Вектор. Скалярное произведение векторов. Угол между векторами.
Скалярным произведением (или внутренним произведением) 2 векторов есть операция с двумя
векторами, итогом чего является число (скаляр), которое не зависит от системы координат и которое
характеризует длины векторов-сомножителей и угол между векторами.
Также скалярным произведением двух векторов называется число, которое
равно произведению модулей 2 векторов на косинус угла между векторами.
Скалярное произведение векторов формула:
Этой операции соответствует умножение длины вектора x на проекцию вектора y на вектор x. Эта
операция зачастую рассматривается как коммутативная и линейная по каждому из сомножителей.
Скалярное произведение векторов ,, обозначается так: (порядок записи сомножителей не имеет
значения, т.е. ).
Еще используются такие обозначения: , , .
В основном имеется ввиду, что скалярное произведение определено положительно, т.е.
при каждом . Если этого не иметь ввиду, то произведение зовется индефинитным
(неопределенным).
Если хотя бы один из 2 векторов или равен нулевому вектору (равен нулю), то .
Свойства скалярного произведения векторов.
1. — симметричность.
2. обозначается и зовется скалярный квадрат.
3. Если , то
4. Если и и и , то . Обратное утверждение тоже соответствует
5. 
6.
7.
Если же векторы и заданы своими координатами: , , то: скалярное
произведение векторов, формула:
Формула для определения длины вектора:
Длина (модуль) вектора, с известными координатами, равен квадратному корню из суммы квадратов
Длина вектора , заданного своими координатами, равна:
Как определить угол между 2 векторами:
Как найти угол между двумя векторами , , формула:
Ежели угол меж двумя векторами острый, то их скалярное произведение имеет положительный знак; если
же угол между двумя векторами тупой, то их скалярное произведение имеет отрицательный знак.
Скалярное произведение двух ненулевых векторов равно нулю, тогда и только тогда, когда эти векторы
ортогональны.
Альтернативное определение скалярного произведения векторов (вычисление скалярного
произведения двух векторов, заданных своими координатами).
Вычислить координаты вектора, если заданы координаты его начала и его конца очень просто. Давайте
рассмотрим этот вопрос:
Пусть есть вектор AB, точка А – это начало вектора, а В — конец, и координаты этих точек приведены ниже:
Исходя из этого, координаты вектора АВ:
Точно так же и в двухмерном пространстве – разница в отсутствии третьих координат.
Итак, предположим, даны два вектора, которые заданы набором координат своих точек:
а) В двухмерном пространстве (плоскость):
Значит, скалярное произведение этих векторов вычислим по формуле:
б) В трехмерном пространстве:
Как и в двухмерном случае, скалярное произведение двух векторов вычисляем по формуле:
Скалярное произведение векторов

О чем эта статья:
11 класс, ЕГЭ/ОГЭ
Статья находится на проверке у методистов Skysmart.
Если вы заметили ошибку, сообщите об этом в онлайн-чат
(в правом нижнем углу экрана).
Основные определения
Система координат — способ определить положение и перемещение точки или тела с помощью чисел или других символов.
Координаты — это совокупность чисел, которые определяют положение какого-либо объекта на прямой, плоскости, поверхности или в пространстве. Как найти координаты точки мы рассказали в этой статье.
Скаляр — это величина, которая полностью определяется в любой координатной системе одним числом или функцией.
Вектор — направленный отрезок прямой, для которого указано, какая точка является началом, а какая — концом.
Вектор с началом в точке A и концом в точке B принято обозначать как →AB. Векторы также можно обозначать малыми латинскими буквами со стрелкой или черточкой над ними, вот так: →a.
Скалярное произведение — это операция над двумя векторами, результатом которой является скаляр, то есть число, которое не зависит от выбора системы координат.
Результат операции является число. То есть при умножении вектор на вектор получается число. Если длины векторов |→a|, |→b| — это числа, косинус угла — число, то их произведение |→a|*|→b|*cos∠(→a, →b) тоже будет числом.
Чтобы разобраться в теме этой статьи, нам еще нужно узнать особенности угла между векторами.
Угол между векторами
Угол между векторами ∠(→a, →b) может принимать значения от 0° до 180° градусов включительно. Аналитически это можно записать в виде двойного неравенства: 0°=
2. Если угол между векторами равен 90°, то такие векторы перпендикулярны друг другу.
3. Если векторы направлены в разные стороны, тогда угол между ними 180°.
Также векторы могут образовывать тупой угол. Это выглядит так:
Скалярное произведение векторов
Определение скалярного произведения можно сформулировать двумя способами:
Скалярное произведение двух векторов a и b дает в результате скалярную величину, которая равна сумме попарного произведения координат векторов a и b.
Скалярным произведением двух векторов a и b будет скалярная величина, равная произведению модулей этих векторов, умноженная на косинус угла между ними:
→a * →b = →|a| * →|b| * cosα
Что важно запомнить про геометрическую интерпретацию скалярного произведения:
- Если угол между векторами острый и векторы ненулевые, то скалярное произведение положительно, то есть cosα > 0.
- Если угол между векторами тупой и векторы ненулевые, то скалярное произведение отрицательно, так как cosα
Скалярное произведение в координатах
Вычисление скалярного произведения можно произвести через координаты векторов в заданной плоскости или в пространстве.
Скалярным произведением двух векторов на плоскости или в трехмерном пространстве в прямоугольной системе координат называется сумма произведений соответствующих координат векторов →a и →b.
То есть для векторов →a = (ax, ay), →b = (bx, by) на плоскости в прямоугольной декартовой системе координат формула для вычисления скалярного произведения имеет вид: (→a, →b) = ax*bx + ay*by
А для векторов →a = (ax, ay, az), →b = (bx, by, bz) в трехмерном пространстве скалярное произведение в координатах находится так: (→a, →b) = ax*bx + ay*by + az*bz
Докажем это определение:
Сначала докажем равенства
для векторов →a = (ax, ay), →b = (bx, by) на плоскости, заданных в прямоугольной декартовой системе координат.
Отложим от начала координат (точка О) векторы →OB = →b = (bx, by) и →OA = →a = (ax, ay)
Тогда, →AB = →OB — →OA = →b — →a = (bx — ax, by — ay)
Будем считать точки О, А и В вершинами треугольника ОАВ. По теореме косинусов можно записать:
то последнее равенство можно переписать так:
а по первому определению скалярного произведения имеем
Записывайтесь на наши курсы по математике для учеников с 1 по 11 классы!
Формулы скалярного произведения векторов заданных координатами
Формула скалярного произведения векторов для плоских задач
В плоской задаче скалярное произведение векторов a = и b = можно найти по формуле:
a * b = ax * bx + ay * by
Формула скалярного произведения векторов для пространственных задач
В пространственной задаче скалярное произведение векторов a = и b = можно найти по формуле:
a * b = ax * bx + ay * by + az * bz
Формула скалярного произведения n-мерных векторов
В n-мерном пространстве скалярное произведение векторов a = и b = можно найти по формуле:
a * b = a1 * b1 + a2 * b2 + . + an * bn
Свойства скалярного произведения
Свойства скалярного произведения векторов:
Скалярное произведение вектора самого на себя всегда больше или равно нулю. В результате получается нуль, если вектор равен нулевому вектору.
→0 * →0 = 0
Скалярное произведение вектора самого на себя равно квадрату его модуля:
→a * →a = →∣∣a∣∣2
Операция скалярного произведения коммуникативна, то есть соответствует переместительному закону:
→a * →b = →b * →a
Операция скалярного умножения дистрибутивна, то есть соответствует распределительному закону:
(→a + →b) * →c = →a * →c + →b * →c
Сочетательный закон для скалярного произведения:
(k * →a) * →b = k * (→a * →b)
Если скалярное произведение двух ненулевых векторов равно нулю, то эти векторы ортогональны, то есть перпендикулярны друг другу:
a ≠ 0, b ≠ 0, a * b = 0 a ┴ b
Эти свойства очень легко обосновать, если отталкиваться от определения скалярного произведения в координатной форме и от свойств операций сложения и умножения действительных чисел.
Для примера докажем свойство коммутативности скалярного произведения (→a, →b) = (→b, →a)
По определению (→a, →b) = ax*bx + ay*by и (→b, →a) = bx*ax + by*ay. В силу свойства коммутативности операции умножения действительных чисел, справедливо ax*bx = bx*ax b ay*by = by*ay, тогда ax*bx + ay*by = bx*ax + by*ay.
Следовательно, (→a, →b) = (→b, →a), что и требовалось доказать.
Аналогично доказываются остальные свойства скалярного произведения.
Следует отметить, что свойство дистрибутивности скалярного произведения справедливо для любого числа слагаемых, то есть,
Примеры вычислений скалярного произведения
Пример 1.
Вычислите скалярное произведение двух векторов →a и →b, если их длины равны 3 и 7 единиц соответственно, а угол между ними равен 60 градусам.
У нас есть все данные, чтобы вычислить скалярное произведение по определению:
(→a,→b) = →|a| * →|b| * cos(→a,→b) = 3 * 7 cos60° = 3 * 7 * 1/2 = 21/2 = 10,5.
Ответ: (→a,→b) = 21/2 = 10,5.
Пример 2.
Найти скалярное произведение векторов →a и →b, если →|a| = 2, →|b| = 5, ∠(→a,→b) = π/6.
Используем формулу →a * →b = →|a| * →|b| * cosα.
В данном случае:
→a * →b = →|a| * →|b| * cosα = 2 * 5 * cosπ/6 = 10 * √3/2 = 5√3
Пример 3.
Как найти скалярное произведение векторов →a = 7*→m + 3*→n и →b = 5*→m + 8*→n, если векторы →m и →n перпендикулярны и их длины равны 3 и 2 единицы соответственно.
По свойству дистрибутивности скалярного произведения имеем
Сочетательное свойство позволяет нам вынести коэффициенты за знак скалярного произведения:
В силу свойства коммутативности последнее выражение примет вид
Итак, после применения свойств скалярного произведения имеем
Осталось применить формулу для вычисления скалярного произведения через длины векторов и косинус угла между ними:
Пример 4.
В правильной треугольной призме ABCA1B1C1, все ребра которой равны 1, найти косинус угла между прямыми AB1 и BC1.
Введем систему координат.
Если сделать выносной рисунок основания призмы, получим понятный плоскостной рисунок с помощью которого можно легко найти координаты всех интересующих точек.
Пример 5.
а) Проверить ортогональность векторов: →a(1; 2; -4) и →b(6; -1; 1) .
б) Выяснить, будут ли перпендикулярными отрезки KL и MN, если K(3;5), L(-2;0), M(8;-1), N(1;4).
а) Выясним, будут ли ортогональны пространственные векторы. Вычислим их скалярное произведение: →ab = 1*6 + 2*(-1) + (-4)*1 = 0, следовательно
б) Здесь речь идёт об обычных отрезках плоскости, а задача всё равно решается через векторы. Найдем их: →KL(-2-3; 0-5) = →KL(-5; -5), →MN(1-8; 4-(-1)) = →MN(-7;5)
Вычислим их скалярное произведение: →KL*→MN = -5*(-7) + (-5)*5 = 10 ≠ 0, значит, отрезки KL и MN не перпендикулярны.
Обратите внимание на два существенных момента:
- В данном случае нас не интересует конкретное значение скалярного произведения, важно, что оно не равно нулю.
- В окончательном выводе подразумевается, что если векторы не ортогональны, значит, соответствующие отрезки тоже не будут перпендикулярными. Геометрически это очевидно, поэтому можно сразу записывать вывод об отрезках, что они не перпендикулярны.
Ответ: а) →a перпендикулярно →b, б) отрезки KL, MN не перпендикулярны.
Пример 6.
Даны три вершины треугольника A(-1; 0), B(3; 2), C(5; -4). Найти угол при вершине B — ∠ABC.
По условию чертеж выполнять не требуется, но для удобства можно сделать:
Требуемый угол ∠ABC помечен зеленой дугой. Сразу вспоминаем школьное обозначение угла: ∠ABC — особое внимание на среднюю букву B — это и есть нужная нам вершина угла. Для краткости можно также записать просто ∠B.
Из чертежа видно, что угол ∠ABC треугольника совпадает с углом между векторами →BA и →BC, иными словами: ∠ABC = ∠(→BA; →BC).
Вычислим скалярное произведение:
Вычислим длины векторов:
Найдем косинус угла:
Когда такие примеры не будут вызывать трудностей, можно начать записывать вычисления в одну строчку:
Полученное значение не является окончательным, поэтому нет особого смысла избавляться от иррациональности в знаменателе.
Найдём сам угол:
Если посмотреть на чертеж, то результат действительно похож на правду. Для проверки угол также можно измерить и транспортиром.
Ответ: ∠ABC = arccos(1/5√2) ≈1,43 рад. ≈ 82°
Важно не перепутать, что в задаче спрашивалось про угол треугольника, а не про угол между векторами. Поэтому указываем точный ответ: arccos(1/5√2) и приближенное значение угла: ≈1,43 рад. ≈ 82°, которое легко найти с помощью калькулятора.
А те, кому мало и хочется еще порешать, могут вычислить углы ∠A, ∠C, и убедиться в справедливости канонического равенства ∠A + ∠B + ∠C = 180°.
Линейная алгебра для разработчиков игр
Эта статья является переводом цикла из четырёх статей «Linear algebra for game developers», написанных David Rosen и посвящённых линейной алгебре и её применению в разработке игр. С оригинальными статьями можно ознакомиться тут: часть 1, часть 2, часть 3 и часть 4. Я не стал публиковать переводы отдельными топиками, а объединил все статьи в одну. Думаю, что так будет удобнее воспринимать материал и работать с ним. Итак приступим.
Зачем нам линейная алгебра?
Одним из направлений в линейной алгебре является изучение векторов. Если в вашей игре применяется позиционирование экранных кнопок, работа с камерой и её направлением, скоростями объектов, то вам придётся иметь дело с векторами. Чем лучше вы понимаете линейную алгебру, тем больший контроль вы получаете над поведением векторов и, следовательно, над вашей игрой.
Что такое вектор?
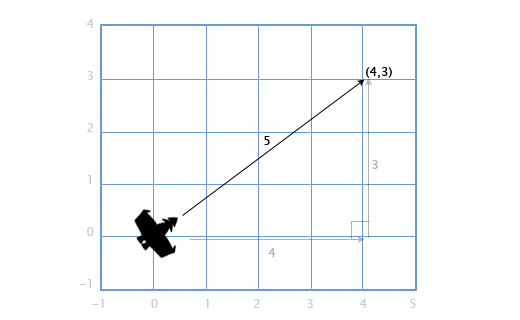
В играх вектора используются для хранения местоположений, направлений и скоростей. Ниже приведён пример двухмерного вектора: 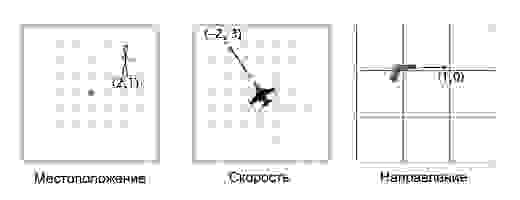
Вектор местоположения (также называемый «радиус-вектором») показывает, что человек стоит в двух метрах восточнее и в одном метре к северу от исходной точки. Вектор скорости показывает, что за единицу времени самолёт перемещается на три километра вверх и на два — влево. Вектор направления говорит нам о том, что пистолет направлен вправо.
Как вы можете заметить, вектор сам по себе всего лишь набор цифр, который обретает тот или иной смысл в зависимости от контекста. К примеру, вектор (1, 0) может быть как направлением для оружия, как показано на картинке, так и координатами строения в одну милю к востоку от вашей текущей позиции. Или скоростью улитки, которая двигается вправо со скоростью в 1 милю в час (прим. переводчика: довольно быстро для улитки, 44 сантиметра в секунду).
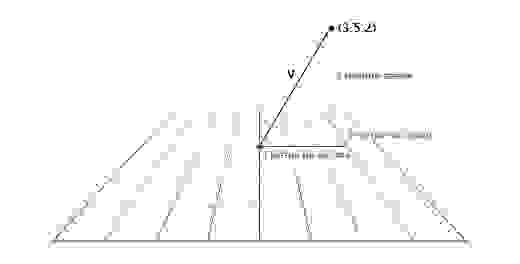
Важно отслеживать единицы измерения. Допустим у нас есть вектор V (3,5,2). Это мало что говорит нам. Три чего, пять чего? В нашей игре Overgrowth расстояния указываются в метрах, а скорости в метрах в секунду. Первое число в этом векторе — это направление на восток, второе — направление вверх, третье — направление на север. Отрицательные числа обозначают противоположные направления, на запад, вниз и на юг. Местоположение, определяемое вектором V (3,5,2), находится в трёх метрах к востоку, в пяти метрах вверху и в двух метрах к северу, как показано на картинке ниже.
Итак, мы изучили основы работы с векторами. Теперь узнаем как вектора использовать.
Сложение векторов
Чтобы сложить вектора, нам надо просто сложить каждую их составляющую друг с другом. Например:
(0, 1, 4) + (3, -2, 5) = (0+3, 1-2, 4+5) = (3, -1, 9)
Зачем нам нужно складывать вектора? Наиболее часто сложение векторов в играх применяется для физического интегрирования. Любой физический объект будет иметь вектора для местоположения, скорости и ускорения. Для каждого кадра (обычно это одна шестидесятая часть секунды), мы должны интегрировать два вектора: добавить скорость к местоположению и ускорение к скорости.
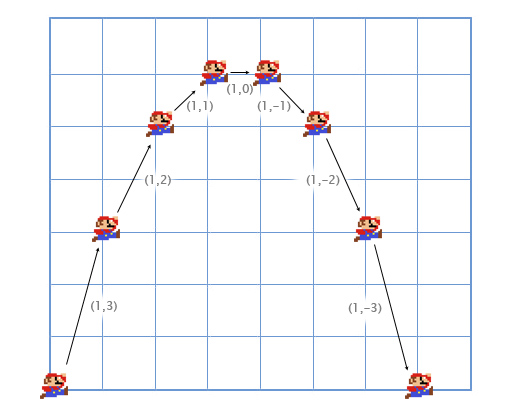
Давайте рассмотрим пример с прыжками Марио. Он начинает с позиции (0, 0). В момент начала прыжка его скорость (1, 3), он быстро двигается вверх и вправо. Его ускорение равно (0, -1), так как гравитация тянет его вниз. На картинке показано, как выглядит его прыжок, разбитый на семь кадров. Чёрным текстом показана его скорость в каждом фрейме.
Давайте рассмотрим первые кадры поподробнее, чтобы понять как всё происходит.
Для первого кадра, мы добавляем скорость Марио (1, 3) к его местоположению (0, 0) и получаем его новые координаты (1, 3). Затем мы складываем ускорение (0, -1) с его скоростью (1, 3) и получаем новое значение скорости Марио (1, 2).
Делаем то-же самое для второго кадра. Добавляем скорость (1, 2) к местоположению (1, 3) и получаем координаты (2, 5). Затем добавляем ускорение (0, -1) к его скорости (1, 2) и получаем новую скорость (1, 1).
Обычно игрок контролирует ускорение игрового персонажа с помощью клавиатуры или геймпада, а игра, в свою очередь, рассчитывает новые значения для скоростей и местоположения, используя физическое сложение (через сложение векторов). Это та-же задача, которая решается в интегральном исчислении, просто мы его сильно упрощаем для нашей игры. Я заметил, что мне намного проще внимательно слушать лекции по интегральному исчислению, думая о практическом его применении, которое мы только что описали.
Вычитание векторов
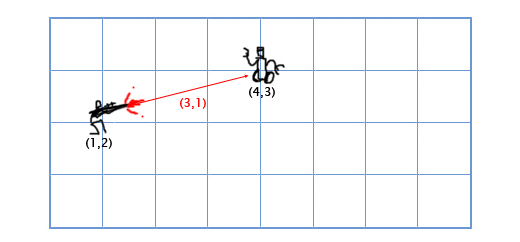
Вычитание рассчитывается по тому-же принципу что и сложение — вычитаем соответствующие компоненты векторов. Вычитание векторов удобно для получения вектора, который показывает из одного местоположения на другое. Например, пусть игрок находится по координатам (1, 2) с лазерным ружьём, а вражеский робот находится по координатам (4, 3). Чтобы определить вектор движения лазерного луча, который поразит робота, нам надо вычесть местоположение игрока из местоположения робота. Получаем:
(4, 3) — (1, 2) = (4-1, 3-2) = (3, 1).
Умножение вектора на скаляр
Когда мы говорим о векторах, мы называем отдельные числа скалярами. Например (3, 4) — вектор, а 5 — это скаляр. В играх, часто бывает нужно умножить вектор на число (скаляр). Например, моделируя простое сопротивление воздуха путём умножения скорости игрока на 0.9 в каждом кадре. Чтобы сделать это, нам надо умножить каждый компонент вектора на скаляр. Если скорость игрока (10, 20), то новая скорость будет:
0.9*(10, 20) = (0.9 * 10, 0.9 * 20) = (9, 18).
Длина вектора
Если у нас есть корабль с вектором скорости V (4, 3), нам также понадобится узнать как быстро он двигается, чтобы посчитать потребность в экранном пространстве или сколько потребуется топлива. Чтобы сделать это, нам понадобится найти длину (модуль) вектора V. Длина вектора обозначается вертикальными линиями, в нашем случае длина вектора V будет обозначаться как |V|.
Мы можем представить V как прямоугольный треугольник со сторонами 4 и 3 и, применяя теорему Пифагора, получить гипотенузу из выражения: x 2 + y 2 = h 2
В нашем случае — длину вектора H с компонентами (x, y) мы получаем из квадратного корня: sqrt(x 2 + y 2 ).
Итак, скорость нашего корабля равна:
|V| = sqrt(4 2 + 3 2 ) = sqrt(25) = 5
Этот подход используется и для трёхмерных векторов. Длина вектора с компонентами (x, y, z) рассчитывается как sqrt(x 2 + y 2 + z 2 )
Расстояние
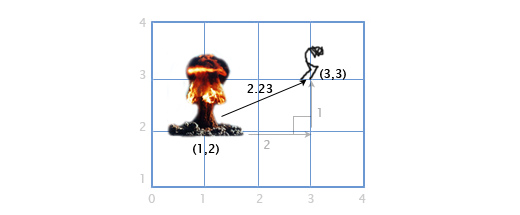
Если игрок P находится в точке (3, 3), а взрыв произошёл в точке E по координатам (1, 2), нам надо определить расстояние между игроком и взрывом, чтобы рассчитать степень ущерба, нанесённого игроку. Это легко сделать, комбинируя две вышеописанных операции: вычитание векторов и их длину.
Мы вычитаем P — E, чтобы получить вектор между ними. А затем определяем длину этого вектора, что и даёт нам искомое расстояние. Порядок следования операндов тут не имеет значения, |E — P| даст тот-же самый результат.
Расстояние = |P — E| = |(3, 3) — (1, 2)| = |(2, 1)| = sqrt(2 2 +1 2 ) = sqrt(5) = 2.23
Нормализация
Когда мы имеем дело с направлениями (в отличие от местоположений и скоростей), важно, чтобы вектор направления имел длину, равную единице. Это сильно упрощает нам жизнь. Например, допустим орудие развёрнуто в направлении (1, 0) и выстреливает снаряд со скоростью 20 метров в секунду. Каков в данном случае вектор скорости для выпущенного снаряда?
Так как вектор направления имеет длину равную единице, мы умножаем направление на скорость снаряда и получаем вектор скорости (20, 0). Если-же вектор направления имеет отличную от единицы длину, мы не сможем сделать этого. Снаряд будет либо слишком быстрым, либо слишком медленным.
Вектор с длиной равной единице называется «нормализованным». Как сделать вектор нормализованным? Довольно просто. Мы делим каждый компонент вектора на его длину. Если, к примеру, мы хотим нормализовать вектор V с компонентами (3, 4), мы просто делим каждый компонент на его длину, то есть на 5, и получаем (3/5, 4/5). Теперь, с помощью теоремы Пифагора, мы убедимся в том, что его длина равна единице:
(3/5) 2 + (4/5) 2 = 9/25 + 16/25 = 25/25 = 1
Скалярное произведение векторов
Что такое скалярное произведение (записывается как •)? Чтобы рассчитать скалярное произведение двух векторов, мы должны умножить их компоненты, а затем сложить полученные результаты вместе
(a1, a2) • (b1, b2) = a1b1 + a2b2
Например: (3, 2) • (1, 4) = 3*1 + 2*4 = 11. На первый взгляд это кажется бесполезным, но посмотрим внимательнее на это:
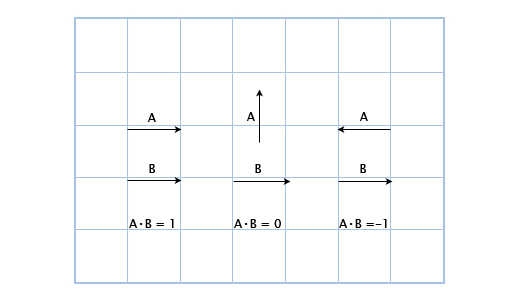
Здесь мы можем увидеть, что если вектора указывают в одном направлении, то их скалярное произведение больше нуля. Когда они перпендикулярны друг другу, то скалярное произведение равно нулю. И когда они указывают в противоположных направлениях, их скалярное произведение меньше нуля.
В основном, с помощью скалярного произведения векторов можно рассчитать, сколько их указывает в одном направлении. И хоть это лишь малая часть возможностей скалярного произведения, но уже очень для нас полезная.
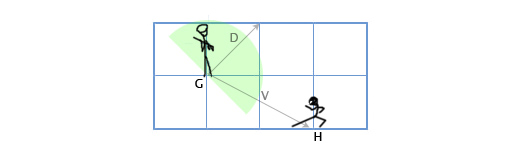
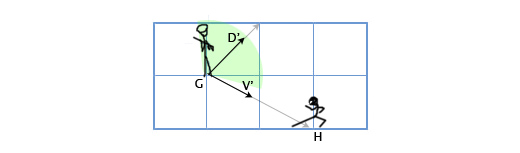
Допустим у нас есть стражник, расположенный в G(1, 3) смотрящий в направлении D(1,1), с углом обзора 180 градусов. Главный герой игры подсматривает за ним с позиции H(3, 2). Как определить, находится-ли главный герой в поле зрения стражника или нет? Сделаем это путём скалярного произведения векторов D и V (вектора, направленного от стражника к главному герою). Мы получим следующее:
V = H — G = (3, 2) — (1, 3) = (3-1, 2-3) = (2, -1)
D•V = (1, 1) • (2, -1) = 1*2 + 1*-1 = 2-1 = 1
Так как единица больше нуля, то главный герой находится в поле зрения стражника.
Мы уже знаем, что скалярное произведение имеет отношение к определению направления векторов. А каково его более точное определение? Математическое выражение скалярного произведения векторов выглядит так:
Где Θ (произносится как «theta») — угол между векторами A и B.
Это позволяет нам найти Θ (угол) с помощью выражения:
Как я говорил ранее, нормализация векторов упрощает нашу жизнь. И если A и B нормализованы, то выражение упрощается следующим образом:
Давайте опять рассмотрим сценарий со стражником. Пусть теперь угол обзора стражника будет равен 120 градусам. Получим нормализованные вектора для направления взгляда стражника (D’) и для направления от стражника к главному герою (V’). Затем определим угол между ними. Если угол более 60 градусов (половина от угла обзора), то главный герой находится вне поля зрения стражника.
D’ = D / |D| = (1, 1) / sqrt(1 2 + 1 2 ) = (1, 1) / sqrt(2) = (0.71, 0.71)
V’ = V / |V| = (2, -1) / sqrt(2 2 + (-1) 2 ) = (2,-1) / sqrt(5) = (0.89, -0.45)
Θ = acos(D’V’) = acos(0.71*0.89 + 0.71*(-0.45)) = acos(0.31) = 72
Угол между центром поля зрения стражника и местоположением главного героя составляет 72 градуса, следовательно стражник его не видит.
Понимаю, что это выглядит довольно сложно, но это потому, что мы всё делаем вручную. В программе это всё довольно просто. Ниже показано как я сделал это в нашей игре Overgrowth с помощью написанных мной С++ библиотек для работы с векторами:
Векторное произведение
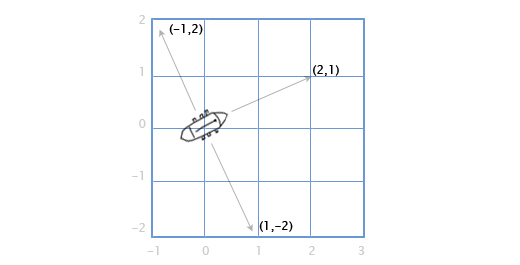
Допустим у нас есть корабль с пушками, которые стреляют в правую и в левую стороны по курсу. Допустим, что лодка расположена вдоль вектора направления (2, 1). В каких направлениях теперь стреляют пушки?
Это довольно просто в двухмерной графике. Чтобы повернуть направление на 90 градусов по часовой стрелке, достаточно поменять местами компоненты вектора, а затем поменять знак второму компоненту.
(a, b) превращается в (b, -a). Следовательно у корабля, расположенного вдоль вектора (2, 1), пушки справа по борту будут стрелять в направлении (1, -2), а пушки с левого борта, будут стрелять в противоположном направлении. Меняем знаки у компонент вектора и получаем (-1, 2).
А что если мы хотим рассчитать это всё для трехмерной графики? Рассмотрим пример с кораблём.
У нас есть вектор мачты M, направленной прямо вверх (0, 1, 0) и направление ветра: север-северо-восток W (1, 0, 2). И мы хотим вычислить вектор направления паруса S, чтобы наилучшим образом «поймать ветер».
Для решения этой задачи мы используем векторное произведение: S = M x W.
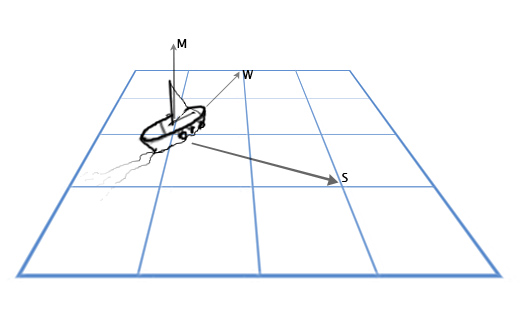
Подставим теперь нужные нам значения:
S = MxW = (0, 1, 0) x (1, 0, 2) = ([1*2 — 0*0], [0*1 — 0*2], [0*0 — 1*1]) = (2, 0, -1)
Для расчётов вручную довольно сложно, но для графических и игровых приложений я рекомендую написать функцию, подобную той, что указана ниже и не вдаваться более в детали подобных расчётов.
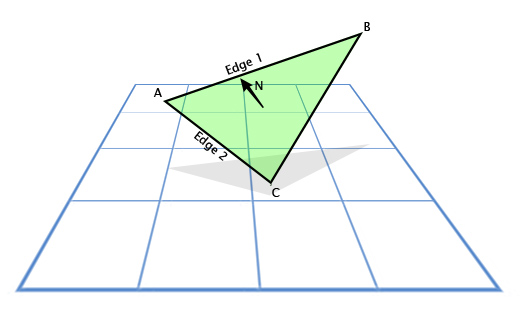
Векторное произведение часто используется в играх, чтобы рассчитать нормали к поверхностям. Направления, в которых «смотрит» та или иная поверхность. Например, рассмотрим треугольник с векторами вершин A, B и С. Как мы найдем направление в котором «смотрит» треугольник, то есть направление перпендикулярное его плоскости? Это кажется сложным, но у нас есть инструмент для решения этой задачи.
Используем вычитание, для определения направления из A в С (C — A), пусть это будет «грань 1» (Edge 1) и направление из A в B (B — A), пусть это будет «грань 2» (Edge 2). А затем применим векторное произведение, чтобы найти вектор, перпендикулярный им обоим, то есть перпендикулярный плоскости треугольника, также называемый «нормалью к плоскости».
Вот так это выглядит в коде:
В играх основное выражение освещённости записывается как N • L, где N — это нормаль к освещаемой поверхности, а L — это нормализованный вектор направления света. В результате поверхность выглядит яркой, когда на неё прямо падает свет, и тёмной, когда этого не происходит.
Теперь перейдем к рассмотрению такого важного для разработчиков игр понятия, как «матрица преобразований» (transformation matrix).
Для начала изучим «строительные блоки» матрицы преобразований.
Базисный вектор
Допустим мы пишем игру Asteroids на очень старом «железе» и нам нужен простой двухмерный космический корабль, который может свободно вращаться в своей плоскости. Модель корабля выглядит так:
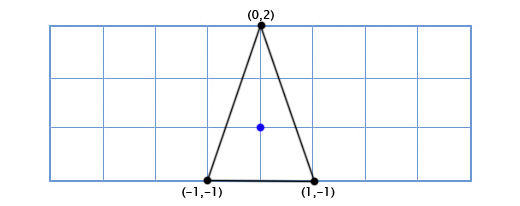
Как нам рисовать корабль, когда игрок поворачивает его на произвольный градус, скажем 49 градусов против часовой стрелки. Используя тригонометрию, мы можем написать функцию двухмерного поворота, которая принимает координаты точки и угол поворота, и возвращает координаты смещённой точки:
Применяя эту функцию ко всем трём точкам, мы получим следующую картину:
Операции с синусами и косинусами работают довольно медленно, но так как мы делаем расчёты лишь для трёх точек, это будет нормально работать даже на старом «железе» (прим. переводчика: в случаях, когда предполагается интенсивное использование тригонометрических функций, для ускорения вычислений, в памяти организуют таблицы значений для каждой функции и рассчитывают их во время запуска приложения. Затем при вычислении той или иной тригонометрической функции просто производится обращение к таблице).
Пусть теперь наш корабль выглядит вот так:
Теперь старый подход будет слишком медленным, так как надо будет поворачивать довольно большое количество точек. Одно из элегантных решений данной проблемы будет звучать так — «Что если вместо поворота каждой точки модели корабля, мы повернём координатную решётку нашей модели?»
Как это работает? Давайте посмотрим внимательнее, что собой представляют координаты.
Когда мы говорим о точке с координатами (3, 2), мы говорим, что её местоположение находится в трех шагах от точки отсчёта по координатной оси X, и двух шагах от точки отсчёта по координатной оси Y.
По-умолчанию координатные оси расположены так: вектор координатной оси X (1, 0), вектор координатной оси Y (0, 1). И мы получим расположение: 3(1, 0) + 2(0, 1). Но координатные оси не обязательно должны быть в таком положении. Если мы повернём координатные оси, в это-же время мы повернём все точки в координатной решётке.
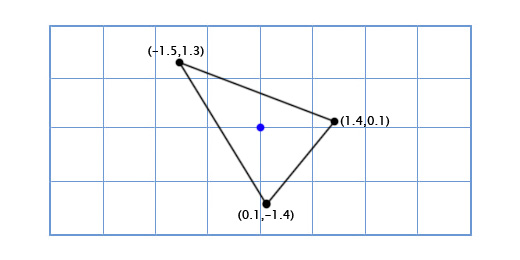
Чтобы получить повернутые оси X и Y мы применим тригонометрические функции, о которых говорили выше. Если мы поворачиваем на 49 градусов, то новая координатная ось X будет получена путём поворота вектора (0, 1) на 49 градусов, а новая координатная ось Y будет получена путём поворота вектора (0, 1) на 49 градусов. Итак вектор новой оси X у нас будет равен (0.66, 0.75), а вектор новой оси Y будет (-0.75, 0.66). Сделаем это вручную для нашей простой модели из трёх точек, чтобы убедиться, что это работает так, как нужно:
Координаты верхней точки (0, 2), что означает, что её новое местоположение находится в 0 на новой (повёрнутой) оси X и 2 на новой оси Y:
0*(0.66,0.75) + 2*(-0.75, 0.66) = (-1.5, 1.3)
Нижняя левая точка (-1, -1), что означает, что её новое местоположение находится в -1 на повернутой оси X, и -1 на повернутой оси Y:
-1*(0.66,0.75) + -1*(-0.75, 0.66) = (0.1, -1.4)
Нижняя правая точка (1, -1), что означает её новое местоположение находится в 1 на повернутой оси X, и -1 на повернутой оси Y
1*(0.66,0.75) + -1*(-0.75, 0.66) = (1.4, 0.1)
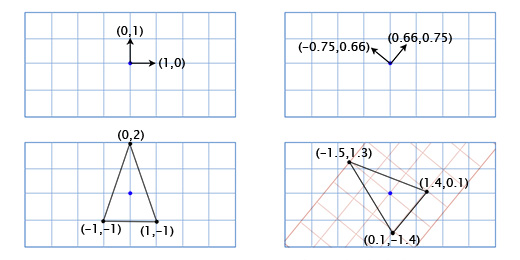
Мы показали, как координаты корабля отображаются в другой координатной сетке с повернутыми осями (или «базисными векторами»). Это удобно в нашем случае, так как избавляет нас от необходимости применять тригонометрические преобразования к каждой из точек модели корабля.
Каждый раз, когда мы изменяем базисные вектора (1, 0) и (0, 1) на (a, b) и (c, d), то новая координата точки (x, y) может быть найдена с помощью выражения:
Обычно базисные вектора равны (1, 0) и (0, 1) и мы просто получаем x(1, 0) + y(0, 1) = (x, y), и нет необходимости заботиться об этом дальше. Однако, важно помнить, что мы можем использовать и другие базисные вектора, когда нам это нужно.
Матрицы
Матрицы похожи на двухмерные вектора. Например, типичная 2×2 матрица, может выглядеть так:
Когда вы умножаете матрицу на вектор, вы суммируете скалярное произведение каждой строки с вектором, на который происходит умножение. Например, если мы умножаем вышеприведённую матрицу на вектор (x, y), то мы получаем:
Будучи записанным по-другому, это выражение выглядит так:
Выглядит знакомо, не так-ли? Это в точности такое-же выражение, которые мы использовали для смены базисных векторов. Это означает, что умножая 2×2 матрицу на двухмерный вектор, мы тем самым меняем базисные вектора. Например, если мы вставим стандартные базисные вектора в (1, 0) и (0, 1) в колонки матрицы, то мы получим:
Это единичная матрица, которая не даёт эффекта, который мы можем ожидать от нейтральных базисных векторов, которые мы указали. Если-же мы повернём базисные вектора на 49-градусов, то мы получим:
Эта матрица будет поворачивать двухмерный вектор на 49 градусов против часовой стрелки. Мы можем сделать код нашей игры Asteriods более элегантным, используя матрицы вроде этой. Например, функция поворота нашего корабля может выглядеть так:
Однако, наш код будет ещё более элегантным, если мы сможем также включить в эту матрицу перемещение корабля в пространстве. Тогда у нас будет единая структура данных, которая будет заключать в себе и применять информацию об ориентации объекта и его местоположении в пространстве.
К счастью есть способ добиться этого, хоть это и выглядит не очень элегантно. Если мы хотим переместиться с помощью вектора (e, f), мы лишь включаем его в нашу матрицу преобразования:
И добавляем дополнительную единицу в конец каждого вектора, определяющего местоположение объекта, например так:
Теперь, когда мы перемножаем их, мы получаем:
(a, c, e) • (x, y, 1) + (b, d, f) • (x, y, 1) + (0, 0, 1) • (x, y, 1)
Что, в свою очередь, может быть записано как:
x(a, b) + y(c, d) + (e, f)
Теперь у нас есть полный механизм трансформации, заключённый в одной матрице. Это важно, если не принимать в расчёт элегантность кода, так как с ней мы теперь можем использовать все стандартные манипуляции с матрицами. Например перемножить матрицы, чтобы добавить нужный эффект, или мы можем инвертировать матрицу, чтобы получить прямо противоположное положение объекта.
Трехмерные матрицы
Матрицы в трехмерном пространстве работают так-же как и в двухмерном. Я приводил примеры с двухмерными векторами и матрицами, так как их просто отобразить с помощью дисплея, показывающего двухмерную картинку. Нам просто надо определить три колонки для базисных векторов, вместо двух. Если базисные вектора это (a,b,c), (d,e,f) and (g,h,i) то наша матрица будет выглядеть так:
Если нам нужно перемещение (j,k,l), то мы добавляем дополнительную колонку и строку, как говорили раньше:
И добавляем единицу [1] в вектор, как здесь:
Вращение в двухмерном пространстве
Так как в нашем случае у нас только одна ось вращения (расположенная на дисплее), единственное, что нам надо знать, это угол. Я говорил об этом ранее, упоминая, что мы можем применять тригонометрические функции для реализации функции двухмерного вращения наподобие этой:
Более элегантно это можно выразить в матричной форме. Чтобы определить матрицу, мы можем применить эту функцию к осям (1, 0) и (0, 1) для угла Θ, а затем включить полученные оси в колонки нашей матрицы. Итак, начнём с координатной оси X (1, 0). Если мы применим к ней нашу функцию, мы получим:
(1*cos(Θ) — 0*sin(Θ), 1*sin(Θ) + 0*cos(Θ)) = (cos(Θ), sin(Θ))
Затем, мы включаем координатную ось Y (0, 1). Получим:
(0*cos(Θ) — 1*sin(Θ), 0*sin(Θ) + 1*cos(Θ)) = (-sin(Θ), cos(Θ))
Включаем полученные координатные оси в матрицу, и получаем двухмерную матрицу вращения:
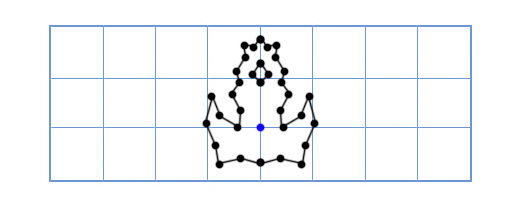
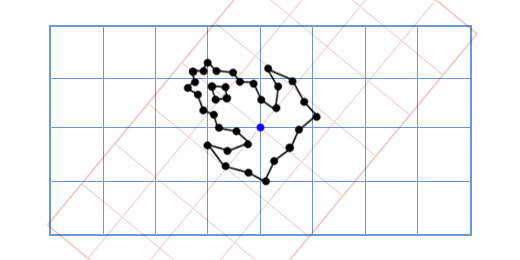
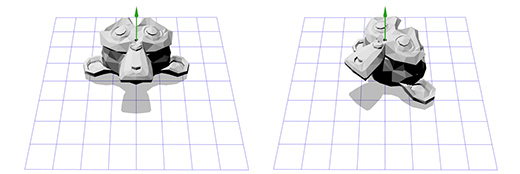
Применим эту матрицу к Сюзанне, мартышке из графического пакета Blender. Угол поворота Θ равен 45 градусов по часовой стрелке.
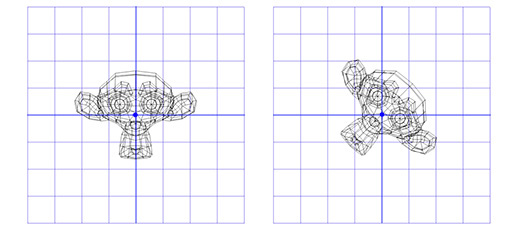
Как видите — это работает. Но что если нам надо осуществить вращение вокруг точки, отличной от (0, 0)?
Например, мы хотим вращать голову мартышки вокруг точки, расположенной в её ухе:
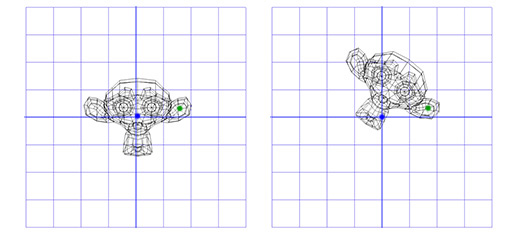
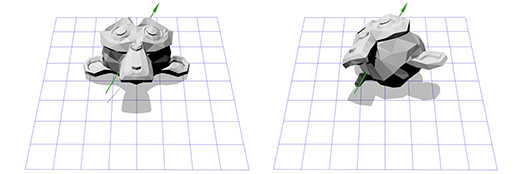
Чтобы сделать это, мы можем начать с создания матрицы перемещения (translation matrix) T, которая перемещает объект из начальной точки в точку вращения в ухе мартышки, и матрицу вращения R, для вращения объекта вокруг начальной точки. Теперь для вращения вокруг точки, расположенной в ухе, мы можем сперва переместить точку в ухе на место начальной точки, с помощью инвертирования матрицы T, записанной как T -1 . Затем, мы вращаем объект вокруг начальной точки, с помощью матрицы R, а затем применяем матрицу T для перемещения точки вращения назад, к своему исходному положению.
Ниже дана иллюстрация к каждому из описанных шагов:
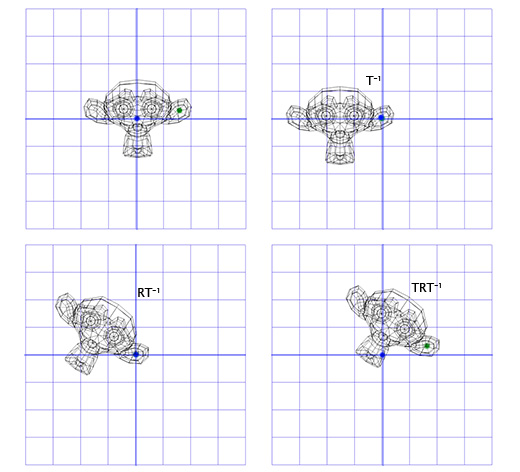
Это важный шаблон, который мы будем применять позднее — применение вращения для двух противоположных трансформаций позволяет нам вращать объект в другом «пространстве». Что очень удобно и полезно.
Теперь рассмотрим трёхмерное вращение.
Трёхмерное вращение
Вращение вокруг оси Z работает по тому-же принципу, что и вращение в двухмерном пространстве. Нам лишь нужно изменить нашу старую матрицу, добавив к ней дополнительную колонку и строку:
Применим эту матрицу к трехмерной версии Сюзанны, мартышки из пакета Blender. Угол поворота Θ пусть будет равен 45 градусов по часовой стрелке.
То-же самое. Вращение только вокруг оси Z ограничивает нас, как насчёт вращения вокруг произвольной оси?
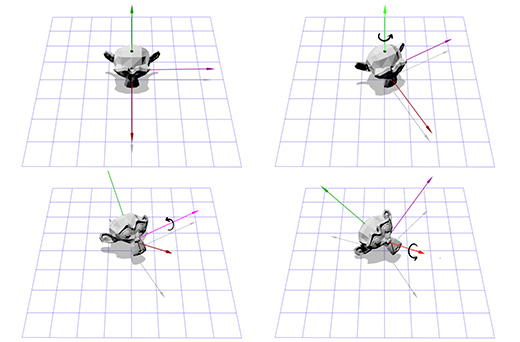
Вращение, определяемое осью и углом (Axis-angle rotation)
Представление вращения, определяемого осью и углом, также известно как вращение в экспоненциальных координатах, параметризованное вращением двух величин. Вектора, определяющего вращение направляющей оси (прямая линия) и угла, описывающего величину поворота вокруг этой оси. Вращение осуществляется согласно правилу правой руки.
Итак, вращение задаётся двумя параметрами (axis, angle), где axis — вектор оси вращения, а angle — угол вращения. Этот приём довольно прост и являет собой отправную точку для множества других операций вращения, с которыми я работаю. Как практически применить вращение, определяемое осью и углом?
Допустим мы имеем дело с осью вращения, показанной на рисунке ниже:
Мы знаем как вращать объект вокруг оси Z, и мы знаем как вращать объект в других пространствах. Итак, нам лишь надо создать пространство, где наша ось вращения будет являться осью Z. И если эта ось будет осью Z, то что будет являться осями X и Y? Займемся вычислениями сейчас.
Чтобы создать новые оси X и Y нам нужно лишь выбрать два вектора, которые перпендикулярны новой оси Z и перпендикулярны друг другу. Мы уже говорили ранее о векторном умножении, которое берёт два вектора и даёт в итоге перпендикулярный им вектор.
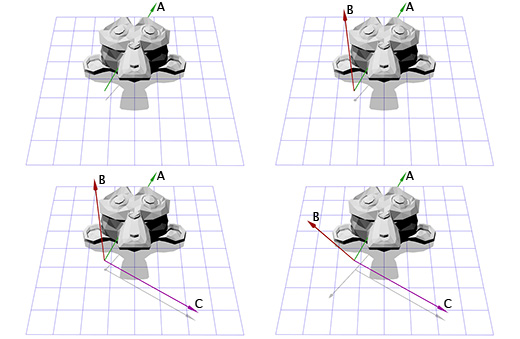
У нас есть один вектор сейчас, это ось вращения, назовём его A. Возьмём теперь случайный другой вектор B, который находится не в том-же направлении, что и вектор A. Пусть это будет (0, 0, 1) к примеру.
Теперь мы имеем ось вращения A и случайный вектор B, мы можем получить нормаль C, через векторное произведение A и B. С перпендикулярен векторам A и B. Теперь мы делаем вектор B перпендикулярным векторам A и C через их векторное произведение. И всё, у нас есть все нужные нам оси координат.
На словах это звучит сложно, но довольно просто выглядит в коде или будучи показанным в картинках.
Ниже показано, как это выглядит в коде:
Тут показана иллюстрация для каждого шага:
Теперь, имея информацию о новых координатных осях, мы можем составить матрицу M, включив каждую ось как колонку в эту матрицу. Нам надо убедиться, что вектор A является третьей колонкой, чтобы он был нашей новой осью координат Z.
Теперь это похоже на то, что мы делали для поворота в двухмерном пространстве. Мы можем применить инвертированную матрицу M, чтобы переместиться в новую систему координат, затем произвести вращение, согласно матрице R, чтобы повернуть объект вокруг оси Z, затем применить матрицу M, чтобы вернуться в исходное координатное пространство.
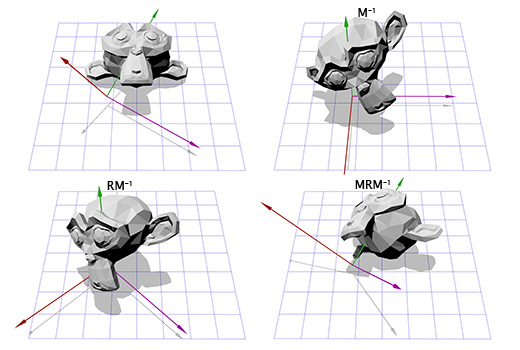
Теперь мы можем вращать объект вокруг произвольной оси. В конце концов мы можем просто создать матрицу T = T = M -1 RM и использовать её много раз, без дополнительных усилий с нашей стороны. Есть более эффективные способы конвертирования вращений, определяемых осью и углом во вращения, определяемые матрицами. Просто описанный нами подход показывает многое из того, о чём мы говорили ранее.
Вращение, определяемое осью и углом, возможно, самый интуитивно понятный способ. Применяя его, очень легко инвертировать поворот, поменяв знак у угла, и легко интерполировать, путём интерполяции угла. Однако тут есть серьёзное ограничение, и заключается оно в том, что такое вращение не является суммирующим. То есть вы не можете комбинировать два вращения, определяемых осью и углом в третье.
Вращение, определяемое осью и углом — хороший способ для начала, но оно должно быть преобразовано во что-то другое, чтобы использоваться в более сложных случаях.
Эйлеровские углы
Эйлеровские углы представляют собой другой способ вращения, заключающийся в трёх вложенных вращениях относительно осей X, Y и Z. Вы, возможно, сталкивались с их применением в играх, где камера показывает действие от первого лица, либо от третьего лица.
Допустим вы играете в шутер от первого лица и вы повернулись на 30 градусов влево, а затем посмотрели на 40 градусов вверх. В конце-концов в вас стреляют, попадают, и, в результате удара, камера поворачивается вокруг своей оси на 45 градусов. Ниже показано вращение с помощью углов Эйлера (30, 40, 45).
Углы Эйлера — удобное и простое в управлении средство. Но у этого способа есть два недостатка.
Первый, это вероятность возникновения ситуации под названием «блокировка оси» или «шарнирный замок» (gimbal lock). Представьте, что вы играете в шутер от первого лица, где вы можете посмотреть влево, вправо, вверх и вниз или повернуть камеру вокруг зрительной оси. Теперь представьте, что вы смотрите прямо вверх. В этой ситуации попытка взглянуть налево или направо будет аналогична попытке вращения камеры. Всё что мы можем вы этом случае, это вращать камеру вокруг своей оси, либо посмотреть вниз. Как вы можете представить, это ограничение делает непрактичным применение углов Эйлера в лётных симуляторах.
Второе — интерполяция между двумя эйлеровскими углами вращения не даёт кратчайшего пути между ними.
Например, у вас две интерполяции между двумя одинаковыми вращениями. Первая использует интерполяцию эйлеровского угла, вторая использует сферическую линейную интерполяцию (spherical linear interpolation (SLERP)), чтобы найти кратчайший путь.
Итак, что-же больше подойдет для интерполяции вращений? Может быть матрицы?
Вращение с помощью матриц
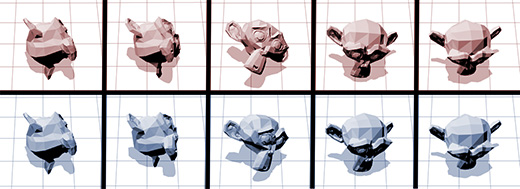
Как мы уже говорили ранее, матрицы вращения хранят в себе информацию о трёх осях. Это означает, что интерполяция между двумя матрицами лишь линейно интерполирует каждую ось. В результате это даёт нам эффективный путь, то так-же привносит новые проблемы. Например, тут показаны два вращения и одно интерполированное полу-вращение:
Как вы можете заметить, интерполированное вращение значительно меньше, чем любое из исходных вращений, и две оси более не перпендикулярны друг другу. Это логично, если вдуматься — середина отрезка, соединяющего любые две точки на сфере будет расположена ближе к центру сферы.
Это в свою очередь порождает известный «эффект фантика» (candy wrapper effect), при применении скелетной анимации. Ниже показана демонстрация этого эффекта на примере кролика из нашей игры Overgrowth (прим. переводчика: обратите внимание на середину туловища кролика).

Вращение, основанное на матричных операциях, очень полезно, так как они могут аккумулировать вращения без всяких проблем, вроде блокировки оси (gimbal lock), и может очень эффективно применяться к точкам сцены. Вот почему поддержка вращения на матрицах встроена в графические карты. Для любого типа трёхмерной графики матричный формат вращения — это всегда итоговый применяемый способ.
Однако, как мы уже знаем, матрицы не очень хорошо интерполируются, и они не столь интуитивно понятны.
Итак, остался только один главный формат вращения. Последний, но тем не менее, важный.
Кватернионы
Что-же такое кватернионы? Если очень кратко, то это альтернативный вариант вращения, основанный на оси и угле (axis-angle rotation), который существует в пространстве.
Подобно матрицам они могут аккумулировать вращения, то есть вы можете составлять из них цепочку вращений, без опаски получить блокировку оси (gimbal lock). И в то-же время, в отличие от матриц, они могут хорошо интерполироваться из одного положения в другое.
Являются-ли кватернионы лучшим решением, нежели остальные способы вращений (rotation formats)?
На сегодняшний день они комбинируют все сильные стороны других способов вращений. Но у них есть два слабых места, рассмотрев которые, мы придём к выводу, что кватернионы лучше использовать для промежуточных вращений. Итак, каковы недостатки кватернионов.
Во-первых кватернионы непросто отобразить на трёхмерном пространстве. И мы вынуждены всегда реализовывать вращение более простым способом, а затем конвертировать его. Во-вторых, кватернионы не могут эффективно вращать точки, и мы вынуждены конвертировать их в матрицы, чтобы повернуть значительное количество точек.
Это означает, что вы скорее всего не начнете или не закончите серию вращений с помощью кватернионов. Но с их помощью можно реализовать промежуточные вращения более эффективно, нежели при применении любого другого подхода.
«Внутренняя кухня» механизма кватернионов не очень понятна и не интересна мне. И, возможно, не будет интересна и вам, если только вы не математик. И я советую вам найти библиотеки, которые работают с кватернионами, чтобы облегчить вам решение ваших задач с их помощью.
Математические библиотеки «Bullet» или «Blender» будут хорошим вариантом для начала.
http://skysmart.ru/articles/mathematic/skalyarnoe-proizvedenie-vektorov
http://habr.com/ru/post/131931/
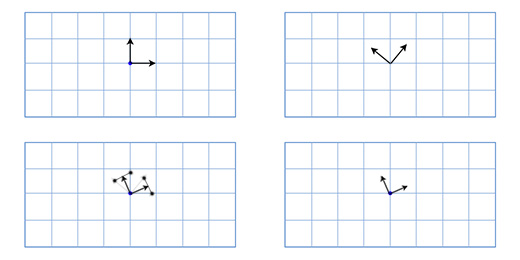
Как найти вектор(средний) между двумя другими векторами.
Хотя бы формулу плиз.
Буду благодарен.
На этой странице сайта, в категории Геометрия размещен ответ на вопрос
Как найти вектор(средний) между двумя другими векторами?. По уровню сложности вопрос рассчитан на учащихся
10 — 11 классов. Чтобы получить дополнительную информацию по
интересующей теме, воспользуйтесь автоматическим поиском в этой же категории,
чтобы ознакомиться с ответами на похожие вопросы. В верхней части страницы
расположена кнопка, с помощью которой можно сформулировать новый вопрос,
который наиболее полно отвечает критериям поиска. Удобный интерфейс
позволяет обсудить интересующую тему с посетителями в комментариях.
Видеоурок: Скалярное произведение векторов
Лекция: Координаты вектора; скалярное произведение векторов; угол между векторами
 Координаты вектора
Координаты вектора

Итак, как уже говорилось ранее, вектора – это направленный отрезок, у которого есть собственное начало и конец. Если начало и конец представлены некоторыми точками, значит на плоскости или в пространстве у них есть свои координаты.
Если же у каждой точки есть свои координаты, то мы можем получить и координаты целого вектора.
Допустим, мы имеем некоторый вектор, у которого начало и конец вектора имеют следующие обозначения и координаты: A(Ax; Ay) и B(Bx; By)
Чтобы получить координаты данного вектора, необходимо из координат конца вектора вычесть соответствующие координаты начала:

Для определения координаты вектора в пространстве следует воспользоваться следующей формулой:

Скалярное произведение векторов
Существует два способа определения понятия скалярного произведения:
- Геометрический способ. Согласно ему, скалярное произведение равно произведению величин данных модулей на косинус угла между ними.

- Алгебраический смысл. С точки зрения алгебры, скалярное произведение двух вектором – это некая величина, которая получается в результате суммы произведений соответствующих векторов.

Если векторы заданы в пространстве, то следует воспользоваться аналогичной формулой:

Свойства:
- Если умножить два одинаковых вектора скалярно, то их скалярное произведение будет не отрицательным:

- Если же скалярное произведение двух одинаковых векторов получилось равным нулю, то эти векторы считаются нулевыми:

- Если некоторый вектор умножить на себя же, то скалярное произведение получится равным квадрату его модуля:

- Скалярное произведение имеет коммуникативное свойство, то есть от перестановки векторов скалярное произведение не изменится:

- Скалярное произведение ненулевых векторов может быть равно нулю только в том случае, если вектора перпендикулярны друг другу:

- Для скалярного произведения векторов справедлив переместительный закон в случае с умножением одного из векторов на число:

- При скалярном произведении так же можно использовать дистрибутивное свойство умножения:

Угол между векторами

Если два вектора выходят из одной точки, то угол между ними – это угол, который описывает вектор при переходе по кратчайшему пути из своего первоначального положения в положение, при котором он будет сонаправленным.
Обобщив алгебраическую и геометрическую формулировку скалярного произведения можно получить, чему равен косинус угла между двумя векторами:

Нахождение угла между векторами с помощью скалярного произведения
Косинус угла между векторами a⃗=(a1;a2)vec{a}=(a_{1};a_{2}) и b⃗=(b1;b2)vec{b}=(b_{1};b_{2}) может быть вычислен по формуле
cos(a⃗,b⃗^)=a⃗⋅b⃗∣a⃗∣⋅∣b⃗∣=a1⋅b1+a2⋅b2a12+a22⋅b12+b22.cosleft(widehat{vec{a},vec{b}}right)=frac{vec{a}cdotvec{b}}{|vec{a}|cdot|vec{b}|}= frac{a_{1}cdot b_{1}+a_{2}cdot b_{2}}{sqrt{a_{1}^{2}+a_{2}^{2}}cdotsqrt{b_{1}^{2}+b_{2}^{2}}}.
Следовательно, угол между векторами a⃗=(a1;a2)vec{a}=(a_{1};a_{2}) и b⃗=(b1;b2)vec{b}=(b_{1};b_{2}) может быть вычислен по формуле
(a⃗,b⃗^)=arccos(a⃗⋅b⃗∣a⃗∣⋅∣b⃗∣)=arccos(a1⋅b1+a2⋅b2a12+a22⋅b12+b22).left(widehat{vec{a},vec{b}}right)=arccosleft(frac{vec{a}cdotvec{b}}{|vec{a}|cdot|vec{b}|}right)=arccosleft(frac{a_{1}cdot b_{1}+a_{2}cdot b_{2}}{sqrt{a_{1}^{2}+a_{2}^{2}}cdotsqrt{b_{1}^{2}+b_{2}^{2}}}right).
Пример 1
Найти угол между векторами a⃗=(1;−1)vec{a}=(1; -1) и b⃗=(1;2).vec{b}=(1; 2).
cos(a⃗,b⃗^)=a⃗⋅b⃗∣a⃗∣⋅∣b⃗∣=1⋅1+(−1)⋅212+(−1)2⋅12+22=1−22⋅5=−110.cosleft(widehat{vec{a},vec{b}}right)=frac{vec{a}cdot vec{b}}{left | vec{a} right |cdot left | vec{b} right |}=frac{1cdot1+(-1)cdot2}{sqrt{1^{2}+(-1)^{2}}cdot sqrt{1^{2}+2^{2}}}=frac{1-2}{sqrt{2}cdotsqrt{5}}=frac{-1}{sqrt{10}}.
(a⃗,b⃗^)=arccos(−110)=arccos(−1010).left ( widehat{vec{a},vec{b}} right )=arccosleft ( frac{-1}{sqrt{10}} right )=arccosleft ( frac{-sqrt{10}}{10} right ).
Ответ: (a⃗,b⃗^)=arccos(−1010).left ( widehat{vec{a},vec{b}} right )=arccosleft ( frac{-sqrt{10}}{10} right).
Пример 2
Найти угол между векторами a⃗=(2;3)vec{a}=(2; 3) и b⃗=(3;1).vec{b}=(3; 1).
cos(a⃗,b⃗^)=a⃗⋅b⃗∣a⃗∣⋅∣b⃗∣=2⋅3+3⋅122+32⋅32+12=6+313⋅10=9130=9130130.cosleft(widehat{vec{a},vec{b}}right)=frac{vec{a}cdot vec{b}}{left | vec{a} right |cdot left | vec{b} right |}=frac{2cdot3+3cdot1}{sqrt{2^{2}+3^{2}}cdot sqrt{3^{2}+1^{2}}}=frac{6+3}{sqrt{13}cdotsqrt{10}}=frac{9}{sqrt{130}}=frac{9sqrt{130}}{130}.
(a⃗,b⃗^)=arccos(9130130).left ( widehat{vec{a},vec{b}} right )=arccosleft ( frac{9sqrt{130}}{130} right ).
Ответ: (a⃗,b⃗^)=arccos(9130130).left ( widehat{vec{a},vec{b}} right )=arccos left ( frac{9sqrt{130}}{130} right ).
Косинус угла между векторами a⃗=(a1;a2;a3)vec{a}=(a_{1};a_{2};a_{3}) и b⃗=(b1;b2;b3)vec{b}=(b_{1};b_{2};b_{3}) может быть вычислен по формуле
cos(a⃗,b⃗^)=a⃗⋅b⃗∣a⃗∣⋅∣b⃗∣=a1⋅b1+a2⋅b2+a3⋅b3a12+a22+a32⋅b12+b22+b32.cosleft(widehat{vec{a},vec{b}}right)=frac{vec{a}cdotvec{b}}{|vec{a}|cdot|vec{b}|}= frac{a_{1}cdot b_{1}+a_{2}cdot b_{2}+a_{3}cdot b_{3}}{sqrt{a_{1}^{2}+a_{2}^{2}+a_{3}^{2}}cdotsqrt{b_{1}^{2}+b_{2}^{2}+b_{3}^{2}}}.
Следовательно, угол между векторами a⃗=(a1;a2;a3)vec{a}=(a_{1};a_{2};a_{3}) и b⃗=(b1;b2;b3)vec{b}=(b_{1};b_{2};b_{3}) может быть вычислен по формуле
(a⃗,b⃗^)=arccos(a⃗⋅b⃗∣a⃗∣⋅∣b⃗∣)=arccos(a1⋅b1+a2⋅b2+a3⋅b3a12+a22+a32⋅b12+b22+b32).left(widehat{vec{a},vec{b}}right)=arccosleft(frac{vec{a}cdotvec{b}}{|vec{a}|cdot|vec{b}|}right)=arccosleft(frac{a_{1}cdot b_{1}+a_{2}cdot b_{2}+a_{3}cdot b_{3}}{sqrt{a_{1}^{2}+a_{2}^{2}+ a_{3}^{2}}cdotsqrt{b_{1}^{2}+b_{2}^{2}+ b_{3}^{2}}}right).
Пример 3
Найти угол между векторами a⃗=(1;2;3)иb⃗=(1;−2;3).vec{a}=(1; 2; 3) и vec{b}=(1; -2; 3).
cos(a⃗,b⃗^)=a⃗⋅b⃗∣a⃗∣⋅∣b⃗∣=1⋅1+2⋅(−2)+3⋅312+22+32⋅12+(−2)2+32=1−4+914⋅14=614=37.cosleft(widehat{vec{a},vec{b}}right)=frac{vec{a}cdot vec{b}}{left | vec{a} right |cdot left | vec{b} right |}=frac{1cdot1+2cdot(-2)+3cdot3}{sqrt{1^{2}+2^{2}+3^{2}}cdot sqrt{1^{2}+(-2)^{2}+3^{2}}}=frac{1-4+9}{sqrt{14}cdotsqrt{14}}=frac{6}{14}=frac{3}{7}.
(a⃗,b⃗^)=arccos(37).left(widehat{vec{a},vec{b}}right)=arccosleft ( frac{3}{7} right ).
Ответ: (a⃗,b⃗^)=arccos(37).left(widehat{vec{a},vec{b}}right)=arccosleft ( frac{3}{7} right ).
Пример 4
Найти угол между векторами a⃗=(2;−1;−2)vec{a}=(2; -1; -2) и b⃗=(1;3;−2).vec{b}=(1; 3; -2).
cos(a⃗,b⃗^)=a⃗⋅b⃗∣a⃗∣⋅∣b⃗∣=2⋅1+(−1)⋅3+(−2)⋅(−2)22+(−1)2+(−2)2⋅12+32+(−2)2=2−3+49⋅14=33⋅14=114=1414.cosleft(widehat{vec{a},vec{b}}right)=frac{vec{a}cdot vec{b}}{left | vec{a} right |cdot left | vec{b} right |}=frac{2cdot1+(-1)cdot3+(-2)cdot(-2)}{sqrt{2^{2}+(-1)^{2}+(-2)^{2}}cdot sqrt{1^{2}+3^{2}+(-2)^{2}}}=frac{2-3+4}{sqrt{9}cdotsqrt{14}}=frac{3}{3cdotsqrt{14}}=frac{1}{sqrt{14}}=frac{sqrt{14}}{14}.
(a⃗,b⃗^)=arccos(1414).left(widehat{vec{a},vec{b}}right)=arccosleft ( frac{sqrt{14}}{14} right ).
Ответ: (a⃗,b⃗^)=arccos(1414).left(widehat{vec{a},vec{b}}right)=arccosleft ( frac{sqrt{14}}{14} right ).
Нахождение угла между векторами с помощью векторного произведения
Синус угла между векторами можно вычислить по формуле: sin(a⃗,b⃗^)=∣a⃗×b⃗∣∣a⃗∣⋅∣b⃗∣.sin(widehat{vec{a},vec{b}})=frac{left | vec{a}times vec{b} right |}{left | vec{a} right |cdotleft | vec{b} right |}.
Пример 1
Найти угол между векторами a⃗=(2;−1;2)vec{a}=(2;-1;2) и b⃗=(3;0;1).vec{b}=(3;0;1).
a⃗×b⃗=∣ijk2−12301∣=(−1−0)i−(2−6)j+(0+3)k=−i+4j+3k.vec{a}times vec{b}=begin{vmatrix}i&j&k\2&-1&2\3&0&1end{vmatrix}=(-1-0)i-(2-6)j+(0+3)k=-i+4j+3k.
∣a⃗×b⃗∣=(−1)2+42+32=1+16+9=26.left | vec{a}times vec{b} right |=sqrt{(-1)^{2}+4^{2}+3^{2}}=sqrt{1+16+9}=sqrt{26}.
∣a⃗∣=22+(−1)2+22=4+1+4=9=3.left | vec{a} right |=sqrt{2^{2}+(-1)^{2}+2^{2}}=sqrt{4+1+4}=sqrt{9}=3.
∣b⃗∣=32+02+12=9+0+1=10.left | vec{b} right |=sqrt{3^{2}+0^{2}+1^{2}}=sqrt{9+0+1}=sqrt{10}.
sin(a⃗,b⃗^)=26310=132325=1335=6515.sin(widehat{vec{a},vec{b}})=frac{sqrt{26}}{3sqrt{10}}=frac{sqrt{13}sqrt{2}}{3sqrt{2}sqrt{5}}=frac{sqrt{13}}{3sqrt{5}}=frac{sqrt{65}}{15}.
(a⃗,b⃗^)=arcsin(6515).(widehat{vec{a},vec{b}})=arcsinleft ( frac{sqrt{65}}{15} right ).
Ответ: (a⃗,b⃗^)=arcsin(6515).(widehat{vec{a},vec{b}})=arcsinleft ( frac{sqrt{65}}{15} right ).
Пример 2
Найти угол между векторами a⃗=(1;1;3)vec{a}=(1;1;3) и b⃗=(0;1;1).vec{b}=(0;1;1).
a⃗×b⃗=∣ijk113011∣=(1−3)i−(1−0)j+(1−0)k=−2i−j+k.vec{a}times vec{b}=begin{vmatrix}i&j&k\1&1&3\0&1&1end{vmatrix}=(1-3)i-(1-0)j+(1-0)k=-2i-j+k.
∣a⃗×b⃗∣=(−2)2+(−1)2+12=4+1+1=6.left | vec{a}times vec{b} right |=sqrt{(-2)^{2}+(-1)^{2}+1^{2}}=sqrt{4+1+1}=sqrt{6}.
∣a⃗∣=12+12+32=1+1+9=11.left | vec{a} right |=sqrt{1^{2}+1^{2}+3^{2}}=sqrt{1+1+9}=sqrt{11}.
∣b⃗∣=02+12+12=0+1+1=2.left | vec{b} right |=sqrt{0^{2}+1^{2}+1^{2}}=sqrt{0+1+1}=sqrt{2}.
sin(a⃗,b⃗^)=6112=32112=311=3311.sin(widehat{vec{a},vec{b}})=frac{sqrt{6}}{sqrt{11}sqrt{2}}=frac{sqrt{3}sqrt{2}}{sqrt{11}sqrt{2}}=frac{sqrt{3}}{sqrt{11}}=frac{sqrt{33}}{11}.
(a⃗,b⃗^)=arcsin(3311).(widehat{vec{a},vec{b}})=arcsinleft ( frac{sqrt{33}}{11} right ).
Ответ: (a⃗,b⃗^)=arcsin(3311).(widehat{vec{a},vec{b}})=arcsinleft ( frac{sqrt{33}}{11} right ).
Тест по теме “Как найти угол между двумя векторами”
Содержание:
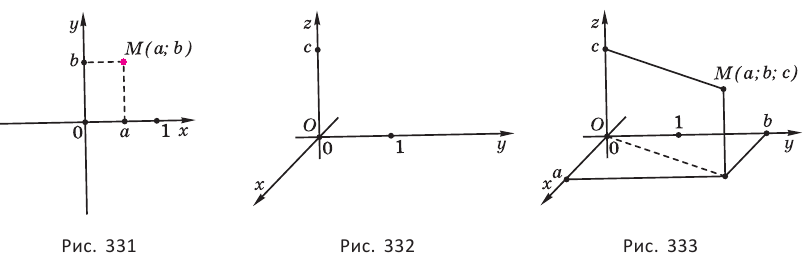
Система координат на плоскости позволяет установить взаимно однозначное соответствие между точками плоскости и упорядоченными парами чисел (рис. 331). Координаты вы широко использовали для графического представления зависимостей, при решении систем уравнений, а также в геометрии, чтобы геометрическую задачу свести к задаче алгебраической.
Декартова система координат в пространстве
Чтобы ввести декартову систему координат в пространстве, выберем точку 
Б) Вы знаете, что по координатам концов  и
и  отрезка
отрезка  на плоскости можно определить его длину:
на плоскости можно определить его длину:

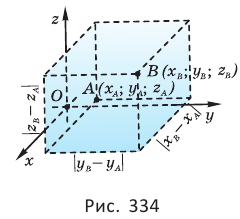
Аналогичная формула выражает длину отрезка  в пространстве через координаты его концов
в пространстве через координаты его концов  и
и 

Чтобы доказать эту формулу, рассмотрим плоскости, которые проходят через точки  и
и  перпендикулярно координатным осям. Получаем, что отрезок
перпендикулярно координатным осям. Получаем, что отрезок  по сути является диагональю прямоугольного параллелепипеда, рёбра которого параллельны координатным осям и имеют длины
по сути является диагональю прямоугольного параллелепипеда, рёбра которого параллельны координатным осям и имеют длины 
и  (рис. 334) (если же какие-либо из проведённых плоскостей совпадут, то параллелепипед превратится в прямоугольник или отрезок).
(рис. 334) (если же какие-либо из проведённых плоскостей совпадут, то параллелепипед превратится в прямоугольник или отрезок).
Ранее вы доказывали, что координаты середины отрезка равны средним арифметическим соответствующих координат его концов. Это утверждение остаётся истинным и в случае пространства (см. пример 2 в § 6): если  и точка
и точка  — середина отрезка
— середина отрезка  то
то

Пример:
На оси ординат найдём точку, равноудалённую от точек  и
и 
Решение:
Пусть  — искомая точка. Тогда
— искомая точка. Тогда  и, поскольку
и, поскольку  то
то

или  Отсюда
Отсюда 
Ответ: 
Пример:
Найдём условие, задающее геометрическое место точек, равноудалённых от начала координат и от точки 
Решение:
Согласно геометрическим соображениям искомое множество состоит из всех тех точек, размещённых на серединных перпендикулярах к отрезку  Такие точки заполняют плоскость, проходящую через середину отрезка
Такие точки заполняют плоскость, проходящую через середину отрезка  перпендикулярно ему. Найдём условие, которому удовлетворяют координаты
перпендикулярно ему. Найдём условие, которому удовлетворяют координаты  произвольной точки
произвольной точки  этой плоскости. Условие
этой плоскости. Условие  означает, что
означает, что

Ответ: Искомое геометрическое место точек есть плоскость, которая задаётся уравнением 
Пример:
Найдём условие, которому удовлетворяют координаты точек плоскости  проходящей через точку
проходящей через точку  перпендикулярно прямой
перпендикулярно прямой  где
где 
Решение:
Пусть  — произвольная точка плоскости
— произвольная точка плоскости  Тогда из прямоугольного треугольника
Тогда из прямоугольного треугольника  по теореме Пифагора имеем:
по теореме Пифагора имеем: 
Поскольку

 то
то
 или
или

Ответ: 
Вектор. Действия над векторами
А) С векторами вы встречались в курсе физики девятого класса, когда знакомились с векторными величинами. Физическая величина является векторной, если она характеризуется не только числовым значением, но и направлением. Такие величины, как сила, скорость и другие, обозначают направленными отрезками. Длина направленного отрезка (стрелки) характеризует числовое значение векторной величины (её модуль).
Особенностью понятия вектор является то, что все основные определения и свойства, связанные с этим понятием, формулируются почти одинаково как в планиметрии, так и в стереометрии.
Вектор в геометрии представляется направленным отрезком (рис. 336), начало которого считается началом вектора, а конец — концом вектора.
Расстояние между началом направленного отрезка и его концом считается длиной вектора.
Направленные отрезки  и
и  представляют один вектор, если они одинаково направлены и имеют одинаковую длину (рис. 337). В таком случае говорят, что векторы
представляют один вектор, если они одинаково направлены и имеют одинаковую длину (рис. 337). В таком случае говорят, что векторы  и
и  равны, и пишут
равны, и пишут  Векторы
Векторы  и
и  равны тогда и только тогда, когда совпадают середины отрезков
равны тогда и только тогда, когда совпадают середины отрезков  и
и  (рис. 338).
(рис. 338).
Это напоминает ситуацию с дробями: определённое число может представляться разными дробями, например, дроби 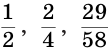 представляют одно и то же число. Дроби
представляют одно и то же число. Дроби  и
и  равны тогда и только тогда, когда
равны тогда и только тогда, когда 
Если вектор  изображается направленным отрезком
изображается направленным отрезком  то говорят, что этот вектор отложен от точки
то говорят, что этот вектор отложен от точки  Вектор можно, и при этом однозначно, отложить от любой точки.
Вектор можно, и при этом однозначно, отложить от любой точки.
Вектор, представленный направленным отрезком  называют нулевым:
называют нулевым:  Векторы, представленные направленными отрезками
Векторы, представленные направленными отрезками  и
и  называют противоположными и пишут
называют противоположными и пишут 
Если ненулевые векторы  и
и  отложены от одной точки:
отложены от одной точки: 
 то угол
то угол  называется углом между векторами и
называется углом между векторами и  .
.
Ненулевые векторы  и
и  называют коллинеарными, если прямые
называют коллинеарными, если прямые  и
и  параллельны или совпадают. Нулевой вектор считают кол-линеарным с любым вектором.
параллельны или совпадают. Нулевой вектор считают кол-линеарным с любым вектором.
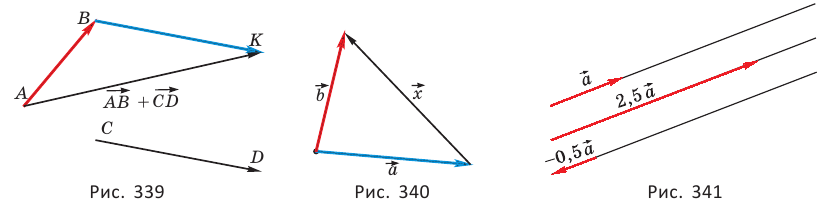
Векторы можно складывать и умножать на число. Чтобы сложить векторы  и
и  можно один из них заменить таким равным ему вектором, чтобы конец первого направленного отрезка совпадал с началом второго:
можно один из них заменить таким равным ему вектором, чтобы конец первого направленного отрезка совпадал с началом второго:

и тогда сумма векторов представляется направленным отрезком  (рис. 339).
(рис. 339).
Сложение векторов имеет переместительное свойство, т. е.  сочетательное свойство, т. е.
сочетательное свойство, т. е.  кроме того, уравнение
кроме того, уравнение  всегда имеет единственное решение, которое называют разностью векторов
всегда имеет единственное решение, которое называют разностью векторов  и
и  (рис. 340).
(рис. 340).
Произведением вектора  на число
на число  является такой вектор
является такой вектор  что, во-первых, векторы
что, во-первых, векторы  и
и  одинаково направлены при
одинаково направлены при  и противоположно направлены при
и противоположно направлены при  и, во-вторых, длины векторов
и, во-вторых, длины векторов  и
и  связаны равенством
связаны равенством  (рис. 341). Векторы
(рис. 341). Векторы  и
и  являются коллинеарными. При этом верно равенство
являются коллинеарными. При этом верно равенство  Если
Если  то произведением
то произведением  является нулевой вектор.
является нулевой вектор.
С действием умножения вектора на число связываются два распределительных свойства—  и
и 
Б) Если векторы  и
и  коллинеарны, то один из них можно выразить через другой: либо
коллинеарны, то один из них можно выразить через другой: либо либо
либо  при определённых числах
при определённых числах  и
и 
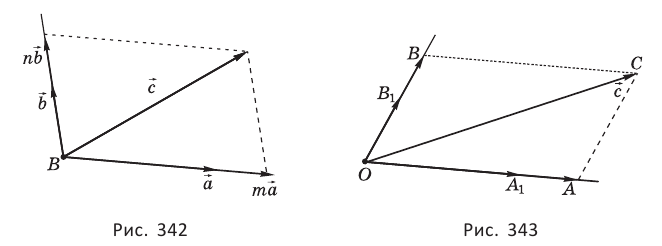
Для любых двух векторов существует плоскость, которой они параллельны. Векторы, параллельные одной плоскости, называют компланарными. Если векторы  и
и  неколлинеарны, то любой вектор
неколлинеарны, то любой вектор  компланарный с ними, можно однозначно выразить через векторы и :
компланарный с ними, можно однозначно выразить через векторы и :  (рис. 342).
(рис. 342).
Истинно и обратное утверждение: если векторы  и
и  связаны равенством
связаны равенством  то они компланарны.
то они компланарны.
Действительно, если векторы  и
и  представить направленными отрезками с общим началом
представить направленными отрезками с общим началом  (рис. 343), то
(рис. 343), то  поэтому точки
поэтому точки  и
и  находятся в плоскости
находятся в плоскости 
Теорема 1. Если векторы  и
и  некомпланарны, то для любого вектора
некомпланарны, то для любого вектора  существует такая единственная упорядоченная тройка действительных чисел
существует такая единственная упорядоченная тройка действительных чисел  что
что 
Доказательство: Сначала докажем существование нужных чисел. Представим векторы  и
и  направленными отрезками с общим началом
направленными отрезками с общим началом  Через точку
Через точку  проведём прямую
проведём прямую  параллельно
параллельно  и пусть
и пусть  — точка пересечения прямой
— точка пересечения прямой  с плоскостью
с плоскостью  (рис. 344). Тогда
(рис. 344). Тогда  Поскольку вектор
Поскольку вектор  ненулевой и векторы
ненулевой и векторы  и
и  коллинеарны, то существует такое число
коллинеарны, то существует такое число  что
что 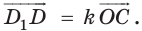 А поскольку векторы
А поскольку векторы  и
и  компланарны, а векторы
компланарны, а векторы  и
и  неколлинеарны, то существуют такие числа
неколлинеарны, то существуют такие числа  и
и  что
что 
Поэтому

Теперь докажем единственность представления. Допустим, что существуют две разные упорядоченные тройки чисел  и
и  при которых
при которых  и
и  Тогда
Тогда  и
и 
Поскольку тройки чисел  и
и  различны, то числа на соответствующих местах не могут все совпадать. Пусть, например,
различны, то числа на соответствующих местах не могут все совпадать. Пусть, например,  В этом случае из последнего равенства можно выразить вектор
В этом случае из последнего равенства можно выразить вектор  Последнее равенство означает, что векторы
Последнее равенство означает, что векторы  и
и  компланарны. Полученное противоречие с условием означает, что сделанное допущение о существовании двух разных троек чисел неверно.
компланарны. Полученное противоречие с условием означает, что сделанное допущение о существовании двух разных троек чисел неверно.
Следствие 1. Из четырёх любых векторов пространства один может быть выражен через три других.
Действительно, если среди данных четырёх векторов пространства есть три некомпланарных, то четвёртый вектор можно через эти три выразить. Далее, если среди данных четырёх векторов пространства любые три компланарны, то может найтись среди них два неколлинеарных, или любых два вектора коллинеарны. В первом случае через эти два неколлинеарных вектора можно выразить третий и к полученному выражению прибавить четвёртый, умноженный на ноль. Во втором случае один из векторов можно выразить через другой и потом прибавить к этому выражению два оставшихся вектора, умноженных на ноль.
Таким образом, теперь вы знаете, что из двух коллинеарных векторов один может быть выражен через другой, из трёх компланарных векторов один может быть выражен через два других, а из четырёх любых векторов один может быть выражен через три других.
Пример №1
На кронштейне, состоящем из подкоса  и растяжки
и растяжки  подвешен груз. Кронштейн прикреплён к вертикальной стене
подвешен груз. Кронштейн прикреплён к вертикальной стене  растяжка занимает горизонтальное положение (рис. 345). Найдём силы, действующие на подкос и растяжку, если угол между ними равен
растяжка занимает горизонтальное положение (рис. 345). Найдём силы, действующие на подкос и растяжку, если угол между ними равен  a масса груза равна
a масса груза равна 
Решение:
Сила тяжести выражается вектором  направленным вниз по вертикали. Выразим его суммой векторов, которые коллинеарны векторам
направленным вниз по вертикали. Выразим его суммой векторов, которые коллинеарны векторам  и
и  Для этого построим параллелограмм
Для этого построим параллелограмм  с диагональю
с диагональю  стороны которого расположены на прямых
стороны которого расположены на прямых  и
и  (рис. 346).
(рис. 346).
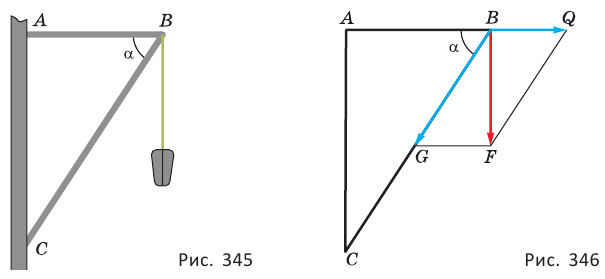
Поскольку углы  и
и  являются внутренними накрест лежащими при параллельных прямых
являются внутренними накрест лежащими при параллельных прямых  и
и  и секущей
и секущей  то в прямоугольном треугольнике
то в прямоугольном треугольнике  угол
угол  равен
равен  и катет
и катет  равен
равен  Поэтому
Поэтому
 и
и 
Ответ. Под воздействием груза подкос сжимается с силой  а растяжка растягивается с силой
а растяжка растягивается с силой 
Пример №2
В правильной четырёхугольной пирамиде  точки
точки  и
и  — середины рёбер
— середины рёбер  и
и  соответственно. Плоскость, проходящая через точки
соответственно. Плоскость, проходящая через точки  и
и  параллельно прямой
параллельно прямой  пересекает прямую
пересекает прямую  в точке
в точке  (рис. 347). Найдём отношение
(рис. 347). Найдём отношение 
Решение:
Поскольку  то векторы
то векторы  и
и  полностью определяют пирамиду. Поскольку векторы
полностью определяют пирамиду. Поскольку векторы  и
и  коллинеарны, то вектор
коллинеарны, то вектор  можно выразить через
можно выразить через  при определённом числе
при определённом числе  Вектор
Вектор  можно выразить через векторы
можно выразить через векторы  и
и  используя то, что точка
используя то, что точка  находится в плоскости, проходящей через точки
находится в плоскости, проходящей через точки  и
и  параллельно прямой
параллельно прямой  Вектор
Вектор  компланарен с векторами
компланарен с векторами  и
и  поэтому
поэтому  при определённых множителях
при определённых множителях  и
и  Выразим векторы
Выразим векторы  и
и  через векторы
через векторы  и
и 
Имеем:

Поэтому

Учтём теперь то, что через некомпланарные векторы  и
и  каждый вектор пространства, в том числе и вектор
каждый вектор пространства, в том числе и вектор  выражается единственным образом. Поэтому должны одновременно выполняться условия:
выражается единственным образом. Поэтому должны одновременно выполняться условия: 
 Отсюда получаем, что
Отсюда получаем, что  А поскольку
А поскольку  то
то 
В) Пусть в пространстве выбрана декартова система координат  С каждой точкой
С каждой точкой  пространства можно связать вектор
пространства можно связать вектор  Это соответствие между точками пространства и векторами является взаимно однозначным: различным точкам соответствуют различные векторы с началом
Это соответствие между точками пространства и векторами является взаимно однозначным: различным точкам соответствуют различные векторы с началом  и концами в этих точках, и различным векторам соответствуют различные точки пространства.
и концами в этих точках, и различным векторам соответствуют различные точки пространства.
Будем говорить, что вектор  имеет координаты
имеет координаты  в декартовой системе координат
в декартовой системе координат  если
если  и точка
и точка  имеет координаты
имеет координаты  Это будем записывать:
Это будем записывать: 
Теорема 2. Если  то
то 
Доказательство: Пусть задана декартова система координат  и
и  Пусть также
Пусть также  и
и  Нужно доказать, что
Нужно доказать, что  и
и 
Поскольку  то середины отрезков
то середины отрезков  и
и  совпадают.
совпадают.
Середина отрезка  имеет координаты
имеет координаты  а середина отрезка
а середина отрезка  — координаты
— координаты  Получаем:
Получаем:

Отсюда:
 и
и 
Теорема 3. Если  то
то

Доказательство: Пусть задана декартова система координат  и
и  (рис. 348). Поскольку
(рис. 348). Поскольку
 то
то  По теореме 2 получаем:
По теореме 2 получаем:
 и
и 
Поэтому
 и
и 
Значит, вектор  имеет координаты
имеет координаты 
Докажем второе утверждение теоремы 3. Пусть сначала  и
и  Сравним одноимённые, например первые, координаты векторов
Сравним одноимённые, например первые, координаты векторов  и
и  Для этого через точки
Для этого через точки  и
и  проведём плоскости, параллельные плоскости
проведём плоскости, параллельные плоскости  (рис. 349), которые пересекают ось
(рис. 349), которые пересекают ось  в точках
в точках  и
и  Из подобия треугольников
Из подобия треугольников  и
и  следует, что
следует, что  Аналогично получается, что
Аналогично получается, что  и
и 
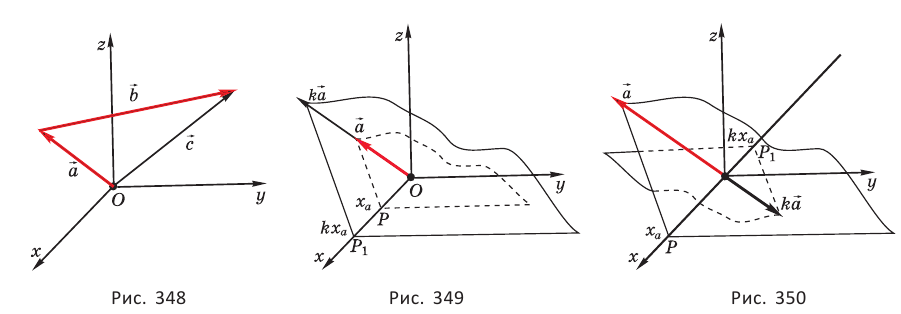
Если же  то аналогичные рассуждения проводятся для рисунка 350. Векторы
то аналогичные рассуждения проводятся для рисунка 350. Векторы  называют единичными координатными векторами.
называют единичными координатными векторами.
Следствие 2. Если  то
то 
Пример №3
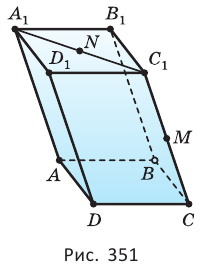
Дан параллелепипед  Точки
Точки  и
и  — середины отрезков
— середины отрезков  и
и  соответственно (рис. 351). Выразим:
соответственно (рис. 351). Выразим:
а) векторы  и
и  через векторы
через векторы  и
и 
б) векторы  и
и  через векторы
через векторы  и
и 
Решение:
а) Имеем:
б) Будем рассматривать полученные равенства — 
 как систему условий, из которой нужно найти
как систему условий, из которой нужно найти  и
и  Из первого условия выразим
Из первого условия выразим
 и исключим
и исключим  из двух других:
из двух других:

Теперь из последнего равенства выразим  и исключим
и исключим  из предыдущего:
из предыдущего:

Далее можно последовательно выразить  и
и  через векторы
через векторы
 и
и

Пример №4
Через диагональ  грани треугольной призмы
грани треугольной призмы  проведена плоскость так, что она пересекает диагонали
проведена плоскость так, что она пересекает диагонали  и
и  граней в точках
граней в точках  и
и  соответственно (рис. 352). Найдём отношение
соответственно (рис. 352). Найдём отношение  учитывая, что
учитывая, что 
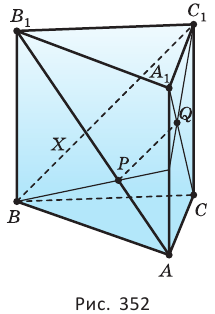
Решение:
Векторы  и
и  некомпланарны, поэтому через них можно выразить векторы
некомпланарны, поэтому через них можно выразить векторы  и
и 

Учтём, что  и
и  коллинеарны. Значит, существует такое число
коллинеарны. Значит, существует такое число  что
что 
Аналогично, существует такое число  что
что  Кроме того,
Кроме того,
 и
и 
Значит,

Из условия следует, что векторы  и
и  коллинеарны. Поэтому
коллинеарны. Поэтому  при определённом
при определённом 
Поскольку  и учитывая однозначность разложения вектора по трём некомпланарным векторам, получаем, что
и учитывая однозначность разложения вектора по трём некомпланарным векторам, получаем, что  Отсюда находим
Отсюда находим 
Ответ: 
Скалярное произведение векторов
А) Скалярным произведением векторов  и
и  называется число
называется число  , равное произведению длин этих векторов на косинус угла
, равное произведению длин этих векторов на косинус угла  между ними:
между ними:

Скалярное произведение векторов имеет переместительное свойство  распределительное свойство
распределительное свойство  кроме того, множитель можно выносить за знак скалярного произведения
кроме того, множитель можно выносить за знак скалярного произведения  С помощью скалярного произведения можно находить длины векторов и косинусы углов между ними:
С помощью скалярного произведения можно находить длины векторов и косинусы углов между ними: 
У нулевого вектора направление не определено, поэтому удобно считать, что нулевой вектор перпендикулярен любому другому вектору.
С учётом этого получается следующее полезное утверждение: два вектора перпендикулярны тогда и только тогда, когда их скалярное произведение равно нулю.
Теорема 1. Скалярное произведение векторов  и
и  выражается через их координаты в декартовой системе
выражается через их координаты в декартовой системе
равенством 
Доказательство: Поскольку  то
то
Находим далее:

Аналогично,

Поэтому 
Пример №5
Найдём длину вектора 
Имеем:  Поэтому
Поэтому 
Пример №6
Найдём угол  между векторами
между векторами  и
и 
Имеем: 
Поэтому:
Пример №7
Найдём длину вектора  равного
равного  учитывая, что векторы
учитывая, что векторы  и
и  перпендикулярны вектору
перпендикулярны вектору  а между собой образуют угол 60° и
а между собой образуют угол 60° и 
Имеем:

Поскольку

Поэтому 
Б) Вы знаете, что плоскость в пространстве можно задать тремя точками, не лежащими на одной прямой. Поскольку существует единственная плоскость, проходящая через данную точку перпендикулярно данной прямой, то плоскость можно задавать указанием одной из её точек и вектора, ей перпендикулярного.
Теорема 2. Если плоскость проходит через точку  перпендикулярно ненулевому вектору
перпендикулярно ненулевому вектору  то координаты
то координаты  любой точки
любой точки  этой плоскости удовлетворяют уравнению
этой плоскости удовлетворяют уравнению 
Доказательство: Если  — произвольная точка плоскости,
— произвольная точка плоскости,
проходящей через точку  перпендикулярно вектору
перпендикулярно вектору 
то векторы  и
и  перпендикулярны, а потому их скалярное произведение равно нулю:
перпендикулярны, а потому их скалярное произведение равно нулю:

Истинно и обратное утверждение.
Теорема 3. Уравнению  в котором коэффициенты
в котором коэффициенты  не равны нулю одновременно, удовлетворяет любая точка некоторой плоскости. Этой плоскости перпендикулярен вектор
не равны нулю одновременно, удовлетворяет любая точка некоторой плоскости. Этой плоскости перпендикулярен вектор 
Доказательство: Если есть уравнение  и числа
и числа 
 не равны нулю одновременно, то можно найти упорядоченную тройку чисел
не равны нулю одновременно, то можно найти упорядоченную тройку чисел  удовлетворяющую этому уравнению. Например, если
удовлетворяющую этому уравнению. Например, если  то можно, взяв
то можно, взяв  и
и  найти значение переменной
найти значение переменной  так, чтобы тройка чисел
так, чтобы тройка чисел  удовлетворяла уравнению
удовлетворяла уравнению 
Поскольку  то условия
то условия  и
и  равносильны. Получили, что исходное уравнение равносильно уравнению
равносильны. Получили, что исходное уравнение равносильно уравнению  которому удовлетворяют координаты
которому удовлетворяют координаты  любой точки
любой точки  расположенной на прямой, проходящей через точку
расположенной на прямой, проходящей через точку  перпендикулярно вектору
перпендикулярно вектору  т. е. любой точки плоскости, проходящей через точку
т. е. любой точки плоскости, проходящей через точку  перпендикулярно вектору
перпендикулярно вектору 
Пример №8
Найдём уравнение плоскости, проходящей через точки А(2; 1; 3), В(4; 1, 2) и С(5; 2; 1).
Решение:
Найдём координаты векторов  и
и  Поскольку координаты (2; 0; -1) и (3; 1; -2) этих векторов не пропорциональны, то сами векторы не коллинеарны, и, значит, точки
Поскольку координаты (2; 0; -1) и (3; 1; -2) этих векторов не пропорциональны, то сами векторы не коллинеарны, и, значит, точки  и
и  не лежат на одной прямой, они задают единственную плоскость.
не лежат на одной прямой, они задают единственную плоскость.
Чтобы записать уравнение плоскости  используя теорему 2, найдём вектор
используя теорему 2, найдём вектор  перпендикулярный этой плоскости. Поскольку
перпендикулярный этой плоскости. Поскольку  и
и  то
то  и
и  Из этих условий получаем:
Из этих условий получаем:  Таким образом, в качестве искомого вектора можно взять вектор с координатами (1; 1; 2).
Таким образом, в качестве искомого вектора можно взять вектор с координатами (1; 1; 2).
Теперь можно записать уравнение плоскости, которая проходит через точку перпендикулярно найденному вектору
перпендикулярно найденному вектору 
 или
или 
В) Теорема 4. Если плоскость имеет уравнение  то расстояние до неё от точки
то расстояние до неё от точки  равно
равно 
Доказательство: Пусть из точки  на данную плоскость опущен перпендикуляр
на данную плоскость опущен перпендикуляр  основание которого — точка
основание которого — точка  — имеет координаты
— имеет координаты
 Тогда вектор
Тогда вектор  коллинеарен с
коллинеарен с
вектором  Поскольку угол между этими векторами равен 0°
Поскольку угол между этими векторами равен 0°
или 180°, то  откуда
откуда

Находим

поскольку координаты точки  удовлетворяют уравнению плоскости. Далее:
удовлетворяют уравнению плоскости. Далее:  А поскольку искомое расстояние равно длине вектора
А поскольку искомое расстояние равно длине вектора  то требуемое утверждение обосновано.
то требуемое утверждение обосновано.
Пример №9
Найдём расстояние от точки  до плоскости, заданной уравнением
до плоскости, заданной уравнением 
Решение:
Используя теорему 4, получаем:
Ответ: 5.
Применение векторов и координат
А) В ряде задач условие содержит сведения о параллельности некоторых прямых или об их точках пересечения, об отношениях длин параллельных отрезков. Для решения таких задач может быть полезным применение векторов, как это было при решении примера 3 из параграфа 12. При решении таких задач достаточно использовать действия сложения векторов и умножения вектора на число. Рассмотрим ещё один пример.
Пример №10
Пусть  и
и  — параллелограммы в пространстве,
— параллелограммы в пространстве,  — середины отрезков
— середины отрезков  соответственно. Докажем, что середины отрезков
соответственно. Докажем, что середины отрезков  и
и  совпадают.
совпадают.
Решение. Выберем в пространстве точку  Тогда положение каждой точки полностью характеризуется соответствующим вектором. Из условия
Тогда положение каждой точки полностью характеризуется соответствующим вектором. Из условия
следует, что  и
и  Точки
Точки  определяются
определяются
векторами 

Чтобы доказать, что середины отрезков  и
и  совпадают, докажем, что
совпадают, докажем, что 
Находим: 

А поскольку
 и
и 
то выражения в двух последних скобках принимают одинаковые значения. Требуемое утверждение доказано.
Б) При решении других задач целесообразно пользоваться скалярным умножением векторов. Такими являются задачи, в которых нужно использовать или определять некоторые расстояния или углы.
Пример №11
Найдём угол между скрещивающимися диагоналями соседних боковых граней правильной шестиугольной призмы, у которой боковые грани — квадраты.
Решение:
Пусть нужно найти угол между прямыми  и
и  (рис. 370). Искомый угол может совпадать с углом между векторами, параллельными данным прямым, или дополнять его до 180°. Поэтому косинус искомого угла совпадает с модулем косинуса угла между векторами
(рис. 370). Искомый угол может совпадать с углом между векторами, параллельными данным прямым, или дополнять его до 180°. Поэтому косинус искомого угла совпадает с модулем косинуса угла между векторами  и
и 
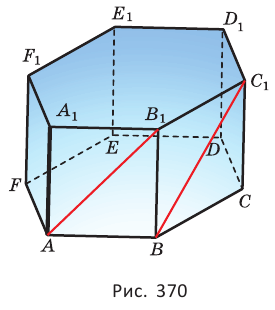
Выразим векторы  и
и  через некомпланарные векторы
через некомпланарные векторы  и
и  Примем длину ребра призмы за а и найдём скалярное произведение векторов:
Примем длину ребра призмы за а и найдём скалярное произведение векторов:

А поскольку
 то
то
Ответ: 
Скалярное произведение векторов можно использовать и для нахождения угла между плоскостями. Как и при определении угла между прямыми, так и при определении угла  между плоскостями можно использовать векторы
между плоскостями можно использовать векторы  и
и  только перпендикулярные рассматриваемым плоскостям:
только перпендикулярные рассматриваемым плоскостям:
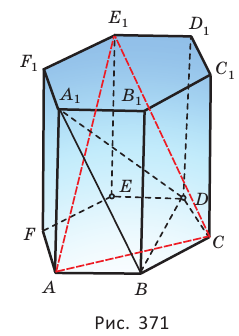
Пример №12
У правильной шестиугольной призмы  все рёбра имеют длину 1 (рис. 371). Найдём угол между плоскостями
все рёбра имеют длину 1 (рис. 371). Найдём угол между плоскостями  и
и 
Решение:
Для получения ответа нужно определить векторы  и
и  перпендикулярные плоскостям
перпендикулярные плоскостям  и
и  соответственно. Они должны удовлетворять условиям
соответственно. Они должны удовлетворять условиям  и
и 
Используем прямоугольную декартову систему координат, начало которой находится в центре  основания
основания  и точки
и точки  и
и  имеют координаты
имеют координаты  и
и  соответственно. Тогда точки
соответственно. Тогда точки  и
и  будут иметь координаты
будут иметь координаты  и
и  соответственно. Найдём координаты векторов
соответственно. Найдём координаты векторов  и
и  по координатам их концевых точек:
по координатам их концевых точек:

Поскольку  то координаты
то координаты  вектора
вектора 
удовлетворяют условиям  и
и  Этим условиям удовлетворяют числа
Этим условиям удовлетворяют числа  Поэтому в качестве вектора, перпендикулярного плоскости
Поэтому в качестве вектора, перпендикулярного плоскости  можно взять вектор
можно взять вектор 
Для нахождения вектора  действовать будем аналогично. Координаты
действовать будем аналогично. Координаты  вектора
вектора  перпендикулярного плоскости
перпендикулярного плоскости  удовлетворяют условиям
удовлетворяют условиям  и
и  удовлетворяют числа
удовлетворяют числа  Поэтому
Поэтому 
Используем равенство  Поскольку угол
Поскольку угол  между векторами
между векторами  и
и  или совпадает с углом
или совпадает с углом  между плоскостями
между плоскостями  и
и
 или дополняет его до 180°, то
или дополняет его до 180°, то 
Находим:


Ответ: 
Для нахождения угла между прямой и плоскостью также можно использовать векторы, из которых один параллелен прямой, а другой перпендикулярен плоскости. Угол  между этими векторами связан с углом
между этими векторами связан с углом  между прямой и плоскостью равенством
между прямой и плоскостью равенством  (рис. 372).
(рис. 372).
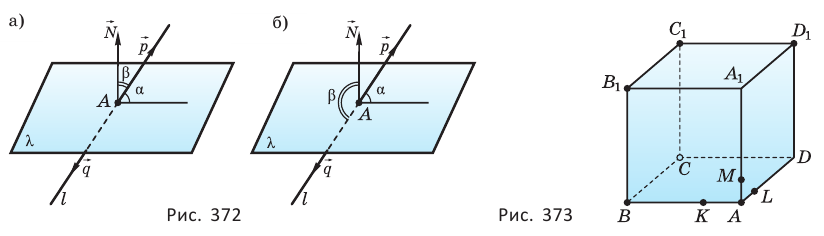
Пример №13
На рёбрах  и
и  куба
куба  отмечены точки
отмечены точки  и
и  так, что
так, что  (рис. 373). Найдём угол
(рис. 373). Найдём угол  между прямой
между прямой  и плоскостью
и плоскостью 
Решение:
Примем точку  за начало системы координат, координатные оси направим по рёбрам куба, взяв рёбра за единичные отрезки. Тогда определятся координаты нужных точек:
за начало системы координат, координатные оси направим по рёбрам куба, взяв рёбра за единичные отрезки. Тогда определятся координаты нужных точек: 
 и
и 
По теореме 3 из параграфа 13 уравнение плоскости  имеет вид
имеет вид  а поскольку координаты точек
а поскольку координаты точек  и
и  удовлетворяют уравнению
удовлетворяют уравнению  то это уравнение и есть уравнение плоскости
то это уравнение и есть уравнение плоскости  а вектор
а вектор  этой плоскости перпендикулярен.
этой плоскости перпендикулярен.
Прямой  параллелен вектор
параллелен вектор  Находим:
Находим:


и 
Ответ: 
В) В предыдущем параграфе обсуждалось использование координат для вычисления расстояния от точки до прямой. Рассмотрим решение ещё двух задач на нахождение расстояний: от точки до прямой и расстояния между скрещивающимися прямыми.
Пример №14
В правильной шестиугольной пирамиде  все рёбра основания имеют длину 3, они вдвое короче боковых рёбер. На рёбрах
все рёбра основания имеют длину 3, они вдвое короче боковых рёбер. На рёбрах  и
и  отмечены точки
отмечены точки  и
и  так, что
так, что 
 Найдём расстояние
Найдём расстояние  от точки
от точки  до прямой
до прямой 
Решение:
Пусть  — центр основания
— центр основания  Поскольку
Поскольку 
 и
и  то из прямоугольного треугольника
то из прямоугольного треугольника  находим:
находим:

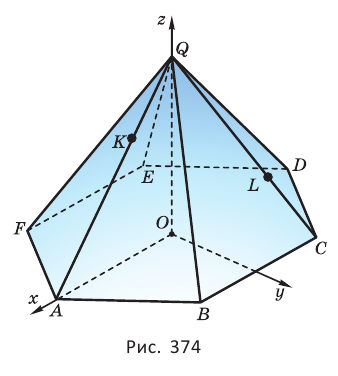
Используем прямоугольную декартову систему координат, начало которой находится в центре  основания
основания  оси абсцисс и аппликат проходят через точки
оси абсцисс и аппликат проходят через точки  и
и  соответственно и точка
соответственно и точка  имеет неотрицательные координаты (рис. 374). Точки
имеет неотрицательные координаты (рис. 374). Точки  и
и  имеют координаты
имеют координаты 
 и
и  . Тогда точки
. Тогда точки  и
и  будут иметь координаты
будут иметь координаты
 и
и  соответственно. Найдем координаты векторов
соответственно. Найдем координаты векторов  и
и  по координатам их концевых точек:
по координатам их концевых точек:

Искомое расстояние есть длина перпендикуляра, опущенного из точки  на прямую
на прямую  и равна высоте треугольника
и равна высоте треугольника  проведённой из точки
проведённой из точки  Для её нахождения можно использовать формулу
Для её нахождения можно использовать формулу  Поскольку
Поскольку 
 и
и 
то

Теперь находим:
Ответ: 
Пример №15
Измерения  и
и  прямоугольного параллелепипеда
прямоугольного параллелепипеда  равны соответственно 5, 4 и 4. Точки
равны соответственно 5, 4 и 4. Точки  и
и  на рёбрах
на рёбрах  и
и  выбраны так, что
выбраны так, что  (рис. 375). Найдём расстояние
(рис. 375). Найдём расстояние  между прямыми
между прямыми  и
и 
Решение:
Расстояние между скрещивающимися прямыми  и
и  можно найти как расстояние от какой-либо точки прямой
можно найти как расстояние от какой-либо точки прямой  до плоскости
до плоскости  проходящей через прямую
проходящей через прямую  параллельно
параллельно 
Примем точку  за начало системы координат, координатные оси направим по рёбрам параллелепипеда так, чтобы точки
за начало системы координат, координатные оси направим по рёбрам параллелепипеда так, чтобы точки  и
и  имели координаты
имели координаты  соответственно. Тогда
соответственно. Тогда 
 Чтобы записать уравнение плоскости
Чтобы записать уравнение плоскости  найдём координаты вектора
найдём координаты вектора  перпендикулярного как вектору
перпендикулярного как вектору  так и вектору
так и вектору  Поскольку
Поскольку 
 то координаты
то координаты  вектора
вектора  должны удовлетворять равенствам
должны удовлетворять равенствам  и
и  например
например 
Теперь запишем уравнение плоскости  используя координаты точки
используя координаты точки 
 Для нахождения расстояния
Для нахождения расстояния  используем теорему 4 из параграфа 13:
используем теорему 4 из параграфа 13:
Ответ: 
Векторы в пространстве
Это интересно!
Основоположниками аналитической геометрии являются знаменитые ученые Декарт и Ферма. Однако Декарт свои исследования опубликовал первым. А исследования Ферма увидели свет намного позже, после его смерти. Интересно, что подойдя к проблеме с разных сторон, они пришли к одинаковым выводам. Декарт искал уравнение исследуемой кривой, а Ферма для заданного уравнения искал соответствующую кривую.
Применение правил алгебры к геометрии привело к возникновению аналитической геометрии. В последствии аналитическая геометрия была усовершенствована основателем математического анализа Исааком Ньютоном, который писал » … я смог пойти дальше Декарта, только потому, что стоял на плечах гигантов»
Прямоугольная система координат в пространстве
Пусть мяч ударился о пол и отскочил вертикально вверх. Координаты мяча в точке на полу можно определить относительно длины и ширины комнаты двумя значениями. Однако когда мяч отскочил от пола, то его положение уже невозможно определить двумя координатами. Если положение мяча на полу определяется как  то после поднятия на высоту 2,5 м его положение в пространстве задается уже гремя координатами
то после поднятия на высоту 2,5 м его положение в пространстве задается уже гремя координатами 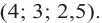
Прямоугольная система координат в пространстве. В пространстве возьмем произвольную точку  и проведем через нее три попарно перпендикулярные прямые линии. Примем точку
и проведем через нее три попарно перпендикулярные прямые линии. Примем точку  за начало координат и, выбрав на этих прямых положительное направление и единичный отрезок, назовем эти прямые координатными осями
за начало координат и, выбрав на этих прямых положительное направление и единичный отрезок, назовем эти прямые координатными осями 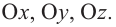 Начало координат
Начало координат  делит каждую ось на две полуоси (положительную и отрицательную). Пересекаясь попарно, три координатные оси образуют координатные плоскости. Плоскость
делит каждую ось на две полуоси (положительную и отрицательную). Пересекаясь попарно, три координатные оси образуют координатные плоскости. Плоскость  берется но горизонтали, положительное направление оси
берется но горизонтали, положительное направление оси  проводится по направлению вверх. Трехмерная система координат, образованная по данному правилу, называется еще системой правой руки. Если согнуть пальцы правой руки от положительного направления оси
проводится по направлению вверх. Трехмерная система координат, образованная по данному правилу, называется еще системой правой руки. Если согнуть пальцы правой руки от положительного направления оси  вдоль положительного направления оси
вдоль положительного направления оси  то большой палец будет направлен вдоль положительного направления оси
то большой палец будет направлен вдоль положительного направления оси 
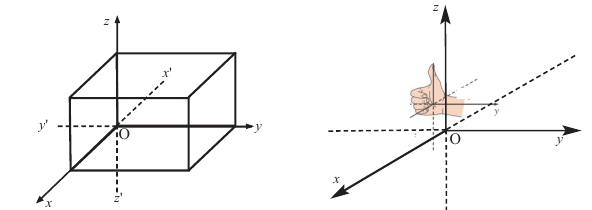
Координатные плоскости обозначаются как и 
Каждая координатная плоскость делит пространство на два полупространства и, таким образом, три координатные плоскости вместе делят пространство на восемь частей, каждая из которых называется октантом:

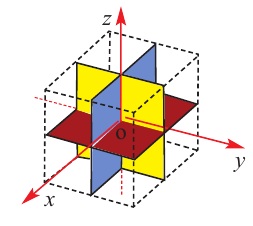
Пусть точка  произвольная точка в пространстве. Параллельно плоскостям
произвольная точка в пространстве. Параллельно плоскостям 
 и
и  через точку
через точку  проведем плоскости, которые пересекают соответствующие координатные оси в точках
проведем плоскости, которые пересекают соответствующие координатные оси в точках  и
и  Получим три плоскости:
Получим три плоскости:
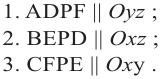
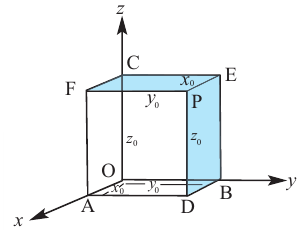
Координаты точки в пространстве
1) Плоскость, проходящая через точку  и параллельная плоскости
и параллельная плоскости  пересекает ось
пересекает ось  в точке
в точке 
2) Плоскость, проходящая через точку и параллельная плоскости  пересекает ось
пересекает ось  в точке
в точке 
3) Плоскость, проходящая через точку и параллельная плоскости  пересекает ось
пересекает ось  в точке
в точке 
Значит, каждой точке пространства соответствует упорядоченная тройка  и наоборот:
и наоборот: 
Упорядоченная тройка  в прямоугольной системе координат
в прямоугольной системе координат  называется координатами точки и декартовыми координатами. Расстояние от точки до плоскостей
называется координатами точки и декартовыми координатами. Расстояние от точки до плоскостей  и
и  соответствует абсолютным значениям координат
соответствует абсолютным значениям координат  Числа
Числа  соответственно называются абсциссой, ординатой и аппликатой точки и это записывается так:
соответственно называются абсциссой, ординатой и аппликатой точки и это записывается так: 
1) Начало координат: 
2) Точка, расположенная на оси 
Точка, расположенная на оси 
Точка, расположенная на оси 
3) Точка, расположенная на плоскости 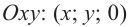
Точка, расположенная на плоскости 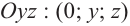
Точка, расположенная на плоскости 
Точка  в пространстве расположена в I октанте, точка
в пространстве расположена в I октанте, точка  расположена на отрицательной полуоси
расположена на отрицательной полуоси  точка
точка  расположена на плоскости
расположена на плоскости  точка
точка 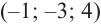 расположена в III октанте.
расположена в III октанте.
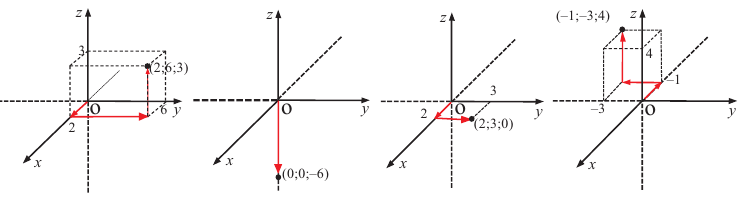
Знаки координат точки
Знак координаты точки зависит от того, в каком октанте расположена точка. В следующей таблице показаны знаки координат точек в различных октантах.
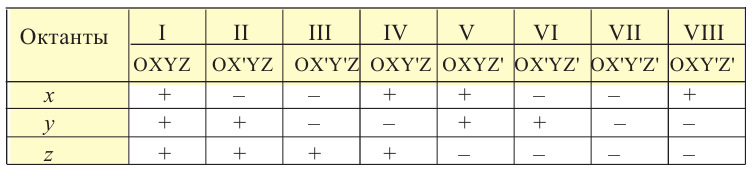
В первом октанте все знаки координат положительны, в седьмом октанте все знаки отрицательны.
Пример №16
В прямоугольной системе координат в пространстве постройте точки: 
Решение: а) для построения точки  от начала координат но оси
от начала координат но оси  в положительном направлении на расстоянии 2-х единичных отрезков отметим точку
в положительном направлении на расстоянии 2-х единичных отрезков отметим точку  От точки
От точки  вдоль положительного направления оси
вдоль положительного направления оси  и параллельно этой оси, на расстоянии 4-х единичных отрезков отметим точку
и параллельно этой оси, на расстоянии 4-х единичных отрезков отметим точку  От точки
От точки  вдоль положительного направления оси
вдоль положительного направления оси  и параллельно этой оси, на расстоянии 3-х единичных отрезков отметим точку
и параллельно этой оси, на расстоянии 3-х единичных отрезков отметим точку 
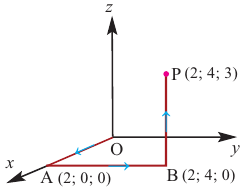
b) для построения точки  от начала координат по оси
от начала координат по оси  в отрицательном направлении на расстоянии 2-х единичных отрезков отметим точку
в отрицательном направлении на расстоянии 2-х единичных отрезков отметим точку  от точки
от точки  вдоль отрицательного направления оси
вдоль отрицательного направления оси  и параллельно этой оси, на расстоянии 2-х единичных отрезков отметим точку
и параллельно этой оси, на расстоянии 2-х единичных отрезков отметим точку  От точки
От точки  вдоль положительного направления оси
вдоль положительного направления оси  и параллельно этой оси, на расстоянии 3-х единичных отрезков отметим точку
и параллельно этой оси, на расстоянии 3-х единичных отрезков отметим точку 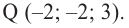
Пример №17
От точки  к осям координат проведены перпендикуляры. Запишите координаты оснований перпендикуляров, соответствующих точкам
к осям координат проведены перпендикуляры. Запишите координаты оснований перпендикуляров, соответствующих точкам  и
и 
Решение: для точки основания перпендикуляра, проведенного из точки  на ось
на ось  координаты
координаты  и
и  равны нулю. Значит, координаты точки —
равны нулю. Значит, координаты точки —  Аналогично, координаты остальных точек —
Аналогично, координаты остальных точек —  и
и 
Пример №18
От точки  к плоскостям
к плоскостям  и
и  проведены перпендикуляры. Запишите координаты точек
проведены перпендикуляры. Запишите координаты точек  и
и  которые являются основаниями перпендикуляров.
которые являются основаниями перпендикуляров.
Решение: координата  точки основания перпендикуляра, опущенного от точки
точки основания перпендикуляра, опущенного от точки  на плоскость
на плоскость  равна нулю. Значит, точка
равна нулю. Значит, точка  имеет координаты
имеет координаты  Аналогично находят координаты других точек:
Аналогично находят координаты других точек:  и
и 
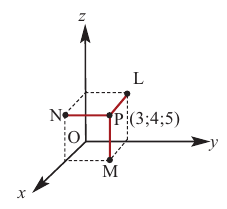
Расстояние между двумя точками в пространстве
Расстояние между точками  и
и  вычисляется но формуле
вычисляется но формуле

Доказательство. Пусть  диагональ параллелепипеда
диагональ параллелепипеда  с ребрами
с ребрами  и
и  которые параллельны координатным осям
которые параллельны координатным осям  Из прямоугольного треугольника
Из прямоугольного треугольника  прямой) имеем:
прямой) имеем:  Из прямоугольного треугольника
Из прямоугольного треугольника  прямой) имеем:
прямой) имеем: 

Учитывая, что 
получаем, 
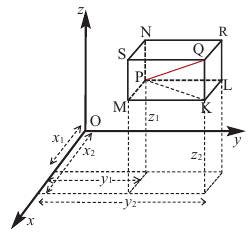
Расстояние от начала координат
В прямоугольной системе координат в пространстве расстояние от точки  начала координат до любой точки
начала координат до любой точки  вычисляется по формуле:
вычисляется по формуле:
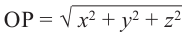
Пример №19
Точки, расположенные на одной прямой, называются коллинеарными точками.
Докажите, что точки  и
и  являются коллинеарными точками, используя формулу нахождения расстояния между двумя точками.
являются коллинеарными точками, используя формулу нахождения расстояния между двумя точками.
Решение:


Так как  то точки
то точки  и
и  расположены на одной прямой, т. е. они коллинеарны.
расположены на одной прямой, т. е. они коллинеарны.
Пример №20
Найдите координаты точки, расположенной на оси абсцисс и равноудаленной от точек  и
и 
Решение: если точка  расположена на оси абсцисс, значит ее координаты-
расположена на оси абсцисс, значит ее координаты- Так как точка равноудалена от точек
Так как точка равноудалена от точек  и
и  то
то  или
или  По формуле расстояния между двумя точками имеем:
По формуле расстояния между двумя точками имеем:

Значит, точка  расположена на оси абсцисс и равноудалена от точек
расположена на оси абсцисс и равноудалена от точек  и
и 
Координаты точки, делящей отрезок в некотором отношении
Координаты точки  делящей отрезок с концами в точках
делящей отрезок с концами в точках 
и  в отношении
в отношении  находятся как:
находятся как:

Доказательство: пусть точка  делит отрезок
делит отрезок  в заданном отношении. Через точки
в заданном отношении. Через точки  и
и  к плоскости
к плоскости  проведем перпендикуляры
проведем перпендикуляры  и
и  и через точки
и через точки  перпендикуляры
перпендикуляры  и
и  к оси
к оси  По рисунку видно, что
По рисунку видно, что  и
и 
На основе теоремы о пропорциональных отрезках имеем:
Аналогично, используя перпендикуляры к осям  и
и  можно определить координаты
можно определить координаты  и
и 

Координаты середины отрезка
Координаты середины отрезка, соединяющих точки  и
и  находятся следующим образом:
находятся следующим образом:

Координаты центра тяжести треугольника
Координаты центра тяжести треугольника (точка пересечения медиан) с вершинами в точках  и
и  находятся следующим образом:
находятся следующим образом:
 (проверьте сами)
(проверьте сами)
Пример №21
Даны точки  и
и  Найдите
Найдите
координаты точки  которая делит отрезок
которая делит отрезок  как
как 
Решение: пусть точка  имеет координаты
имеет координаты  Эта точка делит отрезок
Эта точка делит отрезок  в отношении
в отношении  По формуле нахождения координаты
По формуле нахождения координаты
точки, делящей отрезок в заданном отношении, получаем:

Пример №22
Даны координаты двух вершин треугольника  и
и  Найдите координаты третьей вершины, если центр тяжести треугольника совпадает с началом координат.
Найдите координаты третьей вершины, если центр тяжести треугольника совпадает с началом координат.
Решение: так как центр тяжести находится в начале координат, то:
Отсюда, 
Значит, третьей вершиной треугольника является точка 
Векторы в пространстве
Векторной величиной или вектором называется величина, которая определяется не только значением, но и направлением. Изображается вектор направленным отрезком. Длина отрезка, образующего вектор, называется длиной вектора или его модулем.
Вектор можно изобразить в одномерной, двухмерной и трехмерной системе координат.
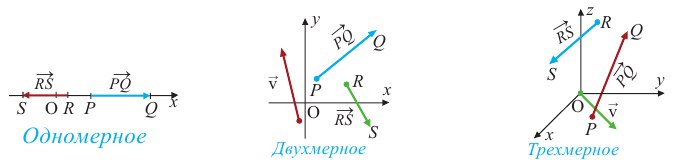
Вектор, у которого начальная и конечная точки совпадают, называется нулевым вектором. Направление нулевого вектора не определено. Местоположение любой точки (объекта) в пространстве изображается вектором, начало которого совпадает с началом координат, а конец — с данной точкой. Например, на рисунке изображен вектор, показывающий положение мяча в пространстве, который брошен на высоту 3 м на игровой площадке, длина которой равна 4 м, а ширина 2 м.
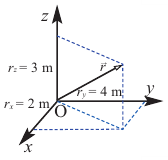
В пространстве вектор, который определяет место (положение, позицию) точки и соединяет начальную и заданную точку, называется позиционным вектором или радиус — вектором. Каждой точке пространства соответствует единственный позиционный вектор. Положение точки  в пространственной системе координат определяет вектор
в пространственной системе координат определяет вектор  — вектор, заданный компонентами.
— вектор, заданный компонентами.
Два вектора называются равными если они имеют равные модули и одинаково направлены. Равные векторы, при помощи параллельного переноса, можно расположить друг на друге. Например, на рисунке векторы  и
и  равны. Для позиционного вектора можно провести бесконечно много равных по модулю и направлению векторов. В пространстве вектор с началом в точке
равны. Для позиционного вектора можно провести бесконечно много равных по модулю и направлению векторов. В пространстве вектор с началом в точке  и концом в точке
и концом в точке 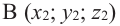 записывается компонентами как
записывается компонентами как  Соответствующие компоненты равных векторов равны и наоборот. Векторы, которые равны по модулю, но имеют противоположные направления, называются противоположными векторами.
Соответствующие компоненты равных векторов равны и наоборот. Векторы, которые равны по модулю, но имеют противоположные направления, называются противоположными векторами.
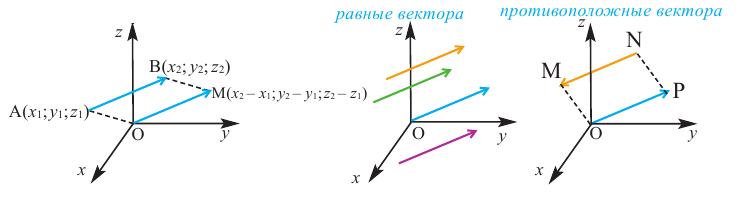
В пространстве, как и на плоскости, можно геометрически построить сумму и разность векторов, и произведение вектора на число.
Найти компоненты и длину вектора, а также выполнить действия над векторами в пространственной Декартовой системе координат можно но правилам, аналогичным для прямоугольной системы координат на плоскости.
Длина вектора
Модуль вектора можно найти, используя формулу нахождения расстояния между двумя точками.
Теорема. Если начало вектора расположено в точке  а конец в точке
а конец в точке  то длина вектора
то длина вектора  вычисляется по формуле:
вычисляется по формуле:

Следствие. Длина радиус-вектора равна  (находится по формуле нахождения расстояния от начала координат до точки).
(находится по формуле нахождения расстояния от начала координат до точки).
Сложение и вычитание векторов
Сложение и вычитание векторов: суммой (разностью) векторов  и
и  является вектор, компоненты которого равны сумме (разности) соответствующих компонент векторов, т. е. сумма (разность) векторов
является вектор, компоненты которого равны сумме (разности) соответствующих компонент векторов, т. е. сумма (разность) векторов  и
и равна вектору:
равна вектору:


Пример №23
Найдите сумму и разность векторов  и
и 
Решение:

Умножение вектора на число
Умножение вектора на число: произведение вектора  на действительное число к определяется как вектор
на действительное число к определяется как вектор  Для произведения вектора на действительное число справедливы следующие правила:
Для произведения вектора на действительное число справедливы следующие правила:
Пример №24
Для вектора  и
и  запишите компонентами вектор
запишите компонентами вектор 
Решение: 
Коллинеарные векторы
Если направленные отрезки, которыми изображены векторы, параллельны или лежат на одной прямой, то вектора называются коллинеарными. Если векторы  и
и  коллинеарны, тогда существует единственное число
коллинеарны, тогда существует единственное число  которое удовлетворяет условию
которое удовлетворяет условию  При
При  векторы сонаправленные, при
векторы сонаправленные, при  они направлены в противоположные стороны. Соответствующие координаты коллинеарных векторов пропорциональны:
они направлены в противоположные стороны. Соответствующие координаты коллинеарных векторов пропорциональны:

При  это условие запишется как:
это условие запишется как: 
Пример №25
Определите, являются ли расположенные в пространстве векторы  и
и  коллинеарными.
коллинеарными.
Решение: так как  вектор
вектор  и
и  коллинеарны и сонаправлены.
коллинеарны и сонаправлены.
Пример №26
Постройте радиус-вектор, равный вектору 
Решение: в _соответствии с правилом треугольника  Точкам
Точкам  и
и  соответствуют радиус-векторы
соответствуют радиус-векторы  и
и 
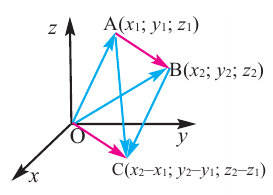
По правилу сложения векторов на плоскости  Отсюда,
Отсюда,

Пример №27
В трехмерной системе координат задан вектор  с началом в точке
с началом в точке  и концом в точке
и концом в точке  а) Найдите длину вектора
а) Найдите длину вектора  б) Запишите компонентами радиус-вектор, равный вектору
б) Запишите компонентами радиус-вектор, равный вектору 
Решение: а) 
b) Обозначим вектор, равный вектору  через
через  Тогда точке
Тогда точке 
соответствует радиус-вектор  точке
точке  соответствует
соответствует
радиус-вектор 

Так как  то
то 
Пример №28
Установите справедливость равенства  для точек
для точек  и
и 
Решение:

Из равенства соответствующих компонентов следует
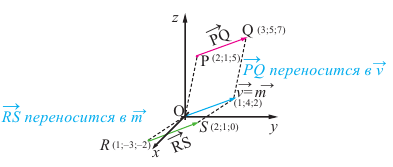
Векторы, расположенные на одной плоскости или на параллельных плоскостях, называются компланарными векторами. Например, векторы, расположенные на противолежащих гранях куба, компланарны, а векторы, направленные по трем ребрам выходящим из одной вершины, некомпланарны.
Единичный вектор — вектор, длина которого равна единице.
Для любого, отличного от нуля вектора  вектор вида
вектор вида  является единичным вектором. 1 1
является единичным вектором. 1 1
Пример №29
Для вектора  а) найдите единичный сонаправленный вектор
а) найдите единичный сонаправленный вектор  b) запишите компонентами вектор
b) запишите компонентами вектор  сонанравленный вектору
сонанравленный вектору  длина которого равна 10 единицам.
длина которого равна 10 единицам.
Решение: обозначим единичный вектор через 

Проверим, действительно ли длина этого вектора равна единице:
b) чтобы определить вектор, сонаправленный с вектором  длиной 10 единиц, надо компоненты единичного вектора, найденного в пункте а, увеличить в 10 раз.
длиной 10 единиц, надо компоненты единичного вектора, найденного в пункте а, увеличить в 10 раз.

В прямоугольной системе координат в пространстве векторы, направленные вдоль положительных направлений координатных осей  и определенные как
и определенные как  и
и  при
при
 называются орт векторами. Понятно, что векторы
называются орт векторами. Понятно, что векторы 
— некомпланарны.
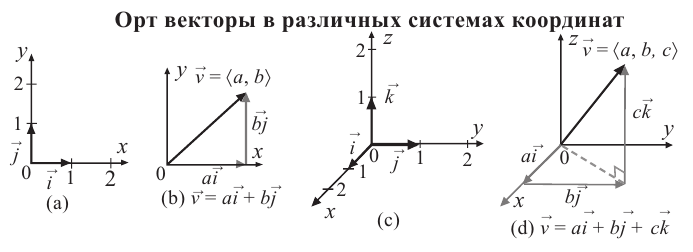
Любой позиционный вектор и на плоскости, и в пространстве, можно выразить через орт вектора. На плоскости точке  соответствует позиционный вектор
соответствует позиционный вектор  в пространстве точке
в пространстве точке  соответствует вектор
соответствует вектор  Данное выражение называется записью вектора компонентами. Здесь числа
Данное выражение называется записью вектора компонентами. Здесь числа  координаты точки
координаты точки 
Теорема. Любой вектор  можно разложить но орт векторам
можно разложить но орт векторам  единственным образом, при этом справедливо равенство
единственным образом, при этом справедливо равенство

Пример №30
Вектор  началом которого на плоскости является точка
началом которого на плоскости является точка  а концом точка
а концом точка  выразите через орт вектора.
выразите через орт вектора.
Решение: зная, что  получим
получим 
Пример №31
Запишите разложение вектора  в пространстве по орт векторам.
в пространстве по орт векторам.
Решение: по теореме разложения вектора по орт векторам имеем: 
Пример №32
а) Запишите в виде  позиционный вектор, соответствующий точке
позиционный вектор, соответствующий точке 
b) Запишите вектор  компонентами в виде
компонентами в виде 
Решение: а) начало позиционного вектора совпадает с началом координат  Таким образом вектор
Таким образом вектор  имеет вид
имеет вид 
Пример №33
Найдите сумму и разность векторов.

Решение:


Скалярное произведение двух векторов
Тележка переместилась на расстояние  по прямой под действием силы
по прямой под действием силы  направленной под углом наклона
направленной под углом наклона  Вычислите совершаемую работу: если значение силы
Вычислите совершаемую работу: если значение силы  равно
равно  то
то  На горизонтальном пути работа вертикальной компоненты силы
На горизонтальном пути работа вертикальной компоненты силы  равна нулю. Тогда работа, совершаемая горизонтальной компонентой силы
равна нулю. Тогда работа, совершаемая горизонтальной компонентой силы  на расстоянии
на расстоянии  будет:
будет:

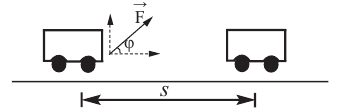
Работа, совершаемая при перемещении груза на расстояние  равна произведению длины вектора перемещения и значения компонента вектора силы
равна произведению длины вектора перемещения и значения компонента вектора силы  направленной вдоль перемещения.
направленной вдоль перемещения.
Работа является скалярной величиной, однако ее значение зависит от угла между силой, действующей на тело, и вектором перемещения.
Скалярное произведение двух векторов
Углом между любыми двумя ненулевыми векторами  и
и  называется угол
называется угол  между равными им векторами с общим началом. Ясно, что
между равными им векторами с общим началом. Ясно, что 
Скалярное произведение двух ненулевых векторов и равно произведению модулей этих векторов и косинуса угла между ними.
Скалярное произведение записывается как: 
Значит, 
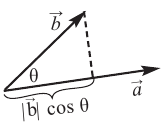
Свойство скалярного произведения
• Для любого вектора  справедливо равенство
справедливо равенство  то есть скалярный квадрат вектора равен квадрату его длины.
то есть скалярный квадрат вектора равен квадрату его длины.
Переместительное свойство скалярного произведения.
Для любых векторов и  справедливо равенство
справедливо равенство 
Свойство группировки скалярного произведения. Для любых векторов и и действительного числа  справедливо равенство
справедливо равенство

Распределительное свойство скалярного произведения:
1) Для любых векторов, и действительного числа справедливо следующее равенство  2) Для любых векторов
2) Для любых векторов  справедливо равенство
справедливо равенство
В частном случае, для скалярного произведения орт векторов получим:

Пример №34
По данным на рисунке найдите скалярное произведение векторов  и
и 
Решение: 

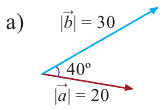

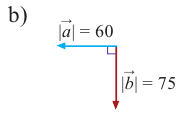
Пример №35
Упростите выражение  используя свойство скалярного произведения векторов.
используя свойство скалярного произведения векторов.
Решение:

Скалярное произведение двух векторов на координатной плоскости можно найти при помощи координат.
Пусть даны векторы  и
и  По определению скалярного произведения имеем
По определению скалярного произведения имеем
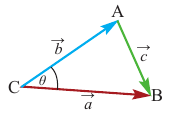
Из  получаем
получаем 
По теореме косинусов получаем 
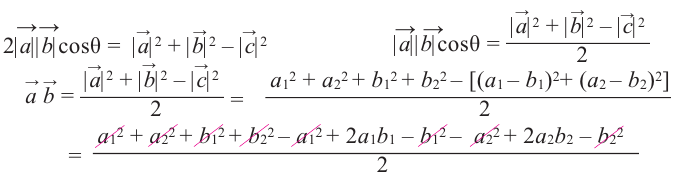
 а это значит, что
а это значит, что 
Таким образом, скалярное произведение двух векторов  и
и  равно сумме произведений соответствующих компонент.
равно сумме произведений соответствующих компонент.
Аналогичным образом, скалярное произведение двух векторов  и
и  в трехмерной, Декартовой системе координат находится как:
в трехмерной, Декартовой системе координат находится как:  .
.
Пример №36
Зная, что  найдите скалярное произведение
найдите скалярное произведение 
Решение: 
Угол между двумя векторами
Угол между двумя ненулевыми векторами находится из соотношения  , здесь
, здесь 

Пример №37
Найдите косинус угла между векторами  и
и 
Решение:

Вывод: два ненулевых вектора перпендикулярны тогда и только тогда, когда их скалярное произведение равно нулю: 
Пример №38
При каком значении  вектора
вектора и
и  взаимно перпендикулярны?
взаимно перпендикулярны?
Решение:  при
при  имеем
имеем 
Общее уравнение прямой
В системе координат на плоскости уравнение прямой имеет вид  Это уравнение называется общим уравнением прямой. Вектор, перпендикулярный прямой, называется нормальным вектором к данной прямой или нормалью. Покажем, что общее уравнение прямой с нормалью
Это уравнение называется общим уравнением прямой. Вектор, перпендикулярный прямой, называется нормальным вектором к данной прямой или нормалью. Покажем, что общее уравнение прямой с нормалью  имеет вид
имеет вид  Пусть
Пусть  заданная точка на прямой, а точка
заданная точка на прямой, а точка  произвольная точка на прямой, отличная от точки
произвольная точка на прямой, отличная от точки  а вектор
а вектор  — нормаль к прямой.
— нормаль к прямой.
Так как векторы  и
и  перпендикулярны, то
перпендикулярны, то
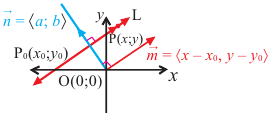
Если ввести обозначение  то получим уравнение в виде
то получим уравнение в виде  Здесь
Здесь 
Частные случаи:
•  уравнение прямой, параллельной оси абсцисс
уравнение прямой, параллельной оси абсцисс
•  уравнение прямой, параллельной оси ординат
уравнение прямой, параллельной оси ординат
•  уравнение прямой, проходящей через начало координат
уравнение прямой, проходящей через начало координат
Пример №39
Запишите уравнение прямой  проходящей через точку
проходящей через точку  нормаль к которой равна
нормаль к которой равна 
Решение: на координатной плоскости построим вектор  и изобразим графическое решение задания, проведя через точку
и изобразим графическое решение задания, проведя через точку  прямую перпендикулярную нормали. Теперь запишем требуемое уравнение.
прямую перпендикулярную нормали. Теперь запишем требуемое уравнение.
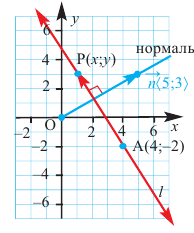
Способ 1.
Пусть точка  является точкой, расположенной на прямой
является точкой, расположенной на прямой  и отличной от точки
и отличной от точки  Тогда вектор
Тогда вектор  коллинеарен прямой
коллинеарен прямой  и
и  Так как вектора
Так как вектора  и
и  перпендикулярны, то
перпендикулярны, то  Тогда получим:
Тогда получим: 
Таким образом, 
Способ 2.
Зная нормаль  уравнение
уравнение  можно записать следующим образом:
можно записать следующим образом:  Так как точка
Так как точка  должна находится на прямой, то
должна находится на прямой, то  и уравнение будет
и уравнение будет 
Пример №40
Найдите угол между прямыми, заданными уравнениями  и
и 
Решение: угол между прямыми можно найти как угол между их нормалями.
Для угла  между нормальных векторов
между нормальных векторов  и
и  имеем:
имеем: 
Отсюда 
Пример №41
Найдите расстояние от точки  до прямой
до прямой 
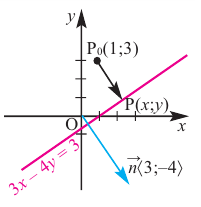
Решение: пусть точка  является основанием перпендикуляра, проведенного к прямой от точки
является основанием перпендикуляра, проведенного к прямой от точки 
Так как векторы  и
и  коллинеарны, го существует такое число
коллинеарны, го существует такое число  что
что  или
или  Из равенства соответствующих компонент получим
Из равенства соответствующих компонент получим  Координаты
Координаты  и
и  точки
точки  должны удовлетворять уравнению
должны удовлетворять уравнению 

Отсюда  Тогда
Тогда 
Уравнение плоскости
Исследование. Какому множеству точек соответствует одно и тоже уравнение, например  в одномерной, двухмерной и трехмерной системах координат?
в одномерной, двухмерной и трехмерной системах координат?
1. В одномерной системе координат, т.е. на числовой оси, уравнению  соответствует одна точка.
соответствует одна точка.
2. В двухмерной системе координат уравнению  или
или  удовлетворяют все точки с координатами
удовлетворяют все точки с координатами  Множеством таких точек является прямая, параллельная оси
Множеством таких точек является прямая, параллельная оси 
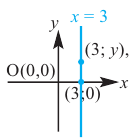
3. В трехмерной системе координат уравнению  или
или  удовлетворяет множество точек
удовлетворяет множество точек  Множеством таких точек является плоскость, параллельная плоскости Аналогично, уравнениям
Множеством таких точек является плоскость, параллельная плоскости Аналогично, уравнениям  и
и  соответствуют плоскости, параллельные плоскостям
соответствуют плоскости, параллельные плоскостям  и
и 
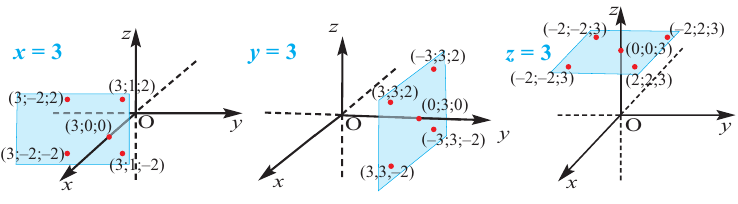
4. В трехмерной системе координат представьте множество точек, удовлетворяющих уравнениям  и
и 
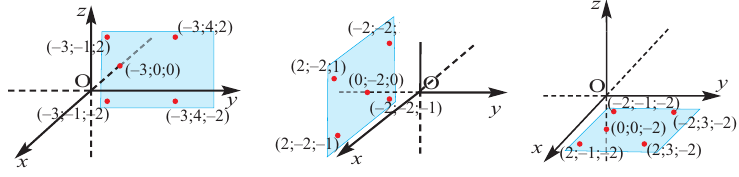 5. Сопоставьте координаты точек, данных на плоскости, с уравнениями
5. Сопоставьте координаты точек, данных на плоскости, с уравнениями  и
и  Представьте плоскости.
Представьте плоскости.
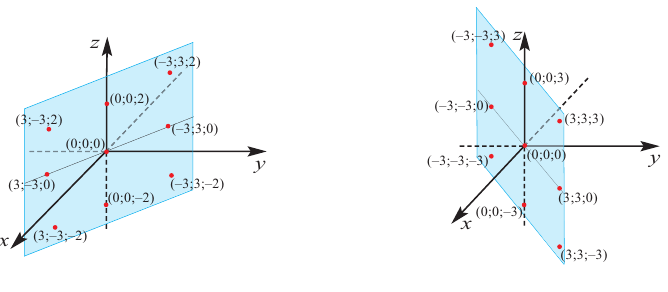
Уравнение прямой в двухмерной системе координат имеет вид 
Например, уравнение  определяет прямую, проходящую через точки
определяет прямую, проходящую через точки 
 и
и 
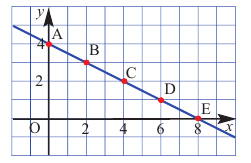
В трехмерной системе координат мы можем написать это уравнение в виде:  Так как коэффициент
Так как коэффициент  равен нулю, то аппликата
равен нулю, то аппликата  может получать любые значения. Т. е. в трехмерной системе координат для любого
может получать любые значения. Т. е. в трехмерной системе координат для любого  координаты точек
координаты точек  и
и  удовлетворяет уравнению
удовлетворяет уравнению  Если отметить все такие точки в трехмерной системе координат, то получим плоскость, параллельную оси
Если отметить все такие точки в трехмерной системе координат, то получим плоскость, параллельную оси  В общем, уравнение плоскости в трехмерной системе координат имеет вид
В общем, уравнение плоскости в трехмерной системе координат имеет вид 
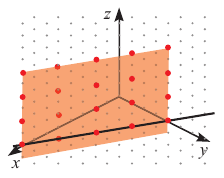
Плоскость может быть определена различными способами.
- тремя неколлинеарными точками
- прямой и точкой, не принадлежащей этой прямой
- двумя пересекающимися прямыми
- двумя параллельными прямыми
- точкой и перпендикуляром в этой точке в заданном направлении
Используя последний способ, которым можно задать плоскость, покажем, что уравнение плоскости имеет вид  Вектор, перпендикулярный к плоскости называется ее нормалью. Пусть, дана плоскость
Вектор, перпендикулярный к плоскости называется ее нормалью. Пусть, дана плоскость  точка
точка  расположенная на этой плоскости и нормаль
расположенная на этой плоскости и нормаль  к этой плоскости. Выберем на этой плоскости какую-либо другую точку
к этой плоскости. Выберем на этой плоскости какую-либо другую точку  и соединим точки
и соединим точки  и
и  Прямая, перпендикулярная плоскости, перпендикулярна каждой прямой, лежащей в данной плоскости. Значит
Прямая, перпендикулярная плоскости, перпендикулярна каждой прямой, лежащей в данной плоскости. Значит

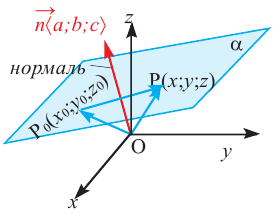
А это значит, что  Учитывая, что
Учитывая, что  и
и  имеем:
имеем:

Обозначим  тогда уравнение плоскости будет иметь вид:
тогда уравнение плоскости будет иметь вид: 
Внимание! Три коэффициента при переменных в уравнении плоскости являются компонентами нормали и 
Пример №42
Плоскость с нормалью  проходит через точку
проходит через точку  Запишите уравнение этой плоскости.
Запишите уравнение этой плоскости.
Решение: задание можно выполнить двумя способами.
1-ый способ. Возьмем произвольную точку  на плоскости и запишем компонентами вектор с началом в точке
на плоскости и запишем компонентами вектор с началом в точке  и концом в точке
и концом в точке  Вектор будет иметь вид
Вектор будет иметь вид  Так как нормальный вектор имеет вид
Так как нормальный вектор имеет вид  то
то  или справедливо следующее:
или справедливо следующее:
 Отсюда
Отсюда
Умножим обе части уравнения на  Тогда уравнение данной плоскости будет иметь вид
Тогда уравнение данной плоскости будет иметь вид 
2-ой способ. Известно, что уравнение плоскости имеет вид  а нормаль к плоскости имеет вид
а нормаль к плоскости имеет вид  Значит, коэффициенты
Значит, коэффициенты  известны. Из вектора нормали
известны. Из вектора нормали  имеем:
имеем:  Записав координаты точки
Записав координаты точки  принадлежащей плоскости, в уравнение
принадлежащей плоскости, в уравнение  найдем переменную
найдем переменную 
 и уравнение плоскости будет иметь вид:
и уравнение плоскости будет иметь вид:  или
или 
Пример №43
Дано уравнение плоскости 
a) Определите, принадлежат ли точки  плоскости.
плоскости.
b) Определите координаты точки пересечения плоскости с осями 
c) Запишите координаты какой-либо другой точки, принадлежащей данной плоскости.
Решение:
а) Проверка:

Принадлежит плоскости
Принадлежит плоскости
Не принадлежит плоскости
b) Координаты точек пересечения с осями 
в точке пересечения с осью  координаты
координаты  и
и  равны нулю
равны нулю
в точке пересечения с осью координаты и равны нулю

в точке пересечения с осью координаты и равны нулю
c) Для определения координаты другой точки на заданной плоскости задайте любые значения двум переменным и найдите третью координату.
Например, при  значение
значение  находят гак:
находят гак:  Значит, точка
Значит, точка  принадлежит данной плоскости.
принадлежит данной плоскости.
- Заказать решение задач по высшей математике
Пример №44
Найдите расстояние от точки  до плоскости
до плоскости 
Решение: пусть точка  является основанием перпендикуляра, проведенного от точки
является основанием перпендикуляра, проведенного от точки  Так как векторы
Так как векторы  и
и  коллинеарны, то существует такое число
коллинеарны, то существует такое число  что
что  или
или  Из равенства соответствующих компонент получим
Из равенства соответствующих компонент получим  Координаты
Координаты 
 точки
точки  удовлетворяют уравнению:
удовлетворяют уравнению:

Отсюда  Тогда
Тогда 
Это говорит о том, что расстояние от заданной точки  до плоскости равно 3 единицам.
до плоскости равно 3 единицам.
Взаимное расположение плоскостей
Плоскости  и
и  перпендикулярны тогда и только тогда, когда перпендикулярны их нормали:
перпендикулярны тогда и только тогда, когда перпендикулярны их нормали: 
Плоскости и параллельны тогда и только тогда, когда параллельны их нормали: 
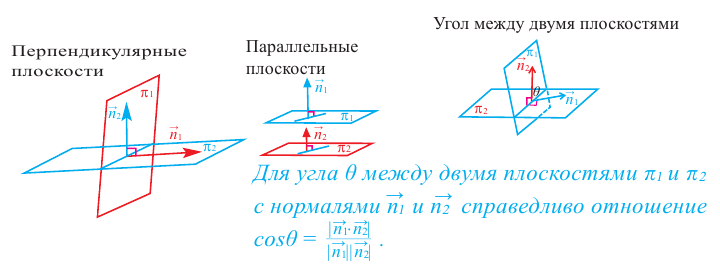
Пример №45
Определение параллельности или перпендикулярности плоскостей но уравнению.
a) плоскость  задана уравнением
задана уравнением  а плоскость
а плоскость  задана уравнением
задана уравнением  Обоснуйте, что данные плоскости перпендикулярны.
Обоснуйте, что данные плоскости перпендикулярны.
b) плоскость  задана уравнением
задана уравнением  а плоскость
а плоскость  задана уравнением
задана уравнением  Обоснуйте, что данные плоскости параллельны.
Обоснуйте, что данные плоскости параллельны.
Решение: для того чтобы плоскости и были перпендикулярны, скалярное произведение нормалей  и
и  плоскостей и должно равняться нулю.
плоскостей и должно равняться нулю.

Значит, плоскости и перпендикулярны: 
Нормали плоскостей и равны:  Если для данных плоскостей постоянная
Если для данных плоскостей постоянная  имеет различное значение, то это значит, что плоскости не лежат друг на друге, т. е. они параллельны.
имеет различное значение, то это значит, что плоскости не лежат друг на друге, т. е. они параллельны.
Уравнение сферы
Определение. Сферой называется множество всех точек, расположенных на расстоянии  от заданной точки
от заданной точки  Точка
Точка  называется центром сферы,
называется центром сферы,  радиусом сферы.
радиусом сферы.
Если точка  — произвольная точка сферы, то по формуле расстояния между двумя точками имеем:
— произвольная точка сферы, то по формуле расстояния между двумя точками имеем:

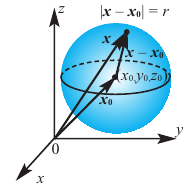
Это уравнение сферы с центром в точке  и радиусом
и радиусом 
Если центр сферы находится в начале координат, то уравнение сферы радиуса  имеет вид:
имеет вид:

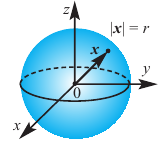
Как видно из рисунка, пересечение этой сферы с координатной плоскостью  является ее большой окружностью.
является ее большой окружностью.
Пример №46
Запишите уравнение сферы, радиус которой равен г а центр расположен в точке 
Решение: 
Пример №47
Представьте фигуру, которая получается при пересечении сферы  с плоскостью
с плоскостью 
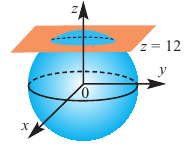
Решение: радиус сферы 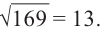 Учитывая в уравнении сферы, что
Учитывая в уравнении сферы, что  получим:
получим:  Пересечение плоскости z = 12 и данной сферы является окружность с центром в точке (0; 0; 12) и радиусом г = 5.
Пересечение плоскости z = 12 и данной сферы является окружность с центром в точке (0; 0; 12) и радиусом г = 5.
Плоскость, имеющая со сферой только одну общую точку, называется плоскостью, касательной к сфере.
Например, плоскость  касается сферы
касается сферы  в точке
в точке 
Плоскость, касательная к сфере, в точке касания перпендикулярна радиусу сферы.
Преобразования на плоскости и в пространстве
Ремесленники и художники создают узоры, заполняя некоторую площадь без пробела рисунком при помощи преобразований (параллельный перенос, поворот, отображение) или увеличения или уменьшения этого рисунка (гомотетия).


Это знать интересно. Великий голландский художник Эшер, объединив такие разделы математики как симметрия, комбинаторика, стереометрия и топология, создал динамические рисунки, заполняя плоскости цветовыми оттенками. Не имея специального математического образования, Эшер создавал свои произведения, опираясь на интуицию и визуальные представления. Ряду работ, построенных на параллельном переносе, он дал название «Правильное движение плоскости».
https://en.wikipedia.org/wiki/M._C._Escher
Если каждой точке  фигуры
фигуры  в пространстве, по определенному правилу, ставится в соответствие единственная точка
в пространстве, по определенному правилу, ставится в соответствие единственная точка  то это называется преобразованием фигуры
то это называется преобразованием фигуры  в пространстве. Преобразование, сохраняющее расстояние между точками, называется движением. Движение преобразовывает плоскость в плоскость, прямую в прямую, отрезок в отрезок, а угол — в конгруэнтный ему угол. Значит, движение преобразовывает фигуру в конгруэнтную себе фигуру. Известно, что в двухмерной системе координат за преобразование каждой точки
в пространстве. Преобразование, сохраняющее расстояние между точками, называется движением. Движение преобразовывает плоскость в плоскость, прямую в прямую, отрезок в отрезок, а угол — в конгруэнтный ему угол. Значит, движение преобразовывает фигуру в конгруэнтную себе фигуру. Известно, что в двухмерной системе координат за преобразование каждой точки  в точку
в точку  т. е. за параллельный перенос отвечает вектор
т. е. за параллельный перенос отвечает вектор  Аналогичным образом, в пространстве при параллельном переносе координаты каждой точки изменяются так:
Аналогичным образом, в пространстве при параллельном переносе координаты каждой точки изменяются так: 
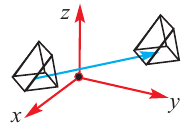
Параллельный перенос является движением. Каждому параллельному переносу соответствует один вектор. Справедливо и обратное.
Пример №48
В какую точку переходит точка  при параллельном переносе на вектор
при параллельном переносе на вектор 
Решение: по определению при данном преобразовании, координаты точки  преобразуются в координаты точки
преобразуются в координаты точки  следующим образом:
следующим образом:  Т. е. при этом параллельном переносе точка
Т. е. при этом параллельном переносе точка  преобразуется в точку
преобразуется в точку 
Симметрия. В пространстве симметрии относительно точки и прямой дается такое же определение как и на плоскости. В пространстве также рассматривается симметрия относительно плоскости.
Для точки  пространства
пространства
Пример №49
Найдите точку, симметричную точке  относительно плоскости
относительно плоскости 
Решение: точка  симметричная точке
симметричная точке  относительно плоскости
относительно плоскости  расположена на прямой, перпендикулярной как плоскости
расположена на прямой, перпендикулярной как плоскости  так и плоскости
так и плоскости  Поэтому абсциссы и ординаты точек равны:
Поэтому абсциссы и ординаты точек равны:  Координаты точки
Координаты точки  можно найти из отношения
можно найти из отношения  Таким образом, это точка
Таким образом, это точка 
Поворот. Поворотом фигуры в пространстве вокруг прямой  на угол
на угол  называется такое преобразование, при котором каждая плоскость, перпендикулярная прямой
называется такое преобразование, при котором каждая плоскость, перпендикулярная прямой  поворачивается в одном направлении на угол
поворачивается в одном направлении на угол  вокруг точек пересечения прямой
вокруг точек пересечения прямой  с плоскостью. Прямая
с плоскостью. Прямая  называется осью симметрии, угол
называется осью симметрии, угол  называется углом поворота.
называется углом поворота.
Ниже на рисунках представлены примеры различных изображений поворота куба вокруг оси  в направлении по часовой стрелке на угол 90°, 180°, 270°.
в направлении по часовой стрелке на угол 90°, 180°, 270°.
Гомотетия
Аналогичным образом в пространстве вводится понятие преобразования подобия. Если при преобразовании фигуры расстояние между двумя точками  и
и  изменяется в
изменяется в  раз, то такое преобразование называется преобразованием подобия. Здесь число к называется коэффициентом подобия.
раз, то такое преобразование называется преобразованием подобия. Здесь число к называется коэффициентом подобия.
Если для любой точки фигуры  при преобразовании ее в точку
при преобразовании ее в точку  выполняется равенство
выполняется равенство  то это преобразование называется гомотетией с центром в точке
то это преобразование называется гомотетией с центром в точке  и с коэффициентом
и с коэффициентом  Гомотетия — это преобразование подобия. В частном случае, при
Гомотетия — это преобразование подобия. В частном случае, при  получаем центральную симметрию относительно
получаем центральную симметрию относительно  при
при  — тождественное преобразование.
— тождественное преобразование.
Пример №50
Пусть дана сфера с центром в точке  и радиусом 2. Запишите уравнение сферы, полученной гомотетией с центром в начале координат и коэффициентом
и радиусом 2. Запишите уравнение сферы, полученной гомотетией с центром в начале координат и коэффициентом 
Решение: позиционный вектор, соответствующий точке  равен
равен  Пусть позиционный вектор, соответствующий точке
Пусть позиционный вектор, соответствующий точке  будет
будет  Тогда, по определению,
Тогда, по определению,  или
или  Тогда
Тогда  Т. е. центром данной сферы будет точка
Т. е. центром данной сферы будет точка  Зная, что радиус сферы равен
Зная, что радиус сферы равен  получим уравнение сферы
получим уравнение сферы 
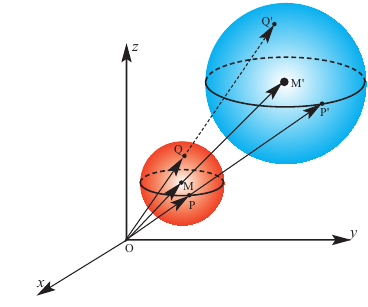
Предел
Это интересно!
Предел (лимит) от латинского слова «limes», что означает цель.
Понятие предела независимо друг от друга было введено английским математиком Исааком Ньютоном (1642-1727) и немецким математиком Готфридом Лейбницом (1646-1716). Однако ни Ни Ныотон, ни Лейбниц не смогли полностью объяснить вводимые ими понятия. Точное определение предела было дано французским математиком Коши. А работы немецкого ученого » Вейерштрасса наконец завершили создание этой серьезной теории.
Координаты и векторы в пространстве
В этом параграфе вы ознакомитесь с прямоугольной системой координат в пространстве, научитесь находить координаты точек в пространстве, длину отрезка и координаты его середины. Вы обобщите и расширите свои знания о векторах.
Декартовы координаты точки в пространстве
В предыдущих классах вы ознакомились с прямоугольной (декартовой) системой координат на плоскости — это две перпендикулярные координатные прямые с общим началом отсчета (рис. 38.1).
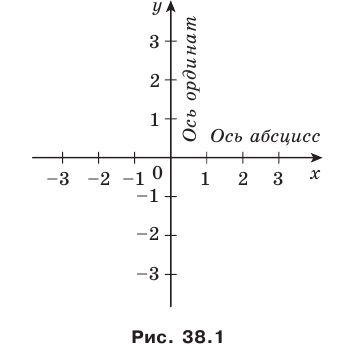
Систему координат можно ввести и в пространстве. Прямоугольной (декартовой) системой координат в пространстве называют три попарно перпендикулярные координатные прямые с общим началом отсчета (рис. 38.2). Точку, в которой пересекаются три координатные прямые, обозначают буквой О. Ее называют началом координат. Координатные прямые обозначают буквами  их соответственно называют осью абсцисс, осью ординат и осью аппликат.
их соответственно называют осью абсцисс, осью ординат и осью аппликат.
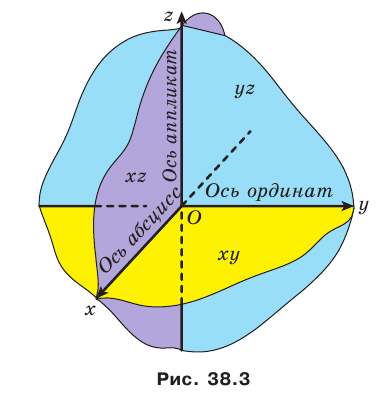
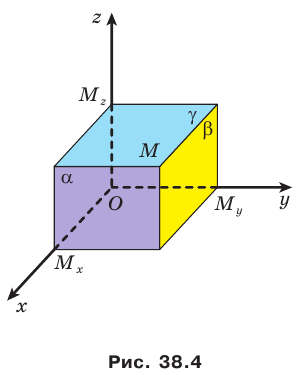
Плоскости, проходящие через пары координатных прямых  и
и  называют координатными плоскостями, их соответственно обозначают
называют координатными плоскостями, их соответственно обозначают  (рис. 38.3).
(рис. 38.3).
Пространство, в котором задана система координат, называют координатным пространством. Если оси координат обозначены буквами  то координатное пространство обозначают
то координатное пространство обозначают  Из курса планиметрии вы знаете, что каждой точке М координатной плоскости
Из курса планиметрии вы знаете, что каждой точке М координатной плоскости  ставится в соответствие упорядоченная пара чисел
ставится в соответствие упорядоченная пара чисел  , которые называют координатами точки М. Записыва ют:
, которые называют координатами точки М. Записыва ют:
Аналогично каждой точке М координатного пространства ставится в соответствие упорядоченная тройка чисел  , определяемая следующим образом. Проведем через точку М три плоскости
, определяемая следующим образом. Проведем через точку М три плоскости  перпендикулярно осям
перпендикулярно осям  соответственно. Точки пересечения этих плоскостей с координатными осями обозначим
соответственно. Точки пересечения этих плоскостей с координатными осями обозначим  (рис. 38.4). Координату точки
(рис. 38.4). Координату точки  на оси
на оси  называют абсциссой точки М и обозначают буквой
называют абсциссой точки М и обозначают буквой  Координату точки
Координату точки  на оси у называют ординатой точки М и обозначают буквой
на оси у называют ординатой точки М и обозначают буквой  . Координату точки
. Координату точки  , на оси
, на оси  называют аппликатой точки М и обозначают буквой
называют аппликатой точки М и обозначают буквой  .
.
Полученную упорядоченную тройку чисел  называют координатами точки М в пространстве. Записывают:
называют координатами точки М в пространстве. Записывают:  . Если точка М имеет координаты
. Если точка М имеет координаты  , то числа
, то числа 
 равны расстояниям от точки М до координатных плоскостей
равны расстояниям от точки М до координатных плоскостей  . Используя этот факт, можно доказать, что, например точки с координатами
. Используя этот факт, можно доказать, что, например точки с координатами  и
и  лежат на прямой, перпендикулярной плоскости
лежат на прямой, перпендикулярной плоскости  и равноудалены от этой плоскости (рис. 38.5). В этом случае говорят, что точки М и N симметричны относительно плоскости
и равноудалены от этой плоскости (рис. 38.5). В этом случае говорят, что точки М и N симметричны относительно плоскости 
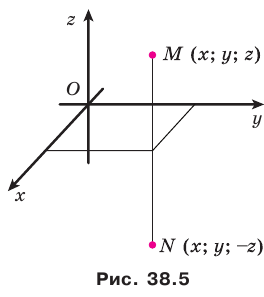
Если точка принадлежит координатной плоскости или координатной оси, то некоторые ее координаты равны нулю. Например, точка  принадлежит координатной плоскости
принадлежит координатной плоскости  , а точка
, а точка  — оси аппликат. Справедливы следующие утверждения.
— оси аппликат. Справедливы следующие утверждения.
Теорема 38.1. Расстояние между двумя точками  и
и  можно найти по формуле
можно найти по формуле

Теорема 38.2. Каждая координата середины отрезка равна полусумме соответствующих координат его концов, то есть серединой отрезка с концами в точках  является точка
является точка 
Доказательства теорем 38.1 и 38.2 аналогичны тому, как были доказаны соответствующие теоремы в курсе планиметрии. Например, серединой отрезка с концами в точках  и
и  является начало координат — точка
является начало координат — точка  .
.
В таком случае говорят, что точки А и В симметричны относительно начала координат.
Векторы в пространстве
В курсе планиметрии вы изучали векторы на плоскости. Теперь вы начинаете изучать векторы в пространстве. Многие понятия и свойства, связанные с векторами на плоскости, можно почти дословно отнести к векторам в пространстве. Доказательства такого рода утверждений о векторах в пространстве аналогичны доказательствам соответствующих утверждений о векторах на плоскости.
Рассмотрим отрезок АВ. Если мы договоримся точку А считать началом отрезка, а точку В — его концом, то такой отрезок будет характеризоваться не только длиной, но и направлением от точки А до точки В. Если указано, какая точка является началом отрезка, а какая точка — его концом, то такой отрезок называют направленным отрезком или вектором.
Вектор с началом в точке А и концом в точке В обозначают так:  (читают: «вектор АВ»). Для обозначения векторов также используют строчные буквы латинского алфавита со стрелкой сверху. На рисунке 39.1 изображены векторы
(читают: «вектор АВ»). Для обозначения векторов также используют строчные буквы латинского алфавита со стрелкой сверху. На рисунке 39.1 изображены векторы
В отличие от отрезка, концы которого — различные точки, у вектора начало и конец могут совпадать.
Договорились называть вектор, начало и конец которого — одна и та же точка, нулевым вектором или нуль-вектором и обозначать  . Модулем вектора
. Модулем вектора  называют длину отрезка АВ. Обозначают:
называют длину отрезка АВ. Обозначают:  . Модуль вектора
. Модуль вектора  обозначают так:
обозначают так:  . Считают, что модуль нулевого вектора равен нулю. Записывают:
. Считают, что модуль нулевого вектора равен нулю. Записывают: 
Определение. Два ненулевых вектора называют коллинеарными, если они лежат на параллельных прямых или на одной прямой. Нулевой вектор считают коллинеарным любому вектору.
На рисунке 39.2 изображена четырехугольная призма 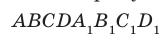 . Векторы
. Векторы  и
и  являются коллинеарными.
являются коллинеарными.
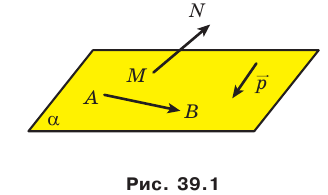
Записывают: 
Ненулевые коллинеарные векторы бывают сонаправленными и противоположно направленными. Например, на рисунке 39.2 векторы  , сонаправлены. Записывают:
, сонаправлены. Записывают:  . Векторы
. Векторы  противоположно направлены. Записывают:
противоположно направлены. Записывают:  .
.
Определение. Два ненулевых вектора называют равны ми, если их модули равны и они сонаправлены. Любые два нулевых вектора равны. На рисунке 39.2 
Часто, говоря о векторах, мы не конкретизируем, какая точка является началом вектора. Так, на рисунке 39.3,  изображен вектор
изображен вектор  . На рисунке 39.3,
. На рисунке 39.3,  изображены векторы, равные вектору
изображены векторы, равные вектору  . Каждый из них также принято называть вектором
. Каждый из них также принято называть вектором  .
.
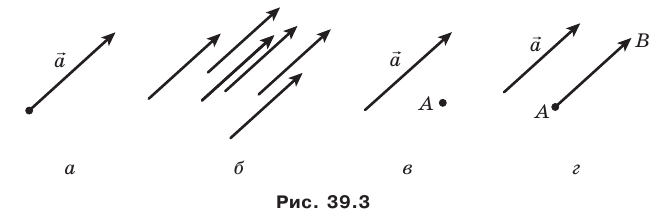
На рисунке 39.3,  изображены вектор
изображены вектор  и точка А. Построим вектор
и точка А. Построим вектор  , равный вектору
, равный вектору  . В таком случае говорят, что вектор
. В таком случае говорят, что вектор  отложен от точки А (рис. 39.3,
отложен от точки А (рис. 39.3,  ).
).
Рассмотрим в координатном пространстве вектор  . От начала координат отложим вектор
. От начала координат отложим вектор  , равный вектору
, равный вектору  (рис. 39.4). Координатами вектора
(рис. 39.4). Координатами вектора  называют координаты точки А . Запись
называют координаты точки А . Запись  означает, что вектор
означает, что вектор  имеет координаты
имеет координаты 
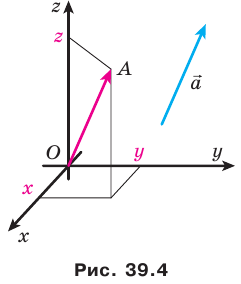
Равные векторы имеют равные соответствующие координаты, и наоборот, если соответствующие координаты векторов равны, то равны и сами векторы.
Теорем а 39.1. Если точки  и
и  — соответственно начало и конец вектора
— соответственно начало и конец вектора  , то числа
, то числа  и
и  равны соответственно первой, второй и третьей координатам вектора
равны соответственно первой, второй и третьей координатам вектора  . Из формулы расстояния между двумя точками следует, что если вектор
. Из формулы расстояния между двумя точками следует, что если вектор  имеет координаты
имеет координаты  , то
, то
Сложение и вычитание векторов
Пусть в пространстве даны векторы  . Отложим от произвольной точки А пространства вектор
. Отложим от произвольной точки А пространства вектор  , равный вектору
, равный вектору  .
.
Далее от точки В отложим вектор  , равный вектору
, равный вектору  . Век тор
. Век тор  называют суммой векторов
называют суммой векторов  (рис. 40.1) и записывают:
(рис. 40.1) и записывают:  Описанный алгоритм сложения двух векторов называют правилом треугольника.
Описанный алгоритм сложения двух векторов называют правилом треугольника.
Можно показать, что сумма  не зависит от выбора точки А. Заметим, что для любых трех точек А, В и С выполняется равенство
не зависит от выбора точки А. Заметим, что для любых трех точек А, В и С выполняется равенство  Оно выражает правило треугольника.
Оно выражает правило треугольника.
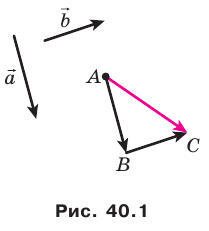
Свойства сложения векторов аналогичны свойствам сложения чисел. Для любых векторов 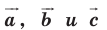 выполняются равенства:
выполняются равенства:
Сумму трех и большего количества векторов находят так: вначале складывают первый и второй векторы, потом к полученной сумме прибавляют третий вектор и т. д. Например,  Для тетраэдра DABC, изображенного на рисунке 40.2, можно записать:
Для тетраэдра DABC, изображенного на рисунке 40.2, можно записать: 
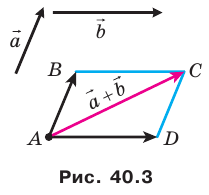
Для сложения двух неколлинеарных векторов  удобно пользоваться правилом параллелограмма.
удобно пользоваться правилом параллелограмма.
Отложим от произвольной точки А вектор  , равный вектору
, равный вектору  , и вектор
, и вектор  , равный вектору
, равный вектору  (рис. 40.3). Построим параллелограмм ABCD. Тогда искомая сумма
(рис. 40.3). Построим параллелограмм ABCD. Тогда искомая сумма  равна вектору
равна вектору  .
.
Рассмотрим векторы 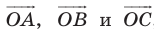 , не лежащие в одной плоскости (рис. 40.4). Найдем сумму этих векторов.
, не лежащие в одной плоскости (рис. 40.4). Найдем сумму этих векторов.
Построим параллелепипед так, чтобы отрезки ОА, ОВ и ОС были его ребрами (рис. 40.5). Отрезок OD является диагональю этого параллелепипеда. Докажем, что  Так как четырехугольник
Так как четырехугольник  — параллелограмм, то
— параллелограмм, то  . Имеем:
. Имеем:  . Поскольку четырехугольник
. Поскольку четырехугольник  — параллелограмм, то
— параллелограмм, то 
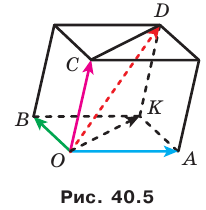
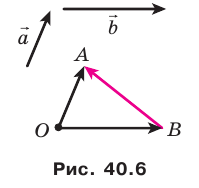
Описанный способ сложения трех векторов, отложенных от одной точки и не лежащих в одной плоскости, называют правилом параллелепипеда.
Определение. Разностью векторов  называют такой вектор
называют такой вектор  , сумма которого с вектором
, сумма которого с вектором  равна вектору
равна вектору  .
.
Записывают:  .
.
Покажем, как построить вектор, равный разности векторов  и
и  . От произвольной точки О отложим векторы
. От произвольной точки О отложим векторы  , соответственно равные векторам
, соответственно равные векторам  (рис. 40.6). Тогда
(рис. 40.6). Тогда  По определению разности двух векторов
По определению разности двух векторов  , то есть
, то есть 
 , следовательно, вектор
, следовательно, вектор  равен разности векторов
равен разности векторов  .
.
Отметим, что для любых трех точек О, А и В выполняется равенство  Оно выражает правило нахождения разности двух векторов, отложенных от одной точки.
Оно выражает правило нахождения разности двух векторов, отложенных от одной точки.
Теорема 40.1. Если координаты векторов  равны соответственно
равны соответственно  , то координаты вектора
, то координаты вектора  равны
равны  , а координаты вектора
, а координаты вектора  равны
равны  .
.
Умножение вектора на число
Определение. Произведением ненулевого вектора  и чис ла
и чис ла  , отличного от нуля, называют такой вектор
, отличного от нуля, называют такой вектор  , что:
, что:
1)
2) если  если
если 
Записывают:  Если
Если  или
или  , то считают, что
, то считают, что  На рисунке 41.1 изображен параллелепипед
На рисунке 41.1 изображен параллелепипед  . Имеем:
. Имеем:  ,
,  Из определения следует, что
Из определения следует, что
 .
.
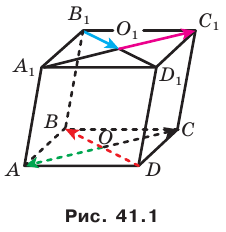
Теорема 41.1. Для любых векторов  выполняется равенство
выполняется равенство 
Эта теорема позволяет свести вычитание векторов к сложению: чтобы из вектора  вычесть вектор
вычесть вектор  , можно к вектору
, можно к вектору  прибавить вектор
прибавить вектор . Произведение
. Произведение  обозначают
обозначают  и называют вектором, противоположным вектору
и называют вектором, противоположным вектору  . Например, записывают:
. Например, записывают:
 Из определения умножения вектора на число следует, что если
Из определения умножения вектора на число следует, что если , то векторы
, то векторы  коллинеарны. Следовательно, из равенства
коллинеарны. Следовательно, из равенства 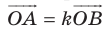 получаем, что точки О, А и В лежат на одной прямой.
получаем, что точки О, А и В лежат на одной прямой.
Теорема 41.2. Если векторы  коллинеарны и
коллинеарны и  то существует такое число
то существует такое число  , что
, что 
Теорема 41.3. Если координаты вектора  равны
равны  , то координаты вектора
, то координаты вектора  равны
равны  .
.
Умножение вектора на число обладает следующими свойствами.
Для любых чисел 
 и для любых векторов
и для любых векторов  выполняются равенства:
выполняются равенства:
Эти свойства позволяют преобразовывать выражения, содержащие сумму векторов, их разность и произведение вектора на число, аналогично тому, как мы преобразовываем алгебраические выражения. Например, 
Скалярное произведение векторов
Пусть  — два ненулевых и несонаправленных вектора. От произвольной точки О отложим векторы
— два ненулевых и несонаправленных вектора. От произвольной точки О отложим векторы  равные соответственно векторам
равные соответственно векторам  (рис. 42.1). Величину угла АОВ будем называть углом между векторами
(рис. 42.1). Величину угла АОВ будем называть углом между векторами 
Угол между векторами  обозначают так:
обозначают так:  . Очевидно, что если
. Очевидно, что если  , то
, то  = 180° (рис. 42.2).
= 180° (рис. 42.2).
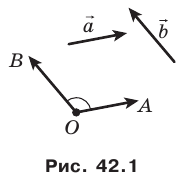
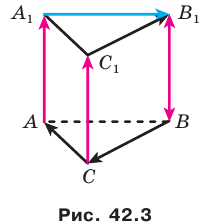
Если  , то считают, что
, то считают, что  . Если хотя бы один из векторов
. Если хотя бы один из векторов  или
или  нулевой, то также считают, что
нулевой, то также считают, что  .
.
Векторы  называют перпендикулярными, если угол между ними равен 90°. Записывают:
называют перпендикулярными, если угол между ними равен 90°. Записывают: 
На рисунке 42.3 изображена треугольная призма, основанием которой является правильный треугольник, а боковое ребро перпендикулярно плоскости основания.
Имеем:

Определение. Скалярным произведением двух векторов называют произведение их модулей и косинуса угла между ними.
Скалярное произведение векторов  обозначают так:
обозначают так:  Имеем:
Имеем: 
Если хотя бы один из векторов  нулевой, то очевидно, что
нулевой, то очевидно, что  Скалярное произведение
Скалярное произведение  называют скалярным квадратом вектора
называют скалярным квадратом вектора  и обозначают
и обозначают  .
.
Скалярный квадрат вектора равен квадрату его модуля, то есть  .
.
Теорема 42.1. Скалярное произведение двух ненулевых векторов равно нулю тогда и только тогда, когда эти векторы перпендикулярны. Например, для векторов, изображенных на рисунке 42.3, имеем: 
Теорема 42.2. Скалярное произведение векторов  и
и  можно вычислить по формуле
можно вычислить по формуле
Теорема 42.3. Косинус угла между ненулевыми векторами  можно вычислить по формуле
можно вычислить по формуле
Некоторые свойства скалярного произведения векторов аналогичны соответствующим свойствам произведения чисел. Например, для любых векторов  и любого числа
и любого числа  справедливы равенства:
справедливы равенства:
Эти свойства вместе со свойствами сложения векторов и умножения вектора на число позволяют преобразовывать выражения, содержащие скалярное произведение векторов, по правилам преобразования алгебраических выражений. Например,

Пример №51
Основанием призмы является равнобедренный треугольник АВС (АВ =АС). Боковое ребро  образует равные углы с ребрами АВ и АС (рис. 42.4). Докажите, что
образует равные углы с ребрами АВ и АС (рис. 42.4). Докажите, что  .
.
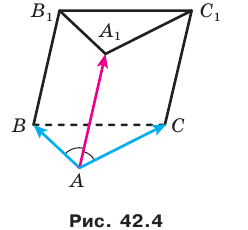
Решение:
Пусть  . С учетом условия можно записать:
. С учетом условия можно записать:  . Найдем скалярное произведение векторов
. Найдем скалярное произведение векторов  . Имеем:
. Имеем: 
Запишем: 

Поскольку  , то рассматриваемое скалярное произведение равно 0. Следовательно,
, то рассматриваемое скалярное произведение равно 0. Следовательно, 
Напомню:
Расстояние между точками
Расстояние между двумя точками  можно найти по формуле
можно найти по формуле 
Координаты середины отрезка
Каждая координата середины отрезка равна полусумме соответствующих координат его концов.
Взаимное расположение двух векторов
Два ненулевых вектора называют коллинеарными, если они лежат на параллельных прямых или на одной прямой. Нулевой вектор считают коллинеарным любому вектору.
Равенство векторов
Два ненулевых вектора называют равными, если их модули равны и они сонаправлены. Любые два нулевых вектора равны.
Координаты вектора
Если точки  — соответственно начало и конец вектора
— соответственно начало и конец вектора  , то числа
, то числа  равны соответственно первой, второй и третьей координатам вектора
равны соответственно первой, второй и третьей координатам вектора 
Модуль вектора
Если вектор  имеет координаты
имеет координаты 
Действия над векторами
Для любых трех точек А , В и С выполняется равенство 
Разностью векторов  называют такой вектор
называют такой вектор  , сумма которого с вектором
, сумма которого с вектором  равна вектору
равна вектору  .
.
Для любых трех точек О, А и В выполняется равенство  . Произведением ненулевого вектора
. Произведением ненулевого вектора  и числа
и числа  , отличного от нуля, называют такой вектор
, отличного от нуля, называют такой вектор  , что: 1)
, что: 1)  2) если
2) если  если
если 
Если векторы  коллинеарны и
коллинеарны и  , то существует такое число
, то существует такое число  , что
, что  Произведение
Произведение  обозначают
обозначают  и называют вектором, противоположным вектору
и называют вектором, противоположным вектору  .
.
Скалярным произведением двух векторов называют произведение их модулей и косинуса угла между ними. Скалярное произведение двух ненулевых векторов равно нулю тогда и только тогда, когда эти векторы перпендикулярны. Если координаты векторов  равны соответственно
равны соответственно  то:
то:
- Множества
- Рациональные уравнения
- Рациональные неравенства и их системы
- Геометрические задачи и методы их решения
- Предел и непрерывность числовой функции одной переменной
- Функции, их свойства и графики
- Параллельность в пространстве
- Перпендикулярность в пространстве