Математическая модель транспортной задачи
Математическая
модель транспортной задачи в общем виде
имеет вид:
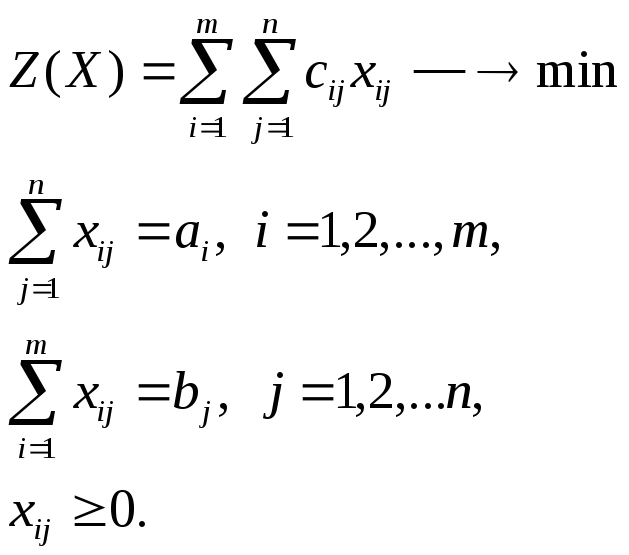
Целевая функция
задачи Z(X)
выражает
требование обеспечить минимум суммарных
затрат на перевозку всех грузов. Вторая
группа из уравнений ограничений
записанных в общем виде, выражает
требование, что запасы всех m,
поставщиков
вывозятся полностью, а также полностью
должны удовлетворятся запросы всех n
потребителей. Последнее неравенство
является условием неотрицательности
всех переменных.
В рассмотренной
математической модели транспортной
задачи предполагается, что суммарные
запасы поставщиков равны суммарным
запросам потребителей, т.е.
![]()
такая задача
называется сбалансированной,
а её модель закрытой.
Если же
это равенство не выполняется, то задача
называется несбалансированной
(с неправильным балансом), а её модель
– открытой.
Для того чтобы
транспортная задача линейного
программирования имела решение,
необходимо, чтобы суммарные запасы
поставщиков равнялись суммарным запросам
потребителей, т.е. задача должна быть
сбалансированной.
Определения:
1.Если задача
открыта, то необходимо добавить фиктивного
поставщика или потребителя с недостающим
объемом поставки и нулевой стоимостью
перевозки. Распределение поставки
фиктивному потребителю (поставщику),
идет в последнюю очередь.
2.Клетка в плане
перевозок называется базисной (закрытой),
если в нее ставится перевозка.
3.Количество
базисных клеток определяется соотношением
r=m+n-1.
опорное решение не может иметь базисных
клеток больше, чем r.
4.План называется
вырожденным, если количество базисных
клеток меньше r,
т.е. базисных клеток не хватает при
выполненном условии, что объем поставок
поставщиков распределен полностью и
спрос потребителей также удовлетворен.
В этом случае необходимо добавить
нулевую перевозку.
5.Если в задаче
указана не только стоимость перевозки,
но и стоимость производства товара,
тогда необходимо сложить эти стоимости
с учетом перевозки товара от i-го
поставщика
j-му
потребителю.
Кроме того, математическая модель
составляется с учетом этой суммарной
стоимости.
Алгоритм решения
транспортных задач.
1.Составить опорный
план, т.е. начальное приближение.
2.Составить
математическую модель исходной прямой
и математическую модель двойственной
задач.
3.Пользуясь методом
наименьшего (наибольшего) элемента и
методом потенциалов найти улучшение
исходного опорного плана до тех пор,
пока он не будет удовлетворять условию
оптимальности.
-
Математическая модель двойственной
транспортной задачи
Математическая
модель двойственной задачи:
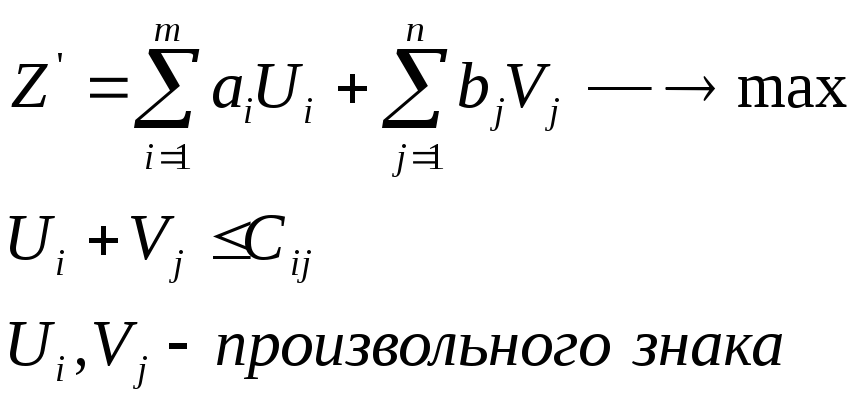
если целевая
функция Z’
стремится к минимуму то в системе
ограничении меняется знак:
![]()
экономический смысл перемененных
двойственной задачи:
Ui
– условная
оценка i-го
поставщика
(условная плата поставщика перевозчику);
Vj
– условная оценка j-го
потребителя
(условная плата потребителя перевозчику).
Ui,
Vj
– называются потенциалами.
-
Алгоритм решения транспортных задач.
Метод наименьшего (наибольшего) элемента
1.Сбалансировать
задачу (убедиться, что задача
сбалансирована).
2.Определить
свободную клетку с наименьшей стоимостью
перевозки. Если таких клеток несколько,
то выбрать клетку с наибольшей
потенциальной грузоперевозкой. Если и
таких клеток несколько, то выбирается
любая из этих клеток.
3.В выбранную клетку
поставить максимально возможную
грузоперевозку для потребителя от
поставщика.
4.Проверить, остался
ли нераспределенным груз у этого
поставщика.
5.Если груз
распределен не полностью, то применяем
п.2 относительно строки этого поставщика.
Продолжать до тех пор, пока груз этого
поставщика будет полностью распределен.
Если груз поставщика
распределен полностью, проверить,
полностью ли удовлетворен объем
потребителя.
Если потребитель
полностью удовлетворен, то применить
пункт 2 относительно оставшихся
поставщиков и потребностей в таблице.
Если объем
потребителя полностью не удовлетворен,
тогда применяется пункт 2 относительно
соответствующего столбца.
6.Проверить план
на вырожденность.
Количество базисных клеток должно быть
равным r=m+n-1.
Если план вырожденный,
то поставить
фиктивное значение груза так, чтобы
иметь возможность найти потенциалы
всех базисных клеток (ставить нулевую
перевозку).
7.Проверить на
оптимальность и по возможности дальше
улучшить, перейдя к методу потенциалов.
-
Алгоритм решения транспортных задач.
Метод потенциалов
1.Для всех базисных
клеток создать систему уравнений вида
![]() .
.
Выбрать переменную
Ui
или
Vj,
которой соответствует наибольшее
количество занятых клеток, приравнять
её к нулю, решить систему уравнений
относительно Ui
и
Vj
и найти эти значения.
2.Для всех свободных
клеток составить и проверить выполнение
неравенств:
![]()
Условия оптимальности:
если для всех свободных клеток выполняется
это неравенство, то тогда найден
оптимальный план.
Если хотя бы для
одной клетки не выполняется это
неравенство, то необходимо улучшить
опорный план с помощью коэффициента
перераспределения W.
3.Находим клетку,
где сильнее всего не выполняется
неравенство. Если таких клеток несколько,
то выбирается любая. В эту клетку ставим
W
со знаком
«+».
4.Построить контур
перераспределения груза, начиная с
выбранной клетки, исходя из следующих
правил:
-В строке и столбце
должно быть четное число W;
-Контур меняет
направление только в базисных клетках;
-Коэффициент W
меняет свой знак с «+» на «-» поочередно
в углах контура.
5.После построения
контура отметить, в каких базисных
клетках коэффициент W
стоит с отрицательным знаком. Из этих
клеток найти клетку с наименьшим
значением перевозки, коэффициент W
будет
равен перевозке в выбранной клетке.
6.Найти новый план,
перераспределив найденное значение W
по контуру
с учетом знаков «+» и «-», прибавляя или
уменьшая стоящую в клетке перевозку.
7.Проверить новый
план в соответствии в п.2, если неравенства
для свободных клеток выполняются, значит
найденный план оптимален.
Если в математической
модели целевая функция прямой задачи
на максимум (Zmax),
то задача решается методом максимального
элемента. т.е. грузоперевозка (Xij)
распределяется при составлении опорного
плана с учетом наибольшего значения
Cij
аналогично алгоритма метода наименьшего
элемента. В методе потенциалов проверяется
выполнение неравенства
![]() .
.
-
Постановка задачи целочисленного
программирования. Понятия о методе
ветвей и границ
В ряде экономических
задач, относящихся к задачам линейного
программирования, элементы решения
должны выражаться в целых числах. В этих
задачах переменные означают количество
единиц неделимой продукции.
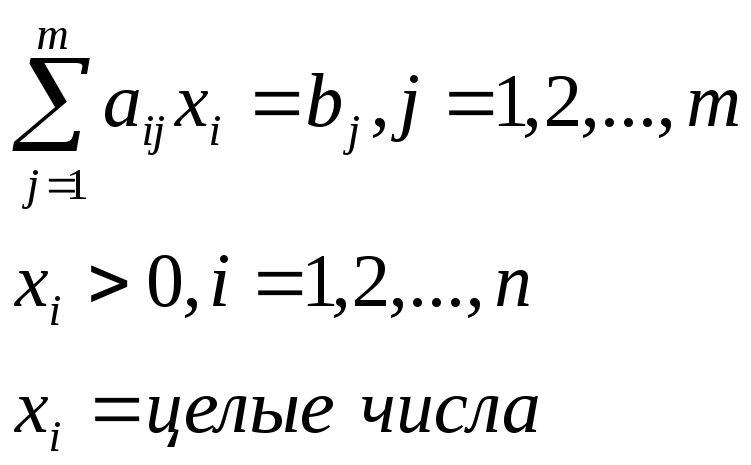
Задача целочисленного
программирования формулируется следующим
образом:
Найти такое решение
план Х=(х1,
х2,…,
хn),
при котором линейная функция
![]()
принимает максимальное или минимальное
значение при ограничениях
задача решается
методами линейного программирования.
В случае если переменные оптимального
решения оказываются нецелочисленными,
то, применяя методы отсечения или метод
перебора целочисленных решений.
Понятия о методе
ветвей и границ.
Метод ветвей и
границ заключается в упорядоченном
переборе вариантов и рассмотрении лишь
тех из них, которые оказываются по
определенным признакам перспективными,
и отбрасывании бесперспективных
вариантов.
Метод ветвей и
границ состоит в следующем: множество
допустимых решений (планов) некоторым
способом разбивается на подмножества,
каждое из которых этим же способом снова
разбивается на подмножества. Процесс
продолжается до тех пор. Пока не получено
оптимальное целочисленное решение
исходной задачи.
Название метода
ветвей и границ исходит из того, что в
процессе решения задача последовательно
«ветвится», заменяясь более простыми.
Процесс решения можно продолжать в виде
дерева, цифры в узлах (вершинах) которого
обозначают план решения задачи (искомые
переменные).
-
Графический метод решения задач
целочисленного программирования.Алгоритм
При наличии в
задаче линейного программирования двух
переменных, а в системе ограничения –
неравенств, она может быть решена
графическим методом без требований
целочисленных переменных.
Если оптимальное
решение этой задачи является целочисленным,
то оно и является оптимальным для
исходной задачи.
Если же полученное
оптимальное решение не целочисленное,
то строится дополнительное линейное
ограничение. Оно обладает следующими
свойствами:
1.Оно должно быть
линейным;
2.Должно отсекать
найденный оптимальный не целочисленный
план;
3.Не должно отсекать
ни одного целочисленного плана.
Алгоритм
графического решения задачи
целочисленного
программирования.
1.Построить систему
координат x10х2
и выбрать масштаб.
2.Найти область
допустимых решений (ОДР) системы
ограничений задачи.
3.Построить целевую
функцию, являющуюся линией уровня и на
ней указать направление нормали.
4.Переместить линию
целевой функции по направлению нормали
через ОДР, чтобы она из секущей стала
касательной к ОДР и проходила через
наиболее удаленную от начала координат
точку. Эта точка будет являться точкой
экстремума, т.е. решением задачи.
Если окажется, что
линия целевой функции параллельна одной
из сторон ОДР, то в этом случае экстремум
достигается во всех точках соответствующей
стороны, а задача линейного программирования
будет иметь бесчисленное множество
решений.
5.Найти координаты,
точки экстремума и значение целевой
функции в ней. Если полученные значения
не целочисленные, то перейти к следующему
шагу.
6.Выделить у этих
координат область с целочисленными
значениями.
7.Определить новые
координаты и построить граф.
8.Найти точки с
целыми значениями искомых переменных,
подставить в уравнение целевой функции
и найти её значение. Максимальное из
полученных значений целевой функции и
будет решением задачи.
Условие задачи.
Решить методом
ветвей и границ задачу, имеющую следующую
математическую модель.
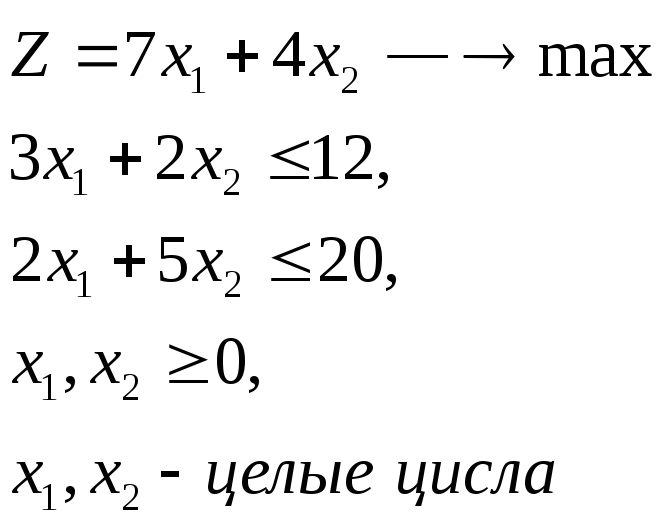
Решение:
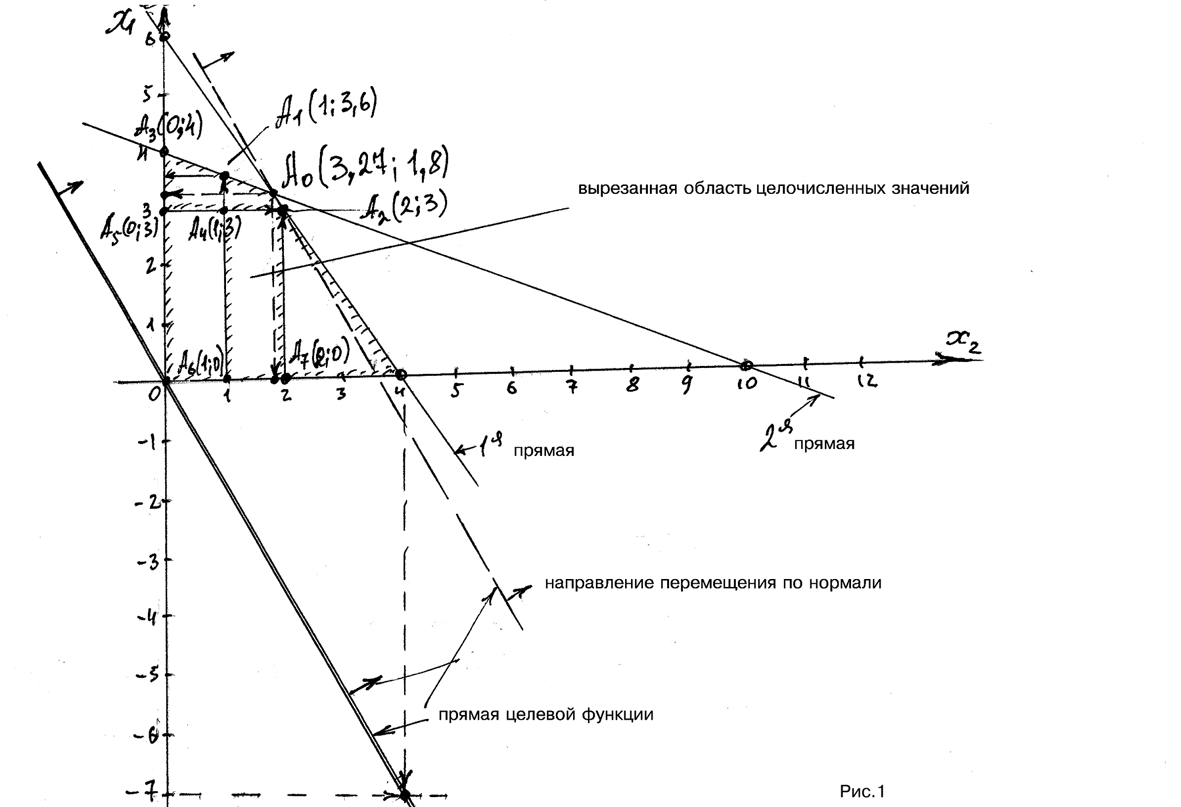
1.Находим координаты
точек каждого линейного уравнения
системы ограничений и строим прямые
1 прямая:
3х1+2х2=12
-если х1=0,
то
2х2=12,
х2=6
-если х2=
0, то 3х1=12,
х1=4
2 прямая:
2х1+5х2=20
-если х1=0,
то 5х2=20,
х2=4;
-если х2=0,
то 2х1=20,
х1=10
2.Находим ОДР.
Так как х1,
х2
≥ 0, то область
будет ограничен прямыми ОХ1
и ОХ2
и построенными прямыми (см. рис.1).
3.Находим координаты
точек целевой функции и строим прямую
целевой функции:
7х1+4х2=0
— первая точка
х1=0;
х2=0
— вторая точка
х1=4,
х2=(-7).
4.Перемещаем прямую
целевой функции по направлению через
ОДР до тех пор, пока она не станет
касательной к ней, и находим точку А0.
5.Находим координаты
точек А0
и значение
целевой функции в ней:
Х1=1,8; х2=3,27;
Z=71,8+43,27=12,6+13,08=25,68
Получен не
целочисленный оптимальный план
6.выделим область
относительно точки А0
беря целые значения 1
≤ х1
≤ 2; 3 ≤ х2
≤ 4.
Получим координаты
точек по границе этой области:
А1
(1;3,6) А2
(2;3); А3
(0;4); А4
(1;3); А5
(0;3); А6
(1;0); А7
(2;0).
7.Строим граф
(рис.2)
8.Для точек с целыми
значениями
их координат
(искомые значения х1
и х2)находим
значения целевой функции:
Для точки А2
(2;3) Z2=
72+43=26
Для точки
А3
(0;4) Z3=
70+44=16
Для точки
А4
(1;3) Z4=
71+43=19
Для точки А5
(0;3) Z5=
70+43=12
Для точки А6
(1;0) Z6=
71+40=7
Для точки А7
(2;0) Z7=
72+40=14
Так как максимальное
значение целевой функции находится для
точки А2 (2;3), то она и будет оптимальным
целочисленным решением задачи.
Ответ: Z=26;
х1=2;
х2=3.
-
Задача коммивояжера
Имеется необходимость посетить n
городов в ходе деловой поездки.
Спланировать поездку нужно так, чтобы,
переезжая из города в город, побывать
в каждом не более одного раза и вернуться
в исходный город. Определить оптимальный
маршрут посещения городов и его
минимальное расстояние.
Задана матрица расстояний между городами
cij.
Сформулированная задача — задача
целочисленная. Пусть хij
= 1 , если путешественник переезжает
из i -ого города в j-ый
и хij = 0,
если это не так.
Формально введем (n+1)
город, расположенный там же, где и первый
город, т.е. расстояния от (n+1)
города до любого другого, отличного от
первого, равны расстояниям от первого
города. При этом, если из первого города
можно лишь выйти, то в (n+1)
город можно лишь придти.
Введем дополнительные целые переменные,
равные номеру посещения этого города
на пути. u1
= 0, un+1
= n . Для того, чтобы
избежать замкнутых путей, выйти из
первого города и вернуться в (n+1)
введем дополнительные ограничения,
связывающие переменные xij
и переменные ui.
( ui
целые неотрицательные числа).
2. Математическая модель
![]()
![]()
![]()
5.5.
Пример
решения задачи.
Условия задачи:
Необходимо посетить 4 города в ходе
деловой поездки Спланировать поездку
нужно так, чтобы, переезжая из города в
город, побывать в каждом не более одного
раза и вернуться в исходный город.
Определить оптимальный маршрут посещения
городов и его минимальное расстояние.
Матрица расстояний cij
между городами задана таблицей:
-
Номер
города
1
2
3
4
1
19
25
11
2
37
26
58
3
10
50
39
4
38
39
24
Решение задачи.
Составляем математическую модель
задачи.
Zmin=19х12+25х13+11х13+37х21+26х23+58х24+10х31+50х32+39х34+38х41+39х42+24х43
х12+х13+х14=1
х21+х31+х41=1
х21+х23+х24=1
х12+х32+х42=1
х31+х32+х34=1
х13+х23+х43=1
х41+х42+х43=1
х14+х24+х34=1
U1
— U2 + 4х12 <
3
U1
–U3 + 4х13 <
3
U1
– U4+ 4х14 <
3
U2
– U3 + 4х23 <
3
U2
–U4 + 4х24 <
3
U3
– U2+ 4х32 <
3
U3
– U4 + 4х34 <
3
U4
– U2 + 4х42 <
3
U4
–U3 + 4х43 <
3
U4
– U1+ 4х41 <
3
U3
– U1 + 4х31 <
3
U2
–U1 + 4х21 <
3

0,
Хij=
— ЦЕЛЫЕ ,
1
где:
Zmin
— минимальный маршрут посещения
городов;
cij
— расстояние между городами ij
;
Ui
— номер посещения i – го
города.
Строим граф посещения городов с
учетом возможных маршрутов движения
коммивояжера.
Граф посещения городов:
|
1 |
|
2 |

|
3 |
|
4 |

|
3 |

|
4 |

|
2 |
|
4 |
|
3 |
|
2 |
|
|

|
|

|
4 |
|
2 |
|
2 |
|
3 |
|
1 |
|
1 |
|
1 |











19
25
11
58
50 39
24 39
26
39 24 58
39 50 26




38 10 38
37 37 10
122 111 171
140 122
86
где:
— расстояние между
городами;
— расстояние, пройденное
по маршруту;
— расстояние, пройденное
по минимальному маршруту.
|
4 |
Номер города
Ответ:
Минимальный маршрут: 1
— 4 — 2 — 3 — 1 .
Минимальное расстояние – 86 ед.
-
Динамическое программирование.
Постановка задачи.
Динамическое
программирование – раздел оптимального
программирования (оптимального
управления), в котором процесс принятия
решения и управления, может быть разбит
на отдельные этапы (шаги).
Динамическое
программирование позволяет свести одну
сложную задачу со многими переменными
ко многим задачам с малым числом
переменных. Это значительно сокращает
объем вычислений и ускоряет процесс
принятия управленческого решения.
Экономический
процесс является управляемым, если
можно влиять на ход его развития.
Управление
– совокупность решений, принимаемых
на каждом этапе для влияния на ход
развития процесса.
Операция –
управляемый процесс, т.е. мы можем
выбирать какие-то параметры, влияющие
на ход процесса и управлять шагами
операции, обеспечивать выигрыши на
каждом шаге и в целом за операцию.
Решение на каждом
шаге называется «шаговым управлением».
Совокупность всех
шаговых управлений представляет собой
управление
операцией в целом.
При распределении
средств между предприятиями шагами
целесообразно считать номер очередного
предприятия; при распределении на
несколько лет ресурсов деятельности
предприятия – временной период. В других
задачах разделение на шаги вводится
искусственно.
Требуется найти
такое управление (х),
при котором
выигрыш обращался бы в максимум:
F(x)=
![]()
Где F
– выигрыш за операцию;
Fi(xi)
– выигрыш
на i-м
шаге;
х –
управление операцией в целом;
хi
– управление на i-м
шаге (i=1,2,…,m).
В общем случае шаговые управления (х1,
х2,
… хm)
могут стать числами, векторами, функциями.
То управление
(х*), при котором достигается максимум,
называется оптимальным управлением.
Оптимальность управления состоит из
совокупности оптимальных шаговых
управлений х*
= х*1,
х*2,
… х*m
F* = max {F*(х*)} –
максимальный выигрыш, который достигается
при оптимальном управлении х*.
Исходя из условий,
каждой конкретной задачи длину шага
выбирают таким образом, чтобы на каждом
шаге получить простую задачу оптимизации
и обеспечить требуемую точность
вычислений.
Транспортная задача линейного программирования
Время на прочтение
11 мин
Количество просмотров 28K

Транспортная задача линейного программирования относится к перечню классических задач, решаемых в практике деятельности людей. Эта задача методами классической математики не решается. В задаче необходимо отыскивать экстремум целевой функции. В задаче целевая функция – линейная. Ограничения на переменные (их может быть очень много) описываются также линейными зависимостями. Казалось бы чего проще. Но как раз ограничения и порождают трудности, связанные не просто с поиском max и min при отсутствии ограничений, а с необходимостью учета таких ограничений. Искать требуется не просто экстремум, а условный экстремум. Методы решения задачи позволяют учитывать особенности структуры задачи и даже отказаться от симплексного метода решения в чистом виде.
I. Основные параметры, термины и обозначения
Для ощущения масштаба задачи приведу парочку изображений того, что рассматривается в транспортной задаче линейного программирования.

Зеленый цвет — пассажирские суда, желтые — грузовые, розовый — частные яхты, оранжевый — танкеры и др. Аналогичная картина наблюдается и для авиационных перевозок, перевозок по железной дороге или автотранспортом. Изображения получены в начальном периоде Пандемии короновируса, что привело к огромным пробкам в узостях мирового Океана (Панамский, Суэцкий и др. каналы). Танкеры отправили отстаиваться на рейде, экипажам судов на берег сойти не разрешалось. Это форс-мажорные обстоятельства, которые в теории должны рассматриваться и учитываться специальным образом, что пока к сожалению перевозчиков не сделано.

В теории в тексте задачи Хичкока ничего не говорится о равенстве имеющегося общего запаса судов в портах отправления и общей потребности в судах в портах прибытия (назначения). Если такого равенства нет, то система ограничений несовместна. В случае равенства

транспортная задача называется «сбалансированной». Задачи, в которых условие баланса не задано, должны быть приведены к «сбалансированному» виду. Это можно выполнить использованием «фиктивных» перевозок. Рассматриваем два случая:


Поэтому ранг системы равен не n+m, а n+m – 1, т.е с mn неизвестными. Общее число опорных планов равно числу сочетаний из mn по n+m – 1.. Применение симплекс метода для решения задачи возможно, но требует большого объема вычислений уже при n и m ≈ 10 -15. Заметим также, что каждая неизвестная входит лишь в два уравнения системы (матрица коэффициентов системы ограничений имеет в каждой строке и каждом столбце только два ненулевых элемента). Более того, транспортная задача всегда имеет допустимое решение. Все сказанное вызвало потребность попытаться учесть специфику задачи и создать метод ее решения более простой, чем симплекс метод. Такие методы были найдены и получили названия метода потенциалов и распределительного метода. Это разновидности симплексного метода. Они удобно реализуются, если условие задачи представлено в виде таблиц.
ТАБЛИЦА 1 — Вид данных транспортной задачи линейного программирования

Метод содержит три последовательных этапа:
-
Формирование опорного плана;
-
Проверка опорного плана на оптимальность;
-
Переход к новому опорному плану, если предыдущий не оптимален.

II. Формирование опорного плана перевозок
Рассмотрим способ получения начального опорного плана транспортной задачи, названный способом северо-западного (С-З) угла. Способ заключается в заполнении ячеек таблицы m×n значениями переменной xij, таким образом, чтобы удовлетворялись условия задачи. При этом план решения Х[m, n] может быть и не оптимальным, но обязательно должен быть допустимым.
В этом способе формируют опорный план, двигаясь по таблице: сверху вниз по строкам и слева направо вдоль строки. Начинают с левого верхнего угла (ячейки), куда вписывают значение x11 =min{a1, b1}.Первые строка и столбец из рассмотрения далее исключаются.
Затем, если a1 > b1, то определяется остаток (a1 – b1) продукта на первом пункте отправления и его запас реализуется на 2-м пункте назначения. Остаток потребностей 2-го пункта назначения удовлетворяется за счет 2-го пункта отправления, остатки которого направляются в 3-й пункт назначения и т.д. Ниже метод будет иллюстрирован числовым примером.
Пример 1. Построение опорного плана методом Северо-Западного угла
Заданы значения: m = 3, n = 4; a1 = 60, a2 = 80, a3 =100, b1 = 40,b2 = 60, b3 = 80, b4 = 60. Слева в таблице приведены dij удельные стоимости перевозок; справа — Вij стоимости совместно с предложениями ai и потребностями bj .

Требуется найти план Х [m,n] перевозок, удовлетворяющий условиям на целевую функцию Q и переменные хij задачи Q.
РЕШЕНИЕ Построить исходный опорный план способом северо-западного угла. Строим симплексную таблицу: Таблица 3. Опорный план задачи

В таблице способом северо-западного угла получен опорный план. Базисные переменные (их число = 6): x11 = 40, x12= 20, x22= 40, x23= 40, x33= 40, x34= 60. Свободные переменные: x13= x14= x21= x24= x31= x32= 0 (их число равно 6).
Ячейки таблицы, соответствующие базисным переменным, называют базисными, остальные – свободными. Далее в алгоритме будем следовать идее симплекс метода. Суммарная стоимость перевозок Q, соответствующая плану Х[m,n], получает представление
Q = d11∙x11 + d12∙x12 + d22∙x22 + d23 ∙x23+ d33 ∙x33+ d34 ∙x34 = = 5∙40 + 2∙20 + 10∙40 + 2∙40 + 8∙40 + 5∙60 = 200+40+400 + 80 + 320+ 300 = 1340 ед

Коэффициенты dij называются фиктивными или косвенными стоимостями; их выражают через косвенные величины α и β, d’ij = αi +βj . Здесь параметры αi и ( — βj ), по аналогии с механикой называют потенциалами i-го пункта отправления и j-го пункта прибытия. Значения потенциалов определяется из системы линейных уравнений: αi + βj = dij Каждому из таких уравнений соответствует какая-либо базисная переменная хij Система уравнений с потенциалами содержит m+n неизвестных потенциалов, число же уравнений равняется числу базисных ячеек таблицы, т.е. (m + n – 1). Следовательно, один из потенциалов можно задать произвольно, положив его равным, например, нулю.
Решая далее систему уравнений для потенциалов, находим значения потенциалов строк и столбцов, все фиктивные стоимости dij и коэффициенты γij. Если для всех свободных клеток γrs ≤ 0, то перевод в базис любой свободной переменной не уменьшит значения целевой функции и, следовательно, выбранный опорный план не является оптимальным. Если же некоторые γrs >0, то данный план можно улучшить путем перевода в базис свободной переменной, соответствующей max γrs, а также путем исключения из базиса, принадлежащей ему переменной, первой обращающейся в нуль. Переход к новому опорному плану и поиск оптимального плана рассмотрим на примере. Другой способ формирования опорного плана предложен Фогелем. Этот способ при первом чтении можно пропустить, так как дальше он в тексте не используется.
Пример 2. Способ аппроксимации Фогеля
В большинстве случаев этот способ дает опорный план наиболее близкий к оптимальному. Удобен для матриц большой размерности. Используется концепция штрафов, взимаемых за выбор не самого оптимального с точки зрения транспортных издержек маршрута. Штраф по каждой строке и каждому столбцу определяется из анализа маршрутов с различными показателями издержек (как разность двух различных уровней транспортных издержек). Первой заполняется клетка матрицы (таблицы), в которой фиксируется самый крупный штраф. После заполнения клетки штрафы пересчитываются и так до тех пор, пока все ресурсы не будут распределены. Исходные данные для этого примера заполняют таблицу слева вверху.
Этапы алгоритма: 1. Вычисление разностей в каждой строке и в каждом столбце между наименьшей стоимостью и ближайшей к ней по величине. Разности по строкам записываются справа в столбце разностей, разности по столбцам – внизу в строке разностей. Например, для строк А1 разность равна А1В2 – А1В3 = 38 – 24 = 14 и т. д.
ТАБЛИЦА 2 — Метод Фогеля для получения опорного плана транспортной задачи
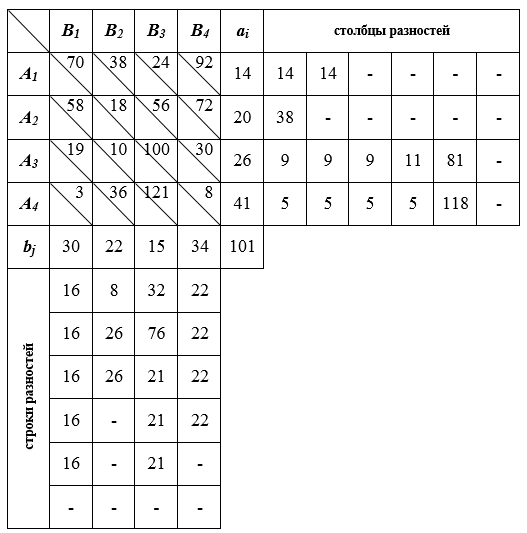
2. Поиск из всех разностей, как по строкам, так и по столбцам максимальный. В нашем примере максимальная разность равна 38 и находится в строке А2. Обведем максимальную разность рамкой.
3. Размещение в клетку, где находится наименьшая стоимость (А2В2 = 18) (строка с наибольшей разностью), максимально возможного количества ресурсов. Оно равно 20, т.е. всему ресурсу отправителя А2. Поскольку все ресурсы отправителя А2 исчерпаны, строку А2 исключаем из дальнейших расчетов, для чего отметим все клетки этой строки точками.
4. Вычисление разностей столбцам и строкам, не принимая во внимание стоимость в клетках, имеющих ресурсы и клетках с точкой (исключенную строку или столбец) и определение максимальной разности в строке или столбце (В3 = 76).
5. Поиск минимального элемента в строке или в столбце с максимальной разностью (А1В3 = 24) и размещения в данную клетку максимально возможного количества ресурса, возвращение к этапу №4 и т.д. Окончательно
ЦФ Q=23∙19 + 7∙3 + 20∙18 + 2∙10 + 14∙24 + 1∙100 +3∙48 = = 437 + 21 + 360 + 20 +3 36 + 100 + 272 =1546 ед. Это значение соответствует опорному плану Фогеля.
III. Транспортная задача линейного программирования
Как основной метод решения транспортной задачи – используется метод потенциалов. Ни симплексный метод, ни распределительный метод здесь не рассматриваются. У них имеются свои плюсы и минусы, но объем изложения достаточно велик. Возможно этому позднее я уделю внимание и время, но пока отвечаю на пожелание читателя Хабра.
Пример 3 — Транспортная задача. Метод потенциалов
Исходные данные задачи удобно представить двумя матрицами.
ТАБЛИЦА — Исходные данные

Требуется найти план Х [m,n] перевозок, удовлетворяющий условиям на целевую функцию Q и переменные хij задачи
Решение задачи:
1. Формирование начального опорного плана способом Северо-Западного угла.
Базисные n + m – 1 = 3 + 4 – 1 = 6 переменные:
x11 =70, x12 = 20, x22 = 10, x23 = 20, x24 = 0, x34 = 40.
Остальные переменные nm – n + m – 1 = 12 – 6 = 6 свободные:
x13 = x14 = x21 = x24 = x31= x32 = 0 .
Суммарная стоимость перевозок для опорного плана получает представление:
Q = d11 ∙x11 + d12∙x12 + d22∙x22 + d23∙x23+ d24∙x24+ d34∙x34 =
=2∙70 + 3∙20 + 3∙10 + 1∙20 + 2∙0 + 2∙40 = 140 + 60 + 30 + 20 + 0 +80 = 330 ед.
2. Проверка опорного плана на оптимальность
Является ли найденный опорный план оптимальным? Ответ может быть получен после составления и решения системы уравнений для потенциалов. Определим систему уравнений для потенциалов и вычислим их значения:
α1 + β1 = d11 = 2;
α1 + β2 = d12 = 3;
α2 + β2 = d22 = 3;
α2 + β3 = d23 = 1;
α2 + β4 = d24 = 2;
α3 + β4 = d34 = 2.
Каждое из этих значений соответствует одной базисной ячейке. Одну из неизвестных в системе можно задавать произвольно. Пусть β1 = 0. Тогда после решения системы получены значения потенциалов: α1= 2, α2= 2, α3= 2, β1 =0, β2=1, β3 =–1, β4 =0,
Формируем матрицу фиктивных стоимостей D'[m, n] и матрицу Г [m, n].
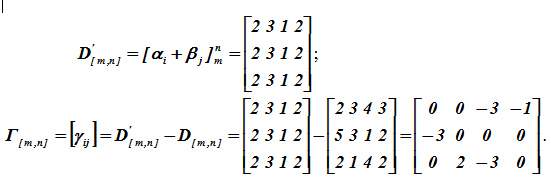
Выделяем в Г [m, n] свободные ячейки, содержащие γrs. Проверяем наличие положительных переменных γi,j > 0. Так как в матрице (в свободных ячейках) имеем γ32 = 2 > 0, то исходный опорный план может быть улучшен, он не является оптимальным.
3. Переход к новому (улучшенному) опорному плану
Переменную x32 =x следует ввести в базис. Обозначим ее предварительно через x без индексов. С учетом того, что х должна быть положительна х > 0. Найдем значение max x при условии сохранения баланса перевозок. Для этого воспользуемся начальным опорным планом. Будем добавлять переменную х в ячейки таблицы так, чтобы сохранялись условия баланса перевозок

Обозначим ее предварительно через x без индексов. С учетом того, что х должна быть положительна х > 0. Найдем значение max x при условии сохранения баланса перевозок. Для этого воспользуемся начальным опорным планом. Будем добавлять переменную х в ячейки таблицы так, чтобы сохранялись условия баланса перевозок Очевидно, что наибольшее x определяется теми xij в базисных клетках, из которых этот х вычитается. Следовательно, x11 = min{х22, х34} = {10, 40} = 10. При x >10 перевозка х22 становится отрицательной. Переменную х22 исключаем из базиса и переводим ее в разряд свободных переменных. Далее повторяются рекурсивно три пункта алгоритма.
-
Получаем из модифицированного плана новый опорный план
В нем объемы перевозок распределены иначе чем в начальном опорном плане.

Суммарная стоимость перевозок для этого опорного плана получает представление:
Q = d11 ∙x11 + d12∙x12 + d23∙x23 + d32∙x32 + d24∙x24+ d34∙x34 =
=2∙70 + 3∙20 + 2∙10 + 1∙20 + 1∙10 + 2∙30 = 140 + 60 + 20 + 20 + 10 + 60 = 310 ед. Затраты на перевозки при этом плане уменьшились на 330 – 310 = 20 ед.
Является ли найденный опорный план оптимальным? Ответ может быть получен после составления и решения системы уравнений для потенциалов.
2. Проверка опорного плана на оптимальность
Определим систему уравнений для потенциалов и вычислим их значения:
α1 + β1 = d11 = 2;
α1 + β2 = d12 = 3;
α2 + β3 = d23 = 1;
α2 + β4 = d24 = 2;
α3 + β2 = d32 = 1;
α3 + β4 = d34 = 2.
Каждое из этих значений соответствует одной базисной ячейке. Одну из неизвестных в системе можно задавать произвольно. Пустьα1 = 0. Тогда после решения системы получены значения потенциалов: α1= 0, α2= – 2, α3= –2, β1 =2, β2=3, β3 = 3, β4 =4.
Формируем матрицу фиктивных стоимостей D'[m, n] и матрицу Г [m, n].

Свободные ячейки матрицы Г [m, n] содержат γi,j > 0 (γ14 = 1>0). План не оптимален.
3. Переход к новому (улучшенному) опорному плану
Из свободных переменных с xij > 0, выбираем одну x14 для введения ее в базис. Обозначим ее как и ранее через x без индексов. С учетом того, что х должна быть положительна х > 0. Найдем значение max x при условии сохранения баланса перевозок. Для этого воспользуемся очередным опорным планом. Будем добавлять переменную х в ячейки таблицы так, чтобы сохранялись условия баланса перевозок

Очевидно, что наибольшее x определяется теми xij в базисных клетках, из которых этот х вычитается. Следовательно, x11 = min{х12, х34} = {20, 30} = 20. При х12 >20 перевозка х12 становится отрицательной. Переменную х12 исключаем из базиса и переводим ее в разряд свободных переменных. Переходим к новой итерации
1. Получаем из модифицированного плана новый опорный план.
В нем объемы перевозок распределены иначе чем в предшествующем опорном плане.

Суммарная стоимость перевозок для этого опорного плана получает представление:
Q = d11 ∙x11 + d14∙x14 + d23∙x23 + d32∙x32 + d24∙x24+ d34∙x34 =
=2∙70 + 3∙20 + 1∙20 + 2∙10 + 1∙30 + 2∙10 = 140 + 60 + 20 + 20 + 30 + 20 = 290 ед. Затраты на перевозки при этом плане уменьшились на 310 – 290 = 20 ед. Является ли найденный опорный план оптимальным? Ответ может быть получен после составления и решения системы уравнений для потенциалов.
2. Проверка опорного плана на оптимальность
Определим систему уравнений для потенциалов и вычислим их значения:
α1 + β1 = d11 = 2;
α1 + β4 = d14 = 3;
α2 + β3 = d23 = 1;
α2 + β4 = d24 = 2;
α3 + β2 = d32 = 1;
α3 + β4 = d34 = 2. Каждое из этих значений соответствует одной базисной ячейке. Одну из неизвестных в системе можно задавать произвольно. Пусть β1 = 0. Тогда после решения системы получены значения потенциалов: α1= 2, α2= 2, α3= 2, β1 =0, β2=1, β3 =–1, β4 =0.
Формируем матрицу фиктивных стоимостей D'[m, n] и матрицу Г [m, n].

При переходе к новому опорному плану проверяем наличие положительных свободных переменных γi,j >0. Но таких переменных не оказалось. Отсюда следует вывод, что полученный последним модифицированный план является оптимальным и ему соответствует значение линейной формы
Q’= 2∙70 + 3∙20 + 1∙20 + 2∙10 + 1∙30 + 2∙10 = 290.
Заключение
Вся теория исследования операций с позиций математики решает неклассические задачи оптимизации целевых функций. Отличие от классики в том, что те ограничения на переменные, которые исследователи вынуждены накладывать в рамках моделей, созданы и вызваны реальностью. Отыскивать требуется экстремумы функций при многих ограничениях, так называемые условные экстремумы. Классика не позволяет этого делать. Взятие производных и приравнивание их нулю «не видит» ограничений. Лучшее, что там имеется это функция Лагранжа, но ее использование также весьма ограничено. Транспортные задачи – частный, но важный случай в исследовании операций. Надеюсь, что читатель разобравшись в приведенных примерах, лучше стал понимать логику задачи и сумеет самостоятельно постигать интересующие его вопросы по другим публикациям в учебниках и журнальных статьях.
Литература
-
Ваулин А. Е. Методы цифровой обработки данных.– СПб.: ВИККИ им. А. Ф. Можайского, 1993.– 106 с.
-
Гэри М., Джонсон Д. Вычислительные машины и трудно решаемые задачи. М.: Мир, 1982.
-
Корбут А.А., Финкельштейн Ю. Ю. Дискретное программирование М. Наука. Гл. ред. физ.-мат. лит. 1969.
-
Макаров И. М. и др. Теория выбора и принятия решений.– М.: Наука, 1982.– 328 с.
-
Пфанцагль И. Теория измерений. – М.: Наука, 1988.–384 с.
-
Таха Х. А. Введение в исследование операций. 7-е изд. М.: Изд. дом «Вильямс», 2005.
-
Фишберн П. С. Теория полезности для принятия решений. – М.: Наука,1978. –352 с.
Транспортная задача. Методы решения
Транспортная задача, это специальный вид задачи линейного программирования. Для решения транспортной задачи можно использовать методы решения задач линейного программирования, однако ввиду специфического вида задачи, были построены алгоритмы специально для решения этой задачи. Для решения транспортной задачи в онлайн режиме с подробными пояснениями пользуйтесь калькулятором транспортная задача онлайн.
- Содержание
- 1. Математическая постановка транспортной задачи
- 2. Определение опорного плана. Предварительные сведения
- 3. Метод северно-западного угла
- 4. Метод минимального элемента
- 5. Метод аппроксимации Фогеля
- 6. Метод потенциалов
- 7. Метод дифференциальных рент
1. Математическая постановка транспортной задачи.
Общая постановка транспортной задачи заключается в определении оптимального плана перевозок некоторого однородного груза из пунктов отправления A1, A2,…, Am в пункты назначения B1, B2,…, Bn. Критерий оптимальности берется минимальная стоимость перевозки или минимальное время доставки груза.
Рассмотрим транспортную задачу, где в качестве критерия оптимальности взята минимальная стоимость перевозок всего груза. Обозначим через Сij тарифы перевозки единицы груза из пункта отправления i в пункт назначения j. Обозначим через Ai запасы груза i-м пункте отправления, а через Bj потребности груза j-м пункте назначения, а через Xj количество единиц груза переводимого из пункта отправления i в пункт назначения j.
Тогда математическая модель транспортной задачи состоит в определении минимального значения функции
 |
(1.1) |
при условиях
 |
(1.2) |
 |
(1.3) |
 |
(1.4) |
Поскольку удовлетворяется условия (1.2)−(1.4), то обеспечивается доставка необходимого количества груза в каждый из пунктов назначения, вывоз груза из всех пунктов отправления, а также исключаются обратные перевозки.
Определение 1. Любое неотрицательное решение Xij=∥xij∥ (i=1,..,m; j=1,…,n) систем (1.2) и (1.3) называется допустимым планом транспортной задачи.
Определение 2. План  при котором функция (1.1) принимает минимальное значение, называется оптимальным планом транспортной задачи.
при котором функция (1.1) принимает минимальное значение, называется оптимальным планом транспортной задачи.
Если сумма груза у поставщиков равно общей сумме потребностей в пунктах назначения:
 |
(1.5) |
то модель транспортной задачи называется закрытой (или сбалансированной). Если (1.5) не удовлетворяется, то модель транспортной задачи называется открытой (или несбалансированной).
Теорема 1. Для разрешимости транспортной задачи необходимо и достаточно, чтобы выполнялось условие (1.5).
В случае превышения запаса над потребностью, т.е. при
 , , |
вводится фиктивный (n+1)-ый пункт назначения с потребностью
 . . |
Соответствующие тарифы считаются равными нулю: ci n+1=0 (i=1,…,m). После этих преобразований получим закрытую модель транспортной задачи.
Аналогично, при  вводится фиктивный (m+1) пункт отправления с грузом
вводится фиктивный (m+1) пункт отправления с грузом  а тарифы полагаются равными нулю: cm+1j=0 (j=1,…,n). После этих преобразований получим закрытую модель транспортной задачи.
а тарифы полагаются равными нулю: cm+1j=0 (j=1,…,n). После этих преобразований получим закрытую модель транспортной задачи.
Мы будем рассматривать закрытую модель транспортной задачи. Если же модель транспортной задачи является открытой, то с помощью вышеизложенных преобразований строим закрытую модель транспортной задачи.
Обычно данные транспортной задачи записывают в виде таблицы:
Число переменных Xij равно mn, где m число пунктов отправнения , а n число пунктов назначения. Число уравнений в (1.2) и (1.3) равно m+n. Так как мы рассматриваем закрытую модель транспортной задачи (выполняется равенство (1.5)), то число линейно независимых уравнений равно m+n−1. Следовательно опорный план транспортной задачи может иметь не более m+n−1 отличных от нуля неизвестных.
Если в опорном плане количество отличных от нуля компонентов равно в точности m+n−1, то опорный план называется невырожденным, а если меньше − то вырожденным.
Для решения транспортной задачи сначала определяется начальный опорный план, а затем определяется оптимальный план путем улучшения текущего опорного плана.
Для определения начального опорного плана существует несколько методов. Мы рассмоьтрим три метода. Метод северно-западного угла, метод минимального элемента и метод аппроксимации Фогеля.
2. Определение опорного плана. Предварительные сведения
Опорный план транспортной задачи находим следующим образом. На каждом шаге в таблице условий задачи заполняем одну клетку, которая называется занятой. Обозначим через Kij клетку, где i -номер пункта отправления (строка), j-номер пункта назначения (столбец). Клетку Kij заполняем так, чтобы удовлетворялись полностью потребности пункта назначения j, либо обеспечивался полный вывоз груза из пункта отправления i.
В первом случае временно исключаем из рассмотрения столбец j и изменяем запас груза пункта отправления i. Во втором случае временно исключаем из рассматрения строку i и изменяем потребность груза пункта назначения j. Далее повторяем процедуру с таблицей условий с исключенной строкой или столбцом.
В m+n−1-ом шаге получаем задачу с одним пунктом отправления и одним пунктом назначения. Остается свободной одна клетка. Запасы оставшегося пункта отправления будут равны потребностям пункта назначения. Заполнив эту клетку заканчиваем m+n−1-ый шаг и получаем опорный план.
Если на некотором шаге (но не на последнем) потребности очередного пункта назначения равны запасам пункта отправления, то временно исключаем из рассмотрения либо столбец, либо строку (только одно из двух). Тогда либо запасы данного пункта отправления, либо потребности данного пункта назначения считаем равным нулю. Этот нуль при очередном шаге записываем в очередную заполняемую клетку. Данный подход обеспечивает ровно m+n−1 занятых клеток, что обеспечивает возможность проверки полученного опорного плана на оптимальность и нахождение оптимального плана.
Для нахождения опорного плана транспортной задачи в онлайн режиме тремия методами с подробными пояснениями пользуйтесь калькулятором транспортная задача онлайн.
3. Метод северно-западного угла
При нахождении опорного плана транспортной задачи методом северно-западного угла, заполнене клеток таблицы условий начинают с верхней левой клетки K11 поэтому метод и называется «метод северно западного угла»).
Рассмотрим метод на конкретном примере.
Пример 1. На три базы A1, A2, A3 поступил очередной груз в количествах равных 140, 160, 120 ед. Этот груз требуется перевезти в четыре пунктов назначения B1, B2, B3, B4 в количествах 150, 90, 100, 80. Тарифы перевозок представлена матрицей
 . . |
Найти план перевозок даной транспортной задачи методом северно-западного угла.
Решение. Запишем все данные в таблицу условий:
Число пунктов отправления m=3, а число пунктов назначения n=4. Следовательно опорный план задачи определяется числами, стоящими в m+n−1=3+4−1=6 заполненых клетках таблицы.
Наличие груза у поставщиков равно: ∑Ai=140+160+120=420.
Общая потребность в грузе в пунктах назначения равна: ∑Bj=150+90+100+80=420.
∑Ai=∑Bj. Модель транспортной задачи является закрытой. Следовательно она разрешима.
Найдем опорный план задачи методом северно-западного угла.
A1≤B1. Следовательно в клетку (A1, B1 ) помещаем число min(A1, B1)=140. Запасы пункта A1 полностью исчерпаны. Поэтому исключаем из рассмотрения строку A1 и будем считать потребности пункта B1 равными 150−140=10.
A2>B1. Следовательно в клетку (A2, B1) помещаем число min(A2, B1)=10. Потребности пункта B1 полностью удовлетворены. Поэтому исключаем из рассмотрения столбец B1 и будем считать запасы пункта A2 равными 160−10=150.
Таким образом, продолжая процедуру в m+n−1-ом шаге получим:
Запишем полученный опорный план:
При этом плане стоимость перевозок вычисляется так:
F=2·140+8·10+4·90+ 1·60+3·40+6·80=1380.
4. Метод минимального элемента
В отличие от метода северно-западного угла, в методе минимального элемента выбор пунктов отправления и пунктов назначения производится ориентируясь на тарифы перевозок, т.е. в каждом шаге нужно выбрать клетку с минимальным тарифом перевозок. Если таких клеток несколько, то выбираем один из них. Надо отметить, что при данном методе определения заполняемой клетки, стоимость перевозок как правило бывает меньше, чем при методе северно западного угла. Поэтому целесообразно начальный опорный план найти методом минимального элемента.
Рассмотрим метод минимального элемента на примере.
Пример 2. Найти опорный план транспортной задачи представленной в таблице условий ниже методом минимального элемента:
Число пунктов отправления m=3, а число пунктов назначения n=4. Следовательно опорный план задачи определяется числами, стоящими в m+n−1=3+4−1=6 заполненых клетках таблицы. Тарифы перевозок единицы груза из кажного пункта отправления во все пункты назначения задаются матрицей
Наличие груза у поставщиков равно:  .
.
Общая потребность в грузе в пунктах назначения равна:  .
.
 Модель транспортной задачи является закрытой. Следовательно она разрешима.
Модель транспортной задачи является закрытой. Следовательно она разрешима.
Минимальный тариф равный 1 находится в клетке (A1, B3). Поэтому заполняем эту клетку.
A1>B3. Следовательно в клетку (A1, B3) помещаем число 70. Потребности пункта B3 полностью удовлетворены. Поэтому исключаем из рассмотрения столбец B3 и будем считать запасы пункта A1 равными 150−70=80.
Минимальный тариф равный 1 находится в клетке (A2, B4). Поэтому заполняем эту клетку.
A2>B4. Следовательно в клетку (A2, B4) помещаем число 40. Потребности пункта B4 полностью удовлетворены. Поэтому исключаем из рассмотрения столбец B4 и будем считать запасы пункта A2 равными 100−40=60.
Таким образом, продолжая процедуру в m+n−1-ом шаге получим:
Запишем полученный опорный план:
При этом плане стоимость перевозок вычисляется так:
5. Метод аппроксимации Фогеля
Суть метода аппроксимации Фогеля заключается в следующем. Для каждой строки и для каждого столбца находим разности между двумя записанными в них минимальными тарифами. Полученные разности записываем в специально отведенные для этого столбце и в строке в таблице условий задачи.
Среди указанных разностей выбираем максимальную. В строке (или в столбце), которой данная разность соответствует, определяем минимальный тариф. Клетку, в которой он записан заполняем на данной итерации.
Если минимальный тариф одинаков для нескольких клеток данной строки (столбца), то для заполнения выбираем ту клетку, которая соответствует наибольшей разности между двумя минимальными тарифами в данном столбце (строке).
Применение метода аппроксимации фогеля позволяет получить либо опорный план, близкий к оптимальнму, либо сам оптимальный план.
Рассмотрим метод аппроксимации Фогеля на примере 2, рассмотренной выше.
Пример 3. Найти опорный план транспортной задачи представленной в таблице условий ниже методом аппроксимации Фогеля:
Число пунктов отправления m=3, а число пунктов назначения n=4. Следовательно опорный план задачи определяется числами, стоящими в m+n−1=3+4−1=6 заполненых клетках таблицы. Тарифы перевозок единицы груза из кажного пункта отправления во все пункты назначения задаются матрицей
Наличие груза у поставщиков равно: .
Общая потребность в грузе в пунктах назначения равна: .
Модель транспортной задачи является закрытой. Следовательно она разрешима.
Для каждой строки Ai найдем разности между двумя минимальными тарифами, записанными в данной строке и поместим их в соответствующем дополнительном столбце.
В строке 1 минимальный тариф равен 1, а следующий за ним равен 2, разность между ними 2−1=1. В строке 2 минимальный тариф равен 1, а следующий за ним равен 3, разность между ними 3−1=2. В строке 3 минимальный тариф равен 3, а следующий за ним равен 3, разность между ними 3−3=0.
Для каждого столбца Bj найдем разности между двумя минимальными тарифами, записанными в данном столбце и поместим их в соответствующей дополнительной строке.
В столбце 1 минимальный тариф равен 2, а следующий за ним равен 3, разность между ними 3−2=1. В столбце 2 минимальный тариф равен 3, а следующий за ним равен 4, разность между ними 4−3=1. В столбце 3 минимальный тариф равен 1, а следующий за ним равен 3, разность между ними 3−1=2. В столбце 4 минимальный тариф равен 1, а следующий за ним равен 2, разность между ними 2−1=1.
Вычислив все разности выберем наибольшую из них. В данном случае наибольшая разница равна 2. В этом столбце минимальный тариф равен 1 и находится в пересечении строки A 1 и столбца B3. Следовательно заполняем эту клетку.
A1>B3. Следовательно в клетку помещаем число 70. Потребности пункта B3 полностью удовлетворены. Поэтому исключаем из рассмотрения столбец B3 и будем считать запасы пункта A1 равными 150−70=80.
Для каждой строки Ai найдем разности между двумя минимальными тарифами, записанными в данной строке и поместим их в соответствующем дополнительном столбце.
В столбце 1 минимальный тариф равен 2, а следующий за ним равен 3, разность между ними 3−2=1. В столбце 2 минимальный тариф равен 3, а следующий за ним равен 4, разность между ними 4−3=1. В столбце 3 минимальный тариф равен 1, а следующий за ним равен 3, разность между ними 3−1=2. В столбце 4 минимальный тариф равен 1, а следующий за ним равен 2, разность между ними 2−1=1. В строке 1 минимальный тариф равен 2, а следующий за ним равен 2, разность между ними 2−2=0. В строке 2 минимальный тариф равен 1, а следующий за ним равен 3, разность между ними 3−1=2. В строке 3 минимальный тариф равен 3, а следующий за ним равен 4, разность между ними 4−3=1.
Для каждого столбца Bj найдем разности между двумя минимальными тарифами, записанными в данном столбце и поместим их в соответствующей дополнительной строке.
В столбце 1 минимальный тариф равен 2, а следующий за ним равен 3, разность между ними 3−2=1. В столбце 2 минимальный тариф равен 3, а следующий за ним равен 4, разность между ними 4−3=1. В столбце 4 минимальный тариф равен 1, а следующий за ним равен 2, разность между ними 2−1=1.
Вычислив все разности выберем наибольшую из них. В данном случае наибольшая разница равна 2. В этой строке минимальный тариф равен 1 и находится в пересечении строки A2 и столбца B4. Следовательно заполняем эту клетку.
A2>B4. Следовательно в клетку помещаем число 40. Потребности пункта B4 полностью удовлетворены. Поэтому исключаем из рассмотрения столбец B4 и будем считать запасы пункта A2 равными 100−40=60.
Таким образом, продолжая процедуру в m+n−1-ом шаге получим:
Запишем полученный опорный план:
При этом плане стоимость перевозок вычисляется так:
F=2·40+3·40+1·70+ 4·60+1·40+3·100=850.
Для определения оптимального плана транспортной задачи разработано нескольно методов. Мы расмотрим метод потенциалов и метод дифференциальных рент.
6. Метод потенциалов
Процедура нахождения оптимального плана транспортной задачи имеет два этапа. На первом этапе находят опорной план транспортной задачи. Далее последовательно улучшают найденный опорный план до получения оптимального плана.
Для определения опорного плана будем пользоваться методом северно-западного угла, методом минимального элемента или методом аппроксимации Фогеля рассмотренных выше.
Для онлайн решения задачи методом потенциалов пользуйтель калькулятором транспортная задача онлайн.
При применении этих методов получаем m+n−1 занятых клеток в исходном плане. Отметим, что в некоторых клетках могут стоять нули. Полученный план следует проверить на оптимальность.
Теорема. Если для некоторого опорного плана  (i=1,..,m; j=1,…,n) транспортной задачи существуют такие числа α1, α1, …, αm, β1, β2, …, βn, что
(i=1,..,m; j=1,…,n) транспортной задачи существуют такие числа α1, α1, …, αm, β1, β2, …, βn, что
для всех i=1,..,m; j=1,…,n, то − оптимальный план транспортной задачи.
Определение 6.1. Числа αi и βj (i=1,..,m; j=1,…,n) называются потенциалами пунктов отправления и пунктов назначения, соответственно.
Вышеизложенная теорема позволяет построить алгоритм нахождения оптимального плана транспортной задачи.
Алгоритм состоит в следующем. Предположим, что одним из рассмотренных выше методов найден опорный план транспортной задачи. Для каждого из пунктов отправления и назначения определяют потенциалы αi и βj (i=1,..,m; j=1,…,n) из системы уравнений
где сij − тарифы транспортной задачи в заполненных клетках.
Так как число заполненных клеток равно m+n−1, то система (6.1) с m+n неизвестными содержит m+n−1 уравнений. Для решения данной задачи одно из неизвестных можно сделать равным нулю и найти остальные неизвестные. После этого, для свободных клеток определяем числа
Если среди чисел αij нет положительных, то найденный опорный план является оптимальным. Если же для некоторой свободной клетки αij>0, то данный опорный план не является оптимальным и необходимо перейти к новому опорному плану. Для этого рассматривают все свободные клетки, для которых αij>0 и среди данных чисел выбирают максимальное. Клетку с данным числом следует заполнить.
Надо учитывать, что при заполнении данной клетки необходимо изменить объем поставок в нескольких других клетках.
Определение 6.2. Циклом в таблице условий транспортной задачи называется ломанная линия, вершины которой расположены в занятых клетках таблицы, а звеня расположены вдоль строк и столбцов. В каждой вершине цикла встречается два звена, одно из которых находится в строке, а другой в столбце.
Если ломаннная линия, образующая цикл, самопересекается, то место пересечения не является вершиной. Некоторые циклы представлены на рисунке Рис.6.1.
При правильном строении опорного плана для любой свободной клетки можно построить только один цикл. После построения цикла следует перейти к новому опорному плану. Для этого в каждой из клеток, находящихся на вершине цикла записывают определенный знак «+» или «−» . В свободной клетке записывают знак «+» и поочередно проходя по циклу записывают знаки «−» и «+». Назовем клетки с записанными в них знаками плюсовыми и минусовыми.
Далее в свободную клетку переносят меньшее из чисел xij, находящихся в минусовых клетках. Это число прибавляют к числам, стоящим в плюсовых клетках а вычисляют из чисел, стоящих в минусовых клетках. Клетка, которая была свободной, становится занятой, а минусовая клетка с минимальным из чисел xij, находящихся в минусовых клетках считается свободным.
В результате вышеуказанных перемещений груза по циклу, получим новый опорный план транспортной задачи. Описанный переход от одного опорного плана транспортной задачи к другому опорному плану называется сдвигом по циклу пересчета.
При сдвиге по циклу пересчета число занятых клеток не изменяется и равно m+n−1. Если в минусовых клетках имеется два и более одинаковых минимальных числа xij, то освобождают только одину, о остальные оставляют занятыми с нулевыми значениями.
Далее полученный опорный план проверяют на оптимальность. Для этого определяют потенциалы пунктов отправления и назначения и находят числа αij=βj−αi−cij для всех свободных клеток. Если среди них не окажется положительный, то получен оптимальный план. Если же среди них есть положительный, то нужно перейти к новому опорному плану. После конечнего числа шагов получяют оптимальный план.
Таким образом алгоритм нахождения оптимального плана содержит следующие этапы:
1. Нахождение опорного плана. При этом число заполненных клеток должно быть равным m+n−1.
2. Нахождение потенциалов αi и βj (i=1,..,m; j=1,…,n) пунктов отправления и назначения соответственно.
3. Определение числа αij для каждой свободной клетки. Если среди αij нет положительных, то получен оптимальный план транспортной задачи. Если же они имеются, то делается переход к новому опорному плану.
4. Выбор максимального среди положительных чисел αij . Определение свободной клетки, которую нужно заполнить. Построение цикла пересчета для выбранной свободной клетки. Сдвиг по циклу пересчета.
5. Проверка полученного опорного плана на оптимальность, т.е. переход к пункту 2.
Отметим, что в некотором шаге опорный план может стать вырожденным. Чтобы избежать зацикливания следует преобразовать вырожденный план в невыроженный путем замены соответствующий нулевых элементов опорного плана на сколь угодно малыми положительными числами δ и решить задачу. После решения, в оптимальном плане нужно заменить δ нулем.
Рассмотрим метод потенциалов на примере.
Пример 6.1. Решить транспортную задачу, заданную в таблице условий методом потенциалов:
Решение. Найдем сначала опорный план с помощью одного из методов описанного выше. Пусть это будет метод минимального элемента. Тогда после m+n−1 шагов получим следующую таблицу с опорным планом:
Опорный план имеет следующий вид:
При этом плане стоимость перевозок вычисляется так:
Проверяем полученный опорный план на оптимальность. Для этого находим потенциалы пунктов отправления и назначения. Для заполненных клеток составляем систему из 6 уравнений с 7 неизвестными:
Полагая α1=0, находим β2=2, β3=1, α2=-1, α3=-3, β4=0, β2=5
Для каждой свободной клетки вычисляем число αij=βj−αi−cij. α12=2, α14=-2, α22=2, α23=-3, α33=-1, α34=-3.
Полученные числа заключаем в рамки и записываем их в соотвестствующие клетки таблицы:
Среди чисел αij есть положительные. Следовательно данный опорный план не является оптимальным. Наибольшее положительное число 2 находится в пересечении строки A1 и столбца B2. Для данной свободной клетки строим цикл пересчета. Для этого вставим в эту клетку знак «+» а остальные клетки цикла поочередно знаки «−» и «+».
Наименьшее из чисел в минусовых клетках равно 80. Клетка, в которой находится это число становится свободной. В новой таблице другие числа получаются так. Числам, находящимся в плюсовых клетках добавляется 80, а из чисел, находящихся в минусовых клентках вычитается это число.
Опорный план имеет следующий вид:
При этом плане стоимость перевозок вычисляется так:
Проверяем полученный опорный план на оптимальность. Для этого находим потенциалы пунктов отправления и назначения. Для заполненных клеток составляем систему из 6 уравнений с 7 неизвестными:
Полагая α1=0, находим β2=3, β3=1, α3=-3, β1=0, α2=-3, β4=-2
Для каждой свободной клетки вычисляем число αij=βj−αi−cij. α11=-2, α14=-4, α22=2, α23=-1, α33=1, α34=-3.
Полученные числа заключаем в рамки и записываем их в соотвестствующие клетки таблицы:
Полученные числа заключаем в рамки и записываем их в соотвестствующие клетки таблицы:
Среди чисел αij есть положительные. Следовательно данный опорный план не является оптимальным. Наибольшее положительное число 2 находится в пересечении строки A2 и столбца B2. Для данной свободной клетки строим цикл пересчета. Для этого вставим в эту клетку знак «+» а остальные клетки цикла поочередно знаки «−» и «+».
Наименьшее из чисел в минусовых клетках равно 20. Клетка, в которой находится это число становится свободной. В новой таблице другие числа получаются так. Числам, находящимся в плюсовых клетках добавляется 20, а из чисел, находящихся в минусовых клентках вычитается это число.
Опорный план имеет следующий вид:
При этом плане стоимость перевозок вычисляется так:
Проверяем полученный опорный план на оптимальность. Для этого находим потенциалы пунктов отправления и назначения. Для заполненных клеток составляем систему из 6 уравнений с 7 неизвестными:
Полагая α1=0, находим β2=3, β3=1, α2=-1, β1=2, β4=0, α3=-1
Для каждой свободной клетки вычисляем число αij=βj−αi−cij. α11=0, α14=-2, α23=-3, α32=-2, α33=-1, α34=-3.
Среди чисел αij нет положительных. Следовательно данный опорный план является оптимальным.
Ответ. Оптимальный план имеет следующий вид:
При этом плане стоимость перевозок вычисляется так:
7. Метод дифференциальных рент
При нахождении решения транспортной задачи методом дифференциальных рент сначала распределяем часть груза наилучшим образом между пунктами назначения и получаем так называемое условно оптимальное распеделение. На последующих итерациях уменьшаем общий объем нераспределенных поставок. Для решения транспортной задачи методом дифференциальных рент в онлайн режиме с подробными пояснениями пользуйтесь калькулятором метод дифференциальных рент онлайн.
Начальное распределение груза определяется следующим образом. Для каждого столбца определяем минимальный тариф и заключаем в квадрат. Клетки с тарифами в квадратах заполняем максимально возможными числами. В результате получим некоторое распределение поставок груза в пункты назначения. Это распределение в общем случае не удовлетворяет ограничениям транспортной задачи. Далее шаг за шагом нужно постепенно сокращать нераспределенные поставки груза так, чтобы общая стоимисть перевозки оставалась минимальным. Для этого определяем избыточные и недостаточные строки.
Определение 7.1. Строки, соответствующие пунктом отправления, запасы которых полностью распределены а среди пунктов назначения, связанные с этим распределением есть неудовлетворенные потребности называются недостаточными или отрицательными.
Определение 7.2. Строки, запасы которых не распределены полностью называются избыточными или положительными.
После определения недостаточных и избыточных строк, в дополнительном столбце записываем величину избытка или недостатка. Избыток записывается со знаком «+», а недостаток со знаком «-«.
В случае избытка для данной строки в дополнительном столбце записываем разность между запасом груза данного пункта отправления и суммой всех поставок данной строки. Если же данная строка недостаточная, то определяем общий объем поставок, которая недостает для удовлетворения всех потребностей пунктов назначения, связанных с данным распределением груза.
После определения избыточных и недостаточных строк, для каждого столбца находим разности между числом в квадрате и ближащим к нему тарифом, записанным в избыточной строке. Если число в квадрате стоит в избыточной строке, то разность не определяем. Все разности записываем в дополнительной строке. Среди этих разностей находим наимельшее. Это число называется промежуточной рентой. Далее переходим к новой таблице. Эта таблица получается из предыдущей таблицы прибавлением промежуточной ренты к соответствующим тарифам, стоящим в недостаточных строках. Остальные элементы оставляем прежними. Все клетки новой таблицы считем свободными и начинаем их заполнять. В новой таблице число заполненных клеток на одну больше, чем в предыдущей таблице. Эта клетка находится в столбце с промежуточной рентой.
Так как число заполненных клеток больше, чем столбцов, то при заполнении следует соблюдать специальное правило, которое состоит в следующем.
Выбираем некоторый столбец (строку), в котором имеется одна клетка с помещенным в ней квадратом. Эту клетку заполняем и исключаем из рассмотрения данный столбец (строку). После этого берем некоторую строку (столбец), в котором имеется одна клетка с помещенным в ней квадратом. Эту клетку заполняем и исключаем из рассмотрения данную строку (столбец). Продолжая так, после конечного числа шагов заполняем все клетки, в которых помещены квадраты с записанными в них числами.
Если удается распределить весь груз в пунктах отправления между пунктами назначения, то получаем оптимальный план. В противном случае переходим к новой таблице. Для этого находим извыточные и недостаточные строки, прмежуточную ренту и на основе этого строим новую таблицу.
При определении избыточности или недостаточности строк могут возникнуть трудности когда ее нераспределенный остаток равен нулю. Этот вопрос мы рассмотрим ниже на конкретном примере.
После конечного числа итераций распределенный остаток станет равным нулю. В результате получим оптимальный план данной транспортной задачи.
Пример. Найти решение транспортной задачи представленной в таблице условий методом дифференциальных рент:
Решение. Число пунктов отправления m=3, а число пунктов назначения n=4. Следовательно опорный план задачи определяется числами, стоящими в m+n−1=3+4−1=6 заполненых клетках таблицы. Тарифы перевозок единицы груза из каждого пункта отправления во все пункты назначения задаются матрицей
Наличие груза у поставщиков равно: 
Общая потребность в грузе в пунктах назначения равна: 
 . Модель транспортной задачи является закрытой. Следовательно она разрешима.
. Модель транспортной задачи является закрытой. Следовательно она разрешима.
Найдем оптимальный план транспортной задачи методом дифференциальных рент.
Итерация 1:
В каждом из столбцов таблицы находим минимальные тарифы и заключаем в рамки. Если в каком-либо столбце окажется несколько одинаковых минимальных тарифов, то выбираем какой-нибудь из них, причем неважно какой. Заполняем клетки, в которых стоят указанные числа. Сначала находим те столбцы (строки) в которых есть только одна клетка для заполнения. Заполнив ее, исключаем из рассмотрения данный столбец (строку) и переходим к заполнению следующей клетки.
Последовательность заполнения клеток следующее: A1B1, A3B2, A2B3, A2B4.
В результате заполнения отмеченных клеток получен условно оптимальный план.
После получения условно оптимального плана определяем избыточные и недостаточные строки. Строка A1 является недостаточной, поскольку запасы пункта отправления A1 распределены полностью, а потребности пункта назначения B1 удовлетворены частично. При этом величина недостатка равна 20. Строка A3 является недостаточной, поскольку запасы пункта отправления A3 распределены полностью, а потребности пункта назначения B2 удовлетворены частично. При этом величина недостатка равна 20. Строка A2 является избыточным, поскольку запасы пункта отправления A2 распределены не полностью. При этом величина избытка этой строки равна 40.
Нераспределенный остаток равен 40. Суммарный объем поставок равен 150.
После определения избыточных и недостаточных строк, по каждому из столбцов находим разности между минимальными тарифами, записанными в избыточных строках, и тарифами, стоящими в заполненных клетках.
В столбце 1 минимальный тариф в избыточных строках равно 4 а число стоящее в рамке равно 2. Cледовательно, разность для данного столбца равна 4−2=2. В столбце 2 минимальный тариф в избыточных строках равно 3 а число стоящее в рамке равно 2. Cледовательно, разность для данного столбца равна 3−2=1. Для столбца 3 разность не определена, так как число, записанное в рамке в данном столбце находится в положительной строке. Для столбца 4 разность не определена, так как число, записанное в рамке в данном столбце находится в положительной строке.
Избыточные и недостаточные оценки помещаем в дополнительный столбец, а разности в дополнительную строку:
Выбираем наименьшую из найденных разностей, которая является промежуточной рентой. В данном случае промежуточная рента равна 1 и находится в столбце B2. Далее переходим к следующей таблице. В этой таблице в строках (являющихся избыточными) переписываем соответствующие тарифы из предыдущей таблицы, а тарифы недостаточных строках получаются в результате прибавления к ним величину промежуточной ренты, т.е. 1.
Итерация 2:
В каждом из столбцов таблицы находим минимальные тарифы и заключаем в рамки. Заполняем клетки, в которых стоят указанные числа. Сначала находим те столбцы (строки) в которых есть только одна клетка для заполнения. Заполнив ее, исключаем из рассмотрения данный столбец (строку) и переходим к заполнению следующей клетки.
Последовательность заполнения клеток следующее: A1B1, A2B3, A2B4, A2B2, A3B2.
В результате заполнения отмеченных клеток получен условно оптимальный план.
После получения условно оптимального плана определяем избыточные и недостаточные строки. Строка A1 является недостаточной, поскольку запасы пункта отправления A1 распределены полностью, а потребности пункта назначения B1 удовлетворены частично. При этом величина недостатка равна 20. Строка A3 является избыточным, поскольку запасы пункта отправления A3 распределены не полностью. При этом величина избытка этой строки равна 20.
Нераспределенный остаток равен 20. Суммарный объем поставок равен 170.
Избыточные и недостаточные оценки помещаем в дополнительный столбец.
Определяем положительность или отрицательность нулевой строки A2. Для этого запасы этой строки увеличиваем на 1 и снова заполняем таблицу. Если суммарный объем поставок не изменится, то строка положительная, в противном случае − отрицательная.
Последовательность заполнения клеток следующее: A1B1, A2B3, A2B4,A2B2, A3B2:
Суммарный объем поставок не изменился (170). Следовательно строка A2 избыточна (положительна).
После определения избыточных и недостаточных строк, по каждому из столбцов находим разности между минимальными тарифами, записанными в избыточных строках, и тарифами, стоящими в заполненных клетках.
В столбце 1 минимальный тариф в избыточных строках равно 4 а число стоящее в рамке равно 3. Cледовательно, разность для данного столбца равна 4−3=1. Для столбца 2 разность не определена, так как число, записанное в рамке в данном столбце находится в положительной строке. Для столбца 3 разность не определена, так как число, записанное в рамке в данном столбце находится в положительной строке. Для столбца 4 разность не определена, так как число, записанное в рамке в данном столбце находится в положительной строке.
Выбираем наименьшую из найденных разностей, которая является промежуточной рентой. В данном случае промежуточная рента равна 1 и находится в столбце B1. Далее переходим к следующей таблице. В этой таблице в строках (являющихся избыточными) переписываем соответствующие тарифы из предыдущей таблицы, а тарифы недостаточных строках получаются в результате прибавления к ним величину промежуточной ренты, т.е. 1.
Итерация 3:
В каждом из столбцов таблицы находим минимальные тарифы и заключаем в рамки. Заполняем клетки, в которых стоят указанные числа. Сначала находим те столбцы (строки) в которых есть только одна клетка для заполнения. Заполнив ее, исключаем из рассмотрения данный столбец (строку) и переходим к заполнению следующей клетки.
Последовательность заполнения клеток следующее: A2B3, A2B4, A1B1, A2B1, A3B1,A2B2, A3B2.
В результате заполнения отмеченных клеток получен условно оптимальный план. После получения условно оптимального плана определяем избыточные и недостаточные строки.
Посмотрев на таблицу выше мы видим, что избыточных и недостаточных строк нет. Нераспределенный остаток равен 0. Суммарный объем поставок равен 190. Все имеющие запасы распределены в соответствии фактическими потребностями пунктов назначения. Следовательно получен оптимальный план.
Ответ.
Оптимальный план имеет следующий вид:
При этом плане стоимость перевозок вычисляется так: