Рано или поздно при изучении курса физики ученики и студенты сталкиваются с задачами на силу упругости и закон Гука, в которых фигурирует коэффициент жесткости пружины. Что же это за величина, и как она связана с деформацией тел и законом Гука?
Содержание:
- Сила упругости и закон Гука
- Определение коэффициента жесткости
- Расчет жесткости системы
- Последовательное соединение системы пружин
- Параллельное соединение системы пружин
- Вычисление коэффициента жесткости опытным методом
- Примеры задач на нахождение жесткости
- Видео
Сила упругости и закон Гука
Для начала определим основные термины, которые будут использоваться в данной статье. Известно, если воздействовать на тело извне, оно либо приобретет ускорение, либо деформируется. Деформация — это изменение размеров или формы тела под влиянием внешних сил. Если объект полностью восстанавливается после прекращения нагрузки, то такая деформация считается упругой; если же тело остается в измененном состоянии (например, согнутом, растянутом, сжатым и т. д. ), то деформация пластическая.
Примерами пластических деформаций являются:
- лепка из глины;
- погнутая алюминиевая ложка.
В свою очередь, упругими деформациями будут считаться:
- резинка (можно растянуть ее, после чего она вернется в исходное состояние);
- пружина (после сжатия снова распрямляется).
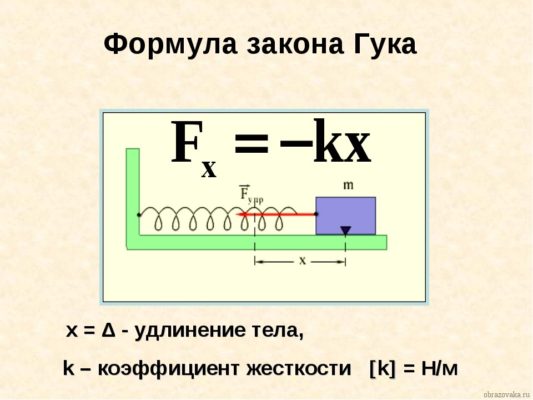
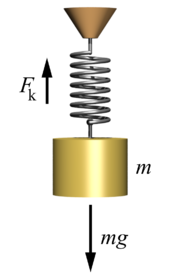
В результате упругой деформации тела (в частности, пружины) в нем возникает сила упругости, равная по модулю приложенной силе, но направленная в противоположную сторону. Сила упругости для пружины будет пропорциональна ее удлинению. Математически это можно записать таким образом:
F = — k·x;
где F — сила упругости, x — расстояние, на которое изменилась длина тела в результате растяжения, k — необходимый для нас коэффициент жесткости. Указанная выше формула также является частным случаем закона Гука для тонкого растяжимого стержня. В общей форме этот закон формулируется так: «Деформация, возникшая в упругом теле, будет пропорциональна силе, которая приложена к данному телу». Он справедлив только в тех случаях, когда речь идет о малых деформациях (растяжение или сжатие намного меньше длины исходного тела).

Определение коэффициента жесткости
Коэффициент жесткости (он также имеет названия коэффициента упругости или пропорциональности) чаще всего записывается буквой k, но иногда можно встретить обозначение D или c. Численно жесткость будет равна величине силы, которая растягивает пружину на единицу длины (в случае СИ — на 1 метр). Формула для нахождения коэффициента упругости выводится из частного случая закона Гука:
k = F/x.
Чем больше величина жесткости, тем больше будет сопротивление тела к его деформации. Также коэффициент Гука показывает, насколько устойчиво тело к действию внешней нагрузки. Зависит этот параметр от геометрических параметров (диаметра проволоки, числа витков и диаметра намотки от оси проволоки) и от материала, из которого она изготовлена.
Единица измерения жесткости в СИ — Н/м.
Расчет жесткости системы
Встречаются более сложные задачи, в которых необходим расчет общей жесткости. В таких заданиях пружины соединены последовательно или параллельно.
Последовательное соединение системы пружин
При последовательном соединении общая жесткость системы уменьшается. Формула для расчета коэффициента упругости будет иметь следующий вид:
1/k = 1/k1 + 1/k2 + … + 1/ki,
где k — общая жесткость системы, k1, k2, …, ki — отдельные жесткости каждого элемента, i — общее количество всех пружин, задействованных в системе.

Параллельное соединение системы пружин
В случае когда пружины соединены параллельно, величина общего коэффициента упругости системы будет увеличиваться. Формула для расчета будет выглядеть так:
k = k1 + k2 + … + ki.
Измерение жесткости пружины опытным путем — в этом видео.
Вычисление коэффициента жесткости опытным методом
С помощью несложного опыта можно самостоятельно рассчитать, чему будет равен коэффициент Гука. Для проведения эксперимента понадобятся:
- линейка;
- пружина;
- груз с известной массой.
Последовательность действий для опыта такова:
- Необходимо закрепить пружину вертикально, подвесив ее к любой удобной опоре. Нижний край должен остаться свободным.
- При помощи линейки измеряется ее длина и записывается как величина x1.
- На свободный конец нужно подвесить груз с известной массой m.
- Длина пружины измеряется в нагруженном состоянии. Обозначается величиной x2.
- Подсчитывается абсолютное удлинение: x = x2-x1. Для того чтобы получить результат в международной системе единиц, лучше сразу перевести его из сантиметров или миллиметров в метры.
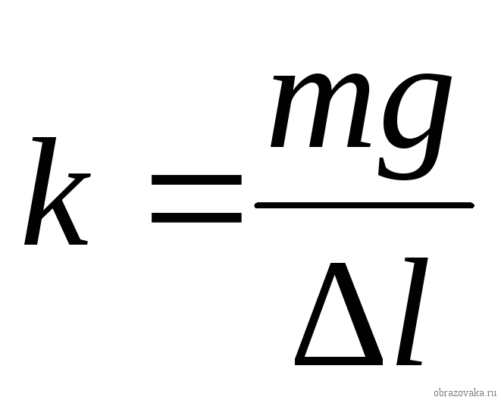
- Сила, которая вызвала деформацию, — это сила тяжести тела. Формула для ее расчета — F = mg, где m — это масса используемого в эксперименте груза (переводится в кг), а g — величина свободного ускорения, равная приблизительно 9,8.
- После проведенных расчетов остается найти только сам коэффициент жесткости, формула которого была указана выше: k = F/x.
Примеры задач на нахождение жесткости
Задача 1
На пружину длиной 10 см действует сила F = 100 Н. Длина растянутой пружины составила 14 см. Найти коэффициент жесткости.
- Рассчитываем длину абсолютного удлинения: x = 14—10 = 4 см = 0,04 м.
- По формуле находим коэффициент жесткости: k = F/x = 100 / 0,04 = 2500 Н/м.
Ответ: жесткость пружины составит 2500 Н/м.
Задача 2
Груз массой 10 кг при подвешивании на пружину растянул ее на 4 см. Рассчитать, на какую длину растянет ее другой груз массой 25 кг.
- Найдем силу тяжести, деформирующей пружину: F = mg = 10 · 9.8 = 98 Н.
- Определим коэффициент упругости: k = F/x = 98 / 0.04 = 2450 Н/м.
- Рассчитаем, с какой силой действует второй груз: F = mg = 25 · 9.8 = 245 Н.
- По закону Гука запишем формулу для абсолютного удлинения: x = F/k.
- Для второго случая подсчитаем длину растяжения: x = 245 / 2450 = 0,1 м.
Ответ: во втором случае пружина растянется на 10 см.
Видео
Из этого видео вы узнаете, как определить жесткость пружины.
Закон Гука

4.3
Средняя оценка: 4.3
Всего получено оценок: 764.
4.3
Средняя оценка: 4.3
Всего получено оценок: 764.
Закон Гука был открыт в XVII веке англичанином Робертом Гуком. Это открытие о растяжении пружины является одним из законов теории упругости и выполняет важную роль в науке и технике.
Определение и формула закона Гука
Формулировка этого закона выглядит следующим образом: сила упругости, которая появляется в момент деформации тела, пропорциональна удлинению тела и направлена противоположно движению частиц этого тела относительно других частиц при деформации.
Математическая запись закона выглядит так:
где Fупр – соответственно сила упругости, x – удлинение тела (расстояние, на которое изменяется исходная длина тела), а k – коэффициент пропорциональности, называемый жесткостью тела. Сила измеряется в Ньютонах, а удлинение тела – в метрах.
Для раскрытия физического смысла жесткости, нужно в формулу для закона Гука подставить единицу, в которой измеряется удлинение – 1 м, заранее получив выражение для k.
Эта формула показывает, что жесткость тела численно равна силе упругости, которая возникает в теле (пружине), когда оно деформируется на 1 м. Известно, что жесткость пружины зависит от ее формы, размера и материала, из которого произведено данное тело.
Сила упругости
Теперь, когда известно, какая формула выражает закон Гука, необходимо разобраться в его основной величине. Основной величиной является сила упругости. Она появляется в определенный момент, когда тело начинает деформироваться, например, когда пружина сжимается или растягивается. Она направлена в обратную сторону от силы тяжести. Когда сила упругости и сила тяжести, действующие на тело, становятся равными, опора и тело останавливаются.
Деформация – это необратимые изменения, происходящие с размерами тела и его формой. Они связанны с перемещением частиц относительно друг друга. Если человек сядет в мягкое кресло, то с креслом произойдет деформация, то есть изменятся его характеристики. Она бывает разных типов: изгиб, растяжение, сжатие, сдвиг, кручение.
Так как сила упругости относится по своему происхождению к электромагнитным силам, следует знать, что возникает она из-за того, что молекулы и атомы – наименьшие частицы, из которых состоят все тела, притягиваются друг другу и отталкиваются друг от друга. Если расстояние между частицами очень мало, значит, на них влияет сила отталкивания. Если же это расстояние увеличить, то на них будет действовать сила притяжения. Таким образом, разность сил притяжения и сил отталкивания проявляется в силах упругости.
Сила упругости включает в себя силу реакции опоры и вес тела. Сила реакции представляет особый интерес. Это такая сила, которая действует на тело, когда его кладут на какую-либо поверхность. Если же тело подвешено, то силу, действующую на него, называют, силой натяжения нити.
Особенности сил упругости
Как мы уже выяснили, сила упругости возникает при деформации, и направлена она на восстановление первоначальных форм и размеров строго перпендикулярно к деформируемой поверхности. У сил упругости также есть ряд особенностей.
- они возникают во время деформации;
- они появляются у двух деформируемых тел одновременно;
- они находятся перпендикулярно поверхности, по отношению к которой тело деформируется.
- они противоположны по направлению смещению частиц тела.
Применение закона на практике
Закон Гука применяется как в технических и высокотехнологичных устройствах, так и в самой природе. Например, силы упругости встречаются в часовых механизмах, в амортизаторах на транспорте, в канатах, резинках и даже в человеческих костях. Принцип закона Гука лежит в основе динамометра – прибора, с помощью которого измеряют силу.


Что мы узнали?
Статья подробно знакомит учащихся с материалом о том, как формулируется обобщенный закон Гука, который изучают в 7 классе, и его основной величине – силе упругости.
Тест по теме
Доска почёта
Чтобы попасть сюда — пройдите тест.
-

Тимур Катаев
10/10
-
Влад Демченко
7/10
-
Александр Коновалов
10/10
-
Октябрина Баева
10/10
-
Киара Кольт
8/10
-
Алина Фесова
9/10
-
Яніна Резніченко
8/10
-
Артемий Здор
8/10
-
Александра Щербина
9/10
-
Катя Пу
10/10
Оценка доклада
4.3
Средняя оценка: 4.3
Всего получено оценок: 764.
А какая ваша оценка?
Содержание материала
- Сила упругости и закон Гука
- Видео
- Примеры задач на нахождение жесткости
- Вычисление коэффициента жесткости опытным методом
- Коэффициент жесткости соединений пружин
- Основные характеристики пружин
- Материал и сила жесткости пружины
- Как связана жесткость пружины с диаметром и формой сечения проволоки, из которой она сделана
- Какой формулой определяется коэффициент жесткости соединения из двух параллельных пружин?
- Вчемизмеряется жесткость
- Как появился первый вариант формулы
- Что такое жесткость в физике?
- Практические занятия
- Основная методика для вычислений
- Решение задач
- Определение коэффициента жесткости
- Единицы измерения
- Деформация
- Расчет жесткости цилиндрической пружины
- Параллельное и последовательное соединение пружин
- Последовательное соединение системы пружин
- Параллельное соединение системы пружин
- Особенности расчета жесткости соединений пружин
Сила упругости и закон Гука
Для начала определим основные термины, которые будут использоваться в данной статье. Известно, если воздействовать на тело извне, оно либо приобретет ускорение, либо деформируется. Деформация — это изменение размеров или формы тела под влиянием внешних сил. Если объект полностью восстанавливается после прекращения нагрузки, то такая деформация считается упругой; если же тело остается в измененном состоянии (например, согнутом, растянутом, сжатым и т. д. ), то деформация пластическая.
Примеры задач на нахождение жесткости
Задача 1
На пружину длиной 10 см действует сила F = 100 Н. Длина растянутой пружины составила 14 см. Найти коэффициент жесткости.
- Рассчитываем длину абсолютного удлинения: x = 14—10 = 4 см = 0,04 м.
- По формуле находим коэффициент жесткости: k = F/x = 100 / 0,04 = 2500 Н/м.
Ответ: жесткость пружины составит 2500 Н/м.
Задача 2
Груз массой 10 кг при подвешивании на пружину растянул ее на 4 см. Рассчитать, на какую длину растянет ее другой груз массой 25 кг.
- Найдем силу тяжести, деформирующей пружину: F = mg = 10 · 9.8 = 98 Н.
- Определим коэффициент упругости: k = F/x = 98 / 0.04 = 2450 Н/м.
- Рассчитаем, с какой силой действует второй груз: F = mg = 25 · 9.8 = 245 Н.
- По закону Гука запишем формулу для абсолютного удлинения: x = F/k.
- Для второго случая подсчитаем длину растяжения: x = 245 / 2450 = 0,1 м.
Ответ: во втором случае пружина растянется на 10 см.
Видео
Вычисление коэффициента жесткости опытным методом
С помощью несложного опыта можно самостоятельно рассчитать, чему будет равен коэффициент Гука. Для проведения эксперимента понадобятся:
- линейка;
- пружина;
- груз с известной массой.
Последовательность действий для опыта такова:
- Необходимо закрепить пружину вертикально, подвесив ее к любой удобной опоре. Нижний край должен остаться свободным.
- При помощи линейки измеряется ее длина и записывается как величина x1.
- На свободный конец нужно подвесить груз с известной массой m.
- Длина пружины измеряется в нагруженном состоянии. Обозначается величиной x2.
- Подсчитывается абсолютное удлинение: x = x2-x1. Для того чтобы получить результат в международной системе единиц, лучше сразу перевести его из сантиметров или миллиметров в метры.
- Сила, которая вызвала деформацию, — это сила тяжести тела. Формула для ее расчета — F = mg, где m — это масса используемого в эксперименте груза (переводится в кг), а g — величина свободного ускорения, равная приблизительно 9,8.
- После проведенных расчетов остается найти только сам коэффициент жесткости, формула которого была указана выше: k = F/x.
Коэффициент жесткости соединений пружин
Приведенный выше показатель коэффициента жесткости детали при параллельном или последовательном соединении определяет многие характеристики соединения. Довольно часто проводится определение тому, чему равно удлинение пружины. Среди особенностей параллельного или последовательного соединения можно отметить нижеприведенные моменты:
- При параллельном подключении удлинение обоих изделий будет равным. Не стоит забывать о том, что оба варианта должны характеризоваться одинаковой длиной в свободном положении. При последовательном показатель увеличивается в два раза.
- Свободное положение – ситуация, в которой деталь находится без прикладывания нагрузки. Именно оно в большинстве случаев учитывается при проведении расчетов.
- Коэффициент жесткости изменяется в зависимости от применяемого способа подсоединения. В случае параллельного соединения показатель увеличивается в два раза, при последовательном уменьшается.

Для проведения расчетов нужно построить схему подключения всех элементов. Основание представлено линией со штриховкой, изделие обозначается схематически, а тело в упрощенном виде. Кроме этого, от упругой деформации во многом зависит кинетическая и другая энергия.
Основные характеристики пружин
Зная материал и диаметр проволоки, форму её сечения, длину и диаметр пружины, как единого целого, можно с очень высокой достоверностью судить, насколько пружина может сопротивляться попыткам деформировать себя. Существуют также другие характеристики, от которых работоспособность пружины может зависеть очень серьёзно. К таковым относятся усталость материала проволоки, шаг витка, индекс пружины и т. д.
Материал и сила жесткости пружины
Зависимость между этими характеристиками пружин индивидуальная и вычисляется опытным путём. Чаще всего для изготовления металлических пружин используют высокоуглеродистые стали, легированные ванадием, кремнием и марганцем. Для изделий, предназначенных для длительной работы в агрессивных средах используют нержавеющую сталь, оловянносвинцовую, бериллиевую и кремнемарганцевую бронзу, различные чугуны, а также некоторые из титановых сплавов.
Небольшие пружины изготавливают из уже закалённой проволоки. Крупные изделия делают из отожжённой стали, а закалку проводят уже после формовки.
Как связана жесткость пружины с диаметром и формой сечения проволоки, из которой она сделана
Чем он меньше, тем пружина более эластична. Способность запасать энергию с уменьшением диаметра тоже становится меньше. Пружины сжатия, как правило, делают из более толстой проволоки.
Следует отметить, что не всегда сечение проволоки для пружин бывает круглым, в пружинах сжатия оно иногда бывает уплощённым. Это обеспечивает лучшую посадку одного витка на другой и делает конструкцию более устойчивой.
Какой формулой определяется коэффициент жесткости соединения из двух параллельных пружин?
Параллельное соединение системы пружин В случае когда пружины соединены параллельно, величина общего коэффициента упругости системы будет увеличиваться. Формула для расчета будет выглядеть так: k = k1 + k2 + … + ki.
Вчемизмеряется жесткость
Жесткость пружины в системе СИ измеряется в ньютонах на метр, Н/м. Также встречается единица измерения ньютон на миллиметр, Н/мм. Численно жесткость равна величине силы, изменяющей размер пружины на метр длины.
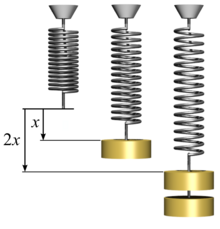
Как появился первый вариант формулы
Формула для расчета жесткости пружины, которая получила название закона Гука, была установлена экспериментально. В процессе опытов с подвешенными на упругом элементе грузами разной массы замерялась величина его растяжения. Так и выяснилось, что одна и та же испытуемая деталь под разными нагрузками претерпевает различные деформации. Причем подвешивание определенного количества гирек, одинаковых по массе, показало, что каждая добавленная/снятая гирька увеличивает/уменьшает длину упругого элемента на одинаковую величину.
В итоге этих экспериментов появилась такая формула: kx=mg, где k – некий постоянный для данной пружины коэффициент, x – изменение длины пружины, m – ее масса, а g – ускорение свободного падения (примерное значение – 9,8 м/с²).
Так было открыто свойство жесткости, которое, как и формула для определения коэффициента упругости, находит самое широкое применение в любой отрасли промышленности.
Что такое жесткость в физике?
Механи́ческая жёсткость (также жёсткость) — способность твёрдого тела, конструкции или её элементов сопротивляться деформации (изменению формы и/или размеров) от приложенного усилия вдоль выбранного направления в заданной системе координат. Обратная к характеристике называется механической податливостью.
Практические занятия
Механики и физики обозначают с помощью k, c и D коэффициент упругости, пропорциональности, жесткости. Смысл математической записи одинаковый. Численно показатель равняется силе, которая создаёт колебания на одну единицу длины. На практических работах по физике используется в качестве последней величины 1 метр.
Чем выше k, тем больше сопротивление предмета относительно деформации. Дополнительно коэффициент показывает степень устойчивости тела к колебаниям со стороны внешней нагрузки. Параметр зависит от длины и диаметра винтового изделия, количества витков, сырья. Единица измерения жесткости пружины — Н/м.
На практике перед школьниками и механиками может стоять более сложная задача, к примеру, найти общую жёсткость. В таком случае пружины соединены последовательным либо параллельным способом. В первом случае уменьшается суммарная жесткость. Если пружины расположены последовательно, используется следующая формула: 1/k = 1/k1 + 1/k2 + … + 1/ki, где:
- k — суммарная жёсткость соединений;
- k1 …ki — жёсткость каждого элемента системы;
- i — число пружин в цепи.
Если невесомые (расположены горизонтально) предметы соединены параллельно, значение общего k будет увеличиваться. Величина вычисляется по следующей формуле: k = k1 + k2 + … + ki.
Основная методика для вычислений
На практике коэффициент Гука определяется самостоятельно. Для эксперимента потребуется пружина, линейка, груз с определённой массой. Необходимо соблюдать следующую последовательность действий:
- Пружина фиксируется вертикально. Для этого используется любая удобная опора со свободной нижней частью.
- Линейкой измеряется длина предмета. Результат записывается как х1.
- На свободный конец подвешивается груз с известной массой m.
- Измеряется длина изделия под воздействием амплитуды. Вывод записывается как х2.
- Производит подсчёт абсолютного удлинения: x = x2-x1. Для определения энергии (силы) и k в международной системе СИ осуществляется перевод длины из разных единиц измерения в метры.
- Сила, спровоцировавшая деформацию, считается силой тяжести тела. Она рассчитывается по формуле: F = mg, где м является массой используемого груза (вес переводится в килограммы), а g (равен 9,8) — постоянная величина, с помощью которой отмечается ускорение свободного падения.
Если вышеописанные вычисления произведены, необходимо найти значение коэффициента жёсткости. Используется закон Гука, из которого следует, что k=F/x.
Решение задач
Для нахождения жёсткости в случае использования разных предметов, включая пружинные маятники с разной частотой колебаний, применяется формула Гука либо следствие, вытекающее из неё.
Задача № 1. Пружина имеет длину 10 см. На неё оказывается сила в 100 Н. Изделие растянулось на 14 см. Нужно найти k.
Решение: предварительно вычисляется абсолютное удлинение: 14−10=4 см. Результат переводится в метры: 0,04 м. Используя основную формулу, находится k. Его значение равняется 2500 Н/м.
Задача № 2. На пружину подвешивается груз массой 10 кг. Изделие растягивается на 4 см. Нужно найти длину, на которую растянется пружина, если использовать груз массой в 25 кг.
Решение: Определяется сила тяжести путем умножения 10 кг на 9.8. Результат записывается в Ньютонах. Определяется k=98/0.04=2450 Н/м. Рассчитывается, с какой силой воздействует второй груз: F=mg=245 Н. Для нахождения абсолютного удлинения используется формула x=F/k. Во втором случае х равняется 0,1 м.
Определение коэффициента жесткости
Коэффициент жесткости (он также имеет названия коэффициента упругости или пропорциональности) чаще всего записывается буквой k, но иногда можно встретить обозначение D или c. Численно жесткость будет равна величине силы, которая растягивает пружину на единицу длины (в случае СИ — на 1 метр). Формула для нахождения коэффициента упругости выводится из частного случая закона Гука:
k = F/x.
Чем больше величина жесткости, тем больше будет сопротивление тела к его деформации. Также коэффициент Гука показывает, насколько устойчиво тело к действию внешней нагрузки. Зависит этот параметр от геометрических параметров (диаметра проволоки, числа витков и диаметра намотки от оси проволоки) и от материала, из которого она изготовлена.
Единица измерения жесткости в СИ — Н/м.
Единицы измерения
При проводимых расчетах также должно учитываться то, в каких единицах измерениях проводятся вычисления. При рассмотрении того, чему равно удлинение пружины уделяется внимание единице измерения в Ньютонах.
Для того чтобы упростить выбор детали многие производители указывают его цветовым обозначением.
Разделение пружины по цветам проводится в сфере автомобилестроения.
Среди особенностей подобной маркировки отметим следующее:
- Класс А обозначается белым, желтым, оранжевым и коричневым оттенками.
- Класса В представлен синим, голубым, черным и желтым цветом.
Как правило, подобное свойство отмечается на внешней стороне витка. Производители наносят небольшую полоску, которая и существенно упрощает процесс выбора.
Деформация
Деформация — это изменение формы и размеров тела (или части тела) под действием внешних сил
Происходит деформация из-за различных факторов: при изменении температуры, влажности, фазовых превращениях и других воздействиях, вызывающих изменение положения частиц тела.
На появление того или иного вида деформации большое влияние оказывает характер приложенных к телу сил. Одни процессы деформации связаны с преимущественно перпендикулярно (нормально) приложенной силой, а другие — преимущественно с силой, приложенной по касательной.
По характеру приложенной к телу нагрузки виды деформации подразделяют следующим образом:
-
Деформация растяжения
-
Деформация сжатия
-
Деформация сдвига
-
Деформация при кручении
-
Деформация при изгибе
Расчет жесткости цилиндрической пружины
Довольно просто понять как работает плоская пружина. Если положить на край письменного стола линейку и прижать один ее конец рукой к поверхности, но второй можно упруго изгибать, запасая и высвобождая энергию. Очевидно, что в момент изгиба расстояния между молекулами материала в некоторых фрагментах линейки увеличиваются, в некоторых уменьшаются. Электромагнитные связи, действующие между молекулами, стремятся вернуть вещество к прежнему геометрическому состоянию.
Несколько сложнее дело обстоит с цилиндрической пружиной. В ней энергия запасается не благодаря деформации изгиба, а за счет скручивания проволоки, из которой пружина навита, относительно продольной оси этой проволоки.
Представим сильно увеличенное сечение проволоки, из которой навита цилиндрическая пружина, выполненное перпендикулярной ее оси плоскостью. При таком рассмотрении можно абстрагироваться от спиральной формы и мысленно разбить весь объем проволоки на множество соприкасающихся торцевыми поверхностями «цилиндров», диаметр которых равен диаметру проволоки, а высота стремится к нулю. Между соприкасающимися торцами действуют молекулярные силы, препятствующие деформации.
При растяжении или сжатии пружины угол наклона между витками изменяется. Соседние «цилиндры» при этом вращаются друг относительно друга в противоположных направлениях вокруг общей оси. В каждом таком сечении запасается энергия. Отсюда следует, что чем из более длинного куска проволоки навита пружина (здесь играют роль диаметр и высота цилиндра, а также шаг витка), тем большее количество энергии она способна запасти. Увеличение диаметра проволоки также повышает ее энергоемкость. В целом формула, учитывающая основные факторы жесткости пружины, выглядит так:
$k = frac{r^4}{4R^3} cdot frac{G}{n}$,
где:
- $R$ — радиус цилиндра пружины,
- $n$ — количество витков проволоки радиуса $r$,
- $G$ — коэффициент, зависящий от материала.
Пример 1
Рассчитать коэффициент жесткости пружины, выполненной из стальной проволоки с $G = 8 cdot 10^{10}$ Па и диаметром 1 мм. Радиус пружины 20 мм, количество витков — 25.
Подставим в формулу числовые значения, попутно переведя их в единицы системы СИ:
$k = frac{(10^{-3})^4}{4 cdot (2 cdot 10^{-2})^3} cdot frac{8 cdot 10^{10}}{25} = frac{8 cdot 10^{-2}}{10^2 cdot 2^3 cdot 10^{-6}} = 100$
Ответ: $100 frac{Н}{м}$
Получи деньги за свои студенческие работы
Курсовые, рефераты или другие работы
Параллельное и последовательное соединение пружин
В Законе Гука есть такая величина, как коэффициент жесткости— это характеристика тела, которая показывает его способность сопротивляться деформации. Чем больше коэффициент жесткости, тем больше эта способность, а как следствие из Закона Гука — и сила упругости.
Чаще всего эта характеристика используется для описания жесткости пружины. Но если мы соединим несколько пружин, то их суммарная жесткость нужно будет рассчитать. Разберемся, каким же образом.
Последовательное соединение системы пружин
Последовательное соединение характерно наличием одной точки соединения пружин.

При последовательном соединении общая жесткость системы уменьшается. Формула для расчета коэффициента упругости будет иметь следующий вид:
Коэффициент жесткости при последовательном соединении пружин
k — общая жесткость системы [Н/м]
k1, k2, …, ki — отдельные жесткости каждого элемента [Н/м]
i — общее количество всех пружин, задействованных в системе [-]
Параллельное соединение системы пружин
Последовательное соединение характерно наличием двух точек соединения пружин.

В случае когда пружины соединены параллельно величина общего коэффициента жесткости системы будет увеличиваться. Формула для расчета будет выглядеть так:
Коэффициент жесткости при параллельном соединении пружин
k — общая жесткость системы [Н/м]
k1, k2, …, ki — отдельные жесткости каждого элемента [Н/м]
i — общее количество всех пружин, задействованных в системе [-]
Задачка
Какова жесткость системы из двух пружин, жесткости которых k1 = 100 Н/м, k2 = 200 Н/м, соединенных: а) параллельно; б) последовательно?
Решение:
а) Рассмотрим параллельное соединение пружин.

При параллельном соединении пружин общая жесткость
k = k₁ + k₂ = 100 + 200 = 300 Н/м
б) Рассмотрим последовательное соединение пружин.

При последовательном соединении общая жесткость двух пружин
66,7 Н/м
Очень-очень важно!
Не забудь при расчете жесткости при последовательном соединении в конце перевернуть дробь.
Особенности расчета жесткости соединений пружин
Важный моментом является расчет нескольких упругих элементов, соединенных последовательно или параллельно.
При параллельном расположении нескольких деталей общая жесткость этой системы определяется простой суммой коэффициентов отдельных комплектующих. Как нетрудно заметить, жесткость системы больше, чем отдельной детали.
При последовательном расположении формула более сложная: величина, обратная суммарной жесткости, равна сумме величин, обратных к жесткости каждой комплектующей. В этом варианте сумма меньше слагаемых.
Используя эти зависимости, легко определиться с правильным выбором упругих комплектующих для конкретного случая.
Теги
Hooke’s law: the force is proportional to the extension

Bourdon tubes are based on Hooke’s law. The force created by gas pressure inside the coiled metal tube above unwinds it by an amount proportional to the pressure.
The balance wheel at the core of many mechanical clocks and watches depends on Hooke’s law. Since the torque generated by the coiled spring is proportional to the angle turned by the wheel, its oscillations have a nearly constant period.
In physics, Hooke’s law is an empirical law which states that the force (F) needed to extend or compress a spring by some distance (x) scales linearly with respect to that distance—that is, Fs = kx, where k is a constant factor characteristic of the spring (i.e., its stiffness), and x is small compared to the total possible deformation of the spring. The law is named after 17th-century British physicist Robert Hooke. He first stated the law in 1676 as a Latin anagram.[1][2] He published the solution of his anagram in 1678[3] as: ut tensio, sic vis («as the extension, so the force» or «the extension is proportional to the force»). Hooke states in the 1678 work that he was aware of the law since 1660.
Hooke’s equation holds (to some extent) in many other situations where an elastic body is deformed, such as wind blowing on a tall building, and a musician plucking a string of a guitar. An elastic body or material for which this equation can be assumed is said to be linear-elastic or Hookean.
Hooke’s law is only a first-order linear approximation to the real response of springs and other elastic bodies to applied forces. It must eventually fail once the forces exceed some limit, since no material can be compressed beyond a certain minimum size, or stretched beyond a maximum size, without some permanent deformation or change of state. Many materials will noticeably deviate from Hooke’s law well before those elastic limits are reached.
On the other hand, Hooke’s law is an accurate approximation for most solid bodies, as long as the forces and deformations are small enough. For this reason, Hooke’s law is extensively used in all branches of science and engineering, and is the foundation of many disciplines such as seismology, molecular mechanics and acoustics. It is also the fundamental principle behind the spring scale, the manometer, the galvanometer, and the balance wheel of the mechanical clock.
The modern theory of elasticity generalizes Hooke’s law to say that the strain (deformation) of an elastic object or material is proportional to the stress applied to it. However, since general stresses and strains may have multiple independent components, the «proportionality factor» may no longer be just a single real number, but rather a linear map (a tensor) that can be represented by a matrix of real numbers.
In this general form, Hooke’s law makes it possible to deduce the relation between strain and stress for complex objects in terms of intrinsic properties of the materials they are made of. For example, one can deduce that a homogeneous rod with uniform cross section will behave like a simple spring when stretched, with a stiffness k directly proportional to its cross-section area and inversely proportional to its length.
Formal definition
For linear springs
Consider a simple helical spring that has one end attached to some fixed object, while the free end is being pulled by a force whose magnitude is Fs. Suppose that the spring has reached a state of equilibrium, where its length is not changing anymore. Let x be the amount by which the free end of the spring was displaced from its «relaxed» position (when it is not being stretched). Hooke’s law states that

or, equivalently,

where k is a positive real number, characteristic of the spring. Moreover, the same formula holds when the spring is compressed, with Fs and x both negative in that case. According to this formula, the graph of the applied force Fs as a function of the displacement x will be a straight line passing through the origin, whose slope is k.
Hooke’s law for a spring is sometimes, but rarely, stated under the convention that Fs is the restoring force exerted by the spring on whatever is pulling its free end. In that case, the equation becomes

since the direction of the restoring force is opposite to that of the displacement.
General «scalar» springs
Hooke’s spring law usually applies to any elastic object, of arbitrary complexity, as long as both the deformation and the stress can be expressed by a single number that can be both positive and negative.
For example, when a block of rubber attached to two parallel plates is deformed by shearing, rather than stretching or compression, the shearing force Fs and the sideways displacement of the plates x obey Hooke’s law (for small enough deformations).
Hooke’s law also applies when a straight steel bar or concrete beam (like the one used in buildings), supported at both ends, is bent by a weight F placed at some intermediate point. The displacement x in this case is the deviation of the beam, measured in the transversal direction, relative to its unloaded shape.
The law also applies when a stretched steel wire is twisted by pulling on a lever attached to one end. In this case the stress Fs can be taken as the force applied to the lever, and x as the distance traveled by it along its circular path. Or, equivalently, one can let Fs be the torque applied by the lever to the end of the wire, and x be the angle by which that end turns. In either case Fs is proportional to x (although the constant k is different in each case.)
Vector formulation
In the case of a helical spring that is stretched or compressed along its axis, the applied (or restoring) force and the resulting elongation or compression have the same direction (which is the direction of said axis). Therefore, if Fs and x are defined as vectors, Hooke’s equation still holds and says that the force vector is the elongation vector multiplied by a fixed scalar.
General tensor form
Some elastic bodies will deform in one direction when subjected to a force with a different direction. One example is a horizontal wood beam with non-square rectangular cross section that is bent by a transverse load that is neither vertical nor horizontal. In such cases, the magnitude of the displacement x will be proportional to the magnitude of the force Fs, as long as the direction of the latter remains the same (and its value is not too large); so the scalar version of Hooke’s law Fs = −kx will hold. However, the force and displacement vectors will not be scalar multiples of each other, since they have different directions. Moreover, the ratio k between their magnitudes will depend on the direction of the vector Fs.
Yet, in such cases there is often a fixed linear relation between the force and deformation vectors, as long as they are small enough. Namely, there is a function κ from vectors to vectors, such that F = κ(X), and κ(αX1 + βX2) = ακ(X1) + βκ(X2) for any real numbers α, β and any displacement vectors X1, X2. Such a function is called a (second-order) tensor.
With respect to an arbitrary Cartesian coordinate system, the force and displacement vectors can be represented by 3 × 1 matrices of real numbers. Then the tensor κ connecting them can be represented by a 3 × 3 matrix κ of real coefficients, that, when multiplied by the displacement vector, gives the force vector:

That is,

for i = 1, 2, 3. Therefore, Hooke’s law F = κX can be said to hold also when X and F are vectors with variable directions, except that the stiffness of the object is a tensor κ, rather than a single real number k.
Hooke’s law for continuous media

(a) Schematic of a polymer nanospring. The coil radius, R, pitch, P, length of the spring, L, and the number of turns, N, are 2.5 μm, 2.0 μm, 13 μm, and 4, respectively. Electron micrographs of the nanospring, before loading (b-e), stretched (f), compressed (g), bent (h), and recovered (i). All scale bars are 2 μm. The spring followed a linear response against applied force, demonstrating the validity of Hooke’s law at the nanoscale.[4]
The stresses and strains of the material inside a continuous elastic material (such as a block of rubber, the wall of a boiler, or a steel bar) are connected by a linear relationship that is mathematically similar to Hooke’s spring law, and is often referred to by that name.
However, the strain state in a solid medium around some point cannot be described by a single vector. The same parcel of material, no matter how small, can be compressed, stretched, and sheared at the same time, along different directions. Likewise, the stresses in that parcel can be at once pushing, pulling, and shearing.
In order to capture this complexity, the relevant state of the medium around a point must be represented by two-second-order tensors, the strain tensor ε (in lieu of the displacement X) and the stress tensor σ (replacing the restoring force F). The analogue of Hooke’s spring law for continuous media is then

where c is a fourth-order tensor (that is, a linear map between second-order tensors) usually called the stiffness tensor or elasticity tensor. One may also write it as

where the tensor s, called the compliance tensor, represents the inverse of said linear map.
In a Cartesian coordinate system, the stress and strain tensors can be represented by 3 × 3 matrices

Being a linear mapping between the nine numbers σij and the nine numbers εkl, the stiffness tensor c is represented by a matrix of 3 × 3 × 3 × 3 = 81 real numbers cijkl. Hooke’s law then says that

where i,j = 1,2,3.
All three tensors generally vary from point to point inside the medium, and may vary with time as well. The strain tensor ε merely specifies the displacement of the medium particles in the neighborhood of the point, while the stress tensor σ specifies the forces that neighboring parcels of the medium are exerting on each other. Therefore, they are independent of the composition and physical state of the material. The stiffness tensor c, on the other hand, is a property of the material, and often depends on physical state variables such as temperature, pressure, and microstructure.
Due to the inherent symmetries of σ, ε, and c, only 21 elastic coefficients of the latter are independent.[5] This number can be further reduced by the symmetry of the material: 9 for an orthorhombic crystal, 5 for an hexagonal structure, and 3 for a cubic symmetry.[6] For isotropic media (which have the same physical properties in any direction), c can be reduced to only two independent numbers, the bulk modulus K and the shear modulus G, that quantify the material’s resistance to changes in volume and to shearing deformations, respectively.
Analogous laws
Since Hooke’s law is a simple proportionality between two quantities, its formulas and consequences are mathematically similar to those of many other physical laws, such as those describing the motion of fluids, or the polarization of a dielectric by an electric field.
In particular, the tensor equation σ = cε relating elastic stresses to strains is entirely similar to the equation τ = με̇ relating the viscous stress tensor τ and the strain rate tensor ε̇ in flows of viscous fluids; although the former pertains to static stresses (related to amount of deformation) while the latter pertains to dynamical stresses (related to the rate of deformation).
Units of measurement
In SI units, displacements are measured in meters (m), and forces in newtons (N or kg·m/s2). Therefore, the spring constant k, and each element of the tensor κ, is measured in newtons per meter (N/m), or kilograms per second squared (kg/s2).
For continuous media, each element of the stress tensor σ is a force divided by an area; it is therefore measured in units of pressure, namely pascals (Pa, or N/m2, or kg/(m·s2). The elements of the strain tensor ε are dimensionless (displacements divided by distances). Therefore, the entries of cijkl are also expressed in units of pressure.
General application to elastic materials

Objects that quickly regain their original shape after being deformed by a force, with the molecules or atoms of their material returning to the initial state of stable equilibrium, often obey Hooke’s law.
Hooke’s law only holds for some materials under certain loading conditions. Steel exhibits linear-elastic behavior in most engineering applications; Hooke’s law is valid for it throughout its elastic range (i.e., for stresses below the yield strength). For some other materials, such as aluminium, Hooke’s law is only valid for a portion of the elastic range. For these materials a proportional limit stress is defined, below which the errors associated with the linear approximation are negligible.
Rubber is generally regarded as a «non-Hookean» material because its elasticity is stress dependent and sensitive to temperature and loading rate.
Generalizations of Hooke’s law for the case of large deformations is provided by models of neo-Hookean solids and Mooney–Rivlin solids.
Derived formulae
Tensional stress of a uniform bar
A rod of any elastic material may be viewed as a linear spring. The rod has length L and cross-sectional area A. Its tensile stress σ is linearly proportional to its fractional extension or strain ε by the modulus of elasticity E:

The modulus of elasticity may often be considered constant. In turn,

(that is, the fractional change in length), and since

it follows that:

The change in length may be expressed as

Spring energy
The potential energy Uel(x) stored in a spring is given by

which comes from adding up the energy it takes to incrementally compress the spring. That is, the integral of force over displacement. Since the external force has the same general direction as the displacement, the potential energy of a spring is always non-negative.
This potential Uel can be visualized as a parabola on the Ux-plane such that Uel(x) = 1/2kx2. As the spring is stretched in the positive x-direction, the potential energy increases parabolically (the same thing happens as the spring is compressed). Since the change in potential energy changes at a constant rate:

Note that the change in the change in U is constant even when the displacement and acceleration are zero.
Relaxed force constants (generalized compliance constants)
Relaxed force constants (the inverse of generalized compliance constants) are uniquely defined for molecular systems, in contradistinction to the usual «rigid» force constants, and thus their use allows meaningful correlations to be made between force fields calculated for reactants, transition states, and products of a chemical reaction. Just as the potential energy can be written as a quadratic form in the internal coordinates, so it can also be written in terms of generalized forces. The resulting coefficients are termed compliance constants. A direct method exists for calculating the compliance constant for any internal coordinate of a molecule, without the need to do the normal mode analysis.[7] The suitability of relaxed force constants (inverse compliance constants) as covalent bond strength descriptors was demonstrated as early as 1980. Recently, the suitability as non-covalent bond strength descriptors was demonstrated too.[8]
Harmonic oscillator
A mass suspended by a spring is the classical example of a harmonic oscillator
A mass m attached to the end of a spring is a classic example of a harmonic oscillator. By pulling slightly on the mass and then releasing it, the system will be set in sinusoidal oscillating motion about the equilibrium position. To the extent that the spring obeys Hooke’s law, and that one can neglect friction and the mass of the spring, the amplitude of the oscillation will remain constant; and its frequency f will be independent of its amplitude, determined only by the mass and the stiffness of the spring:

This phenomenon made possible the construction of accurate mechanical clocks and watches that could be carried on ships and people’s pockets.
Rotation in gravity-free space
If the mass m were attached to a spring with force constant k and rotating in free space, the spring tension (Ft) would supply the required centripetal force (Fc):

Since Ft = Fc and x = r, then:

Given that ω = 2πf, this leads to the same frequency equation as above:
Linear elasticity theory for continuous media
- Note: the Einstein summation convention of summing on repeated indices is used below.
Isotropic materials
For an analogous development for viscous fluids, see Viscosity.
Isotropic materials are characterized by properties which are independent of direction in space. Physical equations involving isotropic materials must therefore be independent of the coordinate system chosen to represent them. The strain tensor is a symmetric tensor. Since the trace of any tensor is independent of any coordinate system, the most complete coordinate-free decomposition of a symmetric tensor is to represent it as the sum of a constant tensor and a traceless symmetric tensor.[9] Thus in index notation:

where δij is the Kronecker delta. In direct tensor notation:

where I is the second-order identity tensor.
The first term on the right is the constant tensor, also known as the volumetric strain tensor, and the second term is the traceless symmetric tensor, also known as the deviatoric strain tensor or shear tensor.
The most general form of Hooke’s law for isotropic materials may now be written as a linear combination of these two tensors:

where K is the bulk modulus and G is the shear modulus.
Using the relationships between the elastic moduli, these equations may also be expressed in various other ways. A common form of Hooke’s law for isotropic materials, expressed in direct tensor notation, is
[10]

where λ = K − 2/3G = c1111 − 2c1212 and μ = G = c1212 are the Lamé constants, I is the second-rank identity tensor, and I is the symmetric part of the fourth-rank identity tensor. In index notation:

The inverse relationship is[11]

Therefore, the compliance tensor in the relation ε = s : σ is

In terms of Young’s modulus and Poisson’s ratio, Hooke’s law for isotropic materials can then be expressed as

This is the form in which the strain is expressed in terms of the stress tensor in engineering. The expression in expanded form is

where E is Young’s modulus and ν is Poisson’s ratio. (See 3-D elasticity).
Derivation of Hooke’s law in three dimensions
The three-dimensional form of Hooke’s law can be derived using Poisson’s ratio and the one-dimensional form of Hooke’s law as follows.
Consider the strain and stress relation as a superposition of two effects: stretching in direction of the load (1) and shrinking (caused by the load) in perpendicular directions (2 and 3),

where ν is Poisson’s ratio and E is Young’s modulus.
We get similar equations to the loads in directions 2 and 3,

and

Summing the three cases together (εi = εi′ + εi″ + εi‴) we get

or by adding and subtracting one νσ

and further we get by solving σ1

Calculating the sum

and substituting it to the equation solved for σ1 gives

where μ and λ are the Lamé parameters.
Similar treatment of directions 2 and 3 gives the Hooke’s law in three dimensions.
In matrix form, Hooke’s law for isotropic materials can be written as

where γij = 2εij is the engineering shear strain. The inverse relation may be written as

which can be simplified thanks to the Lamé constants:

In vector notation this becomes

where I is the identity tensor.
Plane stress
Under plane stress conditions, σ31 = σ13 = σ32 = σ23 = σ33 = 0. In that case Hooke’s law takes the form

In vector notation this becomes

The inverse relation is usually written in the reduced form

Plane strain
Under plane strain conditions, ε31 = ε13 = ε32 = ε23 = ε33 = 0. In this case Hooke’s law takes the form

Anisotropic materials
The symmetry of the Cauchy stress tensor (σij = σji) and the generalized Hooke’s laws (σij = cijklεkl) implies that cijkl = cjikl. Similarly, the symmetry of the infinitesimal strain tensor implies that cijkl = cijlk. These symmetries are called the minor symmetries of the stiffness tensor c. This reduces the number of elastic constants from 81 to 36.
If in addition, since the displacement gradient and the Cauchy stress are work conjugate, the stress–strain relation can be derived from a strain energy density functional (U), then

The arbitrariness of the order of differentiation implies that cijkl = cklij. These are called the major symmetries of the stiffness tensor. This reduces the number of elastic constants from 36 to 21. The major and minor symmetries indicate that the stiffness tensor has only 21 independent components.
Matrix representation (stiffness tensor)
It is often useful to express the anisotropic form of Hooke’s law in matrix notation, also called Voigt notation. To do this we take advantage of the symmetry of the stress and strain tensors and express them as six-dimensional vectors in an orthonormal coordinate system (e1,e2,e3) as
![{displaystyle [{boldsymbol {sigma }}],=,{begin{bmatrix}sigma _{11}\sigma _{22}\sigma _{33}\sigma _{23}\sigma _{13}\sigma _{12}end{bmatrix}},equiv ,{begin{bmatrix}sigma _{1}\sigma _{2}\sigma _{3}\sigma _{4}\sigma _{5}\sigma _{6}end{bmatrix}},;qquad [{boldsymbol {varepsilon }}],=,{begin{bmatrix}varepsilon _{11}\varepsilon _{22}\varepsilon _{33}\2varepsilon _{23}\2varepsilon _{13}\2varepsilon _{12}end{bmatrix}},equiv ,{begin{bmatrix}varepsilon _{1}\varepsilon _{2}\varepsilon _{3}\varepsilon _{4}\varepsilon _{5}\varepsilon _{6}end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/99d84c34fc9efc62922b42a33f888656c62d794b)
Then the stiffness tensor (c) can be expressed as
![{displaystyle [{mathsf {c}}],=,{begin{bmatrix}c_{1111}&c_{1122}&c_{1133}&c_{1123}&c_{1131}&c_{1112}\c_{2211}&c_{2222}&c_{2233}&c_{2223}&c_{2231}&c_{2212}\c_{3311}&c_{3322}&c_{3333}&c_{3323}&c_{3331}&c_{3312}\c_{2311}&c_{2322}&c_{2333}&c_{2323}&c_{2331}&c_{2312}\c_{3111}&c_{3122}&c_{3133}&c_{3123}&c_{3131}&c_{3112}\c_{1211}&c_{1222}&c_{1233}&c_{1223}&c_{1231}&c_{1212}end{bmatrix}},equiv ,{begin{bmatrix}C_{11}&C_{12}&C_{13}&C_{14}&C_{15}&C_{16}\C_{12}&C_{22}&C_{23}&C_{24}&C_{25}&C_{26}\C_{13}&C_{23}&C_{33}&C_{34}&C_{35}&C_{36}\C_{14}&C_{24}&C_{34}&C_{44}&C_{45}&C_{46}\C_{15}&C_{25}&C_{35}&C_{45}&C_{55}&C_{56}\C_{16}&C_{26}&C_{36}&C_{46}&C_{56}&C_{66}end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/85c8bf05adff9dcaec56f4863dd039fae5986a79)
and Hooke’s law is written as
![{displaystyle [{boldsymbol {sigma }}]=[{mathsf {C}}][{boldsymbol {varepsilon }}]qquad {text{or}}qquad sigma _{i}=C_{ij}varepsilon _{j},.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2f0315b5cfc25f83e499fadf8ce4921e11340f8e)
Similarly the compliance tensor (s) can be written as
![{displaystyle [{mathsf {s}}],=,{begin{bmatrix}s_{1111}&s_{1122}&s_{1133}&2s_{1123}&2s_{1131}&2s_{1112}\s_{2211}&s_{2222}&s_{2233}&2s_{2223}&2s_{2231}&2s_{2212}\s_{3311}&s_{3322}&s_{3333}&2s_{3323}&2s_{3331}&2s_{3312}\2s_{2311}&2s_{2322}&2s_{2333}&4s_{2323}&4s_{2331}&4s_{2312}\2s_{3111}&2s_{3122}&2s_{3133}&4s_{3123}&4s_{3131}&4s_{3112}\2s_{1211}&2s_{1222}&2s_{1233}&4s_{1223}&4s_{1231}&4s_{1212}end{bmatrix}},equiv ,{begin{bmatrix}S_{11}&S_{12}&S_{13}&S_{14}&S_{15}&S_{16}\S_{12}&S_{22}&S_{23}&S_{24}&S_{25}&S_{26}\S_{13}&S_{23}&S_{33}&S_{34}&S_{35}&S_{36}\S_{14}&S_{24}&S_{34}&S_{44}&S_{45}&S_{46}\S_{15}&S_{25}&S_{35}&S_{45}&S_{55}&S_{56}\S_{16}&S_{26}&S_{36}&S_{46}&S_{56}&S_{66}end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/34760b2d8ef86f720051aebe5a45a65b312bcab6)
Change of coordinate system
If a linear elastic material is rotated from a reference configuration to another, then the material is symmetric with respect to the rotation if the components of the stiffness tensor in the rotated configuration are related to the components in the reference configuration by the relation[12]

where lab are the components of an orthogonal rotation matrix [L]. The same relation also holds for inversions.
In matrix notation, if the transformed basis (rotated or inverted) is related to the reference basis by
![{displaystyle [mathbf {e} _{i}']=[L][mathbf {e} _{i}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/213d0bb55cc1da894c855871790e09d78635c17b)
then

In addition, if the material is symmetric with respect to the transformation [L] then

Orthotropic materials
Orthotropic materials have three orthogonal planes of symmetry. If the basis vectors (e1,e2,e3) are normals to the planes of symmetry then the coordinate transformation relations imply that

The inverse of this relation is commonly written as[13][page needed]

where
- Ei is the Young’s modulus along axis i
- Gij is the shear modulus in direction j on the plane whose normal is in direction i
- νij is the Poisson’s ratio that corresponds to a contraction in direction j when an extension is applied in direction i.
Under plane stress conditions, σzz = σzx = σyz = 0, Hooke’s law for an orthotropic material takes the form

The inverse relation is

The transposed form of the above stiffness matrix is also often used.
Transversely isotropic materials
A transversely isotropic material is symmetric with respect to a rotation about an axis of symmetry. For such a material, if e3 is the axis of symmetry, Hooke’s law can be expressed as

More frequently, the x ≡ e1 axis is taken to be the axis of symmetry and the inverse Hooke’s law is written as
[14]

Universal elastic anisotropy index
To grasp the degree of anisotropy of any class, a universal elastic anisotropy index (AU)[15] was formulated. It replaces the Zener ratio, which is suited for cubic crystals.
Thermodynamic basis
Linear deformations of elastic materials can be approximated as adiabatic. Under these conditions and for quasistatic processes the first law of thermodynamics for a deformed body can be expressed as

where δU is the increase in internal energy and δW is the work done by external forces. The work can be split into two terms

where δWs is the work done by surface forces while δWb is the work done by body forces. If δu is a variation of the displacement field u in the body, then the two external work terms can be expressed as

where t is the surface traction vector, b is the body force vector, Ω represents the body and ∂Ω represents its surface. Using the relation between the Cauchy stress and the surface traction, t = n · σ (where n is the unit outward normal to ∂Ω), we have

Converting the surface integral into a volume integral via the divergence theorem gives

Using the symmetry of the Cauchy stress and the identity

we have the following

From the definition of strain and from the equations of equilibrium we have

Hence we can write

and therefore the variation in the internal energy density is given by

An elastic material is defined as one in which the total internal energy is equal to the potential energy of the internal forces (also called the elastic strain energy). Therefore, the internal energy density is a function of the strains, U0 = U0(ε) and the variation of the internal energy can be expressed as

Since the variation of strain is arbitrary, the stress–strain relation of an elastic material is given by

For a linear elastic material, the quantity ∂U0/∂ε is a linear function of ε, and can therefore be expressed as

where c is a fourth-rank tensor of material constants, also called the stiffness tensor. We can see why c must be a fourth-rank tensor by noting that, for a linear elastic material,

In index notation

The right-hand side constant requires four indices and is a fourth-rank quantity. We can also see that this quantity must be a tensor because it is a linear transformation that takes the strain tensor to the stress tensor. We can also show that the constant obeys the tensor transformation rules for fourth-rank tensors.
See also
- Acoustoelastic effect
- Elastic potential energy
- Laws of science
- List of scientific laws named after people
- Quadratic form
- Series and parallel springs
- Spring system
- Simple harmonic motion of a mass on a spring
- Sine wave
- Solid mechanics
- Spring pendulum
Notes
- ^ The anagram was given in alphabetical order, ceiiinosssttuu, representing Ut tensio, sic vis – «As the extension, so the force»: Petroski, Henry (1996). Invention by Design: How Engineers Get from Thought to Thing. Cambridge, MA: Harvard University Press. p. 11. ISBN 978-0674463684.
- ^ See http://civil.lindahall.org/design.shtml, where one can find also an anagram for catenary.
- ^ Robert Hooke, De Potentia Restitutiva, or of Spring. Explaining the Power of Springing Bodies, London, 1678.
- ^ Ushiba, Shota; Masui, Kyoko; Taguchi, Natsuo; Hamano, Tomoki; Kawata, Satoshi; Shoji, Satoru (2015). «Size dependent nanomechanics of coil spring shaped polymer nanowires». Scientific Reports. 5: 17152. Bibcode:2015NatSR…517152U. doi:10.1038/srep17152. PMC 4661696. PMID 26612544.
- ^ Belen’kii; Salaev (1988). «Deformation effects in layer crystals». Uspekhi Fizicheskikh Nauk. 155 (5): 89. doi:10.3367/UFNr.0155.198805c.0089.
- ^ Mouhat, Félix; Coudert, François-Xavier (5 December 2014). «Necessary and sufficient elastic stability conditions in various crystal systems». Physical Review B. 90 (22): 224104. arXiv:1410.0065. Bibcode:2014PhRvB..90v4104M. doi:10.1103/PhysRevB.90.224104. ISSN 1098-0121. S2CID 54058316.
- ^ Vijay Madhav, M.; Manogaran, S. (2009). «A relook at the compliance constants in redundant internal coordinates and some new insights». J. Chem. Phys. 131 (17): 174112–174116. Bibcode:2009JChPh.131q4112V. doi:10.1063/1.3259834. PMID 19895003.
- ^ Ponomareva, Alla; Yurenko, Yevgen; Zhurakivsky, Roman; Van Mourik, Tanja; Hovorun, Dmytro (2012). «Complete conformational space of the potential HIV-1 reverse transcriptase inhibitors d4U and d4C. A quantum chemical study». Phys. Chem. Chem. Phys. 14 (19): 6787–6795. Bibcode:2012PCCP…14.6787P. doi:10.1039/C2CP40290D. PMID 22461011.
- ^ Symon, Keith R. (1971). «Chapter 10». Mechanics. Reading, Massachusetts: Addison-Wesley. ISBN 9780201073928.
- ^ Simo, J. C.; Hughes, T. J. R. (1998). Computational Inelasticity. Springer. ISBN 9780387975207.
- ^ Milton, Graeme W. (2002). The Theory of Composites. Cambridge Monographs on Applied and Computational Mathematics. Cambridge University Press. ISBN 9780521781251.
- ^ Slaughter, William S. (2001). The Linearized Theory of Elasticity. Birkhäuser. ISBN 978-0817641177.
- ^ Boresi, A. P.; Schmidt, R. J.; Sidebottom, O. M. (1993). Advanced Mechanics of Materials (5th ed.). Wiley. ISBN 9780471600091.
- ^ Tan, S. C. (1994). Stress Concentrations in Laminated Composites. Lancaster, PA: Technomic Publishing Company. ISBN 9781566760775.
- ^ Ranganathan, S.I.; Ostoja-Starzewski, M. (2008). «Universal Elastic Anisotropy Index». Physical Review Letters. 101 (5): 055504–1–4. Bibcode:2008PhRvL.101e5504R. doi:10.1103/PhysRevLett.101.055504. PMID 18764407.
References
- Hooke’s law — The Feynman Lectures on Physics
- Hooke’s Law — Classical Mechanics — Physics — MIT OpenCourseWare
External links
- JavaScript Applet demonstrating Springs and Hooke’s law
- JavaScript Applet demonstrating Spring Force
| Conversion formulae | |||||||
|---|---|---|---|---|---|---|---|
| Homogeneous isotropic linear elastic materials have their elastic properties uniquely determined by any two moduli among these; thus, given any two, any other of the elastic moduli can be calculated according to these formulas, provided both for 3D materials (first part of the table) and for 2D materials (second part). | |||||||
| 3D formulae | 
|

|

|

|

|

|
Notes |

|

|

|

|

|
|||

|

|

|

|

|
|||

|

|

|

|

|
|||

|

|

|

|

|
|||

|

|

|

|

|
|||

|

|

|

|

|

|
||

|

|

|

|

|
|||

|

|

|

|

|
|||

|

|

|

|

|

There are two valid solutions. The minus sign leads to |
||

|

|

|

|

|
|||

|

|

|

|

|
Cannot be used when 
|
||

|

|

|

|

|
|||

|

|

|

|

|
|||

|

|

|

|

|
|||

|

|

|

|

|
|||
| 2D formulae | 
|

|

|

|

|

|
Notes |

|

|

|

|

|
|||

|

|

|

|

|
|||

|

|

|

|

|
|||

|

|

|

|

|
|||

|

|

|

|

|
|||

|

|

|

|

|
|||

|

|

|

|

|
|||

|

|

|

|

|
Cannot be used when 
|
||

|

|

|

|

|
|||

|

|

|

|

|


Сила упругости и закон Гука
Для начала определим основные термины, которые будут использоваться в данной статье. Известно, если воздействовать на тело извне, оно либо приобретет ускорение, либо деформируется. Деформация — это изменение размеров или формы тела под влиянием внешних сил. Если объект полностью восстанавливается после прекращения нагрузки, то такая деформация считается упругой; если же тело остается в измененном состоянии (например, согнутом, растянутом, сжатым и т. д. ), то деформация пластическая.
Примерами пластических деформаций являются:
- лепка из глины;
- погнутая алюминиевая ложка.
В свою очередь, упругими деформациями будут считаться:
- резинка (можно растянуть ее, после чего она вернется в исходное состояние);
- пружина (после сжатия снова распрямляется).
В результате упругой деформации тела (в частности, пружины) в нем возникает сила упругости, равная по модулю приложенной силе, но направленная в противоположную сторону. Сила упругости для пружины будет пропорциональна ее удлинению. Математически это можно записать таким образом:
F = — k·x;
где F — сила упругости, x — расстояние, на которое изменилась длина тела в результате растяжения, k — необходимый для нас коэффициент жесткости. Указанная выше формула также является частным случаем закона Гука для тонкого растяжимого стержня. В общей форме этот закон формулируется так: «Деформация, возникшая в упругом теле, будет пропорциональна силе, которая приложена к данному телу». Он справедлив только в тех случаях, когда речь идет о малых деформациях (растяжение или сжатие намного меньше длины исходного тела).
Формулы периода и частоты колебаний пружинного маятника
При проектировании и вычислении основных показателей также уделяется довольно много внимания частоте и периоду колебания. Косинус – периодическая функция, в которой применяется значение, неизменяемое через определенный промежуток времени. Именно этот показатель называют период колебаний пружинного маятника. Для обозначения этого показателя применяется буква Т, также часто используется понятие, характеризующее значение, обратное периоду колебания (v). В большинстве случаев при расчетах применяется формула T=1/v.
Период колебаний вычисляется по несколько усложненной формуле. Она следующая: T=2п√m/k. Для определения частоты колебания используется формула: v=1/2п√k/m.
Рассматриваемая циклическая частота колебаний пружинного маятника зависит от следующих моментов:
- Масса груза, который прикреплен к пружине. Этот показатель считается наиболее важным, так как оказывает влияние на самые различные параметры. От массы зависит сила инерции, скорость и многие другие показатели. Кроме этого, масса груза – величина, с измерением которой не возникает проблем из-за наличия специального измерительного оборудования.
- Коэффициент упругости. Для каждой пружины этот показатель существенно отличается. Коэффициент упругости указывается для определения основных параметров пружины. Зависит этот параметр от количества витков, длины изделия, расстояние между витками, их диаметра и многого другого. Определяется он самым различным образом, зачастую при применении специального оборудования.
Не стоит забывать о том, что при сильном растяжении пружины закон Гука прекращает действовать. При этом период пружинного колебания начинает зависеть от амплитуды.
Для измерения периода применяется всемирная единица времени, в большинстве случаев секунды. В большинстве случаев амплитуда колебаний вычисляется при решении самых различных задач. Для упрощения процесса проводится построение упрощенной схемы, на которой отображаются основные силы.

Определение коэффициента жесткости
Коэффициент жесткости (он также имеет названия коэффициента упругости или пропорциональности) чаще всего записывается буквой k, но иногда можно встретить обозначение D или c. Численно жесткость будет равна величине силы, которая растягивает пружину на единицу длины (в случае СИ — на 1 метр). Формула для нахождения коэффициента упругости выводится из частного случая закона Гука:
k = F/x.
Чем больше величина жесткости, тем больше будет сопротивление тела к его деформации. Также коэффициент Гука показывает, насколько устойчиво тело к действию внешней нагрузки. Зависит этот параметр от геометрических параметров (диаметра проволоки, числа витков и диаметра намотки от оси проволоки) и от материала, из которого она изготовлена.
Единица измерения жесткости в СИ — Н/м.
Физические характеристики пружин
Цилиндрические пружины характеризуются рядом параметров, сочетание которых обуславливает их жесткость — способность сопротивляться деформации:
- материал; пружины чаще всего изготавливают из стальной проволоки, причем сталь в них применялася особая, ее характеризует среднее или высокое содержание углерода, низкое содержание других примесей (низколегированный сплав) и особая термообработка (закалка), придающая материалу дополнительную упругость;
- диаметр проволоки; чем он меньше, тем эластичнее пружина, но тем меньше ее способность запасать энергию; пружины сжатия изготавливают, как правило, из более толстой проволоки, чем пружины растяжения;
- форма сечения проволоки; не всегда проволока, из которой намотана пружина, имеет круглое сечение; уплощенное сечение имеют пружины сжатия, чтобы при максимальном сокращении длины (виток «садится» на соседний виток) конструкция была более устойчивой;
- длина и диаметр пружины; длину пружины следует отличать от длины проволоки, из которой она намотана; эти два параметра согласуются через количество витков и диаметр пружины, который, в свою очередь, не следует путать с диаметром проволоки.
Готовые работы на аналогичную тему
Курсовая работа Жесткость пружины, формула 450 ₽ Реферат Жесткость пружины, формула 250 ₽ Контрольная работа Жесткость пружины, формула 230 ₽
Получить выполненную работу или консультацию специалиста по вашему учебному проекту Узнать стоимость
Существуют и другие физические характеристики, влияющие на работоспособность пружин. Например, при повышении температуры металл становится менее упругим, а при существенном ее понижении может стать хрупким. При интенсивной эксплуатации пружина со временем теряет часть упругости по причине постепенного разрушения связей между атомами кристаллической решетки.
Расчет жесткости системы
Встречаются более сложные задачи, в которых необходим расчет общей жесткости. В таких заданиях пружины соединены последовательно или параллельно.
Последовательное соединение системы пружин
При последовательном соединении общая жесткость системы уменьшается. Формула для расчета коэффициента упругости будет иметь следующий вид:
1/k = 1/k1 + 1/k2 + … + 1/ki,
где k — общая жесткость системы, k1, k2, …, ki — отдельные жесткости каждого элемента, i — общее количество всех пружин, задействованных в системе.
Параллельное соединение системы пружин
В случае когда пружины соединены параллельно, величина общего коэффициента упругости системы будет увеличиваться. Формула для расчета будет выглядеть так:
k = k1 + k2 + … + ki.
Измерение жесткости пружины опытным путем — в этом видео.
Вычисление коэффициента жесткости опытным методом
С помощью несложного опыта можно самостоятельно рассчитать, чему будет равен коэффициент Гука. Для проведения эксперимента понадобятся:
- линейка;
- пружина;
- груз с известной массой.
Последовательность действий для опыта такова:
- Необходимо закрепить пружину вертикально, подвесив ее к любой удобной опоре. Нижний край должен остаться свободным.
- При помощи линейки измеряется ее длина и записывается как величина x1.
- На свободный конец нужно подвесить груз с известной массой m.
- Длина пружины измеряется в нагруженном состоянии. Обозначается величиной x2.
- Подсчитывается абсолютное удлинение: x = x2-x1. Для того чтобы получить результат в международной системе единиц, лучше сразу перевести его из сантиметров или миллиметров в метры.
- Сила, которая вызвала деформацию, — это сила тяжести тела. Формула для ее расчета — F = mg, где m — это масса используемого в эксперименте груза (переводится в кг), а g — величина свободного ускорения, равная приблизительно 9,8.
- После проведенных расчетов остается найти только сам коэффициент жесткости, формула которого была указана выше: k = F/x.
Формула определения жесткости
Изучаемая современными школьниками формула, как найти коэффициент жесткости пружины, представляет собой соотношение силы и величины, показывающей изменение длины пружины в зависимости от величины данного воздействия (или
Читать также: Как сварить алюминий дома
равной ему по модулю силы упругости). Выглядит эта формула так: F = –kx. Из этой формулы коэффициент жесткости упругого элемента равен отношению силы упругости к изменению его длины. В международной системе единиц физических величин СИ он измеряется в ньютонах на метр (Н/м).
Другой вариант записи формулы: коэффициент Юнга
Деформация растяжения/сжатия в физике также может описываться несколько видоизмененным законом Гука. Формула включает значения относительной деформации (отношения изменения длины к ее начальному значению) и напряжения (отношения силы к площади поперечного сечения детали). Относительная деформация и напряжение по этой формуле пропорциональны, а коэффициент пропорциональности – величина, обратная модулю Юнга.
Модуль Юнга интересен тем, что определяется исключительно свойствами материала, и никак не зависит ни от формы детали, ни от ее размеров.
К примеру, модуль Юнга для ста
ли примерно равен единице с одиннадцатью нулями (единица измерения – Н/кв. м).
Смысл понятия коэффициент жесткости
Коэффициент жесткости – коэффициент пропорциональности из закона Гука. Еще он с полным правом называется коэффициентом упругости.
Фактически он показывает величину силы, которая должна быть приложена к упругому элементу, чтобы изменить его длину на единицу (в используемой системе измерений).
Значение этого параметра зависит от нескольких факторов, которыми характеризуется пружина:
- Материала, используемого при ее изготовлении.
- Формы и конструктивных особенностей.
- Геометрических размеров.
По этому показателю можно сд
елать вывод, насколько изделие устойчиво к воздействию нагрузок, то есть каким будет его сопротивление при приложении внешнего воздействия.
Особенности расчета пружин
Показывающая, как найти жесткость пружины, формула, наверное, одна из наиболее используемых современными конструкторами. Ведь применение эти упругие детали находят практически везде, то есть требуется просчитывать их поведение и выбирать те из них, которые будут идеально справляться с возложенными обязанностями.
Закон Гука весьма упрощенно показывает зависимость деформации упругой детали от прилагаемого усилия, инженерами используются более точные формулы расчета коэффициента жесткости, учитывающие все особенности происходящего процесса.
- Цилиндрическую витую пружину современная инженерия рассматривает как спираль из проволоки с круглым сечением, а ее деформация под воздействием существующих в системе сил представляется совокупностью элементарных сдвигов.
- При деформации изгиба в качестве деформации рассматривается прогиб стержня, расположенного концами на опорах.
Примеры задач на нахождение жесткости
Задача 1
На пружину длиной 10 см действует сила F = 100 Н. Длина растянутой пружины составила 14 см. Найти коэффициент жесткости.
- Рассчитываем длину абсолютного удлинения: x = 14—10 = 4 см = 0,04 м.
- По формуле находим коэффициент жесткости: k = F/x = 100 / 0,04 = 2500 Н/м.
Ответ: жесткость пружины составит 2500 Н/м.
Задача 2
Груз массой 10 кг при подвешивании на пружину растянул ее на 4 см. Рассчитать, на какую длину растянет ее другой груз массой 25 кг.
- Найдем силу тяжести, деформирующей пружину: F = mg = 10 · 9.8 = 98 Н.
- Определим коэффициент упругости: k = F/x = 98 / 0.04 = 2450 Н/м.
- Рассчитаем, с какой силой действует второй груз: F = mg = 25 · 9.8 = 245 Н.
- По закону Гука запишем формулу для абсолютного удлинения: x = F/k.
- Для второго случая подсчитаем длину растяжения: x = 245 / 2450 = 0,1 м.
Ответ: во втором случае пружина растянется на 10 см.