Как найти угол отклонения маятника
Математическим маятником называют тело небольших размеров, подвешенное на тонкой нерастяжимой нити, масса которой пренебрежимо мала по сравнению с массой тела. В положении равновесия, когда маятник висит по отвесу, сила тяжести уравновешивается силой натяжения нити При отклонении маятника из положения равновесия на некоторый угол появляется касательная составляющая силы тяжести (рис. 2.3.1). Знак «минус» в этой формуле означает, что касательная составляющая направлена в сторону, противоположную отклонению маятника.
Если обозначить через линейное смещение маятника от положения равновесия по дуге окружности радиуса , то его угловое смещение будет равно . Второй закон Ньютона, записанный для проекций векторов ускорения и силы на направление касательной, дает:
Это соотношение показывает, что математический маятник представляет собой сложную нелинейную систему, так как сила, стремящаяся вернуть маятник в положение равновесия, пропорциональна не смещению , а
Только в случае малых колебаний , когда приближенно можно заменить на математический маятник является гармоническим осциллятором , т. е. системой, способной совершать гармонические колебания. Практически такое приближение справедливо для углов порядка ; при этом величина отличается от не более чем на . Колебания маятника при больших амплитудах не являются гармоническими.
Для малых колебаний математического маятника второй закон Ньютона записывается в виде
Таким образом, тангенциальное ускорение маятника пропорционально его смещению , взятому с обратным знаком. Это как раз то условие, при котором система является гармоническим осциллятором. По общему правилу для всех систем, способных совершать свободные гармонические колебания, модуль коэффициента пропорциональности между ускорением и смещением из положения равновесия равен квадрату круговой частоты:
Эта формула выражает собственную частоту малых колебаний математического маятника .
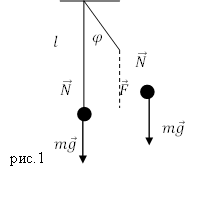
Любое тело, насаженное на горизонтальную ось вращения, способно совершать в поле тяготения свободные колебания и, следовательно, также является маятником. Такой маятник принято называть физическим (рис. 2.3.2). Он отличается от математического только распределением масс. В положении устойчивого равновесия центр масс физического маятника находится ниже оси вращения на вертикали, проходящей через ось. При отклонении маятника на угол возникает момент силы тяжести, стремящийся возвратить маятник в положение равновесия:
Здесь – расстояние между осью вращения и центром масс .
Здесь – собственная частота малых колебаний физического маятника .
Более строгий вывод формул для и можно сделать, если принять во внимание математическую связь между угловым ускорением и угловым смещением: угловое ускорение есть вторая производная углового смещения по времени:
Поэтому уравнение, выражающее второй закон Ньютона для физического маятника, можно записать в виде
Это уравнение свободных гармонических колебаний (см. уравнение (*) §2.2). Коэффициент в этом уравнении имеет смысл квадрата круговой частоты свободных гармонических колебаний физического маятника.
По теореме о параллельном переносе оси вращения (теорема Штейнера) момент инерции можно выразить через момент инерции относительно оси, проходящей через центр масс маятника и параллельной оси вращения:
Окончательно для круговой частоты свободных колебаний физического маятника получается выражение:
Математический маятник
Математический маятник – это модель системы, совершающей гармонические колебания. Свободные колебания математического маятника при малых углах отклонения описываются уравнением гармонических колебаний.
В положении равновесия сила тяжести и сила упругости нити уравновешивают друг друга, и материальная точка находится в покое. При отклонении материальной точки от положения равновесия на малый угол  на тело будет действовать возвращающая сила
на тело будет действовать возвращающая сила  , которая является тангенциальной составляющей силы тяжести:
, которая является тангенциальной составляющей силы тяжести:
![[F=mgsin alpha ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-62c0be923a854cd22cc64c05c3d93e05_l3.png)
Эта сила сообщает материальной точке тангенциальное ускорение, направленное по касательной к траектории, и материальная точка начинает двигаться к положению равновесия с возрастающей скоростью. По мере приближения к положению равновесия возвращающая сила, а следовательно, и тангенциальное ускорение точки, уменьшаются. В момент прохождения положения равновесия угол отклонения  , тангенциальное ускорение также равно нулю, а скорость материальной точки максимальна. Далее материальная точка проходит по инерции положение равновесия и, двигаясь в направлении, противоположном силе , сбавляет скорость. В крайнем положении материальная точка останавливается, и затем начинает двигаться в обратном направлении.
, тангенциальное ускорение также равно нулю, а скорость материальной точки максимальна. Далее материальная точка проходит по инерции положение равновесия и, двигаясь в направлении, противоположном силе , сбавляет скорость. В крайнем положении материальная точка останавливается, и затем начинает двигаться в обратном направлении.
Период колебаний математического маятника
![[T=2pi sqrt{frac{l}{g}} ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-f94e775e57dc29864031f59536d37b71_l3.png)
Период колебаний математического маятника не зависит от массы груза и амплитуды колебаний.
Примеры решения задач
| Задание | Математический маятник длиной 1 м колеблется с амплитудой 1 см. За какое время он пройдет путь равный 1 см, если в начальный момент времени маятник проходит положение равновесия? За какое время маятник пройдет: а) первую половину этого пути; б) вторую половину этого пути? |
| Решение | Период колебаний математического маятника определяется формулой: |
Ускорение свободного падения  м/с
м/с
![[T=2pi sqrt{frac{1}{9,8}}=2 c]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-6e54a4de984f09ecb417da388da3e4dd_l3.png)
Математический маятник совершает гармонические колебания, поэтому смещение материальной точки зависит от времени по гармоническому закону:
![[x=Asin left(omega t+{varphi }_0right)]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-2b5c88891010d9bc68a53be5cbf1ed72_l3.png)
Так как в начальный момент времени маятник проходит положение равновесия, начальная фаза колебаний равна нулю.
![[omega =frac{2pi }{T},]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-e71ea5699aac7ec523ee9a9fb6dfaf7b_l3.png)
![[omega =frac{2pi }{2}=pi rad/c]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-b43699c85c3e26176bed3d0520a67e20_l3.png)
Путь, равный 1 см, т.е. равный в данном случае амплитуде колебаний, маятник пройдет за четверть периода, т.е. за 0,5 с.
а) В данном случае смещение:
![[x=frac{A}{2},]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-0439ee99ccca324fd91703a72ed1480c_l3.png)
поэтому можно записать:
![[frac{A}{2}=Asin pi t;]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-3d784e7560c6d9039632b7cd7632b8ec_l3.png)
![[sin pi t=frac{1}{2};]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-8914388884059fdad05c3ee1955b22a7_l3.png)
![[pi t=text{arcsin} left(frac{1}{2}right)=frac{pi }{6};]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-15e16478fc3cdcbf4f40dce5fb868d1e_l3.png)
![[t=frac{1}{6}=0,17 c]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-3cc3844b6ec3fdaae6af2ccf9ef7e080_l3.png)
б) Если на прохождение всего пути, равного амплитуде, маятник тратит 0,5 с, а на прохождение его первой половины – 0,17 с, на вторую половину пути маятник затратит:
Формулы математического маятника
Математический маятник — это колебательная система, являющаяся частным случаем физического маятника, вся масса которого сосредоточена в одной точке, центре масс маятника.
Обычно математический маятник представляют как шарик, подвешенный на длинной невесомой и нерастяжимой нити. Это идеализированная система, совершающая гармонические колебания под действием силы тяжести. Хорошим приближением к математическому маятнику массивный маленький шарик, осуществляющий колебания на тонкой длинной нити.
Галилей первым изучал свойства математического маятника, рассматривая качание паникадила на длинной цепи. Он получил, что период колебаний математического маятника не зависит от амплитуды. Если при запуске мятника отклонять его на разные малые углы, то его колебания будут происходить с одним периодом, но разными амплитудами. Это свойство получило название изохронизма.
Уравнение движения математического маятника
Математический маятник — классический пример гармонического осциллятора. Он совершает гармонические колебания, которые описываются дифференциальным уравнением:
где $varphi $ — угол отклонения нити (подвеса) от положения равновесия.
Решением уравнения (1) является функция $varphi (t):$
где $alpha $ — начальная фаза колебаний; $_0$ — амплитуда колебаний; $_0$ — циклическая частота.
Колебания гармонического осциллятора — это важный пример периодического движения. Осциллятор служит моделью во многих задачах классической и квантовой механики.
Циклическая частота и период колебаний математического маятника
Циклическая частота математического маятника зависит только от длины его подвеса:
Период колебаний математического маятника ($T$) в этом случае равен:
Выражение (4) показывает, что период математического маятника зависит только от длины его подвеса (расстояния от точки подвеса до центра тяжести груза) и ускорения свободного падения.
Уравнение энергии для математического маятника
При рассмотрении колебаний механических систем с одной степенью свободы часто берут в качестве исходного не уравнения движения Ньютона, а уравнение энергии. Так как его проще составлять, и оно является уравнением первого порядка по времени. Предположим, что трение в системе отсутствует. Закон сохранения энергии для совершающего свободные колебания математического маятника (колебания малые) запишем как:
где $E_k$ — кинетическая энергия маятника; $E_p$ — потенциальная энергия маятника; $v$ — скорость движения маятника; $x$ — линейное смещение груза маятника от положения равновесия по дуге окружности радиуса $l$, при этом угол — смещение связан с $x$ как:
Максимальное значение потенциальной энергии математического маятника равно:
Максимальная величина кинетической энергии:
где $h_m$ — максимальная высота подъема маятника; $x_m$- максимальное отклонение маятника от положения равновесия; $v_m=_0x_m$ — максимальная скорость.
Примеры задач с решением
Задание. Какова максимальная высота подъема шарика математического маятника, если его скорость движения при прохождении положения равновесия составляла $v$?
Решение. Сделаем рисунок.
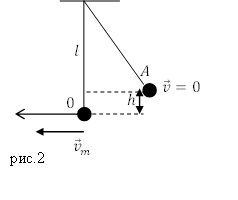
Пусть ноль потенциальной энергии шарика в его положении равновесия (точка 0).В этой точке скорость шарика максимальна и равна по условию задачи $v$. В точке максимального подъема шарика над положением равновесия (точка A), скорость шарика равна нулю, потенциальная энергия максимальна. Запишем закон сохранения энергии для рассмотренных двух положений шарика:
Из уравнения (1.1) найдем искомую высоту:
Ответ. $h=frac$
Задание. Каково ускорение силы тяжести, если математический маятник имеющий длину $l=1 м$, совершает колебания с периодом равным $T=2 с$? Считайте колебания математического маятника малыми.textit
Решение. За основу решения задачи примем формулу для вычисления периода малых колебаний:
Формулы математического маятника
Определение и формулы математического маятника
Математический маятник — это колебательная система, являющаяся частным случаем физического маятника, вся масса которого сосредоточена в одной точке, центре масс маятника.
Обычно математический маятник представляют как шарик, подвешенный на длинной невесомой и нерастяжимой нити. Это идеализированная система, совершающая гармонические колебания под действием силы тяжести. Хорошим приближением к математическому маятнику массивный маленький шарик, осуществляющий колебания на тонкой длинной нити.
Галилей первым изучал свойства математического маятника, рассматривая качание паникадила на длинной цепи. Он получил, что период колебаний математического маятника не зависит от амплитуды. Если при запуске мятника отклонять его на разные малые углы, то его колебания будут происходить с одним периодом, но разными амплитудами. Это свойство получило название изохронизма.
Уравнение движения математического маятника
Математический маятник — классический пример гармонического осциллятора. Он совершает гармонические колебания, которые описываются дифференциальным уравнением:
где $varphi $ — угол отклонения нити (подвеса) от положения равновесия.
Решением уравнения (1) является функция $varphi (t):$
где $alpha $ — начальная фаза колебаний; $<varphi >_0$ — амплитуда колебаний; $<omega >_0$ — циклическая частота.
Колебания гармонического осциллятора — это важный пример периодического движения. Осциллятор служит моделью во многих задачах классической и квантовой механики.
Циклическая частота и период колебаний математического маятника
Циклическая частота математического маятника зависит только от длины его подвеса:
Период колебаний математического маятника ($T$) в этом случае равен:
Выражение (4) показывает, что период математического маятника зависит только от длины его подвеса (расстояния от точки подвеса до центра тяжести груза) и ускорения свободного падения.
Уравнение энергии для математического маятника
При рассмотрении колебаний механических систем с одной степенью свободы часто берут в качестве исходного не уравнения движения Ньютона, а уравнение энергии. Так как его проще составлять, и оно является уравнением первого порядка по времени. Предположим, что трение в системе отсутствует. Закон сохранения энергии для совершающего свободные колебания математического маятника (колебания малые) запишем как:
где $E_k$ — кинетическая энергия маятника; $E_p$ — потенциальная энергия маятника; $v$ — скорость движения маятника; $x$ — линейное смещение груза маятника от положения равновесия по дуге окружности радиуса $l$, при этом угол — смещение связан с $x$ как:
Максимальное значение потенциальной энергии математического маятника равно:
Максимальная величина кинетической энергии:
где $h_m$ — максимальная высота подъема маятника; $x_m$- максимальное отклонение маятника от положения равновесия; $v_m=<omega >_0x_m$ — максимальная скорость.
Примеры задач с решением
Задание. Какова максимальная высота подъема шарика математического маятника, если его скорость движения при прохождении положения равновесия составляла $v$?
Решение. Сделаем рисунок.
Пусть ноль потенциальной энергии шарика в его положении равновесия (точка 0).В этой точке скорость шарика максимальна и равна по условию задачи $v$. В точке максимального подъема шарика над положением равновесия (точка A), скорость шарика равна нулю, потенциальная энергия максимальна. Запишем закон сохранения энергии для рассмотренных двух положений шарика:
Из уравнения (1.1) найдем искомую высоту:
Ответ. $h=frac<2g>$
Задание. Каково ускорение силы тяжести, если математический маятник имеющий длину $l=1 м$, совершает колебания с периодом равным $T=2 с$? Считайте колебания математического маятника малыми.textit<>
Решение. За основу решения задачи примем формулу для вычисления периода малых колебаний:
Выразим из нее ускорение:
Проведем вычисления ускорения силы тяжести:
Ответ. $g=9,87 frac<м><с^2>$
Математический маятник: период, ускорение и формулы
Механическая система, которая состоит из материальной точки (тела), висящей на нерастяжимой невесомой нити (ее масса ничтожно мала по сравнению с весом тела) в однородном поле тяжести, называется математическим маятником (другое название – осциллятор). Бывают и другие виды этого устройства. Вместо нити может быть использован невесомый стержень. Математический маятник может наглядно раскрыть суть многих интересных явлений. При малой амплитуде колебания его движение называется гармоническим.
Общие сведения о механической системе

Если маятник находится в положении равновесия (висит отвесно), то сила тяжести будет уравновешиваться силой натяжения нити. Плоский маятник на нерастяжимой нити является системой с двумя степенями свободы со связью. При смене всего одного компонента меняются характеристики всех ее частей. Так, если нитку заменить на стержень, то у данной механической системы будет всего 1 степень свободы. Какими же свойствами обладает математический маятник? В этой простейшей системе под воздействием периодического возмущения возникает хаос. В том случае, когда точка подвеса не двигается, а совершает колебания, у маятника появляется новое положение равновесия. При быстрых колебаниях вверх-вниз эта механическая система приобретает устойчивое положение «вверх тормашками». У нее есть и свое название. Ее называют маятником Капицы.
Свойства маятника
• Если, сохраняя одинаковую длину маятника, подвешивать различные грузы, то период их колебаний получится одинаковым, хотя их массы будут сильно различаться. Следовательно, период такого маятника не зависит от массы груза.
• Если при запуске системы отклонять маятник на не слишком большие, но разные углы, то он станет колебаться с одинаковым периодом, но по разным амплитудам. Пока отклонения от центра равновесия не слишком велики, колебания по своей форме будут достаточно близки гармоническим. Период такого маятника никак не зависит от колебательной амплитуды. Это свойство данной механической системы называется изохронизмом (в переводе с греческого «хронос» — время, «изос» — равный).
Период математического маятника
Этот показатель представляет собой период собственных колебаний. Несмотря на сложную формулировку, сам процесс очень прост. Если длина нити математического маятника L, а ускорение свободного падения g, то эта величина равна:
Период малых собственных колебаний ни в какой мере не зависит от массы маятника и амплитуды колебаний. В этом случае маятник двигается как математический с приведенной длиной.
Колебания математического маятника
Математический маятник совершает колебания, которые можно описать простым дифференциальным уравнением:
где х (t) – неизвестная функция (это угол отклонения от нижнего положения равновесия в момент t, выраженный в радианах); ω – положительная константа, которая определяется из параметров маятника (ω = √g/L, где g – это ускорение свободного падения, а L – длина математического маятника (подвес).
Уравнение малых колебаний вблизи положення равновесия (гармоническое уравнение) выглядит так:
Колебательные движения маятника
Математический маятник, который совершает малые колебания, двигается по синусоиде. Дифференциальное уравнение второго порядка отвечает всем требованиям и параметрам такого движения. Для определения траектории необходимо задать скорость и координату, из которых потом определяются независимые константы:
где θ0 – начальная фаза, A – амплитуда колебания, ω – циклическая частота, определяемая из уравнения движения.
Математический маятник (формулы для больших амплитуд)
Данная механическая система, совершающая свои колебания со значительной амплитудой, подчиняется более сложным законам движения. Для такого маятника они рассчитываются по формуле:
sin x/2 = u * sn(ωt/u),
где sn — синус Якоби, который для u 2 августа, 2014
Пружинные и математические маятники в физике — виды, формулы и определения с примерами
Содержание:
Пружинные и математические маятники:
Тело или система тел, совершающие периодические колебательные движения, называются маятниками. Большинство колебательных движений, встречающихся в природе, напоминают движение пружинных и математических маятников.
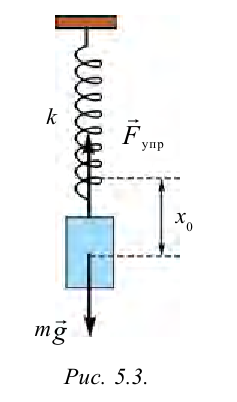
Система, состоящая из груза массой 

Если немножко растянуть пружину и отпустить, то груз придет в колебательное движение в вертикальном направлении.
С помощью опытов мы определили, что смещение груза в зависимости от времени изменяется следующbм образом:
Если учесть, что ускорение тела, совершающего гармонические колебания  , то уравнение (5.10) примет вид:
, то уравнение (5.10) примет вид:
Из этого уравнения мы имеем:

Значит, частота циклического колебания тела, совершающего гармоническое колебание, зависит от параметров тел, входящих в систему колебания. Формула (5.12) называется формулой для
определения циклической (периодической) частоты пружинного маятника .
.
Период колебания пружинного маятника прямо пропорционален выведенному из-под квадратного корня значению массы груза и обратно пропорционален выведенному из-под квадратного корня значению упругости пружины.
Рассмотрим обмен энергиями в пружинном маятнике. Кинетическая энергия маятника, если не учитывать массу пружины, равна кинетической энергии груза,  . В предыдущих темах было показано, что скорость можно выразить формулой
. В предыдущих темах было показано, что скорость можно выразить формулой  . В таком случае кинетическая энергия маятника равна
. В таком случае кинетическая энергия маятника равна

Потенциальная энергия пружинного маятника равна энергии деформации пружины, т.е.:

В большинстве случаев важно знать полную энергию системы:

Если учесть, что  ,
,


Обратите внимание, что полная энергия пружинного маятника является постоянной величиной, не зависящей от времени, т.е. соблюдается выполнение закона сохранения механической энергии.
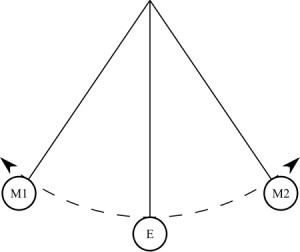
Материальная точка, подвешенная на нерастяжимой и невесомой нити и совершающая периодическое колебательное движение вокруг равновесного состояния, называется математическим маятником.
Когда маятник находится в устойчивом равновесном состоянии, вес материальной точки  уравновешивает силу натяжения
уравновешивает силу натяжения  (рис. 5.4), так как их модули равны и направлены по одной линии в противоположные стороны. Если наклонить маятник на угол
(рис. 5.4), так как их модули равны и направлены по одной линии в противоположные стороны. Если наклонить маятник на угол  , силы
, силы  и не смогут уравновесить друг друга из-за взаимного расположения под углом. В результате сложения таких сил появится возвращающая сила, которая вернет маятник в равновесное состояние. Если отпустить маятник, то под воздействием возвращающей силы он начинает двигаться в сторону равновесного состояния.
и не смогут уравновесить друг друга из-за взаимного расположения под углом. В результате сложения таких сил появится возвращающая сила, которая вернет маятник в равновесное состояние. Если отпустить маятник, то под воздействием возвращающей силы он начинает двигаться в сторону равновесного состояния.
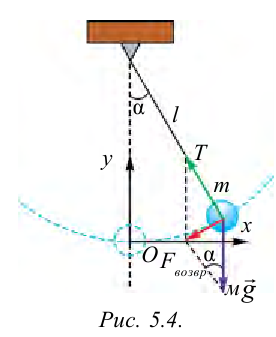
Из рис. 5.4. видим, что:

Согласно второму закону Ньютона, сила  придает материальной точке ускорение
придает материальной точке ускорение  , поэтому
, поэтому

Из-за того, что угол наклона очень маленький  , а сила
, а сила  направлена противоположно смещению, формулу (5.19) можно записать в виде
направлена противоположно смещению, формулу (5.19) можно записать в виде

Если смещение материальной точки (шарика) во время колебательного процесса отметить буквой  и учитывать соотношение
и учитывать соотношение  , получим
, получим 
Следовательно 
Исходя из смысла периода колебания и учитывая, что  получаем
получаем

Эта формула, определяющая период колебания математического маятника, называется формулой Гюйгенса. Отсюда вытекают следующие законы математического маятника:
- при маленьких углах наклона (а) математического маятника, его период колебания не зависит от амплитуды колебания.
- период колебания математического маятника также не зависит от массы подвешенного на него груза;
- период колебания математического маятника прямо пропорционален выведенному из-под квадратного корня значению длины маятника и обратно пропорционален выведенному из-под квадратного корня значению ускорения свободного падения.
Отсюда колебание математического маятника записывается следующим выражением:
Следует отметить, что когда амплитуда колебания или угол наклона велики, колебания математического маятника не являются гармоническим. В этом случае нельзя считать  и для решения уравнения движения не применяется закон синусов или косинусов.
и для решения уравнения движения не применяется закон синусов или косинусов.
Пример:
Период колебания первого маятника равен 3 сек, второго – 4 сек. Найдите период колебания маятника с длиной, равной сумме длин этих маятников.

Решение: 
Ответ: 5 cек.
Пружинный и математический маятники
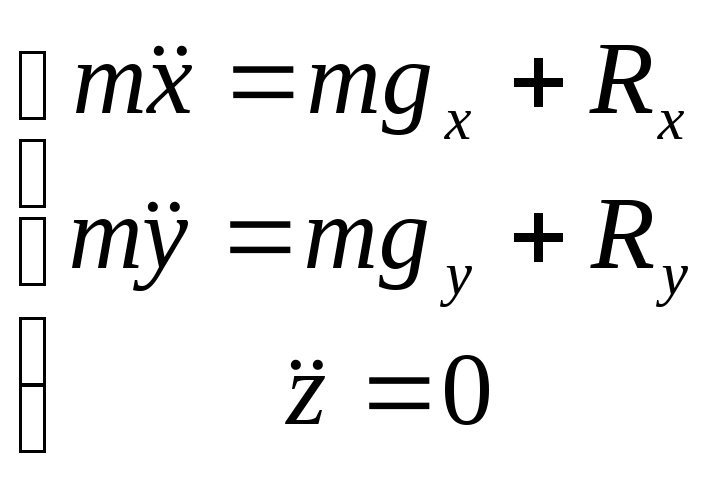
Второй закон Ньютона (основной закон динамики): ускорение, приобретаемое материальной точкой, прямо пропорционально равнодействующей всех сил, действующих на нее, и обратно пропорционально массе материальной точки:
Закон Гука: модуль силы упругости  , возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию)
, возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию)  :
:

где k — жесткость тела,  — длина недеформированного тела, l — длина деформированного тела.
— длина недеформированного тела, l — длина деформированного тела.
Рассмотрим пружинный маятник, представляющий собой колебательную систему, образованную грузом на пружине.
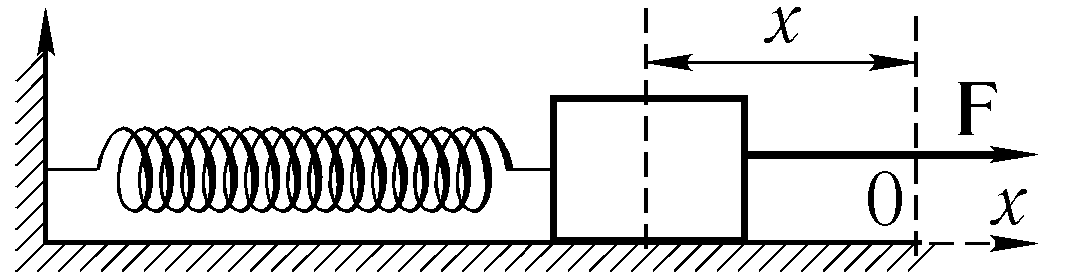
Пусть груз массой т, лежащий на гладкой горизонтальной поверхности, прикреплен к свободному концу невесомой пружины жесткостью k (рис. 3). Второй конец пружины закреплен относительно данной инерциальной системы отсчета (ИСО).
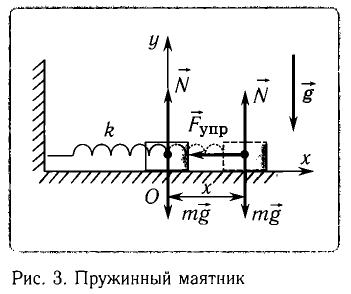
Выведем груз из положения равновесия, сместив его на расстояние х вправо. В пружине возникнет сила упругости  направленная влево.
направленная влево.
Запишем второй закон Ньютона для движения груза:

В проекции на ось Ох действующих на груз сил с учетом закона Гука получаем
 или
или 
Это уравнение аналогично уравнению гармонических колебаний
Сравнивая эти два уравнения, находим циклическую частоту колебаний пружинного маятника:
Тогда период колебаний пружинного маятника можно найти по формуле
Как следует из полученной формулы, период колебаний пружинного маятника не зависит от амплитуды его колебаний (в пределах выполнимости закона Гука).
Свойство независимости периода колебаний маятника от амплитуды называется изохронностью (от греческих слов  , — равный и
, — равный и  — время). Таким образом, колебания пружинного маятника обладают свойством изохронности.
— время). Таким образом, колебания пружинного маятника обладают свойством изохронности.
Изохронность колебаний маятника была открыта Галилео Галилеем в 1583 г. при изучении движения грузика, подвешенного на нити. Моделью данной колебательной системы является математический маятник.
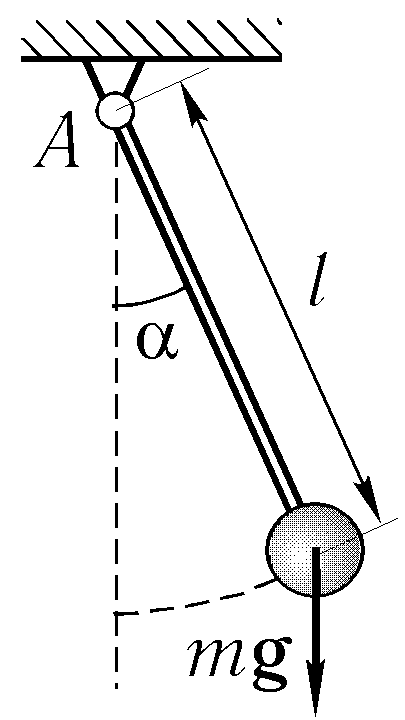
Математическим маятником называется материальная точка массой т, подвешенная на невесомой нерастяжимой нити длиной l в поле каких-либо сил, например силы тяжести Земли (рис. 4).
Математический маятник — это идеализированная модель реального маятника при условии, что длина нити намного больше размеров подвешенного на ней тела и масса нити намного меньше массы тела. Кроме того, деформацией нити можно пренебречь.
Галилео Галилей экспериментально определил, что период малых колебаний (9
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://fb.ru/article/148323/matematicheskiy-mayatnik-period-uskorenie-i-formulyi
http://www.evkova.org/pruzhinnyie-i-matematicheskie-mayatniki-v-fizike
|
Колебания математического маятника. |
|
|
Математический маятник – материальная точка, подвешенная на невесомой нерастяжимой нити (физическая модель). |
|
|
Будем рассматривать движение маятника при условии, что угол отклонения мал, тогда, если измерять угол в радианах, справедливо утверждение: |
|
|
На тело действуют сила тяжести и сила натяжения нити. Равнодействующая этих сил имеет две составляющие: тангенциальную, меняющую ускорение по величине, и нормальную, меняющую ускорение по направлению (центростремительное ускорение, тело движется по дуге). |
|
|
Т.к. угол мал, то тангенциальная составляющая равна проекции силы тяжести на касательную к траектории: |
|
|
Сравним полученное уравнение с уравнением колебательного движения Видно, что |
|
|
Период колебаний |
Формула Галилея |
|
Важнейший вывод: период колебаний математического маятника не зависит от массы тела! |
|
|
Аналогичные вычисления можно проделать с помощью закона сохранения энергии. Учтем, что потенциальная энергия тела в поле тяготения равна |
|
|
Запишем закон сохранения энергии и возьмем производную от левой и правой частей уравнения: Т.к. производная от постоянной величины равна нулю, то Производная суммы равна сумме производных: |
|
|
Следовательно: |

 или
или  (формула Галилея).
(формула Галилея).Лекция
9
Теория
колебаний.
Колебания
бываю различной природы
Механические,
электромагнитные, звуковые.
Последовательные
периодические изменения параметров
системы называются колебаниями.
Время,
за которое система возвращается в
начальное состояние после вывода ее из
положения равновесия, называется
периодом -Т.
Количество
колебаний, совершаемых за единицу
времени, называется частотой.
![]() —
—
частота [Гц]
Колебания,
подчиняющиеся тригонометрическим
законам, называются гармоническими.
Математический маятник
Сейчас уже невозможно
проверить легенду о том, как Галилей,
стоя на молитве в соборе, внимательно
наблюдал за качанием бронзовых люстр.
Наблюдал и определял время, затраченное
люстрой на движение туда и обратно. Это
время потом назвали периодом колебаний.
Часов у Галилея не было, и, чтобы сравнить
период колебаний люстр, подвешенных на
цепях разной длины, он использовал
частоту биения своего пульса.
Маятники используют
для регулировки хода часов, поскольку
любой маятник имеет вполне определённый
период колебаний. Маятник находит также
важное применение в геологической
разведке. Известно, что в разных местах
земного шара значения g различны. Различны
они потому, что Земля — не вполне
правильный шар. Кроме того, в тех местах,
где залегают плотные породы, например,
некоторые металлические руды, значение
g аномально высоко. Точные измерения g
с помощью математического маятника
иногда позволяют обнаружить такие
месторождения.
Уравнение движения
математического маятника
Математическим
маятником называется тяжёлая материальная
точка, которая двигается или по
вертикальной окружности (плоский
математический маятник), или по сфере
(сферический маятник). В первом приближении
математическим маятником можно считать
груз малых размеров, подвешенный на
нерастяжимой гибкой нити.
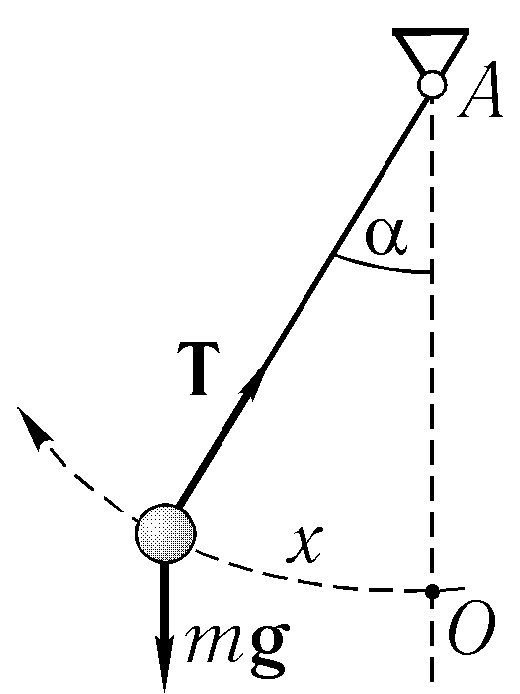
Рассмотрим движение
плоского математического маятника по
окружности радиуса l с центром в точке
О (рис. 1). Будем определять положение
точки М (маятника) углом отклонения φ
радиуса ОМ от вертикали. Направляя
касательную M t в сторону положительного
отсчёта угла φ , составим естественное
уравнение движения. Это уравнение
образуется из уравнения движения
mа
= F + N, (1)
где F — действующая
на точку активная сила, а N — реакция
связи.
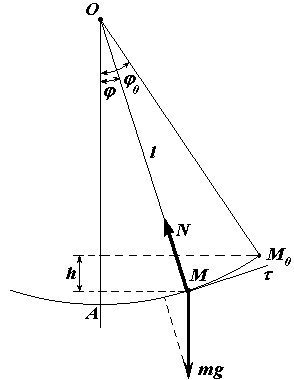
Рис.1
Уравнение (1) мы
получили по второму закону Ньютона,
который является основным законом
динамики и гласит, что производная по
времени от количества движения
материальной точки равна действующей
на неё силе, т. е.
![]()
(2).
Считая массу
постоянной, можно представить предыдущее
уравнение в виде
![]()
или
![]() ,
,
где W есть ускорение
точки.
Итак, уравнение
(1) в проекции на ось t даст нам одно из
естественных уравнений движения точки
по заданной неподвижной гладкой кривой:
![]()
или
 .
.
В нашем случае
получим в проекции на ось t,
где m есть
масса маятника.
Так как
![]()
или
![]() ,
,
отсюда находим
 .
.
Сокращая
на m будем окончательно иметь:
 ,
,
 ,
,
(4).
Рассмотрим сначала
случай малых колебаний. Пусть в начальный
момент маятник отклонён от вертикали
на угол φ и опущен без начальной скорости.
Тогда начальные условия будут:
при t = 0,
![]() (5).
(5).
Из интеграла
энергии:
 (6),
(6),
где
V — потенциальная энергия, а h — постоянная
интегрирования, следует, что при этих
условиях в любой момент времени угол φ
< φ 0. Значение постоянной h
определяется по начальным данным.
Допустим, что угол φ 0 мал (φ 0
<< 1); тогда угол φ будет также мал, и
можно приближённо положить sin φ -» φ. При
этом уравнение (4) примет вид
 (7).
(7).
1)
Колебания груза за счет сжатой пружины
Закон
Гука: сила, действующая со стороны
пружины, пропорциональна деформации
(сжатию).
F = — kx
![]()
Второй
закон Ньютона
![]()
Подставляя
выражение для ускорения через производную
![]()
Алгебраические
преобразования
![]()
![]()
Каноническое
уравнение колебаний
![]() ,
,
x
– смещение груза относительно положения
равновесия;
![]()
-собственная
частота колебаний
2)Математический
маятник(груз точечный, нить жесткая,
отклонения малы)
Координатное
описание с использованием равновесия
сил
Векторная
запись
![]()
Запись
в проекциях на оси
Представление
через вращательное движение
Угловая
скорость
![]()
Угловое
ускорение
![]()
Закон
вращательного движения
(произведение
момента инерции на угловое ускорение
равняется моменту силы)
![]()
Расписывая
момент инерции, угловое ускорение и
момент силы, перепишем
![]()
![]()
![]()
![]()
![]()
при
![]()
![]()
![]()
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
13.03.20163.54 Mб24Фелдман Л. Основы анализа поверхности.djvu
- #
- #
- #
- #
- #
- #
- #
- #
Математический маятник. Период колебаний математического маятника
Математическим маятником называют материальную точку, подвешенную на невесомой и нерастяжимой нити, прикрепленной к подвесу и находящейся в поле силы тяжести (или иной силы).
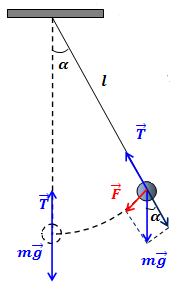
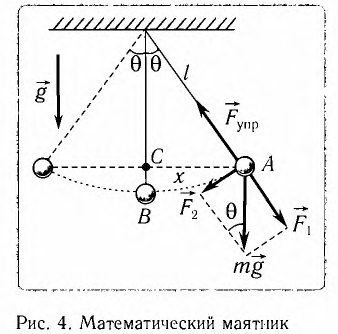
Исследуем колебания математического маятника в инерциальной системе отсчета, относительно которой точка его подвеса находится в покое или движется равномерно прямолинейно. Силой сопротивления воздуха будем пренебрегать (идеальный математический маятник). Первоначально маятник покоится в положении равновесия С. При этом действующие на него сила тяжести (vec F) и сила упругости (vec F_{ynp}) нити взаимно компенсируются.
Выведем маятник из положения равновесия (отклонив его, например, в положение А) и отпустим без начальной скорости (рис. 13.11). В этом случае силы (vec F) и (vec F_{ynp}) не уравновешивают друг друга. Тангенциальная составляющая силы тяжести (vec F_tau), действуя на маятник, сообщает ему тангенциальное ускорение (vec a_tau) (составляющая полного ускорения, направленная вдоль касательной к траектории движения математического маятника), и маятник начинает двигаться к положению равновесия с возрастающей по модулю скоростью. Тангенциальная составляющая силы тяжести (vec F_tau) является, таким образом, возвращающей силой. Нормальная составляющая (vec F_n) силы тяжести направлена вдоль нити против силы упругости (vec F_{ynp}). Равнодействующая сил (vec F_n) и (vec F_{ynp}) сообщает маятнику нормальное ускорение (~a_n), которое изменяет при этом направление вектора скорости, и маятник движется по дуге ABCD.
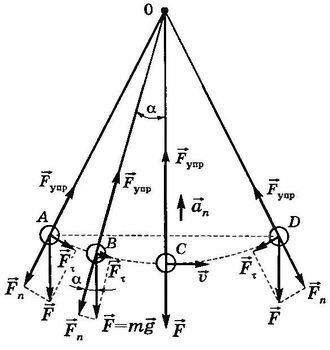
Чем ближе подходит маятник к положению равновесия С, тем меньше становится значение тангенциальной составляющей (~F_tau = F sin alpha). В положении равновесия она равна нулю, а скорость достигает максимального значения, и маятник движется по инерции дальше, поднимаясь по дуге вверх. При этом составляющая (vec F_tau) направлена против скорости. С увеличением угла отклонения а модуль силы (vec F_tau) увеличивается, а модуль скорости уменьшается, и в точке D скорость маятника становится равной нулю. Маятник на мгновение останавливается, а затем начинает двигаться в обратном направлении к положению равновесия. Вновь пройдя его по инерции, маятник, замедляя движение, дойдет до точки А (трение отсутствует), т.е. совершит полное колебание. После этого движение маятника будет повторяться в уже описанной последовательности.
Получим уравнение, описывающее свободные колебания математического маятника.
Пусть маятник в данный момент времени находится в точке В. Его смещение S от положения равновесия в этот момент равно длине дуги СВ (т.е. S = |СВ|). Обозначим длину нити подвеса l, а массу маятника — m.
Из рисунка 13.11 видно, что (~F_tau = F sin alpha), где (alpha =frac{S}{l}.) При малых углах (~(alpha <10^circ)) отклонения маятника (sin alpha approx alpha,) поэтому
(F_tau = -Ffrac{S}{l} = -mgfrac{S}{l}.)
Знак минус в этой формуле ставят потому, что тангенциальная составляющая силы тяжести направлена к положению равновесия, а смещение отсчитывают от положения равновесия.
Согласно второму закону Ньютона (m vec a = m vec g + F_{ynp}.) Спроецируем векторные величины этого уравнения на направление касательной к траектории движения математического маятника
(~F_tau = ma_tau .)
Из этих уравнений получим
(a_tau = -frac{g}{l}S) — динамическое уравнение движения математического маятника. Тангенциальное ускорение математического маятника пропорционально его смещению и направлено к положению равновесия. Это уравнение можно записать в виде[a_tau+frac{g}{l}S = 0]. Сравнивая его с уравнением гармонических колебаний (~a_x + omega^2x = 0) (см. § 13.3), можно сделать вывод, что математический маятник совершает гармонические колебания. А так как рассмотренные колебания маятника происходили под действием только внутренних сил, то это были свободные колебания маятника. Следовательно, свободные колебания математического маятника при малых отклонениях являются гармоническими.
Обозначим (frac{g}{l} = omega^2.) Откуда (omega = sqrt frac{g}{l}) — циклическая частота колебаний маятника.
Период колебаний маятника (T = frac{2 pi}{omega}.) Следовательно,
(T = 2 pi sqrt{ frac{l}{g} })
Это выражение называют формулой Гюйгенса. Оно определяет период свободных колебаний математического маятника. Из формулы следует, что при малых углах отклонения от положения равновесия период колебаний математического маятника: 1) не зависит от его массы и амплитуды колебаний; 2) пропорционален корню квадратному из длины маятника и обратно пропорционален корню квадратному из ускорения свободного падения. Это согласуется с экспериментальными законами малых колебаний математического маятника, которые были открыты Г. Галилеем.
Подчеркнем, что эту формулу можно использовать для расчета периода при одновременном выполнении двух условий: 1) колебания маятника должны быть малыми; 2) точка подвеса маятника должна покоиться или двигаться равномерно прямолинейно относительно инерциальной системы отсчета, в которой он находится.
Если точка подвеса математического маятника движется с ускорением (vec a) то при этом изменяется сила натяжения нити, что приводит к изменению и возвращающей силы, а следовательно, частоты и периода колебаний. Как показывают расчеты, период колебаний маятника в этом случае можно рассчитать по формуле
(T = 2 pi sqrt{ frac{l}{g’} })
где (~g’) — «эффективное» ускорение маятника в неинерциальной системе отсчета. Оно равно геометрической сумме ускорения свободного падения (vec g) и вектора, противоположного вектору (vec a), т.е. его можно рассчитать по формуле
(vec g’ = vec g + (- vec a).)
Литература
Аксенович Л. А. Физика в средней школе: Теория. Задания. Тесты: Учеб. пособие для учреждений, обеспечивающих получение общ. сред, образования / Л. А. Аксенович, Н.Н.Ракина, К. С. Фарино; Под ред. К. С. Фарино. — Мн.: Адукацыя i выхаванне, 2004. — С. 374-376.