Вращение вокруг заданной оси.
1. Пусть точка А вращается вокруг оси, перпендикулярной к пл. π1 (рис. 212). Через точку А проведена пл. α, перпендикулярная к оси вращения и, следовательно, параллельная пл. π1. При вращении точка А описывает в пл. α окружность радиуса R; величина радиуса выражается длиной перпендикуляра, проведенного из точки А на ось. Окружность, описанная в пространстве точкой А, проецируется на пл. π1 без искажения. Так как пл. α перпендикулярна к пл. π2, то проекции точек окружности на пл. π2 расположатся на α», т. е. на прямой, перпендикулярной к фронтальной проекции оси вращения. Чертеж дан на рис. 212 справа: окружность, описанная точкой А при вращении ее вокруг оси, спроецирована без искажения на пл. π1. Из точки О’, как из центра, проведена окружность радиуса R=О’А’; на пл. π2 эта окружность изображена отрезком прямой, равным 2R.
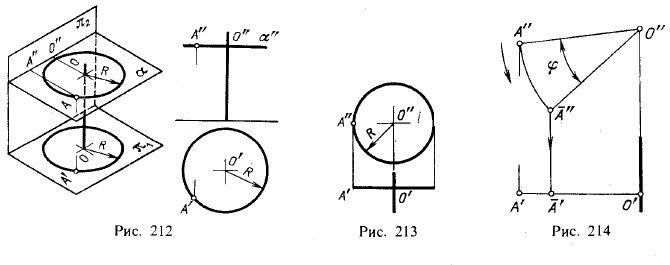
На рис. 213 изображено вращение точки А вокруг оси, перпендикулярной к пл. π2. Окружность, описанная точкой А, спроецирована без искажения на пл. π2. Из точки О», как из центра, проведена окружность радиуса R=О’А’; на пл. π1 эта окружность изображена отрезком прямой, равным 2R.
Из рассмотрения рис. 212 и рис. 213 отчетливо видно, что при вращении точки вокруг оси, перпендикулярной к какой-нибудь из плоскостей проекций, одна из проекций вращаемой точки перемещается по прямой, перпендикулярной к проекции оси вращения.
На рис. 214 показан поворот точки А против движения часовой стрелки на угол φ вокруг оси, проходящей через точку О перпендикулярно к пл. π2. Из точки О», как из центра, проведена дуга радиуса О»А», соответствующая углу φ и направлению вращения. Новое положение фронтальной проекции точки А — точка А«
2.Теперь рассмотрим поворот отрезка прямой линии вокруг заданной оси. Отрезок АВ (рис. 215) повернут в положение АВ. Очевидно, дело свелось к повороту точек A и В на заданный угол φ по заданному направлению. Пути перемещения фронтальных проекций этих точек указаны прямыми, проведенными через А» и В» перпендикулярно к фронтальной проекции оси вращения.
Новое положение горизонтальной проекции точки А (точка А‘) получено при повороте радиуса О’А’ на заданный угол φ. Для нахождения точки B‘ (положение горизонтальной проекции точки В после поворота) проведена дуга радиусом О’В’
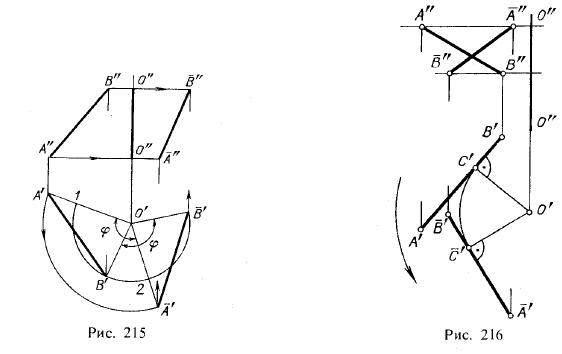
и в этой дуге отложена хорда В’B‘, равная хорде 1—2; это соответствует повороту точки В на тот же угол φ.
Далее, из точек A‘ и B‘ проведены линии связи до пересечения с направлениями перемещения фронтальных проекций; получены проекции A» и B«.
Отрезки прямых между точками A» и B» и между точками A‘ и B‘ определяют новые положения фронтальной и горизонтальной проекций отрезка АВ после его поворота в положение AB.
Так как в треугольниках А’В’О’ и A‘B‘О’ (рис. 215) стороны В’О’ и А’О’ треугольника А’В’О’ равны (как радиусы) соответственно сторонам B‘О’ и A‘О’ треугольника A‘B‘О’ и углы, заключенные между указаннымирторонами, также равны, то эти треугольники равны между собой. Значит, А’В’ = A‘B‘, т. е. величина горизонтальной проекции отрезка, повернутого вокруг оси, перпендикулярной к пл. π1, не изменяется. Очевидно, такое же заключение справедливо в отношении фронтальной проекции отрезка при его повороте вокруг оси, перпендикулярной к пл. π2.
В равных между собой треугольниках А’В’О’ и A‘B‘О’ (рис. 215) будут равны и их высоты, проведенные, например, из точки О’ на А’В’ и A‘B‘.
Сделанные выводы позволяют установить следующий способ построения новых проекций отрезка, вращаемого около оси на заданный угол (рис. 216). Через точку О’ проводим прямую, перпендикулярную к А’В’; точку С’ (пересечение перпендикуляра с А’В’) повертываем на заданный угол. Проведя через точку С’ (новое положение точки С’) прямую, перпендикулярную к радиусу O’C‘, получаем направление нового положения горизонтальной проекции отрезка. Так ткак отрезки С’А’ и С’В’ не изменяют своей величины, то, откладывая от точки C‘ отрезки C‘A‘=С’А’ и C‘B‘=С’В’ , находим новое положение A‘B‘ проекции всего отрезка. Нахождение нового положения фронтальной проекции A«B» остается прежним.
Указанным способом можно не только повернуть отрезок на заданный угол, но и определить угол, на который надо повернуть заданный отрезок, чтобы придать ему некоторое требуемое положение (например, расположить параллельно плоскости π2).
3.Поворот плоскости вокруг заданной оси сводится к повороту принадлежащих ей точек и прямых линий.
Пример дан на рис. 217: треугольник АВС, определяющий плоскость, повернут в положение ABC согласно заданным углу φ и направлению, указанному стрелкой. Построение подобно показанному на рис. 215: там были повернуты две точки А и В, здесь же три точки — вершины А, В и С, а следовательно, и вся фигура. Треугольники А’В’С и A‘B‘C‘ равны между собой по построению: при оси, перпендикулярной к пл. π1 горизонтальная проекция величины своей не изменяет. Это
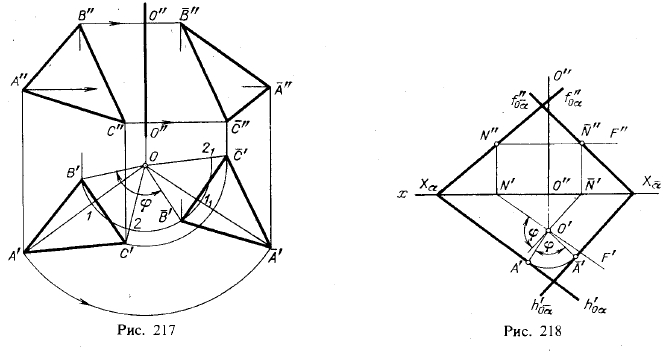
соответствует тому, что угол наклона пл. АВС по отношению к пл.π1 не изменяетя, если ось вращения перпендикулярна к пл.π1 Очевидно, при повороте вокруг оси, перпендикулярной к пл. π2, не изменяется угол наклона вращаемой плоскости к пл. π2 и сохраняется величина фронтальных проекций.
При вращении плоскости, выраженной ее следами, обычно поворачивают один из следов и горизонталь (или фронталь) плоскости. Пример дан на рис. 218; плоскость общего положения α повернута на угол φ вокруг оси, перпендикулярной к пл. π1. На следе h’0α взята точка, ближайшая к оси вращения, — точка A’ (O’A’⊥h’0α), подобно тому, как была на рис. 216 взята точка С’. Затем точка А’ повернута на угол φ. Через полученную точку A‘ проведена прямая линия, перпендикулярная к О’A‘; это горизонтальный след плоскости в ее новом положении.
Для нахождения фронтального следа плоскости после ее поворота достаточно найти, помимо найденной точки Хα на оси x, еще одну точку, принадлежащую следу. В пл. α взята горизонталь N’F’, N»F», пересекающая ось вращения (N’F’ проходит через горизонтальную проекцию оси вращения). Конечно, можно взять горизонталь и не пересекающую ось вращения. Так как горизонталь и при новом положении плоскости останется параллельной ее горизонтальному следу, то надо провести через О’ прямую, параллельную h’0α получится новое положение горизонтальной проекции горизонтали. Фронтальная ее проекция не изменит своего направления, а поэтому легко найти новый фронтальный след горизонтали — точку N«. Теперь можно построить фронтальный след (f»0α)
Вращение вокруг выбранной оси. В ряде случаев ось вращения может быть выбрана. При этом, если ось вращения выбрать проходящей через один из концов отрезка, то построение упростится, так как точка, через которую проходит ось, будет «неподвижной» и для поворота отрезка надо построить новое положение проекций только одной точки — другого конца.
На рис. 219 показан случай, когда для поворота отрезка АВ выбрана ось вращения, перпендикулярная к пл. π1 и проходящая через точку А. При повороте вокруг такой оси можно, например, расположить отрезок параллельно пл. π2.
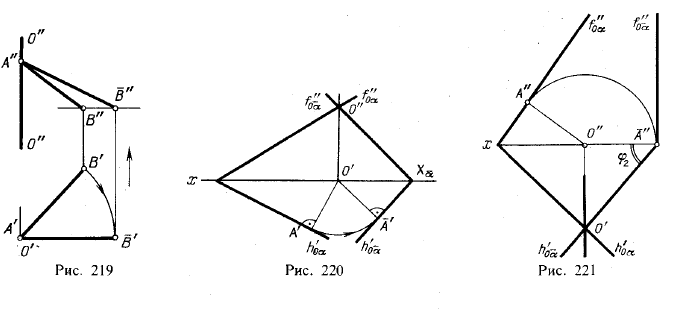
Именно такое положение показано на рис. 219. Горизонтальная проекция отрезка в своем новом положении перпендикулярна к линии связи А’А». Найдя точку В» и построив отрезок А»В«, получаем фронтальную проекцию отрезка АВ в его новом положении. Проекция А»В» выражает длину отрезка АВ. Угол А»В«В» равен углу между прямой АВ и пл. π1
Если поставить перед собой цель — определить угол наклона прямой общего положения к пл. π2, то надо провести ось вращения перпендикулярно к пл. π2 и повернуть прямую так, чтобы она стала параллельной пл. π1. Предоставляем читателю выполнить такое построение.
Если при повороте плоскости, выраженной следами, можно выбрать ось вращения, то ее целесообразно расположить в плоскости проекций; построения в этом случае упрощаются. Пример дан на рис. 220. Положим, что ось вращения должна быть перпендикулярна к пл. π1. Если ее взять в пл. π2, то на следе f»0α, оказывается «неподвижная» точка О (в пересечении с осью вращения). После поворота плоскости фронтальный след должен пройти через эту точку. Следовательно, найдя положение горизонтального следа (h’0α) после поворота, надо провести след f’0α через точку Хα и через точку О». По сравнению с рис. 218 упрощение состоит в том, что отпала горизонталь. Она понадобилась бы в случае «ухода» точки Xα за пределы чертежа; но в аналогичном случае на рис. 218 пришлось бы взять две вспомогательные линии.
На рис. 221 плоскость общего положения повернута в положение горизонтально-проецирующей; при этом определился угол наклона пл. α к пл. π2. Если взять ось вращения, перпендикулярную к пл. π1 то можно пл. α поставить в положение фронтально-проецирующей, определив при этом угол наклона плоскости к пл. π1.
Сравнивая между собой плоскости до и после поворота, замечаем, что угол, образуемый следами f»0α и h’0α на чертеже, вообще изменяется.
Если представить себе круговой конус с вершиной в точке О и с основанием на рис. 220 в пл. π1 а на рис. 221 в пл. π2, и касательную к конусу пл. α, то поворот пл. α вокруг оси вращения совпадающей с осью конуса, представляет собой как бы «обкатку» конуса касательной к нему плоскостью.
Вопросы к §§ 34-35
- В чем заключается способ вращения?
- Что такое плоскость вращения точки и как она располагается по отношению к оси вращения?
- Что такое центр вращения точки при повороте ее вокруг некоторой оси?
- Что такое радиус вращения точки?
- Как перемещаются проекции точки?
- Какая из проекций отрезка прямой линии не изменяет своей величины?
- Как осуществляется поворот плоскости: а) не выраженной следами, б) выраженной следами?
- В каком случае не изменяется при вращении наклон прямой линии по отношению: а) к пл. π1, б) к пл. π2?
- Такой же вопрос относительно плоскости π3.
- Можно ли путем поворота определить длину отрезка прямой линии и угол ее наклона к пл.π1 и к пл. π2?
- Можно ли путем поворота плоскости определить угол ее наклона к пл. π1 и к пл. π2?
- Какое выгодное положение можно придать оси вращения при повороте: 1) отрезка прямой, 2) плоскости, выраженной следами?
Последующие вопросы относятся к вращению вокруг оси, перпендикулярной к плоскости проекций.
Содержание:
Способы преобразования проекций:
Задачи, связанные с определением истинных размеров изображённых геометрических элементов, решаются способом преобразования проекций. Он основан на переходе от общих случаев к частным случаям положения этих элементов по отношению к плоскостям проекций. Такой переход можно осуществить:
- изменением положения рассматриваемого геометрического элемента по отношению к неизменной системе плоскостей проекций;
- переменной плоскостей проекций при неизменном положении рассматриваемого геометрического элемента в пространстве.
Способы преобразования проекций
Критерием рациональности решения графических задач является максимальная точность и наглядность, достигнутая при минимальном объеме построений.
Решение, как правило, получается наиболее простым и наглядным, если объекты проецирования занимают одно из частных положений относительно плоскостей проекций. В начертательной геометрии разработан ряд способов, позволяющих любую конкретную графическую задачу привести к частному виду и применить типовой алгоритм ее решения.
Это можно сделать двумя способами:
- изменить положение в пространстве рассматриваемого геометрического элемента путем его вращения вокруг одной или нескольких осей, оставив неизменным положение плоскостей проекций;
- ввести одну или несколько дополнительных плоскостей проекций, оставив неизменным положение геометрического элемента.
Рассмотрим оба способа на конкретных примерах.
Метод вращения
Сущность метода заключается в том, что заданный геометрический элемент вращением вокруг некоторой неподвижной примой (оси вращения) приводят в положение, удобное для решения поставленной задачи.
Ось вращения может быть выбрана произвольно, но чаще всего её располагают параллельно или перпендикулярно к плоскости проекций.
Рассмотрим случай вращения точки вокруг оси, перпендикулярной к плоскости 
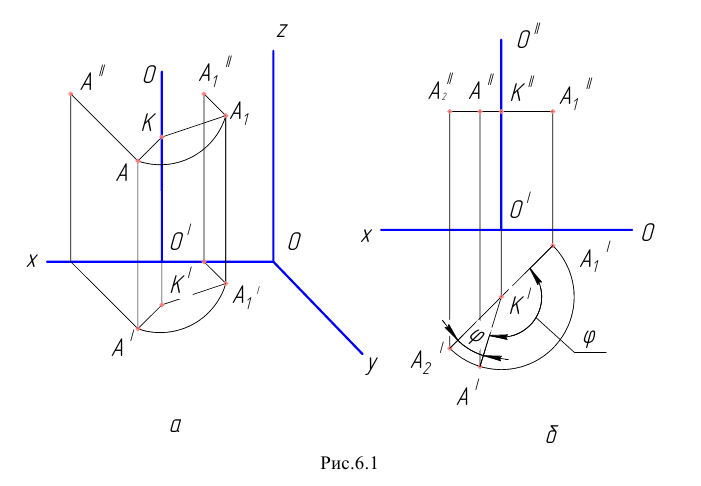
Пусть даны (см. Рнс.6.1, а) косоугольная проекция точки А, её вторичные проекции  и
и  , косоугольная проекция прямой
, косоугольная проекция прямой  , перпендикулярной к плоскости
, перпендикулярной к плоскости  и её проекция на плоскость (точка
и её проекция на плоскость (точка  ). Будем вращать вокруг прямой
). Будем вращать вокруг прямой  точку А. При этом она будет перемещаться по окружности в плоскости, перпендикулярной к этой прямой. Радиусом данной окружности является перпендикуляр, опущенный из точки на прямую. В нашем случае точка А будет вращаться по окружности в плоскости, параллельной плоскости
точку А. При этом она будет перемещаться по окружности в плоскости, перпендикулярной к этой прямой. Радиусом данной окружности является перпендикуляр, опущенный из точки на прямую. В нашем случае точка А будет вращаться по окружности в плоскости, параллельной плоскости  . Поэтому горизонтальную проекцию
. Поэтому горизонтальную проекцию  радиуса вращения получим, соединяя прямой точку
радиуса вращения получим, соединяя прямой точку  с точкой . Проведя
с точкой . Проведя  найдём косоугольную проекцию радиуса вращения. Пусть точка А вращением вокруг оси переместится в точку
найдём косоугольную проекцию радиуса вращения. Пусть точка А вращением вокруг оси переместится в точку  .Траектория движения в натуре — дуга окружности ( в косоугольных проекциях — часть эллипса). На плоскость
.Траектория движения в натуре — дуга окружности ( в косоугольных проекциях — часть эллипса). На плоскость  траектория движения точки спроецируется без искажения, а на плоскость
траектория движения точки спроецируется без искажения, а на плоскость  — в виде прямой, параллельной оси ох. Изображение горизонтальной проекции точки А переместится в точку
— в виде прямой, параллельной оси ох. Изображение горизонтальной проекции точки А переместится в точку  , а изображение её фронтальной проекции — в точку
, а изображение её фронтальной проекции — в точку 
Итак, при вращении точки вокруг оси, перпендикулярной к плоскости  её горизонтальная проекция перемещается по окружности, а фронтальная проекция — по прямой, параллельной оси ох.
её горизонтальная проекция перемещается по окружности, а фронтальная проекция — по прямой, параллельной оси ох.
В прямоугольных проекциях (см. Рис.6.1, б) при вращении точки  вокруг оси
вокруг оси  перпендикулярной к плоскости горизонтальная проекция точки будет перемещаться по дуге окружности радиуса
перпендикулярной к плоскости горизонтальная проекция точки будет перемещаться по дуге окружности радиуса  , а фронтальная её проекция — по прямой, параллельной оси ох.
, а фронтальная её проекция — по прямой, параллельной оси ох.
При повороте на угол  (или
(или  ) проекции
) проекции  и
и  точки переместятся, соответственно, в точки
точки переместятся, соответственно, в точки 
Аналогичными построениями можно показать, что при вращении точки вокруг оси, перпендикулярной к плоскости , фронтальная проекция точки будет перемещаться по дуге окружности, а её горизонтальная проекция — по прямой, параллельной оси ох.
Вращение отрезка прямой может быть выполнено в соответствии с правилами вращения точки. Пусть требуется повернуть на некоторый угол (прямую 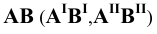 вокруг оси
вокруг оси  перпендикулярной к плоскости (см. Рис.6.2).
перпендикулярной к плоскости (см. Рис.6.2).
Переместим каждую из горизонтальных проекций точек А и В по дугам окружностей с центром в точке  на заданный угол . Соединяя полученные точки
на заданный угол . Соединяя полученные точки  и
и  прямой, получим горизонтальную проекцию отрезка АВ, повёрнутого вокруг оси о на угол . Фронтальные проекции
прямой, получим горизонтальную проекцию отрезка АВ, повёрнутого вокруг оси о на угол . Фронтальные проекции  и
и  переместятся по прямым, параллельным оси ох, и займут положения
переместятся по прямым, параллельным оси ох, и займут положения  и
и  .
.
Отметим, что при вращении отрезка прямой вокруг оси, перпендикулярной к плоскости , горизонтальная проекция его не изменяет длины, так как . Используем это обстоятельство на практике. Пусть даны
. Используем это обстоятельство на практике. Пусть даны  и ось вращения
и ось вращения  перпендикулярная к плоскости (Рис.6.3). Требуется повернуть прямую АВ вокруг оси
перпендикулярная к плоскости (Рис.6.3). Требуется повернуть прямую АВ вокруг оси  на некоторый угол
на некоторый угол  .
.
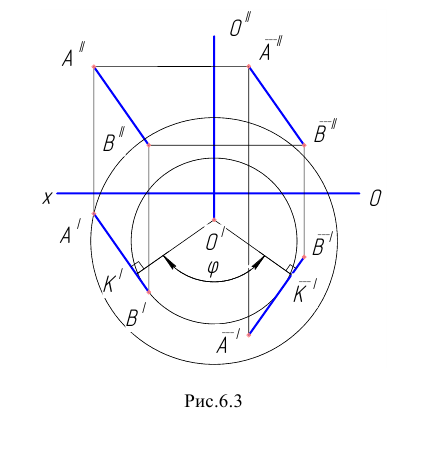
Опустим перпендикуляр из горизонтальной проекции оси вращения на горизонтальную проекцию отрезка. Полученную точку  повернём вокруг оси на угол Через точку
повернём вокруг оси на угол Через точку  проведём прямую, перпендикулярную к
проведём прямую, перпендикулярную к , на которой отложим отрезки
, на которой отложим отрезки  и
и  соответственно равные отрезкам
соответственно равные отрезкам  и
и  . Получим новую горизонтальную проекцию
. Получим новую горизонтальную проекцию  отрезка АВ. Фронтальная проекция
отрезка АВ. Фронтальная проекция  строится по аналогии с предыдущим примером.
строится по аналогии с предыдущим примером.
Наиболее просто вращение отрезка осуществляется вокруг оси, пересекающей этот отрезок, так как точка их пересечения остаётся неподвижной.
Определим методом вращения истинную длину отрезка 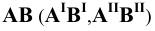 прямой общего положения (Рис.6.4). Для этого следует повернуть заданный отрезок так, чтобы он расположился параллельно какой — либо плоскости координат. Проведём ось вращения перпендикулярно к плоскости
прямой общего положения (Рис.6.4). Для этого следует повернуть заданный отрезок так, чтобы он расположился параллельно какой — либо плоскости координат. Проведём ось вращения перпендикулярно к плоскости  через точку В отрезка. Фронтальная проекция оси изобразится в виде прямой
через точку В отрезка. Фронтальная проекция оси изобразится в виде прямой  , перпендикулярной к оси ох, а горизонтальная проекция её — точка
, перпендикулярной к оси ох, а горизонтальная проекция её — точка  , совпадает сточкой
, совпадает сточкой 
При вращении отрезка АВ точка  остаётся неподвижной, а точку А переместим в положение А, когда горизонтальная проекция
остаётся неподвижной, а точку А переместим в положение А, когда горизонтальная проекция  будет параллельна оси ох. Новой фронтальной проекцией отрезка будет отрезок
будет параллельна оси ох. Новой фронтальной проекцией отрезка будет отрезок 
 В этом положении отрезок ВА параллелен плоскости
В этом положении отрезок ВА параллелен плоскости  и, следовательно, проецируется на неё в истинную длину, то есть
и, следовательно, проецируется на неё в истинную длину, то есть  — истинная длина отрезка.
— истинная длина отрезка.
Отметим, что при определении истинной длины отрезка методом вращения одновременно определяется угол наклона этого отрезка к одной из плоскостей координат. В нашем случае угол  — угол наклона отрезка АВ к плоскости
— угол наклона отрезка АВ к плоскости  . Для определения угла наклона отрезка прямой к плоскости
. Для определения угла наклона отрезка прямой к плоскости  следует его вращать вокруг оси, перпендикулярной к плоскости
следует его вращать вокруг оси, перпендикулярной к плоскости  так, чтобы он расположился параллельно плоскости .
так, чтобы он расположился параллельно плоскости .
Для того чтобы повернуть плоскость вокруг некоторой оси, достаточно повернуть вокруг неё геометрические элементы, определяющие её положение. Пусть требуется повернуть плоскость  общего положения вокруг оси
общего положения вокруг оси перпендикулярной к плоскости на некоторый угол
перпендикулярной к плоскости на некоторый угол  (Рис.6.5).
(Рис.6.5).
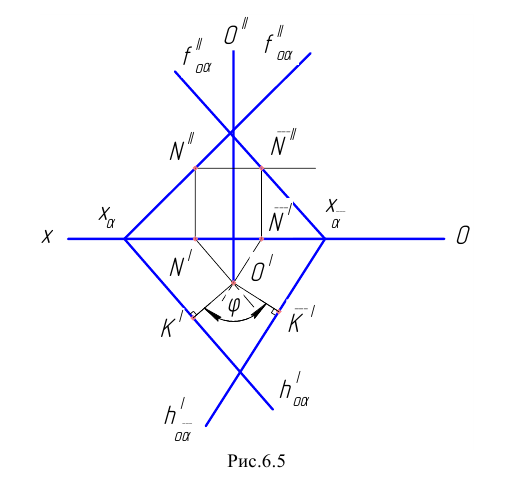
Для получения изображения горизонтального следа плоскости  повёрнутой вокруг оси , опустим перпендикуляр из горизонтальной проекции
повёрнутой вокруг оси , опустим перпендикуляр из горизонтальной проекции  оси вращения на след
оси вращения на след  Полученную точку
Полученную точку  повернём вокруг оси на угол
повернём вокруг оси на угол  и, через точку
и, через точку  проведём прямую, перпендикулярную к
проведём прямую, перпендикулярную к  Эта прямая и будет новым горизонтальным следом
Эта прямая и будет новым горизонтальным следом  . В точке пересечения
. В точке пересечения  с осью ох найдём новую точку схода следов
с осью ох найдём новую точку схода следов  . Для построения нового фронтального следа необходимо найти ещё одну точку, принадлежащую этому следу. Такой точкой будет фронтальная проекция фронтального следа любой прямой, лежащей в плоскости
. Для построения нового фронтального следа необходимо найти ещё одну точку, принадлежащую этому следу. Такой точкой будет фронтальная проекция фронтального следа любой прямой, лежащей в плоскости  в новом её положении. Обычно в качестве такой прямой берут горизонталь
в новом её положении. Обычно в качестве такой прямой берут горизонталь  , пересекающую ось вращения. Новой горизонтальной проекцией горизонтали будет прямая
, пересекающую ось вращения. Новой горизонтальной проекцией горизонтали будет прямая  проведённая через точку
проведённая через точку  параллельно следу
параллельно следу  . Новой фронтальной проекцией горизонтали будет прямая
. Новой фронтальной проекцией горизонтали будет прямая  , на которой нетрудно найти точку
, на которой нетрудно найти точку  — новый фронтальный след горизонтали. Новый фронтальный след
— новый фронтальный след горизонтали. Новый фронтальный след  плоскости получим, проведя прямую через точки
плоскости получим, проведя прямую через точки  и
и  .
.
Построение нового фронтального следа плоскости значительно упрощается, если ось вращения перпендикулярна к плоскости  и лежит в плоскости
и лежит в плоскости  .
.
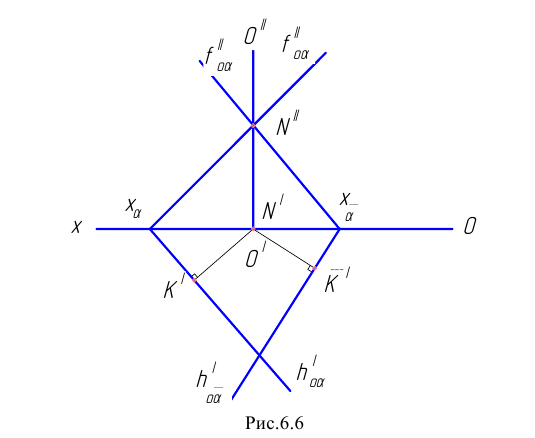
В этом случае новый горизонтальный след  плоскости
плоскости  повёрнутой вокруг оси, находится так же, как и в предыдущем примере
повёрнутой вокруг оси, находится так же, как и в предыдущем примере  и
и  Второй точкой ( кроме
Второй точкой ( кроме  ) для проведения нового фронтального следа плоскости
) для проведения нового фронтального следа плоскости  будет точка
будет точка  так как она не изменяет своего положения при повороте следа.
так как она не изменяет своего положения при повороте следа.
Вращение плоскости вокруг осей, перпендикулярных к плоскостям координат, осуществляют при решении задач приведения плоскости общего положения в частное положение, например, перпендикулярное одной из плоскостей проекций.
Рассмотрим случай вращения плоскости, заданной плоской фигурой, например треугольником ABC (Рис.6.7). Требуется методом вращения эту плоскость фронтально — проецирующей. Вращение такой плоскости может быть осуществлено, в частности, вращением трёх вершин треугольника. Однако с целью упрощения построений ось вращения проводят через одну из вершин плоской фигуры. Угол, на который следует повернуть треугольник, определяется из условия, что любая горизонталь фронтально — проецирующей плоскости перпендикулярна к плоскости  т.е. проецируется на плоскость
т.е. проецируется на плоскость  в точку. Проведём через вершину С треугольника горизонталь
в точку. Проведём через вершину С треугольника горизонталь  и повернём её вокруг оси
и повернём её вокруг оси  , проходящей через точку С, на такой угол, при котором её горизонтальная проекция
, проходящей через точку С, на такой угол, при котором её горизонтальная проекция  будет перпендикулярна к оси ох. Далее вращением вокруг оси
будет перпендикулярна к оси ох. Далее вращением вокруг оси  горизонтальные проекции
горизонтальные проекции  и
и  точек А и В на тот же угол. Это построение проще выполнить, проведя из точки С, как из центра, дуги окружностей радиусами
точек А и В на тот же угол. Это построение проще выполнить, проведя из точки С, как из центра, дуги окружностей радиусами  и
и  и сделав на этих дугах засечки из точки
и сделав на этих дугах засечки из точки  радиусами
радиусами 
Треугольник  будет искомой горизонтальной проекцией треугольника после его вращения. Построив новые фронтальные проекции точек А и В в соответствии с правилами, рассмотренными ранее, получим новую фронтальную проекцию треугольника ABC в виде прямой линии
будет искомой горизонтальной проекцией треугольника после его вращения. Построив новые фронтальные проекции точек А и В в соответствии с правилами, рассмотренными ранее, получим новую фронтальную проекцию треугольника ABC в виде прямой линии  .
.
Если необходимо сделать плоскость общего положения горизонтально-проецирующей, то следует её вращать вокруг оси, перпендикулярной к плоскости  до положения, при котором фронтальный след плоскости или фронтальная проекция любой её фронтали будут перпендикулярны к оси ох .
до положения, при котором фронтальный след плоскости или фронтальная проекция любой её фронтали будут перпендикулярны к оси ох .
Метод вращения позволяет сделать плоскость общего положения, параллельной плоскости координат. Это можно осуществить двумя способами:
- последовательным вращением плоскости вокруг осей, перпендикулярных к плоскостям проекций;
- вращением плоскости вокруг горизонтали или фронтали.
Не рассматривая подробно первый способ, отметим лишь возможность его применения в предыдущей задаче (см. Рис.6.7), где полученную фронтально — проецирующую плоскость (треугольника  ) можно повернуть ещё раз вокруг оси, перпендикулярной к плоскости проходящей, например, через точку А до положения, параллельного плоскости
) можно повернуть ещё раз вокруг оси, перпендикулярной к плоскости проходящей, например, через точку А до положения, параллельного плоскости  В этом положении треугольник спроецируется на плоскость
В этом положении треугольник спроецируется на плоскость  в истинную величину
в истинную величину 
Установим, как перемещаются проекции точек при вращении вокруг произвольной горизонтали. При вращении точки  вокруг горизонтали MN (см. Рис.6.8) точка В будет перемещатся по дуге окружности в плоскости, проходящей через точку В и перпендикулярной к MN, т.е. в горизонтально — проецирующей плоскости
вокруг горизонтали MN (см. Рис.6.8) точка В будет перемещатся по дуге окружности в плоскости, проходящей через точку В и перпендикулярной к MN, т.е. в горизонтально — проецирующей плоскости  Горизонтальнай след
Горизонтальнай след  этой плоскости проходит через точку
этой плоскости проходит через точку  и перпендикулярен к горизонтальной проекции
и перпендикулярен к горизонтальной проекции  горизонтали. Радиусом вращения точки В будет перпендикуляр ВО, опущенный из точки В на MN.
горизонтали. Радиусом вращения точки В будет перпендикуляр ВО, опущенный из точки В на MN.
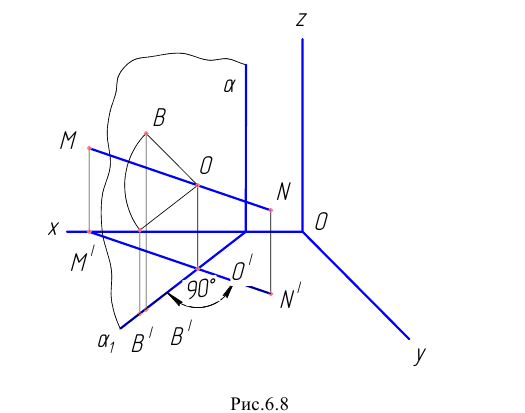
Если привести радиус вращения ВО в положение, параллельное плоскости  то он спроецируется на эту плоскость отрезком
то он спроецируется на эту плоскость отрезком  совпадающим со следом
совпадающим со следом  и по длине равным ВО.
и по длине равным ВО.
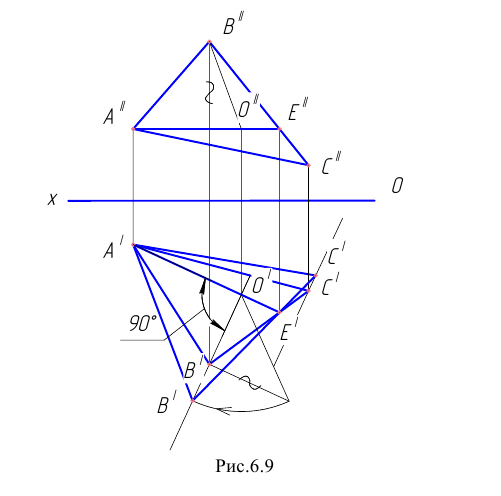
Рассмотрим задачу определения истинной величины плоской фигуры вращением вокруг горизонтали. Пусть задан треугольник ABC (см. Рис.6.9) двумя проекциями  или
или  Требуется определить его истинную величину. Осью вращения выбираем горизонталь
Требуется определить его истинную величину. Осью вращения выбираем горизонталь  Для определения истинной величины треугольника следует привести его вращением вокруг горизонтали АЕ в положение, параллельное плоскости
Для определения истинной величины треугольника следует привести его вращением вокруг горизонтали АЕ в положение, параллельное плоскости  . Новой фронтальной проекцией треугольника будет прямая, совпадающая с фронтальной проекцией горизонтали (на Рис.6.9 не показана). Построим новую горизонтальную проекцию треугольника ABC. Для этого сначала найдём новую горизонтальную проекцию
. Новой фронтальной проекцией треугольника будет прямая, совпадающая с фронтальной проекцией горизонтали (на Рис.6.9 не показана). Построим новую горизонтальную проекцию треугольника ABC. Для этого сначала найдём новую горизонтальную проекцию  вершины В. Радиус вращения точки В в начальном положении треугольника проецируется на плоскость
вершины В. Радиус вращения точки В в начальном положении треугольника проецируется на плоскость  отрезком
отрезком  , перпендикулярным к
, перпендикулярным к  а на плоскость
а на плоскость  — отрезком
— отрезком  Когда точка В расположится в плоскости, параллельной плоскости
Когда точка В расположится в плоскости, параллельной плоскости  и проходящей через горизонталь АЕ, радиус
и проходящей через горизонталь АЕ, радиус  спроецируется на плоскость
спроецируется на плоскость  отрезком
отрезком  , перпендикулярным к
, перпендикулярным к  и равным собственной длине. Последнюю обычно определяют способом треугольника, откладывая на перпендикуляре к
и равным собственной длине. Последнюю обычно определяют способом треугольника, откладывая на перпендикуляре к  разность недостающих координат ( прямые, отмеченные волнистым знаком ~ ). Полученная точка
разность недостающих координат ( прямые, отмеченные волнистым знаком ~ ). Полученная точка  будет новой искомой горизонтальной проекцией вершины В треугольника. Так как точка Е стороны ВС неподвижна, то точка
будет новой искомой горизонтальной проекцией вершины В треугольника. Так как точка Е стороны ВС неподвижна, то точка  найдётся в пересечении продолжения
найдётся в пересечении продолжения  с продолжением перпендикуляра, опущенного из точки
с продолжением перпендикуляра, опущенного из точки  на
на  Новая горизонтальная проекция
Новая горизонтальная проекция  вершины А совпадает с точкой
вершины А совпадает с точкой 
Треугольник  является искомой истинной величиной треугольника ABC.
является искомой истинной величиной треугольника ABC.
Вращение вокруг фронтали по существу аналогично вращению вокруг горизонтали. При этом такую фигуру располагают в плоскости, параллельной плоскости  и строят её новую фронтальную проекцию.
и строят её новую фронтальную проекцию.
Метод перемены плоскостей проекций
Сущность метода заключается в том, что заданный геометрический элемент проецируется на новую плоскость проекций, обычно перпендикулярную к одной из старых плоскостей проекций. Новая плоскость проекций выбирается так, чтобы рассматриваемый элемент проецировался на неё наиболее удобно для решения поставленной задачи.
Методом перемены плоскостей проекций в большинстве случаев решают задачи по определению расстояний между заданными геометрическими элементами и определению истинных размеров плоских фигур.
Построение проекций геометрических элементов на новой плоскости проекций начнём с примера построения проекций точки.
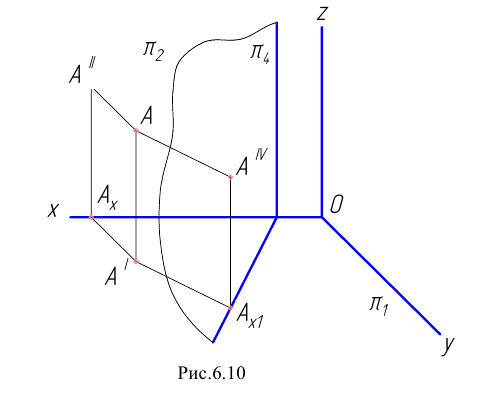
Пусть в косоугольных проекциях (Рис.6.10) даны плоскости  и
и  и точка А. Требуется построить проекцию точки А на новую фронтальную плоскость
и точка А. Требуется построить проекцию точки А на новую фронтальную плоскость  перпендикулярную к плоскости Линия пересечения плоскостей и
перпендикулярную к плоскости Линия пересечения плоскостей и  будет новой осью проекций
будет новой осью проекций  Построим сначала изображение проекции точки А на плоскость
Построим сначала изображение проекции точки А на плоскость  для чего покажем на чертеже изображение перпендикуляра, опущенного из горизонтальной проекции
для чего покажем на чертеже изображение перпендикуляра, опущенного из горизонтальной проекции  на ось ох (в натуре
на ось ох (в натуре  Точку
Точку  получим в пересечении перпендикуляра, восстановленного из точки
получим в пересечении перпендикуляра, восстановленного из точки  к оси
к оси  с перпендикуляром, опущенным из точки А на плоскость
с перпендикуляром, опущенным из точки А на плоскость 
Изображение проекции точки А на плоскость строится в той же последовательности. Строим изображение перпендикуляра, опущенного из горизонтальной проекции  на новую ось проекций
на новую ось проекций  (в натуре
(в натуре  и находим изображение искомой проекции точки
и находим изображение искомой проекции точки  на новой фронтальной плоскости , проводя
на новой фронтальной плоскости , проводя 
Отметим, что  т.е. при перемене плоскости
т.е. при перемене плоскости  ни новую фронтальную плоскость проекций, перпендикулярную к плоскости
ни новую фронтальную плоскость проекций, перпендикулярную к плоскости  , координата
, координата  проецируемой точки остаётся неизменной.
проецируемой точки остаётся неизменной.
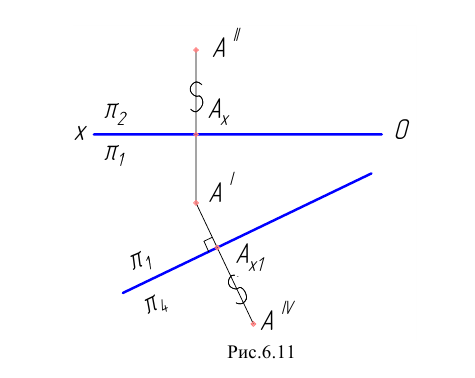
Рассмотрим решение задачи в прямоугольных проекциях. Пусть задана точка  в системе плоскостей
в системе плоскостей  и
и  (см. Рис.6.11). Требуется построить проекцию точки А на новую плоскость проекций, перпендикулярную к плоскости
(см. Рис.6.11). Требуется построить проекцию точки А на новую плоскость проекций, перпендикулярную к плоскости  Проведём произвольную прямую и примем её за новую ось проекций
Проведём произвольную прямую и примем её за новую ось проекций  Новую плоскость проекций
Новую плоскость проекций  совместим с плоскостью чертежа вращением вокруг оси Это вращение обычно производится так, чтобы избежать наложения дополнительного изображения на основные проекции. Новую фронтальную проекцию
совместим с плоскостью чертежа вращением вокруг оси Это вращение обычно производится так, чтобы избежать наложения дополнительного изображения на основные проекции. Новую фронтальную проекцию  получим, откладывая на продолжении перпендикуляра, опущенного из горизонтальной проекции
получим, откладывая на продолжении перпендикуляра, опущенного из горизонтальной проекции  на ось
на ось  отрезок
отрезок 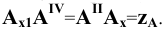
Построение проекций точек на новую плоскость проекций, перпендикулярную к плоскости  осуществляют в аналогичной последовательности.
осуществляют в аналогичной последовательности.
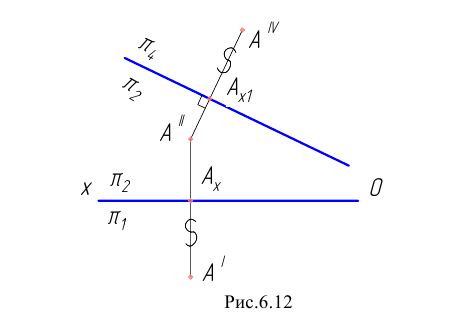
Пусть требуется построить новую проекцию точки  на горизонтальной плоскости проекций
на горизонтальной плоскости проекций  перпендикулярной к плоскости
перпендикулярной к плоскости  (см. Рис.6.12). Проведём новую произвольную ось проекций
(см. Рис.6.12). Проведём новую произвольную ось проекций  . Из фронтальной проекции
. Из фронтальной проекции  опускаем перпендикуляр на
опускаем перпендикуляр на  и на его продолжении откладываем отрезок
и на его продолжении откладываем отрезок 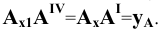 Проекция
Проекция  точки А называется новой горизонтальной проекцией точки. Отметим, что при перемене плоскости
точки А называется новой горизонтальной проекцией точки. Отметим, что при перемене плоскости  на новую плоскость проекций, перпендикулярную к плоскости
на новую плоскость проекций, перпендикулярную к плоскости  остаётся неизменной координата
остаётся неизменной координата  проецируемой точки.
проецируемой точки.
Рассмотрим пример построения новых проекций точки при последовательной перемене двух плоскостей проекций. Пусть дана точка  в системе плоскостей и (см. Рис.6. 13).
в системе плоскостей и (см. Рис.6. 13).
Новые проекции точки А будем строить, последовательно заменяя плоскость  на плоскость
на плоскость  а затем плоскость
а затем плоскость  на
на  Для этого проведём новую ось проекции
Для этого проведём новую ось проекции  и на перпендикуляре, опущенном из точки
и на перпендикуляре, опущенном из точки  на
на  отложим
отложим  В системе
В системе  координата
координата  а координата
а координата  Далее заменим плоскость
Далее заменим плоскость  на плоскость
на плоскость  Проведём новую ось проекции
Проведём новую ось проекции  и на перпендикуляре, опущенном из точки А на ось
и на перпендикуляре, опущенном из точки А на ось  , отложим отрезок
, отложим отрезок  Точка
Точка  новая горизонтальная проекция точки А. Таким образом, в результате последовательной перемены двух плоскостей проекций осуществлён переход от системы плоскостей
новая горизонтальная проекция точки А. Таким образом, в результате последовательной перемены двух плоскостей проекций осуществлён переход от системы плоскостей  и
и  к системе плоскостей
к системе плоскостей  и
и  в которой точка задана проекциями
в которой точка задана проекциями  и
и 
Решение задач методом перемены плоскостей проекций предусматривает, как правило, проецирование прямой на новую плоскость проекций, параллельную или перпендикулярную к ней (прямой).
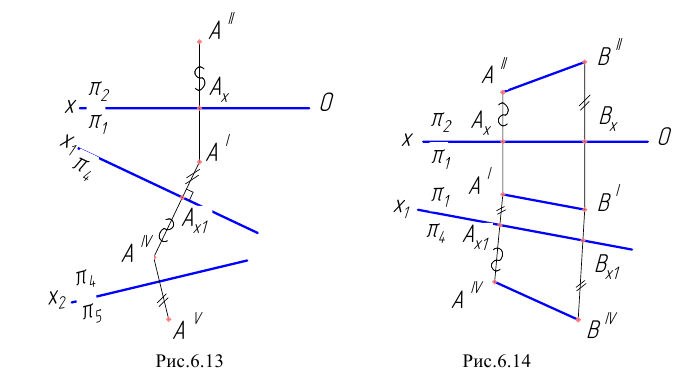
Пусть требуется определить истинную длину отрезка  прямой общего положения (см. Рис.6. 14).
прямой общего положения (см. Рис.6. 14).
Для этого спроецируем заданный отрезок на новую плоскость проекций, параллельную ему и перпендикулярную, например, к плоскости  Новые фронтальные проекции точек А и В находим, откладывая на перпендикулярах, опущенных из точек
Новые фронтальные проекции точек А и В находим, откладывая на перпендикулярах, опущенных из точек  и
и  на ось
на ось  отрезки
отрезки 
Отрезок  равен истинной длине отрезка АВ, так как в системе плоскостей
равен истинной длине отрезка АВ, так как в системе плоскостей  Необходимо отметить, что если концы заданного отрезка (точки А и В) имеют разные по знаку координаты, то значения этих координат откладываются в противоположные стороны по отношению к новой оси проекций.
Необходимо отметить, что если концы заданного отрезка (точки А и В) имеют разные по знаку координаты, то значения этих координат откладываются в противоположные стороны по отношению к новой оси проекций.
Рассмотрим пример преобразования отрезка прямой общего положения в отрезок, перпендикулярный к новой плоскости проекций. Эту задачу можно решить последовательной переменой двух плоскостей проекций. Сначала заданную прямую проецируют на плоскость, параллельную этой прямой и перпендикулярную к одной из плоскостей проекций, а затем — на плоскость, перпендикулярную к прямой и к предыдущей плоскости проекций.
Пусть задан отрезок  прямой общего положения (см. Рис.6.15).
прямой общего положения (см. Рис.6.15).
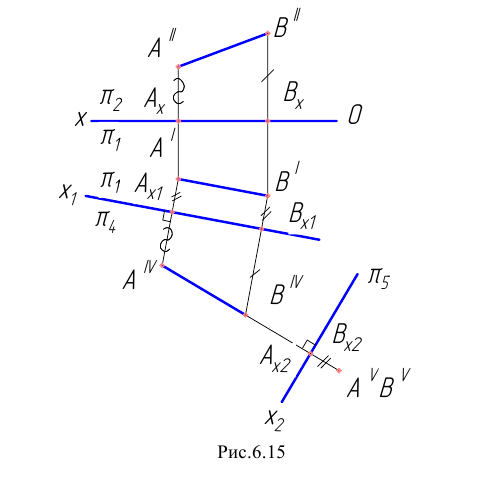
Требуется сделать эту прямую перпендикулярной к новой плоскости проекций. Для этого спроецируем заданный отрезок на плоскость  параллельную ему и перпендикулярную к плоскости
параллельную ему и перпендикулярную к плоскости  Новой фронтальной проекцией отрезка АВ будет
Новой фронтальной проекцией отрезка АВ будет  Далее заменим плоскость
Далее заменим плоскость  на новую
на новую  , перпендикулярную к отрезку и к плоскости
, перпендикулярную к отрезку и к плоскости  т.е. проведём
т.е. проведём  При перемене горизонтальной плоскости проекций неизменными будут координаты у точек А и В. Новые горизонтальные проекции
При перемене горизонтальной плоскости проекций неизменными будут координаты у точек А и В. Новые горизонтальные проекции  и
и  расположатся на общем перпендикуляре к
расположатся на общем перпендикуляре к  и на одинаковом расстоянии от
и на одинаковом расстоянии от 

Перейдём к построению методом перемены плоскостей проекций новых проекций плоскости. Пусть дано косоугольное изображение плоскости общего положения  в системе плоскостей
в системе плоскостей  и
и  (см- Рис.6.16).
(см- Рис.6.16).
Требуется построить изображение плоскости  в системе плоскостей
в системе плоскостей  и
и  , задав плоскость следами. Изобразим на чертеже произвольную плоскость
, задав плоскость следами. Изобразим на чертеже произвольную плоскость  , перпендикулярную к плоскости . Её горизонтальный след будет новой осью проекций
, перпендикулярную к плоскости . Её горизонтальный след будет новой осью проекций  . След
. След  сохранится прежним. Новым фронтальным следом плоскости а будет линия пересечения плоскостей и . Изображение этого следа
сохранится прежним. Новым фронтальным следом плоскости а будет линия пересечения плоскостей и . Изображение этого следа  получим, соединяя прямой точки пересечения соответствующих следов данных плоскостей
получим, соединяя прямой точки пересечения соответствующих следов данных плоскостей  Точка
Точка  — новая точка схода следов плоскости в системе плоскостей
— новая точка схода следов плоскости в системе плоскостей  и
и 
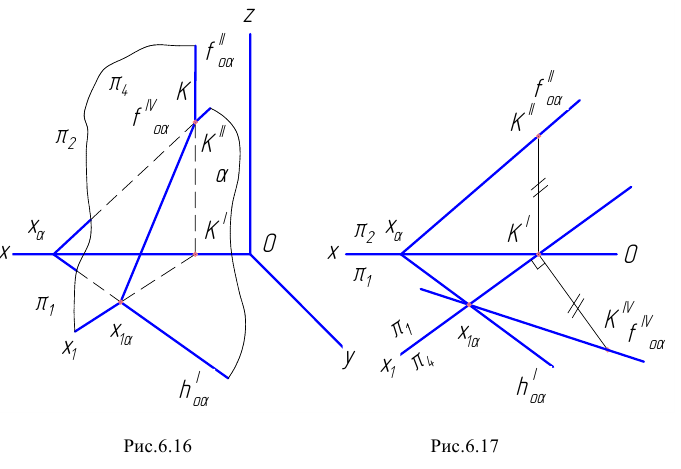
Покажем построение нового фронтального следа плоскости в прямоугольных проекциях. Пусть дана плоскость  в системе плоскостей
в системе плоскостей  и
и  (см. Рис.6.17). Требуется построить следы плоскости
(см. Рис.6.17). Требуется построить следы плоскости  в системе плоскостей и
в системе плоскостей и  , где
, где  — новая плоскость проекций, перпендикулярная к плоскости . Проведём произвольную прямую, пересекающую след
— новая плоскость проекций, перпендикулярная к плоскости . Проведём произвольную прямую, пересекающую след  и ось ох, и примем её за новую ось проекций
и ось ох, и примем её за новую ось проекций  . Построим новый фронтальный след плоскости а, совместив плоскость с плоскостью чертежа вращением вокруг оси
. Построим новый фронтальный след плоскости а, совместив плоскость с плоскостью чертежа вращением вокруг оси  . Точку
. Точку  схода следов имеем в пересечении следа
схода следов имеем в пересечении следа  с осью . Вторую точку
с осью . Вторую точку  следа
следа  найдём, построив новую фронтальную проекцию точки К пересечения фронтальных следов плоскостей
найдём, построив новую фронтальную проекцию точки К пересечения фронтальных следов плоскостей  и
и  Её горизонтальная проекция
Её горизонтальная проекция  расположена в точке пересечения осей
расположена в точке пересечения осей  и ох, а фронтальная проекция
и ох, а фронтальная проекция  — в пересечении перпендикуляра, восстановленного из точки к оси ох, со следом
— в пересечении перпендикуляра, восстановленного из точки к оси ох, со следом Новую фронтальную проекцию
Новую фронтальную проекцию  точки
точки  найдём, отложив на перпендикуляре к оси
найдём, отложив на перпендикуляре к оси  восстановленном из точки , значение координаты
восстановленном из точки , значение координаты  точки К. Прямая, проведённая из точки
точки К. Прямая, проведённая из точки  через точку будет новым фронтальным следом
через точку будет новым фронтальным следом  плоскости .
плоскости .
Методом перемены плоскостей проекций можно преобразовать плоскость общего положения в плоскость, проецирующую по отношению к новой плоскости проекций. Пусть требуется заданную плоскость  общего положения сделать перпендикулярной к новой плоскости проекций (см. Рис.6.18).
общего положения сделать перпендикулярной к новой плоскости проекций (см. Рис.6.18).
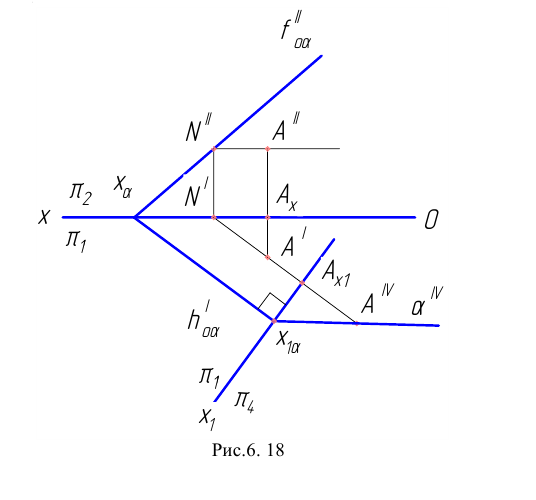
Заменим плоскость плоскостью , одновременно перпендикулярной к плоскости и к плоскости . Если плоскость перпендикулярна к плоскости , то в системе плоскостей и плоскость будет фронтально — проецирующей и её горизонтальный след перпендикулярен к новой оси проекций. С учётом изложенного проведём  и отметим новую точку схода следов
и отметим новую точку схода следов  . Второй точкой следа
. Второй точкой следа  будет новая фронтальная проекция любой точки, лежащей в плоскости
будет новая фронтальная проекция любой точки, лежащей в плоскости  Возьмём точку
Возьмём точку  на горизонтали NA плоскости
на горизонтали NA плоскости  и построим новую её фронтальную проекцию
и построим новую её фронтальную проекцию 
 и
и  Проведя прямую из точки
Проведя прямую из точки  через точку
через точку  получим новый фронтальный след
получим новый фронтальный след 
Построение можно упростить, если взять точку на следе заданной плоскости. Например, для преобразования плоскости 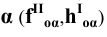 в проецирующую по отношению к плоскости
в проецирующую по отношению к плоскости  (см. Рис.6.19) проводим
(см. Рис.6.19) проводим  и строим новую фронтальную проекцию
и строим новую фронтальную проекцию  точки К, взятой на следе
точки К, взятой на следе 
 Прямая, проведённая из новой точки
Прямая, проведённая из новой точки  схода следов через точку
схода следов через точку  будет искомым новым фронтальным следом
будет искомым новым фронтальным следом 
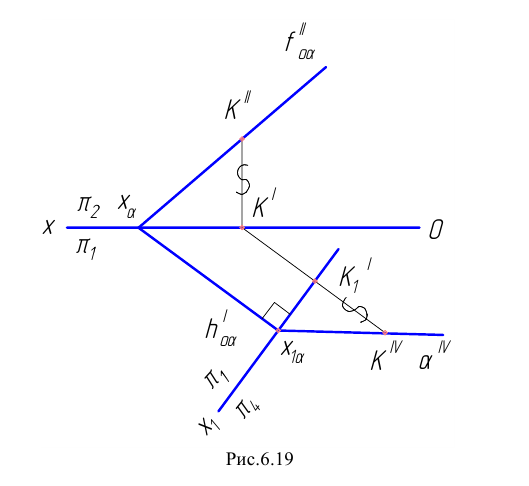
Пусть требуется определить истинную величину треугольника AВС, заданного проекциями  и
и  (см. Рис.6.20). Заменим плоскость
(см. Рис.6.20). Заменим плоскость  новой фронтальной плоскостью проекций
новой фронтальной плоскостью проекций  , перпендикулярной к плоскости треугольника. Для этого строим произвольную горизонталь треугольника.
, перпендикулярной к плоскости треугольника. Для этого строим произвольную горизонталь треугольника.
Горизонтальная проекция  горизонтали определяет направление горизонтального следа плоскости треугольника. Проведём
горизонтали определяет направление горизонтального следа плоскости треугольника. Проведём  и найдём новую фронтальную проекцию треугольника, построив новые фронтальные проекции его вершин.
и найдём новую фронтальную проекцию треугольника, построив новые фронтальные проекции его вершин.
Треугольник ABC спроецируется на плоскость  в виде прямой
в виде прямой  так как плоскость треугольника стала проецирующей.
так как плоскость треугольника стала проецирующей.
Произведём вторую перемену плоскости проекций, заменяя плоскость  новой плоскостью
новой плоскостью  , параллельной плоскости треугольника. Новой осью проекции
, параллельной плоскости треугольника. Новой осью проекции  будет прямая, параллельная проекции
будет прямая, параллельная проекции  треугольника.
треугольника.
Новые горизонтальные проекции  вершин найдём на перпендикулярах, опущенных из точек
вершин найдём на перпендикулярах, опущенных из точек 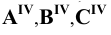 на ось
на ось  откладывая на них от оси
откладывая на них от оси  значения координат
значения координат  этих точек. Соединяя новые горизонтальные проекции точек прямыми линиями, получим истинную величину
этих точек. Соединяя новые горизонтальные проекции точек прямыми линиями, получим истинную величину  заданного треугольника.
заданного треугольника.
Отметим, что метод перемены плоскостей проекций обеспечивает получение чёткого чертежа, так как дополнительные построения не накладываются на основные проекции.
Основные метрические задачи
К метрическим задачам относят задачи на определение кратчайших расстояний между геометрическими элементами, определение истинных размеров углов между геометрическими элементами и определение истинных размеров геометрических элементов. Часть этих задач рассматривалась выше (определение истинной длины отрезка прямой линии, определение истинной величины плоской фигуры).
В этом разделе рассмотрим решение метрических задач с помощью метода вращения вокруг горизонтали (фронтали), а также метода перемены плоскостей проекций.
Рассмотрим следующие задачи:
- 1. Определить кратчайшее расстояние:
- 1.1. Между двумя точками
- 1.2. Между точкой и прямой
- 1.3. Между параллельными прямыми
- 1.4. Между скрещивающимися прямыми
- 1.5. От точки до плоскости
- 1.6. От прямой до параллельной ей плоскости
- 1.7. Между параллельными плоскостями
- 2. Определить истинную величину угла:
- 2.1. Между двумя пересекающимися прямыми
- 2.2. Между прямой и плоскостью
- 2.3. Между двумя плоскостями
1.1 Кратчайшее расстояние между двумя точками есть истинная длина отрезка, соединяющего эти точки (см. Рис.6.14)
1.2 Кратчайшим расстоянием отточки до прямой будет перпендикуляр, опущенный из этой точки на прямую (или её продолжение). Задача решается двумя переменами плоскостей проекций — прямую проецируют в точку (см. Рис.6.15), в ту же систему координат проецируют заданную точку и, соединяя две полученные точки, находят искомое расстояние (см. Рис.6.21) 
Чтобы найти положение точки  на проекции
на проекции  необходимо помнить, что если
необходимо помнить, что если  — истинная величина отрезка, то
— истинная величина отрезка, то  всегда параллельна оси
всегда параллельна оси 
Следует помнить, что  всегда больше (частный случай — равен) любой проекции
всегда больше (частный случай — равен) любой проекции 
1.3 Кратчайшее расстояние между параллельными прямыми — перпендикуляр, опущенный из любой точки одной прямой на другую (см. 1.2, Рис.6.21).
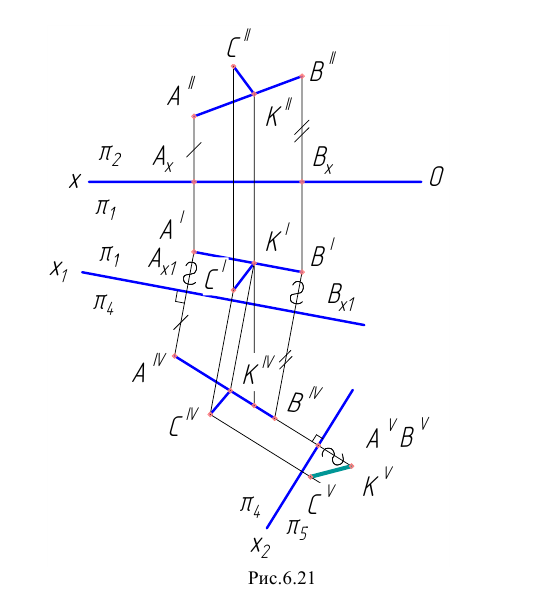
1.4 Чтобы найти кратчайшее расстояние между скрещивающимися прямыми, нужно двумя переменами плоскостей проекций одну из прямых спроецировать в точку, перенести в эту систему координат, вторую прямую и из полученной точки опустить перпендикуляр на проекцию прямой (см. Рис.6.22)
1.5 Кратчайшее расстояние от точки до плоскости — перпендикуляр, проведённый от этой точки к плоскости. Если плоскость проецирующая — это перпендикуляр от проекции точки к проецирующему следу плоскости (см. Рис.6.23, а). Если задана плоскость общего положения — одной переменой плоскостей проекций преобразуем её в проецирующую (см. Рис.6.18) и решаем задачу, как указано выше (см. Рис.6.23, б).
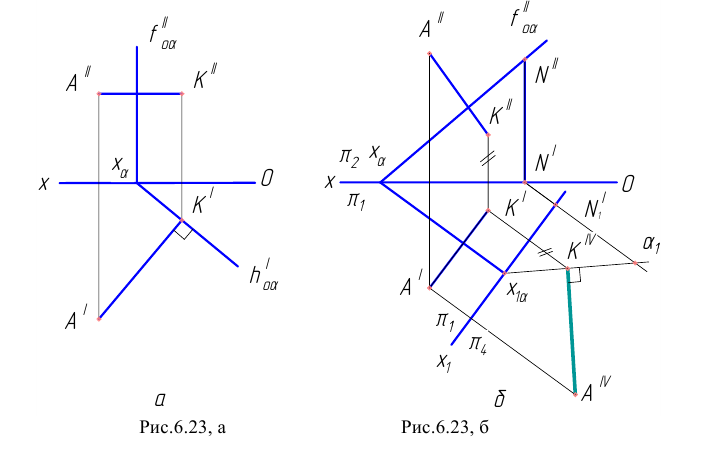
Если плоскость задана плоской фигурой — одной переменой плоскостей проекций преобразуем её в проецирующую (см. Рис.6.20) и опускаем на эту линию перпендикуляр из проекции заданной точки.
1.6 Так как прямая параллельна плоскости, то все её точки равноудалены от плоскости. Поэтому находим кратчайшее расстояние от любой точки этой прямой до плоскости (см. 1.5, Рис.6.23).
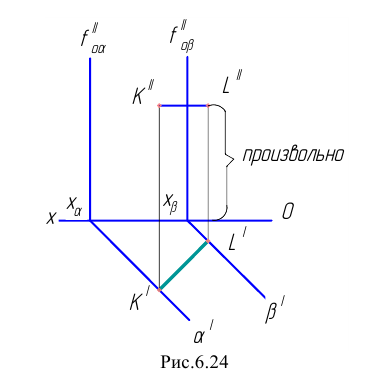
1.7 У параллельных плоскостей соответствующие следы параллельны. Если даны две проецирующие плоскости, то кратчайшее расстояние между ними — это перпендикуляр, проведённый в любом месте к проецирующим следам этих плоскостей (см. Рис.6.24). Если заданы параллельные плоскости общего положения — преобразуем их в проецирующие.
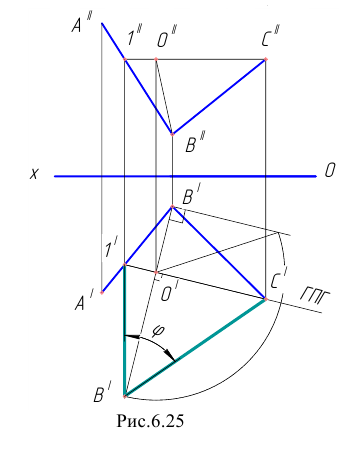
2.1 Для нахождения истинной величины угла между пересекающимися прямыми АВ и ВС применим метод вращения вокруг горизонтали (см. Рис.6.25). Проводим  — ФПГ находим
— ФПГ находим  ГПГ. При вращении
ГПГ. При вращении  вокруг горизонтали
вокруг горизонтали  точки 1 и С — неподвижны. Точкам В перемещается в пространстве по окружности, горизонтальная проекция которой — прямая
точки 1 и С — неподвижны. Точкам В перемещается в пространстве по окружности, горизонтальная проекция которой — прямая  (ГПГ). Откладывая от оси вращения
(ГПГ). Откладывая от оси вращения  истинную величину радиуса вращения
истинную величину радиуса вращения  (см. Рис.6. 9), получим истинную величину
(см. Рис.6. 9), получим истинную величину  т. е. истинную величину угла
т. е. истинную величину угла  между прямыми АВ и ВС.
между прямыми АВ и ВС.
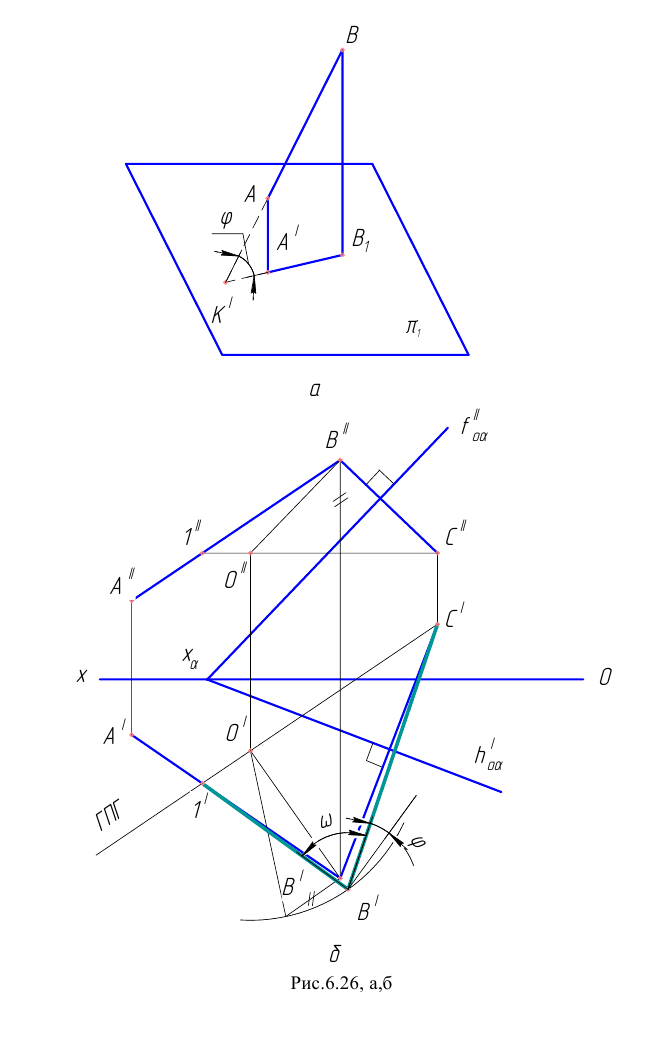
2.2 Прямая, не параллельная плоскости, составляет с ней некоторый угол . Для нахождения этого угла воспользуемся следующим рассуждением. Рассматривая прямоугольный треугольник  (Рис.6.26, а), нетрудно убедиться, что угол между прямой АВ и плоскостью
(Рис.6.26, а), нетрудно убедиться, что угол между прямой АВ и плоскостью  Если нужно найти угол между плоскостью
Если нужно найти угол между плоскостью  и прямой
и прямой 
 , то мы сначала найдём угол
, то мы сначала найдём угол  — между прямой АВ и перпендикуляром к плоскости
— между прямой АВ и перпендикуляром к плоскости  опущенным из произвольной точки прямой АВ.
опущенным из произвольной точки прямой АВ.
Пусть задана плоскость  и прямая
и прямая  Из точки В опустим перпендикуляр к плоскости
Из точки В опустим перпендикуляр к плоскости  Точка
Точка  выбрана произвольно. Вращением вокруг горизонтали
выбрана произвольно. Вращением вокруг горизонтали 
 находим истинную величину дополнительного угла
находим истинную величину дополнительного угла  (см. Рис.6.25). Находим
(см. Рис.6.25). Находим  (см. Рис.6.26, б).
(см. Рис.6.26, б).
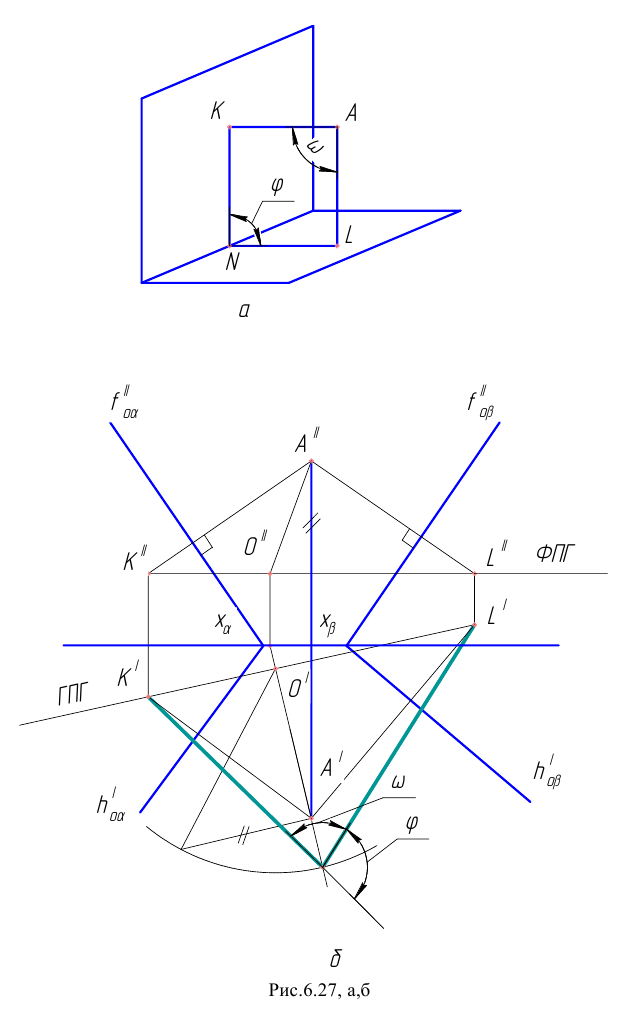
2.3 Две пересекающиеся плоскости образуют в пространстве четыре угла, два из них (противоположные) — острые, два — тупые ( частный случай — все углы прямые). Углом между плоскостями в начертательной геометрии принято считать острый угол.
Если из произвольной точки А в пространстве (Рис.6.27, а) опустить на пересекающиеся плоскости  и
и  перпендикуляры АК и AL, то угол между плоскостями будет равен
перпендикуляры АК и AL, то угол между плоскостями будет равен 
Воспользуемся этим рассуждением для нахождения угла между плоскостями  и (Рис.6.27, б). Из произвольной точки
и (Рис.6.27, б). Из произвольной точки  опускаем перпендикуляры к плоскостям и
опускаем перпендикуляры к плоскостям и  (точки К и L взяты произвольно). Проведя
(точки К и L взяты произвольно). Проведя  и
и  (ГПГ) находим истинную величину дополнительного угла
(ГПГ) находим истинную величину дополнительного угла  (см. Рис.6.25). Находим
(см. Рис.6.25). Находим  (см. Рис.6.27, б). Если найденный дополнительный угол
(см. Рис.6.27, б). Если найденный дополнительный угол  — острый, то он и будет углом между пересекающимися плоскостями.
— острый, то он и будет углом между пересекающимися плоскостями.
Методы преобразования проекций
Метод замены плоскостей проекций
Суть метода заключается в замене одной плоскости проекции на другую. При этом сам объект четко зафиксирован в пространстве. При такой замене величина координаты любой точки на вводимой плоскости будет такой же, как координаты той же точки на заменяемой плоскости.
Индексы при обозначении плоскости меняются с заменой самой плоскости проекций (четный индекс — на ближайшую четную цифру, нечетный индекс — на ближайшую нечетную).
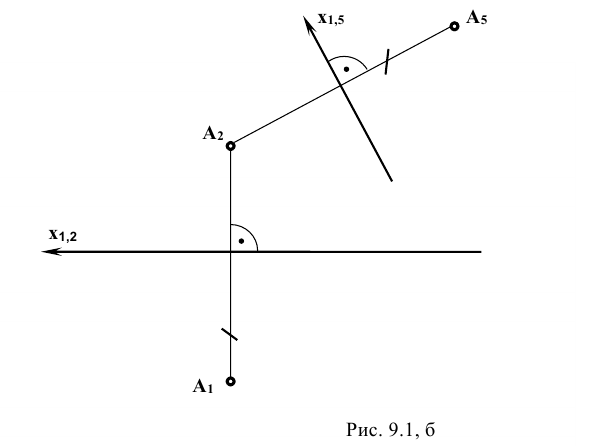
На комплексном чертеже преобразование выглядит следующим образом: например, если заменить фронтальную плоскость проекций  на новую плоскость
на новую плоскость  (рис. 9.1, а), то последняя должна быть перпендикулярна к плоскости
(рис. 9.1, а), то последняя должна быть перпендикулярна к плоскости  а расстояние от проекции точки
а расстояние от проекции точки  до оси
до оси  будет равно расстоянию от проекции точки
будет равно расстоянию от проекции точки  до оси
до оси  . Новая ось проекции
. Новая ось проекции  проводится так, как этого требует решение задачи. В рассматриваемом случае она проведена произвольно.
проводится так, как этого требует решение задачи. В рассматриваемом случае она проведена произвольно.
При замене горизонтальной плоскости на новую плоскость  (рис. 9.1, б) сохраняется неизменная координата Δу.
(рис. 9.1, б) сохраняется неизменная координата Δу.
При решении конкретной задачи таких замен может быть выполнено последовательно несколько (как правило, не более двух).
Главные условия этих действий — сохранение ортогонального проецирования в новой системе плоскостей проекций и величин соответствующих координат. Линии проекционной связи всегда должны быть перпендикулярны к оси координат, как в первоначальной, так и в новой системе плоскостей проекций.
Задание: Дана прямая общего положения АВ (рис. 9.2). Необходимо преобразовать чертеж таким образом, чтобы прямая стала проецирующей, т.е спроецировалась на одну из плоскостей проекции в точку.
Решение: Преобразование выполняется в два этапа. 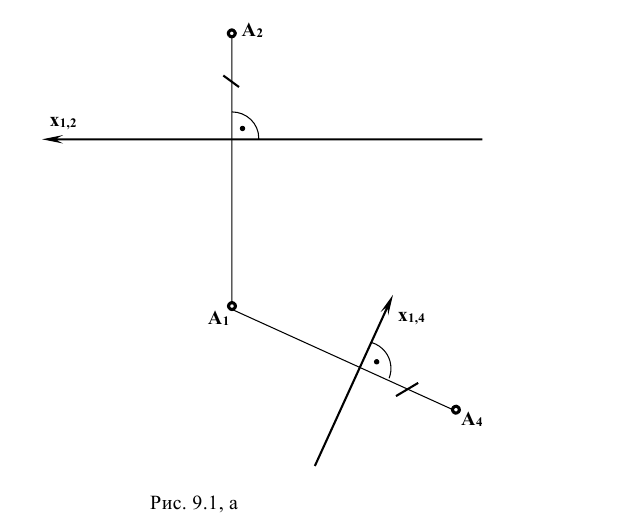
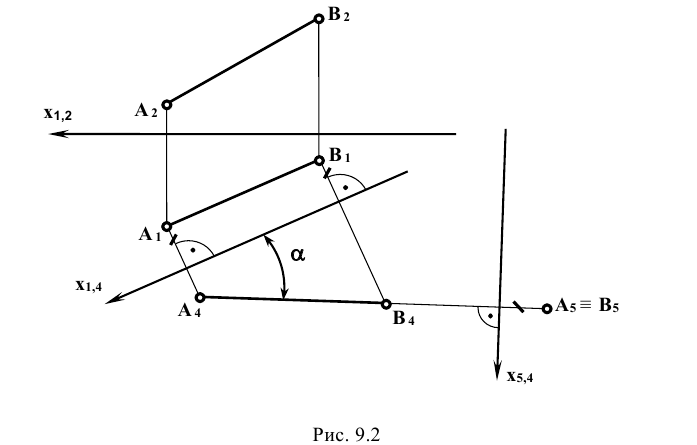
На первом этапе новую плоскость, например (), вводят взамен фронтальной плоскости , параллельно прямой АВ. Новую ось проекций проводят параллельно горизонтальной проекции прямой ( ). Далее проводят от горизонтальной проекции линии связи, перпендикулярные к новой оси проекций, и на них откладывают координаты z, т.е. расстояние от оси проекций до фронтальных проекций точек. Новая проекция
). Далее проводят от горизонтальной проекции линии связи, перпендикулярные к новой оси проекций, и на них откладывают координаты z, т.е. расстояние от оси проекций до фронтальных проекций точек. Новая проекция  будет определять натуральную длину отрезка АВ. Одновременно определяется угол наклона прямой к плоскости проекций, в рассматриваемом примере к горизонтальной плоскости
будет определять натуральную длину отрезка АВ. Одновременно определяется угол наклона прямой к плоскости проекций, в рассматриваемом примере к горизонтальной плоскости  – угол α.
– угол α.
Аналогично определяется угол наклона прямой АВ к плоскости и обозначается угол — β.
На втором этапе в системе плоскостей  / плоскость проекций
/ плоскость проекций  заменяют на
заменяют на  . При этом ось
. При этом ось  проводят перпендикулярно к проекции
проводят перпендикулярно к проекции  . В новой системе плоскостей проекций /
. В новой системе плоскостей проекций / прямая заняла проецирующее положение, т.е. она стала перпендикулярна к плоскости
прямая заняла проецирующее положение, т.е. она стала перпендикулярна к плоскости  , и на нее прямая спроецировалась в точку, а проекции концов отрезка АВ совпали (
, и на нее прямая спроецировалась в точку, а проекции концов отрезка АВ совпали ( ).
).
Способ применяется для определения расстояния между параллельными и скрещивающимися прямыми, величины двугранного угла, натуральной величины плоской фигуры.
В том случае, если прямые являются прямыми уровня, т.е. прямые параллельны одной из плоскостей проекций, первый этап решения опускается и преобразование начинается со второго этапа.
Метод вращение вокруг проецирующей оси
Этот метод заключается в том, что любая точка вращается вокруг какой-либо оси, перпендикулярной к одной из плоскостей проекции. При этом точка в пространстве движется по траектории — окружности, которая лежит в плоскости, перпендикулярной к оси вращения. Система плоскостей проекций остается неизменной.
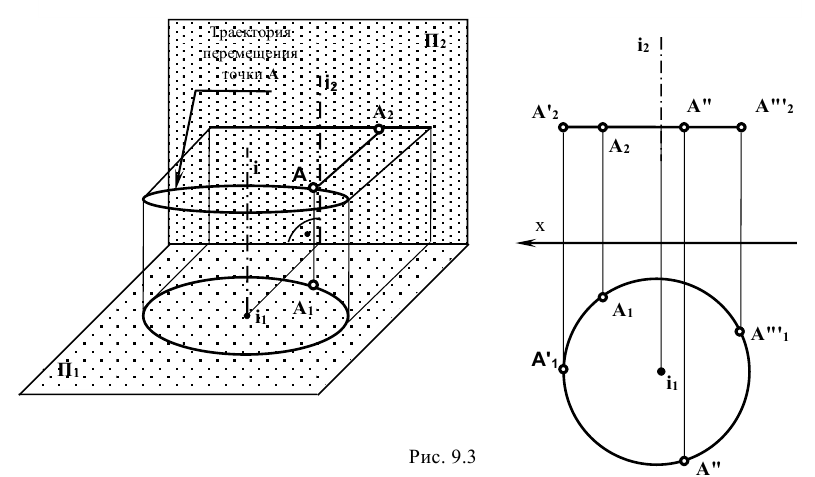
Например, при вращении точки А вокруг оси i (рис. 9.3), перпендикулярной к , она движется по траектории, которая проецируется на плоскость в виде окружности (точки 
 и т.д.), а на плоскость — в виде горизонтальной линии. Все фронтальные проекции точки А (
и т.д.), а на плоскость — в виде горизонтальной линии. Все фронтальные проекции точки А ( и т.д.) находятся на фронтальном следе горизонтальной плоскости. Точка
и т.д.) находятся на фронтальном следе горизонтальной плоскости. Точка  горизонтальная проекция оси i, а прямая
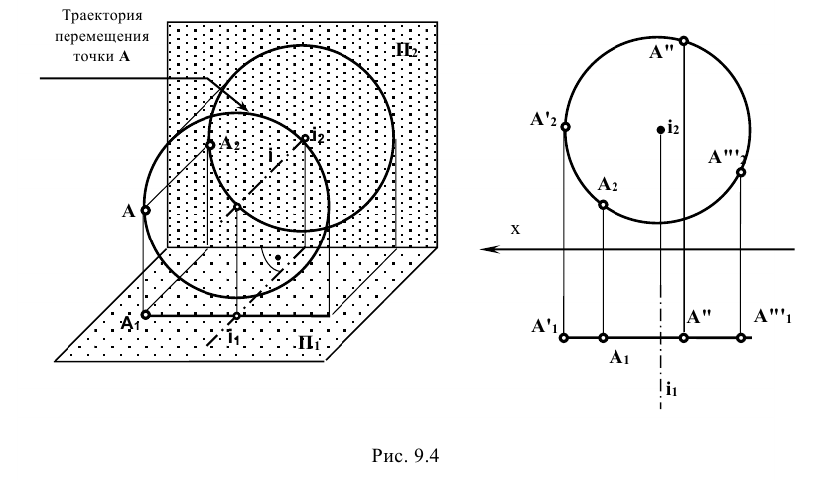
горизонтальная проекция оси i, а прямая  — ее фронтальная проекция. Если вращать точку А вокруг оси i, перпендикулярной к фронтальной плоскости проекций (рис. 9.4), то фронтальные проекции и т.д. точки А будут лежать на окружности,
— ее фронтальная проекция. Если вращать точку А вокруг оси i, перпендикулярной к фронтальной плоскости проекций (рис. 9.4), то фронтальные проекции и т.д. точки А будут лежать на окружности,
Траектория перемещения точки А плоскость которой перпендикулярна к оси i и горизонтальной плоскости проекции. При этом горизонтальные проекции и т.д. точки А будут расположены на прямой линии параллельной оси х и проходящей через горизонтальную проекцию точки 
Метод плоскопараллельного перемещения
Применение метода вращения вокруг проецирующей оси при преобразовании нередко приводит к наложению на исходную новых проекций. При этом чтение чертежа представляет определенные сложности. Избавиться от указанного недостатка позволяет метод плоскопараллельного перемещения.
Суть метода заключается в том, что все точки фигуры перемещаются в пространстве параллельно некоторой плоскости проекций. Это означает, что каждая точка объекта перемещается в плоскости уровня.
Например, прямая общего положения АВ, заданная своими проекциями  (рис. 9.5), перемещается таким образом, чтобы горизонтальная проекция
(рис. 9.5), перемещается таким образом, чтобы горизонтальная проекция  стала параллельной оси х.
стала параллельной оси х. 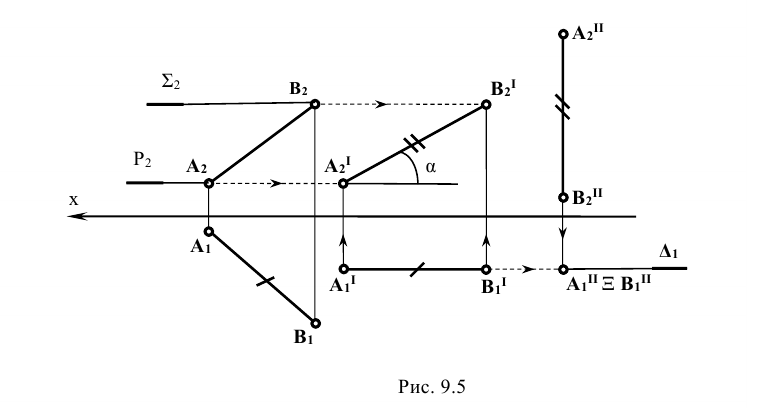
Траектория перемещения точки А
При этом фронтальная проекция прямой 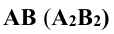 перемещаются параллельно оси х (фронтальные проекции концов отрезка займут новое положение
перемещаются параллельно оси х (фронтальные проекции концов отрезка займут новое положение  ) . При перемещении длина горизонтальной проекции отрезка АВ остается постоянной, а величина фронтальной проекции
) . При перемещении длина горизонтальной проекции отрезка АВ остается постоянной, а величина фронтальной проекции  станет равной натуральной величиной отрезка. При этом угол α — угол наклона прямой АВ к горизонтальной плоскости проекции
станет равной натуральной величиной отрезка. При этом угол α — угол наклона прямой АВ к горизонтальной плоскости проекции  .
.
При перемещении прямой АВ во фронтальной плоскости уровня можно достичь положения прямой, перпендикулярного плоскости
можно достичь положения прямой, перпендикулярного плоскости  . Этот метод применяется для определения натуральной величины отрезка, его угла наклона к плоскостям проекций, расстояния между параллельными прямыми и натуральной величины плоской фигуры.
. Этот метод применяется для определения натуральной величины отрезка, его угла наклона к плоскостям проекций, расстояния между параллельными прямыми и натуральной величины плоской фигуры.
Метод вращения вокруг линии уровня (частный случай метода вращения)
Суть метода заключается в том, что осью вращения выбирается одна из линий уровня — горизонталь или фронталь. Таким образом, плоскость как бы поворачивается вокруг некоторой оси, принадлежащей этой плоскости, до положения, параллельного одной из плоскостей проекций. Например, повернем плоский угол, образованный пересекающимися прямыми а и b (рис. 9.6).
Для решения поставленной задачи проводят в плоскости угла линию уровня (в данном случае горизонталь h) и используют ее как ось вращения, вокруг которой будут вращаться прямые а и b и вершина К. Все точки вращаются в плоскостях, перпендикулярных к горизонтали, при этом положение точек 1 и 2 остается неизменным, а точка К вращается вокруг горизонтали. Из горизонтальной проекции  точки К проводят линию, перпендикулярную к оси вращения
точки К проводят линию, перпендикулярную к оси вращения  .
.
Отрезок  — горизонтальная проекция радиуса вращения точки К. Находят натуральную величину этого радиуса (например способом прямоугольного треугольника).
— горизонтальная проекция радиуса вращения точки К. Находят натуральную величину этого радиуса (например способом прямоугольного треугольника).
На продолжении проекции прямой  откладывают натуральную величину радиуса
откладывают натуральную величину радиуса  и получают положение т. К после поворота (
и получают положение т. К после поворота ( ). Соединив точки
). Соединив точки 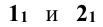 с точкой
с точкой  , получают натуральную величину угла при вершине К. Этим методом находится натуральная величина любой плоской фигуры, занимающей общее положение в пространстве.
, получают натуральную величину угла при вершине К. Этим методом находится натуральная величина любой плоской фигуры, занимающей общее положение в пространстве.
Метод совмещения плоскостей
Этот метод является частным случаем способа вращения вокруг линии уровня. В качестве оси вращения выбирается какой-либо след плоскости в которой лежит та или иная фигура. При этом каждая точка, принадлежащая рассматриваемой фигуре, при вращении перемещается в плоскости, перпендикулярной к следу той плоскости, в которой она лежит. Например, плоскость P, заданную своими следами и
и  , необходимо совместить с горизонтальной плоскостью проекций
, необходимо совместить с горизонтальной плоскостью проекций  (рис. 9.7).
(рис. 9.7).
Для решения поставленной задачи берут на фронтальном следе  плоскости P произвольную проекцию точки A и находят ее горизонтальную проекцию
плоскости P произвольную проекцию точки A и находят ее горизонтальную проекцию  , которая лежит на оси х. Из проекции
, которая лежит на оси х. Из проекции  точки А проводят луч, перпендикулярный к горизонтальному следу плоскости
точки А проводят луч, перпендикулярный к горизонтальному следу плоскости  (любая точка при вращении должна перемещаться в плоскости, перпендикулярной к оси поворота). На нем находят совмещенное положение точки A — точку
(любая точка при вращении должна перемещаться в плоскости, перпендикулярной к оси поворота). На нем находят совмещенное положение точки A — точку  , как точку пересечения луча с дугой окружности радиусом
, как точку пересечения луча с дугой окружности радиусом  (R вращения — радиус поворота проекции точки А). Точка
(R вращения — радиус поворота проекции точки А). Точка  принадлежит одновременно и плоскости
принадлежит одновременно и плоскости  и новому (совмещенному) положению плоскости P. Через точку
и новому (совмещенному) положению плоскости P. Через точку  проводят новый фронтальный след
проводят новый фронтальный след  плоскости P. Следы
плоскости P. Следы  и
и  характеризуют новое (совмещенное) положение плоскости P.
характеризуют новое (совмещенное) положение плоскости P.
Примеры решения задач
Ниже приведены решения одной и той же задачи вышеописанными методами.
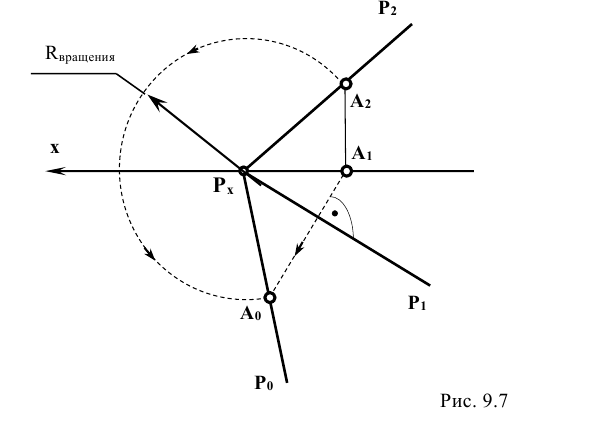
Задание: определить натуральную величину треугольника ABC (рис. 9.8), а также угол наклона плоскости треугольника к плоскости  .
.
Решение методом замены плоскостей проекций (рис. 9.9).
Плоскость треугольника спроецируется в натуральную величину в том случае, если она будет параллельна одной из плоскостей проекций. Одним преобразованием задачу решить невозможно. Она решается в два этапа: при первой замене плоскостей проекций получают плоскость треугольника ABC, перпендикулярную к новой плоскости проекций, при второй замене — получают плоскость треугольника, параллельную новой плоскости проекций.
Первый этап. Одним из условий перпендикулярности двух плоскостей является наличие прямой, принадлежащей одной из плоскостей, перпендикулярной к другой плоскости. Используя этот признак, проводят через точку А в плоскости треугольника горизонталь (h). Затем на произвольном расстоянии от горизонтальной проекции треугольника  проводят ось
проводят ось новой системы плоскостей проекций
новой системы плоскостей проекций  перпендикулярно к горизонтальной проекции горизонтали
перпендикулярно к горизонтальной проекции горизонтали . В новой системе треугольник ABC стал перпендикулярен к новой плоскости проекций
. В новой системе треугольник ABC стал перпендикулярен к новой плоскости проекций  .
.
На линиях проекционной связи в новой системе откладывают координаты z точек А, В, С с фронтальной проекции исходной системы плоскостей  .
. 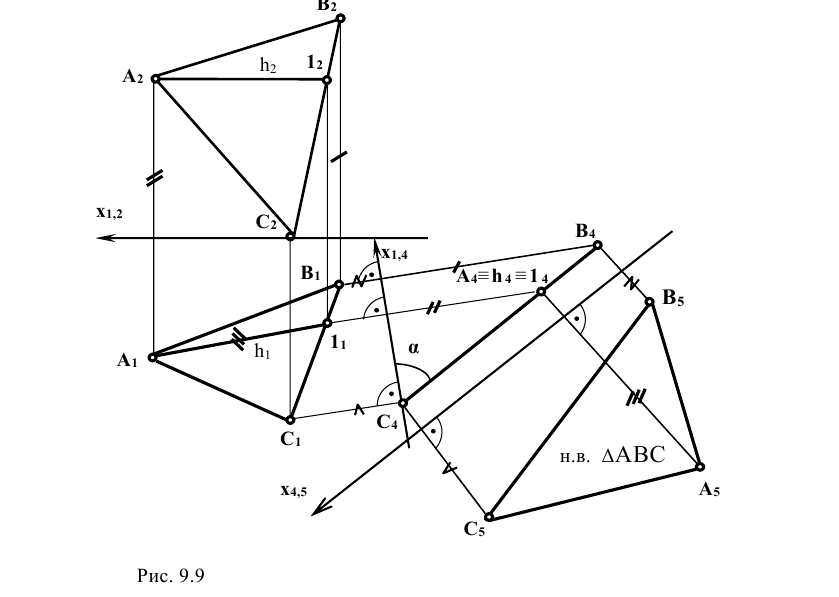
При соединении новых проекций 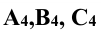 получают прямую линию, в которую спроецировался треугольник ABC. На этом этапе определяется угол наклона плоскости треугольника к горизонтальной плоскости проекции – угол α . На чертеже это угол между осью и проекцией
получают прямую линию, в которую спроецировался треугольник ABC. На этом этапе определяется угол наклона плоскости треугольника к горизонтальной плоскости проекции – угол α . На чертеже это угол между осью и проекцией 
Второй этап. Выбираем новую плоскость проекции  , параллельную плоскости треугольника, т.е. новую ось
, параллельную плоскости треугольника, т.е. новую ось  проводят параллельно
проводят параллельно  на произвольном расстоянии. Получают новую систему
на произвольном расстоянии. Получают новую систему  . Полученный треугольник
. Полученный треугольник  и есть искомая натуральная величина треугольника ABC.
и есть искомая натуральная величина треугольника ABC.
2) Решение методом вращения вокруг проецирующей оси (рис. 9.10).
Задача решается в два этапа. На первом этапе выполняют вращение так, чтобы плоскость треугольника ABC преобразовалась в проецирующую плоскость, т.е. стала перпендикулярна к одной из плоскостей проекций. Для этого проводят горизонталь h ( ) через точку А. (построение начинают с фронтальной проекции
) через точку А. (построение начинают с фронтальной проекции  , она проходит через проекцию точки
, она проходит через проекцию точки  и проекцию точки
и проекцию точки  при этом
при этом  параллельна оси х). Далее находят горизонтальную проекцию
параллельна оси х). Далее находят горизонтальную проекцию  горизонтали h (через проекции
горизонтали h (через проекции  и
и  ). Через точку А проводят ось i — ось вращения треугольника так, чтобы она была перпендикулярна к
). Через точку А проводят ось i — ось вращения треугольника так, чтобы она была перпендикулярна к  . На фронтальной проекции через вершины
. На фронтальной проекции через вершины  и
и  проводят следы горизонтальных плоскостей уровня Δ и Σ в которых при вращении будут перемещаться точки А и В.
проводят следы горизонтальных плоскостей уровня Δ и Σ в которых при вращении будут перемещаться точки А и В.
Вершина С принадлежит плоскости  поэтому ее плоскостью вращения будет плоскость проекций
поэтому ее плоскостью вращения будет плоскость проекций  . На горизонтальной проекции, взяв за центр вращения проекцию
. На горизонтальной проекции, взяв за центр вращения проекцию  поворачивают горизонталь А так, чтобы на плоскость
поворачивают горизонталь А так, чтобы на плоскость  она спроецировалась в точку. На чертеже это выразится тем, что
она спроецировалась в точку. На чертеже это выразится тем, что  займет новое положение — перпендикулярно к оси х.
займет новое положение — перпендикулярно к оси х.
При этом на фронтальной проекции остается неизменной, находясь на следе плоскости  и ее обозначим
и ее обозначим  .
.
На горизонтальной проекции поворачиваем оставшиеся вершины В и С вокруг оси i так, чтобы На фронтальной проекции вершина В перемещается по следу плоскости
На фронтальной проекции вершина В перемещается по следу плоскости  , а вершина С — по оси х. Соединив новые положения проекций всех вершин треугольника ABC, получают проекцию
, а вершина С — по оси х. Соединив новые положения проекций всех вершин треугольника ABC, получают проекцию  , сливающуюся в линию. Плоскость треугольника ABC заняла проецирующее положение. На данном этапе, при необходимости, находят угол наклона плоскости треугольника ABC к – угол α .
, сливающуюся в линию. Плоскость треугольника ABC заняла проецирующее положение. На данном этапе, при необходимости, находят угол наклона плоскости треугольника ABC к – угол α .
На втором этапе проводят ось j через вершину С так, чтобы ось была фронтально проецирующая. При этом  , а горизонтальная проекция
, а горизонтальная проекция  пройдет через проекцию
пройдет через проекцию  . Вокруг оси поворачивают треугольник так, чтобы он стал параллелен горизонтальной плоскости проекций. В данной задаче вращают точки
. Вокруг оси поворачивают треугольник так, чтобы он стал параллелен горизонтальной плоскости проекций. В данной задаче вращают точки  , вокруг
, вокруг  до совмещения с осью х, при этом проекции
до совмещения с осью х, при этом проекции  будут перемещаться параллельно оси х и займут новое положение
будут перемещаться параллельно оси х и займут новое положение  , и
, и  вершина С останется на месте. Соединив точки между собой, получают новое положение плоскости (оно соответствует натуральной величине треугольника ABC).
вершина С останется на месте. Соединив точки между собой, получают новое положение плоскости (оно соответствует натуральной величине треугольника ABC).
- Заказать чертежи
3) Решение методом плоскопараллельного перемещения (рис. 9.11).
Задача решается в два этапа. На первом этапе преобразуют чертеж так, чтобы плоскость треугольника ABC стала перпендикулярна к одной из плоскостей проекций. Для этого проводят в плоскости треугольника горизонталь h (фронтальная проекция  ,). Каждую вершину треугольника заключают в свою плоскость уровня, параллельную плоскости . В рассматриваемом примере вершина С принадлежит плоскости проекций , А принадлежит плоскости Σ, В — плоскости Δ.
,). Каждую вершину треугольника заключают в свою плоскость уровня, параллельную плоскости . В рассматриваемом примере вершина С принадлежит плоскости проекций , А принадлежит плоскости Σ, В — плоскости Δ.
Плоскость треугольника перемещается в пространстве до тех пор, пока горизонталь треугольника не станет перпендикулярна к фронтальной плоскости проекций .
Для этого на свободном поле чертежа вычерчивают горизонтальную проекцию треугольника  с условием, чтобы
с условием, чтобы  , а значит
, а значит  . При этом вершины треугольника, перемещаясь каждая в своей плоскости, займут новое положение – (фронтальная проекция
. При этом вершины треугольника, перемещаясь каждая в своей плоскости, займут новое положение – (фронтальная проекция  заменится
заменится  ). Соединив эти точки, получают новое положение треугольника ABC, спроецированного в линию, т.е. перпендикулярного к плоскости .
). Соединив эти точки, получают новое положение треугольника ABC, спроецированного в линию, т.е. перпендикулярного к плоскости .
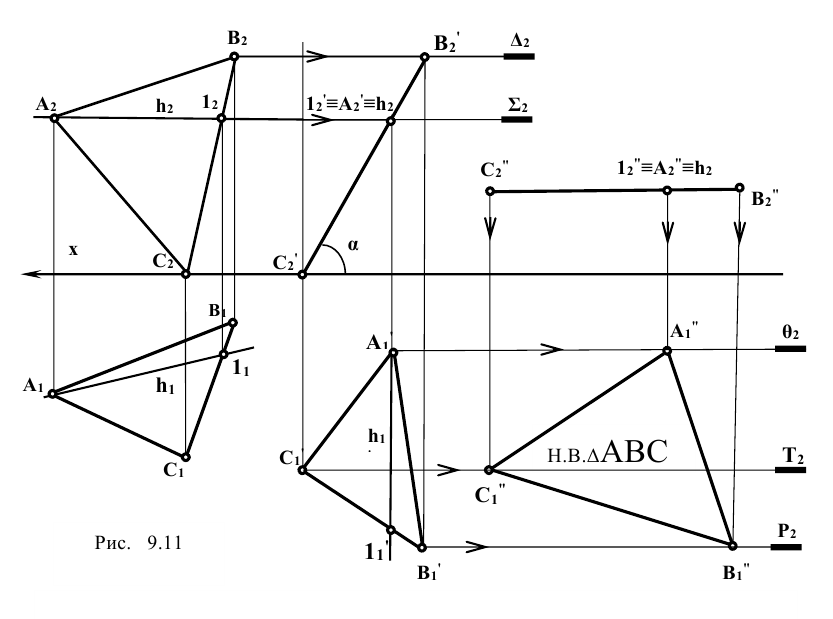
На втором этапе, чтобы получить натуральную величину треугольника ABC, его плоскость поворачивают до тех пор, пока она не будет параллельна одной из плоскостей проекций. В рассматриваемом решении фронтальную проекцию треугольник располагают на произвольном расстоянии от оси х параллельно плоскости . При этом вершины А, В и С треугольника заключают в горизонтально проецирующие плоскости θ, Т, Р. По следам этих плоскостей будут перемещаться горизонтальные проекции вершин  .
.
От нового положения фронтальной проекции  проводят линии проекционной связи до пресечения с соответствующими следами плоскостей, в которых они перемещаются (
проводят линии проекционной связи до пресечения с соответствующими следами плоскостей, в которых они перемещаются ( ), и получая проекции точек
), и получая проекции точек  .
.
Соединив эти проекции, получают треугольник ABC в натуральную величину.
4) Решение методом вращения вокруг линии уровня (рис.9.12)
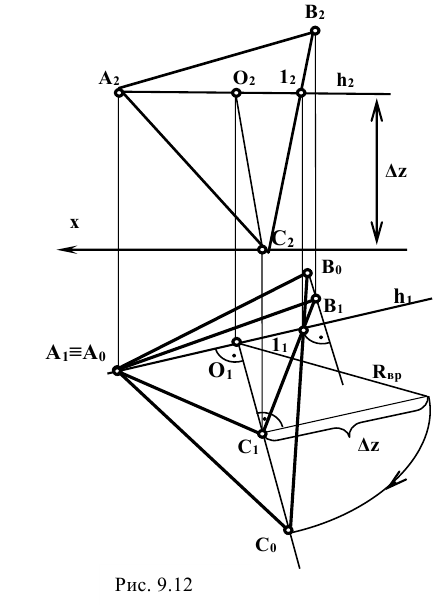
Для решения задачи этим способом необходимо повернуть плоскость треугольника вокруг линии уровня, в данном случае вокруг горизонтали, до положения, параллельного горизонтальной плоскости проекции. Через точку А в плоскости треугольника ABC проводят горизонталь h, фронтальная проекция которой будет параллельна оси х. Отмечают точку  и находят ее горизонтальную проекцию
и находят ее горизонтальную проекцию  . Прямая
. Прямая  является горизонтальной проекцией
является горизонтальной проекцией  горизонтали h. Вокруг горизонтали будут вращаться точки В и С.
горизонтали h. Вокруг горизонтали будут вращаться точки В и С.
Определяют натуральную величину радиуса вращения точки С. Для определения натуральной величины радиуса вращения используют любой метод (в данном случае способ прямоугольного треугольника) строят прямоугольный треугольник, в котором  — один из катетов. Второй катет — разность координат Δz отрезка
— один из катетов. Второй катет — разность координат Δz отрезка  , взятого с фронтальной проекции. В построенном треугольнике гипотенуза
, взятого с фронтальной проекции. В построенном треугольнике гипотенуза  — натуральная величина радиуса вращения.
— натуральная величина радиуса вращения.
На продолжении перпендикуляра откладывают  и получают новое положение вершины С после вращения —
и получают новое положение вершины С после вращения — . Проекция вершины
. Проекция вершины  получается пересечением луча
получается пересечением луча  и перпендикуляра к горизонтальной проекции
и перпендикуляра к горизонтальной проекции  проведенного через проекцию точки
проведенного через проекцию точки  .
.
Треугольник  есть искомая натуральная величина треугольника ABC.
есть искомая натуральная величина треугольника ABC.
5) Решение методом совмещения (рис. 9.13).
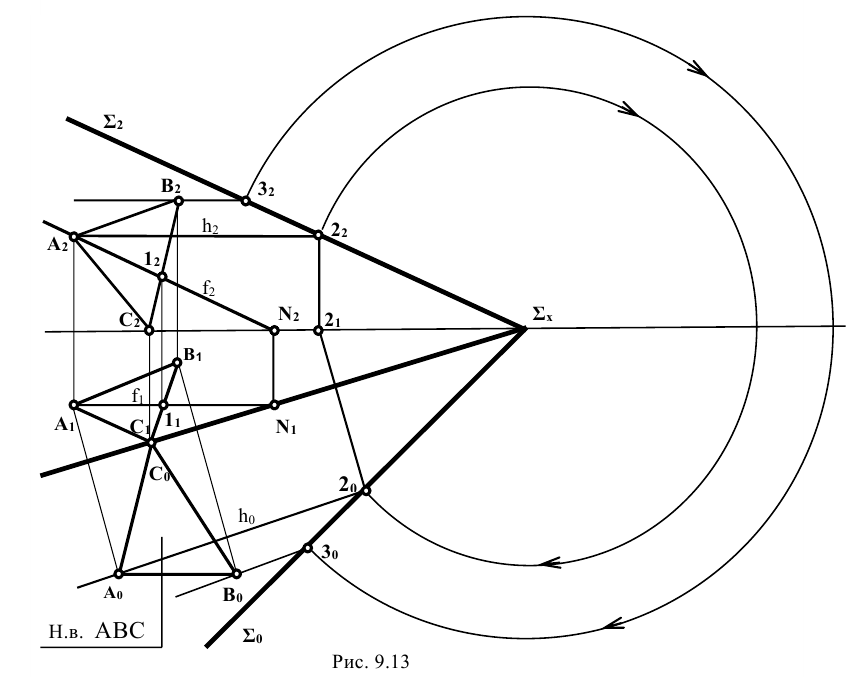
Для решения задачи методом совмещения необходимо построить следы плоскости Σ, которой принадлежит треугольник ABC. Для этого проводят в плоскости треугольника ABC фронталь f и находят горизонтальный след этой фронтали –  . По условию задачи вершина С треугольника принадлежит горизонтальной плоскости проекций
. По условию задачи вершина С треугольника принадлежит горизонтальной плоскости проекций  . Тогда горизонтальный след
. Тогда горизонтальный след  плоскости Σ проводят через проекции
плоскости Σ проводят через проекции  и
и  . Соединив эти две точки и продлив отрезок до пересечения с осью х, находят точку схода следов Σх . Учитывая, что все фронтали плоскости параллельны ее фронтальному следу, АВС фронтальный след
. Соединив эти две точки и продлив отрезок до пересечения с осью х, находят точку схода следов Σх . Учитывая, что все фронтали плоскости параллельны ее фронтальному следу, АВС фронтальный след  плоскости Σ проводят через точку Σх параллельно проекции фронтали
плоскости Σ проводят через точку Σх параллельно проекции фронтали  .
.
Для нахождения натуральной величины треугольника ABC необходимо построить совмещенное положение плоскости Σ с горизонтальной плоскостью проекций  . Для этого через вершину А проводят горизонталь . На фронтальном следе
. Для этого через вершину А проводят горизонталь . На фронтальном следе  фиксируют точку
фиксируют точку  . Ее горизонтальная проекция -точка
. Ее горизонтальная проекция -точка  . Точка 2 вращается в плоскости, перпендикулярной к горизонтальному следу плоскости Σ.
. Точка 2 вращается в плоскости, перпендикулярной к горизонтальному следу плоскости Σ.
Поэтому, чтобы построить точку 2 в совмещенном положении  , проводят из перпендикуляр к горизонтальному следу Σ, а из центра Σх дугу окружности радиусом Σх до пересечения с направлением перпендикуляра. Соединив Σх с
, проводят из перпендикуляр к горизонтальному следу Σ, а из центра Σх дугу окружности радиусом Σх до пересечения с направлением перпендикуляра. Соединив Σх с  , получают совмещенное положение фронтального следа
, получают совмещенное положение фронтального следа  — Далее через точку
— Далее через точку  проводят горизонталь
проводят горизонталь  в совмещенном положении. На этой горизонтали находят точку
в совмещенном положении. На этой горизонтали находят точку  , проведя перпендикуляр из точки
, проведя перпендикуляр из точки  к горизонтальному следу
к горизонтальному следу  .
.
По такой же схеме строят совмещенное положение точки .Совмещенное положение точки С совпадает с ее горизонтальной проекцией  т.е.
т.е.  ≡. Соединив построенные точки, получают треугольник
≡. Соединив построенные точки, получают треугольник  — это и есть натуральная величина треугольника ABC.
— это и есть натуральная величина треугольника ABC.
Способ вращения
Способ вращения базируется на нескольких основных положениях. При вращении вокруг некоторой неподвижной прямой (оси вращения):
- каждая точка вращаемой фигуры перемещается в плоскости, перпендикулярной оси вращения;
- каждая точка вращаемой фигуры перемещается по окружности, центр которой (центр вращения) находится в точке пересечения оси с плоскостью вращения;
- радиус вращения равен кратчайшему расстоянию от вращаемой точки до оси вращения;
- точки, расположенные на оси вращения, своего положения в пространстве не изменяют.
Ось вращения может быть задана или выбрана. В последнем случае выгодно использовать в качестве оси вращения прямые частного положения, перпендикулярные или параллельные плоскостям проекций.
Проекции, полученные после преобразования, условимся обозначать чертой над обозначением геометрического объекта, например: горизонтальная проекция  точки после первого преобразования
точки после первого преобразования  , после второго преобразования —
, после второго преобразования —  горизонтальный след плоскости
горизонтальный след плоскости  после первого преобразования
после первого преобразования  , после второго преобразования —
, после второго преобразования —  и т.д.
и т.д.
Вращение вокруг оси, перпендикулярной плоскости проекций
Повернем точку  вокруг оси
вокруг оси  , перпендикулярной плоскости
, перпендикулярной плоскости  , на некоторый угол
, на некоторый угол  (рис.75). Траектория перемещения точки в этом случае — окружность, лежащая в плоскости
(рис.75). Траектория перемещения точки в этом случае — окружность, лежащая в плоскости  . Плоскость перпендикулярна оси
. Плоскость перпендикулярна оси  и, значит, параллельна плоскости
и, значит, параллельна плоскости  . Траектория вращения точки на плоскость
. Траектория вращения точки на плоскость  проецируется без искажения.
проецируется без искажения.
Горизонтальная проекция этой траектории лежит на горизонтальном следе плоскости вращения  , параллельной оси
, параллельной оси  . Точка
. Точка  является центром вращения точки , а отрезок
является центром вращения точки , а отрезок  — радиусом вращения точки .
— радиусом вращения точки .
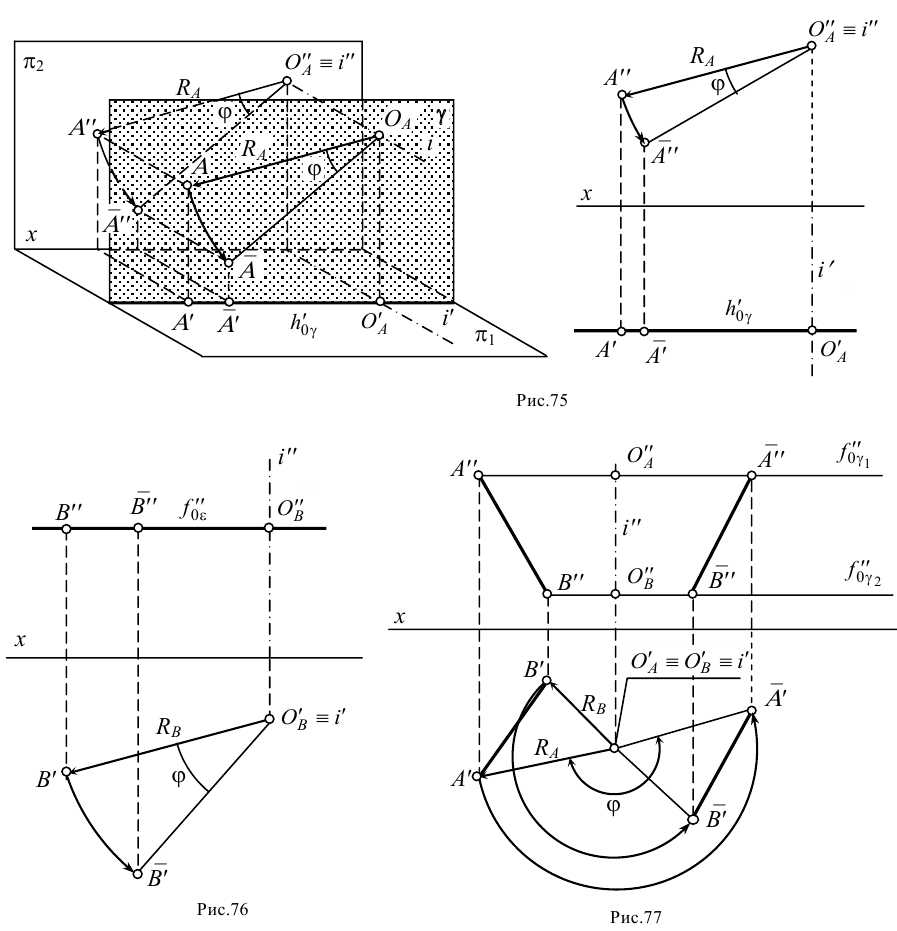
Теперь рассмотрим вращение некоторой точки  вокруг оси, перпендикулярной горизонтальной плоскости проекций (рис.76). На горизонтальную плоскость проекций ось вращения
вокруг оси, перпендикулярной горизонтальной плоскости проекций (рис.76). На горизонтальную плоскость проекций ось вращения  спроецировалась в точку, а на фронтальную — в прямую, перпендикулярную оси
спроецировалась в точку, а на фронтальную — в прямую, перпендикулярную оси  .
.
При вращении точки вокруг оси  ее горизонтальная проекция вращается по дуге окружности, а фронтальная — перемещается по прямой, совпадающей с фронтальным следом плоскости вращения
ее горизонтальная проекция вращается по дуге окружности, а фронтальная — перемещается по прямой, совпадающей с фронтальным следом плоскости вращения  .
.
Таким образом, при вращении точки вокруг оси, перпендикулярной одной из плоскостей проекций, проекция точки на эту плоскость перемещается по дуге окружности радиусом, равным радиусу вращения. Проекция этой точки на другую плоскость проекций перемещается по прямой, перпендикулярной оси вращения.
Для вращения отрезка  вокруг оси, перпендикулярной плоскости
вокруг оси, перпендикулярной плоскости  на некоторый угол
на некоторый угол  (рис.77) нужно повернуть на этот угол любые две его точки (например, концы отрезка -точки
(рис.77) нужно повернуть на этот угол любые две его точки (например, концы отрезка -точки  и
и  ).
).
Горизонтальные проекции этих точек при этом перемещаются в горизонтальных плоскостях  и
и  по дугам окружностей на один и тот же угол . Фронтальные проекции точек и
по дугам окружностей на один и тот же угол . Фронтальные проекции точек и  перемещаются по прямым, параллельным оси , являющимся фронтальными следами плоскостей вращения —
перемещаются по прямым, параллельным оси , являющимся фронтальными следами плоскостей вращения —  и
и  . Точки
. Точки  и
и  — центры вращения этих точек.
— центры вращения этих точек.
Таким образом, при вращении отрезка прямой вокруг оси, перпендикулярной плоскости проекций, длина проекции отрезка прямой на эту плоскость не изменяется.
Вращение прямой значительно упрощается, если ось проходит через одну из точек вращаемой прямой, так как при этом достаточно повернуть лишь одну точку, принадлежащую прямой. На рис.78 ось вращения  проведена перпендикулярно плоскости
проведена перпендикулярно плоскости  через точку
через точку  (положение этой точки при преобразовании изменяться не будет).
(положение этой точки при преобразовании изменяться не будет).
Затем отрезок  повернут вокруг оси в положение, параллельное плоскости
повернут вокруг оси в положение, параллельное плоскости  . При этом горизонтальная проекция отрезка вращается до положения
. При этом горизонтальная проекция отрезка вращается до положения  , параллельного оси
, параллельного оси  . Тогда на фронтальную плоскость проекций этот отрезок спроецируется в натуральную величину, а угол
. Тогда на фронтальную плоскость проекций этот отрезок спроецируется в натуральную величину, а угол  между ее фронтальной проекцией и осью будет равен углу наклона этой прямой к плоскости .
между ее фронтальной проекцией и осью будет равен углу наклона этой прямой к плоскости .
Аналогично, вращением вокруг оси, перпендикулярной плоскости , может быть найдена истинная величина отрезка и угол его наклона к плоскости .
Вращение плоскости сводится к вращению вокруг заданной оси принадлежащих ей геометрических элементов (точек, прямых линий и пр.).
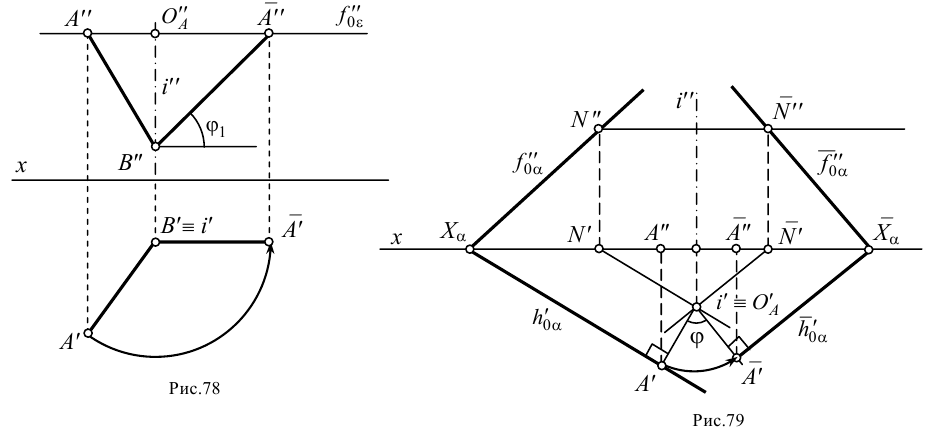
При вращении плоскости, заданной следами, обычно поворачивают один из ее следов и горизонталь (или фронталь) плоскости. Например, для поворота плоскости  вокруг оси на некоторый угол
вокруг оси на некоторый угол  на горизонтальном следе
на горизонтальном следе  выбрана некоторая точка
выбрана некоторая точка  , ближайшая к оси вращения (рис.79). Точка
, ближайшая к оси вращения (рис.79). Точка  повернута на угол
повернута на угол  и через новое положение точки
и через новое положение точки  перпендикулярно
перпендикулярно  проведен след
проведен след  .
.
Затем в плоскости  проведена горизонталь, пересекающая ось вращения. В новом положении горизонтальная проекция горизонтали также будет проходить через ось вращения
проведена горизонталь, пересекающая ось вращения. В новом положении горизонтальная проекция горизонтали также будет проходить через ось вращения  параллельно
параллельно  . Фронтальный след
. Фронтальный след  проведен через точку схода следов
проведен через точку схода следов  и
и  .
.
Пример 12. Определить угол наклона плоскости общего положения  , заданной следами, к горизонтальной плоскости проекций (рис.80).
, заданной следами, к горизонтальной плоскости проекций (рис.80).
Плоскость  преобразуем во фронтально-проецирующую плоскость путем ее вращения вокруг оси , расположенной в плоскости
преобразуем во фронтально-проецирующую плоскость путем ее вращения вокруг оси , расположенной в плоскости  перпендикулярно оси
перпендикулярно оси  . Ось проведена через произвольную точку
. Ось проведена через произвольную точку  фронтального следа
фронтального следа  . След
. След  построен аналогично, но так, чтобы в новом положении он был перпендикулярен оси . Новое положение фронтального следа
построен аналогично, но так, чтобы в новом положении он был перпендикулярен оси . Новое положение фронтального следа  пройдет через проекцию
пройдет через проекцию  и новое положение точки схода следов
и новое положение точки схода следов  .
.
Таким образом,  — искомый угол наклона плоскости к горизонтальной плоскости проекций.
— искомый угол наклона плоскости к горизонтальной плоскости проекций.
Пример 13. Определить истинную величину треугольника  (рис.81).
(рис.81).
Для определения истинной величины треугольника  поворачиваем его дважды: сначала в положение, перпендикулярное плоскости , а затем в положение, параллельное плоскости
поворачиваем его дважды: сначала в положение, перпендикулярное плоскости , а затем в положение, параллельное плоскости  . Тогда в итоге на горизонтальную плоскость проекций треугольник спроецируется без искажения.
. Тогда в итоге на горизонтальную плоскость проекций треугольник спроецируется без искажения.
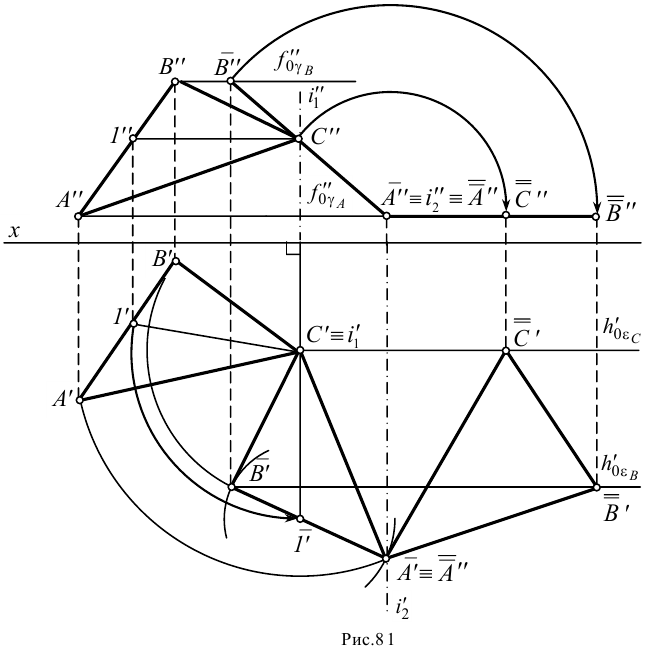
1. Задаем ось вращения  и проводим в плоскости треугольника горизонталь
и проводим в плоскости треугольника горизонталь  . Если повернуть треугольник вокруг оси
. Если повернуть треугольник вокруг оси  в положение, перпендикулярное фронтальной плоскости проекций , то его горизонталь
в положение, перпендикулярное фронтальной плоскости проекций , то его горизонталь  примет положение, перпендикулярное оси
примет положение, перпендикулярное оси 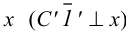 .
.
Точка  , лежащая на оси вращения
, лежащая на оси вращения  , своего положения не изменит. Взаимное положение проекций вершин треугольника на горизонтальной плоскости проекций при этом не изменится.
, своего положения не изменит. Взаимное положение проекций вершин треугольника на горизонтальной плоскости проекций при этом не изменится.
Положение точек  и
и  определяем следующим путем: из
определяем следующим путем: из  проводим дуги окружностей радиусами
проводим дуги окружностей радиусами  и
и  и на этих дугах делаем засечки из точки
и на этих дугах делаем засечки из точки  радиусами соответственно
радиусами соответственно  и
и 
 .
.
2. На фронтальной плоскости проекций проекции вершин треугольника  и
и  будут находиться на пересечении фронтальных следов плоскостей вращения
будут находиться на пересечении фронтальных следов плоскостей вращения  и
и  и линий проекционных связей, проведенных из
и линий проекционных связей, проведенных из  и
и  . На плоскости
. На плоскости  проекция треугольника
проекция треугольника  преобразовалась в отрезок прямой линии.
преобразовалась в отрезок прямой линии.
3. Затем через  проводим вторую ось вращения
проводим вторую ось вращения  , но уже перпендикулярно фронтальной плоскости проекций
, но уже перпендикулярно фронтальной плоскости проекций  . Если треугольник повернуть в положение, параллельное плоскости
. Если треугольник повернуть в положение, параллельное плоскости  , то проекция
, то проекция  окажется параллельной оси
окажется параллельной оси  (положение точки
(положение точки  , лежащей на оси вращения
, лежащей на оси вращения  , остается неизменным). Горизонтальные проекции
, остается неизменным). Горизонтальные проекции  и
и  находятся в пересечении плоскостей вращения
находятся в пересечении плоскостей вращения  и
и  с линиями проекционных связей, проведенными соответственно из
с линиями проекционных связей, проведенными соответственно из  и
и  . Треугольник
. Треугольник  будет истинной величиной треугольника
будет истинной величиной треугольника 
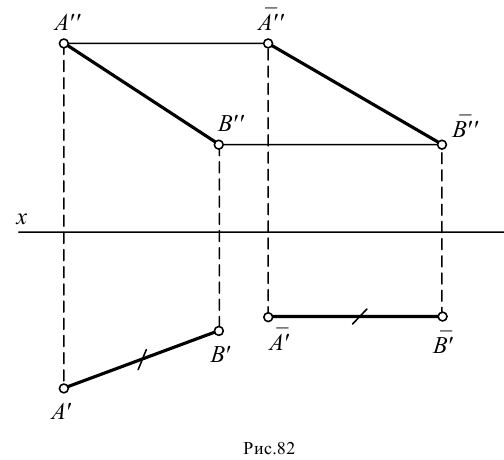
Плоскопараллельное перемещение
Плоскопараллельное перемещение представляет собой частный случай способа вращения вокруг оси, перпендикулярной плоскости проекций  или
или  , при котором на чертеже не изображается ось вращения и не устанавливается радиус вращения. Это делается для того, чтобы избежать наложения исходных и дополнительных проекций.
, при котором на чертеже не изображается ось вращения и не устанавливается радиус вращения. Это делается для того, чтобы избежать наложения исходных и дополнительных проекций.
Новые проекции допускается перемещать на свободное поле чертежа. При этом одна из исходных проекций рассматриваемой геометрической фигуры перемещается в требуемое положение, не изменяя своего вида и размера.
Сущность способа разберем на примере определения истинной величины отрезка прямой общего положения (рис.82). Прямую  переместим в плоскости вращения так, что ее горизонтальная проекция оказалась параллельной оси
переместим в плоскости вращения так, что ее горизонтальная проекция оказалась параллельной оси  . Тогда сама прямая
. Тогда сама прямая  будет параллельна плоскости и ее фронтальная проекция будет истинной величиной заданного отрезка.
будет параллельна плоскости и ее фронтальная проекция будет истинной величиной заданного отрезка.
Пример 14. Методом плоскопараллельного перемещения определить истинную величину треугольника  (рис.83).
(рис.83).
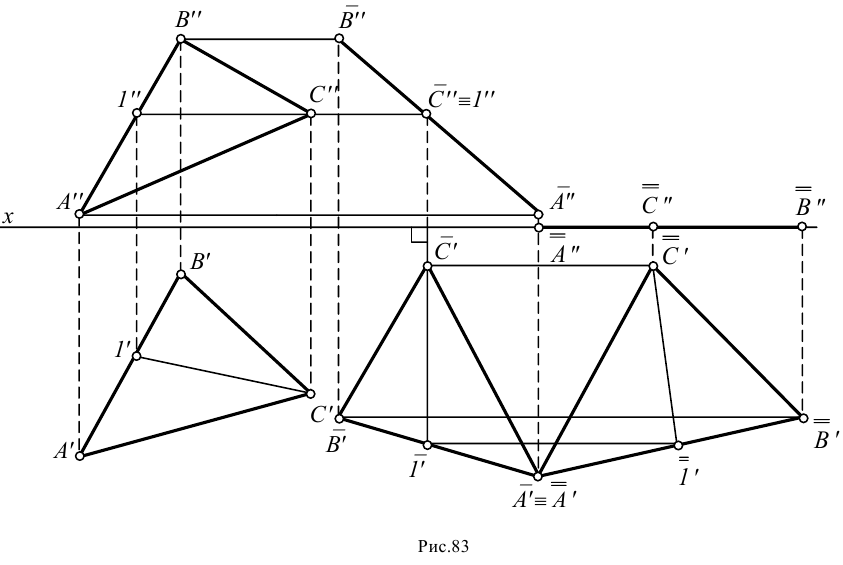
Так же, как и в примере 13, задача решается в два приема.
Сначала плоскость треугольника  преобразуем в положение, перпендикулярное фронтальной плоскости проекций, и она станет фронтально-проецирующей. В этом положении горизонтальная проекция горизонтали
преобразуем в положение, перпендикулярное фронтальной плоскости проекций, и она станет фронтально-проецирующей. В этом положении горизонтальная проекция горизонтали  плоскости треугольника примет положение, перпендикулярное оси , а на фронтальную плоскость проекций треугольник
плоскости треугольника примет положение, перпендикулярное оси , а на фронтальную плоскость проекций треугольник  спроецируется в виде отрезка прямой
спроецируется в виде отрезка прямой  . Горизонтальные проекции
. Горизонтальные проекции  и
и  равны, а место расположения проекции треугольника
равны, а место расположения проекции треугольника  — произвольное.
— произвольное.
Затем плоскость треугольника поворачиваем в положение, параллельное горизонтальной плоскости проекций (в нашем случае  ). Горизонтальная проекция треугольника
). Горизонтальная проекция треугольника  будет его истинной величиной.
будет его истинной величиной.
Вращение вокруг оси, параллельной плоскости проекций
Рассмотрим вращение точки  вокруг горизонтали
вокруг горизонтали  (рис.84). Точка
(рис.84). Точка  будет вращаться в плоскости
будет вращаться в плоскости  , перпендикулярной оси вращения
, перпендикулярной оси вращения  и, следовательно, являющейся горизонтально-проецирующей. Повернем точку
и, следовательно, являющейся горизонтально-проецирующей. Повернем точку  так, чтобы отрезок
так, чтобы отрезок  , равный радиусу вращения
, равный радиусу вращения  , занял положение, параллельное горизонтальной плоскости проекций. Тогда на эту плоскость отрезок спроецируется без искажения.
, занял положение, параллельное горизонтальной плоскости проекций. Тогда на эту плоскость отрезок спроецируется без искажения.
Изобразим вращение точки  на эпюре (рис.84). Радиус вращения точки
на эпюре (рис.84). Радиус вращения точки  как на горизонтальную (отрезок
как на горизонтальную (отрезок  ), так и на фронтальную (отрезок ) плоскости проекций проецируется с искажением. Определим истинную величину радиуса вращения методом прямоугольного треугольника, одним катетом которого является проекция
), так и на фронтальную (отрезок ) плоскости проекций проецируется с искажением. Определим истинную величину радиуса вращения методом прямоугольного треугольника, одним катетом которого является проекция  , а вторым — разность координат по оси
, а вторым — разность координат по оси  . Гипотенуза построенного прямоугольного треугольника
. Гипотенуза построенного прямоугольного треугольника  -истинная величина радиуса вращения точки
-истинная величина радиуса вращения точки  .
.
Новое положение точки  должно находиться на следе
должно находиться на следе  на расстоянии от проекции центра вращения
на расстоянии от проекции центра вращения  . Как правило, этот отрезок переносят на след при помощи дуги окружности с центром в точке
. Как правило, этот отрезок переносят на след при помощи дуги окружности с центром в точке  .
.
Рассмотрим треугольник  (рис.84). При его вращении вокруг горизонтали
(рис.84). При его вращении вокруг горизонтали  в положение
в положение  он окажется параллельным плоскости
он окажется параллельным плоскости  . Следовательно, его проекция
. Следовательно, его проекция  будет его истинной величиной. И на эпюре треугольник
будет его истинной величиной. И на эпюре треугольник  выражает истинную величину треугольника .
выражает истинную величину треугольника .
Таким образом, любую плоскую фигуру можно повернуть вокруг горизонтали в положение, параллельное горизонтальной плоскости проекций, и получить ее истинную величину.
Рассмотрим определение истинной величины треугольника  (рис.85). В качестве оси вращения выберем любую горизонталь плоскости треугольника
(рис.85). В качестве оси вращения выберем любую горизонталь плоскости треугольника  , например проходящую через вершину
, например проходящую через вершину  .
.
При решении задачи будем руководствоваться основными положениями способа вращения:
Поскольку ось вращения  параллельна горизонтальной плоскости проекций, новые положения точек
параллельна горизонтальной плоскости проекций, новые положения точек  и
и  будут находиться на следах соответственно
будут находиться на следах соответственно  и
и  .
.
Точки  и
и 
 — центры вращения вершин треугольника и -лежат в пересечении горизонтальных следов плоскостей вращения с осью вращения.
— центры вращения вершин треугольника и -лежат в пересечении горизонтальных следов плоскостей вращения с осью вращения.
Радиусы вращения вершин и проецируются на плоскости проекций  и
и  с искажением. Для построения нового положения точки
с искажением. Для построения нового положения точки  (точки
(точки  ) достаточно методом прямоугольного треугольника найти истинную величину радиуса вращения
) достаточно методом прямоугольного треугольника найти истинную величину радиуса вращения  , и отложить его на горизонтальном следе плоскости вращения . По построению проекция
, и отложить его на горизонтальном следе плоскости вращения . По построению проекция  находится в пересечении прямой
находится в пересечении прямой  и следа .
и следа .
Фигура  — истинная величина заданного треугольника.
— истинная величина заданного треугольника.
Аналогично рассмотренному примеру можно найти истинную величину любой плоской фигуры вращением вокруг фронтали.
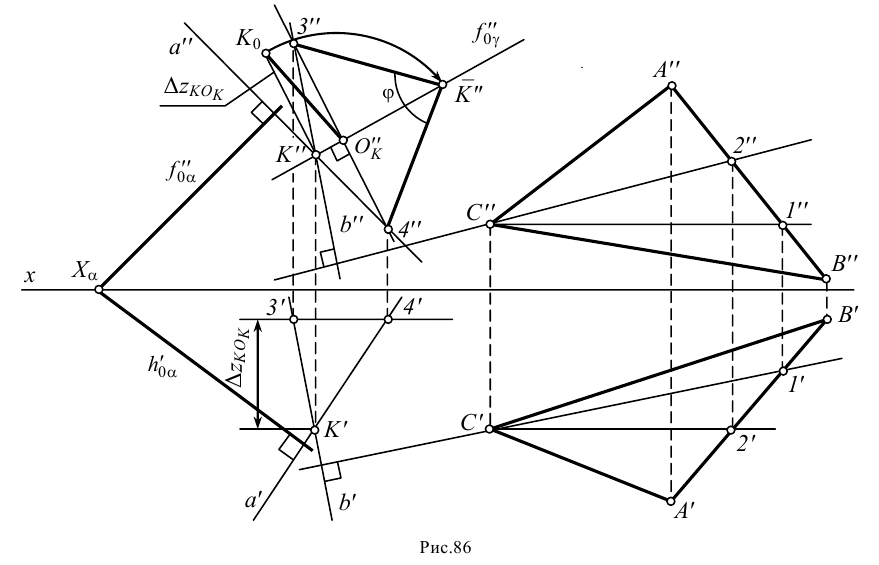
Пример 15. Определить истинную величину угла между двумя пересекающимися плоскостями, одна из которых задана следами ( и
и  ), а другая — треугольником
), а другая — треугольником  (рис.86).
(рис.86).
Угол между плоскостями равен углу между перпендикулярами, опущенными из произвольной точки пространства на данные плоскости.
1. Строим проекции перпендикуляров из произвольно выбранной точки  . Для плоскости
. Для плоскости  проекции перпендикуляров
проекции перпендикуляров  будут перпендикулярны одноименным следам плоскости
будут перпендикулярны одноименным следам плоскости  .
.
Для плоскости, заданной треугольником  , предварительно строим проекции горизонтали
, предварительно строим проекции горизонтали  и фронтали
и фронтали  плоскости треугольника. Горизонтальную проекцию перпендикуляра
плоскости треугольника. Горизонтальную проекцию перпендикуляра  проводим перпендикулярно горизонтальной проекции горизонтали плоскости треугольника
проводим перпендикулярно горизонтальной проекции горизонтали плоскости треугольника  ; фронтальную проекцию перпендикуляра
; фронтальную проекцию перпендикуляра  — перпендикулярно фронтальной проекции фронтали плоскости треугольника
— перпендикулярно фронтальной проекции фронтали плоскости треугольника  .
.
2. Угол между перпендикулярами спроецирован на горизонтальную и фронтальную плоскости проекций с искажением. Для определения истинной величины угла поворачиваем его вокруг фронтали  до положения, параллельного плоскости
до положения, параллельного плоскости  . Через точку
. Через точку  проводим плоскость вращения
проводим плоскость вращения  .
.
Определяем центр вращения точки  .
.
3. Методом прямоугольного треугольника определяем истинную величину радиуса вращения точки  и откладываем эту величину на следе плоскости вращения
и откладываем эту величину на следе плоскости вращения  . Угол
. Угол 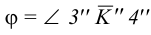 является истинной величиной искомого угла (считается, что угол между двумя плоскостями должен быть меньше
является истинной величиной искомого угла (считается, что угол между двумя плоскостями должен быть меньше  , поэтому, если
, поэтому, если  , то он и является искомым углом между двумя плоскостями; если
, то он и является искомым углом между двумя плоскостями; если  , то искомый угол равен
, то искомый угол равен  ).
).
Вращение плоскости вокруг одного из ее следов (способ совмещения)
Этот способ является частным случаем способа вращения вокруг оси, параллельной плоскости проекций, при котором осью вращения является один из следов плоскости. Цель вращения — совместить заданную плоскость и расположенные в ней геометрические элементы с соответствующей плоскостью проекций. Тем самым можно определить истинные размеры и форму этих элементов. При помощи способа совмещения можно решать и обратные задачи: строить проекции геометрических фигур, лежащих в заданной плоскости, по их истинным размерам и соответствующей точке привязки на плоскости.
Для совмещения плоскости общего положения с плоскостью проекций достаточно совместить с ней одну точку. На рис.87 плоскость  совмещена с горизонтальной плоскостью проекций.
совмещена с горизонтальной плоскостью проекций.
Положение горизонтального следа  , являющегося осью вращения, и точки схода следов
, являющегося осью вращения, и точки схода следов  не изменится. Для определения совмещенного с горизонтальной плоскостью проекций положения фронтального следа
не изменится. Для определения совмещенного с горизонтальной плоскостью проекций положения фронтального следа  выберем на нем произвольную точку
выберем на нем произвольную точку  . Эта точка в процессе вращения будет перемещаться в плоскости
. Эта точка в процессе вращения будет перемещаться в плоскости  , перпендикулярной оси вращения — следу
, перпендикулярной оси вращения — следу  . В пересечении следов
. В пересечении следов  и
и  найдем точку
найдем точку  — горизонтальную проекцию центра вращения точки . Истинную величину
— горизонтальную проекцию центра вращения точки . Истинную величину  радиуса вращения этой точки определяем методом прямоугольного треугольника и откладываем ее на следе . Через точку
радиуса вращения этой точки определяем методом прямоугольного треугольника и откладываем ее на следе . Через точку  и точку схода следов
и точку схода следов  проводим совмещенный с горизонтальной плоскостью проекций фронтальный след плоскости
проводим совмещенный с горизонтальной плоскостью проекций фронтальный след плоскости  .
.
Точка , через которую пройдет след  , может быть найдена также и другим способом — на пересечении дуги радиуса
, может быть найдена также и другим способом — на пересечении дуги радиуса  с горизонтальным следом
с горизонтальным следом  .
.
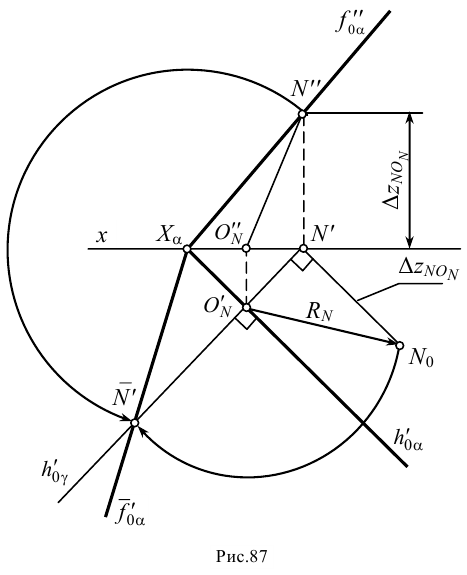
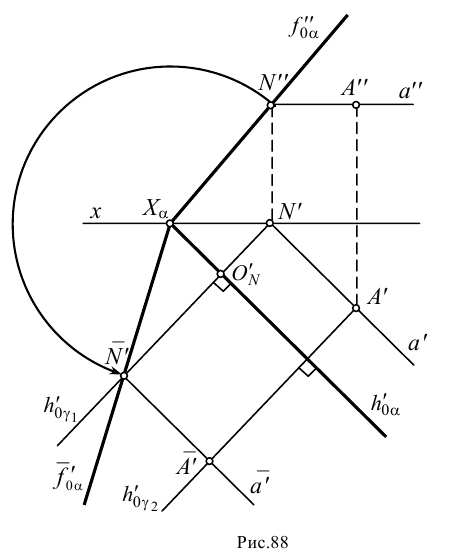
Совмещаем произвольную точку  плоскости
плоскости  с горизонтальной плоскостью проекций (рис.88). Через точку проводим горизонталь
с горизонтальной плоскостью проекций (рис.88). Через точку проводим горизонталь  . Определяем совмещенное с горизонтальной плоскостью проекций положение фронтального следа плоскости
. Определяем совмещенное с горизонтальной плоскостью проекций положение фронтального следа плоскости  . Горизонталь
. Горизонталь  в совмещенном положении будет также параллельна горизонтальному следу плоскости
в совмещенном положении будет также параллельна горизонтальному следу плоскости  . В свою очередь, проекция совмещенного положения точки
. В свою очередь, проекция совмещенного положения точки  (точка
(точка  ) находится в пересечении горизонтали
) находится в пересечении горизонтали  со следом плоскости вращения
со следом плоскости вращения  .
.
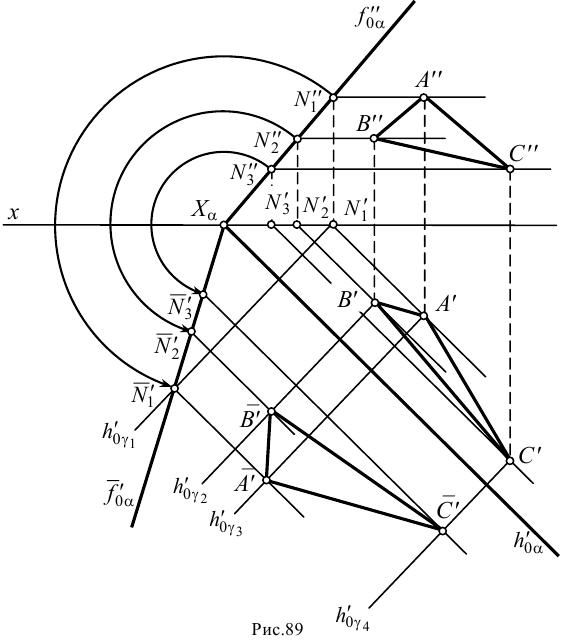
Рассмотрим пример использования способа совмещения при определении истинной величины плоской фигуры, лежащей в плоскости общего положения  (рис.89). Аналогично ранее рассмотренным примерам построим совмещенное с горизонтальной плоскостью проекций положение фронтального следа
(рис.89). Аналогично ранее рассмотренным примерам построим совмещенное с горизонтальной плоскостью проекций положение фронтального следа  плоскости . Затем проводим горизонтали, проходящие через вершины треугольника, сначала — в пространстве, а затем — в совмещенном с плоскостью
плоскости . Затем проводим горизонтали, проходящие через вершины треугольника, сначала — в пространстве, а затем — в совмещенном с плоскостью  положении (горизонтальные проекции горизонталей будут параллельны горизонтальному следу
положении (горизонтальные проекции горизонталей будут параллельны горизонтальному следу  ).
).
Вершины треугольника  ,
,  и
и  находим на пересечении горизонтальных следов плоскостей вращения
находим на пересечении горизонтальных следов плоскостей вращения  ,
,  и
и  проходящих через точки
проходящих через точки  ,
,  и
и  и перпендикулярных горизонтальному следу
и перпендикулярных горизонтальному следу  , с соответствующими горизонталями.
, с соответствующими горизонталями.
Треугольник  есть истинная величина заданного треугольника.
есть истинная величина заданного треугольника.
Метод перемены плоскостей проекций
Суть данного метода заключается в том, что положение проецируемых геометрических элементов в пространстве остается неизменным, а в существующую систему плоскостей проекций вводится одна (или несколько) плоскостей проекций, по отношению к которой тот или иной геометрический элемент будет занимать какое-либо частное положение. Новые проекции точек при введении дополнительных плоскостей проекций обозначают римскими цифрами: например,  — проекция точки
— проекция точки  на дополнительной плоскости
на дополнительной плоскости  ;
;  — проекция точки на дополнительной плоскости
— проекция точки на дополнительной плоскости  и т.д.
и т.д.
Пусть задана точка с проекциями  и
и  в системе плоскостей проекций
в системе плоскостей проекций  и
и  (рис.90). Строим проекции этой точки в новой системе
(рис.90). Строим проекции этой точки в новой системе  , где новая плоскость проекций
, где новая плоскость проекций  также перпендикулярна плоскости . Опустив из точки
также перпендикулярна плоскости . Опустив из точки  перпендикуляр на плоскость , получаем новую проекцию точки
перпендикуляр на плоскость , получаем новую проекцию точки  (точку
(точку  ). Отметим, что расстояние от точки до плоскости в старой и в новой системах одинаковы, т.е.
). Отметим, что расстояние от точки до плоскости в старой и в новой системах одинаковы, т.е.  .
.
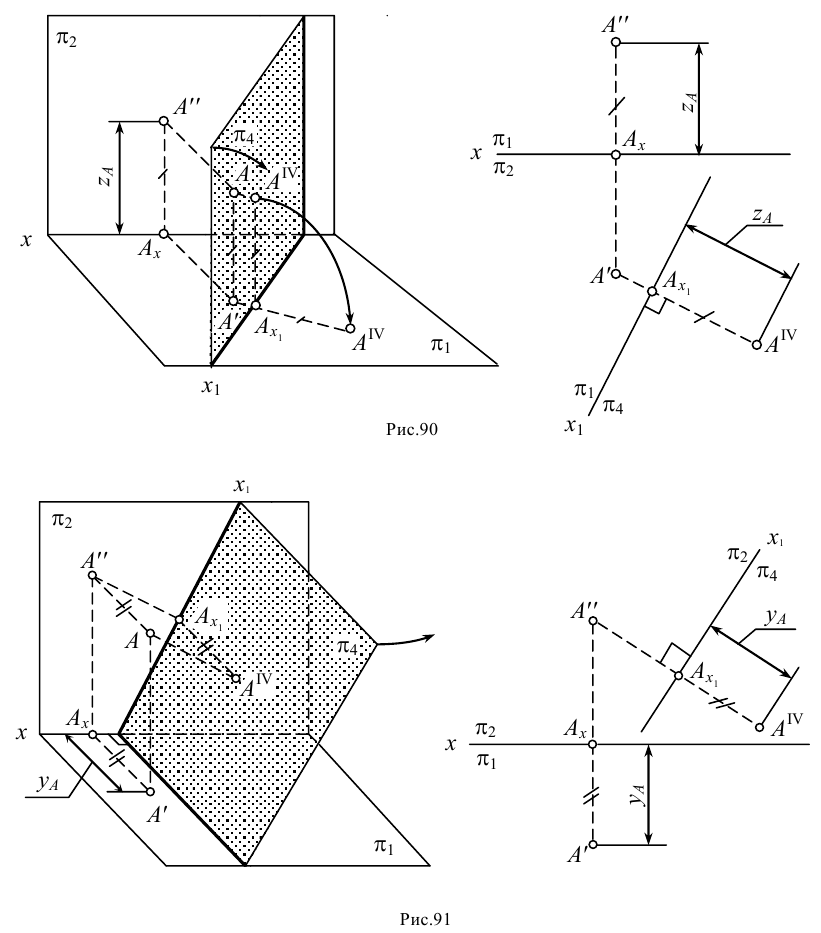
Для получения эпюра (рис.90) плоскость  вращением вокруг оси проекций
вращением вокруг оси проекций  совмещаем с плоскостью
совмещаем с плоскостью  , а затем — с плоскостью чертежа. Оси проекций на эпюре принято дополнительно отмечать в виде дроби, числитель и знаменатель которой — плоскости проекций, пересекающихся по этой оси. Считается, что дробная черта лежит на самой оси, причем обозначения плоскостей ставят со стороны «видимых» проекций (например, ось
, а затем — с плоскостью чертежа. Оси проекций на эпюре принято дополнительно отмечать в виде дроби, числитель и знаменатель которой — плоскости проекций, пересекающихся по этой оси. Считается, что дробная черта лежит на самой оси, причем обозначения плоскостей ставят со стороны «видимых» проекций (например, ось  обозначают
обозначают  ).
).
Для построения проекции  на эпюре достаточно из проекции
на эпюре достаточно из проекции  провести перпендикуляр к новой оси
провести перпендикуляр к новой оси  и от точки
и от точки  отложить расстояние, равное координате
отложить расстояние, равное координате  точки
точки  .
.
Дополнительная плоскость проекций  может быть выбрана и перпендикулярной плоскости
может быть выбрана и перпендикулярной плоскости  (рис.91) Тогда плоскость
(рис.91) Тогда плоскость  вращением вокруг новой оси проекций , совмещаем с
вращением вокруг новой оси проекций , совмещаем с  , которую и принимаем за плоскость чертежа. При этом расстояния от точки
, которую и принимаем за плоскость чертежа. При этом расстояния от точки  до плоскости в предыдущей и в новой системе плоскостей проекций одинаковы, т.е.
до плоскости в предыдущей и в новой системе плоскостей проекций одинаковы, т.е.  .
.
При помощи метода перемены плоскостей проекций значительно упрощается решение задач, связанных с определением расстояний и углов между геометрическим объектами.
Примеры решения задач методом перемены плоскостей проекций
Пример 16. Определить истинную величину отрезка прямой  и угол наклона этой прямой к плоскости
и угол наклона этой прямой к плоскости  (рис.92).
(рис.92).
Для определения истинной величины отрезка  необходимо ввести плоскость проекций
необходимо ввести плоскость проекций  , перпендикулярную одной из имеющихся плоскостей проекций, например плоскости
, перпендикулярную одной из имеющихся плоскостей проекций, например плоскости  и параллельную заданной прямой:
и параллельную заданной прямой:
Выполняем переход от системы плоскостей  к системе
к системе  . На эпюре новая ось проекций
. На эпюре новая ось проекций  будет параллельна горизонтальной проекции отрезка . Вычерчиваем эту ось в любом месте чертежа с условием
будет параллельна горизонтальной проекции отрезка . Вычерчиваем эту ось в любом месте чертежа с условием
Для построения проекций точек  и
и  на плоскости из их горизонтальных проекций проводим линии проекционных связей перпендикулярно оси , на которых откладываем координаты
на плоскости из их горизонтальных проекций проводим линии проекционных связей перпендикулярно оси , на которых откладываем координаты  соответствующих точек:
соответствующих точек:

Истинной величиной отрезка будет отрезок  , а углом наклона прямой к плоскости
, а углом наклона прямой к плоскости  — угол
— угол  между новой проекцией отрезка и осью .
между новой проекцией отрезка и осью .
Пример 17. Определить истинную величину отрезка прямой  и угол наклона этой прямой к плоскости проекций
и угол наклона этой прямой к плоскости проекций  (рис.93).
(рис.93).
Вводим новую плоскость проекций из условия

Строим новую ось
и новые проекции точек и на плоскости . Для этого по линии проекционных связей, проведенных из фронтальных проекций  и
и  перпендикулярно оси
перпендикулярно оси  , откладываем координаты у соответствующих точек.
, откладываем координаты у соответствующих точек.
Истинной величиной отрезка  будет отрезок
будет отрезок  , а углом наклона к плоскости
, а углом наклона к плоскости  — угол
— угол  .
.
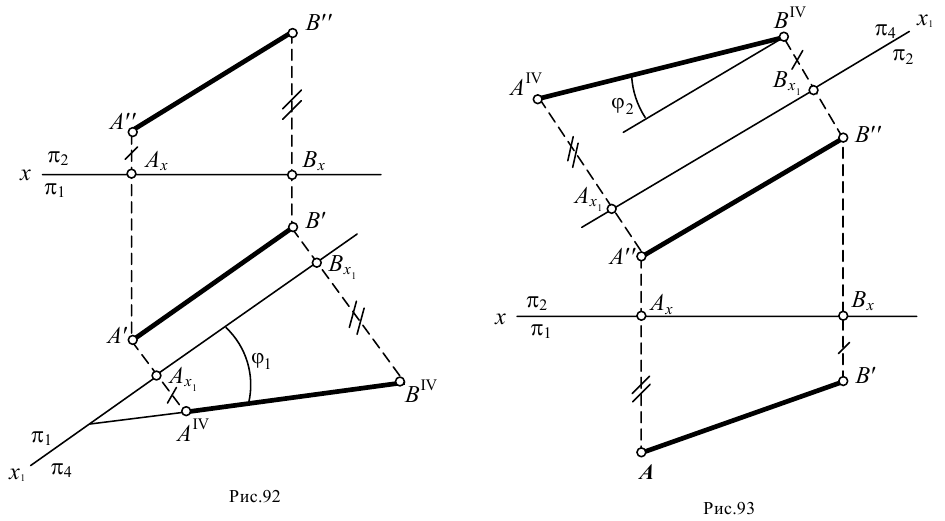
Пример 18. Определить угол наклона плоскости  к плоскости проекций
к плоскости проекций  (рис.94).
(рис.94).
Для определения угла наклона плоскости  к плоскости
к плоскости  необходимо перейти к такой системе проекций, в которой эта плоскость стала бы проецирующей по отношению к вновь вводимой плоскости проекций.
необходимо перейти к такой системе проекций, в которой эта плоскость стала бы проецирующей по отношению к вновь вводимой плоскости проекций.
Введем плоскость проекций  из условия
из условия
Если плоскость является проецирующей по отношению к новой плоскости проекций  , то на эпюре горизонтальный след
, то на эпюре горизонтальный след  должен быть перпендикулярен новой оси проекций
должен быть перпендикулярен новой оси проекций  (ось
(ось  строим в любом месте чертежа, так, чтобы она оказалась перпендикулярной следу ). В пересечении и оси получаем точку схода следов
строим в любом месте чертежа, так, чтобы она оказалась перпендикулярной следу ). В пересечении и оси получаем точку схода следов  .
.
Для построения второго следа плоскости в системе проекций выбираем произвольную точку  , лежащую на фронтальном следе плоскости
, лежащую на фронтальном следе плоскости  , и строим ее проекцию
, и строим ее проекцию  в системе
в системе  .
.
Через точку схода следов  и
и  проводим новый фронтальный след
проводим новый фронтальный след  плоскости . Угол наклона
плоскости . Угол наклона  плоскости к плоскости
плоскости к плоскости  равняется углу между
равняется углу между  и новой осью проекций
и новой осью проекций  .
.
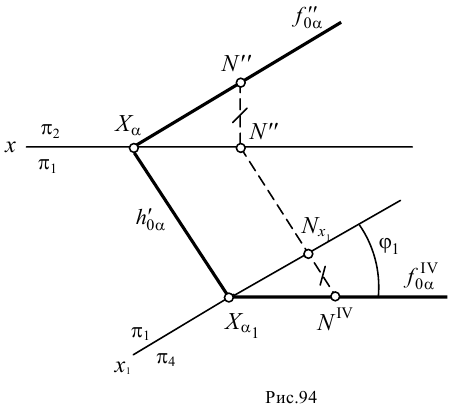
Пример 19. Определить истинную величину расстояния от точки  до плоскости, заданной треугольником
до плоскости, заданной треугольником  (рис.95).
(рис.95).
В плоскости треугольника строим горизонталь 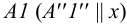 . Переходим от системы проекций
. Переходим от системы проекций  к системе таким образом, чтобы горизонталь
к системе таким образом, чтобы горизонталь  стала перпендикулярна плоскости проекций
стала перпендикулярна плоскости проекций  .
.
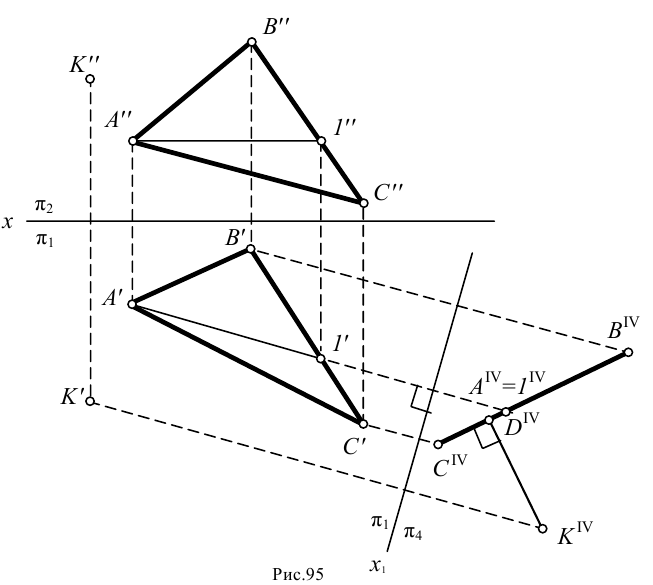
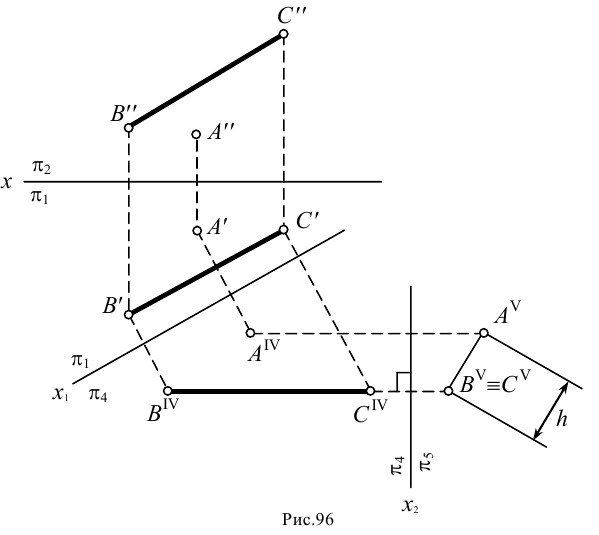
Тогда и плоскость треугольника  будет перпендикулярна вводимой плоскости
будет перпендикулярна вводимой плоскости  .
.
Поскольку плоскость треугольника перпендикулярна  , он спроецируется на эту плоскость в виде отрезка прямой линии
, он спроецируется на эту плоскость в виде отрезка прямой линии  . Построив проекцию точки
. Построив проекцию точки  на плоскости
на плоскости  и опустив из нее перпендикуляр к прямой
и опустив из нее перпендикуляр к прямой  , получим отрезок
, получим отрезок  , равный искомому расстоянию.
, равный искомому расстоянию.
Пример 20. Определить расстояние от точки  до прямой
до прямой  (рис.96).
(рис.96).
Вводим дополнительную плоскость проекций  перпендикулярно
перпендикулярно  так, чтобы она была параллельна прямой
так, чтобы она была параллельна прямой  :
:
Проводим новую ось  параллельно горизонтальной проекции
параллельно горизонтальной проекции  и строим проекции точки
и строим проекции точки  и прямой
и прямой  на плоскости .
на плоскости .
После этого вводим вторую дополнительную плоскость проекций  :
:

На эпюре новая ось  перпендикулярна
перпендикулярна  . Прямая
. Прямая  спроецируется на плоскости в точку
спроецируется на плоскости в точку  . Поэтому расстояние от проекции
. Поэтому расстояние от проекции  до проекции
до проекции  и будет расстоянием
и будет расстоянием  между точкой
между точкой  и прямой
и прямой 
Пример 21. Определить кратчайшее расстояние между скрещивающимися прямыми  и
и  (рис.97).
(рис.97).
Вводим первую дополнительную плоскость проекций таким образом, чтобы эта плоскость была перпендикулярна одной из имеющихся плоскостей проекций и параллельна одной из заданных прямых, например:
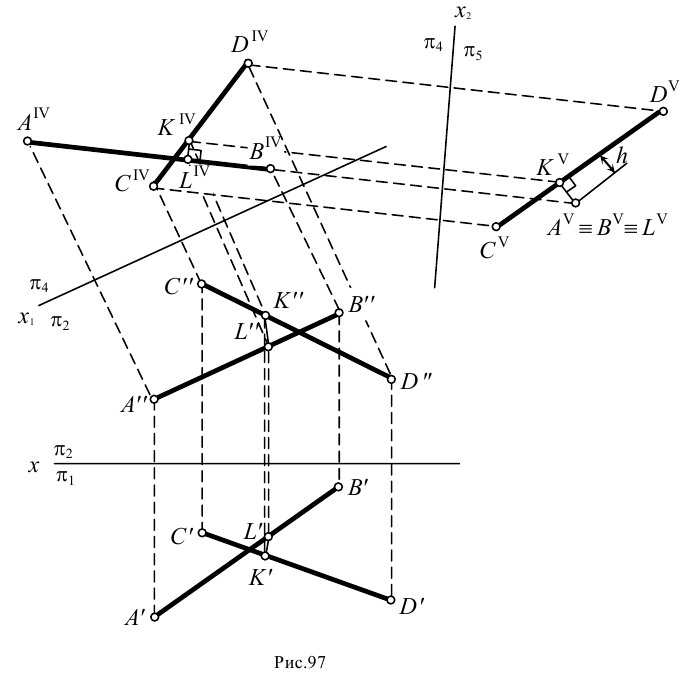
На эпюре вычерчиваем новую ось проекций параллельно фронтальной проекции прямой  :
:
Строим проекции заданных прямых на плоскости  .
.
Вводим вторую дополнительную плоскость проекций  таким образом, чтобы вводимая плоскость была перпендикулярной плоскости
таким образом, чтобы вводимая плоскость была перпендикулярной плоскости  и прямой
и прямой  :
:

На эпюре строим новую ось перпендикулярно проекции  :
:
Строим проекции прямых  и
и  на плоскости
на плоскости  ). При этом прямая спроецируется в точку
). При этом прямая спроецируется в точку  . Перпендикуляр, опущенный из этой точки на отрезок
. Перпендикуляр, опущенный из этой точки на отрезок  , и будет истинной величиной расстояния
, и будет истинной величиной расстояния  между скрещивающимися прямыми и .
между скрещивающимися прямыми и .
Полученное решение можно дополнить построением проекций перпендикуляра  на плоскостях
на плоскостях  ,
,  и
и  . Построения проекций точки
. Построения проекций точки  выполняются обратным ходом:
выполняются обратным ходом:

Чтобы построить проекцию точки  на плоскости
на плоскости  надо из
надо из  опустить перпендикуляр к
опустить перпендикуляр к  и далее
и далее  .
.
Пример 22. Определить истинную величину треугольника  (рис.98).
(рис.98).
Сначала так же, как в примере 19, переходим от системы  к системе
к системе  таким образом, чтобы плоскость треугольника
таким образом, чтобы плоскость треугольника  стала перпендикулярна вводимой плоскости
стала перпендикулярна вводимой плоскости  . Вводим дополнительную плоскость проекций
. Вводим дополнительную плоскость проекций  по следующей схеме:
по следующей схеме:

Для этого в плоскости треугольника проводим горизонталь  и строим новую ось проекций
и строим новую ось проекций  так, чтобы она оказалась перпендикулярной горизонтальной проекции горизонтали:
так, чтобы она оказалась перпендикулярной горизонтальной проекции горизонтали:
Поскольку плоскость треугольника перпендикулярна , он спроецируется на эту плоскость в виде отрезка прямой линии  .
.
Теперь вводим вторую дополнительную плоскость проекций  , перпендикулярную плоскости и параллельную плоскости треугольника :
, перпендикулярную плоскости и параллельную плоскости треугольника :

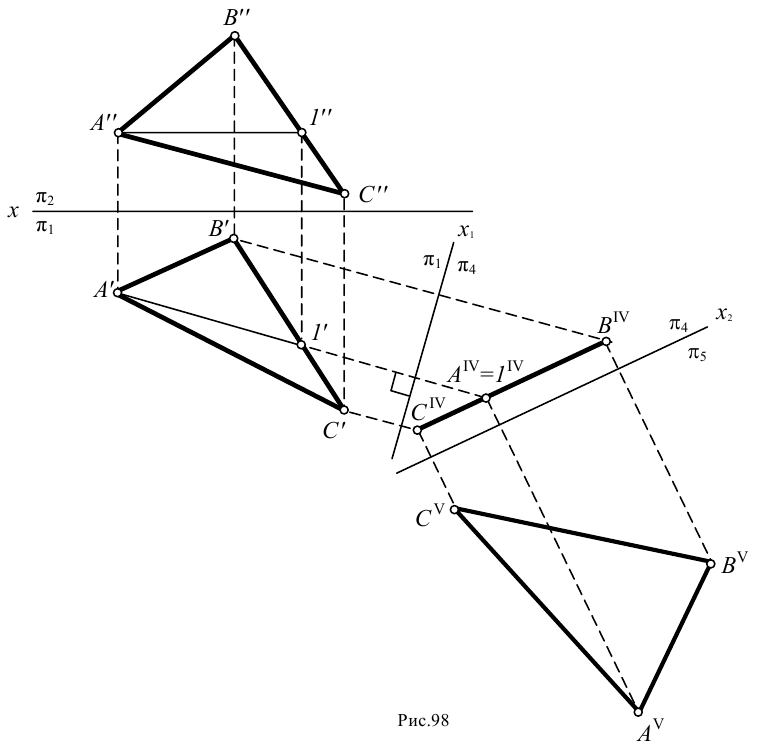
Ось проекций  проводим параллельно
проводим параллельно  . Строим проекции вершин треугольника на плоскости
. Строим проекции вершин треугольника на плоскости  . Поскольку плоскость проекций
. Поскольку плоскость проекций  параллельна плоскости треугольника, на нее треугольник спроецируется без искажения. Треугольник
параллельна плоскости треугольника, на нее треугольник спроецируется без искажения. Треугольник  — истинная величина заданного треугольника.
— истинная величина заданного треугольника.
Пример 23. Определить угол между двумя пересекающимися плоскостями  и
и  (рис.99).
(рис.99).
Угол между пересекающимися плоскостями может быть построен в плоскости, перпендикулярной линии пересечения этих плоскостей. Следовательно, в первую очередь необходимо построить на эпюре проекции линии пересечения плоскостей  и
и  . В нашем случае это прямая
. В нашем случае это прямая  .
.
После этого вводим первую дополнительную плоскость проекций  таким образом, чтобы она была параллельна линии пересечения:
таким образом, чтобы она была параллельна линии пересечения:

На эпюре новая ось  будет параллельна горизонтальной проекции линии пересечения:
будет параллельна горизонтальной проекции линии пересечения:
Далее строим проекции линии пересечения  на плоскости
на плоскости  . Поскольку линия пересечения плоскостей и
. Поскольку линия пересечения плоскостей и  параллельна плоскости проекций , следы этих плоскостей на данной плоскости проекций будут параллельны ей:
параллельна плоскости проекций , следы этих плоскостей на данной плоскости проекций будут параллельны ей:

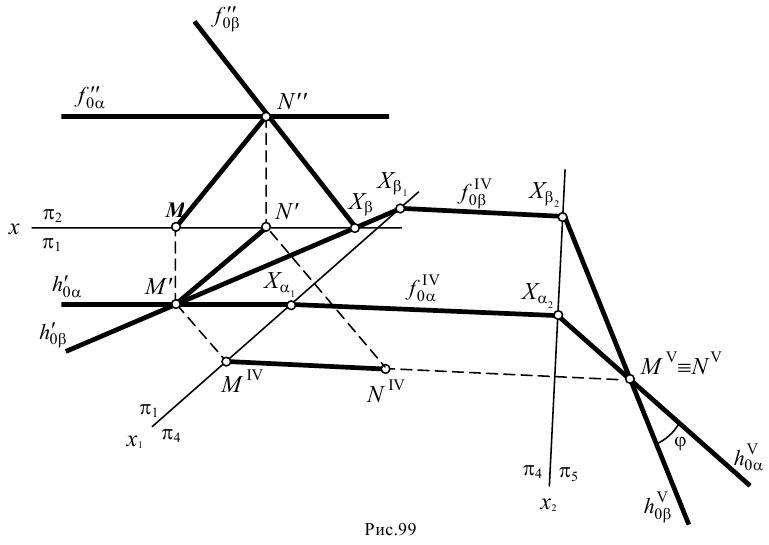
Далее вводим вторую дополнительную плоскость проекций — плоскость  таким образом, чтобы линия пересечения плоскостей
таким образом, чтобы линия пересечения плоскостей  оказалась перпендикулярной вновь вводимой плоскости:
оказалась перпендикулярной вновь вводимой плоскости:

На эпюре строим ось  :
:
В пересечении следов  и
и  с осью получаем точки схода следов соответственно
с осью получаем точки схода следов соответственно  и
и  . Строим проекцию линии пересечения на плоскости
. Строим проекцию линии пересечения на плоскости  . Новые следы
. Новые следы  и
и  плоскостей и пройдут через точки схода следов и и точку
плоскостей и пройдут через точки схода следов и и точку  .
.
В результате проведенных построений плоскости и стали перпендикулярны плоскости проекций  , и угол
, и угол  между следами и и есть искомый угол между плоскостями.
между следами и и есть искомый угол между плоскостями.
- Взаимное положение прямой и плоскости
- Решение метрических задач
- Тени в ортогональных проекциях
- Кривые поверхности
- Кривые линии
- Образование и задание поверхности на чертеже
- Пересечение поверхности плоскостью и прямой
- Развертки поверхностей
Метод вращения вокруг оси
Одним из наиболее эффективных методов определения метрических характеристик плоских фигур является вращение вокруг оси, в качестве которой обычно используют линию уровня или проецирующую прямую.
Содержание
- Способ вращения вокруг проецирующей прямой
- Способ вращения вокруг линии уровня
Способ вращения вокруг проецирующей прямой
Перемещение точки при её вращении вокруг проецирующей прямой является частным случаем параллельного перемещения и подчиняется следующим правилам.
- Траектория движения точки – дуга окружности с центром, расположенным на оси вращения. Радиус окружности равен расстоянию между точкой и осью вращения.
- При вращении точки вокруг прямой, перпендикулярной фронтальной плоскости проекции, фронтальная проекция точки перемещается по дуге окружности, а горизонтальная – параллельно оси X.
- При вращении точки вокруг прямой, перпендикулярной горизонтальной плоскости проекции, горизонтальная проекция точки перемещается по дуге окружности, а фронтальная – параллельно оси X.
Руководствуясь рассмотренными правилами, повернем отрезок CD в положение, параллельное фронтальной плоскости проекции. В качестве оси вращения i будем использовать горизонтально проецирующую прямую, проведенную через точку D.

При повороте отрезка положение точки D не изменится, поскольку она лежит на оси i. Точку C’ переместим по дуге окружности радиусом C’D’ в положение C’1 так, чтобы выполнялось условие C’1D’1 || X. Для нахождения точки C»1 из C» проведем прямую, параллельную оси X, до пересечения её с линией связи, восстановленной из т. C’1.
На следующем рисунке показан способ перевода отрезка в горизонтально проецирующее положение. Построения выполнены в два этапа и описаны ниже.

Сначала вращением вокруг оси i1 CD перемещают в положение C1D1, параллельное фронтальной плоскости проекции. После этого вращением вокруг оси i2 отрезок переводится в искомое положение C2D2, где он перпендикулярен горизонтальной плоскости проекции.
Расположение осей вращения выбирают исходя из удобства дальнейших построений. В нашей задаче горизонтально проецирующая прямая i1 проходит через точку D, а проекция i»2 фронтально проецирующей прямой i2 лежит на продолжении отрезка C»1D»1.
Способ вращения вокруг линии уровня
Действенным и наиболее рациональным приемом решения задач, в которых требуется определить натуральную величину угла, является способ вращения вокруг линии уровня.
Основные правила построения
- Радиус вращения точки равен расстоянию между точкой и линией уровня, выполняющей роль оси. Натуральную величину радиуса определяют методом прямоугольного треугольника.
- При вращении вокруг горизонтали h точка перемещается по окружности, которая проецируется на горизонтальную плоскость в отрезок прямой, перпендикулярный горизонтальной проекции горизонтали h’. На фронтальную плоскость окружность, по которой движется точка, проецируется в эллипс. Строить его нет необходимости.
- При вращении вокруг фронтали f точка перемещается по окружности, которая проецируется на фронтальную плоскость в отрезок прямой, перпендикулярный фронтальной проекции фронтали f». Вместе с тем горизонтальная проекция линии перемещения представляет собой эллипс, строить который не обязательно.
Рассмотрим, как определить действительную величину угла между прямыми a и b, пересекающимися в точке A. Построения представлены на рисунке и выполнены согласно алгоритму, который описан ниже.

Алгоритм решения
- Проводим фронтальную проекцию h» горизонтали h. Она пересекает прямые a» и b» в точках 1» и 2». Определяем горизонтальные проекции 1′ и 2′ и через них проводим h’.
- Находим центр вращения O. Его горизонтальная проекция O’ лежит на пересечении прямой h’ с перпендикуляром, проведенным из A’ к h’.
- Определяем натуральную величину радиуса вращения R = O’A’0. Для этого строим прямоугольный треугольник O’A’A’0, катет которого A’A’0 равен расстоянию от A» до h».
- Проводим дугу окружности радиусом R до пересечения её с прямой O’A’ в точке A’1. Соединяем A’1 с точками 1′ и 2′. Искомый угол ϕ построен.
-

BINARIUM
Самый лучший и надежный брокер бинарных опционов! Огромный раздел по обучению. Идеально для начинающих трейдеров! Бесплатный демо-счет и денежный бонус за регистрацию:
Регистрация
-
☆☆☆☆☆
★★★★★
EVOTRADE
Бонусы для новых трейдеров до 5000$, сигналы, стратегии и быстрый вывод заработанных денег!
Регистрация


Что такое Точки пивот – как их построить, индикаторы и стратегии
Точки Пивот (Pivot Points) — точки разворота цены на графике. Как их вычислить и построить, индикаторы точек Пивот и основные стратегии торговли.
Точки Пивот (Pivot Points) – по истине легендарный инструмент для анализа ценовых значений. Немалую долю популярности этому термину дал Джесси Ливермор, неоднократно рекомендовавший использовать точки разворота в торговле. В текущей статье мы обратим внимание на то, что из себя представляют точки разворота, как ими пользоваться и использовать в трейдинге.
Что такое точки Пивот
Точки Пивот (с англ. «Pivot» дословно переводится, как «опора», «точка вращения») — это уровень цены, когда она с наибольшей вероятностью развернётся. Ещё много десятилетий назад спекулянты использовали специальные формулы, позволяющие примерно оценить ценовой диапазон и уровни (точки), от которых цена может отталкиваться. На практике это выглядит следующим образом:
Как видите, это практически идеальная точка разворота цены, где можно было войти с минимальным риском и заработать с соотношением 1 к 10 и больше. Естественно, такие уровни работают далеко не всегда, часто случаются ложные сигналы, но они вполне могут служить ориентиром для внутридневной торговли.
Как работают точки разворота
Чтобы понять механизм работы разворотных точек, достаточно понять, как они рассчитываются, какие значения включаются в формулу. Тем не менее, и здесь есть небольшой подвох, ведь существует довольно много вариаций расчёта разворотных точек. Перед тем, как перейти к формулам, перечислим кратко некоторые разновидности подсчётов Pivot Points:
- Традиционный (Traditional) — простой способ, применяемый на Wall Street многие десятки лет.
- Классический (Classic) — практически аналогичен предыдущему варианту, есть лишь небольшие отличия в формуле.
- Вуди (Woodie) — придают большое значение цене закрытия предыдущего дня.
- ДеМарк (DeMark) — разработаны известным аналитиком из хедж-фонда SAC Capital Advisors, предсказавшего пики и впадины рынка в 2011-13 годах.
- Фибоначчи (Fibonacci) — связаны с уровнями коррекции цен по числам легендарного математика.
- Камарилла (Camarilla) — ещё один нетрадиционный вариант подсчёта с небольшим отличием от классики.
Отдельно стоит отметить особенности подсчётов в наиболее популярных вариациях.
Традиционная формула
Как уже отмечалось, это самый простой вариант подсчёта. Достаточно сложить максимум предыдущего дня (High), минимум (Low) и цену закрытия (Close), после чего всё поделить на три. В итоге, имеем формулу следующего вида:
P = (High + Low + Close)/3
Дополнительно в вычислениях используют уровни поддержки (S) и сопротивления (R):
-
BINARIUM
Самый лучший и надежный брокер бинарных опционов! Огромный раздел по обучению. Идеально для начинающих трейдеров! Бесплатный демо-счет и денежный бонус за регистрацию:
Регистрация
-
☆☆☆☆☆
★★★★★
EVOTRADE
Бонусы для новых трейдеров до 5000$, сигналы, стратегии и быстрый вывод заработанных денег!
Регистрация
- R1 = 2Pivot — Low;
- S1 = 2Pivot — High;
- R2 = Pivot + (R1 — S1);
- S2 = Pivot — (R1 — S1);
- R3 = High + 2 × (Pivot — Low);
- S3 = Low — 2 × (High — Pivot).
Считать вручную все эти значения не имеет смысла, сегодня есть довольно много сервисов и индикаторов, предоставляющих всю информацию в готовом виде. К примеру, на Investing.com в разделе «Точки разворота»:
Кроме того, аналогичные точки разворота можно сразу построить на живом графике:
Здесь же существует обильное количество решений с построением точек Пивот, есть все вышеуказанные вариации (Woodie, DeMark, Camarilla и т.д.).
Формула ДеМарка
Данные уровни от известного аналитика скорее предназначены для анализа текущего тренда и диапазона, они не настолько точно определяют критические точки. Особенности расчёта следующие:
- для Close Open будет Pivot = 2 × High + Low + Close;
- для Close = Open будет Pivot = High + Low + 2 × Close;
- S1 = Pivot / 2 – Low;
- R1 = Pivot / 2 + High.
Как видите, в условиях к формуле появилась новая переменная открытия дня (Open).
Формула Woodie
Такой вид подсчёта схож с традиционным вариантом, но даёт больший вес ценам закрытия предыдущего дня. Сами формулы выглядят следующим образом:
- Pivot = (High + Low + 2 × Close) / 4;
- S1 = 2 × Pivot – High;
- S2 = Pivot − High + Low;
- R1 = 2 × Pivot – Low;
- R2 = Pivot + High – Low.
Закрытие (Close) умножается на два, что и придаёт ему гораздо больший вес в формуле.
Формула Camarilla
Ещё один набор уровней, который включает в себя 8 ценовых значений от R4 до S4. По общему правилу их используют для выставления стоп-ордеров и фиксации прибыли. Формулы выглядят немного иначе:
- S1 = Close − (High − Low) × 1,1 / 12;
- S2 = Close − (High − Low) × 1,1 / 6;
- S3 = Close − (High − Low) × 1,1 / 4;
- S4 = Close − (High − Low) × 1,1 / 2;
- R1 = (High − Low) × 1,1 / 12 + Close;
- R2 = (High − Low) × 1,1 / 6 + Close;
- R3 = (High − Low) × 1,1 / 4 + Close;
- R4 = (High − Low) × 1,1 / 2 + Close.
В этом случае в подсчёты включены интересные коэфициенты (1,1 и деление на 2, 4, 6, 12).
Важное замечание: cуществует довольно много отличающихся формул по выявлению разворотных уровней. Все они ориентированы на максимумы и минимумы предыдущего дня, а также на цены закрытия. Какие из них использовать в работе каждый решает самостоятельно, ведь на разных инструментах и рынках могут хорошо заходить различные подсчёты. Трейдеру вовсе необязательно понимать все эти формулы и вручную считать точки, сегодня предостаточно сервисов для автоматического подсчёта (Tradingview, Investing.com). Это как минимум избавит от рутинной работы.
Как правильно использовать точки Пивот в торговле на Форекс
Перейдём к практическому применению точек Пивот. На Forex их используют довольно часто, но возникает немало проблем:
- С различием времени закрытия разных торговых сессий, поскольку это межбанковский рынок, а не биржевой. Он работает 24 часа в сутки. Многие трейдеры используют значения, согласно их терминалу, например, когда закрывается дневная свеча, другие предпочитают использовать время закрытия по Нью-Йорку (0 часов по МСК). В действительности это не играет большой роли, достаточно придерживаться стандартного варианта в автоматическом подсчёте.
- С различием видов Пивот точек, какие из них эффективнее и лучше в применении. Данный вопрос решается полностью индивидуально, но наш опыт показывает, что лучше всего работает традиционный вариант подсчёта.
Рассмотрим несколько примеров, как использовать точки Пивот.
Вышеуказанный график отображет уровни Пивот по традиционной формуле на валютной паре USDCAD. 15 марта 2020 канадец довольно чётко тестировал Pivot, потенциальный ход был до S1. Расчёт ведётся с начала дня с 0 часов по терминалу, где установлено московское время, что также совпадает с закрытием Нью-Йорка.
При торговле на Forex важно также учитывать:
- Среднюю волатильность в течение дня, для чего оценивать показатели
- Направление глобального и локального тренда.
- Потеницальные новости в течение дня, которые могут изменить волатильность.
Учитывая вышеперечисленные нюансы, трейдер будет использовать точки Пивот на Forex правильно.
Стратегии торговли по точкам Пивот
Пожалуй, самым важным аспектом являются не столько правила построения уровней, сколько стратегии точек Пивот. Именно благодаря грамотно спланированному торговому плану на разворотных точках можно заработать, ведь никакой индикатор не даёт 100%-ного сигнала на вход в сделку, мы имеем дело лишь с потенциальной вероятностью.
Стратеги точек Пивот на пробой уровня
Можно до бесконечности перечислять схожие стратегии с разворотными точками, но все они так или иначе сводятся к тому, будет ли уровень пробит, или нет. Для торговли пробоев важно учитывать:
- наличие импульса;
- сопутствующий тренд;
- подтверждение входа;
- повышение объёмов;
- грамотное соотношение стоп-лосса и тейк-профита.
В качестве примера возьмём ситуацию по AUDUSD:
На графике видно, что уровень Pivot уже тестировался в течение дня, но не был пробит. Направление локального тренда явно в шорт. Растут объёмы и две свечи медвежьих закрываются ниже уровня — это и есть сигнал для входа на пробой уровня. Стоп мы ставим за high свечи пробоя, а тейк на уровень S1. Соотношение риска к профиту примерно 1 к 2.
Стратегия по Пивот на отбой от уровня и ложные пробои
Довольно часто цена тестирует точки Пивот, отталкивается от них, обычно это происходит также с ложным пробоем, т.е. небольшим заскоком за уровень. Такая ситуация позволяет получить довольно выгодный вход с отличным соотношением потенциальной прибыли и риска. Необходимо учесть:
- направление тренда — можно работать как по тренду, так и против, если цена прошла больше 80% от ATR (своей средней волатильности в течение дня);
- подтверждение сигнала закрытием выше уровня;
- хорошее соотношение риска к прибыли.
В качестве примера рассмотрим ситуацию по USDCAD:
На графике мы видим, что цена пробила уровень S1, но свеча в итоге закрылась выше уровня, затем следующая бычья свеча подтвердила наш вход. Стоп-ордер ставится за ложный ложный пробой (хвост свечи), а тейк-профит перед уровнем Pivot. Соотношение риск-прибыль практически 1 к 5.
В сообществе трейдеров принято выделять сотни разных стратегий с Pivot-уровнями, но в действительности все они лишь разновидности пробоев или отбоев от уровня. Добавляются различные фильтры в виде скользящих средних или осцилляторов, но суть остаётся одной.
Индикаторы точек Пивот
Довольно удобно торговать, когда не требуется переходить из одного окна в другое для проверки уровней, а также не строя их вручную в терминале. Это позволяют сделать индикаторы в MetaTrader, которые ничем не отличаются от сервисов, упомянутых ранее, ведь значения у Pivot Points строго определены математическими формулами. Вариантов индикаторов довольно много, рассмотрим наиболее популярные из них.
Pivot Points Indicator
Пожалуй, самый удачный индикатор точек Пивот. Он позволяет рассчитывать уровни по пяти видам формул (Традиционной, Woodie, Camarilla, Фибоначчи, ДеМарку).
Индикатор выглядит на графике со стандартными настройками довольно приятно, не режет глаз, уровни видно чётко. Получается своеобразный аналог построению уровней на Tradingview, но только сразу в терминале. Очень удобно.
Pivot Points от SwingTree
Этот индикатор строит только один вид уровней, они больше похожи на формулу Woodie.
Выглядит не совсем удобно, поскольку линии изображены пунктиром, при изменении настроек они сбрасываются, поэтому изменить это можно только через воздействие на исходный код индикатора. Тем не менее, уровни довольно точные и дают хорошие сигналы, поэтому рекомендовать разработку от SwingTree однозначно можно.
Pivot от Poul Trade Forum
Ещё один часто встречающийся индикатор, который отличается довольно интересным дизайном с соединением всех уровней Пивот воедино. На практике это выглядит следующим образом.
Индикатор внушительно показывает текущий диапазон движения цены, ближайшие уровни поддержки и сопротивления. Это позволяет довольно грамотно подбирать точки входа, видеть направление тренда. Метод подсчёта, к сожалению, только один.
Заключение
Точки Пивот — это отличный инструмент в арсенале трейдера, позволяющий определять с точностью до пунктов ближайшие разворотные уровни. Существует много вариантов подсчёта точек разворота: Традиционный, Woodie, Фибоначчи, ДеМарк, Camarilla и т.д. Все они связаны с ценовыми значениями закрытия дня, максимума и минимума, а в некоторых случаях учитывают и открытие дня.
Считать точки самостоятельно нет необходимости, поскольку сегодня доступен автоматический рассчёт, как в отдельных сервисах, так и с помощью индикаторов прямо в терминале. Различий в подсчётах не будет, поскольку точки Пивот строго определены математической формулой и не носят субъективного характера.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Трейдинг: Стратегия торговли, основанная на Анализе Точек Вращения (Pivot Points)
Анализ Точек Вращения (Pivot Points, PP) — одна из самых простых и эффективных стратегий для рынков с высокой степенью внутридневной волатильности. Она применялась еще в докомпьютерную эпоху, когда трейдеры, работающие на бирже, не имели возможности применять какую-либо вычислительную технику, кроме бухгалтерских счетов и арифмометров.
Анализ Точек Вращения (Pivot Points, PP) — одна из самых простых и эффективных стратегий для рынков с высокой степенью внутридневной волатильности. Она применялась еще в докомпьютерную эпоху, когда трейдеры, работающие на бирже, не имели возможности применять какую-либо вычислительную технику, кроме бухгалтерских счетов и арифмометров. Описание данного анализа часто встречается в целом ряде статей по техническому анализу в главах, посвященных историческим экскурсам. Основным преимуществом метода является простота вычисления, позволяющая проделывать расчеты в уме или на клочке бумаги.
Поскольку при вычислениях используются четыре арифметических действия, то у каждого трейдера, применявшего эту методику, всегда присутствовало желание, если не обогнать, так хотя бы пересчитать конкурентов. Соответственно, формул расчета точки вращения и уровней поддержки/сопротивления появилось великое множество (смотри примеры в таблицах).
Опорные точки
Опорные точки — это точки, которые позволяют вычислить на графике рынка форекс критические уровни поддержки или сопротивления. Уже очень много лет многие трейдеры используют эти точки в анализе рынка форекс. Опорные точки набрали большую популярность, и они могут дать много информации и быть полезными для любого трейдера. Точки помогут определить правильное решение, которое может принести значительную прибыль. Здесь мы будем учиться рассчитывать эти точки по несложным формулам и применять в реальной жизни. Помните, что если применять опорные точки с другими полезными индикаторами, то может получиться идеальная торговая стратегия, которая поможет вам получить прибыль с рынка. Рассмотрим изначально теорию и формулы, а потом перейдем прямиком к практике.
Расчет опорной точки
Если говорить простым языком, то опорная точка — это обычная точка вращения. Вычисляю такую точку с помощью уровней цен. Используют чаще всего предыдущий минимум, максимум и цену закрытия. Чаще всего эти цены берут по дневным графикам. Но при этом опорная точка может быть высчитана по информации часовых графиков. Многие трейдеры рассчитывают опорную точку по дневным графика и потом применяют всю информацию уже к внутридневным графикам, то есть к часовому графику, к получасовому графику и к 15-ти минутному.
Классические расчеты опорной точки
Сейчас научимся рассчитывать опорную точку по классическим расчетам. Ее будет очень просто вычислить самостоятельно. Рассчитать центральную опорную точку можно по формуле (P) = (High + Low + Close). Здесь «Р» будет центральной опорной точкой, а прибавляться будет минимальная цена, максимальная и цена закрытия.
Расчеты сопротивления и поддержки
После этого нужно будет уметь высчитывать уровни поддержки и сопротивления. Для этого тоже будут свои формулы, которые очень просто применяются в жизни. Первое сопротивление будет высчитываться по формуле (R1) = (2*P) – Low. Понятно, что тут берется результат центральной опорной точки, умножается на два и отнимается низкое значение цены. Нужно также уметь высчитывать значение первой поддержки. Можно использовать формулу (S1) = (2*P) – High. Тут также берется значение центральной опорной точки, умножается на два и только потом отнимается значение высокой цены.
Теперь рассмотрим, как же можно самостоятельно вычислить второй уровень поддержки и сопротивления. Второй сопротивление будет высчитываться по формуле (R2) = P + (R1-S1). Здесь нужно будет взять значение опорной точки и прибавить к разнице первого сопротивления и первой поддержки. Все обозначено аналогичными буквами, так что можно с легкостью понять эту формулу. Вторая поддержка также очень проста по вычислению. Для нее действует формула (S2) = P — (R1- S1). Здесь нужно будет от значения центральной опорной точки отнять разницу первого сопротивления и первой поддержки.
Стратегии торговли по опорным точкам
Существует множество стратегий торговли по опорным точкам. Для начала разберем очень простую и доступную стратегию торговли. Если начальная цена была ниже центральной опорной точки очень большой период времени, а потом прорвала опору и образовала разворотную свечу, то можно с очень хорошей вероятностью продавать. Это не случайно, ведь движение цены было ниже опорной точки, и это движение потом возобновится с очень большой вероятностью.
Анализ благодаря опорной точке
Часто опорные точки используют для анализа долгосрочных проекций. Используют при этом опорные точки годовых графиков, месячных графиков и недельных графиков. Тогда вам для этих вычислений потребуется максимум, минимум и цена закрытия прошлого года, месяца или же недели. Обычно рассматривают недельную опорную точку для краткосрочного тренда. Годовую опорную точку используют для долгосрочного тренда. А вот месячную опорную точку берут для среднесрочного тренда. Все это будет очень полезно, особенно для фьючерских контрактов рынка форекс. Например, если вы знаете, что находитесь уже ниже недельной, месячной ли годовой опорной точки, то тогда вы можете быть уверенны, что сейчас вы в сильном нисходящем тренде. Исходя из этой информации, вы сможете принять нужно решение и действовать, например, начать наращивать позицию. Те же нюансы будут действовать и в работе в длинной позиции.
Применение опорных точек на практике
Теперь нужно наглядно увидеть, как работают опорные точки на практике. Для этого нужно посмотреть на рисунок с графиком. На нем красная линия будет обозначать уровни сопротивления, синяя линия покажет нам уровни поддержки, желтая линия означает середину между основными уровнями и наконец-то зеленая линия и будет нашей опорной точкой.
На графике можно наглядно увидеть, как центральная опорная линия служит большой поддержкой во время части европейской сессии. Но вот уже на американской сессии быки становятся сильнее и начинают тестировать срединные линии и уровни. Они сразу же обведены в кружочки. Во время торговли мы можем видеть, что применяя опорные точки волотильность в течение всей сессии очень часто идет между опорной линией и первыми уровнями поддержки с сопротивлением.
Опорные точки в MetaTrader
! У вас уже должен быть установлен MetaTrader вашего брокера.
Для того, чтобы установить Индикатор PivotCustomTime (Опорные точки), перейдите в окно Навигатора внутри вашего MetaTrader (сочетание клавиш Cntr+N), выберите в «Пользовательские индикаторы» последний пункт (у меня получилось «1929 еще. «). В терминале появится список с Индикаторами в алфавитном порядке. Выберите PivotCustomTime, нажмите правой клавишей и выберите пункт «Загрузить» (клавиша D). Теперь у вас отобразиться в «Пользовательских индикаторах» PivotCustomTime. При клике на него 2 раза левой мышкой, вы можете настроить цвета и оформление линий, и линии с опорными точками автоматически построятся на вашем графике.
Теперь вы знаете, что такое опорные точки на рынке форекс и как их можно использовать. Если знать нюансы этих опорных точек, то можно очень прибыльно торговать и почти не рисковать. Не забывайте обращать внимание на формулы, которые были приведены выше. Они очень просты и доступны и если их использовать в расчетах, то можно получить дополнительную информацию по графику. Также теперь вы знаете самую простую стратегию торговли по опорным точкам. Попробуйте применить ее и усовершенствовать под свой стиль. Можно на этой простой стратегии получить новые навыки и выучить более сложные способы торговли по опорным точкам. Также теперь вы умеете анализировать графики, благодаря опорным точкам. Обратите внимание, что перед тем, как использовать знания про опорные точки в реальной жизни, лучше всего потренироваться на демо счетах различных брокеров. Потренируйтесь на таких примерах и переходите на реальную торговлю на бирже форекс.
Точки разворота
Точки разворота широко применяются трейдерами всего мира, так как они очень просты и эффективны в применении, когда трейдер составляет свою торговую стратегию. Именно точки разворота составляют основу практически любого технического анализа и позволяют определить важные уровни поддержки и сопротивления.
Это полезно знать (финансовый ликбез)
Точка разворота — это та точка, та особая линия на графике, где бычье настроение приходит на смену медвежьему. Она поможет определить будущую ценовую динамику и возможный диапазон ценового изменения. Данный инструмент используется не только трейдерами, но и различным финансовыми институтами, а также банками, так как это индикаторы сильного и слабого состояния рынка.
Использование точек вращения
Особенно полезно использовать Pivot Points трейдерам, отдающим предпочтение торговле на небольших временных промежутках или внутридневной торговле, то есть тем, кто играет на относительно небольших изменениях цены. Они помогут и трейдерам, определяющим точку разворота, и трейдерам, стремящимся определить ключевые уровни, чтобы впоследствии их пробить для классификации конкретного движения цены в качестве пробоя.
Например, если точка вращения в следующем периоде торговли окажется ниже рынка, то это направление следует оценивать как бычье настроение рынка. Если же точка вращения окажется выше рынка, то это говорит о медвежьем рыночном настроении.
Точка вращения рассчитывается как среднее значение от цен: минимальной и максимальной, за предыдущий период торговли, открытия и закрытия. Впрочем, можно выделить несколько вариантов расчета, а также классический способ, в основе которого лежит следующая формула:
Точка разворота рынка = (Максимум + Минимум + Цена закрытия) / 3
Следующую точку вращения можно рассчитать при помощи четырехчасового графика, то есть подставить его показатели в упомянутую формулу, что позволит получить две точки вращения для одной сессии (или шесть точек разворота для одного дня торгов).
Расчет Pivot Points
Кроме того, уровни сопротивления и поддержки рассчитываются по специальным формулам, которые также способны найти и определить закономерность ценового движения, хоть иногда и с переменным успехом. Речь идет о следующих формулах расчета Pivot Points (PP), уровней поддержки (Sup) и сопротивления (Res):
PP = (High + Low + Close + Close) / 4
Res1 = 2 × PP — Low , Sup1 = 2 × PP — High
Res2 = PP + (High — Low), Sup2 = PP — (High — Low)
Res3 = Res1 + (High — Low), Sup3 = Sup1 — (High — Low)
Этот расчет предполагает применение максимума (High), минимума (Low), а также закрытия цены (Close) предшествующего дня торгов. Именно эти данные позволят определить точку разворота, а также три уровня сопротивления и поддержки на следующий торговый день. Фактически, можно сказать, что в математическом понимании точка вращения представляет собой нечто наподобие средневзвешенного значения предшествующего дня. Результаты исчисления, произведенных вышеприведенными формулами, практически аналогичны. В зависимости от конкретной торговой системы, расчеты могут производиться не только для текущего рабочего дня, но и для текущей сессии, недели и т. д.
Использование Pivot Points — это прекрасная возможность систематизировать бесконечное движение рынка, трезво оценивая рисковую готовность каждого конкретного финансового центра и взаимодействуя этой информацией с другими аналитическими материалами.
Зачастую приверженцы Pivot Points берут данные о точках разворота не из вычислений, а из новостной ленты Dow Jones. Из этих же сообщений можно почерпнуть информацию и об основных линиях сопротивления и поддержки.
Разворотная точка
Разворотная точка (стержневая, опорная точка, точка вращения, англ. Pivot Point) – индикатор технического анализа, который рассчитывается как среднее арифметическое котировок C, L и H (см. рис. 1).
Описание индикатора
Pivot Point является уровнем, от которого происходит отталкивание валюты для выбора дальнейшего направления движения. Выделяют 3 уровня сопротивления и 3 уровня поддержки, однако в некоторых индикаторах, причисляемых к «нестандартным», можно определить и большее их количество.
Уровни поддержки/сопротивления высчитываются из цен открытия/закрытия, а также цен максимума/минимума за прошедший период торгов. Как отмечают некоторые биржевые спекулянты, наиболее сильные колебания цен наблюдаются именно в районе разворотной точки.
Валютный рынок Форекс работает круглосуточно, поэтому большинство трейдеров время закрытия берут ровно в 4:00 по Нью-Йорку.
(Рис. 1 – Технический индикатор Pivot Point)
Пример трейдинга по разворотной точке
К началу открытия валютного рынка цена колебалась в границах Pivot Point и остановилась ниже этого уровня. Получив подтверждение других индикаторов, трейдер открывает позицию SELL, а затем часть позиции закрывает на первом уровне. Когда цена дошла до указанного уровня, игрок закрывает часть позиции и ждет отработки следующего уровня. Однако ее не происходит и торговая позиция трейдера кроется по первому поворотному уровню, куда он отодвинул свой стоп. Таким образом, можно описать примерную стратегию работы по Pivot Point.
Аналитический Pivot Point
Некоторое число профессиональных трейдеров, использующих разворотную точку в своей торговле, тем не менее, не применяют его для вычисления программ и индикаторов, объясняя это тем, что данный метод имеет ряд недостатков. Такие игроки предпочитаю пользоваться аналитическим Pivot Point, предоставляемым каждый день Рудольфом Акселем в своем обзоре.
Следует отметить, что Р. Аксель в обзоре дает не только разворотный уровень Pivot Point, но и второстепенные уровни сопротивления/поддержки.
Сигналы индикатора «разворотная точка»:
- Пробитие ценой первого уровня поддержки и последующее движение ее вниз указывает на сильный медвежий рынок;
- Пробитие ценой первого уровня сопротивления и последующее ее движение вверх свидетельствует о сильном бычьем рынке;
- Колебание цены между разворотной точкой и первыми уровнями сопротивления/поддержки указывает на ожидание важных новостей;
- При пробитии ценой первой линии сопротивления или поддержки и движение ее ко вторым линиям говорит о сильных новостях;
- При хорошей волатильности рынка достижение крайних уровней сопротивления/поддержки происходит очень редко. Возможна торговля в противоположную сторону.
Классическая стратегия Pivot Point
Следует отметить, что из-за недостатка информации (открытого доступа) для многих трейдеров валютного рынка классический анализ индикатора останется тайной. Общие принципы анализа будут рассмотрены ниже.
Каждый бар характеризуется значениями: Open/Close – цена открытия/цена закрытия бара; High/Low – самая высокая цена/самая низкая цена за определенный расчетный период. По формуле расчета Pivot Point высчитывается разворотный уровень – это можно сделать при помощи обычного калькулятора или используя сам индикатор, вернее, его наложение на ценовой график в терминале МетаТрейдер.
После этого необходимо рассчитывать остальные уровни по соответствующим формулам или проанализировать данные графика. Расположение цены внизу точки разворота после открытия дневной сессии говорит о возможном движении цены вниз. Таким образом, нужно определить месторасположение линии и цены и работать по направлению к последней. Второстепенные уровни поддержки помогут в нахождении места, где цена может остановиться внутри торгового дня – именно здесь и нужно выставлять тейк-профит.
Стоит отметить, что классическая стратегия разворотной точки нуждается в доработке и характеризуется массой тонкостей, нюансов. Например, достаточно сложно сразу определить отработает ли следующий уровень или же цена, не дойдя до него, отобьется. Также непросто определить – сработает тейк-профит или не сработает. Для полноты картины рынка и принятия верного торгового решения необходимы дополнительные фильтры.
Недостатки индикатора Pivot Point
- Разворотный уровень индикатора должен быть динамичным, то есть меняться в зависимости от текущей торговой сессии – азиатской, американской или европейской. Однако это не всегда возможно.
- За один торговый день цена может несколько раз пересечь разворотную точку. В результате трейдер не сможет четко определить последующее движение валюты.
- На разных таймфреймах Pivot Point должен быть различным. Так, индикатор на 4-х часовом графике отличается от индикатора на недельном. Рабочий Pivot Point должен рассчитываться в зависимости от основного рабочего графика трейдера.
- Определенные сомнения вызывает метод расчета аналитического Pivot Point Рудольфом Акселем: неизвестно, как он высчитывает уровни и откуда их берет, а также что произойдет, если Аксель перестанет их публиковать.
Классическая формула расчета Pivot Point
Разворотный уровень Pivot Point = (Close + X + Z)/3;
Где: Close – цена закрытия; Z – максимальное значение цены за предыдущий день; Х – минимальное значение цены за предыдущий день.
После расчета разворотной точки можно рассчитать второстепенные уровни сопротивления/поддержки:
R2=Pivot + (R1 — S1);
S3=Low — 2*(High — Pivot);
R3=High + 2*(Pivot — Low).
Где: S1,S2,S3 — это уровни поддержки; R1,R2,R3 — соответственно, уровни сопротивления.
Точка разворота на форекс как основной индикатор перелома тренда
Всем привет, друзья. Я не очень большой любитель живых выступлений на публике, но стараюсь постепенно «прокачивать» этот навык. Через пару дней предстоит мне выступать с докладом на одной конференции. С каждым разом у меня становится все меньше волнения и нервов.
Рассказывать я буду про точку разворота на Форекс. Кстати, мне пришла в голову отличная идея.
Проведу я сейчас генеральную репетицию, так сказать, и познакомлю вас с основными моментами моего доклада. Долго мучить вас не буду – только полезная информация.
Точка разворота валютных пар
Точку разворота валютных пар на рынке Форекс принято называть пивотом или Pivot Points.
Умение правильно определять ее считается одним из ключевых моментов для успешной торговли.
Отметим, что эффективно работать с точками разворота можно, зная всего лишь три элемента:
- Запас хода на торговую сессию или день (разница между максимальной и минимальной ценой — Low и High).
- Точку разворота во время торговой сессии или дня.
- Направление тренда.
Если мы пользуемся правилом «тренд — твой друг» и заключаем сделки исключительно в направлении основного движения, знание места нахождения точки разворота позволит:
- определить потенциал заработка внутри торговой сессии или дня;
- застраховать себя от больших потерь в случае непредвиденной для нас смены тренда;
- выгодно входить в рынок в начале направленного движения, а не в его середине или конце, когда «ловить профит» уже поздно.
Умение правильно определять Pivot Points — необходимое (хотя и недостаточное) условие для получения стабильной прибыли от совершения покупок и продаж на Форексе.
Расчет пивотов
Предложенная нами схема лежит в основе всемирно известной тактики Pivot Points. Подробнее с ней можно ознакомиться в статье журнала «Финансовый спекулянт».
Точка Pivot рассчитывается по формуле:
Pivot = (High + Low + Close) / 3
Здесь: high — максимум вчерашнего дня; low — минимум вчерашнего дня; close — цена закрытия вчерашнего дня.
После определения Рivot можно рассчитать уровни сопротивления и поддержки по следующим формулам:
R1 = 2Pivot — Low;
S1 = 2Pivot — High;
R2 = Pivot + (R1 — S1);
S2 = Pivot — (R1 — S1);
R3 = High + 2 × (Pivot — Low);
S3 = Low — 2 × (High — Pivot).
Здесь: R1,R2,R3 — уровни сопротивления; S1,S2,S3 — уровни поддержки.
Отметим, что этой простой системой расчетов крупнейшие банки и фонды пользуются уже более полувека.
Однако классическая тактика Pivot Points не изменила соотношение успешных и проигравшихся трейдеров, которое осталось в пропорции 1 к 20. Поэтому правомерно говорить о недостатках этой системы, а также искать пути ее усовершенствования.
Недостатки классической методики
Несмотря на всю простоту предложенной тактики, после первых же попыток применить ее на практике у трейдера возникает ряд вопросов и дополнительных выводов:
И все это нужно применить к ОДНОЙ и той же ситуации на рынке, хотя все три переменные (High, Low, Close) в ранних уголках мира разные. Как в этом случае применять формулу Pivot = (High + Low + Close) / 3?
На рис. 1 показан график котировок валютной пары доллар/иена на 22-24 мая 2006 года. Пивот на следующий день для жителей Токио, Москвы, Лондона и Нью-Йорка находится в разных точках, так как для расчета нужно брать разные исходные.
Расположение пивотов на европейской, американской и азиатской сессии не совпадает.
Рис. 1. Пара usd/jpy 22-24 мая 2006 г.
Нужно ли воспринимать результат определения пивота как среднеарифметическую величину вроде скользящей средней, а не реальную точку, закрепившись ЗА которой, валюта совершает ЗАКОНОМЕРНЫЙ рывок в противоположную сторону?
По нашим расчетам, мы открываемся на 50% отката против тренда, а валюта делает разворот в сторону продолжения предыдущей тенденции только на 62%.
На рис. 2 видно, как пара евро/доллар 6 июня 2006 года, упав с локального максимума 1.2981 до 1.2922, затем поднялся вверх на 76% до 1.2962. После этого цена опустилась по внутринедельному тренду примерно на 400 пунктов до 1.2594.
Цена идет вниз на 400 пунктов, несмотря на ожидания.
Рис. 2. Движение котировок пары eur/usd 6 июня 2006 года.
Как Pivot Points может служить РЕАЛЬНОЙ точкой для открытия сделок, если валюта по несколько раз в день пересекает этот уровень?
На графике М15 пары евро/доллар (14 июня 2006 года) пивот по расчетам данных 13.06.2006 г. находится в точке: (1.2617 + 1.2529 + 1.2545) / 3 = 1.2564.
Однако происходит следующее: Высокая волатильность не позволяет точно определить пивоты.
Рис. 3. Торги парой eur/usd 13-14 июня 2006 года
Оказывается, на рынке Форекс точки разворота должны быть динамичными. Пройдя 70-100 пунктов за европейскую торговую сессию, пивот у валютной пары меняет свое местоположение. После американской и азиатской сессии происходит то же самое.
На рис. 4-5 видно, как пары фунт/доллар и евро/доллар (29-30 июня 2006 года), пробив пивот внутринедельного тренда, ни разу не пересекали внутрисессионные точки разворота. За полтора дня пройдено по несколько сотен пунктов.
«Конфликт» между внутридневными и внутрисессионными точками разворота.
Рис. 4. Торги парой gbp/usd 29-30 июня 2006 года
В паре с долларом евро ведет себя примерно так же, как фунт.
Рис. 5. Торги парой eur/usd 29-30 июня 2006 года
Оказывается, точки разворотов на различных ТФ должны находиться на разных уровнях, так как пивот:
- внутридневного тренда — это одно;
- внутринедельного тренда — другое;
- тренда нескольких недель и старших порядков тенденций — третье.
Напомним, что согласно классической тактике Pivot Points, необходимо учитывать только одно значение — по данным предыдущего дня.
Как быть с тем, что метод расчета точек разворота Рудольфа Акселя (DowJones) дает иные результаты, чем формула Pivot = (High + Low + Close)/3? Этот факт также говорит о несовершенстве системы Pivot Points.
Как определить точки разворота тренда?
Существует множество способов определения конечной цели движения цены, другими словами – разворотной точки тренда — и в каждой парадигме технического анализа — будь то графический, волновой или индикаторный анализ, не важно — имеются собственные способы определения точек разворота.
Несмотря на кажущуюся видовую разность этих способов, они между собой имеют много общего и, как правило, подразумевают под собой расчет цели на основе предыдущего движения цены.
На основе графических фигур
Определение целей на основе графических фигур — самый простой способ определения целей и при этом наиболее эффективный, в силу того, что более чем в 75% случаев (характерно для определенных фигур) цена доходит до своей цели при условии, что графический паттерн полностью сформирован (данная статистика основана на собственных исследованиях).
По завершению паттерна минимальная или первичная цель определяется, как 100% ценовой размах фигуры.
При этом для ГиП измерению подлежит расстояние от макушки до уровня шеи, а для треугольника — размах разброса цены внутри фигуры (размах разброса означает максимальное значение волатильности цены, достигнутое внутри фигуры).
Расчет цели ведется от места прорыва графической фигуры или от ближайшей границы фигуры. Для консервативного подхода рекомендуется отсчет вести от места прорыва.
При определенных обстоятельствах может возникнуть необходимость в получении дополнительных целевых уровней, в таком случае обычно используют коэффициенты Фибоначчи и умножают их на ценовой размах (138,2%, 150%, 161,8% и т.д.).
Приведу реальные примеры определения целей по данным фигурам, которые сам использую на практике. Примеры возьму наиболее свежие
Этот рисунок мы уже рассматривали, но теперь кроме ГиП здесь скобами показаны вибрации. Видно, что цель по ГиП также подтверждается целью по измеренному движению.
Скобы синего цвета представляют собой вибрации более старшего уровня, цель по ним также выполнена.
Не всегда можно четко разграничить границы вибрации, особенно на сильном тренде. Здесь как раз может помочь образовавшийся флаг или вымпел.
На паре фунт/доллар был образован классический паттерн «Голова и Плечи» (ТФ — Н4). Цена прошла чуть дальше целевого уровня, но, в целом, остановка тренда была определена достаточно четко.
К тому же существует возможность подтверждения целевого уровня за счет других способов определения целей, об этом чуть ниже.
Подобная ситуация с каналом. Если он достаточно широк, то для первой цели подойдет 100% размах, для узких и продолжительных каналов принято считать цели от 200% размаха и более.
Фигуры продолжения тенденции, такие как флаг и вымпел не используются непосредственно при определении целей, но они играют значительную роль при определении измеренного движения.
На основе предыдущей вибрации
Измеренное движение. Определение вибрации было дано в статье «Неоклассический технический анализ: построение пирамиды» и звучит следующим образом: вибрация — это полный цикл цены, заключающий в себе чередование основание — вершина — основание.
Суть его заключается в том постулате, что история повторяется и «изменение на рынке будет примерно таким же и в том же направлении, что и предыдущее колебание цен» (см. Джек Швагер «Технический анализ»).
Другими словами, следующая вибрация будет равной по длине и частоте предыдущей вибрации. Удобство этого метода заключается в том, что, во-первых, он легко может быть использован с любыми другими методами целевого определения, а во-вторых, вибрации могут накладываться одна на другую (т.е. большая может состоять из ряда маленьких), что в итоге повышает точность прогноза.
Не всегда можно четко разграничить границы вибрации, особенно на сильном тренде. Здесь как раз может помочь образовавшийся флаг или вымпел.
На данном рисунке флаг оказался разграничителем двух сильных вибраций. Видно, что очень четко была поймана вершина движения.
Коэффициенты
Другим распространенным способом определения целей на основе первой вибрации является умножение ее длины (размаха) на определенные коэффициенты.
Коэффициенты в различной литературе предлагаются самые разные — это и отношения Фибоначчи и множители от деления числа 7 на числа 5,4,3,2 (см. Швагер, Правило Семи) и *2 умноженный на простые числа… самым распространенными коэффициентами все же остаются отношения Фибоначчи: 0,382, 0,618 и т.д.
Относительно первой вибрации я предпочитаю использовать коэффициенты 1,618 и 2,618.
Коэффициент 1,618 дал наиболее точный сигнал на экстремум, нежели Г иП и измеренное движение. А вот до отметки в 2,618 мы еще не дошли, ее силу и важность подтверждает измеренное движение.
Впрочем, до отмеченной зоны осталось менее 50 пунктов, поэтому касания может и не случиться — рынок все же неидеален.
Ценовые проекции Томаса Демарка
Томас Демарк внес существенный вклад в развитие технического анализа. Основной его заслугой считается жесткая формализация всех допустимых построений, в том числе, и определения целей.
Тема определения целей по Демарку заслуживает отдельной статьи, в данном же материале мы рассмотрим самый простой из них — ценовые проекции.
Дадим определение ценового проектора: когда происходит ценовой прорыв нисходящей TD-линии, цены обычно продолжают двигаться вверх, по крайней мере, до отметки, соответствующей расстоянию между ценовым минимумом ниже TD-линии и ценовой точкой непосредственно над ним, прибавленному к значению цены в точке прорыва TD-линии вверх.
Пример по паре EUR/USD, ТФ — Н1. Сложилась на тот момент неопределенная ситуация, поскольку на Н4 уже дошли до первичной цели (см. рис. 1) от пробоя треугольника и не было однозначной уверенности в продолжении роста.
Однако цена оттолкнулась от линии тренда на Н4, а на Н1 впоследствии пробила TD-линию. Наложение целей по Н1 и Н4 на один целевой уровень позволили закрыть сделку практически по максимальной цене.
Рынок Форекс интересен и многообразен, и порой лучше себя показывают одни методы, а порой — другие. Стратегически важным преимуществом является подбор оптимального метода для конкретной рыночной ситуации.
Как мы рассмотрели на определенных примерах, возможность наложения различных методов способна дать максимально точный результат и серьезно повысить эффективность работы.
Pivot points
Профессиональные трейдеры и маркет мейкеры используют точки пивота для определения важных уровней поддержки и сопротивления.
Простые в построении, точки пивота и образуемые ними уровни поддержки/сопротивления составляют зоны, в области которых направление цены может измениться.
Точки пивота могут быть использованы как трейдерами, которые торгуют на пробое, так и теми, что выбирают для торговли диапазонные рынки.
При торговле на рынке, который находится в определенном диапазоне, точки пивота используются для определения точек разворота.
Если же Вы торгуете на трендовом рынке, то можете использовать этот инструмент для определения уровней, пробой которых означает возникновение тренда на рынке.
Ниже приведен пример пивот точек, построенных на часовом графике EUR/USD.
Как рассчитываются
Точка пивота и соответствующие ей уровни поддержки и сопротивления рассчитываются, используя данные уровней открытия, максимума, минимума и закрытия последней торговой сессии.
Так как форекс – круглосуточный рынок, большинство трейдеров берут время закрытия по Нью-Йорку – 4:00 pm EST.
Расчет точки пивота показан ниже:
Pivot Point (PP-точка пивота) = (High+Low+Close)/3.
Уровни поддержки и сопротивления рассчитываются затем, используя точку пивота. Первый уровень поддержки и сопротивления:
Первая поддержка (S1) = (2*PP) – High
Первое сопротивление (R1) = (2*PP) – Low
Второй уровень поддержки и сопротивления:
Вторая поддержка (S2) = PP – (High – Low)
Второе сопротивление (R2) = PP + (High — Low)
Не стоит волноваться о расчетах – Вам не придется делать их самим. Ваше программное обеспечение автоматически сделает все и построит уровни на графике.
Эти дополнительные уровни не настолько значимы как основные пять, однако не повредит обратить на них внимание. Ниже пример.
Как используются точки разворота в торговле
Торговля на пробое. Точка пивот – это первоочередной уровень, к которому стоит присмотреться при входе в рынок, так как это – первичный уровень поддержки/сопротивления. Самые мощные ценовые движения происходят в зоне точки пивот.
В общих чертах положение следующее: если цена находится над уровнем пивот, то настроения на рынке бычьи, а если ниже уровня, то медвежьи.
Предположим, что цена колеблется возле точки разворота и закрывается ниже ее уровня, и Вы решаете открыть позицию на продажу. Ваш уровень стопа должен быть выше точки пивот, а первая цель взятия прибыли – на уровне поддержки – S1.
Однако, если Вы видите, что цена падает ниже S1, вместо того, чтобы выйти на уровне S1, Вы можете передвинуть стоп-лосс на уровень чуть выше S1 и внимательно следить за ситуацией.
Та же ситуация, только в зеркальном отображении справедлива и для ап-тренда. Если цена закрылась над уровнем PP (пивот точки), то осуществляется вход на покупку, стоп-лосс устанавливается над PP, а сопротивления R1 и R2 используются в качестве уровней профита.
Торговля на диапазонном рынке. Сила поддержки и сопротивления разных уровней пивот определяется количеством отскоков цены от них.
Чем больше цена касается уровня, а затем отскакивает, тем сильнее этот уровень для пробоя. С англ. пивотинг (pivoting) означает достижение поддержки или сопротивления, а затем разворот. Поэтому и название инструмента –»пивот».
Если пара торгуется в районе верхнего сопротивления, то Вы можете продать ее, выставив стоп-лосс сразу над уровнем этого сопротивления.
Если же пара продолжает расти, преодолевает уровень сопротивления, то это уже будет картина пробоя ап-трендом, которую рисует рынок.
В этом случае нужно закрыть короткую позицию, и если сила покупателей достаточно мощная, то можно перевернуться и стать в лонг. Тогда уровень стопа должен быть чуть ниже уровня только что пробитого сопротивления, которое уже стало поддержкой.
Если же пара находится в районе нижней поддержки, то можно ее купить, выставив стоп-лосс ниже уровня поддержки.
В теории все идеально?
В теории это звучит очень просто. Но не тут-то было! В реальном мире точки пивот не работают каждый раз. Тенденция колебания цены в районе линий пивот есть, но временами невероятно сложно сказать, как она поведет себя дальше.
Вам нужно быть очень избирательными и создать торговую стратегию по точкам пивот, которой Вы будете строго следовать.
Давайте рассмотрим график, чтобы увидеть насколько простыми и в то же время сложными могут быть точки пивот.
Посмотрите на оранжевый овал. Заметьте, что PP был сильным уровнем поддержки, однако, если Вы откроете лонг на уровне PP, то никогда не увидите цену на уровне R1, чтобы закрыть профит.
На втором пробое (второй фиолетовый круг), пара все же достигла S1 перед тем, как еще раз развернуться к уровню PP.
Теперь взгляните на розовый овал. Снова PP ведет себя как сильная поддержка, но цена так и не достигает R1.
На желтом круге, пара снова совершает пробой вниз, снижается прямо к S1, и доходит до S2. Если бы Вы вошли в длинную позицию по этому графику, Вы бы были остановлены рынком каждый раз.
Помните, тренд – Ваш друг. А мы не любим поворачиваться спиной к друзьям, поэтому мы делаем все возможное, чтобы не идти против тренда.
В следующем уроке, Вы изучите как использовать разные таймфреймы для торговли в правильном трендовом направлении, для того, чтобы свести к минимуму возможные ошибки, такие как рассмотренная выше.
Подсказки для торговли
Ниже представлено несколько подсказок, которые легко запоминаются и помогают принять разумные решения при торговле с пивот точками.
- Если цена находится на уровне PP (пивот точки), ожидайте, что она пойдет в направлении R1 или S1.
- Если цена на уровне R1, ожидайте движения до R2 или назад до PP.
- Если цена возле S1, ожидайте движения до S2 или назад до PP.
- Если цена на R2, ожидайте движения до R3 или назад до R1.
- Если цена на S2, ожидайте движения на S3 или назад до S1.
- Если нет значимых новостей, которые могут повлиять на рынок, то цена обычно колеблется от P до S1 или R1.
- Если есть важные новости, которые влияют на рынок, то цена может пойти прямо через R1 или S1 и достигнуть R2 или S2 и даже R3 или S3.
R3 и S3 – это показатели максимально возможных размеров движения, в дни высокой волатильности, однако достижение этих уровней происходит не так часто.
Линии пивот хорошо работают при боковых движениях, где цена колеблется в основном возле R1 и S1. При сильном тренде цена пробивает линию пивот и идет дальше.
Точки пивот – инструмент, который используют профессиональные трейдеры и маркет мейкеры для определения точек входа в рынок и выхода из него на протяжении торгового дня.
Данные для расчета точек пивот берутся из предыдущего торгового дня. Лучше всего использовать эту технику после определения направления тренда.
Как видно из графиков выше, уровни пивот могут быть чрезвычайно полезны, так как многие валютные инструменты тяготеют к ним.
Трейдеры, торгующие на диапазонных рынках входят в лонг, когда цена достигает уровня поддержки, и открывают шорт возле сопротивления.
Простота точек разворота определенно делает их полезным инструментом для набора трейдера. Они помогают определить зоны, где цена с высокой вероятностью подвержена движению.
Вы станете более синхронизированы с рынком и сможете принимать правильные торговые решения.
Практикуйтесь в применении точек разворота с другими техническими индикаторами, такими как графические фигуры, MACD, скользящие средние, стохастик. Чем сильнее подтверждение сигнала, тем выше вероятность профита!
Точки разворота
Точки разворота широко применяются трейдерами всего мира, так как они очень просты и эффективны в применении, когда трейдер составляет свою торговую стратегию.
Именно точки разворота составляют основу практически любого технического анализа и позволяют определить важные уровни поддержки и сопротивления.
Она поможет определить будущую ценовую динамику и возможный диапазон ценового изменения.
Данный инструмент используется не только трейдерами, но и различным финансовыми институтами, а также банками, так как это индикаторы сильного и слабого состояния рынка.
Использование точек вращения
Особенно полезно использовать Pivot Points трейдерам, отдающим предпочтение торговле на небольших временных промежутках или внутридневной торговле, то есть тем, кто играет на относительно небольших изменениях цены.
Они помогут и трейдерам, определяющим точку разворота, и трейдерам, стремящимся определить ключевые уровни, чтобы впоследствии их пробить для классификации конкретного движения цены в качестве пробоя.
Точка вращения рассчитывается как среднее значение от цен: минимальной и максимальной, за предыдущий период торговли, открытия и закрытия.
Впрочем, можно выделить несколько вариантов расчета, а также классический способ, в основе которого лежит следующая формула:
Точка разворота рынка = (Максимум + Минимум + Цена закрытия) / 3
Следующую точку вращения можно рассчитать при помощи четырехчасового графика, то есть подставить его показатели в упомянутую формулу, что позволит получить две точки вращения для одной сессии (или шесть точек разворота для одного дня торгов).
Расчет Pivot Points
Кроме того, уровни сопротивления и поддержки рассчитываются по специальным формулам, которые также способны найти и определить закономерность ценового движения, хоть иногда и с переменным успехом.
Речь идет о следующих формулах расчета Pivot Points (PP), уровней поддержки (Sup) и сопротивления (Res):
PP = (High + Low + Close + Close) / 4
Res1 = 2 × PP — Low , Sup1 = 2 × PP — High
Res2 = PP + (High — Low), Sup2 = PP — (High — Low)
Res3 = Res1 + (High — Low), Sup3 = Sup1 — (High — Low)
Этот расчет предполагает применение максимума (High), минимума (Low), а также закрытия цены (Close) предшествующего дня торгов.
Именно эти данные позволят определить точку разворота, а также три уровня сопротивления и поддержки на следующий торговый день.
Фактически, можно сказать, что в математическом понимании точка вращения представляет собой нечто наподобие средневзвешенного значения предшествующего дня. Результаты исчисления, произведенных вышеприведенными формулами, практически аналогичны.
В зависимости от конкретной торговой системы, расчеты могут производиться не только для текущего рабочего дня, но и для текущей сессии, недели и т. д.
Использование Pivot Points — это прекрасная возможность систематизировать бесконечное движение рынка, трезво оценивая рисковую готовность каждого конкретного финансового центра и взаимодействуя этой информацией с другими аналитическими материалами.
Зачастую приверженцы Pivot Points берут данные о точках разворота не из вычислений, а из новостной ленты Dow Jones. Из этих же сообщений можно почерпнуть информацию и об основных линиях сопротивления и поддержки.
Разворот тренда: сущность и основные способы определения
Точки разворота представляют собой уровни цены, достигнув которые движущийся по определенному тренду курс валюты встречает на своем пути преграду и изменяет направление, либо переходит в «боковое» движение.
Вот чем еще полезны трейдеру точки разворота тренда:
- Они позволяют вычислить примерные уровни поддержки и сопротивления валютной пары для любого временного периода.
- Взяв за основу точки разворота можно определить торговый диапазон, что позволит значительно повысить эффективность управления рисками — важнейшей составляющей успеха любого форекс-трейдера.
- Определение точек разворота и четкое соблюдение установленных диапазонов способно защитить трейдера от разорения в случаях, когда рынок неожиданно разворачивается и идет в противоположную сторону. Трейдер сможет вычислить пробои торговых диапазонов на графиках и оперативно ликвидировать нежелательную позицию.
Рассматривая валютный рынок как «живой» организм, можно объяснить влияние на него точек разворота следующим образом: у рынка имеются определенные воспоминания из прошлого, связанные с ценовыми уровнями, которые соответствуют разворотным точкам.
Это событие оказало на рынок такое же влияние, которое стрессовые факторы оказывают на человека.
Теперь всякий раз при достижении рынком точек разворота в его «памяти» будут всплывать прошлые ощущения, что приведет к развороту тренда либо его замедлению. Как трейдер может определить разворотные точки тренда?
Способов существует множество, но самыми популярными и широко используемыми из них является определение точек разворота на основе графических фигур и предыдущей вибрации.
Определение разворотных точек на основе графических фигур. Самый простой и наиболее эффективный способ определения точек разворота.
При условии, что графический паттерн полностью сформирован, существует вероятность 75 % и более того, что цена дойдет до своей цели. Рекомендуется использовать графические фигуры «Треугольник» и «Голова и Плечи».
Первичная цель при завершении паттерна определяется как 100%-й ценовой размах фигуры.
При использовании фигуры «Голова и Плечи» трейдеру следует обратить внимание на расстояние от макушки и вплоть до уровня шеи, а применяя «Треугольник» необходимо измерить размах ценового разброса внутри фигуры.
Цена рассчитывается трейдером от области прорыва фигуры и до ее ближайшей границы.
Если в процессе расчета от трейдера потребуется определение дополнительных целевых уровней, рекомендуется использование коэффициентов Фибоначчи и дальнейшее умножение их на ценовой размах.
Определение разворотных точек на основе предыдущей вибрации. Вибрация представляет собой полный ценовой цикл, который предполагает чередование «основание — вершина — основание».
Метод измеренного движения предполагает использование двух постулатов:
- «Рыночные изменения будут происходить примерно в том же направлении, что и прошлые ценовые колебания».
- «История повторяется».
Рис. 1. Измеренное движение
Обратите внимание на рис. 1. Что мы можем там увидеть? Абсолютно верно — равные по своей длине и частоте вибрации. Каждая следующая вибрация аналогична по частоте и длине предыдущей вибрации.
Рисунок 1 наглядно демонстрирует нам, что цель по фигуре «Голова и Плечи» подтверждается целью по измеренному движению. Скобами синего цвета выделены вибрации более старшего уровня, цель по которым также выполняется.
Разграничение границ вибрации при сильном тренде часто бывает затруднено, потому на помощь трейдеру приходит образовавшаяся фигура вымпела или флага (см. рис. 2).
На этом рисунке флаг позволил разграничить две сильные вибрации и поймать вершину движения. Метод «коэффициентов» также часто используется для определения целей и основывается на первой вибрации.
В данном случае размах вибрации умножается на коэффициенты. Несмотря на огромный выбор коэффициентов, далеко не каждый из них приведет трейдера к цели.
Профессионалы рекомендуют применять классические и хорошо изученные коэффициенты, такие как отношения Фибоначчи.
Рис. 3. Коэффициенты
Обратимся к рисунку 3. Для первой вибрации были использованы коэффициенты 1,618 и 2,618. Если коэффициент 1,618 дал четкий сигнал на экстремум, то сила коэффициента 2,618 была подтверждена измеренным движением, но достичь данной отметки не удалось.
Тем не менее, до выделенной зоны осталось меньше 50 пунктов и независимо от того, произойдет касание либо нет, можно смело говорить о неидеальности рынка.
Поэтому, основной задачей трейдера является правильный выбор методов, который необходимо сделать только после оценки ситуации на рынке, а не полагаясь на собственную интуицию.
Для чего нужны точки разворота на Форекс?
В работе с биржами Форекс аналитические инструменты имеют одно из главнейших значений.
Многие из них помогают определить, где именно произойдет переломный момент и тренд изменит свое направление, из чего становится понятно, когда актив необходимо покупать, а где будет лучше его продать.
Одним из таких инструментов, широко применяемых на практике, являются точки разворота или точки пивот.
Как использовать?
Точками разворота называются ключевые точки в экстремальных позициях при исследовании уровней поддержки и сопротивления. Для их вычисления используют соответствующие формулы, которые в разных случаях могут рассчитываться по-разному.
В большинстве случаев используют классический вариант, по которому считают, в том числе на Уолл-Стрит, уже в течение нескольких десятилетий.
После того, как значения данной точки получены, их можно использовать при расчетах зон сопротивления и зон поддержки.
Затем все полученные значения используют для создания мониторинговой зоны, которая поможет оценить текущую цену и сделать необходимый выбор.
Преимущества
Хорошо настроенный инструмент всегда дает соответствующий результат, так дела обстоят и с точками пивот. Если грамотно настроить алгоритм мониторинга и торговли с использованием точек разворота, можно добиться:
- повышение общего качества прогнозирования;
- сокращение убытков, связанных с вынужденными торговыми потерями за счет увеличения шансов удачного прогнозирования;
- возможность поучаствовать в режиме агрессивного торга и заработать сверхприбыли;
- увеличение общей прибыли от более успешной торговли.
Интересной особенностью точек пивот является то, что с ними, несмотря на кажущуюся сложность описываемого механизма, достаточно просто и комфортно работать.
Точки разворота однозначно являются одним из приоритетных инструментов любого профессионального трейдера, однако научиться их использовать могут и новички.
Точки разворота как признаки изменения тренда
Вот пара советов по использованию этой техники. Хотя пробитие одного из подобных краткосрочных максимумов на снижающемся рынке указывает на разворот тренда вверх, некоторые пробития лучше других.
На верхненаправленном трендовом рынке минимум, которого на рушается или опускается ниже прежнего уровня, будет либо минимумом, предшествующим образованию нового максимума роста, как это показано в части (А) рисунка, либо будет минимумом, образующимся после снижения максимума, который затем поднимается, образуя более низко расположенный краткосрочный максимум.
Далее он опускается ниже минимума, предшествовавшего подъему, не сумевшему зафиксировать новый максимум, как это показано в части (В).
Нарушение минимума, показанное в части (А), «лучший» признак настоящего изменения тренда.
Точно так же разворот тренда вверх произойдет по одной из двух следу ющих фигур: (А) пик роста, предшествующий новому минимуму, пробива ется вверх, либо (В) рынок создает более высокий минимум, а затем под нимается выше краткосрочного максимума между двумя этими минимумами.
И в этом случае фигура (А) — «лучший» признак реального разворота тренда. Учитывая сказанное, рассмотрите рисунок, представляющий 15-ми нутный график бондов в сентябре 1989 г.
Главные движения тренда были должным образом зафиксированы этой техникой.
Определение: опорная точка
| Валюта | Время | BUY | SELL | Profit |
|---|---|---|---|---|
| EURUSD | 02.22 10:02 | 1.1035 | 1.1003 | +32 |
| GBPUSD | 02.22 10:02 | 1.4168 | 1.407 | +98 |
| USDCHF | 02.21 06:02 | 0.992 | 0.9886 | +34 |
| USDJPY | 02.21 06:02 | 113.04 | 112.42 | +63 |
| AUDUSD | 02.22 06:02 | 0.7243 | 0.7212 | +31 |
| Торговая система форекс |
Trader Room — это удобные инструменты современных валютных трейдеров.
Новости форекса с фильтрацией по странам, тематикам в онлайн режиме, отчеты заседаний центробанков.
Экономический календарь событий с подробными отчетами событий, фильтрация по важности, валютным парам, доступны описания и история показателей.
Финансовый словарь с более чем 11 тыс. слов по категориям (форекс, банковская тематикая, технический анализ и др.)
Все необходимые приложения для валютного трейдинга на одной странице. Открыть аккаунт
-
BINARIUM
Старейший брокер по бинарным опционам. Огромный раздел по обучению.
Регистрация
-
☆☆☆☆☆
★★★★★
EVOTRADE
Бонусы для новых трейдеров до 5000$, сигналы, стратегии и быстрый вывод заработанных денег!
Регистрация
Пересечение прямой с поверхностью вращения
Пересечение прямой с поверхностью вращения — это задача по определению точек встречи прямой с поверхностью вращения.
Поверхность вращения представляет собой поверхность вращения с образующей в виде окружности.
Найти пересечение прямой с поверхностью вращения: d ∩ α = ?
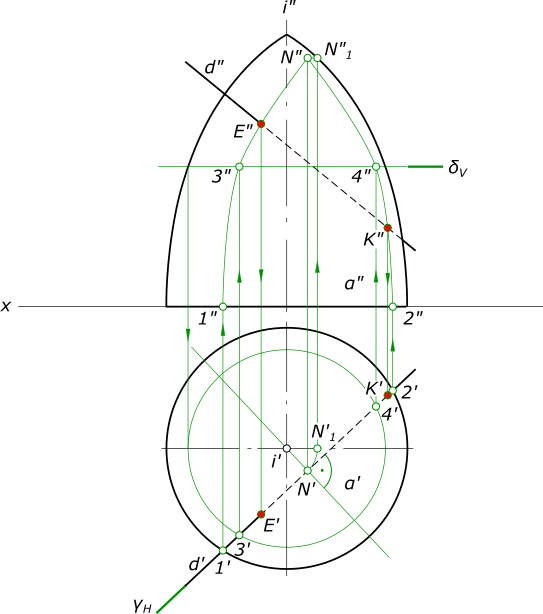
Пересечение прямой с поверхностью вращения
Здесь прямая d занимают общее положение и поверхность вращения α формируется кривой линией.
Решать задачу на пересечение прямой с поверхностью вращения следует, применяя алгоритм пересечения прямой с поверхностью:
— Заключаем прямую d в вспомогательную горизонтально проецирующую плоскость γ, которая пересечет поверхность вращения по кривой линии, которую необходимо построить:
— Находим точки пересечения 1 и 2 этой плоскости с основанием поверхности вращения;
— Находим наивысшую точку N линии сечения поверхности вращения;
— Вспомогательная плоскость уровня δV дает возможность построить точки 3 и 4 линии сечения;
— Соединяем плавной кривой точки 1, 2, 3, 4 и N и получаем линию сечения;
— Находим точки E и K пересечения прямой с линией сечения поверхности вращения.
Пересечение прямой с поверхностью цилиндра — это также задача по определению видимости с помощью конкурирующих точек:
— для горизонтальной плоскости проекций;
образующие 1, 3, N и 2, 4, N видимы. Прямая d видима за пределами отрезка EK;
— для фронтальной плоскости проекций;
образующая 1, 3, N видим и 2, 4, N невидима. Прямая d видима до точки K встречи с поверхностью α, участок прямой d за точкой K невидим до очерковой образующей.
+