Черноуцан А.И. Кинематические связи в задачах динамики // Квант. — 1988. — № 2. — С. 57-62.
По специальной договоренности с редколлегией и редакцией журнала «Квант»
В задачах по механике часто встречается ситуация, когда движение тел не является свободным. Ограничения могут создавать твердые поверхности, нерастяжимые нити, жесткие стержни и т. п.
В простейших случаях мы учитываем подобные ограничения автоматически, часто даже не оговаривая их существования. Например, ускорение тела на плоскости мы направляем вдоль плоскости (учитывая наличие твердой поверхности), скорости буксира и баржи считаем одинаковыми (принимая во внимание присутствие нерастяжимого троса) и т. д. Однако иногда возникает необходимость выразить эти ограничения в виде специального уравнения, которое мы будем называть «кинематической связью». Начнем с такой задачи.
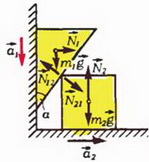
Задача 1. Найдите ускорения призмы массой m1 и куба массой m2, изображенных на рисунке 1, а. Трением пренебречь.
а
б
Рис. 1.
Запишем второй закон Ньютона для каждого тела (в проекции на направление, совпадающее с соответствующим ускорением):
m1·g – N·sin α = m1·a1, (1)
N·cos α = m2·a2. (2)
Мы учли, что по третьему закону Ньютона  т. е. N12 = N21 = N. Написанные два уравнения содержат три неизвестных. Третье уравнение — кинематическая связь между а1 и a2 — должно отразить тот факт, что куб и призма остаются все время в контакте друг с другом. Это можно сделать несколькими способами.
т. е. N12 = N21 = N. Написанные два уравнения содержат три неизвестных. Третье уравнение — кинематическая связь между а1 и a2 — должно отразить тот факт, что куб и призма остаются все время в контакте друг с другом. Это можно сделать несколькими способами.
1) Рассмотрим два близких положения системы, разделенные промежутком времени Δt (рис. 1, б). В треугольнике ABC сторона АВ равна перемещению призмы Δx1, а сторона ВС — перемещению куба Δx2. Имеем
Δx2 = Δx1·tg α.
Разделив обе части равенства на Δt, получаем
υ2 = υ1·tg α.
Так как это соотношение справедливо для произвольного момента времени, из него следует искомое соотношение
a2 = a1·tg α. (3)
Такой подход к получению кинематической связи будем называть прямым методом.
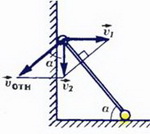
2) Другой способ получения необходимой связи основан на переходе в такую систему отсчета, где условие контакта становится тривиальным. В системе отсчета, связанной с призмой (см. рис. 1, б), скорость куба  направлена вдоль ее поверхности, т. е. под углом α к вертикали. Записывая закон сложения скоростей
направлена вдоль ее поверхности, т. е. под углом α к вертикали. Записывая закон сложения скоростей
![]()
из соответствующего векторного треугольника получаем
υ2 = υ1·tg α и a2 = a1·tg α.
Решаем совместно уравнения (1)-(3) и находим
![]()
В этой задаче второй метод выглядит несколько искусственно. Однако в некоторых случаях именно правильный выбор системы отсчета позволяет существенно упростить проблему кинематических связей. Вот пример.
Задача 2. Клин высотой h с углом наклона α стоит на гладкой горизонтальной плоскости (рис. 2). Масса клина m1. С вершины клина начинает соскальзывать без трения брусок массой m2. Найдите ускорение клина и время соскальзывания бруска.
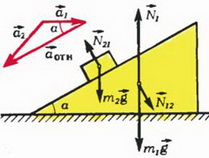
Рис. 2.
Начнем со второго закона Ньютона. Запишем его для клина в проекции на горизонтальное направление, а для бруска пока что в векторной форме:
N·sin α = m1·a1, (4)
 (5)
(5)
Как и раньше,  т. е. N12 = N21 = N. Выбор направления осей для бруска связан с решением вопроса о кинематической связи.
т. е. N12 = N21 = N. Выбор направления осей для бруска связан с решением вопроса о кинематической связи.
Кинематическая связь между ускорениями должна отразить тот факт, что в процессе движения брусок все время остается на поверхности клина. Записать это в виде прямого уравнения оказывается непросто. Вместо этого перейдем в систему отсчета, связанную с клином. В этой системе скорость бруска  и его ускорение
и его ускорение  направлены вдоль клина. Тогда из закона сложения скоростей
направлены вдоль клина. Тогда из закона сложения скоростей  получаем закон сложения ускорений (см. рис. 2)
получаем закон сложения ускорений (см. рис. 2)
 (6)
(6)
Отсюда видно, что от неизвестных a1 и a2 удобнее перейти к неизвестным a1 и aотн, решив тем самым проблему кинематической связи. Подставляя равенство (6) в уравнение (5) и проектируя это уравнение на направления вдоль поверхности клина и перпендикулярно к ней, получаем
m2·g·sin α = m2·(aотн – a1·cos α), (5׳)
N – m2·g·cos α = –m2·a1·sin α. (5״)
Из уравнений (4), (5′) и (5″) находим
![]()
Для ответа на второй вопрос задачи нам не надо искать a1, так как время соскальзывания выражается как раз через aотн:
![]()
Отсюда находим
Как уже говорилось, ограничение на движение может определяться не только прямым контактом рассматриваемых тел, но и наличием в системе соединительных элементов — стержней, нитей и т. п. В большинстве случаев, даже если в условии это не оговорено, соединительные элементы считаются идеальными, т. е. нити — невесомыми и нерастяжимыми, стержни — невесомыми и абсолютно жесткими, для блоков кроме невесомости предполагается также отсутствие трения на оси. (На самом деле слово «невесомый» означает, что масса данного элемента пренебрежимо мала по сравнению с массами других тел системы, слово «нерастяжимый» — что удлинение элемента мало по сравнению с перемещениями тел системы и т. д.) Перед тем, как разбирать конкретные примеры, выясним, что следует из идеальности соединительных элементов. Рассмотрим три частных случая.
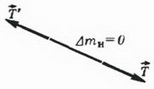
1. Невесомость нити. Напишем второй закон Ньютона для участка нити массой Δmн (рис. 3, а):
T – T´ = Δmн·a.
Так как Δmн = 0, то T – T´, т. е. сила натяжения не меняется вдоль нити.
2. Невесомость подвижного блока и отсутствие трения на его оси. Для раскручивания невесомого блока, в котором нет трения, не нужен вращательный момент. Из этого следует, что натяжение одной и той же нити по обе стороны блока одинаково (рис. 3, б), кроме того
T´ – 2T = 0, т. е. T´ = 2T.
3. Невесомость стержня. Это условие означает, что сумма сил и сумма моментов сил, действующих на стержень, равны нулю. Например, если к стержню приложены две силы, то они равны по модулю, противоположны по направлению и действуют вдоль стержня (рис. 3, в). (В отличие от нити, стержень может быть не только в растянутом, но и в сжатом состоянии.)
а

б
![]()
в
Рис. 3.
Нерастяжимость и жесткость нитей и стержней приводит к появлению кинематических связей, которые мы разберем отдельно в следующих задачах.
Задача 3. Найдите ускорения грузов массой m1 и m2 после перерезания верхней нити (рис. 4). Нити и блок считать идеальными.
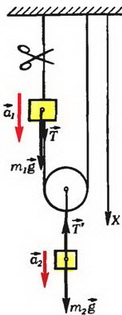
Рис. 4.
Выберем положительное направление оси вертикально вниз и запишем второй закон Ньютона для обоих тел:
T + m1·g = m1·a1, (7)
m2·g – 2T = m2·a2 (8)
(мы учли свойства блока и нити, описанные выше).
Для нахождения кинематической связи между a1 и а2 применим, как мы его назвали, прямой метод. Запишем длину нити в виде
l = x2 + π·R + (x2 – x1),
где х1 — координата груза массой m1, x2 — координата центра блока, R — его радиус, и учтем, что длина нити при движении грузов не изменяется. Тогда для перемещений грузов получим соотношение
2Δx2 – Δx1 = 0,
откуда
2υ2 – υ1 = 0,
2a2 – a1 = 0. (9)
Решая уравнения (7)-(9) совместно, находим
![]()
(Обратите внимание на то, что a1 > g. Подумайте, почему получился такой ответ.)
Задача 4. Невесомый стержень с одинаковыми грузами массой m на концах шарнирно закреплен на оси, которая делит его длину в отношении 2:1 (рис. 5). Стержень удерживают в горизонтальном положении и в некоторый момент освобождают. Найдите ускорения грузов сразу после этого, а также давление стержня на ось в этот момент.
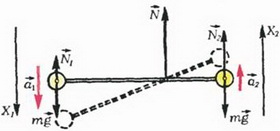
Рис. 5.
Запишем второй закон Ньютона для грузов, выбрав положительные направления осей в сторону соответствующих ускорений:
m·g – N1 = m·a1, (10)
N2 – m·g = m·a2, (11)
где N1 и N2 — силы, действующие на грузы со стороны стержня. Так как сумма моментов сил, действующих на невесомый стержень, равна нулю, то
![]()
где l — длина стержня. Отсюда
N2 = 2N1. (12)
Осталось записать кинематическую связь между a1 и а2. Для этого изобразим на рисунке 5 положение стержня через малый промежуток времени Δt после начала движения. Из подобия получаем
x1 = 2x2,
откуда
υ1 = 2υ2,
a1 = 2a2. (13)
Решая совместно уравнения (10)-(13), находим
![]()
Так как сумма сил, действующих на невесомый стержень, равна нулю, то сила реакции оси (равная по модулю силе давления на ось) равна
![]()
***
Во многих задачах, рассчитанных на применение закона сохранения энергии, требуется найти скорости тел к определенному моменту времени. В этом случае надо установить кинематические связи не между ускорениями, а между скоростями тел. При решении таких задач полезно использовать тот факт, что полная работа, совершаемая любым идеальным соединительным элементом, равна нулю. Физическая причина этого состоит в том, что в таком элементе не может запасаться никакая энергия — ни кинетическая (его масса равна нулю), ни потенциальная (элемент не деформируется).
Последнее утверждение требует пояснения. Может показаться, что даже при малой деформации очень жесткого стержня (или другого элемента) потенциальная анергия его деформации  может быть велика — ведь она пропорциональна жесткости стержня k. Но если учесть, что сила F = k·x, возникающая при деформации, остается конечной при
может быть велика — ведь она пропорциональна жесткости стержня k. Но если учесть, что сила F = k·x, возникающая при деформации, остается конечной при  (она определяется движением тел, закрепленных на стержне), то потенциальная энергия
(она определяется движением тел, закрепленных на стержне), то потенциальная энергия  при больших k оказывается очень малой.
при больших k оказывается очень малой.
Эта и следующая задачи по своему уровню несколько выходят за пределы задач, предлагаемых обычно на вступительных экзаменах в вузы. Однако знакомство с ними для абитуриентов окажется небесполезным.
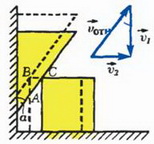
Задача 5. Груз массой М сначала удерживают на уровне блоков, а затем освобождают (рис. 6). Считая нити и блоки идеальными, размеры блоков малыми по сравнению с расстоянием 2l между ними, а массу m грузиков, висящих на концах нитей, известной, найдите скорость груза в тот момент, когда нити составляют угол α с вертикалью. Полученный ответ исследуйте.
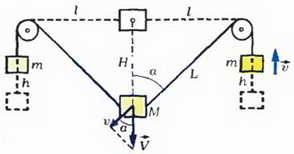
Рис. 6.
К рассматриваемому моменту груз массой М опустился на H = l·ctg α, а грузики массой m поднялись на  каждый. Согласно закону сохранения энергии,
каждый. Согласно закону сохранения энергии,
 (14)
(14)
Для того чтобы найти связь между υ и V, можно, например, применить прямой метод. Из рисунка 6
l2 + H2 = L2.
Дифференцируя по времени (и учитывая, что l´ = 0), находим
2H·H´ = 2L·L´.
Так как L´ = υ, H´ = V, a H/L = cos α, то получаем искомую связь
υ = V·cos α. (15)
Однако проще получить это соотношение из следующих соображений. Раз расстояние L от груза массой М до блока в рассматриваемый момент увеличивается со скоростью υ (с такой скоростью вытягивается нить), то проекция скорости  этого груза на направление нити должна быть равна υ. Учитывая, что скорость направлена вертикально, получаем уравнение (15).
этого груза на направление нити должна быть равна υ. Учитывая, что скорость направлена вертикально, получаем уравнение (15).
Из уравнений (14) и (15) находим
Выясним, будет ли центральный груз все время опускаться (мы считаем нити очень длинными) или при каком-то α он остановится и начнет подниматься. Уравнение V = 0 (условие остановки) преобразуется к виду
![]()
т. е. остановка и обратное движение грузов происходят только при М < 2m. Если М > 2m, то центральный груз будет все время перевешивать и его скорость будет неограниченно возрастать ( при
при  — проверьте это сами). Если же М = 2m, то при опускании центрального груза система все ближе подходит к равновесию, ускорения грузов стремятся к нулю, а их скорости — к предельному значению
— проверьте это сами). Если же М = 2m, то при опускании центрального груза система все ближе подходит к равновесию, ускорения грузов стремятся к нулю, а их скорости — к предельному значению  (убедитесь в этом самостоятельно).
(убедитесь в этом самостоятельно).
Хотелось бы обратить внимание на то, что при использовании закона сохранения энергии сила натяжения нити вообще не вошла в расчеты.
Последний пример иллюстрирует методы получения кинематических связей при движении твердых стержней (или других твердых связей). Напомним, что при движении твердого тела расстояние между любыми двумя его точками не изменяется.
Задача 6. Невесомый стержень длиной l с грузами массой m на концах соскальзывает по сторонам прямого двугранного угла (рис. 7, а). Найдите скорости грузов в тот момент, когда стержень составляет с горизонтом угол α. Трения нет. В начальный момент стержень находился в вертикальном положении.

а
б
Рис. 7.
Из закона сохранения энергии получаем
 (16)
(16)
где y = l·sin α — координата второго груза в рассматриваемый момент. Для получения кинематической связи можно применить прямой метод, как это было сделано в предыдущей задаче (проделайте это сами). Быстрее же и нагляднее кинематическая связь получается из таких соображений. Раз расстояние между грузами остается неизменным, то в каждый момент скорость, с которой первый груз «удаляется» от второго, равна скорости, с которой второй груз «приближается» к первому. Иначе говоря, проекции скоростей грузов на стержень в любой момент времени одинаковы (см. рис. 7, a):
υ1·cos α = υ2·sin α. (17)
Подставляя (17) в (16), находим
![]()
В кинематике твердого тела часто используется «разложение» сложного движения на поступательное и вращательное. Чтобы продемонстрировать этот метод, применим его для получения кинематической связи (17). В системе отсчета, связанной с первым грузом, стержень совершает чисто вращательное движение. Значит, в этой системе скорость второго груза  направлена перпендикулярно стержню. Применяя закон сложения скоростей
направлена перпендикулярно стержню. Применяя закон сложения скоростей  (см. рис. 7, б), получаем соотношение (17).
(см. рис. 7, б), получаем соотношение (17).
Может показаться, что найденные выражения для скоростей дают полное решение задачи. Однако в этой задаче содержится поучительный подвох, разбором которого мы и закончим статью.
Решение было бы полным, если бы второй груз не мог оторваться от вертикальной стены. (Для этого можно было бы, например, посадить грузы на гладкие штанги, а стержень присоединить к ним шарнирно). Однако в нашем варианте задачи (см. рис. 7, а) при некотором угле произойдет отрыв второго груза от вертикальной стены, после чего найденный ответ будет неприменим. Дело в том, что горизонтальный импульс системы определяется только движением первого груза, скорость которого, в соответствии с выражением для υ1, до некоторого угла возрастает, а потом начинает убывать. Это означает, что в какой-то момент должна изменить направление внешняя горизонтальная сила, действующая на систему. Но есть только одна горизонтальная сила — сила реакции вертикальной стенки, которая не может изменить свое направление. Таким образом, в тот момент, когда реакция стенки обращается в нуль, происходит отрыв второго груза от стенки. Дифференцируя выражение для υ1 по времени, находим, что υ1 максимальна при sin α = 2/3. При угле  и происходит отрыв стержня от вертикальной стенки.
и происходит отрыв стержня от вертикальной стенки.
Упражнения
1. Найдите ускорения стержня и клина, изображенных на рисунке 8. Трения нет.
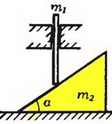
Рис. 8.
2. Найдите натяжение нити в системе, изображенной на рисунке 9.
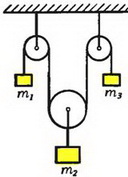
Рис. 9.
3. (для любителей каверз и ловушек). Чему равны ускорения грузов в системе, изображенной на рисунке 10?
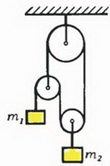
Рис. 10.
4. Найдите ускорение клина на рисунке 11. Трения нет. Указание. Примените метод, использованный при решении задачи 2 в статье.
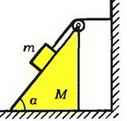
Рис. 11.
Ответы
1. 
2. 
3. a1 = a2 = g.
4. 
Черноуцан А.И. Кинематические связи в задачах динамики // Квант
Черноуцан А.И. Кинематические связи в задачах динамики // Квант. — 1988. — № 2. — С. 57-62.
По специальной договоренности с редколлегией и редакцией журнала «Квант»
В задачах по механике часто встречается ситуация, когда движение тел не является свободным. Ограничения могут создавать твердые поверхности, нерастяжимые нити, жесткие стержни и т. п.
В простейших случаях мы учитываем подобные ограничения автоматически, часто даже не оговаривая их существования. Например, ускорение тела на плоскости мы направляем вдоль плоскости (учитывая наличие твердой поверхности), скорости буксира и баржи считаем одинаковыми (принимая во внимание присутствие нерастяжимого троса) и т. д. Однако иногда возникает необходимость выразить эти ограничения в виде специального уравнения, которое мы будем называть «кинематической связью». Начнем с такой задачи.
Задача 1. Найдите ускорения призмы массой m1 и куба массой m2, изображенных на рисунке 1, а. Трением пренебречь.
Запишем второй закон Ньютона для каждого тела (в проекции на направление, совпадающее с соответствующим ускорением):
Мы учли, что по третьему закону Ньютона т. е. N12 = N21 = N. Написанные два уравнения содержат три неизвестных. Третье уравнение — кинематическая связь между а1 и a2 — должно отразить тот факт, что куб и призма остаются все время в контакте друг с другом. Это можно сделать несколькими способами.
1) Рассмотрим два близких положения системы, разделенные промежутком времени Δt (рис. 1, б). В треугольнике ABC сторона АВ равна перемещению призмы Δx1, а сторона ВС — перемещению куба Δx2. Имеем
Разделив обе части равенства на Δt, получаем
Так как это соотношение справедливо для произвольного момента времени, из него следует искомое соотношение
Такой подход к получению кинематической связи будем называть прямым методом.
2) Другой способ получения необходимой связи основан на переходе в такую систему отсчета, где условие контакта становится тривиальным. В системе отсчета, связанной с призмой (см. рис. 1, б), скорость куба направлена вдоль ее поверхности, т. е. под углом α к вертикали. Записывая закон сложения скоростей
из соответствующего векторного треугольника получаем
Решаем совместно уравнения (1)-(3) и находим
В этой задаче второй метод выглядит несколько искусственно. Однако в некоторых случаях именно правильный выбор системы отсчета позволяет существенно упростить проблему кинематических связей. Вот пример.
Задача 2. Клин высотой h с углом наклона α стоит на гладкой горизонтальной плоскости (рис. 2). Масса клина m1. С вершины клина начинает соскальзывать без трения брусок массой m2. Найдите ускорение клина и время соскальзывания бруска.
Начнем со второго закона Ньютона. Запишем его для клина в проекции на горизонтальное направление, а для бруска пока что в векторной форме:
(5)
Как и раньше, т. е. N12 = N21 = N. Выбор направления осей для бруска связан с решением вопроса о кинематической связи.
Кинематическая связь между ускорениями должна отразить тот факт, что в процессе движения брусок все время остается на поверхности клина. Записать это в виде прямого уравнения оказывается непросто. Вместо этого перейдем в систему отсчета, связанную с клином. В этой системе скорость бруска и его ускорение направлены вдоль клина. Тогда из закона сложения скоростей получаем закон сложения ускорений (см. рис. 2)
(6)
Отсюда видно, что от неизвестных a1 и a2 удобнее перейти к неизвестным a1 и aотн, решив тем самым проблему кинематической связи. Подставляя равенство (6) в уравнение (5) и проектируя это уравнение на направления вдоль поверхности клина и перпендикулярно к ней, получаем
Из уравнений (4), (5′) и (5″) находим
Для ответа на второй вопрос задачи нам не надо искать a1, так как время соскальзывания выражается как раз через aотн:
Как уже говорилось, ограничение на движение может определяться не только прямым контактом рассматриваемых тел, но и наличием в системе соединительных элементов — стержней, нитей и т. п. В большинстве случаев, даже если в условии это не оговорено, соединительные элементы считаются идеальными, т. е. нити — невесомыми и нерастяжимыми, стержни — невесомыми и абсолютно жесткими, для блоков кроме невесомости предполагается также отсутствие трения на оси. (На самом деле слово «невесомый» означает, что масса данного элемента пренебрежимо мала по сравнению с массами других тел системы, слово «нерастяжимый» — что удлинение элемента мало по сравнению с перемещениями тел системы и т. д.) Перед тем, как разбирать конкретные примеры, выясним, что следует из идеальности соединительных элементов. Рассмотрим три частных случая.
1. Невесомость нити. Напишем второй закон Ньютона для участка нити массой Δmн (рис. 3, а):
Так как Δmн = 0, то T – T´, т. е. сила натяжения не меняется вдоль нити.
2. Невесомость подвижного блока и отсутствие трения на его оси. Для раскручивания невесомого блока, в котором нет трения, не нужен вращательный момент. Из этого следует, что натяжение одной и той же нити по обе стороны блока одинаково (рис. 3, б), кроме того
3. Невесомость стержня. Это условие означает, что сумма сил и сумма моментов сил, действующих на стержень, равны нулю. Например, если к стержню приложены две силы, то они равны по модулю, противоположны по направлению и действуют вдоль стержня (рис. 3, в). (В отличие от нити, стержень может быть не только в растянутом, но и в сжатом состоянии.)
Нерастяжимость и жесткость нитей и стержней приводит к появлению кинематических связей, которые мы разберем отдельно в следующих задачах.
Задача 3. Найдите ускорения грузов массой m1 и m2 после перерезания верхней нити (рис. 4). Нити и блок считать идеальными.
Выберем положительное направление оси вертикально вниз и запишем второй закон Ньютона для обоих тел:
(мы учли свойства блока и нити, описанные выше).
Для нахождения кинематической связи между a1 и а2 применим, как мы его назвали, прямой метод. Запишем длину нити в виде
где х1 — координата груза массой m1, x2 — координата центра блока, R — его радиус, и учтем, что длина нити при движении грузов не изменяется. Тогда для перемещений грузов получим соотношение
Решая уравнения (7)-(9) совместно, находим
(Обратите внимание на то, что a1 > g. Подумайте, почему получился такой ответ.)
Задача 4. Невесомый стержень с одинаковыми грузами массой m на концах шарнирно закреплен на оси, которая делит его длину в отношении 2:1 (рис. 5). Стержень удерживают в горизонтальном положении и в некоторый момент освобождают. Найдите ускорения грузов сразу после этого, а также давление стержня на ось в этот момент.
Запишем второй закон Ньютона для грузов, выбрав положительные направления осей в сторону соответствующих ускорений:
где N1 и N2 — силы, действующие на грузы со стороны стержня. Так как сумма моментов сил, действующих на невесомый стержень, равна нулю, то
где l — длина стержня. Отсюда
Осталось записать кинематическую связь между a1 и а2. Для этого изобразим на рисунке 5 положение стержня через малый промежуток времени Δt после начала движения. Из подобия получаем
Решая совместно уравнения (10)-(13), находим
Так как сумма сил, действующих на невесомый стержень, равна нулю, то сила реакции оси (равная по модулю силе давления на ось) равна
Во многих задачах, рассчитанных на применение закона сохранения энергии, требуется найти скорости тел к определенному моменту времени. В этом случае надо установить кинематические связи не между ускорениями, а между скоростями тел. При решении таких задач полезно использовать тот факт, что полная работа, совершаемая любым идеальным соединительным элементом, равна нулю. Физическая причина этого состоит в том, что в таком элементе не может запасаться никакая энергия — ни кинетическая (его масса равна нулю), ни потенциальная (элемент не деформируется).
Последнее утверждение требует пояснения. Может показаться, что даже при малой деформации очень жесткого стержня (или другого элемента) потенциальная анергия его деформации может быть велика — ведь она пропорциональна жесткости стержня k. Но если учесть, что сила F = k·x, возникающая при деформации, остается конечной при (она определяется движением тел, закрепленных на стержне), то потенциальная энергия при больших k оказывается очень малой.
Эта и следующая задачи по своему уровню несколько выходят за пределы задач, предлагаемых обычно на вступительных экзаменах в вузы. Однако знакомство с ними для абитуриентов окажется небесполезным.
Задача 5. Груз массой М сначала удерживают на уровне блоков, а затем освобождают (рис. 6). Считая нити и блоки идеальными, размеры блоков малыми по сравнению с расстоянием 2l между ними, а массу m грузиков, висящих на концах нитей, известной, найдите скорость груза в тот момент, когда нити составляют угол α с вертикалью. Полученный ответ исследуйте.
К рассматриваемому моменту груз массой М опустился на H = l·ctg α, а грузики массой m поднялись на каждый. Согласно закону сохранения энергии,
(14)
Для того чтобы найти связь между υ и V, можно, например, применить прямой метод. Из рисунка 6
Дифференцируя по времени (и учитывая, что l´ = 0), находим
Так как L´ = υ, H´ = V, a H/L = cos α, то получаем искомую связь
Однако проще получить это соотношение из следующих соображений. Раз расстояние L от груза массой М до блока в рассматриваемый момент увеличивается со скоростью υ (с такой скоростью вытягивается нить), то проекция скорости этого груза на направление нити должна быть равна υ. Учитывая, что скорость направлена вертикально, получаем уравнение (15).
Из уравнений (14) и (15) находим
Выясним, будет ли центральный груз все время опускаться (мы считаем нити очень длинными) или при каком-то α он остановится и начнет подниматься. Уравнение V = 0 (условие остановки) преобразуется к виду
т. е. остановка и обратное движение грузов происходят только при М 2m, то центральный груз будет все время перевешивать и его скорость будет неограниченно возрастать ( при — проверьте это сами). Если же М = 2m, то при опускании центрального груза система все ближе подходит к равновесию, ускорения грузов стремятся к нулю, а их скорости — к предельному значению (убедитесь в этом самостоятельно).
Хотелось бы обратить внимание на то, что при использовании закона сохранения энергии сила натяжения нити вообще не вошла в расчеты.
Последний пример иллюстрирует методы получения кинематических связей при движении твердых стержней (или других твердых связей). Напомним, что при движении твердого тела расстояние между любыми двумя его точками не изменяется.
Задача 6. Невесомый стержень длиной l с грузами массой m на концах соскальзывает по сторонам прямого двугранного угла (рис. 7, а). Найдите скорости грузов в тот момент, когда стержень составляет с горизонтом угол α. Трения нет. В начальный момент стержень находился в вертикальном положении.
Из закона сохранения энергии получаем
(16)
где y = l·sin α — координата второго груза в рассматриваемый момент. Для получения кинематической связи можно применить прямой метод, как это было сделано в предыдущей задаче (проделайте это сами). Быстрее же и нагляднее кинематическая связь получается из таких соображений. Раз расстояние между грузами остается неизменным, то в каждый момент скорость, с которой первый груз «удаляется» от второго, равна скорости, с которой второй груз «приближается» к первому. Иначе говоря, проекции скоростей грузов на стержень в любой момент времени одинаковы (см. рис. 7, a):
Подставляя (17) в (16), находим
В кинематике твердого тела часто используется «разложение» сложного движения на поступательное и вращательное. Чтобы продемонстрировать этот метод, применим его для получения кинематической связи (17). В системе отсчета, связанной с первым грузом, стержень совершает чисто вращательное движение. Значит, в этой системе скорость второго груза направлена перпендикулярно стержню. Применяя закон сложения скоростей (см. рис. 7, б), получаем соотношение (17).
Может показаться, что найденные выражения для скоростей дают полное решение задачи. Однако в этой задаче содержится поучительный подвох, разбором которого мы и закончим статью.
Решение было бы полным, если бы второй груз не мог оторваться от вертикальной стены. (Для этого можно было бы, например, посадить грузы на гладкие штанги, а стержень присоединить к ним шарнирно). Однако в нашем варианте задачи (см. рис. 7, а) при некотором угле произойдет отрыв второго груза от вертикальной стены, после чего найденный ответ будет неприменим. Дело в том, что горизонтальный импульс системы определяется только движением первого груза, скорость которого, в соответствии с выражением для υ1, до некоторого угла возрастает, а потом начинает убывать. Это означает, что в какой-то момент должна изменить направление внешняя горизонтальная сила, действующая на систему. Но есть только одна горизонтальная сила — сила реакции вертикальной стенки, которая не может изменить свое направление. Таким образом, в тот момент, когда реакция стенки обращается в нуль, происходит отрыв второго груза от стенки. Дифференцируя выражение для υ1 по времени, находим, что υ1 максимальна при sin α = 2/3. При угле и происходит отрыв стержня от вертикальной стенки.
1. Найдите ускорения стержня и клина, изображенных на рисунке 8. Трения нет.
2. Найдите натяжение нити в системе, изображенной на рисунке 9.
3. (для любителей каверз и ловушек). Чему равны ускорения грузов в системе, изображенной на рисунке 10?
4. Найдите ускорение клина на рисунке 11. Трения нет. Указание. Примените метод, использованный при решении задачи 2 в статье.
1.
2.
4.
Приемы решения задач с использованием кинематических связей

МУНИЦИПАЛЬНОЕ БЮДЖЕТНОЕ ОБЩЕОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ГОРОДА КЕРЧИ РЕСПУБЛИКИ КРЫМ «ШКОЛА-ГИМНАЗИЯ №1»
Приемы решения задач с использованием кинематических связей
Подборка задач с примерами решений
Приемы решения задач с использованием кинематических связей
Кинематическими связями называют определенные ограничения свободы передвижения тела или системы тел.
Рассматривая задачи, где такие связи есть, будем придерживаться следующих идей:
Известно из определения, что у твердого тела расстояние между любыми двумя его точками сохраняется в случае движения этого тела (жесткий стержень, натянутая нить А это значит, что с какой скоростью первая точка при движении тела удаляется от второй, с такой же скоростью вторая точка приближается к первой. Следовательно, проекции этих скоростей на линию, соединяющую данные точки, должны быть одинаковыми. Иначе твердое тело деформировалось бы.
Пусть таким твердым телом будет жесткий стержень или натянутая нить. Тогда


использование мгновенного центра вращения.
Что подразумевает переход в такую систему отсчета, в которой есть неподвижная в данный момент времени точка, относительно которой все остальные точки твердого тела движутся. Тогда проектируя скорость точки С и точки В на прямую СВ получаем уравнение вида:

то есть при движении твердого тела скорости всех его точек направлены перпендикулярно прямым, которые соединяют точки с мгновенным центром вращения. Фактически тело проворачивается возле мгновенного центра.
Местоположение мгновенного центра вращения можно находить двумя способами:

если известны скорости двух точек твердого тела и эти скорости не параллельны, то мгновенный центр вращения лежит на пересечении перпендикуляров, проведенным к этим скоростям. Точка С — неподвижна, она является центром вращения, ВС и АС – радиусы окружностей, по которым
вращаются соответственно точки А и В. Скорости х1 и х2 перпендикулярны радиусам.
Так как тело проворачивается возле мгновенного центра, то это означает, что у всех его точек одинаковая угловая скорость. А так как линейная скорость связана с угловой соотношением

то следует пропорция: во сколько раз больше расстояние между данной точкой и мгновенным центром, во столько раз больше ее линейная скорость. Поэтому в случае параллельных скоростей мгновенный центр вращения можно находить через пропорцию скоростей и расстояний.
Если одно тело катится по поверхности другого без проскальзывания, то в точках их соприкосновения и них одинаковая линейная скорость и по величине и по направлению.




Если при движении одного тела по поверхности другого есть проскальзывание, то проекции скоростей соприкасающихся точек на перпендикуляр, восстановленный к этим двум поверхностям, должны быть одинаковы: по оси Y тела должны двигаться только совместно, иначе будет наблюдаться отрыв одного тела от другого.

Стержень длиной L шарнирно соединён с муфтами А и В, которые перемещаются по двум взаимно перпендикулярным рейкам. Муфта А движется с постоянной скоростью х1. Найдите зависимость скорости муфты В от угла б.
Использование первой идеи для решения данной задачи: проекции скоростей точек А и В на линию АВ должны быть одинаковыми.

Понятно, что точка В скользит вниз, в то время как точка А движется в горизонтальном направлении. Обозначенные на чертеже углы равны как углы, образованные взаимно перпендикулярными сторонами.



Применение второй идеи для решения данной задачи: использование мгновенного центра вращения.
Представим, что палочка – это элемент, видимая линия, проведенная на большом твердом прозрачном теле. Так как известны скорости двух точек твердого тела, точек А и В, и эти скорости не параллельны, то мгновенный центр вращения лежит на пересечении перпендикуляров, проведенным к этим скоростям. Точка С — мгновенный центр вращения, вокруг которой точка А вращается по окружности радиуса СА, а точка
В вращается по окружности, радиусом ВС. Угловые скорости этих точек равны. Поэтому можно записать:

Еще один способ решения данной задачи: переход в другую систему отсчета.
Перейдем в систему отсчета, которая движется вправо со скоростью V0. (Для перехода от скорости каждой точки надо отнять скорость V0)

Тогда точка А неподвижна, а стенка, и вместе с ней точка В, движется влево со скоростью V0. А так как длина палочки ℓ постоянна, то точка В движется по окружности с линейной скоростью u, которая перпендикулярна радиусу окружности ℓ. Из треугольника скоростей следует:


Палочка АВ длины ℓ движется в плоскости чертежа так, что в данный момент времени скорость её конца А направлена под углом б, а скорость конца В — под углом в к палочке. Величина скорости конца А равна х. Определить величину скорости u конца В. Начертить распределение скоростей вдоль палочки.

На основании первой идеи можно утверждать, что проекции скоростей точек А и В на линию АВ одинаковы. А значит, можно записать: 

Скорость точки А и точки В можно разложить на составляющие вдоль палочки и перпендикулярно ей. Тогда движение палочки можно представить как два движения: каждая точка палочки движется поступательно со скоростью u∙Cos в и палочка совершает вращательное движение вокруг точки С. Скорости, перпендикулярные палочке –это линейные скорости. Их величина уменьшается при приближении к точке С. И у точки С только скорость поступательного движения.
Второй способ решения состоит в том, что движение полочки можно рассмотреть только как вращательное движение возле мгновенного центра вращения. Для нахождения мгновенного центра вращения точки С проведем перпендикуляры в точку А к скорости u и в точку В к скорости х. Все точки палочки имеют одинаковую угловую скорость, но линейные скорости у них разные. Чем меньше радиус окружности, по которым они двигаются возле точки С, тем меньше их линейная скорость. То есть для любой точке выполняется х

Лодку подтягивают к крутому берегу высотой h = 3 м с помощью верёвки, выбирая её со скоростью 60 см/с. С какой скоростью двигалась лодка в тот момент, когда верёвка составляла с горизонтом угол 600? Найти также ускорение лодки в этот момент.

На основании первой идеи проекции скорости х и скорости х0 на нерастяжимую веревку должны быть одинаковыми.

Рабочие поднимают груз с помощью двух канатов, за концы которых они тянут с одинаковыми скоростями х. Какую скорость u имеет груз в тот момент, когда угол между канатами, к которым он прикреплён, равен 2б

На основании первой идеи можно утверждать, что проекции скоростей точек А и В на линию АВ одинаковы. Но точка В движется со скоростью х, так как с этой скоростью движется конец каната. Значит, и точка А движется с этой же скоростью. Аналогично для второго каната: точка А движется вдоль него со скоростью х.
Казалось бы, что результирующую скорость точки А можно найти, складывая два вектора х по правилу параллелограмма…
Но этого делать нельзя! Так как в этом случае, если бы б был равен нулю (б=0), тот канаты были бы параллельны, и груз бы двигался со скоростью 2х. А последнее, при наличии неподвижных блоков, невозможно.
Скорость U такова, что скорости х являются ее проекциями на канаты. С учетом этого, можно записать:

Тяжёлый ящик перемещают с помощью двух тракторов, движущихся со скоростями х1 и х2, составляющими угол б. Как направлена и чему равна скорость ящика в тот момент, когда канаты параллельны векторам х1 и х2?

Понятно, что точка А имеет скорость х1 вдоль первого каната и скорость х2 направленную вдоль второго каната. Но, так же, как и в предыдущей задаче, находить результирующую скорость ящика, складывая выше упомянутые скорости по правилу параллелограмма нельзя. В этом случае, если угол б=0, то ящик должен двигаться со скоростью х1+ х1, а это противоречить здравому смыслу.
Следовательно, у результирующей скорости проекции на канаты должны быть равны х1и х2. Проводим перпендикуляры из концов этих векторов и в их пересечение утыкается конец результирующей скорости х, с которой движется ящик. Теперь, зная х1 и х, а так же угол между ними надо найти скорость х. Это геометрическая задача


Точки А, D, С и В лежат на одной окружности и в этой окружности результирующая скорость х – диаметр. Эта окружность описана возле треугольника АВD, в котором известны две стороны х1 и х2, и угол между ними. Тогда по теореме косинусов можно определить сторону ВD:

Известно, что диаметр описанной окружности равен:

Колечки О и О’ надеты на вертикально закреплённые стержни АВ и А’В’. Нерастяжимая нить привязана к кольцу О, пропущена через кольцо О’ и закреплена в точке А’. В тот момент, когда угол AOO’ = б, кольцо О’ движется вниз со скоростью х. Найти скорость u0 кольца О в этот момент.

Так как в колечке О’ нитка преломляется, то использовать первую идею о том, что проекции скорости точки О’ и скорости точки О (проекции скоростей х и u) на нить О’О равны, нельзя.
Используем следующий способ решения: переход в другую систему отсчета.

Перейдем в СО, которая движется со скоростью х вниз ( то есть, от каждой скорости вычитаем скорость х). В такой системе отсчета колечко О’ останавливается, оно неподвижно, а со скоростью х в точке А’ вытягиваем веревку. Тогда веревка в точке О так же движется со скоростью х.

Теперь надо перейти в СО, связанную с землей (надо ко всем скоростям теперь прибавить скорость х, направленную вниз)


Один конец шарнирной конструкции из двух одинаковых звеньев длины 2ℓ закреплён, а другой движется с постоянной скоростью х по прямой, расстояние до которой от неподвижного конца конструкции равно 3ℓ. Найдите ускорение шарнира в тот момент, когда: 1) левое звено горизонтально, 2) скорость шарнира равна нулю.

1). Так как левый конец звена конструкции закреплен в точке О, то шарнир А будет двигаться по окружности радиуса R=2ℓ и в любой момент времени вектор его скорости будет перпендикулярен ОА. В интересующий нас момент времени, когда левое звено ОА горизонтально, скорость шарнира А направлена вверх. И конец правого звена, точка 2, также имеет вертикально направленную скорость х0

На основании первой идеи, из-за не растяжимости правого звена, можно утверждать, что проекции скоростей х и х0 на правое звено (то есть вдоль оси у), равны.


Но это равенство скоростей имеет место только для данного момента времени.
Центростремительное ускорение шарнира А может быть определено по формуле:

И направлено это ускорение вдоль левого звена, то есть по оси х. Но так как скорость шарнира А меняется по величине, а не только по направлению, есть и тангенциальное (касательное) ускорение. Согласно условию, надо найти полное ускорение шарнира А.
Используем переход в другую систему отсчета, которая движется вверх со скоростью х вместе с правым концом правого звена (от каждой скорости надо вычитать х, направленную вверх). Тогда, в этой системе отсчета, точка О движется вниз со скоростью х, а шарнир А неподвижен. Поэтому вектор его ускорения может быть лишь перпендикулярен правому звену.

Вектор полного ускорения шарнира будет точно таким же и в неподвижной системе отсчета. Проекция вектора полного ускорения шарнира на направление левого звена 
 (на ось х) представляет собой центростремительное ускорение, и равна:
(на ось х) представляет собой центростремительное ускорение, и равна:

Значит, вектор полного ускорения шарнира в момент времени, когда левое звено горизонтально, будет равен:
2). В момент времени, когда скорость шарнира А равна нулю, правое звено будет горизонтально. А вектор ускорения шарнира будет перпендикулярен неподвижному левому звену (рис. б).

Составляющая ускорения шарнира на правое звено будет равна


Два стержня длины L соединены шарнирно. Свободный конец одного из стержней шарнирно прикреплён к стене, а свободный конец другого стержня двигают перпендикулярно стене с постоянной по величине скоростью х0. Найти величину и направление вектора ускорения шарнира, соединяющего стержни, в момент, когда угол между стержнями равен 2а.

У левой палочки ее правый конец движется со скоростью х, которая перпендикулярно этой палочке. У правой палочки по условию скорость х0 направлена горизонтально.
На основании первой идеи, из-за не растяжимости стороны АВ, можно утверждать, что проекции скоростей х и х0 на АВ равны.



Тогда 
Определяем проекции ускорения на координатные оси. На ось х:


Чтобы найти проекцию ускорения на вторую ось, перейдем в СО, которая движется вправо со скоростью х0.Тогда точка В неподвижна, а стенка движется влево со скоростью х0. И для точки А составляем треугольник скоростей. И в этой системе вектор ускорения шарнира будет перпендикулярен неподвижному левому звену


На неподвижном клине, образующем угол б с горизонтом, лежит груз, прикреплённый к стене перекинутой через закреплённый на клине блок нерастяжимой нитью. В некоторый момент времени клин начинает двигаться вправо с постоянной скоростью х. С какой скоростью движется груз, пока он находится на клине?

Предположим, что клин движется вправо со скоростью х. При этом надо понимать, что расстояние между точками А и В все время меняется, несмотря на то, что веревка нерастяжима. Меняется потому, что есть перегиб на блоке. Перейдем в систему отсчета, которая движется вправо со скоростью х. В этой системе клин неподвижен, а стенка уходит вправо со скоростью х. Тогда очевидно, что по неподвижному клину груз может двигаться только вдоль наклонной плоскости, то есть вдоль веревки со скоростью х. Скорость груза относительно земли, согласно классическому закону сложения скоростей равна:
В этом треугольнике скоростей ( см. рис.)
Определим результирующую скорость по теореме косинусов:
Нитку тянут со скоростью х0. Найдите угловую скорость катушки и скорость её центра. Катушка по столу и нитка по катушке не проскальзывают. Внутренний радиус катушки r, внешний — R.

На основании второй идеи, используя понятие мгновенного центра вращения, можно утверждать, что результирующая скорость точки А равно 0, то есть точка А — это мгновенный центр вращения. Следовательно, все остальные точки катушки проворачиваются возле точки А с одинаковой угловой скоростью, но линейная скорость у них разная, так как разный радиус вращения. Угловая скорость точки С равна:

Угловая скорость точки O равна:



Точка А, лежащая на пересечении рельса с внешним ободом колеса поезда, движется в данный момент времени со скоростью и =5,0 м/с (см. рис). Определить, с какой скоростью и в каком направлении движется поезд, если r = 50 см, R = 56 см.

Скорость реборды u, заданная по условию, является результирующей скоростью двух скоростей: скорости поступательного движения хпоступ и линейной скорости хкасат вращательного движения вокруг точки О. Так как точка А лежит на ободе реборды, эти две скорости численно равны.
Используя вторую идею, можно считать точку С мгновенным центром вращения. Тогда скорость u будет линейной скорость точки А, вращающейся вокруг тоски С, а скорость поступательного движения так же будет линейной скоростью для точки О вращающейся вокруг точки С. И у точки А, и у точки О в этом случае будет одна и та же угловая скорость.
Следовательно, можно записать:

Кривошип ОА, вращаясь с угловой скоростью щ, приводит в движение колесо радиуса r, катящееся по неподвижному колесу радиуса R = 3r. Найдите скорость точки В.

Точка С принадлежит всем трем телам: колесу радиусом R, колесу радиусом r, и кривошипу ОА. И скорость точки А такая же, как у кривошипа, вращающегося относительно точки О с угловой скоростью щ. То есть его точка А движется с линейной скоростью, равной:

На основании второй идеи, можно считать точку С мгновенным центром вращения для колеса радиусом r. Тогда точки А и В проворачиваются относительно точки С с одинаковой угловой скоростью:


Тяжёлый диск радиуса R скатывается на двух не растяжимых нитях, намотанных на него. Свободные концы нитей закреплены. Нити при движении диска постоянно натянуты. В некоторый момент угловая скорость диска равна щ, а угол между нитями б. Какова в этот момент скорость центра диска?
Нить касается диска в точке А. Тогда, согласно третьей идеи, если одно тело катится по поверхности другого без проскальзывания, то в точках их соприкосновения и них одинаковая линейная скорость и по величине и по направлению. Величина этой скорости


Нить АА1 натянута, это значит, на основании первой идеи, что проекции скоростей точек А и А1 на нить должны быть равными. Но точка А1 неподвижна и нет у нее проекции на нить, значит не должно быть проекции и скорости в точке А. А это возможно только в том случае, если хА перпендикулярна нити.
Аналогично и для второй нити, то есть хВ перпендикулярно нити ВВ1
Значит, скорости хА и хВ направлены по радиусу диска. И после этого про нити можно забыть есть диск, две точки на нем А и В, и скорости в этих точках имеют радиальные направления.
Согласно второй идее о мгновенном центре вращения, если скорости двух точек твердого тела и эти скорости не параллельны, а образуют некоторый угол б, то мгновенный центр вращения лежит на пересечении перпендикуляров, проведенным к этим скоростям. Точка С — неподвижна, она является центром вращения, ВС и АС – радиусы окружностей, по которым вращаются соответственно точки А и В. Скорости хА и хВ перпендикулярны радиусам. В четырехугольнике угол ОАВ равен углу между нитями б как углы, образованные взаимно перпендикулярными сторонами. В этот момент скорость центра диска, то есть скорость точки О равна:


Цилиндр с намотанной на него нитью, второй конец которой закреплён, находится на горизонтальной подставке, движущейся поступательно с постоянной горизонтальной скоростью V. Найти скорость оси цилиндра в зависимости от угла б, образуемого нитью с вертикалью. Относительно подставки цилиндр не проскальзывает.
Точка С – точка соприкосновения цилиндра с подставкой. Третья идея заключается в том, что если одно тело катится по поверхности другого без проскальзывания, то в точках их соприкосновения и них одинаковая линейная скорость и по величине, и по направлению. Раз подставка движется со скоростью V. то и у точки С такая же скорость. И про доску можно забыть. То есть рассматриваем цилиндр с намотанной на него нитью. Нить касается цилиндра в точке А. В этой точке, так же как в точке С качение без проскальзывания, а это снова означает, что скорость этой точки нити равно скорости

этой точки диска. Нить не растяжима, на основании первой идеи, проекции скоростей точек А и В на нить должны быть равными. Но точка В неподвижна и нет у нее проекции на нить, значит не должно быть проекции и скорости в точке А. Это возможно только в том случае, если хА перпендикулярна нити.
Определим положение мгновенного центра вращения: он лежит на пересечении перпендикуляров ОС и ОА, проведенным к скоростям хА и хС. Мгновенным центром вращения является точка О. Ось цилиндра описывает вокруг мгновенного центра вращения окружность радиусом R1

У оси цилиндра и точки С одинаковые угловые скорости щ относительно мгновенного центра вращения.
Но точка С описывает вокруг точки О окружность радиусом (R1 +R)


Задачи для самостоятельного решения
Концы А и В стержня АВ скользят по сторонам прямого угла. Как зависит от угла б скорость х и ускорение а середины стержня, если конец В движется с постоянной скоростью. Длина стержня равна L. Нерастяжимая нить длины L соединяет две бусинки А и В. Бусинку В передвигают с постоянной скоростью х0 по прямой спице МО. В результате этого бусинка А движется по спице CD, изогнутой в виде дуги окружности радиуса 
 Найти ускорение бусинки А в тот момент, когда бусинка В будет на расстоянии L от точки О. Два стержня длины L соединены шарнирно. Свободный конец одного из стержней шарнирно закреплён на вертикальной стене, а свободный конец другого стержня двигают с постоянной по величине вертикальной скоростью х0. Найти величину и направление вектора ускорения шарнира, соединяющего стержни, в момент, когда их концы окажутся на одной горизонтали, если угол между стержнями в этом момент равен 2б.
Найти ускорение бусинки А в тот момент, когда бусинка В будет на расстоянии L от точки О. Два стержня длины L соединены шарнирно. Свободный конец одного из стержней шарнирно закреплён на вертикальной стене, а свободный конец другого стержня двигают с постоянной по величине вертикальной скоростью х0. Найти величину и направление вектора ускорения шарнира, соединяющего стержни, в момент, когда их концы окажутся на одной горизонтали, если угол между стержнями в этом момент равен 2б.

Два жёстких стержня длины ℓ каждый шарнирно скреплены в точке А. жёстко закреплён в точке В, а точка С стержня АС может скользить по направляющей ВС. Стержень ВА начинают вращать в плоскости рисунка вокруг точки В с постоянной угловой скоростью щ. Чему будут равны максимальная скорость и ускорение точки С, если в начальный момент стержни вытянуты вдоль направляющей ВС (
Кинематические связи
Кинематические связи – уравнения, связывающие между собой кинематические характеристики (координата, скорость, ускорение) тел системы.
Зачастую связи между кинематическими характеристиками различных тел системы возникают благодаря замене реальных тел на физические модели. Физическая модель – это упрощенная версия некоторого явления или тела, которая сохраняет свойства этого явления или тела, исследуемые в данной задаче.
Разберем наиболее распространенные физические модели и кинематические связи, появляющиеся при их использовании.
1. Модель абсолютно твердого тела (АТТ).
Абсолютно твердым телом называется тело, расстояние между любыми двумя точками которого постоянно. Надо понимать, что указанное свойство присуще абсолютно твердому телу всегда, независимо от взаимодействия его с другими телами и от способа движения этого тела. Поэтому если мы рассмотрим две произвольные точки АТТ (A) и (B) , то в любой момент времени проекции скоростей этих точек (V_) и (V_) на ось (x) , соединяющую (A) и (B) (см. рисунок 1), должны быть равны друг другу, иначе точка (B) будет «убегать» от точки (A) , или наоборот, точка (A) будет «догонять» точку (B) , что невозможно, так как расстояние между ними остается постоянным. Таким образом, в данном случае уравнение кинематической связи связывает проекции скоростей:
Если рассмотреть две оси, — (y) и (z) — перпендикулярные скоростям (V_A) и (V_B) точек (A) и (B) соответственно и проходящие через эти точки, и точку пересечения этих осей обозначить как (O) (см. рисунок 2), то, записывая аналогичные (1) уравнения кинематической связи для точек (O) и (A) на оси (y) и (O) и (B) на оси (z) , получим:
Отсюда следует, что скорость точки (O) равна нулю: (V_O=0) . Такой показатель скорости, а также то обстоятельство, что вокруг точки (O) в данный момент происходит вращение, позволяют назвать точку (O) мгновенным центром вращения (МЦВ) изучаемого нами тела. Стоит понимать, что с течением времени положение МЦВ в пространстве способно изменяться, и к тому же он не обязан быть одной из точек тела и может лежать вне его (например, МЦВ колеса автомобиля при торможении).
В силу того, что тело вращается вокруг точки (O) , для описания его вращения можно использовать понятия угла поворота (φ) , угловой скорости (ω) и углового ускорения (ε) . Учитывая тот факт, что расстояние между любыми двумя точками тела постоянно, для любых двух точек (A) и (B) , находящихся на одинаковом расстоянии от МЦВ, мы вправе записать:
а для любых двух точек (B) и (C) , лежащих на одной прямой с точкой (O) на расстояниях (OB=r) и (OC=R) , следующее:
Выражения (2) и (3), как и предыдущие, являются уравнениями кинематической связи. Геометрическая интерпретация уравнения (3) представлена на рисунке 2: скорости и расстояния являются катетами подобных прямоугольных треугольников.
2. Нерастяжимая нить.
Нерастяжимая нить – это частный случай, разновидность абсолютно твердого тела, в которой расстояние между точками сохраняется вдоль единственного направления – контура нити. Для этой модели равными будут проекции скоростей любых двух точек (A) и (B) на направление нити в данных точках, что является следствием уравнения (1):
Разберем пример задачи с использованием кинематических связей.
Задача 1 («3800 задач по физике для школьников и поступающих в вузы», 1.90º). Тяжелый ящик перемещают с помощью двух тракторов, движущихся со скоростями (overrightarrow ) и (overrightarrow ) , образующими угол (α) . Как направлена и чему равна скорость ящика в тот момент, когда канаты натянуты и параллельны векторам (overrightarrow ) и (overrightarrow ) ?
Решение задачи 1.
Точка (O) (см. рисунок 4) является точкой ящика, движущегося поступательно, поэтому для определения скорости ящика достаточно найти скорость этой точки. В то же время (O) — это точка обоих канатов, поэтому ее скорость (v) удовлетворяет двум уравнениям кинематической связи, для каждого из канатов. Введя угол (β) между скоростями (v) и (v_1) , можно записать эти уравнения в виде:
(begin v_2=vcos(α-β)=v(cosα cosβ+sinα sinβ), \ v_1=vcosβ\ end) (4)
Разделив первое уравнение системы (4) на второе, получим:
Особенно важными являются задачи, в которых фигурируют системы блоков. Написание уравнения кинематической связи при их решении является нетривиальной проблемой. Рассмотрим два основных способа получения уравнения кинематической связи на примере простейшей задачи с блоками.
Задача 2 («Задачи по физике» под ред. О.Я. Савченко, 1.5.1.).
Скорость груза (A) (см. рисунок 5) равна (v_A) . Чему равна скорость груза (B) ?
Решение задачи 2.
Способ 1. Уравнение длины нити.
Введем ось (x) , направленную, как на рисунке 6. Введем обозначения: (x_1) – координата подвижного блока, (x_2) – координата неподвижного блока, (x_B) – координата груза (B) . Тогда, приняв длину зеленой нити за (L) , рассмотрим два близких момента времени (t) и (t’) ( (t’-t=∆t→0) ) и запишем:
(begin L = x_1 + (x_1 — x_2) + (x_B — x_2) + πR_1 + πR_2, \ L = > + (> — x_2) + (> — x_2) + πR_1 + πR_2 \ end) , (5)
где (R_1) и (R_2) – радиусы блоков. Вычитаем из первого уравнения системы (5) второе и делим результат на (∆t) . Получаем:
Таким образом, мы вывели уравнение кинематической связи (6) для грузов (A) и (B) , где (v_A) и (v_B) – проекции скоростей грузов на ось (x) (то есть уравнение (6) связывает также направления скоростей грузов). Аналогичную связь можно записать и для ускорений грузов, если рассмотреть изменение скорости за некоторый период времени точно так же, как мы рассматривали изменение координаты.
Способ 2. Метод малых (виртуальных) перемещений.
Представим мысленно, что за некоторый малый промежуток времени (∆t) груз (A) сместился вниз на расстояние (∆x) (см. рисунок 7). Для того чтобы такое смещение произошло, вертикальные участки зеленой нити должны увеличиться на (∆x) справа и слева от подвижного блока. В нашей системе длина нити в левой части системы увеличилась на (2∆x) . Из-за этого в силу нерастяжимости нити длина нити в правой части системы должна уменьшиться на (2∆x) , а это означает, что груз (B) за интервал времени (∆t) сместится вверх на расстояние (2∆x) . Таким образом:
Разделив обе части уравнения (7) на (∆t) , получим:
Мы получили уравнение кинематической связи, аналогичное уравнению (6), но в этот раз не учитывающее направление скоростей. Направление скоростей мы учли при выводе этого уравнения.
Список использованной литературы:
- «3800 задач по физике для школьников и поступающих в вузы».
- «Задачи по физике» под редакцией О.Я. Савченко.
Задачи для самостоятельного решения:
1) «Задачи по физике» под редакцией О.Я. Савченко.
1.5.4, 1.5.5*, 1.5.9*, 1.5.14*, 1.5.16
2) «Задачи Московских городских олимпиад по физике. 1986-2005» Варламов С.Д. и др.
3) «1001 задача по физике с решениями» Гельфгат И.М. и др.
Вопросы по содержанию статьи:
1) Выберите верное уравнение кинематической связи для двух точек АТТ, изображенного на рисунке.
2) Где находится МЦВ колеса, движущегося горизонтально без проскальзывания?
II. (B) .
3) Зависит ли положение МЦВ тела в пространстве от системы отсчета, в которой мы рассматриваем движение данного тела?
http://pandia.ru/text/80/516/31810.php
http://moscowinners.ru/proektyi/sverxurochnyie/fizika/stati/kinematicheskie-svyazi.html
ГЛАВА1
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ И
ПРОСТЕЙШИХ СИСТЕМ
1.1. Теоретический материал
Физическая величина – это количественная характеристика свойства материальных объектов или явлений (процессов). Каждая физическая величина устанавливается однозначным способом ее измерения – экспериментального определения или расчета. Определение физической величины указывает принципиальный способ ее измерения.
Физическое понятие (модель объекта или явления) – это абстракция (филос.), которая отражает только основные, наиболее существенные, свойства материальных объектов или явлений (процессов).
Критерий правильности выбора модели. Если в данной задаче физическая величина, описывающая неосновное свойство, от которого мы абстрагируемся, много меньше другой, характерной для этой задачи, величины той же размерности, то модель выбрана верно.
Заметим, что один и тот же материальный объект или одно и то же явление в различных условиях могут быть рассмотрены в рамках различных моделей, если они удовлетворяют критериям правильности выбора этих моделей.
Тело отсчета – тело, относительно которого рассматривается движение других тел.
Часы – неподвижный относительно тела отсчета прибор для измерения времени, принцип действия которого основан на сравнении длительности исследуемого временного интервала с длительностью выбранного за эталон периодического процесса.
Система отсчета – совокупность системы координат[1], связанной с телом отсчета, и набора синхронизированных часов, размещенных в разных точках координатной системы.
Условие синхронизации часов A и B, расположенных в разных точках системы отсчета (в предположении об изотропности пространства):
![]() (1.1)
(1.1)
Здесь – момент времени излучения из точки A светового сигнала (кванта света) по часам в точке A, – момент времени регистрации этого сигнала в точке B по часам в точке B, – момент времени регистрации в точке A отраженного в точке B сигнала по часам в точке A.
Материальная точка – физическое понятие (модель, абстракция), представляющее тело, размерами (и формой) которого можно пренебречь в условиях данной задачи.
Положение материальной точки относительно данной системы отсчета (в данной системе отсчета) S задается ее координатами или радиус-вектором .
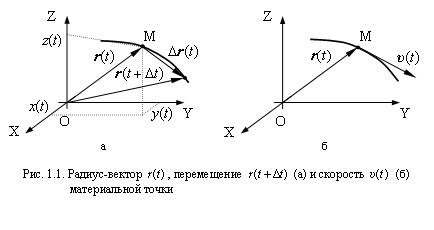
Радиус-вектор материальной точки относительно данной системы отсчета – вектор, начало которого находится в начале координат этой системы, а конец – в месте расположения материальной точки (см. рис. 1.1а):
![]() , (1.2)
, (1.2)
где , и – орты декартовой системы координат: , , ; x, y, z – координаты материальной точки.
 |
Закон движения материальной точки относительно данной системы отсчета – зависимость радиус-вектора или координат материальной точки от времени:
(1.3)
Траектория движения материальной точки – линия, описываемая в пространстве концом радиус-вектора материальной точки.
Уравнение траектории задается совокупностью двух уравнений
(1.4)
которые можно получить, исключая время из закона движения в координатной форме (1.3). Заметим, что сам закон движения в координатной форме представляет собой уравнение траектории, заданное в параметрическом виде.
Перемещение материальной точки – изменение радиус-вектора материальной точки за время Dt с момента времени t (рис. 1а):
. (1.5)
Скорость материальной точки относительно данной системы отсчета – физическая величина, равная производной радиус-вектора материальной точки по времени (производная берется при постоянных ортах системы координат, поскольку они жестко связаны с телом отсчета):
, (1.6)
где , , – проекции скорости на соответствующие оси системы координат. Скорость можно представить в виде суммы составляющих скорости вдоль осей системы координат:
. (1.7)
При этом модуль скорости равен
. (1.8)
В соответствии с определением скорость всегда направлена по касательной к траектории (см. рис. 1.1б).
Зная закон изменения скорости материальной точки , и радиус-вектор в начальный момент времени t0, можно найти закон движения:
. (1.9)
Путь s(t), пройденный материальной точкой вдоль траектории (длина траектории) за время t, равен
, (1.10)
при этом модуль скорости в любой момент времени равен
. (1.11)
Ускорение материальной точки относительно данной системы отсчета – физическая величина, равная производной скорости материальной точки по времени (при постоянных ортах системы координат):
, (1.12)
где ax, ay, az – проекции ускорения на соответствующие оси системы координат. Ускорение можно представить в виде суммы составляющих ускорения вдоль осей системы координат:
. (1.13)
При этом модуль ускорения равен
. (1.14)
Зная закон изменения ускорения материальной точки , а также скорость и радиус-вектор в начальный момент времени t0, можно найти закон изменения скорости и закон движения:
, (1.15)
. (1.16)
Начальные условия для материальной точки – значения радиус-вектора и скорости в начальный момент времени t0 относительно заданной системы отсчета:
(1.17)
Тангенциальное ускорение – составляющая ускорения вдоль направления скорости (см. рис. 1.2):
, , , (1.18)
, (1.19)
где – проекция ускорения на направление скорости .
Движение материальной точки при – ускоренное, при – замедленное, при – равномерное, а при – равнопеременное.
Нормальное ускорение – составляющая ускорения , перпендикулярная направлению скорости (рис. 1.2):
, , , (1.20)
где – проекция ускорения на направление , перпендикулярное скорости и направленное к центру кривизны траектории.
Нормальное ускорение всегда направлено к центру кривизны траектории – центру окружности максимального радиуса (радиуса кривизны траектории), касательной к траектории в данной точке, при этом
, (1.21)
где – радиус кривизны траектории в данной точке, а – угол между скоростями в моменты времени t и t + dt.
Ускорение можно представить в виде суммы нормального и тангенциального ускорений:
. (1.22)
При этом модуль ускорения равен
. (1.23)
В соответствии с (1.21) и (1.22) ускорение всегда отклонено от направления скорости в сторону центра кривизны траектории в данной точке, то есть внутрь траектории (см. рис. 1.2).
В частном случае движения материальной точки по окружности, т.е. движения в плоскости по траектории с постоянным радиусом кривизны – (рис. 1.3), можно ввести угловую скорость и угловое ускорение :
(1.24)
При этом:
(1.25)
Механическая система – совокупность материальных тел.
Система материальных точек – совокупность тел, каждое из которых можно считать материальной точкой. Далее будем считать, что всякую рассматриваемую нами механическую систему можно рассматривать как систему материальных точек.
Абсолютно твердое тело – тело (система материальных точек), расстояния между двумя любыми материальными точками которого не меняются в условиях данной задачи.
Поступательное движение абсолютно твердого тела – движение, при котором прямая, соединяющая любые две материальные точки тела, перемещается параллельно самой себе.
Принцип суперпозиции движений – в случае поступательного движения системы отсчета S¢ относительно системы S (рис. 1.4) радиус-вектор (скорость, ускорение) произвольной материальной точки относительно системы S равен сумме радиус-векторов (скоростей, ускорений) начала отсчета O’ системы S’ и той же материальной точки относительно системы S’:
(1.26)
Здесь и – переносные скорость и ускорение соответственно.
Уравнения кинематической связи – уравнения, связывающие кинематические характеристики различных тел системы:
(1.27)
Существуют два способа нахождения уравнений кинематической связи.
Способ 1. Принцип независимых перемещений. Перемещение какого-либо тела в системе связанных тел складывается из так называемых «независимых» перемещений, каждое из которых обусловлено (вызвано) перемещением соответствующего другого тела системы при покоящихся остальных телах:
. (1.28)
Способ 2. Записать величины постоянных кинематических характеристик элементов связей (нитей, штанг, блоков, поверхностей и т.д.) через координаты тел системы, используя свойства этих элементов (нерастяжимость, неподвижность, недеформированность), и продифференцировать эти величины по времени.
1.2. Основные типы задач и методы их решения
1.2.1. Классификация задач кинематики
Основной задачей кинематики является определение кинематических характеристик тел, движущихся относительно данной системы отсчета.
Большинство задач кинематики можно условно отнести к следующим типам задач или их комбинациям:
1) кинематика материальной точки,
2) принцип суперпозиции движений,
3) уравнения кинематической связи,
4) кинематика простейших механических систем.
Как правило, один из типов задач имеет основное, другие – подчиненное по отношению к условию задачи значение.
1.2.2. Общая схема решения задач кинематики
I. Определиться с моделями материальных объектов и явлений.
1. Нарисовать чертеж, на котором изобразить рассматриваемые тела.
2. Выбрать систему отсчета и изобразить на чертеже ее систему координат (из соображений удобства).
3. Изобразить и обозначить кинематические характеристики тел.
4. Выбрать модели тел и их движения (если это не сделано в условии задачи).
II. Записать полную систему уравнений для искомых величин.
1. Записать в проекциях на оси координат:
а) законы движения,
б) законы изменения скорости,
в) законы изменения ускорения.
2. Записать начальные условия.
3. Записать уравнения кинематических связей.
4. Использовать результаты ранее решенных задач и особые условия задачи (например, заданные соотношения между характеристиками системы).
III. Получить искомый результат в аналитическом и численном видах.
1. Решить систему полученных уравнений.
2. Провести анализ решения (проверить размерность и лишние корни, рассмотреть характерные случаи, установить область применимости).
3. Получить численный результат.
Примечания.
В случае решения задач на кинематику материальной точки в пп. I.3 – II.2 речь идет о кинематических характеристиках материальной точки, а п. II.3 надо опустить.
В случае решения задач на кинематику простейших механических систем в пп. I.3 – II.2 речь идет о кинематических характеристиках тел рассматриваемой системы.
Пункты II.1 – II.3 (в том числе II.2.a – II.2.в) можно выполнять в той или иной последовательности в зависимости от типа задачи.
1.3. Примеры решения задач
Задача 1.1
(Кинематика материальной точки)
Скорость материальной точки зависит от ее положения в декартовой системе координат следующим образом: , где c и b – положительные постоянные величины. В начальный момент времени радиус-вектор материальной точки равен нулю: . Определить:
а) законы движения , изменения скорости и ускорения , тангенциальную и нормальную проекции ускорения;
б) уравнение траектории y(x) материальной точки;
в) радиус кривизны траектории ;
г) угол между скоростью и ускорением .
Решение
Следуем общей схеме решения задач кинематики материальной точки и простейших систем.
I. По условию задачи движение происходит в плоскости XY, образованной координатными осями, направления которых заданы ортами и .
II. Запишем начальные условия и закон изменения скорости тела в проекциях на оси выбранной системы координат:
(1.29)
(1.30)
III. Записанные дифференциальные уравнения относительно координат материальной точки (1.29) с учетом начальных условий (1.29) позволяют найти закон движения материальной точки в проекциях на оси координат и зависимость от времени радиус-вектора :
(1.31)
. (1.32)
Используя найденную зависимость x(t) (1.31), определим закон изменения скорости и закон изменения ускорения :
, (1.33)
. (1.34)
Уравнение траектории находится из закона движения материальной точки путем исключения из (1.31) времени t:
. (1.35)
Остальные искомые величины определяются в соответствии с формулами, приведенными в п. 1 данной Главы.
Модуль скорости (1.7) равен:
. (1.36)
Проекции ускорения и (1.19, 1.23) получим в виде:
(1.37)
Радиус кривизны траектории (1.21) равен:
. (1.38)
Угол между скоростью и ускорением определяется соотношением:
. (1.39)
Заметим, что материальная точка движется по параболической траектории (1.35) с постоянным ускорением, направленным вдоль оси Y (1.34). На рис. 1.5 схематично изображена траектория движения материальной точки и изображены векторы ускорения и начальной скорости.
Нетрудно видеть, что при решения соответствуют начальным условиям задачи. При этом тангенциальное ускорение в указанный момент времени равно нулю, радиус кривизны траектории в данный момент времени , а угол между скоростью и ускорением .
При значения координат точки и модуль скорости, как и следовало ожидать, неограниченно возрастают, нормальное ускорение и угол между скоростью и ускорением стремятся к нулю, а радиус кривизны траектории – к бесконечности.
Задача 1.2
(Кинематика материальной точки)
Находящееся на высоте H над Землей тело бросили горизонтально с начальной скоростью . Найти закон движения тела, уравнение траектории, законы изменения скорости и ускорения, а также нормальную и тангенциальную проекции ускорения и радиус кривизны траектории в произвольный момент времени.
Решение
I. Нарисуем чертеж и изобразим на нем заданную в условии задачи скорость тела в начальный момент времени (t = 0) и предполагаемую траекторию движения тела (рис. 1.6).
Выберем систему отсчета, связанную с Землей. Ось X декартовой системы координат направим горизонтально вдоль поверхности Земли по направлению начальной скорости , а ось Y – вертикально вверх на положение тела в начальный момент времени. Будем считать, что тело является материальной точкой, а движение тела у поверхности Земли происходит с постоянным ускорением свободного падения .
II. В соответствии с выбранной системой отсчета и выбранными моделями тела и его движения запишем начальные условия и закон изменения ускорения тела в проекциях на оси координат:
(1.40)
(1.41)
III. Записанные дифференциальные уравнения относительно проекций скорости материальной точки с учетом начальных значений позволяют найти закон изменения скорости тела и закон его движения в проекциях на оси координат:
(1.42)
(1.43)
Уравнение траектории находится из закона движения тела в координатной форме (1.43) путем исключения времени t:
. (1.44)
Остальные искомые величины определяются в соответствии с формулами, приведенными в п. 1 данной Главы.
Модуль скорости (1.8) равен:
. (1.45)
Модуль ускорения (1.14) имеет вид:
. (1.46)
Проекции ускорения на направление скорости и перпендикулярное ему направление (1.19, 1.23) равны:
, . (1.47)
Радиус кривизны (1.21) определяется соотношением:
. (1.48)
Заметим, что в данной задаче все формулы для нахождения искомых величин справедливы с начального момента времени t0 = 0 до момента падения тела на Землю t0 £ t£ tпад. Этот момент времени легко найти из закона движения (1.43), приняв координату y равной нулю:
. (1.49)
Задача 1.3
(Кинематика материальной точки и принцип
суперпозиции движений)
Лодка пересекает реку с постоянной относительно воды скоростью , перпендикулярной направлению течения реки. Модуль скорости течения реки, ширина которой d, нарастает от берегов к середине реки по параболическому закону, изменяясь от 0 до um. Найти уравнение траектории лодки, время ее движения , а также снос лодки l вниз по течению от места ее отплытия до места причаливания на противоположном берегу реки.
Решение
I. Выберем декартову систему координат, жестко связанную с берегом реки, и с началом в месте отплытия лодки. Оси системы координат и скорость течения реки изображены на рис. 1.7.
При решении задачи лодку будем считать материальной точкой, а берега реки параллельными.
II. Запишем начальные условия для лодки в соответствии с условиями задачи:
(1.50)
где , – проекции скорости лодки на оси выбранной системы координат.
В соответствии с принципом суперпозиции движений (1.26) в любой момент времени или в проекциях на оси координат:
(1.51)
По условию задачи модуль скорости течения реки, ширина которой d, нарастает от берегов к середине реки по параболическому закону, поэтому можно записать:
, (1.52)
где и – постоянные величины. Для определения величины используем условие задачи:
. (1.53)
Используя начальные условия и соотношение (1.53), получим величину a:
. (1.54)
III. Система уравнений (1.51) с учетом (1.52) – (1.54) преобразуется к виду:
(1.55)
Интегрируя уравнения (1.55) с учетом начальных условий для координат лодки (1.50), находим закон движения:
, (1.56)
. (1.57)
Уравнение траектории получаем, исключая время t из закона движения в координатной форме (1.56) и (1.57):
. (1.58)
Поскольку в момент причаливания , время движения лодки равно:
. (1.59)
Следовательно, для искомого сноса лодки l получим (см. 1.58):
. (1.60)
Задача 1.4
(Принцип суперпозиции движений)
Определить форму траектории капель дождя на боковом стекле трамвая, движущегося горизонтально со скоростью , во время его торможения с ускорением . Капли дождя падают на землю вертикально вниз, и скорость их относительно земли постоянна и равна .
Решение
I. Нарисуем чертеж и изобразим на нем заданные в условии задачи кинематические характеристики капли дождя и трамвая в момент начала торможения трамвая (рис. 1.8).
Выберем систему координат XY, связанную с Землей, так, чтобы ось X была направлена горизонтально вдоль ускорения трамвая, а ось Y – вертикально вниз. Выберем также вторую систему координат X¢Y¢, связанную со стеклом трамвая, так, чтобы ее оси X¢ и Y¢ были сонаправлены с осями X и Y. Время в обеих системах отсчитываем от момента начала торможения трамвая.
Будем считать, что капля дождя является материальной точкой, положение которой в момент начала торможения трамвая совпадает с началом координат системы X¢Y¢.
II. Используя принцип суперпозиции движений (1.26), запишем скорость и ускорение капли дождя относительно стекла трамвая (системы координат X¢Y¢):
, (1.61)
. (1.62)
В соответствии с выбранной системой отсчета запишем начальные условия для капли дождя:
, (1.63)
, (1.64)
III. Записанные дифференциальные уравнения (1.61) и (1.62) с учетом начальных условий (1.63) и (1.64) позволяют найти закон движения капли в проекциях на оси координат:
(1.65)
Уравнение траектории находится из закона движения капли путем исключения из (1.65) времени t:
. (1.66)
Как видим, траектория в системе координат X¢Y¢, связанной со стеклом трамвая, является параболой (см. рис. 1.9) с вершиной в точке с координатами:
, . (1.67)
Задача 1.5
(Уравнения кинематической связи)
Концы твердого стержня MN могут свободно скользить по сторонам прямого угла MON (см. рис. 1.10). Найти уравнение траектории точки P стержня, которая делит его на части длиной а и b.
Решение
I. Выберем и изобразим декартову систему координат, оси которой совпадают со сторонами угла MON (см. рис. 1.10).
В соответствии с условием задачи будем считать стержень абсолютно твердым. Следовательно, его положение в любой момент времени t однозначно задается углом j(t) между осью OX и стержнем MN.
II. Запишем закон движения точки P стержня в координатной форме (см. рис. 1.10):
(1.68)
Искомое уравнение траектории точки P можно получить, исключив время из закона движения (1.68).
III. Преобразуя уравнения (1.68), получаем:
. (1.69)
Следовательно, искомое уравнение траектории принимает вид:
. (1.70)
Уравнение (1.70) является уравнением эллипса с полуосями, совпадающими по направлению с осями выбранной системы координат и равными a и b. В случае, когда a = b, эллипс вырождается в окружность.
Задача 1.6
(Уравнения кинематической связи)
На клине с углом при основании a, расположенном на горизонтальной поверхности, находится система двух тел 1 и 2 (см. рис. 1.11), связанных нерастяжимой нитью, перевешенной через маленький блок, ось которого закреплена в верхней точке клина. Записать уравнение кинематической связи для ускорений клина и двух тел, если тело 2 не отрывается от вертикальной поверхности клина в процессе движения.
Решение
I. Выберем систему отсчета, связанную с горизонтальной поверхностью. Ось X декартовой системы координат направим горизонтально, а ось Y вертикально вверх (см. рис. 1.11).
Будем считать тела 1 и 2 материальными точками, связанными нерастяжимой нитью, а клин – абсолютно твердым телом, которое может двигаться поступательно вдоль оси X. Обозначим координаты первого и второго тел в системе координат XY – (x1, y1) и (x2, y2), соответственно. Линейные размеры блока по условию задачи малы по сравнению с длиной нити, поэтому не будем учитывать их при записи уравнений кинематической связи для координат тел системы.
II. Выразим длину нити l через вертикальные координаты различных точек рассматриваемой системы тел:
, (1.71)
где – координата блока, не изменяющаяся в процессе движения.
Если длину наклонного участка нити выразить через горизонтальные координаты тел системы, то выражение для длины нити принимает вид:
. (1.72)
III. Дифференцируя (1.71) и (1.72) дважды по времени и учитывая, что и , получаем искомые уравнения кинематической связи для ускорений тел рассматриваемой системы:
(1.73)
Задача 1.7
(Уравнения кинематической связи)
Система тел состоит из двух блоков и двух подвешенных к ним тел (см. рис. 1.12). Один из блоков составлен из двух коаксиальных цилиндров с неподвижной относительно потолка осью, имеющих различные радиусы r и R. Первое тело подвешено на нити, намотанной на цилиндр радиуса r, второй – на нити, прикрепленной к оси другого блока. Найти ускорение второго тела, если известно, что ускорение первого тела равно a1. Нити считать нерастяжимыми.
Решение
I. Выберем систему отсчета, жестко связанную с потолком. Направление осей декартовой системы координат, связанной с телом отсчета, показано на рис. 1.12.
Считаем тела 1 и 2 материальными точками, нити – нерастяжимыми. Проскальзывания нитей относительно блоков нет.
II. Пусть за малый интервал времени Dt изменение координаты первого тела равно Dx1 (для определенности будем считать, что оно опускается). Поскольку нить нерастяжима, то угол поворота Dj цилиндра радиусом r связан с величиной Dx1 следующим соотношением:
. (1.74)
При этом второй цилиндр радиусом R повернется на тот же угол Dj, а длина нити, на которой лежит блок с подвешенным к нему телом 2, изменится на величину:
. (1.75)
Изменение координаты центра второго блока, а значит и второго тела, равно:
. (1.76)
III. Решая систему уравнений (1.74) – (1.76), получим уравнение, связывающее изменения координат двух тел:
. (1.77)
Поделив левую и правую части (1.77) на малый интервал времени, получим уравнение кинематической связи для скоростей тел:
. (1.78)
Дифференцируя полученное соотношение по времени, получаем искомую связь между ускорениями тел:
. (1.79)
Задача 1.8
(Кинематика простейших механических систем)
На вал радиуса R, закрепленный на оси, намотана веревка, на конце которой висит груз, опускающийся вниз (см. рис. 1.13). Закон движения груза: x = x0 + bt2, где x0 и b – постоянные положительные величины. Определить угловые скорость w и ускорение b произвольной точки обода вала, модуль ускорения a, его нормальную an и тангенциальную at проекции. Записать закон движения этой точки.
Решение
I. Нарисуем чертеж и изобразим на нем направление скорости движения груза. В соответствии с условием задачи направим ось X декартовой системы координат вертикально вниз (рис. 1.13). Для определения ускорения и закона движения произвольной точки A на ободе вала выберем полярную систему координат с полярной осью Y, в которой угол j однозначно определяет положение рассматриваемой точки A. Поскольку в условии задачи не оговаривается иное, веревку считаем нерастяжимой и что проскальзывания веревки относительно вала нет.
II. Запишем заданный в задаче закон движения груза в декартовой системе координат:
. (1.80)
Поскольку веревка нерастяжима, уравнение кинематической связи имеет вид:
. (1.81)
Для решения задачи записанные уравнения необходимо дополнить определениями (1.24) и выражениями (1.25) для интересующих нас величин, приведенными в п. 1.1.
III. Найдем законы изменения скорости груза и его ускорения в проекциях на оси декартовой системы координат, используя определения (1.6) и (1.12):
, ; (1.82)
, . (1.83)
Точки обода вала совершают неравномерное движение по окружности, причем модуль их скорости (поскольку нить нерастяжима и не проскальзывает по поверхности обода) в каждый момент времени равен модулю скорости груза, поэтому, используя (1.22) для угловой скорости w и углового ускорения b, получаем:
, (1.84)
. (1.85)
Поскольку проекция ускорения груза на ось X равна тангенциальной проекции ускорения точек обода, то:
. (1.86)
Нормальную проекцию ускорения определим, используя (1.22):
. (1.87)
Модуль полного ускорения произвольной точки A на ободе колеса найдем из соотношения (1.20):
. (1.88)
Закон движения произвольной точки A на ободе вала запишем в полярной системе координат:
, (1.89)
где j0 – начальное значение угловой координаты точки A в выбранной полярной системе координат.
Задача 1.9
(На кинематику материальной точки)
Закон движения движущейся в плоскости материальной точки, заданный в полярной системе координат, имеет следующий вид: r = r(t), φ = φ(t). Определить законы изменения проекций скорости и ускорения материальной точки на направления, задаваемые ортами декартовой и полярной систем координат, жестко связанных с телом отсчета. Начало декартовой системы координат совпадает с полюсом полярной системы, а ось X декартовой системы направлена вдоль полярной оси (см. рис. 1.14).
Решение
I. Выберем ось Y декартовой системы координат так, чтобы плоскость XY совпадала с плоскостью, в которой движется материальная точка M (рис. 1.14). Для решения задачи используем две системы координат – декартову систему координат XOY c ортами и , и полярную, орты которой и изображены на рис. 1.14. Заметим, что при движении материальной точки происходит изменение ориентации ортов полярной системы и , в то время как орты декартовой системы координат и не изменяют своего направления.
II, III. Закон движения материальной точки, заданный в полярной системе, запишем в декартовой системе координат XOY:
(1.90)
Дифференцируя закон движения (1.90) по времени, получаем искомые законы изменения проекций скорости материальной точки и ее ускорения в декартовой системе координат:
(1.91)
(1.92)
В формулах (1.92), (1.92) и далее для краткости опустим запись зависимости кинематических величин от времени.
Проекции скорости и ускорения материальной точки в полярной системе координат находим двумя способами.
1 способ. Скорость и ускорение материальной точки в полярной системе координат записываются в виде:
, (1.93)
. (1.94)
Следовательно, проекции скорости и ускорения материальной точки на направления, задаваемые ортами рассматриваемых систем координат, связаны соотношениями:
(1.95)
(1.96)
Сравнивая соотношения (1.90) и (1.95), а также (1.91) и (1.96), получим искомые проекции скорости и ускорения материальной точки в полярной системе координат:
(1.97)
(1.98)
2 способ. Запишем радиус-вектор материальной точки в полярной системе координат:
. (1.99)
Поскольку при движении материальной точки происходит изменение ориентации ортов полярной системы и , найдем скорость их изменения (см. рис. 1.15):
(1.100)
Теперь для нахождения скорости и ускорения точки в той же системе координат необходимо продифференцировать радиус-вектор (1.99) по времени с учетом (1.100):
, (1.101)
. (1.102)
В соответствии с (1.101) и (1.102) искомые проекции скорости и ускорения материальной точки в полярной системе координат равны:
(1.103)
(1.104)
Как видим, оба способа решения дают одинаковый результат.
Задача 1.10
(На кинематику материальной точки)
Движение материальной точки в полярной системе координат задается взаимосвязью полярных координат , при этом полярный угол возрастает линейно во времени . Определить зависимость модуля скорости и модуля ускорения материальной точки от времени.
Решение
I. Решаем задачу в заданной полярной системе координат. Заметим, что материальная точка M движется по замкнутой траектории, периодически, с периодом , возвращаясь в ту же точку пространства (см. рис. 1.16).
II. Определим закон изменения проекций скорости и ускорения материальной точки в полярной системе координат, воспользовавшись формулами (1.103) и (1.104), полученными в предыдущей задаче:
(1.105)
(1.106)
Тогда искомые модули скорости и ускорения материальной точки равны:
, (1.107)
(1.108)
Заметим, что материальная точка в моменты времени (где = 0, 1, 2, …) находится в начале (полюсе) полярной системы координат, имеет нулевую скорость, а ускорение, по модулю равное , направлено противоположно полярной оси.
Задача 1.11
(На кинематику материальной точки)
Планета движется вокруг Солнца в соответствии с законами Кеплера по эллиптической траектории . Параметр эллипса , эксцентриситет и секторную скорость считать заданными. Определить проекции ускорения планеты в зависимости от координат и полярной системы.
Решение
I. При решении задачи будем считать планету и Солнце материальными точками. Согласно первому закону Кеплера все планеты движутся по эллиптическим орбитам, причем Солнце находится в одном из фокусов эллипса O (см. рис. 1.17).
В соответствии с условием задачи введем полярную систему координат в плоскости движения планеты, полюс которой совпадает с Солнцем, а полярная ось совпадает с одной из осей эллипса.
Согласно второму закону Кеплера секторная скорость планеты, равная скорости изменения площади, описываемой радиус-вектором материальной точки, представляющим планету, постоянна при движении планеты вокруг Солнца.
II. Для нахождения проекций ускорения планеты в полярной системе координат воспользуемся формулами (1.104):
(1.109)
Поскольку в уравнения (1.109) входят производные полярных координат по времени, дополним эту систему уравнением траектории планеты и выражением для ее секторной скорости :
, (1.110)
. (1.111)
III. В соответствии с условием задачи секторная скорость постоянна при движении планеты по эллиптической траектории, поэтому ее производная по времени равна нулю:
. (1.112)
Сравнивая (1.112) с выражением (1.109) для проекции ускорения , видим, что . Следовательно, ускорение в любой момент времени имеет только проекцию , которая в соответствии с (1.109) является функцией производных полярных координат по времени.
Продифференцируем обе части уравнения траектории (1.110) по времени:
. (1.113)
Используя уравнение траектории (1.110) и выражение для секторной скорости (1.111), преобразуем (1.113) к виду:
. (1.114)
Продифференцируем теперь обе части уравнения (1.114) по времени
. (1.115)
Опять воспользуемся уравнением траектории (1.110) и выражением для секторной скорости (1.111) для исключения и из (1.115):
. (1.116)
В результате находим:
. (1.117)
Для нахождения искомой проекции ускорения планеты , как функции только координат полярной системы, подставим (1.116) и (см. (1.111)) в выражение (1.109):
. (1.118)
Таким образом, ускорение планеты, движущейся по эллиптической траектории, направлено к Солнцу, не зависит от полярного угла и обратно пропорционально квадрату расстояния до Солнца:
(1.119)
Задача 1.12
(На кинематику материальной точки)
Небольшое тело движется по гладкой внутренней поверхности полого вертикального цилиндра радиуса R. В начальный момент времени скорость тела направлена перпендикулярно оси цилиндра и равна . Определить законы изменения скорости и ускорения материальной точки в цилиндрической системе координат, а также угол между скоростью и ускорением.
Решение
I. Будем считать тело материальной точкой, которая движется по цилиндрической поверхности с постоянной вертикальной составляющей ускорения, равной ускорению свободного падения . Для решения задачи выберем цилиндрическую систему координат, ось Z которой совпадает с осью цилиндра, как показано на рис. 1.18. На том же рисунке изображены орты er, ej и ez цилиндрической системы. Ось, от которой отсчитывается угол системы координат, направим на положение тела в начальный момент времени.
II. В соответствии с условиями задачи и выбранной системой координат запишем начальные значения проекций скорости для рассматриваемого тела:
, , . (1.120)
Воспользуемся формулами (1.103) и (1.104) для проекций скорости и ускорения тела на направления, задаваемые ортами цилиндрической системы:
, , , (1.121)
, , . (1.122)
Кроме того, в соответствии с условиями задачи, запишем:
, , . (1.123)
III. Используя (1.121) – (1.123), получим законы изменения проекций скорости и ускорения:
, , ; (1.124)
, , . (1.125)
Таким образом, искомый закон изменения скорости и ускорения в цилиндрической системе координат имеет следующий вид:
, (1.126)
. (1.127)
Определим также искомый угол a между скоростью и ускорением тела:
. (1.128)
1.4. Задачи для самостоятельного решения
Задача 1
Из пушки, находящейся на самолете, летящем горизонтально со скоростью , выпущен снаряд в направлении движения самолета. Скорость снаряда относительно самолета равна . Пренебрегая сопротивлением воздуха, найти:
1) уравнение траектории снаряда относительно Земли ;
2) уравнение траектории снаряда относительно самолета ;
3) уравнение траектории самолета относительно снаряда .
Ответ: 1) , 2) ,
3) , . Оси X, X‘ и X» декартовой системы координат направлены горизонтально вдоль скорости самолета, а оси Y, Y‘ и Y» – вертикально вверх, при этом начало координат системы XY совпадает с положением самолета в момент выстрела пушки.
Задача 2
Лодка пересекает реку шириной d с постоянной относительно воды скоростью , перпендикулярной скорости течения реки, модуль которой нарастает от берегов к середине реки по линейному закону, меняясь от 0 до u. Найти траекторию лодки, а также снос лодки l вниз по течению от места ее отплытия до места причаливания на противоположном берегу реки.
Ответ: , при y < d/2; , при y > d/2; . Ось X декартовой системы координат XY направлена вдоль берега реки, а ось Y – поперек реки. Начало системы координат, жестко связанной с берегом реки, совпадает с местом отплытия лодки.
Задача 3
По движущемуся вниз эскалатору спускается пассажир со скоростью относительно эскалатора. Скорость эскалатора равна u. Спускаясь по неподвижному эскалатору пассажир проходит N ступеней. Сколько ступеней N‘ пройдет пассажир, спускаясь по движущемуся эскалатору?
Ответ: .
Задача 4
Два трактора, движущиеся со скоростями и , буксируют с помощью тросов автомобиль (см. рис.).
Определить модуль и направление скорости автомобиля в тот момент, когда тросы параллельны векторам и , а угол между ними равен a.
Ответ: ,
, где – угол между векторами и .
Задача 5
Тело А подвешено на нитях, перекинутых через блоки В и С малого диаметра так, что АВ = ВС (см. рис.).
Концы нитей тянут с одинаковыми скоростями . Расстояние между блоками В и С равно L. Найти модуль скорости тела А в тот момент, когда оно находится на расстоянии H от прямой ВС.
Ответ: .
Задача 6
Лодку подтягивают к пристани высотой Н с помощью веревки, наматываемой на вал лебедки. Радиус вала равен R << H. Вал вращается с постоянной угловой скоростью w. Определить зависимость модулей скорости и ускорения лодки от длины веревки L > Н. Движение лодки считается поступательным.
Ответ: , .
Задача 7.
Найти уравнение кинематической связи для ускорений тел, подвешенных на нерастяжимых нитях (см. рис.).
Ответ: , где , и – проекции ускорений тел на вертикальную ось декартовой системы координат.
Задача 8
Определить закон изменения модуля скорости материальной точки, движущейся в плоскости, если ее движение описывается в полярной системе координат следующим законом: , , где и – положительные постоянные величины.
Ответ: , при .
Задача 9
Четыре тела подвешены на нерастяжимых нитях (см. рис.). Найти ускорение тела 4, если известны ускорения остальных трех тел.
Ответ: , где , , и – проекции ускорений тел на вертикальную ось декартовой системы координат.
Задача 10
Найти уравнение кинематической связи для ускорений тел, подвешенных на нерастяжимых нитях так, как показано на рисунке.
Ответ: ,
где , , , и – проекции ускорений тел на вертикальную ось декартовой системы координат.
Задача 11
Два тела подвешены на нерастяжимых нитях, как показано на рисунке. Определить ускорение тела 2, если известно ускорение тела 1.
Ответ: , где и – проекции ускорений тел на вертикальную ось декартовой системы координат.
[1] Далее в тексте, если это не оговаривается особо, используется декартова система координат.
Кинематические связи – уравнения, связывающие между собой кинематические характеристики (координата, скорость, ускорение) тел системы.
Зачастую связи между кинематическими характеристиками различных тел системы возникают благодаря замене реальных тел на физические модели. Физическая модель – это упрощенная версия некоторого явления или тела, которая сохраняет свойства этого явления или тела, исследуемые в данной задаче.
Разберем наиболее распространенные физические модели и кинематические связи, появляющиеся при их использовании.
1. Модель абсолютно твердого тела (АТТ).
Абсолютно твердым телом называется тело, расстояние между  любыми двумя точками которого постоянно. Надо понимать, что указанное свойство присуще абсолютно твердому телу всегда, независимо от взаимодействия его с другими телами и от способа движения этого тела. Поэтому если мы рассмотрим две произвольные точки АТТ (A) и (B), то в любой момент времени проекции скоростей этих точек (V_{A’x}) и (V_{B’x}) на ось (x), соединяющую (A) и (B) (см. рисунок 1), должны быть равны друг другу, иначе точка (B) будет «убегать» от точки (A), или наоборот, точка (A) будет «догонять» точку (B), что невозможно, так как расстояние между ними остается постоянным. Таким образом, в данном случае уравнение кинематической связи связывает проекции скоростей:
любыми двумя точками которого постоянно. Надо понимать, что указанное свойство присуще абсолютно твердому телу всегда, независимо от взаимодействия его с другими телами и от способа движения этого тела. Поэтому если мы рассмотрим две произвольные точки АТТ (A) и (B), то в любой момент времени проекции скоростей этих точек (V_{A’x}) и (V_{B’x}) на ось (x), соединяющую (A) и (B) (см. рисунок 1), должны быть равны друг другу, иначе точка (B) будет «убегать» от точки (A), или наоборот, точка (A) будет «догонять» точку (B), что невозможно, так как расстояние между ними остается постоянным. Таким образом, в данном случае уравнение кинематической связи связывает проекции скоростей:
(V_{A’x}=V_{B’x} ). (1)
Если рассмотреть две оси, — (y) и (z) — перпендикулярные  скоростям (V_A) и (V_B) точек (A) и (B) соответственно и проходящие через эти точки, и точку пересечения этих осей обозначить как (O) (см. рисунок 2), то, записывая аналогичные (1) уравнения кинематической связи для точек (O) и (A) на оси (y) и (O) и (B) на оси (z), получим:
скоростям (V_A) и (V_B) точек (A) и (B) соответственно и проходящие через эти точки, и точку пересечения этих осей обозначить как (O) (см. рисунок 2), то, записывая аналогичные (1) уравнения кинематической связи для точек (O) и (A) на оси (y) и (O) и (B) на оси (z), получим:
(V_{O’y}=V_{A’y}=0), (V_{O’z}=V_{B’z}=0.)
Отсюда следует, что скорость точки (O) равна нулю: (V_O=0). Такой показатель скорости, а также то обстоятельство, что вокруг точки (O) в данный момент происходит вращение, позволяют назвать точку (O) мгновенным центром вращения (МЦВ) изучаемого нами тела. Стоит понимать, что с течением времени положение МЦВ в пространстве способно изменяться, и к тому же он не обязан быть одной из точек тела и может лежать вне его (например, МЦВ колеса автомобиля при торможении).
В силу того, что тело вращается вокруг точки (O), для описания его вращения можно использовать понятия угла поворота (φ), угловой скорости (ω) и углового ускорения (ε). Учитывая тот факт, что расстояние между любыми двумя точками тела постоянно, для любых двух точек (A) и (B), находящихся на одинаковом расстоянии от МЦВ, мы вправе записать:
(V_A=V_B), (2)
а для любых двух точек (B) и (C), лежащих на одной прямой с точкой (O) на расстояниях (OB=r) и (OC=R), следующее:
(ω = {V_B over r} = {V_C over R}). (3)
Выражения (2) и (3), как и предыдущие, являются уравнениями кинематической связи. Геометрическая интерпретация уравнения (3) представлена на рисунке 2: скорости и расстояния являются катетами подобных прямоугольных треугольников.
2. Нерастяжимая нить.
Нерастяжимая нить – это частный случай, разновидность абсолютно твердого тела, в которой расстояние между точками сохраняется вдоль единственного направления – контура нити. Для этой модели равными будут проекции скоростей любых двух точек (A) и (B) на направление нити в данных точках, что является следствием уравнения (1):
(V_{A’нить}=V_{B’нить}).
Разберем пример задачи с использованием кинематических связей.
Задача 1 («3800 задач по физике для школьников  и поступающих в вузы», 1.90º). Тяжелый ящик перемещают с помощью двух тракторов, движущихся со скоростями (overrightarrow {v_1}) и (overrightarrow {v_2}), образующими угол (α). Как направлена и чему равна скорость ящика в тот момент, когда канаты натянуты и параллельны векторам (overrightarrow {v_1}) и (overrightarrow {v_2})?
и поступающих в вузы», 1.90º). Тяжелый ящик перемещают с помощью двух тракторов, движущихся со скоростями (overrightarrow {v_1}) и (overrightarrow {v_2}), образующими угол (α). Как направлена и чему равна скорость ящика в тот момент, когда канаты натянуты и параллельны векторам (overrightarrow {v_1}) и (overrightarrow {v_2})?
Решение задачи 1.
Точка (O) (см. рисунок 4) является точкой ящика, движущегося  поступательно, поэтому для определения скорости ящика достаточно найти скорость этой точки. В то же время (O) — это точка обоих канатов, поэтому ее скорость (v) удовлетворяет двум уравнениям кинематической связи, для каждого из канатов. Введя угол (β) между скоростями (v) и (v_1), можно записать эти уравнения в виде:
поступательно, поэтому для определения скорости ящика достаточно найти скорость этой точки. В то же время (O) — это точка обоих канатов, поэтому ее скорость (v) удовлетворяет двум уравнениям кинематической связи, для каждого из канатов. Введя угол (β) между скоростями (v) и (v_1), можно записать эти уравнения в виде:
(begin{cases} v_2=vcos(α-β)=v(cosα cosβ+sinα sinβ), \ v_1=vcosβ\ end{cases})(4)
Разделив первое уравнение системы (4) на второе, получим:
({v_2 over v_1} = cosα+sinα tgβ), (tgβ = {v_2/v_1- cosα over sinα}), (v= {v_1 over cosβ} =v_1 sqrt {1+tg^2β}).
Особенно важными являются задачи, в которых фигурируют системы блоков. Написание уравнения кинематической связи при их решении является нетривиальной проблемой. Рассмотрим два основных способа получения уравнения кинематической связи на примере простейшей задачи с блоками.
Задача 2 («Задачи по физике» под ред. О.Я. Савченко, 1.5.1.).
Скорость груза (A) (см. рисунок 5) равна (v_A). Чему равна скорость груза (B)?
Решение задачи 2.
Способ 1. Уравнение длины нити.

Введем ось (x), направленную, как на рисунке 6. Введем обозначения: (x_1) – координата подвижного блока, (x_2) – координата неподвижного блока, (x_B) – координата груза (B). Тогда, приняв длину зеленой нити за (L), рассмотрим два близких момента времени (t) и (t’) ((t’-t=∆t→0)) и запишем:
(begin{cases} L = x_1 + (x_1 — x_2) + (x_B — x_2) + πR_1 + πR_2, \ L = {x_1^{prime}} + ({x_1^{prime}} — x_2) + ({x_B^{prime}} — x_2) + πR_1 + πR_2 \ end{cases}), (5)
где (R_1)и (R_2) – радиусы блоков. Вычитаем из первого уравнения системы (5) второе и делим результат на (∆t). Получаем:
(0=2 {x_1′ — x_1 over ∆t} + {x_B’-x_B over ∆t} =2v_A+v_B). (6)
Таким образом, мы вывели уравнение кинематической связи (6) для грузов (A) и (B), где (v_A) и (v_B) – проекции скоростей грузов на ось (x) (то есть уравнение (6) связывает также направления скоростей грузов). Аналогичную связь можно записать и для ускорений грузов, если рассмотреть изменение скорости за некоторый период времени точно так же, как мы рассматривали изменение координаты.
Способ 2. Метод малых (виртуальных) перемещений.
Представим мысленно, что за некоторый малый промежуток времени (∆t) груз (A) сместился вниз на расстояние (∆x) (см. рисунок 7). Для того чтобы такое смещение произошло, вертикальные участки зеленой нити должны увеличиться на (∆x) справа и слева от подвижного блока. В нашей системе длина нити в левой части системы увеличилась на (2∆x). Из-за этого в силу нерастяжимости нити длина нити в правой части системы должна уменьшиться на (2∆x), а это означает, что груз (B) за интервал времени (∆t) сместится вверх на расстояние (2∆x). Таким образом:
(2∆x_A=∆x_B). (7)
Разделив обе части уравнения (7) на (∆t), получим:
(2v_A=v_B).
Мы получили уравнение кинематической связи, аналогичное уравнению (6), но в этот раз не учитывающее направление скоростей. Направление скоростей мы учли при выводе этого уравнения.
Список использованной литературы:
- «3800 задач по физике для школьников и поступающих в вузы».
- «Задачи по физике» под редакцией О.Я. Савченко.
Задачи для самостоятельного решения:
1) «Задачи по физике» под редакцией О.Я. Савченко.
1.5.4, 1.5.5*, 1.5.9*, 1.5.14*, 1.5.16
2) «Задачи Московских городских олимпиад по физике. 1986-2005» Варламов С.Д. и др.
1.31*, 1.32*, 1.57*
3) «1001 задача по физике с решениями» Гельфгат И.М. и др.
1.53*, 1.56
Вопросы по содержанию статьи:
1) Выберите верное уравнение кинематической связи для двух  точек АТТ, изображенного на рисунке.
точек АТТ, изображенного на рисунке.
I. (V_Asinα=V_Bcosβ).
II. (V_Acosα=V_Bsinβ).
III. (V_Acosα=V_Bcosβ).
IV. (V_Asinα=V_Bsinβ).
2) Где находится МЦВ колеса, движущегося горизонтально без проскальзывания?
I. (A).
II. (B).
III. (C).
IV. (D).
3) Зависит ли положение МЦВ тела в пространстве от системы отсчета, в которой мы рассматриваем движение данного тела?
I. Не зависит.
II. Зависит.
Ответы
Кинематические связи
Задача
3.6. Клин
высотой h
с углом наклона α
стоит на гладкой горизонтальной
плоскости. Масса клина М.
С вершины клина начинает соскальзывать
без трения брусок массой m.
Найдите ускорение клина и время
соскальзывания бруска.

Рис.
3.4.1.
1
– векторы ускорений: а1
– клина, а2
– бруска;
2
– расстановка сил, действующих на клин
и брусок.
Студент:
Начнем со второго закона Ньютона. Запишем
его для клина в проекции на горизонтальное
направление
Nsinα=Мa1
. (3.4.1)
Здесь
N
– модуль силы действия бруска на клин
N12.
Автор:
– Для бруска запишите закон в векторном
виде. Дело в том, что выбор направления
осей для бруска связан с решением вопроса
о кинематической связи, и в дальнейшем
будет понятно, что это удобная форма
записи уравнения движения.
Студент:
–
N21+mg=ma2
. (3.4.2)
Здесь
N21
– вектор силы действия поверхности
клина на брусок. По третьему закону
Ньютона её модуль равен N.
Автор:
– Кинематическая связь между ускорениями
должна отражать тот факт, что в процессе
движения брусок все время остается на
поверхности клина. Поэтому удобно
перейти в систему отсчета клина. В этой
системе скорость бруска Vотн
и его ускорение
aотн
направлены вдоль клина. Тогда из закона
сложения скоростей
V2=Vотн
+V1
получаем
закон сложения ускорений:
а2=аотн
+а1
(3.4.3)
Здесь
индексы 1 и 2 относятся к клину и бруску
соответственно.
Отсюда
видно, что от неизвестных
a1,
и
a2
удобнее перейти к неизвестным
a1
и аотн.
Подставьте равенство (3.4.3) в уравнение
(3.4.2) и спроецируйте обе части этого
векторного равенства на направления:
вдоль поверхности клина и перпендикулярно
ей.
Студент:
mgsinα=m(аотн
– a1cosα),
N–mgcosα=
–ma1sinα.
Решая
эти уравнения с учетом (3.4.5), находим
◄![]() ►,
►,
aотн
=
![]() .
.
Время
соскальзывания зависит только от
aотн
, пройденный путь при этом равен h/sinα.
Значит,
aотнt2/2=
h/sinα.
Отсюда
◄![]() ►.
►.
Автор:
– Правильно.
Задача
3.7.
Невесомый
стержень длиной L
с грузами массой m
на концах соскальзывает по сторонам
прямого двугранного угла. Найдите
скорости грузов в тот момент, когда
стержень составляет с горизонтом угол
α.
Трения нет. В начальный момент стержень
находился в вертикальном положении.

Рис.3.4.2.
Студент:
– Изобразим промежуточное положение
стержня, как показано на рис.3.4.2. Пусть
ордината второго груза
у=Lsinα,
тогда
по закону сохранения энергии
mg(L–y)=mV21/2+
mV22/2
.
С
кинематической связью я затрудняюсь.
Автор:
– Поскольку расстояние между грузами
остается постоянным, то в каждый момент
скорость, с которой первый груз удаляется
от второго, равна скорости, с которой
второй груз приближается к первому.
Иначе говоря, проекции скоростей грузов
на ось стержня в любой момент времени
одинаковы:
V1cosα=V2sinα.
Используя
предыдущее равенство, находим скорости
◄![]() ,
,
![]() ►.
►.
Как
Вы думаете, можно ли считать данные
значения для скоростей окончательным
ответом?
Студент:
– Конечно, не вижу никаких ограничений.
Автор:
– В этой
задаче содержится поучительная тонкость.
Этот ответ был бы безупречным, если бы
второй груз не имел возможности оторваться
от стенки, например, находясь на шарнирном
закреплении.
Действительно,
т. к. сила реакции стенки всегда
действует вправо, то скорость центра
масс стержня не может уменьшаться. В
задаче нет сил, направленных влево
(стенка не может «притянуть» шарик).
Получается, что стержень рано или поздно
оторвется от стенки. Вопрос когда? Успеет
ли второй шарик достичь при этом
горизонтальной плоскости?
Исследуйте
зависимость V1
от безразмерного параметра х.
В
тот момент, когда реакция стенки обратится
в ноль, центр масс не будет иметь
составляющей ускорения (а0)х
вдоль оси абсцисс. Значит, и ускорение
шарика 1
(а1)х
тоже будет равно нулю: они связаны
линейно (а1)х=2(а0)х.
Используя дифференцирование, найдите
критический угол, при котором верхний
шарик отойдет от стенки.
Студент:
Обозначим х=sinα.
Тогда выражение для скорости первого
шарика примет вид:
![]() .
.
Заметим,
что за время падения стержня x(t)
– монотонно убывающая функция.
![]() .
.
Но
выражение dx/dt≠0,
значит, отрыв произойдет при условии
![]() ,
,
х=sinαкр=2/3.
Автор:
– В итоге
мы получили зависимости V1(α)
и V2(α)
при условии, что
α≥
αкр.
Дополнительный
вопрос: можно ли поставить стержень под
некоторым углом φ
к горизонту, чтобы при движении стержня
шарик 2
все же не оторвался от стены?
Студент:
– Будем рассуждать аналогично. Рассмотрим
промежуточное положение стержня, когда
он наклонен под углом α
к горизонту.
Уравнение
кинематической связи не потеряет своей
«силы». А закон сохранения энергии
примет вид:
mg(Lsin
φ
– Lsin α)=mV21/2+
mV22/2
.
Отсюда
находим
V12=2Lgsin2
α(sin φ–
sin α).
Применим
любимый нами безразмерный параметр
х=sinα.
Кроме того, удобно дифференцировать
функцию V12
(х),
т. к. в условиях нашей задачи она
возрастает или убывает вместе с функцией
V1(х),
а вид у нее проще.
f(x)=
V12
(х)=
2Lgx2(sinφ–
x),
df/dx=2Lg(2x
sinφ–3
x2
)=0,
х=(2/3)
sinφ,
sinαкр
=(2/3)
sinφ.
Автор:
– Видим, что
«судьба» шарика 2
предопределена. В любом случае он отойдет
от стены.
Вместо
истории.
Лекция. «В английском языке, – говорит
профессор, – двойное отрицание дает
утверждение. В других языках, например
в русском, двойное отрицание все равно
обозначает отрицание. Но нет ни одного
языка, в котором бы двойное утверждение
обозначало отрицание». Голос с задней
парты: «Ага, конечно».
Насмотревшись
телеигру «Кто хочет стать миллионером»,
Министерство образования и науки
утвердило следующую процедуру приема
экзаменов в вузах России. Экзаменатор
задает студенту 15 вопросов и 4 варианта
ответов. Через каждые 3 вопроса оценка
повышается на балл – от 0 до 5. Имеется
три стандартные подсказки: 50×50, помощь
зала и звонок другу, а также две несгораемые
оценки «1» и «2». Студент в любой момент
может прекратить отвечать на вопросы
и получить ту оценку, на которой он
остановился.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #