Для построения
линии пересечения двух поверхностей
вращения, оси которых пересекаются,
иногда нецелесообразно использовать
вспомогательные секущие плоскости,
т.к. они могут не дать вспомогательных
линий сечения, которые проецировались
бы графически простыми линиями.
Прежде чем приступить
к построению линии пересечения
поверхностей вращения рассмотрим
соосные поверхности.
Соосными называются
поверхности, имеющие общую ось.
Две соосные
поверхности пересекаются по окружностям,
перпендикулярным общей оси.
Пример: соосные
сфера и конус вращения пересекаются по
линиям т и
п. Точки
А и В, вращаясь
вокруг общей оси I,
дадут окружности, принадлежащие конусу
и сфере, которые и будут линиями их
пересечения. Свойство сферы

пересекать соосную
с ней поверхность вращения по окружностям
(параллелям поверхности) положено в
основу способа применения сфер как
посредников при нахождении линии
пересечения поверхностей вращения. Для
того чтобы вспомогательная секущая
сфера пересекала по параллелям обе
заданные поверхности, центр сферы должен
лежать в точке пересечения осей заданных
поверхностей. Если оси поверхностей
вращения параллельны плоскости проекций,
то параллели пересечения вспомогательной
сферы с этими поверхностями проецируются
на эту плоскость в прямые линии. Это —
основа метода секущих концентрических
сфер.
Пример: определить
линию пересечения тора и конуса (рис.
87).
Заданы поверхности
вращения, оси их пересекаются в точке
О и
по условию лежат в плоскости, параллельной
фронтальной плоскости проекций.
Из точки О2
проведем
сферу произвольного радиуса R1,,
которая тор
пересекает по линиям к2
и l2,
конус по линиям т2
и п2
в пересечении
которых определены точки А2
и В2,
которые
принадлежат фронтальной проекции линии
пересечения тора и конуса.
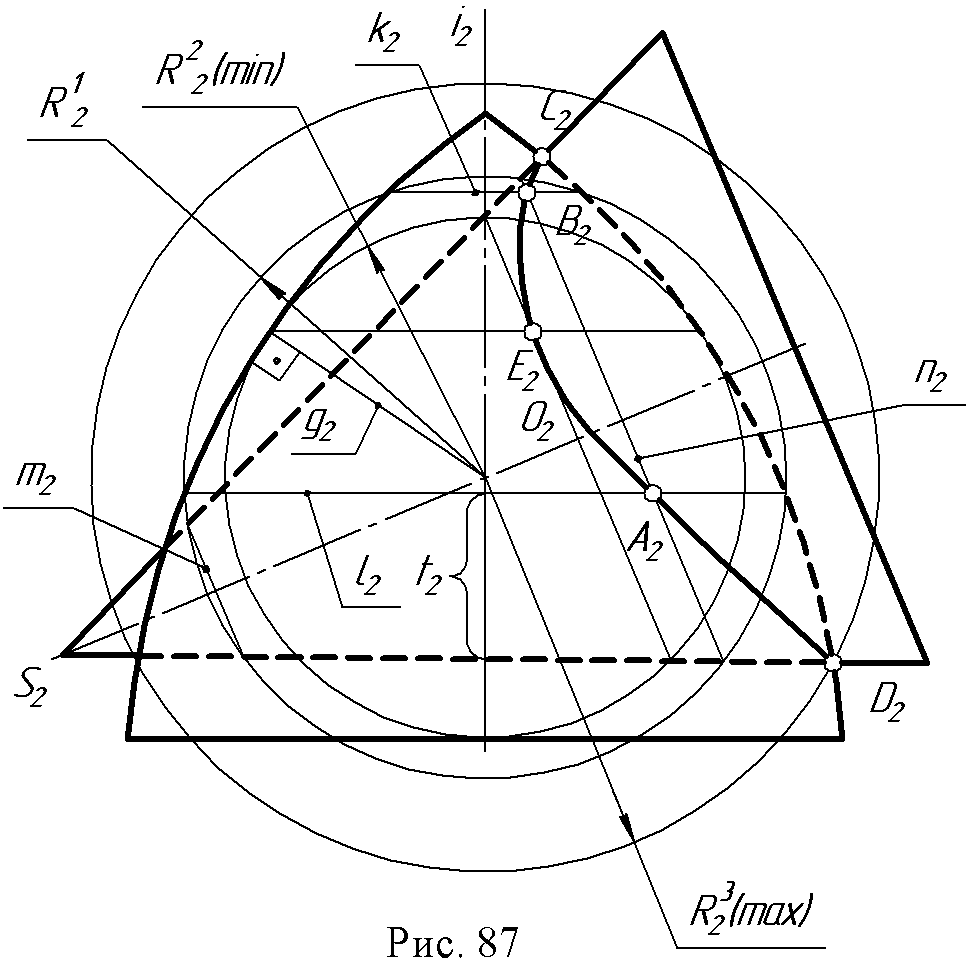
Изменяя радиус
вспомогательных сфер, можно получить
какое угодно число точек линии пересечения.
Для определения максимального радиуса
сферы, необходимо отметить точки
пересечения очерковых линий, замерить
расстояние от точки O2
до этих точек
и наибольшее из этих расстояний будет
максимальным радиусом сферы (R3).
Для определения
радиуса наименьшей сферы нужно из точки
O2
провести
нормали к очерковым линиям каждой
поверхности (g2
и t2).
Больший из
полученных отрезков и будет минимальным
радиусом вспомогательной сферы (R2).
При помощи
этой сферы найдена точка Е2.
Именно с нее
следует начинать искать точки линии
пересечения поверхностей. Найденные
точки соединяют плавной линией. Если
нужно построить проекции этой линии на
другие плоскости проекций, то это легко
сделать, связав каждую точку пересечения
с окружностью, лежащей на этой или другой
поверхности вращения.
12.4. Вопросы для самопроверки.
-
Какие линии
получаются при пересечении двух кривых
оверхностей? -
Назовите частные
случаи пересечения поверхностей
вращения второго порядка. Какой вид
имеют линии пересечения в этих случаях? -
Как пересекаются
соосные поверхности вращения? -
В каких случаях
применяется метод соосных концентрических
сфер? В чём он заключается?
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
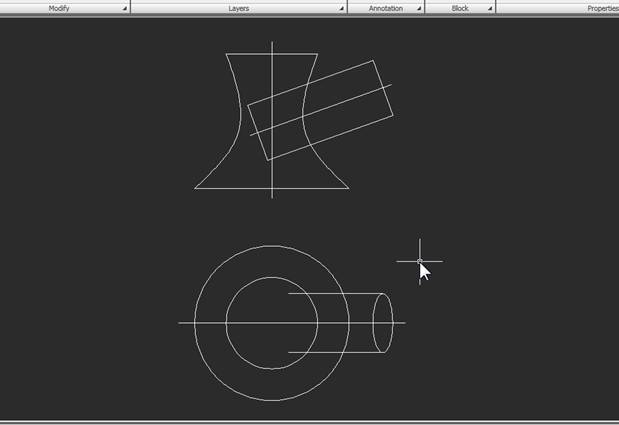
Еще один метод построения линии пересечения поверхностей вращения – метод сфер. Он применяется в случаях, когда метод секущих плоскостей использовать нецелесообразно – например, когда оси одной или обеих поверхностей вращения расположены так, что при пересечении этих поверхностей с плоскостями, параллельными плоскостям проекций, образуются сложные фигуры. Один из таких случаев – когда оси поверхностей вращения пересекаются в пространстве. Пусть одна из поверхностей – цилиндр, а вторая – тело вращения, образованное кривой 2-го порядка. Оговоримся, что для применения метода сфер необходимо привести чертеж к такому виду, когда оси вращения обеих поверхностей параллельны одной из плоскостей проекций.
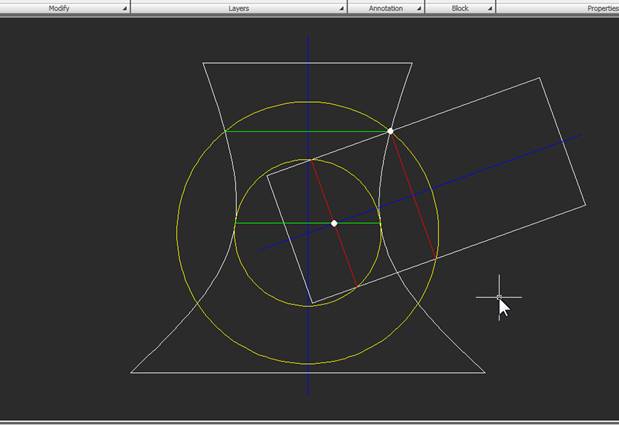
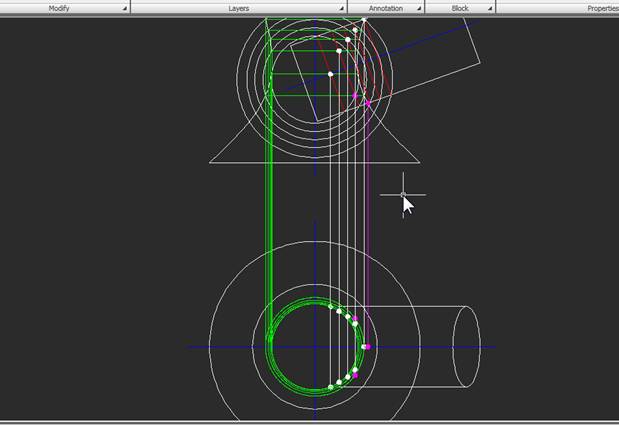
1. Пусть исходный чертеж выглядит так:
2. При построениях такого рода целесообразно применять концентрические сферы-посредники, центры которых расположены в точке пересечения осей исходных тел вращения. Эти сферы, пересекаясь с исходными телами, образуют окружности, а искомые точки линии пересечения будут общими точками пар окружностей, принадлежащим двум телам. Построим «крайние» сферы – самую большую и самую малую из всего диапазона. Видно, что самая большая из сфер пройдет через наиболее удаленную от центра точку пересечения поверхностей, а самая малая будет касаться «внутренней» поверхности одного из тел (сферы меньшего диаметра уже не пересекают оба тела, т.е. в построении не участвуют).

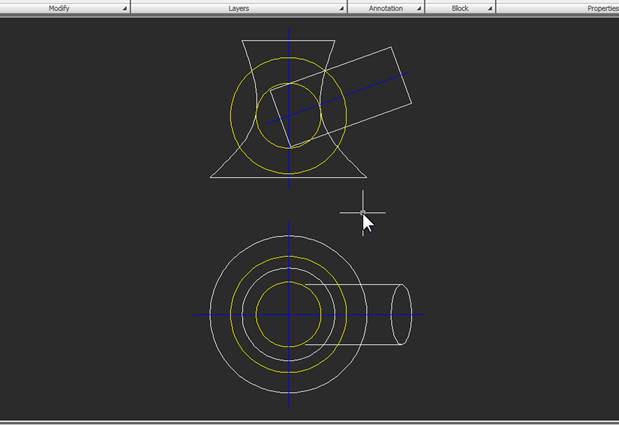
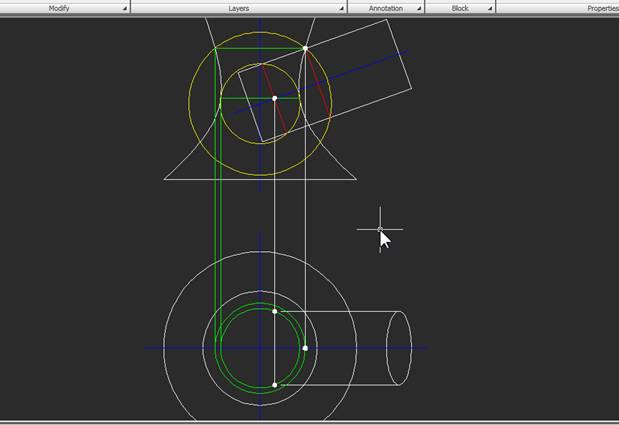
Эти сферы дадут нам первые точки пересечения поверхностей. Находим их так: сначала строим линии пересечения сферы-посредника с каждым из тел на фронтальном виде. Эти линии – окружности, которые на фронтальном виде превращаются в прямые:
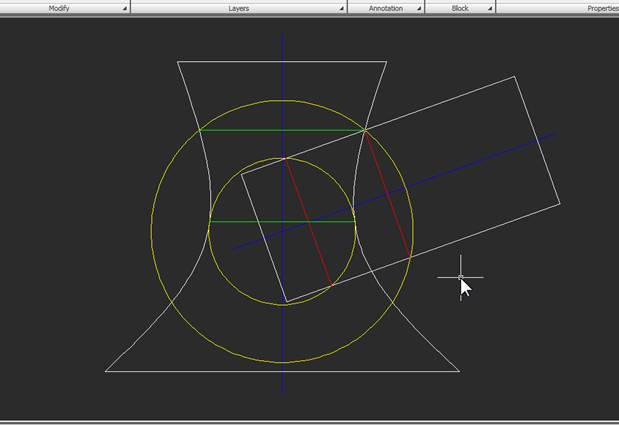
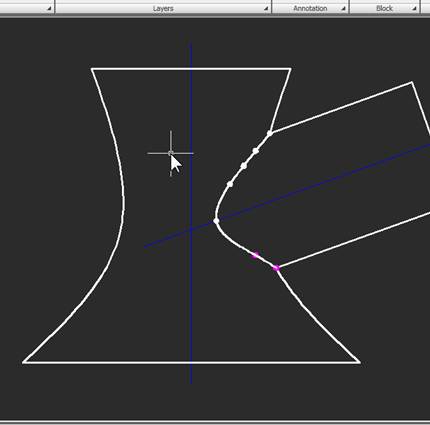
3. Пересечение двух линий, образованных одной сферой, даст соответствующую точку искомой линии пересечения поверхностей (поскольку линия симметрична относительно вертикальной плоскости, в которой лежат оси обоих тел, на фронтальном виде будем строить только видимую часть линии. Итак, вот две первые точки:
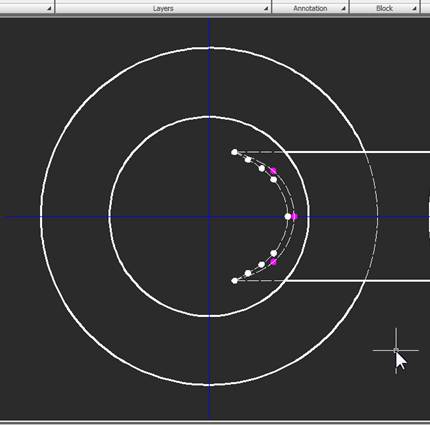
Переносим эти точки на вид сверху. Здесь важно понимать следующее: точки лежат на окружностях, образованных пересечением сфер-посредников с каждым из тел, причем это утверждение справедливо для любых проекций. Поэтому нам нужно построить эти окружности на виде сверху для любого из тел (очевидно, что цилиндр в этом случае неудобен, поскольку его ось наклонена) и перенести на них точки с фронтального вида. Сферы, изображенные на виде сверху, можно удалить, чтобы они не мешали построениям:
4. Построим еще несколько сфер-посредников, охватывающих всю область пересечения тел. Одна из сфер должна пройти через вторую «пиковую» точку – самую нижнюю точку пересечения поверхностей. Кстати, строить эту сферу необязательно – эта точка, как и верхняя, явно видна на чертеже. Вот результаты построений для фронтальной проекции:
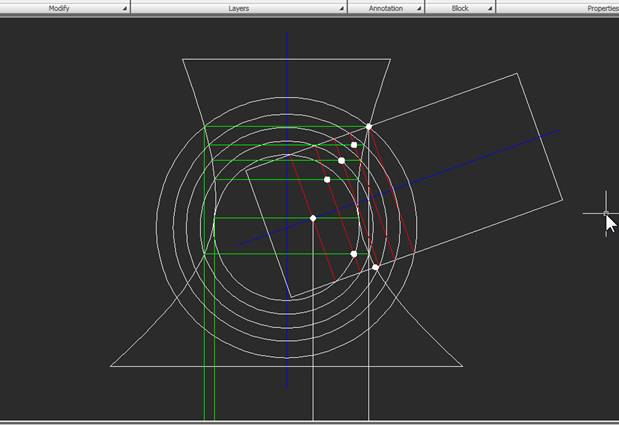
И для вида сверху:
Для того, чтобы не запутаться в множестве линий построения, можно удалять их после нахождения каждой точки. Также полезно выделить точки, находящиеся на виде сверху ниже «границы видимости», другим цветом. Эти точки на фронтальном виде расположены ниже оси цилиндра. Точка, отделяющая «нижние» точки от «верхних», лежит на оси цилиндра. В нашем случае она практически совпадает с точкой, лежащей на малой сфере, вообще же она требует отдельного построения:
[ads]
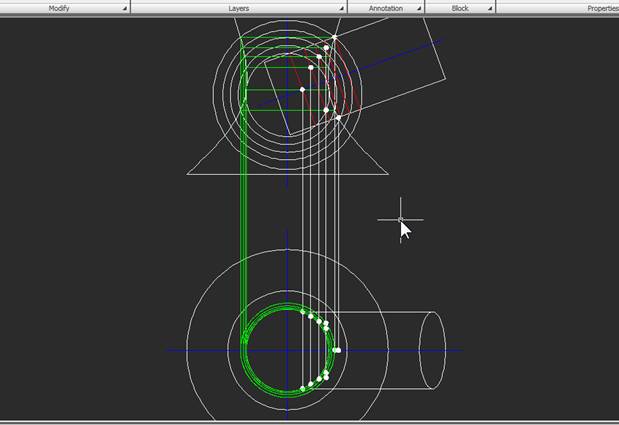
После соединения полученных точек командой Spline и удаления всех вспомогательных линий получим такие результаты:
Стоит отметить, что команда Spline может не сразу дать правильное отображение линии пересечения, особенно на виде сверху. Может оказаться целесообразным рисовать отдельно «правую» и «левую» части кривой.
5. Осталось только сравнить наши построения с пересечением двух поверхностей, которое Autocad строит автоматически. Для этого изобразим исходные тела с помощью команд 3D-моделирования, объединим их и расположим рядом с полученными чертежами:
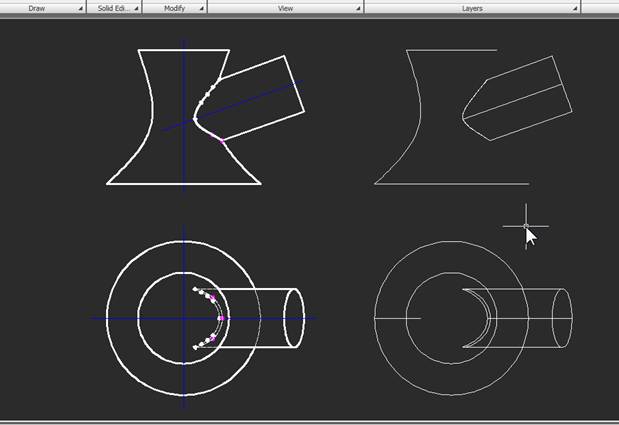
Как видим, метод сфер позволяет достаточно адекватно изображать пересечение сложных поверхностей вращения. И хотя сегодня он носит достаточно иллюстративный характер, разобраться в нем очень полезно для понимания основ геометрии и трехмерного моделирования.
31 869
Оцените материал по 5-ти бальной шкале:
Построение линии пересечения конусов методом концентрических сфер
На рисунке ниже изображены два конуса вращения. Их оси i1 и i2, пересекаясь в точке O, образуют плоскость α(i1∩i2), которая параллельна фронтальной плоскости проекций π2.

Для построения линии пересечения конусов, показанных на рисунке, целесообразно использовать метод концентрических сфер. Применение данного метода возможно в результате выполнения следующих условий:
- пересекаются поверхности вращения (в частности, конус с конусом, конус с тором или цилиндром и т.д.);
- оси поверхностей, пересекаясь между собой, образуют плоскость, которая параллельна одной из плоскостей проекций (в рассматриваемом примере пл. α(i1∩i2)∥π2).
Алгоритм построения линии пересечения
Построение линии пересечения начинают с нахождения характерных точек, которые определяют ее границы и видимость относительно плоскостей проекций.
Определение характерных точек
Плоскость α, образованная пересекающимися осями i1 и i2, является общей плоскостью симметрии двух конусов. На рисунке показан ее горизонтальный след h0α. Пересечение пл. α с конусами происходит по образующим S2A, S2B и S1C, S1D. Данные образующие ещё называют очерковыми, так как они очерчивают границы поверхностей (на фронтальной проекции).

Точки F’’, E’’, G’’, K’’, в которых пресекаются прямые S’’2A’’, S’’2B’’ с прямыми S’’1C’’ и S’’1D’’, определяют границы линии пересечения конусов в её проекции на плоскость π2. Для нахождения F’, E’, G’ и K’ проводят линии связи из F’’, E’’, G’’, K’’ до горизонтального следа h0α.
Определение промежуточных точек
Воспользуемся методом концентрических сфер для нахождения множества промежуточных точек линии пересечения. Центром, из которого проводятся вспомогательные сферы, является точка O пересечения осей i1 и i2 рассматриваемых конусов.
Радиус Rmax наибольшей сферы, применяемой в построениях, равен длине отрезка O’’G’’ – расстоянию от точки O до наиболее удаленной от нее точки G пересечения очерковых образующих.
Сфера минимального радиуса Rmin – это сфера, вписанная в один из конусов и пересекающая другой. На рисунке ниже Rmin= O’’H’’, где O’’H’’⊥ S’’2B’’.

Рассмотрим построение точек 1, 2, 3 и 4. Сфера радиусом Rmin пересекается с конусом, в которой она вписана, по окружности. Данная окружность проецируется на фронтальную плоскость проекций в виде отрезка P’’H’’. Кроме того, сфера радиусом Rmin пересекается со вторым конусом по двум окружностям, диаметры которых соответственно равны длинам отрезков M’’N’’ и T’’L’’. Таким образом, на поверхности сферы лежат три окружности, которые пересекаются в общих для двух конусов точках 1, 2, 3 и 4.
Фронтальные проекции 1’’, 2’’, 3’’, 4’’ находятся на пересечении отрезков M’’N’’, T’’L’’ с P’’H’’. Для нахождения горизонтальных проекций 1’, 2’, 3’, 4’ точек 1, 2, 3, 4 на плоскости проекций π1 из центра O’ проводим две окружности с диаметрами M’’N’’ и T’’L’’. Учитывая принадлежность точек соответствующим окружностям, по линиям связи определяем их горизонтальные проекции, как это показано на рисунке выше.
С помощью вспомогательной сферы радиусом Rvar, где Rmin ≤ Rvar ≤ Rmax, найдены точки 5 и 6. Как видно из построений, они находятся на пересечении двух окружностей, которые проецируются на фронтальную плоскость в виде отрезков W’’U’’ и Q’’V’’.
В описываемом способе решения каждая сфера играет роль посредника, содержащего на своей поверхности кривые (окружности), принадлежащие пересекающимся конусам. Действуя в соответствии с приведенным выше алгоритмом, необходимо найти такое количество точек, которое позволит определить геометрическую форму линии пересечения на каждой из проекций.

Найденные точки соединяем плавными кривыми с учетом их видимости. Как видно на рисунке, в результате пересечения конусов образовались две замкнутые линии. Они показаны красным цветом.
Метод вспомогательных сфер
Применение вспомогательных секущих сфер основано на свойстве соосных поверхностей вращения. Поверхности, оси которых совпадают, называются соосными (рис. 121).
Соосные поверхности вращения пересекаются по окружностям, лежащим в плоскостях, перпендикулярных их общей оси. Если общая ось поверхностей вращения параллельна одной из плоскостей проекций, то окружности на эту плоскость проецируются в виде отрезков прямых, соединяющих точки пересечения очерковых линий поверхностей (рис. 121).
Построить линию пересечения поверхностей с помощью вспомогательных секущих сфер можно двумя способами. В одном из них используются сферы, проведённые из одного общего центра, а в другом — сферы, проведённые из разных центров. В первом случае имеем способ концентрических сфер, во втором — способ эксцентрических сфер.
Способ концентрических сфер
Применяется в том случае, когда:
- • заданы две поверхности вращения;
- • оси поверхностей пересекаются;
- • плоскость осей параллельна одной из плоскостей проекций.
Пример 1. Построить линию пересечения конуса с цилиндром
Имеем две поверхности вращения с пересекающимися осями i и у, лежащими в плоскости 2 || щ. Следовательно, можно использовать вспомогательные концентрические сферы. Они проводятся в том поле, которому параллельна плоскость осей, т. е. в Каждая сфера пересечёт поверхности по окружностям, проецирующимся на Л1 в виде хорд, перпендикулярных осям конуса и цилиндра. При этом проводятся те из проекций окружностей, которые расположены в пределах изображения другой поверхности.
Определим центр сфер. Поскольку они должны быть соосны с каждой из заданных поверхностей, то центр 0 сфер находится в точке пересечения осей конуса и цилиндра. Очерковые образующие первых проекций конуса и цилиндра лежат в одной плоскости ?. Следовательно, точки Ah Bj, С], Dj их пересечения принадлежат искомой линии. А2, В2, С2, D2 е Ъ2.
Определим максимальный и минимальный радиусы сфер. Очевидно, очерк сферы радиусом Rmax пройдет через самую удаленную от 0 характерную точку А. Очерк сферы радиусом rmin должен касаться очерковых образующих одной поверхности, пересекая одновременно очерковые другой поверхности. Опустим из центра 0 перпендикуляры на очерковые образующие обеих поверхностей. Больший из этих перпендикуляров и будет Гщщ. Так как сфера коснулась конуса, то конус шире цилиндра. Тогда цилиндр пройдет сквозь конус, и в пересечении получатся две линии — линия входа цилиндра в конус и линия выхода его из конуса. А характерные точки Е и Fb найденные при помощи сферы радиусом rmin, являются крайними правой и левой этих линий. Проводя сферы радиусами rmjn и F2, F2 лежащие на очерках а2 и Ь2 тора, определены при помощи сферы 3. Её радиус равен расстоянию от центра 02 до крайних точек вертикального диаметра окружности основания тора. Очерки а2 и Ь2 будут проекциями линии пересечения сферы 3 с тором. Проекции а и Ь совпадут с осевой окружностью тора. Сфера 3 пересечёт конус по окружности п, проецирующейся на щ отрезком п. При пересечении п с осевой окружностью тора получаем Е и F. По линии связи переносим их на а2 и Ь2. Для уточнения формы искомой линии найдено ещё несколько промежуточных точек.
Построенная линия в первом поле видима, во втором — невидима. Очерки а2 и Ъ2 обводим до точек Е2, F2 и Е2 F2 с учётом их видимости.
Построение линии пересечения конусов методом концентрических сфер
На рисунке ниже изображены два конуса вращения. Их оси i1 и i2, пересекаясь в точке O, образуют плоскость α(i1∩i2), которая параллельна фронтальной плоскости проекций π2.
Для построения линии пересечения конусов, показанных на рисунке, целесообразно использовать метод концентрических сфер. Применение данного метода возможно в результате выполнения следующих условий:
- пересекаются поверхности вращения (в частности, конус с конусом, конус с тором или цилиндром и т.д.);
- оси поверхностей, пересекаясь между собой, образуют плоскость, которая параллельна одной из плоскостей проекций (в рассматриваемом примере пл. α(i1∩i2)∥π2).
Алгоритм построения линии пересечения
Построение линии пересечения начинают с нахождения характерных точек, которые определяют ее границы и видимость относительно плоскостей проекций.
Определение характерных точек
Плоскость α, образованная пересекающимися осями i1 и i2, является общей плоскостью симметрии двух конусов. На рисунке показан ее горизонтальный след h0α. Пересечение пл. α с конусами происходит по образующим S2A, S2B и S1C, S1D. Данные образующие ещё называют очерковыми, так как они очерчивают границы поверхностей (на фронтальной проекции).
Точки F’’, E’’, G’’, K’’, в которых пресекаются прямые S’’2A’’, S’’2B’’ с прямыми S’’1C’’ и S’’1D’’, определяют границы линии пересечения конусов в её проекции на плоскость π2. Для нахождения F’, E’, G’ и K’ проводят линии связи из F’’, E’’, G’’, K’’ до горизонтального следа h0α.
Определение промежуточных точек
Воспользуемся методом концентрических сфер для нахождения множества промежуточных точек линии пересечения. Центром, из которого проводятся вспомогательные сферы, является точка O пересечения осей i1 и i2 рассматриваемых конусов.
Радиус Rmax наибольшей сферы, применяемой в построениях, равен длине отрезка O’’G’’ – расстоянию от точки O до наиболее удаленной от нее точки G пересечения очерковых образующих.
Сфера минимального радиуса Rmin – это сфера, вписанная в один из конусов и пересекающая другой. На рисунке ниже Rmin= O’’H’’, где O’’H’’⊥ S’’2B’’.
Рассмотрим построение точек 1, 2, 3 и 4. Сфера радиусом Rmin пересекается с конусом, в которой она вписана, по окружности. Данная окружность проецируется на фронтальную плоскость проекций в виде отрезка P’’H’’. Кроме того, сфера радиусом Rmin пересекается со вторым конусом по двум окружностям, диаметры которых соответственно равны длинам отрезков M’’N’’ и T’’L’’. Таким образом, на поверхности сферы лежат три окружности, которые пересекаются в общих для двух конусов точках 1, 2, 3 и 4.
Фронтальные проекции 1’’, 2’’, 3’’, 4’’ находятся на пересечении отрезков M’’N’’, T’’L’’ с P’’H’’. Для нахождения горизонтальных проекций 1’, 2’, 3’, 4’ точек 1, 2, 3, 4 на плоскости проекций π1 из центра O’ проводим две окружности с диаметрами M’’N’’ и T’’L’’. Учитывая принадлежность точек соответствующим окружностям, по линиям связи определяем их горизонтальные проекции, как это показано на рисунке выше.
С помощью вспомогательной сферы радиусом Rvar, где Rmin ≤ Rvar ≤ Rmax, найдены точки 5 и 6. Как видно из построений, они находятся на пересечении двух окружностей, которые проецируются на фронтальную плоскость в виде отрезков W’’U’’ и Q’’V’’.
В описываемом способе решения каждая сфера играет роль посредника, содержащего на своей поверхности кривые (окружности), принадлежащие пересекающимся конусам. Действуя в соответствии с приведенным выше алгоритмом, необходимо найти такое количество точек, которое позволит определить геометрическую форму линии пересечения на каждой из проекций.
Найденные точки соединяем плавными кривыми с учетом их видимости. Как видно на рисунке, в результате пересечения конусов образовались две замкнутые линии. Они показаны красным цветом.
Взаимное пересечение поверхностей в начертательной геометрии с примерами
Содержание:
Взаимное пересечение поверхностей:
При пересечении поверхностей образуется линия, которую принято называть линией взаимного пересечения поверхностей. Эта линия пересечения принадлежит одновременно двум поверхностям. Поэтому построение линии пересечения сводится к определению точек одновременно принадлежащих обеим поверхностям. Для нахождения таких точек используется в общем случае метод вспомогательных секущих поверхностей. Сущность способа заключается в следующем: Пусть задано две поверхности
Общий алгоритм построения линии пересечения поверхностей:
- Введем вспомогательную поверхность Ф.
- Строим линии пересечения поверхности Ф с поверхностями
- Определяем точки пересечения К и М, простроенных линий a и b
- Многократно повторяя эту операцию, найдем ряд точек, принадлежащих одновременно двум поверхностям.
- Соединяем последовательно точки с учетом видимости.
В качестве посредников могут быть приняты как поверхности, так и плоскости, но целесообразно выбирать такие, которые дают наиболее простые линии пересечения с заданными поверхностями.
Взаимное пересечение поверхностей
Линия, общая для двух пересекающихся поверхностей — линия пересечения.
Чтобы определить проекцию линии пересечения, необходимо найти проекции точек, общих для этих поверхностей. Их находят способом вспомогательных секущих плоскостей или вспомогательных сфер.
Если рёбра призмы или ось вращения цилиндра перпендикулярны какой-либо из плоскостей проекций, то на этой плоскости проекций линия пересечения совпадает с контуром основания призмы или цилиндра.
Пересечение двух многогранников
Для построения линии пересечения двух многогранников необходимо определить точки пересечения ребер первого многогранника с гранями второго, затем ребер второго с гранями первого. Полученные точки соединить отрезками прямой с учетом видимости. На рисунке 9.2 заданы поверхности трехгранной призмы DEFD’E’F’ и трехгранной пирамиды SABC. Так как призма F, фронтально-проецирующая, фронтальная проекция линии пересечения совпадает с гранями призмы, поэтому необходимо построить только горизонтальную проекцию. Для этого определяем точки пересечения ребер пирамиды с гранями призмы. Ребро SC пересекает грани призмы в точках I и 2, ребро SB — в точках 3 и 4, ребро SA не пересекает призму. Затем определяем точки пересечения ребер призмы с гранями пирамиды.
По чертежу видим, что только ребро DD’ пресекает поверхность пирамиды. Для определения точек пересечения 5 и б через ребро DD’ проводим горизонтальную плоскость, которая пересекает пирамиду по треугольнику. Точки 5 и 6 получаем, как пересечение DD’ с построенным треугольником.
Полученные точки соединяем с учетом видимости. Видимой считается тот отрезок прямой, который принадлежит двум видимым граням поверхностей.
Как видим, линия пересечения двух многогранников представляет собой пространственную ломаную линию.
В том случае, когда обе гранные поверхности общего положения, последовательность соединения точек вызывает затруднение. Поэтому для соединения точек используется диаграмма Ананова — условные развертки поверхностей (см. учебник).
Пересечение гранной и кривой поверхности
Линия пересечения гранной и кривой поверхности, представляет собой пространственную кривую линию, с точками излома на ребрах многогранника.
Поэтому сначала определяем точки пересечения ребер многогранника с кривой поверхностью, а затем промежуточные точки и соединяем их с учетом видимости. На рисунке 9.3 заданы поверхности трехгранной призмы и кругового конуса.
Так как призма фронтально-проецирующая, фронтальная проекция линии пересечения совпадает с проекцией боковых граней призмы, поэтому необходимо построить только горизонтальную проекцию линии пересечения.
Сначала определяем точки пересечения ребер призмы с поверхностью конуса, а затем находим промежуточные точки, принадлежащие линиям пересечения. Для нахождения точек пересечения, используем горизонтальные плоскости посредники, так как они пересекают конус по окружностям, а призму но прямым линиям. Как видим, в данном случае линия пересечения распадается на две отдельные части.
Пересечение двух кривых поверхностей. Метод вспомогательных секущих плоскостей
Линия пересечения двух кривых поверхностей, представляет пространственную кривую линию. Поэтому для ее построения необходимо определить ряд точек принадлежащих этой лини.
На рисунке 9.4 заданы поверхности конуса и сферы. Точки строятся при помощи горизонтальных плоскостей посредников, которые рассекают обе поверхности но окружностям.
Обязательно находим опорные точки, к которым относятся высшая и низшая точки линии пересечения и точки границы видимости. Так как оси поверхностей лежат в одной фронтальной плоскости, контурные образующие поверхностей пересекаются в точках 1 и 2 — это и будет высшая и низшая точки. Точки границы видимости лежат на экваторе сферы, поэтому точки 3 и 3′ находим с помощью вспомогательной горизонтальной плоскости, проходящей через центр сферы. Она рассекает сферу по экватору, а конус но параллели радиуса R.
Взаимно пересекаясь, они и дают точки 3 и 3′ фронтальную проекцию определяем по вертикальной линии связи на плоскости Затем берем еще две вспомогательные плоскости расположенные выше и ниже плоскости и выполняя, аналогичные построения определяем точки 4 и 5 и 5′. Полученные точки соединяем с учетом видимости.
Пересечение поверхностей вращении. Метод вспомогательных секущих сфер
Способ вспомогательных секущих сфер применяется при следующих условиях:
- Пересекающиеся поверхности являются поверхностями вращения.
- Оси этих поверхностей пересекаются.
- Оси поверхностей параллельны одной из плоскостей проекций.
Перед рассмотрением этого способа разберем понятие соосных поверхностей. Соосными называются поверхности вращения, имеющие общую ось. Соосные поверхности пересекаются по окружностям перпендикулярным оси вращения.
На рисунке 9.5 приведены некоторые из них.
Именно то, что поверхности пересекаются по окружностям, которые проецируются в линии и используется в методе сфер.
Рассмотрим пример на рисунок 9.6. Даны поверхности вращения — конус и цилиндр. Так как оси лежат в одной плоскости, можно определить точки пересечения контурных образующих в точках 1 и 2, как в предыдущем примере.
Однако, для нахождения промежуточных точек, вспомогательные секущие плоскости не подходят, т.к. горизонтальные плоскости рассекут цилиндр по эллипсам, фронтально-нроецирующие — конус по эллипсам. А сам эллипс строить непросто. Поэтому именно в этом случае удобно использовать в качестве посредников — сферы. За центр вспомогательных сфер, принимается точка пересечения осей заданных поверхностей. Далее необходимо определить, размеры радиусов вспомогательных секущих сфер. Максимальный радиус сферы
- — это расстояние от центра сфер до наиболее удаленной точки пересечения контурных образующих (в данном случае точка 1). Минимальный радиус сферы — радиус сферы, которая вписана в одну из поверхностей, а другую пересекает.
В данном случае минимальная сфера вписана в конус. Минимальная сфера касается поверхности конуса по окружности, а цилиндр пересекает по окружности. Нужно, иметь ввиду, что проекции окружностей пересечения перпендикулярны осям вращения. Эти две окружности пересекаются в точке . Фактически таких точек две, они совпадают на фронтальной проекции. Для построения промежуточных точек берем вспомогательные сферы радиусов в пределах от
Они пересекают и поверхность цилиндра, и поверхность конуса по окружностям, которые пересекаясь даюг промежуточные точки. Полученные точки соединяются плавной линией.
Здесь построена только фронтальная проекция. Для построения горизонтальной проекции, если это необходимо, точки строят как лежащие на окружностях полученных радиусов.
Теорема Монжа
Рассмотрим вариант, когда минимальная сфера касается двух поверхностей вращения. В этом случае для построения линии пересечения поверхностей используется теорема Г. Монжа, которая формулируется так:
Если две поверхности вращении второго порядка описаны около третьей или вписаны в нее, то линии их пересечении распадается на две плоские кривые второго порядка. Плоскости этих кривых проходит через прямую, соединяющую точки пересечении линий касании.
В соответствии с этой теоремой линии пересечения конуса и цилиндра описанного около сферы (рисунок 9.7) будут плоскими кривыми -эллипсами, фронтальные проекции которых изображаются прямыми проходящими через — точки линий пересечения окружностей касания.
Пересечение поверхностей вращения с многогранниками
Внешние и внутренние формы большинства предметов образуются сочетанием нескольких поверхностей. Пересекаясь между собой, они образуют линии, которые принято называть линиями перехода.
На рис. 9.1 изображена деталь с несколькими линиями перехода. Линия 1 является границей между плоской и торовой поверхностями, 2 — торовой и конической, 3 — конической и плоскими (гранями призмы), 4 и 5 — торовой поверхностью корпуса и цилиндрическими поверхностями патрубков.
Рисунок 9.1 – Корпус с линиями перехода
Линия пересечения многогранника с телом вращения в общем случае состоит из отдельных участков кривых линий, получающихся при пересечении граней многогранника с поверхностью вращения. Точки перехода от одного участка к другому находятся в пересечении ребер многогранника с телом вращения и называются точками излома. Участок линии пересечения может быть и прямой линией в случае пересечения линейчатой поверхности вращения гранью многогранника по образующей.
При проницании (полном пересечении) получаются две замкнутые линии пересечения. Они могут быть плоскими (поверхность вращения проницает одну грань) или пространственными, состоящими из нескольких плоских кривых с точками излома в местах пересечения поверхности вращения ребрами многогранника.
При врезании (неполном пересечении) получается одна замкнутая пространственная линия.
Таким образом, в соответствии с указанным выше, задачи данной темы решаются по следующему плану:
- Определяются точки излома линии пересечения, являющиеся точками пересечения ребер многогранника с поверхностью вращения;
- Находятся точки принадлежащие линиям пересечения отдельных граней многогранника с телом вращения. При этом сначала следует найти характерные (опорные) точки кривых. Это точки, проекции которых отделяют видимую часть проекции линии пересечения от невидимой, это проекции наивысших и наинизших точек линии пересечения, ближайших и наиболее удаленных, крайних слева и справа на проекциях линии пересечения;
- Определение видимости линии пересечения поверхностей и их очерков. Видимость проекций участков линии пересечения определяется из условия расположения их на видимой стороне каждой поверхности.
При построении точек линии пересечения многогранников с телами вращения используют вспомогательные секущие плоскости. Их располагают так, чтобы они пересекали данные поверхности по простым для построения линиям (прямым или окружностям).
Рассмотрим линии пересечения поверхности прямой трехгранной призмы с поверхностью конуса вращения. Боковые грани призмы являются фронтально-проецирующими плоскостями, а ось конуса перпендикулярна горизонтальной плоскости проекций.
Призму можно рассматривать, как три плоскости, проходящие через ее грани, а задача сводится к нахождению линий пересечения этих плоскостей с конусом.
Рисунок 9.2 — Пересечение трехгранной призмы с конусом
Пример. Построить линию пересечения поверхности тора с поверх-ностью трехгранной призмы (рис. 9.3).
Решение. Боковые грани призмы являются фронтально-проецирующими плоскостями и фронтальная проекция линии пересечения совпадают с проекцией боковой поверхности призмы. Из фронтальной проекции видно, что в данном случае имеет место проницание тора призмой (две замкнутые линии пересечения).
На рис. 9.3 рассмотрен пример пересечения поверхностей тора и треугольной призмы [2].
По двум заданным проекциям строим третью – профильную.
Рисунок 9.3 – Построение линии пересечения трехгранной призмы с тором
Заданная призма – горизонтально-проецирующая. Так как грани призматического отверстия перпендикулярны горизонтальной плоскости проекций, то на чертеже известна горизонтальная проекция линии пересечения, она совпадает с вырожденной проекцией поверхности призмы.
Следовательно, линия пересечения совпадает с горизонтальной проекцией основания призмы.
Определяем характерные точки: самую близкую точку 1 фронтальной плоскостью и самые далекие – и 3 фронтальной плоскостью S ().
Определяем промежуточные точки 4 и 5 при помощи вспомогательных фронтальных плоскостей .
Соединяем полученные точки плавной кривой линией с учетом видимости.
Пересечение поверхностей вращения
Линия пересечения двух поверхностей вращения в общем случае представляет пространственную кривую, которая может распадаться на две и более части. Эти части могут быть, в частности, и плоскими кривыми и даже прямыми линиями.
Линию пересечения поверхностей обычно строят по ее отдельным точкам. Точки подразделяются на характерные (опорные) и промежуточные (случайные).
Общим способом построения этих точек является способ вспомогательных секущих поверхностей – посредников. При пересечении данных поверхностей вспомогательной поверхностью определяются линии пересечения ее с данными поверхностями, в пересечении этих линий получаются точки, принадлежащие искомой линии пересечения.
Наиболее часто в качестве поверхностей-посредников применяются плоскости или сферы.
Для определения линии пересечения часто пользуются вспомогательными секущими поверхностями. Поверхности-посредники пересекают данные поверхности по линиям, которые, в свою очередь, пересекаются в точках линии пересечения данных поверхностей.
Секущие поверхности-посредники выбираются так, чтобы они, пересекаясь с данными поверхностями, давали простые для построения линии, например прямые и окружности.
Из общей схемы построения линии пересечения поверхностей выделяют два основных метода — метод секущих плоскостей и метод секущих сфер.
Способ вспомогательных секущих плоскостей
В качестве вспомогательных секущих плоскостей чаще всего используют плоскости, параллельные одной из плоскостей проекций.
Положение их выбирают таким, чтобы они пересекали заданные поверхности по простейшим линиям – прямым или окружностям.
Этот способ рекомендуется применять, если сечениями заданных поверхностей одной и той же плоскостью являются прямыми линиями или окружностями. Такая возможность существует в трех случаях:
- Если образующие (окружности) расположены в общих плоскостях уровня;
- Если в общих плоскостях уровня оказываются прямолинейные образующие линейчатой поверхности и окружности циклической;
- Линейчатые каркасы заданных поверхностей принадлежат общим плоскостям уровня или пучкам плоскостей общего положения.
Пересечение цилиндрической и торовой поверхности
Если одна из поверхностей является цилиндрической проецирующей поверхностью, то построение линии пересечения упрощается, так как в этом случае одна проекция линии пересечения совпадает с окружностью – проекцией цилиндра на перпендикулярную плоскость проекций.
На рис. 9.4 построена линия перехода между цилиндром и тором. Так как поверхность цилиндра перпендикулярна плоскости Н, то горизонтальная проекция линии перехода известна. Она совпадает с горизонтальной проекцией цилиндра. Фронтальную и профильную проекции строим по принадлежности точек линии перехода не проецирующей поверхности тора.
Рисунок 9.4 — Построение линии пересечения цилиндра с тором
Линия пересечения заданных поверхностей представляет собой пространственную кривую линию, имеющую фронтальную плоскость симметрии, образованную пересекающимися поверхностями цилиндра и тора.
Рассмотрим линию пересечения поверхности сферы с поверхностью конуса вращения (Рисунок 9.5).
Точки 1 и 7, расположенные на очерках фронтальных проекций конуса и сферы, очевидны и определяются без дополнительных построений.
Точка 4 на экваторе сферы построена с помощью горизонтальной плоскости, пересекающей конус по окружности. В пересечении горизонтальных проекций этой окружности и экватора находится горизонтальная проекция 4′ точки 4 и фронтальная 4» проекции точки 4 определим с помощью линии связи. Точка 4 на горизонтальной проекции разделяет кривую на видимую и невидимую части.
Точки 2, 3, 5 и 6, расположенные в промежутке между характерными точками 1,4 и 7 строим аналогично. С помощью линий связи определим фронтальные и горизонтальные проекции этих точек.
Рисунок 9.5 — Построение линии пересечения конуса и сферы
Особые случаи пересечения
Пересечение соосных поверхностей вращения
Соосными называют поверхности вращения, оси которых совпадают. Линия пересечения таких поверхностей строится на основании теоремы о пересечении соосных поверхностей вращения: соосные поверхности вращения пересекаются между собой по окружностям.
Если ось вращения соосных поверхностей перпендикулярна к какой либо плоскости проекций, то линия их пересечения проецируется на эту плоскость в виде окружности, а на другую плоскость проекций – в прямую линию.
На рис. 9.6 даны примеры пересечения соосных поверхностей вращения (ось вращения параллельна горизонтальной плоскости). На рис. 9.6, а приведены сфера и конус, б – сфера и цилиндр, в – сфера и тор.
Рисунок 9.6 — Пересечение соосных поверхностей вращения
Теорема Монжа для пересекающихся поверхностей вращения
Если две поверхности второго порядка описаны около третьей или вписаны в нее, то линия их пересечения распадается на две плоские кривые второго порядка. Плоскости этих кривых проходят через прямую, соединяющую точки пересечения линий касания.
Для этого случая пересечения поверхностей вращения необходимо выполнение трех условий:
- пересекающиеся поверхности должны быть поверхностями вращения;
- оси поверхностей должны пересекаться;
- плоскость, образованная осями поверхностей, должна быть параллельна одной из плоскостей проекций.
Рисунок 9.7 — Пересечение поверхностей вращения по теореме Монжа
Это положение подтверждается теоремой Монжа: Если две поверхности второго порядка могут быть вписаны или описаны около третьей поверхности второго порядка, то пространственная кривая их пересечения четвертого порядка распадается на две плоские кривые второго порядка.
Способ вспомогательных секущих сфер
При построении линии пересечения поверхностей вращения не всегда удается подобрать секущие плоскости так, чтобы они пересекали поверхности по линиям, проекции которых были бы прямыми или окружностями. В некоторых таких случаях в качестве секущих поверхностей (посредников) целесообразно применять сферы. Этот способ основан на свойстве сферы пересекаться с любой поверхностью вращения, ось которой проходит через центр сферы по окружности.
Чтобы сфера одновременно пересекала две поверхности по окружностям, проецирующимся в прямые линии, необходимо выполнить условия:
- Оси поверхностей вращения должны пересекаться (точку пересечения принимают за центр вспомогательных концентрических сфер).
- Оси поверхностей вращения должны располагаться параллельно какой-либо плоскости проекций.
Пример. Построить проекции линии пересечения поверхностей конуса и цилиндра (рис. 9.8) [1].
Заданы прямой усеченный конус и наклонный цилиндр – тела вращения. Их оси параллельны фронтальной плоскости проекций и пересекаются в точке О(о′,о), т.е. соблюдены условия метода сфер.
Как и в предыдущих задачах, найдем проекции характерных точек. Точка 1 – самая высокая, точка 2 – самая низкая. Чтобы убедится в этом проведем через оси тел вспомогательную фронтальную плоскость . Эта плоскость рассекает рассматриваемые тела по крайним очерковым образующим, которые на фронтальную плоскость проекции проецируются без искажения и, пересекаясь между собой, образуют искомые точки 1′, 2′. С помощью вспомогательных сфер найдем другие точки линии пересечения заданных поверхностей. Для определения радиуса наименьшей сферы из центра О(о′) проведем две нормали, перпендикулярные очерковым образующим этих тел и большей нормалью выполним эту сферу. Эта сфера будет наименьшей , проведенной в большем теле, поэтому поверхности конуса она касается по окружности, которая проецируется на фронтальную плоскость проекций в виде отрезка m′′n′′, а поверхность наклонного цилиндра пересекает по окружности, фронтальная проекция которой также проецируется в прямую линию k′′l′′. В пересечении k′′l′′ и m′′n′′ получим точку 3′′ – самую глубокую точку пересечения. Для нахождения промежуточных точек проведем ряд концентрических сфер, радиусы которых должны находится в пределе , и аналогично точке 3′′ находим необходимые промежуточные точки.
Рисунок 9.8 — Построение линии пересечения конуса и цилиндра
Учитывая, что сфера минимального радиуса всегда касается той поверхности, которая пронизывается другой, соединим найденные фронтальные проекции плавной кривой. Получим фронтальную проекцию линии пересечения. В нашем случае сфера радиусом касается поверхности конуса, значит, поверхность цилиндра пронизывает поверхность конуса.
Построим горизонтальную проекцию линии пересечения. Т.к. точки 1′′, 2′′ лежат на очерковой образующей конуса, то горизонтальные проекции этих точек находятся на оси конуса, т.е. на горизонтальной проекции этой образующей. Для нахождения горизонтальных проекций точек 3′, 4′, 5′ воспользуемся горизонтальными плоскостями , проведенными через эти точки соответственно. Каждая плоскость рассекает поверхность конуса по окружности, которая на горизонтальной плоскости проекций не искажается. По линиям связи найдем горизонтальные проекции точек 3′, 4′, 5′.
Для правильного соединения точек определим их видимость. Границей видимости на плоскости Н является точка 4′′, лежащая на осевой фронтальной проекции цилиндра. Горизонтальные проекции ее находятся на очерковых образующих цилиндра. Соединив плавной кривой найденные точки, получим горизонтальную проекцию линии пересечения рассматриваемых тел.
Способ вспомогательных секущих плоскостей
Суть способа — вспомогательная секущая плоскость одновременно пересекает поверхности каждого тела и образует фигуры сечения, контуры которых пересекаются. Точки пересечения контуров соединяют.
Этот способ применим тогда, когда контуры отдельных сечений представляют прямые линии или окружности.
Точки являются очевидными — это точки пересечения очерковых и оснований конусов. Найдём соответствующие вторые проекции этих точек.
Проведём горизонтальную плоскость которая рассечет оба конуса. В сечении конусов будут окружности причем их фронтальными проекциями являются прямые. Построим горизонтальные проекции этих сечений — окружности радиусом
На пересечении этих окружностей сечений на определим горизонтальную проекцию общей точки — Фронтальную проекцию точек 2 и 2 определим по линиям связи на секущей плоскости
Проведём еще ряд горизонтальных секущих плоскостей и определим проекции других промежуточных точек линии пересечения, которые соединим лекальной кривой с учётом видимости.
При взаимном пересечении конуса и цилиндра (рисунок 1) ось вращения цилиндра перпендикулярна . Значит, на линия пересечения совпадет с контуром основания цилиндра, т.е. фронтальной проекцией линии пересечения будет являться фронтальная проекция цилиндра.
Построив горизонтальную проекцию линии пересечения, на на пересечении горизонтальной оси симметрии цилиндра с проекцией цилиндра наметим точки — точки границы видимости линии пересечения, лежащие на экваторе цилиндра.
На точки линии пересечения, лежащие выше экватора будут видимы, а точки, лежащие ниже экватора — невидимы.
Способ вспомогательных сфер
Этот метод можно применять при соблюдении следующих условий :
- пересекающиеся поверхности должны быть поверхностями вращения;
- их оси должны пересекаться ; точка пересечения осей является центром вспомогательных сфер;
- их оси должны быть // какой-либо плоскости проекций.
Сфера проходит через самую дальнюю очевидную точку.
Сфера , должна касаться образующей большего тела, а меньшее тело -пересекать.
Сфера определяется как большее расстояние от центра сфер до образующих обоих тел — перпендикуляры из центра сфер к очерковым образующим. Больший перпендикуляр и будет являться радиусом минимальной сферы.
Сфера пересекает тела по окружностям, проецирующимся на одну из плоскостей проекций отрезком.
1. Определяем очевидные точки
2. Восстанавливаем перпендикуляры из центра сфер к очерковым образующим цилиндра и конуса. Перпендикуляр к цилиндру больше, чем перпендикуляр к образующей конуса. Значит, и будет являться радиусом минимальной сферы. На проводим из центра этим радиусом R окружность, которая рассечет и конус и цилиндр по окружностям, фронтальной проекцией которых будут прямые — сечение конусаи сечение цилиндра
На пересечении этих сечений определяем фронтальную проекцию точки 3 — .
3. На строим горизонтальную проекцию сечения конуса, на котором находится точка 3 -окружность радиусом / 2, на которой по линии связи определяем точки
1. Проводим ещё ряд секущих сфер радиусом больше минимальной и меньше максимальной и определяем другие промежуточные точки линии пересечения, которые соединяем лекальной кривой с учётом видимости.
Большее тело поглощает меньшее.
2. Видимость линии пересечения определяем следующим образом:
- — на пересечении фронтальной проекции линии пересечения с осью симметрии цилиндра намечаем точку определяем на на очерковых образующих цилиндра);
- — часть линии, находящаяся выше точки К — видимая. Точка К — граница видимости.
Элементы технического рисования
Технический рисунок — это наглядное изображение, выполненное по правилам аксонометрических проекций от руки, на глаз, соблюдая пропорции. Им пользуются на производстве для иллюстрации чертежей.
Обычно технический рисунок выполняется в изометрии.
Выполнение рисунка модели или детали начинается с проведения аксонометрических осей. Затем рисуется основание и строятся габаритные очертания -прямоугольные параллелепипеды. Деталь мысленно расчленяют на отдельные геометрические элементы, постепенно вырисовывая все элементы.
Технические рисунки получаются более наглядными, если их покрыть штрихами. При нанесении штрихов считают, что лучи света падают на предмет справа и сверху или слева и сверху.
Взаимное пересечение поверхностей с примерами
Алгоритм решения задач по определению линии пересечения поверхностей Ф’ и Ф» (рис. 9.1) в целом аналогичен решению второй позиционной задачи и состоит в следующем:
- Обе заданные поверхности Ф’ и Ф» рассекают третьей, вспомогательной плоскостью или поверхностью P.
- Определяют линии пересечения каждой заданной поверхности со вспомогательной: Ф’ × P =l’, Ф» × P =l».
- Определяют точки пересечения полученных линий l’×l» = A и A’. Точки A и a´ принадлежат обеим поверхностям.
- Проведя несколько вспомогательных поверхностей, находят достаточное количество точек и соединяют их плавной лекальной кривой, которая и является искомой линией пересечения поверхностей.
- Определяют видимость поверхностей и линии их пересечения.
Рис. 9.1. Пересечение поверхностей
В качестве вспомогательных поверхностей P следует выбирать поверхности — плоскости или сферы, которые пересекают обе заданные поверхности по наиболее простым для построения линиям — прямым или окружностям. Кроме того, если в сечении поверхности получаются окружности, они должны проецироваться на одну из плоскостей проекций без искажения.
Определение точек линии пересечения поверхностей начинают с построения так называемых опорных точек. К ним относятся:
- точки пересечения очерковых образующих, если образующие лежат в одной плоскости,
- точки, лежащие на очерковых образующих поверхностей,
- точки, лежащие в общей плоскости симметрии,
- экстремальные (верхние — нижние, правые — левые) по отношению к плоскостям проекций, к центру концентрических сфер.
При соединении точек следует иметь ввиду, что проекции линии пересечения не могут выходить за пределы общей площади — площади наложения — проекций пересекающихся поверхностей. Видимыми будут те участки линии пересечения, которые принадлежат видимым частям обеих поверхностей.
Способ вспомогательных параллельных плоскостей
Этот способ заключается в том, что обе поверхности рассекаются параллельными плоскостями уровня. Этот способ применяют лишь в тех случаях, когда вспомогательные плоскости рассекают поверхности по простым линиям — прямым или окружностям, которые проецируются на соответствующую плоскость проекций без искажения.
Рассмотрим построение линии пересечения прямого кругового конуса и сферы (рис. 9.2).
Рис. 9.2. Линия пересечения поверхностей прямого кругового конуса и сферы
Фронтальные плоскости уровня пересекают поверхность конуса по гиперболам, следовательно, для решения данной задачи нужно применить горизонтальные плоскости уровня, которые рассекают обе данные поверхности по окружностям.
Решение задачи начинают с построения опорных точек. Конус и сфера имеют общую плоскость симметрии γ(γ1), параллельную плоскости П2. Поэтому высшая точка A и низшая точка F линии пересечения получаются как результат пересечения очерковых образующих конуса и сферы (рис. 9.3).
Остальные точки определяются с помощью горизонтальных плоскостей уровня. Более подробно разберем построение точек E и E'(рис. 9.4).
1. Пересечь обе поверхности вспомогательной горизонтальной плоскостью уровня α(а2). Плоскость а(а2) пересекает сферу по окружности m(m1,m2), а конус — по окружности q(q1,q2):
m(m1 ,m 2)=Ф сф а (а2);
q(q1 ,q2) =Ф к а (u2).
2. Построив горизонтальные проекции окружностей m и q, определить точки их пересечения E и E’:
E1= m1 × q1; E2=E1E2α2.
E’1=m1 × q1; E’2=ElE2α2.
Рис. 9.3. Определение опорных точек линии пересечения поверхностей
3. Аналогичным образом определяются остальные точки, формирующие линию пересечения (рис. 9.5,а). Они получены с помощью горизонтальных плоскостей уровня β(β2), δ(δ2) и μ(μ2). Пределы этих плоскостей по высоте определяют высшая и низшая опорные точки линии пересечения поверхностей. Плоскость μ(μ2)рассекает поверхность сферы по очерковой образующей b (b2, b2),поэтому полученные точки В и В’ являются опорными, ограничивающими линию пересечения поверхностей по ширине.
4. Последовательно соединить одноименные проекции полученных точек плавной лекальной кривой. Полученная линия не должна выходить за пределы области перекрытия проекций данных поверхностей.
5. Определить видимость линии пересечения поверхностей и их очерковых образующих.
Поверхность конуса на горизонтальной плоскости проекций полностью видима, следовательно, видимость линии пересечения определяется по поверхности сферы. Видима будет та часть сферы, которая на П2 лежит выше очерковой образующей b2.Точки В и В’ на очерковой образующей сферы являются точками смены видимости линии пересечения на плоскости проекций П1.
Искомая линия пересечения поверхностей конуса и сферы d(d1,d2) (кривая второго порядка), полученная способом вспомогательных секущих плоскостей, приведена на рис 9.5,б.
Рис. 9.4. Определение промежуточных точек линии пересечения поверхностей:
а — наглядное изображение;
б — комплексный чертеж
Рис. 9.5. Определение линии пересечения поверхностей способом вспомогательных параллельных плоскостей:
а — определение промежуточных точек;
б — искомая линия пересечения
Способ вспомогательных сфер
При построении линии пересечения двух поверхностей способом вспомогательных сфер возможны два случая. В одном из них используются сферы, проведенные из одного, общего центра (концентрические), а в другом -сферы, проведенные из разных центров (эксцентрические).
Способ концентрических сфер
Этот способ применяется для построения линии пересечения поверхностей вращения произвольного вида, при условии, что оси этих поверхностей пересекаются.
В основу способа концентрических сфер положено свойство сферы с центром на оси какой-либо поверхности.
Если центр сферы находится на оси любой поверхности вращения, то сфера соосна с поверхностью вращения и в их пересечении получатся окружности (рис. 9.6).
Рис. 9.6. Соосные поверхности вращения:
a- наглядное изображение;
б — на комплексном чертеже
Рассмотрим способ концентрических сфер на примере построения линии пересечения цилиндра и конуса вращения, оси которых i(i1,i2) и q(q1,q2) пересекаются и точка пересечения осей обозначена через O (O1 ,O2)(рис. 9.7).
Рис. 9.7. Линия пересечения поверхностей цилиндра и прямого кругового конуса
Точка пересечения осей поверхностей принимается за центр вспомогательных концентрических сфер.
Алгоритм решения задачи об определении линии пересечения поверхностей состоит в следующем:
1. Определить опорные точки (рис. 9.8). Так как обе данные поверхности имеют общую плоскость симметрии δ(δ1), параллельную плоскости проекций П2, то их очерковые образующие, по отношению к плоскости П2,пересекаются. Точки A(A1,A2), B(B1,B2), C(C1,C2) и D(D1,D2) пересечения этих образующих являются точками видимости линии пересечения поверхностей.
2. Определить радиусы максимальной и минимальной сфер, необходимых для определения точек линии пересечения.
Радиус максимальной сферы Rmax равен расстоянию от центра вспомогательных сфер до наиболее удаленной точки пересечения очерковых образующих, в данном случае Rmax=O2A2 (рис. 9.9).
Чтобы определить радиус минимальной сферы Rmin, необходимо провести через точку O2 нормали к очерковым образующим данных поверхностей. Тогда больший из отрезков этих нормалей и будет Rmin. В этом случае сфера минимального радиуса будет касаться одной из данных поверхностей, а со второй — пересекаться.
В данном случае сферой минимального радиуса является сфера, касающаяся цилиндрической поверхности (см. рис. 9.9).
Сфера радиусом Rmin касается цилиндрической поверхности по окружности m, которая на фронтальной проекции изображается в виде прямой m2, перпендикулярной q2(m2q2). Эта же сфера пересекает коническую поверхность по двум окружностям. Но, в данном случае, нам интересна только окружность n, так как только она дает решение. Эта окружность n изображается на фронтальной проекции в виде прямой n2, перпендикулярной i2(n2i2). Точки E и Fпересечения этих окружностей будут принадлежать обеим поверхностям:
Чтобы построить горизонтальные проекции точек Е и F следует воспользоваться окружностью n, содержащей данные точки, так как она не искажается на плоскости проекций П1:
Рис. 108. Определение опорных точек линии пересечения поверхностей
Рис. 9.9. Определение радиусов максимальной и минимальной сфер.
Для построения промежуточных точек линии пересечения проводят несколько концентрических сфер с центром в точке O, причем радиус R этих сфер должен изменяться в пределах Rmin
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://ngeometry.ru/peresechenie-konusov.html
http://www.evkova.org/vzaimnoe-peresechenie-poverhnostej

Лекция 14 «Пересечение поверхностей, метод вспомогательных концентрических сфер» 1
 Обе пересекающиеся поверхности должны")
Для применения метода концентрических сфер необходимо выполнение трех условий: 1) Обе пересекающиеся поверхности должны быть поверхностями вращения; 2) Оси поверхностей должны пересекаться; 3) Поверхности должны иметь общую плоскость симметрии, т. е. оси поверхностей должны лежать в одной плоскости. 2

Алгоритм решения 2 ГПЗ. 1. Находим центр секущих сфер – точку пересечения осей вращения заданных поверхностей. 2. Находим минимальный радиус сферы (Rmin). Сфера минимального радиуса должна одну поверхность пресекать, а другой касаться, т. е. быть вписанной. 3. Находим радиус максимальной секущей сферы, она должна проходить через самую дальнюю точку пересечения очерков поверхностей. 4. Строим линии пересечения сферы Rmin с заданными поверхностями. 5. Определяем точки пресечения построенных линий. 6. Произвольно выбираем последовательно ряд промежуточных секущих сфер и повторяем построения по пунктам 4 и 5. 7. Соединяем точки плавной кривой линией с учетом видимости. 3

4

5

6

7

8

9

10

11

12

13

14

15

16

17

18

19
» 20")
Лекция 15 «Пересечение прямой с поверхностью (1 ГПЗ)» 20

Алгоритм решения такой же как при пересечении прямой с плоскостью. 21

22

23

24

25

26

27

28

29

Условие задачи: Определить точки пересечения прямой, заданной отрезком АВ, с поверхностью. Решить вопрос видимости прямой. 30

S 2 Заданы поверхность прямого кругового конуса и отрезок прямой общего положения АВ A 2 B 2 S 1 B 1 A 1 31

S 2 A 2 B 2 S 1 Для того, чтобы секущая плоскость пересекла обе фигуры по простым для построения линиям, ее надо задать «через» прямую, так как пересечением прямой и плоскости, если прямая принадлежит этой плоскости, является сама прямая. B 1 A 1 32

S 2 α 2 A 2 B 2 S 1 A 1 B 1 Однако, если зададим фронтально проецирующую плоскость α (α 2 ), то линией пересечения этой плоскости с поверхностью конуса будет эллипс, что не является простой для построения линией. 33

S 2 A 2 B 2 S 1 A 1 B 1 Если зададим горизонтально проецирующую плоскость α (α 1), то линией пересечения этой плоскости с поверхностью конуса будет гипербола, что так же не является простой для построения линией. α 1 34

S 2 A 2 B 2 S 1 A 1 Если в качестве посредника воспользоваться плоскостью общего положения и задать ее через вершину конуса, то линией B 1 пересечения этой плоскости с поверхностью будут две пересекающиеся прямые. 35

S Рассмотрим решение задачи на примере пространственной модели. Следует иметь ввиду, что линия среза (основание конуса) должна принадлежать плоскости проекций, или надо дополнительно вводить плоскость уровня П 0 , чтобы основание принадлежало этой плоскости. . A B П 0 36

S Зададим плоскость общего положения двумя пересекающимися прямыми, одна из которых — заданная АВ, а другую зададим через вершину S и точку на прямой АВ, например, через точку А ( можно задать любую другую точку на этой прямой). A B П 0 37
, для")
S Построим следы плоскости общего положения SАВ на плоскости проекций (П 0 ), для чего найдем следы прямой S А (точка М). A B П 0 M 38
, для")
S Построим следы плоскости общего положения SАВ на плоскости проекций (П 0 ), для чего найдем следы прямой S А (точка М). И следы прямой АВ (точка Т). A П 0 B Т M 39
 является прямая")
S Следом плоскости общего положения SАВ на плоскости проекций (П 0 ) является прямая (отрезок) МТ. В этой же плоскости П 0 лежит основание конуса. A П 0 B Т M 40
 является прямая (отрезок)")
Следом плоскости общего положения SАВ на плоскости проекций (П 0 ) является прямая (отрезок) МТ. В этой же плоскости П 0 лежит основание конуса. S Отмечаем точки 1 и 2 взаимного пересечения основания конуса и следа плоскости МТ. A П 0 B Т M 2 1 41

Пересечением плоскости общего положения SАВ с поверхностью конуса являются две прямые S 1 и S 2. S A П 0 B Т M 2 1 42

Отрезки АВ, S 1 и S 2 принадлежат плоскости SМТ. Следовательно, точки D и Е (пересечение АВ с отрезками S 1 и S 2) являются точками пересечения АВ с поверхностью конуса. S A C D П 0 B Т M 2 1 43

Отрезки АВ, S 1 и S 2 принадлежат плоскости SМТ. Следовательно, точки D и Е (пересечение АВ с отрезками S 1 и S 2) являются точками пересечения АВ с поверхностью конуса. S A C D B Т M 2 1 44

S A C D B 45

S A C D B 46

47

48

49

50

51

52

53

54

55

56