Условие задачи:
При трении двух тел, теплоёмкости которых по 800 Дж/К, температура через 1 мин повысилась на 30 К. Найти среднюю мощность при трении.
Задача №5.3.5 из «Сборника задач для подготовки к вступительным экзаменам по физике УГНТУ»
Дано:
(C=800) Дж/К, (tau=1) мин, (Delta T=30) К, (N-?)
Решение задачи:
Среднюю мощность (N) найдём как отношение работы при трении (A) ко времени (tau):
[N = frac{A}{tau }]
Работа (A) равна суммарному изменению внутренней энергии двух тел:
[A = 2Delta W]
Изменение внутренней энергии (Delta W) легко найти по такой формуле (обратите внимание, что в условии дана теплоёмкость, а не удельная теплоёмкость, поэтому формула выглядит именно так):
[Delta W = CDelta T]
Если подставить две последние формулы в первую, то получим:
[N = frac{{2CDelta T}}{tau }]
Переведём время (tau) в систему СИ:
[1;мин = 60;с]
Посчитаем ответ:
[N = frac{{2 cdot 800 cdot 30}}{{60}} = 800;Вт = 0,8;кВт]
Ответ: 0,8 кВт.
Если Вы не поняли решение и у Вас есть какой-то вопрос или Вы нашли ошибку, то смело оставляйте ниже комментарий.
Смотрите также задачи:
5.3.4 С какой скоростью должна лететь свинцовая пуля, чтобы при ударе о препятствие
5.3.6 Найти высоту, на которой потенциальная энергия груза массой 1000 кг равна количеству
5.3.7 Чему равна высота водопада, если температура воды у его основания на 0,05 C больше
![]()
inniden
+15
Решено
10 лет назад
Физика
5 — 9 классы
При трении двух тел, теплоемкость которых по 800 Дж/К температура через 1 мин повысилась на 30К. Найти среднюю мощность при трении.
Смотреть ответ
Ответ
5
(2 оценки)
11
![]()
Galyama
10 лет назад
Светило науки — 6 ответов — 30 раз оказано помощи
cm равно 800, а неc. То есть работа равна теплоёмкость умножить на разность температур. А остальное Вы написали. Тока не забудьте минуты в секунды перевести
(2 оценки)
Остались вопросы?
Задай вопрос
Найди нужный
Новые вопросы по предмету Математика
каково действующее значение напряжения в цепи переменного тока если максимальное значение 141
Человек стоит на весах и держит в руках связку воздушных шариков, наполненных гелием.1. Верёвка с шарами перекинута через блок.2. Человек прост …
В Ш-образную трубку налита вода, и во все три колена вставлены поршни А, В и С.Поршни могут легко скользить в трубках, но щели между трубками и …
На тренировке по перетягиванию каната команда тянет канат, привязанный к столбу, вбитому в землю.На соревнованиях эта же команда встретилась с …
Есть два рычага, которые могут свободно качаться.На каждом из них висят два бруска — один объёмом 1 литр, а второй — объёмом 2 литра, как показ …
<p>При трении двух тел, теплоемкость которых по 800 Дж/К температура через 1 мин повысилась на 30К. Найти среднюю мощность при трении.</p>
Лист 2.
Расскажите о силовом расчете механизма (задача силового расчета, использованный метод и основные уравнения).
Ответ:основной задачей силового расчета является определение реакций в кинематических парах. Для решения этой задачи была численно решена система уравнений, составленная из уравнений движения звеньев и замыкающих уравнений. Для одного положения была сделана проверка с использованием графических методов.
2. Как вы определяли главные векторы и главные моменты инерции для каждого из звеньев рычажного механизма?
Ответ:аналитически – по рассчитанным кинематическим функциям, графически – по векторным уравнениям скоростей и ускорений.
3. В какой последовательности выполнен силовой расчет механизма? Как использовалось условие статической определимости группы звеньев?
Ответ:силовой расчет в графике сделан, начиная с последней группы Ассура.
4. Проанализируйте векторные уравнения сил, использованные при силовом расчете. В чем состояла цель силового анализа и как она была достигнута?
Ответ:Насчет уравнений – см. силовые многоугольники на чертеже. Цель состояла в определении реакций. Они были определены путем решения векторных уравнений.
5. Была ли проведена вами оценка погрешностей вычислений при силовом расчете относительно расчетов, выполненных при определении закона движения механизма под действием заданных сил? Каковы результаты этой оценки.
Ответ:проверка было проведена, погрешность составила 3,2%.
6. В какой последовательности выполнен силовой расчет с учетом сил трения в кинематических парах? От каких параметров зависят силы трения в кинематических парах?
Ответ:сила трения в данном механизме возникает только в поступательной паре. Она зависит от нормальной силы реакции. Эта сила, как и сила трения, определяется заранее из кинематических функций, а затем вводится в матрицу как внешний фактор.
7. Как определить механический коэффициент полезного действия? Как определить среднюю мощность сил трения в механизме?
Ответ:КПД определяем как отношение выходной мощности ко входной. Мощность сил трения определяем как среднюю за период разность между входной и выходной мощностью.
Поясните, как влияет угловое ускорение звеньев первой группы на реакции в кинематических парах входного звена.
Ответ:при одинаковом движущем моменте составляем уравнения моментов относительно центров кинематических пар. В результате имеем зависимости между угловым ускорением и реакциями.
Дата добавления: 2015-01-05 ; просмотров: 14 | Нарушение авторских прав
iSopromat.ru

Силовой расчет механизмов относится к решению первой задачи динамики. Как видно из содержания задач динамики, приведенного выше, первая задача включает в себя две части: изучение сил, действующих на звенья механизма; определение неизвестных сил при заданном законе движения на входе (эта вторая часть и есть задача силового расчета).
В целях дальнейшего понимания терминологии и систематизации материала целесообразно повторить известные из физики и теоретической механики сведения о силах, а также ввести некоторые новые (применяемые в теории механизмов и машин) понятия. С точки зрения решения задач динамики силы (в данном случае под силой понимается обобщенное понятие силового фактора – собственно сила или момент) можно классифицировать следующим образом:
а) по взаимодействию звена механизма с другими объектами. По этому признаку силы подразделяются на внешние и внутренние:
- внешние силы – это силы взаимодействия звена механизма с какими-то телами или полями, не входящими в состав механизма;
- внутренние силы – это силы взаимодействия между звеньями механизма (реакции в кинематических парах);
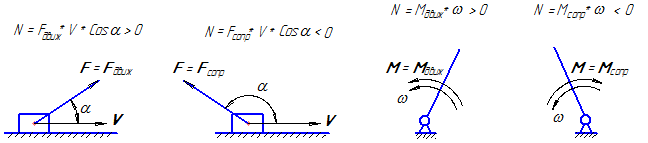
б) по мощности, развиваемой силой. По этому признаку силы делятся на силы движущие и силы сопротивления (рисунок 16):
- движущая сила – это сила, которая помогает движению звена и развивает положительную мощность;
- сила сопротивления препятствует движению звена и развивает отрицательную мощность.
В свою очередь силы сопротивления можно разделить на силы полезного сопротивления и силы вредного сопротивления:
- силы полезного сопротивления – это силы, для преодоления которых и создан механизм. Преодолевая силы полезного сопротивления, механизм создает полезную работу (например, преодолевая сопротивления резанию на станке, добиваются необходимого изменения формы детали; или, преодолевая сопротивление воздуха в компрессоре, сжимают его до требуемого давления и т.д.);
- силы вредного сопротивления – это силы, на преодоление которых затрачивается мощность и эта мощность теряется безвозвратно. Обычно в качестве вредных сил сопротивления выступают силы трения, гидравлического и аэродинамического сопротивлений.
Работа по преодолению этих сил переводится в тепло и рассеивается в пространство, поэтому коэффициент полезного действия любого механизма всегда меньше единицы;
в) силы веса – это силы взаимодействия звеньев механизма с гравитационным полем земли;
г) силы трения – силы, сопротивляющиеся относительному перемещению соприкасающихся поверхностей;
д) силы инерции – силы, возникающие при неравномерном движении звена и сопротивляющиеся его ускорению (замедлению). Сила инерции действует на то тело, которое заставляет ускоряться (замедляться) данное звено. В общем случае при неравномерном движении возникает сила инерции и момент сил инерции:
где
Fин – главный вектор сил инерции, приложенный в центре масс звена;
Mин – главный момент сил инерции;
m – масса звена;
Is – момент инерции звена относительно центра масс;
as – ускорение центра масс звена;
e – угловое ускорение звена.
Знак минус в формулах показывает, что сила инерции направлена противоположно ускорению центра масс звена, а момент сил инерции направлен противоположно угловому ускорению звена. Знак силы или момента учитывается только при установлении истинного направления силы или момента на расчетной схеме, а в аналитических вычислениях используется абсолютные их значения.
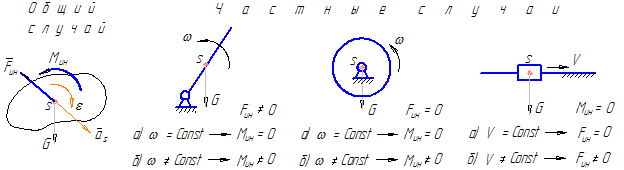
При силовом анализе механизмов могут встретиться различные случаи, когда один или оба силовых инерционных фактора могут иметь нулевое значение. На рисунке 17, приведенном выше, показаны некоторые случаи возникновения сил и моментов сил инерции при движении звеньев механизма.
Непосредственно силовой расчет сводится к определению неизвестных сил, действующих на звенья механизма. Как известно из теоретической механики для определения неизвестных сил используются уравнения статики.
Механизм же является неравновесной системой, т.к. большинство его звеньев имеет неравномерное движение, а точки, принадлежащие этим звеньям, движутся по сложным криволинейным траекториям (напомним: состояние равновесия – это состояние покоя или прямолинейного равномерного движения).
Поэтому для решения поставленной задачи применяется метод кинетостатики.
Метод кинетостатики основан на принципе Даламбера: если ко всем внешним силам, действующим на звенья механизма, добавить силы инерции и моменты сил инерции, то данный механизм будет находиться в состоянии статического равновесия. То есть это искусственный прием, приводящий неравновесную систему в состояние равновесия.
Искусственность приема заключается в том, что силы инерции прикладываются не к тем телам, которые заставляют двигаться звенья ускоренно (замедленно), а к самим звеньям.
Применив этот прием, в дальнейшем можно производить силовой расчет с использованием уравнений статики. Однако, чтобы решить задачу с помощью только уравнений равновесия, система должна быть статически определимой.
Условие статической определимости плоской кинематической цепи:
Для каждого звена, расположенного в плоскости, можно составить три независимых уравнения статики. Если в кинематической цепи имеется «n» подвижных звеньев, то в совокупности для этой цепи можно записать 3n независимых уравнений статики (равновесия). Эти уравнения используются для определения реакций в кинематических парах и неизвестных внешних сил.
На плоскости существуют кинематические пары только пятого и четвертого классов. Пары пятого класса представлены вращательной кинематической парой (шарниром) и поступательной парой (соединение ползуна с направляющей). В шарнире усилие между звеньями может передаваться в любом направлении, поэтому у реакции в шарнире неизвестными являются величина и направление (два компонента), т.е. для определения полной реакции во вращательной паре надо затратить два уравнения статики.
В первом приближении расчет ведется без учета сил трения. В этом случае перемещению ползуна вдоль направляющей ничто не препятствует. Перемещаться же поперек направляющей и поворачиваться ползун не может, поэтому в поступательной паре реакция направлена перпендикулярно направляющей и возникает реактивный момент, препятствующий повороту ползуна.
При силовом расчете обычно реактивный момент не определяют, а находят условную точку приложения реакции (произведение реакции на расстояние до ее условной точки приложения и есть реактивный момент). На определение реакции в поступательной паре также надо затратить два уравнения статики (определить два компонента – величину и точку приложения). Таким образом, на определение полной реакции в кинематической паре пятого класса необходимо затратить два уравнения статики.
Пары четвертого класса (высшие пары) на плоскости представляют соприкасающиеся между собой профили. В высшей паре усилие между звеньями передается по общей нормали к касающимся профилям (без учета сил трения). Поэтому в высшей паре четвертого класса реакция неизвестна только по величине (точка приложения реакции в точке контакта профилей, направление вдоль общей нормали к этим профилям).
Таким образом, для определения реакции в паре четвертого класса надо затратить одно уравнение статики (определить один компонент – величину реакции).
Если в кинематической цепи количество пар пятого класса равно Р5, то на определение реакций во всех этих парах надо затратить 2Р5 уравнений статики. На определение реакций во всех парах четвертого класса используется число уравнений, равное количеству этих пар Р4.
Таким образом, из 3n независимых уравнений статики 2Р5 уравнений используются для определения реакций в парах пятого класса и Р4 – для определения реакций в парах четвертого класса. Оставшиеся уравнения используются для определения неизвестных внешних сил, действующих на звенья механизма.
Пусть X – число уравнений, оставшихся для определения неизвестных внешних сил, тогда
но эта формула совпадает с формулой Чебышева для определения числа степеней свободы плоской кинематической цепи. В результате можно сформулировать условие статической определимости кинематической цепи следующим образом: кинематическая цепь статически определима в том случае, когда число неизвестных внешних сил, действующих на ее звенья, не превышает числа степеней свободы этой цепи.
Так как методы решения разработаны для групп Ассура, то необходимо сформулировать условие статической определимости группы Ассура. Группа Ассура – это кинематическая цепь, имеющая собственную степень свободы, равную нулю. Поэтому группа Ассура статически определима, если на ее звенья не действуют неизвестные внешние силы.
Уравнений в группе Ассура достаточно лишь для определения реакций в кинематических парах. Это обстоятельство предопределяет порядок силового расчета механизма:
- разбивают механизм на группы Ассура, взяв в качестве начального то звено, на которое действует неизвестная внешняя сила;
- решение начинают с последней присоединенной группы и заканчивают начальным звеном.
При таком подходе на группы Ассура всегда будут действовать только известные внешние силы и из рассмотрения их равновесия будут определены реакции в кинематических парах, а из рассмотрения условий равновесия начальных звеньев будут определены оставшиеся реакции и неизвестные внешние силы.
Поскольку решение ведется по группам Ассура, то ниже рассматривается принцип силового расчета групп на примере групп второго класса.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Задача силового расчета используемый метод и основные уравнения
Лекция 4. Силовой ( кинетостатический ) анализ механизмов.
Общие сведения и определения
Проектирование нового механизма всегда включает его силовое исследование, так как по найденным силам производится последующий расчет на прочность элементов кинематических пар и звеньев механизма.
При проведении силового анализа решаются основные задачи:
1. Определение реакций в кинематических парах механизмов, находящихся под действием заданных внешних сил. Эти реакции затем используются для расчёта звеньев и элементов кинематических пар (например, подшипников) на прочность, жёсткость, долговечность и т.д.
2. Определение уравновешивающей силы или уравновешивающего момента , приложенных к ведущему звену. Они уравновешивают внешние силы, приложенные к механизму. Эти величины нужны, например, для выбора двигателя, приводящего в движение данный механизм.
3. Дополнительно выясняют вопросы об уравновешенности механизма, износе его звеньев, о потерях на трение в отдельных кинематических парах, о коэффициенте полезного действия механизма в целом и др.
При силовом анализе, кроме основной (полезной) нагрузки на рабочий орган, необходимо учитывать силы тяжести звеньев, их силы инерции, силы трения в кинематических парах.
Силовой расчет ведется методом кинетостатики. В отличие от статического , кинетостатический расчет механизмов наряду с внешними силами (движущими силами, силами полезных и вредных сопротивлений, силами тяжести) учитывает и силы инерции масс звеньев.
Метод кинетостатики основан на принципе Даламбера, который применительно к механизмам можно сформулировать так: если ко всем внешним силам, действующим на систему звеньев, добавить силы инерции, тогда под действием всех этих сил система звеньев может условно считаться находящейся в равновесии.
При кинетостатическом расчете кинематическая цепь механизма разбивается на группы Ассура , которые являются статически определимыми. Расчет ведется путем последовательного рассмотрения условий равновесия отдельно каждой группы, начиная с наиболее удаленной от исходного механизма (ведущего звена), последним рас c читывается ведущее звено.
При рассмотрении условий равновесия группы без учета силы трения составляющие реакции во внешней вращательной паре представляются направленными по звену (нормальная реакция) и перпендикулярно звену (тангенциальная реакция) и приложены они в центре шарнира, во вращательной паре подлежат определению величины и направления нормальной и тангенциальной реакций.
В поступательной паре, в общем случае, подлежат определению величина и точка приложения реакции, так как известно только то, что направление реакций всегда перпендикулярно оси направляющих пары.
Анализ свойств механизма можно получить путем исследования каждой группы Ассура через 10 градусов (20 градусов или 30 градусов) угла поворота кривошипа. В этом случае выявляется полная картина силового нагружения всех подвижных соединений механизма и звеньев за цикл движения машины.
Цикл – промежуток времени, по истечении которого все кинематические параметры принимают первоначальное значение, а технологический процесс, происходящий в рабочей машине, начинает повторяться вновь.
Классическая задача силового анализа механизма обычно решается при таких исходных данных:
1) Кинематическая схема механизма.
2) Размеры и иные геометрические параметры звеньев.
3) Законы движения входных звеньев.
4) Массы и моменты инерции звеньев.
5) Силы и моменты полезных сопротивлений.
В дальнейшем будем считать, что к моменту начала силового расчета механизма выполнен его полный кинематический анализ и рассчитаны веса звеньев, их инерционные силы и моменты, а силы и моменты полезных сопротивлений заданы.
Этапы кинетостатического расчёта
Различают два этапа кинетостатического расчёта:
— Расчёт механизма без учёта потерь на трение в кинематических парах.
— После конкретного конструирования узлов производится дополнительный расчёт потерь мощности в кинематических парах на преодоление трения.
Итогом кинетостатического расчёта является определение движущей силы на ведущем звене, которая даёт возможность определить крутящий момент по формуле и мощность, по формуле: .
Полная мощность определяется по формуле: . По значению полной мощности выбирается мощность двигателя.
Порядок проведения кинетостатического расчёта:
1. Определение степени подвижности механизма.
2. Для каждого отдельного положения механизма внутри цикла его работы строятся планы скоростей и планы ускорений. С помощью планов ускорений определяются ускорения центров масс.
3. Механизм раскладывается на структурные группы Ассура .
4. Производится кинетостатический расчёт отдельных структурный групп начиная с последней , постепенно приближаясь к ведущему звену.
5. Кинетостатический расчёт ведущего звена.
6. Определение крутящего момента или движущей силы на ведущем звене.
7. Определение мощности двигателя.
8. Пункты 4-7 повторяются для множества положений механизма за полный цикл его работы.
9. Выбираются наибольшие значения мощности и усилий, действующие в кинематических парах.
10. На основании полученных данных составляется задание на проектирование.
Силы, действующие в механизмах
Различают две группы внешних сил.
Движущие силы Рдв или моменты движущих сил Мдв , которые:
— совершают положительную работу;
— направлены в сторону скорости точки приложения силы или под острым углом к ней;
— задаются посредством механической характеристики двигателя.
Пример: силы давления газа на поршень в двигателе внутреннего сгорания, силы веса при опускании груза и т.д.
Силы сопротивления РС и их моменты МС, которые:
— совершают отрицательную работу;
— направлены противоположно скорости.
В свою очередь силы сопротивления делятся на силы:
— полезного сопротивления Рп .с и моменты Мп.с (силы тяжести при подъеме груза);
— вредного сопротивления: трение в кинематических парах, сопротивление среды, внутреннее сопротивление (например, силы упругости звеньев).
Кроме этого существуют:
— силы веса (тяжести) , где – масса звена в кг; м/с 2 – ускорение свободного падения. При кинематическом исследовании считают, что сила тяжести приложена в центре тяжести звена. Если звено выполнено в виде стержня, то его ц.т . расположен в центре симметрии звена, а если в виде ползуна, то в центре шарнира. Силы тяжести в течени и расчётного цикла могут быть как движущими, так и силами полезного сопротивления, поэтому работа этих сил за цикл равна нулю. Эти силы считаются внешними силами.
— силы инерции ;
— моменты сил инерции , где m , JS – масса и массовый момент инерции звена; и – линейное и угловое ускорения;
— силы реакций в кинематических парах , возникающие в опорах звеньев и являющиеся внутренними силами для механизма в целом и внешними для каждого отдельного звена.
Необходимо отметить, что под силами понимаются равнодействующие соответствующих распределенных в месте контакта кинематической пары нагрузок. Все вышесказанное относительно сил распространяется и на моменты сил.
Силы инерции звеньев и моменты сил инерции. Так как звенья механизма находятся в движении, и имеют свои массы, то, особенно в быстродействующих механизмах рычажного типа, обязательно имеет место неравномерность движения звеньев. Это означает, что ускорения этих звеньев не равны нулю, что приводит к возникновению дополнительных сил динамического характера в виде сил инерции и моментов инерции . Из теоретической механики известно, что все силы инерции звена, совершающего плоскопараллельное движение и имеющего плоскость симметрии, параллельную плоскости движения, могут быть сведены к силе инерции , приложенной в центре масс S звена, и паре сил инерции, момент которых обозначим (рис. 4.1).
Рис. 4.1. Сила инерции звена и момента сил инерции
– главный вектор сил инерции, или сила инерции;
– главный момент сил инерции, или момент сил инерции; m – масса звена;
– массовый момент инерции относительно центра масс;
– ускорение центра масс;
– угловое ускорение звена.
и направлены в стороны, противоположные ускорениям и .
Для дальнейших расчётов удобно заменить и одной силой, использовав для этого 3 метода:
Перенос силы на плечо : момент сил инерции заменяется парой сил с плечом hu (рис. 4.2), причём одна сила приложена к центру масс звена S и направлена противоположно преобразуемой силе , а другая смещена на плечо hu и приложена к точке К – центру качания звена.
Рис. 4.2. Перенос силы на плечо при замене силы и момента одной силой
Определение центра качания звена через мгновенный центр ускорений (МЦУ). При этом сила инерции переносится параллельно самой себе на расстояние (рис. 4.3), вычисленное по формуле
, мм ,
где – мгновенный центр ускорений звена; откладывается в сторону, являющуюся продолжением отрезка .
Рис. 4.3. Определение центра качания звена
Метод замещающих точек. Подробно рассмотрен в литературе.
Рассмотрим определение сил и моментов в различных случаях.
;
; ;
; .
;
; ;
; .
;
; ;
; .
;
; ;
; .
;
; ;
; .
;
; ;
; .
Статическая определимость кинематической цепи
При силовом анализе механизмов (определении неизвестных сил, действующих на движущиеся звенья) можно использовать уравнения (законы) статики. Докажем это положение, проанализировав реакции в кинематических парах (табл.).
http://www.teormach.ru/lect4.htm

Алексей Алексеевич Ивахно
Эксперт по предмету «Физика»
Задать вопрос автору статьи
Под мощностью подразумевают работу, выполненную за единицу времени, однако этот подход в большинстве случаев требует уточнений, поскольку интенсивность выполнения работы может многократно измениться за рассматриваемое время. Например, при движении автомобиля водитель увеличивает и уменьшает поступление топливно-воздушной смеси в зону сгорания, переключает передачи трансмиссии, притормаживает. Всё это влияет на текущую мощность двигателя. Поэтому в физике различают мгновенную мощность — мощность, измеренную за промежуток времени достаточно малый, чтобы считать ее величину постоянной:
$P = limlimits_{t to 0}frac{Delta A}{Delta t}$,
где $Delta t$ — промежуток времени, $Delta A$ — проделанная за это время работа.
Поскольку мгновенные величины мощности могут меняться без какой-либо четко выраженной закономерности, подсчитать их среднее значение бывает затруднительно. Поэтому среднюю мощность находят просто как
![]()
Сдай на права пока
учишься в ВУЗе
Вся теория в удобном приложении. Выбери инструктора и начни заниматься!
Получить скидку 3 000 ₽
${langle}Prangle = frac{Delta A}{Delta t}$.
Следует различать мощность, связанную с общими затратами на движение и ту, что развивается для выполнения полезной работы. Так, один и тот же груз с одной и той же скоростью на одно и то же расстояние можно перевезти разными способами, например, на старинном паровозе и современном электровозе. Полезная работа будет выполнена одинаковая, но интенсивность затрат энергии — различная. Поэтому существует понятие средней полезной мощности, расчет которой зависит от многих факторов, связанных с особенностями движителей и сред, в которых выполняется работа.
Пример 1
Автомобиль массой 2 т поднимается в гору с постоянным ускорением по участку дороги с уклоном 30°. Движение длится 10 с. Скорость транспортного средства в начале подъема 20 км/ч, в конце 40 км/ч. Общая сила сопротивления (трение, вязкость воздуха и т.д.), постоянна и равна 600 Н. Определить среднюю полезную мощность двигателя.
Двигатель должен развить следующие силы:
- преодолевающую силу сопротивления;
- преодолевающую гравитацию, поскольку транспорт движется в гору;
- обеспечивающую ускорение.
Найдем их последовательно.
На преодоление силы сопротивления необходимо развить те же 600 ньютонов, но в направлении, совпадающем с вектором скорости.
Сила, преодолевающая силу тяжести, поскольку ее вектор находится под углом к вектору скорости, будет исчисляться по формуле:
$F_g = m cdot g cdot sin(alpha)$,
где $g$ — ускорение свободного падения, $m$ — масса. $alpha$ — угол наклона.
Приращение скорости:
$Delta v = v_1 — v_0 = frac{40000 — 20000}{3600} approx 5,56 frac{м}{с}$
Ускорение:
$a = frac{Delta v}{t} approx 0,556 frac{м}{с^2}$.
Просуммируем силы:
$F = 600 + 2000 cdot 9,8 cdot 0,5 + 2000 cdot 0.556 approx 600 + 9800 + 1112 = 11512 Н$
Работа равна произведению силы и пути, который можно выразить через время, начальную скорость и ускорение:
$A = F cdot (v_0 cdot t + frac{a cdot t^2}{2}) approx 11512 cdot (55,6 + 0,556 cdot 100) approx 11512 cdot 111,11 approx 1279111 Дж$
Разделив работу на время, получим среднюю полезную мощность:
$P = frac{1279111}{10} approx 127911 Вт$
Ответ: $approx 127911$ Вт. Примечание: полную мощность двигателя можно найти разделив это значение на КПД.
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме
«Не стыдно не знать,
стыдно не учиться»
В данной теме будут рассмотрены примеры решения задач на
расчет механической работы и мощности.
Задача 1. Двигатели электропоезда при движении с
постоянной скоростью 54 км/ч потребляют мощность 900 кВт. Определите силу тяги
двигателей, если их КПД составляет 80%. Какую работу совершила сила тяги
двигателей за 30 мин движения поезда?
|
ДАНО: |
СИ |
РЕШЕНИЕ: Коэффициент полезного действия — это есть отношение Мощность — это работа, отнесенная к единице времени, Сила тяги двигателей: Полезная работа двигателей: |
|
|
Ответ: 48 кН; 1,3 ГДж.
Задача 2. Какую работу надо совершить, чтобы
равномерно передвинуть ящик на 9 м по полу, прилагая усилие, направленное под
углом 30о к горизонту? Сила тяжести ящика 500 Н, а коэффициент
трения скольжения ящика о пол 0,2.
|
ДАНО: |
РЕШЕНИЕ: Механическая работа определяется по формуле Запишем второй закон Ньютона для рассматриваемого случая В проекциях на ось Ох В проекциях на ось О Сила трения определяется по формуле Тогда получаем Преобразуем последнее выражение Тогда механическая работа равна |
|
|
Ответ: 807 Дж.
Задача 3. Поезд, масса которого 784 т, начинает
двигаться в гору и за 50 с развивает скорость 5 м/с. Коэффициент сопротивления
движению равен 0,005, уклон горы — 0,005. Определите среднюю мощность
локомотива, считая силу сопротивления пропорциональной силе нормальной реакции
рельсов.
|
ДАНО: |
РЕШЕНИЕ: Строго говоря, в данном примере поезд нельзя принимать за Если считать силу тяги, развиваемую локомотивом, Запишем второй закон Ньютона в общем виде В проекциях на ось Оx: В проекциях на ось Оy: Сила трения определяется по формуле Тогда получаем Из кинематики равноускоренного движения
Тогда, средняя мощность локомотива, с учётом того, что
|
|
|
Ответ: 200 кВт.
Задача 4. На горизонтальной поверхности лежит брусок
массой 11 кг, к которому прикреплена пружина жесткостью 200 Н/м. Коэффициент
трения между бруском и поверхностью 0,1. К свободному концу пружины
прикладывают направленную под углом 45о к горизонту силу, под действием
которой брусок равномерно перемещается на 0,5 м. Определите совершенную при
этом работу.
|
ДАНО: |
РЕЩЕНИЕ: Под действием силы, приложенной к пружине, происходит Основное уравнение динамики при равномерном прямолинейном В проекциях на Ох: В проекциях на Оу: Тогда сила трения равна Тогда Тогда приложенная к концу пружины сила равна Из закона Гука выражим удлинение пружины Тогда полная работа равна |
|
|
Ответ: 5,5 Дж.