Закон Гука

4.3
Средняя оценка: 4.3
Всего получено оценок: 764.
4.3
Средняя оценка: 4.3
Всего получено оценок: 764.
Закон Гука был открыт в XVII веке англичанином Робертом Гуком. Это открытие о растяжении пружины является одним из законов теории упругости и выполняет важную роль в науке и технике.
Определение и формула закона Гука
Формулировка этого закона выглядит следующим образом: сила упругости, которая появляется в момент деформации тела, пропорциональна удлинению тела и направлена противоположно движению частиц этого тела относительно других частиц при деформации.
Математическая запись закона выглядит так:
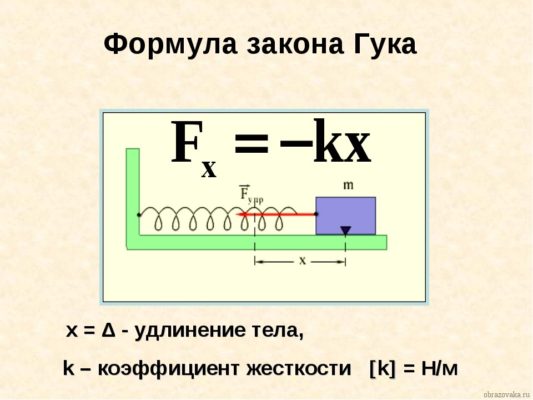
где Fупр – соответственно сила упругости, x – удлинение тела (расстояние, на которое изменяется исходная длина тела), а k – коэффициент пропорциональности, называемый жесткостью тела. Сила измеряется в Ньютонах, а удлинение тела – в метрах.
Для раскрытия физического смысла жесткости, нужно в формулу для закона Гука подставить единицу, в которой измеряется удлинение – 1 м, заранее получив выражение для k.
Эта формула показывает, что жесткость тела численно равна силе упругости, которая возникает в теле (пружине), когда оно деформируется на 1 м. Известно, что жесткость пружины зависит от ее формы, размера и материала, из которого произведено данное тело.
Сила упругости
Теперь, когда известно, какая формула выражает закон Гука, необходимо разобраться в его основной величине. Основной величиной является сила упругости. Она появляется в определенный момент, когда тело начинает деформироваться, например, когда пружина сжимается или растягивается. Она направлена в обратную сторону от силы тяжести. Когда сила упругости и сила тяжести, действующие на тело, становятся равными, опора и тело останавливаются.
Деформация – это необратимые изменения, происходящие с размерами тела и его формой. Они связанны с перемещением частиц относительно друг друга. Если человек сядет в мягкое кресло, то с креслом произойдет деформация, то есть изменятся его характеристики. Она бывает разных типов: изгиб, растяжение, сжатие, сдвиг, кручение.
Так как сила упругости относится по своему происхождению к электромагнитным силам, следует знать, что возникает она из-за того, что молекулы и атомы – наименьшие частицы, из которых состоят все тела, притягиваются друг другу и отталкиваются друг от друга. Если расстояние между частицами очень мало, значит, на них влияет сила отталкивания. Если же это расстояние увеличить, то на них будет действовать сила притяжения. Таким образом, разность сил притяжения и сил отталкивания проявляется в силах упругости.
Сила упругости включает в себя силу реакции опоры и вес тела. Сила реакции представляет особый интерес. Это такая сила, которая действует на тело, когда его кладут на какую-либо поверхность. Если же тело подвешено, то силу, действующую на него, называют, силой натяжения нити.
Особенности сил упругости
Как мы уже выяснили, сила упругости возникает при деформации, и направлена она на восстановление первоначальных форм и размеров строго перпендикулярно к деформируемой поверхности. У сил упругости также есть ряд особенностей.
- они возникают во время деформации;
- они появляются у двух деформируемых тел одновременно;
- они находятся перпендикулярно поверхности, по отношению к которой тело деформируется.
- они противоположны по направлению смещению частиц тела.
Применение закона на практике
Закон Гука применяется как в технических и высокотехнологичных устройствах, так и в самой природе. Например, силы упругости встречаются в часовых механизмах, в амортизаторах на транспорте, в канатах, резинках и даже в человеческих костях. Принцип закона Гука лежит в основе динамометра – прибора, с помощью которого измеряют силу.


Что мы узнали?
Статья подробно знакомит учащихся с материалом о том, как формулируется обобщенный закон Гука, который изучают в 7 классе, и его основной величине – силе упругости.
Тест по теме
Доска почёта
Чтобы попасть сюда — пройдите тест.
-

Тимур Катаев
10/10
-
Влад Демченко
7/10
-
Александр Коновалов
10/10
-
Октябрина Баева
10/10
-
Киара Кольт
8/10
-
Алина Фесова
9/10
-
Яніна Резніченко
8/10
-
Артемий Здор
8/10
-
Александра Щербина
9/10
-
Катя Пу
10/10
Оценка доклада
4.3
Средняя оценка: 4.3
Всего получено оценок: 764.
А какая ваша оценка?
Сила упругости широко используется в технике. Эта сила возникает в упругих телах при их деформации. Деформация – это изменение формы тела, под действием приложенных сил.
Виды деформации
Деформация – это изменение формы, или размеров тела.
Есть несколько видов деформации:
- сдвиг;
- кручение;
- изгиб;
- сжатие/растяжение;
Деформация сдвига возникает, когда одни части тела сдвигаются относительно других его частей. Если подействовать на верхнюю часть картонного ящика, наполненного различными предметами, горизонтальной силой, то вызовем сдвиг верхней части ящика относительно его нижней части.
Сжатие или растяжение легко представить на примере прямоугольного куска тонкой резины. Такая деформация используется, к примеру, в резинках для одежды.
Примеры изгиба и кручения показаны на рисунке 1. Пластиковая линейка, деформированная изгибом, представлена на рис. 1а, а на рисунке 1б – эта же линейка, деформируемая кручением.

Рис. 1. пластиковая линейка, деформированная изгибом – а) и кручением – б)
В деформируемом теле возникают силы, имеющие электромагнитную природу и препятствующие деформации.
Растяжение пружины
Рассмотрим подробнее деформацию растяжения на примере пружины.
Давайте прикрепим пружину к некоторой поверхности (рис. 2). На рисунке слева указана начальная длина (L_{0}) пружины.

Рис. 2. Сравнивая длину свободной пружины с длиной нагруженной, можно найти ее удлинение
Подвесим теперь к пружине груз. Пружина будет иметь длину (L), указанную на рисунке справа.
Сравним длину нагруженной пружины с длиной свободно висящей пружины.
[ large L_{0} + Delta L = L ]
Найдем разницу (разность) между длинами свободно висящей пружины и пружины с грузом. Вычтем для этого из обеих частей этого уравнения величину (L_{0}).
[ large boxed{ Delta L = L — L_{0} }]
( L_{0} left(text{м} right) ) – начальная длина пружины;
( L left(text{м} right) ) – конечная длина растянутой пружины;
( Delta L left(text{м} right) ) – кусочек длины, на который растянули пружину;
Величину ( Delta L ) называют удлинением пружины.
Иногда рассчитывают относительное удлинение. Это относительное удлинение часто выражают десятичной дробью. Или дробью, в знаменателе которой находится число 100 — такую дробь называют процентом.
Примечание: Отношение – это дробь. Относительное – значит, дробное.
[ large boxed{ frac{Delta L }{ L_{0}} = frac{ L — L_{0}}{L_{0} } = varepsilon } ]
( varepsilon ) – это отношение (доля) растяжения пружины к ее начальной длине. Измеряют в процентах и называют относительным удлинением.
Расчет силы упругости
Если растягивать пружину вручную, мы можем заметить: чем больше мы растягиваем пружину, тем сильнее она сопротивляется.
Значит, с удлинением пружины связана сила, которая сопротивляется этому удлинению.
Конечно, если пружина окажется достаточно упругой, чтобы сопротивляться. Например, разноцветная пружина-игрушка (рис. 3), изготовленная из пластмассы, сопротивляться растяжению, увеличивающему ее длину в два раза, практически не будет.

Разноцветная пластмассовая пружина-игрушка растяжению сопротивляется слабо
Закон Гука
Английский физик Роберт Гук, живший во второй половине 17-го века, установил, что сила сопротивления пружины и ее удлинение связаны прямой пропорциональностью. Силу, с которой пружина сопротивляется деформации, он назвал ( F_{text{упр}} ) силой упругости.
[ large boxed{ F_{text{упр}} = k cdot Delta L }]
Эту формулу назвали законом упругости Гука.
( F_{text{упр}} left( H right) ) – сила упругости;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости).
Какие деформации называют малыми
Закон Гука применяют для малых удлинений (деформаций).
Если убрать деформирующую силу и тело вернется к первоначальной форме (размерам), то деформации называют малыми.
Если же тело к первоначальной форме не вернется – малыми деформации назвать не получится.
Как рассчитать коэффициент жесткости
Груз, прикрепленный к концу пружины, растягивает ее (рис. 4). Измерим удлинение пружины и составим силовое уравнение для проекции сил на вертикальную ось. Вес груза направлен против оси, а сила упругости, противодействующая ему – по оси.

Рис. 4. Вес подвешенного на пружине груза уравновешивается силой упругости
Так как силы взаимно компенсируются, в правой части уравнения находится ноль.
[ large F_{text{упр}} — m cdot g = 0 ]
Подставим в это уравнение выражение для силы упругости
[ large k cdot Delta L — m cdot g = 0 ]
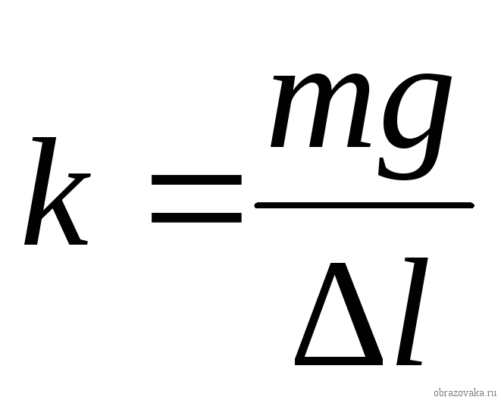
Прибавим к обеим частям вес груза и разделим на измеренное изменение длины (Delta L ) пружины. Получим выражение для коэффициента жесткости:
[ large boxed{ k = frac{ m cdot g }{Delta L} }]
(g) – ускорение свободного падения, оно связано с силой тяжести.
Соединяем две одинаковые пружины
В задачниках по физике и пособиях для подготовки к ЕГЭ встречаются задачи, в которых одинаковые пружины соединяют последовательно, либо параллельно.
Параллельное соединение пружин
На рисунке 5а представлена свободно висящая пружина. Нагрузим ее (рис. 5б), она растянется на величину (Delta L). Соединим две такие пружины параллельно и подвесим груз в середине перекладины (рис. 5в). Из рисунка видно, что конструкция из двух параллельных пружин под действием груза растянется меньше, нежели единственная такая пружина.

Рис. 5. Две пружины, соединенные параллельно, деформируются меньше одной такой пружины
Сравним растяжение двух одинаковых пружин, соединенных параллельно, с растяжением одной пружины. К пружинам подвешиваем один груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две параллельные пружины:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{параллел}} cdot frac{1}{2}= k_{1} ]
Умножим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{параллел}} = 2k_{1} } ]
Коэффициент жесткости (k_{text{параллел}}) двух пружин, соединенных параллельно, увеличился вдвое, в сравнении с одной такой пружиной
Последовательное соединение пружин
Рисунок 6а иллюстрирует свободно висящую пружину. Нагруженная пружина (рис. 6б), растянута на длину (Delta L). Теперь возьмем две такие пружины и соединим их последовательно. Подвесим груз к этим (рис. 6в) пружинам.
Практика показывает, что конструкция из двух последовательно соединенных пружин под действием груза растянется больше единственной пружины.
На каждую пружину в цепочке действует вес груза. Под действием веса пружина растягивается и передает далее по цепочке этот вес без изменений. Он растягивает следующую пружину. А та, в свою очередь, растягивается на такую же величину (Delta L).
Примечание: Под действием силы пружина растягивается и передает эту растягивающую силу далее по цепочке без изменений

Рис. 6. Система, состоящая из двух одинаковых пружин, соединенных последовательно, деформируются больше одной пружины
Сравним растяжение двух одинаковых последовательно соединенных пружин и растяжение единственной пружины. В обоих случаях к пружинам подвешиваем одинаковый груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две последовательные пружины:
[ large k_{text{послед}} cdot Delta L cdot 2 = m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{послед}} cdot Delta L cdot 2 = k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{послед}} cdot 2 = k_{1} ]
Разделим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{послед}} = frac{k_{1}}{2} } ]
Коэффициент жесткости (k_{text{послед}}) двух пружин, соединенных последовательно, уменьшится вдвое, в сравнении с одной такой пружиной
Потенциальная энергия сжатой или растянутой пружины
Пружина сжатая (левая часть рис. 7), или растянутая (правая часть рис. 7) на длину (Delta L ) обладает потенциальной возможностью вернуться в первоначальное состояние и при этом совершить работу, например, по перемещению груза. В таких случаях физики говорят, что пружина обладает потенциальной энергией.

Рис. 7. Деформированная — сжатая или растянутая пружина обладает потенциальной энергией
Эта энергия зависит от коэффициента жесткости пружины и от ее удлинения (или укорочения при сжатии).
Чем больше жесткость (упругость) пружины, тем больше ее потенциальная энергия. Увеличив удлинение пружины получим повышение ее потенциальной энергии по квадратичному закону:
[ large boxed{ E_{p} = frac{k}{2} cdot left( Delta L right)^{2} }]
( E_{p} left( text{Дж} right)) – потенциальная энергия сжатой или растянутой пружины;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости) пружины.
Выводы
- Упругие тела – такие, которые сопротивляются деформации;
- Во время деформации в упругих телах возникает сила, она препятствует деформации, ее называют силой упругости;
- Деформация – изменение формы, или размеров тела;
- Есть несколько видов деформации: изгиб, кручение, сдвиг, растяжение/сжатие;
- Удлинение пружины – это разность ее конечной и начальной длин;
- Сжатая или растянутая пружина обладает потенциальной энергией (вообще, любое упруго деформированное тело обладает потенциальной энергией);
- Система, состоящая из нескольких одинаковых пружин, будет иметь коэффициент жесткости, отличный от жесткости единственной пружины;
- Если пружины соединяют параллельно – коэффициент жесткости системы увеличивается;
- А если соединить пружины последовательно – коэффициент жесткости системы уменьшится.
Формула силы упругости
ОПРЕДЕЛЕНИЕ
Упругая сила равна жесткости тела, умноженной на величину деформации.

Здесь F — сила упругости, k — жесткость тела, — деформация тела.
Единицей измерения силы является Н (Ньютон).
Эта формула описывает простейший случай деформации и называется законом Гука. Сила эластичности возникает при попытке деформировать (сжимать, скручивать, растягивать и т. Д.) Тело и стремиться вернуть тело в исходное состояние. Деформация, после которой тело не изменилась, называется упругой. Жесткость тела зависит от материала, из которого состоит тело, от его формы и размера. На практике закон Гука используется для расчетов с малыми деформациями, с увеличением силы, вызывающей деформацию, она перестает действовать.
Примеры решения проблем на тему «Сила упругости»
ПРИМЕР 1
Под действием внешней силы жесткость пружины уменьшалась на 1 см. Найдите силу упругости.
Напомним 1 см = 0,01 м. Найдите силу согласно закону Гука:
Упругая сила составляет 300 ньютонов.
ПРИМЕР 2
Под действием силы тяжести фиксированное тело сжато на . Сколько бы тело выжимало, если оно весило в 3 раза меньше?
Тело неподвижно, поэтому его вес равен действующей на него силе тяжести. Пусть k — жесткость тела. Затем:
Средства
Пусть
сжимает тело после уменьшения его веса в 3 раза. Мы получаем:
При уменьшении веса в 3 раза сила сжатия уменьшилась в 3 раза.

Онлайн калькуляторы
На нашем сайте собрано более 100 бесплатных онлайн калькуляторов по математике, геометрии и физике.

Справочник
Основные формулы, таблицы и теоремы для учащихся. Все что нужно, чтобы сделать домашнее задание!

Заказать решение
Не можете решить контрольную?!
Мы поможем! Более 20 000 авторов выполнят вашу работу от 100 руб!
Формула силы упругости
![[ F = k cdot Delta l ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-6e3e0bf8a4801ca42918c141537a98e0_l3.png "Rendered by QuickLaTeX.com")
Здесь  – сила упругости,
– сила упругости,  – жёсткость тела,
– жёсткость тела,  – деформация тела.
– деформация тела.
Единица измерения силы – Н (ньютон).
Указанная формула описывает простейший случай деформации и называется законом Гука. Сила упругости возникает при попытке деформировать (сжать, скрутить, растянуть и т.д.) тело и стремиться вернуть тело в первоначальное состояние. Деформацию, после которой тело не изменилось, называют упругой. Жёсткость тела зависит от материала, из которого состоит тело, от его формы и размера. На практике закон Гука применяют для расчётов при малых деформациях, при увеличении силы, вызывающей деформацию, он перестаёт действовать.
Примеры решения задач по теме «Сила упругости»
| Понравился сайт? Расскажи друзьям! | |
Содержание:
- Определение и формула силы упругости
- Характеристики упругих свойств твердых тел
- Продольное растяжение (сжатие)
- Деформация сдвига
- Единицы измерения силы упругости
- Примеры решения задач
При действии на тело внешней силы онодеформируется (происходит изменение размеров, объема и часто формы тела). В ходе деформации
твердого тела возникают смещения частиц, находящихся в узлах кристаллической решетки из начальных положений равновесия в новые положения.
Такому сдвигу препятствуют силы, с которыми частицы взаимодействуют. В результате появляются внутренние силы упругости, уравновешивающие
внешние силы. Эти силы приложены к деформированному телу. Величина сил упругости пропорциональна деформации тела.
Определение и формула силы упругости
Определение
Силой упругости называют силу, имеющую электромагнитную природу, которая возникает в результате деформации тела, как ответ на внешнее воздействие.
Упругой называют деформацию, при которой после прекращения действия внешней силы тело восстанавливает свои прежние форму и размеры,
деформация исчезает. Деформация носит упругий характер только в том случае, если внешняя сила не превышает некоторого определенного значения,
называемого пределом упругости. Сила упругости при упругих деформациях является потенциальной. Направление вектора силы упругости противоположно
направлению вектора перемещения при деформации. Или по-другому можно сказать, что сила упругости направлена против перемещения частиц при деформации.
Характеристики упругих свойств твердых тел
Упругие свойства твердых тел характеризуют при помощи напряжения, которое часто обозначают буквой
$sigma$ .
Напряжение – это физическая величина, равная упругой силе, которая приходится на единичное сечение тела:
$$sigma=frac{d F_{u p r}}{d S}(1)$$
где dFupr – элемент силы упругости тела; dS – элемент площади сечения тела. Напряжение называется нормальным,
если вектор $d bar{F}_{u p r}$ перпендикулярен к dS.
Формулой для расчета силы упругости служит выражение:
$$d F_{u p r}=sigma d S=K frac{Delta x}{x} d S(2)$$
где $frac{Delta x}{x}$ — относительная деформация,
$Delta x$ – абсолютная деформация, x–первоначальное значение величины, которая характеризовала
форму или размеры тела; K – модуль упругости (
$k = sigma$ при
( $frac{Delta x}{x} = 1$ ). Величину обратную модулю упругости называют коэффициентом упругости.
Проще говоря, сила упругости по величине пропорциональная величине деформации.
Продольное растяжение (сжатие)
Продольное (одностороннее) растяжение состоит в том, что под действием растягивающей (сжимающей) силы происходит увеличение
(уменьшение) длины тела. Условием прекращения такого рода деформации является выполнение равенства:
$F = F_{upr} (3)$
где F – внешняя сила, приложенная к телу, Fupr – сила упругости тела. Мерой деформации в рассматриваемом процессе является
относительное удлинение (сжатие) $left(frac{Delta l}{l}right)$ .
Тогда модуль силы упругости можно определить как:
$$F_{u p r}=E frac{Delta l}{l} S(4)$$
где E – модуль Юнга, который в рассматриваемом случае равен модулю упругости (E=K) и характеризующий упругие свойства тела;
l – первоначальная длина тела; $Delta l$ – изменение длины при нагрузке
F=F_upr. При $Delta l=l E=frac{F}{S}=sigma$ – площадь поперечного сечения образца.
Выражение (4) называют законом Гука.
В простейшем случае рассматривают силу упругости, которая возникает при растяжении (сжатии) пружины. Тогда закон Гука записывают как:
$$F_{x}=k x(5)$$
где Fx – модуль проекции силы упругости; k – коэффициент жесткости пружины, x – удлинение пружины.
Деформация сдвига
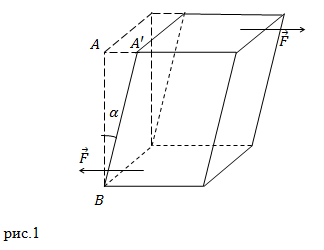
Сдвигом называют деформацию, при которой все слои тела, являющиеся параллельными некоторой плоскости, смещаются друг относительно друга.
При сдвиге объем тела, которое было деформировано, не изменяется. Отрезок, на который смещается одна плоскость относительно другой,
называют абсолютным сдвигом (рис.1 отрезок AA’). Если угол сдвига ($alpha$) мал, то
$alpha approx t g alpha=frac{A A^{prime}}{A B}$ . Этим углом ? (относительный сдвиг)
характеризуют относительную деформацию. При этом напряжение $sigma$ равно:
$$sigma=G alpha(6)$$
где G – модуль сдвига.
Единицы измерения силы упругости
Основной единицей измерения сил упругости (как и любой другой силы) в системе СИ является: [Fupr]=H
В СГС: [Fupr]=дин
Примеры решения задач
Пример
Задание. Какова работа силы упругости при деформации пружины жёсткость, которой равна k? Если первоначальное удлинение
пружины составляло x1, последующее удлинение составило x2.
Решение. В соответствии с законом Гука модуль силы упругости найдем как:
$$F = kx (1.1)$$
При этом сила упругости при первой деформации будет равна:
$$F_1 = kx_1 (1.2)$$
В случае второй деформации имеем:
$$F_2 = kx_2 (1.3)$$
Работу (A) сил упругости можно найти как:
$$A=langle Frangle S cos alpha(1.4)$$
где $langle Frangle$ — средняя величина силы упругости, равная:
$$langle Frangle=frac{F_{1}+F_{2}}{2}(1.5)$$
S- модуль перемещения, равный:
$S = x_2 — x_1 (1.6)$
$alpha=180^{circ}$ — угол между векторами перемещения и вектором сил упругости (эти векторы направлены в противоположные стороны).
Подставим выражения (1.2), (1.3), (1.5) и (1.6) в формулу для работы (1.4), получим:
$$A=frac{k x_{1}+k x_{2}}{2}left(x_{2}-x_{1}right) cos left(180^{circ}right)=-frac{k x_{1}+k x_{2}}{2}left(x_{2}-x_{1}right)$$
Ответ. $A=-frac{k}{2}left(x_{1}+x_{2}right)left(x_{2}-x_{1}right)$

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Пример
Задание. Тело массой m (которое можно считать материальной точкой) привязано к резиновому шнуру.
Это тело описывает в горизонтальной плоскости окружность с частотой вращения n. Угол отклонения шнура от вертикали равен
$alpha$.
Жёсткость шнура равна k. Какова длина нерастянутого шнура (l0)?
Решение. Сделаем рисунок.
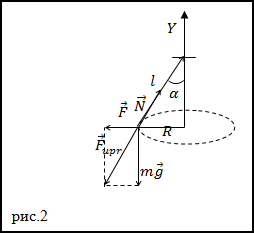
Сила натяжения (N) шнура вызывает его растяжениена величину ($Delta l$). При этом возникающая
сила упругости равна по модулю и противоположна по направлению силе натяжения:
$$bar{F}_{u p r}=-bar{N}(2.1)$$
Сила натяжения шнура равна (из рис.2 и второго закона Ньютона):
$$N=frac{m g}{cos alpha}(2.2)$$
Но так как сила натяжения равна по модулю силе упругости, то можно записать, что:
$$N=k Delta l rightarrow Delta l=frac{N}{k}(2.3)$$
Рассмотрение рис.2 дает:
$$frac{l}{R}=frac{N}{F} rightarrow l=frac{N R}{F}(2.4)$$
где l – длина растянутой нити, R – радиус окружности по которой движется точка. Применяя второй закон Ньютона, получим:
$$F=N sin alpha=m frac{v^{2}}{R}=4 pi^{2} n^{2} m R(2.5)$$
Подставим в (2.4) выражение для F, получаем:
$$l=frac{N}{4 pi^{2} n^{2} m}(2.6)$$
В таком случае длина нерастянутого шнура:
$$l_{0}=l-Delta l=frac{N}{4 pi^{2} n^{2} m}-frac{N}{k}=left(frac{1}{4 pi^{2} n^{2} m}-frac{1}{k}right) frac{m g}{cos alpha}$$
Ответ. $l_{0}=left(frac{1}{4 pi^{2} n^{2} m}-frac{1}{k}right) frac{m g}{cos alpha}$
Читать дальше: Формула скорости.