Матрица перехода
3 июля 2022
Матрица перехода — это просто квадратная матрица, в столбцах которой записаны координаты новых базисных векторов. У такой матрицы много важных свойств, которые сформулированы и доказаны в первой части урока — теоретической. Этой теории хватит для любого экзамена или коллоквиума.
Вторая часть урока — практическая. В ней разобраны все типовые задачи, которые встречаются на контрольных, зачётах и экзаменах.
Содержание
- Определение матрицы перехода
- Свойства матрицы перехода
- Теорема о замене координат
- Задача 1. Базисы трёхмерного пространства
- Задача 2. Базисы в поле вычетов
- Задача 3. Пространство многочленов
- Задача 4. Матрица перехода при симметрии
- Задача 5. Матрица поворота
Если вы учитесь в серьёзном университете (МГУ, Бауманка и т.д.), то обязательно изучите первые три пункта. А если вам нужны только задачи, сразу переходите к пункта 4—6.
1. Определение матрицы перехода
Пусть дано $n$-мерное линейное пространство $L$. Пусть также $left{ {{e}_{1}},ldots ,{{e}_{n}} right}$ и $left{ {{f}_{1}},ldots ,{{f}_{n}} right}$ — два базиса в $L$.
Определение. Матрица перехода ${{T}_{eto f}}$ от базиса $e=left{ {{e}_{1}},ldots ,{{e}_{n}} right}$ к базису $f=left{ {{f}_{1}},ldots ,{{f}_{n}} right}$ — это квадратная матрица порядка $n$, где по столбцам записаны координаты нового базиса $f$ в старом базисе $e$:
[{{T}_{eto f}}=left[ begin{array}{c|c|c|c}{{t}_{1,1}} & {{t}_{2,1}} & cdots & {{t}_{n,1}} \{{t}_{1,2}} & {{t}_{2,2}} & cdots & {{t}_{n,1}} \cdots & cdots & cdots & cdots \{{t}_{1,n}} & {{t}_{2,n}} & cdots & {{t}_{n,n}} \end{array} right]]
Обратите внимание на нумерацию элементов ${{t}_{i,j}}$: первый индекс обозначает номер столбца, т.е. номер нового базисного вектора, а второй отвечает за координаты этого вектора в старом базисе. Так, во втором столбце записаны координаты вектора ${{f}_{2}}$:
[{{f}_{2}}={{left[ {{t}_{2,1}},{{t}_{2,2}},ldots ,{{t}_{2,n}} right]}^{T}}]
Или, что то же самое, разложение вектора ${{f}_{2}}$ по базису $left{ {{e}_{1}},ldots ,{{e}_{n}} right}$:
[{{f}_{2}}={{t}_{2,1}}{{e}_{1}}+{{t}_{2,2}}{{e}_{2}}+ldots +{{t}_{2,n}}{{e}_{n}}]
Да, такая нумерация не является обязательной. Но она очень распространена именно в записи матриц перехода: первый индекс отвечает за номер базисного вектора, второй — за номер координаты этого вектора.
Пример 1. В некотором базисе $e=left{ {{e}_{1}},{{e}_{2}},{{e}_{3}} right}$ векторного пространства ${{mathbb{R}}^{3}}$ даны три вектора:
[{{f}_{1}}={{left( 1,0,1 right)}^{T}},quad {{f}_{2}}={{left( 2,1,0 right)}^{T}},quad {{f}_{3}}={{left( 0,3,1 right)}^{T}}]
[begin{align}{{f}_{1}} &={{left( 1,0,1 right)}^{T}}, \ {{f}_{2}} &={{left( 2,1,0 right)}^{T}}, \ {{f}_{3}} &={{left( 0,3,1 right)}^{T}} \ end{align}]
Убедитесь, что система векторов $f=left{ {{f}_{1}},{{f}_{2}},{{f}_{3}} right}$ образует базис в ${{mathbb{R}}^{3}}$, найдите матрицу перехода ${{T}_{eto f}}$.
Решение. Система векторов будет базисом, если эти векторы линейно независимы, а их количество совпадает с размерностью пространства. Поскольку у нас три вектора и $dim{{mathbb{R}}^{3}}=3$, осталось проверить линейную независимость. Составим матрицу из столбцов с координатами векторов ${{f}_{1}}$, ${{f}_{2}}$ и ${{f}_{3}}$:
[left[ begin{matrix}1 & 2 & 0 \ 0 & 1 & 3 \ 1 & 0 & 1 \ end{matrix} right]]
Вообще-то это и есть матрица перехода ${{T}_{eto f}}$, но сначала надо установить линейную независимость. Поэтому выполним элементарные преобразования строк:
[left[ begin{matrix} 1 & 2 & 0 \ 0 & 1 & 3 \ 1 & 0 & 1 \ end{matrix} right]begin{matrix} \ \ -1cdot left[ 1 right] \ end{matrix}sim left[ begin{array}{crc} 1 & 2 & 0 \ 0 & 1 & 3 \ 0 & -2 & 1 \ end{array} right]begin{matrix} -2cdot left[ 2 right] \ \ +2cdot left[ 2 right] \ end{matrix}sim left[ begin{array}{ccr} 1 & 0 & -6 \ 0 & 1 & 3 \ 0 & 0 & 7 \ end{array} right]]
[begin{align} & left[ begin{matrix} 1 & 2 & 0 \ 0 & 1 & 3 \ 1 & 0 & 1 \ end{matrix} right]begin{matrix} \ \ -1cdot left[ 1 right] \ end{matrix} \ & left[ begin{array}{crc} 1 & 2 & 0 \ 0 & 1 & 3 \ 0 & -2 & 1 \ end{array} right]begin{matrix} -2cdot left[ 2 right] \ \ +2cdot left[ 2 right] \ end{matrix} \ & left[ begin{array}{ccr} 1 & 0 & -6 \ 0 & 1 & 3 \ 0 & 0 & 7 \ end{array} right] \ end{align}]
Получили верхнетреугольную матрицу без нулей на главной диагонали. Ранг такой матрицы равен 3, поэтому система $left{ {{f}_{1}},{{f}_{2}},{{f}_{3}} right}$ линейно независима и образует базис. Матрица перехода от базиса $e$ к базису $f$ уже известна:
[{{T}_{eto f}}=left[ begin{matrix} 1 & 2 & 0 \ 0 & 1 & 3 \ 1 & 0 & 1 \ end{matrix} right]]
1.1. Зачем нужна матрица перехода
Матрица перехода нужна для того, чтобы компактно и наглядно выражать новый базис через старый. В самом деле, разложим векторы $left{ {{f}_{1}},ldots ,{{f}_{n}} right}$ нового базиса по старому базису $left{ {{e}_{1}},ldots ,{{e}_{n}} right}$:
[begin{align}{{f}_{1}} &={{x}_{1,1}}{{e}_{1}}+{{x}_{2,1}}{{e}_{2}}+ldots +{{x}_{n,1}}{{e}_{n}} \ {{f}_{2}} &={{x}_{1,2}}{{e}_{1}}+{{x}_{2,2}}{{e}_{2}}+ldots +{{x}_{n,2}}{{e}_{n}} \ & cdots \ {{f}_{n}} &={{x}_{1,n}}{{e}_{1}}+{{x}_{2,n}}{{e}_{2}}+ldots +{{x}_{n,n}}{{e}_{n}} \ end{align}]
Получили систему из $n$ уравнений, которые в матричном виде можно представить так:
[left[ begin{matrix} {{f}_{1}} & cdots & {{f}_{n}} \ end{matrix} right]=left[ begin{matrix} {{e}_{1}} & cdots & {{e}_{n}} \ end{matrix} right]cdot left[ begin{matrix} {{x}_{1,1}} & cdots & {{x}_{1,n}} \ cdots & cdots & cdots \ {{x}_{n,1}} & cdots & {{x}_{n,n}} \ end{matrix} right]]
[left[ {{f}_{1}} cdots {{f}_{n}} right]=left[ {{e}_{1}} cdots {{e}_{n}} right]cdot left[ begin{matrix} {{x}_{1,1}} & cdots & {{x}_{1,n}} \ cdots & cdots & cdots \ {{x}_{n,1}} & cdots & {{x}_{n,n}} \ end{matrix} right]]
Обратите внимание: ${{f}_{1}},ldots ,{{f}_{n}}$ и ${{e}_{1}},ldots ,{{e}_{n}}$ — это именно векторы, а не числа. Такие наборы принято записывать строками — в отличие от вектор-столбцов, элементами которых как раз выступают обычные числа.
Последний множитель — это и есть матрица перехода ${{T}_{eto f}}$, поэтому всё произведение можно записать более компактно:
[left[ begin{matrix} {{f}_{1}} & cdots & {{f}_{n}} \ end{matrix} right]=left[ begin{matrix} {{e}_{1}} & cdots & {{e}_{n}} \ end{matrix} right]cdot {{T}_{eto f}}]
2. Свойства матрицы перехода
Мы разберём три простых свойства, а далее отдельным разделом будет ещё одно — уже более серьёзное.
2.1. Переход от базиса к этому же базису
Свойство 1. При переходе от базиса $e$ к этому же базису $e$ матрица перехода ${{T}_{eto e}}=E$.
Для доказательства достаточно рассмотреть формулы
[begin{align}{{f}_{1}} &={{x}_{1,1}}{{e}_{1}}+{{x}_{2,1}}{{e}_{2}}+ldots +{{x}_{n,1}}{{e}_{n}} \ {{f}_{2}} &={{x}_{1,2}}{{e}_{1}}+{{x}_{2,2}}{{e}_{2}}+ldots +{{x}_{n,2}}{{e}_{n}} \ &cdots \ {{f}_{n}} &={{x}_{1,n}}{{e}_{1}}+{{x}_{2,n}}{{e}_{2}}+ldots +{{x}_{n,n}}{{e}_{n}} \ end{align}]
А затем положить ${{f}_{1}}={{e}_{1}}$, ${{f}_{2}}={{e}_{2}}$, …, ${{f}_{n}}={{e}_{n}}$. Тогда:
[begin{align} {{f}_{1}} &={{e}_{1}}=1cdot {{e}_{1}}+0cdot {{e}_{2}}+ldots +0cdot {{e}_{n}} \ {{f}_{2}} &={{e}_{2}}=0cdot {{e}_{1}}+1cdot {{e}_{2}}+ldots +0cdot {{e}_{n}} \ &cdots \ {{f}_{n}} &={{e}_{n}}=0cdot {{e}_{1}}+0cdot {{e}_{2}}+ldots +1cdot {{e}_{n}} \ end{align}]
Указанное выражение однозначно, поскольку $e$ — базис. Следовательно, матрица перехода равна
[{{T}_{eto f}}=left[ begin{array}{c|c|c|c} 1 & 0 & cdots& 0 \ 0 & 1 & cdots& 0 \ cdots& cdots& cdots& cdots \ 0 & 0 & cdots& 1 \ end{array} right]=E]
Итак, ${{T}_{eto f}}=E$, что и требовалось доказать.
2.2. Обратный переход
Свойство 2. Если ${{T}_{eto f}}$ — матрица перехода от базиса $e$ к базису $f$, то ${{T}_{fto e}}={{left( {{T}_{eto f}} right)}^{-1}}$ матрица обратного перехода, от базиса $f$ к базису $e$.
В самом деле, базисы $e$ и $f$ связаны с матрицей перехода по формуле
[left[ {{f}_{1}},ldots ,{{f}_{n}} right]=left[ {{e}_{1}},ldots ,{{e}_{n}} right]cdot {{T}_{eto f}}]
Поскольку матрица ${{T}_{eto f}}$ невырожденная, существует обратная к ней матрица ${{left( {{T}_{eto f}} right)}^{-1}}$. Домножим на эту матрицу обе части формулы, связывающей базисы $e$ и $f$:
[left[ {{f}_{1}},ldots ,{{f}_{n}} right]cdot {{left( {{T}_{eto f}} right)}^{-1}}=left[ {{e}_{1}},ldots ,{{e}_{n}} right]cdot {{T}_{eto f}}cdot {{left( {{T}_{eto f}} right)}^{-1}}]
[begin{align}left[ {{f}_{1}},ldots ,{{f}_{n}} right] &cdot {{left( {{T}_{eto f}} right)}^{-1}}= \ &=left[ {{e}_{1}},ldots ,{{e}_{n}} right]cdot {{T}_{eto f}}cdot {{left( {{T}_{eto f}} right)}^{-1}} \ end{align}]
Упрощаем эту формулу и получаем
[left[ {{e}_{1}},ldots ,{{e}_{n}} right]=left[ {{f}_{1}},ldots ,{{f}_{n}} right]cdot {{left( {{T}_{eto f}} right)}^{-1}}]
Итак, мы получили формулу перехода от базиса $f$ к базису $e$. Следовательно, ${{left( {{T}_{eto f}} right)}^{-1}}$ — матрица такого перехода, что и требовалось доказать.
2.3. Переход через транзитный базис
Пусть ${{T}_{eto f}}$ — матрица перехода от базиса $e$ к базису $f$ линейного пространства $L$, а ${{T}_{fto g}}$ — матрица перехода от базиса $f$ к базису $g$ того же линейного пространства $L$.
Тогда матрица перехода ${{T}_{eto g}}$ от базиса $e$ к базису $g$ находится по формуле
[{{T}_{eto g}}={{T}_{eto f}}cdot {{T}_{fto g}}]
Для доказательства достаточно записать формулы для выражения базисов $f$ и $g$, а затем подставить одну формулу в другую. По условию теоремы, базис $f$ выражается через базис $e$ по формуле
[left[ {{f}_{1}},ldots ,{{f}_{n}} right]=left[ {{e}_{1}},ldots ,{{e}_{n}} right]cdot {{T}_{eto f}}]
Кроме того, базис $g$ выражается через базис $f$ по формуле
[left[ {{g}_{1}},ldots ,{{g}_{n}} right]=left[ {{f}_{1}},ldots ,{{f}_{n}} right]cdot {{T}_{fto g}}]
Подставим первое выражение во второе и получим
[begin{align}left[ {{g}_{1}},ldots ,{{g}_{n}} right] &=left[ {{f}_{1}},ldots ,{{f}_{n}} right]cdot {{T}_{fto g}}= \ &=left( left[ {{e}_{1}},ldots ,{{e}_{n}} right]cdot {{T}_{eto f}} right)cdot {{T}_{fto g}}= \ & =left[ {{e}_{1}},ldots ,{{e}_{n}} right]cdot left( {{T}_{eto f}}cdot {{T}_{fto g}} right) end{align}]
[begin{align}& left[ {{g}_{1}},ldots ,{{g}_{n}} right]= \ =& left[ {{f}_{1}},ldots ,{{f}_{n}} right]cdot {{T}_{fto g}}= \ =& left( left[ {{e}_{1}},ldots ,{{e}_{n}} right]cdot {{T}_{eto f}} right)cdot {{T}_{fto g}}= \ =& left[ {{e}_{1}},ldots ,{{e}_{n}} right]cdot left( {{T}_{eto f}}cdot {{T}_{fto g}} right) end{align}]
Мы получили прямое выражение базиса $g$ через базис $e$, причём матрица перехода равна
[{{T}_{eto g}}={{T}_{eto f}}cdot {{T}_{fto g}}]
Это именно та формула, которую и требовалось доказать.
2.4. Невырожденные матрицы
И ещё одно важное свойство:
Свойство 4. Пусть дана произвольная квадратная невырожденная матрица
[T=left[ begin{matrix}{{a}_{1,1}} & {{a}_{1,2}} & cdots & {{a}_{1,n}} \ {{a}_{2,1}} & {{a}_{2,2}} & cdots & {{a}_{2,n}} \ cdots & cdots & cdots & cdots \ {{a}_{n,1}} & {{a}_{n,2}} & cdots & {{a}_{n,n}} \ end{matrix} right]]
Пусть $left{ {{e}_{1}},ldots ,{{e}_{n}} right}$ — произвольный базис линейного пространства $L$. Тогда система векторов $left{ {{f}_{1}},ldots ,{{f}_{n}} right}$, полученных по формуле
[begin{align}{{f}_{1}}&={{a}_{1,1}}{{e}_{1}}+{{a}_{2,1}}{{e}_{2}}+ldots +{{a}_{n,1}}{{e}_{n}} \ {{f}_{2}}&={{a}_{1,2}}{{e}_{1}}+{{a}_{2,2}}{{e}_{2}}+ldots +{{a}_{n,2}}{{e}_{n}} \ & cdots \ {{f}_{n}}&={{a}_{1,n}}{{e}_{1}}+{{a}_{2,n}}{{e}_{2}}+ldots +{{a}_{n,n}}{{e}_{n}} \ end{align}]
тоже будет базисом $L$.
Иначе говоря, всякая квадратная невырожденная матрица $T$ является матрицей перехода от данного базиса $left{ {{e}_{1}},ldots ,{{e}_{n}} right}$ к некоторому новому базису $left{ {{f}_{1}},ldots ,{{f}_{n}} right}$ линейного пространства $L$.
Обратите внимание: поскольку изначально мы не знаем, что $T$ — матрица перехода, её элементы пронумерованы стандартным образом: первый индекс отвечает за строку, а второй — за столбец. Однако это нисколько не помешает нам доказать теорему.
Для доказательства того, что $left{ {{f}_{1}},ldots ,{{f}_{n}} right}$ — базис линейного пространства $L$, нужно доказать два утверждения:
- 1.Система векторов $left{ {{f}_{1}},ldots ,{{f}_{n}} right}$ — линейно независима.
- 2.Ранг этой системы векторов совпадает с размерностью пространства $L$.
Поскольку количество векторов в системе $left{ {{f}_{1}},ldots ,{{f}_{n}} right}$ совпадает с количеством базисных векторов $left{ {{e}_{1}},ldots ,{{e}_{n}} right}$, т.е. равно $n=dim L$, достаточно лишь проверить линейную независимость.
Рассмотрим линейную комбинацию векторов $left{ {{f}_{1}},ldots ,{{f}_{n}} right}$ и предположим, что она равна нулю:
[{{lambda }_{1}}{{f}_{1}}+{{lambda }_{2}}{{f}_{2}}+ldots +{{lambda }_{n}}{{f}_{n}}=0]
В матричном виде это выглядит так:
[left[ {{f}_{1}},ldots ,{{f}_{n}} right]cdot left[ begin{align}& {{lambda }_{1}} \ & cdots\ & {{lambda }_{n}} \ end{align} right]=0]
По условию теоремы векторы $left{ {{f}_{1}},ldots ,{{f}_{n}} right}$ раскладываются по базису $left{ {{e}_{1}},ldots ,{{e}_{n}} right}$ с коэффициентами, записанными в столбцах матрицы $T$. В матричном виде это выглядит так:
[left[ {{f}_{1}},ldots ,{{f}_{n}} right]=left[ {{e}_{1}},ldots ,{{e}_{n}} right]cdot T]
Подставляем полученное выражение для $left{ {{f}_{1}},ldots ,{{f}_{n}} right}$ в предыдущее матричное уравнение и получаем
[left[ {{e}_{1}},ldots ,{{e}_{n}} right]cdot Tcdot left[ begin{align}& {{lambda }_{1}} \ & cdots \ & {{lambda }_{n}} \ end{align} right]=0]
Поскольку $left{ {{e}_{1}},ldots ,{{e}_{n}} right}$ — базис линейного пространства $L$, такое равенство возможно лишь при условии
[Tcdot left[ begin{matrix} {{lambda }_{1}} \ cdots \ {{lambda }_{n}} \ end{matrix} right]=left[ begin{matrix} 0 \ cdots \ 0 \ end{matrix} right]]
Это матричное уравнение можно рассматривать как систему из $n$ однородных уравнений относительно переменных ${{lambda }_{1}},ldots ,{{lambda }_{n}}$. И поскольку по условию теоремы матрица $T$ невырожденная, это СЛАУ имеет лишь одно решение — тривиальное:
[{{lambda }_{1}}={{lambda }_{2}}=ldots ={{lambda }_{n}}=0]
Получаем, что система векторов $left{ {{f}_{1}},ldots ,{{f}_{n}} right}$ линейно независима, а количество векторов совпадает с размерностью линейного пространства $L$. Следовательно, эта система — базис, что и требовалось доказать.
3. Замена координат в новом базисе
До сих пор мы рассуждали лишь о том, как координаты новых базисных векторов $left{ {{f}_{1}},ldots ,{{f}_{n}} right}$ выражаются через координаты старых базисных векторов $left{ {{e}_{1}},ldots ,{{e}_{n}} right}$. Но что будет с координатами одного и того же вектора линейного пространства $L$ при переходе от одного базиса к другому?
Ответ даёт следующая теорема.
3.1. Формулировка теоремы
Теорема. Пусть $e=left{ {{e}_{1}},ldots ,{{e}_{n}} right}$ и $f=left{ {{f}_{1}},ldots ,{{f}_{n}} right}$ — базисы линейного пространства $L$ над полем $K$. Пусть ${{T}_{eto f}}$ — матрица перехода от базиса $e$ к $f$:
[{{T}_{eto f}}=left[ begin{matrix}{{a}_{1,1}} & cdots& {{a}_{1,n}} \ cdots& cdots& cdots \ {{a}_{n,1}} & cdots & {{a}_{n,n}} \ end{matrix} right]]
Тогда координаты произвольного вектора $hin L$ пересчитываются по формуле
[{{left[ begin{matrix} {{x}_{1}} \ cdots \ {{x}_{n}} \ end{matrix} right]}_{e}}={{T}_{eto f}}cdot {{left[ begin{matrix} {{y}_{1}} \ cdots \ {{y}_{n}} \ end{matrix} right]}_{f}}]
Ещё раз: если произвольный вектор $hin L$ в новом базисе $f$ имеет координаты
[{{left[ h right]}_{f}}=left[ begin{matrix} {{y}_{1}} \ cdots \ {{y}_{n}} \ end{matrix} right]]
то в старом базисе $e$ этот же вектор $hin L$ имеет координаты
[{{left[ h right]}_{e}}=left[ begin{matrix} {{x}_{1}} \ cdots \ {{x}_{n}} \ end{matrix} right]={{T}_{eto f}}cdot left[ begin{matrix} {{y}_{1}} \ cdots \ {{y}_{n}} \ end{matrix} right]]
Т.е. для векторов всё наоборот: не новые координаты выражаются через старые, а старые — через новые. Впрочем, никто не мешает найти матрицу $T_{eto f}^{-1}$ и записать
[left[ begin{matrix} {{y}_{1}} \ cdots \ {{y}_{n}} \ end{matrix} right]=T_{eto f}^{-1}cdot left[ begin{matrix} {{x}_{1}} \ cdots \ {{x}_{n}} \ end{matrix} right]]
Но такая запись предполагает дополнительное действие — нахождение обратной матрицы.
3.2. Доказательство
Сначала «соберём» матрицу ${{T}_{eto f}}$. Для этого разложим векторы $left{ {{f}_{1}},ldots ,{{f}_{n}} right}$ по базису $left{ {{e}_{1}},ldots ,{{e}_{n}} right}$:
[left{ begin{align}{{f}_{1}} &={{a}_{1,1}}{{e}_{1}}+{{a}_{2,1}}{{e}_{2}}+ldots +{{a}_{n,1}}{{e}_{n}} \ {{f}_{2}} &={{a}_{1,2}}{{e}_{1}}+{{a}_{2,2}}{{e}_{2}}+ldots +{{a}_{n,2}}{{e}_{n}} \ & cdots \ {{f}_{n}} &={{a}_{1,n}}{{e}_{1}} +{{a}_{2,n}}{{e}_{2}}+ldots +{{a}_{n,n}}{{e}_{n}} \ end{align} right.]
В матричной форме эту систему линейных уравнений можно записать так:
[left[ begin{matrix} {{f}_{1}} \ {{f}_{2}} \ cdots \ {{f}_{n}} \ end{matrix} right]=left[ begin{matrix} {{a}_{1,1}} & {{a}_{2,1}} & cdots & {{a}_{n,1}} \ {{a}_{1,2}} & {{a}_{2,2}} & cdots & {{a}_{n,2}} \ cdots & cdots & cdots & cdots \ {{a}_{1,n}} & {{a}_{2,n}} & cdots & {{a}_{n,n}} \ end{matrix} right]cdot left[ begin{matrix} {{e}_{1}} \ {{e}_{2}} \ cdots \ {{e}_{n}} \ end{matrix} right]]
Транспонируем обе стороны равенства, учитывая, что произведение справа транспонируется по правилу ${{left( Acdot B right)}^{T}}={{B}^{T}}cdot {{A}^{T}}$:
[left[ begin{matrix}{{f}_{1}} & cdots & {{f}_{n}} \ end{matrix} right]=left[ begin{matrix} {{e}_{1}} & cdots & {{e}_{n}} \ end{matrix} right]cdot left[ begin{matrix} {{a}_{1,1}} & {{a}_{1,2}} & cdots & {{a}_{1,n}} \ {{a}_{2,1}} & {{a}_{2,2}} & cdots & {{a}_{2,n}} \ cdots & cdots & cdots & cdots \ {{a}_{n,1}} & {{a}_{n,2}} & cdots & {{a}_{n,n}} \ end{matrix} right]]
[left[ {{f}_{1}} cdots {{f}_{n}} right]=left[ {{e}_{1}} cdots {{e}_{n}} right]cdot left[ begin{matrix} {{a}_{1,1}} & cdots & {{a}_{1,n}} \ cdots & cdots & cdots \ {{a}_{n,1}} & cdots & {{a}_{n,n}} \ end{matrix} right]]
Квадратная матрица справа — это и есть матрица перехода ${{T}_{eto f}}$. Поэтому матричное уравнение можно переписать так:
[left[ begin{matrix}{{f}_{1}} & cdots& {{f}_{n}} \ end{matrix} right]=left[ begin{matrix}{{e}_{1}} & cdots& {{e}_{n}} \ end{matrix} right]cdot {{T}_{eto f}}]
Теперь возьмём произвольный вектор $hin L$ и разложим его по базисам $left{ {{e}_{1}},ldots ,{{e}_{n}} right}$ и $left{ {{f}_{1}},ldots ,{{f}_{n}} right}$:
[begin{align}h &={{x}_{1}}{{e}_{1}}+{{x}_{2}}{{e}_{2}}+ldots +{{x}_{n}}{{e}_{n}}= \ &={{y}_{1}}{{f}_{1}}+{{y}_{2}}{{f}_{2}}+ldots +{{y}_{n}}{{f}_{n}} end{align}]
Вновь перейдём к матричной форме. Сначала учтём, что координаты векторов принято записывать в виде вектор-столбцов:
[{{left[ h right]}_{e}}=left[ begin{matrix} {{x}_{1}} \ {{x}_{2}} \ cdots \ {{x}_{n}} \ end{matrix} right]quad {{left[ h right]}_{f}}=left[ begin{matrix} {{y}_{1}} \ {{y}_{2}} \ cdots \ {{y}_{n}} \ end{matrix} right]]
Тогда левую и правую часть уравнения можно представить как произведение строк с базисными векторами и указанных вектор-столбцов с координатами:
[left[ begin{matrix} {{e}_{1}} & cdots & {{e}_{n}} \ end{matrix} right]cdot left[ begin{matrix} {{x}_{1}} \ cdots \ {{x}_{n}} \ end{matrix} right]=left[ begin{matrix} {{f}_{1}} & cdots & {{f}_{n}} \ end{matrix} right]cdot left[ begin{matrix} {{y}_{1}} \ cdots \ {{y}_{n}} \ end{matrix} right]]
[left[ {{e}_{1}} cdots {{e}_{n}} right]cdot left[ begin{matrix} {{x}_{1}} \ cdots \ {{x}_{n}} \ end{matrix} right]=left[ {{f}_{1}} cdots {{f}_{n}} right]cdot left[ begin{matrix} {{y}_{1}} \ cdots \ {{y}_{n}} \ end{matrix} right]]
Но выше мы выражали строку векторов $left[ {{f}_{1}},ldots ,{{f}_{n}} right]$ через строку $left[ {{e}_{1}},ldots ,{{e}_{n}} right]$ и матрицу перехода ${{T}_{eto f}}$. Подставим это выражение в наше матричное уравнение:
[left[ begin{matrix} {{e}_{1}} & cdots & {{e}_{n}} \ end{matrix} right]cdot left[ begin{matrix} {{x}_{1}} \ cdots \ {{x}_{n}} \ end{matrix} right]=left[ begin{matrix} {{e}_{1}} & cdots & {{e}_{n}} \ end{matrix} right]cdot {{T}_{eto f}}cdot left[ begin{matrix} {{y}_{1}} \ cdots \ {{y}_{n}} \ end{matrix} right]]
[left[ {{e}_{1}} cdots {{e}_{n}} right]cdot left[ begin{matrix} {{x}_{1}} \ cdots \ {{x}_{n}} \ end{matrix} right]=left[ {{e}_{1}} cdots {{e}_{n}} right]cdot {{T}_{eto f}}cdot left[ begin{matrix} {{y}_{1}} \ cdots \ {{y}_{n}} \ end{matrix} right]]
Уберём слева и справа первый множитель — строку $left[ {{e}_{1}},ldots ,{{e}_{n}} right]$. Получим уравнение, связывающее координаты вектора в разных базисах:
[left[ begin{matrix} {{x}_{1}} \ cdots \ {{x}_{n}} \ end{matrix} right]={{T}_{eto f}}cdot left[ begin{matrix} {{y}_{1}} \ cdots \ {{y}_{n}} \ end{matrix} right]]
Это именно та формула, которую и требовалось доказать.
Задача 1. Базисы трёхмерного пространства
Задача. Убедитесь, что системы векторов
[{{a}_{1}}={{left( 1,2,1 right)}^{T}},quad {{a}_{2}}={{left( 2,3,2 right)}^{T}},quad {{a}_{3}}={{left( 1,-1,2 right)}^{T}}]
[begin{align}{{a}_{1}} &={{left( 1,2,1 right)}^{T}}, \ {{a}_{2}} &={{left( 2,3,2 right)}^{T}}, \ {{a}_{3}} &={{left( 1,-1,2 right)}^{T}} \ end{align}]
и
[{{b}_{1}}={{left( 1,3,1 right)}^{T}},quad {{b}_{2}}={{left( 1,-1,3 right)}^{T}},quad {{b}_{3}}={{left( 2,2,1 right)}^{T}}]
[begin{align}{{b}_{1}} &={{left( 1,3,1 right)}^{T}}, \ {{b}_{2}} &={{left( 1,-1,3 right)}^{T}}, \ {{b}_{3}} &={{left( 2,2,1 right)}^{T}} \ end{align}]
являются базисами в векторном пространстве ${{mathbb{R}}^{3}}$. Найдите матрицу перехода ${{T}_{ato b}}$. Найдите координаты в базисе $a$ вектора $x$, который в базисе $b$ имеет координаты ${{left( 0,3,2 right)}^{T}}$.
Решение
Чтобы доказать, что система векторов образует базис, достаточно составить матрицу $A$ из координат этих векторов, а затем вычислить её определитель $det A$. И если $det Ane 0$, то векторы линейно независимы. А поскольку их количество совпадает с размерностью линейного пространства, такие векторы образуют базис.
Рассмотрим систему векторов $a=left{ {{a}_{1}},{{a}_{2}},{{a}_{3}} right}$. Составим из них матрицу, расположив координаты по столбцам. Получим матрицу перехода ${{T}_{eto a}}$ от некого исходного базиса $e$ (в котором как раз и даны координаты векторов ${{a}_{i}}$ и ${{b}_{i}}$ в условии задачи) к базису $a$:
[{{T}_{eto a}}=left[ begin{array}{ccr} 1 & 2 & 1 \ 2 & 3 & -1 \ 1 & 2 & 2 \ end{array} right]]
Определитель этой матрицы отличен от нуля:
[det {{T}_{eto a}}=-1ne 0]
Следовательно, $left{ {{a}_{1}},{{a}_{2}},{{a}_{3}} right}$ — базис пространства ${{mathbb{R}}^{3}}$.
Теперь составим матрицу из векторов $b=left{ {{b}_{1}},{{b}_{2}},{{b}_{3}} right}$. Получим матрицу перехода ${{T}_{eto b}}$:
[{{T}_{eto b}}=left[ begin{array}{crc} 1 & 1 & 2 \ 3 & -1 & 2 \ 1 & 3 & 1 \ end{array} right]]
Определитель этой матрицы вновь отличен от нуля:
[det {{T}_{eto b}}=12ne 0]
Следовательно, $left{ {{b}_{1}},{{b}_{2}},{{b}_{3}} right}$ — тоже базис пространства ${{mathbb{R}}^{3}}$.
Осталось найти матрицу перехода ${{T}_{ato b}}$. Заметим, что эту матрицу можно выразить так:
[begin{align}{{T}_{ato b}} &={{T}_{ato e}}cdot {{T}_{eto b}}= \ &={{left( {{T}_{eto a}} right)}^{-1}}cdot {{T}_{eto b}}end{align}]
Мы внедрили «транзитный» базис $e$ и вместо прямого перехода $ato b$ рассмотрели цепочку $ato eto b$. Это стандартный и очень распространённый приём, но из-за этого появился новый элемент $T_{eto a}^{-1}$ — матрица, обратная к ${{T}_{eto a}}$. Найдём $T_{eto a}^{-1}$ методом присоединённой матрицы:
[left[ {{T}_{eto a}}|E right]sim ldots sim left[ E|T_{eto a}^{-1} right]]
Напомню, что элементарные преобразования в присоединённых матрицах выполняются только над строками. Если вы забыли, как всё это работает, см. урок «Обратная матрица». В нашем случае получим:
[left[ begin{array}{ccr|ccc}1 & 2 & 1 & 1 & 0 & 0 \ 2 & 3 & -1 & 0 & 1 & 0 \ 1 & 2 & 2 & 0 & 0 & 1 \end{array} right]begin{matrix} , \ -2cdot left[ 1 right] \ -1cdot left[ 1 right] \ end{matrix}]
Мы «зачистили» первый столбец. Теперь «зачистим» последний:
[left[ begin{array}{crr|rcc} 1 & 2 & 1 & 1 & 0 & 0 \ 0 & -1 & -3 & -2 & 1 & 0 \ 0 & 0 & 1 & -1 & 0 & 1 \ end{array} right]begin{matrix} -1cdot left[ 3 right] \ +3cdot left[ 3 right] \ , \ end{matrix}]
Остался лишь средний. Разберёмся и с ним:
[left[ begin{array}{crc|rcr} 1 & 2 & 0 & 2 & 0 & -1 \ 0 & -1 & 0 & -5 & 1 & 3 \ 0 & 0 & 1 & -1 & 0 & 1 \ end{array} right]begin{matrix} +2cdot left[ 2 right] \ |cdot left( -1 right) \ , \ end{matrix}]
Получили единичную матрицу слева от вертикальной черты. Значит, справа стоит искомая матрица $T_{eto a}^{-1}$:
[left[ begin{array}{ccc|rrr} 1 & 0 & 0 & -8 & 2 & 5 \ 0 & 1 & 0 & 5 & -1 & -3 \ 0 & 0 & 1 & -1 & 0 & 1 \ end{array} right]]
Теперь у нас есть всё, чтобы найти матрицу перехода ${{T}_{ato b}}$:
[{{T}_{ato b}}={{left( {{T}_{eto a}} right)}^{-1}}cdot {{T}_{eto b}}=left[ begin{array}{rrr} -8 & 2 & 5 \ 5 & -1 & -3 \ -1 & 0 & 1 \ end{array} right]cdot left[ begin{array}{crc} 1 & 1 & 2 \ 3 & -1 & 2 \ 1 & 3 & 1 \ end{array} right]]
[begin{align}{{T}_{ato b}} &={{left( {{T}_{eto a}} right)}^{-1}}cdot {{T}_{eto b}}= \ &=left[ begin{array}{rrr} -8 & 2 & 5 \ 5 & -1 & -3 \ -1 & 0 & 1 \ end{array} right]cdot left[ begin{array}{crc} 1 & 1 & 2 \ 3 & -1 & 2 \ 1 & 3 & 1 \ end{array} right] end{align}]
После несложных вычислений получаем матрицу перехода от базиса $a$ к базису $b$:
[{{T}_{ato b}}=left[ begin{array}{rrr} 3 & 5 & -7 \ -1 & -3 & 5 \ 0 & 2 & -1 \ end{array} right]]
Осталось найти координаты вектора $x$, который в базисе $b$ имеет координаты ${{left( 0,3,2 right)}^{T}}$. Вспомним формулу, выражающую координаты в старом базисе через координаты в новом базисе:
[{{left[ x right]}_{a}}={{T}_{ato b}}cdot {{left[ x right]}_{b}}]
Подставляем в эту формулу матрицу ${{T}_{ato b}}$ и вектор-столбец ${{left[ x right]}_{b}}={{left[ 0,3,2 right]}^{T}}$:
[{{left[ x right]}_{a}}=left[ begin{array}{rrr} 3 & 5 & -7 \ -1 & -3 & 5 \ 0 & 2 & -1 \ end{array} right]cdot left[ begin{matrix} 0 \ 3 \ 2 \ end{matrix} right]=left[ begin{matrix} 1 \ 1 \ 4 \ end{matrix} right]]
Итак, вектор $x$ в базисе $a$ имеет координаты ${{left( 1,1,4 right)}^{T}}$. Задача решена.
Альтернативное решение
Можно найти матрицу ${{T}_{ato b}}$ заметно быстрее, если использовать алгоритм решения матричных уравнений. Заметим, что нам требуется найти произведение
[{{T}_{ato b}}={{A}^{-1}}cdot B]
С другой стороны, для нахождения такого произведения достаточно составить присоединённую матрицу вида $left[ A|B right]$ и цепочкой элементарных преобразований свести её к виду
[left[ A|B right]sim ldots sim left[ E|{{A}^{-1}}cdot B right]]
Другими словами, справа от вертикальной черты мы получим искомую матрицу перехода ${{T}_{ato b}}$!
На практике это выглядит так. Записываем присоединённую матрицу $left[ A|B right]$:
[left[ begin{array}{ccr|crc} 1 & 2 & 1 & 1 & 1 & 2 \ 2 & 3 & -1 & 3 & -1 & 2 \ 1 & 2 & 2 & 1 & 2 & 1 \ end{array} right]]
И после элементарных преобразований получим
[left[ begin{array}{ccc|rrr} 1 & 0 & 0 & 3 & 5 & -7 \ 0 & 1 & 0 & -1 & -3 & 5 \ 0 & 0 & 1 & 0 & 2 & -1 \ end{array} right]]
Для экономии места я пропустил промежуточные шаги. Попробуйте сделать их самостоятельно — это очень полезная практика.
Если же вы хотите разобраться, как это работает (и почему вдруг справа возникает матрица вида ${{A}^{-1}}cdot B$), см. урок «Матричные уравнения». А мы идём дальше.
Задача 2. Базисы в поле вычетов
Найдите матрицу перехода от базиса
[{{a}_{1}}={{left( 1,1,1 right)}^{T}},quad {{a}_{2}}={{left( 2,1,1 right)}^{T}},quad {{a}_{3}}={{left( 3,2,1 right)}^{T}}]
[begin{align}{{a}_{1}} &={{left( 1,1,1 right)}^{T}}, \ {{a}_{2}} &={{left( 2,1,1 right)}^{T}}, \ {{a}_{3}} &={{left( 3,2,1 right)}^{T}} \ end{align}]
к базису
[{{b}_{1}}={{left( 0,4,3 right)}^{T}},quad {{b}_{2}}={{left( 3,3,2 right)}^{T}},quad {{b}_{3}}={{left( 2,2,1 right)}^{T}}]
[begin{align}{{b}_{1}} &={{left( 0,4,3 right)}^{T}}, \ {{b}_{2}} &={{left( 3,3,2 right)}^{T}}, \ {{b}_{3}} &={{left( 2,2,1 right)}^{T}} \ end{align}]
арифметического линейного пространства $mathbb{Z}_{5}^{3}$.
Решение
Эта задача проще предыдущей, поскольку поле вычетов ${{mathbb{Z}}_{5}}$ является конечным и состоит всего из пяти элементов — представителей смежных классов:
[{{mathbb{Z}}_{5}}=left{ 0,1,2,3,4 right}]
Как и в предыдущей задаче, рассмотрим систему векторов $a=left{ {{a}_{1}},{{a}_{2}},{{a}_{3}} right}$ и составим из них матрицу ${{T}_{eto a}}$:
[{{T}_{eto a}}=left[ begin{matrix} 1 & 2 & 3 \ 1 & 1 & 2 \ 1 & 1 & 1 \ end{matrix} right]]
Определитель $det {{T}_{eto a}}=1ne 0$, поэтому $left{ {{a}_{1}},{{a}_{2}},{{a}_{3}} right}$ — базис.
Аналогично, рассмотрим систему $b=left{ {{b}_{1}},{{b}_{2}},{{b}_{3}} right}$ и составим матрицу ${{T}_{eto b}}$:
[{{T}_{eto b}}=left[ begin{matrix} 0 & 3 & 2 \ 4 & 3 & 2 \ 3 & 2 & 1 \ end{matrix} right]]
Определитель $det {{T}_{eto b}}=4ne 0$, поэтому $left{ {{b}_{1}},{{b}_{2}},{{b}_{3}} right}$ — базис.
Выразим искомую матрицу ${{T}_{ato b}}$ через «транзитный» базис $e$:
[begin{align}{{T}_{ato b}} &={{T}_{ato e}}cdot {{T}_{eto b}}= \ &={{left( {{T}_{eto a}} right)}^{-1}}cdot {{T}_{eto b}} end{align}]
Найдём $T_{eto a}^{-1}$ через присоединённую матрицу:
[left[ begin{array}{ccc|ccc} 1 & 2 & 3 & 1 & 0 & 0 \ 1 & 1 & 2 & 0 & 1 & 0 \ 1 & 1 & 1 & 0 & 0 & 1 \ end{array} right]]
После цепочки элементарных преобразований над строками (попробуйте выполнить их самостоятельно!) получим
[left[ begin{array}{ccc|ccc} 1 & 0 & 0 & 4 & 1 & 1 \ 0 & 1 & 0 & 1 & 3 & 1 \ 0 & 0 & 1 & 0 & 1 & 4 \ end{array} right]]
Итак, мы нашли матрицу $T_{eto a}^{-1}$:
[T_{eto a}^{-1}=left[ begin{matrix} 4 & 1 & 1 \ 1 & 3 & 1 \ 0 & 1 & 4 \ end{matrix} right]]
Осталось вычислить искомую матрицу перехода ${{T}_{ato b}}$:
[{{T}_{ato b}}={{left( {{T}_{eto a}} right)}^{-1}}cdot {{T}_{eto b}}=left[ begin{matrix} 4 & 1 & 1 \ 1 & 3 & 1 \ 0 & 1 & 4 \ end{matrix} right]cdot left[ begin{matrix} 0 & 3 & 2 \ 4 & 3 & 2 \ 3 & 2 & 1 \ end{matrix} right]=left[ begin{matrix} 2 & 2 & 1 \ 0 & 4 & 4 \ 1 & 1 & 1 \ end{matrix} right]]
[begin{align}{{T}_{ato b}} &={{left( {{T}_{eto a}} right)}^{-1}}cdot {{T}_{eto b}}= \ &=left[ begin{matrix} 4 & 1 & 1 \ 1 & 3 & 1 \ 0 & 1 & 4 \ end{matrix} right]cdot left[ begin{matrix} 0 & 3 & 2 \ 4 & 3 & 2 \ 3 & 2 & 1 \ end{matrix} right]= \ &=left[ begin{matrix} 2 & 2 & 1 \ 0 & 4 & 4 \ 1 & 1 & 1 \ end{matrix} right] end{align}]
По аналогии с предыдущей задачей, матрицу ${{T}_{ato b}}$ можно найти и через элементарные преобразования присоединённой матрицы $left[ A|B right]$. Результат будет точно такой же, но мы сэкономим пару строк вычислений и несколько минут времени.
Задача 3. Пространство многочленов
Убедитесь, что системы многочленов
[begin{align}e &=left{ 1,t-1,{{left( t-1 right)}^{2}} right} \ f &=left( 1,t+1,{{left( t+1 right)}^{2}} right) \ end{align}]
являются базисами в пространстве ${{P}_{3}}$ многочленов степени не выше 2. Найдите матрицу перехода ${{T}_{eto f}}$. Разложите по степеням $left( t-1 right)$ многочлен ${{left( t+1 right)}^{2}}+left( t+1 right)+1$.
Решение
Стандартным базисом в пространстве многочленов является система многочленов $p=left{ {{p}_{1}},{{p}_{2}},{{p}_{3}} right}$, где
[{{p}_{1}}=1quad {{p}_{2}}=tquad {{p}_{3}}={{t}^{2}}]
Выразим через базис $p$ многочлены из системы $e$:
[begin{align} & {{e}_{1}}=1={{p}_{1}} \ & {{e}_{2}}=t-1={{p}_{2}}-{{p}_{1}} \ & {{e}_{3}}={{left( t-1 right)}^{2}}={{t}^{2}}-2t+1={{p}_{3}}-2{{p}_{2}}+{{p}_{1}} end{align}]
[begin{align}{{e}_{1}} &=1={{p}_{1}} \ {{e}_{2}} &=t-1={{p}_{2}}-{{p}_{1}} \ {{e}_{3}} &={{left( t-1 right)}^{2}}= \ &={{t}^{2}}-2t+1= \ &={{p}_{3}}-2{{p}_{2}}+{{p}_{1}} end{align}]
Следовательно, матрица перехода ${{T}_{pto e}}$ выглядит так:
[{{T}_{pto e}}=left[ begin{array}{crr} 1 & -1 & 1 \ 0 & 1 & -2 \ 0 & 0 & 1 \ end{array} right]]
Аналогично, выразим через базис $p$ многочлены из системы $f$:
[begin{align} & {{f}_{1}}=1={{p}_{1}} \ & {{f}_{2}}=t+1={{p}_{2}}+{{p}_{1}} \ & {{f}_{3}}={{left( t+1 right)}^{2}}={{t}^{2}}+2t+1={{p}_{3}}+2{{p}_{2}}+{{p}_{1}} end{align}]
[begin{align}{{f}_{1}} &=1={{p}_{1}} \ {{f}_{2}} &=t+1={{p}_{2}}+{{p}_{1}} \ {{f}_{3}} &={{left( t+1 right)}^{2}}= \ &={{t}^{2}}+2t+1= \ &={{p}_{3}}+2{{p}_{2}}+{{p}_{1}} end{align}]
Получим матрицу перехода ${{T}_{pto f}}$:
[{{T}_{pto f}}=left[ begin{matrix} 1 & 1 & 1 \ 0 & 1 & 2 \ 0 & 0 & 1 \ end{matrix} right]]
Обе матрицы оказались верхнетреугольными, их определители отличны от нуля:
[begin{align} det {{T}_{pto e}} &=1cdot 1cdot 1=1 \ det {{T}_{pto f}} &=1cdot 1cdot 1=1 \ end{align}]
Следовательно системы многочленов $e$ и $f$ действительно являются базисами пространства ${{P}_{3}}$.
Теперь найдём матрицу перехода ${{T}_{eto f}}$. Для этого нам даже не потребуется искать обратную матрицу. Достаточно заметить, что векторы ${{f}_{1}}$ и ${{f}_{2}}$ легко раскладываются по базису $e$:
[begin{align}{{f}_{1}} &=1={{e}_{1}} \ {{f}_{2}} &=t+1=left( t-1 right)+2={{e}_{2}}+2{{e}_{1}} \ end{align}]
С вектором ${{f}_{3}}$ вычислений будет чуть больше:
[begin{align}{{f}_{3}} &={{left( t+1 right)}^{2}}= \ &={{left( t-1 right)}^{2}}+4t= \ &={{left( t-1 right)}^{2}}+4left( t-1 right)+4= \ &={{e}_{3}}+4{{e}_{2}}+4{{e}_{1}} end{align}]
Итого матрица перехода ${{T}_{eto f}}$ примет вид
[{{T}_{eto f}}=left[ begin{matrix} 1 & 2 & 4 \ 0 & 1 & 4 \ 0 & 0 & 1 \ end{matrix} right]]
Теперь разложим многочлен ${{left( t+1 right)}^{2}}+left( t+1 right)+1$ по базису $e$. Сначала перепишем этот многочлен так:
[begin{align}hleft( t right) &=1+left( t+1 right)+{{left( t+1 right)}^{2}}= \ &={{f}_{1}}+{{f}_{2}}+{{f}_{3}} end{align}]
Следовательно, в базисе $f$ многочлен $hleft( t right)$ имеет координаты ${{left( 1,1,1 right)}^{T}}$. Но тогда по теореме о замене координат этот же многочлен в базисе $e$ имеет координаты
[{{left[ h right]}_{e}}={{T}_{eto f}}cdot {{left[ h right]}_{f}}=left[ begin{matrix} 1 & 2 & 4 \ 0 & 1 & 4 \ 0 & 0 & 1 \ end{matrix} right]cdot left[ begin{matrix} 1 \ 1 \ 1 \ end{matrix} right]=left[ begin{matrix} 7 \ 5 \ 1 \ end{matrix} right]]
[begin{align}{{left[ h right]}_{e}} &={{T}_{eto f}}cdot {{left[ h right]}_{f}}= \ &=left[ begin{matrix} 1 & 2 & 4 \ 0 & 1 & 4 \ 0 & 0 & 1 \ end{matrix} right]cdot left[ begin{matrix} 1 \ 1 \ 1 \ end{matrix} right]=left[ begin{matrix} 7 \ 5 \ 1 \ end{matrix} right] end{align}]
Другими словами, многочлен $hleft( t right)$ имеет вид
[hleft( t right)={{left( t-1 right)}^{2}}+5left( t-1 right)+7]
Это и есть искомое разложение многочлена ${{left( t+1 right)}^{2}}+left( t+1 right)+1$ по степеням $left( t-1 right)$.
Альтернативное решение
Искомое разложение можно получить и без привлечения матриц перехода. Достаточно применить схему Горнера или выделить нужные степени напрямую:
[begin{align}hleft( t right) &={{left( t+1 right)}^{2}}+left( t+1 right)+1= \ &={{left( t-1 right)}^{2}}+4t+t+1+1= \ &={{left( t-1 right)}^{2}}+5left( t-1 right)+5+2= \ &={{left( t-1 right)}^{2}}+5left( t-1 right)+7 end{align}]
Как видим, результат получился тем же самым, а времени потрачено меньше. Однако уже в пространстве ${{P}_{4}}$ многочленов степени не выше 4 сложность решения через матрицы и через выделение степеней будет сопоставимой. А дальше матрицы начнут выигрывать.
Смысл линейной алгебры — дать универсальные алгоритмы, которые работают с объектами любой природы, если эти объекты подчиняются аксиомам линейного пространства.
Задача 4. Матрица перехода при симметрии
Базис $b$получается из базиса
[{{a}_{1}}={{left( 2,1,3 right)}^{T}},quad {{a}_{2}}={{left( 1,1,-1 right)}^{T}},quad {{a}_{3}}={{left( 2,-1,-1 right)}^{T}}]
[begin{align}{{a}_{1}} &={{left( 2,1,3 right)}^{T}}, \ {{a}_{2}} &={{left( 1,1,-1 right)}^{T}}, \ {{a}_{3}} &={{left( 2,-1,-1 right)}^{T}} \ end{align}]
пространства ${{V}_{3}}$ симметрией относительно плоскости $2x+y+3z=0$. Найти матрицу перехода ${{T}_{ato b}}$.
Решение
Из курса аналитической геометрии мы знаем, что если плоскость задана уравнением
[ax+by+cz+d=0]
то вектор-нормаль $n$ имеет координаты
[n=left( a,b,c right)]
Тогда для плоскости $2x+y+3z=0$ нормаль имеет координаты $n=left( 2,1,3 right)$, что в точности совпадает с вектором ${{a}_{1}}$. Следовательно, при симметрии относительно плоскости этот вектор просто перейдёт в противоположный: ${{b}_{1}}=-{{a}_{1}}$.
Далее заметим, что векторы ${{a}_{2}}$ и ${{a}_{3}}$ лежат в плоскости симметрии, поскольку при подстановке их координат уравнение плоскости обращается в верное числовое равенство:
[begin{align}{{a}_{2}}={{left( 1,1,-1 right)}^{T}} &Rightarrow 2cdot 1+1+3cdot left( -1 right)=0 \ {{a}_{3}}={{left( 2,-1,-1 right)}^{T}} &Rightarrow 2cdot 2-1+3cdot left( -1 right)=0 \ end{align}]
[begin{align}{{a}_{2}}=&{{left( 1,1,-1 right)}^{T}}Rightarrow \ & Rightarrow 2cdot 1+1+3cdot left( -1 right)=0 \ {{a}_{3}}=&{{left( 2,-1,-1 right)}^{T}}Rightarrow \ & Rightarrow 2cdot 2-1+3cdot left( -1 right)=0 \ end{align}]
Следовательно, при симметрии эти векторы переходят сами в себя: ${{b}_{2}}={{a}_{2}}$, ${{b}_{3}}={{a}_{3}}$. Матрица перехода имеет вид
[{{T}_{ato b}}=left[ begin{array}{rcc} -1 & 0 & 0 \ 0 & 1 & 0 \ 0 & 0 & 1 \ end{array} right]]
Важное замечание. симметрия предполагает использование проекций и углов, что в конечном счёте сводится к скалярному произведению. Однако мы пока не знаем, что такое скалярное произведение в линейном пространстве.
Полноценное определение скалярного произведения будет намного позже — см. урок «Евклидово пространство». А пока будем считать, что скалярное произведение векторов $a$ и $b$ определено стандартным образом:
[left( a,b right)=left| a right|cdot left| b right|cdot cos alpha ]
Геометрическая интерпретация
Симметрию на плоскости и в пространстве удобно представлять графически. Пусть $alpha $ — плоскость, относительно которой выполняется симметрия. Тогда векторы $left{ {{a}_{1}},{{a}_{2}},{{a}_{3}} right}$ будут выглядеть так:

Из приведённого рисунка сразу видно, что при симметрии вектор ${{a}_{1}}$ перейдёт в противоположный, а векторы ${{a}_{2}}$ и ${{a}_{3}}$ останутся на месте.
Задача 5. Матрица поворота
Базис $e=left{ i,j,k right}$ пространства ${{V}_{3}}$ поворачивается на 180° вокруг прямой $l$, заданной системой
[left{ begin{align}x-y &=0 \ z &=0 \ end{align} right.]
Затем полученный базис $f$ поворачивается на 90° в отрицательном направлении вокруг нового положения вектора $j$. В результате получается базис $g=left{ {{i}_{2}},{{j}_{2}},{{k}_{2}} right}$.
Найдите матрицу перехода ${{T}_{eto g}}$. Найдите в базисе $e$ координаты вектора $h$, который в новом базисе $g$ имеет координаты $left( 1,1,1 right)$.
Решение
Вращение базиса и матрица поворота — это очень важная тема, по которой есть отдельный урок — «Матрица поворота». Но сейчас вращение совсем простое, поэтому обойдёмся без специальных матриц.
Вновь обратимся к геометрической интерпретации. Рассмотрим исходный базис $e=left{ i,j,k right}$ трёхмерного пространства:

Также на этом рисунке изображена прямая $l$, которая задаётся требованиями $z=0$ и $x=y$. Эта лежит в плоскости $Oxy$ и является биссектрисой первой координатной четверти.
Очевидно, что при повороте пространства на 180° относительно прямой $l$ базисные векторы $i$ и $j$ просто поменяются местами, а вектор $k$ перейдёт в противоположный:

Другими словами, ${{i}_{1}}=j$, ${{j}_{1}}=i$, ${{k}_{1}}=-k$, поэтому матрица перехода от базиса $e=left{ i,j,k right}$ к базису $f=left{ {{i}_{1}},{{j}_{1}},{{k}_{1}} right}$ примет вид
[{{T}_{eto f}}=left[ begin{array}{ccr} 0 & 1 & 0 \ 1 & 0 & 0 \ 0 & 0 & -1 \ end{array} right]]
Далее поворот осуществляется вокруг нового положения вектора $j$, т.е. вокруг вектора ${{j}_{1}}$. Вновь обратимся к чертежу. В этот раз нам уже не нужны координатные оси — нас интересуют лишь векторы ${{i}_{1}}$, ${{j}_{1}}$ и ${{k}_{1}}$, а также ось вращения:

Обратите внимание: в задаче сказано, что базис вращается на 90° в отрицательном направлении. Если мы смотрим на плоскость, образованную векторами ${{i}_{1}}$ и ${{k}_{1}}$, с вершины вектора ${{j}_{1}}$ (как на картинке), то отрицательное направление — это по часовой стрелке (отмечено зелёным), а положительное —против часовой стрелки (отмечено красным).
Все эти тонкости (положительное и отрицательное направление, правые и левые тройки векторов) детально описаны в уроке про матрицы поворота. Сейчас не будем подробно разбираться в них, а просто нарисуем результат:

Итак, ${{i}_{2}}={{k}_{1}}$, ${{j}_{2}}={{j}_{1}}$ и ${{k}_{2}}=-{{i}_{1}}$, поэтому матрица перехода от базиса $f=left{ {{i}_{1}},{{j}_{1}},{{k}_{1}} right}$ к базису $g=left{ {{i}_{2}},{{j}_{2}},{{k}_{2}} right}$ имеет вид
[{{T}_{fto g}}=left[ begin{array}{ccr} 0 & 0 & -1 \ 0 & 1 & 0 \ 1 & 0 & 0 \ end{array} right]]
Теперь мы можем найти матрицу ${{T}_{eto g}}$ через транзитный базис $f$:
[{{T}_{eto g}}={{T}_{eto f}}cdot {{T}_{fto g}}=left[ begin{array}{ccr} 0 & 1 & 0 \ 1 & 0 & 0 \ 0 & 0 & -1 \ end{array} right]cdot left[ begin{array}{ccr} 0 & 0 & -1 \ 0 & 1 & 0 \ 1 & 0 & 0 \ end{array} right]=left[ begin{array}{rcr} 0 & 1 & 0 \ 0 & 0 & -1 \ -1 & 0 & 0 \ end{array} right]]
[begin{align}{{T}_{eto g}} &={{T}_{eto f}}cdot {{T}_{fto g}}= \ &=left[ begin{array}{ccr} 0 & 1 & 0 \ 1 & 0 & 0 \ 0 & 0 & -1 \ end{array} right]cdot left[ begin{array}{ccr} 0 & 0 & -1 \ 0 & 1 & 0 \ 1 & 0 & 0 \ end{array} right]= \ &=left[ begin{array}{rcr} 0 & 1 & 0 \ 0 & 0 & -1 \ -1 & 0 & 0 \ end{array} right] end{align}]
Кроме того, нам известны координаты вектора $h$ в базисе $g$:
[h={{left( 1,1,1 right)}^{T}}]
Тогда в базисе $e$ координаты этого же вектора равны
[{{left[ h right]}_{e}}={{T}_{eto g}}cdot {{left[ h right]}_{g}}=left[ begin{array}{rcr} 0 & 1 & 0 \ 0 & 0 & -1 \ -1 & 0 & 0 \ end{array} right].left[ begin{matrix} 1 \ 1 \ 1 \ end{matrix} right]=left[ begin{array}{r} 1 \ -1 \ -1 \ end{array} right]]
[begin{align}{{left[ h right]}_{e}} &={{T}_{eto g}}cdot {{left[ h right]}_{g}}= \ &=left[ begin{array}{rcr} 0 & 1 & 0 \ 0 & 0 & -1 \ -1 & 0 & 0 \ end{array} right].left[ begin{matrix} 1 \ 1 \ 1 \ end{matrix} right]=left[ begin{array}{r} 1 \ -1 \ -1 \ end{array} right] end{align}]
Итак, мы нашли матрицу перехода ${{T}_{eto g}}$ и координаты вектора $h$ в исходном базисе. Задача решена.
Смотрите также:
- Критерий Сильвестра для квадратичных функций

- Работа с формулами в задаче B12
- Тест к уроку «Площади многоугольников на координатной сетке» (легкий)

- Показательные функции в задаче B15
- Задача B5: площадь кольца
- Случай четырехугольной пирамиды
|
Е.Б. Павельева, В.Я. Томашпольский. Линейная алгебра. |
||||||
|
λ |
= 0 |
|||||
|
1 |
+ λ2 |
= 0 |
||||
|
λ1 |
. Полученная СЛАУ имеет только тривиальное решение |
|||||
|
+ λ2 + λ3 = 0 |
||||||
|
λ1 |
||||||
|
λ |
+ λ |
2 |
+ λ |
+ λ |
4 |
= 0 |
|
1 |
3 |
λ1 = λ2 = λ3 = λ4 = 0 , т.е. система многочленов f1(t), f2 (t), f3 (t), f4 (t) линейно независима.
II способ. Найдем координаты многочленов в базисе 1, t, t 2 , t3 пространства
|
P : |
f |
1 |
(t) =t3 + t2 + t +1 = (1,1,1,1) , |
f |
2 |
(t) =t2 + t +1 = (1,1,1,0) , |
|||||||||||
|
3 |
|||||||||||||||||
|
f3 (t) =t +1 = (1,1,0,0) , |
f4 (t) =1 = (1,0,0,0) . Из столбцов координат многочленов |
||||||||||||||||
|
1 |
1 |
1 |
1 |
||||||||||||||
|
1 1 1 0 |
. Поскольку det A ≠ 0 |
, столбцы матрицы |
|||||||||||||||
|
составим матрицу A = |
|||||||||||||||||
|
1 |
1 |
0 |
0 |
||||||||||||||
|
0 |
0 |
0 |
|||||||||||||||
|
1 |
|||||||||||||||||
|
A линейно независимы, поэтому и система многочленов линейно |
|||||||||||||||||
|
независима. |
A |
n ×n |
|||||||||||||||
|
Задача 3. |
Доказать, |
что |
для |
любой матрицы |
размера |
||||||||||||
|
существует ненулевой многочлен |
p(x) такой, что |
p(A)= O , где O – нулевая |
|||||||||||||||
|
матрица размера |
n ×n . |
M n×n |
|||||||||||||||
|
Решение. |
Поскольку |
размерность |
пространства |
квадратных матриц |
|||||||||||||
|
равна n2 , |
любая система из n2 +1 |
матриц линейно зависима. В частности, |
|||||||||||||||
|
линейно |
зависима |
система |
матриц {E , A, A2 ,…, An2 |
. |
Следовательно, |
существует нетривиальная линейная комбинация этих матриц, равная
|
нулевой матрице: λ |
0 |
E + λ A + λ |
2 |
A2 |
+… + λ |
2 An2 |
=O . Таким образом, |
|||
|
1 |
n |
|||||||||
|
искомый многочлен имеет вид: |
p(x)= λ |
0 |
+ λ x + λ |
2 |
x2 |
+… + λ |
2 xn2 . |
|||
|
1 |
n |
|
Далее |
будем |
пользоваться матричными обозначениями. Базис |
|
e1 , e2 ,…,en |
удобно обозначать матрицей-строкой e = (e1 , e2 ,…,en ); |
|
|
координаты вектора |
x в базисе e1 , e2 ,…,en удобно обозначать матрицей – |
x1
столбцом X = x2 . В данных обозначениях разложение x по базису e :
xMn
x = x1e1 + x2e2 +… + xnen может быть записано в матричной форме x = e X .
11
|
Е.Б. Павельева, В.Я. Томашпольский. Линейная алгебра. |
|||||||||||||
|
Пусть |
e = (e1 , e2 ,…,en ) |
и f = (f1 , f2 ,…, fn ) |
– два базиса n -мерного |
||||||||||
|
линейного |
пространства |
L . |
Разложим |
векторы |
второго базиса f по |
||||||||
|
базису e : |
|||||||||||||
|
f1 =α11 e1 +α21 e2 +… +αn1 en |
, |
||||||||||||
|
f2 =α12 e1 +α22 e2 +… +αn2 en , |
(1) |
||||||||||||
|
L |
|||||||||||||
|
fn =α1n e1 +α2n e2 +… +αnn en . |
|||||||||||||
|
Коэффициенты |
αij |
этих |
разложений |
образуют |
матрицу |
||||||||
|
α11 |
α12 |
L α1n |
|||||||||||
|
T |
= |
α21 |
α22 |
L α2n , |
которая называется |
матрицей перехода от |
|||||||
|
e→ f |
L |
L |
L |
L |
|||||||||
|
αn1 |
|||||||||||||
|
αn2 L αnn |
|||||||||||||
|
базиса |
e к базису |
f . |
Отметим, |
что |
i -й столбец матрицы |
перехода, |
|||||||
|
i =1, 2,…, n , |
является столбцом координат вектора |
fi ( i -го вектора нового |
|||||||||||
|
базиса) |
относительно старого базиса e , т.е. матрица перехода состоит из |
||||||||||||
|
координат векторов нового базиса в старом, записанных по столбцам. |
|||||||||||||
|
Свойства матрицы перехода. |
|||||||||||||
|
1. |
Соотношения (1) можно записать компактно в матричном виде |
|
f = e Te→ f . |
(2) |
||||||
|
2. |
Матрица перехода квадратная и невырожденная и, следовательно, |
||||||
|
всегда имеет обратную. |
≠ 0 , т.к. векторы f1 , f2 ,…, fn линейно независимы. |
||||||
|
Действительно, |
detTe→ f |
||||||
|
3. |
Если T |
– матрица перехода от базиса |
e к базису |
f , то обратная |
|||
|
матрица |
T −1 является |
матрицей |
перехода от |
базиса |
f к базису e . |
||
|
Действительно, |
учитывая |
соотношение |
(2), |
получим |
|||
|
e = f T |
f →e |
= f T −1 |
. |
||||
|
e→ f |
4. Te→g =Te→ f Tf →g .
Действительно, т.к. g = e Te→g , f = e Te→ f , g = f Tf →g , следовательно,
g = e Te→g = f Tf →g = e Te→ f Tf →g . Таким образом, Te→g =Te→ f Tf →g .
Теорема. Пусть X e матрица-столбец координат вектора x в базисе e , X f матрица-столбец координат вектора x в базисе f , Te→ f – матрица перехода от базиса e к базису f . Координаты вектора x в базисах e и f
связаны между собой соотношением
|
X e =Te→ f X f . |
(3) |
|
|
Задача 1. |
Найти матрицу перехода от базиса |
e = (i, j,k) к базису |
|
f = ( f1, f2 , f3 ) |
в пространстве V3 . f1 = j, f2 = k, f3 = i . |
12
|
Е.Б. Павельева, В.Я. Томашпольский. Линейная алгебра. |
||||||
|
Решение. |
Найдем координаты векторов f1 , f2 , f3 в базисе e : f1 = (0,1,0) , |
|||||
|
f2 = (0,0,1) , |
f3 = (1,0,0) . Из столбцов координат векторов составим матрицу |
|||||
|
0 |
0 |
1 |
||||
|
1 |
0 |
0 |
. Данная матрица A и есть матрица перехода от базиса e |
к |
||
|
A = |
||||||
|
0 |
1 |
0 |
||||
|
базису |
f . |
|||||||||||||||||||||||||||||||||
|
Задача 2. |
В пространстве V3 заданы векторы |
f1 = i + j , |
f2 = i − j , |
|||||||||||||||||||||||||||||||
|
f3 = −i + 2 j − k . |
Доказать, что система векторов |
f |
= ( f1 , f2 , f3 ) |
образует |
||||||||||||||||||||||||||||||
|
базис в V3 и написать матрицу перехода от |
базиса |
e = (i, j,k) |
к базису |
f . |
||||||||||||||||||||||||||||||
|
Найти координаты вектора x = i − 2 j + 2k в базисе |
f . |
|||||||||||||||||||||||||||||||||
|
Решение. а) |
Найдем координаты векторов |
f1 , f2 , f3 |
в базисе e : f1 = (1,1,0) , |
|||||||||||||||||||||||||||||||
|
f2 = (1,−1,0) , |
f3 = (−1,2,−1) . |
Из столбцов |
координат |
векторов |
составим |
|||||||||||||||||||||||||||||
|
1 |
1 |
−1 |
||||||||||||||||||||||||||||||||
|
матрицу |
A = |
1 |
−1 |
2 |
. Поскольку det A ≠ 0 , система векторов |
f1 , f2 , f3 |
||||||||||||||||||||||||||||
|
0 0 −1 |
V3 , т.к. |
|||||||||||||||||||||||||||||||||
|
линейно независима. Эта система образует базис в пространстве |
||||||||||||||||||||||||||||||||||
|
количество векторов в системе совпадает с размерностью пространства V3 . |
||||||||||||||||||||||||||||||||||
|
б) |
Матрица |
A и есть матрица перехода от базиса e |
в базис |
f . (1,−2,2) – |
||||||||||||||||||||||||||||||
|
координаты |
вектора |
x |
в базисе |
e = (i, j,k) , |
(x1, x2 , x3 ) – координаты |
x в |
||||||||||||||||||||||||||||
|
1 |
x |
|||||||||||||||||||||||||||||||||
|
базисе |
f |
1 |
. Подставив матрицы |
X e , |
||||||||||||||||||||||||||||||
|
= ( f1 , f2 , f3 ) , т.е. X e = − 2 |
, X f |
= x2 |
||||||||||||||||||||||||||||||||
|
2 |
x |
|||||||||||||||||||||||||||||||||
|
X f , |
A |
3 |
||||||||||||||||||||||||||||||||
|
в формулу (3), |
получим СЛАУ, |
записанную в матричном виде: |
||||||||||||||||||||||||||||||||
|
1 |
1 1 |
−1 x |
||||||||||||||||||||||||||||||||
|
− 2 |
1 |
−1 |
2 |
1 |
. Решив |
эту систему |
методом |
Гаусса, |
получим |
|||||||||||||||||||||||||
|
= |
x2 |
|||||||||||||||||||||||||||||||||
|
2 |
0 0 |
−1 x |
||||||||||||||||||||||||||||||||
|
3 |
||||||||||||||||||||||||||||||||||
|
x |
= |
1 , |
x |
2 |
= − |
3 |
, |
x = −2 . |
Таким |
образом, |
вектор |
x |
в |
базисе |
f |
имеет |
||||||||||||||||||
|
1 |
2 |
2 |
3 |
|||||||||||||||||||||||||||||||
|
координаты |
x = (1 |
,− |
3 |
,− 2). |
||||||||||||||||||||||||||||||
|
2 |
||||||||||||||||||||||||||||||||||
|
2 |
f (t) =t 2 +1, |
|||||||||||||||||||||||||||||||||
|
Задача 3. |
Доказать, |
что |
система |
многочленов |
||||||||||||||||||||||||||||||
|
(t) = −t2 + 2t , |
(t) =t2 −t |
1 |
||||||||||||||||||||||||||||||||
|
f |
2 |
f |
3 |
образует базис |
в |
пространстве |
P . |
Найти |
||||||||||||||||||||||||||
|
2 |
координаты многочлена g(t) = −2t 2 + t −1 в этом базисе.
Решение. а) Найдем координаты заданных многочленов в естественном
|
базисе |
e = (1,t,t2 ) |
пространства |
P : |
f |
1 |
(t) =t2 |
+1 = (1,0,1) , |
|
2 |
|||||||
|
f2 (t) = −t2 + 2t = (0,2,−1) , |
f3 (t) =t2 −t = (0,−1,1) . |
Из столбцов |
координат |
13
|
Е.Б. Павельева, В.Я. Томашпольский. Линейная алгебра. |
|||||||
|
1 |
0 |
0 |
|||||
|
многочленов |
составим матрицу |
0 |
2 |
. Линейная независимость |
|||
|
A = |
−1 |
||||||
|
1 |
−1 |
1 |
|||||
|
многочленов эквивалентна линейной независимости столбцов матрицы A. |
|||||||
|
Поскольку |
det A ≠ 0 , столбцы |
матрицы |
A |
линейно независимы, |
следовательно, и система многочленов линейно независима. Поскольку количество линейно независимых многочленов совпадает с размерностью пространства P2 , эти многочлены образуют базис в пространстве P2 .
|
б) Матрица A является матрицей |
перехода от |
базиса |
e |
к базису |
f . |
||||||||||||||||||||||||||||
|
Многочлен |
g(t) = −2t2 + t −1 |
имеет |
координаты (−1,1,−2) |
в |
естественном |
||||||||||||||||||||||||||||
|
базисе |
e = (1,t,t2 ) |
и координаты (x , x |
2 |
, x |
) |
в базисе |
f = ( f (t), f |
2 |
(t), f |
3 |
(t)) , |
||||||||||||||||||||||
|
−1 |
x |
1 |
3 |
1 |
|||||||||||||||||||||||||||||
|
т.е. |
1 |
1 |
Пользуясь |
формулой |
(3), |
получим |
систему |
||||||||||||||||||||||||||
|
Ge = |
, |
G f = x2 |
. |
||||||||||||||||||||||||||||||
|
− 2 |
x3 |
||||||||||||||||||||||||||||||||
|
−1 |
1 0 |
0 |
x |
||||||||||||||||||||||||||||||
|
1 |
0 |
2 |
1 |
x1 |
= −1, |
x2 = 0 , |
x3 = −1 |
– |
решение |
системы. |
|||||||||||||||||||||||
|
= |
−1 |
x2 |
. |
||||||||||||||||||||||||||||||
|
− 2 |
1 |
−1 1 |
x |
||||||||||||||||||||||||||||||
|
3 |
g(t) |
f |
|||||||||||||||||||||||||||||||
|
Таким |
образом, |
многочлен |
в |
базисе |
имеет |
координаты |
|||||||||||||||||||||||||||
|
g(t) = (−1,0, −1). |
|||||||||||||||||||||||||||||||||
|
Замечание. |
Координаты |
многочлена |
g(t) = −2t2 + t −1 |
в |
базисе |
f |
|||||||||||||||||||||||||||
|
можно |
найти |
вторым |
способом. |
Разложим |
многочлен |
по |
базису |
||||||||||||||||||||||||||
|
g(t) = λ1 f1(t) + λ2 f2 (t) + λ3 |
f3 (t) |
t (−∞,+∞) . |
Подставив |
в |
равенство |
||||||||||||||||||||||||||||
|
многочлены f1(t), |
f2 (t), f3 (t) и приведя подобные члены, получим |
||||||||||||||||||||||||||||||||
|
− 2t2 + t −1 = λ (t2 +1) + λ |
2 |
(−t2 + 2t) + λ (t2−t) |
t (−∞,+∞) |
||||||||||||||||||||||||||||||
|
1 |
3 |
||||||||||||||||||||||||||||||||
|
t 2 (−2 − λ + λ |
2 |
− λ ) |
+ t |
(1 − 2λ |
2 |
+ λ |
) + (−1 − λ ) ≡ 0 |
t (−∞,+∞) . |
|||||||||||||||||||||||||
|
1 |
3 |
3 |
1, t , t2 |
1 |
|||||||||||||||||||||||||||||
|
Поскольку |
система |
многочленов |
линейно |
независима, |
только |
тривиальная линейная комбинация этих многочленов может быть
|
тождественно равна нулю. Приравнивая коэффициенты |
при t 2 , t, 1 |
к нулю, |
||||
|
− 2 |
− λ1 + λ2 − λ3 = 0 |
|||||
|
+ λ3 = 0 |
. λ1 = −1, λ2 = 0 , |
λ3 = −1 |
– решение |
|||
|
получим СЛАУ 1 − 2λ2 |
||||||
|
−1 |
− λ |
= 0 |
||||
|
1 |
g(t) = (−1,0,−1) в базисе f . |
|||||
|
системы. Следовательно, |
||||||
|
Задача 4. Два базиса f = ( f1 , f2 , f3 ) и g = (g1 , g2 , g3 ) в |
R3 |
заданы |
||||
|
своими координатами в некотором третьем базисе e |
в R3 . |
f 1 = (1,1,0) , |
||||
|
f 2 = (1,0,1) , f 3 = (0,1,1) , g1= (1,1,1) , |
g2 = (1,2,0) , g3 = (−1,0,0) . Вектор |
x задан |
14
Е.Б. Павельева, В.Я. Томашпольский. Линейная алгебра.
|
координатами в базисе |
g : |
x = ( |
3 |
,−2,3) . Найти координаты вектора x в |
||||
|
базисе f . |
2 |
|||||||
|
1 |
1 |
0 |
||||||
|
I способ. Te→ f |
1 |
0 |
1 |
– матрица перехода от e к f . Для того чтобы |
||||
|
= |
||||||||
|
0 |
1 |
1 |
||||||
|
найти матрицу перехода от f |
к g , |
надо найти координаты векторов базиса |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
g |
в базисе |
f . |
Найдем |
координаты |
g1 |
в |
базисе |
f . |
Вектор g1 |
имеет |
|||||||||||||||||||||||||||||||||||||||||||||||
|
координаты |
(1,1,1) |
в базисе e и координаты |
(x1, x2 , x3 ) |
в базисе |
f , |
т.е. |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
1 |
x |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
G1 |
G1 |
1 |
Воспользовавшись |
формулой |
(3) |
G1 |
=Te→ f G1 |
, |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
e |
= 1 , |
f |
= x2 |
. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
e |
f |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1 |
x3 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1 1 1 0 x |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
получим |
СЛАУ |
1 |
= |
1 |
0 |
1 |
x |
1 |
. |
x |
= 1 , |
x |
= 1 , |
x |
= 1 |
– решение |
|||||||||||||||||||||||||||||||||||||||||
|
2 |
2 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1 |
2 |
2 |
3 |
2 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
0 1 1 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1 |
x3 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
системы. Таким образом, |
вектор |
g1 |
в |
базисе |
f |
имеет |
координаты |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
g1 = (12 , 12 , 12 ). |
Аналогично найдем координаты g2 в базисе |
f , решив систему |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1 1 1 0 x |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2 |
1 |
0 |
1 |
1 |
и |
координаты |
g3 |
в |
базисе |
f , |
решив систему |
||||||||||||||||||||||||||||||||||||||||||||||
|
= |
x2 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
0 |
0 1 1 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
x3 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
−1 1 1 0 x |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
0 |
1 |
0 |
1 |
1 |
Вектор |
g2 |
в |
базисе |
f |
имеет |
координаты |
||||||||||||||||||||||||||||||||||||||||||||||
|
= |
x2 |
. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
0 |
0 1 1 |
x |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
g2 = ( |
3 |
,−12 , 12 ), |
вектор g3 |
в |
базисе |
f |
имеет |
координаты |
g3 = (− 12 ,−12 , 12 ). |
||||||||||||||||||||||||||||||||||||||||||||||||
|
2 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1 |
3 |
− |
1 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2 |
2 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Матрица перехода от |
f |
к g имеет вид: |
T |
f →g |
= |
1 |
− |
1 |
− |
1 |
. Чтобы найти |
||||||||||||||||||||||||||||||||||||||||||||||
|
12 |
1 |
2 |
1 |
2 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
x |
f , |
2 |
2 |
2 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
координаты |
вектора |
в базисе |
опять |
воспользуемся |
формулой |
(3): |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
1 |
3 |
− |
1 |
3 |
− |
15 |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
2 |
2 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2 |
2 |
4 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
X |
f |
=T |
f |
→g |
X |
g |
= |
1 |
− |
1 |
− |
1 |
− 2 |
= |
1 |
. Таким образом, |
вектор |
x |
в |
||||||||||||||||||||||||||||||||||||||
|
12 |
1 |
2 |
1 |
2 |
3 |
54 |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
2 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2 |
2 |
4 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
базисе |
f |
имеет координаты |
x = (− 15 , 1 , |
5 |
). |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4 |
4 |
15
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Координаты вектора в базисе
В системе векторов a1, a2, a3, a4 найти любую подсистему векторов, которые образуют базис, разложить векторы по базису, перейти к другому базису, найти коэффициенты разложения векторов во втором базисе; в обоих случаях определить обратные матрицы, соответствующие векторам базиса. Правильность вычисления в каждом случае проверить с помощью умножения вектора слева на матрицу, обратную матрице вектора базиса.
Пример №2 . В системе векторов a1, a2, a3, a4 найти любую подсистему векторов, которые образуют базис, разложить векторы по базису, перейти к другому базису, найти коэффициенты разложения векторов во втором базисе; в обоих случаях определить обратные матрицы, соответствующие векторам базиса. Правильность вычисления в каждом случае проверить с помощью умножения вектора слева на матрицу, обратную матрице вектора базиса.
a1=(1;5;3), a2=(2;1;-1), a3=(4;2;1), a4=(17;13;4).
4.3.3 Формулы перехода от одного базиса к другому
Очевидно, что в одном и том же пространстве можно выбрать множество базисов. Пусть в  выбрано два базиса
выбрано два базиса  и
и  .
.
Векторы базиса  могут быть выражены через векторы базиса
могут быть выражены через векторы базиса  :
:
 (4)
(4)
Матрица  называется матрицей перехода от базиса к базису . В ее столбцах записаны координаты векторов
называется матрицей перехода от базиса к базису . В ее столбцах записаны координаты векторов  относительно базиса
относительно базиса  .
.
Соотношения (4) называются формулами перехода от базиса к базису . Их можно записать в матричной форме:
 , отсюда
, отсюда  .
.
Пусть вектор  задан своими координатами относительно базиса –
задан своими координатами относительно базиса –  , а относительно базиса –
, а относительно базиса –  . Тогда
. Тогда
 и
и  . (5)
. (5)
Пример 4. Относительно базиса  ,
,  ,
,  даны четыре вектора
даны четыре вектора  ,
,  ,
,  и
и  . Векторы
. Векторы  можно принять за базис в
можно принять за базис в  . Найти координаты вектора в базисе
. Найти координаты вектора в базисе  .
.
Решение. Матрица перехода от базиса  к базису имеет вид
к базису имеет вид  . Обозначим координаты вектора в базисе через
. Обозначим координаты вектора в базисе через  . Согласно формулам (5), имеем:
. Согласно формулам (5), имеем:
 . Находим
. Находим  :
:  ;
;
 ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;
 .
.
Проверка:  ;
;
 ;
;
 или
или  .
.
Анал_Геом / Изменение координат вектора при изменении базиса
Пусть в  -мерном линейном пространстве
-мерном линейном пространстве  выбран базис
выбран базис  , который мы будем для удобства называть «старый» и другой базис
, который мы будем для удобства называть «старый» и другой базис  , который мы будем называть «новый». Возьмем призвольный вектор
, который мы будем называть «новый». Возьмем призвольный вектор  из
из  . Его координатный столбец в старом базисе обозначим
. Его координатный столбец в старом базисе обозначим  , а в новом —
, а в новом —  . Нам нужно выяснить, как связаны друг с другом координаты в старом и в новом базисе. Для этого нам сначала нужно «связать» друг с другом старый и новый базисы. Запишем разложения новых базисных векторов по старому базису
. Нам нужно выяснить, как связаны друг с другом координаты в старом и в новом базисе. Для этого нам сначала нужно «связать» друг с другом старый и новый базисы. Запишем разложения новых базисных векторов по старому базису

Составим матрицу, столбцами которой служат координатные столбцы векторов нового базиса

Эта матрица называется матрицей перехода от старого базиса к новому.
Замечание 18.1 Матрица перехода всегда невырождена, то есть  .
.
Предложение 18.5 Координатные столбцы в старом базисе и в новом базисе связаны формулой

где справа стоит произведение матрицы перехода  на матрицу-столбец.
на матрицу-столбец.
Доказательство. Так как  — координатный столбец вектора
— координатный столбец вектора  в новом базисе, то
в новом базисе, то

Заменив векторы  их разложениями по старому базису, получим
их разложениями по старому базису, получим

В силу предложения 14.3 изменим порядок суммирования
Здесь мы получили разложение вектора  по старому базису, причем координата вектора с номером
по старому базису, причем координата вектора с номером  равна
равна  . Элемент с номером
. Элемент с номером  столбца
столбца  будет иметь такой же вид. Следовательно, формула (18.1) доказана.
будет иметь такой же вид. Следовательно, формула (18.1) доказана.
Пример 18.4 Пусть  , то есть
, то есть  — трехмерное векторное пространство. Пусть задан ортонормированный базис i, j, k. Выберем другой (новый) базис
— трехмерное векторное пространство. Пусть задан ортонормированный базис i, j, k. Выберем другой (новый) базис

Возьмем вектор  . Найдем его координаты в новом базисе.
. Найдем его координаты в новом базисе.
Выпишем матрицу перехода, ее столбцы — это координаты новых базисных векторов

Пусть  — координатный столбец вектора
— координатный столбец вектора  в новом базисе. Тогда
в новом базисе. Тогда

Найдем матрицу  по формуле (14.14). Находим определитель
по формуле (14.14). Находим определитель

Находим алгебраические дополнения


Находим координаты вектора

Таким образом, новые координаты вектора  :
:  ,
,  ,
,  ,
,  .
.
Тот же самый результат можно было получить, записав формулу (18.2) в виде системы уравнений

Решив эту систему, например, методом Гаусса, найдем новые координаты  ,
,  ,
,  .
.
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
В линейном пространстве все базисы равноправны. Тот или иной базис выбирают исходя из конкретных обстоятельств, а может быть, и вообще произвольно. Иногда удобно использовать для представления элементов линейного пространства несколько базисов, но тогда естественным образом возникает задача преобразования координат векторов, которое связано с изменением базиса.
Пусть в n-мерном линейном пространстве L заданы два базиса: старый b = (b1 … bn) и новый с = (с1 … сn). Любой вектор можно разложить по базису Ь. В частности, каждый вектор из базиса с может быть представлен в виде линейной комбинации векторов базиса b:
ci = α1ib1 + … + αnibn, i = 1,n.
Запишем эти представления в матричной форме:
или
c = bU,
где
Определение 1.6. Матрицу (1.7) называют матрицей перехода от старого базиса b к новому базису с.
Согласно данному определению, i-й столбец матрицы пе-рехода есть столбец координат i-го вектора нового базиса в старом. Поэтому говорят, что матрица перехода состоит из координат векторов нового базиса в старом, записанных по столбцам.
Обсудим некоторые свойства матрицы перехода.
1°. Матрица перехода невырождена и всегда имеет обратную.
◄ Действительно, столбцы матрицы перехода — это столбцы координат векторов нового базиса в старом. Следовательно, они, как и векторы базиса, линейно независимы. Значит, матрица U невырожденная и имеет обратную матрицу U-1 [III]. ►
2°. Если в n-мерном линейном пространстве задан базис b, то для любой невырожденной квадратной матрицы U порядка п существует такой базис с в этом линейном пространстве, что U будет матрицей перехода от базиса b к базису с.
◄ Из невырожденности матрицы U следует, что ее ранг равен n, и поэтому ее столбцы, будучи базисными, линейно независимы. Эти столбцы являются столбцами координат векторов системы с = bU. Линейная независимость столбцов матрицы U равносильна линейной независимости системы векторов с. Так как система с содержит n векторов, причем линейное пространство n-мерно, то, согласно теореме 1.4, эта система является базисом. ►
Пример 1.15. Пусть b = (b1 b2 b3) — базис линейного пространства. Тогда система векторов c1 = 2b1, c2 = — b2, c3 = b3 тоже является базисом в этом линейном пространстве. Это следует из того, что
(c1 c2 c3) = (b1 b2 b3)U,
где диагональная матрица U = diag(2, -1, 1) невырождена.
3°. Если U — матрица перехода от старого базиса b к новому базису с линейного пространства, то U-1 — матрица перехода от базиса с к базису b.
◄ Матрица U невырождена, и поэтому из равенства с = bU следует, что cU-1 = b. Последнее равенство означает, что столбцы матрицы U-1 являются столбцами координат векторов базиса b относительно базиса с, т.е., согласно определению 1.6, U-1 — это матрица перехода от базиса с к базису b. ►
4°. Если в линейном пространстве заданы базисы b, с и d, причем U — матрица перехода от базиса b к базису с, а V — матрица перехода от базиса с к базису d, то произведение этих матриц UV — матрица перехода от базиса b к базису d.
◄ Согласно определению 1.6 матрицы перехода, имеем равенства
с = bU, d = cV,
откуда
d = cV = (bU)V = b(UV),
т.е. UV — матрица перехода от базиса b к базису d. ►
Рассмотрим теперь, как преобразуются координаты про-извольного вектора в линейном пространстве при переходе от старого базиса к новому. Выберем произвольный вектор х ∈ L и разложим его в старом базисе:
Разложение того же вектора в новом базисе имеет вид
Найдем связь между старыми координатами х вектора х и новыми его координатами х’. Из соотношений (1.8), (1.9) следует, что bх = сх’. Учитывая, что с = bU, получаем bх = (bU)x’, или bх = b(Ux’). Последнее равенство можно рассматривать как запись двух разложений одного и того же вектора х в данном базисе b. Разложениям соответствуют столбцы координат х и Ux’, которые, согласно теореме 1.2 о единственности разложения вектора по базису, должны быть равны:
x = Ux’, или х’ = U-1x.
Итак, чтобы получить координаты вектора в старом базисе, необходимо столбец координат этого вектора в новом базисе умножить слева на матрицу перехода из старого базиса в новый. Матрица перехода из старого базиса в новый позволяет пересчитывать новые координаты в старые.
Пример 1.16. Рассмотрим в V2 ортонормированный базис b = (i j) из векторов i, j. Обозначим через е = (e1 е2) новый базис, который получается поворотом старого базиса b на заданный угол φ. Исходя из заданного угла поворота мы можем найти координаты векторов e1, e2 нового базиса относительно старого (рис. 1.2):

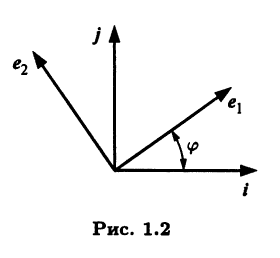
Эти разложения позволяют составить матрицу перехода U из старого базиса b в новый е, а также обратную матрицу:

Найденные матрицы перехода U (из старого базиса в новый) и U-1 (из нового базиса в старый) позволяют записать соотношения между старыми х1, х2 и новыми х’1, х’2 координатами произвольного вектора x из V2:
x’1 = x1cosφ + x2sinφ x1 = x’1cosφ + x’2sinφ
x’2 = -x1sinφ + x2cosφ x2 = x’1sinφ + x’2cosφ .
Например, вектор x = i + j в старом базисе имеет координаты х1 = 1, x2 = 1, а в новом базисе — х’1 = cosφ + sinφ, х’2 = — sinφ + соsφ.
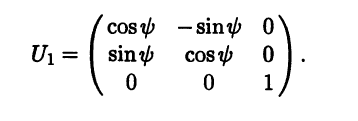
Пример 1.17. Пусть в линейном пространстве V3 заданы два правых ортонормированных базиса: старый (i j к) и новый (i’ j’ k’). Тогда старый базис можно преобразовать в новый при помощи трех поворотов вокруг координатных осей прямоугольной системы координат, определяемой ортонормированным базисом.
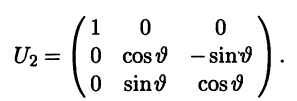
Рассмотрим единичный вектор s, который одновременно лежит в плоскостях пар векторов i, j и i’ ,j’. Повернем базис (i j к) вокруг оси вектора k на некоторый угол ψ так, что вектор i совпадет с вектором s. Отметим, что вектор s ортогонален и вектору k, и вектору k’, так как является линейной комбинацией и пары i, j, и пары i’, j’. Значит, поворотом вокруг оси вектора s на некоторый угол ϑ можно добиться совмещения вектора k с вектором k’. Наконец, поворотом вокруг оси вектора k’ на некоторый угол φ совместим вектор s с вектором i’ (рис. 1.3).
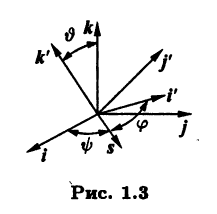
Матрица перехода, соответствующая первому повороту вокруг оси вектора k, имеет вид
Матрица перехода А2, соответствующая повороту уже нового базиса вокруг оси вектора s на угол ϑ, похожа на предыдущую:
Наконец, матрица перехода, соответствующая третьему повороту вокруг оси вектора k’ имеет вид
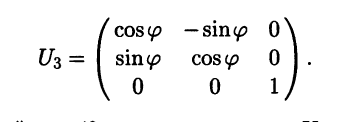
Согласно свойству 4°, матрица перехода U из старого базиса (i j k) в новый базис (i’ j’ k’) равна U = U1U2U3 и может быть записана в виде

Дополнение 1.1. Линейное пространство над полем Р
Мы ввели понятие линейного пространства как множества произвольной природы, на котором заданы две операции: сложение элементов множества и умножение элемента множества на число. Согласно замечанию 1.1, под числами можно понимать как действительные числа, так и комплексные. Обе операции должны подчиняться аксиомам линейного пространства, при этом происхождение этих операций совершенно несущественно.
Этот подход можно развивать, давая понятию «число» расширительное толкование. Само понятие числа характеризуется в первую очередь тем, что над числами можно выполнять четыре арифметические операции. Если наличие четырех арифметических операций взять за основу, мы придем к алгебраической структуре, называемой полем. Напомним, что в самом широком толковании алгебраическая структура (алгебраическая система) — это некоторое множество, на котором задана одна или несколько алгебраических операций, подчиняющихся некоторому набору аксиом. Алгебраическая операция (внутренний закон композиции, [I-4.1]) на множестве X — это такой закон, или правило, который любому упорядоченному набору x1,…, хn элементов множества X (операндов) ставит в соответствие единственный элемент того же множества (результат этой операции). Наиболее распространены бинарные алгебраические операции, имеющие два операнда (т.е. n = 2).
Определение 1.7. Полем называют множество Р произвольной природы, на котором заданы две бинарные алгебраические операции, условно сложение (+) и умножение (•), подчиняющиеся следующим аксиомам поля:
а) сложение коммутативно: а + b = b + а;
б) сложение ассоциативно: (а + b) + с = а + (b + с);
в) существует такой элемент 0 ∈ Р (нулевой элемент, или нуль), что а + 0 = а для любого элемента a ∈ Р;
г) каждый элемент a ∈ Р имеет противоположный (симметричный) элемент (-а), такой, что а + (-а) = 0;
д) умножение коммутативно: а • b = b • а;
е) умножение ассоциативно: (а • b) • с = а • (b • с);
ж) существует такой элемент е ∈ Р (единичный), что а • e = а для любого а ∈ Р;
з) каждый элемент а ∈ Р, а ≠ 0, имеет обратный элемент а-1, такой, что а • а-1 = е;
и) умножение дистрибутивно относительно сложения: (а + b) • с = (а • с) + (b • с).
Отметим, что первые четыре аксиомы поля, относящиеся к операции сложения, совпадают с соответствующими аксиомами линейного пространства. Так же как и в линейном пространстве, исходя из аксиом в) и г) строим операцию вычитания, полагая, например, что, по определению,
а — b = а + (-b).
Аксиомы ж) и з), относящиеся к умножению, аналогичны аксиомам в) и г). Они позволяют определить операцию деления:
а/Ь = а • b-1, b ≠ 0.
Сложение и умножение задаются в поле априори, их называют основными операциями, а вычитание и деление, которые базируются на свойствах основных операций, называют дополнительными операциями.
Аксиомы поля позволяют с его элементами оперировать так же, как и с числами. Сохраняются основные правила пре-образования выражений. В записи выражений используют те же соглашения, что и в записи числовых выражений. Знак операции умножения опускают, если сомножители обозначены буквами, т.е. вместо а • b пишут ab. В выражениях действует приоритет операций умножения и деления по отношению к сложению и вычитанию. Если в выражении записаны несколько операций подряд, то сперва выполняются более приоритетные операции. Операции одного приоритета выполняются в порядке слева направо. Например, в выражении a + bc — d/f сперва следует операция умножения bс, затем деления d/f, затем сложения, последней выполняется операция вычитания.
Операция умножения на число в линейном пространстве на самом деле не опирается на специфические свойства дей-ствительных чисел. Важно лишь, что числа можно умножать (используется в аксиомах д) и е) линейного пространства) и складывать (аксиома ж)). Операция сложения вообще оперирует только элементами линейного пространства. Поэтому можно, опираясь на то же определение 1.1, ввести линейное пространство над произвольным полем Р. Такое линейное пространство определяют как множество произвольной природы, на котором заданы две операции: сложение, подчиняющееся аксиомам а)-г) линейного пространства, и умножение элементов линейного пространства на элементы поля Р, подчиняющееся аксиомам д)-з) линейного пространства.
В качестве поля Р чаще всего рассматривают поле действительных чисел R и поле комплексных чисел С. Это объясняет введенную ранее терминологию (» линейное пространство над полем действительных чисел «, «линейное пространство над полем комплексных чисел», см. замечание 1.1).
Пример 1.18. Рассмотрим однородную СЛАУ
с комплексными коэффициентами. Множество ее решений представляет собой комплексное линейное пространство. Размерность и базис этого пространства мы определим, если найдем фундаментальную систему решений этой СЛАУ. Решаются системы с комплексными коэффициентами по той же схеме, что и СЛАУ с действительными коэффициентами. Записываем матрицу СЛАУ и при помощи элементарных преобразований строк приводим ее к ступенчатому виду. Чтобы упростить вычисления, используем умножение строк на комплексные числа, сопряженные к элементам первого столбца:
Видим, что ранг матрицы СЛАУ равен двум, а значит, линейное пространство решений одномерно. В качестве базис-ных неизвестных можно взять х1, x2, тогда х3 — свободное неизвестное. Полагая х3 = 1, находим x2 = 1, х1 = 2. Таким образом, фундаментальная система решений рассматриваемой СЛАУ имеет один вектор x(1) = (2 1 1)T , а общее решение имеет вид
где С — произвольное комплексное число. #
Далее мы будем рассматривать линейные пространства только над полем действительных чисел.
Вопросы и задачи
- Может ли линейное пространство состоять из: а) двух элементов; б) одного элемента; в) 100 элементов?
- Выясните, образует ли линейное пространство:
- Пусть множество М состоит из одного элемента а. Определим операции сложения и умножения на действительное число α соответственно равенствами: а + а = а, αа = а. Является ли М линейным пространством?
- Предположим, что множество М состоит из всевозможных упорядоченных пар действительных чисел x = (α1,α2). Пусть на этом множестве заданы следующие операции: а) если
x = (α1,α2), у = (β1,β2), то x + у = (α1 + β1, α2 + β2); б) если γ ∈ R и х ∈ М, то γx = (γα1,α2). Является ли М линейным пространством? - Является ли линейным пространством множество всех действительных чисел, если операции сложения ⊕ и умножения
 на число ввести следующим образом: x ⊕ у = x + у, a x = |а|x?
на число ввести следующим образом: x ⊕ у = x + у, a x = |а|x? - Докажите, что множество матриц-столбцов высоты n образует линейное пространство относительно матричных операций сложения и умножения.
- В линейном пространстве V3 заданы три вектора
- Пусть в линейным пространстве L задана линейно независимая система из п векторов. При каких условиях можно утверждать, что dimL = n?
- Докажите, что dimV2 = 2, dimV3 = 3
- Найдите размерность линейного пространства, состоящего из решений системы линейных однородных уравнений [III]. Как связаны между собой понятия: а) базис и фундаментальная система решений; б) размерность линейного пространства решений и ранг матрицы системы?
- Векторы a1, a2, а3, a4 линейного пространства L заданы своими координатами в некотором базисе:
- Выясните, образуют ли векторы
- Найдите координаты вектора х в базисе е = (e1 е2 е3), если известны его координаты (-1 4 3)T в базисе b = (b1 b2 b3), а базисы связаны соотношениями
- В линейном пространстве две системы векторов b = (b1 b2 b3) и е = (e1 е2 е3) заданы своими координатами в некотором базисе:
- Найдите размерность dimMnm(R) линейного пространства матриц типа m×n с элементами из R.
- Является ли матрица
- Какой вид имеет матрица перехода от старого базиса к новому, если матрица перехода от нового базиса к старому является: а) треугольной; б) симметрической; в) кососимметрической?
- Может ли в пространстве V3 матрица перехода быть кососимметрической?
- При каких условиях векторы а, b, a×b в пространстве V3 образуют базис?
- Докажите, что в линейном пространстве Кn[х] многочлены (x — a)k, k = 0,n, а = const, образуют базис. Найти координаты произвольно взятого многочлена р(х) ∈ Кn[х] в этом базисе.
а) множество всех векторов данной плоскости, не парал-лельных данной прямой, относительно линейных операций над векторами;
б) множество всех векторов плоскости с началом в начале системы координат, расположенных в правой полуплоскости, относительно обычных операций сложения и умножения векторов;
в) множество кососимметрических матриц третьего порядка относительно операции сложения матриц и умножения матрицы на число;
г) множество функций вида acost + bsint, t ∈ (- ∞,∞), a,b ∈ R, относительно обычных операций сложения функций и умножения функции на число;
д) множество многочленов степени п относительно обычных операций сложения многочленов и умножения многочлена на число.
 на число ввести следующим образом: x ⊕ у = x + у, a
на число ввести следующим образом: x ⊕ у = x + у, a a1 = {l;4;3}, a2 = {3;3;2}, a3 = {8;1;3}.
Выясните, является ли система этих векторов линейно зависи-мой. Если система линейно зависима, то найдите зависимость между векторами (нулевую нетривиальную линейную комбинацию этих векторов).

Является ли система этих векторов линейно зависимой? Дайте ответ, не проводя вычислений.
a1 = (1, 0, 0, 0), a2 = (1, 1, 0, 0),
a3 = (1, 1, 1, 0), a4 = (1, 1, 1, 1)
базис в линейном арифметическом пространстве R4?

Докажите, что эти системы являются базисами. Найдите: а) матрицу U = Рbe перехода от базиса b к базису е; б) матрицу Рeb обратного перехода от базиса е к базису b; в) координаты вектора е2 в обоих базисах; г) координаты вектора х = -3b1 — 5b2 + 2b3 в базисе е.
матрицей перехода от одного базиса трехмерного линейного пространства к его другому базису?
-
Линейные операции над векторами
-
Базис. Cкалярное произведение
-
Векторное и смешанное произведения векторов
-
Декартова система координат. прямая на плоскости
-
Плоскость в пространстве
-
Прямая в пространстве
-
Кривые второго порядка — I
-
Кривые второго порядка — II
-
Поверхности второго порядка
-
Матрицы и операции с ними
-
Обратная матрица
-
Ранг матрицы
-
Системы линейных алгебраических уравнений
-
Свойства решений однородных и неоднородных СЛАУ
Как найти координаты вектора в базисе
Решение:
Записываем матрицу перехода А:
и находим ее определитель
<>0
Видим, что ранг матрицы С равен трем. Из теоремы о базисном миноре векторы f1 , f2 , f3 линейно независимы, а поэтому могут быть приняты в качестве базиса пространства R 3 .
Находим обратную матрицу А -1 .
Транспонированная матрица:
Обратная матрица А -1
Находим координаты вектора х относительно нового базиса.
Пример №1 . Даны векторы a<1;2;1>, b<2;-2;1>, c <1;-2;0>и d <0;3;1>. Установить, что векторы a , b , c образуют базис, и найти координаты вектора d в этом базисе.
Решение:
Соотношение, записанное для векторов d = αa + βb + γc, справедливо для каждой из проекций:
α*1 + β*2 + γ*1 = 0
α*2 — β*2 — γ*2 = 3
α*1 + β*1 + γ0 = 1 т.е. получена алгебраическая система трёх уравнений с тремя неизвестными. Решение системы удобнее вычислять методом Крамера или методом обратной матрицы:
α = 1/2; β = 1/2; γ = -3/2
следовательно, и вектор d имеет разложение в базисе a, b, c :
d = 1/2a + 1/2b — 3/2c
Пример №2 . Даны векторы  . Показать, что векторы образуют базис трехмерного пространства и найти координаты вектора в этом базисе:
. Показать, что векторы образуют базис трехмерного пространства и найти координаты вектора в этом базисе:
Пример №3 . Даны два линейных преобразования:
х’1 = a11x1 + a12x2 + a13x3, х»1 = b11x’1 + b12x’2 + b13x’3,
х’2 = a21x1 + a22x2 + a23x3, х»2 = b21x’1 + b22x’2 + b23x’3,
х’3 = a31x1 + a32x2 + a33x3, х»3 = b31x’1 + b32x’2 + b33x’3,
Средствами матричного исчисления найти преобразование, выражающее х»1, x»2, x»3 через х1, х2, х3.
х’1 = 4x1 + 3x2 + 5x3, х»1 = — x’1 + 3x’2 — 2x’3,
х’2 = 6x1 + 7x2 + x3, х»2 = — 4x’1 + x’2 + 2x’3,
х’3 = 9x1 + x2 + 8x3, х»3 = 3x’1 — 4x’2 + 5x’3,
Решение. Используя калькулятор, получаем:
Обозначим:
Тогда матричное уравнение запишется в виде: A·X = B.
Вычислим определитель матрицы А:
∆ = 4*(7*8 — 1*1) — 6*(3*8 — 1*5) + 9*(3*1 — 7*5) = -182
Определитель матрицы А равен detA=-182
Так как A невырожденная матрица, то существует обратная матрица A -1 . Умножим слева обе части уравнения на A -1 : A -1 ·A·X = A -1 ·B, тогда получим E·X = A -1 ·B, или X = A -1 ·B.
Найдем обратную матрицу A -1 .
| A -1 = -1/182 |
|
Матрицу Х ищем по формуле:
| X = A -1 ·B = -1/182 |
|
* | = |
|
Пример №4 . В декартовой прямой системе координат даны вершины пирамиды A(3,0,-1), B(-1,-2,-4), C(-1,2,4), D(7,-3,1). Найдите:
а) длину ребра AB;
б) косинус угла между векторами AB и AC ;
в) уравнение ребра AB;
г) уравнение грани ABC;
д) уравнение высоты, опущенной из вершины D на грань ABC;
е) координаты векторов e 1= AB , e 2= AC , e 3= AD и докажите, что они образуют линейную независимую систему;
ж) координаты вектора MN , где M и N – середины ребер AD и DC соответственно;
з) разложение вектора MN по базису ( e 1, e 2, e 3)
Решение. Пункты (а-д) решаются через онлайн калькулятор.
Задание 1 . Разложить вектор d =(8;-5) по векторам a =(1;-2) и b =(2;3).
Решение. Векторы a и b образуют базис на плоскости, так как они не коллинеарны (, то есть соответствующие координаты этих векторов не пропорциональны).
Следовательно, вектор d = α a +β b , где α и β – коэффициенты, которые надо найти.
Таким образом, имеем равенство
8i-5j=α(i-2j)+β(2i+3j)=(α+2β)i+ (-2α+3β)j.
В координатной форме это равенство примет вид
Решим полученную систему уравнений.
Векторное пространство: размерность и базис, разложение вектора по базису
В статье о n -мерных векторах мы пришли к понятию линейного пространства, порождаемого множеством n -мерных векторов. Теперь нам предстоит рассмотреть не менее важные понятия, такие как размерность и базис векторного пространства. Они напрямую связаны с понятием линейно независимой системы векторов, так что дополнительно рекомендуется напомнить себе основы и этой темы.
Введем некоторые определения.
Размерность векторного пространства – число, соответствующее максимальному количеству линейно независимых векторов в этом пространстве.
Базис векторного пространства – совокупность линейно независимых векторов, упорядоченная и в своей численности равная размерности пространства.
Рассмотрим некое пространство n -векторов. Размерность его соответственно равна n . Возьмем систему из n -единичных векторов:
e ( 1 ) = ( 1 , 0 , . . . , 0 ) e ( 2 ) = ( 0 , 1 , . . . , 0 ) e ( n ) = ( 0 , 0 , . . . , 1 )
Используем эти векторы в качестве составляющих матрицы A : она будет являться единичной с размерностью n на n . Ранг этой матрицы равен n . Следовательно, векторная система e ( 1 ) , e ( 2 ) , . . . , e ( n ) является линейно независимой. При этом к системе невозможно добавить ни одного вектора, не нарушив ее линейной независимости.
Так как число векторов в системе равно n , то размерность пространства n -мерных векторов равна n , а единичные векторы e ( 1 ) , e ( 2 ) , . . . , e ( n ) являются базисом указанного пространства.
Из полученного определения сделаем вывод: любая система n -мерных векторов, в которой число векторов меньше n , не является базисом пространства.
Если мы поменяем местами первый и второй вектор, получим систему векторов e ( 2 ) , e ( 1 ) , . . . , e ( n ) . Она также будет являться базисом n -мерного векторного пространства. Составим матрицу, взяв за ее строки векторы полученной системы. Матрица может быть получена из единичной матрицы перестановкой местами первых двух строк, ранг ее будет равен n . Система e ( 2 ) , e ( 1 ) , . . . , e ( n ) линейно независима и является базисом n -мерного векторного пространства.
Переставив местами в исходной системе другие векторы, получим еще один базис.
Мы можем взять линейно независимую систему неединичных векторов, и она также будет представлять собой базис n -мерного векторного пространства.
Векторное пространство с размерностью n имеет столько базисов, сколько существует линейно независимых систем из n -мерных векторов числом n.
Плоскость является двумерным пространством – ее базисом будут два любых неколлинеарных вектора. Базисом трехмерного пространства послужат три любых некомпланарных вектора.
Рассмотрим применение данной теории на конкретных примерах.
Исходные данные: векторы
a = ( 3 , — 2 , 1 ) b = ( 2 , 1 , 2 ) c = ( 3 , — 1 , — 2 )
Необходимо определить, являются ли указанные векторы базисом трехмерного векторного пространства.
Решение
Для решения поставленной задачи исследуем заданную систему векторов на линейную зависимость. Составим матрицу, где строки – координаты векторов. Определим ранг матрицы.
A = 3 2 3 — 2 1 — 1 1 2 — 2 A = 3 — 2 1 2 1 2 3 — 1 — 2 = 3 · 1 · ( — 2 ) + ( — 2 ) · 2 · 3 + 1 · 2 · ( — 1 ) — 1 · 1 · 3 — ( — 2 ) · 2 · ( — 2 ) — 3 · 2 · ( — 1 ) = = — 25 ≠ 0 ⇒ R a n k ( A ) = 3
Следовательно, заданные условием задачи векторы линейно независимы, и их численность равна размерности векторного пространства – они являются базисом векторного пространства.
Ответ: указанные векторы являются базисом векторного пространства.
Исходные данные: векторы
a = ( 3 , — 2 , 1 ) b = ( 2 , 1 , 2 ) c = ( 3 , — 1 , — 2 ) d = ( 0 , 1 , 2 )
Необходимо определить, может ли указанная система векторов являться базисом трехмерного пространства.
Решение
Указанная в условии задачи система векторов является линейно зависимой, т.к. максимальное число линейно независимых векторов равно 3. Таким образом, указанная система векторов не может служить базисом трехмерного векторного пространства. Но стоит отметить, что подсистема исходной системы a = ( 3 , — 2 , 1 ) , b = ( 2 , 1 , 2 ) , c = ( 3 , — 1 , — 2 ) является базисом.
Ответ: указанная система векторов не является базисом.
Исходные данные: векторы
a = ( 1 , 2 , 3 , 3 ) b = ( 2 , 5 , 6 , 8 ) c = ( 1 , 3 , 2 , 4 ) d = ( 2 , 5 , 4 , 7 )
Могут ли они являться базисом четырехмерного пространства?
Решение
Cоставим матрицу, используя в качестве строк координаты заданных векторов
A = 1 2 3 3 2 5 6 8 1 3 2 4 2 5 4 7
По методу Гаусса определим ранг матрицы:
A = 1 2 3 3 2 5 6 8 1 3 2 4 2 5 4 7
1 2 3 3 0 1 0 2 0 1 — 1 1 0 1 — 2 1
1 2 3 3 0 1 0 2 0 0 — 1 — 1 0 0 — 2 — 1
1 2 3 3 0 1 0 2 0 0 — 1 — 1 0 0 0 1 ⇒ ⇒ R a n k ( A ) = 4
Следовательно, система заданных векторов линейно независима и их численность равна размерности векторного пространства – они являются базисом четырехмерного векторного пространства.
Ответ: заданные векторы являются базисом четырехмерного пространства.
Исходные данные: векторы
a ( 1 ) = ( 1 , 2 , — 1 , — 2 ) a ( 2 ) = ( 0 , 2 , 1 , — 3 ) a ( 3 ) = ( 1 , 0 , 0 , 5 )
Составляют ли они базис пространства размерностью 4?
Решение
Исходная система векторов линейно независима, но численность векторов в ней недостаточна, чтобы стать базисом четырехмерного пространства.
Ответ: нет, не составляют.
Разложение вектора по базису
Примем, что произвольные векторы e ( 1 ) , e ( 2 ) , . . . , e ( n ) являются базисом векторного n-мерного пространства. Добавим к ним некий n -мерный вектор x → : полученная система векторов станет линейно зависимой. Свойства линейной зависимости гласят, что хотя бы один из векторов такой системы может линейно выражаться через остальные. Переформулируя это утверждение, можно говорить о том, что хотя бы один из векторов линейно зависимой системы может раскладываться по остальным векторам.
Таким образом, мы пришли к формулировке важнейшей теоремы:
Любой вектор n -мерного векторного пространства единственным образом раскладывается по базису.
Докажем эту теорему:
зададим базис n -мерного векторного пространства — e ( 1 ) , e ( 2 ) , . . . , e ( n ) . Сделаем систему линейно зависимой, добавив к ней n -мерный вектор x → . Этот вектор может быть линейно выражен через исходные векторы e :
x = x 1 · e ( 1 ) + x 2 · e ( 2 ) + . . . + x n · e ( n ) , где x 1 , x 2 , . . . , x n — некоторые числа.
Теперь докажем, что такое разложение является единственным. Предположим, что это не так и существует еще одно подобное разложение:
Отнимем от левой и правой частей этого равенства соответственно левую и правую части равенства x = x 1 · e ( 1 ) + x 2 · e ( 2 ) + . . . + x n · e ( n ) . Получим:
1 — x 1 ) · e ( 1 ) + ( x
2 — x 2 ) · e ( 2 ) + . . . ( x
Система базисных векторов e ( 1 ) , e ( 2 ) , . . . , e ( n ) линейно независима; по определению линейной независимости системы векторов равенство выше возможно только тогда, когда все коэффициенты ( x
2 — x 2 ) , . . . , ( x
n — x n ) будут равны нулю. Из чего справедливым будет: x 1 = x
n . И это доказывает единственный вариант разложения вектора по базису.
При этом коэффициенты x 1 , x 2 , . . . , x n называются координатами вектора x → в базисе e ( 1 ) , e ( 2 ) , . . . , e ( n ) .
Доказанная теория делает понятным выражение «задан n -мерный вектор x = ( x 1 , x 2 , . . . , x n ) »: рассматривается вектор x → n -мерного векторного пространства, и его координаты заданы в некотором базисе. При этом также понятно, что этот же вектор в другом базисе n -мерного пространства будет иметь другие координаты.
Рассмотрим следующий пример: допустим, что в некотором базисе n -мерного векторного пространства задана система из n линейно независимых векторов
e ( 1 ) = ( e 1 ( 1 ) , e 2 ( 1 ) , . . . , e n ( 1 ) ) e ( 2 ) = ( e 1 ( 2 ) , e 2 ( 2 ) , . . . , e n ( 2 ) ) ⋮ e ( n ) = ( e 1 ( n ) , e 2 ( n ) , . . . , e n ( n ) )
а также задан вектор x = ( x 1 , x 2 , . . . , x n ) .
Векторы e 1 ( 1 ) , e 2 ( 2 ) , . . . , e n ( n ) в этом случае также являются базисом этого векторного пространства.
Предположим, что необходимо определить координаты вектора x → в базисе e 1 ( 1 ) , e 2 ( 2 ) , . . . , e n ( n ) , обозначаемые как x
Вектор x → будет представлен следующим образом:
2 · e ( 2 ) + . . . + x
Запишем это выражение в координатной форме:
( x 1 , x 2 , . . . , x n ) = x
1 · ( e ( 1 ) 1 , e ( 1 ) 2 , . . . , e ( 1 ) n ) + x
2 · ( e ( 2 ) 1 , e ( 2 ) 2 , . . . , e ( 2 ) n ) + . . . + + x
n · ( e ( n ) 1 , e ( n ) 2 , . . . , e ( n ) n ) = = ( x
2 e 1 ( 2 ) + . . . + x
2 e 2 ( 2 ) + + . . . + x
n e 2 ( n ) , . . . , x
2 e n ( 2 ) + . . . + x
Полученное равенство равносильно системе из n линейных алгебраических выражений с n неизвестными линейными переменными x
n e 2 n ⋮ x n = x
Матрица этой системы будет иметь следующий вид:
e 1 ( 1 ) e 1 ( 2 ) ⋯ e 1 ( n ) e 2 ( 1 ) e 2 ( 2 ) ⋯ e 2 ( n ) ⋮ ⋮ ⋮ ⋮ e n ( 1 ) e n ( 2 ) ⋯ e n ( n )
Пусть это будет матрица A , и ее столбцы – векторы линейно независимой системы векторов e 1 ( 1 ) , e 2 ( 2 ) , . . . , e n ( n ) . Ранг матрицы – n , и ее определитель отличен от нуля. Это свидетельствует о том, что система уравнений имеет единственное решение, определяемое любым удобным способом: к примеру, методом Крамера или матричным методом. Таким образом мы сможем определить координаты x
n вектора x → в базисе e 1 ( 1 ) , e 2 ( 2 ) , . . . , e n ( n ) .
Применим рассмотренную теорию на конкретном примере.
Исходные данные: в базисе трехмерного пространства заданы векторы
e ( 1 ) = ( 1 , — 1 , 1 ) e ( 2 ) = ( 3 , 2 , — 5 ) e ( 3 ) = ( 2 , 1 , — 3 ) x = ( 6 , 2 , — 7 )
Необходимо подтвердить факт, что система векторов e ( 1 ) , e ( 2 ) , e ( 3 ) также служит базисом заданного пространства, а также определить координаты вектора х в заданном базисе.
Решение
Система векторов e ( 1 ) , e ( 2 ) , e ( 3 ) будет являться базисом трехмерного пространства, если она линейно независима. Выясним эту возможность, определив ранг матрицы A , строки которой – заданные векторы e ( 1 ) , e ( 2 ) , e ( 3 ) .
Используем метод Гаусса:
A = 1 — 1 1 3 2 — 5 2 1 — 3
1 — 1 1 0 5 — 8 0 3 — 5
1 — 1 1 0 5 — 8 0 0 — 1 5
R a n k ( A ) = 3 . Таким образом, система векторов e ( 1 ) , e ( 2 ) , e ( 3 ) линейно независима и является базисом.
Пусть в базисе вектор x → имеет координаты x
3 . Связь этих координат определяется уравнением:
3 e 1 ( 3 ) x 2 = x
3 e 2 ( 3 ) x 3 = x
Применим значения согласно условиям задачи:
Решим систему уравнений методом Крамера:
∆ = 1 3 2 — 1 2 1 1 — 5 — 3 = — 1 ∆ x
1 = 6 3 2 2 2 1 — 7 — 5 — 3 = — 1 , x
1 ∆ = — 1 — 1 = 1 ∆ x
2 = 1 6 2 — 1 2 1 1 — 7 — 3 = — 1 , x
2 ∆ = — 1 — 1 = 1 ∆ x
3 = 1 3 6 — 1 2 2 1 — 5 — 7 = — 1 , x
Так, вектор x → в базисе e ( 1 ) , e ( 2 ) , e ( 3 ) имеет координаты x
Ответ: x = ( 1 , 1 , 1 )
Связь между базисами
Предположим, что в некотором базисе n-мерного векторного пространства даны две линейно независимые системы векторов:
c ( 1 ) = ( c 1 ( 1 ) , c 2 ( 1 ) , . . . , c n ( 1 ) ) c ( 2 ) = ( c 1 ( 2 ) , c 2 ( 2 ) , . . . , c n ( 2 ) ) ⋮ c ( n ) = ( c 1 ( n ) , e 2 ( n ) , . . . , c n ( n ) )
e ( 1 ) = ( e 1 ( 1 ) , e 2 ( 1 ) , . . . , e n ( 1 ) ) e ( 2 ) = ( e 1 ( 2 ) , e 2 ( 2 ) , . . . , e n ( 2 ) ) ⋮ e ( n ) = ( e 1 ( n ) , e 2 ( n ) , . . . , e n ( n ) )
Указанные системы являются также базисами заданного пространства.
n ( 1 ) — координаты вектора c ( 1 ) в базисе e ( 1 ) , e ( 2 ) , . . . , e ( 3 ) , тогда связь координат будет задаваться системой линейных уравнений:
1 ( 1 ) e 1 ( 1 ) + c
2 ( 1 ) e 1 ( 2 ) + . . . + c
n ( 1 ) e 1 ( n ) с 2 ( 1 ) = c
1 ( 1 ) e 2 ( 1 ) + c
2 ( 1 ) e 2 ( 2 ) + . . . + c
n ( 1 ) e 2 ( n ) ⋮ с n ( 1 ) = c
1 ( 1 ) e n ( 1 ) + c
2 ( 1 ) e n ( 2 ) + . . . + c
В виде матрицы систему можно отобразить так:
( c 1 ( 1 ) , c 2 ( 1 ) , . . . , c n ( 1 ) ) = ( c
n ( 1 ) ) · e 1 ( 1 ) e 2 ( 1 ) … e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) … e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) … e n ( n )
Сделаем по аналогии такую же запись для вектора c ( 2 ) :
( c 1 ( 2 ) , c 2 ( 2 ) , . . . , c n ( 2 ) ) = ( c
n ( 2 ) ) · e 1 ( 1 ) e 2 ( 1 ) … e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) … e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) … e n ( n )
И, далее действуя по тому же принципу, получаем:
( c 1 ( n ) , c 2 ( n ) , . . . , c n ( n ) ) = ( c
n ( n ) ) · e 1 ( 1 ) e 2 ( 1 ) … e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) … e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) … e n ( n )
Матричные равенства объединим в одно выражение:
c 1 ( 1 ) c 2 ( 1 ) ⋯ c n ( 1 ) c 1 ( 2 ) c 2 ( 2 ) ⋯ c n ( 2 ) ⋮ ⋮ ⋮ ⋮ c 1 ( n ) c 2 ( n ) ⋯ c n ( n ) = c
n ( n ) · e 1 ( 1 ) e 2 ( 1 ) ⋯ e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) ⋯ e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) ⋯ e n ( n )
Оно и будет определять связь векторов двух различных базисов.
Используя тот же принцип, возможно выразить все векторы базиса e ( 1 ) , e ( 2 ) , . . . , e ( 3 ) через базис c ( 1 ) , c ( 2 ) , . . . , c ( n ) :
e 1 ( 1 ) e 2 ( 1 ) ⋯ e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) ⋯ e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) ⋯ e n ( n ) = e
n ( n ) · c 1 ( 1 ) c 2 ( 1 ) ⋯ c n ( 1 ) c 1 ( 2 ) c 2 ( 2 ) ⋯ c n ( 2 ) ⋮ ⋮ ⋮ ⋮ c 1 ( n ) c 2 ( n ) ⋯ c n ( n )
Дадим следующие определения:
n ( n ) является матрицей перехода от базиса e ( 1 ) , e ( 2 ) , . . . , e ( 3 )
к базису c ( 1 ) , c ( 2 ) , . . . , c ( n ) .
n ( n ) является матрицей перехода от базиса c ( 1 ) , c ( 2 ) , . . . , c ( n )
к базису e ( 1 ) , e ( 2 ) , . . . , e ( 3 ) .
Координаты и преобразования координат в линейном пространстве
Координаты векторов в данном базисе линейного пространства
Пусть — базис линейного пространства . Каждый вектор можно разложить по базису (см. теорему 8.1), т.е. представить в виде , причем коэффициенты в разложении определяются однозначно. Эти коэффициенты называются координатами вектора в базисе (или относительно базиса ). Координаты вектора — это упорядоченный на бор чисел, который представляется в виде матрицы-столбца и называется координатным столбцом вектора (в данном базисе). Вектор и его координатный столбец обозначаются одной и той же буквой полужирной или светлой соответственно.
Если базис (как упорядоченный набор векторов) представить в виде символической матрицы-строки , то разложение вектора по базису можно записать следующим образом:
Здесь умножение символической матрицы-строки на числовую матрицу-столбец производится по правилам умножения матриц.
При необходимости, если речь идет о разных базисах, у координатного столбца указывается обозначение базиса, относительно которого получены координаты, например, — координатный столбец вектора в базисе .
Из теоремы 8.1 следует, что равные векторы имеют равные соответствующие координаты (в одном и том же базисе), и наоборот, если координаты векторов (в одном и том же базисе) соответственно равны, то равны и сами векторы .
Линейные операции в координатной форме
Пусть — базис линейного пространства , векторы и имеют в этом базисе координаты и соответственно, т.е.
Складывая эти равенства, получаем .
т.е. при сложении векторов их координаты складываются .
Умножая второе равенство в (8.7) на число , получаем
т.е. при умножении вектора на число все его координаты умножаются на это число .
Другими словами, сумма векторов имеет координаты , а произведение имеет координаты . Разумеется, что все координаты получены в одном базисе .
1. Нетрудно показать, что координатный столбец линейной комбинации векторов равен линейной комбинации координатных столбцов этих векторов.
2. Если система векторов линейно зависима (линейно независима), то их координатные столбцы, полученные относительно одного базиса, образуют линейно зависимую (соответственно, линейно независимую) систему. Это следует из равносильности равенств и . Например, если в этих равенствах не все коэффициенты равны нулю, т.е. система векторов и система их координатных столбцов линейно зависимы одновременно.
3. Все свойства линейной зависимости и линейной независимости векторов переносятся без изменений на их координатные столбцы, полученные в одном и том же базисе. И наоборот, свойства для матриц-столбцов, переносятся на векторы, если матрицы-столбцы считать их координатными столбцами.
4. Выбрав в n-мерном вещественном линейном пространстве некоторый базис, можно установить взаимно однозначное соответствие: каждому вектору поставить в соответствие его координатный столбец (в вы бранном базисе), и наоборот, каждому координатному столбцу поставить в соответствие вектор. Другими словами, любой фиксированный базис n-мерного вещественного линейного пространства позволяет установить взаимно однозначное соответствие между всеми векторами вещественно го пространства и всеми столбцами n-мерного арифметического пространства . Это соответствие обозначается . Для n-мерного комплексного линейного пространства аналогичное взаимно однозначное соответствие устанавливается с пространством .
Преобразование координат вектора при замене базиса
Пусть заданы два базиса пространства и . Базис будем условно называть «старым», а базис — «новым». Пусть известны разложения каждого вектора нового базиса по старому базису:
Записывая по столбцам координаты векторов в базисе , составляем матрицу:
Квадратная матрица , составленная из координатных столбцов векторов нового базиса в старом базисе , называется матрицей перехода от старого базиса к новому. При помощи матрицы перехода (8.9) формулы (8.8) можно записать в виде:
Умножение символической матрицы-строки на матрицу перехода в (8.10) производится по правилам умножения матриц.
Пусть в базисе вектор имеет координаты , а в базисе — координаты , т.е.
Подставляя в правую часть последнего равенства выражение (8.10), получаем — два разложения вектора в одном и том же базисе . Коэффициенты этих разложений должны совпадать (по теореме 8.1), так как это координаты одного и того же вектора в одном базисе. Поэтому
Формула (8.11) устанавливает связь координат вектора в разных базисах: координатный столбец вектора в старом базисе получается в результате умножения матрицы перехода на координатный столбец вектора в новом базисе .
Пример 8.3. В пространстве многочленов степени не выше второй даны две системы многочленов:
Доказать, что каждая система является базисом пространства . Найти матрицу перехода от базиса к базису . Определить координаты квадратного трехчлена относительно базисов и .
Решение. Система многочленов является стандартным базисом пространства . Докажем, что система является базисом. По ступим следующим образом. Найдем координатные столбцы этих многочленов в стандартном базисе. Раскладывая по базису , получаем
Составим из этих столбцов матрицу . Ранг этой матрицы равен 3, так как . Следовательно, столбцы линейно независимы, тогда и многочлены линейно независимы (см. пункт 2 замечаний 8.5). Итак, многочлены являются базисом пространства , а матрица — искомая матрица перехода от базиса к базису . Осталось найти координаты многочлена в этих базисах. Раскладывая по базисам, находим
Проверим результат, вычисляя по формуле (8.11):
Свойства матрицы перехода от одного базиса к другому
1. Пусть имеются три базиса пространства и известны матрицы перехода: от базиса к базису ; от к ; от к . Тогда
Действительно, запишем связь (8.10) для данных базисов:
Подставляя первое выражение во второе равенство, получаем . Сравнивая с третьим равенством, приходим к (8.12).
2. Если — матрица перехода от базиса к базису , то матрица обратима и обратная матрица является матрицей перехода от базиса к базису . Координаты вектора в базисах и связаны формулами:
В самом деле, пусть — матрица перехода от базиса к базису . Учитывая, что матрица перехода от базиса к базису — единичная, применяем свойство 1 к трем базисам . Для трех базисов аналогично получаем: . Следовательно, .
3. Всякая обратимая квадратная матрица n-го порядка может служить матрицей перехода от одного базиса n-мерного линейного пространства к другому базису.
Пример 8.4. В двумерном арифметическом пространстве даны два базиса: и . Найти матрицу перехода от базиса к базису и координаты вектора в каждом из базисов.
Решение. Рассмотрим стандартный базис пространства . Находим координаты векторов в стандартном базисе. Раскладываем вектор
В стандартном базисе пространства координатный столбец совпадает с вектором . Для других векторов аналогично получаем . Из координатных столбцов составим матрицы перехода (8.9) от стандартного базиса к данным базисам и
По свойству 1 матриц перехода имеем . .По свойству 2: . Поэтому
В стандартном базисе пространства координатный столбец совпадает с вектором . Найдем координаты этого вектора в базисе (по свойству 2 матрицы перехода):
В самом деле, справедливо разложение
Найдем координаты вектора в базисе двумя способами
Полученный результат подтверждает разложение:
http://zaochnik.com/spravochnik/matematika/vektory/vektornoe-prostranstvo/
http://mathhelpplanet.com/static.php?p=pryeobrazovaniya-koordinat-v-linyeinom-prostranstve