Содержание:
Волновое движение:
Процесс распространения колебаний в упругой среде называют механической волной. Для механических волн нужна среда, обладающая способностью запасать кинетическую и потенциальную энергию, она должна обладать инертными и упругими свойствами.
Различают поперечные и продольные волны. Продольные волны могут распространяться в любых средах: твердых, жидких и газообразных; поперечные – только в твердых средах.
Как в поперечных, так и в продольных волнах переноса вещества в направлении распространения волны не происходит. Волны переносят энергию колебаний.
Изучив страницу, вы сможете:
- исследовать образование стоячих звуковых волн в воздухе;
- объяснять механизм образования стоячих волн, определять узлы и пучности, используя графический метод;
- исследовать интерференцию от двух источников на поверхности воды;
- объяснять принцип Гюйгенса и условия наблюдения дифракционной картины механических волн.
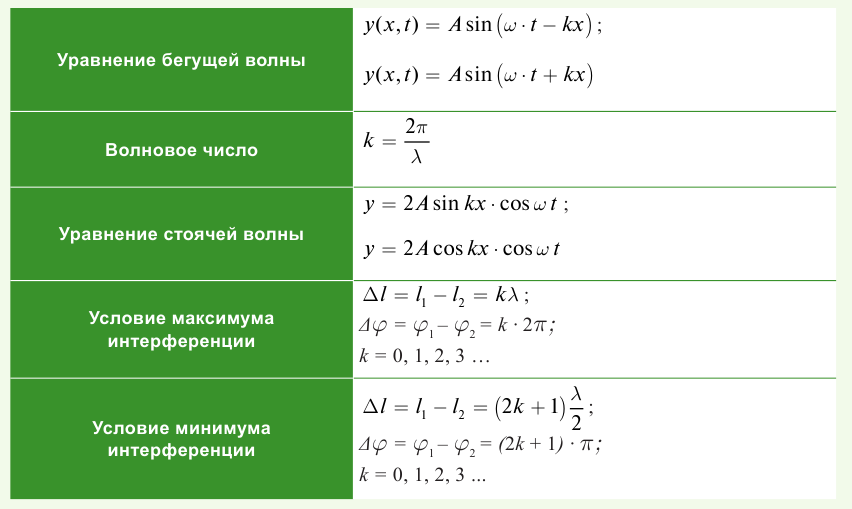
Уравнение бегущей волны
Колебательное движение тела в упругой среде является источником механической волны.
Волну, переносящую энергию, называют бегущей волной.
В однородной среде скорость распространения волны остается величиной постоянной. Смещение y (x, t) от положения равновесия частиц среды при распространении волны зависит от координаты x на оси 0х, вдоль которой распространяется волна, и от времени t по закону:

где 
Введем волновое число  тогда уравнение бегущей волны примет вид
тогда уравнение бегущей волны примет вид 
Смещение точек упругой среды в волне, бегущей в противоположном направлении выбранной оси 0х, можно определить по формуле: 
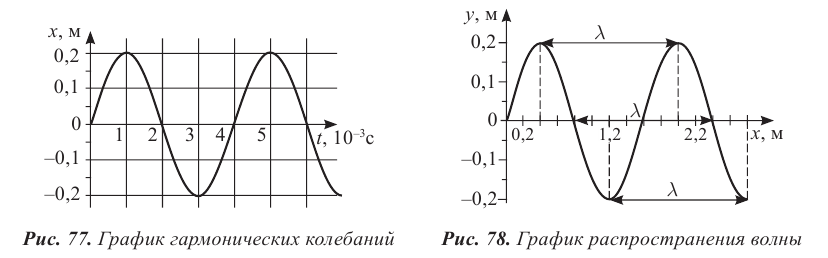
Вспомните! Основные характеристики волн. Волны, созданные источником, совершающим гармонические колебания, характеризуются амплитудой колебания частиц среды A, частотой  длиной волны
длиной волны  и скоростью распространения
и скоростью распространения 
Длиной волны называют расстояние между двумя соседними точками на оси 0х, колеблющимися в одинаковых фазах. Расстояние, равное длине волны , волна пробегает за период Т, следовательно,  В однородных средах скорость распространения волны величина постоянная.
В однородных средах скорость распространения волны величина постоянная.
Физический смысл волнового числа
Запишем формулу (2), выразив циклическую частоту через период  с учетом определения длины волны
с учетом определения длины волны  получим:
получим: 
Бегущая волна обладает двойной периодичностью – во времени и в пространстве. Временной период равен периоду колебаний T частиц среды, пространственный период равен длине волны  Волновое число
Волновое число  является пространственным аналогом циклической частоты
является пространственным аналогом циклической частоты 
Фронт волны и волновая поверхность
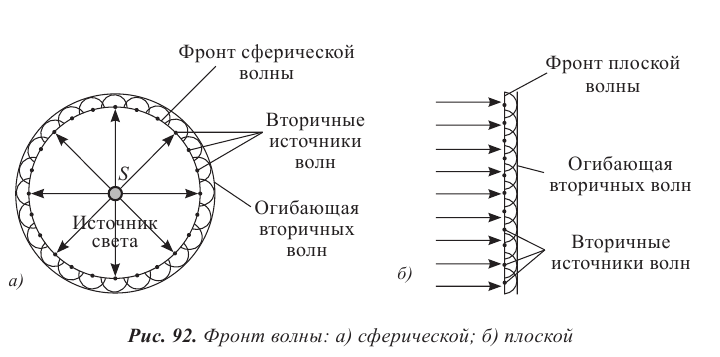
Волна за время, равное периоду колебаний, достигает точек пространства, расположенных от источника на расстоянии длины волны. Совокупность этих точек представляет собой фронт волны, который отделяет колеблющиеся точки среды от точек, не вовлеченных в колебательное движение. Фронт волны от точечного источника представляет собой сферу, от плоской пластины – плоскость, от струны – форму цилиндра (рис. 79–81).
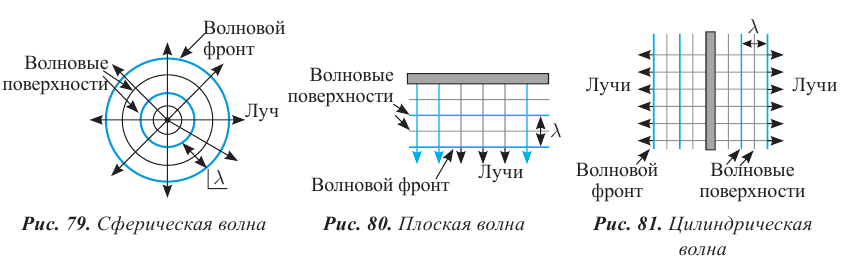
Фронт волны – это геометрическое место точек пространства, до которых дошли колебания в данный момент времени t.
Направление распространения волны указывает луч, который перпендикулярен фронту волны.
В волне можно рассмотреть множество поверхностей, все точки которых совершают колебания синфазно, их называют волновыми поверхностями. При множестве волновых поверхностей, фронт волны только один.
Геометрическое место точек пространства, которые совершают колебания в одинаковой фазе в данный момент времени, называют волновой поверхностью.
Стоячие волны
Уравнение стоячей волны При отражении от более плотной среды волна, изменив свое направление на обратное, меняет фазу на  то есть на противоположную. В результате сложения падающей и отраженной волн образуется стоячая волна. Она имеет вид, представленный на рисунке 83. В стоячей волне существуют неподвижные точки, которые называются узлами. Посередине между узлами находятся точки, которые колеблются с максимальной амплитудой. Эти точки называются пучностями.
то есть на противоположную. В результате сложения падающей и отраженной волн образуется стоячая волна. Она имеет вид, представленный на рисунке 83. В стоячей волне существуют неподвижные точки, которые называются узлами. Посередине между узлами находятся точки, которые колеблются с максимальной амплитудой. Эти точки называются пучностями.
Получим уравнение стоячей волны путем сложения уравнений бегущих волн: 
Заменив волновое число его значением  запишем уравнение стоячей волны в виде:
запишем уравнение стоячей волны в виде: 
Координаты точек пучностей и узлов определяются из условий наибольшего и наименьшего значений амплитуды. При  образуется пучность с амплитудой равной 2 А (рис. 84). Расстояния от источника стоячей волны до пучностей равны:
образуется пучность с амплитудой равной 2 А (рис. 84). Расстояния от источника стоячей волны до пучностей равны: 
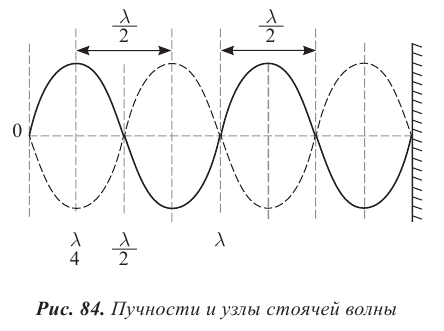
При  образуются узлы, амплитуда колебаний в этой точке равна 0. Расстояния от источника волны до узлов равны:
образуются узлы, амплитуда колебаний в этой точке равна 0. Расстояния от источника волны до узлов равны:

Расстояния между двумя соседними пучностями или двумя соседними узлами равны:

В стоячей волне нет потока энергии. Колебательная энергия, заключенная в отрезке струны между двумя соседними узлами, не переносится в другие части струны. В каждом таком отрезке происходит дважды за период превращение кинетической энергии в потенциальную и обратно как в обычной колебательной системе. Отсутствие переноса энергии является отличительной особенностью стоячей волны.
Пример:
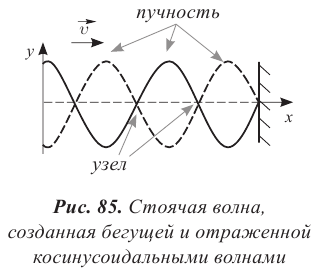
Уравнение бегущей волны, изображенной на рисунке (рис. 85):  . Уравнение отраженной волны:
. Уравнение отраженной волны: 
А. Получите уравнение стоячей волны как сумму падающей и отраженной волн.
В. Полученное выражение запишите, заменив волновое число и циклическую частоту через длину волны и период.
С. Определите положение узлов и пучностей.
Дано:
Решение: А. Уравнение стоячей волны определятся сложением уравнений бегущих волн:

В. 
С. При  образуется пучность с амплитудой 2А. Расстояние от источника до пучностей
образуется пучность с амплитудой 2А. Расстояние от источника до пучностей 
С. Расстояние от узлов определим из условия  тогда
тогда
Ответ: 
Интерференция волн
Если в некоторой среде несколько источников возбуждают механические волны, то они распространяются независимо друг от друга. Все точки среды принимают участие в колебаниях, вызванных каждой волной в отдельности. Наложение волн, в результате которой появляется устойчивая картина чередующихся максимумов и минимумов колебаний частиц среды, называют интерференцией.
Интерферировать могут только волны, имеющие одинаковую частоту и постоянный сдвиг фаз. Такие волны называют когерентными, их создают источники, колеблющиеся с одинаковой частотой и постоянным значением сдвига фаз.
Интерференция волн – взаимное увеличение или уменьшение результирующей амплитуды двух или нескольких когерентных волн при их наложении друг на друга.
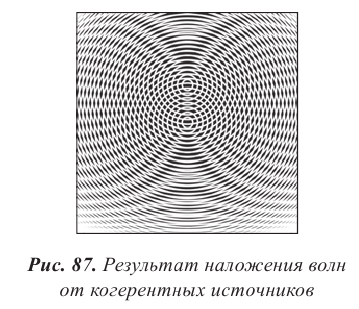
Интерференция бывает стационарной и нестационарной. Стационарную интерференционную картину могут давать только когерентные волны: например, две сферические волны на поверхности воды, распространяющиеся от двух когерентных точечных источников (рис. 87).
Запомните! Волны называют когерентными, если их источники совершают колебания одной частоты с постоянным сдвигом фаз.
Условие максимума и минимума при интерференции двух волн
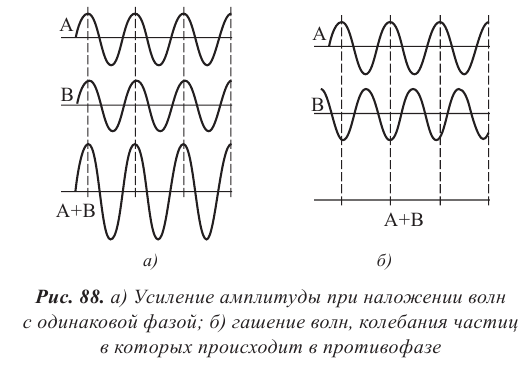
Амплитуда колебаний при наложении волн определяется в соответствии с принципом суперпозиции (рис. 88). Если в некоторой точке среды накладываются гребни когерентных волн, то происходит усиление колебаний, амплитуда принимает значение, равное сумме амплитуд. Если накладывается гребень одной волны с впадиной другой волны, то при равенстве амплитуд отдельно взятых волн данная точка пространства не совершает колебания. Если амплитуды отличаются, то колебания в этой точке совершаются с амплитудой равной разности амплитуд распространяющихся волн.
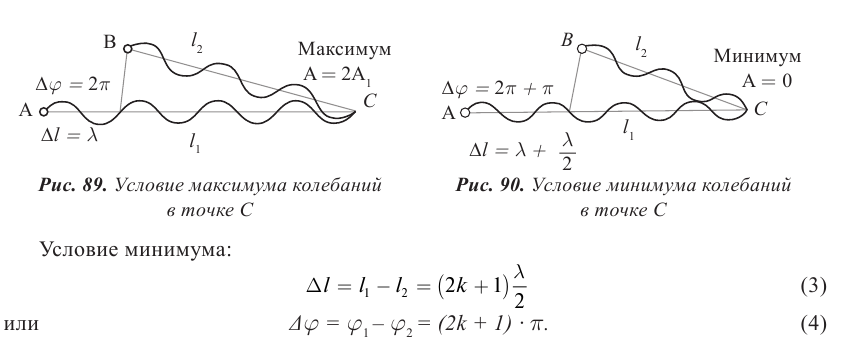
Для определения результата интерференции волн, распространяющихся от двух источников А и В, находящихся на расстоянии  от точки С, достаточно определить разность хода волн и сравнить с длиной волны. Если разность хода равна целому числу длин волн, то в точке С произойдет наложение гребней или впадин, амплитуда колебаний возрастет (рис. 89). Выполняется условие максимума:
от точки С, достаточно определить разность хода волн и сравнить с длиной волны. Если разность хода равна целому числу длин волн, то в точке С произойдет наложение гребней или впадин, амплитуда колебаний возрастет (рис. 89). Выполняется условие максимума:

где  − разность хода волн,
− разность хода волн,  – натуральное число, равное 0, 1, 2, 3 … Разность хода лучей соответствует разности фаз колебаний:
– натуральное число, равное 0, 1, 2, 3 … Разность хода лучей соответствует разности фаз колебаний:

так как волна за период пробегает расстояние равное длине волны  периоду Т соответствует фаза
периоду Т соответствует фаза 
Минимум колебаний в рассматриваемой точке среды наблюдается в том случае, если от двух когерентных источников распространяются волны со сдвигом фаз, равным нечетному числу p, а разность хода лучей кратна нечетному числу полуволн. В этом случае колебания происходят в противофазе (рис. 90).
Возьмите на заметку:
Интерференция волн приводит к перераспределению энергии колебаний между частицами среды. Это не противоречит закону сохранения энергии, так как в среднем, для большой области пространства, энергия результирующей волны равна сумме энергий интерферирующих волн.
Распространение волн. Принцип Гюйгенса – Френеля
На основе принципа Х. Гюйгенса: каждая точка среды, до которой дошло возмущение, является источником вторичных волн, невозможно объяснить, почему источники вторичных волн создают фронт только по направлению распространения волны. Для объяснения явлений распространения волны французский физик О. Френель в 1815 г. дополнил принцип Х. Гюйгенса представлениями о когерентности и интерференции вторичных волн. При наложении вторичных когерентных волн происходит интерференция, в результате которой амплитуда колебаний в различных точках пространства становится разной: по направлению распространения волны усиливается, в обратном направлении – уменьшается. Огибающая фронты вторичных волн является фронтом результирующей волны (рис. 92).
Дифракция механических волн
Вторичные волны, созданные точками среды, которые находятся на краю отверстия или препятствия, искривляются и волна огибает препятствие (рис. 93 а–г).
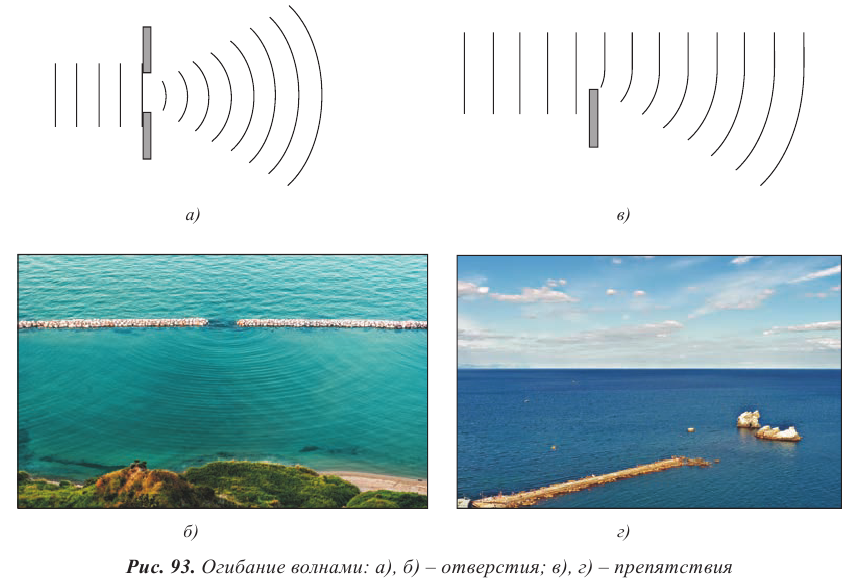
Дифракция – это явление огибания волнами препятствий.
Все волны способны огибать препятствия, если длина волны соизмерима с размерами препятствия. Дифракция становится заметной, если размеры препятствия меньше длины волны.
Физика в нашей жизни:
Струнные музыкальные инструменты
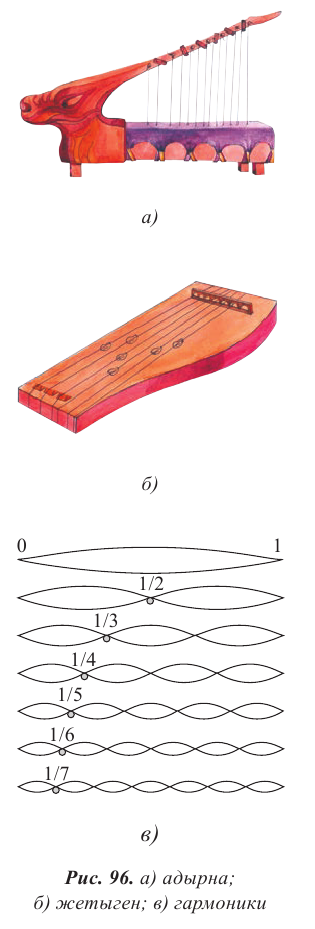
Интересно знать! Адырна (рис. 96 а) – один из древнейших казахских струнных инструментов. В его форме отобразилась воинственность кочевников-казахов: он напоминает изогнутый лук воина. Деревянный корпус инструмента легкий, так как он пустотелый. Струны изготавливают из кусков специально выделанной кожи или сплетенных из верблюжьей шерсти нитей. Музыкант играет, перебирая струны. Их в инструменте 13. Жетыген (рис. 96 б) – семиструнный музыкальный инструмент. Он имеет прямоугольную форму, изготовлен из дерева, струны – из конского волоса. Легенда о жетыгене раскрывает причину использования именно семи струн. Старик, потерявший семерых сыновей, вылил свое горе, исполняя кюи о них. Вспоминая каждого из сыновей, он натягивал новую струну на музыкальном инструменте.
Условие возникновения стоячей волны в струне
Стоячая волна в струне возникает только в том случае, если длина  струны равняется целому числу длин полуволн:
струны равняется целому числу длин полуволн: 
Набору значений  длин волн соответствует набор возможных частот
длин волн соответствует набор возможных частот  Каждая из частот
Каждая из частот  и связанный с ней тип колебания струны называется нормальной модой. Наименьшая частота называется основной частотой, все остальные частоты называются гармониками.
и связанный с ней тип колебания струны называется нормальной модой. Наименьшая частота называется основной частотой, все остальные частоты называются гармониками.
В отличие от груза на пружине или маятника, у которых имеется единственная собственная частота, струна обладает бесконечным числом собственных резонансных частот. На рисунке 96 в изображены несколько типов стоячих волн в струне. Стоячие волны различных типов могут одновременно присутствовать в колебаниях струны.
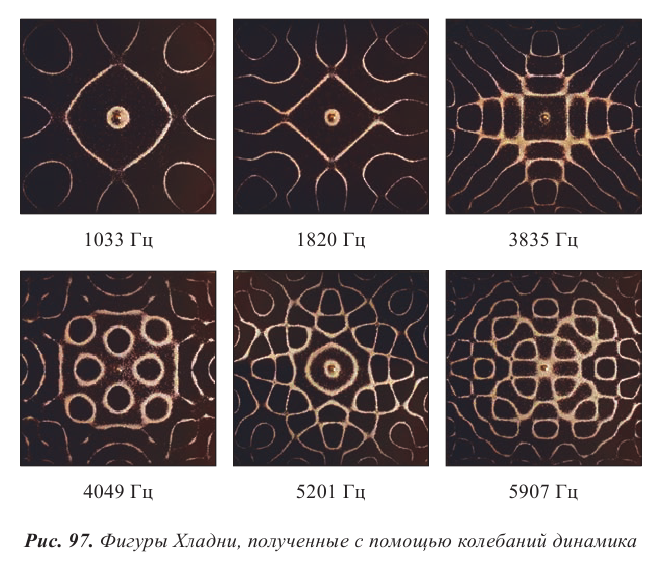
Визуализация звуковых волн
Существует несколько способов демонстрации стоячей волны, один из них – фигуры Хладни (рис. 97). Немецкий физик Эрнст Хладни получал узор, посыпая пластинку песком и проводя по краю смычком. Движения смычка заставляли пластинку колебаться на некоторой резонансной частоте. Песок скапливался и лежал неподвижно в узлах, а на участках, где отраженная волна усиливала бегущую, песок смещался.
Интересно знать! В Шотландии есть рослинская капелла св. Матвея, на одной из арок которой есть 213 резных каменных кубов, с вырезанным на них геометрическим рисунком. Многие исследователи пытались понять, что зашифровано в рисунках на кубах. Отставной генерал ВВС Томас Митчел со своим сыном, пианистом Стюартом Митчелом предложили оригинальный способ расшифровки послания. Они сопоставили геометрические рисунки с фигурами Хладни и пришли к выводу, что на кубах записаны ноты. Собрав ноты воедино и творчески обработав их, они представили миру произведение «Рослинский Мотет».
Итоги:
Глоссарий
Волновая поверхность – геометрическое место точек, имеющих одинаковую фазу колебаний.
Дифракция – явление огибания волнами препятствий.
Интерференция волн – взаимное увеличение или уменьшение результирующей амплитуды двух или нескольких когерентных волн при их наложении друг на друга.
Когерентные волны – волны, имеющие одинаковую частоту и постоянный сдвиг фаз.
Механическая волна – процесс распространения колебаний в упругой среде.
Фронт волны – геометрическое место точек пространства, до которых дошли колебания в данный момент времени t.
Распространение колебаний в упругих средах. Продольные и поперечные волны
Опыт показывает, что колебания, возбужденные в какой-либо точке упругой среды, с течением времени передаются в ее другие точки. В качестве примера достаточно вспомнить, что измерение пульса осуществляется на запястье, хотя сердце расположено внутри грудной клетки. Такие явления связаны с распространением механических волн.
Механической волной называется процесс распространения колебаний в упругой среде, который сопровождается передачей энергии от одной точки среды к другой.
Механические волны не могут распространяться в вакууме.
Источником механических волн является колеблющееся тело. Если источник колеблется синусоидально, то и волна в упругой среде будет иметь форму синусоиды. Колебания, вызванные в каком-либо месте упругой среды, распространяются в ней с определенной скоростью, зависящей от плотности и упругих свойств среды.
Подчеркнем, что при распространении волны отсутствует перенос вещества, т. е. частицы колеблются вблизи положений равновесия. Среднее смещение частиц за большой промежуток времени равно нулю.
Рассмотрим основные характеристики волны.
Волновой фронт — это воображаемая поверхность, до которой дошло волновое возмущение в данный момент времени.
Линия, проведенная перпендикулярно волновому фронту в направлении распространения волны, называется лучом. Луч указывает направление распространения волны.
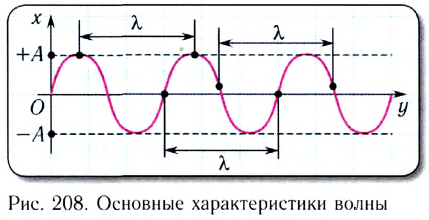
Основными характеристиками волны являются (рис. 208):
Рассмотрим колебания источника волны, происходящие с циклической частотой  и амплитудой А:
и амплитудой А:

где x(t) — смещение источника от положения равновесия.
В некоторую точку среды колебания придут не мгновенно, а через промежуток времени, определяемый скоростью волны и расстоянием от источника до точки наблюдения. Если скорость волны в данной среде равна v, то зависимость от времени t координаты (смещения) х колеблющейся точки, находящейся на расстоянии r от источника, описывается функцией

где k — волновое число  фаза волны.
фаза волны.
Выражение х(t, r) называется уравнением плоской волны, распространяющейся (бегущей) вдоль направления радиус-вектора 
Бегущую волну можно наблюдать, проведя следующий опыт: если один конец резинового шнура, лежащего на гладком горизонтальном столе, закрепить и, слегка натянув шнур рукой, привести его второй конец в колебательное движение в направлении, перпендикулярном шнуру, то по нему побежит волна, описываемая уравнением плоской волны.
Рассмотрим классификацию бегущих волн по направлению колебаний частиц среды, в которой они распространяются.
Волна называется продольной, если колебания частиц среды происходят вдоль направления распространения волн. Продольную волну легко получить с помощью длинной пружины, которая лежит на гладкой горизонтальной поверхности и один конец ее закреплен. Легким ударом по свободному концу В пружины мы вызовем появление волны (рис. 209).
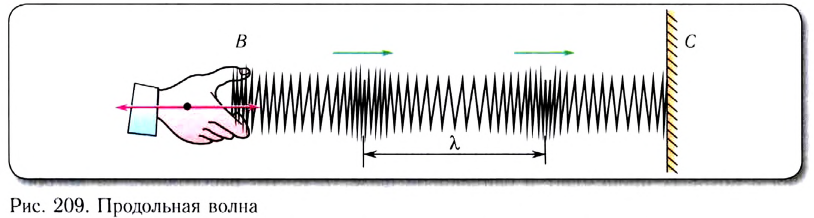
При этом каждый виток пружины будет колебаться вдоль направления распространения волны ВС. Примерами продольных волн являются звуковые волны в воздухе и жидкости.
Волна называется поперечной, если частицы среды колеблются в плоскости, перпендикулярной направлению распространения волны. С помощью длинной пружины можно продемонстрировать распространение поперечных волн, если совершать колебания незакрепленного конца перпендикулярно пружине (рис. 210).
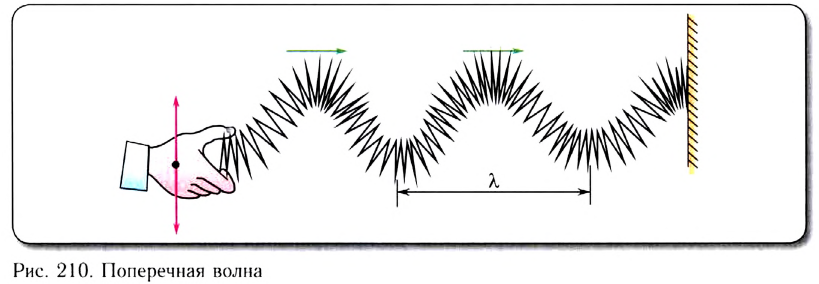
Поперечные волны вызывают звучание струн музыкальных инструментов при их возбуждении.
Продольные колебания симметричны относительно линии распространения ВС, и их действие на любой регистрирующий прибор не изменяется, если прибор будет поворачиваться вокруг направления распространения.
Действие поперечных волн на регистрирующий прибор зависит от того, в какой плоскости, проходящей через линию распространения, происходит колебание. Эта особенность поперечных волн носит название поляризации. Если колебания происходят в одной плоскости, то волну называют плоско или линейно поляризованной. Если конец вектора колебаний, например вектора смещения, скорости, напряженности электрического поля, описывает эллипс или окружность, то волну называют эллиптически или циркулярно-поляризованной.
До сих пор мы рассматривали волны, распространяющиеся в какой-либо среде. Волны, которые распространяются на границе раздела двух сред, называются поверхностными волнами. Примером данного типа волн служат волны на поверхности воды.
Звуковые волны. Скорость звука. Ультразвук
Звуком называются колебания среды, воспринимаемые органами слуха.
Раздел физики, в котором изучаются звуковые явления, называется акустикой.
Звуковая волна — упругая продольная волна, представляющая собой зоны сжатия и разрежения упругой среды (например, воздуха), распространяющиеся в пространстве с течением времени. Таким образом, в процессе распространения звуковой волны меняются такие характеристики среды, как давление и плотность.
Звуковые волны классифицируются по частоте следующим образом:
Многие животные могут воспринимать ультразвуковые частоты. Например, собаки могут слышать звуки до 50 000 Гц, а летучие мыши — до 100 000 Гц. Инфразвук, распространяясь в воде на сотни километров, помогает китам и многим другим морским животным ориентироваться в толще воды.
Звуковые волны приносят человеку жизненно важную информацию — с их помощью мы общаемся, наслаждаемся мелодиями, узнаем по голосу знакомых людей. Мир окружающих нас звуков разнообразен и сложен, однако мы достаточно легко ориентируемся в нем и безошибочно можем отличить пение птиц от шума городской улицы.
Одной из важнейших характеристик звуковых волн является спектр. Спектром называется набор различных частот, образующих данный звуковой сигнал. Спектр может быть сплошным или дискретным.
В сплошном спектре присутствуют волны, частоты которых заполняют весь заданный спектральный диапазон.
В
дискретном спектре — конечное число волн с определенными частотами и амплитудами, которые образуют рассматриваемый сигнал.
По типу спектра звуки разделяются на шумы и музыкальные тона.
Шум — совокупность множества разнообразных кратковременных звуков (хруст, шелест, шорох, стук и т.п.) — представляет собой наложение большого числа колебаний с близкими амплитудами, но различными частотами (имеет сплошной спектр).
Музыкальный тон создается периодическими колебаниями звучащего тела (камертон, струна) и представляет собой гармоническое колебание одной частоты. На основе музыкальных тонов создана музыкальная азбука — ноты (до, ре, ми, фа, соль, ля, си), которые позволяют воспроизводить одну и ту же мелодию па различных музыкальных инструментах.
Музыкальный звук (созвучие) — результат наложения нескольких одновременно звучащих музыкальных тонов, из которых можно выделить
основной тон, соответствующий наименьшей частоте. Основной тон называется также первой гармоникой. Все остальные тоны называются обертонами. Обертоны называются гармоническими, если частоты обертонов кратны частоте основного тона. Таким образом, музыкальный звук имеет дискретный спектр.
Любой звук, помимо частоты, характеризуется интенсивностью.
Интенсивность I — это энергия  переносимая волной в единицу времени
переносимая волной в единицу времени  = 1 с через единичную площадку площадью
= 1 с через единичную площадку площадью  расположенную перпендикулярно к направлению распространения волны:
расположенную перпендикулярно к направлению распространения волны:

Другими словами, интенсивность любой волны — мощность, переносимая волной через единичную площадку, расположенную перпендикулярно к направлению распространения волны.
Единицей интенсивности в СИ является ватт на метр в квадрате 
Чтобы вызвать звуковые ощущения, волна должна обладать некоторой минимальной интенсивностью, называемой порогом слышимости.
С возрастом порог слышимости человека возрастает.
Интенсивность звуковых волн, при которой возникает ощущение боли, называют порогом болевого ощущения или болевым порогом. Интенсивность звука, улавливаемого ухом человека, лежит в широких пределах: от  (порог слышимости) до
(порог слышимости) до  (порог болевого ощущения). Человек может слышать и более интенсивные звуки, но при этом он будет испытывать боль.
(порог болевого ощущения). Человек может слышать и более интенсивные звуки, но при этом он будет испытывать боль.
Реактивный самолет может создать звук интенсивностью  мощные усилители на концерте в закрытом помещении — до
мощные усилители на концерте в закрытом помещении — до  поезд метро — около
поезд метро — около 
Уровни интенсивности звука L определяют обычно, используя шкалу, единицей которой является бел (Б) или, что гораздо чаще, децибел (дБ) (одна десятая бела). 1 Б самый слабый звук, который воспринимает наше ухо. Единица названа в честь изобретателя телефона А. Г. Белла. Измерение уровня интенсивности в децибелах проще, поэтому принято в физике и технике.
Уровень интенсивности L любого звука в децибелах вычисляется через интенсивность звука по формуле
где I — интенсивность данного звука,  — интенсивность
— интенсивность  соответствующая минимально возможной интенсивности звука, улавливаемого ухом человека.
соответствующая минимально возможной интенсивности звука, улавливаемого ухом человека.
Так, поезд метро создает уровень интенсивности звука 100 дБ, мощные усилители — 120 дБ, а реактивный самолет — 150 дБ. Тем, кто при работе подвергается воздействию шума свыше 100 дБ, следует пользоваться наушниками.
Физическим характеристикам звука соответствуют определенные (субъективные) характеристики, связанные с восприятием его конкретным человеком. Это связано с тем, что восприятие звука — процесс не только
физический, но и физиологический. Действительно, человеческое ухо воспринимает звуковые колебания определенных частот и интенсивностей (это объективные, не зависящие от человека характеристики звука) по-разному, в зависимости от «характеристик приемника» (здесь влияют субъективные индивидуальные черты каждого человека).
Основными физиологическими характеристиками звука являются громкость, высота и тембр.
Громкость (степень слышимости звука) определяется как интенсивностью звука (амплитудой колебаний в звуковой волне), так и различной чувствительностью человеческого уха на разных частотах, т. е. его способностью улавливать звуки различных частот. Наибольшей чувствительностью человеческое ухо обладает в диапазоне частот от 1000 Гц до <5000 Гц. Порог слышимости зависит от частоты звука: при частоте 1000 Гц он примерно 120—130 дБ, а при частоте 50 Гц — примерно 50 дБ. С частотой изменяется также и кажущаяся громкость звука. Звук, имеющий уровень интенсивности 20 дБ на частоте 1000 Гц, вследствие особенностей восприятия будет иметь такую же громкость, как и звук в 50 дБ на частоте 100 Гц. Следует отметить, что болевой порог в зависимости от частоты изменяется не столь существенно, как порог слышимости.
При увеличении интенсивности в 10 раз уровень громкости увеличивается на . 20 дБ. Вследствие этого звук в 50 дБ оказывается в 100 раз интенсивнее звука в 30 дБ.
Высота звука определяется частотой звуковых колебаний, обладающих наибольшей интенсивностью в спектре.
Тембр (оттенок звука) зависит от того, сколько обертонов присоединяется к основному тону и какова их интенсивность и частота. По тембру мы легко отличаем звуки скрипки и рояля, флейты и гитары, голоса людей (табл. 6) и т. д.
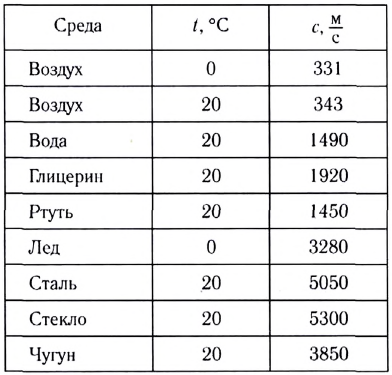
Скорость звука зависит от упругих свойств, плотности и температуры среды. Чем больше упругие силы, тем быстрее передаются колебания частиц соседним частицам и тем быстрее распространяется волна. Поэтому скорость звука в газах меньше, чем в жидкостях, а в жидкостях, как правило, меньше, чем в твердых телах (табл. 7).
Скорость звука в идеальных газах с ростом температуры растет пропорционально  где Т — абсолютная температура. В воздухе скорость звука
где Т — абсолютная температура. В воздухе скорость звука  при температуре t = 0 °C и с = 343
при температуре t = 0 °C и с = 343  при температуре t = 20 °C. В жидкостях и металлах скорость звука, как правило, уменьшается с ростом температуры (исключение — вода).
при температуре t = 20 °C. В жидкостях и металлах скорость звука, как правило, уменьшается с ростом температуры (исключение — вода).
Таблица 6
Частота колебаний различных источников звука
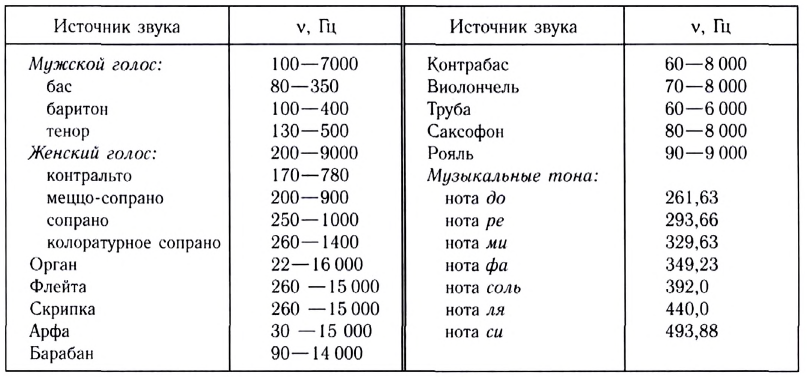
Таблица 7
Скорость звука с в различных средах
Впервые скорость распространения звука в воздухе была определена в 1640 г. французским физиком Мареном Мерсенном. Он измерял промежуток времени между моментами появления вспышки и звука при ружейном выстреле. Мерсенн определил, что скорость звука в воздухе равна 
Способ ориентации или исследования окружающих объектов, основанный на излучении ультразвуковых импульсов с последующим восприятием отраженных импульсов (эха) от различных объектов, называется эхолокацией, а соответствующие приборы — эхолокаторами. Наиболее известные животные, обладающие способностью к эхолокации, — летучие мыши и дельфины. По своему совершенству эхолокаторы этих животных не уступают, а во многом и превосходят (по надежности, точности, энергетической экономичности) современные эхолокаторы, созданные человеком.
Эхолокацию используют различные китообразные, а также птицы гуахаро, V. гнездящиеся в глубоких пещерах Венесуэлы и на острове Тринидад, стрижи-салаганы, живущие в пещерах Юго-Восточной Азии.
Эхолокаторы, используемые под водой, называются гидролокаторами или сонарами (название sonar образовано из начальных букв трех английских слов: sound — звук, navigation — навигация, range — дальность). Сонары незаменимы при исследованиях морского дна (его профиля, глубины), для обнаружения и исследования различных объектов, движущихся глубоко под водой. При их помощи могут быть легко обнаружены как отдельные большие предметы или животные, так и стаи небольших рыб или моллюсков.
Волны ультразвуковых частот широко используются в медицине в диагностических целях. УЗИ-сканеры позволяют исследовать внутренние органы человека. Ультразвуковое излучение, в отличие от рентгеновского, безвредно для человека.
Электромагнитные волны. Скорость электромагнитных волн
Основные характеристики механических волн:
Бегущая волна
Длина волны  — наименьшее расстояние между двумя точками, колебания в которых происходят в одинаковой фазе, т. с. это расстояние, на которое волна распространяется за промежуток времени, равный периоду колебаний источника
— наименьшее расстояние между двумя точками, колебания в которых происходят в одинаковой фазе, т. с. это расстояние, на которое волна распространяется за промежуток времени, равный периоду колебаний источника 
Скорость распространения волны:
Уравнение бегущей волны:

Продольная волна
Волна называется продольной, если колебания происходят вдоль направления распространения волн.
Поперечная волна
Волна называется поперечной, если колебания происходят в направлениях, перпендикулярных к направлению распространения волны.
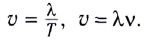
Впервые гипотезу о существовании электромагнитных волн высказал в 1864 г. Максвелл. Он показал, что источниками электрического поля могут быть либо электрические заряды, либо магнитные поля, меняющиеся во времени. Магнитные поля могут возбуждаться либо движущимися электрическими зарядами (электрическим током), либо переменными электрическими полями. Изменение индукции магнитного поля с течением времени вызывает появление в окружающем пространстве вихревого электрического поля. Силовые линии этого поля замкнуты, а вектор его напряженности  в любой точке пространства перпендикулярен вектору индукции
в любой точке пространства перпендикулярен вектору индукции  магнитного поля (рис. 211).
магнитного поля (рис. 211).
Максвелл предположил, что любое изменение напряженности электрического поля сопровождается возникновением вихревого магнитного поля.
Совокупность связанных друг с другом периодически изменяющихся электрического и магнитного полей называют электромагнитным полем. Согласно теории Максвелла переменное электромагнитное поле распространяется в пространстве в виде электромагнитных волн.
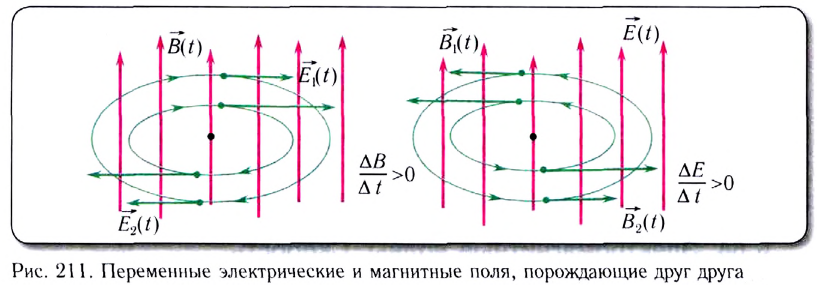
При ускоренном движении зарядов в проводнике создается переменное электрическое поле, которое порождает переменное магнитное поле, а последнее, в свою очередь, вызывает появление вихревого электрического поля уже на большем расстоянии от заряда и т.д. (рис. 212, а, б). Таким образом, попеременно порождая друг друга, в пространстве распространяется электромагнитное поле.
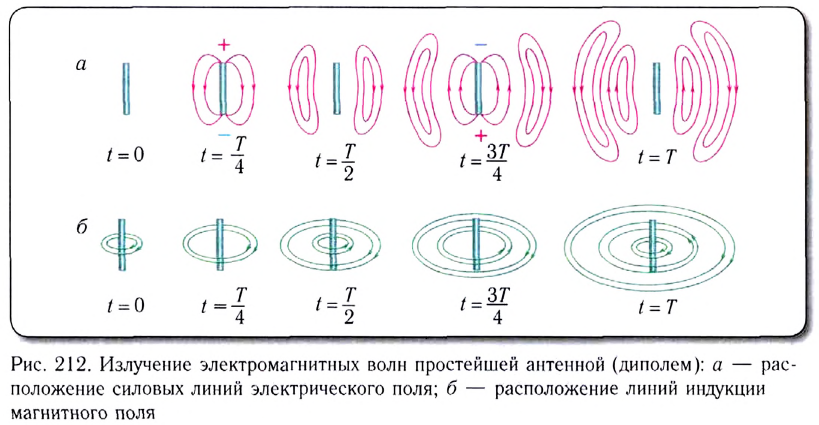
Электромагнитное поле, распространяющееся в вакууме или в какой-либо среде с течением времени с конечной скоростью, называется электромагнитной волной (рис. 213). Электромагнитные волны являются поперечными — вектор скорости  вектор напряженности
вектор напряженности  электрического поля и вектор индукции
электрического поля и вектор индукции  магнитного поля взаимно перпендикулярны. Этим волнам свойственны все явления, характерные для механических волн (отражение, преломление и т. д.). Но в отличие от механических электромагнитные волны могут распространяться и в вакууме.
магнитного поля взаимно перпендикулярны. Этим волнам свойственны все явления, характерные для механических волн (отражение, преломление и т. д.). Но в отличие от механических электромагнитные волны могут распространяться и в вакууме.
Одним из важнейших результатов теории Максвелла было теоретическое определение скорости электромагнитных волн. Согласно этой теории скорость с электромагнитной волны в вакууме связана с электрической постоянной  и магнитной постоянной
и магнитной постоянной  соотношением
соотношением
Скорость распространения волны с в вакууме является предельной. В веществе скорость распространения меньше с и зависит от его электрических и магнитных свойств.
Экспериментально электромагнитные волны были открыты в 1887 г. немецким физиком Генрихом Рудольфом Герцем. Для их генерации он использовал специальное устройство (рис. 214).
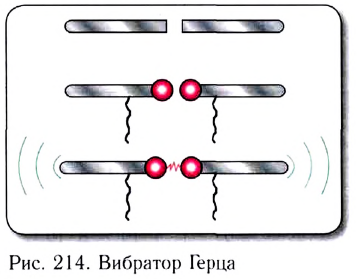
Длина волны, возникавшей при проскакивании искры между электродами устройства, была  = 10 м. Это электромагнитное устройство впоследствии
= 10 м. Это электромагнитное устройство впоследствии
получило название вибратора Герца.
Герц считал, что такие волны невозможно использовать для передачи информации. Однако 7 мая 1905 г. русский ученый Александр Степанович Попов осуществил первую в мире передачу информации электромагнитными волнами — радиопередачу и положил начало эры радиовещания.
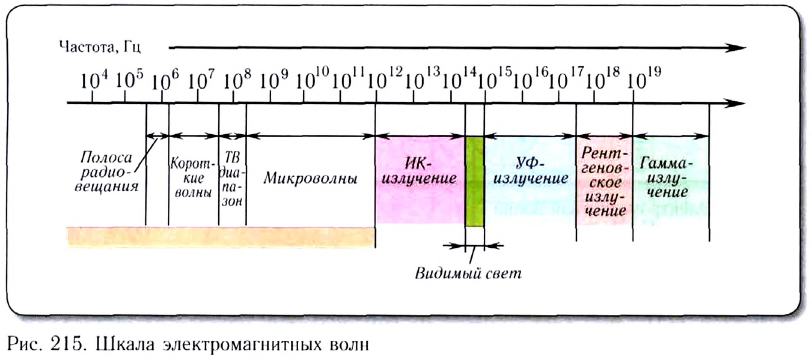
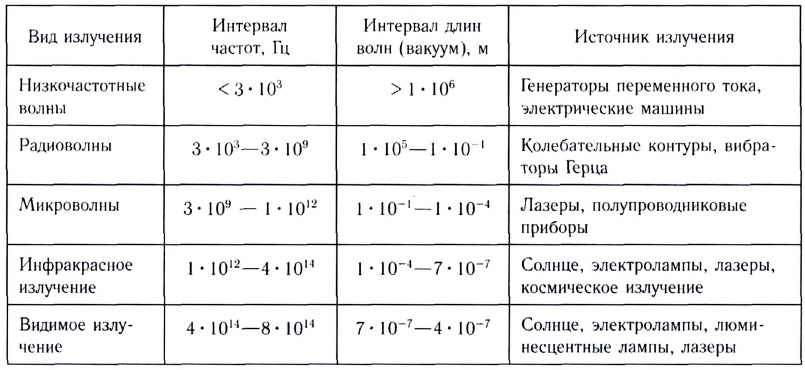
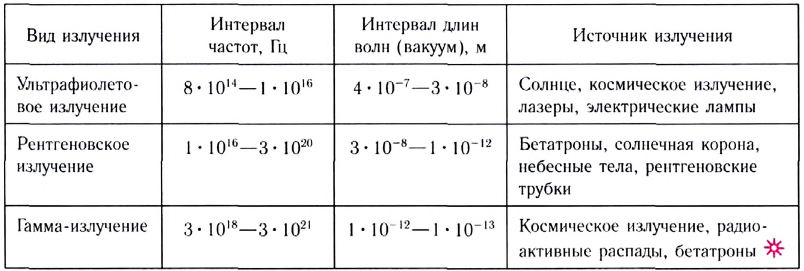
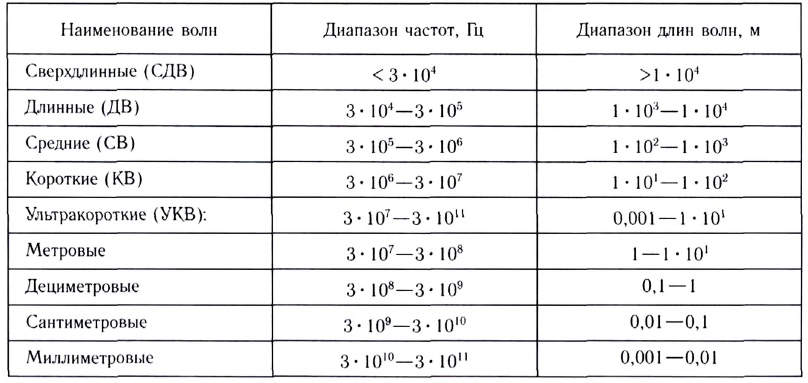
Свойства электромагнитных волн очень сильно зависят от их частоты. Спектр электромагнитного излучения удобно изображать в виде шкалы электромагнитных волн, приведенной на рисунке 215, а их классификация в зависимости от частот (длин волн) дается в таблице 8.
Таблица 8
Классификация электромагнитных волн
В настоящее время электромагнитные волны находят широкое применение в науке и технике:
- плавка и закалка металлов в электротехнической промышленности, изготовление постоянных магнитов (низкочастотные волны);
- телевидение, радиосвязь, радиолокация (радиоволны);
- мобильная связь, радиолокация (микроволны);
- сварка, резка, плавка металлов лазерами, приборы ночного видения (инфракрасное излучение);
- освещение, голография, лазеры (видимое излучение);
- люминесценция в газоразрядных лампах, закаливание живых организмов, лазеры (ультрафиолетовое излучение);
- рентгенотерапия, рентгеноструктурный анализ, лазеры (рентгеновское излучение);
- дефектоскопия, диагностика и терапия в медицине, исследование внутренней структуры атомов, лазеры, военное дело (гамма-излучение).
Изобретение радио. Принципы радиосвязи
Вспомним колебательный контур, состоящий из конденсатора и катушки индуктивности, в котором возникают электромагнитные колебания (рис. 216).
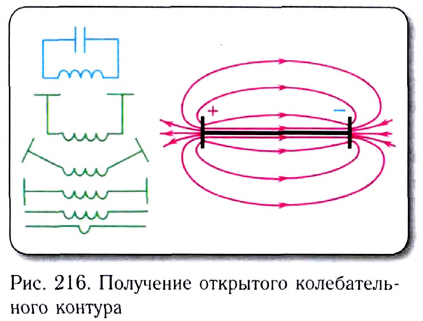
Он называется закрытым, так как в нем происходит лишь обмен энергией между конденсатором, в котором сосредоточена энергия электрического поля, и катушкой, в которой сосредоточена энергия магнитного поля.
Потери энергии при электромагнитных колебаниях в контуре на излучение в окружающее пространство настолько малы, что можно считать: контур не создает электромагнитного излучения. Таким образом, вследствие изменения электрического и магнитного полей в закрытом пространстве внутри конденсатора и катушки закрытый колебательный контур не может служить источником электромагнитного излучения.
Для эффективного излучения контур нужно «открыть», раздвинув обкладки конденсатора, т. е. создать условия для того, чтобы поля «уходили» в пространство (см. рис. 216). Однако мощность электромагнитного излучения в этом случае невелика. И в таком виде его невозможно использовать на практике.
Исследования по передаче информации электромагнитными волнами, проведенные Поповым, показали, что колебательный контур можно использовать для радиосвязи, если одну обкладку конденсатора заземлить, а к другой присоединить вертикально натянутый провод, оставив его верхний конец свободным. Это устройство называется антенной. Антенна — незамкнутый провод или система проводов, подвешенных высоко над поверхностью Земли, по которым проходят переменные токи.
Применение антенны позволяет значительно увеличить мощность электромагнитного излучения. Колебательный контур, снабженный антенной, называется открытым, причем мощность излучения пропорциональна частоте излучения в четвертой степени 
Рассмотрим устройство открытого колебательного контура. Основными его элементами являются конденсатор определенной емкости и катушка индуктивности. Отметим, что любой проводник имеет индуктивность, хоть и очень малую. Любые два проводника, разделенные изолятором, могут рассматриваться как конденсатор, имеющий определенную емкость контура (см. рис. 216). Эта система называется открытым колебательным контуром (вибратором Герца). Радиосвязью называется передача информации электромагнитными волнами, частоты которых охватывают диапазон 
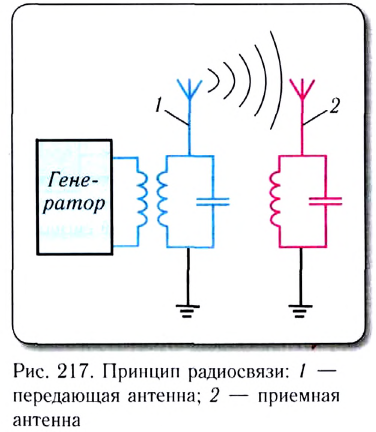
Рассмотрим принцип радиосвязи. В передающей антенне, настроенной в резонанс с генератором (рис. 217), возбуждаются высокочастотные токи, которые, в свою очередь, возбуждают электромагнитные волны в окружающем антенну пространстве. Эти волны, достигая приемной антенны, настроенной в резонанс с генератором, возбуждают токи той же частоты, которые могут быть усилены и использованы.
Токи звуковых частот, а также низкочастотные поля, применяемые в электротехнике, не годятся для радиосвязи по двум причинам:
- электромагнитные волны, возбуждаемые такими токами, обладают очень малой энергией и поэтому не могут распространяться па большие расстояния;
- для эффективного излучения таких волн размеры антенн должны быть очень большими (например, при частоте 1000 Гц длина антенны должна быть 150км).
С учетом этих причин для радиосвязи используются электромагнитные волны высоких частот (от которые обладают достаточной энергией для передачи на большие расстояния и не требуют антенн значительных размеров. Однако электромагнитные волны высокой частоты, преобразованные в звуковые, не могут восприниматься ухом человека. Для передачи информации (речи, музыки) необходимы низкочастотные сигналы с частотами от 16 Гц до 20 000 Гц.
которые обладают достаточной энергией для передачи на большие расстояния и не требуют антенн значительных размеров. Однако электромагнитные волны высокой частоты, преобразованные в звуковые, не могут восприниматься ухом человека. Для передачи информации (речи, музыки) необходимы низкочастотные сигналы с частотами от 16 Гц до 20 000 Гц.
Инженеры нашли выход в специальном «смешивании» высокочастотных и низкочастотных сигналов. Поэтому радиопередачи осуществляются электромагнитными волнами высокой частоты (рис. 218, а), измененными низкочастотными сигналами (рис. 218, б, в). Этот прием получил название модуляции.
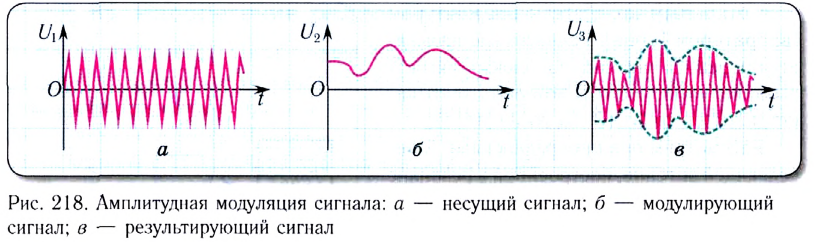
Модуляцией электромагнитной волны называется изменение ее параметров (амплитуды, частоты, фазы) по заданному закону. При этом модулируемые величины изменяются с частотой, намного меньшей частоты волны. Модулируемая волна (высокочастотная) называется несущей волной, а ее частота — несущей частотой.
В зависимости от того, какой параметр подвергается изменению, модуляция подразделяется на амплитудную, частотную и фазовую. Простейшей является амплитудная модуляция (см. рис. 218). При амплитудной модуляции в цепь высокочастотного генератора включается устройство, изменяющее ток в ней с частотой звукового сигнала, несущего информацию. При этом амплитуда несущей волны изменяется в соответствии с частотой низкочастотного сигнала.
Обратный процесс — процесс выделения низкочастотного звукового сигнала из модулированного высокочастотного — называется детектированием.
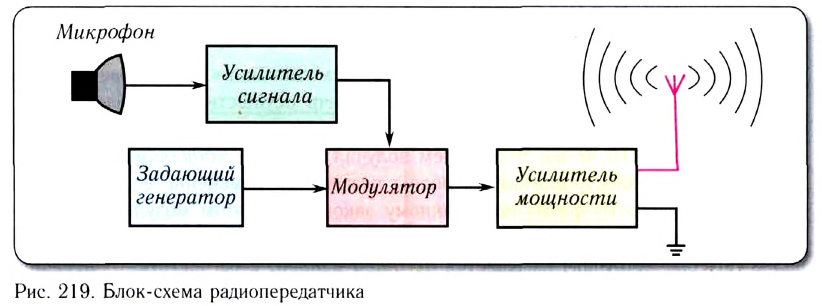
Любая радиосвязь включает работу радиопередатчика и радиоприемника.
Радиопередатчиком называется устройство, передающее информацию электромагнитными волнами радиочастотного диапазона.
Основные элементы радиопередатчика:
- генератор незатухающих колебаний несущей частоты;
- блок модуляции;
- усилитель и передающая антенна.
Блок-схема радиопередатчика приведена на рисунке 219.
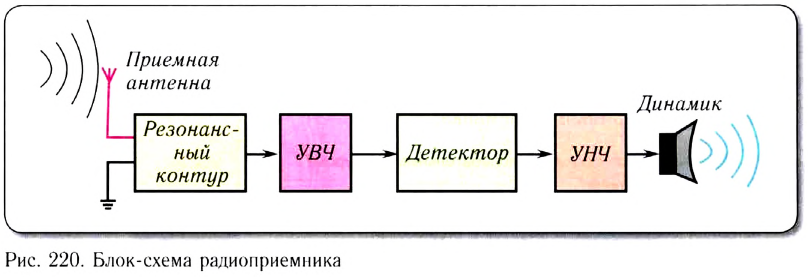
Радиоприемником называется устройство, принимающее информацию, кото рая передается электромагнитными волнами радиочастотного диапазона от радиопередатчика.
Основные элементы радиоприемника:
- приемная антенна с резонансным контуром, преобразующая энергию радио волн в энергию высокочастотных колебаний;
- блок детектирования, который выделяет модулированные колебания, усиливает и демодулирует их;
- воспроизводящее устройство (телефон, громкоговоритель), на которое подается низкочастотный модулирующий сигнал после его усиления.
Блок-схема радиоприемника приведена на рисунке 220.
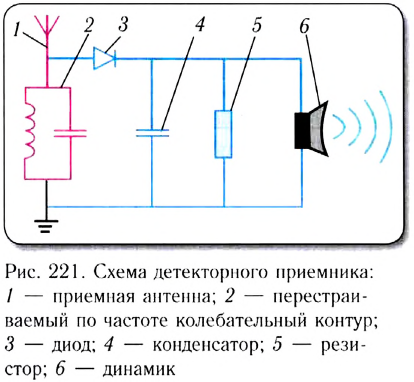
Простейшим радиоприемником является так называемый детекторный приемник (рис. 221). Он состоит из приемной антенны, соединенной с перестраиваемым по частоте колебательным контуром, детектора (полупроводниковый диод — устройство, пропускающее ток только в одном направлении), конденсатора (конденсатор обладает малым сопротивлением для высокочастотного сигнала и большим для низкочастотного, поэтому высокочастотный сигнал идет через конденсатор, а низкочастотный — через динамик) и динамика.
Соединенные параллельно конденсатор емкостью С и резистор сопротивлением R являются сглаживающей цепочкой. Их емкость и сопротивление подбираются таким образом, что  где Т — период высокочастотных колебаний. Через резистор идет ток низкой частоты, форма которого соответствует форме звуковых колебаний, воспринимаемых динамиком приемника.
где Т — период высокочастотных колебаний. Через резистор идет ток низкой частоты, форма которого соответствует форме звуковых колебаний, воспринимаемых динамиком приемника.
- Заказать решение задач по физике
Радиовещание. Принципы телевидения
В современной технике используются радиоволны различных частот. Классификация радиоволн по длинам волн и частотам приведена в таблице 9.
Радиоволны сильно отличаются по своим свойствам. Например, длинные и средние волны хорошо огибают естественные препятствия. Но на средних волнах дальность приема резко отличается днем и ночью. Это связано с тем, что средние волны сильно поглощаются нижним слоем ионосферы 2 и отражаются от более отдаленного слоя 1 (рис. 222, а). Дальность их приема сильно возрастает ночью, так как из-за отсутствия солнечного излучения нижний слой ионосферы 2 пропадает.
Таблица 9
Классификация радиоволн но длинам волн и частотам
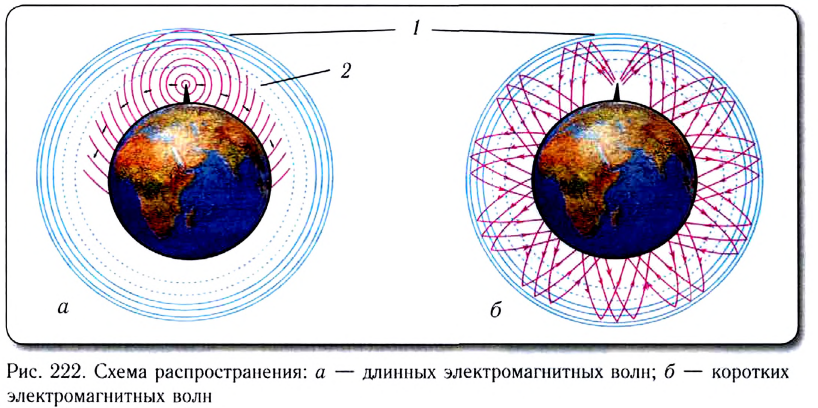
Короткие волны отражаются от ионосферы и, таким образом, многократно отражаясь от поверхности Земли и ионосферы 1 (рис. 222, б), могут распространяться на очень большие расстояния.
Советский радист Э. Кренкель, находясь в северной полярной экспедиции в » У» 30-е годы XX в., с помощью маломощной радиостанции установил связь с австралийскими радистами.
Ультракороткие волны пропускаются ионосферой и не огибают препятствия. Осуществление связи такими волнами возможно только в пределах прямой видимости. Это привело к сооружению гигантских (400—500 м высотой) телевизионных башен, электромагнитные волны с которых Moгут попадать в приемники, находящиеся от них на расстоянии порядка 70—80 км. Только использование спутников на различных орбитах решило вопрос с приемом теле- и радиопередач и телефонных сообщений в любых уголках Земли.
Останкинская телебашня имеет высоту 535 м и позволяет вести прием теле-визионных передач на расстоянии до 120 км от Москвы.
Области использования радиоволн:
- радиовещание — передача речи, музыки на длинных, средних, коротких, ультракоротких волнах метрового диапазона;
- радиосвязь — передача на расстояние телеграфных сигналов и телефонных разговоров на ультракоротких волнах метрового и дециметрового диапазонов;
- телевидение — передача на расстояние изображения (аудио- и видеосигналов) на ультракоротких волнах метрового и дециметрового диапазонов;
- радиолокация — обнаружение и определение положения различных объектов на волнах метровых, дециметровых, сантиметровых и миллиметровых диапазонов;
- радиоастрономия — исследование с помощью радиотелескопов (рис. 223) космических объектов по их ультракоротковолновому излучению.
Для радиолокации используются ультракороткие радиоволны, длина которых лежит в метровом, дециметровом, сантиметровом и миллиметровом диапазонах, вследствие того, что:
- необходимы приемлемые размеры антенн радиолокатора;
- размеры исследуемых объектов больше или сравнимы с длинами радиоволн;
- чем меньше длина волны, тем легче обеспечить формирование достаточно короткого импульса;
- ультразвуковые волны слабо поглощаются атмосферой независимо от погодных условий.
Радар (радиолокатор) — прибор, представляющий собой комбинацию ультракоротковолнового радиопередатчика и приемника. С помощью общей антенны для приема и передачи создастся остронаправленный радиолуч. Излучение осуществляется короткими импульсами длительностью порядка  с. Импульсы отражаются от предметов, позволяя после приема и обработки сигнала установить расстояние до предмета, скорость и направление его движения.
с. Импульсы отражаются от предметов, позволяя после приема и обработки сигнала установить расстояние до предмета, скорость и направление его движения.
Важнейшим преимуществом радиолокации является независимость работы радаров от погодных условий и времени суток.
Радиоволнами осуществляется передача на расстояние изображений предметов. На телевизионной станции производится преобразование передаваемого изображения в последовательность электрических сигналов.
Сигнал изображения модулирует несущие высокочастотные колебания. Эти колебания излучаются антенной в виде радиоволн и передаются на большое расстояние. Они принимаются антенной телевизора. В результате детектирования снова получается электрический сигнал изображения. Он преобразуется в видимое изображение на экране кинескопа телевизора. Вместе с сигналом изображения передаются и звуковые сигналы.
Телевизионные передачи ведутся в диапазоне от 50 Мгц до 230 Мгц, в котором волны распространяются только в пределах прямой видимости.
Мобильная сотовая связь
В течение полутора веков, прошедших с момента изобретения телефона, телефонная связь настолько прочно вошла в быт современного человека, что отсутствие телефона в квартире практически стало исключением. К достоинствам проводных телефонных сетей следует отнести надежность связи и развитую систему абонентских сетей, позволяющую пользователю связаться с абонентом практически в любой стране мира.
Однако «жесткая привязка» абонента к стационарному телефонному аппарату, «ограниченная» к тому же длиной провода телефонной трубки, не позволяла пользователю быть мобильным, т. е, свободно перемещаться в пространстве во время разговоров или между ними.
Во второй половине прошлого века по мере совершенствования техники и технологии стала развиваться идея создания всемирной (глобальной) сети мобильной (сотовой) телефонной связи, позволяющей пользователю иметь доступ к развитой абонентской сети при помощи портативной переносной (мобильной) трубки-телефона значительного (десятки километров) радиуса действия.
Реализация этой идеи позволила бы вывести телефонную связь на новый уровень популярности и доступности с точки зрения пользователя, который имел бы свой индивидуальный телефонный номер и практически неограниченную свободу передвижения (мобильности) во время разговоров или между ними.
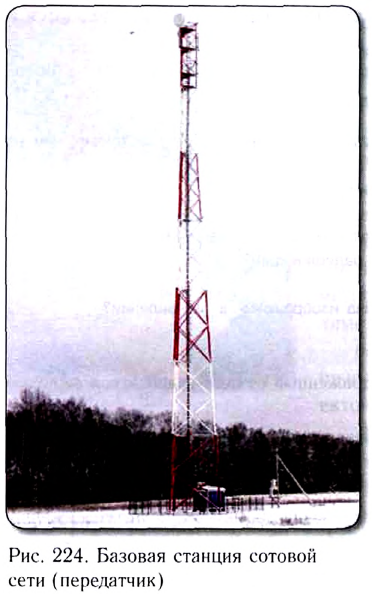
Предлагаемый принцип действия мобильной телефонной связи достаточно прост: при помощи трубки-телефона (мобильного телефона) абонент связывается с ближайшей базовой станцией (передатчиком) сети (рис. 224).
Эта базовая станция, в свою очередь, связывается со следующим передатчиком сети и т. д. по мере требования абонента (рис. 225).
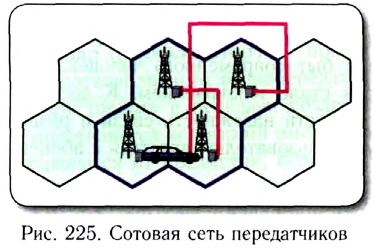
Описанный принцип создания развитой абонентской сети называется сотовым принципом, поскольку по такому же принципу пчелы выстраивают соты внутри улья. При этом каждая созданная ячейка служит основой для создания следующей точно такой же ячейки и т. д.
В силу этого обстоятельства мобильную телефонную связь принято называть также сотовой телефонной связью. При движении абонента (например, на автомобиле) (см. рис. 225) базовые станции самостоятельно следят за ним и «передают» друг другу, что происходит практически без потери качества связи, быстро и совершенно незаметно для пользователя.
Самая простая часть структурной схемы сотовой связи — мобильный (переносной) телефон, состоит из двух частей: собственно «трубки» или ME (Mobile Equipment) и модуля идентификации абонента, или смарт-карты SIM (Subscriber Identity Module), получаемой при заключении контракта с тем или иным оператором.
Каждому сотовому телефону при производстве присваивается собственный номер или международный идентификатор мобильного устройства IMEI (International Mobile Equipment Identity), позволяющий отличить его от второго точно такого же.
В нашей стране используется стандарт сетей второго поколения GSM (Global System for Mobile Communications), который был разработан в 1990 г. Данный стандарт использует рабочую частоту v = 900 МГц, позволяющую значительно улучшить качество связи по сравнению со стандартами первого поколения.
Первый оператор GSM принял абонентов в 1991 году, а уже к началу 1994 г. мировые сети, основанные на данном стандарте, имели 1,3 миллиона абонентов. К концу 1995 г. их число увеличилось до 10 миллионов!
При включении мобильного телефона с активированной смарт-картой он «сам» находит ближайшую базовую станцию соответствующей сотовой сети, после чего весь пакет телефонных услуг данной сети становится доступным абоненту.
Каждый передатчик обеспечивает радиопокрытие в среднем на расстоянии до двух десятков километров от него (рис. 226).
Для рационального использования сотовой сети передатчиков разрабатываются оптимальные схемы их взаиморасположения на местности с учетом ее рельефа.
Важнейшей характеристикой для выбора того или иного оператора сотовой сети является зона покрытия различных населенных пунктов нашей страны базовыми станциями данной сети.

Современные технологии позволяют в метро или других труднодоступных для электромагнитных волн местах устанавливать микробазовые станции или пикосоты (рис. 227), которые позволяют значительно разгружать мобильный трафик на напряженных направлениях.
Основные формулы
Длина волны:

Скорость волны:

Уравнение бегущей волны:

Скорость распространения электромагнитных волн в вакууме:
- Продольные и поперечные волны в физике
- Звуковые волны в физике
- Электрическое поле в физике
- Работа по перемещению заряда в электростатическом поле
- Электромагнитные волны и их свойства
- Магнитные явления в физике
- Магнитный поток
- Волны в физике
ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ
Малые деформации. Тензор малых деформаций
При движении сплошной среды перемещение ее точек может быть таким, при котором изменяются расстояния между ними. Движение среды, удовлетворяющее такому свойству, называется деформацией. Мы интуитивно представляем, что сплошная среда должна оказывать сопротивление деформации, в результате чего в ней появляются внутренние напряжения — реакция на деформацию. В этом случае говорят о напряженно-деформированном состоянии среды. В ряде случаев среда оказывает сопротивление не самим смещениям точек, а скоростям этих смещений. Таким свойством обладают жидкие среды, в которых скорость деформации элементов среды является причиной появления вязких напряжений напряжений внутреннего трения.
Изучение перемещений (или скоростей перемещений) точек в среде позволяет установить характер деформаций (или скоростей деформаций) и на основе некоторых феноменологических положений установить вызванное деформацией напряженное состояние среды. Это определяет значение теории деформаций сплошной среды.
Заметим, что деформация будет отсутствовать, если среда (или какая-либо ее часть) перемещается поступательно как твердое тело или вращается по закону твердого тела вокруг какой-либо оси. Выделение из перемещений точек сплошной среды тех элементов, которые отвечают деформации (а следовательно, и напряжениям), и тех, которые соответствуют смещениям точек как перемещениям твердого тела (и, следовательно, нс связаны с напряженным состоянием), составляет основу теории деформации.
В кинематике сплошной среды термин «точка»может пониматься двояко. Он может относиться и к точке пространства, и к малой порции среды. Будем в дальнейшем иод точкой понимать точку пространства, а малый элемент объема называть частицей или материальной точкой. Другими словами, частица — это малая часть материального континуума, а точка место в пространстве.
Рассмотрим две соседние точки Mq и М упругого тела, находящиеся на расстоянии dr друг от друга (рис. 2.1), положение которых характеризуется радиусами-векторами г и г -<-dr . Это тело подвержено деформации, после которой точки займут новое положение Mq и М[ . Охарактеризуем эти новые положения точек векторами смещения и.
Рис. 2.1. Деформация сплошной среды
Заметим, что идентифицировать материальные точки тела можно двумя способами, а именно: приписывать им текущее значение координат (начальное положение до деформации плюс вектор смещения данной точки) или характеризовать каждую точку тем значением координаты, которое она имела до деформации.
В теории упругости больше используется второй подход, соответствующий лагранжевому описанию кинематики сплошной среды. В этом случае каждой материальной точке частичке среды приписываются постоянные координаты вне зависимости от того, покоится эта частица или перемещается. Значения этих координат определяются положением частицы до начала деформационного процесса, а ее положение в пространстве — текущим значением вектора смешений, определенного в функции времени и начальной координаты частицы. Формально деформация сплошной среды определяется векторным нолем вектора перемещений.
Если мы введем декартову систему координат и будем рассматривать координатные линии как множества точек до процесса деформирования, то при описании процесса деформирования но второму подходу эти линии останутся неизменными и для текущих значений координат определится вектор смещения. При описании по первому подходу, из-за перемещения материальных точек в пространстве и деформирования пространства, ортогональные координатные линии перейдут в некоторую криволинейную координатную систему. Исследование ее метрических свойств позволяет судить о деформационном состоянии материальной среды. Такой подход тоже возможен, но его использование менее традиционно для классических задач теории упругости.
Будем полагать, что смещения являются малыми (что имеет место при деформировании упругих тел), а интересовать нас будут не реальные перемещения точек в пространстве (напомним, что они весьма малы), а изменения расстояний между точками — деформации тела. Несмотря на то что деформации малы, они весьма существенны для определения другой характеристики — напряженного состояния среды, в конечном счете определяющго прочность системы.
Классические задачи теории упругости подразумевают существование некоторого исходного состояния (за него часто принимается ненапряженное состояние), которое затем, после приложения нагрузки, переходит в новое состояние, характеризующее текущее положение точек сплошной среды. Определение деформации основано на сравнении мгновенной формы элемента сплошной среды с его формой в том состоянии, которое принято за начальное.
Следует различать термины «деформирование» (как процесс непрерывной последовательности конфигураций точек сплошной среды) и «деформация», отражающая сравнение начального и текущего состояния точек среды.
Для технических задач упругие деформации материалов (например металлов) могут рассматриваться как малые. Такому случаю отвечает теория малых деформаций сплошной среды. Малость деформации позволяет ограничиться линейными отображениями для перемещений точек из исходного состояния в деформированное.
Будем использовать лагранжевый метод описания кинематики среды, в котором точки идентифицируются своим начальным положением, а их текущее положение характеризуется вектором перемещения. Таким образом, текущее состояние среды характеризуется векторным полем и(г).
При деформации точка Mq сместится в новое положение Mq на величину вектора перемещений и(г), а близкая к ней точка М на величину u(r) + du . Новые положения точек будут определяться радиусами-векторами г + и(г) и г + dr + u(r + dr).
Видно, что если бы вектора смещения точек Mq и М были одинаковыми, то расстояние между точками не изменилось бы — случай отсутствия деформации. Изменение же расстояния между точками связано с переменностью в пространстве вектора смещений. В частности, изменение расстояния между точками Mq и М будет характеризоваться разностью векторов их смещений: du = = u(r + dr) — и <г).Следовательно, деформированное состояние тела можно охарактеризовать векторным полем смещений, а изучение деформации среды сведется к исследованию векторного поля смещений и(г) .
Эта задача аналогично той, которую мы рассматривали при изучении производной от вектора по радиусу-вектору. Можно записать
Входящий в это выражение тензор производной от вектора смещения по радиусу-вектору носит название тензора дисгорсии или тензора градиента движения:
и в общем случае представляет собой несимметрический тензор.
Раскладывая тензор производной (2.2) на симметрическую и ан- тисимметрическую части, представим (2.1) в виде
Первый член правой части (2.3) представляет смещения точек тела как единого целого в поступательном движении. Третий член — антисимметрическая часть определяет ту часть смещения точек, которая происходит от поворота тела как целого на угол ^|rotu| вокруг оси, имеющей такое же направление как и вектор rot и. Эта часть перемещения также не вызывает деформации, расстояния между точками остаются неизменными. И только второй член, связанный с симметрической частью тензора производной, представляет взаимное смещение точек из-за деформации тела.
Таким образом, бесконечно малое перемещение сплошной среды состоит из поступательного перемещения элемента как целого, из вращательного перемещения элемента как целого и из деформации элемента.
Из этих элементов перемещения только деформация, определяемая симметрической частью тензора производной, приводит к изменению расстояний между точками среды и в упругом теле определяет возникающие в нем напряжения. Симметрическая часть тензора производной носит название тензора малых деформаций и имеет вид
Соотношения (2.5), связывающие деформации с перемещениями, называют соотношениями Коши.
Диагональные элементы тензора малых деформаций (2.4) имеют ясный физический смысл. Возьмем точки Мо и Mi так, чтобы они находились на расстоянии dx вдоль оси ох, a dx2 = dx3 = О (рис. 2.2).
Рис. 2.2. Деформация элемента сплошной среды
11осле деформации компоненты расстояния между точками станут равными:
величина рассматриваемого малого отрезка
Аналогичные зависимости могут быть получены и для отрезков, ориентированных по другим координатным направлениям.
Таким образом, диагональные элементы тензора деформаций представляют относительные удлинения после деформации линейных элементов, параллельных осям координат.
Сумма диагональных элементов является первым инвариантом тензора малых деформаций:
Сумма относительных удлинений линейных элементов, параллельных координатным осям, не изменяется для данной точки деформированной среды при любых поворотах координатной системы. Консервативность этой величины наводит на мысль о ее связи с такой характеристикой деформации, которая не зависит от выбора СК. Действительно, возьмем малый элемент объема в форме параллелепипеда с гранями dx, dx2, dx$, параллельными осям координат. Объем элемента dV = dx i dx2 dx3.
Сплошная среда (стр. 1 )
| Из за большого объема этот материал размещен на нескольких страницах: 1 2 3 |
Модуль 4. Сплошная среда
1. , Курс теоретической механики для физиков, Изд-во МГУ, 1974
2. , , «Гидродинамика», Москва, «Наука», 1988
Макроскопическая динамика вещества, или механика сплошных сред строится на основе описания вещества с помощью усредненных характеристик его внутреннего состояния. Методы вычисления усредненных характеристик вещества в состоянии статистического равновесия составляют содержание статистической физики. Динамические уравнения механики сплошной среды являются приближенными следствиями кинетической теории.
Любое вещество состоит из структурных элементов. Структурными элементами являются участки вещества, внутренняя энергия которых существенно превышает их энергию взаимодействия с окружающими участками. Другими словами структурные элементы труднее расщепить, нежели отделить друг от друга. В низкоэнергетических состояниях вещества это обычно молекулы и атомы. Эти структурные элементы мы будем называть частицами.
Макро частицы и поля
Рассмотрим систему с большим числом частиц. Будем считать, что отдельные участки этой системы находятся в состоянии статистического равновесия. При этом не обязательно, чтобы в равновесии находилась вся система целиком. Систему будем называть средой, равновесные участки – макро частицами (такой участок называют еще представительным объемом).
Важно всегда иметь в виду, что макро частица состоит из большого числа частиц (атомов, молекул). Единственное условие — макро частица находится в состоянии статистического равновесия. Для выполнения этого условия в среде должны отсутствовать большие градиенты термодинамических параметров и слишком быстрые процессы изменения этих параметров.
Итак, среда состоит из непрерывной совокупности макро частиц. В масштабах среды макро частица имеет физически бесконечно малую массу Δm, объем ΔV, энергию ΔE, энтропию ΔS и другие характеристики, аддитивно зависящие от числа частиц, из которых состоит макро частица. Такие характеристики будем выделять символом Δ. Все средние характеристики макро частицы, не зависящие от числа входящих в нее частиц, участвуют в определении ее текущего состояния. Это положение центра масс макро частицы r, которое называется положением макро частицы, скорость центра масс v – скорость макро частицы, плотность массы ρ = Δm/ΔV, температура T и т. д.
Макро частица, таким образом, является однородным участком вещества. Все ее средние характеристики неизменны на протяжении ее объема. Состояние среды в целом описывается усредненными параметрами, заданными для всех макро частиц. Так скорости макро частиц во всей среде задаются векторной функцией v(r,t). Эта функция определяет скорость макро частицы, находящейся в момент времени t в положении r. Такие функции принято называть полевыми, или полями. Поля, описывающие состояние среды, могут быть скалярными. Это, например, поле плотности ρ(r,t), поле температуры T(r,t). Поля могут быть векторными. Это поле бесконечно малых смещений u(r,t) = dr макро частиц, поле скоростей v(r,t). Поля могут быть также тензорными. Примерами являются поле напряжений σik(r,t) и поле бесконечно малых деформаций εik(r,t), с которыми мы познакомимся ниже.
В дальнейшем изложении макро частица будет играть роль основного динамического объекта. Уравнения, описывающие динамику макро частицы, записываются в виде уравнений для полевых функций, характеризующих динамику вещества в целом.
Кинематика макро частицы
Начнем с описания бесконечно малого смещения макро частицы (рис. 1), рассматривая ее не как точечный, а как протяженный объект.
Положение произвольной точки макро частицы описывается радиус-вектором r = r0 + r’. Здесь r0 – радиус-вектор некоторой выделенной точки, например центра масс, а r’ = r – r0 – радиус-вектор той же точки относительно центра масс. Таким образом, бесконечно малое смещение dr складывается из смещения центра масс dr0 и относительного смещения dr’: dr = dr0 + dr’.
В свою очередь относительное смещение dr’ можно разложить на поворот и изменение длины вектора r’ (деформацию): dr’ = d(n|r’|) = |r’|dn + nd(|r’|). Здесь n – единичный вектор, направленный вдоль r’.
Последнее слагаемое nid(|r’|), которое определяет бесконечно малую деформацию макро частицы, можно представить в виде
.
Подставив в качестве dxk’ левую часть этого же выражения, получим
(В скобках заметим, что последнее соотношение можно получить также искусственным приемом, умножив левую часть nid|r’| на единицу, представленную в виде 1 = x’knk/|r’|.)
Таким образом, полное смещение частицы dxi может быть записано в форме
(1.0)
В скобках стоит сумма двух тензоров – антисимметричного тензора бесконечно малого поворота χik = eilkdφl и симметричного тензора бесконечно малой деформации εik = ninkd(|r’|)/|r’|.
Получим выражения этих тензоров через производные поля бесконечно малых смещений dr = u(r,t).
Разложим это поле вблизи центра масс макро частицы r0 по степеням r’ = r — r0 , где |r’| = |r — r0| порядка размеров макро частицы. С точностью до первого порядка малости каждую компоненту ui (i = 1, 2, 3) векторной функции u можно записать в виде:
(1.1)
Как и в формуле (1.0) 1-ое слагаемое в правой части (1.1) описывает бесконечно малое поступательное смещение макро частицы в целом – смещение ее центра масс. Второе слагаемое — относительное перемещение частиц, из которых состоит макро частица.
Коэффициенты линейной формы ∂ui/∂xj в правой части (1.1) образуют тензор второго ранга. Как любой тензор 2-ого ранга ∂ui/∂xj можно представить в виде суммы симметричного и кососимметрического тензора
(1.2)
Сравнивая это представление и формулу (1.1) с (1.0), легко увидеть, что симметричная часть является тензором бесконечно малых деформаций
(1.3.1)
а кососимметрический тензор — тензором бесконечно малых вращений
(1.3.2)
Самостоятельно покажите, что из сравнения двух определений тензора вращений следует, что dφ = rotu/2. Другими словами, наличие вращений определяется ротором поля бесконечно малых смещений u(r,t).
Из определения тензора бесконечно малых деформаций εik = ninkd(|r’|)/|r’| следует, что свертка тензора εn = εijninj с направлением n вектора r’ равна относительному бесконечно малому изменению расстояния d(|r’|)/|r’| между частицами среды в этом направлении (посчитайте самостоятельно)
Таким образом, имея тензор деформаций εij(r,t) в каждой точке r среды и любой момент времени t, можно посчитать любую бесконечно малую деформацию εn(r,t) в среде.
Деформация макро частицы может сопровождаться изменением ее объема. Выразим это изменение через тензор деформаций.
Так как макро частица мала, то ее форма может быть произвольной. Предположим, что она имеет форму прямоугольного параллелепипеда со сторонами x1’, x2’, x3’. Тогда объем макро частицы равен ΔV = x1’x2’x3’, а относительное изменение объема
Согласно (1.4) ,
где n(k)- единичный вектор k-ой оси. У этого вектора отлична от нуля лишь k–ая компонента, которая равна единице. Поэтому — k-ая диагональная компонента тензора деформаций.
Итак, относительное бесконечно малое изменение объема макро частицы равно сумме диагональных компонент тензора бесконечно малых деформаций, то есть следу тензора деформаций εij
. (1.5)
Если след εij равен нулю, то деформация не приводит к изменению объема в данной точке среды. Деформация, не приводящая к изменению объема среды, называется сдвигом.
В тензоре εij можно выделить ту его часть, которая определяет сдвиг
(1.6)
В записанном равенстве в круглых скобках стоит тензор, след которого равен нулю. Действительно
.
Последнее слагаемое в (1.6) δijεll/3 представляет собой диагональный тензор с одинаковыми компонентами εll/3 на диагонали. Такой тензор определяет одну и ту же деформацию во всех трех направлениях. Поэтому он отвечает равномерному сжатию (εll 0) вещества.
Соотношение (1,6) говорит о том, что любая деформация может быть разложена на сдвиг и равномерное сжатие (расширение). Сдвигу отвечает тензор деформации с нулевым следом, или девиатор. Равномерной деформации отвечает диагональный тензор деформации δijεll/3 с одинаковыми диагональными компонентами, называемый шаровым.
Вернемся теперь к общему соотношению (1.1) и перепишем его в виде
Первые два слагаемых в (1.7) определяют поступательное ui(r0,t) и вращательное χijxj’ смещения макро частицы, характерные для абсолютно твердого тела. Последнее слагаемое εijxj’ описывает деформацию и отличает макро частицу от абсолютно твердого тела. Наличие деформаций приводит к специфическим отличиям динамических уравнений макро частицы от уравнений движения абсолютно твердого тела, так как в движении начинают участвовать дополнительные внутренние степени свободы, связанные с относительным перемещением частиц.
Разделив (1.7) на бесконечно малый промежуток времени, получим выражение для скорости макро частицы v ≡ u/dt:
(1.8)
Здесь V0 — поступательная скорость макро частицы (скорость центра масс), Ω — угловая скорость вращения, а так называемый тензор скоростей деформаций.
Так как vi(r,t) — поле скоростей среды, то ∂vi/∂xk — градиент этого поля. Следовательно, тензор скоростей деформаций есть симметричная часть градиента поля скоростей. Кососимметричной частью градиента поля скоростей является тензор . Он определяет угловую скорость вращения макро частицы так, что (покажите!)
Другими словами, ротор поля скоростей описывает угловую скорость вращения макро частицы, находящейся в данной точке среды.
Учитывая определение vik и соотношение (1.5), получим
.
http://pandia.ru/text/78/334/1765.php
1. Упругие волны
1.1. Упругие продольные и поперечные волны
1.2. Характеристики бегущих волн
1.2.1. Длина волны
1.2.2. Фазовая скорость волны
1.2.3. Фазовая скорость различна для разных сред
1.2.4. Фронт волны. Волновая поверхность
1.2.5. Уравнение бегущей волны
1.2.6. Волновое уравнение
1.2.7. Скорость и ускорение колеблющейся точки. Относительное смещение точек среды
1.3. Энергия упругих волн
1.4. Принцип суперпозиции волн. Групповая скорость
1.5. Интерференция волн. Стоячие волны
2. Звуковые волны
3. Электромагнитные волны
Как происходит распространение колебаний? Необходима среда для передачи колебаний или они могут передаваться без нее? Как звук от звучащего камертона доходит до слушателя? Каким образом быстропеременный ток в антенне радиопередатчика вызывает появление тока в антенне приемника? Как свет от далеких звезд достигает нашего глаза? Для рассмотрения подобного рода явлений необходимо ввести новое физическое понятие – волна. Волновые процессы представляют общий класс явлений, несмотря на их разную природу.
Процесс распространения колебаний в пространстве называется волной.
Волны, образованные внешним воздействием, приложенным к упругой среде, называются бегущими волнами: они “бегут” от создающего их источника. Важное свойство бегущих волн заключается в том, что они переносят энергию и импульс. Если внешняя сила совершает гармонические колебания, то вызванные ею волны называются гармоническими бегущими волнами.
Волновой процесс обусловлен наличием связей между отдельными частями системы, в зависимости от которых, мы имеем упругую волну той или иной природы.
1. Упругие волны
1. Упругими или механическими волнами называются механические возмущения (деформации), распространяющиеся в упругой среде.
Деформации в теле или среде называются упругими, если они полностью исчезают после прекращения внешних воздействий.
Тела, которые воздействуют на среду, вызывая колебания, называются источниками волн. Распространение упругих волн не связано с переносом вещества, но волны переносят энергию, которой обеспечивает волновой процесс источник колебаний.
2. Среда называется однородной, если ее физические свойства, рассматриваемые в данной задаче, не изменяются от точки к точке.
Среда называется изотропной, если ее физические свойства, рассматриваемые в задаче, одинаковы по всем направлениям.
Среда называется линейной, если между величинами, характеризующими внешнее воздействие на среду, которое и вызывает ее изменение, существует прямо пропорциональная связь. Например, выполнение закона Гука означает, что среда линейна по своим механическим свойствам.
1.1. Упругие продольные и поперечные волны
Все волны делятся на продольные и поперечные.
Поперечные волны – упругие волны, при распространении которых частицы среды совершают колебания в направлении, перпендикулярном направлению распространения волны.
Продольные волны – упругие волны, при распространении которых частицы среды совершают колебания вдоль направления распространения волны.
Поперечные упругие волны возникают только в твердых телах, в которых возможны упругие деформации сдвига. Продольные волны могут распространяться в жидкостях или газах, где возможны объемные деформации среды, или в твердых телах, где возникают деформации удлинения или сжатия. Исключение составляют поперечные поверхностные волны. Простые продольные колебания – это процесс распространения в пространстве областей сжатий и растяжений среды. Сжатия и растяжения среды образуются при колебаниях ее точек (частиц) около своих положений равновесия.
1.2. Характеристики бегущих волн
1.2.1. Длина волны
Минимальное расстояние, на которое распространяется волна за время, равное периоду колебания точки среды около положения равновесия, называется длиной волны.
Длиной волны ![]() называется наименьшее расстояние между двумя точками среды, совершающими колебания в фазе (т.е. разность их фаз равна
называется наименьшее расстояние между двумя точками среды, совершающими колебания в фазе (т.е. разность их фаз равна ![]() ).
).
Если точки разделены расстоянием ![]() , их колебания происходят в противофазе.
, их колебания происходят в противофазе.
1.2.2. Фазовая скорость волны
Из повседневного опыта известно, что бегущие по воде волны распространяются с постоянной скоростью, пока свойства среды, например, глубина воды, не меняется, что говорит о том, что скорость распространения волнового процесса в пространстве остается постоянной. В случае гармонических бегущих волн (см. определение выше) эта скорость называется фазовой.
Фазовая скорость ![]() — это скорость распространения данной фазы колебаний, т.е. скорость волны.
— это скорость распространения данной фазы колебаний, т.е. скорость волны.
Связь длины волны ![]() , фазовой скорости
, фазовой скорости ![]() и периода колебаний Т задается соотношением:
и периода колебаний Т задается соотношением:
![]() .
.
Учитывая, что ![]() , где
, где ![]() — линейная частота волны,
— линейная частота волны, ![]() — период, а циклическая частота волны
— период, а циклическая частота волны ![]() , получим разные формулы для фазовой скорости:
, получим разные формулы для фазовой скорости:
![]() .
.
Для волнового процесса характерна периодичность по времени и по пространству.
Т – период колебаний точек среды. Роль пространственного периода играет длина волны ![]() . Соотношение между периодом и циклической частотой задается формулой:
. Соотношение между периодом и циклической частотой задается формулой: ![]() . Аналогичное соотношение можно записать для длины волны и величиной k, называемой волновым числом:
. Аналогичное соотношение можно записать для длины волны и величиной k, называемой волновым числом: ![]() .
.
Таким образом. Можно добавить еще одно уравнение для фазовой скорости:
![]() .
.
1.2.3. Фазовая скорость различна для разных сред
В случае упругих поперечных волн (в твердом теле) фазовая скорость равна:
 ,
,
где ![]() — модуль сдвига среды,
— модуль сдвига среды, ![]() -ее плотность в невозбужденном состоянии (т.е. когда в этой среде не распространяется упругая волна).
-ее плотность в невозбужденном состоянии (т.е. когда в этой среде не распространяется упругая волна).
Фазовая скорость упругих продольных волн в твердом теле равна
 ,
,
где Е — модуль Юнга, ![]() — плотность невозмущенной среды (твердого тела до момента распространения по нему волны).
— плотность невозмущенной среды (твердого тела до момента распространения по нему волны).
Фазовая скорость продольных волн в жидкости и газе определяется соотношением:  ,
,
где К – модуль объемной упругости среды – величина, характеризующая способность среды сопротивляться изменению ее объема, ![]() — плотность невозмущенной среды.
— плотность невозмущенной среды.
Фазовая скорость продольных волн в идеальном газе задается формулой:  ,
,
 — показатель адиабаты,
— показатель адиабаты,![]() — молярная масса, Т – абсолютная температура, R – универсальная газовая постоянная. Фазовая скорость в газе зависит от сорта газа (
— молярная масса, Т – абсолютная температура, R – универсальная газовая постоянная. Фазовая скорость в газе зависит от сорта газа (![]() ) и от его термодинамического состояния (Т).
) и от его термодинамического состояния (Т).
1.2.4. Фронт волны. Волновая поверхность
При прохождении волны по среде ее точки вовлекаются в колебательный процесс последовательно друг за другом.
Геометрическое место точек, до которого к некоторому моменту времени дошел колебательный процесс, называется волновым фронтом.
Геометрическое место точек, колеблющихся в фазе, называется волновой поверхностью.
Волновой фронт – частный случай волновой поверхности. Волновой фронт все время перемещается. Волновые поверхности остаются неподвижными. Они проходят через положения равновесия частиц среды, которые колеблются в одинаковой фазе.
При описании распространения волн широко используют понятие луча. Направления, в которых распространяются колебания, называются лучами. В изотропной среде (см. определение выше) лучи перпендикулярны волновым поверхностям (фронту) и имеют вид прямых линий. В анизотропной среде, а также при дифракции волн, лучи могут искривляться.
Форма волнового фронта определяет вид волны: сферические (от точечного источника в изотропной среде), эллиптические (в анизотропной среде), цилиндрические (от протяженных источников), плоские и другие. На достаточно большом расстоянии от источника небольшой участок любого фронта можно считать плоским.
Если известно положение фронта волны в некоторый момент времени и скорость волны ![]() , то его положение в последующий момент времени можно определить на основе принципа Гюйгенса. Согласно этому принципу все точки поверхности волнового фронта являются источниками вторичных волн. Искомое положение волнового фронта совпадает с поверхностью, огибающей фронты вторичных волн.
, то его положение в последующий момент времени можно определить на основе принципа Гюйгенса. Согласно этому принципу все точки поверхности волнового фронта являются источниками вторичных волн. Искомое положение волнового фронта совпадает с поверхностью, огибающей фронты вторичных волн.
1.2.5. Уравнение бегущей волны
Уравнением упругой волны называется зависимость от координат и времени скалярных или векторных величин, характеризующих колебания среды при прохождении по ней волны.
Так, для волн в твердом теле такой величиной является смещение от положения равновесия любой точки тела в произвольный момент времени. Для характеристики продольных волн в жидкости или газе используют понятие избыточного давления. Избыточное давление равно разности между давлением в данный момент времени, когда по среде проходит волна, и равновесным, когда возмущений в среде нет.
Получим уравнение бегущей волны в одномерном пространстве, которое предполагаем изотропным и однородным (см. определения выше). Кроме того, силы сопротивления в среде считаем пренебрежимо малыми (т.е. нет затухания колебаний). Пусть точка О — центр (источник) колебаний, она колеблется по закону:
![]() ,
,
где ![]() — смещение точки О от положения равновесия,
— смещение точки О от положения равновесия, ![]() — частота, А – амплитуда колебаний. Часы или секундомер №1 включаются сразу, как только начинаются колебаний точки О, и отсчитывают время t (Рисунок 2.1.1). Ось ОУ совпадает с направлением распространения волны.
— частота, А – амплитуда колебаний. Часы или секундомер №1 включаются сразу, как только начинаются колебаний точки О, и отсчитывают время t (Рисунок 2.1.1). Ось ОУ совпадает с направлением распространения волны.
Через промежуток времени ![]() процесс колебаний дойдет до точки В, и она будет колебаться по закону:
процесс колебаний дойдет до точки В, и она будет колебаться по закону: ![]() .
.
Рисунок 2.1.1.
Амплитуда колебаний в случае отсутствия затухания процесса будет такой же как и амплитуда точки О. Часы или секундомер №2 включаются тогда, когда колебательный процесс дойдет до точки В (т.е. когда начинает колебаться точка В), и отсчитывают время ![]() . Моменты времени t и
. Моменты времени t и ![]() связаны между собой соотношением
связаны между собой соотношением ![]() или
или ![]() . Расстояние между точками О и В обозначим
. Расстояние между точками О и В обозначим ![]() . Фазовая скорость волны равна
. Фазовая скорость волны равна ![]() , тогда
, тогда  . Учитывая соотношения для
. Учитывая соотношения для ![]() и
и ![]() и формулы
и формулы ![]() и
и ![]() , можно записать уравнение колебаний точки В в разных видах:
, можно записать уравнение колебаний точки В в разных видах:
 .
.
Аналогично уравнению колебаний точки В запишем уравнение колебаний любой точки среды, расположенной на расстоянии y от источника колебаний:
![]() ,
,
где ![]() — волновое число (см. определение выше).
— волновое число (см. определение выше).
Это уравнение и есть уравнение для смещения ![]() любой точки пространства в любой момент времени, т.е. уравнение бегущей волны, где А – амплитуда, величина
любой точки пространства в любой момент времени, т.е. уравнение бегущей волны, где А – амплитуда, величина ![]() — фаза волны, которая в отличии от фазы колебаний зависит и от времени “t”, и от расстояния “y” колеблющейся точки от источника колебаний.
— фаза волны, которая в отличии от фазы колебаний зависит и от времени “t”, и от расстояния “y” колеблющейся точки от источника колебаний.
Вернемся к разделению волн по форме фронта волны и к понятию луча, как направления распространения колебательного процесса. Учтем, что в изотропной среде лучи перпендикулярны фронту и имеют вид прямых линий. Тогда уравнение бегущей волны, полученное выше, есть уравнение плоской бегущей волны, т.е. когда фронт волны – плоскость.
Уравнение плоской отраженной волны в одномерном пространстве легко получить, если представить ее как бегущую волну в отрицательном направлении оси ОУ, что приведет к замене в уравнении бегущей волны координаты “y” на “-y”:
![]() .
.
Упругая волна называется синусоидальной или гармонической, если соответствующие ей колебания частиц среды являются гармоническими. Так, рассмотренные выше бегущая и отраженная волны являются гармоническими волнами.
1.2.6. Волновое уравнение
Когда мы рассматривали колебания, то для любой колебательной системы получали дифференциальное уравнение, для которого соответствующее уравнение колебаний являлось решением. Аналогично уравнение бегущей и отраженной волны являются решениями дифференциального уравнения второго порядка в частных производных, называемого волновым уравнением и имеющего вид:
 , где
, где ![]() — фазовая скорость волны.
— фазовая скорость волны.
Уравнения бегущей и отраженной волн и волновое уравнение представлены для случая одного измерения, т.е. распространения волны вдоль оси ОУ. В волновое уравнение входят вторые частные производные по времени и координате от смещения потому, что ![]() есть функция двух переменных t и y.
есть функция двух переменных t и y.
1.2.7. Скорость и ускорение колеблющейся точки. Относительное смещение точек среды
Если смещение любой точки среды с координатой y в момент времени t задано уравнением:
![]() ,
,
то скорость этой точки есть величина ![]() , а ускорение —
, а ускорение —  :
:
![]() ,
, 
1.3. Энергия упругих волн
В среде распространяется плоская упругая волна и переносит энергию, величина которой в объеме ![]() равна:
равна: ![]() , где
, где ![]() — объемная плотность среды.
— объемная плотность среды.
Если выбранный объем записать как ![]() , где S – площадь его поперечного сечения, а
, где S – площадь его поперечного сечения, а ![]() — его длина, то среднее количество энергии, переносимое волной за единицу времени через поперечное сечение S, называется потоком
— его длина, то среднее количество энергии, переносимое волной за единицу времени через поперечное сечение S, называется потоком ![]() через его поверхность:
через его поверхность:
 .
.
Количество энергии, переносимое волной за единицу времени через единицу площади поверхности, расположенной перпендикулярно направлению распространения волны, называется плотностью потока энергии волны.
Эта величина определяется соотношением:
![]() ,
,
где  -объемная плотность энергии волны,
-объемная плотность энергии волны, ![]() — фазовая скорость волны. Так как фазовая скорость волны
— фазовая скорость волны. Так как фазовая скорость волны ![]() — вектор, направление которого совпадает с направлением распространения волны, то можно величине плотности потока энергии I придать смысл векторной величины:
— вектор, направление которого совпадает с направлением распространения волны, то можно величине плотности потока энергии I придать смысл векторной величины:
![]() .
.
Величина ![]() , вектор плотности энергии волны, впервые была введена Н.А. Умовым в 1984 году и получила название вектора Умова. Подобная величина для электромагнитных волн называется вектором Умова — Пойнтинга.
, вектор плотности энергии волны, впервые была введена Н.А. Умовым в 1984 году и получила название вектора Умова. Подобная величина для электромагнитных волн называется вектором Умова — Пойнтинга.
Интенсивностью волны называется модуль среднего значения вектора Умова  .
.
1.4. Принцип суперпозиции волн. Групповая скорость
Принцип суперпозиции (наложения) волн установлен на опыте. Он состоит в том, что в линейной среде волны от разных источников распространяются независимо, и накладываясь, не изменяют друг друга. Результирующее смещение частицы среды в любой момент времени равно геометрической сумме смещений, которые частица получит, участвуя в каждом из слагаемых волновых процессов.
Согласно принципу суперпозиции накладываться друг на друга без взаимного искажения могут волны любой формы. В результате наложения волн результирующее колебание каждой частицы среды может происходить по любому сложному закону. Такое образование волн называется волновым пакетом. Скорость движения волнового пакета не совпадает со скоростью ни с одной из слагаемых волн. В этом случае говорят о скорости ![]() волнового пакета. Скорость перемещения максимума группы волн (волнового пакета) называется групповой скоростью. Она равна скорости переноса энергии волнового пакета.
волнового пакета. Скорость перемещения максимума группы волн (волнового пакета) называется групповой скоростью. Она равна скорости переноса энергии волнового пакета.
На практике мы всегда имеем дело с группой волн, так как синусоидальных волн, бесконечных в пространстве и во времени, не существует. Любая ограниченная во времени и пространстве синусоидальная волна есть волновой пакет (его называют цуг волны). Групповая скорость такого пакета совпадает с фазовой скоростью бесконечных синусоидальных волн, результатом сложения которых он является.
В общем виде связь между групповой и фазовой скоростями имеет вид:
 .
.
1.5. Интерференция волн. Стоячие волны
1. Интерференцией волн называется явление наложение двух и более волн, при котором в зависимости от соотношения между фазами этих волн происходит устойчивое во времени их взаимное усиление в одних точках пространства и ослабление в других.
В пространстве всегда найдутся такие точки, в которых разность фаз складываемых колебаний равна величине ![]() , где k – целое число, т.е. волны (от разных источников) приходят в такие точки в фазе. В них будет наблюдаться устойчивое, неизменно продолжающееся все время усиление колебаний частиц. Найдутся в пространстве, где распространяется несколько волн, и такие точки, где разность фаз будет равна
, где k – целое число, т.е. волны (от разных источников) приходят в такие точки в фазе. В них будет наблюдаться устойчивое, неизменно продолжающееся все время усиление колебаний частиц. Найдутся в пространстве, где распространяется несколько волн, и такие точки, где разность фаз будет равна ![]() , т.е. волны приходят в эти точки в противофазе. В таких точках пространства будет наблюдаться устойчивое ослабление колебаний частиц.
, т.е. волны приходят в эти точки в противофазе. В таких точках пространства будет наблюдаться устойчивое ослабление колебаний частиц.
Устойчивая интерференционная картина возникает только при наложении таких волн, которые имеют одинаковую частоту, постоянную во времени разность фаз в каждой точке пространства. Волны, удовлетворяющие этим условиям и источники, создающие такие волны, называются когерентными. Плоские синусоидальные волны, частоты которых одинаковы, когерентны всегда.
2. Запишем условия максимумов и минимумов при интерференции. Когерентные точечные источники ![]() и
и ![]() испускают волны по всем направлениям. До точки наблюдения М расстояние от первого источника
испускают волны по всем направлениям. До точки наблюдения М расстояние от первого источника ![]() , а от второго —
, а от второго — ![]() .
.
Колебания точки М под действием волн от двух источников![]() и
и ![]() описываются уравнениями:
описываются уравнениями:
![]() ,
, ![]() . Амплитуда результирующего колебания в точке М определится следующим образом (см. раздел “Сложение колебаний”):
. Амплитуда результирующего колебания в точке М определится следующим образом (см. раздел “Сложение колебаний”):  . Амплитуда колебаний точки М максимальна (
. Амплитуда колебаний точки М максимальна (![]() ), если
), если ![]() , где
, где ![]() Величина
Величина ![]() называется разностью хода двух волн. Условие максимума при интерференции имеет вид:
называется разностью хода двух волн. Условие максимума при интерференции имеет вид: ![]() . Если целое число волн укладывается на разности хода двух волн, то при их сложении наблюдается интерференционный максимум. Амплитуда колебаний точки М минимальна (
. Если целое число волн укладывается на разности хода двух волн, то при их сложении наблюдается интерференционный максимум. Амплитуда колебаний точки М минимальна (![]() ), если
), если ![]() , (
, (![]() ). Условие минимума при интерференции имеет вид:
). Условие минимума при интерференции имеет вид: ![]() . Если нечетное число полуволн укладывается на разности хода двух волн, то при их сложении наблюдается интерференционный минимум. 3. Простейший случай интерференции наблюдается при наложении бегущей и отраженной волн, что приводит к образованию стоячей волны. Уравнения бегущей и отраженной волны имеют вид:
. Если нечетное число полуволн укладывается на разности хода двух волн, то при их сложении наблюдается интерференционный минимум. 3. Простейший случай интерференции наблюдается при наложении бегущей и отраженной волн, что приводит к образованию стоячей волны. Уравнения бегущей и отраженной волны имеют вид: ![]() ,
, ![]() Суммарное смещение
Суммарное смещение ![]() частицы среды, находящейся на расстоянии y от источника колебаний, равно сумме смещений
частицы среды, находящейся на расстоянии y от источника колебаний, равно сумме смещений ![]() и
и ![]() :
: ![]() .
.
Это и есть уравнение стоячей волны. Величина  — амплитуда, а (
— амплитуда, а (![]() ) — фаза стоячей волны. Можно сказать, что частицы в стоячей волне имеют одну фазу колебаний. Амплитуда колебаний частиц в стоячей волне зависит от их координат (расстояний до источника колебаний), но не зависит от времени. Знак модуля поставлен в формуле для амплитуды стоячей волны, потому что амплитуда – величина положительная.
) — фаза стоячей волны. Можно сказать, что частицы в стоячей волне имеют одну фазу колебаний. Амплитуда колебаний частиц в стоячей волне зависит от их координат (расстояний до источника колебаний), но не зависит от времени. Знак модуля поставлен в формуле для амплитуды стоячей волны, потому что амплитуда – величина положительная.
В стоячей волне есть точки, которые все время остаются неподвижными. Такие точки называются узлами смещения, их положение определяется из условия:
 , отсюда следует
, отсюда следует  . Выполнение этого соотношения будет при условии
. Выполнение этого соотношения будет при условии ![]() для
для ![]() Итак, координаты узлов задаются формулой:
Итак, координаты узлов задаются формулой:
![]() .
.
Расстояние между двумя соседними узлами равно ![]() .
.
Точки среды, колеблющиеся с наибольшей амплитудой, называются пучностями стоячей волны, их положение (координаты) определяются соотношением:
![]() .
.
Это уравнение можно получить из условия максимума амплитуды
 , т.е.
, т.е.  . Последнее соотношение выполняется при значениях аргумента
. Последнее соотношение выполняется при значениях аргумента ![]() (
(![]() ).
).
Расстояние между двумя соседними пучностями равно ![]() .
.
4. Изменение фазы волны при ее отражении.
Как отмечалось ранее, стоячая волна образуется при сложении бегущей и отраженной волн. Отраженную волну можно рассматривать как бегущую волну, распространяющуюся в обратном направлении и ее можно получить при отражении бегущей волны от границы двух сред. Для синусоидальных волн это означает, что при отражении от более плотной среды фаза волны скачком изменяется на ![]() радиан, а при отражении от менее плотной среды фаза волны не изменяется. Изменение фазы на
радиан, а при отражении от менее плотной среды фаза волны не изменяется. Изменение фазы на ![]() радиан соответствует появлению дополнительного хода луча, равного
радиан соответствует появлению дополнительного хода луча, равного ![]() .
.
2. Звуковые волны
1. Важным видом продольных волн являются звуковые волны. Так называются волны с частотами 17 – 20000 Гц. Учение о звуке называется акустикой. В акустике изучаются волны, которые распространяются не только в воздухе, но и в любой другой среде. Упругие волны с частотой ниже 17 Гц называются инфразвуком, а с частотой выше 20000 Гц – ультразвуком.
Звуковые волны – упругие колебания, распространяющиеся в виде волнового процесса в газах, жидкостях, твердых телах.
2. Избыточное звуковое давление. Уравнение звуковой волны.
Уравнение упругой волны позволяет вычислить смещение любой точки пространства, по которому проходит волна, в любой момент времени. Но как говорить о смещении частиц воздуха или жидкости от положения равновесия? Звук, распространяясь в жидкости или газе, создает области сжатия и разряжение среды, в которых давление соответственно повышается или понижается по сравнению с давлением невозмущенной среды.
Если ![]() — давление и плотность невозмущенной среды (среды, по которой не проходит волна), а
— давление и плотность невозмущенной среды (среды, по которой не проходит волна), а ![]() — давление и плотность среды при распространении в ней волнового процесса, то величина
— давление и плотность среды при распространении в ней волнового процесса, то величина ![]() называется избыточным давлением. Величина
называется избыточным давлением. Величина ![]() есть максимальное значение избыточное давление (амплитуда избыточного давления).
есть максимальное значение избыточное давление (амплитуда избыточного давления).
Изменение избыточного давления для плоской звуковой волны (т.е. уравнение плоской звуковой волны) имеет вид:
 ,
,
где y – расстояние от источника колебаний точки, избыточное давление в которой мы определяем в момент времени t.
Если ввести величину избыточной плотности ![]() и ее амплитуды
и ее амплитуды ![]() так же, как мы вводили величину избыточного звукового давления, то уравнение плоской звуковой волны можно было бы записать так:
так же, как мы вводили величину избыточного звукового давления, то уравнение плоской звуковой волны можно было бы записать так: ![]() . 3. Объективные и субъективные характеристики звука.
. 3. Объективные и субъективные характеристики звука.
Само слово “звук” отражает два различных, но взаимосвязанных понятия: 1)звук как физическое явление; 2)звук – то восприятие, которое испытывает слуховой аппарат (человеческое ухо) и ощущения, возникающие у него при этом. Соответственно характеристики звука делятся на объективные, которые могут быть измерены физической аппаратурой, и субъективные, определяемые восприятием данного звука человеком.
К объективным (физическим) характеристикам звука относятся характеристики, которые описывают любой волновой процесс: частота, интенсивность и спектральный состав. В таблицу 3 включены сравнительные данные объективных и субъективных характеристик.
Таблица 3.
| Субъективные Характеристики | Объективные характеристики |
| Высота звука | Высота звука определяется частотой волны |
| Тембр (окраска звука) | Тембр звука определяется его спектром |
| Громкость (сила звука) | Сила звука определяется нтенсивностью волны (или квадратом ее амплитуды) |
Остановимся на некоторых определениях.
Частота звука измеряется числом колебаний частиц среды, участвующих в волновом процессе, в 1 секунду.
Интенсивность волны измеряется энергией, переносимой волной в единицу времени через единичную площадь (расположенную перпендикулярно направлению распространению волны).
Спектральный состав (спектр) звука указывает из каких колебаний состоит данный звук и как распределены амплитуды между отдельными его составляющими.
Различают сплошные и линейчатые спектры. Для субъективной оценки громкости используются величины, называемые уровнем силы звука и уровнем громкости. Все акустические величины и их размерности в СИ приведены в приложении.
3. Электромагнитные волны
1. Электромагнитными волнами называются возмущения электромагнитного поля (т.е. переменное электромагнитное поле), распространяющиеся в пространстве.
Утверждение о существовании электромагнитных волн является непосредственным следствием решения системы уравнений Максвелла. Согласно этой теории следует, что переменное электромагнитное поле распространяется в пространстве в виде волн, фазовая скорость которых равна:
где — скорость света в вакууме,
— скорость света в вакууме, ![]() ,
, ![]() — электрическая и магнитная постоянные,
— электрическая и магнитная постоянные, ![]() ,
, ![]() — соответственно диэлектрическая и магнитная проницаемость среды.
— соответственно диэлектрическая и магнитная проницаемость среды.
2. Электромагнитные волны — поперечные волны. Векторы Е и Н поля электромагнитной волны взаимно перпендикулярны друг другу. Вектор скорости волны ![]() и векторы Е и Н образуют правую тройку векторов (Рисунок 2.1.4).
и векторы Е и Н образуют правую тройку векторов (Рисунок 2.1.4).
Для сравнения ориентации тройки векторов ![]() , Е и Н на рисунке приведено расположение осей декартовой системы координат. Такое сопоставление уместно и в дальнейшем будет использовано для определения проекций векторов Е и Н на координатные оси.
, Е и Н на рисунке приведено расположение осей декартовой системы координат. Такое сопоставление уместно и в дальнейшем будет использовано для определения проекций векторов Е и Н на координатные оси.
Рисунок 2.1.4
Взаимно перпендикулярные векторы Е и Н колеблются в одной фазе (их колебания синфазные). Модули этих векторов связаны соотношением:
![]()
которое справедливо для любой бегущей электромагнитной волны независимо от формы ее волновых поверхностей.
3. По форме волновых поверхностей волны могут быть плоские, эллиптические, сферические и т.д..
Монохроматической волной называется электромагнитная волна одной определенной частоты. Монохроматическая волна не ограничена в пространстве и во времени. В каждой точке электромагнитного поля монохроматической волны проекции векторов Е и Н на оси координат совершают гармонические колебания одинаковой частоты ![]() . Например, для плоской монохроматической волны, распространяющейся вдоль положительного направления оси ОУ, как показано на рисунке 2.1.3.,ее уравнение имеет вид:
. Например, для плоской монохроматической волны, распространяющейся вдоль положительного направления оси ОУ, как показано на рисунке 2.1.3.,ее уравнение имеет вид:

Такие волны называются плоско (или линейно) поляризованными волнами.
Плоскость, в которой происходит колебание вектора Е называют плоскостью поляризации линейно поляризованной волны, а плоскость колебаний вектора Н – плоскостью колебаний. Ранее эти названия были обратными (см. [1]).
4. Все сказанное о стоячих волнах в упругих средах относится и к электромагнитным волнам. В этом случае, однако, волна характеризуется не одним вектором, а двумя взаимно перпендикулярными векторами Е и Н.
Стоячая электромагнитная волна состоит из двух стоячих волн — магнитной и электрической, колебания которых сдвинуты по фазе на ![]() .
.
5. Энергия электромагнитных волн. Объемная плотность энергии электромагнитного поля в линейной изотропной среде задается соотношением:  с — скорость света в вакууме.
с — скорость света в вакууме.
В случае плоской линейно поляризованной монохроматической волны, распространяющейся вдоль положительного направления ОY, напряженность электрического поля задается уравнением:
![]()
соответственно объемная плотность энергии этой волны ![]()
Значение объемной плотности энергии волны меняется за период от 0 до ![]() .Среднее за период значение энергии равно:
.Среднее за период значение энергии равно:
 .
.
6. Вектор плотности потока энергии электромагнитной волны называется вектором Умова — Пойнтинга:
![]()
Для линейно поляризованной монохроматической волны вектор Пойнтинга направлен в сторону распространения волны и численно равен: 
Интенсивность электромагнитной волны равна модулю среднего значения вектора Пойнтинга за период его полного колебания:
![]()
Интенсивностью электромагнитной волны называется физическая величина, численно равная энергии, переносимая волной за единицу времени через единицу площади поверхности, расположенной перпендикулярно к направлению распространения волны.
Интенсивность бегущей монохроматической волны: ![]() — фазовая скорость волны,
— фазовая скорость волны, ![]() среднее значение объемной плотности энергии поля волны.
среднее значение объемной плотности энергии поля волны.
Интенсивность света (электромагнитных волн, рассматриваемых в оптике) прямо пропорциональна квадрату амплитуды колебаний вектора напряженности Е поля световой волны.
|
Колебания, при которых изменения физических величин происходят по закону косинуса или синуса (гармоническому закону), наз. гармоническими колебаниями. Например, в случае механических гармонических колебаний:. В этих формулах ω – частота колебания, xm – амплитуда колебания, φ0 и φ0’ – начальные фазы колебания. Приведенные формулы отличаются определением начальной фазы и при φ0’ = φ0 +π/2 полностью совпадают. |
|
| Это простейший вид периодических колебаний. Конкретный вид функции (синус или косинус) зависит от способа выведения системы из положения равновесия. Если выведение происходит толчком (сообщается кинетическая энергия), то при t=0 смещение х=0, следовательно, удобнее пользоваться функцией sin, положив φ0’=0; при отклонении от положения равновесия (сообщается потенциальная энергия) при t=0 смещение х=хm, следовательно, удобнее пользоваться функцией cos и φ0=0. | |
|
Выражение, стоящее под знаком cos или sin, наз. фазой колебания: . Фаза колебания измеряется в радианах и определяет значение смещения (колеблющейся величины) в данный момент времени. |
|
| Амплитуда колебания зависит только от начального отклонения (начальной энергии, сообщенной колебательной системе). | |
| Скорость и ускорение при гармонических колебаниях. | |
|
Согласно определению скорости, скорость – это производная от координаты по времени |
|
| Таким образом, мы видим, что скорость при гармоническом колебательном движении также изменяется по гармоническому закону, но колебания скорости опережают колебания смещения по фазе на π/2. | |
| Величина — максимальная скорость колебательного движения (амплитуда колебаний скорости). | |
|
Следовательно, для скорости при гармоническом колебании имеем: |

|
Согласно определению ускорения, ускорение – это производная от скорости по времени: . .Ускорение при гармоническом колебательном движении также изменяется по гармоническому закону, но колебания ускорения опережают колебания скорости на π/2 и колебания смещения на π (говорят, что колебания происходят в противофазе). |
|
|
Величина — максимальное ускорение (амплитуда колебаний ускорения). Следовательно, для ускорения имеем: |
|
| Из анализа процесса колебательного движения, графиков и соответствующих математических выражений видно, что при прохождении колеблющимся телом положения равновесия (смещение равно нулю) ускорение равно нулю, а скорость тела максимальна (тело проходит положение равновесия по инерции), а при достижении амплитудного значения смещения – скорость равна нулю, а ускорение максимально по модулю (тело меняет направление своего движения). | |
|
Сравним выражения для смещения и ускорения при гармонических колебаниях: и |
|
|
Можно записать: — т.е. вторая производная смещения прямо пропорциональна (с противоположным знаком) смещению. Такое уравнение наз. уравнением гармонического колебания. Эта зависимость выполняется для любого гармонического колебания, независимо от его природы. Поскольку мы нигде не использовали параметров конкретной колебательной системы, то от них может зависеть только циклическая частота. |
|
|
Часто бывает удобно записывать уравнения для колебаний в виде: , где T – период колебания. Тогда, если время выражать в долях периода подсчеты будут упрощаться. Например, если надо найти смещение через 1/8 периода, получим: . Аналогично для скорости и ускорения. |
Источник: https://www.eduspb.com/node/1780
Амплитуда колебаний — определение, характеристика и формулы

Амплитуда колебаний – это максимальное значение отклонения от нулевой точки. В физике данный процесс анализируется в разных разделах.
Он изучается при механических, звуковых и электромагнитных колебаниях. В перечисленных случаях амплитуда измеряется по-разному и по своим законам.
Амплитуда колебаний
Амплитудой колебания называют максимальную отдаленную точку нахождения тела от положения равновесия. В физике она обозначается буквой А и измеряется в метрах.
За амплитудой можно наблюдать на простом примере пружинного маятника.

- В идеальном случае, когда игнорируется сопротивление воздушного пространства и трение пружинного устройства, устройство будет колебаться бесконечно. Описание движения выполняется с помощью функций cos и sin:
- x(t) = A * cos(ωt + φ0) или x(t) = A * sin(ωt + φ0),
- где
- величина А – это амплитуда свободных движений груза на пружине;
- (ωt + φ0) – это фаза свободных колебаний, где ω — это циклическая частота, а φ0 – это начальная фаза, когда t = 0.

В физике указанную формулу называют уравнением гармонических колебаний. Данное уравнение полностью раскрывает процесс, где маятник движется с определенной амплитудой, периодом и частотой.
Период колебаний
- Результаты лабораторных опытов показывают, что циклический период движения груза на пружине напрямую зависит от массы маятника и жесткости пружины, но не зависит от амплитуды движения.
- В физике период обозначают буквой Т и описывают формулами:

Исходя из формул, период колебаний – это механические движения, повторяющиеся через определенный промежуток времени. Простыми словами периодом называют одно полное движение груза.
Частота колебаний
Под частотой колебаний следует понимать количество повторений движения маятника или прохождения волны. В разных разделах физики частота обозначается буквами ν, f или F.
- Данная величина описывается выражением:
- v = n/t – количество колебаний за промежуток времени,
- где
- n – это единица колебаний;
- t – отрезок времени.
В Международной системе измерений частоту измеряют в Гц (Герцах). Она относится к точным измеряемым составляющим колебательного процесса.
Например, наукой установлена частота вращения Солнца вокруг центра Вселенной. Она равна -1035 Гц при одинаковой скорости.
Циклическая частота
В физике циклическая и круговая частота имеют одинаковое значение. Данная величина еще называется угловой частотой.

- Обозначают ее буквой омега. Она равна числу собственных колебательных движений тела за 2π секунд времени:
- ω = 2π/T = 2πν.
Данная величина нашла свое применение в радиотехнике и, исходя из математического расчета, имеет скалярную характеристику. Ее измерения проводят в радианах на секунду. С ее помощью значительно упрощаются расчеты процессов в радиотехнике.
- Например, резонансное значение угловой частоты колебательного контура рассчитывают по формуле:
- WLC = 1/LC.
- Тогда как обычная циклическая резонансная частота выражается:
- VLC = 1/2π*√ LC.
В электрике под угловой частотой следует понимать число полных трансформаций ЭДС или число оборотов радиуса – вектора. Здесь ее обозначают буквой f.
Для определения на графике составляющих колебательного механического процесса или, например, колебания температуры, нужно разобраться в терминах этого процесса.
К ним относят:
- расстояние испытываемого объекта от исходной точки – называют смещением и обозначают х;
- наибольшее отклонение – амплитуда смещения А;
- фаза колебания – определяет состояние колебательной системы в любой момент времени;
- начальная фаза колебательного процесса – когда t = 0, то φ = φ0.

Из графика видно, что значение синуса и косинуса может меняться от -1 до +1. Значит, смещение х может быть равно –А и +А. Движение от –А до +А называют полным колебанием.
Построенный график четко показывает период и частоту колебаний. Стоить отметить, что фаза не воздействует на форму кривой, а только влияет на ее положение в заданный промежуток времени.
Источник: https://nauka.club/fizika/amplituda-kolebaniy.html
Гармонические колебания
Определение 1
Техника и окружающий мир являются примерами того, что существуют такие процессы, которые повторяются через определенные промежутки времени, то есть периодически. Их называют колебательными.
Такие движения относят к явлениям с разной физической природой с подчинением общим закономерностям. Запись колебания тока в электрической цепи и математического маятника производится одним и тем же уравнением. Различная природа колебательных движений позволяет рассматривать их с единой точки зрения, исходя из общности закономерностей.
Определение 2
Механические колебания – это периодические или непериодические изменения физической величины, описывающей механическое движение (скорость, перемещение и так далее).
Когда в заданной среде атомы располагаются очень близко или молекулы испытывают силовое воздействие, наблюдается возбуждение механических колебаний. Это говорит о том, что процесс будет иметь конечную скорость, зависящую от свойств среды, которая распространяется от точки к точке. Так возникают механические волны. Явный пример – звуковые волны в воздухе.
Волновые процессы и колебания разной природы имеют много общего, а их распространение может быть описано аналогичными математическими уравнениями. Это подтверждает единство материального мира.
Гармонические колебания. Определение
В механике предусмотрено движение поступательно, вращательно и с наличием колебаний.
Определение 3
Механические колебания – это движения тел, которые повторяются точно или приблизительно за определенные одинаковые временные промежутки.
Функция x=f(t) объясняет закон движения тела с наличием колебаний. При графическом изображении дается представление о протекании колебательного процесса во времени. Рисунок 2.1.1 наглядно показывает принцип простых колебательных систем груза на пружине или математического маятника.

Рисунок 2.1.1. Механические колебательные системы.
Механические колебания подразделяют на свободные и вынужденные.
Определение 4
Действия внутренних сил системы после выведения из равновесия порождают свободные колебания. Примером могут служить колебания груза на пружине или маятника. Если их действие происходит под воздействием внешних сил, тогда их называют вынужденными.
Простейшим видом колебаний являются гармонические колебания, которые описываются уравнением x=xmcos (ωt+φ0), где x– смещение тела от положения равновесия, xm – амплитуда колебаний, ω– циклическая или круговая частота, t – время.
Величина, располагаемая под знаком косинуса, получила название фазы гармонического процесса: φ=ωt+φ0. Если t=0, φ=φ0, тогда φ0 рассматривается в качестве начальной фазы.
Период колебаний Т – это минимальный промежуток времени, через который происходят повторения движения тела. Величина, обратная периоду колебаний, называют частотой колебаний f=1T.
Частота гармонических колебаний показывает их количество, совершаемое за единицу времени, измеряемая в герцах (Г). Связь с циклической частотой ω и периодом T выражается с помощью формулы:
ω=2πf=2πT.
Рисунок 2.1.2 показывает гармонические колебания тел с разными положениями тел. Данный эксперимент наблюдается в специальных условиях при наличии периодических вспышек освещения, называемого стробоскопическим. Для изображения векторов скорости тела в разные моменты времени используют стрелки.

Рисунок 2.1.2. Стробоскопическое изображение гармонических колебаний. Начальная фаза φ0=0. Интервал времени между последовательными положениями тела τ = T12.
На графике 2.1.3. показаны изменения, происходящие во время гармонического процесса, при изменении амплитуды колебаний xm, или периода Т (частоты f), или начальной фазы φ0.

Рисунок 2.1.3. Во всех трех случаях для синих кривых φ0=0: a – красная кривая отличается от синей только большей амплитудой (x’m>xm); b – красная кривая отличается от синей только значением периода (T’=T2); с – красная кривая отличается от синей только значением начальной фазы φ0’=-π2 рад.
Гармонический закон
Если колебания совершаются вдоль прямой Ох, тогда направление вектора скорости аналогично. Определение скорости движения тела υ=υx определяют из выражения υ=∆x∆t; ∆t→0.
Отношение ∆x∆t при ∆t→0 математика трактует как вычисление производной функции x(t) за определенное время t. Обозначение принимает вид dx (t)dt, x'(t) или x˙.
Гармонический закон движения записывается в качестве x=xmcos (ωt+φ0). После вычисления производной формула приобретает вид:
υ=x˙(t)=-ωxmsin (ωt+φ0)=ωxmcos ωt+φ0+π2.
Слагаемое +π2 считают изменением начальной фазы. Достижение максимального значения скорости по модулю υ=ωxmпроизводится при прохождении тела через положение равновесия, то есть x=0. Аналогично определяют ускорение a=ax. Тогда a=∆υ∆t, ∆t→0. Отсюда следует, что a равняется производной функции υ(t) за время t или второй производной функции x(t). Подставив выражения, получим
a=υ˙(t)=x¨(t)=-ω2xmcos (ωt+φ0)=-ω2x(t).
Наличие отрицательного знака указывает на то, что ускорение a(t) имеет противоположный смещению x(t) знак. Исходя из второго закона Ньютона, сила, которая заставляет совершать колебательные движения, направляется в сторону положения равновесия x=0.
На рисунке 2.1.4 изображены графики, где имеются зависимости скорости, ускорения, совершающие гармонические колебания.

Рисунок 2.1.4. Графики координаты x (t), скорости υ (t) и ускорения a (t) тела, совершающего гармонические колебания.

Рисунок 2.1.5. Модель гармонических колебаний.
Если вы заметили ошибку в тексте, пожалуйста, выделите её и нажмите Ctrl+Enter
Источник: https://Zaochnik.com/spravochnik/fizika/mehanicheskie-kolebanija/garmonicheskie-kolebanija/
Механические колебания
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ : гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания — это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания — это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия — это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание. Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела — это величина его наибольшего отклонения от положения равновесия.
Период колебаний — это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний  — это величина, обратная периоду:
— это величина, обратная периоду:  . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
. Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
Гармонические колебания
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой . Положению равновесия отвечает значение . Основная задача механики в данном случае состоит в нахождении функции , дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них — синус и косинус — являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
- Гармонические колебания — это колебания, при которых координата зависит от времени по гармоническому закону:
- (1)
- Выясним смысл входящих в эту формулу величин.
Положительная величина является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
Аргумент косинуса называется фазой колебаний. Величина , равная значению фазы при , называется начальной фазой. Начальная фаза отвечает начальной координате тела: .
Величина называется циклической частотой. Найдём её связь с периодом колебаний и частотой . Одному полному колебанию отвечает приращение фазы, равное радиан: , откуда
- (2)
- (3)
- Измеряется циклическая частота в рад/с (радиан в секунду).
- В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1):
- .
График функции (1), выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1.
Рис. 1. График гармонических колебаний
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае , поэтому можно положить . Мы получаем закон косинуса:
.
График гармонических колебаний в этом случае представлен на рис. 2.
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае , так что можно положить . Получаем закон синуса:
.
График колебаний представлен на рис. 3.
Уравнение гармонических колебаний
- Вернёмся к общему гармоническому закону (1). Дифференцируем это равенство:
- . (4)
- Теперь дифференцируем полученное равенство (4):
- . (5)
- Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем :
- . (6)
- Это соотношение называется уравнением гармонических колебаний. Его можно переписать и в таком виде:
- . (7)
C математической точки зрения уравнение (7) является дифференциальным уравнением.
Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
-решением уравнения (7) является всякая функция вида (1) с произвольными ;
-никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6), (7) описывают гармонические колебания с циклической частотой и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
Пружинный маятник
Пружинный маятник — это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу , жёсткость пружины равна .
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
Рис. 4. Пружинный маятник
В горизонтальном направлении на груз действует только сила упругости со стороны пружины. Второй закон Ньютона для груза в проекции на ось имеет вид:
. (8)
Если (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и . Наоборот, если , то . Знаки и всё время противоположны, поэтому закон Гука можно записать так:
- Тогда соотношение (8) принимает вид:
- или
- .
- Мы получили уравнение гармонических колебаний вида (6), в котором
- .
- Циклическая частота колебаний пружинного маятника, таким образом, равна:
- . (9)
- Отсюда и из соотношения находим период горизонтальных колебаний пружинного маятника:
- . (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10).
Математический маятник
Математический маятник — это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
Рис. 5. Математический маятник
Найдём период малых колебаний математического маятника. Длина нити равна . Сопротивлением воздуха пренебрегаем.
- Запишем для маятника второй закон Ньютона:
- ,
- и спроектируем его на ось :
- .
Если маятник занимает положение как на рисунке (т. е. ), то:
.
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
- .
- Итак, при любом положении маятника имеем:
- . (11)
Когда маятник покоится в положении равновесия, выполнено равенство . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство . Воспользуемся им в формуле (11):
- ,
- или
- .
- Это — уравнение гармонических колебаний вида (6), в котором
- .
- Следовательно, циклическая частота колебаний математического маятника равна:
- . (12)
- Отсюда период колебаний математического маятника:
- . (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
Свободные и вынужденные колебания
Говорят, что система совершает свободные колебания, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6).
Рис. 6. Затухающие колебания
- Вынужденные колебания — это колебания, совершаемые системой под воздействием внешней силы , периодически изменяющейся во времени (так называемой вынуждающей силы).
- Предположим, что собственная частота колебаний системы равна , а вынуждающая сила зависит от времени по гармоническому закону:
- .
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний.
Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими.
Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7.
Мы видим, что вблизи частоты наступает резонанс — явление возрастания амплитуды вынужденных колебаний.
Резонансная частота приближённо равна собственной частоте колебаний системы: , и это равенство выполняется тем точнее, чем меньше трение в системе.
При отсутствии трения резонансная частота совпадает с собственной частотой колебаний, , а амплитуда колебаний возрастает до бесконечности при .
Источник: https://ege-study.ru/ru/ege/materialy/fizika/mexanicheskie-kolebaniya/
§12. Гармоническое колебательное движение и волны
Решебник Волькенштейн В.С. (1985) — Задача 12. 16
Уравнение колебаний материальной точки массой m = 10 г имеет вид x = 5sin(π/5·t+π/4) см. Найти максимальную силу Fmax, действующую на точку, и полную энергию W колеблющейся точки.
Решебник Волькенштейн В.С. (1985) — Задача 12. 15
Уравнение колебания материальной точки массой m = 16 г имеет вид х = 0,1sin(π/8 · t+π/4). Построить график зависимости от времени t (в пределах одного периода) силы F, действующей на точку. Найти максимальную силу Fmax.
Решебник Волькенштейн В.С. (1985) — Задача 12. 14
Начальная фаза гармонического колебания φ = 0 . При смещении точки от положения равновесия х1 = 2,4 см скорость точки v1 = 3 см/с, а при смещении x2 = 2,8 см ее скорость v2 = 2 см/с. Найти амплитуду А и период Т этого колебания.
Решебник Волькенштейн В.С. (1985) — Задача 12. 13
Написать уравнение гармонического колебательного движения, если максимальное ускорение точки amах = 49,3 см/с2, период колебаний T = 2 с и смещение точки от положения равновесия в начальный момент времени х0 = 25 мм.
Решебник Волькенштейн В.С. (1985) — Задача 12. 12
Точка совершает гармоническое колебание. Период колебаний Т = 2 с, амплитуда А = 50 мм, начальная фаза φ = 0.Найти скорость v точки в момент времени, когда смешение точки от положения равновесия х = 25 мм.
Решебник Волькенштейн В.С. (1985) — Задача 12. 11
Уравнение движения точки дано в виде x = sinπ/6·t. Найти моменты времени t, в которые достигаются максимальная скорость и максимальное ускорение.
Решебник Волькенштейн В.С. (1985) — Задача 12. 10
Уравнение движения точки дано в виде х = 2sin(π/2·t+π/4).Найти период колебаний T, максимальную скорость vmах и максимальное ускорение amаx точки.
Решебник Волькенштейн В.С. (1985) — Задача 12. 9
Амплитуда гармонического колебания A = 5 см, период T = 4 с. Найти максимальную скорость vmax колеблющейся точки и ее максимальное ускорение amах.
Решебник Волькенштейн В.С. (1985) — Задача 12. 8
Через какое время от начала движения точка, совершающая колебательное движение по уравнению х = 7sinπ/2·t, проходит путь от положения равновесия до максимального смещения?
Решебник Волькенштейн В.С. (1985) — Задача 12. 7
Начальная фаза гармонического колебания φ = 0. Через какую долю периода скорость точки будет равна половине ее максимальной скорости?
Источник: https://zzapomni.com/paragrafy/ss12-garmonicheskoe-kolebatelnoe-dvizhenie-i-volny?page=5
смещение положения равновесия точки
смещение положения равновесия точки
Задача 40713
Написать уравнение синусоидального гармонического колебания, если амплитуда скорости 63 см/с, период колебаний 1 с, смещение точки от положения равновесия в начальный момент времени равно нулю. Найти амплитуду ускорения, частоту колебаний.
Задача 40738
Написать уравнение гармонического колебания, совершаемого по закону косинуса, если амплитуда ускорения 50 см/с2, частота колебаний 50 Гц, смещение точки от положения равновесия в начальный момент времени 25 мм. Найти амплитуду скорости.
Задача 40739
Написать уравнение гармонического колебания, совершаемого по закону косинуса, если амплитуда ускорения 50 м/с2, частота колебаний 50 Гц, смещение точки от положения равновесия в начальный момент времени 0,25 мм. Найти амплитуду скорости.
Задача 26216
Написать уравнение гармонических колебаний с амплитудой 50мм, периодом 4с и начальной фазой П/4. Найти смещение точки от положения равновесия при t = 0 и t = 1,5 с.
Задача 26560
Уравнение незатухающих колебаний дано в виде: У = 4 ·10–2cos6πt, м. Найти смещение от положения равновесия точки, находящейся на расстоянии 75 см от источника колебаний через 0,01 с после начала колебаний. Скорость распространения колебаний 340 м/с.
Задача 11103
Напишите уравнение гармонического колебания, если амплитуда скорости vm = 63 см/с, период колебаний Т = 1 с, смещение точки от положения равновесия в начальный момент времени равно нулю. Найдите амплитуду ускорения и частоту колебаний. Постройте график зависимости смещения от времени.
Задача 12666
На каком ближайшем расстоянии от источника колебаний с периодом 45 мс через время, равное половине периода после включения источника смещение точки от положения равновесия равно половине амплитуды? Скорость распространения колебаний равна 158 м/с. Считать, что в момент включения источника все точки находятся в положении равновесия.
Задача 14576
Уравнение незатухающих колебаний х = 4sin(600πt) см. Найти смещение x от положения равновесия точки, находящейся на расстоянии l = 75 см от источника колебаний, для момента времени t = 0,01с после начала колебаний. Скорость распространения колебаний v = 300 м/с.
Задача 14932
Плоская монохроматическая волна распространяется вдоль оси Y. Амплитуда волны А = 0,05 м. Считая, что в начальный момент времени смещение точки Р, находящейся в источнике, максимально, определить смещение от положения равновесия точки М, находящейся на расстоянии у = λ/2 от источника колебаний в момент времени t = T/6.
Задача 15330
Смещение от положения равновесия точки, находящейся на расстоянии 4 см от источника колебаний, в момент времени Т/6 равно половине амплитуды. Найти длину бегущей волны.
Задача 17372
Начальная фаза гармонического колебания ψ = 0. При смещении точки от положения равновесия х1 = 2,4 см скорость точки v1 = 3 см/с, а при смещении х2 = 2,8 см ее скорость v2 = 2 см/с. Найти амплитуду А и период Т этого колебания.
Задача 19324
На каком расстоянии от источника колебаний, совершаемых по закону синуса, в момент времени t = T/2 смещение точки от положения равновесия равно половине амплитуды? Скорость распространения колебаний 340 м/с. Период колебаний 10–3 с.
Задача 19326
Источник плоских волн совершает колебания по закону x = A cos ωt. Через четверть периода после начала колебаний смещение от положения равновесия точки, находящейся на расстоянии 4 см от источника, равно половине амплитуды. Найти длину бегущей волны.
Задача 19327
Источник плоских волн совершает колебания по закону x = A cos ωt. Какова амплитуда колебаний, если смещение от положения равновесия точки, отстоящей от источника на расстоянии λ/12 для момента времени T/4, равно 0,025 м?
Задача 20380
Определить начальную фазу колебаний, которые происходят по закону косинуса, если максимальная скорость равна 16 см/с, период колебаний 1,4 с, а смещение точки от положения равновесия в начальный момент времени составляет 2,84 см.
Источник: http://reshenie-zadach.com.ua/fizika/1/smeshhenie_polozheniya_ravnovesiya_tochki.php
Амплитуда результирующего колебания равна сумме амплитуд слагаемых колебаний
- Синфазные колебания усиливают друг друга!
- Интересно, что энергия суммарного колебательного движения, пропорциональная квадрату амплитуды, не равна сумме энергий каждого колебания по отдельности, ибо
-
2 Пусть j01 — j02 = (2k -1)p, где k = 0, 1, 2,… В этом случае говорят, что колебания происходят в противофазе. Векторная диаграмма выглядит следующим образом
- Если А1 > А2, то результирующее колебание происходит синфазно с первым колебанием. Но амплитуда результирующего колебания уменьшилась:
В этом случае говорят, что колебания ослабляют друг друга. Очевидно, что при А1 = А2 результирующая амплитуда вообще будет равной нулю. Это означает, что тело не будет двигаться вообще. Колебания погасили друг друга.
3 Во всех остальных случаях, когда колебания не будут синфазными или противофазными, мы будем видеть колебания с амплитудой, большей , но меньшей, чем .
Полученные результаты имеют бесчисленное множество применений. Забегая вперед, скажем, что если, например, в определенном месте пространства происходят звуковые колебания под действием двух источников, то результирующая громкость звука может оказаться меньше, чем громкость, создаваемая каждым источником в отдельности.
Если звуки, создаваемые каждым источником в отдельности, имеют одинаковую интенсивность, то при подходящих условиях эти звуки гасят друг друга, и можно сказать, что «звук + звук = молчание».
Возможны также условия, когда два пучка света, падающие на экран, дают не большую, а меньшую освещенность, чем каждый пучок в отдельности; возможен даже случай, когда «свет + свет = темнота». Но об этом позже…
§ 2 Сложение взаимно перпендикулярных колебаний
Рассмотрим сначала случай, когда материальная точка одновременно участвует в двух взаимно перпендикулярных колебаниях, имеющих одну частоту. Проблема заключается в определении траектории точки, которую мы будем в этом случае наблюдать.
Пусть одно колебание происходит по оси ОХ, другое – по OY .
Понятно, что точка описывает плоскую траекторию и уравнения и можно рассматривать как уравнение этой траектории в параметрической форме. Нетрудно видеть, что это — уравнение эллипса, вписанного в прямоугольник со сторонами . Ориентация главных осей эллипса зависит от сдвига фаз . На рисунке показаны частные случаи таких эллипсов:
- Нетрудно показать, то при сдвиге фаз эллипс вырождается в прямую на рисунке б:
- Мы будем видеть колебательное движение точки вдоль прямой, проходящей через начало координат, с амплитудой .
- При получаем траекторию на рисунке в:
- Траекторией будет эллипс, у которого главные оси совпадают с осями координат так, как показано на рисунке г , если
- Покажем это
- Разделив обе части каждого уравнения на А и В соответственно, получаем
- Возведем каждое уравнение в квадрат и сложим почленно:
Сдвиг по фазе определит в этом случае направление движения точки. Оно будет происходить по часовой стрелке, если , и против часовой стрелки, если .
- Если амплитуды колебаний по осям ОХ и OY будут равны А = В, то эллипс преобразуется в окружность радиуса А = В:
- Важно заметить, что любое равномерное движение по окружности радиуса А с угловой скоростью может быть разложено на два взаимно перпендикулярных гармонических колебания с частотой .
- Движение по эллипсу тоже может быть разложено на два взаимно перпендикулярных колебания.
Более сложной получается траектория точки, совершающей колебания во взаимно перпендикулярных направлениях, если частоты колебаний не равны. В частности, если частоты относятся как целые числа, траектория оказывается замкнутой линией. Такая траектория называются фигурой Лиссажу. Ниже приведены примеры фигур Лиссажу для некоторых значений и .
- §3 Сложение колебаний с близкими частотами, происходящими вдоль одной прямой
- Рассмотрим случай сложения двух колебаний одного направления и одинаковой амплитуды, частоты которых и очень мало отличаются друг от друга (
Источник: https://megaobuchalka.ru/5/47822.html
 Готовое решение: Заказ №8366
Готовое решение: Заказ №8366
 Тип работы: Задача
Тип работы: Задача
 Статус: Выполнен (Зачтена преподавателем ВУЗа)
Статус: Выполнен (Зачтена преподавателем ВУЗа)
 Предмет: Физика
Предмет: Физика
 Дата выполнения: 21.08.2020
Дата выполнения: 21.08.2020
 Цена: 227 руб.
Цена: 227 руб.
Чтобы получить решение, напишите мне в WhatsApp, оплатите, и я Вам вышлю файлы.
Кстати, если эта работа не по вашей теме или не по вашим данным, не расстраивайтесь, напишите мне в WhatsApp и закажите у меня новую работу, я смогу выполнить её в срок 1-3 дня!
Описание и исходные данные задания, 50% решения + фотография:
№1 312. Найти смещение от положения равновесия точки, отстоящей от источника колебаний на расстоянии л/12, для момента времени T/6. Амплитуда колебания 0,05 м.
Решение.
Уравнение плоской волны имеет вид: , где – смещение точек среды, отстоящих от источника колебаний на расстоянии , в момент времени ; – амплитуда колебаний; – циклическая частота; – волновое число; – начальная фаза колебаний. Волновое число равно:

- От источника колебаний распространяется волна вдоль прямой линии. Амплитуда A колебаний равна 10 см. Как велико смещение x точки, удалённой от источника на x = 3/4 л, в момент, когда от начала колебаний прошло время t = 0,9T?
- Источник монохроматического света с длиной волны 600 нм движется по направлению к наблюдателю со скоростью 400 м/с. Определить длину волны излучения, которую зарегистрирует спектральный прибор наблюдения.
- Два гармонических колебания, направленных по одной прямой и имеющих одинаковые амплитуды и периоды, складываются в одно колебание той же амплитуды. Найти разность фаз Dф складываемых колебаний. Условие 2 9. Два гармонических колебания, направленных по одной прямой, имеющих одинаковые амплитуды и периоды, складываются в одно колебание той же амплитуды. Найти разность фаз складываемых колебаний.
- Определите разность фаз двух одинаково направленных гармонических колебаний одинаковой частоты и амплитуды, если амплитуда их результирующего колебания равна амплитудам складываемых колебаний.