Кинематика колеса.
Движение
колеса имеет сложную структуру. Колесо
перекатывается по поверхности дороги
теоретически без проскальзывания, в то
время как в действительности проскальзывание
существует, но составляет сравнительно
небольшую величину.
Введём
три системы координат: xy – неподвижную
относительно поверхности дороги; x1y1
– подвижную относительно поверхности
дороги; x1y1
– подвижную и связанную с рамой велосипеда
или осью колеса, x2y2
– подвижную и связанную непосредственно
с колесом, которая, таким образом,
совершает сложное движение. Система
координат x1y1
совершает переносное поступательное
движение, в котором все точки имеют
одинаковую скорость V.
Система координат x2y2
совершает относительное вращательное
движение, в котором каждая точка колеса
движется с окружной скоростью Vp
= wp,
где w
– угловая скорость относительного
движения; p
– расстояние от начала координат O1
до рассматриваемой точки. Векторная
сумма переносной и относительной
скоростей любой точки колеса равна
абсолютной скорости Va=V+Vp
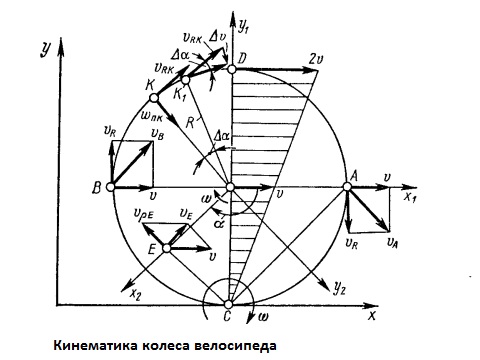
Точка
C
является точкой касания колеса с
поверхностью дороги и является неподвижной
при принятом выше условии – отсутствии
проскальзывания колеса относительно
дороги и деформации однотрубки. Скорость
точки С, принадлежащей колесу (p=R),
равна
![]()
Для
произвольной точки E
колеса, находящейся на расстоянии p=O1E
от оси колеса, скорость определится как
векторная сумма Ve=V+VpE.
Численное значение скорости точки E
может быть определено с помощью выражения
![]()
С
другой стороны, плоскопараллельное
движение колеса в каждый момент времени
можно представить как вращение около
мгновенного центра вращения. В данном
случае мгновенным центром вращения
является мгновенный центр скоростей в
точке C,
в котором скорость равна нулю. Положение
мгновенного центра скоростей можно
определить также как точку пересечения
перпендикуляров к направлениям векторов
абсолютных скоростей двух произвольных
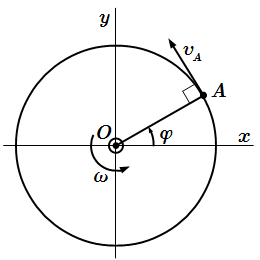
точек колеса, например А и Е.
Тогда
скорость любой точки колеса определяется
выражением V=wp,
где W
– угловая скорость вращения колеса
вокруг мгновенного центра скоростей,
равная угловой скорости вращения колеса
вокруг своей оси O1;
p
– расстояние от рассматриваемой точки
до мгновенного центра вращения. Так,
для точки D
это расстояние составляет Pd=2R,
для точек A
и B
будет Pв=Pа=Rsqrt2;
для произвольной точки Е
![]()
Направлен
вектор абсолютной скорости в сторону
вращения перпендикулярно к соответствующему
отрезку P,
соединяющему мгновенный центр скоростей
с рассматриваемой точкой.
Окружная
скорость любой i-й
точки Vri
направлена по касательной к траектории
её движения относительно оси вращения
колеса O1.
По мере увеличения угла “a”
точка A
последовательно занимает положения C,
B
и D,
а вектор Vri,
оставаясь постоянным по величине, меняет
своё направление. Это объясняется
наличием нормального ускорения движения
даже при равномерном вращении колеса,
т.е. при тангенциальном ускорении, равном
нулю. При бесконечно малом угле поворота
delta(a),
на который колесо поворачивается за
бесконечно малый промежуток времени
delta(t),
скорости в точках K
и K1
представляют собой равные по величине
векторы Vrk
и Vrk1,
касательные к окружности в этих точках.
Перенеся вектор скорости Vrk
в точку K1
получим вектор delta(V),
представляющий собой изменение скорости
точки K
при переходе в положение K1
за время delta(t).
Из подобия треугольников и с учётом
того, что delta(t)->0,
можно записать
![]()
Отсюда
следует, что нормальное ускорение точки
K
![]()
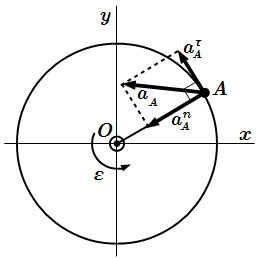
Это
ускорение направлено к центру колеса
и называется центростремительным. В
случае неравномерного движения полное
ускорение складывается из нормального
и тангенциального, которые взаимно
перпендикулярны:
![]()
Кинетостатика
системы
При
движении велогонщик и велосипед образуют
единую движущуюся систему, в которой
силы взаимодействия являются внутренними
и сами по себе не могут обеспечить
движения общего центра масс системы.
Для движения необходимы внешние силы,
которые в данном случае сводятся к силам
тяжести, силам трения колёс о дорожное
покрытие и силам аэродинамического
сопротивления.
Для
начала рассмотрим отдельно взятые
ведущее и ведомое колёса велосипеда, а
затем систему гонщик-велосипед в целом.
Ведущее
колесо.
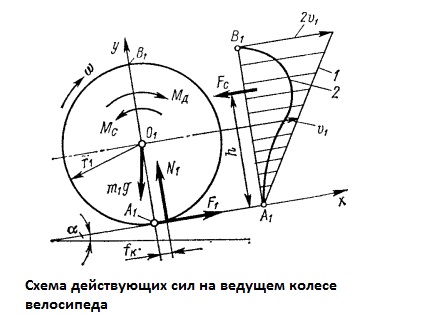
К
ведущему колесу массой m1
с моментом инерции J1
приложен движущий момент Mд,
под действием которого со стороны дороги
возникает сила трения скольжения F1=fN1,
где N1
– сила нормального давления; f
– коэффициент трения скольжения. Точка
A1
является мгновенным центром вращения
и её скорость равна нулю. Поэтому f
есть коэффициент трения покоя, величина
которого неопределенна и может принимать
значения от 0 до fmax.
Эпюра скоростей 1 в диаметральном сечении
колеса A1B1
является фактически эпюрой скоростей
набегающего воздушного потока, сила
сопротивления которого Fe,
приложенная в центре масс эпюры 2
суммарного лобового и вихревого
сопротивлений, создаёт момент полного
аэродинамического сопротивления Мe.
Колесо,
имеющее пневматическую шину в виде
однотрубки, деформируется в зоне контакта
с поверхностью дороги, что приводит к
смещению реакции N1
на некоторую величину fк,
называемую коэффициентом трения качения
Mк1=fкN1.
Учитывая малось величины fк,
в дальнейшем будем считать реакцию N1
приложенной в точке A1.
Уравнения
движения колеса запишутся в виде системы:
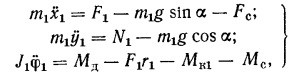
Где
x1,
y1
– координаты положения оси колеса O1;
Ф1 – угол поворота ведущего (заднего)
колеса; “a”
– угол наклона поверхности дороги к
горизонтали.
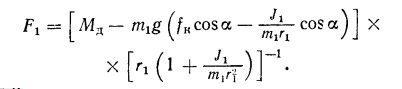
Если
колесо катится без проскальзывания, то
x1=r1Ф1;
y1=0;
N1=m1g*cos”a”.
Сила трения F1
без учёта
сил аэродинамического сопротивления
Движущий
момент Mд
в правой части уравнения может принимать
различные значения, но если правая часть
уравнения станет больше, чем fmax
N1,
то появится проскальзывание колеса
относительно дороги и увеличение Mд
оказывается нецелесообразным. Максимальное
ускорение составляет величину
![]()
Характерно,
что под уклон (“a”<0)
можно обеспечить движение без
проскальзывания с большими ускорениями.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Равномерное прямолинейное движение
Всё в мире находится в движении.
Каждый день, когда мы выходим из дома, мы стараемся рассчитать, насколько быстро доберемся до школы или работы.
Может, однажды мы захотим научиться чему-то новому и купим машину.
А физика объяснит тебе, как не попасть в аварию и как всюду успевать.
Приступим!
Равномерное прямолинейное движение — коротко о главном
Сегодня ты узнал:
- Как решить основную задачу механики в общем виде;
- Равномерное прямолинейное движение — такое движение, при котором тело за любые равные промежутки времени совершает равные перемещения;
- Скорость равномерного прямолинейного движения есть физическая величина, равная отношению вектора перемещения ко времени, за которое оно произошло;
- Скорость равномерного прямолинейного движения постоянна;
- Как решить основную задачу механики для равномерного прямолинейного движения;
- Как строить и анализировать графики равномерного прямолинейного движения;
- Графиком равномерного прямолинейного движения является прямая;
- Встреча – такое событие, при котором координаты тел в один и тот же момент времени совпадают;
- Проекция перемещения тела численно равна площади под графиком скорости тела;
- Как строить траекторию движения тела;
- Средняя скорость тела – векторная физическая величина, равная отношению перемещения тела на определенном участке траектории ко времени, за которое оно совершено;
- Средняя путевая скорость — это отношение длины пути, пройденного телом, ко времени, за которое этот путь был пройден;
- Траектория движения тела зависит от выбора системы отсчета;
- Как доказать закон сложения скоростей;
- Абсолютная скорость есть векторная сумма относительной и переносной скоростей;
А еще ты научился решать задачи разного уровня сложности!
Ой, я что, не сказал? Там сложные были!
Ты, наверное, и не заметил 😉
О том, как решить основную задачу механики
Мы помним, что основная задача механики – указать положение тела в пространстве в любой момент времени, не только в настоящем, но и в будущем.
Мы узнали это, когда только начали изучать кинематику.
Итак, что нужно знать для того, чтобы найти положение тела в пространстве?
Неплохо было бы знать, где оно находилось в начале своего движения, его начальные координаты. Ведь нам важно, откуда мы выдвигаемся в путь.
Зависят ли начальные координаты тела от времени? Совсем нет: мы просто принимаем то, что тело где-то есть.
А еще нам важно знать, как далеко оказалось тело от своего начального положения и куда вообще двигалось. Важно знать перемещение этого тела.
Давай опробуем свои силы! Думаю, мы уже готовы решить главную задачу!
Рассмотрим какое-то тело. Оно подвигалось, изменило свое положение, оказалось в другой точке.
Назовем ее конечной и постараемся найти ее координаты, то есть узнать положение тела после совершенного им перемещения.
Помним, что перемещение – вектор, поэтому изобразим его:
Уже сейчас мы можем указать начальные координаты тела! Нет чисел – не пугаемся, используем буквы:
Нам нужно узнать конечное положение тела. Отметим координаты тела в конце, их нам и нужно найти, чтобы определить положение тела в конце:
Но как найти эти координаты, зная лишь начальное положение тела и его перемещение? Как нам попасть из ({{x}_{0}}) в (x) и из ({{y}_{0}}) в (y) ?
Все очень просто! Если есть вектор, то какая-нибудь проекция-то найдется, правда?
Отметим их:
Теперь ответить на вопрос, как добраться из начала в конец становится очень легким: просто нужно прибавить к начальной точке проекцию перемещения для нужной оси!
То есть положение точки в любой момент времени можно записать так:
(x={{x}_{0}}+{{S}_{x}}) — для оси Х
(y={{y}_{0}}+{{S}_{y}}) — для оси Y
Поздравляю! Мы только что решили основную задачу механики!
Правда, сделали это в общем виде… Но перемещение ведь может быть очень разнообразным! Как вообще его найти? Не всегда же оно будет дано!
Это зависит от движения тела.
Равномерное прямолинейное движение
Определение равномерного прямолинейного движения
Самым простым движением по праву считается равномерное прямолинейное движение. Мы начнем с него.
Давай попробуем дать ему определение.
Всегда стоить помнить, что знать определения наизусть вовсе не обязательно. Главное – научиться строить его самостоятельно.
Успех любого хорошего определения заключается в правильной его структуре.
Равномерное прямолинейное движение – это движение. Мы нашли главное слово нашего определения. Давай развивать его.
Мы уже знаем, что такое движение. Давай дополним это определение.
Что значит равномерное? Равная мера… Но что является этой самой равной мерой?
Тело проходит равные пути. Логично, что происходит это за какие-то промежутки времени.
А за какие промежутки? За равные. За секунду, за минуту, за час. Не обязательно за ОДНУ секунду, ОДНУ минуту, ОДИН час. Равными промежутками времени могут быть, например, три часа или две секунды.
Но что значит прямолинейное? Можно сказать, что это движение по прямой. Но давайте объясним это, исходя из уже знакомых нам понятий.
Представь: какое-то тело движется, у нас в руках секундомер.
Прошла секунда – тело переместилось на метр. Еще секунда – еще метр. В том же направлении.
То есть тело совершает равные перемещения!
Поэтому…
Равномерное прямолинейное движение — такое движение, при котором тело за любые равные промежутки времени совершает равные перемещения.
С перемещением намного проще объяснить, почему за равные промежутки времени можно принимать абсолютно любое количество единиц времени.
Пусть тело совершает за 1 секунду перемещение (vec{S}).
Тогда за две секунды совершает перемещение (2vec{S}):
Будет ли тело все еще совершать равные перемещения за каждые 2 секунды? Конечно! Давай посмотрим:
Скорость
Равномерное прямолинейное движение тоже бывает разным: быстрым и медленным. Чтобы охарактеризовать его, существует скорость.
Чем большее перемещение совершает тело за промежуток времени, тем больше его скорость. Это очевидно: за одно и то же время гепард преодолевает расстояние во много раз большее, чем термит.
То есть скорость прямо пропорциональна перемещению!
А еще мы помним, что нам действительно важно направление скорости, ведь нам важно направление движения. То есть скорость – величина векторная. Давай убедимся в этом.
Скорость равномерного прямолинейного движения есть физическая величина, равная отношению вектора перемещения ко времени, за которое оно произошло.
Запишем это в виде формулы:
(vec{V}=frac{{vec{S}}}{t})
Векторы с обеих сторон, верно, но… Мы ведь учились умножать векторы, а не делить их. При делении тоже вектор получается?
Да. Ведь любое деление можно представить в виде умножения, смотри:
(vec{V}=frac{1}{t}cdot vec{S})
Время – скалярная величина. Оно не имеет направления. Поэтому можно сказать, что скорость есть перемещение, умноженное на скаляр, то есть тоже вектор! Более того, вектор перемещения и скорости сонаправлены.
Подробнее о свойствах векторов можно прочитать в Большой теории по векторам.
Помнишь, мы чуть выше выясняли, будет ли тело все так же совершать одинаковые перемещения за 2 секунды, а не за одну? Причем эти перемещения сами будут в два раза больше. Значит отношение останется прежним, вот так:
(vec{V}=frac{2vec{S}}{2t}=frac{{vec{S}}}{t})
Отсюда делаем вывод:
Скорость равномерного прямолинейного движения постоянна.
Как это записать? Кажется, очевидно, но это «задачка со звездочкой». Вот так:
(vec{V}=overrightarrow{const})
Мы не можем приравнять векторную величину к скалярной. Поэтому над константой тоже нужно ставить вектор.
Решение основной задачи механики для равномерного прямолинейного движения
Из уравнения скорости можно легко выразить перемещения, что сделает нас на шаг ближе к конкретному решению основной задачи. Давай сделаем это:
(vec{S}=vec{V}cdot t)
Из свойств векторов мы помним, что это будет справедливо и для проекций:
({{S}_{x}}={{V}_{x}}cdot t)
({{S}_{y}}={{V}_{y}}cdot t)
Стоп-стоп-стоп… Мы что, можем уже с помощью этого определить положение точки?
Да, почему нет? Просто подставим это вместо проекций перемещения туда, где мы решали основную задачу механики в общем виде:
(x={{x}_{0}}+{{V}_{x}}cdot t)
(y={{y}_{0}}+{{V}_{y}}cdot t)
Обычно в задачах по физике мы стараемся выбрать оси так, чтобы было проще работать с проекциями. Мы стараемся расположить их так, чтобы как можно больше векторов располагалось параллельно один осям и перпендикулярно другим, вот так:
Проекция перемещения на ось Y будет равняться нулю, мы можем не обращать на нее внимания.
По оси Y тело вообще не меняло своего положения, верно?
Именно поэтому в задачах чаще всего мы будем использовать упрощенный вариант нахождения конечного положения тела. Его координата будет описана лишь одним числом.
То есть используем лишь одну ось:
(x={{x}_{0}}+{{V}_{x}}cdot t)
Работаем с проекциями. Настораживаемся. Вспоминаем о знаках.
Здесь все просто: если проекция скорости положительна, тело движется вдоль оси. Если она отрицательна, тело движется против оси.
Помни, что работаем мы с координатной осью! Начальное положение тела тоже может быть отрицательным. Это зависит лишь от того, как расположено тело относительно начала координат:
Графики равномерного прямолинейного движения
Построение графика
Очень важно уметь описывать движение графиком. Это может значительно упростить решение задачи.
Давай посмотрим, как с помощью графика описать равномерное прямолинейное движение.
Любой график – множество точек, который показывает зависимость одного значения от другого. Эта зависимость определяется каким-то уравнением.
Например, когда мы строим параболу, мы руководствуемся уравнением (y={{x}^{2}}). Как еще это можно записать?
Вот так: (f(x)={{x}^{2}}). Это показывает, что функция (f) зависит от значения (x).
Давай аналогично составим график движения тела. Вспомним то главное уравнение:
(x={{x}_{0}}+{{V}_{x}}cdot t)
Иными словами, это график зависимости координаты тела от времени. Давай так и запишем:
(x(t)={{x}_{0}}+{{V}_{x}}cdot t)
Начинаем работать с уравнением. Предположим, что нам известна проекция скорости и начальное положение тела. Работать с конкретными числами удобнее.
Пусть: ({{V}_{x}}=0.5)м/с и ({{x}_{0}}=3)м
Тогда уравнение имеет вид: (x=3+0.5cdot t)
Нарисуем оси и обозначим их. Так как у нас даны единицы измерения (метры и секунды), мы обязательно должны подписать их рядом с названиями осей!
Теперь можем взять и рассмотреть положение тела в любую секунду: хоть в первую, хоть в двенадцатую!
Отметим точки и соединим их. Получим график движения.
А теперь вопрос на засыпку: может ли время быть отрицательным?
Могу ли я указать положение тела в минус третью секунду? Могу.
Для этого стоит помнить, что «нулевая» секунда – момент, когда мы запускаем секундомер, когда мы только начинаем наблюдать за телом. Но оно могло двигаться и до того, как мы включили таймер, верно?
Давай покажем движение тела до наших наблюдений пунктирной линией:
Зачастую точки пересечения графика с осями несут в себе очень важную информацию!
Например, когда мы только включили секундомер ((t=0)с), тело находилось в начальном положении (({{x}_{0}}=3)м), и это видно по графику!
А когда координата тела была равна нулю?
Все очень просто: за 6 секунд до того, как мы включили секундомер! Прямая пересекает ось времени в точке -6.
Итак, мы выяснили, что…
График равномерного прямолинейного движения представляет собой прямую.
Точка пересечения ее с осью Х есть координата в начальный момент времени.
Точка пересечения с осью времени показывает ту секунду, когда тело находится в начале координат.
И действительно, само уравнение (x={{x}_{0}}+{{V}_{x}}cdot t) уже напоминает стандартное уравнение прямой, которое мы изучаем на математике: (y=kx+m), где (m) — точка пресечения графика с осью Х, а (k) — коэффициент наклона прямой.
В нашем случае роль коэффициента наклона играет проекция скорости.
Зависимость графика от проекции скорости
Давай изобразим несколько графиков в общем виде, то есть без каких-либо конкретных значений. Например, пусть у нас есть два движущихся тела, вот так:
Чем отличаются движения этих двух тел?
Ну, прежде всего, у них разные начальные положения. Ладно.
А что насчет проекции скорости?
Рассмотрим первое тело. С течением времени оно все больше удаляется от начала координат. А вот второе к нему приближается: оно даже достигает начала координат через некоторое время (когда пересекает ось).
Значит, первое тело идет вдоль оси, а второе против нее, то есть к началу! Мы помним, что это определяет знак проекции скорости.
А именно: проекция скорости первого тела положительна. Проекция скорости второго тела отрицательна.
Со знаками разобрались. А как быть, если попросят узнать, какая проекция скорости больше?
Рассмотрим следующий график. Чтобы было легче его анализировать, представим, что два тела имеют одинаковое положение, когда мы включаем секундомер:
Чтобы понять, чья скорость больше, рассмотрим определенный промежуток времени, отделим его вертикальной пунктирной линией. А еще обозначим начальную и конечную координаты тел в этот промежуток времени:
Теперь посмотрим, чем отличаются графики. Ну так, навскидку. Они отличаются наклоном.
График движения второго тела расположен к оси Х значительно ближе. Что это значит?
Рассмотрим, какое расстояние прошло первое тело, обозначим его на рисунке. Оно численно равно проекции перемещения, убедимся с помощью формулы:
(Delta {{x}_{1}}={{x}_{1}}-{{x}_{01}}={{S}_{x}}_{1})
Теперь рассмотрим расстояние, которое преодолело второе тело:
(Delta {{x}_{2}}={{x}_{2}}-{{x}_{02}}={{S}_{x}}_{2})
Видим, что за одинаковый промежуток времени второе тело прошло значительно большее расстояние! Это значит, что его скорость больше.
Чем ближе к оси Х расположена прямая, тем больше скорость движения тела.
А что будешь делать с таким графиком?
Координата тела с течением времени не меняется. Значит ли это, что тело не движется вовсе?
Нет. Тело не движется лишь по этой оси. Но по какой-нибудь другой оси оно двигаться может.
Например, вот так:
Тело не меняет координаты по оси Х, однако движется по оси Y.
Если мы видим такой график, мы можем лишь утверждать, что проекция скорости равна нулю. О самой скорости говорить не можем.
Встреча
Помнишь самый первый рисунок с двумя телами? Вот этот:
В нем есть одна интересная деталь. Графики движения тел пересекаются.
Со временем все понятно: оно для всех идет одинаково, ничего не поделаешь.
А вот с координатой интереснее: ведь мы можем утверждать, что в какой-то момент тела встретились. То есть в какой-то момент их координаты на оси Х стали равны. Обозначим момент встречи и координату («место») встречи:
Встреча – такое событие, при котором координаты тел в один и тот же момент времени совпадают.
Это еще один момент, о котором стоит помнить при решении задач на графики.
А еще стоит обратить внимание на то, что координаты тел должны совпадать в один момент времени! Если в лесу мимо дуба пробежала лань, а через несколько дней мимо этого же дуба пробежал енот, мы не можем сказать, что они встретились.
Просто у них совпала траектория.
График зависимости проекции скорости от времени. Нахождение проекции перемещения
Рассмотрим несколько другой график. График зависимости проекции скорости от времени при равномерном прямоли…
Стоп, чего? Какой зависимости? Скорость ведь постоянная и не меняется со временем.
Ты абсолютно прав. А график-то начертить можем, вот так:
Скучный график. Просто прямая, параллельная оси времени. Проекция скорости не меняется, а время всё идет и идет.
Давай хоть что-то найдем по графику. Хоть площадь под ним. Обозначим эту область:
Получили прямоугольник. Его площадь ищем путем перемножения двух соседних сторон, то есть мы берем проекцию скорости и умножаем еще на время.
Где-то мы это слышали.
Верно, ведь именно так ищется проекция перемещения!
({{S}_{x}}={{V}_{x}}cdot t)
Совпадение? Не думаю.
Искать проекцию перемещения таким способом можно не только для равномерного прямолинейного движения, но и для других его видов!
Проекция перемещения тела численно равна площади под графиком скорости тела.
Решение простейших задач и задач на графики равномерного прямолинейного движения
Текстовые задачи
Задача 1. Охарактеризуйте движение соседки, которая спускается по лестнице и одновременно с этим закатывает рукава, услышав в 11 часов вечера громкую музыку из квартиры снизу, если уравнение ее движения: (x=2cdot t), а ось направлена вниз по лестнице.
Решение:
Итак, для начала вспомним уравнение движения в общем виде:
(x={{x}_{0}}+{{S}_{x}})
Соответствует ли уравнение движения соседки уравнению выше? Конечно!
Почему? По глазам вижу, догадываешься! Потому что его можно записать так:
(x=0+2cdot t)
Начальная координата соседки равна нулю: соседка двигалась из начала координат. С этим разобрались. Осталось определить тип ее движения.
Она движется вниз по лестнице. Значит, идет по прямой в одном направлении. Это прямолинейное движение.
Она свирепеет и ускоряется? Нет. Она движется равномерно. Давай вспомним уравнение движения для равномерного прямолинейного движения:
(x={{x}_{0}}+{{V}_{x}}cdot t)
И еще раз посмотрим на наше:
(x=0+2cdot t)
Сопоставляем их и понимаем, что рядом с временем расположена проекция скорости. Она, как видим, положительна и равна 2 м/с. Соседка двигается вдоль оси. Ось направлена вниз и соседка движется туда же!
Подробно мы разбирали зависимость направления от знака проекции в Большой теории по векторам.
Таким образом, соседка совершает равномерное прямолинейное движение вдоль оси из начала координат, а проекция ее скорости на эту ось равняется 2 м/с.
Задача 2. Таракан Вася совершает равномерное прямолинейное движение вдоль линейки (соответствующей оси Х) на столе семиклассника Вовы, который, старательно уча уроки, уже неделю не выносит из комнаты мусор. Проекция скорости таракана на эту ось 0.1 м/с. Вова берет секундомер и начинает отсчет в тот момент, когда таракан находится на втором сантиметре линейки.
На каком сантиметре линейки окажется таракан через две секунды?
Решение:
Первое правило решающих физику: увидеть тему и писать формулы по теме.
Второе правило решающих физику: увидеть тему и писать ВСЕ формулы по теме. Могут пригодиться.
Знаем тип движения! Равномерное прямолинейное!
Знаем уравнение равномерного прямолинейного движения! Пишем:
(x={{x}_{0}}+{{V}_{x}}cdot t)
Делов-то! Начнем подставлять известные величины для таракана. Из задачи знаем, что в начале отсчета таракан находится на втором сантиметре линейки…
Стоп. «Сантиметре…»
Никогда не теряй бдительность, боец. Всегда проверяй величины.
Переведем все, что есть, в СИ. Скорость – в м/с. Отлично, уже есть. Как быть с линейкой? Просто перевести сантиметры в метры!
Таракан был на втором сантиметре, а значит на 0.02 метре линейки!
Теперь можем записать уравнение его движения:
(x=0.02+0.1cdot t)
Чтобы узнать, где окажется таракан через 2 секунды, просто подставим цифру 2 в это уравнение:
(x=0.02+0.1cdot 2=0.22)м
На 0.22 метре линейки! Получили ответ. Но в задаче спрашивается, на каком сантиметре будет находится таракан. Переводим наш ответ в сантиметры и получаем, что таракан будет находится на 22-ом сантиметре линейки!
Задача 3. По коридору мчится восьмиклассник Петя, уравнение его движения можно описать следующим уравнением: (x=6+2cdot t). За ним несётся разъяренный директор Максим Михайлович, уравнение его движения: (x=3+3cdot t).
Догонит ли директор Петю и, если догонит, когда и на каком метре коридора это произойдет? Скорость измерять в м/с, время в секундах.
Решение:
Итак, давай разберемся. Что вообще значит «догонит»? То же самое, что «встретит», верно?
Мы знаем, что такое встреча. Это такое событие, при котором координаты тел в один и тот же момент времени совпадают.
Чтобы понять, встретятся ли они вообще, давай построим графики движения Пети (П) и директора (Д):
Видим, что прямые пересекаются. В какой-то момент времени их координаты действительно одинаковы.
Но как узнать, в какой?
Что-что? Видно по графику? Ну уж нет! Думаешь, там координата 12? А вдруг там 11.999?
Всегда нужно проверять себя аналитически.
Запишем два уравнения:
({{x}_{P}}=6+2cdot t) — Пети
({{x}_{D}}=3+3cdot t) — директора
При встрече у них одинаковые координаты: ({{x}_{P}}={{x}_{D}})
Да… Наверное, другие части уравнений приравнять будет полезнее:
(6+2cdot t=3+3cdot t)
Отсюда легко вычислить время встречи:
(t=3) c
Значит, через три секунды после начала отсчета их координаты будут одинаковы, они встретятся. Найдем место встречи, просто подставив время в одно из двух (какое больше нравится 🙂 ) уравнений:
({{x}_{B}}=6+2cdot 3=12) м
Директор догонит Петю через 3 секунды. Это произойдет на 12-ти метрах от начала коридора.
Задачи на графики
Задача 4. Написать уравнение движение тела, если график этого движения:
Решение:
Какое это движение? Видим, что графиком движения является прямая. Значит, это равномерное прямолинейное движение.
Удивительно, но начнем с уравнения:
(x={{x}_{0}}+{{V}_{x}}cdot t)
График очень информативный. По крайней мере мы уже знаем начальную координату: ({{x}_{0}}=8) м
Имеем:
(x=8+{{V}_{x}}cdot t)
Как найти проекцию скорости? Ну, давай ее выразим для начала.
({{V}_{x}}=frac{x-8}{t}) м/с
Дальше все очень просто: сделаем так, чтобы она осталось единственной неизвестной. Подставим в уравнение координату и время из графика, абсолютно любую пару, вот так:
Считаем:
({{V}_{x}}=frac{6-8}{2}=-1) м/с
Проекция скорости отрицательна. И правда: с течением времени тело приближается к началу координат, то есть движется против оси.
Подставим в уравнение:
(x=8-t) — уравнение движения тела.
Задача 5. Тело движется вдоль оси Х. Описать движение на каждом участке графика. Найти проекции скоростей. Построить графики проекции скорости и пройденного пути от времени.
Решение:
Опишем движение. Какое оно?
«Ха! Это не прямая, — скажешь ты, — а ломаная!»
И будешь абсолютно прав.
А я скажу: «А что такое ломаная? Это просто соединенные между собой отрезки! А отрезки — части прямых!»
Поэтому давай рассматривать этот график частями!
С первым отрезком все понятно: равномерное прямолинейное движения, ведь эта часть графика – прямая. С течением времени тело приближается к началу координат, значит движется против оси.
Найдем проекцию скорости.
Для начала, что есть скорость?
Мы помним, что скорость – отношение перемещения к промежутку времени.
(vec{V}=frac{{vec{S}}}{t})
Знаем, что это справедливо и для проекций:
({{V}_{x}}=frac{{{S}_{x}}}{t})
Ну, время у нас есть. А проекцию перемещения откуда взять?
Давай вспомним, что это такое. Перемещение – вектор, проведенный из начального положения тела в конечное. А проекция перемещения – проекция этого вектора. Логично, правда? То есть:
({{S}_{x}}=x-{{x}_{0}})
Подробнее о проекциях можно узнать в Большой теории по векторам.
Вот и нашли проекцию скорости:
({{V}_{x}}=frac{x-{{x}_{0}}}{t})
Подставим в уравнение выше значения необходимых величин:
({{V}_{x}}=frac{4-10}{2}=-3) м/с
Проекция скорости на первом участке графика равна -3м/с.
Второй отрезок необычнее: тело не меняет координату. Тело на этом участке неподвижно.
Так как в условии сказано, что тело движется именно вдоль оси Х, модуль проекции скорости на эту ось равен длине вектора скорости.
Так как тело не меняет координату, проекция его перемещения равна нулю. А значит и проекция скорости равна нулю.
Третий отрезок описывает равномерное прямолинейное движение. Тело отдаляется от начала координат и движется туда же, куда направлена ось.
Найдем проекцию скорости на третьем участке:
({{V}_{x}}=frac{9-4}{12-7}=1) м/с
Так. Давай разберемся, почему там 12-7.
Помнишь, мы считаем отношение проекции перемещения к ПРОМЕЖУТКУ времени. А от 7 до 12 секунды промежуток времени составляет 5 секунд.
Проекция скорости на третьем участке равна 1м/с.
Всё нашли, осталось лишь построить графики! Начнем с графика зависимости проекции скорости от времени. Начертим и обозначим оси, обязательно обозначив единицы измерения и помня, что проекция может быть отрицательна:
Работаем с первой частью:
Мы выяснили, что в течение первых двух секунд проекция скорости была постоянна (как-никак, равномерное прямолинейное движение 🙂 ) и равна -3 м/с.
Давай нарисуем!
На втором участке проекция скорости равна нулю, а на третьем – единице.
Избавимся от вспомогательных линий и получим:
Что-то мне подсказывает, что на графике пути тоже будет три участка. Приступим.
Нарисуем оси и обозначим их:
Логично будет утверждать, что, пока тело не начало двигаться, оно и путь никакой не прошло. Отметим это точкой на графике:
Первые две секунды тело двигалось равномерно со скоростью 3 метра в секунду. Значит, за две секунды тело прошло (3cdot 2=6) метров! Отметим это!.. Нет, не так, на графике отметим:
Движемся дальше. Мы знаем, что на втором участке тело было неподвижно, а значит путь никакой не проходило. За промежуток времени второго участка тело не прошло никакой путь.
Однако суммарно за всё свое движение тело все так же прошло 6 метров:
На третьем участке тело движется. Значит, суммарно пройденный путь увеличится. Оно двигалось со скоростью 1м/с. Посмотрим сколько оно прошло за 5 (12-7) секунд.
Оно пройдет 5 метров.
Добавим их к нашим уже пройденным 6 метрам и получим 11 метров:
Остается только соединить точки прямой:
Задача 6. Найти проекцию перемещения тела по графику
Решение:
Определимся, из чего вообще складывается то, что нам нужно найти. В разные промежутки времени тело двигалось с разными постоянными скоростями.
Значит, проекция перемещения складывается из проекций перемещения в разных промежутках времени! Их 6:
({{S}_{x}}={{S}_{x1}}+{{S}_{x2}}+{{S}_{x3}}+{{S}_{x4}}+{{S}_{x5}}+{{S}_{x6}})
Попробуем найти первую проекцию. Помнишь, мы знаем, что проекция перемещения есть площадь под графиком?
«Под графиком» означает «между графиком и осью», то есть вот эта:
Что ж, давай найдем перемещение:
Проекция скорости есть -2м/с, а промежуток времени – 3с.
Поэтому: ({{S}_{x1}}=-2cdot 3=-6)м
Попробуем найти площадь второго прямоугольника:
Сразу обрати внимание на то, что промежуток времени – с третьей по пятую секунду, то есть 2 секунды!
({{S}_{x2}}=2cdot 2=4)м
Аналогично для остальных:
({{S}_{x3}}=3cdot 3=9)м
({{S}_{x4}}=2cdot 1=2)м
({{S}_{x5}}=1cdot 1=1)м
({{S}_{x6}}=-3cdot 2=-6)м
Посмотрим, чему равна проекция перемещения:
({{S}_{x}}=-6+4+9+2+1-6=4)м
Тяжело в учении – легко в бою. Давай поднажмём и составим график зависимости проекции перемещения от времени.
Когда мы включили таймер, она была равна нулю:
В конце первого промежутка времени она становится равна -6м:
А, ну дальше-то все легко: отмечаем 4, потом отмечаем 9… Нет!
Мы ведь работаем с ОБЩЕЙ проекцией. А общая проекция есть сумма.
Тогда в конце второго промежутка проекция будет равна:
({{S}_{x}}={{S}_{x1}}+{{S}_{x2}})
Дальше – больше слагаемых.
Следующая точка: (-6+4=-2) м
А после нее:(-6+4+9=7) м и т.д.
Теперь соединяем точки по порядку:
Задача 7. Постройте траекторию движения колибри, если начальное положение его по оси Х – 1 м, по оси Y – 3 м, а проекция его скорости на оси, расположенные перпендикулярно друг другу, описывается следующими графиками:
Решение:
Увидел сложную задачу – пиши всё, что знаешь! Зачем? Так надо! Пиши!
Скорость изменяется скачками, но на отдельных промежутках она постоянна. Тело движется равномерно.
Тело изменяет свое положение в пространстве. Изменяет свою координату.
Вспомним, как записывается уравнение координаты тела при равномерном прямолинейном движении:
(x={{x}_{0}}+{{V}_{x}}cdot t)
(y={{y}_{0}}+{{V}_{y}}cdot t)
Мы учились делать это раньше. Построим графики зависимости координаты от времени.
Итак, по оси Х у нас 3 участка, обозначим их вспомогательными линиями на нашем новом графике:
Начнем с первого участка. Знаем проекцию скорости и даже начальную координату! Подарок судьбы.
(x=1+2cdot t)
Строим его на первом промежутке:
Теперь координата тела – 17м и тело начинает двигаться с другой скоростью. Из координаты 17 тело движется со скоростью… А, ни с какой скоростью. Проекция скорости на эту ось равна нулю, поэтому:
(x=17+0cdot t)
Координата не меняется. Рисуем:
Тело на 17 м. Оттуда продолжаем движение с проекцией скорости -2 м/с. Тогда: (x=17-2cdot t)
Аналогично строим график для оси Y. Теперь у нас есть два графика:
Построим траекторию движения в плоскости. Для этого нам нужны оси Х и Y одновременно!
Давай построим их:
Всегда бери длину с запасом! Чтобы потом не перечерчивать оси. Наибольшее значение по Х – 17м. По Y – 15м. На всякий случай будем брать 20Х20.
Давай будем анализировать по секундам. Каковы были координаты тела в момент начала отсчета? Давай посмотрим.
В начальный момент времени координата по Х равна 1м, по Y – 3м. В конечный момент по Х координата равна 13, по Y – 15м.
Отметим эти точки:
Дальше будем рассматривать «переломные моменты». Для первого графика это 8 и 10с, для второго – 4 и 6с.
То есть секунды: 4, 6, 8, 10.
Запишем координаты точек для нужных нам секунд:
4: (9;15)
6: (13; 9)
8: (17;11)
10: (17;13)
Отметим их и соединим прямой, укажем последовательность:
Задача решена!
Теперь ты знаешь, как работать с графиками равномерного прямолинейного движения и их уравнениями! Движемся дальше. Иронично звучит 🙂
Средняя скорость по перемещению. Средняя путевая скорость
Хочешь, покажу фокус?
Смотри.
Из горной пещеры вылетает дракон, а за ним в ту же секунду выбегает доблестный рыцарь. Дракон хочет разрушить замок, находящийся от пещеры на расстоянии 7 километров. Задача рыцаря – добраться до замка первым и остановить дракона.
Рыцарь скачет на лошади прямо к замку по равнине в течении 20 минут. Он обнаруживает, что мост через реку на пути к замку разрушен, поэтому решает переплыть реку, и (спасибо его хорошей подготовке) у него уходит лишь 5 минут на то, чтобы снять с себя доспехи и сделать это. Затем в течении 10 минут он продолжает движение к замку.
Дракон после вылета из пещеры движется вперед и вверх, на это у него уходит 15 минут. На какой-то высоте он останавливается, потому что видит стаю пролетающих мимо уток. Драконы, динозавры, птицы… Смекаешь, да? Он решает поиграться со своими «родственниками», на что у него уходит 15 минут. Затем он вспоминает о замке и стремительно пикирует к нему на протяжении 5 минут.
Давай всё это изобразим для наглядности:
Дракон и рыцарь совершили одинаковые перемещения, так? 7 км, ведь они оказались у замка, двигаясь из пещеры.
Давай посчитаем время каждого в пути. И для дракона, и для рыцаря оно составило 35 минут. Они прибыли к замку одновременно.
Так что ж получается… Они совершили одинаковое перемещение за одинаковый промежуток времени.
Но их траектории были очень различны! И двигались они по-разному!
Для того, чтобы описать это, существует средняя скорость по перемещению.
Средняя скорость тела – векторная физическая величина, равная отношению перемещения тела на определенном участке траектории ко времени, за которое оно совершено.
Можно в виде формулы: ({{vec{V}}_{cp}}=frac{{vec{S}}}{t})
Средняя скорость дракона и рыцаря по перемещению одинакова, ведь они пришли одновременно в одно и то же место.
Есть подвох, о котором тебе на математике не рассказали. Ты все время работал не с этой средней скоростью. А с этой:
Средняя путевая скорость — это отношение длины пути, пройденного телом, ко времени, за которое этот путь был пройден.
Понял, да? Путевая – про путь, а не про перемещение. Средняя путевая скорость совпадает (по модулю) со средней скоростью по перемещению только в том случае, если тело двигалось по прямой в одном направлении.
Средняя путевая скорость дракона сильно отличается от средней путевой скорости рыцаря.
Если не помнишь, в чем отличие пути от перемещения, советую посмотреть основные определения кинематики!
Относительность движения. Операции над скоростями
Давай вспомним одну из важнейших вещей, когда мы говорим про движение. Мы давали ему определение, когда говорили о кинематике в целом.
Это тело отсчета. То тело, относительно которого мы рассматриваем движение.
Мы уже знаем, что относительно одного тела тело может нестись с бешеной скоростью, а относительно другого не двигаться вовсе.
От системы отсчета зависит изменение положения тела. А что еще от нее зависит? Траектория зависит?
Оказывается, да!
Однажды человек изобрел колесо и изменил мир. Давай воспользуемся этим изобретением для того, чтобы найти ответ на вопрос выше.
Возьмем какую-то точку на колесе и пусть оно катится по дороге! Как движется эта точка относительно оси колеса? По кругу.
А относительно Земли?
Вот так:
Круто, да?
Эта кривая называется циклоида. И она точно отличается от траектории движения точки относительно оси колеса.
Сегодня мы научимся определять и связывать скорости в разных системах отсчета.
А еще на относительности основан главный закон скоростей – закон об их сложении.
Поступим как настоящие ученые. Готовые формулы – для слабаков. Мы будем выводить их сами.
Рассмотрим ситуацию.
По реке плывет плот (П) со спортсменом (С). На берегу реки сидит рыбак (Р) и наблюдает за этим. В какой-то момент пловец прыгает с плота и движется к другому берегу реки. Их несёт течение реки.
Давай изобразим это:
Давай нарисуем вектор перемещения спортсмена относительно плота и назовем его относительным перемещением:
Теперь нарисуем вектор перемещения плота, которого несет течение. Назовем этот вектор переносным:
А теперь посмотрим, как спортсмен двигался относительно рыбака, и назовем вектор этого перемещения абсолютным:
Ты только посмотри! У нас тут треугольник!
Нет, оставь свои теории заговора и иллюминатов. Не тот треугольник. Треугольник суммы векторов!
Переносное перемещение и относительное в сумме дают абсолютное!
({{vec{S}}_{a}}={{vec{S}}_{n}}+{{vec{S}}_{o}})
Как связать перемещение со скоростью? Нужно поделить его на время!
Та-а-ак… А его откуда брать?
Оно для всех течёт одинаково. Смело делим:
(frac{{{{vec{S}}}_{a}}}{t}=frac{{{{vec{S}}}_{n}}}{t}+frac{{{{vec{S}}}_{o}}}{t})
И получаем:
({{vec{V}}_{a}}={{vec{V}}_{n}}+{{vec{V}}_{o}})
А теперь давай разбираться.
Что такое абсолютная скорость? В нашем случае это скорость пловца относительно берега.
Абсолютная скорость – скорость движения тела относительно неподвижной системы отсчета.
Что такое переносная скорость? Скорость плота, скорость течения реки относительно берега.
Переносная скорость – скорость движущейся системы отсчета относительно неподвижной.
Что такое относительная скорость? Это скорость спортсмена относительна плота.
Относительная скорость – скорость движения тела относительно подвижной системы отсчета.
Таким образом,
Скорость движения тела относительно неподвижной системы отсчёта равна векторной сумме скорости этого тела относительно движущейся системы отсчета и скорости движущейся системы отсчета относительно неподвижной.
Иначе говоря:
Абсолютная скорость есть векторная сумма относительной и переносной скоростей.
Чем хороши векторные уравнения? Они не заставляют тебя думать о знаках.
Знаки ты определишь в проекциях. Это будет зависеть от условия задачи.
Внимание, практика!
Решение задач на среднюю скорость и действия со скоростями
Задача 8 (продолжение задачи 3 🙂 ). Поймавший Петю директор пишет замечание в его дневник, его ручка движется по листу бумаги со скоростью 0.05 м/с. Через 3 секунды Петя взмолится перед Максимом Михайловичем, его ручка станет двигаться со скоростью 0.03 м/с на протяжении 4 секунд.
А если бедному ученику повезёт и ручка начнет плохо писать, то, чтобы расписать ее, директор будет давить на нее сильнее в течение 5 секунд и скорость ее станет равна 0.01 м/с.
Найдите среднюю путевую скорость ручки. Зная, что длина красноречивого замечания равна 24 см, найдите среднюю скорость ручки по перемещению.
Решение:
Если в задаче много букв – составляй ее план. Давай это сделаем и переведем все в СИ, если необходимо.
3с – 0.05 м/с
4с – 0.03 м/с
5с – 0.01 м/с
24см=0.24м
Что значит «длина замечания»? Фактически, расстояние от начала до конца, то есть это кратчайшая ПРЯМАЯ. Запишем ее как вектор – получим перемещение.
Ведь перемещение есть вектор, проведенный из начального положение в конечное.
Давай посчитаем, сколько времени директор писал замечание:
(3+4+5=12) с
Значит, мы уже можем найти среднюю скорость по перемещению!
Сделаем это:
({{V}_{cp}}=frac{0.24}{12}=0.02) м/с
Почему там не вектор? Помни: мы не можем приравнивать векторные величины к скалярным. Когда нам сказали, чему равно перемещение, нам дали ДЛИНУ вектора перемещения. А длина есть величина скалярная.
Приступим к средней путевой скорости. Для начала нам нужно найти путь, время у нас уже есть.
Путь будет состоять из трёх участков, в которых тело двигалось с разными скоростями:
(L={{L}_{1}}+{{L}_{2}}+{{L}_{3}})
Каждый из них можно найти умножением скорости на участке на время движения с этой скоростью. Вот так:
(L={{V}_{1}}cdot {{t}_{1}}+{{V}_{2}}cdot {{t}_{2}}+{{V}_{3}}cdot {{t}_{3}})
Давай подставим:
(L=0.05cdot 3+0.03cdot 4+0.01cdot 5=0.32)
А теперь можем найти среднюю путевую скорость:
({{V}_{cpL}}=frac{0.32}{12}approx 0.027) м/с
Задача решена!
Задача 9. В небе летят два вертолёта. Скорость одного из них – 350 км/ч, другого – 400 км/ч. Найти скорость второго вертолёта относительно первого.
Решение:
Вот тебе дело: найди одно очень важное потерянное условие.
Дело в том, что в задаче не сказано, летят ли они в одном направлении или в разных. Рассмотрим оба случая.
Случай 1. Вертолеты движутся в одном направлении.
Давай вспомним главное уравнение:
({{vec{V}}_{a}}={{vec{V}}_{n}}+{{vec{V}}_{o}})
Мы ищем скорость одного вертолета относительно другого. Скорость одного движущегося тела относительно другого движущегося тела называется относительной. Выразим ее:
({{vec{V}}_{o}}={{vec{V}}_{a}}-{{vec{V}}_{n}})
Помним, что с векторами рука об руку идут их проекции. Давай начертим схему задачи и построим ось, на которую будем проецировать векторы скорости:
Всё это, конечно, здорово, но какая скорость абсолютная, а какая переносная?
Давай разбираться.
Переносная скорость – скорость движущейся системы отсчета относительно неподвижной.
В система отсчета, которую требует задача, все происходит относительно первого вертолета. Он – тело отсчета.
Значит, переносная скорость – скорость первого вертолета относительно земли.
Абсолютная скорость – скорость движения тела относительно неподвижной системы отсчета. То есть это скорость второго вертолета, данная в задаче.
Вернемся к уравнению и запишем его по-новому:
({{vec{V}}_{o}}={{vec{V}}_{a}}-{{vec{V}}_{n}})
({{vec{V}}_{o}}={{vec{V}}_{2}}-{{vec{V}}_{1}})
Мы помним, что с векторами рука об руку идут проекции. Давай запишем это уравнение в проекции на ось Х.
Обе этих скорости направлены по направлению оси. Значит, их проекции положительны:
({{V}_{ox}}={{V}_{2x}}-{{V}_{1x}})
Мы выбрали ось так, чтобы векторы были ей параллельны, поэтому мы смело можем утверждать, что проекции по модулю равны длинам векторов:
({{V}_{o}}={{V}_{2}}-{{V}_{1}})
Считаем:
({{V}_{o}}=400-350=50) км/ч
Случай 2. Вертолеты движутся в разных направлениях.
Нарисуем схему снова:
Нетрудно догадаться, что теперь проекция уравнения на ось будет иметь другой вид. Проекция скорости первого вертолета будет отрицательна: она направлена против оси.
({{vec{V}}_{o}}={{vec{V}}_{2}}-{{vec{V}}_{1}})
({{V}_{o}}={{V}_{2}}-(-{{V}_{1}})={{V}_{2}}+{{V}_{1}})
Скорости складываются. И правда: оба вертолета стремятся отдалиться друг от друга, никто никого не догоняет.
({{V}_{o}}=400+350=750) км/ч
Таким образом, скорость второго вертолета относительно первого равна 50 км/ч, если они движутся в одном направлении, и 750 км/ч, если движутся в разных.
Задача 10. Дядя Стэн, с уверенностью открыв сезон рыбалки, мчится на моторной лодке против течения реки в течение 3 ч и преодолевает 4 км, пока не вспоминает, что забыл дома свой любимый сборник анекдотов. Скорость течения реки – 2.5 км/ч.
Сколько времени понадобится Стэну, чтобы преодолеть то же самое расстояние, возвращаясь обратно?
Решение:
Давай сделаем рисунок. Это в большинстве случаев упрощает задачу!
Сначала нарисуем реку с течением:
А теперь лодку Стэна, которая плывет против течения. Обозначим ее собственную скорость.
Давай посмотрим, как мы можем связать эти две скорости с путем и временем.
Для начала вспомним формулу:
({{vec{V}}_{a}}={{vec{V}}_{n}}+{{vec{V}}_{o}})
Пройденный путь и время будет определять абсолютная скорость – та, что характеризует движение тела относительно неподвижной системы отсчета. В нашем случае – берега.
Можно объяснять проекциями, а можно просто понять. Куда легче плыть? По течению или против? Конечно, по течению! Оно подгоняет тебя.
В нашей ситуации Стэн сначала плывет против течения. Абсолютная скорость будет меньше собственной скорости лодки, ведь ее тормозит течение.
Давай запишем:
({{V}_{a1}}={{V}_{L}}-{{V}_{T}}) или (frac{L}{{{t}_{1}}}={{V}_{L}}-{{V}_{T}}), где ({{t}_{1}}) — время против течения.
Хорошо. Посмотрим, что может дать нам вторая часть задачи.
Здесь лодка идет по течению. Уравнение имеет вид:
(frac{L}{{{t}_{2}}}={{V}_{L}}+{{V}_{T}}), где ({{t}_{2}}) — время по течению
Таким образом, у нас есть система уравнений:
(frac{L}{{{t}_{2}}}={{V}_{L}}+{{V}_{T}})
(frac{L}{{{t}_{1}}}={{V}_{L}}-{{V}_{T}})
Нам неизвестна собственная скорость лодки. А нам она и не нужна! Вычтем одно уравнение из другого и получим:
(frac{L}{{{t}_{2}}}-frac{L}{{{t}_{1}}}=2cdot {{V}_{T}})
Отсюда нужно выразить время по течению:
({{t}_{2}}=frac{L}{2cdot {{V}_{T}}+frac{L}{{{t}_{1}}}})
Считаем:
({{t}_{2}}=frac{4}{2cdot 2.5+frac{4}{3}}approx 0.6) ч
36 минут потребуется Стэну, чтобы приплыть обратно.
Задача 11. По узкой лесной тропе колонной длиной в 30 метров идут туристы со скоростью 5 км/ч. Замыкающий посылает одного туриста в начало строя, чтобы тот передал гиду карту местности. Турист бежит в начало строя со скоростью 8 км/ч и, выполнив поручение, тут же бежит обратно с той же скоростью.
Сколько времени потребуется туристу, чтобы добежать до начала строя и вернуться обратно?
Решение:
Начнем с рисунка. Есть колонна определенной длины (пусть будет l), она движется с определенной скоростью. Из начала выходит турист (Т) и движется с другой скоростью:
Смотри. Пока турист движется, колонна тоже движется. Значит туда он пробежит путь больше, чем обратно:
Выглядит сложно.
Ну да, конечно! Это как идти в школу в соседнем дворе и для этого каждый раз покупать билет в Антарктиду.
Нужно выбрать удобную систему отсчета!
Сделаем так, чтобы колонна была неподвижна. Будем рассматривать все относительно нее. Можно даже представить, что ты один из туристов 🙂
Сделаем другую картинку!
Если ты один из туристов, будет очевидно, что туда и обратно «посыльный» будет двигаться с разной скоростью.
Например, когда ты едешь по шоссе, кто кажется быстрее: машины, которые обгоняют твою или машины, которые едут на встречу? Очевидно, что те, кто едут навстречу.
Теперь осталось определить, с какой скоростью турист движется туда и обратно.
Изначально он движется с колонной в одном направлении, то есть пытается ее обогнать. Результирующая скорость будет меньше его собственной:
({{V}_{1}}={{V}_{T}}-{{V}_{K}})
({{V}_{1}}=8-5=3) км/ч
Когда он движется обратно, колонна будет идти ему навстречу. Результирующая скорость будет больше:
({{V}_{2}}={{V}_{T}}+{{V}_{K}})
({{V}_{2}}=8+5=13) км/ч
Слишком быстро? Посиди и подумай. Мне не удастся просто вложить знания в твою голову. Ты сам тоже должен стараться!
Итак, из чего складывается время, затраченное туристом? Из времени туда и обратно!
(t={{t}_{1}}+{{t}_{2}})
Время в пути есть путь, деленный на скорость. Давай подставим:
(t=frac{l}{{{V}_{1}}}+frac{l}{{{V}_{2}}}=frac{l}{{{V}_{T}}-{{V}_{K}}}+frac{l}{{{V}_{T}}+{{V}_{K}}})
Теперь можем посчитать!
(t=frac{0.03}{3}+frac{0.03}{13}approx 0.0123)ч
Или приблизительно 44 секунды!
Задача решена! Оказывается, она очень простая, если верно выбрать систему отсчета.
Задачи в плоскости
Задача 12. Индейцы переплывают реку. Один из них, Красный Джо, встает напротив маленького причала и прыгает в воду, начиная плыть в его сторону со скоростью 2 м/с. Расстояние от причала до берега – 120 м. Течение реки имеет скорость 3 км/ч.
Куда на самом деле приплывет Красный Джо, позабывший духовную (и не только) связь своей скорости с рекой, и сколько времени на это уйдет?
Решение.
Итак, в мыслях индейцах он плыл бы так:
И это было бы верно, если бы он плыл в стоячей воде! Но течение изменяет его движение:
Он движется вперед и его еще переносит река! Обозначим расстояние, на которое его перенесет от причала, за Х. Его и нужно найти.
Еще нам дано расстояние до причала. Покажем на рисунке:
Как можно найти Х? Давай посмотрим, как движется тело по горизонтали. Оно просто смещается со скоростью течения, верно?
Значит, Х можно найти самым простым уравнением пути, которое мы знаем еще с пятого класса!
(X={{V}_{T}}cdot t)
Но как найти время?
Для этого нужно понять, что сносить его будет ровно столько времени, сколько он движется вперед.
То есть это то же время, что он затратил бы в стоячей воде, чтобы переплыть реку!
(t=frac{l}{{{V}_{K}}})
Подставим в уравнение выше:
(X={{V}_{T}}cdot frac{l}{{{V}_{K}}})
Теперь можем ответить на все вопросы задачи! Только не забудь перевести все в единую систему единиц измерения.
В задачах на движение не особенно важно (если не сказано иное), какие использовать единицы измерения. Главное, чтобы везде в решении они были одинаковые, например, везде километры или везде метры, везде часы или везде секунды. Как тебе удобно.
3 км/ч примерно равняется 0.83 м/с.
Подставляем значения в формулы:
(X=0.83cdot frac{120}{2}=49.8)м
Найдем время:
(t=frac{120}{2}=60)c
Таким образом, Красному Джо потребуется 1 минута на то, чтобы переплыть реку и оказаться на расстоянии 49.8 метров от причала.
Но есть и другой способ решения, если этот кажется тебе подозрительно легким 🙂
Попробуем решить эту задачу геометрией!
Вектор скорости течения параллелен отрезку Х, который нам нужно найти. Давай используем параллельный перенос и поставим его в более удобное место:
Сумма векторов скорости Красного Джо и течения даст нам абсолютную скорость – скорость, с которой тело движется относительно берега.
Вектор абсолютной скорости будет лежать на пунктире, конец которого – положение Джо после преодоления реки.
А теперь рассмотрим подобные треугольники:
Теперь запишем для них уравнение подобия, используя известные нам величины:
(frac{l}{{{V}_{K}}}=frac{X}{{{V}_{T}}})
Отсюда можем легко найти Х:
(X=frac{lcdot {{V}_{T}}}{{{V}_{K}}})
У нас получилась та же самая формула!
Задача 13. При скорости ветра 12 м/с капли дождя падают под углом 30 градусов к вертикали. При какой скорости ветра они будут падать под углом 45 градусов?
Решение:
Приятно и легко смотреть на дождь в окне. А еще легче решить эту задачу.
Если в физике видишь углы, ты точно будешь использовать тригонометрию. От нее не убежишь.
Начертим рисунок. Прежде всего, у нас есть вектор скорости ветра и какая-то вертикаль:
Как бы падали капли без ветра? Просто вниз:
Для удобства будем рассматривать одну каплю.
В этой задаче ветер можно сравнить с течением реки! Давай сделаем рисунок по этому сравнению!
Но где тут угол? Все просто: это будет угол вектора суммы!
Именно этот вектор принадлежит абсолютной скорости – той, что описывает движение капли относительно земли (и вертикали)
Давай разбираться. Скорость капли при отсутствии ветра нам неизвестна.
Не пугайся. Надежда на то, что неизвестные сократятся, всегда умирает последней.
Нам известна скорость ветра. И угол.
Рассмотрим получившийся у нас треугольник: он прямоугольный, его гипотенуза – абсолютная скорость. Она тоже неизвестна.
Давай попробуем с помощью угла связать два катета этого треугольника! Здесь поможет тангенс. Это отношение противолежащего катета к прилежащему, то есть:
(tgalpha =frac{{{V}_{B}}}{{{V}_{K}}})
Без векторов, потому что мы рассматриваем их длины и работаем с треугольником!
Давай выразим скорость капли в безветренную погоду, она ведь не изменится, она просто дана (вообще-то не дана, ну ладно) нам как факт.
({{V}_{K}}=frac{{{V}_{B}}}{tgalpha })
То есть когда скорость ветра и угол изменятся, мы все еще можем записать:
({{V}_{K}}=frac{{{{{V}’}}_{B}}}{tgbeta })
Давай приравняем:
(frac{{{V}_{B}}}{tgalpha }=frac{{{{{V}’}}_{B}}}{tgbeta })
Нужно найти новую скорость ветра. Выразим ее:
(frac{{{V}_{B}}cdot tgbeta }{tgalpha }={{V}_{B}}^{prime })
Можем подставить значения:
({{{V}’}_{B}}=frac{12cdot tg{{45}^{o}}}{tg{{30}^{o}}}=frac{12cdot 3}{sqrt{3}}approx 20.8) м/с
Задача решена!
Подготовка к ЕГЭ на 90+ в мини-группах
![]()
Алексей Шевчук — ведущий мини-групп
математика, информатика, физика
+7 (905) 541-39-06 — WhatsApp/Телеграм для записи
alexei.shevchuk@youclever.org — email для записи
- тысячи учеников, поступивших в лучшие ВУЗы страны
- автор понятного всем учебника по математике ЮКлэва (с сотнями благодарных отзывов);
- закончил МФТИ, преподавал на малом физтехе;
- репетиторский стаж — c 2003 года;
- в 2021 году сдал ЕГЭ (математика 100 баллов, физика 100 баллов, информатика 98 баллов — как обычно дурацкая ошибка:);
- отзыв на Профи.ру: «Рейтинг: 4,87 из 5. Очень хвалят. Такую отметку получают опытные специалисты с лучшими отзывами».
Заключение
Мы разобрались с самым простым видом движения.
Необходимо очень хорошо разбираться даже в тех вещах, которые кажутся очевидными.
Дальше будет легче, ведь у нас уже есть хорошая база! Теперь будут меняться лишь характеристики движения.
Надеюсь, тебе понравились задачи 🙂
Все ли было понятно? Узнал ли ты что-то, о чем не рассказывали в школе?
Парадокс колеса
На приведённом рисунке хорошо видно, что все точки расположенные на радиусе колеса при совершении им одного оборота занимают те же самые места, на которых они были до начала вращения. Иными словами все точки радиуса колеса за один оборот перемещаются на одно и то же расстояние.
В то же время из школьного курса математики известно, что длина окружности равна:
Если прокатить колесо по поверхности и затем замерить пройденный им путь, то он будет точно соответствовать длине его окружности. Таким образом, две точки колеса: центр вращения и точка на внешней окружности проходят путь точно соответствующий приведённому расчёту. Но вот в отношении меньших радиусов мы приходим к выводу, что траектория их движения противоречит каноническому утверждению.
Так путь пройденный точкой, расположенной на половине радиуса колеса (r = R/2) должен быть равен:
C(r) = пиR, т.е. в половину меньше траектории точки расположенной на внешней окружности.
Но на самом деле она проходит фактически путь вдвое больший.
Соотношение фактически пройденной траектории и фактической дины окружности описываемый соответствующим радиусом растёт с уменьшением радиуса, фактически до бесконечности. Но в точке вращения он вновь возвращается к единице.
Самое удивительное в том, что если вырезать любую внутреннюю часть колеса и измерить его окружность, то она точно будет соответствовать вычисленной по канонической формуле.
Рассмотренный парадокс усиливается в случае, если колесо прокатывается с внешней стороны другой окружности. В этом случае траектория внутренних радиусов становится больше траектории точки на внешнем радиусе. И, наоборот, при прокатывании с внутренней стороны их траектория становится меньше.
Таким образом, можно сделать вывод о том, что траектория точек расположенных на внутренних радиусах колеса зависти не от величины собственного радиуса, а от радиуса внешней окружности. Что при этом происходит с материальными точками колеса расположенных на этих радиусах в пространстве остаётся загадкой.
Единственно разумное объяснение этого феномена предложил Галилей. Он считал, что поскольку фактическая траектория движения внутренних точек значительно больше фактической длины окружности, то точки внутренних радиусов проходят наблюдаемую траекторию с большей скоростью, чем это предписано им физикой [1]:
V = w*R, где w — угловая скорость вращения колеса.
Фактически линейная скорость внутренних точек колеса должна описываться уравнением:
V = n*w*r, где n = R/r
R – внешний радиус колеса;
r – внутренний радиус.
Иными словами линейная скорость точек внутренних радиусов является величиной постоянной и зависит только от внешнего радиуса колеса.
Вывод прямо скажем обескураживающий, но иного разумного объяснения пока ни кто не предложил.
Математически парадокс колеса в интерпретации Галилея описывается следующим уравнением:
dV = w*(R-r), где
dV – изменение скорости движения внутренних точек колеса;
R – внешний радиус колеса;
r – внутренний радиус колеса.
При r = R dV = 0
При r = 0 dV = w*R
Иными словами, изменение скорости точек расположенных на внутренних радиусах колеса меняется пропорционально от 0 на внешнем радиусе до V=w*R в центре вращения колеса. Поэтому ось колеса перемещается в пространстве с той же скоростью, которая соответствует линейной скорости вращающегося движения внешней окружности колеса при его прямолинейном движении. Соответственно такую же скорость имеют и все внутренние точки колеса.
С физической точки зрения полученный результат интерпретируется как движение жёсткого стержня, расположенного перпендикулярно направлению линейного движения оси вращения. Если рассмотреть движение такого стержня без привязки его к вращательному движению, то не трудно заметить, что все материальные точки стержня имеют одну и ту же скорость.
Преобразование вращательного движения в линейно-поступательное в данном случае решается методом рычага в рамках курса теоретической механики, которой к сожалению во времена Галилея ещё не существовало.
[1] Очевидно, именно по этому, этот парадокс практически не обсуждается в научной литературе.
Поскольку один из комментаторов так возбудился после прочтения этой статьи, что внёс меня в свои чёрные списки, и у меня нет возможности ему ответить иным путём, поэтому использую материал статьи не по назначению.
Сазонов Сергей 3 сентября 2019 года в 12:54
Писать рецензию на Вашу бредятину «Парадокс колеса» считаю излишним (много чести) — найдите в детском журнале «Квант» за 1975 год статью «ЦИКЛОИДА» . Там — примерно этот круг вопросов. Парадокса нет.
(конец цитаты)
К сожалению, найти указанный журнал в Интернете не смог, поэтому не смог лично ознакомиться со статьёй. Но уже само её название «ЦИКЛОИДА» говорит о том, Сергей Сазонов не видит разницы между прямой и циклоидой. В парадоксе колеса траектория меньшего радиуса разворачивается не в виде циклоиды, а в виде прямой линии. В этом то, как раз, и заключается парадокс. С другой стороны, то, что этим парадоксом интересовались Аристотель, Галилей, и возможно другие, не менее, замечательные умы человечества, говорит о том, что парадокс действительно существовал.
Уничижительное отношение к оппонентам явный признак ограниченной умственной деятельности. Конечно, можно было и не обращать внимание на подобные выпады, но, к сожалению, подобный уровень комментаторов встречается не так уж редко, поэтому считаю необходимым противостоять банальному хамству.
Задача 1.1 (3)
Найти уравнения движения точки М обода колеса радиуса R вагона, который движется по прямолинейному участку пути со скоростью V. Колесо катится без скольжения. Точка М в начальный момент движения соприкасалась с рельсом, т.е. занимала положение М0 (рис. 1.1).
Изобразим на расчетной схеме (рис. 1.1) оси координат х и у, начало координат поместим в начальное положение точки М0.
Рассмотрим два положения колеса: в начальный момент t = 0 и в текущий момент времени t.
Отметим положение точки М на ободе колеса и положение центра С колеса в момент t, координаты точки: xм = М0В, ум = МВ.
Расстояние от центра колеса до рельса остается постоянным и равным R; это значит, что центр C колеса движется по прямой, параллельной оси х. За время t центр колеса переместится на расстояние C0C = Vt (закон равномерного движения точки C), одновременно колесо повернется на угол j .
Чтобы получить уравнения движения точки М, надо координаты этой точки представить как функции времени.
Из расчетной схемы (рис. 1.1) видно, что
Из треугольника МЕС имеем;
МЕ = Rsin (90° – j ) = Rcosj ,
ЕC = Rcos (90° – j ) = Rsinj ,
Тогда хм = Vt – Rsinj , (a)
Найдем зависимость угла j от времени t: так как колесо катится без скольжения, то длина дуги АМ окружности обода колеса (рис.1.1) равна длине отрезка М0А.
но длина дуги АМ равна также произведению радиуса R на центральный угол j ; поэтому Vt = Rj , отсюда  .
.
Теперь уравнения (а) будут иметь вид
 ;
;  .
.
Полученные уравнения представляют собой уравнения движения точки М. В аналитической геометрии показано, что это параметрические уравнения циклоиды (параметром в данном случае является время t). Таким образом, траектория точки обода колеса, движущегося по прямолинейному участку пути без проскальзывания, является циклоидой. Длина одной ветви циклоиды L (рис. 1.1) равна 2p R, высота – H = 2R.
Определение скоростей и ускорений точек твердого тела при поступательном и вращательном движениях – решение задачи
Основные законы и формулы, применяемые при решении задач
Вращательное движение вокруг неподвижной оси
Рассмотри твердое тело, вращающееся вокруг неподвижной оси z . Сделаем рисунок. Ось вращения направим перпендикулярно плоскости рисунка, на нас. Пусть φ – угол поворота тела вокруг оси, отсчитываемый от некоторого начального положения. За положительное направление выберем направление против часовой стрелки. Угловая скорость ω равна производной угла поворота по времени t :
.
При , тело вращается против часовой стрелки; при – по часовой. Вектор угловой скорости направлен перпендикулярно плоскости рисунка. При он направлен на нас; при – от нас.
Угловое ускорение ε равно производной угловой скорости по времени:
.
Вектор углового ускорения также направлен перпендикулярно плоскости рисунка. При он направлен на нас; при – от нас.
Скорость точки при вращательном движении тела вокруг неподвижной оси
Рассмотрим точку A , принадлежащую твердому телу. Опустим из нее перпендикуляр OA на ось вращения. Пусть – расстояние от точки до оси. Траекторией движения точки A является окружность (или дуга) с центром в точке O радиуса .
Абсолютное значение скорости точки A определяется по формуле:
.
Вектор скорости направлен по касательной к траектории (окружности), перпендикулярно отрезку OA . При этом вектор должен производить закручивание в ту же сторону, что и вектор угловой скорости .
Касательное (или тангенциальное) ускорение точки A определяется аналогично скорости:
.
Оно направлено по касательной к окружности, перпендикулярно OA . При этом вектор должен производить закручивание в ту же сторону, что и вектор углового ускорения .
Ускорение точки при вращательном движении тела вокруг неподвижной оси
Нормальное ускорение всегда направлено к центру окружности и имеет абсолютную величину
.
Полное ускорение точки A , или просто ускорение, равно векторной сумме касательного и нормального ускорений:
.
Поскольку векторы и перпендикулярны, то абсолютная величина ускорения точки A определяется по формуле:
.
Поступательное прямолинейное движение
Теперь рассмотрим прямолинейное поступательное движение тела. Направим ось x вдоль его линии движения. Пусть s есть перемещение тела вдоль этой оси относительно некоторого начального положения. Тогда скорость движения всех точек тела равна производной перемещения по времени:
.
При , вектор скорости направлен вдоль оси x . При – противоположно этой оси.
Ускорение точек тела равно производной скорости по времени, или второй производной перемещения по времени:
.
При , вектор ускорения направлен вдоль оси x . При – противоположно.
Соприкосновение тел без проскальзывания
Рассмотрим два тела, находящиеся в зацеплении без проскальзывания. Пусть точка A принадлежит первому телу, а точка B – второму. И пусть, в рассматриваемый момент времени, положения этих точек совпадают. Тогда, если между телами нет проскальзывания, то скорости этих точек равны:
.
Если каждое из тел вращается вокруг неподвижной оси, то равны соответствующие касательные ускорения:
.
Если одно из тел движется поступательно (пусть это второе тело), то ускорение его точек равно касательному ускорению точки соприкосновения первого тела:
.
Пример решения задачи
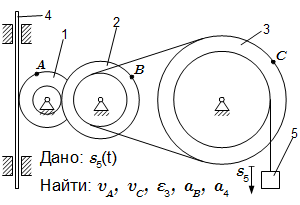
Механизм состоит из ступенчатых колес 1, 2, 3, находящихся в зацеплении и связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной на одно из колес. Радиусы ступеней колес равны соответственно: у колеса 1 – r1 = 2 см, R1 = 4 см, у колеса 2 – r2 = 6 см, R2 = 8 см, у колеса 3 – r3 = 12 см, R3 = 16 см. На ободьях колес расположены точки A, B и C. Задан закон движения груза: s5 = t 3 – 6t (см). Положительное направление для s5 – вниз.
Определить в момент времени t = 2 скорости точек A, C; угловое ускорение колеса 3; ускорение точки B и ускорение рейки 4.
Указания. Эта задача – на исследование вращательного движения твердого тела вокруг неподвижной оси. При решении задачи учесть, что проскальзывание в ременной передаче и в точках сцепления колес отсутствует. То есть скорости точек колес, находящихся в зацеплении равны, а скорости точек ремня равны скорости точек, лежащих на ободе колес, связанных ременной передачей.
Дано:
t = 2 с; r1 = 2 см, R1 = 4 см; r2 = 6 см, R2 = 8 см; r3 = 12 см, R3 = 16 см; s5 = t 3 – 6t (см).
Определение скорости и ускорения груза 5
Груз 5 совершает поступательное движение. Поэтому скорости (и ускорения) всех его точек равны. В условии задачи задано смещение s груза относительно некоторого начального положения. Дифференцируя по времени t , находим зависимость скорости точек груза от времени:
.
Дифференцируя скорость груза по времени, находим зависимость ускорения груза от времени:
.
Находим скорость и ускорение груза в заданный момент времени :
см/с;
см/с 2 .
Определение угловых скоростей и ускорений колес
Груз 5 связан нитью с внутренним ободом колеса 3. Поэтому скорости точек внутреннего обода колеса 3 равны скорости груза:
.
Отсюда находим угловую скорость колеса 3 для произвольного момента времени:
.
Здесь подразумевается, что и являются функциями от времени t . Дифференцируя по t , находим угловое ускорение колеса 3:
.
Находим значения угловой скорости и углового ускорения в момент времени с. Для этого подставляем найденные значения и при с:
с –1 ;
с –2 .
Рассмотрим колесо 2. Его внутренний обод связан нитью с внешним ободом колеса 3. Поэтому скорости точек на этих ободьях равны:
. Отсюда
.
Дифференцируя по времени, находим угловое ускорение колеса 2 в произвольный момент времени:
.
Подставляем значения для с:
с –1 ;
с –2 .
Рассмотрим колесо 1. Его внутренний обод находится в зацеплении с внешним ободом колеса 2. Поэтому скорости точек на этих ободьях равны:
. Отсюда
.
Дифференцируя по времени, находим угловое ускорение колеса 1 в произвольный момент времени:
.
Подставляем значения для с:
с –1 ;
с –2 .
Итак, мы нашли:
ω 1 = 5.3333 с –1 , ω 2 = 1.3333 с –1 , ω 3 = 0.5 с –1 , ε 1 = 10.6667 с –2 , ε 2 = 2.6667 с –2 , ε 3 = 1 с –2 .
Определение скоростей точек A и C
Точка A лежит на окружности радиуса R1 с центром в точке O1, расположенной на оси вращения. Поэтому скорость этой точки направлена по касательной к окружности и по абсолютной величине равна
см/с.
Точка C лежит на окружности радиуса R3 с центром O3 на оси вращения. Скорость этой точки:
см/с.
Определение ускорения точки B
Точка B лежит на окружности радиуса R2 с центром O2, расположенном на оси вращения. Касательное (или тангенциальное) ускорение этой точки направлено по касательной к окружности в сторону, на которую указывает угловое ускорение (по часовой стрелке). По абсолютной величине оно равно
см/с 2 .
Нормальное ускорение всегда направлено к центру окружности. По абсолютной величине оно равно
см/с 2 .
Полное ускорение равно векторной сумме касательного и нормального ускорений:
.
Поскольку касательное ускорение перпендикулярно нормальному, то для абсолютной величины полного ускорения имеем:
см/с 2 .
Определение ускорения рейки 4
Рейка 4 движется поступательно по направляющим. Она находится в зацеплении с внешним ободом колеса 1. Поэтому ее скорость равна скорости точек внешнего обода колеса 1:
.
Дифференцирую по времени, получаем ускорение рейки в произвольный момент времени:
.
Подставляем численные значения для момента времени t = 2 с :
см/с 2 .
см/с; см/с; с –2 ; см/с 2 ; см/с 2 .
Автор: Олег Одинцов . Опубликовано: 25-10-2019
источники:
http://mydocx.ru/6-108008.html
http://1cov-edu.ru/mehanika/kinematika/opredelenie-skorostej-i-uskorenij-pri-vraschatelnom-dvizhenii/
Содержание книги
Предыдующая страница
§3. Криволинейное движение. Плоскопараллельное движение твердого тела
3.6 Плоскопараллельное движение
Движение твердого тела называется плоскопараллельным, если траектории движения всех его точек являются плоскими кривыми, лежащими в параллельных плоскостях.
Плоскопараллельное движение твердого тела можно представить как суперпозицию поступательного движения и вращения вокруг оси, направление которой не изменяется. Наглядными примерами такого движения являются качение колеса, движение книги без отрыва от стола и т.д.
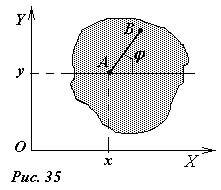
Для описания положения абсолютно твердого тела при плоскопараллельном движении необходимо задать две декартовые координаты какой-либо точки тела [1] и угол его поворота, то есть плоскопараллельное движение обладает тремя степенями свободы.
Выберем внутри тела две точки A, B; зададим координаты xA, yA точки A и угол φ, который образует отрезок AB с направлением оси X. Три числа xA, yA и φ однозначно определяют положение тела на плоскости, следовательно, являются его координатами. Зная эти координаты, можно определить положение в пространстве любой другой точки твердого тела путем геометрических построений.
Покажем теперь, как можно найти скорость любой точки твердого тела при плоскопараллельном движении (рис. 36).
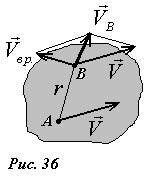
Разложим движение на две составляющих — поступательное движение, скорость которого обозначим (~vec V) , и вращение вокруг оси, проходящей через точку A, с угловой скоростью (~omega = frac{Delta varphi}{Delta t}) . Тогда скорость любой другой точки тела (например, B) является векторной суммой скоростей поступательного и вращательного движений —
(~vec V_B = vec V + vec V_{BP}) , (1)
причем вектор скорости вращательного движения направлен перпендикулярно отрезку AB и равен по абсолютной величине VBP = ωr, где r расстояние от точки B до оси вращения.
Рассмотрим катящееся без проскальзывания колесо радиуса R (рис. 37).

Пусть его центр движется со скоростью (~vec V). Найдем скорости некоторых других точек колеса. Для этого представим движение колеса как сумму поступательного движения его центра и вращения вокруг его оси. Так как движение происходит без проскальзывания, то угловая скорость вращения определяется формулой (~omega = frac{upsilon}{R}). Для точек, находящихся на ободе колеса линейная скорость вращательного движения равна по модулю скорости поступательного движения, так как для них расстояние до оси вращения равно радиусу колеса, поэтому (~V_{BP} = omega r = frac{V}{R} R = V) . Однако, направление этой скорости различно для разных точек. Так, для точки A скорость вращательного движения направлена горизонтально, также как и скорость поступательного движения. Поэтому суммарная скорость точки A равна 2V и направлена горизонтально. Скорость вращательного движения точки B направлена вертикально вверх, поэтому ее полная скорость направлена под углом 45° к горизонту, а ее модуль (~V_B = V sqrt{2}) . Очень интересна точка касания с поверхностью C : скорость ее вращательного движения направлена горизонтально в сторону противоположную скорости поступательного движения, поэтому ее полная скорость равна нулю.
Так как разложение движения на составляющие не является однозначным, можно теперь представить качение колеса как сумму движения точки C и вращения вокруг оси, проходящей через эту точку. Мы показали, что скорость точки C равна нулю, поэтому появляется возможность рассматривать движение колеса как чистый поворот вокруг точки C. Правда, это возможно в течение только бесконечно малого промежутка времени, потому, что в следующий момент точкой касания будет другая точка колеса. Множество точек твердого тела, скорости которых в данный момент равны нулю, образуют мгновенную ось вращения тела. Такая ось существует при любом движении твердого тела. Правда положение этой оси постоянно изменяется, поэтому для вычисления координат точек такое представление движения не дает особых преимуществ. Но для вычисления скоростей точек, рассматривать плоскопараллельное движение как чистый поворот очень удобно.
Легко доказать, что угол поворота тела не зависит от того, относительно какой оси мы его рассматриваем, следовательно, и угловая скорость не зависит от оси. С этой точки зрения, скорость любой точки колеса определяется формулой V = ωr’ , где r’ — расстояние от данной точки до мгновенной оси вращения.
Рассмотренная задача об определении скоростей точек катящегося колеса может быть легко решена, если рассматривать его движение как поворот вокруг точки C (рис. 38): точка A находится на расстоянии 2R от мгновенной оси вращения, поэтому ее скорость равна VA = 2Rω = 2V; точка B находится на расстоянии (~R sqrt{2}) от оси, ее скорость (~V sqrt{2}). Направления векторов скоростей также совпадают с полученными ранее.
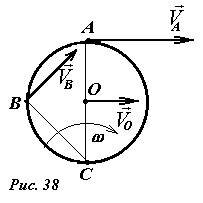
Таким образом, мы имеем два примерно одинаковых по сложности способа описания движения твердого тела: первый — суперпозиция поступательного и вращательного движений: второй — поворот вокруг мгновенной оси.
Примечания
- ↑ С точки зрения кинематического описания выбор этой точки произволен — только следует стремиться к тому, чтобы траектория этой точки была попроще. Далее мы укажем как можно легко найти такую точку.
Следующая страница
Пример решения задачи по определению величины и направления скорости и полного ускорения точки колеса, для момента времени, когда угол будет равен заданному значению.
Задача
Кривошип ОА, вращаясь вокруг оси, перпендикулярной плоскости чертежа и проходящей через точку О, приводит в движение колесо II, которое катится без скольжения по неподвижному колесу I.
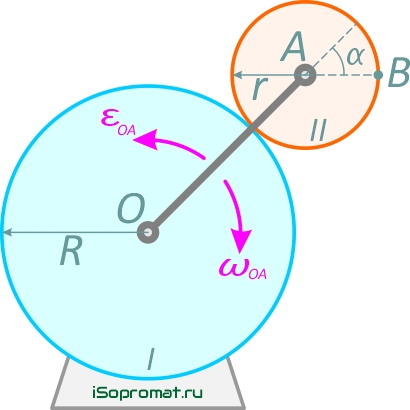
Рис. 2
Найти скорость и ускорение точки В колеса II, для момента времени, когда угол α=45°,
если R=40 см, r=20 см, ωOA=4 с-1, εOA=2 с-2 (рис. 2).
Другие примеры решений >
Помощь с решением задач >
Решение
Теория по теме
Колесо II движется в плоскости чертежа, т.е. совершает плоскопараллельное движение.
По условию, колесо I неподвижно, значит, точка соприкосновения колес является МЦС для колеса II.
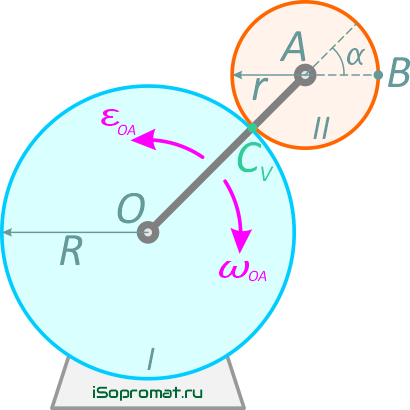
Рис. 2.10
Обозначим ее как CV (эта точка не принадлежит кривошипу ОА). Скорость точки В определяется выражением
![]()
и направлена перпендикулярно отрезку ВСV, в сторону вращения колеса II (рис. 2.11)
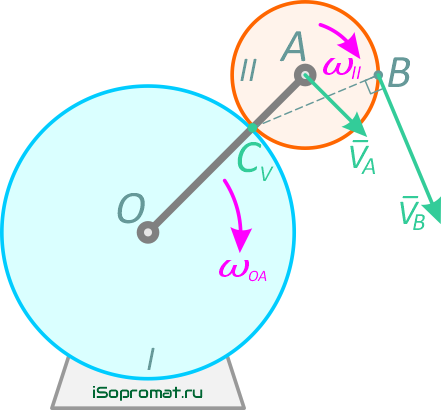
Рис. 2.11
Для определения угловой скорости ωII запишем выражение для скорости точки А.
С другой стороны, точка А принадлежит кривошипу ОА. Скорость точки А, принадлежащей кривошипу, определяется выражением
![]()
и направлена ⊥ОА в сторону вращения кривошипа ОА. Из этих рассуждений следует:
Найдем скорость точки В, используя теорему о скоростях точек плоской фигуры. Для этого примем точку А за полюс.
Тогда
![]()
Величина и направление скорости точки А определяются из условий движения кривошипа ОА.
VA=ωOA×OA
и вектор VA⊥ОА и направлен в сторону вращения кривошипа (рис. 2.12).
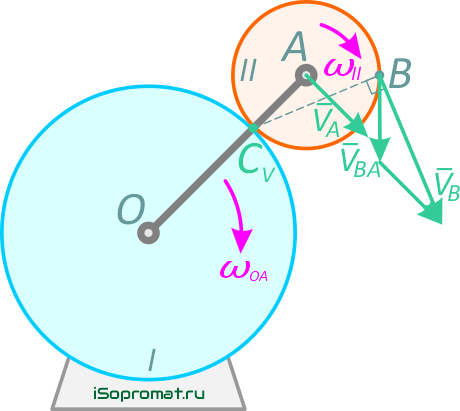
Рис. 2.12
Скорость VBA — это скорость точки В во вращательном движении вокруг полюса А.
Величина скорости
VBA=ωII×r=12×20=240 см/с
и этот вектор направлен ⊥ отрезку АВ в сторону вращения колеса II.
Чтобы сложить VA и VBA, перенесем вектор VA в конец вектора VBA. Соединяя начало вектора VBA с концом вектора VA, получим вектор VB. Из построения:
Определим ускорение точки В.
Согласно теореме об ускорении точки плоской фигуры, ускорение точки В можно определить из выражения
![]()
где aA — ускорение точки А, принятой за полюс;
aBA — ускорение точки В во вращательном движении, вокруг полюса А.
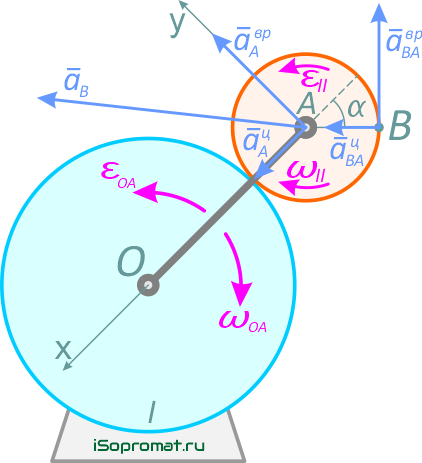
Рис. 2.13
Точка А – принадлежит колесу II и кривошипу ОА, движение которого известно, тогда
Ускорение aBA (ускорение во вращательном движении) состоит из двух слагаемых:
![]()
где
Найдем εII по определению:
Подставляя числовые значения, получим
тогда
Ускорение точки В найдем, спроецировав все векторы уравнения
![]()
на выбранные оси координат ОХ и OY.
Углы, которые составляют вектор ускорения aB с осями ОХ и OY, определим через направляющие косинусы.
Скорость и ускорение точки В колеса II, для момента времени, когда угол α=45° найдены.
Другие примеры решения задач >