Что нужно знать о скольжении асинхронного двигателя
Содержание
- 1 Устройство и принцип работы
- 2 Что такое скольжение АД
- 3 Зависимость режимов работы мотора от скольжения
- 4 Способы измерения
- 5 Видео по теме
Одним из основных электромоторов в мире является асинхронный двигатель. Чтобы его использовать в качестве привода, надо понимать, как поведет себя одна из главных переменных характеристик при пуске, изменении нагрузки на валу, колебании электронапряжения и частоты. Этот параметр называется скольжением электродвигателя.

Устройство и принцип работы
Двигатель переменного электротока, в котором скорость вращения ротора меньше скорости вращающегося электромагнитного поля статора, называется асинхронным.
Обмотки статора подключаются к сети синусоидального трехфазного электротока, после чего электромагнитный поток начинает вращаться и пересекает замкнутые токопроводящие витки подвижной части мотора. Под действием наведенной в них ЭДС возникает переменный электроток. Он создает свое магнитное поле, которое заставляет вращаться ротор с асинхронной скоростью следом за полем статора.

Статор представляет собой набранный из изолированных листов электротехнической стали корпус, в который различным способом уложены обмотки возбуждения. Ротор тоже шихтуется из изолированных листов. Они имеют пазы, в которых закрепляются штыри короткозамкнутого ротора или укладывается фазная обмотка. На концах вала ротора расположены подшипники, вставленные в торцевые крышки статора.

Короткозамкнутый ротор (его также называют «беличьей клеткой») состоит из набора стержней из алюминия или меди. По торцам они закольцованы вместе. Это наиболее простая и распространенная конструкция АД.

Мотор, ротор которого содержит 3-х фазную обмотку, называется фазным. Полноценные изолированные витки трех обмоток концами соединены вместе, а их начала выведены на контактные кольца. При помощи щеточного скользящего контакта катушки выведены на внешнее управление.

Что такое скольжение АД
Создание вращающегося магнитного поля (МП) в неподвижной части электрической машины происходит за счет разнесенных на 120 градусов по окружности корпуса витков 3-х катушек. Они образуют одну пару полюсов (p), на практике их может быть больше. Обмотки соединяются «треугольником» или «звездой». Запитываются они от трехфазной сети переменного электротока.
Электроток, сдвинутый по фазе на 120 градусов, протекая по размещенным по окружности виткам 3-х катушек, создает вращающееся МП с синхронной частотой:

Вращающееся МП, пересекая набор замкнутых токопроводящих витков подвижной части машины, создает в них ЭДС. Образовавшаяся в замкнутых рамках ротора электродвижущая сила способствует возникновению переменного электротока, воспроизводящего свое вращающееся электромагнитное поле.
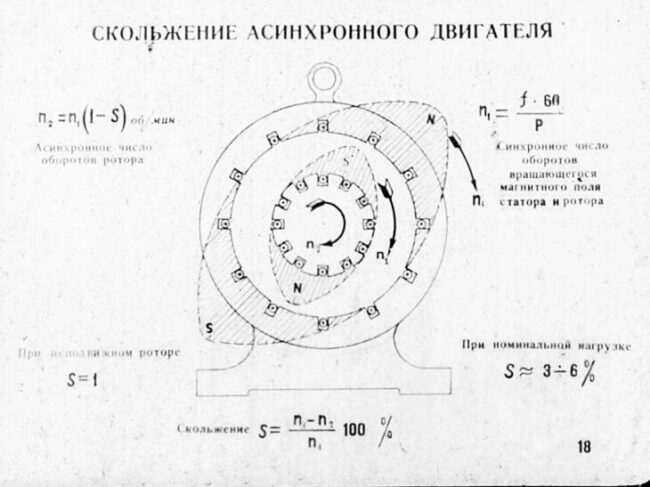
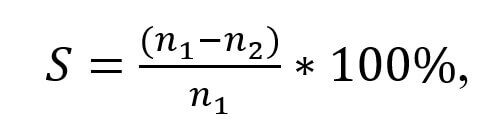
Подвижная часть машины начинает вращаться вслед за вращающимся полем со скоростью n2 (об/мин), стремясь засинхронизировать свое электромагнитное поле с вращающимся полем неподвижной части, то есть, достичь скорости n1 (об/мин). Величина разницы скоростей в относительных единицах или процентах называется коэффициентом скольжения (S):

Асинхронная скорость n2 при нормальной эксплуатации электродвигателя всегда меньше синхронной скорости n1, поэтому скольжение асинхронного двигателя меньше единицы и ста процентов.

Зависимость режимов работы мотора от скольжения
Для АД скольжение рассматривается:
- В режиме холостого хода (ХХ);
- при номинальном значении нагрузки;
- генераторном применении;
- критической нагрузке;
- во время пуска.

Асинхронная скорость n2 в режиме ХХ при отсутствии нагрузки на валу практически равна синхронной скорости вращения электромагнитного поля статора n1. Скольжение в этом случае будет не более 3% и даже в режиме идеального ХХ (если пренебречь трением в подшипниках), оно не будет нулевым.
При номинальном напряжении и нагрузке скольжение S находится в диапазоне 2–8% для большинства моторов. Номинальная скорость или скольжение указываются на шильдике асинхронного двигателя. По ним строится график механической характеристики.
В генераторном режиме скольжение может быть отрицательным, то есть, меньше 0. Ротор в этом случае вращается под действием механической силы навстречу вращающемуся электромагнитному полю статора.
С увеличением нагрузки на валу мотора увеличивается момент торможения, вследствие чего увеличивается и скольжение. При этом растет электроток, наводимый в роторе, наряду с моментом вращения. При небольших нагрузках между моментом и скольжением наблюдается прямо пропорциональная зависимость. Но рост скольжения способствует возрастанию активных потерь в роторе, снижающих наводимый электроток. По этой причине момент увеличивается с меньшей скоростью, чем скольжение, а при определенном значении последнего момент становится максимальным и начинает снижаться. Скольжение, соответствующее максимальному моменту, называется критическим.
При пуске мотора асинхронная скорость равняется нулю, скольжение — единице, электроток в двигателе максимальный, а значение момента вращения вала выше значения момента торможения нагрузки. С увеличением скорости вращения МП ротора скольжение уменьшается, а когда скорость достигает своего номинального значения, устанавливается нормальный режим.

Из графика видно, что скольжение мотора меняется от 0 до 1. До того момента, пока не возникнет критическое скольжение, мотор работает устойчиво, а в промежутке от Sкр до 1 возникает неустойчивый режим, который зависит от характера и величины нагрузки на валу. Для управления в этом диапазоне применяют либо переключение «звезда-треугольник», либо фазный ротор, либо частотное регулирование.
Способы измерения
Измерение скольжения в двигателе должно осуществляться согласно требованиям ГОСТ 7217–89 с помощью амперметра постоянного тока, катушки индуктивности или стробоскопического эффекта.
Основная задача — подсчитать количество полных N отклонений стрелки от 0 за период времени T. После того, как нашли данный параметр, можно определить частоту электротока ротора:

Затем по соотношению частоты электротока статора и ротора следует найти скольжение:

Косвенными методами при использовании электромагнитной катушки или стробоскопического эффекта определяют количество оборотов ротора К за период времени Т (сек). Затем вычисляется скольжение. Для этого используется формула:

При больших значениях скольжения для измерения применяются тахогенераторы или тахометры, установленные на валу двигателя.
Видео по теме
Как
известно, ротор асинхронного двигателя
вращается в ту же сторону, что и магнитное
поле со скоростью, несколько меньшей
скорости вращения поля, так как только
при этом условии
в обмотке ротора будут индуцироваться
ЭДС и токи и на ротор будет действовать
вращающий момент.
Обозначим
скорость вращения поля (синхронная
скорость) через ![]() а
а
скорость вращения ротора через 2![]() Тогда
Тогда
разность 3![]() называемая
называемая
скоростью скольжения, будет представлять
собой скорость ротора относительно
поля, а отношение скорости скольжения
к синхронной скорости, выраженное в
процентах, называют скольжением ![]() 4
4

Выразим
скольжение s через угловые
скорости вращения
поля и ротора ![]()
![]()
откуда
![]()
Полученные
выражения подставим в формулу скольжения
(5.7)
![]()
Выясним
влияние скольжения на мощность,
развиваемую двигателем.
Пусть ![]() мощность,
мощность,
потребляемая двигателем, ![]() мощность,
мощность,
развиваемая ротором при его вращении.
Тогда
![]()
![]() длина окружности ротора,
длина окружности ротора,
R — его радиус, ![]() и
и ![]() —
—
силы, действующие на ротор (соответственно
электромагнитная и механическая). Тогда
![]()
Взяв
отношение ![]() получим:
получим:
![]()
но ![]() (обе
(обе
силы электромагнитные и в установившемся
режиме вращения действие равно
противодействию), тогда
![]()
откуда
окончательно имеем:
![]()
Из
полученного соотношения следует, что
мощность ![]() развиваемая
развиваемая
ротором асинхронного двигателя, зависит
от скольжения 5.
Если
скольжение выражать в процентах, то ![]() от
от
мощности ![]() потребляемой
потребляемой
двигателем из сети, преобразуется в
механическую мощность, а
остальные ![]() мощности
мощности ![]() расходуются
расходуются
на покрытие потерь в двигателе, поэтому
для получения высокого КПД двигателя
скольжение необходимо делать возможно
меньшим.
На
практике у двигателей мощностью от 1 до
1000 кВА при номинальной нагрузке скольжение
составляет 3-6%, а при больших мощностях
— 1-3%. Так, при скоростях вращения магнитного
поля 3000, 1500 и 1000 об/мин скорости вращения
ротора обычно имеют соответственно
значения 2800,1410 и 930 об/мин.
37. Регулирование частоты вращения асинхронных двигателей
Частота вращения
асинхронного двигателя
n = n1 (1
– s) = (60f1/p)
(1-s) (85)
Из этого выражения
видно, что ее можно регулировать, изменяя
частоту f1 питающего
напряжения, число пар полюсов р и
 Рис.
Рис.
266. Схема переключения катушек обмотки
статора (одной фазы) для изменения числа
полюсов: а — при четырех полюсах; б —
при двух полюсах
скольжение s.
Последнее при заданных значениях момента
на валу Мвн и
частоты f1 можно
изменять путем включения в цепь обмотки
ротора реостата.
Регулирование
путем изменения числа пар полюсов. Этот
способ позволяет получить ступенчатое
изменение частоты вращения. Для этой
цели отдельные катушки 1, 2 и 3, 4, составляющие
одну фазу (рис. 266), переключаются так,
чтобы изменялось соответствующим
образом направление тока в них (например,
с последовательного согласного соединения
на встречное). При согласном включении
катушек (рис. 266, а) число полюсов равно
четырем, при встречном включении (рис.
266, б) — двум. Катушки двух других фаз,
сдвинутые в пространстве на 120°,
соединяются таким же образом. Такое же
уменьшение числа полюсов можно осуществить
при переключении катушек с последовательного
на параллельное соединение. При изменении
числа полюсов изменяется частота
вращения n1 магнитного
поля двигателя, а следовательно, и
частота вращения n его ротора. Если нужно
иметь три или четыре частоты вращения
n1,
то на статоре располагают еще одну
обмотку, при переключении которой можно
получить еще две частоты. Существуют
двигатели, которые обеспечивают изменение
частоты вращения n1 при
постоянном наибольшем моменте или при
приблизительно постоянной мощности
(рис. 267).
В
асинхронном двигателе число полюсов
ротора должно быть равно числу полюсов
статора. В короткозамкнутом роторе это
условие выполняется автоматически и
при переключении обмотки статора никаких
изменений в обмотке ротора выполнять
не требуется.
 Рис.
Рис.
267. Механические характеристики
двухскоростных асинхронных двигателей
с постоянным наибольшим моментом (а) и
постоянной мощностью (б)
 Рис.
Рис.
268. Механические характеристики
асинхронного двигателя при регулировании
частоты вращения путем включения
реостата в цепь обмотки ротора
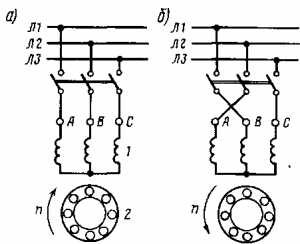 Рис.
Рис.
269. Схемы подключения асинхронного
двигателя к сети при изменении направления
его вращения
В
двигателе же с фазным ротором в этом
случае надо было бы изменять число
полюсов обмотки ротора, что сильно
усложнило бы его конструкцию, поэтому
такой способ регулирования частоты
вращения используется только в двигателях
с коротко-замкнутым ротором. Такие
двигатели имеют большие габаритные
размеры и массу по сравнению с двигателями
общего применения, а следовательно, и
большую стоимость. Кроме того, регулирование
осуществляется большими ступенями; при
частоте f1 =
50 Гц частота вращения поля n1 при
переключениях изменяется в отношении
3000:1500:1000:750.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Чтобы ответить на поставленный вопрос, надо определить сначала, с каким ускорением  будет двигаться брусок вдоль наклонной плоскости. Зная ускорение и пройденный путь
будет двигаться брусок вдоль наклонной плоскости. Зная ускорение и пройденный путь  можно будет найти скорость бруска в конце спуска, воспользовавшись уже выведенной нами формулой для равноускоренного движения
можно будет найти скорость бруска в конце спуска, воспользовавшись уже выведенной нами формулой для равноускоренного движения  (см. § 3. Ускорение. Прямолинейное равноускоренное движение).
(см. § 3. Ускорение. Прямолинейное равноускоренное движение).
На брусок, скользящий по наклонной плоскости, действуют три силы: сила тяжести  сила нормальной реакции
сила нормальной реакции  и сила трения скольжения
и сила трения скольжения  направленная вдоль наклонной плоскости вверх.
направленная вдоль наклонной плоскости вверх.
Чтобы найти ускорение тела, надо воспользоваться вторым законом Ньютона 
Выбирая оси координат так же, как в рассмотренном выше примере, получаем:

Кроме того, выполняется соотношение 
Из второго уравнения системы следует, что  Обратите внимание: для тела, находящегося на наклонной плоскости, сила нормальной реакции меньше силы тяжести. Отсюда следует, что
Обратите внимание: для тела, находящегося на наклонной плоскости, сила нормальной реакции меньше силы тяжести. Отсюда следует, что  Подставляя это соотношение в первое уравнение системы, находим, что ускорение бруска
Подставляя это соотношение в первое уравнение системы, находим, что ускорение бруска  Мы можем быть уверены в том, что это величина положительная, поскольку, согласно условию, брусок начал соскальзывать с наклонной плоскости — а это означает, в соответствии с предыдущим примером, что
Мы можем быть уверены в том, что это величина положительная, поскольку, согласно условию, брусок начал соскальзывать с наклонной плоскости — а это означает, в соответствии с предыдущим примером, что  то есть
то есть 
Подставляя найденное выражение для ускорения в формулу для скорости в конце спуска, получаем 
Механика.
2014

Одним из главных параметров асинхронного электродвигателя является скольжение. Это переменная величина. Меняться может, исходя из того, в каких режимах работает мотор, величины напряжения, валовой нагрузки.
В статье мы рассмотрим, что собой представляет это явление, как вычисляется, от каких условий зависит.
Что это такое
Принцип действия 3-х фазного электродвигателя (асинхронного) достаточно простой. К статорной обмотке подаётся питание. В результате образуется магнитный поток, смещённый на сто двадцать градусов в фазах. Общий поток, при этом, будет вращаться.
Обмотка представляет собой замкнутый контур, в котором возникает электродвижущая сила. Магнитный поток вращает ротор по направлению статорного потока. Крутящийся электромагнит стремится выровнять вращающие скорости статорного и роторного полей.
Значение, показывающее разницу быстроты вращения статорного и роторного полей и есть скольжение. Поскольку в асинхронном электродвигателе ротор всегда крутится медленней статора, значение, обычно, не превышает единицы. Измеряется в процентах либо единицах.
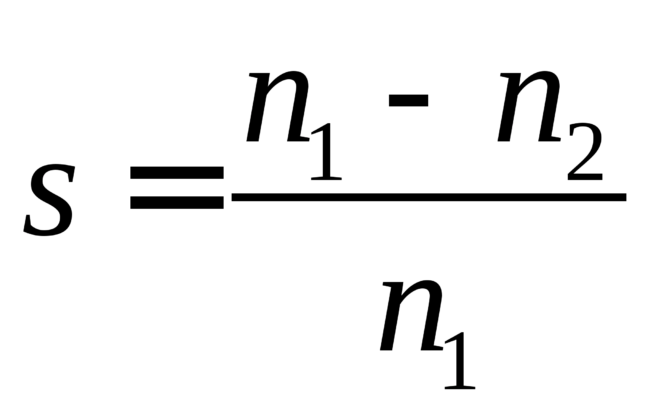
Вычисляется по следующей формуле:
Здесь n1 – скорость статора, n2 – скорость ротора.
Скольжение – один из основных параметров, отображающий корректность функционирования асинхронного электродвигателя.
Параметры в различных рабочих режимах
Когда электродвигатель обесточен, вращение не происходит, потому что статорное поле не пересекается с роторным полем. В этом случае величина равна двум или трём процентам, т.е. колеблется около нуля.
Если даже параметр холостого хода идеален, процентное значение нулю равняться не будет. Величина может быть и отрицательной, если двигатель функционирует в режиме генератора. В таком режиме (ротор вращается против статора) значение S будет меньше нуля.
При электромагнитном торможении, величина Sпревышает единицу с положительным знаком. Величина токовой частоты в роторных обмотках равняется токовой частоте сети исключительно при пусковом моменте.

Роторная токовая частота пропорциональна сопротивлению индукции, поэтому роторный ток зависим от скольжения асинхронного двигателя.
Момент вращения АД находится в зависимости от значения S, поскольку определяется величинами токового и магнитного потоков, угловым смещением ЭДС и роторным током.
Для подробного изучения параметров электродвигателя определяется зависимость, показанная на графике вверху.
При разных показателях асинхронном двигателе момент вращения можно корректировать при помощи сопротивления, включённого в цепи роторных обмоток.
Если ротор замкнут «накоротко», вращающий момент изменяется либо частотными преобразователями, либо применением двигателей с изменяющимися параметрами.

При нагрузочном номинале двигателя показатель скольжения находится между двумя и восемью процентами. При добавлении нагрузки скольжение ускоряется, потому что роторное поле начнёт больше отставать от статорного поля.
Ускорение неминуемо приведёт к росту роторного тока и момента вращения. Параллельно с этим возрастает сопротивление, что связано с активными роторными потерями, токовые показатели снижаются, в связи с чем, вращение растёт гораздо медленней скольжения.
При определённой скорости скольжения момент вращения достигнет максимума и начнёт замедляться. Максимальное значение является критическим и обозначается Sкр.
В технической документации указываются параметры асинхронного двигателя. По ним строится график, отвечающий на вопросы, связанные с работой асинхронного электрического двигателя, применяемого в качестве привода.
Критический максимум задаёт параметр мгновенного допустимого перегруза двигателя. Когда этот параметр превышается, происходит остановка двигателя (опрокидывание). Это аварийный режим.
Методы измерений
Есть несколько методов произвести замер скорости скольжения двигателя. Когда скорость существенно разнится с синхронным вращением, её определяют тахометром либо тахогенератором, подключённым к валу асинхронного двигателя.
Метод определения стробоскопом с лампой неонового свет применим при скольжении меньше пяти процентов. На двигательном валу мелом рисуют отметку или ставят стробоскоп.
Подают свет от лампы и считают количество оборотов за определённый промежуток времени и, используя формулы, определяют значение.
Ещё для замера скорости скольжения применяют катушку индуктивности. Оптимальным вариантом будет катушка контактора тока постоянной величины. К ней подключают милливольтметр и помещают в окончание роторного вала.
По количеству колебаний стрелки за определённый промежуток времени с помощью формулы вычисляют скорость вращения.
Кроме того, у двигателя с ротором фазы величину скольжения определяют амперметром (магнитоэлектрическим). Прибор подсоединяют к одной из роторных фаз и по количеству стрелочных колебаний, опять-таки применяя формулу, получают результат.
Мы выяснили, что такое скольжение двигателя, способы его определения. Свои вопросы оставляйте в комментариях.
Главная / Техническая информация / Механические характеристики асинхронного двигателя
Механические характеристики асинхронного двигателя — зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу).
Электромагнитный момент М, развиваемый асинхронным двигателем, можно определять двумя способами: через электромагнитную мощность Рэм и через полную механическую мощность двигателя Р2:
М=Р2‘/ω, (39)
где Р2 —полная механическая мощность, Вт; ω=2πn/60 — механическая угловая скорость вращения ротора, 1/с; n — частота вращения ротора, об/мин.
Скорость ω связана с синхронной ω1 соотношением

Подставляя выражение для ω и Р2‘ по уравнению (36) в уравнение (39), получаем
 (40)
(40)
Выражение для момента через электромагнитную мощность имеет вид
М=Рэм/ω1,
Значение Рэм находится по уравнению (35), после чего представляем
Таким образом мы получим тождественное выражение для момента. Поскольку независимой величиной является не ток, а приложенное напряжение, то для получения окончательного выражения момента подставим в (40) значение тока I2‘ по уравнению (32):
 (41)
(41)
где М — момент, Н∙м; ω1 — синхронная скорость, с-1; U1 — напряжение, В; r1, r2‘, x1, x2‘ —сопротивления, Ом; s — скольжение, отн. ед.
Если необходимо иметь значение момента во внесистемных единицах — в килограммах силы-метрах, то полученный по (41) результат следует разделить на 9,81.
При эксплуатации часто необходимо определять момент по известной механической мощности Р2 (кВт) и частоте вращения n (об/мин). В этом случае формула (39) имеет вид, Н/м,
 (42)
(42)
Отсюда мощность Р2 связана с моментом и частотой вращения соотношением
 (43)
(43)
где М — момент, Н∙м; n — частота вращения, об/мин.
Если момент выражен в килограммах силы-метрах, то формулы (42), (43) преобразуются к виду

Зависимость между моментом и скольжением (41) при постоянном напряжении U1 и частоте f1 сети называется механической характеристикой. Естественная механическая характеристика асинхронного двигателя приведена на рис. 20. Там же приведена механическая характеристика M=f (n), часто встречающаяся на практике и полученная из характеристики M = φ(s) пересчетом (s=0 соответствует синхронной частоте вращения n1, s =1-n=0 и т. д.).
Рис. 20. Естественная механическая характеристика асинхронного двигателя: a —M=f(s); б – n =f(М); А—генераторный режим; Б — режим двигателя; В — режим электромагнитного тормоза
Используя формулу (41), можно получить достаточно полное представление о механических характеристиках асинхронного двигателя. Обратим прежде всего внимание на то, что механический момент двигателя зависит от трех групп величин: во-первых, это величины, определяемые конструкцией двигателя, к их числу относятся r1 и r’2, x1, х’2; во-вторых, величины, характеризующие напряжение, подводимое к двигателю, — напряжение на его зажимах U и частота питающего напряжения f (так как ω1 = 2πf); наконец, последняя величина, определяющая момент, развиваемый двигателем, зависит от режима его работы — это скольжение s.
Рассмотрим физические явления, обусловливающие такую форму механической характеристики. При частоте вращения ротора, равной синхронной, проводники ротора движутся с той же скоростью, что и вращающееся магнитное поле. Поэтому ЭДС, а следовательно, и ток в роторе равны нулю. Поэтому равен нулю и вращающий момент двигателя. При уменьшении частоты вращения ротора ниже синхронной проводники обмотки ротора начинают пересекать магнитное поле машины, в результате чего в обмотке ротора наводится ЭДС, пропорциональная скольжению ротора [см. формулу (14)]. При малых скольжениях (в пределах от s=0 до s=sкр) ток ротора также изменяется почти пропорционально скольжению. К такому выводу можно прийти, рассматривая уравнение (25) или (32). Так, в уравнении (25) при малых значениях s можно пренебречь составляющей sx2 в знаменателе по сравнению со значением r2, а в (32) можно пренебречь всеми составляющими в знаменателе по сравнению со значением r’2/s.
Таким образом, ток ротора в этом диапазоне скольжений практически определяется величиной ЭДС ротора, деленной на постоянное активное сопротивление r2 [уравнение (25)].
Как видно из рис. 20, механическая характеристика в зоне малых скольжений s<sкр линейна. В этой же области скольжений находится и номинальное скольжение sном=0,01—0,1 (большие значения номинального скольжения относятся к двигателям мощностью до 1 кВт).
По мере увеличения скольжения увеличивается частота токов в роторе и возрастает влияние на характеристику индуктивного сопротивления ротора. Изменение тока, определяемое в зоне малых скольжений в основном активным сопротивлением [см. формулу (25)], замедляется, и при некотором скольжении, называемом критическим sкр, достигается максимальное значение момента. При дальнейшем увеличении скольжения (уменьшении частоты вращения ротора) момент будет уменьшаться.
Критическое скольжение находится по формуле
 (44)
(44)
где знак плюс соответствует двигательному режиму работы, а минус — генераторному (как следует из рис. 20, генераторный режим соответствует области отрицательных скольжений).
Поскольку для двигателей мощностью более 1 кВт практически всегда r1<<(х1 + х’2), то формулу для критического скольжения можно упростить:
 (44а)
(44а)
Теперь, подставляя значение s=sкр в формулу (41), получим выражение для максимального момента
 (45)
(45)
Взяв теперь отношение текущего значения момента к максимальному М/Мmax при условии r1≈0, получим
 (46)
(46)
Формула (46) оказывается весьма удобной, так как позволяет построить механическую характеристику двигателя M=f(s) при известных значениях максимального момента и соответствующего ему критического скольжения. Задавая текущее значение скольжения в диапазоне 0<s≤1, решают уравнение (46) относительно текущего момента М. Можно поступить иначе — строить механическую характеристику в относительных единицах, т. е. получать характеристику M/Mmax=f (s).
Относительный максимальный момент определяет его перегрузочную способность, т. е. способность двигателя кратковременно выдерживать нагрузки, большие номинальной. В электрических машинах перегрузочная способность обозначает kм и определяется как
kм = Mmax/Mном (47)
Важное значение имеет пусковой момент, который можно рассчитывать по общей формуле (41) при подстановке в нее s= 1:
 (48)
(48)
Относительное значение пускового момента kп определяет способность двигателя разгоняться до рабочей частоты вращения с полной нагрузкой на валу и определяется как
kп = Mп/Mном
В ряде случаев вместо (46) удобнее пользоваться формулой, в которой текущий момент двигателя отнесен не к максимальному, а к номинальному моменту. В этом случае
 (49)
(49)
где sкр, sном — значения критического и номинального скольжения двигателя; ρ=r1/r’2 (для двигателей серии 4А с высотой оси вращения 56—132 мм пользуются значением ρ≈1,32).
Если пренебречь величиной r1 (т. е. положить ρ=0), то из (49) следует
 (50)
(50)
Анализ выражения (41) для электромагнитного момента показывает, чт момент зависит от квадрата напряжения сети, что является недостатком асинхронных двигателей. Так, при снижении напряжения на 10 % момент уменьшается на 19%, а при снижении напряжения на 20 % уменьшение момента составляет 36%. На рис. 21 изображены механические характеристики двигателя при номинальном питающем напряжении (естественная характеристика) и при пониженном напряжении.
При уменьшении напряжения, питающего двигатель, который работает под нагрузкой, его вращающий момент снижается. В результате этого происходит снижение частоты вращения двигателя. Частота снижается (и соответственно увеличивается скольжение) до тех пор, пока вращающий момент двигателя не станет равным статическому моменту сопротивления Мс, обусловленному (приводом (соответствующие частоты вращения показаны точками на механических характеристиках рис. 21). При сильном уменьшении напряжения может случиться, что максимальный момент окажется меньше момента сопротивления Мс. В этом случае двигатель опрокидывается, т. е. его частота вращения уменьшается и в конце концов он останавливается. При заторможенном роторе по обмоткам двигателя протекают большие токи, и во избежание аварии сам двигатель должен быть отключен от сети (эти функции выполняет тепловая защита).
Рис. 21. Механические характеристики асинхронного двигателя при различных значениях питающего напряжения