
В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Eя = Се * Ф * n (1)
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
U = Eя + Iя * ∑R (2)
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
- обмотки якоря
- добавочных полюсов
- обмотки возбуждения (для двигателей с последовательным возбуждением)
Ток якоря Iя
Выразим из формулы 2 ток якоря.

Частота вращения якоря
Из формул 1 и 2 выведем формулу для частоты вращения якоря.

Электромагнитная мощность двигателя
Pэм = Ея Iя (5)
Электромагнитный момент

где: ω = 2*π*f — угловая скорость вращения якоря, Cм — постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя)

Момент на валу двигателя, т.е. полезный момент, где М0 момент холостого хода;
Р2 — полезная мощность двигателя
Определение сопротивления якорной цепи двигателя. Расчет механических характеристик при номинальном напряжении на якоре
Страницы работы
Фрагмент текста работы
Министерство сельского хозяйства Российской Федерации
Красноярский Государственный Аграрный Университет
Кафедра электроснабжения
Контрольная работа № 4
Машины постоянного тока
Вариант № 53
Выполнил: ст. гр. ЭТ-33
Гольцман Ю.В.
Проверил: преподаватель
Мещеряков
А.В.
Красноярск 2004
Контрольная работа № 4
Машины постоянного тока
Вариант № 53
1.
Начертить электрическую схему
соединения обмоток двигателя постоянного тока с параллельным возбуждением.
2.
Приближенно определить
сопротивление якорной цепи двигателя.
3.
Рассчитать рабочие характеристики
по техническим данным двигателя. Начертить графики рабочих характеристик.
4.
По заданному значению пускового
тока или момента определить сопротивление пускового реостата.
5.
Рассчитать естественную
механическую характеристику ![]() и искусственные
и искусственные
(реостатные) механические характеристики при добавочных сопротивлениях,
последовательно включенных в цепь якоря. Начертить графики характеристик.
6.
Рассчитать механические
характеристики при номинальном напряжении на якоре и ослаблении магнитного
потока на 20% и 40%. Начертить графики характеристик.
Технические данные двигателя постоянного тока
|
Номинальные |
Число полюсов
|
Сопротивления |
||||
|
напряжение
|
мощность
|
частота вращения
|
КПД
|
якорной цепи
|
обмотки возбуждения
|
|
|
220 |
22,0 |
1000 |
0,82 |
4 |
0,181 |
77,6 |
Приближенное определение
сопротивления якорной цепи двигателя
Номинальная мощность, потребляемая двигателем из
сети
где
![]() -номинальная механическая мощность на валу
-номинальная механическая мощность на валу
двигателя, кВт
![]() -номинальный КПД, о.е.
-номинальный КПД, о.е.
Суммарные потери
мощности в двигателе при номинальной нагрузке
![]()
Номинальный
ток двигателя

где
![]() -номинальное напряжение, В
-номинальное напряжение, В
Номинальный
ток возбуждения
где
![]() -сопротивление обмотки возбуждения, Ом
-сопротивление обмотки возбуждения, Ом
Номинальный
ток якоря
![]()
Приближенно
считаем, что электрические потери мощности ![]() в
в
якорной цепи двигателя с параллельным возбуждением составляют половину
суммарных потерь мощности в двигателе
![]()
Сопротивление
якорной цепи двигателя

Рабочие характеристики двигателя ![]() , при
, при ![]()
Номинальная угловая
механическая скорость вращения якоря

где ![]() —
—
номинальная частота вращения якоря, об/мин
Произведение конструктивной постоянной машины Се
на номинальный магнитный поток Фн

Угловая механическая скорость вращения якоря при «идеальном»
холостом ходе
Номинальный,
полезный момент на валу
Электрические потери мощности в якорной цепи
двигателя при номинальной нагрузке
![]()
Потери мощности при холостом ходе двигателя
![]()
Потери мощности в обмотке возбуждения при
номинальном токе возбуждения
![]()
Момент холостого
хода двигателя

Электромагнитный
момент
![]()
Ток якоря двигателя
где ![]() при расчётах в системе СИ.
при расчётах в системе СИ.
Угловая
механическая скорость вращения якоря

Частота вращения
якоря

Полезная механическая мощность на валу
![]()
Электрические
потери мощности в якорной цепи
![]()
![]()
Электрическая
мощность, потребляемая двигателем из сети
![]()
Ток, потребляемый двигателем из
сети

КПД двигателя
Результаты расчёта рабочих характеристик
|
|
0 |
0,25 |
0,5 |
0,75 |
1,0 |
1,25 |
|
|
0 |
52,55 |
105,09 |
157,6 |
210,19 |
262,74 |
|
|
14 |
66,66 |
119 |
171,75 |
224 |
276,85 |
|
|
7,44 |
35,16 |
62,88 |
90,59 |
118 |
146 |
|
|
115,33 |
112,68 |
110,04 |
107,39 |
104,74 |
102,09 |
|
|
1101,86 |
1076,58 |
1051,29 |
1026,02 |
1000,74 |
975,46 |
|
|
0 |
5,92 |
11,56 |
16,93 |
22,02 |
26,83 |
|
|
0,01 |
0,224 |
0,716 |
1,485 |
2,533 |
3,859 |
|
|
2,27 |
8,41 |
14,54 |
20,68 |
26,81 |
32,95 |
|
|
10,32 |
34,21 |
66,09 |
93,98 |
121,87 |
149,75 |
|
|
0 |
0,704 |
0,795 |
0,819 |
0,821 |
0,814 |

График зависимостей I, M2 = f (P2)
График зависимости Р1 = f (Р2)
График зависимости h = f (P2
)
График зависимости n = f (P2)
Определение сопротивления пускового реостата
Сопротивление пускового реостата, если задан пусковой
ток якоря ![]()

Механические характеристики двигателя при различных
добавочных сопротивлениях в цепи якоря
Частота вращения «идеального» холостого хода двигателя

Угловая механическая скорость вращения при
номинальном моменте на валу

где ![]() -номинальный
-номинальный
электромагнитный момент двигателя (Нм) при 
Соответствующая
частота вращения якоря
|
|
|
|
|
|
|
104,74 |
70,86 |
36,976 |
|
|
1000,738 |
677,008 |
353,277 |
Механические характеристики при разных добавочных
сопротивлениях в цепи якоря двигателя: 1 – естественная (RЯД=0); 2,3 – искусственные реостатные при RЯД1= 3RЯ и RЯД2= 6RЯ.
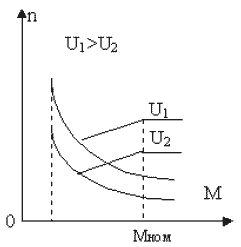
Механические характеристики при ослаблении магнитного
потока двигателя.
При уменьшении магнитного
потока в двигателях параллельного возбуждения увеличивается механическая
угловая скорость вращения якоря при «идеальном» холостом ходе
![]()

где К – коэффициент, учитывающий отношение
магнитного потока после его уменьшения по отношению к номинальному, о.е.
Частота вращения якоря при «идеальном» холстом ходе
Соответствующую второй точке механической
характеристики угловую механическую скорость вращения якоря определим по
формуле механической характеристики при номинальном моменте на валу М2Н

где
![]() -номинальный электромагнитный момент
-номинальный электромагнитный момент
двигателя (Нм) при .
Частота вращения якоря

|
К=1 |
К=0,8 |
К=0,6 |
|
|
|
116 |
145,048 |
193,397 |
|
|
1108,6 |
1385,809 |
1847,746 |
|
|
104,7 |
127,4 |
162,024 |
|
|
1000,738 |
1217,2 |
1547,996 |
Механические характеристики при разных значениях
магнитного потока: 1 – естественная (Ф=ФН, к=1); 2,3 – искусственные
при ослабленном магнитном
Похожие материалы
- Асинхронные машины. Расчет трехфазных асинхронных двигателей
- Инструкция по эксплуатации выключателей ВМП(Э)-10
- Расчет параметров уточнённой Г–образной схемы замещения асинхронного двигателя. Расчет рабочих и пусковых характеристик
Информация о работе
Сопротивление якоря синхронного двигателя при заданной входной мощности Калькулятор
| Search | ||
| Дом | Инженерное дело ↺ | |
| Инженерное дело | Электрические ↺ | |
| Электрические | Машина ↺ | |
| Машина | машины переменного тока ↺ | |
| машины переменного тока | Синхронный двигатель ↺ | |
| Синхронный двигатель | Импеданс ↺ |
|
✖Входная мощность определяется как общая мощность, подаваемая на электродвигатель от источника, который к нему подключен.ⓘ Входная мощность [Pin] |
+10% -10% |
||
|
✖Механическая мощность — это произведение силы на объект и скорости объекта или произведение крутящего момента на валу и угловой скорости вала.ⓘ Механическая мощность [Pm] |
+10% -10% |
||
|
✖Ток якоря двигателя определяется как ток якоря, развиваемый в синхронном двигателе из-за вращения ротора.ⓘ Ток якоря [Ia] |
+10% -10% |
|
✖Сопротивление якоря — это омическое сопротивление медных проводов обмотки плюс сопротивление щеток в электродвигателе.ⓘ Сопротивление якоря синхронного двигателя при заданной входной мощности [Ra] |
⎘ копия |
Сопротивление якоря синхронного двигателя при заданной входной мощности Решение
ШАГ 0: Сводка предварительного расчета
ШАГ 1. Преобразование входов в базовый блок
Входная мощность: 769 Ватт —> 769 Ватт Конверсия не требуется
Механическая мощность: 593 Ватт —> 593 Ватт Конверсия не требуется
Ток якоря: 3.7 Ампер —> 3.7 Ампер Конверсия не требуется
ШАГ 2: Оцените формулу
ШАГ 3: Преобразуйте результат в единицу вывода
12.8560993425858 ом —> Конверсия не требуется
2 Импеданс Калькуляторы
25 Схема синхронного двигателя Калькуляторы
Сопротивление якоря синхронного двигателя при заданной входной мощности формула
Сопротивление якоря = (Входная мощность—Механическая мощность)/(Ток якоря^2)
Ra = (Pin—Pm)/(Ia^2)
Как работает синхронный двигатель?
Обычно синхронный двигатель имеет статор с обмоткой, аналогичной обмотке асинхронного двигателя. Его ротор создает постоянное магнитное поле либо за счет постоянного тока в его обмотках, либо за счет использования постоянных магнитов. Магнитное поле ротора имеет тенденцию выравниваться с вращающимся полем, создаваемым трехфазными переменными токами в статоре.
сопротивление
якоря. Его можно найти в каталоге, либо
непосредственным измерением. Если же
ни то ни другое невозможно, для
определения сопротивления
![]() используем приближенную формулу.
используем приближенную формулу.
Сопротивление якоря находят из
предположения, что половина всех потерь
в двигателе приходится на долю якоря.
Где
 условное сопротивление, которое нужно
условное сопротивление, которое нужно
включить в якорную цепь, чтобы при
неподвижном якоре получить номинальный
ток.
25 Чем отличается механическая характеристика дпт последовательного возбуждения от дпт параллельного возбуждения?
Двигатели с
параллельным возбуждением;(обмотка
якоря включается параллельно обмотке
возбуждения)
Двигатели
последовательного возбуждения;(обмотка
якоря включается последовательно
обмотке возбуждения).
Электродвигатели
постоянного тока с последовательной
обмоткой возбуждения имеют существенное
отличие от двигателей с параллельной
обмоткой возбуждения, магнитный поток
которых практически не зависит от
нагрузки и является величиной постоянной,
что и определяет жесткость ИХ
характеристики. У двителя с последовательной
обмоткой с последовательным воз-
возбуждения буждением обмотка возбуждения
LM включена последовательно с якорем,
вследствие чего через якорь и обмотку
возбуждения протекает один и тот же ток
/в и при изменении нагрузки меняется и
магнитный поток
26 По какой причине дпт последовательного возбуждения не имеют аналитической записи механической характеристики
Рисунок 65 Механическая
характеристика двигателя последовательного
возбуждения
Резко падающая
кривая механической характеристики
обеспечивает ДПТ последовательного
возбуждения устойчивую работу при любой
нагрузке большей 25% от номинальной.
Полученные
уравнения дают лишь общее представление
о характеристиках электропривода с
двигателем последовательного возбуждения,
так как в действительности магнитная
система машины насыщена и кривая
намагничивания весьма далека от прямой.
Поэтому в
практических целях обычно пользуются
универсальными характеристиками для
серии машин
27 Как строятся механические характеристики дпт последовательного возбуждения?
В ДПТ с последовательным
возбуждением поток возбуждения создаётся
током якоря машины, для чего обмотка
возбуждения и якорь двигателя включаются
последовательно относительно источника
питания, как показано на схеме рис. 6.13.

Обычно при токах
![]() магнитная цепь машины не насыщена и
магнитная цепь машины не насыщена и
поток возбуждения пропорционален току
возбуждения![]() При больших токах якоряIя>Iяном
При больших токах якоряIя>Iяном
магнитная цепь машины насыщена, и поток
возбуждения можно считать постоянным.
Подставив в уравнение

где
![]() — сопротивление обмотки возбуждения,
— сопротивление обмотки возбуждения,
значение![]() получим
получим Зная, что
Зная, что![]() получим
получим![]() гдеC1,
гдеC1,
C2,
C3
– постоянные. Поскольку в установившемся
режиме Mэм
=M,
то
 и уравнение механической характеристики
и уравнение механической характеристики
ДПТ с последовательным возбуждением в
диапазоне нагрузокM
<Mном
принимает вид

которому
соответствует гиперболическая кривая,
приведённая на рис. 6.14.
 Способность двигателей последовательного
Способность двигателей последовательного
возбуждения развивать большой
электромагнитный момент, пропорциональный
квадрату тока якоря, обеспечивает этим
двигателям хорошие пусковые свойства,
т. е. большой пусковой момент при
сравнительно малом токе якоря. Поэтому
такие двигатели применяют в грузоподъёмных
и тяговых приводах. Следует обратить
внимание на недопустимость работы
электродвигателей с последовательным
возбуждением в режиме холостого хода
или с нагрузкой менее 25% от номинальной
– это приводит к разносу двигателя.
Регулирование
скорости вращения этих двигателей
возможно теми же способами, что и для
двигателей с независимым возбуждением.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Определение сопротивления обмотки якоря
Рассмотрим, как по основным данным обмотки якоря определить ее сопротивление.
Обозначим длину одного проводника обмотки якоря (в метрах) через /, площадь поперечного сечения одного проводника (в мм2) через д, удельное сопротивление материала проводника через р (сопротивление одного метра проводника при поперечном сечении в 1 мм2),
Сопротивление одного проводника
Каждая параллельная ветвь обмотки содержит N /2а проводников, соединенных последовательно, поэтому сопротивление одной параллельной ветви обмотки будет равно сопротивлению одного проводника, умноженному на число проводников одной параллельной ветви, т. е.
Общее сопротивление обмотки якоря, которое мы обозначим через Ва, будет меньше сопротивления одной параллельной ветви обмотки во столько раз, сколько их имеет обмотка, т. е.
При обмотке, изготовленной из меди (как это обычно и бывает), удельное сопротивление которой равно 1/57, выражение для со-противления принимает следующий вид:
Напряжение между отдельными элементами обмотки якоря
Для того чтобы правильно изолировать обмотку якоря, необходимо знать, какие напряжения действуют между отдельными частями обмотки якоря и между обмоткой якоря и сталью.
Эти напряжения можно определить, пользуясь рис. 1-53, на котором показана часть схемы петлевой обмотки якоря.
Найдем величины напряжений, которые могут возникнуть между следующими элементами обмотки:
соседними секциями в пазу равно напряжению между соседними коллекторными пластинами, к которым присоединены эти секции. Так как расстояние между пластинами невелико (от 0,6 до 1 мм) и коллектор бывает обычно в какой-то мере загрязнен щеточной пылью, то напряжение между пластинами при проектировании машины ограничивают такой величиной, которая не могла бы вызвать электрической дуги между ними. В машинах средней и большой мощности с одновит-ковыми секциями из прямоугольной меди это напряжение не бывает больше 40 в. Секции следует изолировать одну от другой, учитывая рабочее напряжение 40 в. Конечно, изоляция по отношению к этому напряжению должна иметь большой запас.
В машинах малой мощности, в которых секции выполняются из круглой меди и обычно имеют несколько витков (до 30), напряжение между соседними пластинами доходит до 60 в, а в некоторых случаях и до 100 в. На это напряжение с необходимым запасом должна быть рассчитана изоляция проводников. В якорях с такими обмотками витки укладываются в пазы через щели (шлицы), при
= 5, напряжение между проводниками может увеличиться примерно до 300 в, при напряжении между пластинами 60 в.
равно напряжению машины.
Наконец, рассмотрим напряжение, действующее между секцией обмотки якоря и стенками паза. Для его определения предположим, что в одной из секций, например 2, повредилась изоляция, и она оказалась соединенной со сталью якоря. Тогда в тот момент, когда коллекторная пластина, к которой присоединена секция, окажется под положительной щеткой (этот момент и изображен на рис. 1-53), сталь якоря будет присоединена к положительной щетке, и у тех секций, которые в этот момент оказались присоединенными к отрицательной щетке, изоляция от стенок паза также будет находиться под полным напряжением машины.
Для того чтобы эта изоляция не была пробита, она должна быть рассчитана на полное напряжение машины.
Остается еще рассмотреть напряжение, действующее между верхним и нижним слоями секций в лобовой части обмотки якоря. Можно показать, что это напряжение уменьшается по мере удаления от стали якоря. Непосредственно по выходе из паза оно равно полному напряжению машины, по удалении от стали якоря оно уменьшается и у головок обмотки равно нулю.
В лягушечьей обмотке, как было указано ранее, напряжение между слоями обмотки будет разным. При выполнении по рис. 1-47, а напряжение между всеми слоями обмотки будет равно напряжению машины. При выполнении обмотки по рис. 1-47, б и 1-54 напряжения между слоями 1 и 2, 3 и 4 будет равно нулю, а между слоями 2 и 3, а также между головками обмоток со стороны, противоположной коллектору, действует полное напряжение машины.
Источник
7.7. ОДНОЯКОРНЫЕ ПРЕОБРАЗОВАТЕЛИ
Для преобразования переменного тока в постоянный, как известно, используют выпрямители. Преобразование постоянного тока в переменный можно осуществить электромашинными преобразователями. Каскад из двух машин: (асинхронный двигатель переменного тока и генератор постоянного тока) вполне решают эту задачу. Но бывает ситуация, когда необходимо преобразовать постоянный ток низкого напряжения в постоянный ток повышенного напряжения. Делается это в одной комбинированной машине, состоящей из двигателя и генератора постоянного тока с общей магнитной системой. Со стороны низкого напряжения это электродвигатель, а со стороны повышенного напряжения — генератор постоянного тока с независимым возбуждением. В одних и тех же пазах якоря преобразователя заложены самостоятельные обмотки низкого и повышенного напряжения. Концы обмоток присоединены к соответствующему коллектору (рис. 7.7.1), причем обмотка повышенного, напряжения имеет значительно большее число проводников, чем обмотка низкого напряжения. Одноякорные преобразователи широко применяются в авиационной технике, а также в общепромышленных установках, где первичным источником постоянного тока является аккумулятор. Одноякорные преобразователи постоянного тока в трехфазный переменный отличается от рассмотренного тем, что обмотка повышенного напряжения состоит из
трех секций, смещенных друг от друга на 120°. Выводы секционных обмоток припаяны к трем контактным кольцам и с помощью токосъемных щеток переменный ток передается к потребителю.
Машины постоянного тока
Для I в = 0,4 А : 1) I я =14 А. 2) U я = 131,6 В.
Для I в = 0,2 А : 3) I я = 12А. 4) U я = 102,8 В.
Электродвижущую силу генератора определяем по характеристике холостого хода рис.9.12:
а) при I В =0,4 А ЭДС Еa= 140 В;
б) при I В =0,2 А ЭДС Е б = 120 В.
Ток якоря определяем по закону Ома:
a) I я,а =E а /(r н +r я )=140/(9,44+0,6)=14 A;
б) I я,б =E б /(r н +r я )=120/(9,4+0,6) =12 А.
Напряжение генератора меньше ЭДС на падение напряжения в обмотке якоря:
U Дв =U ном – I П r П =U ном – U нмо r П /(r я +r П )=U ном – U ном 9r я /(r я +9r я )=U ном – 9U ном /10=U ном /10
Момент, развиваемый двигателем при пуске, равен
При пуске вхолостую двигатель пойдет в ход и разгонится до частоты вращения, примерно равной частоте вращения идеального холостого хода, так как по мере разбега двигателя вследствие уменьшения тока в пусковом реостате напряжение на обмотке якоря и, следовательно, на обмотке возбуждения будет увеличиваться и к концу разбега будет близко к номинальному.
1) r я =1,0 Ом. 2) r я =0,125 Ом. 3) r п =0,3775 Ом. 4) r п =0,44 Ом.
Потери в обмотке якоря при номинальной нагрузке равны
Сопротивление пускового реостата определяем по закону Ома
r П =U ном /I ном – r я =200/2,5∙200 — 0,0625 = 0,3775 Ом. Ответ: 3.
В каком соотношении находятся ЭДС обмотки якоря двигателя при его работе в точках /, 2, 3, 4 характеристик, изображенных на рис. 9.43? Характеристика, на которой расположена точка 2, является естественной. Указать правильный ответ.
Электродвижущая сила, возникающая в обмотке якоря двигателя,
E=k e Фn=U – I я (r я +r Д ).
Из взаимного расположения характеристик видно, что характеристика, на которой расположена точка 1, соответствует ослабленному магнитному потоку двигателя; характеристика, на которой расположена точка 3,— реостатная (в цепи якоря включен добавочный резистор); характеристика, на которой расположена точка 4, имеем место при пониженном напряжении на обмотке якоря двигателя; например в системе Г—Д:
Е 1 =U ном – I я r я Е 2 =U ном – I я r я =k e Фn 2 E 3 =U ном – I ном( r я + r Д )= k e Фn 3
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.
Постоянный вращающий момент
Как видно из названия — «постоянный вращающий момент» — подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» — эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.
Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Двигатель постоянного тока. Характеристики и регулирование
После предыдущего поста о мотор-редукторе мне пришло несколько вопросов по регулированию двигателя постоянного тока. Так что пора написать очередной пост