Добрый день! Пардон за качество чертёжа.

В данном случае удар считается абсолютно упругим, диссипацией кинетической энергии следует пренебречь.
Согласно закону сохранения импульса, [math]mv_1=(M+m)v_2[/math], где [math]m[/math] — масса пули, [math]M[/math] — масса маятника, [math]v_1[/math] — скорость пули; [math]v_2[/math] — скорость системы после попадания и застревания пули.
Тогда [math]v_2=frac{mv_1}{(M+m)}=frac{0,01cdot500}{0,01+5}approx1[/math] м/с
Определим высоту [math]h[/math], на которую поднялся маятник после попадания пули, используя закон сохранения механической энергии:
[math](m+M)gh=frac{(m+M)v_2^2}{2}[/math]
[math]h=frac{(m+M)v_2^2}{2(m+M)g}=frac{v_2^2}{2g}=frac{1}{2cdot9,8}approx0,05[/math] м
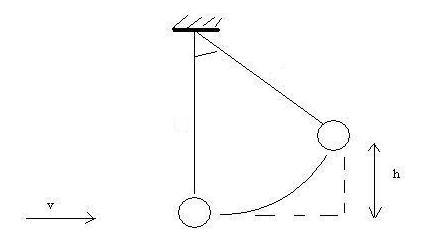
Дальнейшее решение сводится к геометрической задаче определения угла отклонения маятника, т. е. центрального угла окружности, содержащей дугу траектории маятника. Длина нити [math]l=1[/math] м.
Я пытался использовать теорему синусов, построил несколько треугольников, в результате чего получил нагромождение расчётов и две неизвестные…
Решение.
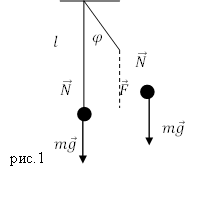
Рассмотрим процесс столкновения пули и шара (неупругое взаимодействие). Запишем закон сохранения импульса (рис 1):
[ mcdot {{vec{upsilon }}_{1}}=(m+M)cdot vec{upsilon }. ]
Найдем проекции на ось Ох. Определим начальную скорость маятника вместе с пулей.
[ mcdot {{upsilon }_{1}}=(m+M)cdot upsilon ,upsilon =frac{mcdot {{upsilon }_{1}}}{(m+M)} (1).
]
Рассмотрим процесс движения маятника вместе с пулей.
Запишем закон сохранения энергии (рис 2). Определим максимальную высоту поднятия маятника:
[ frac{(m+M)cdot {{upsilon }^{2}}}{2}=(m+M)cdot gcdot h,{{upsilon }^{2}}=2cdot gcdot h,h=frac{{{upsilon }^{2}}}{2cdot g},h=frac{{{m}^{2}}cdot upsilon _{1}^{2}}{2cdot gcdot {{(M+m)}^{2}}} (2). ]
Зная максимальную высоту поднятия маятника определим угол отклонения маятника
[ begin{align}
& frac{l-h}{l}=cos alpha ,1-frac{h}{l}=cos alpha ,cos alpha =1-frac{{{m}^{2}}cdot upsilon _{1}^{2}}{2cdot gcdot {{(M+m)}^{2}}cdot l}(3). \
& cosalpha =1-frac{{{(15cdot {{10}^{-3}})}^{2}}cdot {{200}^{2}}}{2cdot 10cdot {{(1,5+0,015)}^{2}}cdot 1}=0,8. \
end{align} ]
аrссоs0,8 = 37º.
Ответ:37º.
Метод наклонного маятника
Измерение
силы трения с помощью наклонного маятника
основано на измерении уменьшения его
амплитуды за определенное число
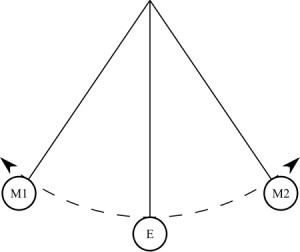
колебаний. Пусть α0
– максимальный угол отклонения маятника
в начальный момент движения; αn
– максимальное значение угла отклонения
маятника после n
колебаний (рис. 2); точка B
определяет положение шарика в начальный
момент отклонения маятника на угол α =
α0;
точка
B′
— положение шарика после n
колебаний в момент отклонения маятника
на угол α = αn.
За n
колебаний полная энергия E
маятника уменьшается на величину E,
равную убыли его потенциальной энергии:
![]()
где
h
– изменение высоты центра тяжести
шарика после n
колебаний в момент максимального
отклонения из положения равновесия
![]() .
.
(8)
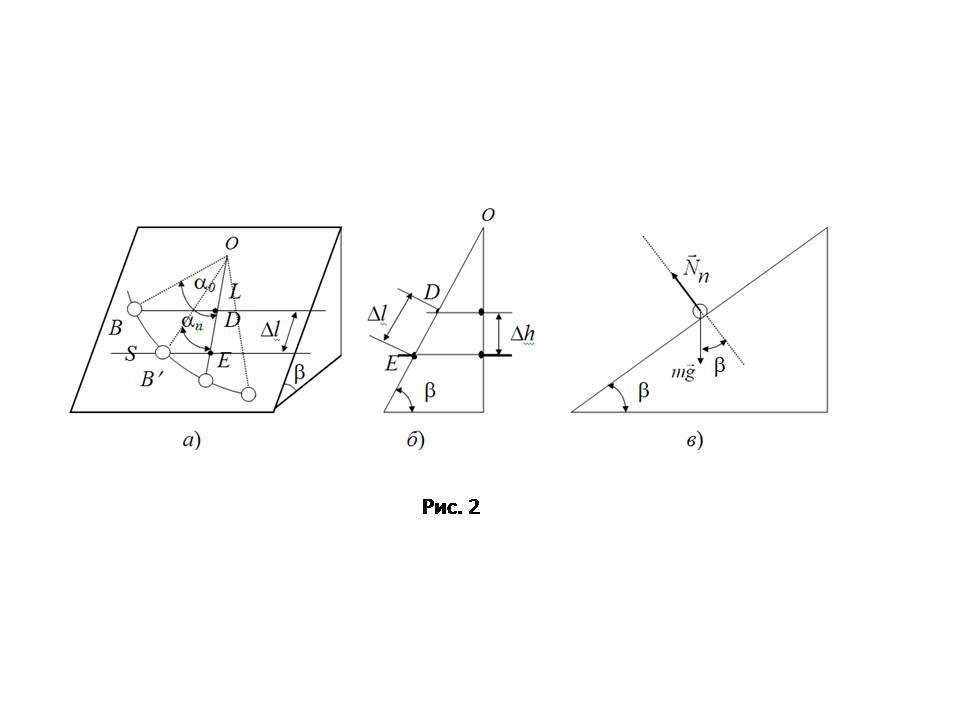 Рис.
Рис.
2
а
б
в
13
Убыль
потенциальной энергии равна работе сил
сопротивления и сил трения, взятых по
модулю, на пройденном пути S
за n
колебаний
![]() (9)
(9)
г де
де![]() =
=
![]() –
–
работа сил трения качения; S
— путь, который проходит центр тяжести
шарика за n
полных колебаний, равен S
=4Lnαср;
L–длина
маятника; ![]() –
–
работа по преодолению сопротивления
среды и трения в точке подвеса маятника.
Так
как с течением времени
Рис.
3
происходит
затухание колебаний, то значение
максимального угла отклонения αn
маятника от положения равновесия
уменьшается. Поэтому при расчете пути
S,
пройденного шариком за n
колебаний, берем среднее значение
максимального угла αср:
![]()
Пренебрегая
в (4) ΔАсопр,
ввиду малости, имеем
![]() (10)
(10)
Для
получения расчетной формулы выбираем
модель, в которой возникновение трения
качения объясняется деформациями шарика
и опоры. При этом могут возникать как
упругие, так и неупругие деформации.
Из-за деформации поверхностей линия
действия силы реакции
![]() не
не
совпадает с линией действия силы
нормальной реакции опоры (рис.3), в нашем
случае равной весу
![]() шарика. Нормальная составляющая
шарика. Нормальная составляющая![]() силы реакции опоры численно равна весу
силы реакции опоры численно равна весу![]() шарика, а горизонтальная составляющая
шарика, а горизонтальная составляющая![]() представляет силу трения качения
представляет силу трения качения![]() :
:
![]() ;
;
![]()
По
правилу равенства моментов сил:

O

![]() (11)
(11)
где
k
– коэффициент трения качения представляет
плечо силы Nn
и имеет размерность длины, м; R
– радиус шара (рис. 3). Из (11) получаем:
![]() (12)
(12)
По
второму закону Ньютона для шарика имеем
(рис. 2, в)
![]()
откуда
в проекциях на ось y
![]() (13)
(13)
здесь β – угол наклона плоскости, на
которую опирается шарик, подвешенный
на нити, m
– масса шарика. Подставив формулы (8) и
(12) в формулу (10):
![]() (14)
(14)
находим
формулу для k:
![]() (15)
(15)
в
которой Δl
=
ОЕ
–
ОD
(рис.
2, б).
Учитывая,
что α0
и
αn
малы и cos
α = (1– 2 sin
(α2/2)),
окончательно будем иметь:
 (16)
(16)
Формула (16) – рабочая формула для
определения коэффициента
трения
качения, где n
– число полных колебаний Δl
=
ОЕ
–
ОD.
Здесь α0
и αn
– углы, выраженные в радианах.
В
случае скольжения шара по поверхности
опоры сила трения скольжения определяется
формулой:
![]() (17)
(17)
где
μ – коэффициент трения скольжения,
зависящий от материала и качества
обработки соприкасающихся поверхностей,
то есть шарика и опоры, слабо зависящий
от скорости скольжения и практически
не зависящий от площади контакта опоры
и шарика, Nn
– сила нормальной реакции опоры.
Сравнив
соотношения (12) и (17), формулу (16) можно
привести к виду:
![]() (18)
(18)
рабочая
формула для определения коэффициента
трения скольжения.
Схема
лабораторной установки
У становка
становка
представлена на рис. 4 и состоит из:
основания 1, вертикальной стойки 2,
верхнего кронштейна 3 с панелью 4, маятника
скольжения и маятника качения, которые
устанавливаются на верхнем кронштейне
3 поочередно. Основание 1 снабжено тремя
регулируемыми опорами 5 и зажимом 6 для
фиксации вертикальной стойки 2.
Вертикальная стойка 2 выполнена из
металлической трубы, на которую нанесена
риска, показывающая угол отклонения
панели 4 от вертикального положения.
Панель 4 имеет прямоугольное окно, в
котором устанавливаются сменные образцыРис.
4
в
виде пластин. В нижней части панели
нанесена шкала отсчета угла отклонения
маятников. С помощью винта 7 панель
отклоняется от вертикального положения.
Угол отклонения панели определяется с
помощью шкалы 8, закрепленной в нижней
части панели. Маятник скольжения
представляет собой металлический
стержень 9, снабженный призматической
опорой 10 и обоймой 11, в которую
устанавливаются сменные образцы в виде
усеченного шара. Маятник качения
представляет собой металлический шарик
12, подвешенный на капроновой нити 13.
Шары являются сменными. Маятник скольжения
отводят рукой на некоторый угол и
отпускают без толчка. Затем вместо
маятника скольжения устанавливается
маятник качения, отводят его на такой
же угол, что и маятник скольжения, и
снимают показания.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Формулы математического маятника
Определение и формулы математического маятника
Математический маятник — это колебательная система, являющаяся частным случаем физического маятника, вся масса которого сосредоточена в одной точке, центре масс маятника.
Обычно математический маятник представляют как шарик, подвешенный на длинной невесомой и нерастяжимой нити. Это идеализированная система, совершающая гармонические колебания под действием силы тяжести. Хорошим приближением к математическому маятнику массивный маленький шарик, осуществляющий колебания на тонкой длинной нити.
Галилей первым изучал свойства математического маятника, рассматривая качание паникадила на длинной цепи. Он получил, что период колебаний математического маятника не зависит от амплитуды. Если при запуске мятника отклонять его на разные малые углы, то его колебания будут происходить с одним периодом, но разными амплитудами. Это свойство получило название изохронизма.
Уравнение движения математического маятника
Математический маятник — классический пример гармонического осциллятора. Он совершает гармонические колебания, которые описываются дифференциальным уравнением:
где $varphi $ — угол отклонения нити (подвеса) от положения равновесия.
Решением уравнения (1) является функция $varphi (t):$
где $alpha $ — начальная фаза колебаний; $<varphi >_0$ — амплитуда колебаний; $<omega >_0$ — циклическая частота.
Колебания гармонического осциллятора — это важный пример периодического движения. Осциллятор служит моделью во многих задачах классической и квантовой механики.
Циклическая частота и период колебаний математического маятника
Циклическая частота математического маятника зависит только от длины его подвеса:
Период колебаний математического маятника ($T$) в этом случае равен:
Выражение (4) показывает, что период математического маятника зависит только от длины его подвеса (расстояния от точки подвеса до центра тяжести груза) и ускорения свободного падения.
Уравнение энергии для математического маятника
При рассмотрении колебаний механических систем с одной степенью свободы часто берут в качестве исходного не уравнения движения Ньютона, а уравнение энергии. Так как его проще составлять, и оно является уравнением первого порядка по времени. Предположим, что трение в системе отсутствует. Закон сохранения энергии для совершающего свободные колебания математического маятника (колебания малые) запишем как:
где $E_k$ — кинетическая энергия маятника; $E_p$ — потенциальная энергия маятника; $v$ — скорость движения маятника; $x$ — линейное смещение груза маятника от положения равновесия по дуге окружности радиуса $l$, при этом угол — смещение связан с $x$ как:
Максимальное значение потенциальной энергии математического маятника равно:
Максимальная величина кинетической энергии:
где $h_m$ — максимальная высота подъема маятника; $x_m$- максимальное отклонение маятника от положения равновесия; $v_m=<omega >_0x_m$ — максимальная скорость.
Примеры задач с решением
Задание. Какова максимальная высота подъема шарика математического маятника, если его скорость движения при прохождении положения равновесия составляла $v$?
Решение. Сделаем рисунок.
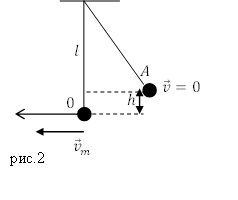
Пусть ноль потенциальной энергии шарика в его положении равновесия (точка 0).В этой точке скорость шарика максимальна и равна по условию задачи $v$. В точке максимального подъема шарика над положением равновесия (точка A), скорость шарика равна нулю, потенциальная энергия максимальна. Запишем закон сохранения энергии для рассмотренных двух положений шарика:
Из уравнения (1.1) найдем искомую высоту:
Ответ. $h=frac<2g>$
Задание. Каково ускорение силы тяжести, если математический маятник имеющий длину $l=1 м$, совершает колебания с периодом равным $T=2 с$? Считайте колебания математического маятника малыми.textit<>
Решение. За основу решения задачи примем формулу для вычисления периода малых колебаний:
Выразим из нее ускорение:
Проведем вычисления ускорения силы тяжести:
Ответ. $g=9,87 frac<м><с^2>$
Математический маятник: период, ускорение и формулы
Механическая система, которая состоит из материальной точки (тела), висящей на нерастяжимой невесомой нити (ее масса ничтожно мала по сравнению с весом тела) в однородном поле тяжести, называется математическим маятником (другое название – осциллятор). Бывают и другие виды этого устройства. Вместо нити может быть использован невесомый стержень. Математический маятник может наглядно раскрыть суть многих интересных явлений. При малой амплитуде колебания его движение называется гармоническим.
Общие сведения о механической системе

Если маятник находится в положении равновесия (висит отвесно), то сила тяжести будет уравновешиваться силой натяжения нити. Плоский маятник на нерастяжимой нити является системой с двумя степенями свободы со связью. При смене всего одного компонента меняются характеристики всех ее частей. Так, если нитку заменить на стержень, то у данной механической системы будет всего 1 степень свободы. Какими же свойствами обладает математический маятник? В этой простейшей системе под воздействием периодического возмущения возникает хаос. В том случае, когда точка подвеса не двигается, а совершает колебания, у маятника появляется новое положение равновесия. При быстрых колебаниях вверх-вниз эта механическая система приобретает устойчивое положение «вверх тормашками». У нее есть и свое название. Ее называют маятником Капицы.
Свойства маятника
• Если, сохраняя одинаковую длину маятника, подвешивать различные грузы, то период их колебаний получится одинаковым, хотя их массы будут сильно различаться. Следовательно, период такого маятника не зависит от массы груза.
• Если при запуске системы отклонять маятник на не слишком большие, но разные углы, то он станет колебаться с одинаковым периодом, но по разным амплитудам. Пока отклонения от центра равновесия не слишком велики, колебания по своей форме будут достаточно близки гармоническим. Период такого маятника никак не зависит от колебательной амплитуды. Это свойство данной механической системы называется изохронизмом (в переводе с греческого «хронос» — время, «изос» — равный).
Период математического маятника
Этот показатель представляет собой период собственных колебаний. Несмотря на сложную формулировку, сам процесс очень прост. Если длина нити математического маятника L, а ускорение свободного падения g, то эта величина равна:
Период малых собственных колебаний ни в какой мере не зависит от массы маятника и амплитуды колебаний. В этом случае маятник двигается как математический с приведенной длиной.
Колебания математического маятника
Математический маятник совершает колебания, которые можно описать простым дифференциальным уравнением:
где х (t) – неизвестная функция (это угол отклонения от нижнего положения равновесия в момент t, выраженный в радианах); ω – положительная константа, которая определяется из параметров маятника (ω = √g/L, где g – это ускорение свободного падения, а L – длина математического маятника (подвес).
Уравнение малых колебаний вблизи положення равновесия (гармоническое уравнение) выглядит так:
Колебательные движения маятника
Математический маятник, который совершает малые колебания, двигается по синусоиде. Дифференциальное уравнение второго порядка отвечает всем требованиям и параметрам такого движения. Для определения траектории необходимо задать скорость и координату, из которых потом определяются независимые константы:
где θ0 – начальная фаза, A – амплитуда колебания, ω – циклическая частота, определяемая из уравнения движения.
Математический маятник (формулы для больших амплитуд)
Данная механическая система, совершающая свои колебания со значительной амплитудой, подчиняется более сложным законам движения. Для такого маятника они рассчитываются по формуле:
sin x/2 = u * sn(ωt/u),
где sn — синус Якоби, который для u 2 августа, 2014
Пружинные и математические маятники в физике — виды, формулы и определения с примерами
Содержание:
Пружинные и математические маятники:
Тело или система тел, совершающие периодические колебательные движения, называются маятниками. Большинство колебательных движений, встречающихся в природе, напоминают движение пружинных и математических маятников.
Система, состоящая из груза массой 

Если немножко растянуть пружину и отпустить, то груз придет в колебательное движение в вертикальном направлении.
С помощью опытов мы определили, что смещение груза в зависимости от времени изменяется следующbм образом:
Если учесть, что ускорение тела, совершающего гармонические колебания  , то уравнение (5.10) примет вид:
, то уравнение (5.10) примет вид:
Из этого уравнения мы имеем:

Значит, частота циклического колебания тела, совершающего гармоническое колебание, зависит от параметров тел, входящих в систему колебания. Формула (5.12) называется формулой для
определения циклической (периодической) частоты пружинного маятника .
.
Период колебания пружинного маятника прямо пропорционален выведенному из-под квадратного корня значению массы груза и обратно пропорционален выведенному из-под квадратного корня значению упругости пружины.
Рассмотрим обмен энергиями в пружинном маятнике. Кинетическая энергия маятника, если не учитывать массу пружины, равна кинетической энергии груза,  . В предыдущих темах было показано, что скорость можно выразить формулой
. В предыдущих темах было показано, что скорость можно выразить формулой  . В таком случае кинетическая энергия маятника равна
. В таком случае кинетическая энергия маятника равна

Потенциальная энергия пружинного маятника равна энергии деформации пружины, т.е.:

В большинстве случаев важно знать полную энергию системы:

Если учесть, что  ,
,


Обратите внимание, что полная энергия пружинного маятника является постоянной величиной, не зависящей от времени, т.е. соблюдается выполнение закона сохранения механической энергии.
Материальная точка, подвешенная на нерастяжимой и невесомой нити и совершающая периодическое колебательное движение вокруг равновесного состояния, называется математическим маятником.
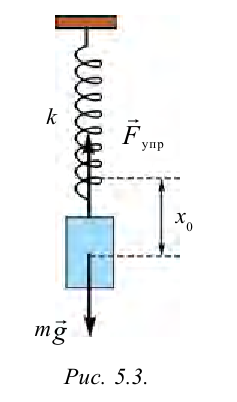
Когда маятник находится в устойчивом равновесном состоянии, вес материальной точки  уравновешивает силу натяжения
уравновешивает силу натяжения  (рис. 5.4), так как их модули равны и направлены по одной линии в противоположные стороны. Если наклонить маятник на угол
(рис. 5.4), так как их модули равны и направлены по одной линии в противоположные стороны. Если наклонить маятник на угол  , силы
, силы  и не смогут уравновесить друг друга из-за взаимного расположения под углом. В результате сложения таких сил появится возвращающая сила, которая вернет маятник в равновесное состояние. Если отпустить маятник, то под воздействием возвращающей силы он начинает двигаться в сторону равновесного состояния.
и не смогут уравновесить друг друга из-за взаимного расположения под углом. В результате сложения таких сил появится возвращающая сила, которая вернет маятник в равновесное состояние. Если отпустить маятник, то под воздействием возвращающей силы он начинает двигаться в сторону равновесного состояния.
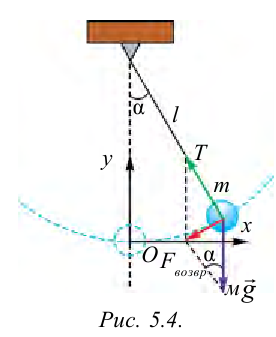
Из рис. 5.4. видим, что:

Согласно второму закону Ньютона, сила  придает материальной точке ускорение
придает материальной точке ускорение  , поэтому
, поэтому

Из-за того, что угол наклона очень маленький  , а сила
, а сила  направлена противоположно смещению, формулу (5.19) можно записать в виде
направлена противоположно смещению, формулу (5.19) можно записать в виде

Если смещение материальной точки (шарика) во время колебательного процесса отметить буквой  и учитывать соотношение
и учитывать соотношение  , получим
, получим 
Следовательно 
Исходя из смысла периода колебания и учитывая, что  получаем
получаем

Эта формула, определяющая период колебания математического маятника, называется формулой Гюйгенса. Отсюда вытекают следующие законы математического маятника:
- при маленьких углах наклона (а) математического маятника, его период колебания не зависит от амплитуды колебания.
- период колебания математического маятника также не зависит от массы подвешенного на него груза;
- период колебания математического маятника прямо пропорционален выведенному из-под квадратного корня значению длины маятника и обратно пропорционален выведенному из-под квадратного корня значению ускорения свободного падения.
Отсюда колебание математического маятника записывается следующим выражением:
Следует отметить, что когда амплитуда колебания или угол наклона велики, колебания математического маятника не являются гармоническим. В этом случае нельзя считать  и для решения уравнения движения не применяется закон синусов или косинусов.
и для решения уравнения движения не применяется закон синусов или косинусов.
Пример:
Период колебания первого маятника равен 3 сек, второго – 4 сек. Найдите период колебания маятника с длиной, равной сумме длин этих маятников.

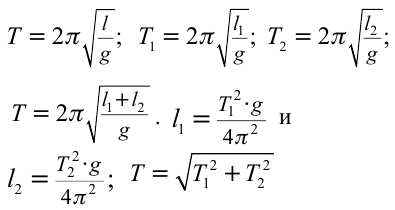
Решение: 
Ответ: 5 cек.
Пружинный и математический маятники
Второй закон Ньютона (основной закон динамики): ускорение, приобретаемое материальной точкой, прямо пропорционально равнодействующей всех сил, действующих на нее, и обратно пропорционально массе материальной точки:
Закон Гука: модуль силы упругости  , возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию)
, возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию)  :
:

где k — жесткость тела,  — длина недеформированного тела, l — длина деформированного тела.
— длина недеформированного тела, l — длина деформированного тела.
Рассмотрим пружинный маятник, представляющий собой колебательную систему, образованную грузом на пружине.
Пусть груз массой т, лежащий на гладкой горизонтальной поверхности, прикреплен к свободному концу невесомой пружины жесткостью k (рис. 3). Второй конец пружины закреплен относительно данной инерциальной системы отсчета (ИСО).
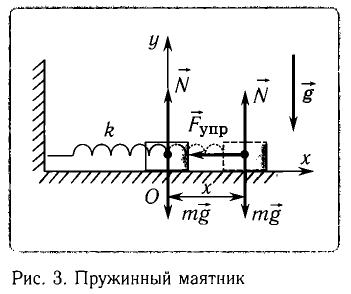
Выведем груз из положения равновесия, сместив его на расстояние х вправо. В пружине возникнет сила упругости  направленная влево.
направленная влево.
Запишем второй закон Ньютона для движения груза:

В проекции на ось Ох действующих на груз сил с учетом закона Гука получаем
 или
или 
Это уравнение аналогично уравнению гармонических колебаний
Сравнивая эти два уравнения, находим циклическую частоту колебаний пружинного маятника:
Тогда период колебаний пружинного маятника можно найти по формуле
Как следует из полученной формулы, период колебаний пружинного маятника не зависит от амплитуды его колебаний (в пределах выполнимости закона Гука).
Свойство независимости периода колебаний маятника от амплитуды называется изохронностью (от греческих слов  , — равный и
, — равный и  — время). Таким образом, колебания пружинного маятника обладают свойством изохронности.
— время). Таким образом, колебания пружинного маятника обладают свойством изохронности.
Изохронность колебаний маятника была открыта Галилео Галилеем в 1583 г. при изучении движения грузика, подвешенного на нити. Моделью данной колебательной системы является математический маятник.
Математическим маятником называется материальная точка массой т, подвешенная на невесомой нерастяжимой нити длиной l в поле каких-либо сил, например силы тяжести Земли (рис. 4).
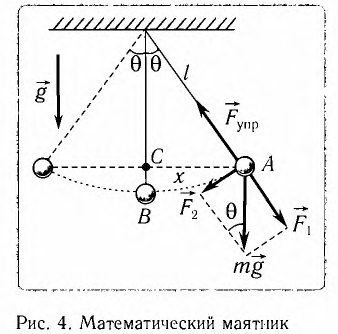
Математический маятник — это идеализированная модель реального маятника при условии, что длина нити намного больше размеров подвешенного на ней тела и масса нити намного меньше массы тела. Кроме того, деформацией нити можно пренебречь.
Галилео Галилей экспериментально определил, что период малых колебаний (9
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://fb.ru/article/148323/matematicheskiy-mayatnik-period-uskorenie-i-formulyi
http://www.evkova.org/pruzhinnyie-i-matematicheskie-mayatniki-v-fizike
В своей основе физика является наукой экспериментальной и в этом ее сила. Однако без осмысления большого количества опытных фактов физика выродилась бы в описание огромного количества явлений и процессов. Так появились физические законы и соответствующие им модели, которые абстрагируются от несущественных черт рассматриваемого предмета. В последние десятилетия отмечается бурный прогресс в такой области как компьютерное моделирование или, как стало общепринято говорить, компьютерный эксперимент. Дело в том, что разработанные физические модели можно напрямую реализовать в виде вычислительного процесса на компьютере и исследовать интересуемые закономерности. В данной работе мы с вами выполним такой компьютерный эксперимент для хорошо известной системы как математический маятник.
Хорошо известна формула для периода колебаний математического маятника длины $l$, находящегося в однородном поле тяжести Земли, характеризуемом ускорением свободного падения $g$. Однако, эта формула применима только при малых углах отклонения. Основной вопрос, на который вам предстоит ответить при выполнении этой работы: «Какой угол отклонения можно считать малым?»
В учебной литературе, посвященной лабораторным практикумам, можно встретить указание о том, что максимальный угол отклонения не должен превышать $1^circ, 2^circ, 5^circ$ и т. д. На поставленный выше вопрос вы должны ответить на основании компьютерного эксперимента! А именно, вам предлагается изучить зависимость периода колебаний математического маятника от его амплитуды, в качестве которой принимается максимальный угол отклонения от вертикали.
Схема проведения и обработки результатов компьютерного эксперимента мало отличаются от проведения обычного, натурного эксперимента. Поэтому части данной задачи напрямую соответствуют основным этапам реального физического эксперимента.
Часть 1. Построение теоретической модели
Рассмотрим математический маятник, представляющий собой небольшой массивный шарик, подвешенный на нерастяжимой нити длиной $l$. Маятник находится в поле тяжести с ускорением свободного падения $g$. Сопротивлением воздуха будем пренебрегать.

1.1
Запишите формулу для периода $T$ малых колебаний математического маятника.
Пусть в начальный момент времени $t_{0} =0$ угол отклонения нити от вертикали составляет $varphi _{0} $, а начальная скорость шарика равна нулю. Шарик движется по дуге окружности, поэтому его положение будем определять углом отклонения нити от вертикали $varphi $, а скорость изменения этого угла определяется угловой скоростью $omega =cfrac{dvarphi }{dt} $.
1.2
Получите точную формулу для зависимости угловой скорости движения маятника от угла отклонения $omega left(varphi right)$ при заданной амплитуде колебаний $varphi _{0} $ и известных значениях $l, g$.
Так как движение маятника является симметричным относительно вертикали, то для расчета периода колебаний достаточно рассчитать время $t_{1} $ его движения от максимального отклонения $varphi _{0} $ до нуля.
1.3
Запишите точное выражение для расчета времени $t_{1} $ по известной зависимости угловой скорости от угла отклонения $omega left(varphi right)$.
1.4
Выразите период колебаний $T$ через время $t_{1} $.
В компьютерном эксперименте при выполнении расчетов никогда не используются реальные размерные величины, так как они могут иметь самые разные порядки и являются крайне неудобными. Обычно применяют так называемую процедуру обезразмеривания величин на некоторые характерные для данной задачи значения. Например, в нашей задаче характерным временем является период колебаний, поэтому удобно ввести безразмерное время $tau$, которое определяется по формуле:
$$tau =tsqrt{frac{g}{l} }$$
1.5
Запишите формулу, связывающую угловую скорость в безразмерных единицах $widetilde{omega }=cfrac{dvarphi }{dtau } $ с ранее введенной угловой скоростью $omega $.
1.6
Определите период малых колебаний $widetilde{T}$ математического маятника в безразмерных единицах времени.
1.7
Определите зависимость угловой скорости $widetilde{omega }$ от угла отклонения $varphi $: $widetilde{omega }left(varphi right)$.
Далее везде используются введенные безразмерные величины: время $tau $, период $widetilde{T}$ и угловую скорость $widetilde{omega }$, которые будем обозначать $t$, $T$ и $omega $.
Часть 2. Конструирование экспериментальной установки, планирование эксперимента
В компьютерном эксперименте этому этапу соответствует разработка алгоритма проведения расчетов. В данном случае основная идея численных (компьютерных) расчетов заключается в разбиении траектории движения на малые участки, на каждом из которых движение описывается приближенно.
Разобьем интервал движения от $varphi =varphi _{0} $ до $varphi =0$ на $N$ одинаковых интервалов шириной $Delta varphi $. Обозначим точки разбиения как $varphi _{k} $, $k=0, 1,dots N$, а угловые скорости в этих точках как $omega _{k} $. Основное приближение, используемое в дальнейших расчетах, состоит в том, что на каждом интервале от $varphi _{k} $ до $varphi _{k+1} $ движение маятника считается равноускоренным. Естественно ожидать, что с увеличением числа интервалов разбиения $N$ точность расчетов будет возрастать.
В рамках сделанного приближения не сложно найти время движения маятника на интервале от $varphi _{0} $ до 0. Алгоритм расчетов при заданных вами значениях амплитуды $varphi _{0} $ и числа интервалов разбиения $N$ раскрывается в последовательности ответов на следующие вопросы.

2.1
Определите интервал разбиения $Delta varphi $.
2.2
Определите координаты точек разбиения $varphi _{k} $.
2.3
Выразите угловую скорость $omega _{k} $ в точке $varphi _{k} $ при произвольном начальном угле отклонения $varphi _{0} $. Запишите эту формулу для частного случая $varphi _{0} =cfrac{pi }{2} $.
2.4
Определите время $Delta t_{k} $ прохождения $k$-того интервала от $varphi _{k-1} $ до $varphi _{k} $.
2.5
Найдите выражение для времени $t_{k} $ прохождения шарика до угла $varphi _{k} $. Для упрощения расчетов выразите его через время $t_{k-1} $ прохождения до предыдущего значения угла $varphi _{k-1} $.
2.6
Приведите формулу для периода колебаний $T_{N} $ при заданном разбиении на $N$ интервалов.
Часть 3. Пробный эксперимент, оценка погрешностей
На этом этапе необходимо убедиться в работоспособности установки, что в данном случае означает возможность проведения расчетов по разработанному выше алгоритму, а также оценить, достигается ли необходимая точность результатов.
Как было отмечено ранее, погрешности расчетов зависят от числа интервалов разбиения $N$. В данном задании вам предстоит проводить расчеты не на компьютере, а «вручную», с помощью калькулятора. Увеличение $N$ уменьшает погрешность расчетов, но увеличивает время их проведения. Поэтому важно выбрать оптимальное значение этой величины — минимальное значение, при котором достигается требуемая точность. На данном этапе все расчеты проводите для $varphi _{0} =cfrac{pi }{2} $.
ВНИМАНИЕ! Здесь и далее расчеты следует проводить с точностью до 4 десятичных знаков. Для экономии времени тщательно продумывайте всю последовательность расчетов: используйте ранее рассчитанные величины, вводите необходимые константы, присутствующие в формулах (чтобы не пересчитывать их несколько раз), записывайте результаты промежуточных расчетов в наиболее удобном виде.
3.1
Проведите расчеты времен $t_{k} $ прохождения точек с координатами $varphi _{k} $ для $N=1, 2, 4, 8, 16, 32$. Найдите приближенные значения периодов колебаний $T_{N} $, рассчитанные по $N$ точкам. Результаты представьте в Таблице 1.
3.2
Постройте График 1 закона движения маятника $varphi (t)$ за четверть периода по результатам расчетов при $N=16$.
3.3
На том же Графике 1 постройте закон движения $varphi (t)$, считая, что колебания являются малыми. Результаты расчетов закона движения приведите в Таблице 2.
В качестве оценки относительной погрешности расчета периода колебаний при разбиении на $N$ интервалов используем величину
$$varepsilon _{N} =cfrac{T_{N} -T_{32} }{T_{32} } ,$$
где $T_{32} $ — значение периода, рассчитанное для $N=32$, что наиболее близко к истинному значению.
Зависимость относительной погрешности расчета $varepsilon _{N} $ от числа разбиений $N$ описывается приближенной формулой
$$varepsilon _{N} =frac{C}{N^{gamma } } ,$$
где $C$ и $gamma $ — некоторые постоянные величины.
3.4
Рассчитайте относительные погрешности определения периодов $varepsilon _{N} $. Результаты представьте в Таблице 3.
3.5
Докажите на Графике 2 применимость приведенной выше формулы для относительной погрешности и найдите значения параметров $C$ и $gamma $.
3.6
Определите минимальное значение $N_{min } $, при котором относительная погрешность расчета периода не превышает 0.2%.
В дальнейших расчетах используйте найденное значение числа интервалов разбиения $N_{min } $.
Часть 4. Эксперимент: зависимость периода от амплитуды
На этом этапе компьютерного эксперимента определим зависимость периода колебаний математического маятника от амплитуды $Tleft(varphi _{0} right)$, которая описывается функцией
$$Tleft(varphi _{0} right)=T_{0} left(a+cfrac{varphi _{0}^{2} }{b} right),$$
где $T_{0} $ — период малых колебаний маятника, $a, b$ — постоянные величины.
4.1
Рассчитайте периоды колебаний математического маятника для следующего набора амплитуд $varphi _{0} $: $15^circ ,30^circ ,45^circ ,60^circ ,75^circ $ и $90^circ $, который вы уже определили.
4.2
Докажите на Графике 3 применимость приведенной выше формулы для зависимости периода колебаний маятника от его амплитуды.
4.3
Определите значения параметров $a,b$.
Пусть погрешность измерения периода колебаний маятника в реальном эксперименте составляет примерно $5%$.
4.4
Обоснуйте, при каких углах $varphi _{0} $, выраженных в градусах, колебания математического маятника можно считать малыми.