Под относительностью понимают зависимость чего-либо от выбора системы отсчета. Так, покой и движение тела, его положение в пространстве всегда относительны. Человек, сидящий внутри движущегося автомобиля, покоится относительно этого автомобиля. Но относительно предметов снаружи он движется с некоторой скоростью.
Относительность перемещения
Пусть движение материальной точки (МТ) описывается относительно двух систем отсчета: подвижной (ПСО) и неподвижной (НСО). Зная, как эта точка движется относительно ПСО, и, как ПСО движется относительно НСО, можно вычислить перемещение точки относительно НСО. В этом заключается правило сложения перемещений:
s′ = s1 + s2
s′ — перемещение МТ относительно НСО, s1— перемещение МТ относительно ПСО, s2 — перемещение ПСО относительно НСО.
Чтобы применять правило сложения перемещений, нужно уметь складывать вектора.
Полезные факты
- Если тело движется в направлении движения ПСО, то модуль его перемещения относительно НСО равен сумме модулей перемещения этого тела относительно ПСО и перемещения ПСО относительно НСО:
s′ = s1 + s2
- Если тело движется противоположно движению ПСО, то модуль его перемещения относительно НСО равен разности модулей перемещения этого тела относительно ПСО и перемещения ПСО относительно НСО:
s′ = s1 – s2
- Если тело движется под прямым углом по отношению к направлению движения ПСО, то модуль его перемещения относительно НСО равен корню из суммы квадратов перемещений этого тела относительно ПСО и перемещения ПСО относительно НСО:
s′ = √(s12 + s22)
- Если относительно ПСО тело покоится, то его перемещение относительно НСО равно перемещению ПСО относительно НСО: при s1=0, перемещение s′ = s2
- Если тело движется относительно двух НСО, то его перемещение относительно НСО1 равно перемещению движения относительно НСО2. В этом случае одну из систем можно принять за ПСО с нулевой скоростью. Тогда ее перемещение относительно НСО будет равно 0. При s2=0, перемещение s′ = s1
Пример №1. Человек прошел в автобусе 2 метра в направлении заднего выхода. За это же время автобус успел переместиться относительно остановки на 10 м. Найти перемещение человека относительно автобусной остановки.
Так как человек двигался в сторону конца автобуса, он двигался противоположно его движению. В этом случае его перемещение будет равно модулю разности перемещений, совершенных человеком относительно автобуса и автобусом относительно остановки:
s′=|s1 – s2|=|10 – 2|=8 (м).
Относительность скорости в ПСО и НСО
Тела и системы отсчета могут двигаться с различной скоростью. Но, зная скорость движения МТ относительно ПСО и скорость движения ПСО относительно НСО, можно вычислить скорость движения МТ относительно НСО. В этом заключается правило сложения скоростей:
v′ = v + u
v′ — скорость МТ относительно НСО, v — скорость МТ относительно ПСО, u — скорость движения ПСО относительно НСО.
Складывая векторы скоростей, нужно пользоваться правилами сложения векторов.
Полезные факты
- Если тело движется в направлении движения ПСО, то модуль его скорости относительно НСО равен сумме модулей скорости этого тела относительно ПСО и скорости ПСО относительно НСО:
v′ = v + u
- Если тело движется противоположно движению ПСО, то модуль его скорости относительно НСО равен разности модуля скорости этого тела относительно ПСО и скорости ПСО относительно НСО:
v′ = v – u
- Если тело движется под прямым углом по отношению к направлению движения ПСО, то модуль его скорости относительно НСО равен корню из суммы квадратов скорости этого тела относительно ПСО и скорости ПСО относительно НСО:
v′ = √(v2 + u2)
- Если относительно ПСО тело покоится, то его скорость относительно НСО равна скорости ПСО относительно НСО: при v=0, скорость v′ = u
- Если тело движется относительно двух НСО, то его скорость относительно НСО1 равна скорости движения относительно НСО2. В этом случае одну из неподвижных систем можно принять за ПСО с нулевой скоростью. При u=0, скорость v′ = u
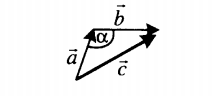
Пример №2. Моторная лодка должна пересечь реку, скорость течения которой равна 5 км/ч, по кратчайшему пути. Собственная скорость лодки равна 10 км/ч. Определить, под каким углом к берегу должна быть направлена лодка, чтобы она не отклонялась от кратчайшего пути.
Кратчайшим путем между двумя параллельными линиями является отрезок, заключенный между этими линиями при условии, что он лежит на прямой, пересекающей эти линии под прямым углом. На рисунке этот путь отметим отрезком АВ.
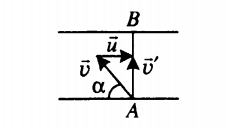
Лодка движется прямолинейно. Поэтому направление ее скорости относительно берега совпадает с направлением перемещения:
![]()
Векторы скоростей образуют прямоугольный треугольник, и собственная скорость лодки направлена к берегу под некоторым углом α. Косинус этого угла равен отношению прилегающего катета (скорости лодки относительно реки) к гипотенузе (скорости течения реки):
![]()
Косинусу 0,5 соответствует угол, равный 60 градусам.
Относительная скорость двух тел
Понятие относительной скорости вводится, когда рассматривается движение двух тел относительно друг друга внутри одной и той же системы отсчета (СО). Примером служат два движущихся автомобиля, в то время как их движение рассматривается относительно неподвижного объекта.
Относительная скорость равна векторной разности скоростей первого и второго тела относительно СО:
vотн = v1– v2
vотн — относительная скорость, или скорость первого тела относительно второго, v1 и v2 — скорость первого и второго тела относительно СО.
Варианты обозначения относительной скорости и их проекций:
- v12 — скорость первого тела относительно второго. Ее проекция равна:
v12x = v1x – v2x
- v21 — скорость второго тела относительно первого. Ее проекция равна v21x = v2x – v1x
Для вычисления относительной скорости движения тела важно уметь применять правила вычитания векторов.
Полезные факты
- Если тела движутся в одном направлении, то относительная скорость равна модулю разности скоростей первого и второго тела:
vотн = |v1 – v2|
- Если тела движутся в противоположных направлениях, то относительная скорость равна сумме скоростей первого и второго тела:
vотн = |v1 + v2|
- Если тела движутся взаимно перпендикулярно, то относительная скорость равна корню из суммы квадратов скоростей первого и второго тела:
vотн = √(v12 + v22)
Пример №3. Два автомобиля движутся противоположно друг другу. Скорость первого автомобиля относительно дороги равна 100 км/ч. Скорость второго автомобиля относительно первого равна 180 км/ч. Найти модуль скорости второго автомобиля относительно дороги.
Так как автомобили движутся в противоположном направлении, относительная скорость равна сумме скоростей первого и второго автомобиля. Поэтому скорость второго равна разности относительной скорости и скорости движения второго тела, которым в данном случае является первый автомобиль:
![]()
Скорость второго автомобиля относительно дороги равна 80 км/час.
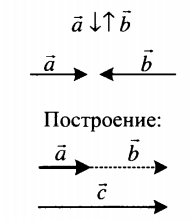
Правила сложения векторов
Эта таблица иллюстрирует правила сложения векторов на примере векторов a и b. Результатом их сложения является вектор c .
| Сложение двух сонаправленных векторов | |
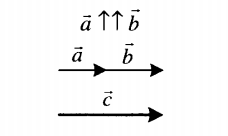 |
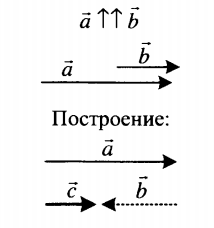
Суммой двух сонаправленных векторов является вектор, направленный в ту же сторону.
Его длина равна сумме длин слагаемых векторов: c = a + b. |
| Сложение двух противоположно направленных векторов | |
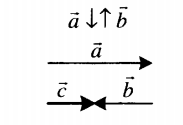 |
Суммой двух противоположно направленных векторов является вектор, направленный в сторону большего по модулю вектора. Его длина равна модулю разности длин слагаемых векторов: c = |a – b|. |
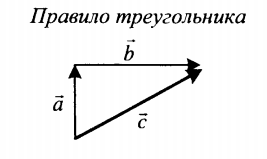
| Сложение двух векторов, расположенных друг к другу под углом | |
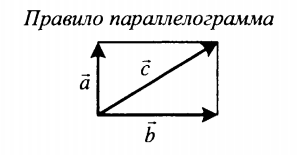
| Суммой двух векторов, расположенных друг к другу под углом является вектор, направление которого определяется графически методом треугольника или параллелограмма. Его длина зависит от величины угла, под которым расположены два слагаемых векторов. | |
 |
Если слагаемые векторы перпендикулярны, для вычисления длины вектора их суммы используется теорема Пифагора:
|
 |
|
 |
Если слагаемые векторы расположены под тупым углом α, для вычисления длины вектора их суммы используется теорема косинусов:
|
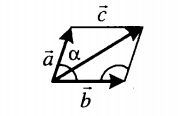 |
Если слагаемые векторы расположены под острым углом α, для вычисления длины вектора их суммы используется теорема косинусов:
|
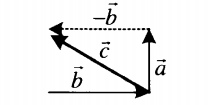
Правила вычитания векторов
Эта таблица иллюстрирует правила вычитания векторов на примере векторов ![]() Результатом их вычитания является вектор
Результатом их вычитания является вектор ![]() .
.
| Вычитание двух сонаправленных векторов | |
 |
Разностью двух сонаправленных векторов является вектор, направленный в сторону большего по модулю вектора.
Его длина равна модулю разности длин вычитаемых векторов: c = |a – b|. |
| Вычитание двух противоположно направленных векторов | |
 |
Разность двух противоположно направленных векторов есть вектор, направленный в сторону уменьшаемого вектора. Его длина равна сумме длин вычитаемых векторов: c = a + b. |
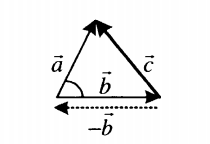
| Вычитание двух векторов, расположенных друг к другу под углом | |
| Разностью двух векторов, расположенных друг к другу под углом является вектор, являющийся обратным вектору, образующемуся при сложении этих векторов. Его направление определяется графически. Его длина зависит от величины угла, под которым расположены два слагаемых векторов. | |
 |
Если вычитаемые векторы перпендикулярны, для вычисления длины вектора их разности используется теорема Пифагора:
|
 |
Если вычитаемые векторы расположены под углом α, для вычисления длины вектора их разности используется теорема косинусов:
|
Задание EF17727
Два автомобиля движутся по прямому шоссе, первый — со скоростью v, второй — со скоростью –4v. Найти скорость второго автомобиля относительно первого.
Алгоритм решения
- Записать данные в определенной системе отсчета.
- Изобразить графическую модель ситуации задачи.
- Записать классический закон сложения скоростей в векторном виде.
- Записать классический закон сложения скоростей в векторном виде применительно к условиям задачи.
- Найти искомую величину.
Решение
Записываем данные относительно Земли:
- Скорость первого автомобиля относительно оси ОХ: v1 = v.
- Скорость второго автомобиля относительно оси ОХ: v2 = –4v.
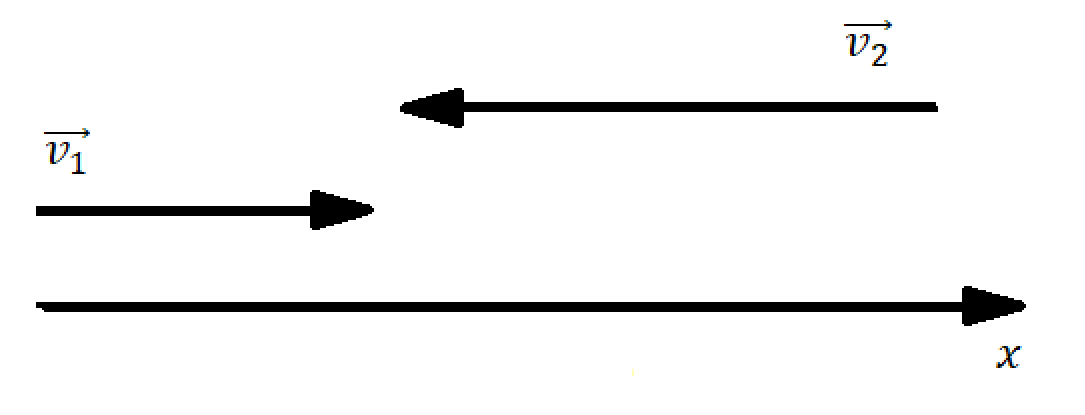
Изображаем графическую модель ситуации. Так как у второго автомобиля перед вектором скорости стоит знак «–», первый и второй автомобили движутся во взаимно противоположных направлениях.
Записываем закон сложения скоростей в векторном виде:
v′ = v + u
v′ — скорость второго автомобиля относительно оси ОХ (v2), v — скорость второго автомобиля относительно системы отсчета, связанной с первым автомобилем, u — скорость движения первого автомобиля относительно оси ОХ (v1).
Закон сложения скоростей в векторном виде применительно к условиям задачи будет выглядеть так:
v2 = v + v1
Отсюда:
v = v2 — v1 = –4v – v = –5v
Ответ: -5v
pазбирался: Алиса Никитина | обсудить разбор
Задание EF17518
Два автомобиля движутся в одном направлении. Относительно Земли скорость первого автомобиля 110 км/ч, второго 60 км/ч. Чему равен модуль скорости первого автомобиля в системе отсчёта, связанной со вторым автомобилем?
Алгоритм решения
- Записать данные в определенной системе отсчета.
- Изобразить графическую модель ситуации задачи.
- Записать классический закон сложения скоростей в векторном виде.
- Выбрать систему отсчета.
- Записать классический закон сложения скоростей в скалярном виде.
- Найти искомую величину.
Решение
Записываем данные относительно Земли:
- Скорость первого автомобиля относительно неподвижной системы отсчета: v1 = 110 км/ч;
- Скорость второго автомобиля относительно Земли: v2 = 60 км/ч.
Изображаем графическую модель ситуации:

Записываем закон сложения скоростей в векторном виде:
v′ = v + u
v′ — скорость автомобиля относительно земли (v1), v — скорость второго автомобиля относительно системы отсчета, связанной со вторым автомобилем, u — скорость движения второго автомобиля относительно земли (v2).
По условию задачи в качестве системы отсчета нужно выбрать второй автомобиль. Так как система отсчета, связанная со вторым автомобилем, и первый автомобиль движутся в одном направлении, классический закон сложения скоростей в скалярном виде будет выглядеть так:
v’ = v + u
Отсюда скорость первого автомобиля в системе отсчёта, связанной со вторым автомобилем:
v = v’ – u = v1 – v2 = 110 – 60 = 50 (км/ч).
По условию задачи ответом должен быть модуль этой скорости. Модуль числа 50 есть 50.Ответ: 50
pазбирался: Алиса Никитина | обсудить разбор
Алиса Никитина | Просмотров: 7.4k
2.2.1 Как перевести из км/ч в м/с и т. д?
В задачах часто необходимо переводить из одних единиц измерения в другие:
1 км/ч = (1000 м)/(3600 с) = 5/18 м/с,
1 м/с = 18/5 км/ч,
1 км/с = 1000 м/с,
1 см/с = 0,01 м/с,
1 м/мин = 1/60 м/с.
Например, если  то для того, чтобы перевести в м/с, нужно умножить на 5/18:
то для того, чтобы перевести в м/с, нужно умножить на 5/18:

2.2.2 Как найти скорость тела, если известен закон движения?
Закон равномерного движения имеет вид:

Видим, что в этой формуле скорость стоит коэффициентом перед временем. Поэтому, если в условии задачи дан закон движения, необходимо посмотреть на коэффициент перед t — это и есть скорость.
Например, пусть закон движения имеет вид:  В данном случае коэффициент перед t равен 5, следовательно,
В данном случае коэффициент перед t равен 5, следовательно, 
2.2.3 Как определить скорость по графику координаты от времени?
Закон равномерного движения имеет вид:
Графиком этого закона является прямая линия. Так как  — коэффициент перед t, то является угловым коэффициентом прямой.
— коэффициент перед t, то является угловым коэффициентом прямой.

Для графика 1:

То, что график 1 «поднимается вверх», означает — тело едет в положительном направлении оси Ox.
Для графика 2:

То, что график 2 «опускается вниз», означает — тело едет в отрицательном направлении оси Ox.
Для определения  и
и  выбираем такие точки на графике, в которых можно точно определить значения, как правило, это точки, находящиеся в вершинах клеток.
выбираем такие точки на графике, в которых можно точно определить значения, как правило, это точки, находящиеся в вершинах клеток.
2.2.4 Как найти закон движения, если известны координаты тела в моменты времени  и
и  ?
?
Пусть в момент времени тело находилось в точке с координатой  а в момент времени тело находилось в точке с координатой
а в момент времени тело находилось в точке с координатой 
Для времени имеем:

Для времени имеем:

Решая систему уравнений (2.19) и (2.20), получим


2.2.5 Как найти графически момент и координату встречи двух тел?
Пусть даны законы движения двух тел:  и
и  Согласно пункту 2.5 графиками обоих законов являются прямые линии. Необходимо на одном графике построить оба закона.
Согласно пункту 2.5 графиками обоих законов являются прямые линии. Необходимо на одном графике построить оба закона.
Графики пересекаются в одной точке. Координаты этой точки и являются временем и местом встречи.
2.2.6 Как аналитически найти координату и время встречи двух тел?
Пусть даны законы движения двух тел: и  В момент встречи тела оказываются в одной координате, то есть
В момент встречи тела оказываются в одной координате, то есть  и необходимо решить уравнение:
и необходимо решить уравнение:

Решение уравнения имеет вид:

Для нахождения координаты достаточно подставить вместо t найденное значение  в любой из законов движения:
в любой из законов движения:

или

2.2.7 Как найти среднюю скорость, если тело половину пути проехало со скоростью  а вторую половину пути
а вторую половину пути 
По определению (2.8):

В нашем случае, так как на каждой половине пути тело едет с постоянной скоростью, то

Получаем

В общем случае, если весь путь разбить на n равных участков, на каждом из которых тело едет с постоянной скоростью, то

Формула справедлива только если весь путь разбит на равные участки. Если же разбиение будет иное, то, естественно, формула для нахождения средней скорости, будет иной.
2.2.8 Как найти среднюю скорость, если тело половину времени проехало со скоростью а вторую половину времени
По определению (2.8):
В нашем случае, так как каждую половину времени тело едет с постоянной скоростью, то

Получаем

В общем случае, если все время разбито на n равных промежутков, на каждом из которых тело едет с постоянной скоростью, то

Формула справедлива только если все время разбито на равные промежутки. Если же разбиение будет иное, то, естественно, формула для нахождения средней скорости, будет иной.
2.2.9 Как найти скорость, с которой движется моторная лодка по течению реки?
Согласно формуле  скорость тела относительно неподвижной системы отсчета
скорость тела относительно неподвижной системы отсчета  (в нашем случае земли), равна векторной сумме скорости подвижной системы отсчета u (в нашем случае — скорость реки) и скорости в подвижной системе отсчета
(в нашем случае земли), равна векторной сумме скорости подвижной системы отсчета u (в нашем случае — скорость реки) и скорости в подвижной системе отсчета  (в нашем случае — собственная скорость лодки).
(в нашем случае — собственная скорость лодки).

При движении по течению вектора  и
и  направлены в одну сторону, следовательно, получаем сложение двух векторов, направленных в одну сторону — используем формулу (1.15):
направлены в одну сторону, следовательно, получаем сложение двух векторов, направленных в одну сторону — используем формулу (1.15):

Таким образом, при движении любого тела по течению его скорость определяется формулой
2.2.10 Как найти скорость, с которой движется моторная лодка против течения реки?
Согласно формуле скорость тела относительно неподвижной системы отсчета (в нашем случае земли) равна векторной сумме скорости подвижной системы отсчета u (в нашем случае — скорость реки) и скорости в подвижной системе отсчета (в нашем случае — собственная скорость лодки).

Перепишем формулу в виде:

Вектора и  направлены в одну сторону, следовательно, получаем вычитание двух векторов, направленных в одну сторону — используем формулу
направлены в одну сторону, следовательно, получаем вычитание двух векторов, направленных в одну сторону — используем формулу  :
:

2.2.11 Как найти скорость, с которой движется моторная лодка, если ее скорость направлена перпендикулярно течению реки?
Согласно формуле скорость тела относительно неподвижной системы отсчета (в нашем случае земли), равна векторной сумме скорости подвижной системы отсчета u (в нашем случае — скорость реки) и скорости в подвижной системе отсчета (в нашем случае — собственная скорость лодки).
В данном случае вектора и  направлены перпендикулярно, следовательно, получаем задачу о сложении взаимно перпендикулярных векторов — используем формулу
направлены перпендикулярно, следовательно, получаем задачу о сложении взаимно перпендикулярных векторов — используем формулу  :
:

2.2.12 Как найти расстояние, на которое снесет лодку, если ее скорость направлена перпендикулярно скорости реки?
В результате сложения скоростей по формуле скорость тела относительно земли равна и направлена по прямой OD. В результате, когда тело окажется на противоположном берегу, оно попадет в точке D, и его снесет на длину 
Треугольник OAB подобен треугольнику OCD:

2.2.13 Как найти скорость, с которой движется моторная лодка, если ее скорость направлена под углом φ к скорости течения реки?
Согласно формуле скорость тела относительно неподвижной системы отсчета (в нашем случае земли), равна векторной сумме скорости подвижной системы отсчета u (в нашем случае — скорость реки) и скорости в подвижной системе отсчета (в нашем случае — собственная скорость лодки).
В результате сложения скоростей по формуле скорость тела относительно земли равна и направлена по прямой OB. Как видим, получили треугольник, в котором известен один из углов — Тогда по теореме косинусов:
Тогда по теореме косинусов:

2.2.14 Как найти расстояние, на которое снесет лодку, если ее скорость направлена под углом  к скорости течения реки?
к скорости течения реки?
В результате сложения скоростей по формуле скорость тела относительно земли равна и направлена по прямой OB. В результате, когда тело окажется на противоположном берегу, оно попадет в точке В, и его снесет на длину 
В задачах, когда движение происходит в плоскости, то есть и вдоль оси Ox, и вдоль оси Oy, необходимо введение системы координат для того, чтобы упростить рассмотрение задачи.
Проекция 

Проекция 

Формулы  и
и  не просто результат математической операции нахождения проекции, и
не просто результат математической операции нахождения проекции, и  имеют физический смысл: со скоростью тело плывет вдоль оси Ox, то есть по течению; со скоростью тело переплывает реку. Например, время, за которое тело переплывет реку, можно найти просто поделив ширину реки на
имеют физический смысл: со скоростью тело плывет вдоль оси Ox, то есть по течению; со скоростью тело переплывает реку. Например, время, за которое тело переплывет реку, можно найти просто поделив ширину реки на

Тогда

2.2.15 Под каким углом α нужно направить собственную скорость лодки, чтобы за минимальное время переплыть реку?
Согласно формуле скорость, с которой лодка переплывает реку, равна:

Очевидно, что время будет минимальным, если будет максимальным, то есть 
2.2.16 С какой скоростью машина обгоняет вторую машину, если они движутся в одну сторону?
Пусть 1-ая машина движется вправо со скоростью  а 2-ая машина также движется вправо со скоростью
а 2-ая машина также движется вправо со скоростью  Скорость обгона — это скорость, с которой 1-ая машина движется относительно 2-ой, то есть — это относительная скорость, и она определяется формулой :
Скорость обгона — это скорость, с которой 1-ая машина движется относительно 2-ой, то есть — это относительная скорость, и она определяется формулой :

Так как  и
и  направлены в одну сторону, то получили задачу о вычитании векторов, направленных в одну сторону — формула :
направлены в одну сторону, то получили задачу о вычитании векторов, направленных в одну сторону — формула :

Заметим, что при обгоне, естественно  поэтому
поэтому 
2.2.17 За какое время проедут мимо друг друга два поезда, двигающиеся в одном направлении?
Пусть длина 1-го поезда  а скорость 2-го поезда
а скорость 2-го поезда  Скорость обгона определяется формулой Тогда
Скорость обгона определяется формулой Тогда

2.2.18 С какой скоростью машина едет навстречу вторую машину, если они движутся в противоположных направлениях?
Пусть 1-ая машина движется вправо со скоростью а 2-ая машина движется влево со скоростью Скорость движения навстречу — это скорость, с которой 1-ая машина движется относительно 2-ой, то есть — это относительная скорость, и она определяется формулой :
Перепишем эту формулу в виде:

Так как и  направлены в одну сторону, то получили задачу о вычитании векторов, направленных в одну сторону — формула :
направлены в одну сторону, то получили задачу о вычитании векторов, направленных в одну сторону — формула :

2.2.19 За какое время проедут мимо друг друга два поезда, двигающиеся в противоположных направлениях?
Пусть длина 1-го поезда а скорость 2-го поезда Скорость обгона определяется формулой Тогда

2.2.20 Как найти относительную скорость, если тела движутся по взаимно перпендикулярным направлениям?
Пусть 1-ая машина движется вправо со скоростью а 2-ая машина движется перпендикулярно первой со скоростью Относительная скорость определяется формулой :
Так как вектора и перпендикулярны, то воспользуемся формулой :

From Wikipedia, the free encyclopedia
The relative velocity  (also
(also  or
or  ) is the velocity of an object or observer B in the rest frame of another object or observer A.
) is the velocity of an object or observer B in the rest frame of another object or observer A.
Classical mechanics[edit]
In one dimension (non-relativistic)[edit]

Relative motion man on train
We begin with relative motion in the classical, (or non-relativistic, or the Newtonian approximation) that all speeds are much less than the speed of light. This limit is associated with the Galilean transformation. The figure shows a man on top of a train, at the back edge. At 1:00 pm he begins to walk forward at a walking speed of 10 km/h (kilometers per hour). The train is moving at 40 km/h. The figure depicts the man and train at two different times: first, when the journey began, and also one hour later at 2:00 pm. The figure suggests that the man is 50 km from the starting point after having traveled (by walking and by train) for one hour. This, by definition, is 50 km/h, which suggests that the prescription for calculating relative velocity in this fashion is to add the two velocities.
The diagram displays clocks and rulers to remind the reader that while the logic behind this calculation seem flawless, it makes false assumptions about how clocks and rulers behave. (See The train-and-platform thought experiment.) To recognize that this classical model of relative motion violates special relativity, we generalize the example into an equation:

where:
- is the velocity of the Man relative to Earth,
- is the velocity of the Man relative to the Train,
- is the velocity of the Train relative to Earth.



Fully legitimate expressions for «the velocity of A relative to B» include «the velocity of A with respect to B» and «the velocity of A in the coordinate system where B is always at rest». The violation of special relativity occurs because this equation for relative velocity falsely predicts that different observers will measure different speeds when observing the motion of light. [note 1]
In two dimensions (non-relativistic)[edit]

Relative velocities between two particles in classical mechanics
The figure shows two objects A and B moving at constant velocity. The equations of motion are:


where the subscript i refers to the initial displacement (at time t equal to zero). The difference between the two displacement vectors,  , represents the location of B as seen from A.
, represents the location of B as seen from A.

Hence:

After making the substitutions  and
and  , we have:
, we have:


Galilean transformation (non-relativistic)[edit]
To construct a theory of relative motion consistent with the theory of special relativity, we must adopt a different convention. Continuing to work in the (non-relativistic) Newtonian limit we begin with a Galilean transformation in one dimension:[note 2]


where x’ is the position as seen by a reference frame that is moving at speed, v, in the «unprimed» (x) reference frame.[note 3] Taking the differential of the first of the two equations above, we have,  , and what may seem like the obvious[note 4] statement that
, and what may seem like the obvious[note 4] statement that  , we have:
, we have:

To recover the previous expressions for relative velocity, we assume that particle A is following the path defined by dx/dt in the unprimed reference (and hence dx′/dt′ in the primed frame). Thus  and
and  , where
, where  and
and  refer to motion of A as seen by an observer in the unprimed and primed frame, respectively. Recall that v is the motion of a stationary object in the primed frame, as seen from the unprimed frame. Thus we have
refer to motion of A as seen by an observer in the unprimed and primed frame, respectively. Recall that v is the motion of a stationary object in the primed frame, as seen from the unprimed frame. Thus we have  , and:
, and:

where the latter form has the desired (easily learned) symmetry.
Special relativity[edit]
As in classical mechanics, in Special Relativity the relative velocity  is the velocity of an object or observer B in the rest frame of another object or observer A. However, unlike the case of classical mechanics, in Special Relativity, it is generally not the case that
is the velocity of an object or observer B in the rest frame of another object or observer A. However, unlike the case of classical mechanics, in Special Relativity, it is generally not the case that

This peculiar lack of symmetry is related to Thomas precession and the fact that two successive Lorentz transformations rotate the coordinate system. This rotation has no effect on the magnitude of a vector, and hence relative speed is symmetrical.

Parallel velocities[edit]
In the case where two objects are traveling in parallel directions, the relativistic formula for relative velocity is similar in form to the formula for addition of relativistic velocities.

The relative speed is given by the formula:

Perpendicular velocities[edit]
In the case where two objects are traveling in perpendicular directions, the relativistic relative velocity is given by the formula:

where

The relative speed is given by the formula

General case[edit]
The general formula for the relative velocity of an object or observer B in the rest frame of another object or observer A is given by the formula:[1]
![{displaystyle {vec {v}}_{mathrm {B|A} }={frac {1}{gamma _{mathrm {A} }left(1-{frac {{vec {v}}_{mathrm {A} }{vec {v}}_{mathrm {B} }}{c^{2}}}right)}}left[{vec {v}}_{mathrm {B} }-{vec {v}}_{mathrm {A} }+{vec {v}}_{mathrm {A} }(gamma _{mathrm {A} }-1)left({frac {{vec {v}}_{mathrm {A} }cdot {vec {v}}_{mathrm {B} }}{v_{mathrm {A} }^{2}}}-1right)right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/df4dfe757c619047b27a74f71b219a91abc01113)
where
The relative speed is given by the formula

See also[edit]
- Doppler effect
- Non-Euclidean geometry § Kinematic geometries
- Peculiar velocity
- Proper motion
- Range rate
- Radial velocity
- Rapidity
- Relativistic speed
- Space velocity (astronomy)
Notes[edit]
- ^ For example, replace the «Man» by a photon traveling at the speed of light.
- ^ This result is valid if all motion is restricted to the x-axis, but can be easily generalized by replacing the first equation by
- ^ It is easy to be confused about the minus sign before v, or whether v is defined in the prime or unprimed reference frame. It might help to visualize the fact that if x = vt, then x′ = 0, meaning that a particle that is following the path x = vt is at rest in the primed reference frame.
- ^ Keep in mind that, due to time dilation, dt = dt′ is valid only in the approximation that the speed is much less than that of light.

References[edit]
- ^ Fock 1964 The theory of Space Time and Gravitation, retrieved from https://archive.org/details/TheTheoryOfSpaceTimeGravitation
Further reading[edit]
- Alonso & Finn, Fundamental University Physics ISBN 0-201-56518-8
- Greenwood, Donald T, Principles of Dynamics.
- Goodman and Warner, Dynamics.
- Beer and Johnston, Statics and Dynamics.
- McGraw Hill Dictionary of Physics and Mathematics.
- Rindler, W., Essential Relativity.
- KHURMI R.S., Mechanics, Engineering Mechanics, Statics, Dynamics
External links[edit]
- Relative Motion at HyperPhysics
- A Java applet illustrating Relative Velocity, by Andrew Duffy
- Relatív mozgás (1)…(3) Relative motion of two train (1)…(3). Videos on the portal FizKapu. (in Hungarian)
- Sebességek összegzése Relative tranquility of trout in creek. Video on the portal FizKapu. (in Hungarian)
Сложное движение точки. Теорема Кориолиса
Здесь мы покажем, что при сложном движении, абсолютная скорость точки равна векторной сумме относительной и переносной скоростей:
.
Абсолютное ускорение точки равно векторной сумме относительного, переносного и кориолисова (поворотного) ускорений:
,
где – кориолисово ускорение.
Пример применения изложенной ниже теории приводится на странице “Сложное движение точки. Пример решения задачи”.
Сложное (составное) движение точки
Часто встречаются случаи, когда точка совершает известное движение относительно некоторого твердого тела. А это тело, в свою очередь, движется относительно неподвижной системы координат. Причем движение точки относительно тела и закон движения тела относительно неподвижной системы координат известны или заданы. Требуется найти кинематические величины (скорость и ускорение) точки относительно неподвижной системы координат.
Такое движение точки называется сложным или составным.
Сложное или составное движение точки – это движение в подвижной системе координат. То есть движение точки описывается в системе координат, которая сама совершает движение относительно неподвижной системы координат.
Далее, для ясности изложения, будем считать, что подвижная система координат жестко связана с некоторым твердым телом. Мы будем рассматривать движение точки относительно тела (относительное движение) и движение тела относительно неподвижной системы координат (переносное движение).
Относительное движение точки при сложном движении – это движение точки относительно тела (подвижной системы координат) считая, что тело покоится.
Переносное движение точки при сложном движении – это движение точки, жестко связанной телом, вызванное движением тела.
Абсолютное движение точки при сложном движении – это движение точки относительно неподвижной системы координат, вызванное движением тела и движением точки относительно тела.
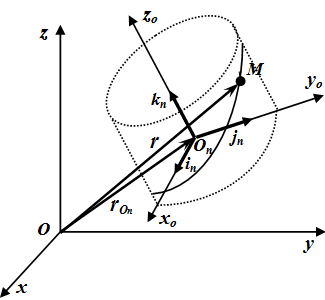
Пусть Oxyz – неподвижная система координат, On xo yo zo – подвижная система координат, жестко связанная с телом. Пусть – единичные векторы (орты), направленные вдоль осей xo , yo , zo подвижной системы координат. Тогда радиус-вектор точки M в неподвижной системе определяется по формуле:
(1) ,
где – радиус-вектор точки On – начала подвижной системы координат, связанной с телом.
Относительная скорость и ускорение
При относительном движении изменяются координаты xo , yo , zo точки относительно тела. А векторы являются постоянными, не зависящими от времени. Дифференцируя (1) по времени, считая постоянными, получаем формулы для относительной скорости и ускорения:
(2) ;
(3) .
Относительная скорость точки при сложном движении – это скорость точки при неподвижном положении тела (подвижной системы координат), вызванная движением точки относительно тела.
Относительное ускорение точки при сложном движении – это ускорение точки при неподвижном положении тела, вызванное движением точки относительно тела.
Переносная скорость и ускорение
При переносном движении изменяются векторы , определяющие положение тела. Относительные координаты точки xo , yo , zo являются постоянными. Дифференцируя (1) по времени, считая xo , yo , zo постоянными, получаем формулы для переносной скорости и ускорения:
(4) ;
(5) .
Переносная скорость точки при сложном движении – это скорость точки, жестко связанной с телом, вызванная движением тела.
Переносное ускорение точки при сложном движении – это ускорение точки, жестко связанной с телом, вызванное движением тела.
Производные по времени от – это скорость и ускорение начала подвижной системы координат On : ; .
Найдем формулы для производных по времени от векторов . Для этого возьмем две произвольные точки твердого тела A и B . Их скорости связаны соотношением:
(см. страницу “Скорость и ускорение точек твердого тела”). Рассмотрим вектор , проведенный из точки A в точку B . Тогда
.
Дифференцируем по времени и применяем предыдущую формулу:
.
Итак, мы нашли формулу для производной по времени от вектора, соединяющего две точки тела:
.
Поскольку векторы жестко связаны с телом, то их производные по времени определяются по этой формуле:
(6) , , .
Подставляем в (4):
.
Таким образом, выражение (4) приводит к формуле для скорости точек твердого тела.
Выполняя подобные преобразования над формулой (5), получим формулу для ускорения точек твердого тела:
,
где – угловое ускорение тела.
Абсолютная скорость и ускорение
При абсолютном движении изменяются как векторы , определяющие положение тела, так и относительные координаты точки xo , yo , zo .
Абсолютная скорость точки при сложном движении – это скорость точки в неподвижной системе координат.
Абсолютное ускорение точки при сложном движении – это ускорение точки в неподвижной системе координат.
Теорема о сложении скоростей
При составном движении абсолютная скорость точки равна векторной сумме относительной и переносной скоростей:
.
Доказательство
Дифференцируем (1) по времени, применяя правила дифференцирования суммы и произведения. Затем подставляем (2) и (4).
(1) ;
(7)
.
Теорема Кориолиса о сложении ускорений
При составном движении абсолютное ускорение точки равно векторной сумме относительного, переносного и кориолисова (поворотного) ускорений:
,
где
– кориолисово ускорение.
Доказательство
Дифференцируем (7) по времени, применяя правила дифференцирования суммы и произведения. Затем подставляем (3) и (5).
(7) .
.
В последнем члене применим (6) и (2).
.
Тогда
.
Автор: Олег Одинцов . Опубликовано: 23-10-2015
Основные понятия кинематики. Скорость. Средняя скорость. Относительная скорость. Сложение перемещений и скоростей
Этот видеоурок доступен по абонементу
У вас уже есть абонемент? Войти

Этот урок посвящён разделу физики, который называется кинематика. Мы узнаем, что изучает кинематика, основные понятия этого раздела. Также на этом уроке будут подробно показаны решения трёх типовых задач различной сложности, которые взяты из сборника задач для подготовки к единому государственному экзамену. Задачи на нахождение средней и относительной скорости.
Относительность механического движения
теория по физике 🧲 кинематика
Под относительностью понимают зависимость чего-либо от выбора системы отсчета. Так, покой и движение тела, его положение в пространстве всегда относительны. Человек, сидящий внутри движущегося автомобиля, покоится относительно этого автомобиля. Но относительно предметов снаружи он движется с некоторой скоростью.
Относительность перемещения
Пусть движение материальной точки (МТ) описывается относительно двух систем отсчета: подвижной (ПСО) и неподвижной (НСО). Зная, как эта точка движется относительно ПСО, и, как ПСО движется относительно НСО, можно вычислить перемещение точки относительно НСО. В этом заключается правило сложения перемещений:
s′ — перемещение МТ относительно НСО, s 1— перемещение МТ относительно ПСО, s 2 — перемещение ПСО относительно НСО.
Чтобы применять правило сложения перемещений, нужно уметь складывать вектора.
Полезные факты
- Если тело движется в направлении движения ПСО, то модуль его перемещения относительно НСО равен сумме модулей перемещения этого тела относительно ПСО и перемещения ПСО относительно НСО:
- Если тело движется противоположно движению ПСО, то модуль его перемещения относительно НСО равен разности модулей перемещения этого тела относительно ПСО и перемещения ПСО относительно НСО:
- Если тело движется под прямым углом по отношению к направлению движения ПСО, то модуль его перемещения относительно НСО равен корню из суммы квадратов перемещений этого тела относительно ПСО и перемещения ПСО относительно НСО:
- Если относительно ПСО тело покоится, то его перемещение относительно НСО равно перемещению ПСО относительно НСО: при s1=0,перемещение s′ = s2
- Если тело движется относительно двух НСО, то его перемещение относительно НСО1 равно перемещению движения относительно НСО2. В этом случае одну из систем можно принять за ПСО с нулевой скоростью. Тогда ее перемещение относительно НСО будет равно 0. При s2=0,перемещение s′ = s1
Пример №1. Человек прошел в автобусе 2 метра в направлении заднего выхода. За это же время автобус успел переместиться относительно остановки на 10 м. Найти перемещение человека относительно автобусной остановки.
Так как человек двигался в сторону конца автобуса, он двигался противоположно его движению. В этом случае его перемещение будет равно модулю разности перемещений, совершенных человеком относительно автобуса и автобусом относительно остановки:
Относительность скорости в ПСО и НСО
Тела и системы отсчета могут двигаться с различной скоростью. Но, зная скорость движения МТ относительно ПСО и скорость движения ПСО относительно НСО, можно вычислить скорость движения МТ относительно НСО. В этом заключается правило сложения скоростей:
v′ — скорость МТ относительно НСО, v — скорость МТ относительно ПСО, u — скорость движения ПСО относительно НСО.
Складывая векторы скоростей, нужно пользоваться правилами сложения векторов.
Полезные факты
- Если тело движется в направлении движения ПСО, то модуль его скорости относительно НСО равен сумме модулей скорости этого тела относительно ПСО и скорости ПСО относительно НСО:
- Если тело движется противоположно движению ПСО, то модуль его скорости относительно НСО равен разности модуля скорости этого тела относительно ПСО и скорости ПСО относительно НСО:
- Если тело движется под прямым углом по отношению к направлению движения ПСО, то модуль его скорости относительно НСО равен корню из суммы квадратов скорости этого тела относительно ПСО и скорости ПСО относительно НСО:
- Если относительно ПСО тело покоится, то его скорость относительно НСО равна скорости ПСО относительно НСО: при v=0,скорость v′ = u
- Если тело движется относительно двух НСО, то его скорость относительно НСО1 равна скорости движения относительно НСО2. В этом случае одну из неподвижных систем можно принять за ПСО с нулевой скоростью. При u=0,скорость v′ = u
Пример №2. Моторная лодка должна пересечь реку, скорость течения которой равна 5 км/ч, по кратчайшему пути. Собственная скорость лодки равна 10 км/ч. Определить, под каким углом к берегу должна быть направлена лодка, чтобы она не отклонялась от кратчайшего пути.
Кратчайшим путем между двумя параллельными линиями является отрезок, заключенный между этими линиями при условии, что он лежит на прямой, пересекающей эти линии под прямым углом. На рисунке этот путь отметим отрезком АВ.
Лодка движется прямолинейно. Поэтому направление ее скорости относительно берега совпадает с направлением перемещения:
Векторы скоростей образуют прямоугольный треугольник, и собственная скорость лодки направлена к берегу под некоторым углом α. Косинус этого угла равен отношению прилегающего катета (скорости лодки относительно реки) к гипотенузе (скорости течения реки):
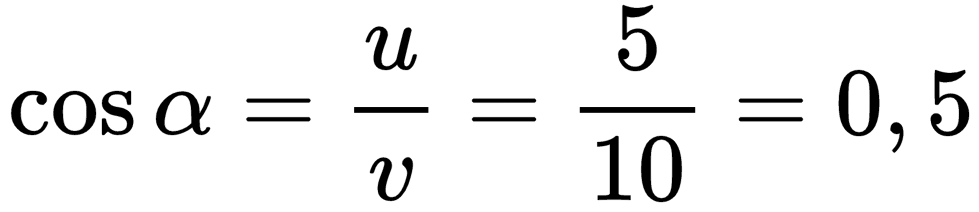
Косинусу 0,5 соответствует угол, равный 60 градусам.
Относительная скорость двух тел
Понятие относительной скорости вводится, когда рассматривается движение двух тел относительно друг друга внутри одной и той же системы отсчета (СО). Примером служат два движущихся автомобиля, в то время как их движение рассматривается относительно неподвижного объекта.
Относительная скорость равна векторной разности скоростей первого и второго тела относительно СО:
v отн — относительная скорость, или скорость первого тела относительно второго, v 1 и v 2 — скорость первого и второго тела относительно СО.
Варианты обозначения относительной скорости и их проекций:
- v 12 — скорость первого тела относительно второго. Ее проекция равна:
- v 21 — скорость второго тела относительно первого. Ее проекция равна v21x = v2x — v1x
Для вычисления относительной скорости движения тела важно уметь применять правила вычитания векторов.
Полезные факты
- Если тела движутся в одном направлении, то относительная скорость равна модулю разности скоростей первого и второго тела:
- Если тела движутся в противоположных направлениях, то относительная скорость равна сумме скоростей первого и второго тела:
- Если тела движутся взаимно перпендикулярно, то относительная скорость равна корню из суммы квадратов скоростей первого и второго тела:
Пример №3. Два автомобиля движутся противоположно друг другу. Скорость первого автомобиля относительно дороги равна 100 км/ч. Скорость второго автомобиля относительно первого равна 180 км/ч. Найти модуль скорости второго автомобиля относительно дороги.
Так как автомобили движутся в противоположном направлении, относительная скорость равна сумме скоростей первого и второго автомобиля. Поэтому скорость второго равна разности относительной скорости и скорости движения второго тела, которым в данном случае является первый автомобиль:

Скорость второго автомобиля относительно дороги равна 80 км/час.
Правила сложения векторов
Эта таблица иллюстрирует правила сложения векторов на примере векторов a и b . Результатом их сложения является вектор c .
| Сложение двух сонаправленных векторов | |
|
Суммой двух сонаправленных векторов является вектор, направленный в ту же сторону. Его длина равна сумме длин слагаемых векторов: c = a + b. |
| Сложение двух противоположно направленных векторов | |
|
Суммой двух противоположно направленных векторов является вектор, направленный в сторону большего по модулю вектора. Его длина равна модулю разности длин слагаемых векторов: c = |a – b|. |
| Сложение двух векторов, расположенных друг к другу под углом | |
| Суммой двух векторов, расположенных друг к другу под углом является вектор, направление которого определяется графически методом треугольника или параллелограмма. Его длина зависит от величины угла, под которым расположены два слагаемых векторов. | |
|
Если слагаемые векторы перпендикулярны, для вычисления длины вектора их суммы используется теорема Пифагора:  . . |
|
|
|
Если слагаемые векторы расположены под тупым углом α, для вычисления длины вектора их суммы используется теорема косинусов:  . . |
|
Если слагаемые векторы расположены под острым углом α, для вычисления длины вектора их суммы используется теорема косинусов:  . . |
Правила вычитания векторов
Эта таблица иллюстрирует правила вычитания векторов на примере векторов  Результатом их вычитания является вектор
Результатом их вычитания является вектор  .
.
| Вычитание двух сонаправленных векторов | |
|
Разностью двух сонаправленных векторов является вектор, направленный в сторону большего по модулю вектора. Его длина равна модулю разности длин вычитаемых векторов: c = |a – b|. |
| Вычитание двух противоположно направленных векторов | |
|
Разность двух противоположно направленных векторов есть вектор, направленный в сторону уменьшаемого вектора. Его длина равна сумме длин вычитаемых векторов: c = a + b. |
| Вычитание двух векторов, расположенных друг к другу под углом | |
| Разностью двух векторов, расположенных друг к другу под углом является вектор, являющийся обратным вектору, образующемуся при сложении этих векторов. Его направление определяется графически. Его длина зависит от величины угла, под которым расположены два слагаемых векторов. | |
|
Если вычитаемые векторы перпендикулярны, для вычисления длины вектора их разности используется теорема Пифагора:  . . |
|
Если вычитаемые векторы расположены под углом α, для вычисления длины вектора их разности используется теорема косинусов:  . . |
Два автомобиля движутся по прямому шоссе, первый — со скоростью v , второй — со скоростью –4 v . Найти скорость второго автомобиля относительно первого.
Алгоритм решения
- Записать данные в определенной системе отсчета.
- Изобразить графическую модель ситуации задачи.
- Записать классический закон сложения скоростей в векторном виде.
- Записать классический закон сложения скоростей в векторном виде применительно к условиям задачи.
- Найти искомую величину.
Решение
Записываем данные относительно Земли:
- Скорость первого автомобиля относительно оси ОХ: v 1 = v .
- Скорость второго автомобиля относительно оси ОХ: v 2 = –4 v .
Изображаем графическую модель ситуации. Так как у второго автомобиля перед вектором скорости стоит знак «–», первый и второй автомобили движутся во взаимно противоположных направлениях.
Записываем закон сложения скоростей в векторном виде:
v ′ — скорость второго автомобиля относительно оси ОХ ( v 2), v — скорость второго автомобиля относительно системы отсчета, связанной с первым автомобилем, u — скорость движения первого автомобиля относительно оси ОХ ( v 1).
Закон сложения скоростей в векторном виде применительно к условиям задачи будет выглядеть так:
pазбирался: Алиса Никитина | обсудить разбор | оценить
Записываем закон сложения скоростей в векторном виде:
v ′ — скорость автомобиля относительно земли ( v 1), v — скорость второго автомобиля относительно системы отсчета, связанной со вторым автомобилем, u — скорость движения второго автомобиля относительно земли ( v 2). По условию задачи в качестве системы отсчета нужно выбрать второй автомобиль. Так как система отсчета, связанная со вторым автомобилем, и первый автомобиль движутся в одном направлении, классический закон сложения скоростей в скалярном виде будет выглядеть так:
Отсюда скорость первого автомобиля в системе отсчёта, связанной со вторым автомобилем:
По условию задачи ответом должен быть модуль этой скорости. Модуль числа 50 есть 50.Ответ: 50
pазбирался: Алиса Никитина | обсудить разбор | оценить
http://interneturok.ru/lesson/physics/11-klass/podgotovka-k-ege/osnovnye-ponyatiya-kinematiki-skorost-srednyaya-skorost-otnositelnaya-skorost-slozhenie-peremescheniy-i-skorostey
Теория относительности имеет дело с относительным движением объекта по отношению к другой системе отсчета. Он описывает движение между двумя разными кадрами, взаимодействующими друг с другом.
Относительная скорость — это один из терминов, описывающих относительное движение двух тел. Это скорость объекта, наблюдаемого наблюдателем в другой системе отсчета, будь то в неподвижной или движущейся системе отсчета. Относительная скорость самолета связана с движением самолета в воздухе, измеренным наблюдателем в другой системе отсчета.
В этом посте вы узнаете о относительная скорость самолета в различных аспектах.
Что такое относительная скорость самолета?
Все мы в детстве очень любили наблюдать за самолетом с земли. Мы наблюдаем за скоростью, с которой движется самолет. Самолет движется и находится в другой системе отсчета, а мы на земле в состоянии покоя.

Изображение кредита: Wikimedia Commons
Относительная скорость самолета определяется как «скорость самолета, движущегося в воздухе, измеряется наблюдателем в другой системе отсчета, либо неподвижной, либо движущейся с той же или переменной скоростью». На движение самолета в воздухе влияет различные аэродинамические факторы, которые могут влиять или не влиять на скорость самолета.

Относительная скорость самолета связана со скоростью воздуха или скоростью ветра. Относительная скорость самолета, измеренная в воздухе, отличается от скорости, измеренной на земле. Это утверждение означает, что при измерении скорости самолета в воздушной среде измеренное значение скорости отличается от значения, полученного от наблюдателя, измерившего скорость самолета с земли.
Это действительно говорит о том, что скорость неточна; это относительно кадра и наблюдателя, наблюдающего за событием. Интересен тот факт, что относительная скорость самолета для пассажира, сидящего внутри самолета, равна нулю, так как они находятся в одной системе отсчета.
Как найти относительную скорость самолета?
Чтобы найти относительную скорость самолета относительно другой системы отсчета, рассмотрим пример наблюдателя на земле, который измеряет скорость самолета, летящего в воздухе.
Поскольку самолет летит в воздухе, скорость полета будет влиять на скорость самолета, поэтому необходимо понимать скорость воздуха в самолете. Используя скорость самолета в воздухе и скорость воздуха на земле, можно легко рассчитать скорость самолета, измеренную на земле.
Пусть vPG — скорость самолета, измеренная на земле, и vPA – скорость самолета в воздушной среде, а vGA быть воздушной скорости на земле. Используя закон сложения векторов, скорость самолета относительно земли определяется выражением
vPG = VPA+vGA
Здесь мы взяли скорость воздуха на земле, потому что наблюдатель на земле неподвижен, и только есть движение воздуха, общее в обеих системах отсчета. Таким образом, скорость воздуха на земле помогает найти относительную скорость самолета на земле.
Предположим, что самолет движется со скоростью 250 миль в час по отношению к воздуху, а скорость воздуха на земле составляет 80 миль в час, дуя вертикально на восток, образуя угол 60°, тогда относительная скорость плоскость относительно земли можно записать следующим образом.

Из приведенной выше формулы мы известно, что относительная скорость самолета по отношению к земле
vPG = VPA+vGA
Величина скорость самолета относительно на землю дается как
Где; i и j — единичный вектор. Единичный вектор j равен 0, потому что компоненты j вдоль земли равны нулю.
Величина скорости воздуха на земле определяется как
Решив приведенное выше уравнение, мы получим
Так как
и
Величина относительной скорости самолета в воздухе определяется выражением
Решая для y-компонент, мы получаем
Здесь отрицательный знак указывает на то, что самолет движется в направлении, противоположном дующему воздуху.
А для c-компонент получаем
Величина любых двух компонентов определяется выражением
Используя это уравнение, мы можем найти x-компоненты; так как мы знаем значение скорости самолета относительно воздуха.
Подставляя значение vPA и vY а затем переставляя, мы получаем vx as
vx = 240.2 мили в час
Направление вектора определяется выражением
Ф=16.06°.
Это дает скорость самолета относительно земли, а также величину и направление, поскольку скорость является векторной величиной.
По какой формуле можно получить относительную скорость самолета?
Движение самолета в воздухе связано с движением воздуха и наблюдателем с земли.
Если нам нужно найти относительную скорость самолета на земле, мы должны учитывать скорость самолета в воздухе и скорость воздуха на земле. Пусть vAB — скорость самолета относительно земли, vBC — скорость воздуха в земле, а vAC — скорость самолета в воздухе, то формула будет
vAB=vBC+vAC
Если скорость самолета измеряется только относительно воздуха, то пусть vA скорость воздуха и vB — скорость самолета, то формула будет
vAB = VA–VB
Оба формулы применимы ко всем типам относительной скорости относительно любой системы отсчета.
Значение относительной скорости самолета
- Понимание относительной скорости самолета объясняет, почему взлет и посадка самолета выполняются на разных взлетно-посадочных полосах в разные дни. И взлет, и посадка самолета связаны с направлением ветра, что требует более низкой путевой скорости, чтобы подняться в воздух.
- Относительная скорость самолета играет жизненно важную роль в управлении воздушным движением.
- Скорость самолета в воздухе называется воздушной скоростью, скорость воздуха над землей называется скоростью ветра, а скорость самолета относительно земли называется путевой скоростью. который помогает нам понять функционирование аэродинамические трубы и полет коршунов.
Часто задаваемые вопросы
Какова роль относительной скорости в управлении воздушным движением?
С относительная скорость указывает направление ветра, он может управлять воздушным движением.
Создание аэродинамической подъемной силы, задающей движение самолета, соответствует относительной скорости самолета и воздуха. Однако мы не можем рассчитать воздушную скорость напрямую, поэтому мы можем рассчитать относительную скорость самолета относительно земли, что помогает найти воздушную скорость. Эта воздушная скорость описывает скорость самолета в воздушной среде и может помочь пилоту взять на себя управление своим самолетом, чтобы можно было контролировать воздушное движение.
Изменяется ли относительная скорость с расстоянием?
Нет, относительная скорость не меняется; оно остается неизменным, пока вы наблюдаете за движением из того же кадра.
Наблюдения и советы этой статьи мы подготовили на основании опыта команды относительная скорость связана только с наблюдением. Например, вы измеряете скорость велосипеда, движущегося с определенной скоростью от автомобиля, который находится в одном метре от велосипеда. Даже когда велосипед движется быстрее и удаляется от вас на 2 м, вы получите ту же относительную скорость, потому что вы преодолели некоторое расстояние относительно этого велосипеда.
Какое значение имеет относительная скорость?
Относительная скорость важна для понимания взаимодействия между двумя объектами в разных кадрах.
По существу, относительная скорость помогает нам понять, находится ли объект в покое или в движении. Понятие относительной скорости помогает нам рассчитать скорость звезд и астероидов относительно Земли. Это также полезно в процессе запуска ракеты и определения скорости.