Траектория (от позднелатинского trajectories – относящийся к перемещению) – это линия, по которой движется тело (материальная точка). Траектория движения может быть прямой (тело перемещается в одном направлении) и криволинейной, то есть механическое движение может быть прямолинейным и криволинейным.
Траектория прямолинейного движения в данной системе координат – это прямая линия. Например, можно считать, что траектория движения автомобиля по ровной дороге без поворотов является прямолинейной.
Криволинейное движение – это движение тел по окружности, эллипсу, параболе или гиперболе. Пример криволинейного движения – движение точки на колесе движущегося автомобиля или движение автомобиля в повороте.
Движение может быть сложным. Например, траектория движения тела в начале пути может быть прямолинейной, затем криволинейной. Например, автомобиль в начале пути движется по прямой дороге, а затем дорога начинает «петлять» и автомобиль начинает криволинейное движение.
Путь
Путь – это длина траектории. Путь является скалярной величиной и в международной системе единиц СИ измеряется в метрах (м). Расчёт пути выполняется во многих задачах по физике. Некоторые примеры будут рассмотрены далее в этом учебнике.
Вектор перемещения
Вектор перемещения (или просто перемещение) – это направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением (рис. 1.1). Перемещение – величина векторная. Вектор перемещения направлен от начальной точки движения к конечной.
Модуль вектора перемещения (то есть длина отрезка, который соединяет начальную и конечную точки движения) может быть равен пройденному пути или быть меньше пройденного пути. Но никогда модуль вектора перемещения не может быть больше пройденного пути.
Модуль вектора перемещения равен пройденному пути, когда путь совпадает с траекторией (см. разделы Траектория и Путь), например, если из точки А в точку Б автомобиль перемещается по прямой дороге. Модуль вектора перемещения меньше пройденного пути, когда материальная точка движется по криволинейной траектории (рис. 1.1).
Рис. 1.1. Вектор перемещения и пройденный путь.
На рис. 1.1:
![]()
Ещё пример. Если автомобиль проедет по кругу один раз, то получится, что точка начала движения совпадёт с точкой конца движения и тогда вектор перемещения будет равен нулю, а пройденный путь будет равен длине окружности. Таким образом, путь и перемещение – это два разных понятия.
Правило сложения векторов
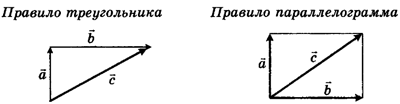
Векторы перемещений складываются геометрически по правилу сложения векторов (правило треугольника или правило параллелограмма, см. рис. 1.2).
Рис. 1.2. Сложение векторов перемещений.
На рис 1.2 показаны правила сложения векторов S1 и S2:
а) Сложение по правилу треугольника
б) Сложение по правилу параллелограмма
Проекции вектора перемещения
При решении задач по физике часто используют проекции вектора перемещения на координатные оси. Проекции вектора перемещения на координатные оси могут быть выражены через разности координат его конца и начала. Например, если материальная точка переместилась из точки А в точку В, то при этом вектор перемещения ![]() (см.рис. 1.3).
(см.рис. 1.3).
Выберем ось ОХ так, чтобы вектор ![]() лежал с этой осью в одной плоскости. Опустим перпендикуляры из точек А и В (из начальной и конечной точек вектора перемещения) до пересечения с осью ОХ. Таким образом мы получим проекции точек А и В на ось Х. Обозначим проекции точек А и В соответственно Аx и Вx. Длина отрезка АxВx на оси ОХ – это и есть проекция вектора перемещения на ось ОХ, то есть
лежал с этой осью в одной плоскости. Опустим перпендикуляры из точек А и В (из начальной и конечной точек вектора перемещения) до пересечения с осью ОХ. Таким образом мы получим проекции точек А и В на ось Х. Обозначим проекции точек А и В соответственно Аx и Вx. Длина отрезка АxВx на оси ОХ – это и есть проекция вектора перемещения на ось ОХ, то есть
Sx = AxBx
ВАЖНО!
Напоминаю для тех, кто не очень хорошо знает математику: не путайте вектор ![]() с проекцией вектора на какую-либо ось (например, Sx). Вектор всегда обозначается буквой или несколькими буквами, над которыми находится стрелка. В некоторых электронных документах стрелку не ставят, так как это может вызвать затруднения при создании электронного документа. В таких случаях ориентируйтесь на содержание статьи, где рядом с буквой может быть написано слово «вектор» или каким-либо другим способом вам указывают на то, что это именно вектор, а не просто отрезок.
с проекцией вектора на какую-либо ось (например, Sx). Вектор всегда обозначается буквой или несколькими буквами, над которыми находится стрелка. В некоторых электронных документах стрелку не ставят, так как это может вызвать затруднения при создании электронного документа. В таких случаях ориентируйтесь на содержание статьи, где рядом с буквой может быть написано слово «вектор» или каким-либо другим способом вам указывают на то, что это именно вектор, а не просто отрезок.
Рис. 1.3. Проекция вектора перемещения.
Проекция вектора перемещения на ось ОХ равна разности координат конца и начала вектора, то есть
Sx = x – x0
Аналогично определяются и записываются проекции вектора перемещения на оси OY и OZ:
Sy = y – y0 Sz = z – z0
Здесь x0, y0, z0 — начальные координаты, или координаты начального положения тела (материальной точки); x, y, z — конечные координаты, или координаты последующего положения тела (материальной точки).
Проекция вектора перемещения считается положительной, если направление вектора и направление координатной оси совпадают (как на рис 1.3). Если направление вектора и направление координатной оси не совпадают (противоположны), то проекция вектора отрицательна (рис. 1.4).
Если вектор перемещения параллелен оси, то модуль его проекции равен модулю самого Вектора. Если вектор перемещения перпендикулярен оси, то модуль его проекции равен нулю (рис. 1.4).
Рис. 1.4. Модули проекции вектора перемещения.
Разность между последующим и начальным значениями какой-нибудь величины называется изменением этой величины. То есть проекция вектора перемещения на координатную ось равна изменению соответствующей координаты. Например, для случая, когда тело перемещается перпендикулярно оси Х (рис. 1.4) получается, что относительно оси Х тело НЕ ПЕРЕМЕЩАЕТСЯ. То есть перемещение тела по оси Х равно нулю.
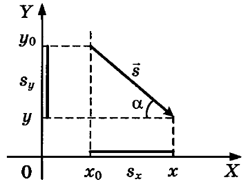
Рассмотрим пример движения тела на плоскости. Начальное положение тела – точка А с координатами х0 и у0, то есть А(х0, у0). Конечное положение тела – точка В с координатами х и у, то есть В(х, у). Найдём модуль перемещения тела.
Из точек А и В опустим перпендикуляры на оси координат ОХ и OY (рис. 1.5).
Рис. 1.5. Движение тела на плоскости.
Определим проекции вектора перемещения на осях ОХ и OY:
Sx = x – x0 Sy = y – y0
На рис. 1.5 видно, что треугольник АВС – прямоугольный. Из этого следует, что при решении задачи может использоваться теорема Пифагора, с помощью которой можно найти модуль вектора перемещения, так как
АС = sx CB = sy
По теореме Пифагора
S2 = Sx2 + Sy2
Откуда можно найти модуль вектора перемещения, то есть длину пути тела из точки А в точку В:
![]()
Ну и напоследок предлагаю вам закрепить полученные знания и рассчитать несколько примеров на ваше усмотрение. Для этого введите какие-либо цифры в поля координат и нажмите кнопку РАССЧИТАТЬ. Ваш браузер должен поддерживать выполнение сценариев (скриптов) JavaScript и выполнение сценариев должно быть разрешено в настройках вашего браузера, иначе расчет не будет выполнен. В вещественных числах целая и дробная части должны разделяться точкой, например, 10.5.
Траектория, длина пути, вектор перемещения
Траектория движения тела – это линия, которая была описана материальной точкой при перемещении из одной точки в другую с течением времени.
Виды движений тела
Существуют несколько видов движений и траекторий твердого тела:
- поступательное;
- вращательное, то есть движение по окружности;
- плоское, то есть перемещение по плоскости;
- сферическое, характеризующее движение по поверхности сферы;
- свободное, иначе говоря, произвольное.
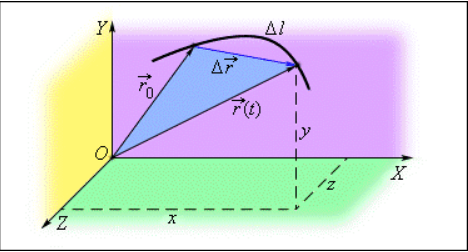
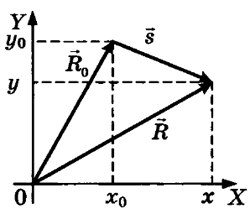
Рисунок 1 . Определение точки при помощи координат x = x ( t ) , y = y ( t ) , z = z ( t ) и радиус-вектора r → ( t ) , r 0 → является радиус-вектором точки в начальный момент времени
Положение материальной точки в пространстве в любой момент времени может быть задано при помощи закона движения, определенный координатным способом, через зависимость координат от времени x = x ( t ) , y = y ( t ) , z = z ( t ) или от времени радиус-вектора r → = r → ( t ) , проведенного из начала координат к заданной точке. Это показано на рисунке 1 .
Перемещение тела
Перемещение тела s → = ∆ r 12 → = r 2 → — r 1 → – направленный отрезок прямой, соединяющий начальную с конечной точкой траектории тела. Значение пройденного пути l равняется длине траектории, пройденной телом за определенный промежуток времени t .
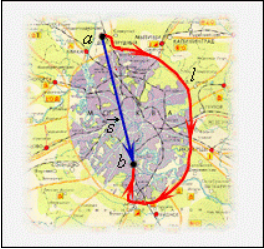
Рисунок 2 . Пройденный путь l и вектор перемещения s → при криволинейном движении тела, a и b – начальная и конечная точки пути, принятые в физике
По рисунку 2 видно, что при движении тела по криволинейной траектории модуль вектора перемещения всегда меньше пройденного пути.
Перемещение принято считать векторной величиной. Этот отрезок имеет направление.
Путь – скалярная величина. Считается числом.
Сумма двух последовательных перемещений из точки 1 в точку 2 и из токи 2 в точку 3 является перемещением из точки 1 в точку 3 , как показано на рисунке 3 .
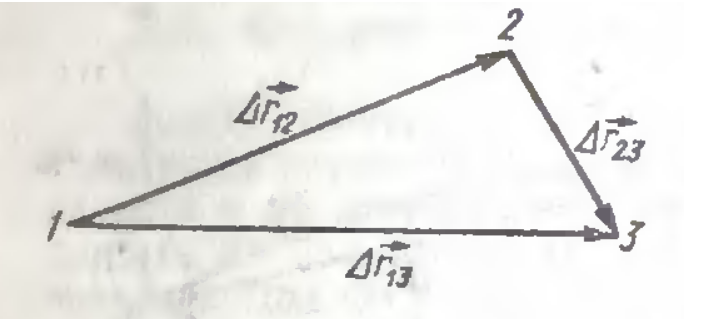
Рисунок 3 . Сумма двух последовательных перемещений ∆ r → 13 = ∆ r → 12 + ∆ r → 23 = r → 2 — r → 1 + r → 3 — r → 2 = r → 3 — r → 1
Когда радиус-вектор материальной точки в определенный момент времени t является r → ( t ) , в момент t + ∆ t есть r → ( t + ∆ t ) , тогда ее перемещение ∆ r → за время ∆ t равняется ∆ r → = r → ( t + ∆ t ) — r → ( t ) .
Перемещение ∆ r → считается функцией времени t : ∆ r → = ∆ r → ( t ) .
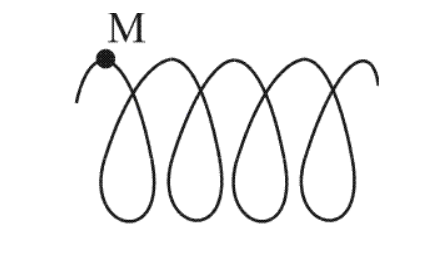
По условию дан движущийся самолет, представленный на рисунке 4 . Определить вид траектории точки М .
Необходимо рассмотреть систему отсчета I , называемую «Самолет» с траекторией движения точки М виде окружности.

Будет задана система отсчета II «Земля» с траекторией движения имеющейся точки М по спирали.
Дана материальная точка, которая совершает движение из А в В . Значение радиуса окружности R = 1 м . Произвести нахождение S , ∆ r → .
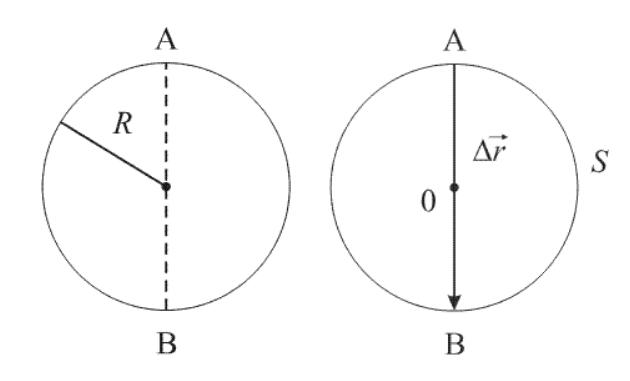
Во время движения из А в В точка проходит путь, который равен половине окружности, записываемой формулой:
Подставляем числовые значения и получаем:
S = 3 , 14 · 1 м = 3 , 14 м .
Перемещением ∆ r → в физике считается вектор, соединяющий начальное положение материальной точки с конечным, то есть А с В .
Вектор скорости и ускорения материальной точки и их модули. Пример решения задач.
В очередной раз меня попросили решить пару задачек по физике, и я вдруг обнаружил, что не могу решить их с ходу. Немного погуглив, я обнаружил, что сайты в топе выдачи содержат сканы одного и того же учебника и не описывают конкретных примеров решений задачи о том, как найти вектор скорости и ускорения материальной точки. По-этому я решил поделиться с миром примером своего решения.
Траектория движения материальной точки через радиус-вектор
Подзабыв этот раздел математики, в моей памяти уравнения движения материальной точки всегда представлялись при помощи знакомой всем нам зависимости y(x) , и взглянув на текст задачи, я немного опешил когда увидел векторы. Оказалось, что существует представление траектории материальной точки при помощи радиус-вектора – вектора, задающего положение точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.

Формула траектория движения материальной точки помимо радиус-вектора описывается так же ортами – единичными векторами i, j , k в нашем случае совпадающими с осями системы координат. И, наконец, рассмотрим пример уравнения траектории материальной точки (в двумерном пространстве):

Что интересного в данном примере? Траектория движения точки задается синусами и косинусами, как вы думаете, как будет выглядеть график в всем нам знакомом представлении y(x) ? “Наверное какой-то жуткий”, подумали вы, но все не так сложно как кажется! Попробуем построить траекторию движения материальной точки y(x), если она движется по представленному выше закону:

Здесь я заметил квадрат косинуса, если вы в каком-нибудь примере видите квадрат синуса или косинуса, это значит что нужно применять основное тригонометрическое тождество, что я и сделал (вторая формула) и преобразовал формулу координаты y, чтобы вместо синуса подставить в нее формулу изменения x:

В итоге жуткий закон движения точки оказался обычной параболой, ветви которой направлены вниз. Надеюсь, вы поняли примерный алгоритм построения зависимости y(x) из представления движения через радиус-вектор. Теперь перейдем к нашему главному вопросу: как же найти вектор скорости и ускорения материальной точки, а так же их модули.
Вектор скорости материальной точки

Всем известно, что скорость материальной точки – это величина пройденного пути точкой за единицу времени, то есть производная от формулы закона движения. Чтобы найти вектор скорости нужно взять производную по времени. Давайте рассмотрим конкретный пример нахождения вектора скорости.
Пример нахождения вектора скорости
Имеем закон перемещения материальной точки:

Теперь нужно взять производную от этого многочлена, если вы забыли как это делается, то вот вам таблица производных различных функций. В итоге вектор скорости будет иметь следующий вид:

Все оказалось проще, чем вы думали, теперь найдем вектор ускорения материальной точки по тому же самому закону, представленному выше.
Как найти вектор ускорения материальной точки

Вектор ускорения точки это векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Чтобы найти вектор ускорения материальной точки в нашем примере, нужно взять производную, но уже от формулы вектора скорости, представленной чуть выше:

Модуль вектора скорости точки
Теперь найдем модуль вектора скорости материальной точки. Как вы знаете из 9-го класса, модуль вектора – это его длина, в прямоугольных декартовых координатах равна квадратному корню из суммы квадратов его координат. И откуда же из полученного нами выше вектора скорости взять его координаты спросите вы? Все очень просто:

Теперь достаточно только подставить время, указанное в задаче и получить конкретное числовое значение.
Модуль вектора ускорения
Как вы поняли из написанного выше (и из 9-го класса), нахождение модуля вектора ускорения происходит тем же образом, что и модуля вектора скорости: извлекаем корень квадратный из суммы квадратов координат вектора, все просто! Ну и вот вам, конечно же, пример:

Как вы видите, ускорение материальной точки по заданному выше закону не зависит от времени и имеет постоянную величину и направление.
Еще примеры решений задачи нахождения вектора скорости и ускорения
А вот тут вы можете найти примеры решения и других задач по физике на тему “механика твердых тел”. А для тех, кто не совсем понял как найти вектор скорости и ускорения, вот вам еще парочка примеров из сети без всяких лишних объяснений, надеюсь, они вам помогут.

Если у вас возникли какие-нибудь вопросы, вы можете задать их в комментариях.
Способы описания движения. Векторный способ. Координатный способ




По этой ссылке вы найдёте полный курс лекций по математике:
кинематике существуют три способа аналитического описания движения материальной точки в пространстве. Рассмотрим их, ограничившись случаем движения материальной точки на плоскости, что позволит нам при выборе системы отсчёта задавать лишь две координатные оси. Рис. 1 Рис. 2 1.
Векторный способ. В этом способе положение материальной точки А задаётся с помощью так называемого радиус-вектора г, который представляет совой вектор, проведённый из точки О, соответствующей началу отсчёта выбранной системы координат, в интересующую нас точку А (рис. 1). В процессе движения материальной точки её радиус-вектор может изменяться как по модулю, так и по направлению, являясь функцией времени г = r(t).
Геометрическое место концов радиус-вектора г (t) называют траекторией точки А. В известном смысле траектория движения представляет собой след (явный или воображаемый), который «оставляет за собой» точка А после прохождения той или иной области пространства. Понятно, что геометрическая форма траектории зависит от выбора системы отсчёта, относительно которой ведётся наблюдение за движением точки.
Пусть в процессе движения по некоторой траектории в выбранной системе отсчёта за промежуток времени At тело (точка А) переместилось из начального положения 1 с радиус-вектором Т в конечное положение 2 с радиус-вектором Т (рис. 2). Приращение А г радиус-вектора тела в таком случае равно: Вектор Аг, соединяющий начальное и конечное положения тела, называют перемещением тела. Отношение Аг/At называют средней скоростью (средним вектором скорости) vcp тела за время At: Способы описания движения.
Векторный способ. Координатный способ. Естественный (или траекторный) способ Вектор vcp колли неарен и сонаправлен с вектором Аг, так как отличается от последнего лишь скалярным неотрицательным множителем 1 / Аг. Предложенное определение средней скорости справедливо для любых значений At, кроме Д/ = 0. Однако ничто не мешает брать промежуток времени At сколь угодно малым, но отличным от нуля.
Для точного описания движения вводят понятие мгновенной скорости, то есть скорости в конкретный момент времени t или в конкретной точке траектории. С этой целью промежуток времени At устремляют к нулю. Вместе с ним будет стремиться к нулю и перемещение Аг. При этом отношение А/ / At стремится к определённому значению, не зависящему от At. Величина, к которой стремится отношение Аг / At при стремлении At к нулю, называется мгновенной скоростью v: Теперь заметим, что чем меньше At, тем ближе направление Аг к направлению касательной к траектории в данной точке.
Следовательно, вектор мгновенной скорости направлен по касательной к траектории в данной точке в сторону движения тела. В дальнейшем там, где это не повлечёт недоразумений, мы будем опускать прилагательное «мгновенная» и говорить просто о скорости v тела (материальной точки). Движение тела принято характеризовать также ускорением, по которому судят об изменении скорости в процессе движения.
Его определяют через отношение приращения вектора скорости Av тела к промежутку времени А/, в течение которого это приращение произошло.
Ускорением а тела называется величина, к которой стремится отношение Av / At при стремлении к нулю знаменателя At: При уменьшении At ориентация вектора Av будет приближаться к определённому направлению, которое принимается за направление вектора ускорения а . Заметим, что ускорение направлено в сторону малого приращения скорости, а не в сторону самой скорости! Способы описания движения. Векторный способ. Координатный способ.
Возможно вам будут полезны данные страницы:
Естественный (или траекторный) способ Таким образом, зная зависимость г(/), можно найти скорость v и ускорение а тела в каждый момент времени. В этой связи возникает и обратная задача о нахождении скорости v(t) и радиус-вектора r(t) по известной зависимости от времени ускорения а . Для однозначного решения этой задачи необходимо знать начальные условия, т. е. скорость v0 и радиус-вектор г0 тела в начальный момент времени / = 0.
Напомним, что в системе СИ единицами длины, скорости и ускорения являются соответственно метр (м), метр в секунду (м/с) и метр на секунду в квадрате (м/с2 2. Координатный способ. В этом способе положение материальной точки А на плоскости в произвольный момент времени t определяется двумя координатами хну, которые представляют собой проекции радиус-вектора г тела на оси Ох и Оу соответственно (рис. 3). При движении тела его координаты изменяются со временем, т. е. являются функциями V= y(t).
Если эти функции известны
то они определяют положение тела на плоскости в любой момент времени. В свою очередь, вектор скорости v можно спроецировать на оси координат и определить таким образом скорости i и v.. изменения координат тела (рис. 4). В самом деле, vx и vy будут равны значениям, к которым стремятся соответственно отношения Ах/А t и Ay/At при стремлении к нулю промежутка времени At. Аналогично с помощью проецирования вектора а определяются ускорения ах и ах тела по направлениям координатных осей.
Таким образом, зная зависимости л(/) и >>(/), можно найти не только положение тела, но и проекции его скорости и ускорения, а следовательно, модуль и направление векторов v и а в любой момент времени. Например, модуль вектора скорости будет равен v=yjvx2+vv2 , а его направление может быть задано углом между этим вектором и любой осью координат. Так, угол а между вектором v и осью Ох определяется отношением tga = vy!vx. Аналогичными формулами определяются модуль и направление вектора а .
Обратная задача — нахождение скорости и зависимостей x(t) и y(t) по заданному ускорению — будет иметь однозначное решение, если кроме ускорения заданы ещё и начальные условия: проекции скорости и координаты точки в начальный момент времени t = 0. 3. Естественный (или траекторный) сносов. Этот способ применяют тогда, когда траектория материальной точки известна заранее.
На заданной траектории LM (рис. 5) выбирают начало отсчёта — неподвижную точку О, а положение движущейся материальной точки А определяют при помощи так называемой дуговой координаты /, которая представляет собой расстояние вдоль траектории от выбранного начала отсчёта О до точки А. При этом положительное направление отсчёта координаты / выбирают произвольно, по соображениям удобства, например так, как рис ^ показано стрелкой на рисунке 5.
Движение тела определено, если известны его траектория, начало отсчёта О, положительное направление отсчёта дуговой координаты I и зависимость l(t). Следующие два важных механических понятия — это пройденный путь и средняя путевая скорость. По определению, путь AS — это длина участка траектории, пройденного телом за промежуток времени At. Ясно, что пройденный путь — величина скалярная и неотрицательная, а потому его нельзя сравнивать с перемещением А г, представляющем собой вектор.
Сравнивать можно только путь AS и модуль перемещения Аг . Очевидно, что AS > |Аг|. Средней путевой скоростью г>ср тела называют отношение пути AS к промежутку времени At, в течение которого этот путь был пройден: Определённая ранее средняя скорость vc? (см. формулу (1)) и средняя путевая скорость отличаются друг от друга так же, как Аг отличается от AS, но при этом важно понимать, что обе средние скорости имеют смысл только тогда, когда указан промежуток времени усреднения At.
Само слово «средняя» означает усреднение по времени. Пример 1. Городской троллейбус утром вышел на маршрут, а через 8 часов, проехав в общей сложности 72 км, возвратился в парк и занял своё обычное место на стоянке. Какова средняя скорость vcp и средняя путевая скорость г>ср троллейбуса? Способы описания движения.
Векторный способ. Координатный способ. Естественный (или траекторный) способ Решение. Поскольку начальное и конечное положения троллейбуса совпадают, то его перемещение А г равно нулю Аг = 0, следовательно, = 0 . Но средняя путевая скорость троллейбуса не vcp=Ar/At = 0 и рср равна нулю.
Присылайте задания в любое время дня и ночи в ➔ 
Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
http://artsybashev.ru/zadachki-s-resheniem/vektor-skorosti-i-uskoreniya-materialnoi-tochki/
http://natalibrilenova.ru/sposobyi-opisaniya-dvizheniya-vektornyij-sposob-koordinatnyij-sposob/
На прошлом уроке мы научились находить координаты движущегося тела в определенный момент времени. Для этого мы использовали вектор перемещения, а точнее — его проекцию: $s_x = x_2 space − space x_1$. Итак, зная проекцию вектора перемещения и начальную координату тела, мы находили интересующую нас координату $x_2$, которую тело имеет по прошествии какого-то времени: $x_2 = x_1 space + space s_x$.

Но что делать, если вектор перемещения изначально не задан? На данном уроке вы узнаете, как его определить в самом простом случае — при прямолинейном и равномерном движении тела. А также вам предстоит знакомство с графиками зависимости модуля скорости и ее проекции от времени (они помогут нам в нахождении модуля и проекции перемещения) и уравнением движения тела.
Формулы скорости и перемещения в векторной форме
Для начала вспомним определение прямолинейного равномерного движения (рисунок 1).
Прямолинейное равномерное движение — это движение, при котором тело движется по прямолинейной траектории и проходит за любые равные промежутки времени одинаковые пути.

При таком движении перемещение тела с течением времени увеличивается. Быстроту этого увеличения характеризует скорость.
Что называется скоростью равномерного прямолинейного движения?
Скорость равномерного прямолинейного движения — это постоянная векторная величина, равная отношению перемещения тела за любой промежуток времени к значению этого промежутка:
$vec upsilon = frac{vec s}{t}$.
Скорость — это векторная величина: она имеет как направление, так и численное значение (ее модуль). Обратите внимание, что скорость при равномерном прямолинейном движении постоянна: не изменяется ни ее модуль, ни ее направление.
Теперь давайте выразим из формулы скорости искомое перемещение:
$vec s = vec upsilon t$.
Хорошо, теперь у нас есть формула для перемещения. Но она в векторной форме. С одной стороны, это дает нам возможность судить о том, как скорость и перемещение направлены относительно друг друга. Из наших формул видно, что при прямолинейном равномерном движении эти величины сонаправлены друг другу.
С другой стороны, в таком виде мы не сможем использовать формулу перемещения для расчетов. Теперь нам нужно получить формулу для проекции вектора перемещения.
Формула перемещения для практического использования
Итак, при решении задач нам понадобится формула, в которую будут входить проекции векторов на ось.
Как найти проекцию вектора перемещения тела, движущегося прямолинейно и равномерно, если известны проекция вектора скорости и время движения?
$s_x = upsilon_x t$.
Обратите внимание, что проекции $s_x$ и $upsilon_x$ могут иметь знак «минус». Это будет означать, что соответствующий проекции вектор направлен противоположно выбранной оси.
Например, если вектор скорости $vec upsilon_1$ сонаправлен оси OX (рисунок 2), то проекция скорости будет больше нуля: $upsilon_{1x} > 0$. Если же скорость $vec upsilon_2$ направлена против оси OX, то проекция этого вектора будет отрицательной: $upsilon_{2x} < 0$.

Мы не изображаем на рисунках и схемах проекцию вектора скорости подобно проекции вектора перемещения (мы рассчитываем проекцию вектора скорости по вышеприведенной формуле). Нам достаточно знать, что при равномерном прямолинейном движении вектор скорости всегда сонаправлен с вектором перемещения. Так, если тело двигалось противоположно направлению координатной оси, то проекция вектора перемещения будет отрицательной. Используя формулу $upsilon_x = frac{s_x}{t}$, мы получим отрицательную проекцию вектора скорости.
Модуль вектора перемещения и путь
Иногда мы можем встретить задачи, при решении которых нам будет неважно направление векторов перемещения и скорости. Тогда мы можем использовать уже знакомую вам формулу, в которой фигурируют модули величин:
$s = upsilon t$.
Используя эту формулу ранее, мы называли величину $s$ пройденным путем, а теперь называем ее перемещением. Ошибки здесь нет — это частный случай, когда путь равен модулю перемещения (рисунок 3).

При каком условии модуль вектора перемещения, совершенного телом за некоторый промежуток времени, равен пути, пройденному телом за тот же промежуток времени?
При движении в одном направлении модуль вектора перемещения, совершенного телом за некоторый промежуток времени, равен пути, пройденному этим телом за тот же промежуток времени.
Взгляните на рисунок 4, подтверждающий этот факт.

Если тело (автомобиль на рисунке 4) движется в одном направлении (например, из точки $O$ в точку $A$ или из точки $O$ в точку $C$), модуль вектора перемещения равен пройденному пути. Если же направление движения тела изменяется (например, при движении из точки $O$ в точку $B$ и обратно в точку $O$ или при движении по криволинейной траектории из точки $O$ в точку $D$), то путь, пройденный телом, будет больше модуля его перемещения.
График зависимости модуля вектора скорости от времени
Рассмотрим график зависимости модуля вектора скорости $upsilon$ от времени $t$. Тело при этом движется равномерно и прямолинейно (рисунок 5).

Модуль вектора перемещения $s$ в данном случае мы можем рассчитать по формуле:
$s = upsilon_1 t_1$.
А теперь взгляните на закрашенный зеленым цветом прямоугольник на рисунке 5. Его площадь $S$ по определению будет равна произведению его смежных сторон — $upsilon_1$ (длины отрезка $O upsilon_1$) и $t_1$ (длины отрезка $O t_1$).
При прямолинейном равномерном движении тела модуль вектора его перемещения численно равен площади прямоугольника (площади под графиком скорости), заключенного между графиком скорости, осью Ot и перпендикулярами к этой оси, восстановленными из точек, соответствующих моментам начала и конца наблюдения (в данном случае из точек $O$ и $t_1$).
График зависимости проекции вектора скорости от времени
И все-таки, чаще мы будем иметь дело с задачами, при решении которых нам понадобится использовать проекции векторов.
Например, обратимся к задаче с катерами из прошлого урока. Два катера двигаются в противоположных направлениях (рисунок 6). Один из них проходит $60 space км$, а другой — $50 space км$. Пусть эти перемещения совершены за время $t_1$, равное $2 space ч$.

В этом случае векторы скорости и перемещения первого катера будут сонаправлены друг другу, как и векторы скорости и перемещения второго катера. Их проекции: для первого катера они будут положительными, а для второго — отрицательными.
Проекция скорости первого катера:
$s_{1x} = upsilon_{1x} t_1$,
$upsilon_{1x} = frac{s_{1x}}{t_1}$,
$upsilon_{1x} = frac{60 space км}{2 space ч} = 30 frac{км}{ч}$.
Проекция скорости второго катера:
$upsilon_{2x} = frac{s_{2x}}{t_1}$,
$upsilon_{2x} = frac{−50 space км}{2 space ч} = −25 frac{км}{ч}$.
А теперь взгляните на графики зависимости проекций векторов скорости от времени (рисунок 7).

Какую информацию о движении двух тел можно получить по графикам, изображенным на рисунке 7?
Здесь мы видим и числовые значения проекций векторов скорости, и их знаки, а также знаки проекций перемещений, которые совершили катера за время $t_1$. Проекции этих перемещений численно равны площадям под графиками:
- проекция вектора перемещения $s_{1x}$ больше нуля и численно равна площади оранжевого прямоугольника;
- проекция вектора перемещения $s_{2x}$ меньше нуля и численно равна площади голубого прямоугольника.
Уравнение движения
Теперь получим формулу для определения координаты тела при неизвестном векторе перемещения.
Рассмотрим автомобиль, который двигается равномерно и прямолинейно по какому-то участку дороги (рисунок 8). За тело отсчета возьмем светофор и направим ось OX в сторону движения автомобиля.

Чему будет равна проекция перемещения автомобиля из точки с координатой $x_0$ в точку с координатой $x$?
По определению проекции:
$s_x = x space − space x_0$.
По определению проекции скорости:
$s_x = upsilon_x t$.
Приравняем правые части этих уравнений друг к другу:
$upsilon_x t = x space − space x_0$.
Теперь выразим отсюда искомую координату $x$ и получим кинематический закон движения или уравнение движения.
Для определения координаты движущегося тела в любой момент времени достаточно знать его начальную координату и проекцию скорости движения на ось:
$x = x_0 space + space upsilon_x t$.
Упражнения
Упражнение №1
Может ли график зависимости модуля вектора скорости от времени располагаться под осью Ot (то есть в области отрицательных значений оси скорости)?
Посмотреть ответ
Скрыть
Ответ:
График зависимости модуля вектора скорости от времени (рисунок 5) не может располагаться под осью Ot. Причина этому — само определение модуля какой-либо величины. Модуль — это всегда положительная величина.
Упражнение №2
Постройте графики зависимости проекций векторов скорости от времени для трех автомобилей, движущихся прямолинейно и равномерно, если два из них едут в одном направлении, а третий — навстречу им. Скорость первого автомобиля равна $60 frac{км}{ч}$, второго — $80 frac{км}{ч}$, а третьего — $90 frac{км}{ч}$.
Посмотреть ответ
Скрыть
Ответ:
Графики зависимости проекций векторов скорости от времени для трех автомобилей показаны на рисунке 9.

Автомобили движутся равномерно. Значит, скорость не изменяется с течением времени — графики представляют собой прямые, параллельные оси времени Ot.
Первые два автомобиля движутся в одном направлении — мы примем его за направление оси OX. Поэтому проекции векторов скорости $upsilon_{1x}$ и $upsilon_{2x}$ будут положительными. Третий автомобиль двигается в противоположную сторону. Значит, проекция его вектора скорости $upsilon_{3x}$ будет отрицательной.
Как найти перемещение тела
Кинематика изучает различные виды движения тела с заданной скоростью, направлением и траекторией. Чтобы определить его положение относительно точки начала пути, нужно найти перемещение тела.

Инструкция
Движение тела происходит по некоторой траектории. В случае прямолинейного движения ею является прямая линия, поэтому найти перемещение тела довольно просто: оно равно пройденному пути. В противном случае определить его можно по координатам начального и конечного положения в пространстве.
Величина перемещения материальной точки является векторной, поскольку она имеет направление. Следовательно, чтобы найти ее числовое значение, необходимо вычислить модуль вектора, соединяющего точки начала пути и его окончания.
Рассмотрим двухмерное координатное пространство. Пусть тело проделало путь от точки A (x0, y0) до точки B (x, y). Тогда, чтобы найти длину вектора АВ, опустите проекции его концов на оси абсцисс и ординат. Геометрически проекции относительно той и другой координатной оси можно представить в виде катетов прямоугольного треугольника с длинами:Sx = x – x0;Sy = y – y0, где Sx и Sy – проекции вектора на соответствующих осях.
Модуль вектора, т.е. длина перемещения тела, в свою очередь, является гипотенузой этого треугольника, длину которой легко определить по теореме Пифагора. Он равен квадратному корню из суммы квадратов проекций:S = √(Sx² + Sy²).
В трехмерном пространстве:S = √(Sx² + Sy² + Sz²), где Sz = z – z0.
Это формула является общей для любой разновидности движения. Вектор перемещения обладает несколькими свойствами: • его модуль не может превышать длину пройденного пути;• проекция перемещения может быть как положительной, так и отрицательной величиной, в то время как величина пути всегда больше нуля;• в общем случае перемещение не совпадает с траекторией движения тела, а его модуль не равен пути.
В частном случае прямолинейного движения тело перемещается только по одной оси, например, оси абсцисс. Тогда длина перемещения равна разности конечной и начальной первой координаты точек:S = x – x0.
Источники:
- как перемещается тело
Войти на сайт
или
Забыли пароль?
Еще не зарегистрированы?
This site is protected by reCAPTCHA and the Google Privacy Policy and Terms of Service apply.
Скорость (v) — физическая величина, численно равна пути (s), пройденного телом за единицу времени (t).

Путь (S) — длина траектории, по которой двигалось тело, численно равен произведению скорости (v) тела на время (t) движения.

Время движения (t) равно отношению пути (S), пройденного телом, к скорости (v) движения.

Средняя скорость (vср) равна отношению суммы участков пути (s1 s2, s3, . ), пройденного телом, к промежутку времени (t1+ t2+ t3+ . ), за который этот путь пройден.

Средняя скорость — это отношение длины пути, пройденного телом, ко времени, за которое этот путь был пройден.
Средняя скорость при неравномерном движении по прямой:  это отношение всего пути ко всему времени.
это отношение всего пути ко всему времени.
Два последовательных этапа с разными скоростями:  где
где 
При решении задач — сколько этапов движения столько будет составляющих: 
Проекция вектора перемещения на ось ОХ:

Проекция вектора перемещения на ось OY:

Проекция вектора на ось равна нулю, если вектор перпендикулярен оси.
Знаки проекций перемещения: проекцию считают положительной, если движение от проекции начала вектора к проекции конца происходит по направлению оси, и отрицательной, если против оси. В данном примере 
Модуль перемещения — это длина вектора перемещения:

По теореме Пифагора:

Проекции перемещения и угол наклона

В данном примере:

Уравнение координаты (в общем виде):


Радиус-вектор — вектор, начало которого совпадает с началом координат, а конец — с положением тела в данный момент времени. Проекции радиус-вектора на оси координат определяют координаты тела в данный момент времени.
Радиус-вектор позволяет задать положение материальной точки в заданной системе отсчета:
Равномерное прямолинейное движение — движение, при котором тело за любые равные промежутки времени, совершает равные перемещения.
Скорость при равномерном прямолинейном движении. Скорость  — векторная физическая величина, которая показывает, какое перемещение совершает тело за единицу времени.
— векторная физическая величина, которая показывает, какое перемещение совершает тело за единицу времени.
В векторном виде:
В проекциях на ось ОХ:
Дополнительные единицы измерения скорости:
1 км/ч = 1000 м/3600 с,
Измерительный прибор — спидометр — показывает модуль скорости.
Знак проекции скорости зависит от направления вектора скорости и оси координат:
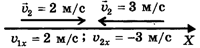
График проекции скорости представляет собой зависиость проекции скорости от времени:
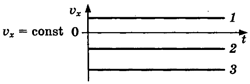
График скорости при равномерном прямолинейном движении — прямая, параллельная оси времени (1, 2, 3).
Если график лежит над осью времени (.1), то тело движется по направлению оси ОХ. Если график расположен под осью времени, то тело движется против оси ОХ (2, 3).
Чем дальше график от оси времени, тем больше модуль скорости (3).
Геометрический смысл перемещения.

При равномерном прямолинейном движении перемещение определяют по формуле  . Такой же результат получим, если вычислим площадь фигуры под графиком скорости в осях
. Такой же результат получим, если вычислим площадь фигуры под графиком скорости в осях  . Значит, для определения пути и модуля перемещения при прямолинейном движении необходимо вычислять площадь фигуры под графиком скорости в осях
. Значит, для определения пути и модуля перемещения при прямолинейном движении необходимо вычислять площадь фигуры под графиком скорости в осях  :
:

График проекции перемещения — зависимость проекции перемещения от времени.
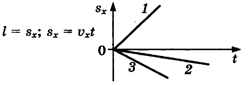
График проекции перемещения при равномерном прямолинейном движении — прямая, выходящая из начала координат (1, 2, 3).
Если прямая (1) лежит над осью времени, то тело движется по направлению оси ОХ, а если под осью (2, 3), то против оси ОХ.
Чем больше тангенс утла наклона (1) графика, тем больше модуль скорости.
График координаты — зависимость координаты тела от времени:
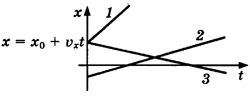
График координаты при равномерном прямолинейном движении — прямые (1, 2, 3).
Если с течением времени координата увеличивается (1, 2), то тело движется по направлению оси ОХ; если координата уменьшается (3), то тело движется против направления оси ОХ.
Чем больше тангенс угла наклона (1), тем больше модуль скорости.
Если графики координат двух тел пересекаются, то из точки пересечения следует опустить перпендикуляры на ось времени и ось координат.
Под относительностью мы понимаем зависимость чего-либо от выбора системы отсчета. Например, покой относителен; движение относительно и положение тела относительно.
Правило сложения перемещений. Векторная сумма перемещений

где  — перемещение тела относительно подвижной системы отсчета (ПСО);
— перемещение тела относительно подвижной системы отсчета (ПСО);  — перемещение ПСО относительно неподвижной системы отсчета (НСО);
— перемещение ПСО относительно неподвижной системы отсчета (НСО);  — перемещение тела относительно неподвижной системы отсчета (НСО).
— перемещение тела относительно неподвижной системы отсчета (НСО).
Векторное сложение: 
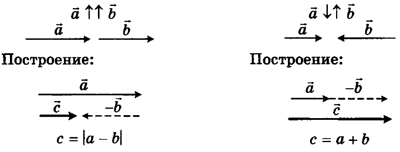
Сложение векторов, направленных вдоль одной прямой:

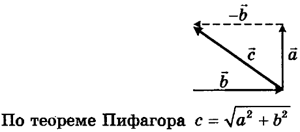
Сложение векторов, перпендикулярных друг другу 
По теореме Пифагора 
Сложение векторов, расположенных под углом  друг к другу
друг к другу

Правило сложения скоростей. Векторная сумма скоростей:

где  — скорость тела относительно подвижной системы отсчета (ПСО);
— скорость тела относительно подвижной системы отсчета (ПСО);  — скорость ПСО относительно неподвижной системы отсчета (НСО);
— скорость ПСО относительно неподвижной системы отсчета (НСО);  — скорость тела относительно неподвижной системы отсчета (НСО).
— скорость тела относительно неподвижной системы отсчета (НСО).
Относительная скорость. Векторная разность скоростей:

где  — скорость первого тела относительно второго (относительная скорость);
— скорость первого тела относительно второго (относительная скорость);  — скорость первого тела;
— скорость первого тела;  — скорость второго тела.
— скорость второго тела.
Вычитание векторов, направленных по одной прямой:
Вычитание векторов перпендикулярных друг другу 
Вычитание векторов, расположенных под углом  друг к другу:
друг к другу:
Траектория (от позднелатинского trajectories – относящийся к перемещению) – это линия, по которой движется тело (материальная точка). Траектория движения может быть прямой (тело перемещается в одном направлении) и криволинейной, то есть механическое движение может быть прямолинейным и криволинейным.
Траектория прямолинейного движения в данной системе координат – это прямая линия. Например, можно считать, что траектория движения автомобиля по ровной дороге без поворотов является прямолинейной.
Криволинейное движение – это движение тел по окружности, эллипсу, параболе или гиперболе. Пример криволинейного движения – движение точки на колесе движущегося автомобиля или движение автомобиля в повороте.
Движение может быть сложным. Например, траектория движения тела в начале пути может быть прямолинейной, затем криволинейной. Например, автомобиль в начале пути движется по прямой дороге, а затем дорога начинает «петлять» и автомобиль начинает криволинейное движение.
Путь – это длина траектории. Путь является скалярной величиной и в международной системе единиц СИ измеряется в метрах (м). Расчёт пути выполняется во многих задачах по физике. Некоторые примеры будут рассмотрены далее в этом учебнике.
Вектор перемещения
Вектор перемещения (или просто перемещение) – это направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением (рис. 1.1). Перемещение – величина векторная. Вектор перемещения направлен от начальной точки движения к конечной.
Модуль вектора перемещения (то есть длина отрезка, который соединяет начальную и конечную точки движения) может быть равен пройденному пути или быть меньше пройденного пути. Но никогда модуль вектора перемещения не может быть больше пройденного пути.
Модуль вектора перемещения равен пройденному пути, когда путь совпадает с траекторией (см. разделы Траектория и Путь), например, если из точки А в точку Б автомобиль перемещается по прямой дороге. Модуль вектора перемещения меньше пройденного пути, когда материальная точка движется по криволинейной траектории (рис. 1.1).
Рис. 1.1. Вектор перемещения и пройденный путь.

Ещё пример. Если автомобиль проедет по кругу один раз, то получится, что точка начала движения совпадёт с точкой конца движения и тогда вектор перемещения будет равен нулю, а пройденный путь будет равен длине окружности. Таким образом, путь и перемещение – это два разных понятия.
Правило сложения векторов
Векторы перемещений складываются геометрически по правилу сложения векторов (правило треугольника или правило параллелограмма, см. рис. 1.2).
Рис. 1.2. Сложение векторов перемещений.
На рис 1.2 показаны правила сложения векторов S1 и S2:
а) Сложение по правилу треугольника
б) Сложение по правилу параллелограмма
Проекции вектора перемещения
При решении задач по физике часто используют проекции вектора перемещения на координатные оси. Проекции вектора перемещения на координатные оси могут быть выражены через разности координат его конца и начала. Например, если материальная точка переместилась из точки А в точку В, то при этом вектор перемещения  (рис. 1.3).
(рис. 1.3).
Выберем ось ОХ так, чтобы вектор  лежал с этой осью в одной плоскости. Опустим перпендикуляры из точек А и В (из начальной и конечной точек вектора перемещения) до пересечения с осью ОХ. Таким образом мы получим проекции точек А и В на ось Х. Обозначим проекции точек А и В соответственно Аx и Вx. Длина отрезка АxВx на оси ОХ – это и есть проекция вектора перемещения на ось ОХ, то есть
лежал с этой осью в одной плоскости. Опустим перпендикуляры из точек А и В (из начальной и конечной точек вектора перемещения) до пересечения с осью ОХ. Таким образом мы получим проекции точек А и В на ось Х. Обозначим проекции точек А и В соответственно Аx и Вx. Длина отрезка АxВx на оси ОХ – это и есть проекция вектора перемещения на ось ОХ, то есть
Рис. 1.3. Проекция вектора перемещения.
Проекция вектора перемещения на ось ОХ равна разности координат конца и начала вектора, то есть Аналогично определяются и записываются проекции вектора перемещения на оси OY и OZ:
Здесь x, y, z — начальные координаты, или координаты начального положения тела (материальной точки); x, y, z — конечные координаты, или координаты последующего положения тела (материальной точки).
Проекция вектора перемещения считается положительной, если направление вектора и направление координатной оси совпадают (как на рис 1.3). Если направление вектора и направление координатной оси не совпадают (противоположны), то проекция вектора отрицательна (рис. 1.4).
Если вектор перемещения параллелен оси, то модуль его проекции равен модулю самого Вектора. Если вектор перемещения перпендикулярен оси, то модуль его проекции равен нулю (рис. 1.4).
Рис. 1.4. Модули проекции вектора перемещения.
Разность между последующим и начальным значениями какой-нибудь величины называется изменением этой величины. То есть проекция вектора перемещения на координатную ось равна изменению соответствующей координаты. Например, для случая, когда тело перемещается перпендикулярно оси Х (рис. 1.4) получается, что относительно оси Х тело НЕ ПЕРЕМЕЩАЕТСЯ. То есть перемещение тела по оси Х равно нулю.
Рассмотрим пример движения тела на плоскости. Начальное положение тела – точка А с координатами х и у, то есть А(х, у). Конечное положение тела – точка В с координатами х и у, то есть В(х, у). Найдём модуль перемещения тела.
Из точек А и В опустим перпендикуляры на оси координат ОХ и OY (рис. 1.5).
Рис. 1.5. Движение тела на плоскости.
Определим проекции вектора перемещения на осях ОХ и OY:
На рис. 1.5 видно, что треугольник АВС – прямоугольный. Из этого следует, что при решении задачи может использоваться теорема Пифагора, с помощью которой можно найти модуль вектора перемещения, так как
По теореме Пифагора
Откуда можно найти модуль вектора перемещения, то есть длину пути тела из точки А в точку В:

Ну и напоследок предлагаю вам закрепить полученные знания и рассчитать несколько примеров на ваше усмотрение. Для этого введите какие-либо цифры в поля координат и нажмите кнопку РАССЧИТАТЬ. Ваш браузер должен поддерживать выполнение сценариев (скриптов) JavaScript и выполнение сценариев должно быть разрешено в настройках вашего браузера, иначе расчет не будет выполнен. В вещественных числах целая и дробная части должны разделяться точкой, например, 10.5.
С понятием пути вы уже неоднократно сталкивались. Познакомимся теперь с новым для вас понятием – перемещением, которое более информативно и полезно в физике, чем понятие пути.
Допустим, из пункта А в пункт В на другом берегу реки нужно переправить груз. Это можно сделать на автомобиле через мост, на катере по реке или на вертолёте. В каждом из этих случаев путь, пройденный грузом, будет разным, но перемещение будет неизменным: из точки А в точку В.
Перемещением называют вектор, проведённый из начального положения тела в его конечное положение. Вектор перемещения показывает расстояние, на которое переместилось тело, и направление перемещения. Обратите внимание, что направление перемещения и направление движения – два разных понятия. Поясним это.
Рассмотрим, например, траекторию движения автомобиля от пункта А до середины моста. Обозначим промежуточные точки – В1, В2, В3 (см. рисунок). Вы видите, что на отрезке АВ1 автомобиль ехал на северо-восток (первая синяя стрелка), на отрезке В1В2 – на юго-восток (вторая синяя стрелка), а на отрезке В2В3 – на север (третья синяя стрелка). Итак, в момент проезда моста (точки В3) направление движения характеризовалось синим вектором В2В3, а направление перемещения – красным вектором АВ3.
Итак, перемещение тела – векторная величина, то есть имеющая пространственное направление и числовое значение (модуль). В отличие от перемещения, путь – скалярная величина, то есть имеющая только числовое значение (и не имеющая пространственного направления). Путь обозначают символом l, перемещение обозначают символом  (важно: со стрелочкой). Символом s без стрелочки обозначают модуль перемещения. Примечание: изображение любого вектора на чертеже (в виде стрелки) или упоминание его в тексте (в виде слова) делает необязательным наличие стрелочки над обозначением.
(важно: со стрелочкой). Символом s без стрелочки обозначают модуль перемещения. Примечание: изображение любого вектора на чертеже (в виде стрелки) или упоминание его в тексте (в виде слова) делает необязательным наличие стрелочки над обозначением.
Почему в физике не ограничились понятием пути, а ввели более сложное (векторное) понятие перемещения? Зная модуль и направление перемещения, всегда можно сказать, где будет находиться тело (по отношению к своему начальному положению). Зная путь, положение тела определить нельзя. Например, зная лишь, что турист прошёл путь 7 км, мы ничего не можем сказать о том, где он сейчас находится.
Задача. В походе по равнине турист прошёл на север 3 км, затем повернул на восток и прошел ещё 4 км. На каком расстоянии от начальной точки маршрута он оказался? Начертите его перемещение.
Решение 1 – с измерениями линейкой и транспортиром.
Перемещение – это вектор, соединяющий начальное и конечное положения тела. Начертим его на клетчатой бумаге в масштабе: 1 км – 1 см (чертёж справа). Измерив линейкой модуль построенного вектора, получим: 5 см. Согласно выбранному нами масштабу, модуль перемещения туриста равен 5 км. Но напомним: знать вектор – значит знать его модуль и направление. Поэтому, применив транспортир, определим: направление перемещения туриста составляет 53° с направлением на север (проверьте сами).
Решение 2 – без использования линейки и транспортира.
Поскольку угол между перемещениями туриста на север и на восток составляет 90°, применим теорему Пифагора и найдём длину гипотенузы, так как она одновременно является и модулем перемещения туриста:

Как видите, это значение совпадает с полученным в первом решении. Теперь определим угол α между перемещением (гипотенузой) и направлением на север (прилежащим катетом треугольника):

Итак, задача решена двумя способами с совпадающими ответами.