Уравнения плоскости, компланарной двум неколлинеарным векторам
Напомним, что три или более векторов называются компланарными, если существует плоскость, которой они параллельны. Эту плоскость будем называть компланарной заданным векторам.
Направляющими векторами плоскости называются два неколлинеарных вектора, компланарных этой плоскости, т.е. принадлежащих плоскости или параллельных ей.
Пусть в координатном пространстве заданы:
а) точка ;
б) два неколлинеарных вектора (рис.4.15).
Требуется составить уравнение плоскости, компланарной векторам и проходящей через точку
Выберем на плоскости произвольную точку . Обозначим
— радиус-векторы точек
и
(рис.4.16).
Условие компланарности векторов (рис.4.16) можно записать, используя свойства смешанного произведения
Применяя формулу (1.17), получаем уравнение плоскости, проходящей через заданную точку и компланарной двум неколлинеарным векторам:
(4.18)
Параметрическое уравнение плоскости
Пусть в координатном пространстве заданы:
а) точка ;
б) два неколлинеарных вектора (рис.4.15).
Требуется составить параметрическое уравнение вида (4.10) плоскости, компланарной векторам и проходящей через точку
Выберем на плоскости произвольную точку . Обозначим
-радиус-векторы точек
и
(рис.4.16).
Точка принадлежит заданной плоскости тогда и только тогда, когда векторы
и
компланарны (см. разд. 1.3.2). Запишем условие компланарности:
где
— некоторые действительные числа (параметры). Учитывая, что
получим векторное параметрическое уравнение плоскости:
(4.19)
где — направляющие векторы плоскости, а
— радиус-вектор точки, принадлежащей плоскости.
Координатная форма записи уравнения (4.19) называется параметрическим уравнением плоскости:
(4.20)
где и
— координаты направляющих векторов
и
соответственно. Параметры
в уравнениях (4.19),(4.20) имеют следующий геометрический смысл: величины
пропорциональны расстоянию от заданной точки
до точки
принадлежащей плоскости. При
точка
совпадает с заданной точкой
. При возрастании
(или
) точка
перемещается в направлении вектора
(или
), а при убывании
(или
) — в противоположном направлении.
Замечания 4.4.
1. Поскольку направляющие векторы плоскости неколлинеарны, то они ненулевые.
2. Любой вектор , коллинеарный плоскости, ортогонален нормальному вектору
для этой плоскости. Поэтому их скалярное произведение равно нулю:
Следовательно, координаты и
направляющих векторов
и
плоскости и ее нормали связаны однородными уравнениями:
3. Направляющие векторы плоскости определяются неоднозначно.
4. Для перехода от общего уравнения плоскости (4.15) к параметрическому (4.20) нужно выполнить следующие действия:
1) найти любое решение уравнения
определяя тем самым координаты точки
принадлежащей плоскости;
2) найти любые два линейно независимых решения
однородного уравнения
определяя тем самым координаты решения
и
направляющих векторов
и
плоскости;
3) записать параметрическое уравнение (4.20).
5. Чтобы перейти от параметрического уравнения плоскости к общему, достаточно либо записать уравнение (4.18) и раскрыть определитель, либо найти нормаль как результат векторного произведения направляющих векторов:
и записать общее уравнение плоскости в форме (4.14):
6. Векторное параметрическое уравнение плоскости (4.19), полученное в прямоугольной системе координат, имеет тот же вид в любой другой аффинной системе координат. Геометрический смысл коэффициентов в уравнении остается прежним.
Пример 4.8. В координатном пространстве (в прямоугольной системе координат) заданы точки
и
(см. рис.4.11). Требуется:
а) составить параметрическое уравнение плоскости, перпендикулярной отрезку и проходящей через его середину;
б) составить общее уравнение плоскости, проходящей через середину отрезка и компланарной радиус-векторам
и
Решение. а) Общее уравнение искомой плоскости было получено в примере 4.5: Составим параметрическое уравнение:
1) находим любое решение уравнения , например,
следовательно, точка
принадлежит плоскости;
2) находим два линейно независимых (непропорциональных) решения однородного уравнения например
и
следовательно, векторы
являются направляющими для плоскости;
3) записываем параметрическое уравнение плоскости (4.20):
б) Координаты середины отрезка
были найдены в примере 4.5. Нормаль к искомой плоскости получим как векторное произведение ее направляющих векторов
и
Составляем уравнение (4.14):
Тот же результат можно получить, записывая уравнение (4.18):
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.
5.2.1. Как составить уравнение плоскости
по точке и двум неколлинеарным векторам?
Конструировать уравнение будем с помощью векторов и точек. Их должно быть как можно меньше, но достаточно, чтобы однозначно определить плоскость. Одним словом, красивая математическая лаконичность.
Казалось бы, плоскость можно однозначно определить с помощью двух неколлинеарных векторов. Но нет – векторы свободны и бродят по всему пространству, поэтому ещё нужна фиксированная точка:
Уравнение плоскости, которая проходит через точку  параллельно неколлинеарным векторам
параллельно неколлинеарным векторам  , выражается формулой:
, выражается формулой: 
! Примечание: под выражением «вектор параллелен плоскости» подразумевается, что вектор можно отложить и в самой плоскости. Для наглядности я буду откладывать векторы прямо в плоскости.
Принципиально ситуация выглядит так:  Обратите внимание, что точка и два коллинеарных вектора не определят плоскость однозначно (они будут «вертеться» вокруг точки и зададут целый «пучок» плоскостей).
Обратите внимание, что точка и два коллинеарных вектора не определят плоскость однозначно (они будут «вертеться» вокруг точки и зададут целый «пучок» плоскостей).
Задача 130
Составить уравнение плоскости по точке  и неколлинеарным векторам
и неколлинеарным векторам  .
.
Решение: искомое уравнение составим по формуле: 
Определитель удобнее всего раскрыть по первому столбцу: 
Раскрываем определители второго порядка: 
На первом месте у нас нарисовался знак «минус», и хорошим тоном считается его убрать (точно так же, как и у общего уравнения «плоской» прямой).
Меняем у каждого слагаемого знак и проводим дальнейшие упрощения: 
 , сократить здесь ничего нельзя, поэтому:
, сократить здесь ничего нельзя, поэтому:
Ответ: 
Как проверить задание? Для проверки пока не хватает информации, но мы обязательно выполним её чуть позже. Решаем самостоятельно:
Задача 131
Составить уравнение плоскости по векторам  и принадлежащей ей точке
и принадлежащей ей точке  .
.
Кстати, если векторы коллинеарны, то и на этот случай есть корректный ответ 
Уравнения плоскости, компланарной двум неколлинеарным векторам
Напомним, что три или более векторов называются компланарными , если существует плоскость, которой они параллельны. Эту плоскость будем называть компланарной заданным векторам .
Направляющими векторами плоскости называются два неколлинеарных вектора, компланарных этой плоскости, т.е. принадлежащих плоскости или параллельных ей.
Пусть в координатном пространстве заданы:
б) два неколлинеарных вектора (рис.4.15).
Требуется составить уравнение плоскости, компланарной векторам и проходящей через точку
Выберем на плоскости произвольную точку . Обозначим — радиус-векторы точек и (рис.4.16).
Условие компланарности векторов (рис.4.16) можно записать, используя свойства смешанного произведения Применяя формулу (1.17), получаем уравнение плоскости, проходящей через заданную точку и компланарной двум неколлинеарным векторам:
Параметрическое уравнение плоскости
Пусть в координатном пространстве заданы:
б) два неколлинеарных вектора (рис.4.15).
Требуется составить параметрическое уравнение вида (4.10) плоскости, компланарной векторам и проходящей через точку
Выберем на плоскости произвольную точку . Обозначим -радиус-векторы точек и (рис.4.16).
Точка принадлежит заданной плоскости тогда и только тогда, когда векторы и компланарны (см. разд. 1.3.2). Запишем условие компланарности: где — некоторые действительные числа (параметры). Учитывая, что получим векторное параметрическое уравнение плоскости :
где — направляющие векторы плоскости, а — радиус-вектор точки, принадлежащей плоскости.
Координатная форма записи уравнения (4.19) называется параметрическим уравнением плоскости:
где и — координаты направляющих векторов и соответственно. Параметры в уравнениях (4.19),(4.20) имеют следующий геометрический смысл: величины пропорциональны расстоянию от заданной точки до точки принадлежащей плоскости. При точка совпадает с заданной точкой . При возрастании (или ) точка перемещается в направлении вектора (или ), а при убывании (или ) — в противоположном направлении.
1. Поскольку направляющие векторы плоскости неколлинеарны, то они ненулевые.
2. Любой вектор , коллинеарный плоскости, ортогонален нормальному вектору для этой плоскости. Поэтому их скалярное произведение равно нулю:
Следовательно, координаты и направляющих векторов и плоскости и ее нормали связаны однородными уравнениями:
3. Направляющие векторы плоскости определяются неоднозначно.
4. Для перехода от общего уравнения плоскости (4.15) к параметрическому (4.20) нужно выполнить следующие действия:
1) найти любое решение уравнения определяя тем самым координаты точки принадлежащей плоскости;
2) найти любые два линейно независимых решения однородного уравнения определяя тем самым координаты решения и направляющих векторов и плоскости;
3) записать параметрическое уравнение (4.20).
5. Чтобы перейти от параметрического уравнения плоскости к общему , достаточно либо записать уравнение (4.18) и раскрыть определитель, либо найти нормаль как результат векторного произведения направляющих векторов:
и записать общее уравнение плоскости в форме (4.14):
6. Векторное параметрическое уравнение плоскости (4.19), полученное в прямоугольной системе координат, имеет тот же вид в любой другой аффинной системе координат. Геометрический смысл коэффициентов в уравнении остается прежним.
Пример 4.8. В координатном пространстве (в прямоугольной системе координат) заданы точки и (см. рис.4.11). Требуется:
а) составить параметрическое уравнение плоскости, перпендикулярной отрезку и проходящей через его середину;
б) составить общее уравнение плоскости, проходящей через середину отрезка и компланарной радиус-векторам и
Решение. а) Общее уравнение искомой плоскости было получено в примере 4.5: Составим параметрическое уравнение:
1) находим любое решение уравнения , например, следовательно, точка принадлежит плоскости;
2) находим два линейно независимых (непропорциональных) решения однородного уравнения например и следовательно, векторы являются направляющими для плоскости;
3) записываем параметрическое уравнение плоскости (4.20):
б) Координаты середины отрезка были найдены в примере 4.5. Нормаль к искомой плоскости получим как векторное произведение ее направляющих векторов и
Составляем уравнение (4.14):
Тот же результат можно получить, записывая уравнение (4.18):
Общее уравнение плоскости : описание, примеры, решение задач
В статье рассмотрим такой тип уравнений плоскости как общее уравнение, получим его вид и разберем на практических примерах. Рассмотрим частные случаи и понятие общего неполного уравнения плоскости.
Общее уравнение плоскости: основные сведения
Перед началом разбора темы вспомним, что такое уравнение плоскости в прямоугольной системе координат в трёхмерном пространстве. Пусть нам дана прямоугольная система координат O x y z в трехмерном пространстве, уравнением плоскости в заданной системе координат будет такое уравнение с тремя неизвестными x , y , и z , которому отвечали бы координаты всех точек этой плоскости и не отвечали бы координаты никаких прочих точек. Иначе говоря, подставив в уравнение плоскости координаты некоторой точки этой плоскости, получаем тождество. Если же в уравнение подставить координаты какой-то другой точки, не принадлежащей заданной плоскости, равенство станет неверным.
Также вспомним определение прямой, перпендикулярной к плоскости: прямая является перпендикулярной к заданной плоскости, если она перпендикулярна любой прямой, принадлежащей этой плоскости.
Любую плоскость, заданную в прямоугольной системе координат O x y z трехмерного пространства, можно определить уравнением A x + B y + C z + D = 0 . В свою очередь, любое уравнение A x + B y + C z + D = 0 определяет некоторую плоскость в данной прямоугольной системе координат трехмерного пространства. A , B , C , D – некоторые действительные числа, и числа A , B , C не равны одновременно нулю.
Теорема состоит из двух частей. Разберем доказательство каждой из них.
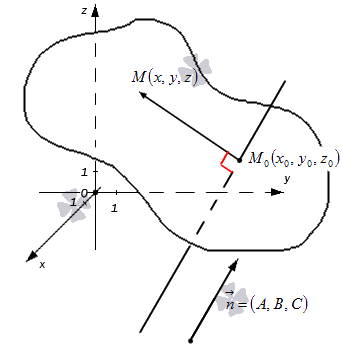
- Первая часть теоремы гласит, что любую заданную плоскость возможно описать уравнением вида A x + B y + C z + D = 0 . Допустим, задана некоторая плоскость и точка M 0 ( x 0 , y 0 , z 0 ) , через которую эта плоскость проходит. Нормальным вектором этой плоскости является n → = ( A , B , C ) . Приведем доказательство, что указанную плоскость в прямоугольной системе координат O x y z задает уравнение A x + B y + C z + D = 0 .
Возьмем произвольную точку заданной плоскости M ( x , y , z ) .В таком случае векторы n → = ( A , B , C ) и M 0 M → = ( x — x 0 , y — y 0 , z — z 0 ) будут перпендикулярны друг другу, а значит их скалярное произведение равно нулю:
n → , M 0 M → = A x — x 0 + B ( y — y 0 ) + C ( z — z 0 ) = A x + B y + C z — ( A x 0 + B y 0 + C z 0 )
Примем D = — ( A x 0 + B y 0 + C z 0 ) , тогда уравнение преобразуется в следующий вид: A x + B y + C z + D = 0 . Оно и будет задавать исходную плоскость. Первая часть теоремы доказана.
- Во второй части теоремы утверждается, что любое уравнение вида A x + B y + C z + D = 0 задает некоторую плоскость в прямоугольной системе координат O x y z трехмерного пространства. Докажем это.
В теореме также указано, что действительные числа А , B , C одновременно не являются равными нулю. Тогда существует некоторая точка M 0 ( x 0 , y 0 , z 0 ) , координаты которой отвечают уравнению A x + B y + C z + D = 0 , т.е. верным будет равенство A x 0 + B y 0 + C z 0 + D = 0 . Отнимем левую и правую части этого равенства от левой и правой частей уравнения A x + B y + C z + D = 0 . Получим уравнение вида
A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 , и оно эквивалентно уравнению A x + B y + C z + D = 0 . Докажем, что уравнение A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 задает некоторую плоскость.
Уравнение A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 являет собой условие, необходимое и достаточное для перпендикулярности векторов n → = ( A , B , C ) и M 0 M → = x — x 0 , y — y 0 , z — z 0 . Опираясь на утверждение, указанное перед теоремой, возможно утверждать, что при справедливом равенстве A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 множество точек M ( x , y , z ) задает плоскость, у которой нормальный вектор n → = ( A , B , C ) . При этом плоскость проходит через точку M ( x 0 , y 0 , z 0 ) . Иначе говоря, уравнение A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) + D = 0 задает в прямоугольной системе координат O x y z трехмерного пространства некоторую плоскость. Таким, образом, эквивалентное этому уравнению уравнение A x + B y + C z + D = 0 также определяет эту плоскость. Теорема доказана полностью.
Уравнение вида A x + B y + C z + D = 0 называют общим уравнением плоскости в прямоугольной системе координат O x y z трехмерного пространства.
Допустим, задано некоторое общее уравнение плоскости λ · A x + λ · B y + λ · C z + λ · D = 0 , где λ – некое действительное число, не равное нулю. Это уравнение также задает в прямоугольной системе координат некоторую плоскость, совпадающую с плоскостью, определяемую уравнением A x + B y + C z + D = 0 , поскольку описывает то же самое множество точек трехмерного пространства. Например, уравнения x — 2 · y + 3 · z — 7 = 0 и — 2 · x + 4 · y — 2 3 · z + 14 = 0 задают одну и ту же плоскость, поскольку им обоим отвечают координаты одних и тех же точек трехмерного пространства.
Раскроем чуть шире смысл теорем.
В пределах заданной системы координат плоскость и общее уравнение, ее определяющее, неразрывно связаны: каждой плоскости отвечает общее уравнение плоскости вида A x + B y + C z + D = 0 ( при конкретных значениях чисел A , B , C , D ). В свою очередь, этому уравнению отвечает заданная плоскость в заданной прямоугольной системе координат.
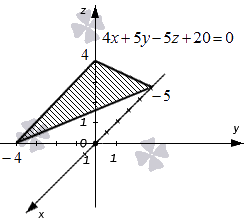
Укажем пример как иллюстрацию этих утверждений.
Ниже приведен чертеж, на котором изображена плоскость в фиксированной прямоугольной системе координат трехмерного пространства. Заданной плоскости отвечает общее уравнение вида 4 x + 5 y – 5 z + 20 = 0 , и ему соответствуют координаты любой точки этой плоскости. В свою очередь, уравнение 4 x + 5 y – 5 z + 20 = 0 описывает в заданной системе координат множество точек, которые составляют изображенную плоскость.
Общее уравнение плоскости, проходящей через точку
Повторимся: точка M 0 ( x 0 , y 0 , z 0 ) лежит на плоскости, заданной в прямоугольной системе координат трехмерного пространства уравнением A x + B y + C z + D = 0 в том случае, когда подставив координаты точки M 0 ( x 0 , y 0 , z 0 ) в уравнение A x + B y + C z + D = 0 , мы получим тождество.
Заданы точки M 0 ( 1 , — 1 , — 3 ) и N 0 ( 0 , 2 , — 8 ) и плоскость, определяемая уравнением 2 x + 3 y — z — 2 = 0 . Необходимо проверить, принадлежат ли заданные точки заданной плоскости.
Решение
Подставим координаты точки М 0 в исходной уравнение плоскости:
2 · 1 + 3 · ( — 1 ) — ( — 3 ) — 2 = 0 ⇔ 0 = 0
Мы видим, что получено верное равенство, значит точка M 0 ( 1 , — 1 , — 3 ) принадлежит заданной плоскости.
Аналогично проверим точку N 0 . Подставим ее координаты в исходное уравнение:
2 · 0 + 3 · 2 — ( — 8 ) — 2 = 0 ⇔ 12 = 0
Равенство неверно. Таким, образом, точка N 0 ( 0 , 2 , — 8 ) не принадлежит заданной плоскости.
Ответ: точка М 0 принадлежит заданной плоскости; точка N 0 – не принадлежит.
Приведенное выше доказательство теоремы об общем уравнении дает нам возможность использовать важный факт: вектор n → = ( A , B , C ) — нормальный вектор для плоскости, определяемой уравнением A x + B y + C z + D = 0 . Так, если нам известен вид общего уравнения, то возможно записать координаты нормального вектора заданной плоскости.
В прямоугольной системе координат задана плоскость 2 x + 3 y — z + 5 = 0 . Необходимо записать координаты всех нормальных векторов заданной плоскости.
Решение
Мы знаем, что заданные общим уравнением коэффициенты при переменных x , y , z служат координатами нормального вектора заданной плоскости. Тогда, нормальный вектор n → исходной плоскости имеет координаты 2 , 3 , — 1 . В свою очередь, множество нормальных векторов запишем так:
λ · n → = λ · 2 , λ · 3 , — λ , λ ∈ R , λ ≠ 0
Ответ: λ · 2 , λ · 3 , — λ , λ ∈ R , λ ≠ 0
Разберем обратную задачу, когда требуется составить уравнение плоскости по заданным координатам нормального вектора.
Очевидным фактом является то, что нормальный вектор n → = ( A , B , C ) является нормальным вектором бесконечного множества параллельных плоскостей. Поэтому для обозначения конкретной плоскости введем дополнительное условие: зададим некоторую точку M 0 ( x 0 , y 0 , z 0 ) , принадлежащую плоскости. Так, задавая в условии нормальный вектор и некоторую точку плоскости, мы ее зафиксировали.
Общее уравнение плоскости с нормальным вектором n → = ( A , B , C ) будет выглядеть так: A x + B y + C z + D = 0 . По условию задачи точка M 0 ( x 0 , y 0 , z 0 ) принадлежит заданной плоскости, т.е. ее координаты отвечают уравнению плоскости, а значит верно равенство: A x 0 + B y 0 + C z 0 + D = 0
Вычитая соответственно правые и левые части исходного уравнения и уравнения A x 0 + B y 0 + C z 0 + D = 0 , получим уравнение вида A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) = 0 . Оно и будет уравнением плоскости, проходящей через точку M 0 ( x 0 , y 0 , z 0 ) и имеющей нормальный вектор n → = ( A , B , C ) .
Возможно получить это уравнение другим способом.
Очевидным фактом является то, что все точки М ( x , y , z ) трехмерного пространства задают данную плоскость тогда и только тогда, когда векторы n → = ( A , B , C ) и M 0 M → = ( x — x 0 , y — y 0 , z — z 0 ) перпендикулярны или, иначе говоря, когда скалярное произведение этих векторов равно нулю:
n → , M 0 M → = A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) = 0
Задана точка М 0 ( — 1 , 2 , — 3 ) , через которую в прямоугольной системе координат проходит плоскость, а также задан нормальный вектор этой плоскости n → = ( 3 , 7 , — 5 ) . Необходимо записать уравнение заданной плоскости.
Решение
Рассмотрим два способа решения.
- Исходные условия позволяют получить следующие данные:
x 0 = — 1 , y 0 = 2 , z 0 = — 3 , A = 3 , B = 7 , C = — 5
Подставим их в общее уравнение плоскости, проходящей через точку, т.е. в A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) = 0
3 ( x — ( — 1 ) ) + 7 ( y — 2 ) — 5 ( z — ( — 3 ) ) = 0 ⇔ 3 x + 7 y — 5 z — 26 = 0
- Допустим, М ( x , y , z ) – некоторая точки заданной плоскости. Определим координаты вектора M 0 M → по координатам точек начала и конца:
M 0 M → = ( x — x 0 , y — y 0 , z — z 0 ) = ( x + 1 , y — 2 , z + 3 )
Чтобы получить искомое общее уравнение плоскости, необходимо также воспользоваться необходимым и достаточным условием перпендикулярности векторов и тогда:
n → , M 0 M → = 0 ⇔ 3 ( x + 1 ) + 7 ( y — 2 ) — 5 ( z + 3 ) = 0 ⇔ ⇔ 3 x + 7 y — 5 z — 26 = 0
Ответ: 3 x + 7 y — 5 z — 26 = 0
Неполное общее уравнение плоскости
Выше мы говорили о том, что, когда все числа А , B , C , D отличны от нуля, общее уравнение плоскости A x + B y + C z + D = 0 называют полным. В ином случае общее уравнение плоскости является неполным.
Разберем все возможные варианты общих неполных уравнений в прямоугольной системе координат трехмерного пространства.
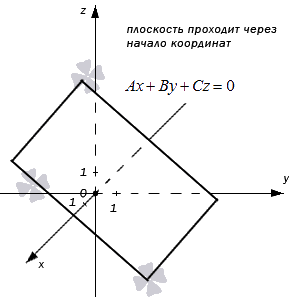
- В случае, когда D = 0 , мы получаем общее неполное уравнение плоскости: A x + B y + C z + D = 0 ⇔ A x + B y + C z = 0
Такая плоскость в прямоугольной системе координат проходит через начало координат. В самом деле, если подставим в полученное неполное уравнение плоскости координаты точки О ( 0 , 0 , 0 ) , то придем к тождеству:
A · 0 + B · 0 + C · 0 = 0 ⇔ 0 ≡ 0
- Если А = 0 , В ≠ 0 , С ≠ 0 , или А ≠ 0 , В = 0 , С ≠ 0 , или А ≠ 0 , В ≠ 0 , С = 0 , то общие уравнения плоскостей имеют вид соответственно: B y + C z + D = 0 , или A x + C z + D = 0 , или A x + B y + D = 0 . Такие плоскости параллельны координатным осям О x , O y , O z соответственно. Когда D = 0 , плоскости проходят через эти координатные оси соответственно. Также заметим, что неполные общие уравнения плоскостей B y + C z + D = 0 , A x + C z + D = 0 и A x + B y + D = 0 задают плоскости, которые перпендикулярны плоскостям O y z , O x z , O z y соответственно.
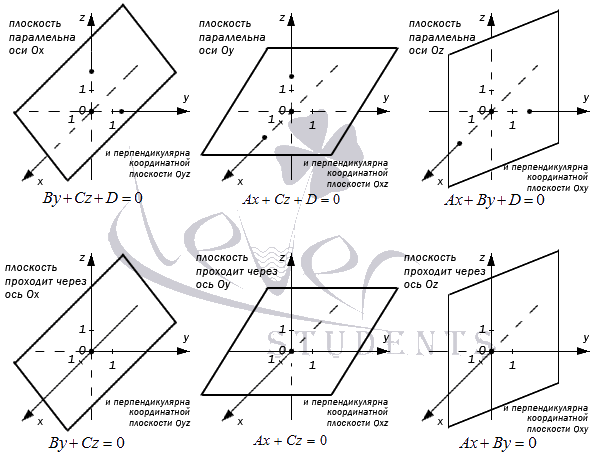
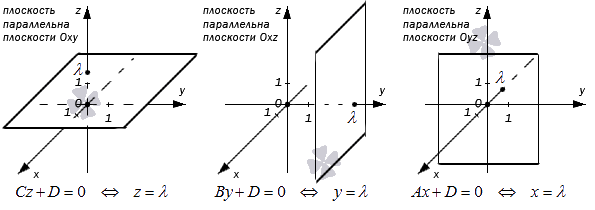
- При А = 0 , В = 0 , С ≠ 0 , или А = 0 , В ≠ 0 , С = 0 , или А ≠ 0 , В = 0 , С = 0 получим общие неполные уравнения плоскостей: C z + D = 0 ⇔ z + D C = 0 ⇔ z = — D C ⇔ z = λ , λ ∈ R или B y + D = 0 ⇔ y + D B = 0 ⇔ y = — D B ⇔ y = λ , λ ∈ R или A x + D = 0 ⇔ x + D A = 0 ⇔ x = — D A ⇔ x = λ , λ ∈ R соответственно.
Эти уравнения определяют плоскости, которые параллельны координатным плоскостям O x y , O x z , O y z соответственно и проходят через точки 0 , 0 , — D C , 0 , — D B , 0 и — D A , 0 , 0 соответственно. При D = 0 уравнения самих координатных плоскостей O x y , O x z , O y z выглядят так: z = 0 , y = 0 , x = 0
Задана плоскость, параллельная координатной плоскости O y z и проходящая через точку М 0 ( 7 , — 2 , 3 ) . Необходимо составить общее уравнение заданной плоскости.
Решение
Условием задачи определено, что заданная плоскость параллельна координатной плоскости O y z , а, следовательно, может быть задана общим неполным уравнением плоскости A x + D = 0 , A ≠ 0 ⇔ x + D A = 0 . Поскольку точка M 0 ( 7 , — 2 , 3 ) лежит на плоскости по условию задачи, то очевидно, что координаты этой точки должны отвечать уравнению плоскости x + D A = 0 , иначе говоря, должно быть верным равенство 7 + D A = 0 . Преобразуем: D A = — 7 , тогда требуемое уравнение имеет вид: x — 7 = 0 .
Задачу возможно решить еще одним способом.
Вновь обратим внимание на заданную условием задачи параллельность данной плоскости координатной плоскости O y z . Из этого условия понятно, что возможно в качестве нормального вектора заданной плоскости использовать нормальный вектор плоскости O y z : i → = ( 1 , 0 , 0 ) . Так, нам известны и точка, принадлежащая плоскости (задана условием задачи) и ее нормальный вектор. Таким образом, становится возможно записать общее уравнение заданной плоскости:
A ( x — x 0 ) + B ( y — y 0 ) + C ( z — z 0 ) = 0 ⇔ ⇔ 1 · ( x — 7 ) + 0 · ( y + 2 ) + 0 · ( z — 3 ) = 0 ⇔ ⇔ x — 7 = 0
Ответ: x — 7 = 0
Задана плоскость, перпендикулярная плоскости O x y и проходящая через начало координат и точку М 0 ( — 3 , 1 , 2 ) .
Решение
Плоскость, которая перпендикулярна координатной плоскости O x y определяется общим неполным уравнением плоскости A x + B y + D = 0 ( А ≠ 0 , В ≠ 0 ) . Условием задачи дано, что плоскость проходит через начало координат, тогда D = 0 и уравнение плоскости принимает вид A x + B y = 0 ⇔ x + B A y = 0 .
Найдем значение B A . В исходных данных фигурирует точка М 0 ( — 3 , 1 , 2 ) , координаты которой должны отвечать уравнению плоскости. Подставим координаты, получим верное равенство: — 3 + B A · 1 = 0 , откуда определяем B A = 3 .
Так, мы имеем все данные, чтобы записать требуемое общее уравнение плоскости: x + 3 y = 0 .
http://mathhelpplanet.com/static.php?p=uravneniya-ploskosti-komplanarnoi-dvum-nekollinyearnym-vektoram
http://zaochnik.com/spravochnik/matematika/prjamaja-ploskost/obschee-uravnenie-ploskosti/
Пусть имеется точка М 0 (x
0, y 0, z
0) и два неколлинеарных вектора
![]()
и
![]()
.
Требуется найти уравнение плоскости,
проходящей через точку М 0
параллельно векторам
и
.
Возьмем произвольную точку М(x,
y, z),
принадлежащую искомой плоскости.
Тогда векторы
![]()
являются
компланарными и их смешанное произведение
равно нулю. Имеем уравнение:

.
Рассмотренный подход к получению
уравнения плоскости используется, в
частности, при выводе уравнения плоскости,
проходящей через три заданные точки.
Пусть имеются три точки М 1 (x
1, y 1, z
1), M 2 (x
2, y 2, z
2), M 3 (x
3, y 3,
z 3). Требуется
найти уравнение плоскости, проходящей
через эти точки. Возьмем на плоскости
произвольную точку М
(x, y,
z) и
рассмотрим векторы
![]()
=
(x 2 – x
1; y 2 –
y 1; z
2 – z 1),
![]()
=
(x 3 – x
1; y 3 –
y 1; z
3 – z 1)
и
![]()
=
(x – x
1; y –
y 1; z
– z 1),
которые лежат в искомой плоскости и,
следовательно, компланарны. Их смешанное
произведение равно нулю. Получим искомое
уравнение

.
3. Уравнение плоскости «в отрезках».
Уравнение плоскости вида
![]()
называется уравнением плоскости «в
отрезках». Его легко получить из
общего уравнения плоскости A
x + B
y + С
z + D
= 0 при условии, что все коэффициенты А,
В, С и D отличны
от нуля.
A x
+ B
y
+ С
z
+ D = 0
A
x
+ B
y
+ С
z
= –D
![]()

.
Обозначая знаменатели дробей в последнем
уравнении через a ,
b и c,
получим уравнение
.
В этом уравнении числа a,
b и с равны
величинам отрезков, которые плоскость
отсекает на осях координат. Действительно,
при х = y = 0 получим
z = c,
при x = z
= 0 получим y = b,
а при y = z
= 0 получим x = a,
то есть точки (0, 0, c),
(0, b, 0) и (a,
0, 0) являются точками пересечения
плоскости с осями OX,
OY и OZ
соответственно.
4. Угол между плоскостями.
Углом между плоскостями называется
острый угол между
ними.
16
Пусть плоскости P1
и P2 заданы
уравнениями:
P1: A
1 x + B
1 y + C
1 z + D
1 = 0,
![]()
— вектор нормали,
P2: A
2 x + B
2 y + C
2 z + D
2 = 0,
,
— вектор нормали.
Заметим, что угол между векторами
нормалей равен либо углу ,
либо смежному с ним тупому углу ,
так как эти векторы направлены
перпендикулярно плоскостям. В результате
получаем cos
= cos
()
=
![]()
=
=
=

.
§ 5. Прямая в пространстве
1. Канонические уравнения прямой.
Вывод канонических уравнений прямой
производится точно так же, как это
делалось для прямой на плоскости.
Пусть даны точка М 0 (x
0, y 0, z
0) и вектор
![]()
—
направляющий вектор прямой. Требуется
найти уравнение прямой, проходящей
через точку М 0 параллельно
вектору
.
Возьмем на искомой прямой произвольную
точку М (x, y,
z) и рассмотрим
и
— радиусы-векторы точек М и М
0. Вектор
лежит на прямой и, следовательно,
коллинеарен вектору
,
что равносильно векторному равенству
–
=
t
— векторному параметрическому
уравнению прямой. Переписав это
уравнение в координатной форме, получим
параметрические уравнения прямой

.
Из параметрических уравнений получаем
канонические уравнения прямой в
пространстве
![]()
=
![]()
=![]()
,
которые представляют собой условия
пропорциональности координат коллинеарных
векторов
![]()
и
![]()
.
Уравнения прямой, проходящей через
две заданные точки M
1 (x 1, y
1, z 1) и M
2 (x 2, y
2, z 2), имеют
вид
![]()
=
![]()
=
![]()
,
так как вектор
17
=![]()
,
лежащий на прямой, можно использовать
в качестве направляющего вектора.
Прямые, заданные каноническими или
параметрическими уравнениями будут
параллельны, если их направляющие
векторы коллинеарны, и перпендикулярны,
если их направляющие векторы ортогональны:
Пусть прямые L 1
и L 2,
заданы каноническими уравнениями:
L1:
![]()
=
![]()
=
![]()
,
— направляющий вектор,
L2:
![]()
=
![]()
=
![]()
,
![]()
— направляющий вектор.
Тогда условия параллельности и
перпендикулярности этих прямых
описываются следующим образом:
L 1
L 2
![]()
;
L 1
L
2
![]()
.
Угол между прямыми
L 1 и
L 2
вычисляется по формуле
cos
= ![]()
=
=

,
так как угол между направляющими
векторами
и
данных
прямых равен либо углу ,
либо смежному с ним углу
– .
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
5.2.1. Как составить уравнение плоскости
по точке и двум неколлинеарным векторам?
Конструировать уравнение будем с помощью векторов и точек. Их должно быть как можно меньше, но достаточно, чтобы однозначно определить плоскость. Одним словом, красивая математическая лаконичность.
Казалось бы, плоскость можно однозначно определить с помощью двух неколлинеарных векторов. Но нет – векторы свободны и бродят по всему пространству, поэтому ещё нужна фиксированная точка:
Уравнение плоскости, которая проходит через точку ![]() параллельно неколлинеарным векторам
параллельно неколлинеарным векторам ![]() , выражается формулой:
, выражается формулой:
! Примечание: под выражением «вектор параллелен плоскости» подразумевается, что вектор можно отложить и в самой плоскости. Для наглядности я буду откладывать векторы прямо в плоскости.
Принципиально ситуация выглядит так:
Обратите внимание, что точка и два коллинеарных вектора не определят плоскость однозначно (они будут «вертеться» вокруг точки и зададут целый «пучок» плоскостей).
Задача 130
Составить уравнение плоскости по точке ![]() и неколлинеарным векторам
и неколлинеарным векторам ![]() .
.
Решение: искомое уравнение составим по формуле:
Определитель удобнее всего раскрыть по первому столбцу:
![]()
Раскрываем определители второго порядка:
![]()
На первом месте у нас нарисовался знак «минус», и хорошим тоном считается его убрать (точно так же, как и у общего уравнения «плоской» прямой).
Меняем у каждого слагаемого знак и проводим дальнейшие упрощения:
![]()
![]() , сократить здесь ничего нельзя, поэтому:
, сократить здесь ничего нельзя, поэтому:
Ответ: ![]()
Как проверить задание? Для проверки пока не хватает информации, но мы обязательно выполним её чуть позже. Решаем самостоятельно:
Задача 131
Составить уравнение плоскости по векторам ![]() и принадлежащей ей точке
и принадлежащей ей точке ![]() .
.
Кстати, если векторы коллинеарны, то и на этот случай есть корректный ответ
 5.2.2. Как составить уравнение плоскости по трём точкам?
5.2.2. Как составить уравнение плоскости по трём точкам?
 5.1.5. Уравнение плоскости в отрезках
5.1.5. Уравнение плоскости в отрезках
| Оглавление |
Автор: Aлeксaндр Eмeлин
Уравнение плоскости.
Навигация по странице:
- Плоскость — определение
- Общее уравнение плоскости
- Уравнение плоскости в отрезках
- Уравнение плоскости, проходящей через точку, перпендикулярно вектору нормали
- Уравнение плоскости, проходящей через три заданные точки, не лежащие на одной прямой
Определение. Плоскость — есть поверхность, полностью содержащая, каждую прямую, соединяющую любые её точки.
Общее уравнение плоскости
Любую плоскость можно задать уравнением плоскости первой степени вида
A x + B y + C z + D = 0
где A, B и C не могут быть одновременно равны нулю.
Уравнение плоскости в отрезках
Если плоскость пересекает оси OX, OY и OZ в точках с координатами (a, 0, 0), (0, b, 0) и (0, 0, с), то она может быть найдена, используя формулу уравнения плоскости в отрезках
| x | + | y | + | z | = 1 |
| a | b | c |
Уравнение плоскости, проходящей через точку, перпендикулярно вектору нормали
Чтобы составить уравнение плоскости, зная координаты точки плоскости M(x0, y0, z0) и вектора нормали плоскости n = {A; B; C} можно использовать следующую формулу.
A(x — x0) + B(y — y0) + C(z — z0) = 0
Уравнение плоскости, проходящей через три заданные точки, не лежащие на одной прямой
Если заданы координаты трех точек A(x1, y1, z1), B(x2, y2, z2) и C(x3, y3, z3), лежащих на плоскости, то уравнение плоскости можно найти по следующей формуле
| x — x1 | y — y1 | z — z1 | = 0 |
| x2 — x1 | y2 — y1 | z2 — z1 | |
| x3 — x1 | y3 — y1 | z3 — z1 |