
оксана николаевна кузнецова
Эксперт по предмету «Математика»
Задать вопрос автору статьи
Вектор в произвольном линейном пространстве — это некоторый элемент этого пространства.
Замечание 1
Базисом трёхмерного пространства называют некоторые линейно независимые вектора $a, b$ и $c$, если любой вектор $d$ может быть выражен в виде линейной комбинации этих векторов, то есть существуют некоторые вещественные коэффициенты $λ, μ$ и $ν$, причём такие, что будет соблюдаться условие $d= λ cdot a + μcdot b + ν cdot c left( 1 right)$.
Числа $λ, μ$ и $ν$ называются координатами рассматриваемого вектора относительно некоторого базиса $a, b$ и $c$.
В контексте плоскости базисом будет два независимых вектора, лежащих в этой плоскости, а не три, как в объёмном мире.
Любой вектор $d$ имеет лишь единственное разложение по базису векторов, то есть его координаты задаются однозначно через используемый базис.
Определение 1
Аффинными координатами некоторой точки $M$ в пространстве называются координаты точки относительно базиса пространства $a, b$ и $c$ и некоторой точки $O$, которую принимают за начало координат.
Декартова система координат является примером аффиной системы координат, причём базисные вектора в ней принято обозначать не буквами $a, b$ и $c$, а $i, j$ и $k$, представляющими собой направленные ортогональные между собой отрезки, причём длина каждого равна единице.
Для декартовой системы координат формула разложения выглядит так:
$d = X cdot vec{i} + Y cdot vec{j} + Z cdot vec{k}$
Здесь $X, Y$ и $Z$ — координаты вектора, а $ i, j$ и $k$ — базис.
Через базис декартовой системы координат выражается скалярное произведение векторов, заданных в этом пространстве. Для этого их координаты записываются через специальную матрицу.
Пример 1
Докажите, что вектора, $a_1…a_4$, перечисленные ниже, являются базисом пространства $mathbb{R^4}$.
$a_1 = (1; 2; -1: -2)$;
$a_2 = (2; 3 0; -1)$;
$a_3 = (1; 2; 1; 4)$;
$a_4 = (1; 3; -1; 0)$
Решение:
Размерность данного пространства равна 4, а это значит, что для проверки того, являются ли эти вектора базисом, нужно доказать их линейную независимость, то есть доказать, что ранг матрицы, составленной из координат этих векторов как из строчек, равен количеству строк.
Составленная матрица имеет вид:
$A = begin{pmatrix} 1 & 2 & -1 & -2 \ 2 & 3 & 0 & -1 \ 1 & 2 & 1 & 4 \ 1 & 3 & -1 & 0 \ end{pmatrix}$
Преобразуем её к треугольной, для краткости описания выполняемых операций строчки будем записывать (n), здесь $n$ — номер строчки.
1) (4) — (1); (3) — (1); (2) — (1) $cdot 2$:
$begin{pmatrix} 1 & 2 & -1 & -2 \ 0 & -1 & 2 & 3 \ 0 & 0 & 2 & 6 \ 0 & 1 & 0 & 2 \ end{pmatrix}$
2) (4) + (2):
$begin{pmatrix} 1 & 2 & -1 & -2 \ 0 & -1 & 2 & 3 \ 0 & 0 & 2 & 6 \ 0 & 0 & 2 & 5 \ end{pmatrix}$
3) (4) — (3):
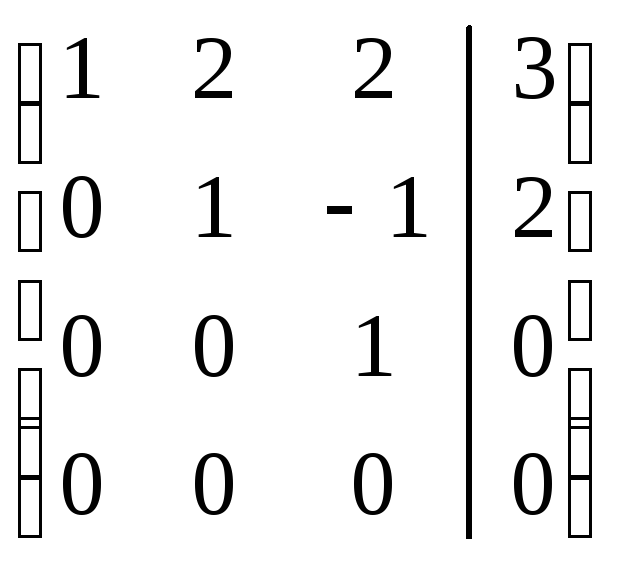
$begin{pmatrix} 1 & 2 & -1 & -2 \ 0 & -1 & 2 & 3 \ 0 & 0 & 2 & 6 \ 0 & 0 & 0 & -1 \ end{pmatrix}$
Приведённая матрица имеет ранг 4, а значит данные вектора образуют базис этого пространства.
«Разложение вектора по базису векторов: формулировка с примерами решения» 👇
Пример 2
Пусть вектор $vec{k}$ можно разложить с использованием базиса $vec{a}$ и $vec{b}$ по формуле
$vec{k}= 5cdot vec{a} – 3 cdot vec{b}$. Каковы его координаты в соответствии с этим базисом?
Решение:
$vec{a}$ и $vec{b}$ — единичные вектора данного двумерного пространства, а это значит, что коэффициенты при них в заданном равенстве и являются координатами в этом базисе:
$vec{k} = (5; — 3)_{{a; b}}$.
Пример 3
Дан базис из трёх векторов $(1; 1; 3), ( -3; 4; 9), (2; -2; 4)$ и вектор $vec{k}=(8; -9; 6)$. Разложите данный вектор по заданному базису.
Решение:
Воспользуемся формулировкой разложения $(1)$:
$k_1 cdot (1; 1; 3) + k_2 cdot ( -3; 4; 9) + k_3 cdot (2; -2; 4) = (8; -9; 6)$;
Для того чтобы узнать координаты в данном базисе, составим расширенную матрицу, действия со строчками будем записывать как в предыдущем примере:
$begin{array}{ccc|c} 1 & -3 & 2 & 8 \ -1 & 4 & -2 & -9 \ 3 & 9 & 4 & 6 \ end{array}$
1) (2) — (1); (3) — (1) $cdot 3$:
$begin{array}{ccc|c} 1 & -3 & 2 & 8 \ 0 & 1 & 0 & -1 \ 0 & 18 & -2 & -18 \ end{array}$;
2) (1) + (2) $cdot 3$; (3) — (2) $cdot 18$:
$begin{array}{ccc|c} 1 & 0 & 2 & 5 \ 0 & 1 & 0 & -1 \ 0 & 0 & -2 & 0 \ end{array}$;
3) (3) : (-2):
$begin{array}{ccc|c} 1 & 0 & 2 & 5 \ 0 & 1 & 0 & -1 \ 0 & 0 & 1 & 0 \ end{array}$;
4) (1) — (3) $cdot 2$:
$begin{array}{ccc|c} 1 & 0 & 0 & 5 \ 0 & 1 & 0 & -1 \ 0 & 0 & 1 & 0 \ end{array}$;
Координатами вектора $vec{k}$ в заданном базисе будут $(5; — 1; 0)$.
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме
Линейной
комбинацией векторов
![]() называется вектор
называется вектор![]() ,
,
где λ1, … , λm– произвольные коэффициенты.
Система
векторов
![]() называется
называется
линейно зависимой, если существует ее
линейная комбинация, равная![]() ,
,
в которой есть хотя бы один ненулевой
коэффициент.
Система
векторов
![]() называется
называется
линейно независимой, если в любой ее
линейной комбинации, равной![]() ,
,
все коэффициенты нулевые.
Базисом
системы векторов
![]() называется
называется
ее непустая линейно независимая
подсистема, через которую можно выразить
любой вектор системы.
П р
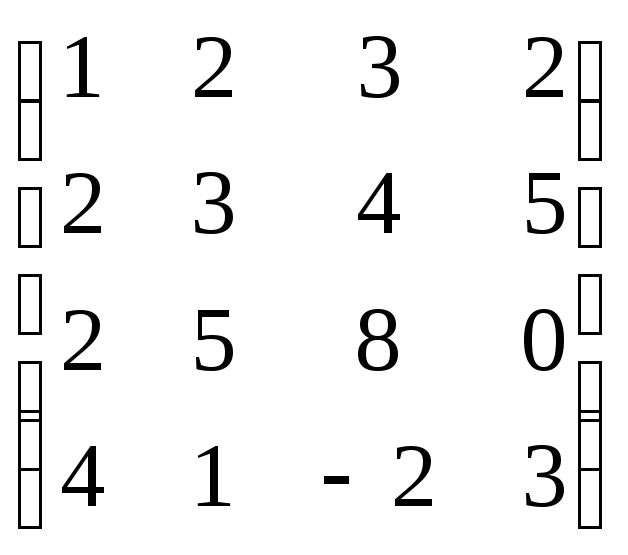
и м е р 2. Найти базис системы векторов![]() =
=
(1, 2, 2, 4),![]() =
=
(2, 3, 5, 1),![]() =
=
(3, 4, 8, -2),![]() =
=
(2, 5, 0, 3) и выразить остальные векторы
через базис.
Р е
ш е н и е. Строим матрицу, в которой
координаты данных векторов располагаем
по столбцам. Приводим ее к ступенчатому
виду.
 ~
~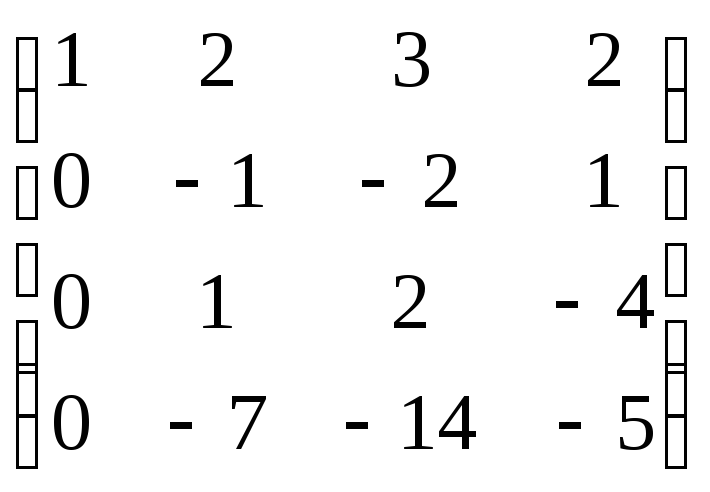 ~
~ ~
~ .
.
Базис
данной системы образуют векторы
![]() ,
,![]() ,
,![]() ,
,
которым соответствуют ведущие элементы
строк, выделенные кружками. Для выражения
вектора![]() решаем уравнениеx1
решаем уравнениеx1![]() +x2
+x2![]() +
+
x4![]() =
=![]() .
.
Оно сводится к системе линейных
уравнений, матрица которой получается
из исходной перестановкой столбца,
соответствующего![]() ,
,
на место столбца свободных членов.
Поэтому для решения системы используем
полученную матрицу в ступенчатом виде,
сделав в ней необходимые перестановки.
Последовательно
находим:
x4
= 0;
x2
= 2;
x1
+ 4 = 3, x1
= -1;
![]() =
=
—![]() +2
+2![]() .
.
Замечание
1. Если требуется выразить через базис
несколько векторов, то для каждого из
них строится соответствующая система
линейных уравнений. Эти системы будут
отличаться только столбцами свободных
членов. Поэтому для их решения можно
составить одну матрицу, в которой будет
несколько столбцов свободных членов.
При этом каждая система решается
независимо от остальных.
Замечание
2. Для выражения любого вектора достаточно
использовать только базисные векторы
системы, стоящие перед ним. При этом
нет необходимости переформировывать
матрицу, достаточно поставить вертикальную
черту в нужном месте.
У п
р а ж н е н и е 2. Найти базис системы
векторов и выразить остальные векторы
через базис:
а)
![]() =
=
(1, 3, 2, 0),![]() =
=
(3, 4, 2, 1),![]() =
=
(1, -2, -2, 1),![]() =
=
(3, 5, 1, 2);
б)
![]() =
=
(2, 1, 2, 3),![]() =
=
(1, 2, 2, 3),![]() =
=
(3, -1, 2, 2),![]() =
=
(4, -2, 2, 2);
в)
![]() =
=
(1, 2, 3),![]() =
=
(2, 4, 3),![]() =
=
(3, 6, 6),![]() =
=
(4, -2, 1);![]() =
=
(2, -6, -2).
-
3. Фундаментальная система решений
Система
линейных уравнений называется однородной,
если все ее свободные члены равны нулю.
Фундаментальной
системой решений однородной системы
линейных уравнений называется базис
множества ее решений.
Пусть
дана неоднородная система линейных
уравнений. Однородной системой,
ассоциированной с данной, называется
система, полученная из данной заменой
всех свободных членов на нули.
Если
неоднородная система совместна и
неопределенна, то ее произвольное
решение имеет вид fн
+ 1fо1+
… + kfоk
,гдеfн– частное
решение неоднородной системы иfо1,
… , fоk–
фундаментальная система решений
ассоциированной однородной системы.
П р
и м е р 3. Найти частное решение
неоднородной системы из примера 1 и
фундаментальную систему решений
ассоциированной однородной системы.
Р е
ш е н и е. Запишем решение, полученное
в примере 1, в векторном виде и разложим
получившийся вектор в сумму по свободным
параметрам, имеющимся в нем, и фиксированным
числовым значениям:
![]() = (x1,
= (x1,
x2,
x3,
x4) =
(–2a + 7b –
2, a, –2b + 1, b) = (–2a,
a, 0, 0) + (7b, 0, –2b, b) + +(–
2, 0, 1, 0) = a(-2, 1, 0, 0) + b(7, 0, -2, 1) + (–
2, 0, 1, 0).
Получаемfн=(–
2, 0, 1, 0), fо1= (-2, 1, 0,
0), fо2= (7, 0, -2, 1).
Замечание.
Аналогично решается задача нахождения
фундаментальной системы решений
однородной системы.
У п
р а ж н е н и е 3.1 Найти фундаментальную
систему решений однородной системы:
а)
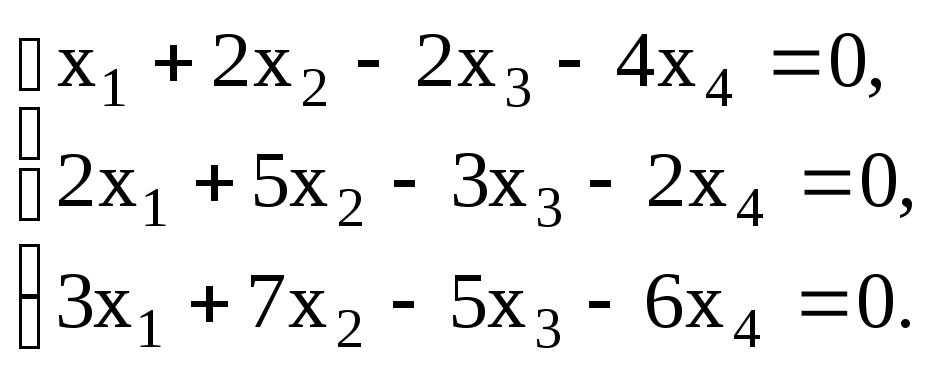
б)
в)
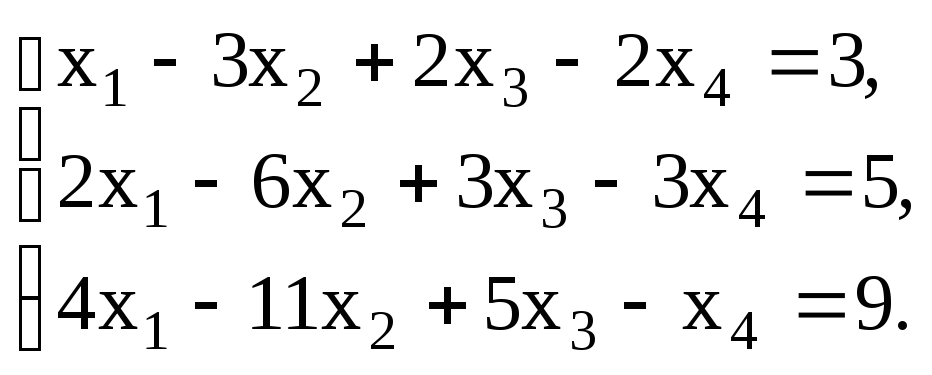
2x1 –
x2
+3x3=
0.
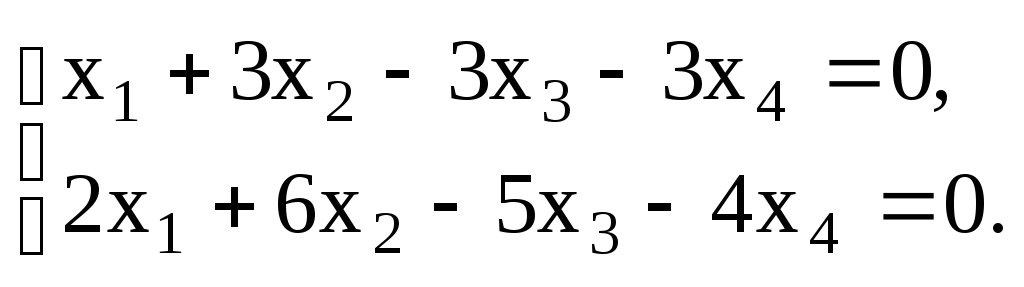
У п
р а ж н е н и е 3.2. Найти частное решение
неоднородной системы и фундаментальную
систему решений ассоциированной
однородной системы:
а)
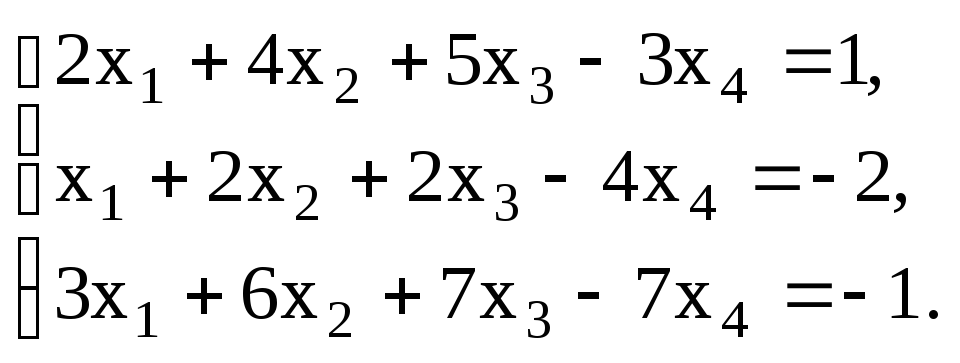
б)
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Координаты вектора в базисе
В системе векторов a1, a2, a3, a4 найти любую подсистему векторов, которые образуют базис, разложить векторы по базису, перейти к другому базису, найти коэффициенты разложения векторов во втором базисе; в обоих случаях определить обратные матрицы, соответствующие векторам базиса. Правильность вычисления в каждом случае проверить с помощью умножения вектора слева на матрицу, обратную матрице вектора базиса.
Пример №2 . В системе векторов a1, a2, a3, a4 найти любую подсистему векторов, которые образуют базис, разложить векторы по базису, перейти к другому базису, найти коэффициенты разложения векторов во втором базисе; в обоих случаях определить обратные матрицы, соответствующие векторам базиса. Правильность вычисления в каждом случае проверить с помощью умножения вектора слева на матрицу, обратную матрице вектора базиса.
a1=(1;5;3), a2=(2;1;-1), a3=(4;2;1), a4=(17;13;4).
4.3.3 Формулы перехода от одного базиса к другому
Очевидно, что в одном и том же пространстве можно выбрать множество базисов. Пусть в  выбрано два базиса
выбрано два базиса  и
и  .
.
Векторы базиса  могут быть выражены через векторы базиса
могут быть выражены через векторы базиса  :
:
 (4)
(4)
Матрица  называется матрицей перехода от базиса к базису . В ее столбцах записаны координаты векторов
называется матрицей перехода от базиса к базису . В ее столбцах записаны координаты векторов  относительно базиса
относительно базиса  .
.
Соотношения (4) называются формулами перехода от базиса к базису . Их можно записать в матричной форме:
 , отсюда
, отсюда  .
.
Пусть вектор  задан своими координатами относительно базиса –
задан своими координатами относительно базиса –  , а относительно базиса –
, а относительно базиса –  . Тогда
. Тогда
 и
и  . (5)
. (5)
Пример 4. Относительно базиса  ,
,  ,
,  даны четыре вектора
даны четыре вектора  ,
,  ,
,  и
и  . Векторы
. Векторы  можно принять за базис в
можно принять за базис в  . Найти координаты вектора в базисе
. Найти координаты вектора в базисе  .
.
Решение. Матрица перехода от базиса  к базису имеет вид
к базису имеет вид  . Обозначим координаты вектора в базисе через
. Обозначим координаты вектора в базисе через  . Согласно формулам (5), имеем:
. Согласно формулам (5), имеем:
 . Находим
. Находим  :
:  ;
;
 ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;
 .
.
Проверка:  ;
;
 ;
;
 или
или  .
.
Анал_Геом / Изменение координат вектора при изменении базиса
Пусть в  -мерном линейном пространстве
-мерном линейном пространстве  выбран базис
выбран базис  , который мы будем для удобства называть «старый» и другой базис
, который мы будем для удобства называть «старый» и другой базис  , который мы будем называть «новый». Возьмем призвольный вектор
, который мы будем называть «новый». Возьмем призвольный вектор  из
из  . Его координатный столбец в старом базисе обозначим
. Его координатный столбец в старом базисе обозначим  , а в новом —
, а в новом —  . Нам нужно выяснить, как связаны друг с другом координаты в старом и в новом базисе. Для этого нам сначала нужно «связать» друг с другом старый и новый базисы. Запишем разложения новых базисных векторов по старому базису
. Нам нужно выяснить, как связаны друг с другом координаты в старом и в новом базисе. Для этого нам сначала нужно «связать» друг с другом старый и новый базисы. Запишем разложения новых базисных векторов по старому базису

Составим матрицу, столбцами которой служат координатные столбцы векторов нового базиса

Эта матрица называется матрицей перехода от старого базиса к новому.
Замечание 18.1 Матрица перехода всегда невырождена, то есть  .
.
Предложение 18.5 Координатные столбцы в старом базисе и в новом базисе связаны формулой

где справа стоит произведение матрицы перехода  на матрицу-столбец.
на матрицу-столбец.
Доказательство. Так как  — координатный столбец вектора
— координатный столбец вектора  в новом базисе, то
в новом базисе, то

Заменив векторы  их разложениями по старому базису, получим
их разложениями по старому базису, получим

В силу предложения 14.3 изменим порядок суммирования
Здесь мы получили разложение вектора  по старому базису, причем координата вектора с номером
по старому базису, причем координата вектора с номером  равна
равна  . Элемент с номером
. Элемент с номером  столбца
столбца  будет иметь такой же вид. Следовательно, формула (18.1) доказана.
будет иметь такой же вид. Следовательно, формула (18.1) доказана.
Пример 18.4 Пусть  , то есть
, то есть  — трехмерное векторное пространство. Пусть задан ортонормированный базис i, j, k. Выберем другой (новый) базис
— трехмерное векторное пространство. Пусть задан ортонормированный базис i, j, k. Выберем другой (новый) базис

Возьмем вектор  . Найдем его координаты в новом базисе.
. Найдем его координаты в новом базисе.
Выпишем матрицу перехода, ее столбцы — это координаты новых базисных векторов

Пусть  — координатный столбец вектора
— координатный столбец вектора  в новом базисе. Тогда
в новом базисе. Тогда

Найдем матрицу  по формуле (14.14). Находим определитель
по формуле (14.14). Находим определитель

Находим алгебраические дополнения


Находим координаты вектора

Таким образом, новые координаты вектора  :
:  ,
,  ,
,  ,
,  .
.
Тот же самый результат можно было получить, записав формулу (18.2) в виде системы уравнений

Решив эту систему, например, методом Гаусса, найдем новые координаты  ,
,  ,
,  .
.
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Как найти координаты вектора в базисе
Решение:
Записываем матрицу перехода А:
и находим ее определитель
<>0
Видим, что ранг матрицы С равен трем. Из теоремы о базисном миноре векторы f1 , f2 , f3 линейно независимы, а поэтому могут быть приняты в качестве базиса пространства R 3 .
Находим обратную матрицу А -1 .
Транспонированная матрица:
Обратная матрица А -1
Находим координаты вектора х относительно нового базиса.
Пример №1 . Даны векторы a<1;2;1>, b<2;-2;1>, c <1;-2;0>и d <0;3;1>. Установить, что векторы a , b , c образуют базис, и найти координаты вектора d в этом базисе.
Решение:
Соотношение, записанное для векторов d = αa + βb + γc, справедливо для каждой из проекций:
α*1 + β*2 + γ*1 = 0
α*2 — β*2 — γ*2 = 3
α*1 + β*1 + γ0 = 1 т.е. получена алгебраическая система трёх уравнений с тремя неизвестными. Решение системы удобнее вычислять методом Крамера или методом обратной матрицы:
α = 1/2; β = 1/2; γ = -3/2
следовательно, и вектор d имеет разложение в базисе a, b, c :
d = 1/2a + 1/2b — 3/2c
Пример №2 . Даны векторы  . Показать, что векторы образуют базис трехмерного пространства и найти координаты вектора в этом базисе:
. Показать, что векторы образуют базис трехмерного пространства и найти координаты вектора в этом базисе:
Пример №3 . Даны два линейных преобразования:
х’1 = a11x1 + a12x2 + a13x3, х»1 = b11x’1 + b12x’2 + b13x’3,
х’2 = a21x1 + a22x2 + a23x3, х»2 = b21x’1 + b22x’2 + b23x’3,
х’3 = a31x1 + a32x2 + a33x3, х»3 = b31x’1 + b32x’2 + b33x’3,
Средствами матричного исчисления найти преобразование, выражающее х»1, x»2, x»3 через х1, х2, х3.
х’1 = 4x1 + 3x2 + 5x3, х»1 = — x’1 + 3x’2 — 2x’3,
х’2 = 6x1 + 7x2 + x3, х»2 = — 4x’1 + x’2 + 2x’3,
х’3 = 9x1 + x2 + 8x3, х»3 = 3x’1 — 4x’2 + 5x’3,
Решение. Используя калькулятор, получаем:
Обозначим:
Тогда матричное уравнение запишется в виде: A·X = B.
Вычислим определитель матрицы А:
∆ = 4*(7*8 — 1*1) — 6*(3*8 — 1*5) + 9*(3*1 — 7*5) = -182
Определитель матрицы А равен detA=-182
Так как A невырожденная матрица, то существует обратная матрица A -1 . Умножим слева обе части уравнения на A -1 : A -1 ·A·X = A -1 ·B, тогда получим E·X = A -1 ·B, или X = A -1 ·B.
Найдем обратную матрицу A -1 .
| A -1 = -1/182 |
|
Матрицу Х ищем по формуле:
| X = A -1 ·B = -1/182 |
|
* | = |
|
Пример №4 . В декартовой прямой системе координат даны вершины пирамиды A(3,0,-1), B(-1,-2,-4), C(-1,2,4), D(7,-3,1). Найдите:
а) длину ребра AB;
б) косинус угла между векторами AB и AC ;
в) уравнение ребра AB;
г) уравнение грани ABC;
д) уравнение высоты, опущенной из вершины D на грань ABC;
е) координаты векторов e 1= AB , e 2= AC , e 3= AD и докажите, что они образуют линейную независимую систему;
ж) координаты вектора MN , где M и N – середины ребер AD и DC соответственно;
з) разложение вектора MN по базису ( e 1, e 2, e 3)
Решение. Пункты (а-д) решаются через онлайн калькулятор.
Задание 1 . Разложить вектор d =(8;-5) по векторам a =(1;-2) и b =(2;3).
Решение. Векторы a и b образуют базис на плоскости, так как они не коллинеарны (, то есть соответствующие координаты этих векторов не пропорциональны).
Следовательно, вектор d = α a +β b , где α и β – коэффициенты, которые надо найти.
Таким образом, имеем равенство
8i-5j=α(i-2j)+β(2i+3j)=(α+2β)i+ (-2α+3β)j.
В координатной форме это равенство примет вид
Решим полученную систему уравнений.
Алгоритм нахождения базиса системы векторов
Для того чтобы найти базис системы векторов Av А2. А , необходимо:
1) составить соответствующую системе векторов однородную систему уравнений
2) привести эту систему к равносильной разрешенной системе вида
- 3) записать базис системы векторов Б = (АрА2, . А ), включив в него векторы, соответствующие разрешенным неизвестным;
- 4) записать разложения векторов по базису; коэффициентами разложения вектора А. по этому базису являются координаты соответствующего вектора
в разрешенной системе уравнений, т.е.
Система векторов, состоящая из п векторов, ранг которой равен г, может иметь несколько базисов. Число возможных базисов системы векторов определяется как число меньшее или равное числу сочетаний из п по г.
Пример 3.3. Найти ранг и базис системы векторов
разложения векторов по базису, перейти к новому базису и найти число возможных базисов системы.
Решение. Составим систему уравнений A t ay + А2х2 + . + А„хп = 0, которая в координатной записи имеет вид
Приведение данной системы уравнений с помощью преобразований Жордана к равносильной разрешенной приведено в ниже следующей таблице.
Разрешенная система имеет вид
В базис системы векторов включаем 1-й и 2-й векторы Б: = (AVA2), которые соответствуют разрешенным неизвестным х1 и х2. Ранг системы векторов равен числу векторов, вошедших в базис, т.е. г = 2.
Запишем разложения векторов по базису. Коэффициентами разложения вектора А3 являются координаты вектора А’3 = (3, -2), т.е. коэффициенты при х3 в разрешенной системе уравнений (в последних трех строках таблицы), они образуют столбец, расположенный под х3 А3 = ЗЛ1 — 2Аг Аналогично, коэффициентами разложения вектора А4 являются координаты вектора А’4 = (4, 1) А4 = 4Ау + 1 Ат
Для нахождения нового базиса необходимо выбрать новый разрешающий элемент. Пусть этим элементом будет элемент я94 = 1.
Векторное пространство: размерность и базис, разложение вектора по базису
В статье о n -мерных векторах мы пришли к понятию линейного пространства, порождаемого множеством n -мерных векторов. Теперь нам предстоит рассмотреть не менее важные понятия, такие как размерность и базис векторного пространства. Они напрямую связаны с понятием линейно независимой системы векторов, так что дополнительно рекомендуется напомнить себе основы и этой темы.
Введем некоторые определения.
Размерность векторного пространства – число, соответствующее максимальному количеству линейно независимых векторов в этом пространстве.
Базис векторного пространства – совокупность линейно независимых векторов, упорядоченная и в своей численности равная размерности пространства.
Рассмотрим некое пространство n -векторов. Размерность его соответственно равна n . Возьмем систему из n -единичных векторов:
e ( 1 ) = ( 1 , 0 , . . . , 0 ) e ( 2 ) = ( 0 , 1 , . . . , 0 ) e ( n ) = ( 0 , 0 , . . . , 1 )
Используем эти векторы в качестве составляющих матрицы A : она будет являться единичной с размерностью n на n . Ранг этой матрицы равен n . Следовательно, векторная система e ( 1 ) , e ( 2 ) , . . . , e ( n ) является линейно независимой. При этом к системе невозможно добавить ни одного вектора, не нарушив ее линейной независимости.
Так как число векторов в системе равно n , то размерность пространства n -мерных векторов равна n , а единичные векторы e ( 1 ) , e ( 2 ) , . . . , e ( n ) являются базисом указанного пространства.
Из полученного определения сделаем вывод: любая система n -мерных векторов, в которой число векторов меньше n , не является базисом пространства.
Если мы поменяем местами первый и второй вектор, получим систему векторов e ( 2 ) , e ( 1 ) , . . . , e ( n ) . Она также будет являться базисом n -мерного векторного пространства. Составим матрицу, взяв за ее строки векторы полученной системы. Матрица может быть получена из единичной матрицы перестановкой местами первых двух строк, ранг ее будет равен n . Система e ( 2 ) , e ( 1 ) , . . . , e ( n ) линейно независима и является базисом n -мерного векторного пространства.
Переставив местами в исходной системе другие векторы, получим еще один базис.
Мы можем взять линейно независимую систему неединичных векторов, и она также будет представлять собой базис n -мерного векторного пространства.
Векторное пространство с размерностью n имеет столько базисов, сколько существует линейно независимых систем из n -мерных векторов числом n.
Плоскость является двумерным пространством – ее базисом будут два любых неколлинеарных вектора. Базисом трехмерного пространства послужат три любых некомпланарных вектора.
Рассмотрим применение данной теории на конкретных примерах.
Исходные данные: векторы
a = ( 3 , — 2 , 1 ) b = ( 2 , 1 , 2 ) c = ( 3 , — 1 , — 2 )
Необходимо определить, являются ли указанные векторы базисом трехмерного векторного пространства.
Решение
Для решения поставленной задачи исследуем заданную систему векторов на линейную зависимость. Составим матрицу, где строки – координаты векторов. Определим ранг матрицы.
A = 3 2 3 — 2 1 — 1 1 2 — 2 A = 3 — 2 1 2 1 2 3 — 1 — 2 = 3 · 1 · ( — 2 ) + ( — 2 ) · 2 · 3 + 1 · 2 · ( — 1 ) — 1 · 1 · 3 — ( — 2 ) · 2 · ( — 2 ) — 3 · 2 · ( — 1 ) = = — 25 ≠ 0 ⇒ R a n k ( A ) = 3
Следовательно, заданные условием задачи векторы линейно независимы, и их численность равна размерности векторного пространства – они являются базисом векторного пространства.
Ответ: указанные векторы являются базисом векторного пространства.
Исходные данные: векторы
a = ( 3 , — 2 , 1 ) b = ( 2 , 1 , 2 ) c = ( 3 , — 1 , — 2 ) d = ( 0 , 1 , 2 )
Необходимо определить, может ли указанная система векторов являться базисом трехмерного пространства.
Решение
Указанная в условии задачи система векторов является линейно зависимой, т.к. максимальное число линейно независимых векторов равно 3. Таким образом, указанная система векторов не может служить базисом трехмерного векторного пространства. Но стоит отметить, что подсистема исходной системы a = ( 3 , — 2 , 1 ) , b = ( 2 , 1 , 2 ) , c = ( 3 , — 1 , — 2 ) является базисом.
Ответ: указанная система векторов не является базисом.
Исходные данные: векторы
a = ( 1 , 2 , 3 , 3 ) b = ( 2 , 5 , 6 , 8 ) c = ( 1 , 3 , 2 , 4 ) d = ( 2 , 5 , 4 , 7 )
Могут ли они являться базисом четырехмерного пространства?
Решение
Cоставим матрицу, используя в качестве строк координаты заданных векторов
A = 1 2 3 3 2 5 6 8 1 3 2 4 2 5 4 7
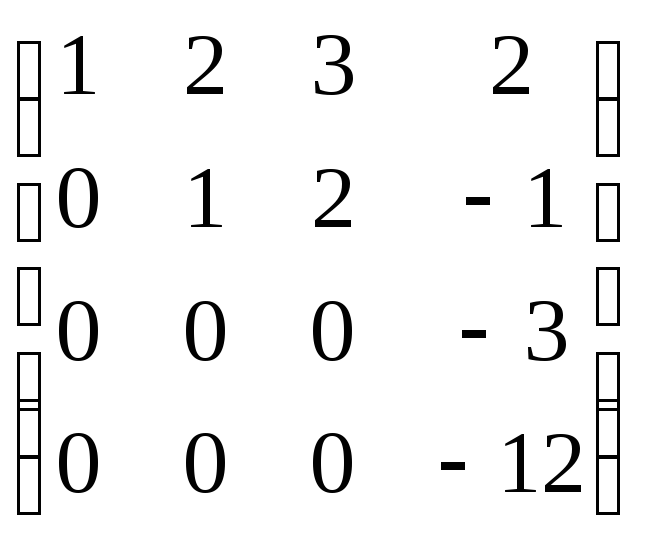
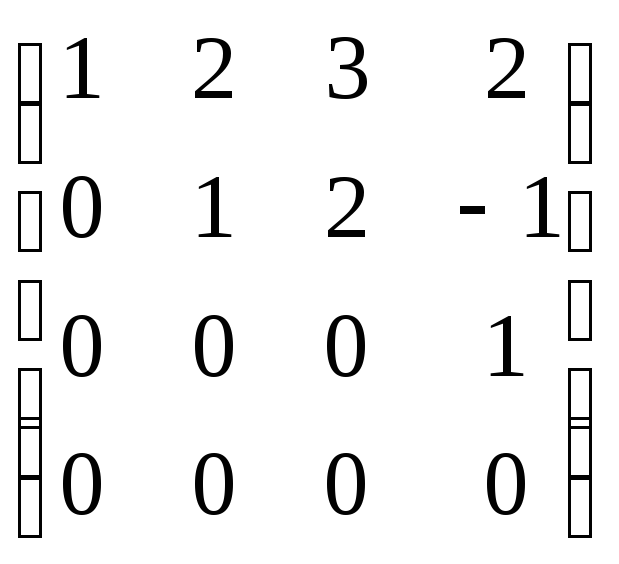
По методу Гаусса определим ранг матрицы:
A = 1 2 3 3 2 5 6 8 1 3 2 4 2 5 4 7
1 2 3 3 0 1 0 2 0 1 — 1 1 0 1 — 2 1
1 2 3 3 0 1 0 2 0 0 — 1 — 1 0 0 — 2 — 1
1 2 3 3 0 1 0 2 0 0 — 1 — 1 0 0 0 1 ⇒ ⇒ R a n k ( A ) = 4
Следовательно, система заданных векторов линейно независима и их численность равна размерности векторного пространства – они являются базисом четырехмерного векторного пространства.
Ответ: заданные векторы являются базисом четырехмерного пространства.
Исходные данные: векторы
a ( 1 ) = ( 1 , 2 , — 1 , — 2 ) a ( 2 ) = ( 0 , 2 , 1 , — 3 ) a ( 3 ) = ( 1 , 0 , 0 , 5 )
Составляют ли они базис пространства размерностью 4?
Решение
Исходная система векторов линейно независима, но численность векторов в ней недостаточна, чтобы стать базисом четырехмерного пространства.
Ответ: нет, не составляют.
Разложение вектора по базису
Примем, что произвольные векторы e ( 1 ) , e ( 2 ) , . . . , e ( n ) являются базисом векторного n-мерного пространства. Добавим к ним некий n -мерный вектор x → : полученная система векторов станет линейно зависимой. Свойства линейной зависимости гласят, что хотя бы один из векторов такой системы может линейно выражаться через остальные. Переформулируя это утверждение, можно говорить о том, что хотя бы один из векторов линейно зависимой системы может раскладываться по остальным векторам.
Таким образом, мы пришли к формулировке важнейшей теоремы:
Любой вектор n -мерного векторного пространства единственным образом раскладывается по базису.
Докажем эту теорему:
зададим базис n -мерного векторного пространства — e ( 1 ) , e ( 2 ) , . . . , e ( n ) . Сделаем систему линейно зависимой, добавив к ней n -мерный вектор x → . Этот вектор может быть линейно выражен через исходные векторы e :
x = x 1 · e ( 1 ) + x 2 · e ( 2 ) + . . . + x n · e ( n ) , где x 1 , x 2 , . . . , x n — некоторые числа.
Теперь докажем, что такое разложение является единственным. Предположим, что это не так и существует еще одно подобное разложение:
Отнимем от левой и правой частей этого равенства соответственно левую и правую части равенства x = x 1 · e ( 1 ) + x 2 · e ( 2 ) + . . . + x n · e ( n ) . Получим:
1 — x 1 ) · e ( 1 ) + ( x
2 — x 2 ) · e ( 2 ) + . . . ( x
Система базисных векторов e ( 1 ) , e ( 2 ) , . . . , e ( n ) линейно независима; по определению линейной независимости системы векторов равенство выше возможно только тогда, когда все коэффициенты ( x
2 — x 2 ) , . . . , ( x
n — x n ) будут равны нулю. Из чего справедливым будет: x 1 = x
n . И это доказывает единственный вариант разложения вектора по базису.
При этом коэффициенты x 1 , x 2 , . . . , x n называются координатами вектора x → в базисе e ( 1 ) , e ( 2 ) , . . . , e ( n ) .
Доказанная теория делает понятным выражение «задан n -мерный вектор x = ( x 1 , x 2 , . . . , x n ) »: рассматривается вектор x → n -мерного векторного пространства, и его координаты заданы в некотором базисе. При этом также понятно, что этот же вектор в другом базисе n -мерного пространства будет иметь другие координаты.
Рассмотрим следующий пример: допустим, что в некотором базисе n -мерного векторного пространства задана система из n линейно независимых векторов
e ( 1 ) = ( e 1 ( 1 ) , e 2 ( 1 ) , . . . , e n ( 1 ) ) e ( 2 ) = ( e 1 ( 2 ) , e 2 ( 2 ) , . . . , e n ( 2 ) ) ⋮ e ( n ) = ( e 1 ( n ) , e 2 ( n ) , . . . , e n ( n ) )
а также задан вектор x = ( x 1 , x 2 , . . . , x n ) .
Векторы e 1 ( 1 ) , e 2 ( 2 ) , . . . , e n ( n ) в этом случае также являются базисом этого векторного пространства.
Предположим, что необходимо определить координаты вектора x → в базисе e 1 ( 1 ) , e 2 ( 2 ) , . . . , e n ( n ) , обозначаемые как x
Вектор x → будет представлен следующим образом:
2 · e ( 2 ) + . . . + x
Запишем это выражение в координатной форме:
( x 1 , x 2 , . . . , x n ) = x
1 · ( e ( 1 ) 1 , e ( 1 ) 2 , . . . , e ( 1 ) n ) + x
2 · ( e ( 2 ) 1 , e ( 2 ) 2 , . . . , e ( 2 ) n ) + . . . + + x
n · ( e ( n ) 1 , e ( n ) 2 , . . . , e ( n ) n ) = = ( x
2 e 1 ( 2 ) + . . . + x
2 e 2 ( 2 ) + + . . . + x
n e 2 ( n ) , . . . , x
2 e n ( 2 ) + . . . + x
Полученное равенство равносильно системе из n линейных алгебраических выражений с n неизвестными линейными переменными x
n e 2 n ⋮ x n = x
Матрица этой системы будет иметь следующий вид:
e 1 ( 1 ) e 1 ( 2 ) ⋯ e 1 ( n ) e 2 ( 1 ) e 2 ( 2 ) ⋯ e 2 ( n ) ⋮ ⋮ ⋮ ⋮ e n ( 1 ) e n ( 2 ) ⋯ e n ( n )
Пусть это будет матрица A , и ее столбцы – векторы линейно независимой системы векторов e 1 ( 1 ) , e 2 ( 2 ) , . . . , e n ( n ) . Ранг матрицы – n , и ее определитель отличен от нуля. Это свидетельствует о том, что система уравнений имеет единственное решение, определяемое любым удобным способом: к примеру, методом Крамера или матричным методом. Таким образом мы сможем определить координаты x
n вектора x → в базисе e 1 ( 1 ) , e 2 ( 2 ) , . . . , e n ( n ) .
Применим рассмотренную теорию на конкретном примере.
Исходные данные: в базисе трехмерного пространства заданы векторы
e ( 1 ) = ( 1 , — 1 , 1 ) e ( 2 ) = ( 3 , 2 , — 5 ) e ( 3 ) = ( 2 , 1 , — 3 ) x = ( 6 , 2 , — 7 )
Необходимо подтвердить факт, что система векторов e ( 1 ) , e ( 2 ) , e ( 3 ) также служит базисом заданного пространства, а также определить координаты вектора х в заданном базисе.
Решение
Система векторов e ( 1 ) , e ( 2 ) , e ( 3 ) будет являться базисом трехмерного пространства, если она линейно независима. Выясним эту возможность, определив ранг матрицы A , строки которой – заданные векторы e ( 1 ) , e ( 2 ) , e ( 3 ) .
Используем метод Гаусса:
A = 1 — 1 1 3 2 — 5 2 1 — 3
1 — 1 1 0 5 — 8 0 3 — 5
1 — 1 1 0 5 — 8 0 0 — 1 5
R a n k ( A ) = 3 . Таким образом, система векторов e ( 1 ) , e ( 2 ) , e ( 3 ) линейно независима и является базисом.
Пусть в базисе вектор x → имеет координаты x
3 . Связь этих координат определяется уравнением:
3 e 1 ( 3 ) x 2 = x
3 e 2 ( 3 ) x 3 = x
Применим значения согласно условиям задачи:
Решим систему уравнений методом Крамера:
∆ = 1 3 2 — 1 2 1 1 — 5 — 3 = — 1 ∆ x
1 = 6 3 2 2 2 1 — 7 — 5 — 3 = — 1 , x
1 ∆ = — 1 — 1 = 1 ∆ x
2 = 1 6 2 — 1 2 1 1 — 7 — 3 = — 1 , x
2 ∆ = — 1 — 1 = 1 ∆ x
3 = 1 3 6 — 1 2 2 1 — 5 — 7 = — 1 , x
Так, вектор x → в базисе e ( 1 ) , e ( 2 ) , e ( 3 ) имеет координаты x
Ответ: x = ( 1 , 1 , 1 )
Связь между базисами
Предположим, что в некотором базисе n-мерного векторного пространства даны две линейно независимые системы векторов:
c ( 1 ) = ( c 1 ( 1 ) , c 2 ( 1 ) , . . . , c n ( 1 ) ) c ( 2 ) = ( c 1 ( 2 ) , c 2 ( 2 ) , . . . , c n ( 2 ) ) ⋮ c ( n ) = ( c 1 ( n ) , e 2 ( n ) , . . . , c n ( n ) )
e ( 1 ) = ( e 1 ( 1 ) , e 2 ( 1 ) , . . . , e n ( 1 ) ) e ( 2 ) = ( e 1 ( 2 ) , e 2 ( 2 ) , . . . , e n ( 2 ) ) ⋮ e ( n ) = ( e 1 ( n ) , e 2 ( n ) , . . . , e n ( n ) )
Указанные системы являются также базисами заданного пространства.
n ( 1 ) — координаты вектора c ( 1 ) в базисе e ( 1 ) , e ( 2 ) , . . . , e ( 3 ) , тогда связь координат будет задаваться системой линейных уравнений:
1 ( 1 ) e 1 ( 1 ) + c
2 ( 1 ) e 1 ( 2 ) + . . . + c
n ( 1 ) e 1 ( n ) с 2 ( 1 ) = c
1 ( 1 ) e 2 ( 1 ) + c
2 ( 1 ) e 2 ( 2 ) + . . . + c
n ( 1 ) e 2 ( n ) ⋮ с n ( 1 ) = c
1 ( 1 ) e n ( 1 ) + c
2 ( 1 ) e n ( 2 ) + . . . + c
В виде матрицы систему можно отобразить так:
( c 1 ( 1 ) , c 2 ( 1 ) , . . . , c n ( 1 ) ) = ( c
n ( 1 ) ) · e 1 ( 1 ) e 2 ( 1 ) … e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) … e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) … e n ( n )
Сделаем по аналогии такую же запись для вектора c ( 2 ) :
( c 1 ( 2 ) , c 2 ( 2 ) , . . . , c n ( 2 ) ) = ( c
n ( 2 ) ) · e 1 ( 1 ) e 2 ( 1 ) … e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) … e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) … e n ( n )
И, далее действуя по тому же принципу, получаем:
( c 1 ( n ) , c 2 ( n ) , . . . , c n ( n ) ) = ( c
n ( n ) ) · e 1 ( 1 ) e 2 ( 1 ) … e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) … e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) … e n ( n )
Матричные равенства объединим в одно выражение:
c 1 ( 1 ) c 2 ( 1 ) ⋯ c n ( 1 ) c 1 ( 2 ) c 2 ( 2 ) ⋯ c n ( 2 ) ⋮ ⋮ ⋮ ⋮ c 1 ( n ) c 2 ( n ) ⋯ c n ( n ) = c
n ( n ) · e 1 ( 1 ) e 2 ( 1 ) ⋯ e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) ⋯ e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) ⋯ e n ( n )
Оно и будет определять связь векторов двух различных базисов.
Используя тот же принцип, возможно выразить все векторы базиса e ( 1 ) , e ( 2 ) , . . . , e ( 3 ) через базис c ( 1 ) , c ( 2 ) , . . . , c ( n ) :
e 1 ( 1 ) e 2 ( 1 ) ⋯ e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) ⋯ e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) ⋯ e n ( n ) = e
n ( n ) · c 1 ( 1 ) c 2 ( 1 ) ⋯ c n ( 1 ) c 1 ( 2 ) c 2 ( 2 ) ⋯ c n ( 2 ) ⋮ ⋮ ⋮ ⋮ c 1 ( n ) c 2 ( n ) ⋯ c n ( n )
Дадим следующие определения:
n ( n ) является матрицей перехода от базиса e ( 1 ) , e ( 2 ) , . . . , e ( 3 )
к базису c ( 1 ) , c ( 2 ) , . . . , c ( n ) .
n ( n ) является матрицей перехода от базиса c ( 1 ) , c ( 2 ) , . . . , c ( n )
к базису e ( 1 ) , e ( 2 ) , . . . , e ( 3 ) .
http://bstudy.net/719717/estestvoznanie/algoritm_nahozhdeniya_bazisa_sistemy_vektorov
http://zaochnik.com/spravochnik/matematika/vektory/vektornoe-prostranstvo/
В данной публикации мы рассмотрим, каким образом можно разложить вектор по двум базисным векторам, а также разберем пример решения задачи по этой теме.
- Принцип разложения вектора
- Пример задачи
Принцип разложения вектора
Для того, чтобы разложить вектор b по базисным векторам a1, …, an, требуется определить такие коэффициенты x1, …, xn, при которых линейная комбинация векторов a1, …, an равняется вектору b, то есть:
x1a1 + … + xnan = b
где x1, …, xn – координаты вектора b в базисе a1, …, an
Пример задачи
Разложим вектор b = {16; 1} по двум базисным векторам m = {2; 1} и n = {1; -3}.
Решение:
1. Векторное уравнение выглядит так:
xm + yn = b
2. Представим его в виде системы линейных уравнений:
![]()
3. Теперь нужно решить систему. Из второго уравнения получаем:
x = 1 + 3y.
Подставляем полученное выражение в первое уравнение:
2 · (1 + 3y) + y = 16
2 + 6y + y = 16
7y = 14
y = 2
Следовательно, x = 1 + 3y = 1 + 2 · 2 = 7.
Ответ: b = 7m + 2n.