Сила, перемещающая тело, совершает работу. Работа – это разность энергии тела в начале процесса и в его конце. А мощность – это работа за одну секунду. Коэффициент полезного действия (КПД) – это дробное число. Максимальный КПД равен единице, однако, часто, КПД меньше единицы.
Работы силы, формула
Сила, приложенная к телу и перемещающая его, совершает работу (рис. 1).

Рис. 1. Сила перемещает тело и совершает работу
Работа силы — это скалярное произведение вектора силы на вектор перемещения.
Работу, совершаемую силой, можно посчитать, используя векторный или скалярный вид записи такой формулы:
Векторный вид записи
[ large boxed{ A = left( vec{F} , vec{S} right) }]
Для решения задач правую часть этой формулы удобно записывать в скалярном виде:
[ large boxed{ A = left| vec{F} right| cdot left| vec{S} right| cdot cos(alpha) }]
( F left( H right) ) – сила, перемещающая тело;
( S left( text{м} right) ) – перемещение тела под действием силы;
( alpha ) – угол между вектором силы и вектором перемещения тела;
Работу обозначают символом (A) и измеряют в Джоулях. Работа – это скалярная величина.
В случае, когда сила постоянная, формула позволяет рассчитать работу, совершенную силой за полное время ее действия.
Если сила изменяется со временем, то в каждый конкретный момент времени будем получать мгновенную работу. Эти, мгновенные значения для разных моментов времени будут различаться.
Рассмотрим несколько случаев, следующих из формулы:
- Когда угол между силой и перемещением острый, работа силы положительная;
- А если угол тупой — работа отрицательная, так как косинус тупого угла отрицательный;
- Если же угол прямой – работа равна нулю. Сила, перпендикулярная перемещению, работу не совершает!
Работа — разность кинетической энергии
Работу можно рассчитать еще одним способом — измеряя кинетическую энергию тела в начале и в конце процесса движения. Рассмотрим такой пример. Пусть автомобиль, движется по горизонтальной прямой и, при этом увеличивает свою скорость (рис. 2). Масса автомобиля 1000 кг. В начале его скорость равнялась 1 м/с. После разгона скорость автомобиля равна 10 метрам в секунду. Найдем работу, которую пришлось проделать, чтобы ускорить этот автомобиль.

Рис. 2. Автомобиль движется прямолинейно и увеличивает свою скорость
Для этого посчитаем энергию движения автомобиля в начале и в конце разгона.
( E_{k1} left(text{Дж} right) ) – начальная кинетическая энергия машины;
( E_{k2} left(text{Дж} right) ) – конечная кинетическая энергия машины;
( m left( text{кг}right) ) – масса автомобиля;
( displaystyle v left( frac{text{м}}{c}right) ) – скорость, с которой машина движется.
Кинетическую энергию будем вычислять, используя формулу:
[ large E_{k} = m cdot frac{v^{2}}{2} ]
[ large E_{k1} = 1000 cdot frac{1^{2}}{2} = 500 left(text{Дж} right) ]
[ large E_{k2} = 1000 cdot frac{10^{2}}{2} = 50000 left(text{Дж} right) ]
Теперь найдем разницу кинетической энергии в конце и вначале разгона.
[ large boxed{ A = Delta E_{k} }]
[ large Delta E_{k} = E_{k2} — E_{k1} ]
[ large Delta E_{k} = 50000 – 500 = 49500 left(text{Дж} right) ]
Значит, работа, которую потребовалось совершить, чтобы разогнать машину массой 1000 кг от скорости 1 м/с до скорости 10 м/с, равняется 49500 Джоулям.
Примечание: Работа – это разность энергии в конце процесса и в его начале. Можно находить разность кинетической энергии, а можно — разность энергии потенциальной.
[ large boxed{ A = Delta E }]
Работа силы тяжести — разность потенциальной энергии
Рассмотрим теперь следующий пример. Яблоко массой 0,2 кг упало на садовый стол с ветки, находящейся на высоте 3 метра от поверхности земли. Столешница располагается на высоте 1 метр от поверхности (рис. 3). Найдем работу силы тяжести в этом процессе.

Рис. 3. На рисунке указано начальное 1 положение тела (яблока) и его конечное 2 положение, отмечены высоты для подсчета работы по вертикальному перемещению тела
Посчитаем потенциальную энергию яблока до его падения и энергию яблока на столешнице.
( E_{p1} left(text{Дж} right) ) – начальная потенциальная энергия яблока;
( E_{p2} left(text{Дж} right) ) – конечная потенциальная энергия яблока;
Примечание: Работу можно рассчитать через разность потенциальной энергии тела.
Потенциальную энергию будем вычислять, используя формулу:
[ large E_{p} = m cdot g cdot h]
( m left( text{кг}right) ) – масса яблока;
Величина ( displaystyle g approx 10 left(frac{text{м}}{c^{2}} right) ) – ускорение свободного падения.
( h left( text{м}right) ) – высота, на которой находится яблоко относительно поверхности земли.
Начальная высота яблока над поверхностью земли равна 3 метрам
[ large E_{p2} = 0,2 cdot 10 cdot 3 = 6 left(text{Дж} right) ]
Потенциальная энергия яблока на столе
[ large E_{p1} = 0,2 cdot 10 cdot 1 = 2 left(text{Дж} right) ]
Теперь найдем разницу потенциальной энергии яблока в конце падения и перед его началом.
[ large Delta E_{p} = E_{p2} — E_{p1} ]
[ large Delta E_{p} = 2 – 6 = — 4 left(text{Дж} right) ]
Важно помнить: Когда тело падает на землю, его потенциальная энергия уменьшается. Сила тяжести при этом совершает положительную работу!
Чтобы работа получилась положительной, в правой части формулы перед ( Delta E_{p}) дополнительно допишем знак «минус».
[ large boxed{ A = — Delta E_{p} }]
Значит, работа, которую потребовалось совершить силе тяжести, чтобы яблоко массой 0,2 кг упало с высоты 3 м на высоту 1 метр, равняется 4 Джоулям.
Примечания:
- Если тело падает на землю, работа силы тяжести положительна;
- Когда мы поднимаем тело над землей, мы совершаем работу против силы тяжести. Наша работа при этом положительна, а работа силы тяжести будет отрицательной;
- Сила тяжести относится к консервативным силам. Для консервативных сил перед разностью потенциальной энергии мы дописываем знак «минус»;
- Работа силы тяжести не зависит от траектории, по которой двигалось тело;
- Работа для силы (displaystyle F_{text{тяж}}) зависит только от разности высот, в которых тело находилось в конечный и начальный моменты времени.
Рисунок 4 иллюстрирует факт, что для силы (displaystyle F_{text{тяж}}) работа зависит только от разности высот и не зависит от траектории, по которой тело двигалось.

Рис. 4. Разность высот между начальным и конечным положением тела во всех случаях на рисунке одинакова, поэтому, работа силы тяжести для представленных случаев будет одинаковой
Мощность
В механике мощность часто обозначают символами N или P и измеряют в Ваттах в честь шотландского изобретателя Джеймса Уатта.
Примечание: Символ (vec{N}) используется для обозначения силы реакции опоры — она измеряется в Ньютонах и является векторной величиной. Чтобы не возникло путаницы, мощность вместо N будем обозначать символом P. Символ P – первая буква в английском слове power – мощность.
Мощность – это работа, совершенная за одну секунду (энергия, затраченная за 1 сек).
Расчет работы осуществляем, используя любую из формул:
[ large A = Delta E_{k} ]
[ large A = Delta E_{p} ]
[ large A = F cdot S cdot cos(alpha) ]
Разделив эту работу на время, в течение которого она совершалась, получим мощность.
[ large boxed{ P = frac{A}{Delta t} }]
Если работа совершалась равными частями за одинаковые интервалы времени – мощность будет постоянной величиной.
Мощность переменная, когда в некоторые интервалы времени совершалось больше работы.
Еще одна формула для расчета мощности
Есть еще один способ расчета мощности, когда сила перемещает тело и при этом скорость тела не меняется:
[ large P = left( vec{F} , vec{v} right) ]
Формулу можно записать в скалярном виде:
[ large P = left| vec{F} right| cdot left| vec{v} right| cdot cos(alpha) ]
( F left( H right) ) – сила, перемещающая тело;
( displaystyle v left( frac{text{м}}{c} right) ) – скорость тела;
( alpha ) – угол между вектором силы и вектором скорости тела;
Когда векторы (vec{F}) и (vec{v}) параллельны, запись формулы упрощается:
[ large boxed{ P = F cdot v }]
Примечание: Такую формулу для расчета мощности можно получить из выражения для работы силы, разделив обе части этого выражения на время, в течение которого работа совершалась (а если точнее, найдя производную обеих частей уравнения).
КПД
КПД – коэффициент полезного действия. Обычно обозначают греческим символом (eta) «эта». Единиц измерения не имеет, выражается либо десятичной дробью, либо в процентах.
Примечания:
- Процент – это дробь, у которой в знаменателе число 100.
- КПД — это либо правильная дробь, или дробь, равная единице.
Вычисляют коэффициент (eta) для какого-либо устройства, механизма или процесса.
[ large boxed{ eta = frac{ A_{text{полезная}}}{ A_{text{вся}}} }]
(eta) – КПД;
( large A_{text{полезная}} left(text{Дж} right)) – полезная работа;
(large A_{text{вся}} left(text{Дж} right)) – вся затраченная для выполнения работы энергия;
Примечание: КПД часто меньше единицы, так как всегда есть потери энергии. Коэффициент полезного действия не может быть больше единицы, так как это противоречит закону сохранения энергии.
[ large boxed{ eta leq 1 }]
Величина (eta) является дробной величиной. Если числитель и знаменатель дроби разделить на одно и то же число, полученная дробь будет равна исходной. Используя этот факт, можно вычислять КПД, используя мощности:
[ large boxed{ eta = frac{ P_{text{полезная}}}{ P_{text{вся затраченная}}} }]
Выводы
- Сила, приложенная к телу и перемещающая его, совершает работу;
- Когда угол между силой и перемещением острый, работа силы положительная, а если угол тупой — работа отрицательная; Если же угол прямой – работа равна нулю. Сила, перпендикулярная перемещению, работу не совершает!
- Работу можно вычислить, измеряя кинетическую энергию тела в начале и в конце его движения;
- Вычислить работу можно через разность потенциальной энергии тела в начальной и в конечной высотах над землей;
- Когда тело падает на землю, его потенциальная энергия уменьшается. Сила тяжести при этом совершает положительную работу!
- Мы совершаем работу против силы тяжести, когда поднимаем тело над землей. При этом наша работа положительная, а работа силы тяжести — отрицательная;
- Сила тяжести — это консервативная сила. Поэтому, работа силы (displaystyle F_{text{тяж}}) не зависит от траектории, по которой двигалось тело, а зависит только от разности высот, в которых тело находилось в конечный и начальный моменты времени;
- Мощность – это работа, совершенная за одну секунду, или затраченная за 1 сек. энергия;
- Коэффициент полезного действия обозначают греческим символом (eta) «эта», единиц измерения не имеет, выражается либо десятичной дробью, либо в процентах;
- КПД — это либо правильная дробь, или дробь, равная единице.
- Можно вычислять КПД, подставляя в формулу работу, или мощности
В этой статье мы разберем, что такое мощность трехфазного асинхронного двигателя и как ее рассчитать.
Понятие мощности электродвигателя
Мощность – пожалуй, самый важный параметр при выборе электродвигателя. Традиционно она указывается в киловаттах (кВт), у импортных моделей – в киловаттах и лошадиных силах (л.с., HP, Horse Power). Для справки: 1 л.с. приблизительно равна 0,75 кВт.
На шильдике двигателя указана номинальная полезная (отдаваемая механическая) мощность. Это та мощность, которую двигатель может отдавать механической нагрузке с заявленными параметрами без перегрева. В формулах номинальная механическая мощность обозначается через Р2.
Электрическая (потребляемая) мощность двигателя Р1 всегда больше отдаваемой Р2, поскольку в любом устройстве преобразования энергии существуют потери. Основные потери в электродвигателе – механические, обусловленные трением. Как известно из курса физики, потери в любом устройстве определяются через КПД (ƞ), который всегда менее 100%. В данном случае справедлива формула:
Р2 = Р1 · ƞ
КПД в двигателях зависит от номинальной мощности – у маломощных моделей он может быть менее 0,75, у мощных превышает 0,95. Приведенная формула справедлива для активной потребляемой мощности. Но, поскольку электродвигатель является активно-реактивной нагрузкой, для расчета полной потребляемой мощности S (с учетом реактивной составляющей) нужно учитывать реактивные потери. Реактивная составляющая выражается через коэффициент мощности (cosϕ). С её учетом формула номинальной мощности двигателя выглядит так:
Р2 = Р1 · ƞ = S · ƞ · cosϕ
Мощность и нагрев двигателя
Номинальная мощность обычно указывается для температуры окружающей среды 40°С и ограничена предельной температурой нагрева. Поскольку самым слабым местом в двигателе с точки зрения перегрева является изоляция, мощность ограничивается классом изоляции обмотки статора. Например, для наиболее распространенного класса изоляции F допустимый нагрев составляет 155°С при температуре окружающей среды 40°С.
В документации на электродвигатели приводятся данные, из которых видно, что номинальная мощность двигателя падает при повышении температуры окружающей среды. С другой стороны, при должном охлаждении двигатели могут длительное время работать на мощности выше номинала.
Мы рассмотрели потребляемую и отдаваемую мощности, но следует сказать, что реальная рабочая потребляемая мощность P (мощность на валу двигателя в данный момент) всегда должна быть меньше номинальной:
Р < Р2 < Р1 < S
Это необходимо для предотвращения перегрева двигателя и наличия запаса по перегрузке. Кратковременные перегрузки допустимы, но они ограничены прежде всего нагревом двигателя. Защиту двигателя по перегрузке также желательно устанавливать не по номинальному току (который прямо пропорционален мощности), а исходя из реального рабочего тока.
Современные производители в основном выпускают двигатели из ряда номиналов: 1,5, 2,2, 5,5, 7,5, 11, 15, 18,5, 22 кВт и т.д.
Расчет мощности двигателя на основе измерений
На практике мощность двигателя можно рассчитать, прежде всего, исходя из рабочего тока. Ток измеряется токовыми клещами в максимальном рабочем режиме, когда рабочая мощность приближается к номинальной. При этом температура корпуса двигателя может превышать 100 °С, в зависимости от класса нагревостойкости изоляции.
Измеренный ток подставляем в формулу для расчета реальной механической мощности на валу:
Р = 1,73 · U · I · cosϕ · ƞ, где
- U – напряжение питания (380 или 220 В, в зависимости от схемы подключения – «звезда» или «треугольник»),
- I – измеренный ток,
- cosϕ и ƞ – коэффициент мощности и КПД, значения которых можно принять равными 0,8 для маломощных двигателей (менее 5,5 кВт) или 0,9 для двигателей мощностью более 15 кВт.
Если нужно найти номинальную мощность двигателя, то полученный результат округляем в бОльшую сторону до ближайшего значения из ряда номиналов.
Р2 > Р
Если необходимо рассчитать потребляемую активную мощность, используем следующую формулу:
Р1 = 1,73 · U · I · ƞ
Именно активную мощность измеряют счетчики электроэнергии. В промышленности для измерения реактивной (и полной мощности S) применяют дополнительное оборудование. При данном способе можно не использовать приведенную формулу, а поступить проще – если двигатель подключен в «звезду», измеренное значение тока умножаем на 2 и получаем приблизительную мощность в кВт.
Расчет мощности при помощи счетчика электроэнергии
Этот способ прост и не требует дополнительных инструментов и знаний. Достаточно подключить двигатель через счетчик (трехфазный узел учета) и узнать разницу показаний за строго определенное время. Например, при работе двигателя в течении часа разница показаний счетчика будет численно равна активной мощности двигателя (Р1). Но чтобы получить номинальную мощность Р2, нужно воспользоваться приведенной выше формулой.
Другие полезные материалы:
Степени защиты IP
Трехфазный двигатель в однофазной сети
Типичные неисправности электродвигателей
Содержание
- Расчёты основных параметров асинхронного электродвигателя
- Как определить мощность электродвигателя?
- Какие бывают виды регуляторов?
- Регулятор на переменном резисторе
- Электронный регулятор
- Заключение
Как выполнить расчёт потребляемой мощности асинхронного электродвигателя из сети, если по шильдикам можно узнать только номинальную мощность? Для этого необходимо:
- обратить внимание на остальные показатели – это η и cosφ (КПД и коэффициент мощности);
- учесть связь динамических характеристик вала и КПД.
По имеющимся данным, можно рассчитать затраченную мощность электроэнергии:
Pз=Р/η.
Но нужно помнить, что потребляемая энергия электрическими приборами включает в себя как активную, так и реактивную компоненту.

Расчёты основных параметров асинхронного электродвигателя
Активная мощность тратится на выполнение полезной работы и создание тепла. Обозначается буквой «P», измеряется в W и вычисляется:
P=I*U*cosφ.
Реактивная мощность создаётся колебаниями энергии электрического поля. Она обуславливает способность деталей реактивной машины сохранять и излучать электромагнитную энергию. Речь идёт о токе, который заряжает конденсатор или создает магнитное поле вокруг витков обмотки катушки. Обозначается буквой «Q», измеряется в Var и рассчитывается:
Q=I*U*sinφ.
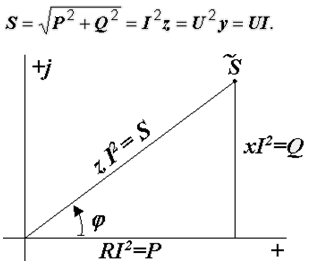
Полная мощность «S» представляется математической комбинацией по формуле теоремы Пифагора: S*S = Q*Q + P*P. Она измеряется в V*A и вычисляется:
S = P / cosφ = √(P2 + Q2)=I*U.
Реактивную мощность трехфазного асинхронного двигателя можно представить суммой двух составляющих: индуктивной и емкостной.
Лучшее представление данной величины может быть получено в виде векторной диаграммы, индуктивная составляющая – это положительная координата на оси Y, емкостная – отрицательная. Очевидно, что эти два значения несколько компенсируют друг друга, составляя координату вектора, которая будет либо положительной, либо отрицательной. Чем меньше угол между ними, тем полная мощность становится ближе к активной.
Коэффициент мощности cosφ для трёхфазного асинхронного двигателя равен 0,8–0,9. Если его необходимо увеличить, то довольно часто добавляют конденсаторы в цепи двигателя. Функция этих конденсаторов заключается в том, чтобы обеспечить намагничивающий ток, снижающий амплитуду реактивной составляющей. Чем выше cosφ, тем меньше электромашина потребляет энергии.
Как определить мощность электродвигателя?
Для того чтобы выполнить расчёт понадобятся измерительные инструменты и справочная информация. Итак, существуют варианты определения мощности электродвигателя:
- по току. Подаём питание на асинхронный электродвигатель. Поочередно делаем замеры тока в каждой обвивке амперметром. В итоге среднее значение тока умножается на напряжение и получается потребляемая мощность электродвигателя;
- по размерам. Замеряем диаметр и длину сердечника статора. Узнаем частоту оборотов вала. Далее, производим приближённый расчёт «постоянной» по формуле:
3,14•D•n/(120•f).
На основе расчёта находим в справочнике константу. Вычисляем
P = C•D²•l•n•10^(-6);
- по тяговой силе. Измеряем скорость оборотов вала с помощью тахометра, радиус вала обычной линейкой, тяговое усилие движка динамометром. Для расчёта все найденные значения перемножаем
P =M•w= F•2•3,14•n•r.
На основе этих математических выражений можно сделать вывод, что асинхронные двигатели могут иметь одинаковую мощность, но различаться по частоте вращения вала, что существенно влияет на его габариты. Рассмотрим также смысл использования регуляторов мощности.
Какие бывают виды регуляторов?
Существует два вида регуляторов, доступных на сегодняшнем рынке:
- на переменном резисторе,
- электронный (шаговый и подвижный).
Все они обладают разными способами управления скоростью вращения и, посему, эффективность (потребление электроэнергии) у каждого вида отличается. С этой точки зрения, классический регулятор – самый дешевый, но неэффективный. Давайте рассмотрим все три типа.
Регулятор на переменном резисторе

На самом деле этот реостат имеет внутри огромную катушку. Выбирая низкие параметры скорости, мы, по сути, выбираем более высокое сопротивление цепи. Это приводит к снижению потребляемого тока (так как напряжение является фиксированной величиной). Аппараты громоздкие по размеру и недорогие по цене.
Электронный регулятор
Электронные – это новейшие типы из доступных регуляторов на рынке. Они намного меньше по размерам, чем другие. Для понижения напряжения в них используются вместо резисторов конденсаторы, которые регулируя скорость вращения, управляют сигналом электропитания. В отличие от реостатов не нагреваются и, значит, экономят электроэнергию, когда мотор работает на малых скоростях.
Регуляторы способны сэкономить до 40% на «1» скорости и около 30% на «2-й» скорости по сравнению со своими резисторными аналогами. Существуют электронные разновидности регуляторов:
- подвижные с плавным регулированием.

- шаговые с пронумерованной скоростью действия (обычно от 1 до 5).

Эти устройства обеспечивают низкий уровень искажений движения мотора и, следовательно, меньше нагреваются. Вариант с лучшей технологией и экономией электричества.
Заключение
Мощность асинхронного двигателя – основная техническая характеристика этого устройства, которая влияет на сферу применения и выполняемые задачи. Для регулирования соотношения физических величин используются регуляторы. Формулы, выражающие связь физических показателей асинхронных двигателей необязательно помнить все, их можно легко выводить самим из тех, что знакомы по школьной программе физики.
Что важно знать о полезной мощности двигателя в физике
Содержание:
- Определение и формула полезной мощности
- Взаимосвязь полезной мощности и КПД
- Достижение максимального КПД
- Примеры задач с решением
Определение и формула полезной мощности
Мощность является физической величиной, применяемой в качестве ключевого параметра какого-либо устройства, которое предназначено для совершения работы.
Полезной мощностью называют такую мощность, которую можно использовать, чтобы выполнить некую поставленную задачу.
Средняя мощность (leftlangle Prightrangle) представляет собой отношение работы (Delta A) к временному интервалу (Delta t), в течение которого данная работа была выполнена:
Осторожно! Если преподаватель обнаружит плагиат в работе, не избежать крупных проблем (вплоть до отчисления). Если нет возможности написать самому, закажите тут.
(leftlangle Prightrangle =frac{Delta A}{Delta t})
Мгновенную мощность чаще всего называют просто мощностью, данная величина обозначает предел отношения (leftlangle Prightrangle =frac{Delta A}{Delta t}left(1right) при Delta tto 0:)
(P={mathop{lim }_{Delta tto 0} frac{Delta A}{Delta t} }=A'(t))
Заметим, что:
(Delta A=overline{F}cdot Delta overline{r })
Здесь (Delta overline{r }) обозначает перемещение, совершаемое неким телом под воздействием силы (overline{F}). В таком случае, можно преобразовать выражение:
(P={mathop{lim }_{Delta tto 0} left(frac{overline{F}cdot Delta overline{r }}{Delta t}right) }=overline{F}{mathop{lim }_{Delta tto 0} left(frac{Delta overline{r }}{Delta t}right)= }overline{F}cdot overline{v})
Здесь ( overline{v}) является мгновенной скоростью.
Рассмотрим такое понятие, как полезная мощность электрического источника. Представим, что некая активная цепь включает в себя источник тока с сопротивлением r. Пусть нагрузка при этом равна сопротивлению R. В результате формула мощности такого источника примет вид:
P=EI
Здесь E представляет собой ЭДС источника тока, I обозначает силу тока. При этом P является полной мощностью цепи.
Введем обозначение U в качестве напряжения на внешнем участке цепи, и перепишем формулу мощности таким образом:
(P=EI=UI+I^2r=P_p+P_0)
Здесь (P_p=UI=I^2R=frac{U^2}{R}) определяется, как полезная мощность, (P_0=I^2r) является мощностью потерь.
Исходя из представленных формул, можно вывести определение для коэффициента полезного действия:
(eta =frac{P_p}{P_p+P_0}left(9right).)
Максимальная величина полезной мощности (или мощности на нагрузке) электрического тока достижима при равенстве внешнего сопротивления цепи внутреннему сопротивлению источника тока. В этом случае, полезная мощность составит 50 % от общей мощности. При возникновении короткого замыкания (то есть (Rto 0;;Uto 0)), либо при холостом ходу (то есть (Rto infty ;;Ito 0)), полезная мощность принимает нулевое значение.
Взаимосвязь полезной мощности и КПД
В процессе выполнения нужной (полезной) работы, в том числе механической, требуется выполнять большую работу. Это связано с существованием силы сопротивления в реальных условиях и частичной подверженности энергии диссипации, то есть рассеиванию.
Коэффициент полезного действия (eta) обозначает эффективность совершения работы:
(eta =frac{P_p}{P}left(5right))
Здесь (P_p) определяется, как полезная мощность, P является мощностью, которая была затрачена.
С помощью записанной формулы можно преобразовать уравнение для расчета мощности:
(P_p=eta P)
Справедливыми являются и такие соотношения:
(eta =frac{A_1}{W}cdot 100%)
(eta =frac{N_1}{N_2}cdot 100%)
Здесь (N_1) и (N_2) будут называться полезной и затраченной мощностью соответственно.
Достижение максимального КПД
Разные двигатели характеризуются определенным КПД. Запишем некоторые примеры:
- электрический двигатель до 98 %;
- двигатель внутреннего сгорания до 40 %;
- паровая турбина до 30 %.
Существует зависимость КПД от мощности. Так коэффициент полезного действия можно рассчитать, как отношение полезной мощности к полной мощности, выдаваемой источником. В любых условиях (eta leq 1. ) С целью увеличения коэффициента полезного действия таких агрегатов, как подъемные краны, насосные установки нагнетательного типа, моторы самолетов, асинхронные двигатели, требуется снизить силу трения механизмов или сопротивления воздуха. Задача решается с помощью: использования разнообразных смазочных материалов, подшипников повышенного класса (что позволяет заменить скольжение качением); изменения геометрических параметров крыла.
Максимальные показатели энергии или мощности на выходе источника питания достигаются за счет согласования сопротивления нагрузки Rн и внутреннего сопротивления R0. При равенстве данных характеристик КПД достигает 50 %, что является приемлемым значением в случае слаботочных цепей и радиотехники.
Подобное решение не реализуемо для электрических установок, в том числе нагревателей. С целью снизить бесполезное потребление больших мощностей подбирают такой эксплуатационный режим генераторов, выпрямителей, трансформаторов, электрических двигателей, при котором коэффициент полезного действия стремится к 95 % и более.
Добиться высокого КПД для теплового двигателя можно с помощью следующих решений:
- введение в цикл расширения дополнительного рабочего тела, обладающего другими физическими свойствами;
- максимально полно перед расширением использовать два вида энергии рабочего тела;
- выполнять генерацию дополнительного рабочего тела непосредственно при расширении газообразного.
Известно, что КПД в случае ДВС можно увеличить с помощью нагнетателя турбонаддува, многократного или распределенного впрыска, увеличения влажности воздуха, перевод топлива при впрыске в парообразное состояние. Однако подобные меры не позволяют существенно повысить значение коэффициента полезного действия.
Примеры задач с решением
Задача 1
Имеется электродвигатель, КПД которого равен 42 %. Если напряжение составляет 110 В, то двигатель пропускает через себя ток силой 10 А. Требуется определить полезную мощность силового агрегата.
Решение
Запишем формулу для нахождения мощности:
(P_p=eta P left(1.1right))
Рассчитаем, чему равна полная мощность:
(P=IUleft(1.2right))
Путем подстановки получим:
(P_p=eta IU)
Определим искомую мощность:
(P_p=eta IU=0,42cdot 110cdot 10=462 left(Втright))
Ответ: (P_p=462 Вт)
Задача 2
Существует некий источник электрического тока с показателем тока короткого замыкания, равным . При включении источника тока в цепь с сопротивлением R, как показано на рисунке, сила тока составляет I. Требуется рассчитать самое большое значение, которое может принимать полезная мощность рассматриваемого источника.
Решение
Вспомним закон Ома, знакомый с уроков по физике:
(I=frac{varepsilon}{R+r}left(2.1right))
Здесь (varepsilon) является ЭДС источника тока, r представляет собой внутреннее сопротивление источника.
Если возникает короткое замыкание, то сопротивление внешней нагрузки принимает нулевое значение. В таком случае, силу тока короткого замыкания можно определить по формуле:
(I_k=frac{varepsilon}{r} left(2.2right).)
Максимальное значение полезной мощности в цепи достигается, если соблюдается условие:
(R=r left(2.3right))
Определим силу тока:
(I’=frac{varepsilon}{r+r}=frac{varepsilon}{2r}left(2.4right))
Вычислим максимальное значение полезной мощности:
(P_{p max}={I’}^2r={left(frac{varepsilon}{2r}right)}^2cdot r=frac{varepsilon^2}{4r}=frac{varepsilon^2}{4R}left(2.5right).)
Получилась система с тремя уравнениями и тремя неизвестными:
(left{ begin{array}{c}
I’=frac{varepsilon}{2r}, \
I_k=frac{varepsilon}{r}, \
P_{p max}={left(I’right)}^2r end{array}.right.)
Вычислим I’:
(frac{I’}{I_k}=frac{varepsilon}{2r}cdot frac{r}{varepsilon}=frac{1}{2}to I’=frac{1}{2}I_k)
Далее составим выражение для внутреннего сопротивления источника тока:
(varepsilon=Ileft(R+rright);; I_kr=varepsilon to Ileft(R+rright)=I_krto rleft(I_k+Iright)=IRto r=frac{IR}{I_k-I})
Методом подстановки найдем искомую мощность:
(P_{p max}={left(frac{1}{2}I_kright)}^2frac{IR}{I_k-I})
Ответ: (P_{p max}={left(frac{1}{2}I_kright)}^2frac{IR}{I_k-I}.)
Задача 3
Электропоезд благодаря моторам движется со скоростью 54 км/ч. При этом его полезная мощность составляет 720 кВт. Нужно найти силу тяги моторов.
Решение
Запишем формулу для определения мощности двигателей электропоезда:
(N=Fcdot v)
Тогда сила тяги моторов составит:
(F=frac{N}{v})
Выполним перевод единиц измерения в СИ:
(v=54 км/ч =15 м/с)
В результате:
(N=720 kBt=720000 Bt)
Выполним вычисления:
(F=frac{720000}{15}=48000 H=48 kH)
Ответ: сила тяги моторов равна 48 КН.
Задача 4
Масса машины составляет 2200 кг. Трогаясь с места, автомобиль осуществляет подъем в гору с углом наклона 0,018. Преодолев путь в 100 м, машина приобретает скорость 32,4 км/ч. Коэффициент трения равен 0,04. Требуется вычислить среднюю мощность, которую развивает двигатель автомобиля в процессе движения.
Решение
Формула средней мощности двигателя во время движения машины:
(leftlangle Nrightrangle =Fcdot leftlangle vrightrangle)
Автомобиль движется со средней скоростью:
(leftlangle vrightrangle =frac{v}{2})
Отметим на рисунке все силы, под действием которых находится автомобиль:
Перечислим все силы:
- сила тяжести (moverline{g};)
- сила реакции опоры (overline{N};)
- сила трения ({overline{F}}_{fr};)
- сила тяги двигателей (overline{F}.)
Уравнение второго закона Ньютона:
(moverline{g}+overline{N}+{overline{F}}_{fr}+overline{F}=moverline{a})
Если спроецировать записанное соотношение на координатные оси, получим:
({ begin{cases} F-F_{fr}-mgsinalpha =ma \ N-mgcosalpha =0 end{cases}})
Заметим, что:
(N=mgcosalpha)
(F_{fr}=mu N=mu mgcosalpha)
Преобразуем уравнение:
(F-mu mgcosalpha -mgsinalpha =ma)
Таким образом:
(F=mleft(mu gcosalpha +gsinalpha +aright))
Рассчитаем ускорение машины:
(a=frac{v^2}{2s})
Заметим, что:
(cosalpha =sqrt{1-{sin}^2alpha })
Выполним подстановку:
(F=mleft(mu gsqrt{1-{sin}^2alpha }+gsinalpha +frac{v^2}{2s}right))
Двигатель в процессе движения развивает среднюю мощность:
(leftlangle Nrightrangle =mleft(mu gsqrt{1-{sin}^2alpha }+gsinalpha +frac{v^2}{2s}right)cdot frac{v}{2})
Известно, что ускорение свободного падения равно (9,8 м/с ^{2}). Переведем единицы измерения в СИ:
(v=32,4 км/ч =9 м/с.)
Выполним вычисления:
(leftlangle Nrightrangle =2200cdot left(0,04cdot 9,8cdot sqrt{1-{0,018}^2}+9,8cdot 0,018+frac{9^2}{2cdot 100}right)cdot frac{9}{2}=9512,9 Bt=9,5 kBt)
Ответ: мотор машины имеет среднюю мощность 9,5 кВт.
Как рассчитать мощность электродвигателя
Как рассчитать мощность электродвигателя

- Расчёты основных параметров асинхронного электродвигателя
- Как определить мощность электродвигателя?
- Какие бывают виды регуляторов?
- Регулятор на переменном резисторе
- Электронный регулятор
- Заключение
Как выполнить расчёт потребляемой мощности асинхронного электродвигателя из сети, если по шильдикам можно узнать только номинальную мощность? Для этого необходимо:
- обратить внимание на остальные показатели – это η и cosφ (КПД и коэффициент мощности);
- учесть связь динамических характеристик вала и КПД.
По имеющимся данным, можно рассчитать затраченную мощность электроэнергии:
Pз=Р/η.
Но нужно помнить, что потребляемая энергия электрическими приборами включает в себя как активную, так и реактивную компоненту.
Типы электродвигателей
Для начала желательно разобраться, какими же бывают модификации и модели движков. Именно от типа двигателя зависит величина мощности, которой он обладает, и другие показатели, характеризующие устройство.

Согласно общей классификации, электродвигатели бывают:
- постоянного тока;
- переменного тока.








Первый вид встречается редко, так как для его использования необходим источник постоянного электрического тока. Второй вариант применяется намного чаще, двигатель переменного тока востребован для обеспечения функционирования большей части современного оборудования.

Электродвижки переменного тока разделяются на синхронные и асинхронные. От модели двигателя во многом зависят основные технические характеристики устройства, например, показатель мощности у различных модификаций может варьировать от минимальных значений до 10 000 кВатт.

Выбор той или иной модели электродвигателя должен осуществляться исходя из оптимальных значений показателей для каждого конкретного случая.

Бирка (шильдик) электродвигателя
Осмотрев любой, за редким исключением, электродвигатель можно обнаружить табличку, привинченную на болты, саморезы или же заклепки. Что же написано на данном куске металла? Возьмем шильдик, заменив на нем заводской номер на название сайта.

Кстати, редко бывает, что табличка на электрооборудование находится в таком, почти идеальном состоянии. Часто данные выцветают или замазаны краской, ведь задача стоит для обслуживающего персонала покрасить двигатель, а не покрасить двигатель, оставив табличку нетронутой. Но, нам повезло. Пойдем по-порядку.
Первая строчка — число фаз и тип тока (3
), заводской номер, частота сети, форма исполнения и монтажа, класс изоляции
Вторая строчка — тип электродвигателя, косинус фи, возможные схемы соединения, номинальная частота вращения
Третья строчка — возможные номинальные напряжения, номинальная мощность, IP — степень защиты электродвигателя, масса, режим работы электродвигателя (S1).
Четвертая строчка — номинальные токи в зависимости от схемы включения обмоток, далее какому госту соответствует эд.
Рассмотрим отдельные параметры более подробно.
Мощность электродвигателя: полная, активная и на валу
Формула для расчета мощности трехфазного асинхронного двигателя:

S1 — полная мощность, потребляемая двигателем из сети
P1 — активная мощность, потребляемая электродвигателем из сети (указана на шильдике)
P — активная мощность на валу ЭД.
cosf — косинус фи, коэффициент мощности — угол сдвига фаз между активной (P) и полной мощностью (S).
В формулах выше, значение мощности получится в Вт, значение полной мощности в ВА. Чтобы перевести в киловатты необходимо получившееся значение разделить на тысячу. Значение тока и напряжения соответственно в формуле выше в амперах и вольтах.
I1 и U1 — линейные значения тока и напряжения, их еще называют междуфазными. Не стоит путать с фазными. Линейные — это АВ, ВС, СА (380); фазные — АО, ВО, СО (220). Если выразить формулы мощностей через фазные значения тока и напряжения, то вместо корня из трех вначале будет коэффициент 3. Этот коэффициент определяется наглядно через векторную диаграмму трехфазного напряжения.
Для двигателей постоянного тока формула будет просто произведение напряжения на зажимах двигателя умножить на ток, потребляемые двигателем из сети.
Потребляемая мощность p1 больше мощности на валу ЭД из-за потерь, которые возникают при преобразовании электрической энергии в механическую.
Звезда/Треугольник и 220/380, 380/660
Смотреть все значения по порядку как они идут через дробь. То есть написано на шильде Y/D ( треугольник/звезда), значит и токи, напряжения соответственно будут сначала для Y, а после дроби для звезды. Единственно, нюанс, что при 220/380 — треугольник будет 220, А при 380/660 — треугольник будет 380. То есть говорить, что 380 — это всегда звезда — неверно.
Всегда изучайте табличку на движке перед подключением.
Достоинства при подключении звездой и треугольником абстрактны, так как каждая схема имеет свои области применения:
- Y — меньше рабочий и пусковой ток, больше напряжение, меньше пусковой момент, меньше греется
- D — больше пусковой момент, пусковой ток, но и больше греется.
Бывают двухскоростные двигатели, где сначала запускаются на звезде, А потом переходят на треугольник. В таком случае механизм легче запускается, А потом работает с большей мощностью.
При подключении трехфазного двигателя на 220В, где есть лишь фаза и ноль, можно прибегнуть к схеме с конденсаторами.
Форма исполнения и способ монтажа
IM 1081 — форма исполнения и способ монтажа согласно ГОСТ 2479 и МЭК60034-5. В нашем примере это обозначает “на лапах с двумя подшипниковыми щитами, с одним циллиндрическим концом вала”.
Это название состоит из латинских букв IM и четырех чисел.
Первая цифра от 1 до 9 — конструктивный способ исполнения
Вторая и третья (00. 99) — способ монтажа
Четвертая (0..9) — условное обозначение конца вала.
Коэффициент полезного действия электродвигателя
КПД показывает эффективность преобразования электродвигателем электрической энергии, которую он берет из сети, в механическую энергию вращения механизма.
Если бы не было потерь при передаче энергии, то КПД равнялся бы 100%. Однако, такого не существует. Однако, существуют виды потерь, которые уменьшают величину коэффициента:
- потери от нагрева проводников с током при увеличении нагрузки — электрические потери
- потери на вихревые токи, гистерезис в шихтованных статорах — магнитные потери
- потери на трение подшипников, вентиляцию — механические потери
- плюс различные дополнительные менее важные виды потерь.
Часто, но не всегда, чем выше скорость вращения электродвигателя, тем больше его КПД. Это связано с зависимостью КПД и скольжения ЭД. Существуют классы согласно величины КПД по ГОСТ IEC/TS 60034-31—2015: IE1, IE2, IE3, IE4.
Классы изоляции двигателей по нагревостойкости
Здесь нам на помощь придет ГОСТ 8865-93. Класс изоляции электрических машин характеризует максимальную температуру при номинальных параметрах. То есть в нашем примере при номинальных данных с таблички, температура изоляции не должна превышать 155 градусов.
Приведу данные допустимых температур электродвигателей для разных классов изоляции. Следует учитывать, что материалы могут иметь различные классы.
- Y — 90
- A — 105
- E — 120
- B — 130
- F — 155
- H — 180
Далее идут цифровые классы: 200, 220, 250 — а после них плюс 25 градусов с обозначением класса согласно допустимого значения температуры.
Данные температуры определены опытным путем при работе на номинальных параметрах на протяжении срока эксплуатации до величин, при которых увеличивается тангенс дельта и уменьшается напряжение пробоя.
Сохраните в закладки или поделитесь с друзьями
Для тех, кому надо знать не только мощность, но и объем потребляемого тока, также есть несколько способов получения таких данных. Для каждого из них важным критерием в процессе определения является количество фаз.
Если у вас однофазная сеть, разделите показатель мощности на значение напряжения.
Если двигатель 3-фазный, схема подсчета еще проще: удвойте значение мощности — это и будет показатель в Амперах.
Как вы убедились, узнать мощность двигателя и потребляемый ток, даже если эти данные утеряны, достаточно просто. Выбирайте самый простой для вас способ решения проблемы и пусть ваша техника всегда работает исправно и имеет высокий КПД!
РАСЧЕТ МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ДЛЯ НАСОСА
Формула для определения мощности (кВт) эл. двигателя насоса
где κ — коэффициент запаса (1.1—1.4);
γ — удельный вес перекачиваемой жидкости, Н/м³, для холодной воды равен 9810;
Q — производительность насоса, м³/с;
Н — напор насоса, м;
ηp — кпд передачи (при непосредственном соединении насоса с двигателем ηp = 1);
ηn — кпд насоса принимают равным: для поршневых насосов — 0.7—0.98; для центробежных насосов с давлением свыше 39 000 Па — 0.6—0.75; с давлением ниже 39 000 Па — 0.3— 0.6 (лучше всего кпд определять по данным каталогов).
При выборе эл. двигателя к центробежному насосу необходимо обращать внимание на частоту вращения двигателя, так как у центробежного насоса мощность, напор, производительность и частота вращения связаны следующими соотношениями:
где M — момент двигателя.
Пример расчета мощности двигателя насоса
1. Определить мощность двигателя насоса при следующих данных Q = 50 м³/ч; H = 30 м; ηn = 0.5; nd = 1460 об/мин.
2. Определить мощность двигателя, напор насоса и производительность, если двигатель вращается с частотой 965 об/мин.
1. Мощность двигателя насоса при nd = 1460 об/мин
кВт,
где 3600 — коэффициент перевода производительности из м³/ч в м³/с.
2. При частоте вращения насоса nd = 965 об/мин мощность двигателя, напор насоса и производительность:
Расчет пускового тока электродвигателя
В момент запуска электродвигателя его вал остается в неподвижном состоянии. Для того чтобы он начал раскручиваться, необходимо приложить усилие, значительно больше номинального. В связи с этим пусковой ток также превышает номинал. В процессе раскручивания вала происходит постепенное плавное уменьшение тока.
Влияние пусковых токов негативно сказывается на работе оборудования, в основном из-за резких провалов напряжения. Для того чтобы уменьшить их отрицательное воздействие, применяются различные способы. В процессе разгона, схемы электродвигателя переключаются со звезды на треугольник, используются частотные преобразователи и электронные устройства плавного пуска.
Вначале рассчитывается значение номинального тока двигателя, в соответствии с его типом и номинальной мощностью. Для устройств постоянного тока формула будет выглядеть следующим образом:
У электродвигателей переменного тока номинальный ток определяется по другой формуле:
Все параметры имеют соответствующие обозначения:
- РН – значение номинальной мощности двигателя;
- UH – значение номинального напряжения двигателя;
- ηH–КПД электродвигателя;
- cosfH – соответствует коэффициенту мощности двигателя.
После расчетов номинального тока можно вычислить значение пускового тока по формуле: , в которой:
, в которой:
- IH – номинальное значение тока, определенное ранее;
- Кп–кратность постоянного тока к номиналу.
Значение пускового тока рассчитывается для каждого двигателя, имеющегося в электрической цепи. В соответствии с его величиной выбирается автоматический выключатель, обеспечивающий защиту всей цепи.
Измерить мощность электродвигателя
Мощность электродвигателя составлена активной, реактивной составляющими. Предприятиям установлен штрафной тариф. Потому важно понимать измеряемые величины. Инструкция токовых клещей пишет: оценивают среднеквадратический ток. Чистая математика. Сие означает: прибор делает выборку определенного интервала, берет корень суммы квадратов отдельных измерений, деленной на общее количество. Уподобим усреднению за некоторый период времени.
Активный ток, полный, реактивный (вряд ли). Вопрос полезно выяснить: токовые клещи, показанные фото, с завидной регулярностью дают мощность приборов на 11% ниже номинала. Проверяли электрические обогреватели, утюги, фен. Мощность занижена единой величиной. Литература пишет: среднеквадратическое значение (RMS) показывает полную величину тока. Физически течет по проводу. Расчет ведется для синусоидальной формы, будут отклонения при невыполнении требования.
Токовые клещи попросту врут. Показывали бы активную часть, для двигателя значения были бы существенно ниже, нежели обогревателя. Нагрузка чисто активная, обмотки дают сильную мнимую составляющую. Требуется тарировать токовые клещи перед применением. Сделать проще всего, используя чисто активные обогреватели (масляные). Возможность токовых клещей измерять активную мощность отдельно обычно указывается инструкцией. Профессионалы говорят: подобные изделия – плод воображения дилетантов.
Двигатели дают большую нагрузку в реактивном спектре. Люди мирится, либо ставят конденсаторные блоки, компенсирующие нестыковку, выравнивая фазу. О подобных бытовых изделиях можете прочитать на сайтах, продающих приборы наподобие Эконор. Смысл коробочки подобно блоку конденсаторов компенсировать реактивную мощность. Обратите внимание: для профессиональных станций указывается лимит, выраженный ВАР, для Эконор параметр замалчивается. Один радиолюбитель посчитал цифру. Оказалось, компенсируется 150 ВАР.
Наверное, хватит маломощным приборам, двигателям будет слоновья дробина. Асинхронные машины дают 40% реактивной мощности, тратится энергия. Пользы грош. Обратите внимание: при изолированной нейтрали проблем добавляется. Ток втекает одной фазой, выходит – другой. Эффект может вычитаться. Токовые клещи нельзя считать лучшим вариантом.
Лучше, если нейтраль заземленная. Суммарный ток вытекает нулевым проводом, где выполняем измерения. Нейтраль изолирована – получается, эффект одного провода будем измерять дважды: вход, выход. Попробуйте три значения сложить, потом поделить на два. Грубая методика окажется приблизительно верной.

Насадка токовых клещей
Показатели механической эффективности
Эффективность двигателя рассчитывается как механическая выходная мощность, деленная на электрическую входную мощность:
E = Pout / Pin
Pout = Pin * E
после подстановки мы получаем:
Т * ω = I * V * E
Т * rpm * 2 * П / 60 = I * V * E
и формула для расчета момента силы будет равна:
Т = (I * V * E * 60) / (об / мин * 2 * П)
 Чтобы определить мощность двигателя необходимо подключить его к нагрузке, для образования момента силы. Измерьте ток, напряжение и об / мин. Теперь вы можете рассчитать момент силы для этой нагрузки с этой скоростью, предполагая, что вы знаете эффективность двигателя.
Чтобы определить мощность двигателя необходимо подключить его к нагрузке, для образования момента силы. Измерьте ток, напряжение и об / мин. Теперь вы можете рассчитать момент силы для этой нагрузки с этой скоростью, предполагая, что вы знаете эффективность двигателя.
Оценочная 15-процентная эффективность представляет собой максимальную эффективность двигателя, которая происходит только с определенной скоростью. Эффективность может быть какая угодно между нулем и максимумом; в нашем примере ниже 1000 об / мин может быть неоптимальная скорость, поэтому для расчетов вы можете использовать 10% КПД (E = 0,1).
Пример: скорость 1000 об / мин, напряжение 6 В, а ток 220 мА (0,22 А):
Т = (0,22 * 6 * 0,1 * 60) / (1000 * 2 * 3,14) = 0,00126 Н • м
Как результат, обычно он выражается в миллиньютонах умноженные на метры (мН • м). 1000 мН • м в 1 Н • м, поэтому рассчитанный крутящий момент составляет 1,26 мН • м. Его можно было бы преобразовать далее в (г-см), умножив результат на 10,2, и. е. Крутящий момент составляет 12,86 г-см.
В нашем примере входная мощность двигателя составляет 0,22 A x 6 V = 1,32 Вт, механическая мощность выхода составляет 1000 об / мин x 2×3,14×0,00126 Н • м / 60 = 0,132 Вт.
 Момент силы двигателя изменяется со скоростью. При отсутствии нагрузки максимальная скорость и нулевой крутящий момент. Нагрузка добавляет механическое сопротивление. Мотор начинает потреблять больше тока для преодоления этого сопротивления, и скорость уменьшается. Когда это происходит, момент силы максимален.
Момент силы двигателя изменяется со скоростью. При отсутствии нагрузки максимальная скорость и нулевой крутящий момент. Нагрузка добавляет механическое сопротивление. Мотор начинает потреблять больше тока для преодоления этого сопротивления, и скорость уменьшается. Когда это происходит, момент силы максимален.
Насколько точен расчет крутящего момента, определяется следующим образом. В то время как напряжение, ток и скорость могут быть точно измерены, эффективность двигателя может быть неправильной. Это зависит от точности вашей сборки, положения датчика, трения, выравнивания моторов и осей генератора и т. д.
Скорость, крутящий момент, мощность и эффективность не являются постоянными значениями. Обычно производитель предоставляет следующие данные в специальных таблицах.
Линейные двигатели
Линейный двигатель по существу является асинхронным двигателем, ротор которого «разворачивается», так что вместо создания вращательной силы вращающимся электромагнитным полем, он создает линейную силу вдоль своей длины путем установки электромагнитного поля смещения.
Акустический шум
Акустический шум и вибрации электродвигателей обычно возникает из трех источников:
- механические источники (например, из-за подшипников);
- аэродинамические источники (например, благодаря вентиляторам, установленным на валу);
- магнитные источники (например, из-за магнитных сил, таких как силы Максвелла и магнитострикции, действующие на структуры статора и ротора).
Последний источник, который может отвечать за шум электродвигателей, называется электрически-возбужденным акустическим шумом.