Будем действовать пошагово. Шаг 1 (связь между скоростями точек A и B при двойном касании) уже сделан выше.

Шаг 2. Запишем все силы, действующие на точки A и B по горизонтали и по вертикали при двойном касании:
точка A: х: –T·cos α + FA = 0, y: T·sin α – mg = maA,
точка B: х: T·cos α + Four = 0, y: –T·sin α – mg + FB = 0.
Здесь FA и FB — силы реакции опоры со стороны стенки и пола, которые строго перпендикулярны поверхности, T — сила напряжения стержня, которую мы считаем положительной, если стержень сжат, и отрицательной — если он растянут (поэтому мы и говорим «сила напряжения», а не «сила натяжения»). Напомним, что стержень абсолютно жесткий, поэтому действующие в нём силы — будь то сила сдавливания или сила растяжения — не меняют его длины, но влияют на баланс сил на его концах. Наконец, Four — это та «наша» сила, которую мы прикладываем к нижней точке, чтобы она двигалась без ускорения, а лишь с постоянной скоростью v. Эта сила неизвестна, и более того, она переменная: в каждый момент времени она подстраивается так, чтобы скомпенсировать другую силу, действующую на точку B по горизонтали.
Заметим, что если сила напряжения может быть как положительной, так и отрицательной, то сила реакции опоры может быть только положительна. Отрицательная сила реакции опоры FA означала бы, что стержень прилип к стенке, а мы тянем стержень на себя и пытаемся его отодрать. Такого в нашей задаче быть не может, поскольку по условию стержень просто прислонен к стене.
Глядя на эти формулы, легко понять, что происходит в момент, когда стержень перестает касаться стенки. До тех пор пока он на нее опирается, сила FA положительна, и значит, сила напряжения T тоже положительна. Эта же сила напряжения толкает точку B вперед, значит наша внешняя сила Four отрицательна, то есть направлена к стенке. Иными словами, для того чтобы конец стержня двигался с постоянной скоростью, мы должны не тянуть его, а подталкивать против движения, сопротивляясь скатывающей силе, передающейся по стержню.
Как только сила напряжения сменится на отрицательную, в точке касания со стенкой перестанет действовать сила реакции опоры: FA = 0. Тогда никакая больше сила не сможет скомпенсировать горизонтальную проекцию силы T, и точка A в результате начнет двигаться в направлении от стенки. Поэтому именно T = 0 (а следовательно, и Four = 0) и есть тот момент, когда произойдет отрыв.
Шаг 3. Теперь необходимо выяснить, при каком угле наклона это произойдет. Это можно сделать разными способами, но здесь я хочу продемонстрировать несколько необычный прием. Мы сейчас покажем, что наша задача с математической точки зрения полностью эквивалентна другой задаче, совсем непохожей на исходную. Эту задачу мы сможем решить без труда и тем самым получим ответ на интересующий нас вопрос.

Давайте обратим внимание на траекторию, которую описывает центр масс стержня при соскальзывании. Если стержень касается своими концами и стенки, и пола, то центр масс движется по дуге с радиусом R = L/2, показанной на рис. 4, слева. Если стержень касается только пола, то центр масс может находиться где угодно справа от дуги. Забраться «под дугу» центр масс не может никак. Поэтому исходная задача — соскальзывание стержня вдоль стенки, а затем отрыв от нее — с точки зрения движения центра масс выглядит так: центр масс без трения скользит по полукруглому холму и в какой-то момент срывается с него (см. рис. 4, справа).
Для того чтобы эта словесная аналогия стала полным математическим эквивалентом, перепишем потенциальную и кинетическую энергию стержня в исходной задаче
![]()
через массу центра масс (mcm = 2m), горизонтальную (vx = vB/2) и вертикальную (vy = vA/2) скорости центра масс, а также его высоту:
![]()
Обратите внимание на лишнюю двойку в кинетической энергии; она возникла потому, что кроме движения центра масс стержень еще и вращается, и в нашем простом случае кинетическая энергия вращения равна кинетической энергии движения центра масс. Это означает, что задачу нельзя просто так сводить к движению центра масс. Однако если переписать эти энергии вот так
![]()
где M = 2mcm = 4m, а = g/2, а скорость
![]()
то все формулы становятся привычными. Таким образом, мы приходим к выводу: наша задача математически эквивалентна задаче о скольжении одной-единственной материальной точки с массой M = 4m по полукруглому холму радиуса R = L/2 в ослабленном поле тяжести с ускорением свободного падения a = g/2. Всё это происходит также под действием дополнительной горизонтальной силы (аналог Four), которая обеспечивает постоянство горизонтальной скорости точки (vx = v/2). Из геометрии видно, что тот угол α, при котором точка срывается с холма, как раз равен углу, при котором стержень отрывается от стенки в исходной задаче. Этот угол и требуется найти.
Эту задачу решить уже несложно. Для того чтобы тело массы M двигалось по окружности радиуса R со скоростью u, надо, чтобы центростремительная сила равнялась Mu2/R. Эта сила в нашем случае складывается из проекции силы тяжести Ma·sin α, а также силы реакции опоры и проекции силы Four. В момент отрыва две последние силы исчезают, и это позволяет нам наконец-то записать условие на угол α:
![]()
Отсюда получаем:
![]()
Поскольку синус не бывает больше единицы, а v и L задаются в условии независимо, мы получаем два разветвления задачи: если скорость велика, отрыв произойдет сразу же, и дальше стержень будет падать свободно. Если же скорость достаточно мала (что и предполагалось в условии), то отрыв произойдет не сразу, а при угле α, задаваемом найденной формулой. Стоит также отметить, что ту же самую формулу можно было найти, рассматривая исходную задачу в системе отсчета точки B (рис. 2, справа) и записав центростремительное ускорение для точки A
Шаг 4. Осталось обсчитать свободное падение стержня с начального угла α. Проще всего это сделать, вновь перейдя в (инерциальную) систему отсчета, где точка B покоится (рис. 2, справа, но только без стенки). В этой системе отсчета сила Four приложена к неподвижной точке, и поэтому она работы не совершает. Значит, в этой системе отсчета можно воспользоваться законом сохранения энергии:
![]()
Скорость u1 — это (вертикальная) скорость точки A в этой системе отсчета в момент удара об пол. Возвращаясь обратно в исходную систему отсчета, получаем окончательный ответ:
![]()
В любой момент времени скорости
любых двух точек плоской фигуры
![]() и
и![]() связаны равенством
связаны равенством
|
|
|
Рис. 2.3 |
![]() (a)
(a)
Вектор
![]() представляет собой скорость, полученную
представляет собой скорость, полученную
точкой![]() при вращении плоской фигуры вокруг оси,
при вращении плоской фигуры вокруг оси,
проходящей через полюс![]() перпендикулярно плоской фигуре. Этот
перпендикулярно плоской фигуре. Этот
вектор направлен перпендикулярно
отрезку![]() (по касательной к окружности, которую
(по касательной к окружности, которую
описывает точка![]() при вращении тела вокруг оси
при вращении тела вокруг оси![]() ),
),
причем в сторону вращения тела (Рис.
2.3). В соответствии с формулой Эйлера
![]()
Пример 2.4
Пластина совершает плоскопараллельное
движение. В данный момент времени угловая
скорость пластины равна
![]() ,
,
проекция на ось![]() скорости точки
скорости точки![]() пластины равна
пластины равна![]() .
.
Скорость точки![]() образует с осью
образует с осью![]() угол
угол![]() (Рис. 2.4). Определить модули скоростей
(Рис. 2.4). Определить модули скоростей
точек![]() и
и![]() ,
,
если![]() .
.
|
|
|
Рис. 2.4 |
Запишем уравнение (a)
в проекциях на координатные оси:
 или
или
Учитывая данные задачи, получаем:
 или
или

Отсюда:

Следует заметить, что прямое
использование формулы (a)
целесообразно в довольно небольшом
числе случаев. В некоторых задачах имеет
смысл использовать так называемую
теорему о проекциях. Поскольку вектор![]() перпендикулярен отрезку
перпендикулярен отрезку![]() ,
,
из формулы (a) получаем
утверждение:
проекции скоростей концов отрезка,
соединяющего две точки абсолютно
твердого тела, на направление этого
отрезка равны.
Пример 2.5
Стержень
![]() движется в плоскости рисунка, причём
движется в плоскости рисунка, причём
его конец![]() всё время находится на полуокружности
всё время находится на полуокружности![]() ,
,
а сам стержень всё время касается
неподвижного выступа![]() ,
,
расположенного на диаметре![]() (Рис. 2.5). Определить скорость
(Рис. 2.5). Определить скорость![]() точки стержня, касающейся выступа, в
точки стержня, касающейся выступа, в
тот момент времени, когда радиус![]() перпендикулярен
перпендикулярен![]() ,
,
если известно, что скорость точки![]() в этот момент
в этот момент![]() .
.
|
|
|
Рис. 2.5 |
Заметим, что направления скоростей
точек![]() и
и![]() в данный момент времени известны.
в данный момент времени известны.
Скорость точки![]() направлена по касательной к траектории,
направлена по касательной к траектории,
т.е. по касательной к окружности в нижней
точке. Скорость точки![]() направлена вдоль стержня, т.к. по условию
направлена вдоль стержня, т.к. по условию
задачи стержень не отрывается от выступа.
Таким образом, для заданного положения
стержня известны углы, которые образуют
векторы скоростей точек![]() и
и![]() с отрезком
с отрезком![]() .
.
В таком случае целесообразно использовать
теорему о проекциях скоростей:
![]()
Решение задач с помощью мгновенного
центра скоростей. Основной способ
определения поля скоростей при
плоскопараллельном движении твёрдого
тела основан на использовании мгновенного
центра скоростей.
Как уже говорилось, за полюс можно
принять любую точку плоской фигуры. В
данный момент времени различные точки
тела имеют разные скорости. За полюс
имеет смысл принимать точку, скорость
которой в данный момент времени равна
нулю.
Точка, принадлежащая плоской фигуре
или неизменно с ней связанная, скорость
которой в данный момент времени равна
нулю, называется мгновенным центром
скоростей.
|
|
|
Рис. 2.6 |

Скорость любой точки![]() плоской фигуры определяется так же, как
плоской фигуры определяется так же, как
если бы тело вращалось вокруг оси,
проходящей через мгновенный центр
скоростей перпендикулярно плоскости
движения плоской фигуры (Рис. 2.6):
![]()
![]()
Пример 2.6
Кривошипн0-шатунный механизм связан
шарнирно в середине
![]() шатуна со стержнем
шатуна со стержнем![]() ,
,
а последний – со стержнем![]() ,
,
который может вращаться вокруг оси![]() .
.
Определить угловую скорость стержня![]() в указанном на Рис. 2.7 положении механизма,
в указанном на Рис. 2.7 положении механизма,
если точки![]() и
и![]() расположены на одной вертикали; угловая
расположены на одной вертикали; угловая
скорость![]() кривошипа
кривошипа![]() равна 8 рад/с,
равна 8 рад/с,![]()
![]()
|
|
|
Рис. 2.7 |
Стержень![]() вращается вокруг неподвижной оси.
вращается вокруг неподвижной оси.
Скорость точки![]() определяем по формуле Эйлера:
определяем по формуле Эйлера:
![]()
Движение стержня
![]() плоскопараллельное. Мгновенный центр
плоскопараллельное. Мгновенный центр
скоростей находится в точке![]() .
.
Учитывая, что скорости точек тела
пропорциональны расстояниям до
мгновенного центра скоростей, получаем:
![]() Отсюда:
Отсюда:![]()
Движение стержня
![]() плоскопараллельное. Скорость точки
плоскопараллельное. Скорость точки![]() направлена по касательной к окружности
направлена по касательной к окружности
радиуса![]() ,
,
которая является траекторией точки![]() .
.
При заданном положении механизма
направление скорости точки![]() совпадает с направлением стержня
совпадает с направлением стержня![]() .
.
Для определения скорости точки![]() имеет смысл использовать теорему о
имеет смысл использовать теорему о
проекциях скоростей:
![]()
Остаётся определить угловую скорость
стержня
![]() .
.
Поскольку движение этого стержня
вращательное, используем формулу Эйлера:
![]()
Пример 2.7
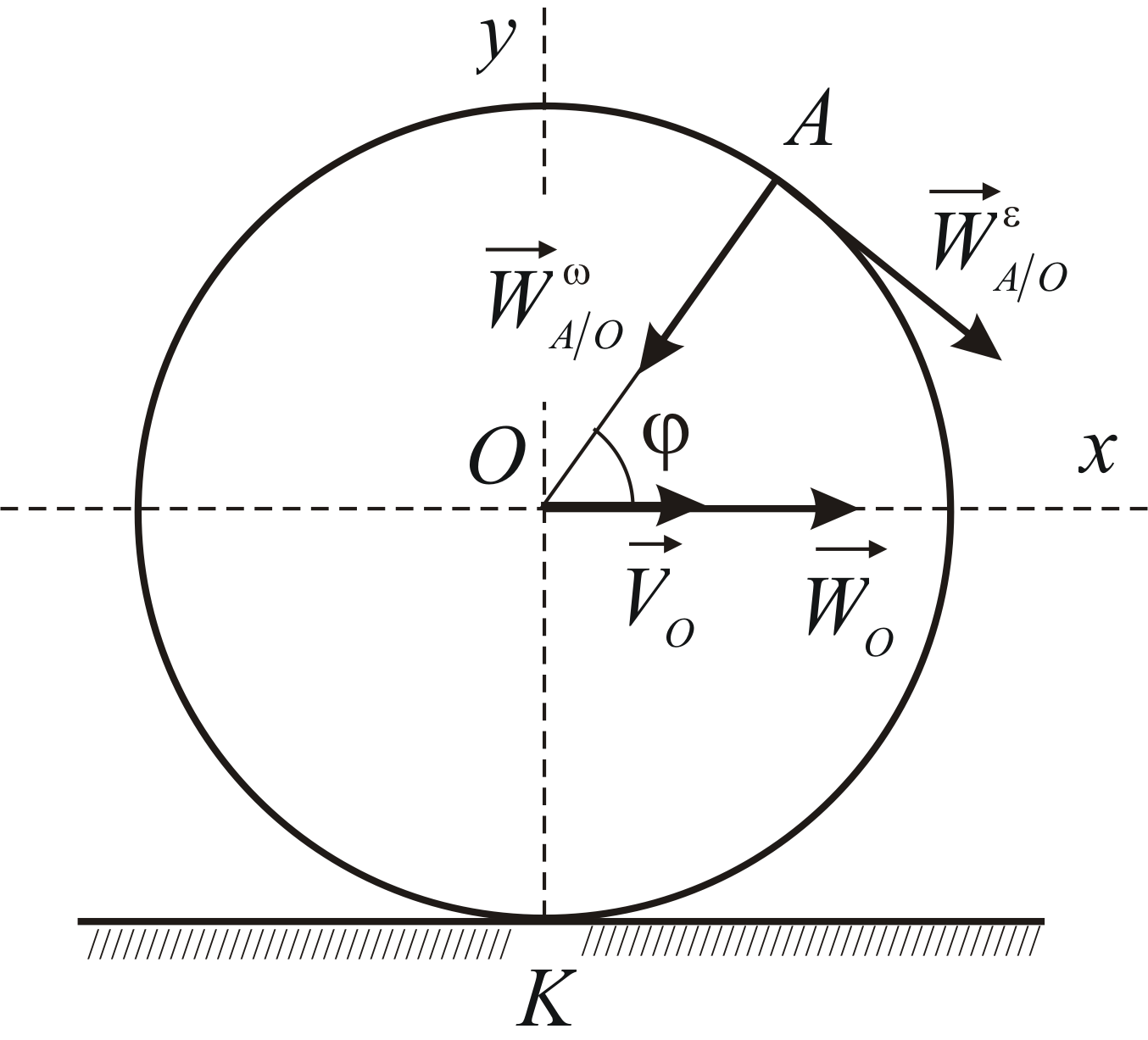
Колесо радиуса
![]() катится без скольжения по неподвижной
катится без скольжения по неподвижной
поверхности (Рис. 2.8). Скорость центра
колеса![]() .
.
Определить скорости точек![]() и
и![]()
|
|
|
Рис. 2.8 |
Мгновенный центр скоростей![]() находится в точке касания колеса и
находится в точке касания колеса и
дороги. Зная скорость центра, находим
угловую скорость колеса:
![]()
Скорости точек колеса определяем по
формуле Эйлера:

![]()
Качение колеса представляет интерес
еще и в том отношении, что позволяет
проиллюстрировать смысл формулы (a).
Пусть колесо, движение которого мы
рассматриваем, – ведущее колесо, т.е.
оно принудительно вращается некоторым
приводом. Рассмотрим возможные
режимы движения.
Может случиться так, что колесо
вращается, но автомобиль не перемещается
– буксует. В этом случае движение колеса
представляет собой вращение вокруг
неподвижной оси
![]() .
.
Все точки колеса будут описывать
окружности с центром в точке![]() ,
,
радиусы которых равны расстояниям от
этих точек до оси колеса. Скорость любой
точки направлена по касательной к этой
окружности и определяется по формуле
Эйлера.
Другое возможное движение колеса
представляет собой качение с
проскальзыванием. Автомобиль при этом
перемещается, но колеса вращаются
несоразмерно быстро. Скорость оси колеса
отлична от нуля и вступает в свои права
формула (a). Скорость,
например, точки![]() ,
,
которая в первом случае была ее полной
скоростью, становится скоростью,
полученной точкой![]() при вращении колеса вокруг оси
при вращении колеса вокруг оси![]() .
.
Полная же скорость точки![]() теперь геометрически складывается из
теперь геометрически складывается из
скорости точки![]() и скорости, полученной точкой
и скорости, полученной точкой![]() при вращении колеса вокруг оси
при вращении колеса вокруг оси![]()
![]()
Заметим, что в этом случае движение
оси (т.е. автомобиля) и вращение колеса
происходят независимо друг от друга и
каждое из них должно быть задано.
Последний режим движения колеса –
качение без скольжения. Именно этот
случай рассмотрен в примере 2.7. Движение
оси и вращение колеса оказываются
взаимосвязанными. В каждое мгновение
очевидно положение точки, скорость
которой равна нулю. В такой ситуации
при определении скоростей точек колеса
удобнее за полюс брать не точку
![]() ,
,
а мгновенный центр скоростей![]() .
.
ЗАДАЧИ, РЕКОМЕНДУЕМЫЕ ДЛЯ РАЗБОРА В
АУДИТОРИИ И ДЛЯ ЗАДАНИЯ НА ДОМ:
Из сборника задач И.В.Мещерского: 16.3;
16.10; 16.15; 16.16; 16.19; 16.24; 16.28; 16.29; 16.31;
16.32; 16.33; 16.34; 16.35; 16.36; 16.38; 16.39.
Из учебника «ТЕОРЕТИЧЕСКАЯ МЕХАНИКА —
теория и практика»: комплект СР-20.
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 6
Пример 2.8
Определить скорость и ускорение ползуна
![]() кривошипного механизма, а также угловую
кривошипного механизма, а также угловую
скорость и угловое ускорение шатуна![]() в положении, изображенном на Рис. 2.9.
в положении, изображенном на Рис. 2.9.
Кривошип![]() вращается замедленно, имея в данный
вращается замедленно, имея в данный
момент времени угловую скорость![]() и угловое ускорение
и угловое ускорение![]() .
.
Ползун движется по криволинейной
направляющей, имеющей в данном положении
механизма радиус кривизны![]() .
.
Дано:![]() .
.
Зная направления скоростей точек
![]() и
и![]() ,
,
построим мгновенный центр скоростей![]() стержня
стержня![]() ,
,
после чего определим угловую скорость
стержня![]()
![]()
и скорость точки
![]()
![]()
Попытка определить угловое ускорение
стержня
![]() ,
,
используя определение
![]()
закончится неудачей, поскольку зависимость
![]() неизвестна.
неизвестна.
Для определения ускорения точки
![]() принимаем за полюс точку
принимаем за полюс точку![]() .
.
Поскольку известны траектории всех
точек во всех их движениях, представим
ускорения точек их составляющими:
![]()
![]()
Вычислим векторы, входящие в уравнение
![]() .
.
|
|
|
Рис. 2.9 |

Точка
![]() принадлежит вращающемуся телу
принадлежит вращающемуся телу![]() .
.
Определяем модули составляющих ускорения
этой точки:
![]()
![]()
направления векторов показаны на
Рис. 2.9.
Точка
![]() движется по криволинейной направляющей.
движется по криволинейной направляющей.
Касательное и нормальное ускорения
точки![]() определяются по формулам:
определяются по формулам:
![]()
направления составляющих ускорения
показаны на Рис. 2.9. По приведенной
формуле не удается вычислить касательное
ускорение точки
![]() ,
,
поскольку неизвестны зависимости
расстояний![]() и
и![]() от времени.
от времени.
Находим составляющие ускорения,
полученного точкой
![]() при вращении шатуна
при вращении шатуна![]() вокруг оси
вокруг оси![]() .
.
Заметим, что вращательное ускорение
остается неизвестным по модулю, поскольку
неизвестно угловое ускорение шатуна:
![]()
![]()
Таким образом, из шести векторов,
входящих в равенство
![]() ,
,
только два неизвестны по модулю. Определим
эти неизвестные из уравнения![]() .
.
Это уравнение можно решить аналитически
или геометрически. Рассмотрим оба
способа решения.
Имеет смысл выбрать координатные
оси так, чтобы в каждое уравнение в
проекциях входила только одна неизвестная.
Направим ось
![]() вдоль
вдоль![]() (перпендикулярно
(перпендикулярно![]() ),
),
а ось![]() по направлению
по направлению![]() (перпендикулярно
(перпендикулярно![]() ).
).
Записывая уравнение![]() в проекциях на ось
в проекциях на ось![]() ,
,
получаем:
![]()
Отсюда

Отрицательный знак говорит о том,
что предполагаемое направление вектора
![]() было выбрано ошибочно; в действительности
было выбрано ошибочно; в действительности
этот вектор направлен в противоположную
сторону.
Записывая уравнение
![]() в проекциях на ось
в проекциях на ось![]() ,
,
получаем:
![]()
Отсюда
![]()
![]()
|
|
|
Рис. 2.10 |
Вычислив![]() ,
,
можем определить угловое ускорение
стержня![]() :
:

Рассмотрим геометрический способ
решения уравнения
![]() .
.
Построим в масштабе сумму векторов,
стоящих в правой части уравнения![]() .
.
От некоторой точки![]() отложим
отложим![]() ,
,
от его конца отложим![]() ,
,
а затем![]() (Рис. 2.10). Остается построить
(Рис. 2.10). Остается построить![]() ,
,
модуль которого неизвестен. Проведем
через конец![]() пунктирную прямую, параллельную
пунктирную прямую, параллельную![]() .
.
Конец суммы векторов, стоящих в правой
части уравнения![]() ,
,
лежит на этой прямой.
Обратимся к левой части уравнения
![]() .
.
Отложим от точки![]() известный вектор
известный вектор![]() .
.
Через его конец проведем пунктирную
прямую, параллельную вектору![]() .
.
Точка пересечения построенных прямых
определяет положение конца вектора
ускорения точки![]() .
.
Пример 2.9
Колесо радиуса
![]() катится без скольжения по прямолинейному
катится без скольжения по прямолинейному
пути (Рис. 2.11). Ось колеса движется
ускоренно, имея в данный момент времени
скорость![]() и ускорение
и ускорение![]() .
.
Определить проекции ускорение любой
точки![]() обода колеса на оси координат.
обода колеса на оси координат.
Принимая за полюс точку
![]() ,
,
получаем:
![]()
![]()
причем
![]()
где
![]() – угловая скорость колеса;
– угловая скорость колеса;![]() – его угловое ускорение.
– его угловое ускорение.
|
|
|
Рис. 2.11 |
Зная положение мгновенного
центра скоростей колеса – точка касания
колеса и дороги, определяем угловую
скорость колеса:
![]()
В рассматриваемой задаче расстояние
от точки
![]() ,
,
скорость которой известна, до мгновенного
центра скоростей![]() со временем не изменяется. Это
со временем не изменяется. Это
обстоятельство позволяет найти угловое
ускорение колеса в данный момент времени
по определению углового ускорения:
![]() ,
,
так как
![]() представляет собой проекцию вектора
представляет собой проекцию вектора
ускорения точки![]() на направление её вектора скорости,
на направление её вектора скорости,
которая в рассматриваемом случае равна![]() .
.
Записывая уравнение
![]() в проекциях на координатные оси, получаем
в проекциях на координатные оси, получаем
проекции вектора ускорения точки![]() :
:
![]()
![]()
Пример 2.10
Колесо радиуса
![]() катится без скольжения по криволинейной
катится без скольжения по криволинейной
поверхности (Рис.2.12). Ось колеса движется
ускоренно, имея в данный момент времени
скорость![]() и касательное ускорение
и касательное ускорение![]() .
.
Определить проекции ускорения любой
точки![]() обода колеса на заданные координатные
обода колеса на заданные координатные
оси, если радиус кривизны в точке![]() равен
равен![]() .
.
|
|
|
Рис. 2.12 |
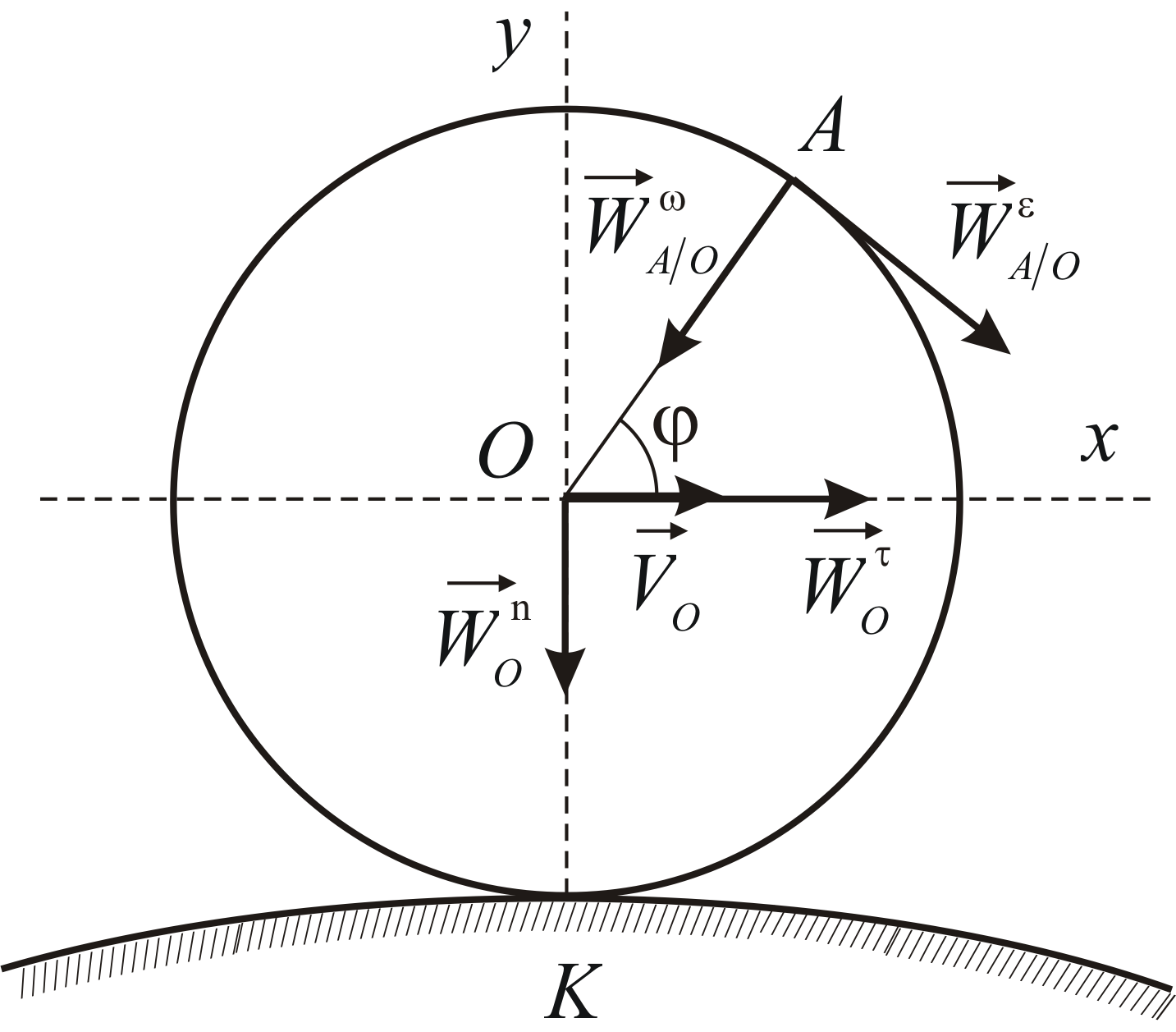
Задача решается так же, как в
примере 2.9, но в отличие от предыдущей
задачи, траектория точки![]() – кривая линия. У точки
– кривая линия. У точки![]() появляется вторая составляющая ускорения
появляется вторая составляющая ускорения
– нормальная:
В результате получаем:
![]()
Пример 2.11
Колесо радиуса
![]() катится без проскальзывания по
катится без проскальзывания по
прямолинейному пути. Ось колеса движется
равномерно со скоростью![]() (Рис. 2.13). Определить ускорение любой
(Рис. 2.13). Определить ускорение любой
точки![]() колеса.
колеса.
|
|
|
Рис. 2.13 |
Ось колеса движется равномерно
и прямолинейно. Следовательно, точка![]() – мгновенный центр ускорений. Для любой
– мгновенный центр ускорений. Для любой
точки![]() колеса получаем:
колеса получаем:
![]()
Но угловая скорость колеса
![]() постоянна и, следовательно, угловое
постоянна и, следовательно, угловое
ускорение колеса равно нулю.
Тогда
![]()
![]()
Таким образом, ускорение любой точки
совпадает с осестремительным ускорением,
полученным этой точкой при вращении
колеса вокруг оси, проходящей через
центр колеса
![]() перпендикулярно плоскости движения.
перпендикулярно плоскости движения.
ЗАДАЧИ, РЕКОМЕНДУЕМЫЕ ДЛЯ РАЗБОРА В
АУДИТОРИИ И ДЛЯ ЗАДАНИЯ НА ДОМ:
Из сборника задач И.В.Мещерского: 18.11;
18.13; 18.16; 18.18; 18.22; 18.23; 18.25; 18.26;
18.28; 18.37; 18.38; 18.39; 18.40.
Из учебника «ТЕОРЕТИЧЕСКАЯ МЕХАНИКА —
теория и практика»: комплекты СР-21;
СР-22.
ПРАКТИЧЕСКИЕ
ЗАНЯТИЯ № 7-8
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
03.03.2015560.03 Кб15PSY — recommendation.pdf
- #
- #
Беляев С.А. Кинематика и связи // Квант. — 1971. — № 2. — С. 44-46.
По специальной договоренности с редколлегией и редакцией журнала «Квант»
Кинематика часто рассматривает движение абсолютно твердых тел, то есть тел, расстояния между любыми двумя точками которых остаются постоянными. При этом существуют методы, значительно упрощающие решение кинематических задач. С одним из них мы сейчас познакомимся.
Пусть тела при движении соприкасаются, и скольжение между ними отсутствует. Тогда скорости обоих тел в точке соприкосновения полностью совпадают (рис. 1).
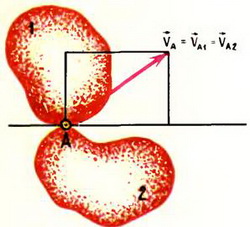
Рис. 1
Если же между телами есть проскальзывание, то совпадают лишь проекции скоростей на перпендикуляр к касательной в точке соприкосновения. При этом достаточно, чтобы касательная существовала хотя бы для одной из скользящих поверхностей (рис. 2).
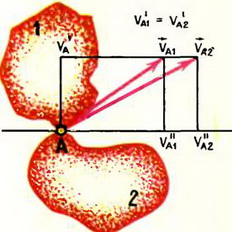
Рис. 2.
Рассмотрим несколько примеров.
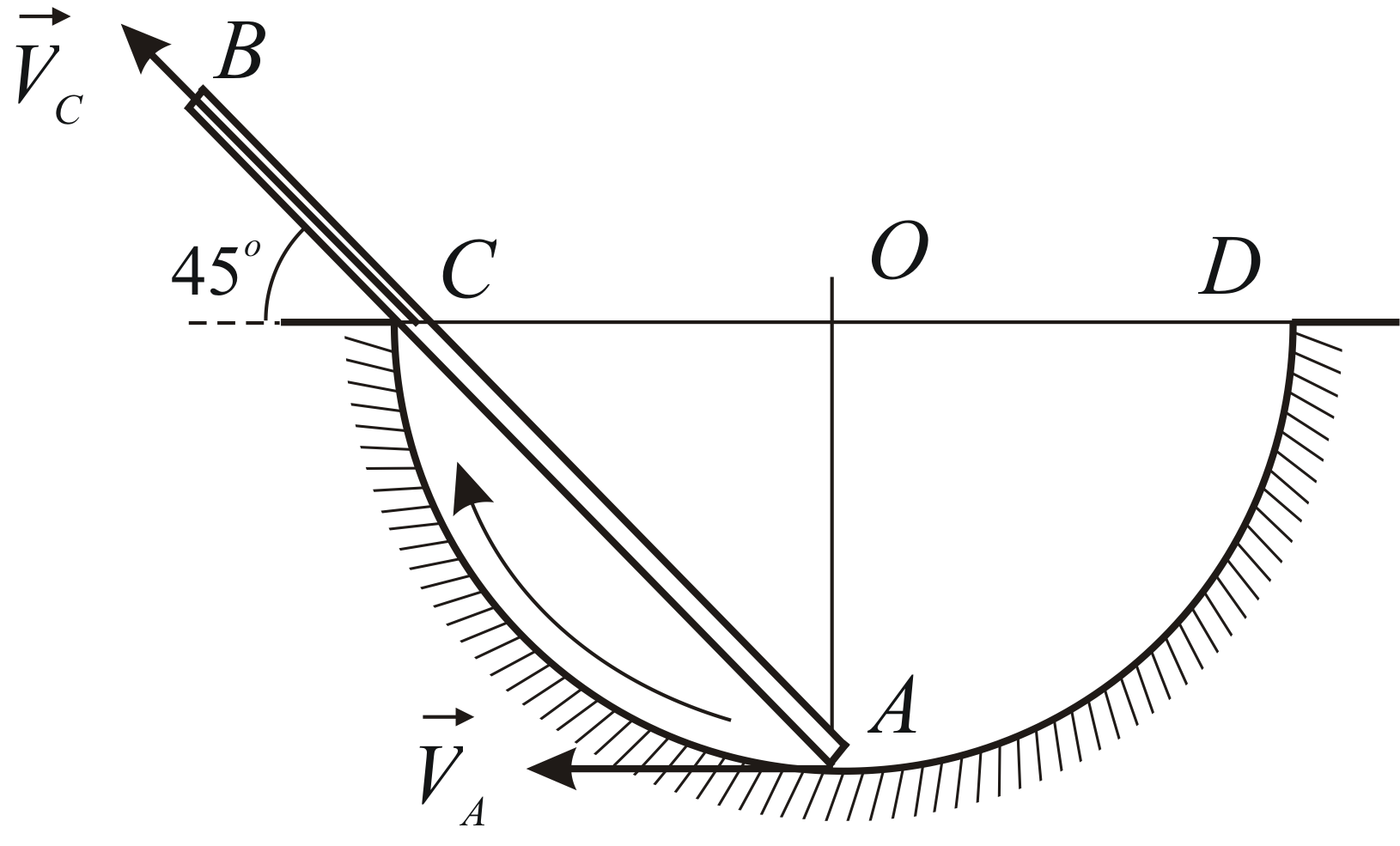
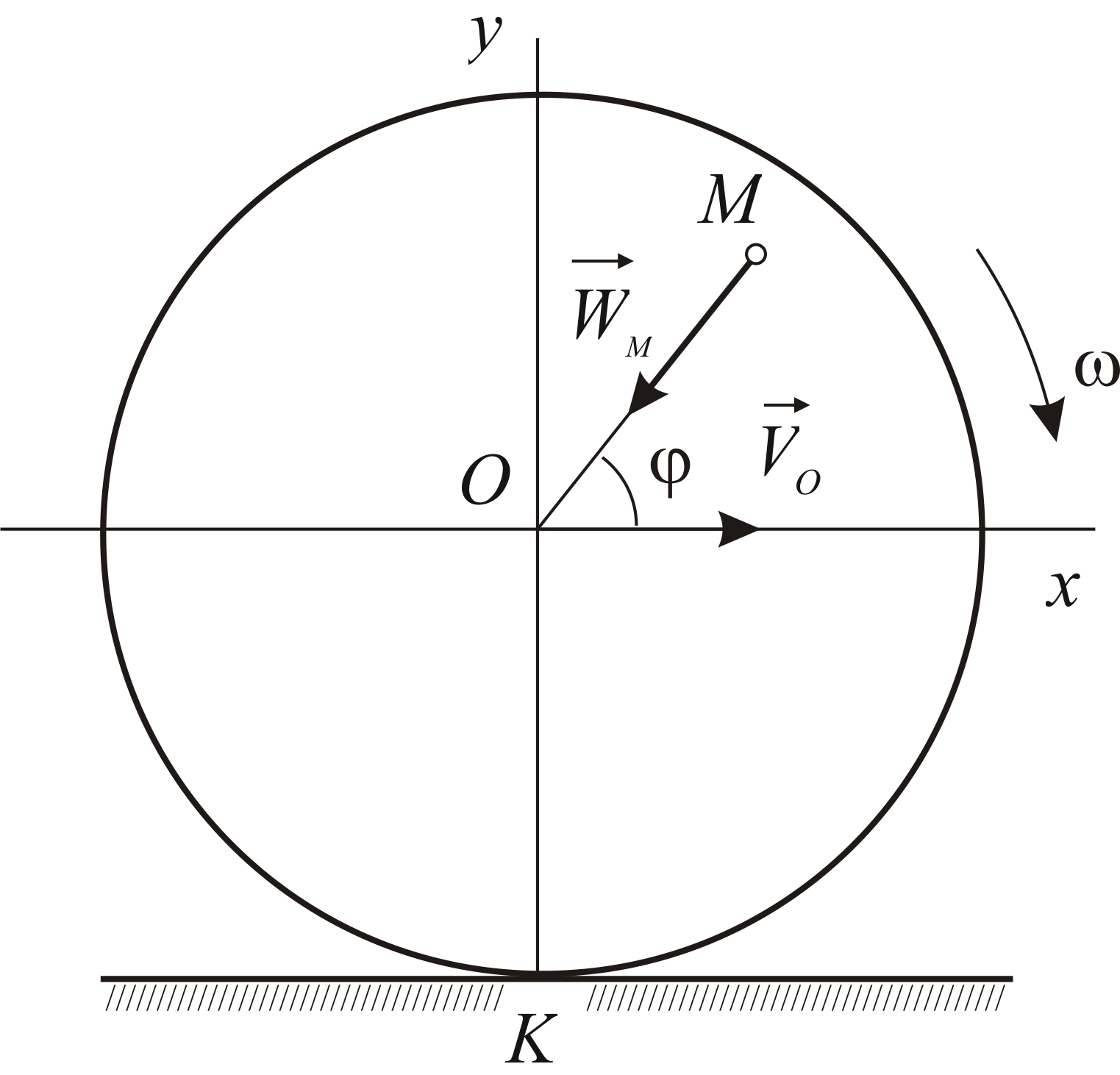
1. Стержень ОА вращается по часовой стрелке с угловой скоростью ω, приводя в движение кирпич ABCD с боковой стороной а (рис. 3). Найти зависимость скорости кирпича υ от угла α.
Решение. Стержень и кирпич соприкасаются в точке А. Следовательно, скорости кирпича и стержня в этой точке в направлении MN  совпадают. Таким образом,
совпадают. Таким образом,

или

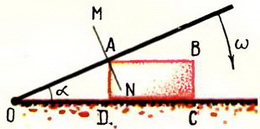
Рис. 3.
2. Источник света S находится на расстоянии l от экрана MN (рис. 4). В начальный момент времени плоский предмет высоты h начинает равномерно двигаться со скоростью υ от источника к экрану. Найти зависимость скорости движения края тени по экрану от времени.
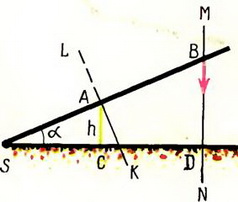
Рис. 4.
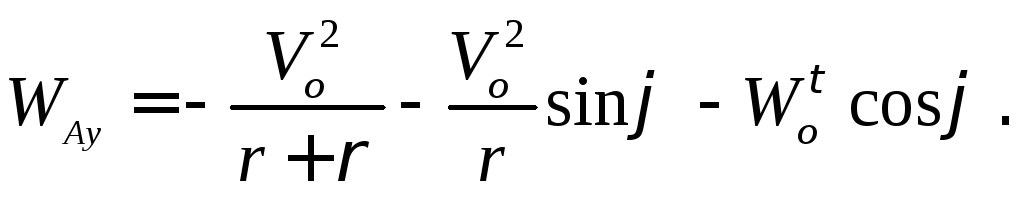
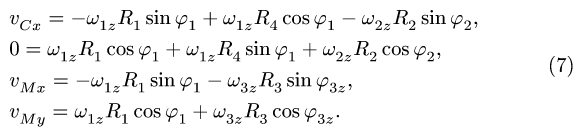
Решение. В данной задаче в роли стержня выступает луч SB. В точке А луч «соприкасается» с предметом, а в точке В с экраном, образуя границу тени. Составим два уравнения, связывающих проекции скоростей в точках А и В:  — проекция на LК,
— проекция на LК, ![]() — проекция на MN. Здесь ω — угловая скорость вращения луча. Разделив второе равенство на первое и учитывая, что
— проекция на MN. Здесь ω — угловая скорость вращения луча. Разделив второе равенство на первое и учитывая, что
 и
и 
получим

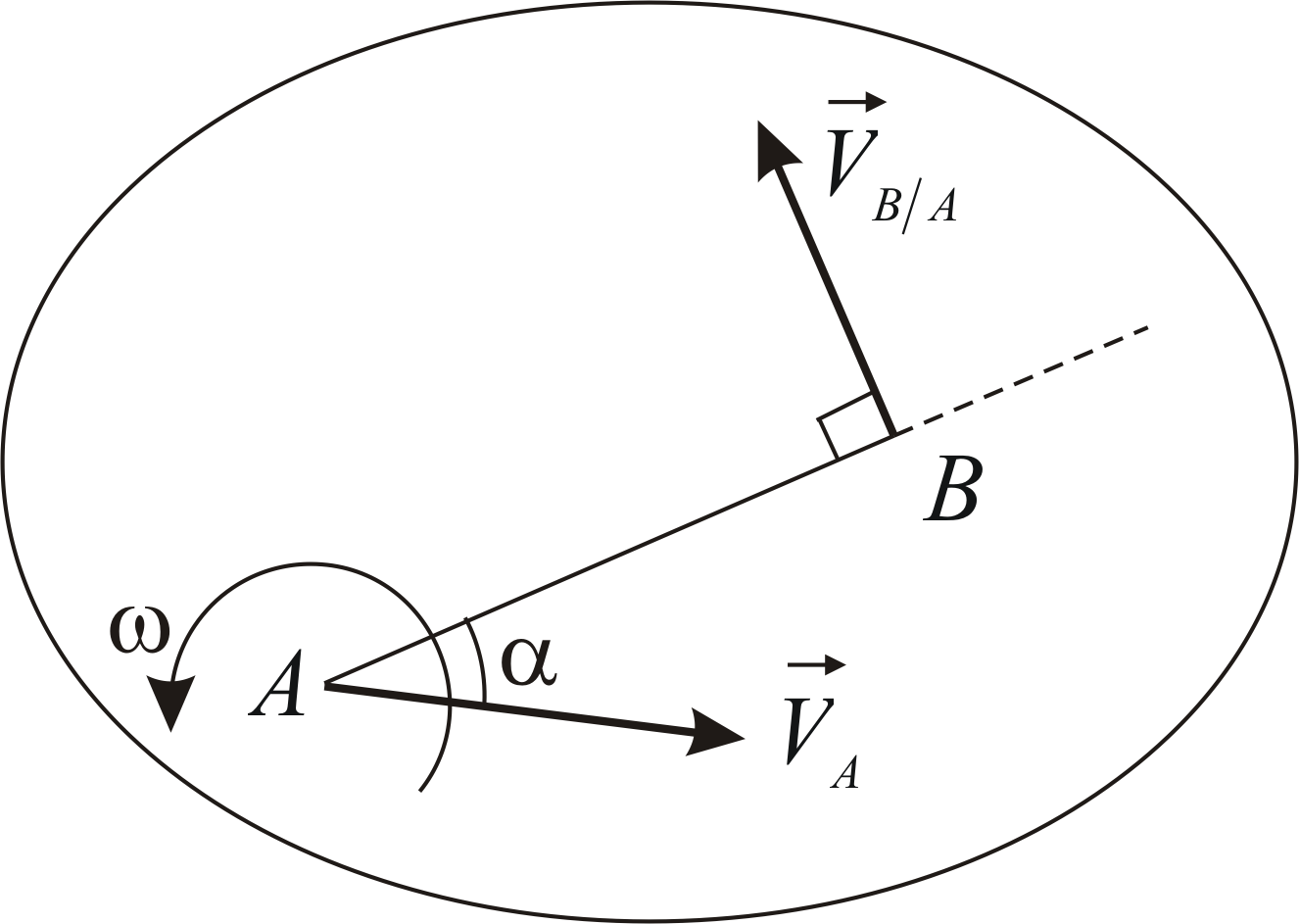
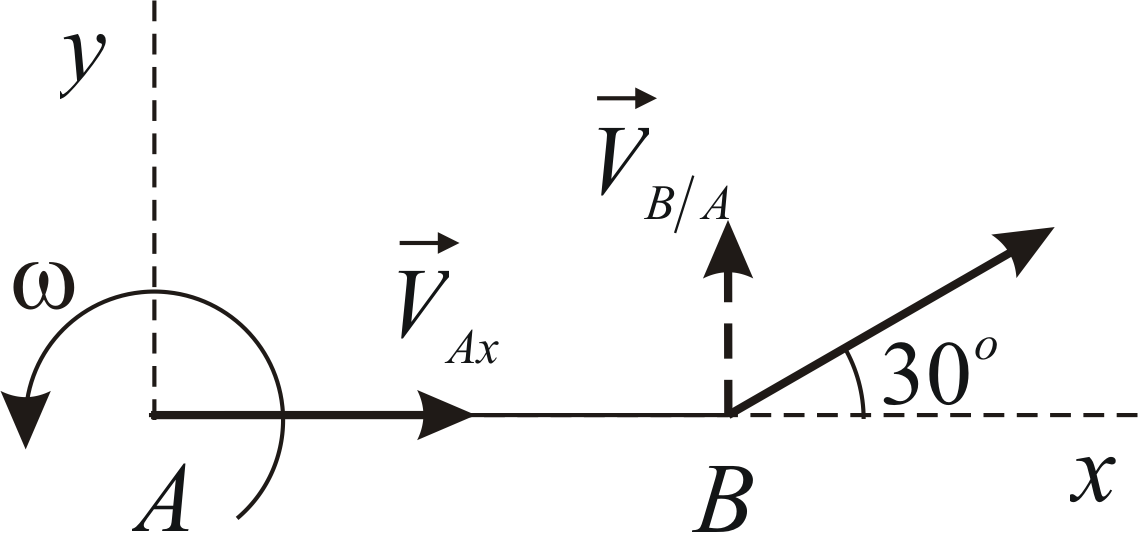
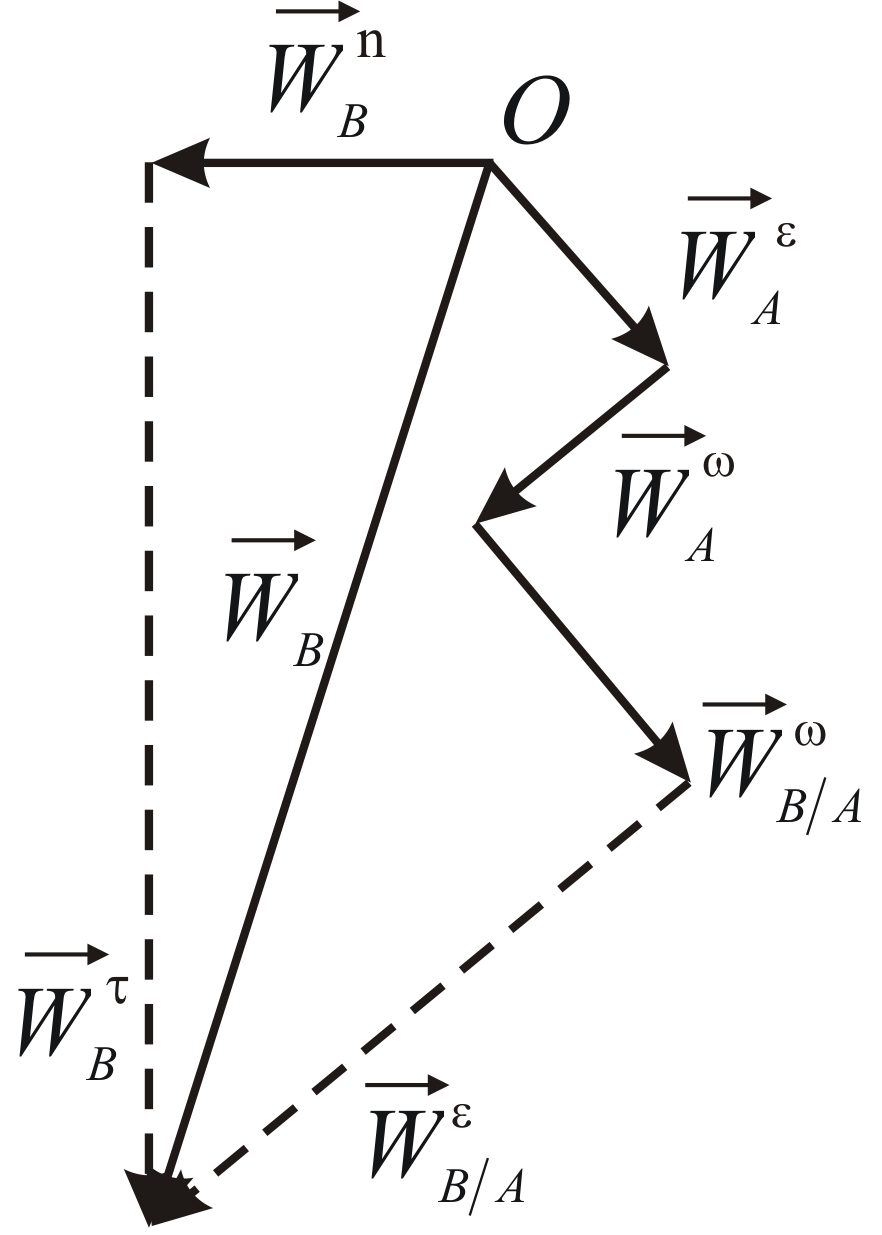
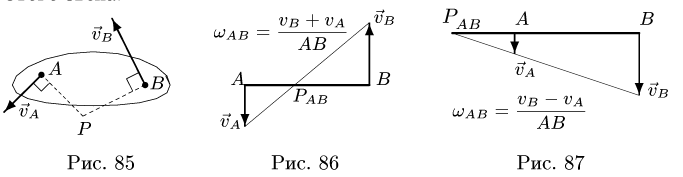
Пусть теперь стержень АВ заданной длины l (рис. 5) движется произвольно. Скорости  и
и  его концов могут быть различны, но, так как длина стержня не меняется, проекции этих скоростей
его концов могут быть различны, но, так как длина стержня не меняется, проекции этих скоростей  и
и  должны быть равны:
должны быть равны:  . Проекции скоростей
. Проекции скоростей  и
и  определяют круговое движение стержня с угловой скоростью
определяют круговое движение стержня с угловой скоростью  (проверьте это самостоятельно).
(проверьте это самостоятельно).
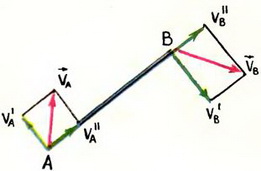
Рис. 5.
Решим две задачи.
3. Стержень АВ опирается своими концами о стороны тупого угла β (рис. 6). Верхний конец стержня тянут со скоростью υ вдоль стороны АО. Найти зависимость скорости u точки В от угла α.
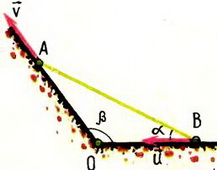
Рис. 6.
Решение. Так как длина стержня АВ неизменна, проекции скоростей его концов на направление стержня одинаковы:

или
Рассмотрим случай, когда длина стержня изменяется во время движения («стержнем» может служить, например, отрезок, соединяющий две заданные точки, расстояние между которыми меняется). Тогда соотношение, связывающее проекции скоростей концов стержня, принимает вид

где u — скорость изменения длины стержня. (Модуль здесь нужен, так как неизвестно, какая из скоростей больше.)
4. Лодку с крутого берега тянут за веревку с постоянной скоростью υ. Найти зависимость скорости лодки u от угла α.
Решение. В данном случае нас интересует часть веревки АВ. Скорость ее сокращения равна υ. Векторы скоростей концов, веревки А и В показаны на рисунке 7.
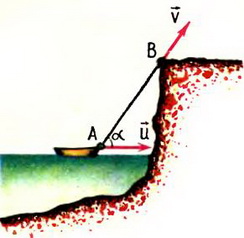
Рис. 7.
Согласно утверждению, приведенному выше, имеем

или так как  то
то

Попробуйте самостоятельно решить подобные задачи.
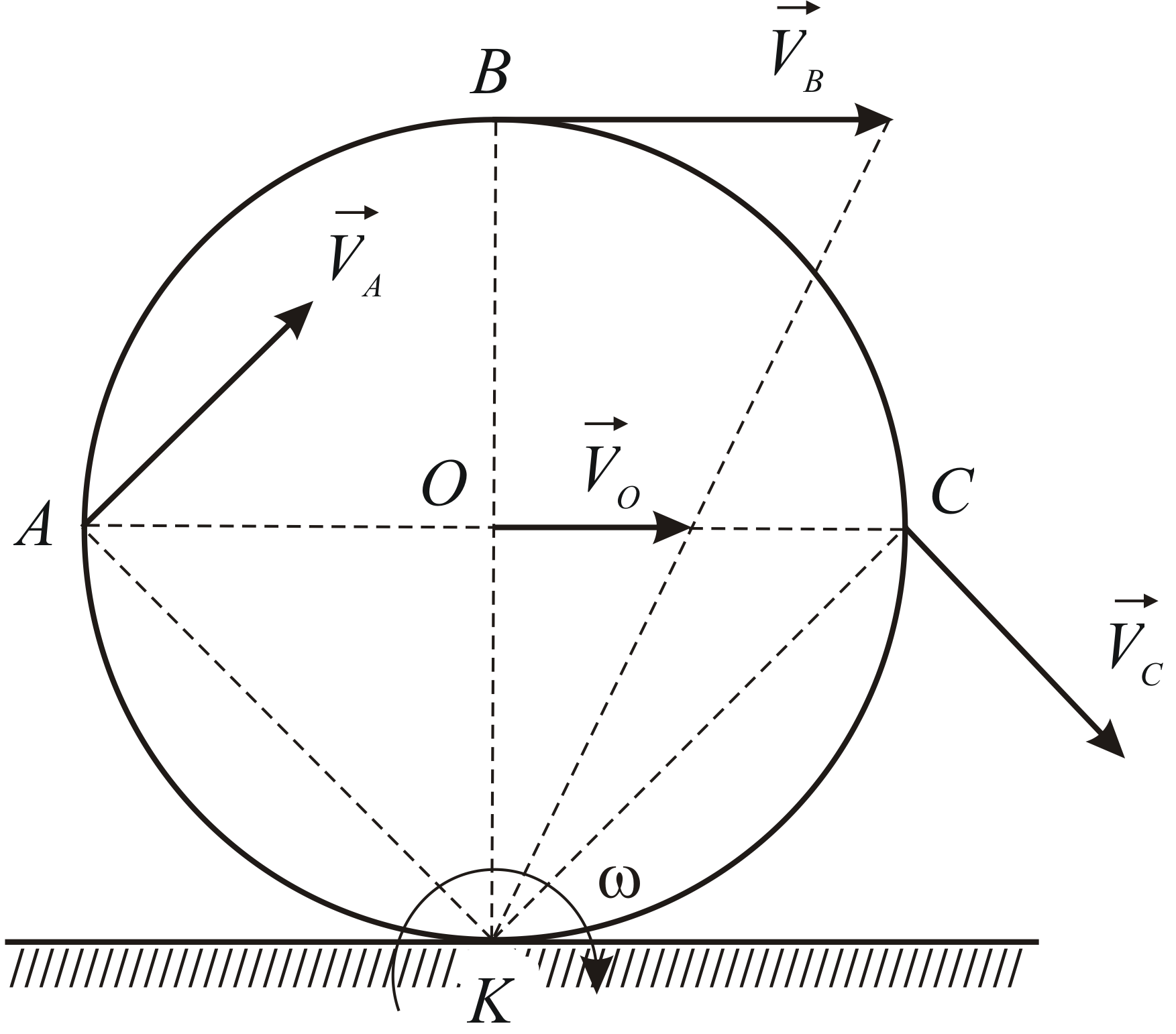
1. Стержень ОА вращается по часовой стрелке с угловой скоростью ω, приводя в движение цилиндр радиуса r (рис. 8). Скольжения между цилиндром и плоскостью нет. Найти зависимость скорости цилиндра υ от угла α.
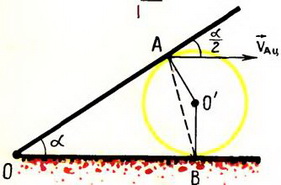
Рис. 8.
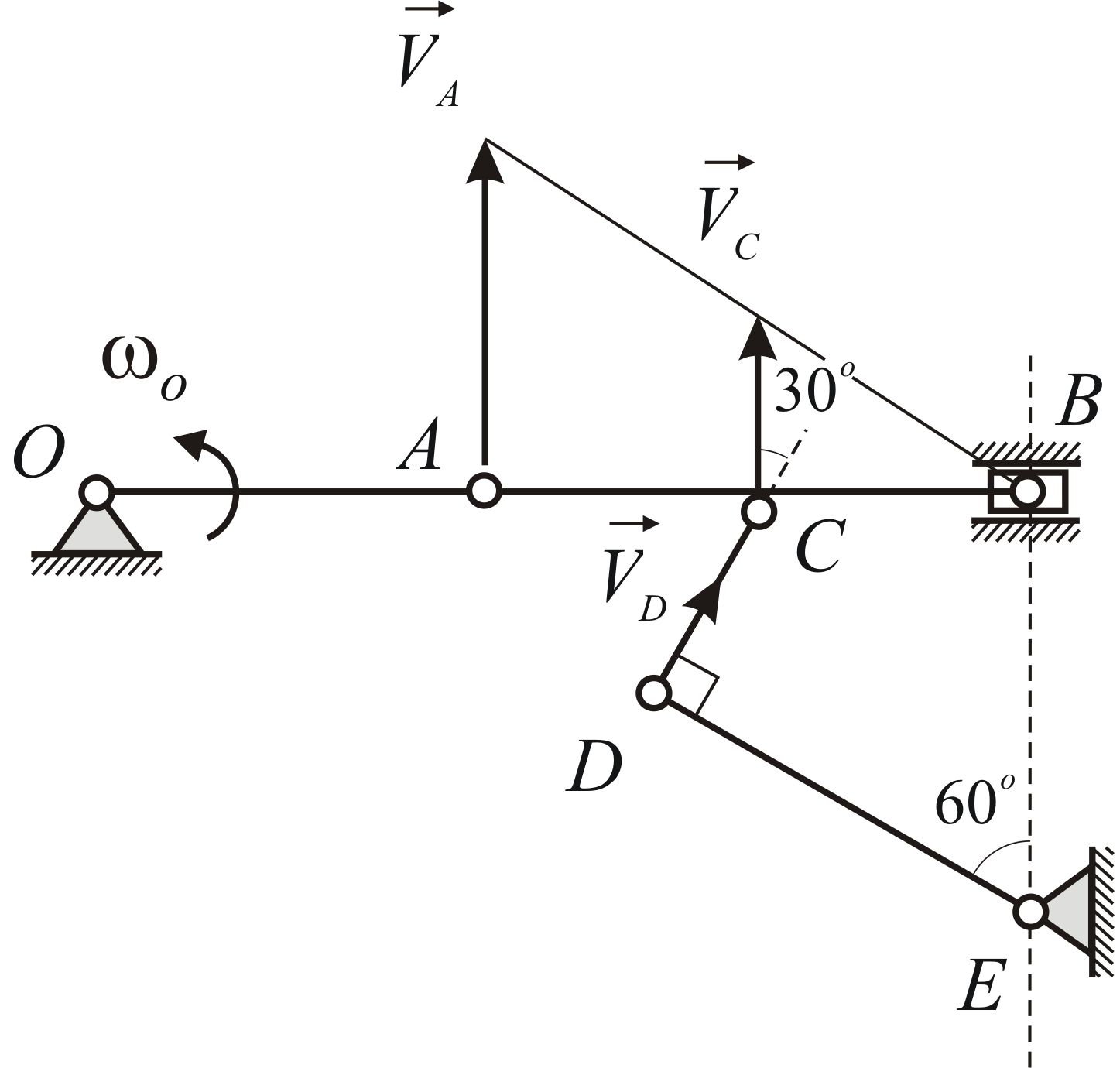
2. Кривошип АО длины r (рис. 9) вращается с угловой скоростью ω, длина шатуна АВ равна l. Найти скорость υ точки В шатуна, если  .
.
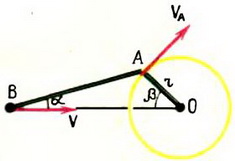
Рис. 9.
3. Шарик, предварительно раскрутив вокруг оси, кладут на горизонтальную поверхность. Коэффициент трения шарика о поверхность отличен от нуля. Под действием силы трения шарик изменяет свое первоначальное вращательное движение и начинает каким-то образом двигаться по поверхности. Описать, как будет происходить это движение.
Ответы
1. (*На рисунке к этой задаче вектор скорости υAц должен быть направлен под углом α/2 к стержню.)
В точке А проекции скоростей цилиндра υAц и стержня υAС на направление АО´  совпадают. Значение υAС равно
совпадают. Значение υAС равно  . Заметим, что мгновенная ось вращения цилиндра проходит через точку В. Поэтому υAц направлена перпендикулярно АВ и равна ω·AB, где ω — угловая скорость вращения цилиндра. Поскольку
. Заметим, что мгновенная ось вращения цилиндра проходит через точку В. Поэтому υAц направлена перпендикулярно АВ и равна ω·AB, где ω — угловая скорость вращения цилиндра. Поскольку
 и
и 
получим

Из условия равенства проекции имеем
или

Откуда
2. Поскольку длина АВ неизменна, проектируя скорости концов шатуна на направление АВ, получим  :
:

или
Воспользовавшись теоремой синусов

можно найти
Содержание:
Плоское движение тела:
При изучении темы ПЛОСКОЕ ДВИЖЕНИЕ ТЕЛА раздела КИНЕМАТИКА. вы научитесь применять аналитические и графические методы для определения скоростей и ускорений точек тел и механизмов. Хотя эти знания имеют самостоятельную ценность, особенно необходимы они будут для решения задач динамики тела и системы.
Приведены программы расчета кинематики плоского движения в математической системе Maple V. Анимационные возможности этой системы делают решение наглядным, позволяя глубже понять суть задачи.
Методы решения задачи кинематики плоского движения разнообразны. Выбрать оптимальный путь, который может существенно упростить решение, помогут примеры, приведенные в этой главе.
Скорости точек многозвенного механизма
Постановка задачи. Плоский многозвенный механизм с одной степенью свободы находится в движении. Известна угловая скорость какого-либо его звена или скорость одной из точек механизма. Найти скорости точек механизма и угловые скорости его звеньев.
План решения:
Рассмотрим два простых геометрических способа решения задачи, в которых, в отличие от аналитических методов, определяются модули скоростей и угловых скоростей. Не оговаривая отдельно, всякий раз под угловой скоростью 
1-й способ. Мгновенные центры скоростей
1. Определяем положение мгновенного центра скоростей (МЦС) каждого звена. МЦС лежит на пересечении перпендикуляров, проведенных
к скоростям точек, принадлежащих звену (рис. 85). У тех звеньев, у которых МЦС не существует (скорости двух точек параллельны и не перпендикулярны отрезку, их соединяющему), угловая скорость равна нулю, а скорости всех точек равны. Если векторы скоростей перпендикулярны отрезку их соединяющем}’, то имеют место два частных случая положения МЦС (рис. 86, 87).
Если тело (колесо, диск, цилиндр) катится по поверхности без проскальзывания, то МЦС этого тела находится в точке касания.
2. Для каждого звена определяем расстояния от его точек до МЦС этого звена.
3. Записываем систему уравнений для скоростей N точек звена  включая точку с известной скоростью:
включая точку с известной скоростью:

Здесь — угловая скорость звена
— угловая скорость звена  — расстояние от МЦС звена
— расстояние от МЦС звена до точки
до точки  Решаем систему, определяем угловую скорость звена, а затем скорости всех его точек.
Решаем систему, определяем угловую скорость звена, а затем скорости всех его точек.
Этот пункт плана выполняем последовательно для всех звеньев механизма. Очередное звено должно иметь общую точку (шарнир) с предыдущим, для которого угловая скорость найдена или известна.
2-й способ. План скоростей
1. Как и в методе МЦС ведем расчет, переходя от одного звена к другому, шарнирно с ним соединенном}’.
Построение начинаем с вектора, величина и направление которого известны или легко вычисляются. Этот вектор в заданном масштабе откладываем от некоторой произвольной точки О (рис. 91). Его конец определяет первую точку плана скоростей. Точку плана скоростей (конец вектора) отмечаем строчной буквой, соответствующей точке вектора скорости. Пусть первая точка плана скоростей обозначена как b.
2. Рассматриваем очередное звено, на котором имеется точка с уже известной скоростью. Необходимо, чтобы на этом звене была
еще одна точка с известным направлением вектора скорости (например, ползун или точка звена, совершающего вращательное движение). Пусть эта точка обозначена как С (рис. 88).
Справедливо правило, согласно которому неизменяемые отрезки механизма, обозначенные прописными буквами, перпендикулярны отрезкам плана скоростей, обозначенными теми же строчными буквами.
Следующая точка плана скоростей лежит на пересечении двух прямых. Одна прямая определяется направлением скорости точки С, вторая перпендикулярна ВС. Длина полученного отрезка Ос является модулем скорости  (рис. 91).
(рис. 91).
Скорости остальных точек этого звена (если таковые имеются) найдем по правилу подобия неизменяемых фигур механизма и фигур, обозначенных теми же строчными буквами плана скоростей.
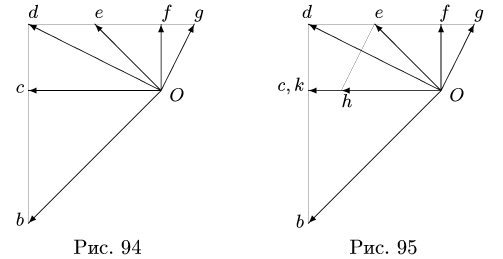
Пункт 2 плана выполняем для всех звеньев механизма (рис. 91-95).
3. После построения плана скоростей определяем угловую скорость каждого звена по простой формуле 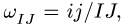 где
где  расстояние между точками
расстояние между точками  звена,
звена,  — длина отрезка на плане скоростей.
— длина отрезка на плане скоростей.
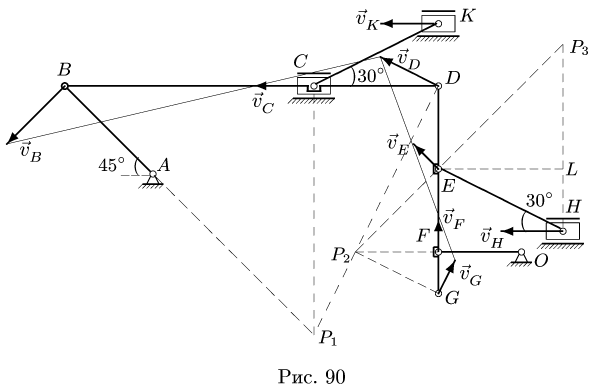
Задача №1
Плоский многозвенный механизм с одной степенью свободы приводится в движение кривошипом АВ, который вращается против часовой стрелки с угловой скоростью  (рис. 88).
(рис. 88).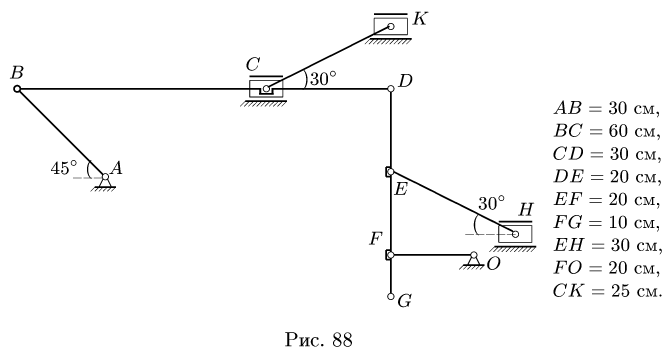
Ползуны С, К, Н движутся горизонтально,  Найти скорости точек В, С, D, Е, F, G, Н, К механизма и угловые
Найти скорости точек В, С, D, Е, F, G, Н, К механизма и угловые
8.1.Скорости точек многозвенного механизма скорости его звеньев АВ, BD, DG, EH, FO, СК.
Решение
1-й способ. Мгновенные центры скоростей
1. Определяем положение мгновенного центра скоростей каждого звена АВ, BD, DG, СК, EH, FO.
МЦС звеньев АВ и FO искать не требуется. Они совершают вращательное движение вокруг шарниров А и О соответственно. Можно условно считать, что там находятся их МЦС.
Вектор  скорости точки В направим перпендикулярно радиусу АВ против часовой стрелки (рис. 89). Далее, чтобы узнать положение МЦС следующего звена надо знать направления векторов скоростей двух его точек. Следующим звеном будет стержень BD, имеющий со звеном АВ общую точку В. У него есть три характерные точки В, С и D. Направление вектора скорости точки D пока неизвестно.
скорости точки В направим перпендикулярно радиусу АВ против часовой стрелки (рис. 89). Далее, чтобы узнать положение МЦС следующего звена надо знать направления векторов скоростей двух его точек. Следующим звеном будет стержень BD, имеющий со звеном АВ общую точку В. У него есть три характерные точки В, С и D. Направление вектора скорости точки D пока неизвестно.
Остается точка С. Ползун С движется строго горизонтально. Вектор скорости  направляем по горизонтали налево. Из двух возможных горизонтальных направлений мы выбрали этот вариант, исходя из теоремы о проекции векторов скоростей точек неизменяемого отрезка. Проекции должны быть равны и направлены в одну сторону. Таким образом, известны направления скоростей двух точек тела. Это позволяет определить МЦС звена BCD. Находим точку
направляем по горизонтали налево. Из двух возможных горизонтальных направлений мы выбрали этот вариант, исходя из теоремы о проекции векторов скоростей точек неизменяемого отрезка. Проекции должны быть равны и направлены в одну сторону. Таким образом, известны направления скоростей двух точек тела. Это позволяет определить МЦС звена BCD. Находим точку пересечения перпендикуляров, проведенных из точек В и С, к векторам
пересечения перпендикуляров, проведенных из точек В и С, к векторам  (рис. 89). Теперь определяем направление вектора
(рис. 89). Теперь определяем направление вектора  Он будет перпендикулярен радиусу
Он будет перпендикулярен радиусу  и направлен налево, исходя из той же теоремы о проекциях скоростей точек отрезка BD.
и направлен налево, исходя из той же теоремы о проекциях скоростей точек отрезка BD.
Со стержнем BCD имеют общие точки два стержня: СК и DG. Рассмотрим сначала стержень DG. Направление вектора скорости точки D уже известно. Чтобы определить положение МЦС, надо знать направление вектора еще одной точки на этом звене. Такой точкой является F. Вектор ее скорости перпендикулярен радиусу вращения FO и направлен вертикально. Перпендикуляры к векторам  задают положение точки
задают положение точки  вокруг которой звено DEFG совершает мгновенное вращательное движение.
вокруг которой звено DEFG совершает мгновенное вращательное движение.
Перпендикулярно радиусам  проводим вектора
проводим вектора 
Переходим к звену ЕН, МЦС которого находим на пересечении перпендикуляров к  (продолжение радиуса
(продолжение радиуса  и к вектору скорости
и к вектору скорости  ползуна Н, движущегося горизонтально. Получаем точку
ползуна Н, движущегося горизонтально. Получаем точку — МЦС звена ЕН.
— МЦС звена ЕН.
И, наконец, рассматриваем звено СК. Скорости  параллельны и не перпендикулярны СК. Звено С К совершает мгновенно-поступательное движение. Условно можно сказать, что МЦС звена С К находится в бесконечности.
параллельны и не перпендикулярны СК. Звено С К совершает мгновенно-поступательное движение. Условно можно сказать, что МЦС звена С К находится в бесконечности.
2. Определяем расстояния от МЦС звеньев до тех точек этих звеньев, скорости которых надо найти.
Звено BCD
Звено DEFG. Пользуясь подобием  находим
находим 
Звено ЕН (рис. 90). Находим расстояния до МЦС:

8.1.Скорости точек многозвенного механизма

3. Записываем систему уравнений для скоростей трех точек звена BCD, включая точку В с известной скоростью:
Решаем эту систему. Находим 

Система уравнений для скоростей точек звена DEFG имеет вид
Из первого уравнения вычисляем угловую скорость:

Получаем скорости точек:
Система уравнений для скоростей точек звена ЕН имеет вид
Отсюда

Звено СК совершает мгновенно-поступательное движение. Следовательно, скорости точек С я К равны:  Угловая скорость этого звена равна нулю
Угловая скорость этого звена равна нулю  .
.
 Можно считать, что МЦС звена, движущегося мгновенно-поступательно, находится в бесконечности. Поэтому, рассуждая формально, получаем
Можно считать, что МЦС звена, движущегося мгновенно-поступательно, находится в бесконечности. Поэтому, рассуждая формально, получаем 
Частично проверить решение можно графически. Известно, что концы векторов скоростей точек неизменяемого отрезка лежат на одной прямой. Убеждаемся в этом, проводя прямую через концы векторов  отложенных на чертеже в масштабе (рис. 90).
отложенных на чертеже в масштабе (рис. 90).
Аналогично, проверяем скорости  Через их концы также можно провести прямую. Остались непроверенными скорости точек Е и Н. Для этого можно воспользоваться методом построения плана скоростей, см. ниже 2-й способ.
Через их концы также можно провести прямую. Остались непроверенными скорости точек Е и Н. Для этого можно воспользоваться методом построения плана скоростей, см. ниже 2-й способ.
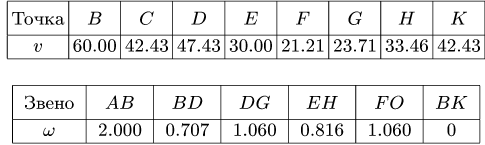
Результаты расчетов помещаем в таблицы. Скорости даны в см/с, угловые скорости — в рад/с.
2-й способ. План скоростей
1. Построение начинаем с вектора, величина и направление которого известны или легко вычисляются. В нашем случае это  . Вектор
. Вектор  в заданном масштабе откладываем от некоторой произвольной точки О (рис. 91). Все остальные вектора также будем откладывать от этой точки.
в заданном масштабе откладываем от некоторой произвольной точки О (рис. 91). Все остальные вектора также будем откладывать от этой точки.
8.1.Скорости точек многозвенного механизма
Точки плана скоростей (концы векторов) отмечаем соответствующими строчными буквами. Таким образом, положение точки b на плане скоростей известно.
2. Рассматриваем звено BCD (рис. 90), на котором имеется точка В с известной скоростью. Неизменяемые отрезки механизма, обозначенные прописными буквами, перпендикулярны отрезкам плана скоростей, обозначенными теми же строчными буквами, Звено механизма ВС горизонтально.
Звено механизма ВС горизонтально.
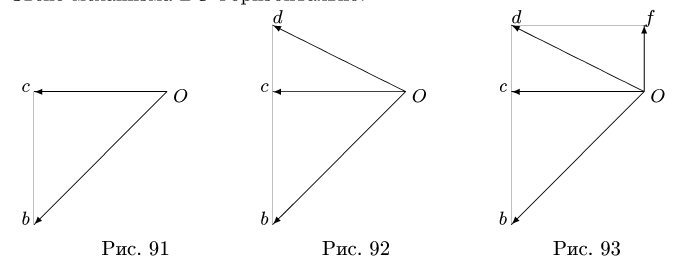
Следовательно, точка с плана скоростей лежит на одной вертикали с точкой b. Известно направление скорости ползуна С. Точку с находим на пересечении двух прямых. Вектор  изображен отрезком Ос плана скоростей (рис. 91). Из правила подобия фигур механизма и фигур, обозначенных теми же строчными буквами плана скоростей(в данном случае это отрезки BC и CD),имеем
изображен отрезком Ос плана скоростей (рис. 91). Из правила подобия фигур механизма и фигур, обозначенных теми же строчными буквами плана скоростей(в данном случае это отрезки BC и CD),имеем 
Так получаем точку d плана скоростей и, следовательно, величину и направление вектора (рис. 92).
(рис. 92).
Определяем скорость  Направление этого вектора известно — он перпендикулярен радиусу вращения FO. По свойству плана скоростей
Направление этого вектора известно — он перпендикулярен радиусу вращения FO. По свойству плана скоростей  Точка d на плане уже есть. Проводим через нее горизонтальную прямую (перпендикулярную DF) до пересечения с вертикальным направлением вектора скорости
Точка d на плане уже есть. Проводим через нее горизонтальную прямую (перпендикулярную DF) до пересечения с вертикальным направлением вектора скорости  Получаем точку
Получаем точку  (рис. 93). Соединяя ее с центром О, определяем модуль искомой скорости
(рис. 93). Соединяя ее с центром О, определяем модуль искомой скорости 
Из соотношения подобия  на отрезке
на отрезке  находим внутри него конец вектора скорости
находим внутри него конец вектора скорости  и вне отрезка, пользуясь пропорцией
и вне отрезка, пользуясь пропорцией  точку
точку  определяющую вектор скорости
определяющую вектор скорости  (рис. 94).
(рис. 94).
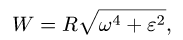
Аналогично, определяем скорость (рис. 95). Здесь
(рис. 95). Здесь  Точки
Точки  и с на плане скоростей совпадают.
и с на плане скоростей совпадают.
3. Угловые скорости звеньев определяем по простым формулам: 
Ускорения точек многозвенного механизма
Постановка Задачи. Плоский шарнирно-стержневой механизм состоит из шарнирно соединенных стержней и ползунов. Механизм приводится в движение кривошипом, который вращается с заданной угловой скоростью. В указанном положении механизма найти ускорения всех его шарниров.
*) Существует еще несколько способов проверки вычисления скоростей точек многозвенного механизма.
8.2. Ускорения точек многозвенного механизма
План решения
1. Определяем угловые скорости звеньев и скорости точек механизма (см. § 8.1).
2. Определяем ускорение шарнира, принадлежащего звену с известным законом движения:
где R — длина звена. Если задан закон изменения утла поворота  то
то 
Если угловая скорость звена постоянна,  Вектор ускорения в этом случае направляем к центру вращения звена.
Вектор ускорения в этом случае направляем к центру вращения звена.
3. Для определения ускорения точки В тела, совершающего плоское движение, воспользуемся векторной формулой

Здесь  — известное ускорение точки, выбранной в качестве полюса,
— известное ускорение точки, выбранной в качестве полюса,  — центростремительное ускорение условного движения В вокруг А по окружности с радиусом
— центростремительное ускорение условного движения В вокруг А по окружности с радиусом  — вращательное ускорение.
— вращательное ускорение.
Возможны три случая определения ускорения по формуле (1). А. Точка В является ползуном, или направление ее вектора ускорения по каким-либо другим причинам известно. В этом случае формула (1) в проекциях на оси координат представляет собой систему двух линейных уравнений для неизвестного модуля ускорения ав и неизвестного углового ускорения звена 
Б. В точке В шарнирно соединены звено АВ и звено ВС, где С — неподвижный шарнир. Таким образом, точка В движется по окружности с центром в С, и ее ускорение можно представить в виде векторной суммы нормального и тангенциального ускорения:

Величину нормального ускорения  находим, зная скорость точки
находим, зная скорость точки  Направляем вектор
Направляем вектор по радиусу ВС к центру вращения С. Вектор
по радиусу ВС к центру вращения С. Вектор  неизвестен лишь по модулю, направление его известно — перпендикулярно радиусу ВС.
неизвестен лишь по модулю, направление его известно — перпендикулярно радиусу ВС.
В результате, система уравнений (1-2), записанная в проекциях, дает четыре уравнения для четырех неизвестных 
 Решая ее, находим ускорение
Решая ее, находим ускорение 
В. Точка В не удовлетворяет случаям А и Б. В этом случае либо она не является шарниром, либо к ней шарнирно присоединено тело, совершающее плоское (не вращательное и не поступательное) движение. Для решения задачи должны быть известны угловая скорость и угловое ускорение звена, на котором находится точка В. Они могут быть найдены при вычислении скорости и ускорения других точек этого звена. При этих условиях уравнение (1) является векторным уравнением для одной неизвестной  .
.
Этот пункт плана выполняем последовательно для всех звеньев механизма. Очередное звено должно иметь общую точку (шарнир) с предыдущим.
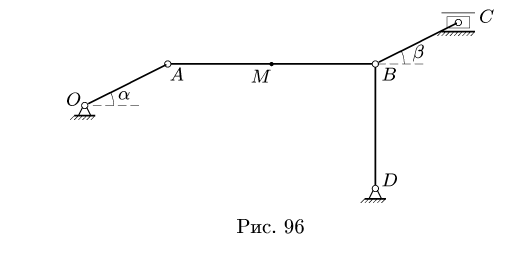
Задача №2
Плоский шарнирно-стержневой механизм состоит из четырех шарнирно соединенных стержней и горизонтально движущегося ползуна С (рис. 96). Механизм приводится в движение кривошипом OA, который вращается с постоянной угловой скоростью  = 2 рад/с. В указанном положении механизма найти ускорения шарниров А, В, С и точки М. Даны размеры: АО = 2 см, А В = 5 см,
= 2 рад/с. В указанном положении механизма найти ускорения шарниров А, В, С и точки М. Даны размеры: АО = 2 см, А В = 5 см, 
Решение
1. Определяем угловые скорости звеньев и скорости точек механизма. Находим величину скорости точки А:

Вектор  направляем перпендикулярно радиусу АО против часовой стрелки. Вектор скорости
направляем перпендикулярно радиусу АО против часовой стрелки. Вектор скорости  направлен горизонтально. Мгновенный центр скоростей Р звена АВ находится на пересечении перпендикуляров к векторам скоростей точек
направлен горизонтально. Мгновенный центр скоростей Р звена АВ находится на пересечении перпендикуляров к векторам скоростей точек  (рис. 97). Находим расстояния
(рис. 97). Находим расстояния
8.2. Ускорены точек многозвенного механизма
от точек А, В, М до МЦС:
Скорости точек находим из системы уравнений
В результате решения получаем
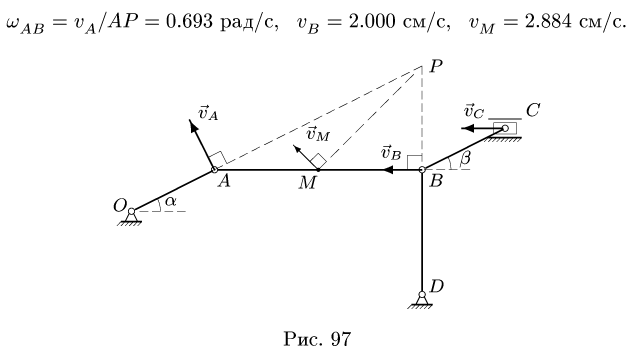
Найти скорость точки С не составит труда. Векторы  параллельны и не перпендикулярны отрезку ВС. Следовательно, звено ВС совершает мгновенно-поступательное движение, и скорости всех его точек в этот момент равны. Отсюда,
параллельны и не перпендикулярны отрезку ВС. Следовательно, звено ВС совершает мгновенно-поступательное движение, и скорости всех его точек в этот момент равны. Отсюда,  2 см/с. Угловая скорость звена ВС равна нулю.
2 см/с. Угловая скорость звена ВС равна нулю.
2. Определяем ускорение шарнира А, принадлежащего звену OA с известной постоянной угловой скоростью  . Ускорение точки А состоит только из нормальной составляющей,
. Ускорение точки А состоит только из нормальной составляющей,
 и направлено вдоль О А к центру О (рис. 98).
и направлено вдоль О А к центру О (рис. 98).
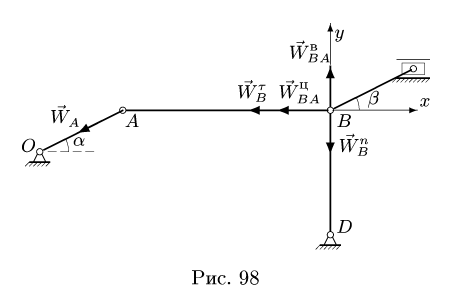
3. Находим ускорение точки В. Точка В движется по окружности с центром в неподвижном шарнире D, и ее ускорение можно представить в виде векторной суммы нормального и тангенциального ускорений:

С другой стороны, ускорение точки В выражается через ускорение точки А, лежащей на том же звене АВ. Рассматривая А в качестве полюса, имеем

Сравнивая (3) и (4), получаем, что

В проекциях на оси х, у (рис. 98) векторное уравнение (3) дает систем}’ двух уравнений относительно неизвестных 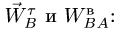

где 
Решаем систему (5):

Окончательно, величина ускорения точки В
8.2. Ускорены точек многозвенного механизма
Вычисление ускорения точки М выполняем по п.ЗВ плана решения. Действительно, угловая скорость и угловое ускорение звена А В уже известны:
Рассматривая А в качестве полюса (рис. 99), записываем векторное уравнение
где Из (6) определяем проекции
Из (6) определяем проекции  на оси координат:
на оси координат:

Величина ускорения точки M

Находим ускорение точки С. Скорости точек В я С звена ВС, совершающего мгновенно — поступательное движение, равны, однако, их ускорения различны.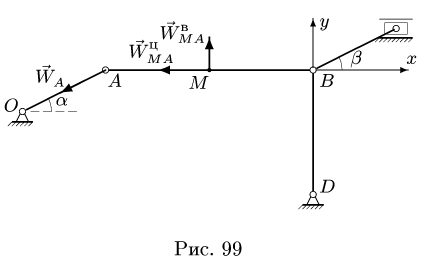
Для определения  воспользуемся векторным равенством (полюс — точка В)
воспользуемся векторным равенством (полюс — точка В)

 В качестве полюса можно также брать точку В, ускорение которой уже найдено.
В качестве полюса можно также брать точку В, ускорение которой уже найдено.
где Вектор
Вектор  раскладываем на составляющие (рис. 100)
раскладываем на составляющие (рис. 100)

Векторное уравнение (7) содержит две неизвестных величины: и
и Записывая (7) в проекциях на оси ху, получаем систему двух уравнений с двумя неизвестными. Но можно решить задачу проще.
Записывая (7) в проекциях на оси ху, получаем систему двух уравнений с двумя неизвестными. Но можно решить задачу проще.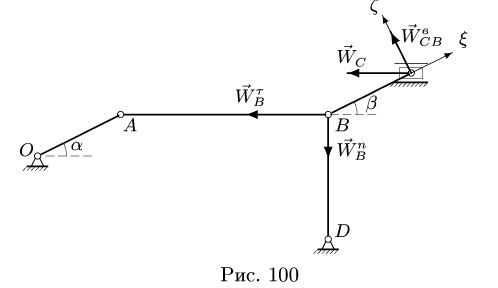
Спроецируем (7) на ось  направленную вдоль стержня ВС. При этом в уравнение не войдет модуль неизвестного вектора
направленную вдоль стержня ВС. При этом в уравнение не войдет модуль неизвестного вектора 

Находим
Результаты расчетов помещаем в таблицу (скорости в см/с, ускорения в см/

8.3. Уравнение трех угловых скоростей
Постановка задачи. Подобрать длины звеньев шарнирного четырехзвенника так, чтобы в некоторый момент движения угловые скорости его звеньев были бы равны заданным. Положение опорных шарниров четырехзвенника известно.
План решения:
Под угловыми скоростями будем понимать проекции соответствующих векторов на ось  перпендикулярную плоскости движения. Индекс
перпендикулярную плоскости движения. Индекс  дополнительно указывать не будем, принимая
дополнительно указывать не будем, принимая 
1. Последовательно нумеруем шарниры и звенья механизма. Выбираем систему координат, помещая ее начало в один из шарниров механизма. Определяем координаты шарниров.
2. Записываем уравнения трех угловых скоростей

где  — координаты шарниров на концах звена, имеющего угловую скорость
— координаты шарниров на концах звена, имеющего угловую скорость  Шарниры 1 и 4 — опорные. Все угловые скорости и некоторые координаты даны в условии.
Шарниры 1 и 4 — опорные. Все угловые скорости и некоторые координаты даны в условии.
3. Решаем систему (1) относительно неизвестных координат. Определяем длины звеньев механизма (расстояния между шарнирами) по формулам

Задача №3
В положении, изображенном на рис. 101, известны угловые скорости шарнирного четырехзвенника О ABC:  = 2 рад/с,
= 2 рад/с,  рад/с. Найти длины звеньев OA и ВС,
рад/с. Найти длины звеньев OA и ВС,  . Расстояния даны в см, АВ = 60 см.
. Расстояния даны в см, АВ = 60 см.
Решение
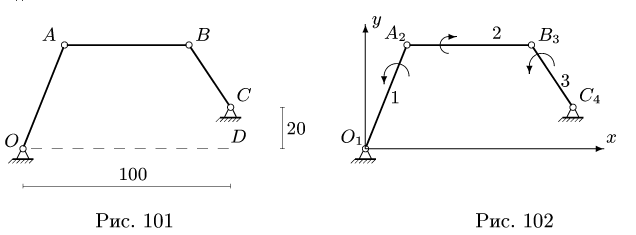
1. Последовательно нумеруем шарниры и звенья механизма. Номера шарниров указываем индексами у соответствующих букв. Выбираем систему координат, помещая ее начало в шарнир О. Определяем координаты шарниров (рис. 102):

2. Записываем уравнения трех угловых скоростей (1), где по условию 
 Уравнения следуют из координатной формы записи векторной формулы (1), на с. 130, для скоростей точек при плоском движении.
Уравнения следуют из координатной формы записи векторной формулы (1), на с. 130, для скоростей точек при плоском движении.
8.3. Уравнение трех угловых скоростей
 рад/с. Система приобретает вид
рад/с. Система приобретает вид

3. Решаем систему (2) относительно  Получаем
Получаем

Кроме того,  Определяем длины звеньев:
Определяем длины звеньев:
Уравнение трех угловых ускорений
Постановка задачи. Многозвенный механизм приводится в движение кривошипом, вращающимся с известной угловой скоростью и известным угловым ускорением. Найти угловые скорости и угловые ускорения звеньев механизма.
План решения:
Под угловыми скоростями и ускорениями будем понимать проекции соответствующих векторов на ось  перпендикулярную плоскости движения. Индекс
перпендикулярную плоскости движения. Индекс  дополнительно указывать не будем, принимая
дополнительно указывать не будем, принимая 
1. Нумеруем шарниры и звенья механизма. Выбираем систему координат, помещая ее начато в один из шарниров механизма. Определяем координаты шарниров.
2. Выделяем из механизма шарнирные четырехзвенники. Рассмотрим четырехзвенник, шарниры которого последовательно обозначены номерами  — номера неподвижных
— номера неподвижных
Гл. 8. Плоское движение тела
шарниров. Стержни четырехзвенника имеют номера  Записываем уравнения трех угловых скоростей:
Записываем уравнения трех угловых скоростей:

где  ( — угловая скорость
( — угловая скорость  -го звена,
-го звена,  — координаты его концов. Номера шарниров
— координаты его концов. Номера шарниров  как и номера звеньев
как и номера звеньев  не обязательно должны быть последовательными числами.
не обязательно должны быть последовательными числами.
3. Из решения (1) получаем все угловые скорости механизма.
4. Записываем уравнения трех угловых ускорений для каждого четырехзвенника *) :
где  — угловое ускорение
— угловое ускорение  -го звена.
-го звена.
5. Решаем (2) относительно неизвестных угловых ускорений.
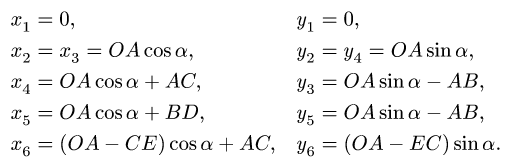
Задача №4
Многозвенный механизм приводится в движение кривошипом OA, вращающимся с угловой скоростью  = 1 рад/с и угловым ускорением
= 1 рад/с и угловым ускорением  (рис. 103).
(рис. 103).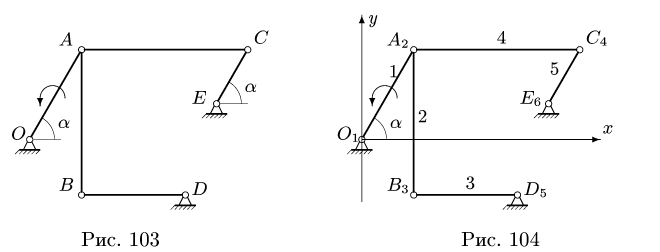
Дано:
 Найти угловые скорости и угловые ускорения звеньев механизма.
Найти угловые скорости и угловые ускорения звеньев механизма.
 Уравнения следуют из координатной формы записи векторной формулы (4), на с. 130, для ускорений точек при плоском движении.
Уравнения следуют из координатной формы записи векторной формулы (4), на с. 130, для ускорений точек при плоском движении.
8.4. Уравнение трех угловых ускорений
Решение
1. Нумеруем шарниры и звенья механизма (рис. 104). Выбираем систему координат, помещая ее начало в шарнир О. Определяем координаты шарниров:
2. Выделяем из механизма шарнирные четырехзвенники (рис. 105, 106). Записываем уравнения трех угловых скоростей для четырехзвенника OABD (рис. 105),

и для четырехзвенника О АСЕ (рис. 106),

(4)
3. Решаем систему четырех линейных уравнений (3), (4). Получаем угловые скорости звеньев:
 Из решения следует, что звено АС движется мгновенно-поступательно. Этот результат очевиден. Его можно было получить сразу из условия задачи, не решая ее. Действительно,
Из решения следует, что звено АС движется мгновенно-поступательно. Этот результат очевиден. Его можно было получить сразу из условия задачи, не решая ее. Действительно,  следовательно, векторы скоростей шарниров А и С также
следовательно, векторы скоростей шарниров А и С также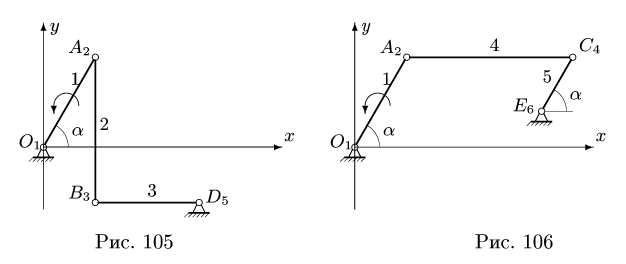
параллельны и но перпендикулярны АС. Мгновенного центра скоростей звена АС не существует (расположен в «бесконечности»), что соответствует 
4. Записываем уравнения трех угловых ускорений для четырех-звенника OABD (рис. 105),

и для четырехзвенника ОАСЕ (рис. 106),
5. Из решения (5,6) получаем угловые ускорения: 

Кинематические уравнения плоского движения
Постановка задачи. Составить кинематические уравнения плоского многозвенного механизма.
План решения:
1. Составляем кинематические графы механизма, выбирая наиболее короткие маршруты. Началом и концом графа должна быть точка с известной скоростью. Кинематические графы должны включать в себя все звенья механизма. Некоторые звенья могут входить в разные графы. Обозначения для графов приведены на с. 130.
8.5. Кинематические уравнения плоского движения
2. Записываем по два кинематических уравнения в проекциях на оси координат для каждого графа. Получаем систему дифференциальных уравнений.
3. Упрощаем систему уравнений, используя уравнения связей и тригонометрические формулы приведения.
Задача №5
Механизм состоит из стержней OA, АВ, CD и ползунов С и D. Ползун D движется вверх со скоростью  (рис. 107); BD = ВС. Составить кинематические уравнения механизма.
(рис. 107); BD = ВС. Составить кинематические уравнения механизма.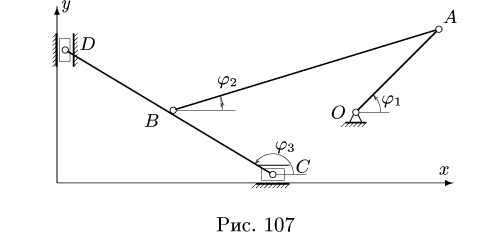
Решение
1. Составляем кинематические графы:
2. Записываем для каждого графа (1), (2) по два кинематических уравнения в проекциях на оси координат:
3. Упрощаем систему (3), используя уравнения связей,
 и тригонометрические
и тригонометрические
Гл. 8. Плоское движение тела
формулы приведения:
Задача №6
Плоский манипулятор состоит из жесткой детали ОАВ, стержней ВС, AM, колеса С и захвата М. Даны длины
 и скорость захвата
и скорость захвата 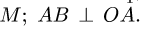
Составить кинематические уравнения манипулятора . Решение
1. Составляем кинематические графы:

2. Записываем по два кинематических уравнения в проекциях на оси координат для каждого графа (5):
 Задание K-3 из сборника [15]. В задании К-3 скорость точки М определяется из решения дифференциального уравнения так, чтобы манипулятор захватил деталь, движущуюся по известному закону. В рассматриваемом примере задача захвата не решается, а предполагается, что скорость М известна из других соображений, в том числе из условия захвата детали.
Задание K-3 из сборника [15]. В задании К-3 скорость точки М определяется из решения дифференциального уравнения так, чтобы манипулятор захватил деталь, движущуюся по известному закону. В рассматриваемом примере задача захвата не решается, а предполагается, что скорость М известна из других соображений, в том числе из условия захвата детали.
8.5. Кинематические уравнения плоского движения
3. Упрощаем систему (6), используя уравнения связей,
 и тригонометрические формулы приведения:
и тригонометрические формулы приведения:
Замечание 1. В данной задаче скорости точек механизма можно найти для некоторого промежутка времени, а не для фиксированного момента времени, как в аналогичных задачах § 8.1, § 8.3. Решая нелинейную систему дифференциальных уравнений (4), получаем полную картину движения механизма . Для решения системы (4) необходимо дополнить ее начальными условиями:

где константы и определяют начальную конфигурацию механизма. В некоторых численных методах для решения систему (4) требуется привести к форме Коши. Уравнения (4) представляют собой систему четырех алгебраических уравнений относительно
и определяют начальную конфигурацию механизма. В некоторых численных методах для решения систему (4) требуется привести к форме Коши. Уравнения (4) представляют собой систему четырех алгебраических уравнений относительно  Решая систему, получаем, что
Решая систему, получаем, что
Замечание 2. В решении задачи следует использовать наиболее короткие графы. В данном случае вместо графа (2) можно было бы выбрать граф
Система дифференциальных уравнений изменится, однако в форме Коши ее вид останется прежним.
 На странице Интернет кафедры теоретической механики МЭИ www.termech.mpei.ac.ru можно найти обучающую программу ROBBY2, разработанную Осадченко Н.В. и Корецким А.В. Программа интегрирует уравнения (4), составленные- для задач из сборника [15], анимирует полученное решение и представляет результаты в виде графиков и таблиц.
На странице Интернет кафедры теоретической механики МЭИ www.termech.mpei.ac.ru можно найти обучающую программу ROBBY2, разработанную Осадченко Н.В. и Корецким А.В. Программа интегрирует уравнения (4), составленные- для задач из сборника [15], анимирует полученное решение и представляет результаты в виде графиков и таблиц.
Замечание 3. Метод графов широко используется для решения задач кинематики и динамики. Примеры составления графов представлены также на с. 243, 244 310, 313, 316, 327, 329.
Замечание 4. Для того, чтобы проинтегрировать полученные кинематические уравнения, необходимо скорости ползунов выразить через соответствующие координаты, например,  задать одну из пяти функций, входящих в уравнения, и выбрать для остальных функций начальные условия.
задать одну из пяти функций, входящих в уравнения, и выбрать для остальных функций начальные условия.
Предупреждение типичных ошибок:
- Кинематические графы являются ориентированными графами. Меняя направление маршрута, меняйте и угол. Следующие два графа
- эквивалентны:

- Угловая скорость звена, которому принадлежат точки А и В графа , не обязательно равна см., например, с. 243.
 , не обязательно равна
, не обязательно равна  см., например, с. 243.
см., например, с. 243.- Принцип виртуальных перемещений
- Аксиомы и теоремы статики
- Система сходящихся сил
- Моменты силы относительно точки и оси
- Равновесие вала
- Определение усилий в стержнях, поддерживающих плиту
- Тело на сферической и стержневых опорах
- Приведение системы сил к простейшему виду
Содержание:
- Плоское движение тела
- Определение скоростей точек тела
- Уравнения плоского движения
- Скорости точек фигуры. Мгновенный центр скоростей
- Определение положения мгновенного центра скоростей
- Порядок решения задач на тему: Определение скоростей точек тела
- Примеры решения задач на тему: Определение скоростей точек тела
- Решение задачи графоаналитическим способом
- Решение задачи с помощью мгновенного центра скоростей
- Определение ускорений точек тела
- Ускорения точек плоской фигуры
- Порядок решения задач на тему: Определение ускорений точек тела
- Примеры решения задач на тему: Определение ускорений точек тела
- План скоростей
- Порядок решения задач на тему: План скоростей
- Примеры решения задач на тему: План скоростей
- План ускорений
- Примеры решения задач на тему: План ускорений
Плоское движение тела — это такое движение, при котором все его точки перемещаются параллельно некоторой неподвижной плоскости.
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Плоское движение тела
Плоскопараллельное движение (плоское движение) — вид движения абсолютно твёрдого тела, при котором траектории всех точек тела располагаются в плоскостях, параллельных заданной плоскости. Примером плоскопараллельного движения по отношению к вертикальной плоскости, относительно которой тело движется в параллельном направлении, является качение колеса по горизонтальной дороге
Определение скоростей точек тела
Скорости точек тела пропорциональны их расстояниям до мгновенного центра скоростей, и это отношение определяет угловую скорость тела в данный момент времени: Частные случаи определения положения мгновенного центра скоростей. Если плоскопараллельное движение осуществляется путем качения без скольжения одного цилиндрического тела по поверхности другого, то точка касания Р имеет в данный момент времени скорость равную нулю, и, следовательно является мгновенным центром скоростей .
Уравнения плоского движения
Плоским называется такое движение тела, при котором траектории всех его точек лежат в плоскостях, параллельных данной неподвижной плоскости.
При таком движении все точки твердого тела, лежащих на перпендикуляре к этой плоскости, имеют одинаковые траектории, скорости и ускорения.
Плоское движение фигуры можно рассматривать как сложное (то есть, абсолютное) движение, которое включает поступательное движение вместе с произвольно выбранной точкой  , что называется полюсом (переносное движение), и на вращательное движение фигуры вокруг этой точки (относительное движение).
, что называется полюсом (переносное движение), и на вращательное движение фигуры вокруг этой точки (относительное движение).
На рис.4.1 с телом  связана подвижная система координат
связана подвижная система координат  . При движении тела начало координат
. При движении тела начало координат  и угол поворота
и угол поворота  подвижной системы координат относительно неподвижной системы
подвижной системы координат относительно неподвижной системы  со временем меняются. Таким образом, чтобы однозначно задать положение тела при плоском движении нужно задать закон движения начала подвижной системы координат (полюса ) и угол поворота подвижной системы относительно неподвижной системы координат, то есть:
со временем меняются. Таким образом, чтобы однозначно задать положение тела при плоском движении нужно задать закон движения начала подвижной системы координат (полюса ) и угол поворота подвижной системы относительно неподвижной системы координат, то есть:

Уравнения (4.1) называются уравнениями плоского движения твердого тела.
При этом, поступательная часть плоского движения описывается двумя уравнениями:

а относительная вращательная вокруг полюса — третьим уравнением:

Координаты любой точки  плоской фигуры
плоской фигуры  (рис.4.1), если за полюс выбрана точка и задан угол
(рис.4.1), если за полюс выбрана точка и задан угол  , определяются по уравнениям:
, определяются по уравнениям:


Скорости точек фигуры. Мгновенный центр скоростей
Поскольку плоское движение тела состоит из поступательного вместе с полюсом и вращательного вокруг него, то скорость любой точки тела (рис.4.2) геометрически состоит из абсолютной скорости  точки , которую принято за полюс, и относительной скорости
точки , которую принято за полюс, и относительной скорости  в относительном вращательном движении точки вместе с телом вокруг полюса :
в относительном вращательном движении точки вместе с телом вокруг полюса :


Вектор относительной скорости точки в относительном вращательном движении вместе с телом вокруг полюса направлен перпендикулярно  в сторону угловой скорости.
в сторону угловой скорости.
Модуль и направление абсолютной скорости  находится построением соответствующего параллелограмма на векторах и (рис.4.2). Таков путь решения векторного уравнения, когда по записанному уравнению строят векторную фигуру, называется графоаналитическим.
находится построением соответствующего параллелограмма на векторах и (рис.4.2). Таков путь решения векторного уравнения, когда по записанному уравнению строят векторную фигуру, называется графоаналитическим.
Относительная скорость в относительном вращательном движении точки вместе с телом вокруг полюса по модулю равна:

где  — угловая скорость вращения тела вокруг полюса.
— угловая скорость вращения тела вокруг полюса.
Найти скорость любой точки тела можно также на основе теоремы, которая гласит:
Проекции скоростей двух точек фигуры на прямую, что соединяет эти точки, равны между собой.
Согласно этой теореме (рис.4.3) :

или


Если известна скорость  точки тела, то:
точки тела, то:

При плоском движении тела в каждый момент времени существует точка тела, скорость которой равна нулю. Эта точка называется мгновенным центром скоростей и, как правило, обозначается буквой  .
.
Если мгновенный центр скоростей известен, то легко можно найти мгновенное распределение скоростей всех точек тела (рис.4.4).

Выберем за полюс поступательного движения мгновенный центр скоростей . Тогда для точек и  тела можно записать векторные уравнения (4.3):
тела можно записать векторные уравнения (4.3):

где  — вектор абсолютной скорости полюса ;
— вектор абсолютной скорости полюса ;
 — вектор относительной скорости точки в относительном вращательном движении вместе с телом вокруг полюса , направлен перпендикулярно
— вектор относительной скорости точки в относительном вращательном движении вместе с телом вокруг полюса , направлен перпендикулярно  ;
;
 — вектор относительной скорости точки в относительном вращательном движении вместе с телом вокруг полюса , направлен перпендикулярно
— вектор относительной скорости точки в относительном вращательном движении вместе с телом вокруг полюса , направлен перпендикулярно  .
.
Поскольку скорость выбранного полюса равна нулю  , то:
, то:

По модулю скорости вращения точек и вокруг полюса  равны:
равны:

Разделив  на
на  получим:
получим:

Таким образом, мгновенное распределение скоростей точек тела при его плоском движении, такое же, какое было бы при его вращательном движении вокруг мгновенного центра скоростей.
Определение положения мгновенного центра скоростей
Существует несколько способов нахождения положения мгновенного центра скоростей.
Случай 1. Известна скорость одной точки тела и угловая скорость его вращения (рис.4.5).

Мгновенный центр скоростей лежит на перпендикуляре к скорости точки , на расстоянии:

Для нахождения направления перпендикуляра надо повернуть вектор относительно точки на угол  в сторону угловой скорости.
в сторону угловой скорости.
Случай 2. Известны направления скоростей и  двух точек и тела (рис.4.6).
двух точек и тела (рис.4.6).

Мгновенный центр скоростей должен лежать как на перпендикуляре к вектору , так и на перпендикуляре к вектору , то есть мгновенный центр скоростей лежит в точке пересечения этих перпендикуляров.
Случай 3. Скорости двух точек и тела параллельны между собой, а перпендикуляры к ним не совпадают (рис.4.7).

Говорят, что в этом случае мгновенный центр скоростей лежит на бесконечности. Угловая скорость вращения равна нулю, а скорости всех точек тела геометрически равны, то есть в данный момент времени тело выполняет поступательное движение.
Случай 4. Скорости двух точек и параллельны, направлены в одну сторону и не равны по модулю. Кроме того, и перпендикулярны отрезку  (рис.4.8).
(рис.4.8).

Мгновенный центр скоростей находится на продолжении отрезка той точки, скорость которой меньше. Расстояние от точки к мгновенному центру скоростей можно найти из пропорции (4.6):

Решив это уравнение относительно  , получим:
, получим:

Таким образом, для определения положения мгновенного центра скоростей надо знать не только направления скоростей, но и их величину.
Случай 5. Скорости двух точек и тела параллельны друг другу, перпендикулярны отрезку , но направлены в разные стороны (рис.4.9).

Мгновенный центр скоростей лежит на отрезке и делит его на части пропорциональные скоростям. Поскольку  , то по формуле (4.6) можно записать:
, то по формуле (4.6) можно записать:

Решив уравнение относительно  , получим:
, получим:

Таким образом, для нахождения положения мгновенного центра скоростей надо знать величины и направления скоростей обеих точек.
Случай 6. Тело катится без проскальзывания по неподвижной поверхности (рис.4.10).

В этом случае мгновенный центр скоростей находится в точке прикосновения тела к поверхности. Действительно, если отсутствует скольжение тела относительно поверхности, то скорости точек прикосновения тела и поверхности должны быть одинаковыми. Но скорости точки  , принадлежащей неподвижной поверхности, равна нулю.
, принадлежащей неподвижной поверхности, равна нулю.
Тогда и скорость точки , которой в данный момент времени движущееся тело прикасается к неподвижной поверхности, тоже равна нулю.
Порядок решения задач на тему: Определение скоростей точек тела
а) решение графоаналитическим методом:
- выбрать за полюс ту точку тела, скорость которой известна по величине и направлению или легко определяется из условий задачи;
- найти точку тела, направление скорости которой известно;
- пользуясь формулами плоского движения найти скорость этой точки;
- определить угловую скорость тела в данный момент времени;
- по известной угловой скорости и скорости полюса, пользуясь формулами плоского движения найти скорости других точек тела.
б) решение с помощью мгновенного центра скоростей:
- определить положение мгновенного центра скоростей одним из известных способов;
- определить значение мгновенного радиуса той точки тела, скорость которой известна, и найти угловую скорость тела;
- найти скорости других точек тела.
Примеры решения задач на тему: Определение скоростей точек тела
Задача №1
Стержень (рис.4.11) длиной  выполняет плоское движение. Вектор скорости точки образует угол
выполняет плоское движение. Вектор скорости точки образует угол  с осью стержня и в данный момент времени равен
с осью стержня и в данный момент времени равен  . Вектор скорости точки в этот же момент времени образует угол
. Вектор скорости точки в этот же момент времени образует угол  с осью стержня.
с осью стержня.

Определить величину скорости точки , положение мгновенного центра скоростей, угловую скорость стержня и скорость точки  , которая лежит на середине стержня.
, которая лежит на середине стержня.
Решение задачи графоаналитическим способом
1. Выберем за полюс точку (рис.4.11), поскольку известны направление и величина скорости этой точки.
2. Используя формулу распределения скоростей при плоском движении, запишем векторное уравнение для определения скорости точки :

где — скорость полюса точки ;
 — относительная скорость точки в ее относительном вращательном движении вместе с телом вокруг полюса .
— относительная скорость точки в ее относительном вращательном движении вместе с телом вокруг полюса .
Данное векторное уравнение можно решить построением векторного треугольника скоростей (рис.4.12). Для этого из произвольной точки плоскости  надо построить правую и левую часть векторного уравнения (1).
надо построить правую и левую часть векторного уравнения (1).

При построении правой части уравнения (1) из точки в произвольном масштабе отложим вектор скорости , который является известным и по величине и по направлению. К вектору надо добавить вектор относительной скорости  , направление которого является известным, поскольку скорость точки у ее относительном вращательном движении вокруг полюса перпендикулярна радиусу вращения, в данном случае радиус вращения — отрезок . Величина вектора неизвестна и поэтому через точку
, направление которого является известным, поскольку скорость точки у ее относительном вращательном движении вокруг полюса перпендикулярна радиусу вращения, в данном случае радиус вращения — отрезок . Величина вектора неизвестна и поэтому через точку  проводится только его направление (прямая
проводится только его направление (прямая  рис.4.12).
рис.4.12).
Теперь из точки построим левую часть уравнения (1). Направление скорости точки является известным (по условию задачи), но неизвестна ее величина, и потому, из точки проводим линию параллельную  .
.
Точка  пересечения прямых, параллельных и , и будет решением данного векторного уравнения.
пересечения прямых, параллельных и , и будет решением данного векторного уравнения.
В результате построения получили замкнутый треугольник скоростей, стороны которого в выбранном масштабе определяют искомую скорость точки и относительную скорость этой же точки при ее вращении вместе с телом вокруг полюса .
В этом треугольнике известны все углы и одна сторона . С треугольника  находим:
находим:

3. Определим угловую скорость вращения стержня . Поскольку  , то :
, то :

4. Найдем скорость точки  , лежащей посередине отрезка . Для этого запишем формулу для скорости точки
, лежащей посередине отрезка . Для этого запишем формулу для скорости точки  относительно того же самого полюса точки :
относительно того же самого полюса точки :

где — скорость полюса точки ;
 — относительная скорость точки в ее относительном вращательном движении вместе с телом вокруг полюса .
— относительная скорость точки в ее относительном вращательном движении вместе с телом вокруг полюса .
Скорость имеет то же направление, что и , а по модулю равна:

Отложив от точки (рис.4.12) вектор , равный половине вектора , получим точку  . Вектор, проведенный из точки начала построения (точки ) в точку изображает скорость
. Вектор, проведенный из точки начала построения (точки ) в точку изображает скорость  точки
точки  .
.
Поскольку стороны  и
и  треугольника
треугольника  равны между собой
равны между собой  и угол между ними
и угол между ними  , то треугольник равносторонний. Таким образом:
, то треугольник равносторонний. Таким образом: 
Решение задачи с помощью мгновенного центра скоростей
1. Определим положение мгновенного центра скоростей. Для этого с точек и (рис.4.13) проведем перпендикуляры к скоростям и . Пересечение этих перпендикуляров (точка ) будет мгновенным центром скоростей.

2. Определим мгновенные радиусы. Поскольку треугольник  прямоугольный, то:
прямоугольный, то:

3. Вычислим угловую скорость вращения фигуры вокруг мгновенного центра скоростей:

4. Найдем скорости точек и :

где  — мгновенный радиус точки , поскольку треугольник равносторонний (
— мгновенный радиус точки , поскольку треугольник равносторонний ( угол между ними
угол между ними  ), то
), то 
Если надо было бы определить только величину скорости , то можно было бы воспользоваться теоремой о равенстве проекций двух точек плоской фигуры на прямую, соединяющую эти точки:

Тогда:

Ответ: 
Задача №2
Колесо радиусом  катится по горизонтальной поверхности. В момент рассматриваемого времени скорость центра
катится по горизонтальной поверхности. В момент рассматриваемого времени скорость центра  и угловая скорость колеса
и угловая скорость колеса  (рис.4.14).
(рис.4.14).
Определить: скорости точек ,  и
и  , которые лежат на концах вертикального и горизонтального диаметров.
, которые лежат на концах вертикального и горизонтального диаметров.

Решение.
1. В качестве полюса выберем точку , направление и величина скорости которой известны.
2.Используя формулу распределения скоростей точек тела при плоском движении определяем скорости других точек колеса.
Для точки колеса:

где  — относительная скорость точки в ее относительном вращательном движении вокруг полюса .
— относительная скорость точки в ее относительном вращательном движении вокруг полюса .
По модулю равна:

Скорость направлена перпендикулярно  в сторону угловой скорости, то есть по направлению и
в сторону угловой скорости, то есть по направлению и  будут совпадать.
будут совпадать.
Из точки (рис.4.14) строим уравнение (1): откладываем вектор , а с его конца по тому же направлению .
Тогда:

Векторное уравнение для определения скорости точки  , будет иметь вид:
, будет иметь вид:

где  — скорость точки в ее вращательном движении вокруг полюса .
— скорость точки в ее вращательном движении вокруг полюса .
Эта скорость параллельна скорости , но будет направлена в противоположную сторону и по модулю равна:

Из точки (рис.4.14) строим векторное уравнение (2): откладываем вектор , а с его конца в противоположную сторону .
Поскольку векторы коллинеарны, то:

Таким образом, скорость точки равна  и направлена в противоположную сторону от . Колесо катится со скольжением по поверхности.
и направлена в противоположную сторону от . Колесо катится со скольжением по поверхности.
Составляем векторное уравнение для определения скорости точки :

где  — относительная скорость точки в ее относительном вращательном движении вокруг полюса .
— относительная скорость точки в ее относительном вращательном движении вокруг полюса .
По модулю равна:

Скорость направлена перпендикулярно  в сторону угловой скорости , то есть вертикально вниз.
в сторону угловой скорости , то есть вертикально вниз.
Из точки (рис.4.14) строим уравнение (3): откладываем вектор  , а с его конца вектор вертикально вниз. Соединив точку с концом вектора получим вектор
, а с его конца вектор вертикально вниз. Соединив точку с концом вектора получим вектор  скорости точки .
скорости точки .
Поскольку векторы и между собой перпендикулярны, то вектор является гипотенузой прямоугольного треугольника:

Ответ: 
Задача №3
Колесо радиусом катится без проскальзывания по горизонтальной поверхности со скоростью центра колеса 
Определить: скорости точек , ,  (рис.4.15).
(рис.4.15).

Решение. Решим задачу с помощью мгновенного центра скоростей.
1. Определим положение мгновенного центра скоростей. Поскольку колесо катится по неподвижной поверхности, то мгновенный центр скоростей находится в точке прикосновения колеса к неподвижной поверхности.
2. Мгновенный радиус для точки равен  . Тогда с формулы (4.4) получим угловую скорость колеса:
. Тогда с формулы (4.4) получим угловую скорость колеса:

Направлена угловая скорость по ходу часовой стрелки.
3. Определим величину и направление скоростей точек , , .
Соединим точки , , с мгновенным центром скоростей . Векторы скоростей  ,
,  и
и  будут направлены перпендикулярно мгновенным радиусам
будут направлены перпендикулярно мгновенным радиусам  и
и  , соответственно.
, соответственно.
По модулю скорости будут равны:

где

Ответ: 
Задачи, которые рекомендуются для самостоятельной работы: 16.2; 16.4; 16.11; 16.12 [2]
Определение ускорений точек тела
Теорема: ускорение любой точки плоской фигуры равно геометрической сумме ускорения полюса и ускорения этой точки во вращательном движении фигуры вокруг полюса.
Ускорения точек плоской фигуры
Формула распределения ускорений при плоском движении тела имеет вид:

где  — ускорение полюса, точки , в поступательном движении;
— ускорение полюса, точки , в поступательном движении;
 — относительное ускорение точки в ее вращательном движении вместе с телом вокруг полюса ;
— относительное ускорение точки в ее вращательном движении вместе с телом вокруг полюса ;
 — ускорение любой точки тела.
— ускорение любой точки тела.
Ускорение любой точки плоской фигуры равно геометрической сумме ускорения точки, которую выбрано за полюс, и ускорения точки при его вращении вместе с телом вокруг этого полюса.
Графическое определение ускорения точки выполняется следующим образом (рис.4.16):


Вычисление величины ускорения точки с помощью рассматриваемого параллелограмма затрудняет расчеты, поскольку предварительно надо определить угол между векторами  и
и  .
.
Учитывая, что представляет собой относительное ускорение точки в ее относительном вращательном движении вокруг полюса , то это ускорение можно разложить на относительную тангенциальную (касательную) и относительную нормальную (центростремительную) составляющие:

где

Вектор  направлен перпендикулярно
направлен перпендикулярно  в сторону углового ускорения, а вектор
в сторону углового ускорения, а вектор  всегда направлен от точки к выбранному полюсу (рис.4.17).
всегда направлен от точки к выбранному полюсу (рис.4.17).
Тогда уравнение (4.10) примет вид:

Если точка , которая выбрана за полюс поступательного движения, движется не прямолинейно, то ее ускорение, в свою очередь, тоже можно разложить на тангенциальную  и нормальную
и нормальную  составляющие:
составляющие:


Порядок решения задач на тему: Определение ускорений точек тела
1. Выбрать точку, которая будет полюсом при записи уравнения плоского движения (как правило выбирают точку, ускорение которой известно).
2. Записать векторное уравнение распределения ускорений.
3. Спроектировать уравнение распределения ускорений на две взаимно перпендикулярные оси, одна из которых совпадает с нормальным ускорением, а вторая – с тангенциальным.
4. Определить мгновенное угловое ускорение плоской фигуры.
5. Найти искомые ускорения точек с помощью уравнения распределения ускорений.
Примеры решения задач на тему: Определение ускорений точек тела
Задача №1
Прямоугольная (рис.4.18, а) пластина  движется в плоскости чертежа. Ускорение точки в данный момент времени равно
движется в плоскости чертежа. Ускорение точки в данный момент времени равно  и образует с прямой угол
и образует с прямой угол  .
.
Ускорение точки составляет  и образует угол
и образует угол  с прямой
с прямой  .
.

Определить мгновенную угловую скорость и мгновенное угловое ускорение пластины, и ускорение точки  , если
, если 
Решение.
1. Выберем за полюс точку , поскольку ее ускорение известно (задано в исходных данных).
2. Составим векторное уравнение для ускорения точки пластины:

где  — относительное нормальное ускорение точки в ее вращательном движении вместе с телом вокруг точки . Вектор этого ускорения направлен от точки к точке и по модулю равен:
— относительное нормальное ускорение точки в ее вращательном движении вместе с телом вокруг точки . Вектор этого ускорения направлен от точки к точке и по модулю равен: 
 — относительное тангенциальное (касательное) ускорение точки в ее вращении вместе с телом вокруг точки . Направлен вектор этого ускорения перпендикулярно в сторону углового ускорения и по модулю равен
— относительное тангенциальное (касательное) ускорение точки в ее вращении вместе с телом вокруг точки . Направлен вектор этого ускорения перпендикулярно в сторону углового ускорения и по модулю равен  .
.
Поскольку направление углового ускорения неизвестное, то направлением на рис. 4.18,а задаемся.
3. Спроектируем составленное уравнение (1) на оси  и
и  .
.
В проекции на ось получим:

В проекции на ось :

4. Из уравнения (2) получим величину нормального ускорения:

Найдем мгновенную угловую скорость фигуры:

5. Из уравнения (3) получим величину тангенциального ускорения:

Угловое ускорение фигуры:

Поскольку величина положительная, то направление тангенциального, а соответственно и углового ускорений выбрано верно.
6. Определим ускорение точки  .
.
Для вычисления ускорения точки лучше за полюс выбрать точку , поскольку ускорение этой точки уже известно и задана сторона  прямоугольника:
прямоугольника:

Направление векторов  и
и  показано на рис. 4.18,б.
показано на рис. 4.18,б.
Спроектируем записанное уравнение на оси и :

где

Полное ускорение точки :

Ответ: 

Задача №2
Равносторонний треугольник  движется в плоскости чертежа. Ускорение вершин и в данный момент времени равны
движется в плоскости чертежа. Ускорение вершин и в данный момент времени равны  и направлены вдоль сторон треугольника (рис.4.19).
и направлены вдоль сторон треугольника (рис.4.19).
Определить ускорение вершины .
Решение. Если известны ускорения двух точек плоской фигуры, например и , то задачу рекомендуется решать в следующей последовательности:
1. Рассматривая первую точку как полюс поступательного движения, записать векторное уравнение распределения ускорений при плоском движении для точки и спроектировать это уравнение на прямую , соединяющую обе точки.
2. Из уравнения проекций определить величину нормального ускорения  и значение угловой скорости фигуры .
и значение угловой скорости фигуры .
3. Спроектировать векторное уравнение распределения ускорений при плоском движении на прямую, которая перпендикулярна , и определить из уравнения проекций величину тангенциального ускорения и значение углового ускорения фигуры  .
.
4. Если нужно, то, используя формулу распределения ускорений при плоском движении, определить ускорение любой другой точки плоской фигуры.
Решим задачу, придерживаясь приведенной последовательности.
1. Выберем за полюс точку . Для точки треугольника можно записать:

где  — относительное нормальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено вдоль
— относительное нормальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено вдоль  от точки к точке ;
от точки к точке ;
— относительное тангенциальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено перпендикулярно , направлением задаемся (рис.4.19).
Спроектируем записанное равенство (1) на прямую :


2. Откуда:

Поскольку  то:
то:

3. Спроектируем векторное уравнение на прямую, которая перпендикулярна :

Откуда:

Учитывая то, что  , получим:
, получим:

Поскольку величина тангенциального ускорения положительная, то его направление на рис. 4.19 выбрано верно. Отсюда следует, что угловое ускорение направлено против хода часовой стрелки.
4. Определим ускорение точки , приняв за полюс точку :

где  — относительное нормальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено вдоль
— относительное нормальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено вдоль  от точки к точке ;
от точки к точке ;
 — относительное тангенциальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено перпендикулярно в сторону углового ускорение фигуры
— относительное тангенциальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено перпендикулярно в сторону углового ускорение фигуры  .
.
Учитывая, что  , определим модули относительного нормального и тангенциального ускорений:
, определим модули относительного нормального и тангенциального ускорений:

От точки (рис.4.20) отложим векторы ускорений, которые составляют правую часть уравнения (2).
Выберем систему координат  , причем ось
, причем ось  направим вдоль стороны
направим вдоль стороны  треугольника.
треугольника.
Спроектируем равенство (2) на оси выбранной системы координат:

Подставляя числовые данные, получим:

Таким образом, ускорение вершины треугольника равно:

Поскольку проекция ускорения  на ось
на ось  равна нулю и величина проекции на ось положительная, то вектор ускорения точки будет направлен вдоль стороны треугольника от точки к точке .
равна нулю и величина проекции на ось положительная, то вектор ускорения точки будет направлен вдоль стороны треугольника от точки к точке .
Ответ: 
Задача № 3
В шарнирном механизме (рис.4.21) в данный момент времени угловая скорость и угловое ускорение кривошипа  равны
равны  Точка механизма движется по дуге окружности радиусом
Точка механизма движется по дуге окружности радиусом  и в момент времени, что рассматривается, лежит на прямой
и в момент времени, что рассматривается, лежит на прямой  .
.

Найти ускорение точки и мгновенное угловое ускорение шатуна , если 
Решение. Скорость точки кривошипа, который вращается вокруг точки равен:

Направлена скорость перпендикулярно в сторону угловой скорости  (рис.4.21).
(рис.4.21).
Точка  шатуна вращается вокруг центра
шатуна вращается вокруг центра  и ее линейная скорость направлена перпендикулярно
и ее линейная скорость направлена перпендикулярно  .
.
Поскольку скорости точек и шатуна параллельны, то мгновенный центр скоростей шатуна лежит в бесконечности и мгновенное движение шатуна является поступательным, то есть

Ускорение точки равно геометрической сумме нормального и тангенциального ускорений:

где

Направления ускорений  и
и  показаны на рис.4.21.
показаны на рис.4.21.
Выберем точку за полюс для шатуна . Тогда для точки шатуна:

или

где  — относительное нормальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено вдоль
— относительное нормальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено вдоль  от точки к точке ,
от точки к точке , 
— относительное тангенциальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено перпендикулярно , направлением задаемся (рис.4.22), 
Свяжем с точкой прямоугольную систему координат  (рис.4.22) и спроектируем уравнение (1), помня, что
(рис.4.22) и спроектируем уравнение (1), помня, что  , на оси выбранной системы координат:
, на оси выбранной системы координат:

С другой стороны, при движении точки по дуге окружности радиуса  , точка приобретет ускорения
, точка приобретет ускорения  :
:

где  — нормальное ускорение точки в ее вращательном движении вокруг точки направлено к центру вращения;
— нормальное ускорение точки в ее вращательном движении вокруг точки направлено к центру вращения;
 — тангенциальное ускорение точки в ее вращательном движении вокруг точки , направлено перпендикулярно
— тангенциальное ускорение точки в ее вращательном движении вокруг точки , направлено перпендикулярно  , задаемся направлением (рис.4.22).
, задаемся направлением (рис.4.22).

По величине нормальное и тангенциальное ускорения соответственно равны:

Спроектируем уравнение (4) на оси выбранной системы координат:

Подставим в (3) все рассчитанные величины:

Поскольку

то

Положительное значение величины  указывает на то, что направление было выбрано верно.
указывает на то, что направление было выбрано верно.
Угловое ускорение тела равно:

Угловое ускорение  направлено в сторону , то есть против хода часовой стрелки.
направлено в сторону , то есть против хода часовой стрелки.
Для определения тангенциального ускорения  в уравнение (2) подставим
в уравнение (2) подставим  из (5):
из (5):

Откуда

Поскольку величина  отрицательная, то направление тангенциального ускорения выбрано не в ту сторону.
отрицательная, то направление тангенциального ускорения выбрано не в ту сторону.
Полное ускорение точки :

Ответ: 
Задачи, которые рекомендуются для самостоятельной работы: 18.12; 18.14; 18.22 [2].
План скоростей
План скоростей и план ускорений – физическое изображение векторных уравнений, связывающих скорости и ускорения точек механизма. Изображение механизма, выполненное с помощью условных обозначений (см. выше) называется структурной схемой механизма.
Определение скоростей различных точек движущейся плоской фигуры легко может быть выполнено графически с помощью построения плана скоростей.
План скоростей – это графическое изображение из единого центра (полюса) векторов абсолютных скоростей точек фигуры в фиксированный момент ее движения.
План скоростей может быть построен, если:
- известная скорость одной точки плоской фигуры и направление скорости другой точки;
- известная скорость одной точки плоской фигуры и мгновенная угловая скорость фигуры
Пусть известные скорости , ,  и
и  , вершин прямоугольника
, вершин прямоугольника  (рис. 4.23, а). Для построения плана скоростей с произвольной точки
(рис. 4.23, а). Для построения плана скоростей с произвольной точки  (рис.4.23,б), которая называется полюсом плана скоростей, отложим направленные отрезки
(рис.4.23,б), которая называется полюсом плана скоростей, отложим направленные отрезки  и
и  , которые в выбранном масштабе будут изображать скорости , , и . Полученные точки
, которые в выбранном масштабе будут изображать скорости , , и . Полученные точки  и
и  , которые называются вершинами плана скоростей, соединим между собой прямыми линиями.
, которые называются вершинами плана скоростей, соединим между собой прямыми линиями.

Установим свойства и правила построения плана скоростей.
По уравнению распределения скоростей при плоском движении фигуры, если за полюс принять точку , то для точки получим:

где — вектор абсолютной скорости точки ;
— вектор относительной скорости точки в относительном вращательном движении вместе с телом вокруг точки , направлена перпендикулярно и по модулю равна 
С другой стороны для векторов треугольника  плана скоростей (рис.4.23,б) можно записать:
плана скоростей (рис.4.23,б) можно записать:

Учитывая, что векторы  и
и  изображают в выбранном масштабе абсолютные скорости и и, сравнивая уравнения (4.14) и (4.15), можно сделать вывод, что отрезок
изображают в выбранном масштабе абсолютные скорости и и, сравнивая уравнения (4.14) и (4.15), можно сделать вывод, что отрезок  изображает в масштабе скорость .
изображает в масштабе скорость .
Таким образом, отрезок  плана скоростей направлен перпендикулярно стороне фигуры и по модулю равен:
плана скоростей направлен перпендикулярно стороне фигуры и по модулю равен:

где  — масштабный коэффициент, который принят при построении плана скоростей.
— масштабный коэффициент, который принят при построении плана скоростей.
Аналогично:

Отсюда мгновенная скорость вращения плоской фигуры:

Вектор согласно уравнению (4.14) направлен на плане скоростей от точки  к точке
к точке  . Если этот вектор перенести в точку фигуры, то можно определить направление вращения точки вокруг точки вместе с фигурой (в данном случае, по ходу часовой стрелки). Направление же мгновенной угловой скорости плоской фигуры будет совпадать с направлением ее вращения.
. Если этот вектор перенести в точку фигуры, то можно определить направление вращения точки вокруг точки вместе с фигурой (в данном случае, по ходу часовой стрелки). Направление же мгновенной угловой скорости плоской фигуры будет совпадать с направлением ее вращения.
Из рассматриваемого вытекает:
Порядок решения задач на тему: План скоростей
1. Изображают на чертеже в выбранном масштабе плоскую фигуру и вектор скорости той точки, скорость которой известна.
2. Определяют направление скорости второй точки плоской фигуры.
3. Записывают векторное уравнение распределения скоростей при плоском движении, принимая за полюс точку, скорость которой известна, а за искомую ту точку, направление скорости которой известно.
4. Решают записанное векторное уравнение графически путем построения в выбранном масштабе плана скоростей.
5. Определяют мгновенную угловую скорость вращения плоской фигуры.
6. Определяют скорость других точек плоской фигуры.
Примеры решения задач на тему: План скоростей
Задача №1
Найти угловую скорость  шатуна 2 и скорость точки ползуна 3 кривошипно-шатунного механизма (рис. 4.24), если :
шатуна 2 и скорость точки ползуна 3 кривошипно-шатунного механизма (рис. 4.24), если :


Решение.
1. Согласно исходным данным в произвольном масштабе строим схему механизма (рис.4.25, а).
2. Учитывая, что кривошип 1 вращается вокруг неподвижной точки с угловой скоростью  определяем скорость точки кривошипа 1 и шатуна 2:
определяем скорость точки кривошипа 1 и шатуна 2:

Направлена скорость перпендикулярно в сторону угловой скорости .
3. Следующей точкой шатуна, скорость которого можно определить, является точка , поскольку она, кроме шатуна, одновременно принадлежит и ползуну 3, что движется поступательно в горизонтальных направляющих. То есть направление этой скорости известно.
Для определения скорости точки запишем уравнение распределения скоростей при плоскопараллельном движении, принимая за полюс точку , скорость которой известна:

где  — относительная скорость точки в ее относительном вращательном движении вместе с шатуном 2 вокруг точки . Вектор направлен перпендикулярно ;
— относительная скорость точки в ее относительном вращательном движении вместе с шатуном 2 вокруг точки . Вектор направлен перпендикулярно ;
 — абсолютная скорость точки , которая движется прямолинейно вместе с ползуном 3 в горизонтальных направляющих.
— абсолютная скорость точки , которая движется прямолинейно вместе с ползуном 3 в горизонтальных направляющих.

4. Решим уравнение (1) графически (рис.4.25, б). Для этого с произвольной точки (полюса плана скоростей) отложим направленный отрезок  , который в определенном масштабе будет изображать вектор скорости . Через точку
, который в определенном масштабе будет изображать вектор скорости . Через точку  этого отрезка проведем линию
этого отрезка проведем линию  перпендикулярно
перпендикулярно  , вдоль которой от точки будет направлен вектор скорости , длина и направление которого неизвестны.
, вдоль которой от точки будет направлен вектор скорости , длина и направление которого неизвестны.
Вектор который будет на плане скоростей изображать абсолютную скорость точки , выходит из полюса параллельно  к пересечению с линией в точке .
к пересечению с линией в точке .
Определим направление отрезка  , который на плане скоростей изображает относительную скорость . Поскольку, согласно уравнению (1), вектор надо прибавить к вектору , который на плане скоростей изображается вектором , то вектор будет направлен от точки к точке .
, который на плане скоростей изображает относительную скорость . Поскольку, согласно уравнению (1), вектор надо прибавить к вектору , который на плане скоростей изображается вектором , то вектор будет направлен от точки к точке .
Полученный векторный треугольник  представляет собой план скоростей для кривошипно-шатунного механизма в положении, что рассматривается. Стороны этого треугольника в определенном масштабе изображают: — абсолютную скорость точки ; — относительную скорость точки в ее относительном вращательном движении вместе с шатуном
представляет собой план скоростей для кривошипно-шатунного механизма в положении, что рассматривается. Стороны этого треугольника в определенном масштабе изображают: — абсолютную скорость точки ; — относительную скорость точки в ее относительном вращательном движении вместе с шатуном  вокруг точки ;
вокруг точки ;  — абсолютную скорость точки .
— абсолютную скорость точки .
Перенесем из плана скоростей в точку на рис.4.25, а найденные направления скоростей и  .
.
Поскольку скорость на плане изображается вектором , а — вектором , то угол при вершине равен углу между этими двумя векторами скоростей. Если на рис.4.25, а перенести и в точку , то угол между ними будет составлять , то есть 
Аналогично,  равен углу между векторами и . Учитывая, что
равен углу между векторами и . Учитывая, что  , с рис.4.25, а получим:
, с рис.4.25, а получим:

Таким образом, и угол при вершине тоже будет равняться , а треугольник будет равносторонним, то есть:
 , или
, или 
5. Определяем мгновенную угловую скорость шатуна 2. Поскольку  , то:
, то:

где  , исходя из того, что треугольник (рис.4.25,а) равнобедренный.
, исходя из того, что треугольник (рис.4.25,а) равнобедренный.
Направление угловой скорости  определяется вектором . В данном случае направлена против хода часовой стрелки.
определяется вектором . В данном случае направлена против хода часовой стрелки.
Ответ: 
Задача №2
Найти угловые скорости шатуна 2 и коромысла 3 и абсолютные скорости точек и  рычажного механизма (рис.4.26), если:
рычажного механизма (рис.4.26), если: 


Угловая скорость кривошипа 1 — 

Решение.
1. В соответствии с исходными данными в произвольном масштабе строим схему механизма (рис.4.27, а).
2. Так как точка принадлежит кривошипу 1, который вращается вокруг шарнира с угловой скоростью , то:

Вектор скорости направлен перпендикулярно в сторону вращения кривошипа (рис.4.27, а).
2. Шатун 2 механизма движется плоскопараллельно. Скорость точки шатуна 2 равна скорости точки кривошипа 1. Второй точкой шатуна, направление скорости которой известно, есть точка . Точка , кроме шатуна, принадлежит и коромыслу 3, которое вращается вокруг центра . Таким образом, скорость точки направлена перпендикулярно радиусу вращения  .
.
3. Для определения скорости точки запишем формулу распределение скоростей:

где — абсолютная скорость точки , которая направлена перпендикулярно ;
— абсолютная скорость точки ;
— относительная скорость точки в ее относительном вращательном движении вместе с шатуном 2 вокруг полюса . Направлен вектор перпендикулярно .
4. Решаем записанное уравнение графически. Для этого из произвольной точки (полюса плана скоростей) (рис.4.27,б) проводим вектор параллельно , который в определенном масштабе будет изображать скорость точки .

Через конец вектора проводим линию перпендикулярно  , вдоль которой от точки будет направлен вектор относительной скорости . Длина и направление этого вектора неизвестны.
, вдоль которой от точки будет направлен вектор относительной скорости . Длина и направление этого вектора неизвестны.
Скорость точки направлена перпендикулярно  и, по правилу, должна проходить через полюс плана скоростей. Исходя из этого, через точку проводим линию перпендикулярную коромыслу 3 к пересечению в точке
и, по правилу, должна проходить через полюс плана скоростей. Исходя из этого, через точку проводим линию перпендикулярную коромыслу 3 к пересечению в точке  с линией .
с линией .
Полученный на рис. 4.27, б векторный треугольник  являет собой план скоростей механизма в данном положении. В этом треугольнике вектор изображает абсолютную скорость точки , вектор направлен от полюса к точке — абсолютную скорость точки , а вектор
являет собой план скоростей механизма в данном положении. В этом треугольнике вектор изображает абсолютную скорость точки , вектор направлен от полюса к точке — абсолютную скорость точки , а вектор  направлен от точки к точке — относительную скорость , поскольку, согласно уравнению (2), эта скорость прибавляется к .
направлен от точки к точке — относительную скорость , поскольку, согласно уравнению (2), эта скорость прибавляется к .
Перенесем направления скоростей и в точку на рис. 4.27, а.
Поскольку  , а
, а  , то угол при вершине равен углу при вершине
, то угол при вершине равен углу при вершине  треугольника
треугольника  на схеме механизма (рис. 4.28), который образован путем продолжения кривошипа и коромысла
на схеме механизма (рис. 4.28), который образован путем продолжения кривошипа и коромысла  к пересечению.
к пересечению.

Таким образом

Угол при вершине будет равняться углу  между продолжением прямой (рис.4.28) и прямой , поскольку сторона , а прямая
между продолжением прямой (рис.4.28) и прямой , поскольку сторона , а прямая  . Учитывая, что
. Учитывая, что  , то:
, то:

Тогда угол при вершине :

Для определения сторон  плана скоростей воспользуемся теоремой синусов:
плана скоростей воспользуемся теоремой синусов:

Из уравнения (1) получим:


Таким образом:

5. Определим мгновенные угловые скорости шатуна 2 и коромысла 3. Поскольку  , то:
, то:

Направление угловой скорости определяется направлением относительной скорости . С рис.4.27,а видно, что угловая скорость будет направлена против хода часовой стрелки.
Угловая скорость коромысла 3 равна:

где

Направление  определяет скорость . Направлена угловая скорость коромысла 3 (рис.4.27,а) по ходу часовой стрелки.
определяет скорость . Направлена угловая скорость коромысла 3 (рис.4.27,а) по ходу часовой стрелки.
6. Определить величины скоростей и можно непосредственно и путем измерения соответствующих отрезков на построенном плане скоростей.
Поскольку вектор на плане скоростей изображается отрезком  , то масштабный коэффициент плана скоростей будет равен:
, то масштабный коэффициент плана скоростей будет равен:

Скорости на плане скоростей соответствует отрезок  , а скорости –
, а скорости –  .
.
Тогда:

7. Для определения скорости точки  воспользуемся теоремой подобия.
воспользуемся теоремой подобия.
Поскольку фигура  на схеме механизма и фигура
на схеме механизма и фигура  на плане скоростей должны быть подобными, то можно составить пропорцию:
на плане скоростей должны быть подобными, то можно составить пропорцию:

В левой части пропорции (2) отношение отрезков на схеме механизма, а в правой — на плане скоростей.
Из уравнения (2) получим расстояние от точки к точке  на плане скоростей:
на плане скоростей:

Поскольку на схеме механизма отрезок  перпендикулярен , то и на плане скоростей отрезок
перпендикулярен , то и на плане скоростей отрезок  надо провести перпендикулярно
надо провести перпендикулярно  , причем в ту сторону, чтобы обход точек , и
, причем в ту сторону, чтобы обход точек , и  на плане скоростей должен был быть против хода часовой стрелки, как и для точек , и
на плане скоростей должен был быть против хода часовой стрелки, как и для точек , и  на схеме механизма.
на схеме механизма.
Вектор скорости  точки на плане скоростей в масштабе будет изображаться вектором
точки на плане скоростей в масштабе будет изображаться вектором  , а величина скорости точки равна:
, а величина скорости точки равна:

Ответ: 



Задача №3
В состав рычажного механизма (рис.4.29) входят два кривошипа 1 и 4, и два шатуна 2 и 3. Кривошип 1 вращается с угловой скоростью  , а кривошип 4 с угловой скоростью
, а кривошип 4 с угловой скоростью  .
.

Найти угловые скорости шатунов 2 и 3 и абсолютные скорости точек и  , если:
, если: 
 В данном положении механизма кривошип 1 расположен вертикально, а кривошип 2 – горизонтально.
В данном положении механизма кривошип 1 расположен вертикально, а кривошип 2 – горизонтально.
Решение. Особенность этой задачи заключается в том, что определить сразу направление скорости точки невозможно. Но точка одновременно принадлежит к двум телам (шатуну и шатуну  ), и для нее можно записать два векторных уравнения распределения скоростей при плоском движении (относительно точек и ), что позволяет решить задачу.
), и для нее можно записать два векторных уравнения распределения скоростей при плоском движении (относительно точек и ), что позволяет решить задачу.
1. В соответствии с исходными данными в произвольном масштабе строим схему механизма (рис.4.30, а).
2. Так как точка принадлежит кривошипу 1, который вращается вокруг шарнира с угловой скоростью , то:

Вектор скорости направлен перпендикулярно в сторону вращения кривошипа 1 (рис.4.30, а).
Шатун 2 механизма движется плоскопараллельно. Скорость точки шатуна 2 равна скорости точки кривошипа 1.
Для определения скорости точки шатуна 2 запишем формулу распределения скоростей при плоском движении:

где — абсолютная скорость точки , величина и направление которой является неизвестным;
— абсолютная скорость точки ;
— относительная скорость точки при ее вращении вместе с шатуном 2 вокруг полюса . Направлен вектор перпендикулярно .
В уравнении (1) три неизвестных: величина и направление скорости точки ; величина скорости . Поскольку векторное уравнение

для плоскости позволяет определить только две неизвестных, то решить уравнение (1) невозможно.
3. Рассмотрим определение скорости точки шатуна 3 относительно точки .
Скорость точки кривошипа 4 равна:

Вектор скорости  направлен перпендикулярно
направлен перпендикулярно  в сторону вращения кривошипа 4 (рис.4.30, а).
в сторону вращения кривошипа 4 (рис.4.30, а).
Учитывая, что шатун 3 механизма движется плоскопараллельно, то для определения скорости точки шатуна 3 запишем формулу распределения скоростей при плоском движении:

где — абсолютная скорость точки ;
 — относительная скорость точки в ее относительном вращательном движении вместе с шатуном 3 вокруг полюса . Направлен вектор перпендикулярно
— относительная скорость точки в ее относительном вращательном движении вместе с шатуном 3 вокруг полюса . Направлен вектор перпендикулярно  .
.
В записанной системе векторных уравнений (1,2) четыре неизвестных: величина и направление скорости точки ; величина скорости ; величина скорости . Поскольку из каждого уравнения можно определить две неизвестных, то записанная система является определенной и ее можно решить.
4. Решаем записанную систему векторных уравнений (1) и (2) графически. Для этого из произвольной точки построим сначала уравнение (1), а затем (2) (рис.4.30, б).
Согласно уравнению (1) из произвольной точки проводим вектор параллельно , который будет изображать скорость точки . Длину отрезка  выберем
выберем  .
.
Тогда масштабный коэффициент плана скоростей будет равен:

Через конец вектора проводим линию  перпендикулярно , вдоль которой от точки будет направлен вектор относительной скорости . Длина и направление этого вектора неизвестны.
перпендикулярно , вдоль которой от точки будет направлен вектор относительной скорости . Длина и направление этого вектора неизвестны.
Теперь построим из того же самого полюса уравнение (2). Сначала отложим вектор  параллельно
параллельно  , который в масштабе
, который в масштабе  будет изображать скорость точки . Длина этого вектора соответственно равна:
будет изображать скорость точки . Длина этого вектора соответственно равна:

Через конец вектора  проводим линию
проводим линию  перпендикулярно
перпендикулярно  , вдоль которой от точки будет направлен вектор относительной скорости
, вдоль которой от точки будет направлен вектор относительной скорости  .
.
Точка пересечения прямых  и , которая одновременно удовлетворяет векторным уравнением (1) и (2), и будет решением системы, а вектор который на плане скоростей изображает будет направлен от полюса к точке .
и , которая одновременно удовлетворяет векторным уравнением (1) и (2), и будет решением системы, а вектор который на плане скоростей изображает будет направлен от полюса к точке .
Полученный на рис. 4.30,б четырехугольник  представляет собой план скоростей механизма в данном положении. В этом четырехугольнике: вектор
представляет собой план скоростей механизма в данном положении. В этом четырехугольнике: вектор  определяет относительную скорость ; вектор
определяет относительную скорость ; вектор  — относительную скорость ; — абсолютную скорость точки .
— относительную скорость ; — абсолютную скорость точки .
Перенесем направления скоростей и на рис. 4.30,а и, померив длины соответствующих отрезков, определим величины этих скоростей:

5. Определим мгновенные угловые скорости шатунов.
Поскольку  , то:
, то:

Направление угловой скорости определяется направлением относительной скорости . С рис.4.30, а видно, что будет направлена против хода часовой стрелки.
Аналогично, угловая скорость шатуна 3 равна:

Направление  определяется относительной скоростью . Направлена угловая скорость шатуна 3 по ходу часовой стрелки.
определяется относительной скоростью . Направлена угловая скорость шатуна 3 по ходу часовой стрелки.
Для определения скорости точки  воспользуемся теоремой подобия. Поскольку точка на схеме механизма лежит посередине шатуна , то и на плане скоростей она должна лежать посередине отрезка
воспользуемся теоремой подобия. Поскольку точка на схеме механизма лежит посередине шатуна , то и на плане скоростей она должна лежать посередине отрезка  .
.
Вектор скорости  точки на плане скоростей в масштабе будет изображаться вектором
точки на плане скоростей в масштабе будет изображаться вектором  , а величина скорости точки равна:
, а величина скорости точки равна:

Ответ: 

План ускорений
План ускорений – построенный в определенном масштабе векторный график, характеризующие ускорения всех точек и звеньев механизма. Произвольная точка ра, из которой производится построение плана ускорений, называется полюсом плана ускорений.
Рассмотрим графический способ определения ускорений точек плоской фигуры (тела) с помощью плана ускорений.
Планом ускорений плоской фигуры является геометрическое место концов векторов ускорений любых точек фигуры, что отложены из одной произвольной точки, которую называют полюсом плана ускорений.
Построение плана ускорений основано на представлении ускорения  любой точки фигуры в виде суммы трех векторов:
любой точки фигуры в виде суммы трех векторов:

где  — ускорение точки фигуры, которую принято за полюс поступательного движения;
— ускорение точки фигуры, которую принято за полюс поступательного движения;
 — относительное нормальное (центростремительное) ускорение точки в ее относительном вращательном движении вместе с телом вокруг полюса . Направлено это ускорение от точки к точке и по модулю равно
— относительное нормальное (центростремительное) ускорение точки в ее относительном вращательном движении вместе с телом вокруг полюса . Направлено это ускорение от точки к точке и по модулю равно 
 — относительное тангенциальное (касательное) ускорение точки в ее относительном вращательном движении вместе с телом вокруг полюса . Направлено это ускорение перпендикулярно (отрезка ) в сторону углового ускорения тела и по модулю равно
— относительное тангенциальное (касательное) ускорение точки в ее относительном вращательном движении вместе с телом вокруг полюса . Направлено это ускорение перпендикулярно (отрезка ) в сторону углового ускорения тела и по модулю равно 
Поскольку для определения величины надо знать угловую скорость плоской фигуры, то, если она не задана, предварительно надо построить план скоростей. Из плана скоростей определить относительную скорость вращения одной точки фигуры относительно второй и найти угловую скорость относительного вращательного движения (занятие 7).
Для того, чтобы уравнение (4.18) можно было решить, должно быть известно ускорение  любой точки фигуры, которую выбирают за полюс поступательного движения.
любой точки фигуры, которую выбирают за полюс поступательного движения.
Кроме того, должно быть известно:
Рассмотрим определение ускорений точек и треугольника (рис.4.31, а). Известными являются ускорение точки , направление ускорения точки и угловая скорость треугольника , то есть случай 1.
Для ускорения точки , если за полюс выбрать точку , будет справедливым векторное уравнение (4.18).
Решим уравнение (4.18) графически. Для этого (рис.4.31, б) из произвольной точки  (полюса плана ускорений) построим вектор
(полюса плана ускорений) построим вектор  , который в масштабе будет изображать ускорение . С конца построенного вектора (точки
, который в масштабе будет изображать ускорение . С конца построенного вектора (точки  ) построим вектор
) построим вектор  , который в том же масштабе будет изображать ускорение
, который в том же масштабе будет изображать ускорение  .
.
Величину ускорения определим из формулы:

а направлен этот вектор вдоль от точки к точке .

К нормальному ускорению добавим, согласно уравнению (4.18), тангенциальное ускорение  . Поскольку величина этого ускорения неизвестна, то через точку
. Поскольку величина этого ускорения неизвестна, то через точку  (конец вектора
(конец вектора  ) проведем линию
) проведем линию  перпендикулярно , вдоль которой и будет направлен вектор .
перпендикулярно , вдоль которой и будет направлен вектор .
Направление абсолютного ускорения  точки известно из условия задачи. Поскольку все абсолютные ускорения точек на плане откладываются от полюса , то через полюс проведем прямую, параллельную направлению ускорения точки . Точка пересечения линий и
точки известно из условия задачи. Поскольку все абсолютные ускорения точек на плане откладываются от полюса , то через полюс проведем прямую, параллельную направлению ускорения точки . Точка пересечения линий и  будет решением уравнения (4.18), а вектор
будет решением уравнения (4.18), а вектор  будет в выбранном масштабе изображать ускорение точки .
будет в выбранном масштабе изображать ускорение точки .
Для определения ускорения точки воспользуемся тем, что известными уже являются ускорения двух точек фигуры и (случай 2).
Запишем векторные уравнения для ускорения точки относительно полюсов и :

где  и
и  — относительные нормальные ускорения точки в ее относительном вращательном движении соответственно вокруг точек и ;
— относительные нормальные ускорения точки в ее относительном вращательном движении соответственно вокруг точек и ;
 и
и  — относительные тангенциальные ускорения точки в ее относительном вращательном движении вокруг точек и , соответственно.
— относительные тангенциальные ускорения точки в ее относительном вращательном движении вокруг точек и , соответственно.
Первым решаем уравнение (4.19). Поскольку ускорение точки на плане (рис.4.31, б) уже построено, то с его конца (точки ) строим вектор  , который направлен от точки к точке и по модулю в масштабе равен
, который направлен от точки к точке и по модулю в масштабе равен  :
:

Через конец вектора  проводим прямую, перпендикулярную
проводим прямую, перпендикулярную  , вдоль которой будет направлено ускорение
, вдоль которой будет направлено ускорение  и на которой будет лежать точка конца вектора
и на которой будет лежать точка конца вектора  .
.
Следующим построим уравнение (4.20). Поскольку ускорение точки на плане уже построено, то с его конца, точки , строим вектор  , который направлен от к и по модулю в масштабе равен :
, который направлен от к и по модулю в масштабе равен :

Через конец вектора проводим прямую, перпендикулярную , вдоль которой будет направлено ускорение  и на которой будет лежать точка конца вектора .
и на которой будет лежать точка конца вектора .
Таким образом, конец вектора будет лежать на пересечении линий, вдоль которых будут направлены тангенциальные ускорения и . Вектор  на плане ускорений будет в масштабе изображать абсолютное ускорение точки .
на плане ускорений будет в масштабе изображать абсолютное ускорение точки .
Векторы ,  и , выходящие из полюса плана ускорений, определяют абсолютные ускорения точек , и . Отрезки же, соединяющие концы векторов абсолютных ускорений
и , выходящие из полюса плана ускорений, определяют абсолютные ускорения точек , и . Отрезки же, соединяющие концы векторов абсолютных ускорений  и
и  определяют относительные ускорения одних точек при их вращении вокруг других
определяют относительные ускорения одних точек при их вращении вокруг других 
Кроме абсолютных и относительных ускорений точек фигуры , определяется величина ее углового ускорения :
 или
или  или
или 
Для определения же направления углового ускорения надо перенести в точку вектор тангенциального ускорения и направление этого вектора укажет направление углового ускорения. В данном случае, угловое ускорение направлено по ходу часовой стрелки.
Треугольник  , который образовался на плане ускорений будет подобно треугольнику .
, который образовался на плане ускорений будет подобно треугольнику .
Таким образом, для плана ускорений справедливо
правило подобия: фигура, которую образуют концы векторов абсолютных ускорений точек тела на плане ускорений подобная фигуре, которую одноименные точки образуют на теле.
Примеры решения задач на тему: План ускорений
Задача №1
Найти ускорение точки ползуна 3 и угловое ускорение  шатуна 2 механизма, изображенном на рис.4.24. Выходные данные:
шатуна 2 механизма, изображенном на рис.4.24. Выходные данные: 
 , кривошип 1 вращается равномерно
, кривошип 1 вращается равномерно 
Решение. План скоростей для этого механизма был построен в задаче № 1 занятия № 7 (рис.4.25,б) и была определена угловая скорость шатуна 2 
1.Построим схему механизма (рис. 4.32, а).
2. Сначала найдем ускорение точки механизме, поскольку она принадлежит кривошипу 1, который вращается вокруг точки с известной угловой скоростью.
Учитывая, что угловая скорость кривошипа постоянная  то
то  и полное ускорение будет равняться нормальному ускорению
и полное ускорение будет равняться нормальному ускорению  точки в ее вращательном движении вокруг :
точки в ее вращательном движении вокруг :

По модулю:

Направлено ускорение от точки к точке по линии .
3. Для определения ускорения точки запишем формулу распределения ускорений при плоском движении, приняв за полюс точку , ускорение которой уже известно:

где — абсолютное ускорение точки , которое направлено по направлению движения ползуна 3 в горизонтальных направляющих;
— ускорение точки , известное по величине и по направлению;
— относительное нормальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено по шатуну от точки к точке и по модулю равно:

— тангенциальное ускорение точки при ее вращении вокруг точки , направлено перпендикулярно шатуну и по модулю равно:

Поскольку направление ускорения точки известно, то уравнение (1) достаточно для определения .
4. Решим уравнение (1) графически путем построения плана ускорений.
Из произвольной точки полюса плана ускорений (рис.4.32,б) отложим вектор , который будет изображать ускорение , и который направлен параллельно линии от точки к точке . От конца этого вектора отложим вектор  , что будет изображать , и который направлен параллельно от точки к точке . Через конец вектора , точку
, что будет изображать , и который направлен параллельно от точки к точке . Через конец вектора , точку  , проведем линию
, проведем линию  , перпендикулярную , вдоль которой будет направлено тангенциальное ускорение и на этой линии будет лежать точка — конец вектора абсолютного ускорения точки механизма.
, перпендикулярную , вдоль которой будет направлено тангенциальное ускорение и на этой линии будет лежать точка — конец вектора абсолютного ускорения точки механизма.

Поскольку ускорение направлено по оси  движения ползуна 3, то с полюса проводим горизонтальную прямую. Точка пересечения этой прямой с линией
движения ползуна 3, то с полюса проводим горизонтальную прямую. Точка пересечения этой прямой с линией  , проведенная перпендикулярно , будет концом вектора ускорения точки , а вектор
, проведенная перпендикулярно , будет концом вектора ускорения точки , а вектор  будет изображать на плане ускорений .
будет изображать на плане ускорений .
4. Из построенного плана ускорений определим абсолютные величины ускорений и . Для этого с полюса опустим перпендикуляр  на продолжение линии
на продолжение линии  . Угол
. Угол  равен углу
равен углу  и составляет
и составляет  .
.
Из векторного четырехугольника  (рис. 4.32, б) вытекает:
(рис. 4.32, б) вытекает:

Спроектируем векторное уравнение (2) на прямую  :
:

Учитывая, что  изображает на плане ускорений ,
изображает на плане ускорений ,  , уравнение (3) можно переписать следующим образом:
, уравнение (3) можно переписать следующим образом:

Откуда:

Теперь спроектируем уравнение (2) на прямую  :
:

Учитывая, что на плане ускорений изображает , получим:

Откуда:

Поскольку  , то:
, то:

Из полученного результата следует, что в данный момент времени шатун механизма вращается равномерно  и план ускорений будет иметь вид как на рис.4.33.
и план ускорений будет иметь вид как на рис.4.33.

Ответ: 
Если построение плана ускорений выполнять с соблюдением масштаба, то ускорения характерных точек можно определить непосредственно измерением соответствующих отрезков на плане ускорений.
Задача №2
Найти абсолютное ускорение точек и на угловые ускорения шатуна 2 и коромысла 3 шарнирного механизма, схема которого изображена на рис.4.26, если: 

 . Кривошип 1 механизма вращается с постоянной угловой скоростью
. Кривошип 1 механизма вращается с постоянной угловой скоростью 
Решение. План скоростей механизма для положения, что рассматривается, был построен в задаче № 2 занятие № 7 (рис.4.27, б) и определены мгновенные угловые скорости шатуна 2 и коромысла 3: 
Решим задачу путем построения в масштабе плана ускорений.
1. Сначала в произвольном масштабе строим схему механизма (рис.4.34, а).
2.Определим ускорение точки кривошипа.
Поскольку кривошип 1 вращается вокруг неподвижной точки с постоянной угловой скоростью (то есть  и соответственно
и соответственно  ), то ускорение точки :
), то ускорение точки :

По модулю равно:

Направлено ускорение от точки к точке .
3.Запишем векторные уравнения для определения ускорения точки .
Точка принадлежит одновременно шатуну 2 и коромыслу 3 (случай 3). У шатуна 2 известно уже определенное ускорение точки , а в коромысла 3 ускорение точки (точка неподвижная, то есть  ). Таким образом, можно записать формулы распределения ускорений для точки , взяв за полюс точку для шатуна 2 в первом уравнении и точку для коромысла 3 во втором уравнении:
). Таким образом, можно записать формулы распределения ускорений для точки , взяв за полюс точку для шатуна 2 в первом уравнении и точку для коромысла 3 во втором уравнении:

где — относительное нормальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено вдоль от точки к точке и по модулю равно:

— относительное тангенциальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено перпендикулярно и по модулю равно:

 — относительное нормальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено вдоль
— относительное нормальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено вдоль  от точки к точке и по модулю равно:
от точки к точке и по модулю равно:

 — относительное тангенциальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено перпендикулярно и по модулю равно:
— относительное тангенциальное ускорение точки в ее относительном вращательном движении вокруг точки , направлено перпендикулярно и по модулю равно:

4.Решим графически систему векторных уравнений (1,2).
Сначала построим уравнение (1). Для этого из произвольной точки полюса плана ускорений (рис.4.34,б) отложим вектор , который будет изображать ускорение . Направлен вектор параллельно линии от точки к точке . Длину этого вектора выберем  . Тогда масштабный коэффициент плана ускорений будет равняться:
. Тогда масштабный коэффициент плана ускорений будет равняться:

От конца вектора отложим вектор , который будет изображать . Направлен вектор параллельно от точки к точке , а длина этого вектора равна:

Через конец вектора проведем линию перпендикулярную , вдоль которой будет направлено тангенциальное ускорение и на этой линии будет лежать точка — конец вектора абсолютного ускорения точки механизма.
Следующим построим уравнение (2).
Поскольку  , то точка
, то точка  будет лежать в полюсе плана ускорений.
будет лежать в полюсе плана ускорений.
От точки  отложим вектор
отложим вектор  , который будет изображать
, который будет изображать  . Направлен вектор параллельно от точки к точке , а длина этого вектора соответственно равна:
. Направлен вектор параллельно от точки к точке , а длина этого вектора соответственно равна:



Через конец вектора  проведем линию перпендикулярную , вдоль которой будет направлено тангенциальное ускорение
проведем линию перпендикулярную , вдоль которой будет направлено тангенциальное ускорение  .
.
Решением системы (1,2) будет точка , в которой пересекаются линии, проведенные перпендикулярно и , вдоль которых направлены соответственно тангенциальные ускорения и .
Вектор абсолютного ускорения точки на плане ускорений в масштабе будет изображаться вектором  , а величина ускорения точки равна:
, а величина ускорения точки равна:

Величины тангенциальных ускорений и найдем путем измерения соответствующих отрезков на плане ускорений:

Поскольку  и
и  , то мгновенные угловые ускорения
, то мгновенные угловые ускорения  шатуна 2 и
шатуна 2 и  коромысла 3 соответственно равны:
коромысла 3 соответственно равны:

где  — длина коромысла 3, которая была определена в задаче №2 занятия №7.
— длина коромысла 3, которая была определена в задаче №2 занятия №7.
Для определения направления углового ускорения перенесем мысленно в точку относительное тангенциальное ускорение  . Направление указывает на то, что будет направлено по ходу часовой стрелки.
. Направление указывает на то, что будет направлено по ходу часовой стрелки.
Аналогично, для определения направления в точку перенесем  . Угловое ускорение будет направлено против хода часовой стрелки.
. Угловое ускорение будет направлено против хода часовой стрелки.
5.Для определения ускорения точки воспользуемся теоремой подобия. Для этого сначала построим прямую  на плане ускорений (рис.4.34, б). Поскольку фигура
на плане ускорений (рис.4.34, б). Поскольку фигура  на схеме механизма и фигура
на схеме механизма и фигура  на плане ускорений должны быть подобными, то можно составить пропорцию:
на плане ускорений должны быть подобными, то можно составить пропорцию:

В левой части пропорции (3) отношение отрезков на схеме механизма, а в правой — на плане ускорений.
Из уравнения (3) получим расстояние от точки к точке на плане ускорений:

Поскольку на схеме механизма отрезок  перпендикулярен , то и на плане ускорений отрезок
перпендикулярен , то и на плане ускорений отрезок  надо провести перпендикулярно
надо провести перпендикулярно  , причем в ту сторону, чтобы расположение точек , и на плане ускорений было против хода часовой стрелки, как и точки , и
, причем в ту сторону, чтобы расположение точек , и на плане ускорений было против хода часовой стрелки, как и точки , и  на схеме механизма.
на схеме механизма.
Вектор абсолютного ускорения  точки
точки  на плане ускорений в масштабе будет изображаться вектором
на плане ускорений в масштабе будет изображаться вектором  , а величина ускорения точки равна:
, а величина ускорения точки равна:

Ответ: 

Задача №3
В состав рычажного механизма (рис.4.35) входят два кривошипа 1 и 4, и два шатуна 2 и 3. Кривошип 1 в настоящий момент времени вращается равномерно с угловой скоростью  , а кривошип 4 – замедленно с угловой скоростью
, а кривошип 4 – замедленно с угловой скоростью  и угловым ускорением
и угловым ускорением 
Найти угловые ускорения шатунов 2 и 3 и абсолютные ускорения точек и , если: 
 . В данном положении механизма кривошип 1 расположен вертикально, а кривошип 4 — горизонтально.
. В данном положении механизма кривошип 1 расположен вертикально, а кривошип 4 — горизонтально.
Решение. План скоростей механизма для положения, что рассматривается, был построен в задаче №3 занятия №7 (рис.4.30, б) и определены мгновенные угловые скорости шатуна 2 и шатуна 3: 
1. В произвольном масштабе построим схему механизма (рис. 4.36, а).
2.Сначала определим абсолютные ускорения точек и , принадлежащие соответственно кривошипам 1 и 4, угловые скорости которых известны.
Поскольку кривошип 1 вращается вокруг неподвижной точки с постоянной угловой скоростью  то есть
то есть  , то:
, то:

Направлено ускорение вдоль кривошипа от точки к точке .
Кривошип 4 вращается вокруг неподвижной точки с угловой скоростью  и угловым ускорением
и угловым ускорением  . Поскольку кривошип 4 вращается замедленно, то угловое ускорение направлено противоположно угловой скорости (рис.4.35.)
. Поскольку кривошип 4 вращается замедленно, то угловое ускорение направлено противоположно угловой скорости (рис.4.35.)
Абсолютное ускорение точки кривошипа 4 представляет собой векторную сумму нормальной и тангенциальной составляющих:

Нормальная составляющая ускорения точки направлена вдоль  от точки к точке и по модулю равна:
от точки к точке и по модулю равна:

а тангенциальная — перпендикулярно в сторону углового ускорения  и по модулю равна:
и по модулю равна:

3. Запишем векторные уравнения для определения ускорения точки .
Точка принадлежит одновременно шатуну 2 и шатуну 3. У шатуна 2 известно ускорение точки , а у шатуна 3 — точки . Таким образом, можно записать формулы распределения ускорений для точки , взяв за полюс точку для шатуна 2 в первом уравнении и точку шатуна 3 во втором:

В уравнении (2):
— направлено вдоль от точки к точке и по модулю равно:

— направлено перпендикулярно , величина и направление этого ускорения неизвестны.
В уравнении (3):
 — направлено вдоль
— направлено вдоль  от точки к точке и по модулю равно:
от точки к точке и по модулю равно:

 — направлено перпендикулярно , величина и направление этого ускорения неизвестны.
— направлено перпендикулярно , величина и направление этого ускорения неизвестны.
4. Решим графически систему векторных уравнений (2,3).
Сначала построим уравнение (2). Для этого из произвольной точки полюса плана ускорений (рис.4.36,б) отложим вектор , который будет изображать ускорение . Направлен вектор параллельно линии от точки к точке . Длину этого вектора выберем  . Тогда масштабный коэффициент плана ускорений будет равняться:
. Тогда масштабный коэффициент плана ускорений будет равняться:

От конца вектора отложим вектор , который будет изображать . Направлен вектор параллельно от точки к точке , а длина этого вектора равна:

Через конец вектора проведем линию перпендикулярную , вдоль которой будет направлено тангенциальное ускорение и на этой линии будет лежать точка — конец вектора абсолютного ускорения точки механизма.
Следующим построим уравнение (3).
Для построения вектора  от полюса согласно уравнению (1) отложим вектор
от полюса согласно уравнению (1) отложим вектор  , а с его конца
, а с его конца  . Эти векторы в масштабе
. Эти векторы в масштабе  будут изображать ускорения
будут изображать ускорения  и
и  и будут направлены им параллельно (рис. 4.36, а).
и будут направлены им параллельно (рис. 4.36, а).
Длины векторов и соответственно равны:

Абсолютное ускорение точки на плане ускорений будет изображаться вектором  .
.

От точки отложим вектор  , который будет изображать
, который будет изображать . Направлен вектор параллельно от точки к точке , а длина этого вектора равна:
. Направлен вектор параллельно от точки к точке , а длина этого вектора равна:

Через конец вектора проведем линию перпендикулярную , вдоль которой будет направлено тангенциальное ускорение  .
.
Решением системы (2,3) будет точка , в которой пересекаются линии, проведенные перпендикулярно и , вдоль которых направлены соответственно тангенциальные ускорения и .
Вектор абсолютного ускорения точки на плане ускорений в масштабе будет изображаться вектором  , а величина ускорения точки равна:
, а величина ускорения точки равна:

Величины тангенциальных ускорений и найдем путем измерения соответствующих отрезков на плане ускорений:

Поскольку  и
и  , то мгновенные угловые ускорение шатуна 2 и шатуна 3 соответственно равны:
, то мгновенные угловые ускорение шатуна 2 и шатуна 3 соответственно равны:

Направления угловых ускорений и определяем путем перенесения мысленно в точку относительных тангенциальных ускорений и (аналогично задаче №2). Угловое ускорение направлено по ходу часовой стрелки, а — против хода часовой стрелки.
5. Для определения ускорения точки воспользуемся теоремой подобия. Поскольку точка на схеме механизма лежит посередине шатуна , то и на плане ускорений она должна лежать посередине отрезка  . Вектор ускорения
. Вектор ускорения  точки плане ускорений в масштабе будет изображаться вектором
точки плане ускорений в масштабе будет изображаться вектором  , а величина абсолютного ускорения точки равна:
, а величина абсолютного ускорения точки равна:

Ответ: 

Услуги по теоретической механике:
- Заказать теоретическую механику
- Помощь по теоретической механике
- Заказать контрольную работу по теоретической механике
Учебные лекции:
- Статика
- Система сходящихся сил
- Момент силы
- Пара сил
- Произвольная система сил
- Плоская произвольная система сил
- Трение
- Расчет ферм
- Расчет усилий в стержнях фермы
- Пространственная система сил
- Произвольная пространственная система сил
- Плоская система сходящихся сил
- Пространственная система сходящихся сил
- Равновесие тела под действием пространственной системы сил
- Естественный способ задания движения точки
- Центр параллельных сил
- Параллельные силы
- Система произвольно расположенных сил
- Сосредоточенные силы и распределенные нагрузки
- Кинематика
- Кинематика твердого тела
- Движения твердого тела
- Динамика материальной точки
- Динамика механической системы
- Динамика плоского движения твердого тела
- Динамика относительного движения материальной точки
- Динамика твердого тела
- Кинематика простейших движений твердого тела
- Общее уравнение динамики
- Работа и мощность силы
- Обратная задача динамики
- Поступательное и вращательное движение твердого тела
- Плоскопараллельное (плоское) движение твёрдого тела
- Сферическое движение твёрдого тела
- Движение свободного твердого тела
- Сложное движение твердого тела
- Сложное движение точки
- Статика твердого тела
- Равновесие составной конструкции
- Равновесие с учетом сил трения
- Центр масс
- Колебания материальной точки
- Относительное движение материальной точки
- Статические инварианты
- Дифференциальные уравнения движения точки под действием центральной силы и их анализ
- Динамика системы материальных точек
- Общие теоремы динамики
- Теорема об изменении кинетической энергии
- Теорема о конечном перемещении плоской фигуры
- Потенциальное силовое поле
- Метод кинетостатики
- Вращения твердого тела вокруг неподвижной точки