|
0 / 0 / 0 Регистрация: 30.11.2012 Сообщений: 4 |
|
|
1 |
|
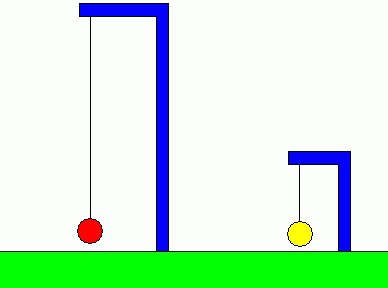
как взаимосвязана длина нити и ускорение? (заходим,размышляем)30.11.2012, 21:16. Показов 3131. Ответов 6
[ATTACH]
[/ATTACH] получил вот такую систему уравнений: ma1=F-T но этого недостаточно, нужно записать еще одно уравнение. Миниатюры
0 |

|
Programming Эксперт 94731 / 64177 / 26122 Регистрация: 12.04.2006 Сообщений: 116,782 |
30.11.2012, 21:16 |
|
6 |
|
2644 / 2220 / 239 Регистрация: 03.07.2012 Сообщений: 8,064 Записей в блоге: 1 |
|
|
30.11.2012, 22:05 |
2 |
|
a1=a2+2*a3
0 |
|
0 / 0 / 0 Регистрация: 30.11.2012 Сообщений: 4 |
|
|
30.11.2012, 22:51 [ТС] |
3 |
|
a1=a2+2*a3 как ты это уравнение нашел?
0 |

|
2644 / 2220 / 239 Регистрация: 03.07.2012 Сообщений: 8,064 Записей в блоге: 1 |
|
|
30.11.2012, 22:57 |
4 |
|
Напиши соотношение для скоростей, чтобы нить была натянута.
1 |
|
0 / 0 / 0 Регистрация: 30.11.2012 Сообщений: 4 |
|
|
02.12.2012, 22:26 [ТС] |
5 |
|
Напиши соотношение для скоростей, чтобы нить была натянута. размышлял над твоим советом два дня, перерыл кучу учебников и весь интернет, но что-то не выходит… подскажи еще один шаг?
0 |
|
2644 / 2220 / 239 Регистрация: 03.07.2012 Сообщений: 8,064 Записей в блоге: 1 |
|
|
02.12.2012, 23:22 |
6 |
|
Решение Представим, что нить резиновая. За время t тело m1 сместится влево и нить удлиниться на t*v1.
3 |
 Сообщение было отмечено как решение
Сообщение было отмечено как решение
|
0 / 0 / 0 Регистрация: 30.11.2012 Сообщений: 4 |
|
|
02.12.2012, 23:26 [ТС] |
7 |
|
Представим, что нить резиновая. За время t тело m1 сместится влево и нить удлиниться на t*v1. все…понял.Благодарю тебя.
0 |
|
IT_Exp Эксперт 87844 / 49110 / 22898 Регистрация: 17.06.2006 Сообщений: 92,604 |
02.12.2012, 23:26 |
|
Помогаю со студенческими работами здесь С каким ускорение а будут двигаться гири? Чему равна сила натяжения Т нити? Определить ускорение грузов и силу натяжения нити, если ось блока движется вверх Грузы, массы которых m1 = 220 г и m2 = 270 г, подвешены на невесомой нити, перекинутой через блок. Определить ускорение системы. Силой трения пренеб Скорость, касательное ускорение, полное ускорение, нормальное ускорение и радиус кривизны траектории Искать еще темы с ответами Или воспользуйтесь поиском по форуму: 7 |
В этой статье мы обсудим, как найти тангенциальное ускорение от различных вращательных движений, решая некоторые задачи с примерами.
Тангенциальное ускорение — это изменение тангенциальной скорости объекта на круговой траектории, перпендикулярной центростремительной силе, действующей внутрь.
Как найти тангенциальное ускорение из угловой скорости?
Вычислив изменение переменной угловой скорости во времени, мы можем найти угловое ускорение и, следовательно, тангенциальное ускорение объекта.
Тангенциальное ускорение можно определить, измерив разницу между тангенциальной скоростью, которая равна произведению угловой скорости на радиус кругового пути, пройденного объектом.
Рассмотрим объект, путешествующий с угловая скорость ω по круговой дорожке радиуса ‘r’.
Пусть «s» — смещение объекта за время «t», а «θ» — угол, образованный за счет смещения объекта. Следующий рисунок представляет то же самое.

По геометрии длина дуги s круга, охваченного объектом за время t, будет равна
s = г1 — (XNUMX)
Здесь, в приведенном выше уравнении, есть две переменные. Местоположение объекта смещается по круговой траектории, составляющей угол θ в диапазоне 0–360°.0. Следовательно, мы можем переписать приведенное выше уравнение как
Δs=rΔθ
При делении обеих частей на переменную времени имеем
Δs/θt=rΔθ/Δt
Тангенциальная скорость объекта — это смещение объекта между двумя интервалами времени. Это то же самое, что v=Δs/Δt}; а угловое смещение объекта при изменении времени равно угловой скорости объекта. Следовательно, предыдущее уравнение принимает вид
v=rω — (2)
Где v — тангенциальная скорость
Если ω является угловая скорость объекта, то угловое ускорение объекта будет
α = Δω/ Δt — (3)
Где α — угловое ускорение объекта.
Тангенциальное ускорение частицы — это изменение радиальной скорости объекта во времени, изменяющееся при изменении направления скорости.

Приведенное выше уравнение показывает взаимосвязь между тангенциальным ускорением и угловой скоростью объекта. Тангенциальное ускорение равно отношению изменения угловых скоростей объекта во времени и прямо пропорционально радиусу кругового пути, пройденного объектом.
Подробнее о Угловое ускорение.
Как найти тангенциальное ускорение при круговом движении?
Центростремительная сила удерживает тело в круговом движении, а направление тангенциальной скорости остается перпендикулярным этой силе.
Тангенциальное ускорение при круговом движении — это изменение скорости, вызванное изменением направления углового ускорения объекта.
Рассмотрим объект, движущийся в круговое движение под действием силы равна центростремительной силе.
Ф=Фc
Пусть «r» — радиус окружности, а v и a — радиальная скорость и радиальное ускорение соответственно.
ма=мв2/r
а=в2/ г — (6)
Подставляя уравнение (2) в приведенное выше уравнение, мы имеем
а=rω2 -(Один)
Это радиальное ускорение объекта, а тангенциальное ускорение объекта будет
at=dv/dt=rdω/dt=rα
Где ω — угловая скорость, а
α — угловое ускорение объекта
Полное ускорение объекта при круговом движении будет векторной суммой тангенциального ускорения и радиального ускорения.
А также,
Следовательно,
Как найти тангенциальное ускорение без учета времени?
Компания тангенциальное ускорение зависит от углового ускорение объекта.
Тангенциальное ускорение — это коэффициент изменения тангенциальной скорости, возникающей из-за изменения направления пути объекта во времени.
Ссылаясь на приведенное выше уравнение № (5), мы можем написать
at=rα—(10)
Это уравнение показывает связь между тангенциальной ускорение и угловой ускорение тела не зависит от времени.
Как найти тангенциальное ускорение маятника?
Маятник совершает гармонические колебания, составляющие угол θ по длине струны.
Возвращающая сила, действующая на струну, возвращает маятник в исходное положение, действующее по касательной к дуге. На его основе можно найти тангенциальное ускорение маятника.
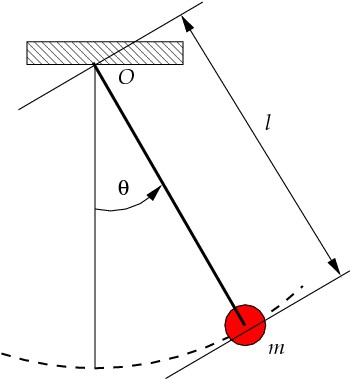
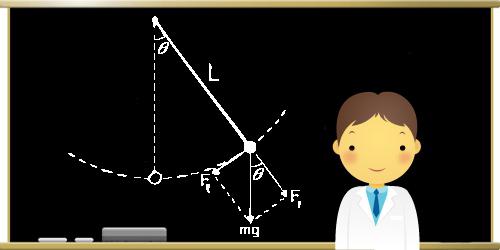
Рассмотрим маятник в СГМ. Нить длины «L» прикреплена к грузу массой «m». Пусть ‘s’ будет смещением боба из-за гармонического движения.

По длине струны действует сила, равная mgCosθ, которая компенсируется натяжением струны. Возвращающая сила, действующая на груз, определяется выражением
F=-mgSinθ
ма=-mgSinθ
Для малых углов

а = гθ
Угол θ можно рассчитать, измерив длину дуги и разделив ее на длину струны.
θ = с/л
Следовательно, приведенное выше уравнение становится
а=гс/л
Тангенциальное ускорение маятника равно ускорению свободного падения и перемещению груза на длину нити.
Как найти тангенциальное ускорение с учетом времени?
Тангенциальная скорость будет увеличиваться со временем, если скорость тангенциального ускорения положительна.
Тангенциальное ускорение можно рассчитать, найдя разницу в радиальной скорости объекта, которая, очевидно, меняется, поскольку направление объекта с угловой скоростью продолжает меняться со временем.
Это дается формулой
at=двt/ дт
Где vt это радиальная скорость
Подробнее о Как найти ускорение на графике скорости: задачи и примеры.
Часто задаваемые вопросы
Задача 1: Объект движется с ускорением по окружности радиусом 10 м. Угловая скорость объекта увеличивается до 6 м/с с 4 м/с между временными интервалами в 4 секунды. Вычислите тангенциальное ускорение тела.
Данный: r = 10 м
ω1= 4 м / с
ω2= 6 м / с
Δt=4 сек
Поэтому тангенциальное ускорение равно
=10 х (6-4)/4
=10 х 2/4=5 м/с2
Следовательно, тангенциальное ускорение тела равно 5 м/с.2.
Задача 2: Рассчитайте тангенциальное ускорение и угловое ускорение мяча, движущегося по круговой траектории радиусом 5 метров со скоростью от 2 м/с до 4 м/с за 4 секунды.
Данный: V1= 2 м / с
V2= 4 м / с
Т=4с
Р=5м
Касательное ускорение равно
Поскольку, аt=rα
α = аt/r
α = 0.5 м/с2/5м=0.1 радиан/с2
Компания угловое ускорение мяча 0.1 радиан/с2.
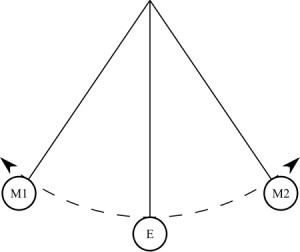
Механическая система, которая состоит из материальной точки (тела), висящей на нерастяжимой невесомой нити (ее масса ничтожно мала по сравнению с весом тела) в однородном поле тяжести, называется математическим маятником (другое название – осциллятор). Бывают и другие виды этого устройства. Вместо нити может быть использован невесомый стержень. Математический маятник может наглядно раскрыть суть многих интересных явлений. При малой амплитуде колебания его движение называется гармоническим.
Общие сведения о механической системе

Формула периода колебания этого маятника была выведена голландским ученым Гюйгенсом (1629-1695 гг.). Этот современник И. Ньютона очень увлекался данной механической системой. В 1656 г. он создал первые часы с маятниковым механизмом. Они измеряли время с исключительной для тех времен точностью. Это изобретение стало важнейшим этапом в развитии физических экспериментов и практической деятельности.
Если маятник находится в положении равновесия (висит отвесно), то сила тяжести будет уравновешиваться силой натяжения нити. Плоский маятник на нерастяжимой нити является системой с двумя степенями свободы со связью. При смене всего одного компонента меняются характеристики всех ее частей. Так, если нитку заменить на стержень, то у данной механической системы будет всего 1 степень свободы. Какими же свойствами обладает математический маятник? В этой простейшей системе под воздействием периодического возмущения возникает хаос. В том случае, когда точка подвеса не двигается, а совершает колебания, у маятника появляется новое положение равновесия. При быстрых колебаниях вверх-вниз эта механическая система приобретает устойчивое положение «вверх тормашками». У нее есть и свое название. Ее называют маятником Капицы.
Свойства маятника
Математический маятник имеет очень интересные свойства. Все они подтверждаются известными физическими законами. Период колебаний любого другого маятника зависит от разных обстоятельств, таких как размер и форма тела, расстояние между точкой подвеса и центром тяжести, распределение массы относительно данной точки. Именно поэтому определение периода висящего тела является довольно сложной задачей. Намного легче вычисляется период математического маятника, формула которого будет приведена ниже. В результате наблюдений над подобными механическими системами можно установить такие закономерности:
• Если, сохраняя одинаковую длину маятника, подвешивать различные грузы, то период их колебаний получится одинаковым, хотя их массы будут сильно различаться. Следовательно, период такого маятника не зависит от массы груза.
• Если при запуске системы отклонять маятник на не слишком большие, но разные углы, то он станет колебаться с одинаковым периодом, но по разным амплитудам. Пока отклонения от центра равновесия не слишком велики, колебания по своей форме будут достаточно близки гармоническим. Период такого маятника никак не зависит от колебательной амплитуды. Это свойство данной механической системы называется изохронизмом (в переводе с греческого «хронос» — время, «изос» — равный).
Период математического маятника
Этот показатель представляет собой период собственных колебаний. Несмотря на сложную формулировку, сам процесс очень прост. Если длина нити математического маятника L, а ускорение свободного падения g, то эта величина равна:
T = 2π√L/g
Период малых собственных колебаний ни в какой мере не зависит от массы маятника и амплитуды колебаний. В этом случае маятник двигается как математический с приведенной длиной.
Колебания математического маятника
Математический маятник совершает колебания, которые можно описать простым дифференциальным уравнением:
x + ω2 sin x = 0,
где х (t) – неизвестная функция (это угол отклонения от нижнего положения равновесия в момент t, выраженный в радианах); ω – положительная константа, которая определяется из параметров маятника (ω = √g/L, где g – это ускорение свободного падения, а L – длина математического маятника (подвес).
Уравнение малых колебаний вблизи положення равновесия (гармоническое уравнение) выглядит так:
x + ω2 sin x = 0
Колебательные движения маятника
Математический маятник, который совершает малые колебания, двигается по синусоиде. Дифференциальное уравнение второго порядка отвечает всем требованиям и параметрам такого движения. Для определения траектории необходимо задать скорость и координату, из которых потом определяются независимые константы:
x = A sin (θ0 + ωt),
где θ0 – начальная фаза, A – амплитуда колебания, ω – циклическая частота, определяемая из уравнения движения.
Математический маятник (формулы для больших амплитуд)
Данная механическая система, совершающая свои колебания со значительной амплитудой, подчиняется более сложным законам движения. Для такого маятника они рассчитываются по формуле:
sin x/2 = u * sn(ωt/u),
где sn — синус Якоби, который для u < 1 является периодической функцией, а при малых u он совпадает с простым тригонометрическим синусом. Значение u определяют следующим выражением:
u = (ε + ω2)/2ω2,
где ε = E/mL2 (mL2 – энергия маятника).
Определение периода колебания нелинейного маятника осуществляется по формуле:
T = 2π/Ω,
где Ω = π/2 * ω/2K(u), K – эллиптический интеграл, π — 3,14.
Движение маятника по сепаратрисе
Сепаратрисой называют траекторию динамической системы, у которой двумерное фазовое пространство. Математический маятник движется по ней непериодически. В бесконечно дальнем моменте времени он падает из крайнего верхнего положения в сторону с нулевой скоростью, затем постепенно набирает ее. В конечном итоге он останавливается, вернувшись в исходное положение.
Если амплитуда колебаний маятника приближается к числу π, это говорит о том, что движение на фазовой плоскости приближается к сепаратрисе. В этом случае под действием малой вынуждающей периодической силы механическая система проявляет хаотическое поведение.
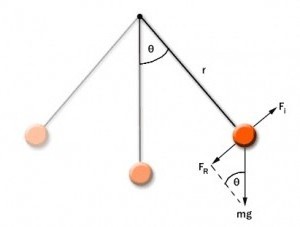
При отклонении математического маятника от положения равновесия с некоторым углом φ возникает касательная силы тяжести Fτ = –mg sin φ. Знак «минус» означает, что эта касательная составляющая направляется в противоположную от отклонения маятника сторону. При обозначении через x смещения маятника по дуге окружности с радиусом L его угловое смещение равняется φ = x/L. Второй закон Исаака Ньютона, предназначенный для проекций вектора ускорения и силы, даст искомое значение:
mg τ = Fτ = –mg sin x/L
Исходя из этого соотношения, видно, что этот маятник представляет собой нелинейную систему, поскольку сила, которая стремится вернуть его в положение равновесия, всегда пропорциональна не смещению x, а sin x/L.
Только тогда, когда математический маятник осуществляет малые колебания, он является гармоническим осциллятором. Иными словами, он становится механической системой, способной выполнять гармонические колебания. Такое приближение практически справедливо для углов в 15–20°. Колебания маятника с большими амплитудами не является гармоническим.
Закон Ньютона для малых колебаний маятника

Если данная механическая система выполняет малые колебания, 2-й закон Ньютона будет выглядеть таким образом:
mg τ = Fτ = –m* g/L* x.
Исходя из этого, можно заключить, что тангенциальное ускорение математического маятника пропорционально его смещению со знаком «минус». Это и является условием, благодаря которому система становится гармоническим осциллятором. Модуль коэффициента пропорциональности между смещением и ускорением равняется квадрату круговой частоты:
ω02 = g/L; ω0 = √ g/L.
Эта формула отражает собственную частоту малых колебаний этого вида маятника. Исходя из этого,
T = 2π/ ω0 = 2π√ g/L.
Вычисления на основе закона сохранения энергии
Свойства колебательных движений маятника можно описать и при помощи закона сохранения энергии. При этом следует учитывать, что потенциальная энергия маятника в поле тяжести равняется:
E = mg∆h = mgL(1 – cos α) = mgL2sin2 α/2
Полная механическая энергия равняется кинетической или максимальной потенциальной: Epmax = Ekmsx = E
После того как будет записан закон сохранения энергии, берут производную от правой и левой частей уравнения:
Ep + Ek = const
Поскольку производная от постоянных величин равняется 0, то (Ep + Ek)’ = 0. Производная суммы равняется сумме производных:
Ep’ = (mg/L*x2/2)’ = mg/2L*2x*x’ = mg/L*v + Ek’ = (mv2/2) = m/2(v2)’ = m/2*2v*v’ = mv* α,
следовательно:
Mg/L*xv + mva = v (mg/L*x + m α) = 0.
Исходя из последней формулы находим: α = — g/L*x.
Практическое применение математического маятника
Ускорение свободного падения изменяется с географической широтой, поскольку плотность земной коры по всей планете не одинакова. Там, где залегают породы с большей плотностью, оно будет несколько выше. Ускорение математического маятника нередко применяют для геологоразведки. В его помощью ищут различные полезные ископаемые. Просто подсчитав количество колебаний маятника, можно обнаружить в недрах Земли каменный уголь или руду. Это связано с тем, что такие ископаемые имеют плотность и массу больше, чем лежащие под ними рыхлые горные породы.
Математическим маятником пользовались такие выдающиеся ученые, как Сократ, Аристотель, Платон, Плутарх, Архимед. Многие из них верили в то, что эта механическая система может влиять на судьбу и жизнь человека. Архимед использовал математический маятник при своих вычислениях. В наше время многие оккультисты и экстрасенсы пользуются этой механической системой для осуществления своих пророчеств или поиска пропавших людей.
Известный французский астроном и естествоиспытатель К. Фламмарион для своих исследований также использовал математический маятник. Он утверждал, что с его помощью ему удалось предсказать открытие новой планеты, появление Тунгусского метеорита и другие важные события. Во время Второй мировой войны в Германии (г. Берлин) работал специализированный Институт маятника. В наши дни подобными исследованиями занят Мюнхенский институт парапсихологии. Свою работу с маятником сотрудники этого заведения называют «радиэстезией».
Уравнение ускорения и натяжения нити
Динамика: движения системы связанных тел.
Проецирование сил нескольких объектов.
Действие второго закона Ньютона на тела, которые скреплены нитью
Если ты, дружок, позабыл, как силушку проецировать, советую мыслишки в своей головушке освежить.
А для тех, кто все помнит, поехали!
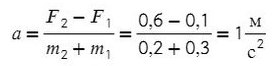
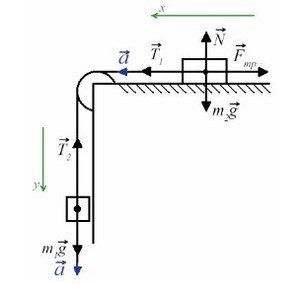
Задача 1. На гладком столе лежат два связанных невесомой и нерастяжимой ниткой бруска с массой 200 г левого и массой правого 300 г. К первому приложена сила 0,1 Н, к левому — в противоположном направлении сила 0,6 Н. С каким ускорением движутся грузы?
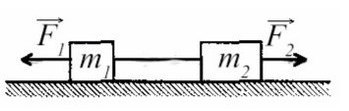
Движение происходит только на оси X.
Т.к. к правому грузу приложена большая сила, движение данной системы будет направлено вправо, поэтому направим ось так же. Ускорение у обоих брусков будет направлено в одну сторону — сторону большей силы.
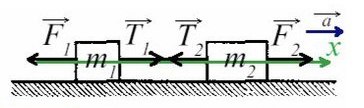
По II з. Ньютона спроецируем силы обоих тел на Ох:
Сложим верхнее и нижнее уравнение. Во всех задачах, если нет каких-то условий сила натяжения у разных тел одинакова T ₁ и Т ₂.
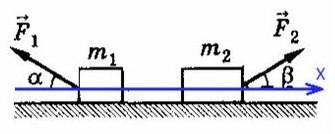
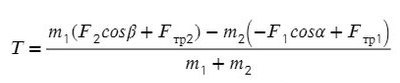
Задача 2. Два бруска, связанные нерастяжимой нитью, находятся на горизонтальной плоскости. К ним приложены силы F₁ и F₂, составляющие с горизонтом углы α и β. Найти ускорение системы и силу натяжения нити. Коэффициенты трения брусков о плоскость одинаковы и равны μ. Силы F₁ и F₂ меньше силы тяжести брусков. Система движется влево. 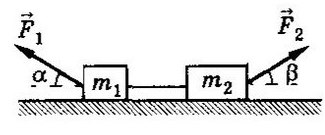
Cистема движется влево, однако ось можно направить в любую сторону (дело лишь в знаках, можете поэксперментировать на досуге). Для разнообразия направим вправо, против движения всей системы, мы же любим минусы! Спроецируем силы на Ох (если с этим сложности — вам сюда ).
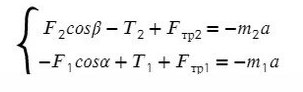
По II з. Ньютона спроецируем силы обоих тел на Ох:
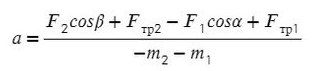
Сложим уравнения и выразим ускорение:

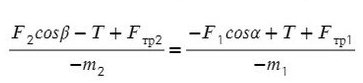
Выразим натяжение нити. Для этого приравняем ускорение из обоих уравнений системы:


Задача 3 . Через неподивжный блок перекинуты нить, к которой подвешены три одинаковых груза (два с одной стороны и один с другой) массой 5 кг каждый. Найти ускорение системы. Какой путь пройдут грузы за первые 4 с движения?
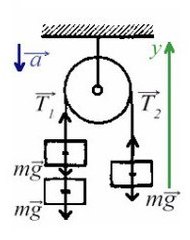
В данной задаче можно представить, что два левых груза скреплены вместе без нити, это избавит нас от проецирования взаимно равных сил.
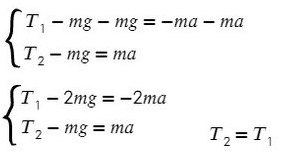
Вычтем из первого уравнения второе:
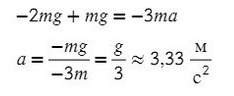
Зная ускорение и то, что начальная скорость равна нулю, используем формулу пути для равноускоренного движения:

Задача 4. Два груза массами 4 кг и 6 кг соединены легкой нерастяжимой нитью. Коэффициенты трения между грузом и столом μ = 0,2. Определите ускорение, с которым будут двигаться грузы.
Запишем движение тел на оси, из Oy найдем N для силы трения (Fтр = μN):
(Если сложно понять, какие уравнения понадобятся для решения задачи, лучше запишите все)
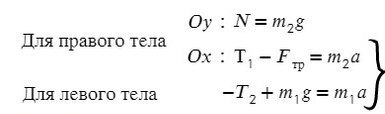
Сложим два нижних уравнения для того, чтобы T сократилось:


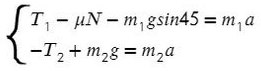
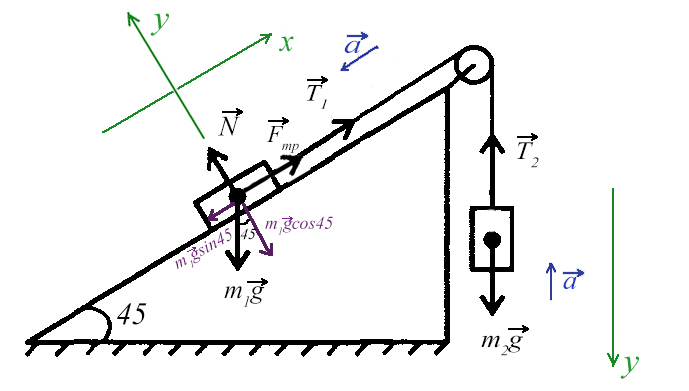
Задача 5. На наклонной поскости с углом наклона 45° лежит брускок массой 6 кг. Груз массой 4 кг присоединен к бруску при помощи нити и перекинут через блок. Определите натяжение нити, если коэффициент трения бруска о плоскость μ = 0,02. При каких значениях μ система будет в равновесии?
Ось направим произвольно и предположим, что правый груз перевешивает левый и поднимает его вверх по наклонной плоскости.
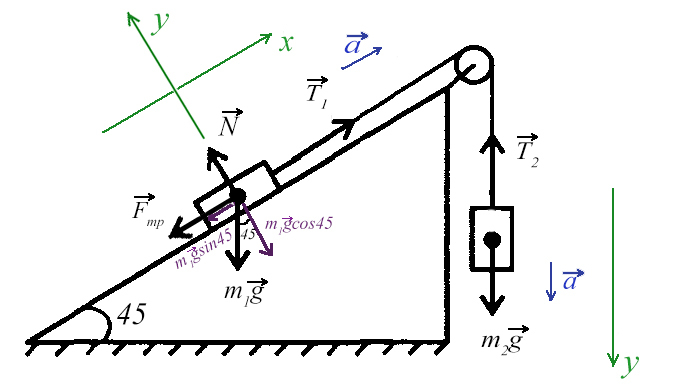
Из уравнения на ось Y выразим N для силы трения на ось Х (Fтр = μN):
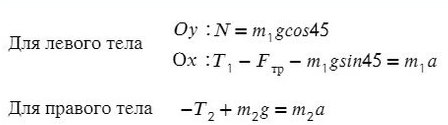
Решим систему, взяв уравнение для левого тела по оси Х и для правого тела по оси Y:
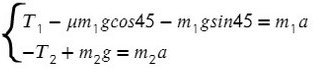
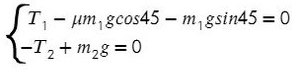
Выразим ускорение, чтобы осталась одна неизвестная T, и найдем ее:




Система будет в равновесии. Это означает, что сумма всех сил, действующих на каждое из тел, будет равна нулю:
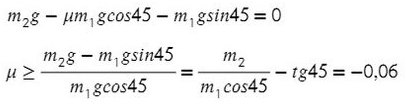
Получили отрицательный коэффициент трения, значит, движение системы мы выбрали неверно (ускорение, силу трения). Можно это проверить, подставив силу натяжения нити Т в любое уравнение и найдя ускорение. Но ничего страшного, значения остаются теми же по модулю, но противоположными по направлению.
Значит, правильное направление сил должно выглядить так, а коэффициент трения, при котором система будет в равновесии, равен 0,06.
Задача 6. На двух наклонных плоскостях находится по грузу массами 1 кг. Угол между горизонталью и плоскостями равен α = 45° и β = 30°. Коэффициент трения у обеих плоскостей μ = 0,1. Найдите ускорение, с которым движутся грузы, и силу натяжения нити. Каким должно быть отношение масс грузов, чтобы они находились в равновесии.
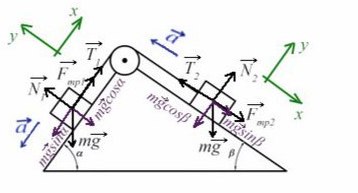
В данной задаче уже потребуются все уравнения на обе оси для каждого тела:
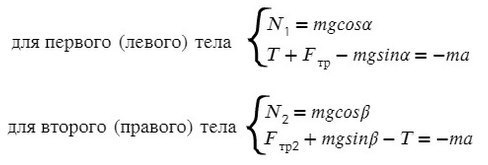
Найдем N в обоих случаях, подставим их в силу трения и запишем вместе уравнения для оси Х обоих тел:
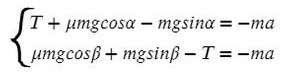
Сложим уравнения и сократим на массу:


Подставив в любое уравнение найденное ускорение, найдем Т:
 А теперь одолеем последний пункт и разберемся с соотношением масс. Сумма всех сил, действующих на любое из тел, равна нулю для того, чтобы система находилась в равновесии:
А теперь одолеем последний пункт и разберемся с соотношением масс. Сумма всех сил, действующих на любое из тел, равна нулю для того, чтобы система находилась в равновесии:


Все, что с одной массой, перенесем в одну часть, все остальное — в другую часть уравнения:

Получили, что отношение масс должно быть таким:
Однако, если мы предположим, что система может двигаться в другом направлении, то есть правый груз будет перевешивать левый, направление ускорения и силы трения изменится. Уравнения останутся такими же, а вот знаки будут другими, и тогда отношение масс получится таким:
Тогда при соотношении масс от 1,08 до 1,88 система будет находиться в покое.
У многих может сложиться впечатление, что соотношение масс должно быть каким-то конкретным значением, а не промежутком. Это правда, если отстутвует сила трения. Чтобы уравновешивать силы тяжести под разными углами, найдется только один варинт, когда система находится в покое.
В данном же случае сила трения дает диапазон, в котором, пока сила трения не будет преодолена, движения не начнется.
Формула силы натяжения нити
Определение и формула силы натяжения нити
Силу натяжения определяют как равнодействующую сил $(bar)$, приложенных к нити, равную ей по модулю, но противоположно направленную. Устоявшегося символа (буквы), обозначающего силу натяжения нет. Ее обозначают и просто $bar$ и $bar$, и $bar$ . Математически определение для силы натяжения нити можно записать как:
где $bar$ = векторная сумма всех сил, которые действуют на нить. Сила натяжения нити всегда направлена по нити (или подвесу).
Чаще всего в задачах и примерах рассматривают нить, массой которой можно пренебречь. Ее называют невесомой.
Еще одним важной характеристикой нити при расчете силы натяжения является ее растяжимость. Если исследуется невесомая и нерастяжимая нить, то такая нить считается просто проводящей через себя силу. В том случае, когда необходимо учитывать растяжение нити, применяют закон Гука, при этом:
где k – коэффициент жесткости нити, $Delta l$ – удлинение нити при растяжении.
Единицы измерения силы натяжения нити
Основной единицей измерения силы натяжения нити (как и любой силы) в системе СИ является: [T]=Н
Примеры решения задач
Задание. Невесомая, нерастяжимая нить выдерживает силу натяжения T=4400Н. С каким максимальным ускорением можно поднимать груз массой m=400 кг, который подвешивают на эту нить, чтобы она не разорвалась?
Решение. Изобразим на рис.1 все силы, действующие на груз, и запишем второй закон Ньютона. Тело будем считать материальной точкой, все силы приложенными к центру масс тела.
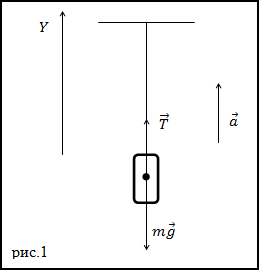
где $bar$ – сила натяжения нити. Запишем проекцию уравнения (1.1) на ось Y:
Из выражения (1.2) получим ускорение:
Все данные в задаче представлены в единицах системы СИ, проведем вычисления:
Ответ. a=1,2м/с 2

Задание. Шарик, имеющий массу m=0,1 кг прикрепленный к нити (рис.2) движется по окружности, расположенной в горизонтальной плоскости. Найдите модуль силы натяжения нити, если длина нити l=5 м, радиус окружности R=3м.
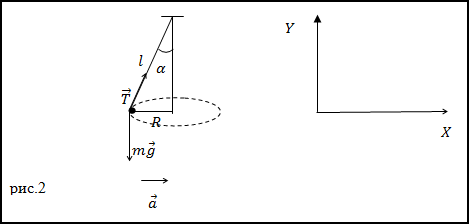
Решение. Запишем второй закон Ньютона для сил, приложенных к шарику, который вращается по окружности с центростремительным ускорением:
Найдем проекции данного уравнения на обозначенные на рис.2 оси X и Y:
$$ begin X: quad T sin alpha=m a=m omega^ <2>R(2.2) \ Y: quad-m g+T cos alpha=0 end $$
Из уравнения (2.3) получим формулу для модуля силы натяжения нити:
Из рис.2 видно, что:
Подставим (2.5) вместо $cos alpha$ в выражение (2.4), получим:
Так как все данные в условиях задачи приведены в единицах системы СИ, проведем вычисления:
iSopromat.ru

Пример расчета ускорения груза и натяжения нитей для заданной механической системы, движущейся из состояния покоя, без учета моментов сопротивления в подшипниках и массы нерастяжимых нитей.
Условие задачи
Для заданной механической системы определить ускорение груза и натяжения нитей.
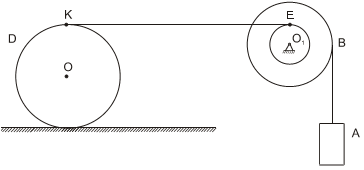
Система движется из состояния покоя, моменты сопротивления в подшипниках не учитывать, массами нитей пренебречь, нити не растяжимы (рис. 2.1).
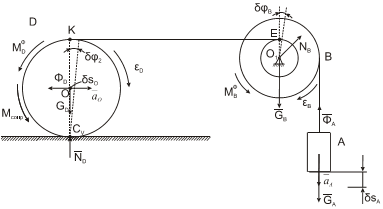
Пример решения
Определим направление движения системы, указав направление ускорения груза A, покажем на рис. 2.2. задаваемые силы: GA, GB, GD реакции связей NB, ND (направление NB пока неизвестно). Силы инерции для тела A приводятся к главному вектору сил инерции ФА=mA∙aA, для тела B к главному моменту сил инерции MB Ф =JB∙εB, для тела D, совершающего плоское движение к главному вектору сил инерции ФD=mD∙aD и к главному моменту сил инерции MD Ф =JD∙εD. Коэффициент трения качения определяет наличие момента сопротивления
Ускорения и перемещения точек системы получаются дифференцированием и интегрированием зависимостей между линейными и угловыми скоростями точек системы.
Приняв скорость груза VA, получим соотношения
Можно продифференцировать и проинтегрировать выше приведенные формулы и получить выражения
Сообщим системе возможное перемещение в направлении ее действительного движения. Силы и моменты, действующие на систему, совершат элементарную работу. Сумма всех работ должна быть равна нолю. Момент сопротивления отнесем к внешним воздействиям. Это позволит считать данную систему идеальной. Составим общее уравнение динамики (уравнение работ):
Подставим данные задачи и получим:

Сократив на δSA — задаваемое нами возможное перемещение груза А получим:

Из этого соотношения определим ускорение груза

Из найденных ранее соотношений можно определить: εB, a0, εD.
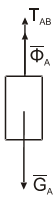
При решении задачи этим методом внутренние силы в уравнения не входят. Для определения натяжения нитей нужно сделать эти силы внешними, для чего разделяем систему на части. Рассмотрим отдельно груз А, на который действуют силы ФA, GA и сила TAB, ставшая внешней (рис. 2.3). Для этой системы можно написать или принцип Даламбера или общее уравнение динамики.
Находим натяжение нити:
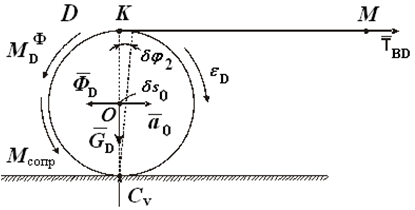
Для определения натяжения нити между телами B и D можно составить общее уравнение динамики (или написать принцип Даламбера) для тела B или D.
Рассмотрим тело D (рис. 2.4). Покажем действующие внешние силы и силы инерции. Натяжение нити ТBD стало внешней силой. Приняв за возможное перемещение угол поворота тела D — δφD составим уравнение работ.

Для проверки результатов можно написать общее уравнение динамики (или принцип Даламбера) для блока B.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
http://www.webmath.ru/poleznoe/formules_21_30_sila_natjazhenija_niti.php
Применение общего уравнения динамики к исследованию движения
Содержание:
Гармонические колебания:
Некоторые движения, встречающиеся в быту, за равные промежутки времени повторяются. Такое движение называется периодическим движением. Часто встречается движение, при котором тело перемещается то в одну, то в другую сторону относительно равновесного состояния. Такое движение тела называется колебательным движением или просто колебанием.
Колебания, совершаемые телом, которое выведено из равновесного состояния в результате действия внутренних сил, называются собственными (свободными) колебаниями. Величина удаления от равновесного состояния колеблющегося тела называется его смещением (
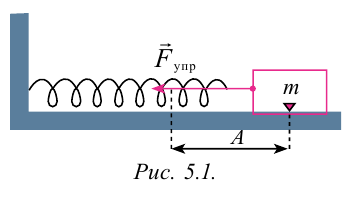
Для наблюдения механических колебаний ознакомимся с колебаниями груза, закрепленного на конце пружины (рис. 5.1). На этом рисунке груз, закрепленный на пружине, сможет двигаться без трения с горизонтальным стержнем, так как силу тяжести шарика приводит в равновесие реакционная сила стержня.
Коэффициент упругости пружины –  , а ее масса ничтожна мала и можно ее не учитывать. Считаем, что масса системы сосредоточена в грузе, а упругость в пружине.
, а ее масса ничтожна мала и можно ее не учитывать. Считаем, что масса системы сосредоточена в грузе, а упругость в пружине.
Если груз, который находится в равновесии, потянем вправо на расстояние  и отпустим, то под действием силы упругость, которая появляется в пружине, груз смещается в
и отпустим, то под действием силы упругость, которая появляется в пружине, груз смещается в
сторону равновесного состояния.

С течением времени смещение груза уменьшается относительно  , но скорость груза при этом увеличивается. Когда груз доходит до равновесного состояния, его смещение (
, но скорость груза при этом увеличивается. Когда груз доходит до равновесного состояния, его смещение ( ) равняется нулю и соответственно сила упругости равняется нулю. Но груз по инерции начинает двигаться в левую сторону. Модуль силы упругости, которая появляется в пружине, тоже растет. Однако из-за того, что сила упругости постоянно направлена против смещения груза, она начинает тормозить груз. В результате движение груза замедляется, и, в результате, прекращается. Теперь груз под воздействием эластической силы сжатой пружины начинает двигаться в сторону равновесного состояния.
) равняется нулю и соответственно сила упругости равняется нулю. Но груз по инерции начинает двигаться в левую сторону. Модуль силы упругости, которая появляется в пружине, тоже растет. Однако из-за того, что сила упругости постоянно направлена против смещения груза, она начинает тормозить груз. В результате движение груза замедляется, и, в результате, прекращается. Теперь груз под воздействием эластической силы сжатой пружины начинает двигаться в сторону равновесного состояния.
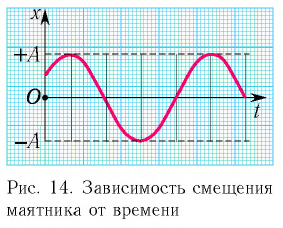
Для определения закономерности изменения в течение времени системы, которая периодически совершает колебания, заполним воронку песком, подвесим на веревке, подложим бумагу под систему и раскачаем воронку. В ходе колебания начинаем равномерно вытягивать бумагу из-под системы. В результате мы увидим, что следы песка на бумаге образуют синусоиду. Из этого можно сделать следующий вывод: смещение периодически колеблющегося тела по истечении времени изменяется по закону синусов и косинусов. При этом самое большое значение смещения равняется амплитуде ():

здесь:  – циклическая частота, зависящая от параметров колеблющихся систем,
– циклическая частота, зависящая от параметров колеблющихся систем,  – начальная фаза, (
– начальная фаза, ( ) фаза колебания с течением времени
) фаза колебания с течением времени  .
.
Из математики известно, что  поэтому формулу (5.2.) можно записать в виде
поэтому формулу (5.2.) можно записать в виде

Колебания, в которых с течением времени параметры меняются по закону синуса или косинуса, называются гармоническими колебаниями.
Значит, пружинный маятник, вышедший из равновесного состояния, совершает гармоническое колебание. Для того чтобы система совершала гармоническое колебание: 1) при выходе тела из равновесного состояния, для возвращения его в равновесное состояние должна появиться внутренняя сила; 2) колеблющееся тело должно обладать инертностью и на него не должны оказывать воздействие силы трения и сопротивления. Эти условия называется условиями проявления колебательных движений.
Основные параметры гармонических колебаний
a) период колебания  – время одного полного колебания:
– время одного полного колебания:
 )
)
б) частота колебания  – количество колебаний, совершаемых за 1 секунду:
– количество колебаний, совершаемых за 1 секунду:

Единица 
c) циклическая частота  – количество колебаний за
– количество колебаний за  секунд:
секунд:

С учетом формул (5.5) и (5.6) уравнение гармонических колебаний (5.2) можно записать в следующей форме.

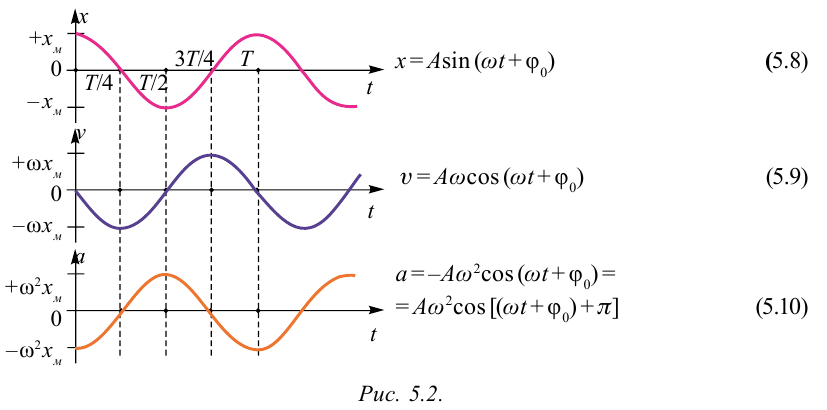
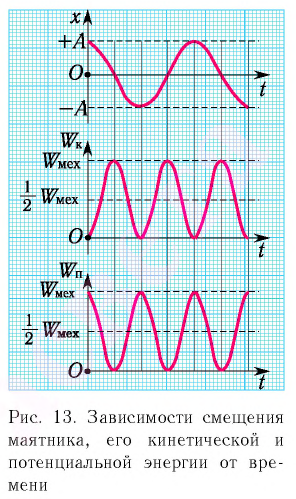
Большинство величин, количественно описывающих гармонические колебания, смещения которых с течением времени меняются по закону синусов или косинусов (скорость, ускорение, кинетическая и потенциальная энергия), тоже гармонически меняются.
Это подтверждается следующими графиками и уравнениями:
Пример решения задачи:
Точка совершает гармоническое колебательное движение. Максимальное смещение и скорость соответственно равны 0,05 м и 0,12 м/с. Найдите максимальное ускорение и скорость колебательного движения, а также ускорение точки в момент, когда смещение равно 0,03 м.
Дано:
Найти:

Формула и решение:
Гармонические колебания пружинного маятника
В 1985 году в городе Мехико произошла ужасная катастрофа, причина которой было землетрясение: 5526 человек погибли, 40 ООО человек ранены, 31000 человек остались без крова. Из проведенных затем исследований ученые выяснили, что главной причиной разрушений во время землетрясения является совпадение частоты свободных колебаний зданий с частотой вынужденных колебаний Земли. Поэтому при возведении новых зданий в сейсмически активной зоне необходимо, чтобы эти частоты не совпадали. Это даст возможность уменьшить последствия землетрясения. С этой целью важно знать, от чего зависят частота и период колебаний.
Одной из простейших колебательных систем, совершающих гармонические колебания, является пружинный маятник.
Пружинный маятник — это колебательная система, состоящая из пружины и закрепленного на ней тела. Колебания, возникающие в пружинном маятнике, являются гармоническими колебаниями:
Под гармоническими колебаниями подразумеваются колебания, возникающие под действием силы, прямо пропорциональной перемещению и направленной против направления перемещения.
Исследование колебаний пружинного маятника имеет большое практическое значение, например, при вычислении колебаний рессор автомобиля при езде; в исследовании воздействия колебаний на фундамент зданий и тяжелых станков, в определении эластичности ушных перепонок при диагностике лор-заболеваний. По этой причине изучение колебаний пружинного маятника является актуальной проблемой.
С целью уменьшения количества сил, действующих на колебательную систему, целесообразно использовать горизонтально расположенную колебательную систему пружина-шарик (d).
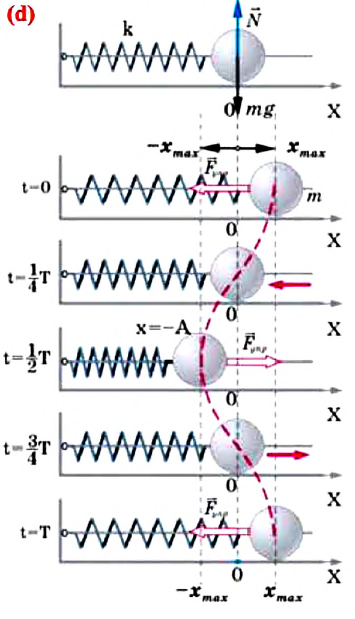
В этой системе действия силы тяжести и реакции опоры уравновешивают друг друга. При выведении шарика из состоянии равновесия, например, при растяжении пружины до положения  сила упругости, возникающая в ней, сообщает шарику ускорение и приводит его в колебательное движение. По II закону Ньютона уравнение движения маятника можно записать так:
сила упругости, возникающая в ней, сообщает шарику ускорение и приводит его в колебательное движение. По II закону Ньютона уравнение движения маятника можно записать так:

или
Формула (4.9) является уравнением свободных гармонических колебаний пружинного маятника.
Где  — масса шарика, закрепленного на пружине,
— масса шарика, закрепленного на пружине,  — проекция ускорения шарика вдоль оси
— проекция ускорения шарика вдоль оси  — жесткость пружины,
— жесткость пружины,  -удлинение пружины, равное амплитуде колебания. Для данной колебательной системы отношение
-удлинение пружины, равное амплитуде колебания. Для данной колебательной системы отношение  — постоянная положительная величина (так как масса и жесткость не могут быть отрицательными). При сравнении уравнения колебаний (4.9) пружинного маятника с выражением для другого вида периодического движения — известным выражением центростремительного ускорения при равномерном движении по окружности получается, что отношение
— постоянная положительная величина (так как масса и жесткость не могут быть отрицательными). При сравнении уравнения колебаний (4.9) пружинного маятника с выражением для другого вида периодического движения — известным выражением центростремительного ускорения при равномерном движении по окружности получается, что отношение  соответствует квадрату циклической частоты
соответствует квадрату циклической частоты 
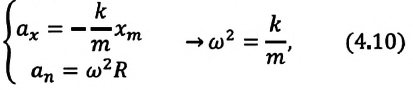
или
Таким образом, уравнение движения пружинного маятника можно записать и так:

Уравнение (4.12) показывает, что колебания пружинного маятника с циклической частотой  являются свободными гармоническими колебаниями. Из математики известно, что решением этого уравнения является:
являются свободными гармоническими колебаниями. Из математики известно, что решением этого уравнения является:

Так как тригонометрическая функция является гармонической функцией, то и колебания пружинного маятника являются гармоническими колебаниями.
Здесь  фаза колебания,
фаза колебания,  — начальная фаза. Единица измерения фазы в СИ — радиан (1 рад). Фазу также можно измерять в градусах:
— начальная фаза. Единица измерения фазы в СИ — радиан (1 рад). Фазу также можно измерять в градусах:  Значение начальной фазы зависит от выбора начального момента времени. Начальный момент времени можно выбрить так, чтобы
Значение начальной фазы зависит от выбора начального момента времени. Начальный момент времени можно выбрить так, чтобы  В этом случае формулу гармонических колебаний пружинного маятника можно записать так:
В этом случае формулу гармонических колебаний пружинного маятника можно записать так:
 или
или 
Из сравнения выражений (4.11) и (4.5) определяются величины, от которых зависят период и частота колебаний пружинного маятника:
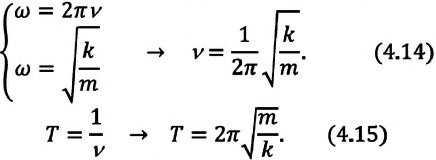
Из выражений (4.14) и (4.15) видно, что период и частота пружинного маятника зависят от жесткости пружины и массы груза, подвешенного к нему.
Гармонические колебания математического маятника
До наших дней дошла такая историческая информация: однажды в 1583 году итальянский ученый Г. Галилей, находясь в храме города Пиза, обратил внимание на колебательное движение люстры, подвешенной на длинном тросе. Он, сравнивая колебания люстры со своим пульсом, определил, что, несмотря на уменьшение амплитуды колебания, время, затрачиваемое на одно полное колебание (период колебания) люстры, не изменяется. Затем Галилей в результате многочисленных проведенных исследований, изменяя длину нитевого маятника, массу подвешенного к нему груза, высоту расположения маятника (по сравнению с уровнем моря), определил, от чего зависят период и частота колебаний маятника.
Гармонические колебания возникают также под действием силы тяжести. Это можно наблюдать с помощью математического маятника.
Математический маятник — это идеализированная колебательная система, состоящая из материальной точки, подвешенной на невесомой и нерастяжимой нити.
Для исследования колебаний математического маятника можно использовать систему, состоящую из тонкой длинной нити и шарика (b).
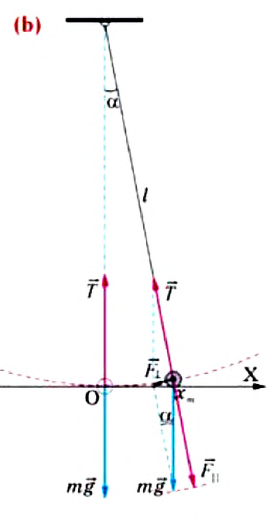
Сила тяжести  действующая на шарик в положении равновесия маятника, уравновешивается силой натяжения нити
действующая на шарик в положении равновесия маятника, уравновешивается силой натяжения нити  Однако, если вывести маятник из состояния равновесия, сместив его на малый угол
Однако, если вывести маятник из состояния равновесия, сместив его на малый угол  в сторону, то возникают две составляющие вектора силы тяжести -направленная вдоль нити
в сторону, то возникают две составляющие вектора силы тяжести -направленная вдоль нити  и перпендикулярная нити
и перпендикулярная нити  Сила натяжения
Сила натяжения  и составляющая силы тяжести
и составляющая силы тяжести  уравновешивают друг друга. Поэтому равнодействующая сила будет равна составляющей
уравновешивают друг друга. Поэтому равнодействующая сила будет равна составляющей  «пытающейся» вернуть тело в положение равновесия (см.: рис. b). Учитывая вышеуказанное и ссылаясь на II закон Ньютона, можно написать уравнение колебательного движения тела массой
«пытающейся» вернуть тело в положение равновесия (см.: рис. b). Учитывая вышеуказанное и ссылаясь на II закон Ньютона, можно написать уравнение колебательного движения тела массой  в проекциях на ось ОХ:
в проекциях на ось ОХ:
Приняв во внимание, что:

Для уравнения движения математического маятника получим:

Где  — длина математического маятника (нити),
— длина математического маятника (нити),  — ускорение свободного падения,
— ускорение свободного падения,  — амплитуда колебания.
— амплитуда колебания.
Для данной колебательной системы отношение  — постоянная положительная величина, потому что ускорение свободного падения и длина нити не могут быть отрицательными. Если сравнить уравнения (4.16) и (4.10), с легкостью можно увидеть, что отношение также соответствует квадрату циклической частоты
— постоянная положительная величина, потому что ускорение свободного падения и длина нити не могут быть отрицательными. Если сравнить уравнения (4.16) и (4.10), с легкостью можно увидеть, что отношение также соответствует квадрату циклической частоты 

или

Таким образом, уравнение движения математического маятника можно записать и так:

Уравнение (4.19) показывает, что колебания математического маятника являются гармоническими колебаниями с циклической частотой со. Из математики вы знаете, что решением этого уравнения является нижеприведенная функция:

Так как эта функция является гармонической, то и колебания математического маятника являются гармоническими колебаниями.
Отсюда определяются величины, от которых зависят период и частота колебаний математического маятника:
Таким образом, период и частота колебаний математического маятника зависят от длины маятника и напряженности гравитационного поля в данной точке.
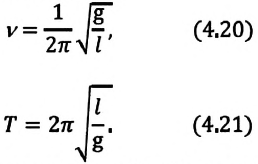
Скорость и ускорение при гармонических колебаниях
Вы уже знакомы с основными тригонометрическими функциями и умеете строить графики тригонометрических уравнений, описывающих гармонические колебания.
При гармонических колебаниях маятника его смещение изменяется по гармоническому закону, поэтому не трудно доказать, что его скорость и ускорение также изменяются по гармоническому закону. Предположим, что смещение изменяется по закону косинуса и начальная фаза равна нулю

Так как скорость является первой производной смещения (координат) по времени, то:

или

Как видно из выражения (4.23), скорость, изменяющаяся по гармоническому закону, опережает колебания смещения по фазе на  (а).
(а).
Максимальное (амплитудное) значение скорости зависит от амплитуды, частоты и периода колебаний:

Так как ускорение является первой производной скорости по времени, то получим:

или

Как видим, колебания ускорения, изменяющегося по гармоническому закону, опережают колебания скорости по фазе на  а колебания смещения на
а колебания смещения на
 (см.: рис. а). Максимальное (амплитудное) значение ускорения зависит от амплитуды, частоты и периода колебаний:
(см.: рис. а). Максимальное (амплитудное) значение ускорения зависит от амплитуды, частоты и периода колебаний:

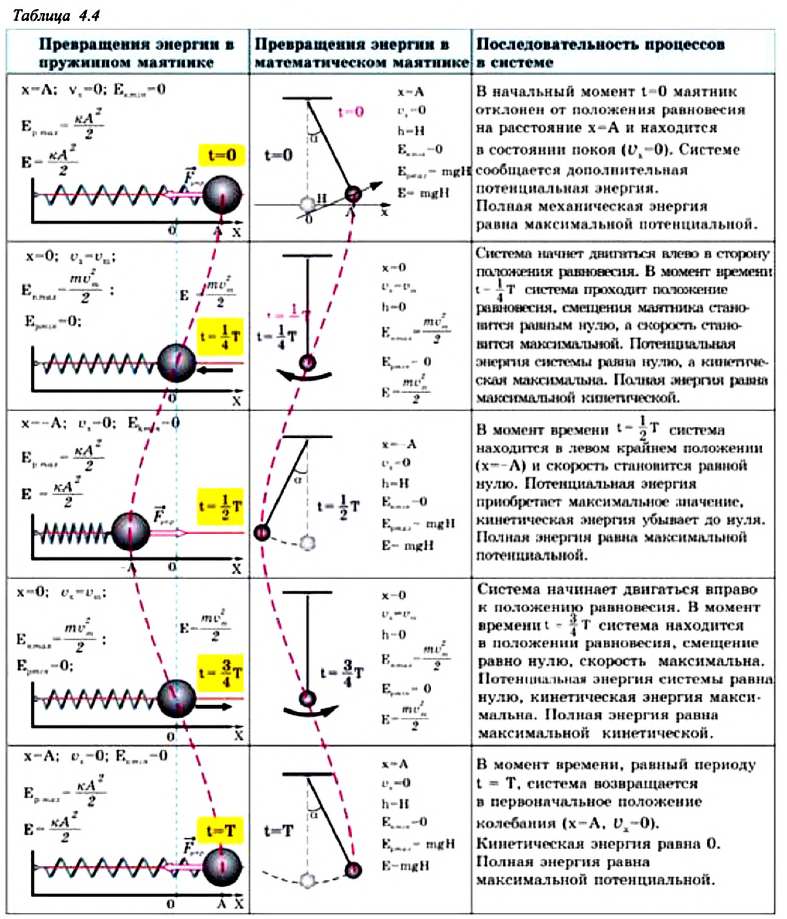
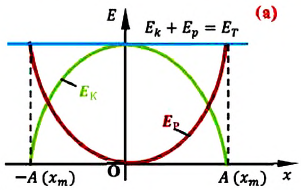
Превращения энергии при гармонических колебаниях
Теоретический материал
Потенциальная и кинетическая энергия свободных гармонических колебаний в замкнутой системе периодически превращаются друг в друга.
В таблице 4.4 дано сравнение превращений энергий в пружинном и математическом маятниках. Как видно из таблицы, потенциальная энергия колебательной системы в точке возвращения  имеет максимальное значение:
имеет максимальное значение:
Если же маятник находится в точке равновесия, потенциальная энергия минимальна:

Кинетическая энергия системы, наоборот, в точке возвращения минимальна  а в точке равновесия максимальна:
а в точке равновесия максимальна:
На рисунке (а) даны графики зависимости потенциальной и кинетической энергии при гармоническом колебательном движении от смещения.
Полная механическая энергия замкнутой колебательной системы в произвольный момент времени  остается постоянной (трение не учитывается):
остается постоянной (трение не учитывается):
a) для пружинного маятника:
b) для математического маятника:
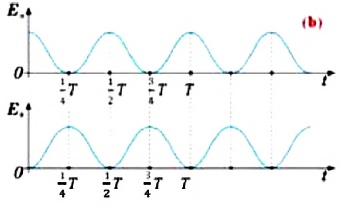
Если принять во внимание изменение смещения и скорости по гармоническому закону в формулах потенциальной и кинетической энергии колебательного движения, то станет очевидно, что при гармонических колебаниях эти энергии так же изменяются по гармоническому закону (b):

Как было отмечено выше, полная энергия системы не изменяется по гармоническому закону:

• Полная энергия гармонических колебаний прямо пропорциональна квадрату амплитуды колебаний.
Если же в системе существует сила трения, то его полная энергия не сохраняется — изменение полной механической энергии равно работе силы трения. В результате колебания затухают: 
Превращения энергии при гармонических колебаниях
Механическая энергия системы равна сумме ее кинетической и потенциальной энергий. Кинетической энергией тело обладает вследствие своего движения, а потенциальная энергия определяется взаимодействием тела с другими телами или полями. Механическая энергия замкнутой системы, в которой не действуют силы трения (сопротивления), сохраняется.
Поскольку при колебаниях гармонического осциллятора силу трения не учитывают, то его механическая энергия сохраняется.
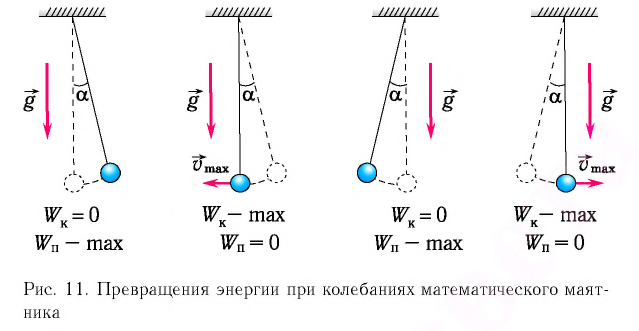
Рассмотрим превращения энергии при колебаниях математического маятника. Выберем систему отсчета таким образом, чтобы в положении равновесия его потенциальная энергия была равна нулю.
При отклонении маятника на угол а (рис. 7), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:

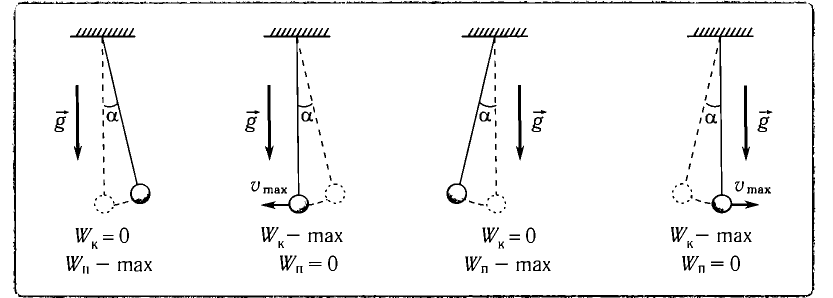
Рис. 7. Превращения энергии при колебаниях математического маятника
Поскольку при прохождении положения равновесия его потенциальная энергия равна нулю, то кинетическая энергия (а следовательно, и скорость) будет максимальна:
Из закона сохранения механической энергии следует (рис. 8), что
 (1)
(1)
Отсюда найдем модуль максимальной скорости маятника:
 (2)
(2)
Высоту  можно выразить через длину маятника l и амплитуду колебаний А.
можно выразить через длину маятника l и амплитуду колебаний А.
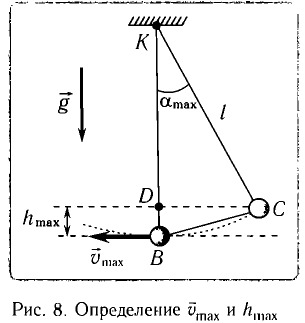
Если колебания малые, то  Из треугольника KCD на рисунке 8 находим
Из треугольника KCD на рисунке 8 находим

Отсюда

Подставив выражение для в формулу I (2), получим
Подставляя выражения для  и в соотношение (1), находим
и в соотношение (1), находим

Таким образом, в положении равновесия потенциальная энергия полностью переходит в кинетическую, а в положениях максимального отклонения кинетическая энергия полностью переходит в потенциальную.
В любом промежуточном положении

Покажем, что аналогичные превращения энергии имеют место и для пружинного маятника (рис. 9). В крайних точках, когда координата груза принимает значение  , модуль его скорости равен нулю (v = 0) и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
, модуль его скорости равен нулю (v = 0) и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
Таким образом, получаем, что механическая энергия гармонического осциллятора пропорциональна квадрату амплитуды колебаний.
В положении равновесия, когда x = 0, вся энергия осциллятора переходит в кинетическую энергию груза:
где  — модуль максимальной скорости груза при колебаниях.
— модуль максимальной скорости груза при колебаниях.
В промежуточных точках полная механическая энергия

Отсюда можно вывести выражение для модуля скорости  груза в точке с
груза в точке с
координатой х:
Так как 
Энергия при гармонических колебаниях
Механическая энергия системы равна сумме ее кинетической и потенциальной энергии. Механическая энергия замкнутой системы, в которой не действуют силы трения (сопротивления), сохраняется.
Поскольку при колебаниях гармонического осциллятора силой трения пренебрегают, то его механическая энергия сохраняется. Рассмотрим превращения энергии при колебаниях математического маятника. Выберем систему отсчета таким образом, чтобы в положении равновесия его потенциальная энергия была равна нулю.
При отклонении маятника на угол  (рис. 10), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:
(рис. 10), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:

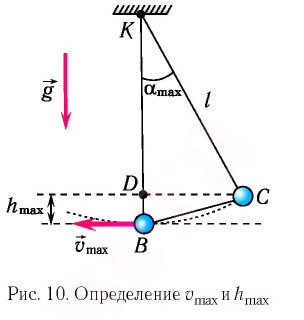
Поскольку при прохождении положения равновесия потенциальная энергия равна нулю  то из закона сохранения механической энергии следует (см. рис. 10), что
то из закона сохранения механической энергии следует (см. рис. 10), что  т. е. кинетическая энергия маятника (а следовательно, и скорость) рис. ю. Определение^иhmax будет максимальна:
т. е. кинетическая энергия маятника (а следовательно, и скорость) рис. ю. Определение^иhmax будет максимальна:
Запишем закон сохранения механической энергии, подставив в него выражения для потенциальной и кинетической энергии:

Отсюда найдем модуль максимальной скорости маятника:
Высоту  можно выразить через длину
можно выразить через длину  маятника и амплитуду
маятника и амплитуду  колебаний. Если колебания малые, то
колебаний. Если колебания малые, то  Из
Из  (см. рис. 10) находим:
(см. рис. 10) находим:

или 
Подставив выражение (3) для  в формулу (2), получим:
в формулу (2), получим:
Подставляя выражения (3) для  и (4) для
и (4) для  в соотношение (1), находим:
в соотношение (1), находим:

Таким образом, в положении равновесия потенциальная энергия полностью переходит в кинетическую, а в положениях максимального отклонения кинетическая энергия полностью переходит в потенциальную (рис. 11). В любом промежуточном положении

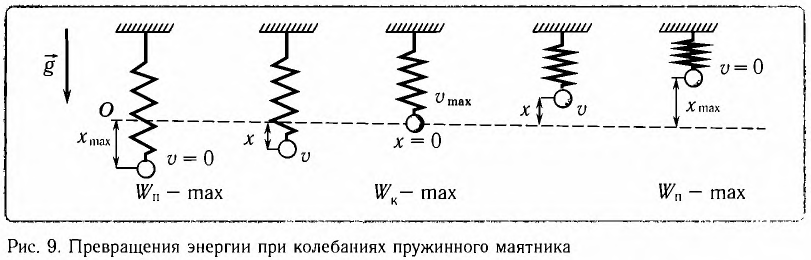
Покажем, что аналогичные превращения энергии имеют место и для пружинного маятника (рис. 12).
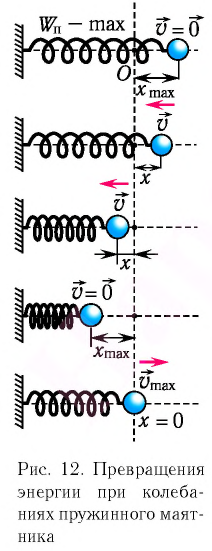
В крайних положениях, когда  модуль скорости маятника
модуль скорости маятника  и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
Таким образом, из соотношения (6) следует, что механическая энергия пружинного маятника пропорциональна квадрату амплитуды колебаний.
В положении равновесия, когда  вся энергия пружинного маятника переходит в кинетическую энергию груза:
вся энергия пружинного маятника переходит в кинетическую энергию груза:
где  — модуль максимальной скорости груза при колебаниях.
— модуль максимальной скорости груза при колебаниях.
В положениях между крайними точками полная энергия

С учетом выражений для координаты  и проекции скорости груза
и проекции скорости груза  а также для
а также для  находим его потенциальную энергию
находим его потенциальную энергию  и кинетическую энергию
и кинетическую энергию  в произвольный момент времени
в произвольный момент времени
Тогда полная механическая энергия пружинного маятника в этот же. момент времени есть величина постоянная и равная:
Таким образом, начальное смещение  определяет начальную потенциальную, а начальная скорость
определяет начальную потенциальную, а начальная скорость  определяет начальную кинетическую энергию колеблющегося тела. При отсутствии в системе потерь энергии процесс колебаний сопровождается только переходом энергии из потенциальной в кинетическую и обратно.
определяет начальную кинетическую энергию колеблющегося тела. При отсутствии в системе потерь энергии процесс колебаний сопровождается только переходом энергии из потенциальной в кинетическую и обратно.
Заметим, что частота периодических изменений кинетической (потенциальной) энергии колеблющегося тела в два раза больше частоты колебаний маятника. Действительно, дважды за период механическая энергия тела будет полностью превращаться в потенциальную (в двух крайних положениях маятника) и дважды за период — в кинетическую (при его прохождении через положение равновесия) (рис. 13).
Пример №1
Математический маятник при колебаниях от одного крайнего положения до другого смещается на расстояние  см и при прохождении положения равновесия достигает скорости, модуль которой
см и при прохождении положения равновесия достигает скорости, модуль которой  Определите период
Определите период  колебании маятника.
колебании маятника.
Дано:

Решение
По закону сохранения механической энергии

Отсюда:

Ответ: 
Пример №2
Груз массой  г находится на гладкой горизонтальной поверхности и закреплен на легкой пружине жесткостью
г находится на гладкой горизонтальной поверхности и закреплен на легкой пружине жесткостью  Его смешают на расстояние
Его смешают на расстояние  см от положения равновесия и сообщают в направлении от положения равновесия скорость, модуль которой
см от положения равновесия и сообщают в направлении от положения равновесия скорость, модуль которой  Определите потенциальную
Определите потенциальную  и кинетическую
и кинетическую  энергию груза в начальный момент времени. Запишите кинематический закон движения груза.
энергию груза в начальный момент времени. Запишите кинематический закон движения груза.
Дано:

Решение Потенциальная энергия груза:
Кинетическая энергия груза:

Начальное смещение груза не является амплитудой, так как вместе с начальным отклонением грузу сообщили и скорость. Однако полная энергия может быть выражена через амплитуду колебаний:

Отсюда

Циклическая частота:
В начальный момент времени  координата груза
координата груза  Отсюда начальная фаза:
Отсюда начальная фаза:

Тогда закон гармонических колебаний имеет вид (рис. 14):

Ответ: 

- Вынужденные колебания в физике
- Электромагнитные колебания
- Свободные и вынужденные колебания в физике
- Вынужденные электромагнитные колебания
- Закон Архимеда
- Движение жидкостей
- Уравнение Бернулли
- Механические колебания и волны в физике