил трения
- Центр масс
- Колебания материальной точки
- Относительное движение материальной точки
- Статические инварианты
- Дифференциальные уравнения движения точки под действием центральной силы и их анализ
- Динамика системы материальных точек
- Общие теоремы динамики
- Теорема об изменении кинетической энергии
- Теорема о конечном перемещении плоской фигуры
- Потенциальное силовое поле
- Метод кинетостатики
- Вращения твердого тела вокруг неподвижной точки