1.1. Механические гармонические колебания
1.2. Зависимость амплитуды и начальной фазы колебаний от начальных условий
1.3. Свободные гармонические колебания в LC-контуре
1.4. Графическое изображение гармонических колебаний. Векторная диаграмма
1. В качестве механической колебательной системы, на примере которой мы будем рассматривать колебания, выбираем пружинный маятник: маленькое тело (материальная точка) массой m подвешено на пружине с жесткостью k (Рисунок 2).
Ненагруженная пружина имела длину l0. Когда подвесили тело, пружина удлинилась на ∆l. Возникшая упругая сила уравновесила силу тяжести ![]() . Это соотношение позволяет определить положение равновесия пружинного маятника. Если теперь тело сместить относительно положения равновесия на расстояние х, то на тело будет действовать сила упругости и сила тяжести.
. Это соотношение позволяет определить положение равновесия пружинного маятника. Если теперь тело сместить относительно положения равновесия на расстояние х, то на тело будет действовать сила упругости и сила тяжести.
Равнодействующая этих сил равна:
![]() .
.
Знак минус означает, что направление силы Fупр. и направление смещения х противоположны. Fупр. — сила упругости, возникающая при смещении тела относительно положения равновесия за счет сжатия или растяжения пружины (в зависимости от того, в какую сторону от положения равновесия отклонено тело). Качественно на Рисунке 1.1 виден результат действия упругой силы ( чем больше смещение, тем больше Fупр.).
Рисунок 1.1 – Положения пружинного маятника за время одного периода колебаний.
Если система совершает колебания под действием сил, развивающихся в самой колебательной системе без внешних воздействий и без учета сил сопротивления, то колебания называются незатухающими собственными колебаниями.
Отсутствие затухания колебаний характерно для идеальной колебательной системы, которая является физической моделью реальных физических процессов.
2. Дифференциальное уравнение, соответствующее колебаниям пружинного маятника, можно получить из закона его движения, которым является 2-й закон Ньютона ma = F.
Учитывая, что ускорение есть вторая производная от смещения по времени  , а сила, действующая на тело, есть сила упругости, определяемая для малых смещений тела от положения равновесия по закону Гука, как
, а сила, действующая на тело, есть сила упругости, определяемая для малых смещений тела от положения равновесия по закону Гука, как ![]() , получим
, получим  или
или  .
.
Это дифференциальное уравнение второго порядка для незатухающих колебаний. Основной его отличительной особенностью является тот факт, что вторая производная от смещения по времени (т.е. ускорение) пропорциональна смещению. Дифференциальное уравнение, в которое величина х входит в нулевой или первой степени, называется линейным дифференциальным уравнением. В дальнейшем мы покажем, что подобного рода уравнения характерны для незатухающих колебаний в любой идеальной колебательной системе.
Перенесем все члены уравнения в левую часть и приведем дифференциальное уравнение к виду:
Величина ![]() , обозначим ее
, обозначим ее ![]() , получим
, получим
3. Решением дифференциального уравнения такого вида являются уравнения:
![]() или
или ![]()
Эти решения называются уравнениями колебаний, они позволяют вычислить смещение х пружинного маятника в любой момент времени.
Колебания, при которых характеризующие их физические величины изменяются по закону синуса или косинуса, называются гармоническими.
Отличие аргументов функций синуса и косинуса составляет ![]() , т.е.
, т.е. ![]() . В дальнейшем чаще всего мы будем использовать решение дифференциального уравнения в виде
. В дальнейшем чаще всего мы будем использовать решение дифференциального уравнения в виде ![]() .
.
4. В уравнении колебаний:
А – амплитуда смещения – максимальное отклонение маятника от положения равновесия;
х – смещение маятника, т.е. отклонение колеблющейся точки (тела) от положения равновесия в момент времени t;
![]() – фаза колебаний – величина, определяющая положение колеблющейся точки в любой момент времени t;
– фаза колебаний – величина, определяющая положение колеблющейся точки в любой момент времени t;
α – начальная фаза определяет положение маятника в начальный момент времени (t = 0).
Периодом T называется наименьший интервал времени, за который система возвращается в исходное положение. За период колебаний система совершает одно полное колебание.
Частотой периодических колебаний называется величина ![]() , равная числу колебаний, совершаемых за единицу времени.
, равная числу колебаний, совершаемых за единицу времени.
Циклической или круговой частотой периодических колебаний называется величина ![]() , равная числу колебаний, совершаемых за
, равная числу колебаний, совершаемых за ![]() единиц времени.
единиц времени.
Для пружинного маятника частота и период собственных колебаний в зависимости от параметров системы имеют вид:
 ,
,  .
.
5. Зная уравнение смещения пружинного маятника, получим подобные уравнения для других физических величин. Найдем скорость, ускорение, энергию колебаний, если уравнение смещения пружинного маятника задано в виде ![]() .
.
Скорость колебаний маятника есть первая производная по времени от смещения:
![]() .
.
Величина Аω0 называется амплитудой скорости. Амплитуда – величина положительная (по определению).
Ускорение маятника:
 .
.
Величина Аω02 – амплитуда ускорения. И смещение, и ускорение маятника изменяются по закону косинуса, но отличаются, кроме амплитуды, еще и знаком. Направление ускорения совпадает с направлением упругой силы.
6. Так как собственные колебания в идеальной системе происходят без внешних воздействий, то колебательная система является замкнутой и для нее выполняется закон сохранения механической энергии.
Полная механическая энергия пружинного маятника равна: ![]() .
.
Потенциальная энергия материальной точки, гармонически колеблющейся под действием упругой силы, равна:
![]()
Кинетическая энергия пружинного маятника равна
Полная энергия колебаний пружинного маятника равна
![]()
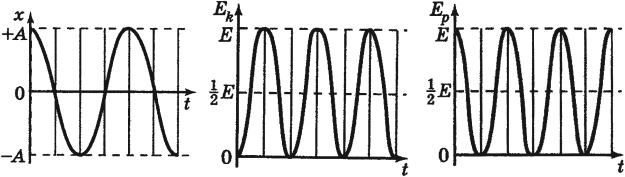
Частота изменений кинетической и потенциальной энергии в 2 раза больше частоты изменения смещения, скорости и ускорения. Соответственно период изменения этих видов энергии  .
.
Графики физических величин в зависимости от времени представлены на Рисунке 1.2 в пределах двух периодов колебаний (начальная фаза взята равной нулю α = 0).
Рисунок 1.2 – Графики смещения (х), скорости (v), ускорения (а) в зависимости от времени t
1.2. Зависимость амплитуды и начальной фазы колебаний от начальных условий
Решения дифференциального уравнения колебаний определены с точностью до постоянной величины, поэтому таких решений бесчисленное множество. Выбор решения для данной конкретной колебательной системы можно сделать, если задать ее поведение в начальный момент времени, то есть начальные условия. Например, если просто отклонить маятник, растянув пружину, а затем спокойно отпустить его, или отклонить, а затем подтолкнуть маятник, то движения маятника будут различными. Рассмотрим зависимость параметров колебательной системы от начальных условий.
Пусть при t = 0 смещение системы от положения равновесия равно х0, а начальная скорость v0. Гармоническое колебание описывается уравнением ![]() .
.
При t = 0 имеем два уравнения:
![]() ,
, ![]() .
.
Возведя в квадрат оба уравнения и сложив их, получим уравнение для амплитуды:
 .
.
Поделив одно уравнение на другое, получим соотношение для начальной фазы:
 .
.
Таким образом, и амплитуда, и начальная фаза колебаний зависят от начальных условий колебательной системы.
1.3. Свободные гармонические колебания в LC-контуре
1. Электромагнитный контур состоит из плоского конденсатора емкостью С и катушки индуктивности (соленоида) с индуктивностью L. Такой контур называется идеальным контуром с распределенными параметрами. Конденсатор зарядили, на одной пластине заряд +q, на другой (–q). Рассмотрим процессы в LC – контуре за время T, называемое периодом колебаний.
Момент времени t = 0. Конденсатор заряжен, ключ «К» разомкнут, ток в контуре не идет: I = 0,  ,
, ![]()
![]() Ключ замкнут, по цепи идет ток разрядки до тех пор, пока не выровняются потенциалы обкладок конденсатора. При
Ключ замкнут, по цепи идет ток разрядки до тех пор, пока не выровняются потенциалы обкладок конденсатора. При ![]()
![]()
![]()
![]()
![]() Когда конденсатор разрядится, ток разрядки прекратится. Магнитное поле в катушке индуктивности, не поддерживаемое током, начнет уменьшаться. Уменьшение магнитного поля вызовет уменьшение магнитного потока сквозь площадь катушки, возникнет ЭДС индукции. По цепи контура пойдет индукционный ток того же направления, что и ток разрядки (правило Ленца). Это приведет к перезарядке конденсатора. При
Когда конденсатор разрядится, ток разрядки прекратится. Магнитное поле в катушке индуктивности, не поддерживаемое током, начнет уменьшаться. Уменьшение магнитного поля вызовет уменьшение магнитного потока сквозь площадь катушки, возникнет ЭДС индукции. По цепи контура пойдет индукционный ток того же направления, что и ток разрядки (правило Ленца). Это приведет к перезарядке конденсатора. При ![]()
![]()
![]()
![]()
![]() Направление тока разрядки в контуре изменится. Ток разрядки будет идти по цепи до выравнивания потенциалов на обкладках конденсатора.
Направление тока разрядки в контуре изменится. Ток разрядки будет идти по цепи до выравнивания потенциалов на обкладках конденсатора.
При ![]()
![]()
![]()
![]()
При t = T система вернется в исходное положение.
В рассмотренном LC – контуре происходит превращение энергии из одного вида в другой и обратно, полная энергия контура — величина постоянная ![]() .
.
Периодические изменения вектора напряженности Е электрического поля и вектора магнитной индукции В магнитного поля в закрытом колебательном LC – контуре называется электромагнитными колебаниями.
2. Используем 2-й закон Кирхгофа для получения дифференциального уравнения электромагнитных колебаний.
Для любого замкнутого контура алгебраическая сумма падений напряжений на всех его участках равна алгебраической сумме ЭДС, действующих в этом контуре (2-ой закон Кирхгофа).
Падение напряжения на обкладках конденсатора в LC – контуре равно
![]() где q – величина заряда на обкладках, С – емкость конденсатора. ЭДС индукции, возникающая в катушке индуктивности при изменении тока в ней, определяется формулой:
где q – величина заряда на обкладках, С – емкость конденсатора. ЭДС индукции, возникающая в катушке индуктивности при изменении тока в ней, определяется формулой:![]() (закон Фарадея для самоиндукции).
(закон Фарадея для самоиндукции).
Второй закон Кирхгофа для LC – контура имеет вид:
![]() или
или ![]() .
.
По определению сила тока равна первой производной по времени от заряда ![]() , тогда
, тогда  .
.
Преобразуем уравнение 2-ого закона Кирхгофа, получим
 Обозначим
Обозначим ![]() , получим окончательно уравнение вида:
, получим окончательно уравнение вида: 
Это линейное дифференциальное уравнение второго порядка, решениями которого являются уравнения:
![]() или
или ![]() .
.
И дифференциальное уравнение для электромагнитных колебаний, и его решения подобны тем, которые получены для механической системы (пружинного маятника).
Величины, входящие в уравнения электромагнитных колебаний, имеют следующий смысл:
q0 – амплитуда заряда – максимальный заряд конденсатора;
q – величина заряда на обкладках конденсатора в момент времени t;
![]() – фаза колебаний – величина, определяющая заряд конденсатора в любой момент времени t;
– фаза колебаний – величина, определяющая заряд конденсатора в любой момент времени t;
α – начальная фаза определяет заряд конденсатора в начальный момент времени (t = 0).
Циклической частотой периодических колебаний в LC – контуре является величина  .
.
Период колебаний равен ![]() (формула Томсона).
(формула Томсона).
Определим зависимость силы тока, ЭДС и энергии колебаний от времени в LC – контуре. Уравнение изменения заряда на обкладках конденсатора возьмем в виде: ![]()
Сила тока в контуре определяется соотношением:
![]() .
.
Величину ![]() называют амплитудой силы тока.
называют амплитудой силы тока.
Уравнение для ЭДС имеет вид:
![]() .
.
Величина ![]() – амплитуда ЭДС.
– амплитуда ЭДС.
Электрическая и магнитная энергия изменяется согласно уравнениям:

Полная энергия колебаний в LC — контуре  не зависит от времени (закон сохранения энергии).
не зависит от времени (закон сохранения энергии).
Графики зависимостей от времени t физических величин, характеризующих электромагнитных колебаний в LC – контуре, аналогичны графикам для механических колебаний (см. Рисунок 1.2).
Если заряд на обкладках изменяется по закону ![]() , т.е. начальная фаза α = 0, то его график такой же как график смещения.
, т.е. начальная фаза α = 0, то его график такой же как график смещения.
Напряжение между обкладками конденсатора![]() изменяется по тому же закону, что и заряд конденсатора, только амплитуда напряжения будет другой
изменяется по тому же закону, что и заряд конденсатора, только амплитуда напряжения будет другой ![]() .
.
Изменение силы тока аналогично изменению скорости тела при механических незатухающих колебаниях. Wэл. изменяется как Wпот., а Wмагн. — как Wкин..
1.4. Графическое изображение гармонических колебаний. Векторная диаграмма
Решение многих вопросов в теории колебаний значительно упрощается, если использовать графический метод изображения гармонических колебаний в виде векторов на плоскости. Такое изображение называется векторной диаграммой колебаний (Рисунок 1.3).
Рисунок 1.3 – Векторная диаграмма гармонического колебаний ![]() .
.
Последовательность построения векторной диаграммы колебания, заданного уравнением ![]() , такова:
, такова:
- Выберем на плоскости ось Х, на ней возьмем точку О – начало координат.
- Под углом α, равном начальной фазе колебаний, к оси Х, из точки О откладываем вектор, равный по длине амплитуде А колебаний.
- Вектор А равномерно вращаем вокруг точки О против часовой стрелки с угловой скоростью, равной циклической частоте
 колебаний.
колебаний.
Тогда в любой момент времени угол вектора А с осью Х равен ![]() . Соответственно проекция конца вектора А на ось Х будет совершать колебания по закону
. Соответственно проекция конца вектора А на ось Х будет совершать колебания по закону ![]() , а сама проекция вектора А в любой момент времени будет равна смещению х колеблющейся точки от положения равновесия. Если начальная фаза колебаний
, а сама проекция вектора А в любой момент времени будет равна смещению х колеблющейся точки от положения равновесия. Если начальная фаза колебаний ![]() , то в начальный момент времени вектор А откладываем из точки О вдоль направления оси Х.
, то в начальный момент времени вектор А откладываем из точки О вдоль направления оси Х.
Механические колебания.
-
Гармонические колебания.
-
Уравнение гармонических колебаний.
-
Пружинный маятник.
-
Математический маятник.
-
Свободные и вынужденные колебания.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ : гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания — это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания — это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия — это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание. Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела — это величина его наибольшего отклонения от положения равновесия.
Период колебаний  — это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
— это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний  — это величина, обратная периоду:
— это величина, обратная периоду:  . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
. Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
к оглавлению ▴
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой  . Положению равновесия отвечает значение
. Положению равновесия отвечает значение  . Основная задача механики в данном случае состоит в нахождении функции
. Основная задача механики в данном случае состоит в нахождении функции ") , дающей координату тела в любой момент времени.
, дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них — синус и косинус — являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на  , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
, можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
Гармонические колебания — это колебания, при которых координата зависит от времени по гармоническому закону:
") (1)
(1)
Выясним смысл входящих в эту формулу величин.
Положительная величина  является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
Аргумент косинуса  называется фазой колебаний. Величина
называется фазой колебаний. Величина  , равная значению фазы при
, равная значению фазы при  , называется начальной фазой. Начальная фаза отвечает начальной координате тела:
, называется начальной фазой. Начальная фаза отвечает начальной координате тела:  .
.
Величина называется  циклической частотой. Найдём её связь с периодом колебаний и частотой
циклической частотой. Найдём её связь с периодом колебаний и частотой  . Одному полному колебанию отвечает приращение фазы, равное
. Одному полному колебанию отвечает приращение фазы, равное  радиан:
радиан:  , откуда
, откуда
 (2)
(2)
 (3)
(3)
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1):
, x=Acos(2 pi nu t + alpha)") .
.
График функции (1), выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1.
 |
| Рис. 1. График гармонических колебаний |
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину  и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае  , поэтому можно положить
, поэтому можно положить  . Мы получаем закон косинуса:
. Мы получаем закон косинуса:
 .
.
График гармонических колебаний в этом случае представлен на рис. 2.
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае  , так что можно положить
, так что можно положить  . Получаем закон синуса:
. Получаем закон синуса:
 .
.
График колебаний представлен на рис. 3.
 |
| Рис. 3. Закон синуса |
к оглавлению ▴
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1). Дифференцируем это равенство:
") . (4)
. (4)
Теперь дифференцируем полученное равенство (4):
") . (5)
. (5)
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем  :
:
 . (6)
. (6)
Это соотношение называется уравнением гармонических колебаний. Его можно переписать и в таком виде:
 . (7)
. (7)
C математической точки зрения уравнение (7) является дифференциальным уравнением. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
-решением уравнения (7) является всякая функция вида (1) с произвольными  ;
;
-никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6), (7) описывают гармонические колебания с циклической частотой  и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
к оглавлению ▴
Пружинный маятник.
Пружинный маятник — это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу  , жёсткость пружины равна
, жёсткость пружины равна  .
.
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости  со стороны пружины. Второй закон Ньютона для груза в проекции на ось
со стороны пружины. Второй закон Ньютона для груза в проекции на ось  имеет вид:
имеет вид:
 . (8)
. (8)
Если  (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и
(груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и  . Наоборот, если
. Наоборот, если  , то
, то  . Знаки и
. Знаки и  всё время противоположны, поэтому закон Гука можно записать так:
всё время противоположны, поэтому закон Гука можно записать так:

Тогда соотношение (8) принимает вид:

или
 .
.
Мы получили уравнение гармонических колебаний вида (6), в котором
 .
.
Циклическая частота колебаний пружинного маятника, таким образом, равна:
 . (9)
. (9)
Отсюда и из соотношения  находим период горизонтальных колебаний пружинного маятника:
находим период горизонтальных колебаний пружинного маятника:
 . (10)
. (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10).
к оглавлению ▴
Математический маятник.
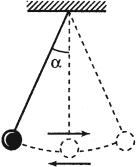
Математический маятник — это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна  . Сопротивлением воздуха пренебрегаем.
. Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
 ,
,
и спроектируем его на ось :
 .
.
Если маятник занимает положение как на рисунке (т. е. ), то:
 .
.
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
 .
.
Итак, при любом положении маятника имеем:
 . (11)
. (11)
Когда маятник покоится в положении равновесия, выполнено равенство  . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство
. При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство  . Воспользуемся им в формуле (11):
. Воспользуемся им в формуле (11):
 ,
,
или
 .
.
Это — уравнение гармонических колебаний вида (6), в котором
 .
.
Следовательно, циклическая частота колебаний математического маятника равна:
 . (12)
. (12)
Отсюда период колебаний математического маятника:
 . (13)
. (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
к оглавлению ▴
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6).
 |
| Рис. 6. Затухающие колебания |
Вынужденные колебания — это колебания, совершаемые системой под воздействием внешней силы ") , периодически изменяющейся во времени (так называемой вынуждающей силы).
, периодически изменяющейся во времени (так называемой вынуждающей силы).
Предположим, что собственная частота колебаний системы равна  , а вынуждающая сила зависит от времени по гармоническому закону:
, а вынуждающая сила зависит от времени по гармоническому закону:
=F_{0}cos omega t") .
.
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7.
 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты  наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:
наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:  , и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,
, и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,  , а амплитуда колебаний возрастает до бесконечности при
, а амплитуда колебаний возрастает до бесконечности при  .
.
Благодарим за то, что пользуйтесь нашими материалами.
Информация на странице «Механические колебания.» подготовлена нашими редакторами специально, чтобы помочь вам в освоении предмета и подготовке к экзаменам.
Чтобы успешно сдать нужные и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими статьями из разделов нашего сайта.
Публикация обновлена:
08.05.2023
В соответствии с этой
классификацией применительно к стержневым
системам различают продольные,
поперечные и крутильные
колебания.
При продольных
колебаниях перемещение всех точек
упругого стержня направлены вдоль оси
стержня. При этом имеет место деформация
удлинения или укорочения стержня, т.е.
продольные колебания можно назвать
колебаниями растяжения-сжатия.
Поперчными
колебаниями называются колебания
изгиба, при которых прогибы направлены
перпендикулярно к оси стержня. Напряженное
состояние при поперечных колебаниях,
очевидно, будет таким же, как и при
статическом изгибе балки. Поэтому
поперечные колебания иначе можно назвать
изгибными.
Крутильными
называются колебания стержней,
сопровождаемые переменной деформацией
кручения. Эти колебания возникают в
различного рода валах, работающих на
кручение.
Кроме перечисленных
видов колебаний существуют колебания
смешанного типа, при которых одновременно
возникают деформации изгиба и кручения,
так называемые изгибно-крутильные
колебания.
16.2. Собственные колебания системы с одной степенью свободы
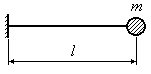
Рассмотрим балку с
одной сосредоточенной массой
![]() ,
,
прикрепленной к какой-либо точке на
расстоянии
![]()
от левой опоры (Рис.16.4,а).
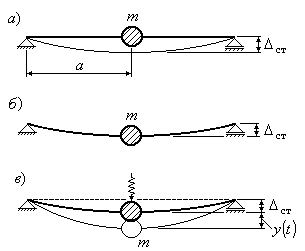
Рис.16.4
Под весом первоначально
приложенного груза
![]()
балка прогнется на величину
![]()
и примет состояние
(Рис.16.4,б), которое назовем равновесным.
Относительно этого состояния в дальнейшем
балка будет совершать колебания.
Предположим, что
масса балки по сравнению с массой
![]()
мала, и ею можно пренебречь. Ось изогнутой
оси балки определяется в этом случае
величиной отклонения массы, т.е. только
одним параметром. Поэтому такую балку
называют системой с одной степенью
свободы.
Если массу отклонить от равновесного
состояния (Рис.16.4,в) и отпустить, то балка
вместе с массой начнет колебаться возле
равновесного состояния. Вследствие сил
сопротивления колебания булут постепенно
затухать, и через некоторое время балка
вновь придет в свое исходное равеновесное
состояние (Рис.16.4,б).
Получим уравнение
колебаний заданной системы. Отклонение
массы от состояния равновесия
![]()
происходит за счет сил инерции. Введем
единичное перемещение
![]()
от силы инерции, равной единице. Составим
соотношение:
![]()
(16.1)
Учитывая, что сила инерции равна
![]() ,
,
из
соотношения (16.1) найдем величину
отклонения массы
![]()
от равновесного состояния:
![]() .
.
(16.2)
Так как
![]() ,
,
перепишем уравнение (16.2) в виде:
![]() .
.
(16.3)
Обозначим
![]() ,
,
где
![]()
круговая частота собственных колебаний,
и подставляя в (16.3), окончательно получим
дифференциальное уравнение, описывающее
рассматриваемый колебательный процесс:
![]() .
.
(16.4)
Уравнение (16.4) представляет собой
линейное дифференциальное уравнение
второго порядка без правой части. Решение
такого уравнения будем искать в виде:
![]() ,
,
(16.5)
где
![]()
и
![]()
постоянные интегрирования.
Уравнение (16.5) можно
привести к другому виду. Для этого введем
обозначения
![]() ;
;
![]()
и поставим в уравнение (16.5). Получим:
![]() ,
,
(16.6)
где
![]()
амплитуда колебаний;
![]()
начальная фаза колебаний, оределяемая
при
![]() :
:
![]() .
.
Определим амплитуду
кролебаний
![]()
и начальную фазу
![]() .
.
Для этого запишем выражение для скорости
движущейся массы:
![]() .
.
(16.7)
Воспользуемся
граничными условиями для определения
постоянных
![]()
и
![]() .
.
Пусть при
![]()
![]() ;
;
![]() .
.
Тогда из уравнений (16.1) и (16.7) найдем:
![]() ;
;
![]() .
.
Решая полученную
систему уравнений относительно
![]()
и
![]() ,
,
получим:
 ;
;
![]() .
.
График изменения перемещения во времени
показан на рис.16.5.
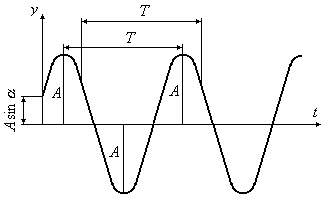
Рис.16.5
Наибольшее отклонение
от равновесного состояния в ту или
другую сторону будет тогда, когда
![]()
равен единице. Как видно из уравнения
(16.6), это отклонение будет равно постоянной
![]() .
.
Таким образом, величина
![]()
представляет собой амплитуду колебаний.
Время
![]() ,
,
за которое совершается один полный цикл
колебаний, называется периодом колебаний.
Через каждые
![]()
секунд отклонение
![]()
приобретает прежнее значение.
Из уравнения (16.6) имеем:
![]() .
.
Следовательно,
![]() ,
,
откуда
круговая частота собственных колебаний,
представляющеая собой число колебаний
за
![]() секунд,
секунд,
равна:
![]() .
.
Круговую частоту
собственных колебаний в соответствии
с принятым выше обозначением
![]()
можно определить по формуле:
![]() ,
,
(16.8)
где
![]()
статический прогиб того сечения, в
котором находится колеблющаяся
сосредоточенная масса
![]() ,
,
вызванный действием соответствующей
статически приложенной силы тяжести
![]() .
.
В теоретической
механике частоту собственных колебаний
определяют с помощью жесткости системы.
Жесткостью
системы при
колебаниях называется сила, которую
нужно приложить в том сечении, где
находится колеблющаяся масса, чтобы
вызвать единичное перемещение этого
сечения.
Если
![]()
единичное перемещение, то величина ей
обратная
![]()
является жесткостью системы при
колебаниях.
Преобразуя выражение (16.8), получим:
![]() .
.
(16.9)
Формула (16.8) для круговой частоты
собственных колебаний является
классической формулой теоретической
механики.
При необходимости
учета собственного веса тела при
определении круговой частоты собственных
колебаний в сечении, в котором приложена
колеблющаяся сосредоточенная масса,
следует дополнительно приложить
приведенную массу тела
![]() ,
,
где
![]()
распределенная масса по длине тела;
![]()
коэффициент приведения массы (веса),
описанный в предыдущей теме, в которой
коэффициент
![]()
использовался при вычислении динамического
коэффициента при ударе. Тогда формула
(16.8) для определения круговой частоты
собственных колебаний преобразуется
к виду:
![]() .
.
(16.10)
В ряде случаев для сокращения времени
вычислений полезно запомнить значение
жесткости системы для некоторых наиболее
распространенных случаев нагружения
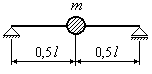
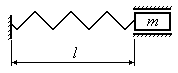
стержней, балок, валов и пружин. В таблице
16.1 приведены для некоторых их таких
случаев нагружения выражения для
жесткости и частоты собственных
колебаний.
Таблица 16.1
|
Вид системы |
Жесткость системы |
Частота |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
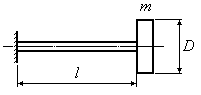
Для скручиваемого
вала при вычислении круговой частоты
собственный колебаний
![]()
следует использовать момент инерции
диска относительно оси стержня,
перпендикулярной к плоскости диска
![]() .
.
Вычислим период и круговую частоту
собственных колебаний для системы с
двумя вращающимися дисками (Рис.16.6).
Если закрутить диски один относительно
другого, а затем мгновенно снять
приложенные внешние моменты, то диски
начнут совершать крутильные колебания
навстерчу друг другу. При этом некоторое
промежуточное сечение вала будет
оставаться неподвижным.
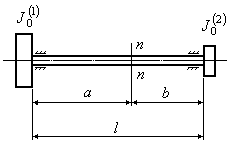
Рис.16.6
Положение этого так
называемого узлового сечения
![]()
можно найти из условия равенства частот
колебаний обоих дисков с примыкающими
к ним участками вала длиной
![]()
и
![]() ,
,
для которых применимы формулы:
 ,
,
откуда
 ,
,
где
![]()
и
![]()
моменты инерции соответственно первого
и второго дисков.
Используя последнее
соотношение, а также, имея в виду, что
![]() ,
,
находим:
 ;
;
 .
.
Тогда период и частота крутильных
колебаний системы будут следующими:
 ;
;
 .
.
Рассмотрим примеры вычисления круговой
частоты собственных колебаний.
Пример 16.1. Определить
частоту собственных колебаний груза
весом
![]() Н,
Н,
подвешенного к концу стального стержня
длиной
![]() м
м
и площадью поперечного сечения
![]() см2,
см2,
если модуль упругости материала
![]() МПа.
МПа.
Решение:
-
Вычислим удлинение стержня:
![]() м.
м.
-
Определяем частоту собственных колебаний
по формуле:
![]() с
с
–1.
Пример 16.2. Найти
период собственных колебаний кручения
стального вала диаметром
![]() см
см
и длиной
![]() м,
м,
один конец которого защемлен, а на втором
насажен шкив с моментом инерции
![]() Нмс2.
Нмс2.
Решение:
1. Определяем круговую частоту собственных
крутильных колебаний, воспользовавшись
формулой из таблицы 16.1:
![]() с
с
–1.
2. Находим период собственных крутильных
колебаний вала:
![]() с.
с.
Пример 16.3. Стальная
цилиндрическая пружина, имеющая
![]()
витков при среднем диаметре витка
![]() см
см
диаметре проволоки
![]() мм,
мм,
растянута грузом
![]() Н.
Н.
Определить частоту собственных колебаний
груза.
Решение:
-
Вычисляем жесткость пружины:
![]() Н/м.
Н/м.
-
Определяем частоту собственных
колебаний:
![]() с
с
–1.
Пример 16.4. Двутавровая
балка №27 длиной
![]() м,
м,
шарнирно опертая по концам, несет
посредине пролета груз
![]() кН.
кН.
Момент инерции двутавра
![]() см4,
см4,
вес одного погонного метра
![]() Н/м.
Н/м.
Коэффициент приведения веса принять
![]() .
.
Определить частоту собственных колебаний
без учета и с учетом массы балки.
Решение:
-
Определяем жесткость балки:
![]() Н/м.
Н/м.
2. Находим частоту собственных колебаний
без учета собственного веса балки:
![]() с
с
–1.
3. Определяем частоту собственных
колебаний с учетом собственного веса
балки:
 сек
сек
–1.
Пример 16.5. Определить
частоту собственных колебаний для
двутавровой балки №27 с моментом инерции
![]() см4,
см4,
если груз
![]() кН
кН
приложен на расстоянии
![]() м
м
от левой опоры (Рис.16.7,а). Длина балки
![]() м.
м.
Собственным
весом балки пренебречь.
Решение:
1. Найдем
статическое перемещение (прогиб) сечения
С, в котором приложен груз
![]() .
.
Для этого сначала построим эпюру грузовых
моментов
![]()
(Рис.16.7,б). Изгибающий момент в сечении
С определим по формуле:
![]() кНм.
кНм.
Затем
выберем единичное состояние балки
(Рис.16.7,в), приложим в сечении С единичную
сосредоточенную силу
![]()
и построим эпюру единичных изгибающих
моментов (Рис.16.7,г). Изгибающий момент
в сечении С найдем по формуле:
![]() .
.
Используя формулу треугольников, найдем
статический прогиб в сечении С:
![]() м.
м.
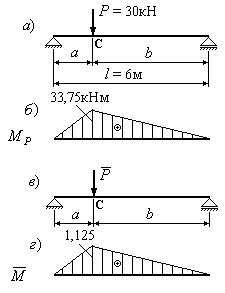
Рис.16.7
2. Определяем частоту собственных
колебаний балки:
![]() с
с
–1.
16.3.
Учет сил внутреннего сопротивления при
определении частоты собственных
колебаний
Приведенное выше решение для определения
частоты собственных колебания является
приближенным, так как в нем не учтены
силы сопротивления, например, сопротивление
воздуха, силы трения в шарнирах, силы
внутреннего сопротивления.
Силы сопротивления воздуха при скоростях
колебаний, которые наблюдаются в балках,
невелики и поэтому их можно не учитывать.
Силы трения в шарнирах могут быть
устранены или сведены до минимума за
счет улучшения конструкции шарнирных
опор или их смазки.
Основными
являются силы
внутреннего неупругого сопротивления,
котрорые зависят от материала балки и
ряда других факторов. Эти силы устранить
невозможно.
По одной
из наиболее распространенных гипотез
учета затуханий, предложенных Фойгтом
[5],
материал рассматривается как вязко-упругое
тело, в котором возникающие напряжения
![]()
зависят не только от величины деформации
![]() ,
,
но и от скорости изменения деформации
во времени:
![]() ,
,
(16.11)
где
![]()
коэффициент вязкого трения.
В соответствии
с гипотезой Фойгта эффект сил внутреннего
сопротивления при колебаниях
рассматриваемой балки заменяется
действием внешней силы
![]() ,
,
приложенной в точке закрепления массы.
Здесь
![]()
коэффициент пропорциональности между
силой и скоростью.
Величина отклонения массы от равновесного
состояния с учетом сил внутреннего
сопротивления имеет вид:
![]() ,
,
откуда
![]() ,
,
(16.12)
где
![]() ;
;
![]() .
.
Выражение (16.12) представляет собой
дифференциальное уравнение собственных
колебаний системы с одной степенью
свободы с учетом неупругих сил
сопротивления. Интеграл уравнения
(16.12) можно записать в виде:
![]() ,
,
(16.13)
где
![]() .
.
(16.14)
Из графика колебаний (Рис.16.8), построенного
по выражению (16.13), хорошо видно, что
собственные колебания быстро затухают.
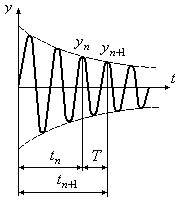
Рис.16.8
Выражение (16.14) дает
значение частоты собственных колебаний
с учетом сил сопротивления. Величина
![]()
обычно мала по сравнению с
![]() ,
,
поэтому
![]()
и
![]() ,
,
как правило, мало отличаются друг от
друга:
![]() .
.
Чтобы оценить скорость затухания
колебательного процесса, составим
отношение двух отклонений массы,
измеренных через один период (Рис.16.8):
![]() ,
,
откуда
![]()
.
(16.15)
Величину
![]()
называют логарифмическим
декрементом колебаний,
он характеризует скорость затухания
собственных колебаний.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Механические колебания и волны

Механические колебания – периодически повторяющееся перемещение материальной точки, при котором она движется по какой-либо траектории поочередно в двух противоположных направлениях относительно положения устойчивого равновесия.
Отличительными признаками колебательного движения являются:
- повторяемость движения;
- возвратность движения.
Для существования механических колебаний необходимо:
- наличие возвращающей силы – силы, стремящейся вернуть тело в положение равновесия (при малых смещениях от положения равновесия);
- наличие малого трения в системе.
Механические волны – это процесс распространения колебаний в упругой среде.
Содержание
- Виды волн
- Гармонические колебания
- Амплитуда и фаза колебаний
- Период колебаний
- Частота колебаний
- Свободные колебания (математический и пружинный маятники)
- Вынужденные колебания
- Резонанс
- Длина волны
- Звук
- Основные формулы по теме «Механические колебания и волны»
Виды волн
- Поперечная – это волна, в которой колебание частиц среды происходит перпендикулярно направлению распространения волны.
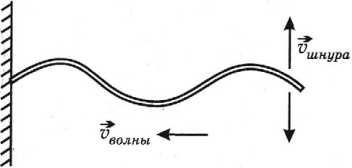
Поперечная волна представляет собой чередование горбов и впадин.
Поперечные волны возникают вследствие сдвига слоев среды относительно друг друга, поэтому они распространяются в твердых телах.
- Продольная – это волна, в которой колебание частиц среды происходит в направлении распространения волны.
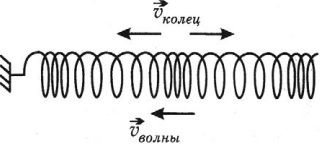
Продольная волна представляет собой чередование областей уплотнения и разряжения.
Продольные волны возникают из-за сжатия и разряжения среды, поэтому они могут возникать в жидких, твердых и газообразных средах.
Важно!
Механические волны не переносят вещество среды. Они переносят энергию, которая складывается из кинетической энергии движения частиц среды и потенциальной энергии ее упругой деформации.
Гармонические колебания
Гармонические колебания – простейшие периодические колебания, при которых координата тела меняется по закону синуса или косинуса:

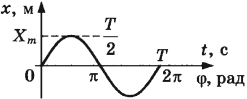
где ( x ) – координата тела – смещение тела от положения равновесия в данный момент времени; ( A ) – амплитуда колебаний; ( omega t+varphi_0 ) – фаза колебаний; ( omega ) – циклическая частота; ( varphi_0 ) – начальная фаза.
Если в начальный момент времени тело проходит положение равновесия, то колебания являются синусоидальными.
Если в начальный момент времени смещение тела совпадает с максимальным отклонением от положения равновесия, то колебания являются косинусоидальными.
Скорость гармонических колебаний
Скорость гармонических колебаний есть первая производная координаты по времени:

где ( v ) – мгновенное значение скорости, т. е. скорость в данный момент времени.
Амплитуда скорости – максимальное значение скорости колебаний, это величина, стоящая перед знаком синуса или косинуса:

Ускорение гармонических колебаний
Ускорение гармонических колебаний есть первая производная скорости по времени:

где ( a ) – мгновенное значение ускорения, т. е. ускорение в данный момент времени.
Амплитуда ускорения – максимальное значение ускорения, это величина, стоящая перед знаком синуса или косинуса:

Если тело совершает гармонические колебания, то сила, действующая на тело, тоже изменяется по гармоническому закону:
где ( F ) – мгновенное значение силы, действующей на тело, т. е. сила в данный момент времени.
Амплитуда силы – максимальное значение силы, величина, стоящая перед знаком синуса или косинуса:
Тело, совершающее гармонические колебания, обладает кинетической или потенциальной энергией:
где ( W_k ) – мгновенное значение кинетической энергии, т. е. кинетическая энергия в данный момент времени.
Амплитуда кинетической энергии – максимальное значение кинетической энергии, величина, стоящая перед знаком синуса или косинуса:
При гармонических колебаниях каждую четверть периода происходит переход потенциальной энергии в кинетическую и обратно.
В положении равновесия:
- потенциальная энергия равна нулю;
- кинетическая энергия максимальна.
При максимальном отклонении от положения равновесия:
- кинетическая энергия равна нулю;
- потенциальная энергия максимальна.
Полная механическая энергия гармонических колебаний
При гармонических колебаниях полная механическая энергия равна сумме кинетической и потенциальной энергий в данный момент времени:
Важно!
Следует помнить, что период колебаний кинетической и потенциальной энергий в 2 раза меньше, чем период колебаний координаты, скорости, ускорения и силы. А частота колебаний кинетической и потенциальной энергий в 2 раза больше, чем частота колебаний координаты, скорости, ускорения и силы.
Графики зависимости кинетической, потенциальной и полной энергий всегда лежат выше оси времени.
Если сила сопротивления отсутствует, то полная энергия сохраняется. График зависимости полной энергии от времени есть прямая, параллельная оси времени (в отсутствие сил трения).
Амплитуда и фаза колебаний
Амплитуда колебаний – модуль наибольшего смещения тела от положения равновесия.
Обозначение – ( A, (X_{max}) ), единицы измерения – м.
Фаза колебаний – это величина, которая определяет состояние колебательной системы в любой момент времени.
Обозначение – ( varphi ), единицы измерения – рад (радиан).

Фаза колебаний – это величина, стоящая под знаком синуса или косинуса. Она показывает, какая часть периода прошла от начала колебаний.
Фаза гармонических колебаний в процессе колебаний изменяется.
( varphi_0 ) – начальная фаза колебаний.
Начальная фаза колебаний – величина, которая определяет положение тела в начальный момент времени.
Важно!
Путь, пройденный телом за одно полное колебание, равен четырем амплитудам.
Период колебаний
Период колебаний – это время одного полного колебания.
Обозначение – ( T ), единицы измерения – с.

Период гармонических колебаний – постоянная величина.
Частота колебаний
Частота колебаний – это число полных колебаний в единицу времени.
Обозначение – ( nu ), единицы времени – с-1 или Гц (Герц).
1 Гц – это частота такого колебательного движения, при котором за каждую секунду совершается одно полное колебание:
Период и частота колебаний – взаимно обратные величины:
Циклическая частота – это число колебаний за 2π секунд.
Обозначение – ( omega ), единицы измерения – рад/с.
Свободные колебания (математический и пружинный маятники)
Свободные колебания – колебания, которые совершает тело под действием внутренних сил системы за счет начального запаса энергии после того как его вывели из положения устойчивого равновесия.
Условия возникновения свободных колебаний:
- при выведении тела из положения равновесия должна возникнуть сила, стремящаяся вернуть его в положение равновесия;
- силы трения в системе должны быть достаточно малы. При наличии сил трения свободные колебания будут затухающими.
При наличии сил трения свободные колебания будут затухающими.
Затухающие колебания – это колебания, амплитуда которых с течением времени уменьшается.
Математический маятник – это материальная точка, подвешенная на невесомой нерастяжимой нити.
Период колебаний математического маятника:

Частота колебаний математического маятника:
Циклическая частота колебаний математического маятника:

Максимальное значение скорости колебаний математического маятника:
Максимальное значение ускорения колебаний математического маятника:
Период свободных колебаний математического маятника, движущегося вверх с ускорением или вниз с замедлением:
Период свободных колебаний математического маятника, движущегося вниз с ускорением или вверх с замедлением:
Период свободных колебаний математического маятника, горизонтально с ускорением или замедлением:
Мгновенное значение потенциальной энергии математического маятника, поднявшегося в процессе колебаний на высоту ( h ), определяется по формуле:
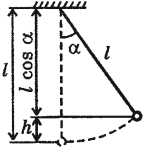
где ( l ) – длина нити, ( alpha ) – угол отклонения от вертикали.
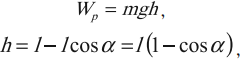
Пружинный маятник – это тело, подвешенное на пружине и совершающее колебания вдоль вертикальной или горизонтальной оси под действием силы упругости пружины.
Период колебаний пружинного маятника:
Частота колебаний пружинного маятника:
Циклическая частота колебаний пружинного маятника:

Максимальное значение скорости колебаний пружинного маятника:
Максимальное значение ускорения колебаний пружинного маятника:
Мгновенную потенциальную энергию пружинного маятника можно найти по формуле:
Амплитуда потенциальной энергии – максимальное значение потенциальной энергии, величина, стоящая перед знаком синуса или косинуса:
Важно!
Если маятник не является ни пружинным, ни математическим (физический маятник), то его циклическую частоту, период и частоту колебаний по формулам, применимым к математическому и пружинному маятнику, рассчитать нельзя. В данном случае эти величины рассчитываются из формулы силы, действующей на маятник, или из формул энергий.
Вынужденные колебания
Вынужденные колебания – это колебания, происходящие под действием внешней периодически изменяющейся силы.
Вынужденные колебания, происходящие под действием гармонически изменяющейся внешней силы, тоже являются гармоническими и незатухающими. Их частота равна частоте внешней силы и называется частотой вынужденных колебаний.
Резонанс
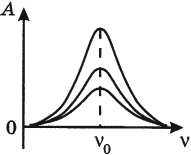
Резонанс – явление резкого возрастания амплитуды колебаний, которое происходит при совпадении частоты вынуждающей силы и собственной частоты колебаний тела.
Условие резонанса:

( v_0 ) – собственная частота колебаний маятника.
На рисунке изображены резонансные кривые для сред с разным трением. Чем меньше трение, тем выше и острее резонансная кривая.
Явление резонанса учитывается при периодически изменяющихся нагрузках в машинах и различных сооружениях.
Также резонанс используется в акустике, радиотехнике и т. д.
Длина волны
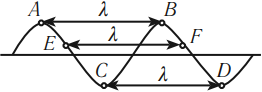
Длина волны – это расстояние, на которое волна распространяется за один период, т. е. это кратчайшее расстояние между двумя точками среды, колеблющимися в одинаковых фазах.
Обозначение – ( lambda ), единицы измерения – м.

Расстояние между соседними гребнями или впадинами в поперечной волне и между соседними сгущениями или разряжениями в продольной волне равно длине волны.
Скорость распространения волны – это скорость перемещения горбов и впадин в поперечной волне и сгущений или разряжений в продольной волне.
Звук
Звук – это колебания упругой среды, воспринимаемые органом слуха.
Условия, необходимые для возникновения и ощущения звука:
- наличие источника звука;
- наличие упругой среды между источником и приемником звука;
- наличие приемника звука; • частота колебаний должна лежать в звуковом диапазоне;
- мощность звука должна быть достаточной для восприятия.
Звуковые волны – это упругие волны, вызывающие у человека ощущение звука, представляющие собой зоны сжатия и разряжения, передающиеся на расстояние с течением времени.
Классификация звуковых волн:
- инфразвук (( nu ) < 16 Гц);
- звуковой диапазон (16 Гц < ( nu ) < 20 000 Гц);
- ультразвук (( nu ) > 20 000 Гц).
Скорость звука – это скорость распространения фазы колебания, т. е. области сжатия и разряжения среды.
Скорость звука зависит
- от упругих свойств среды:
в воздухе – 331 м/с, в воде – 1400 м/с, в металле – 5000 м/с;
- от температуры среды:
в воздухе при температуре 0°С – 331 м/с,
в воздухе при температуре +15°С – 340 м/с.
Характеристики звуковой волны
- Громкость – это величина, характеризующая слуховые ощущения человека, зависящая от амплитуды колебаний в звуковой волне. Единицы измерения – дБ (децибел).
- Высота тона – это величина, характеризующая слуховые ощущения человека, зависящая от частоты колебаний в звуковой волне. Чем больше частота, тем выше звук. Чем меньше частота, тем ниже звук.
- Тембр – это окраска звука.
Музыкальный звук – это звук, издаваемый гармонически колеблющимся телом. Каждому музыкальному тону соответствует определенная длина и частота звуковой волны.
Шум – хаотическая смесь тонов.
Основные формулы по теме «Механические колебания и волны»
Механические колебания и волны
3 (59.17%) 145 votes