Связями называют тела, ограничивающие свободу перемещения рассматриваемого тела.
Реакции связей — это усилия, с которыми связи действуют на данное тело.
Тела в природе бывают свободными и несвободными. Тела, свобода перемещения которых ничем не ограничена, называются свободными.
Одним из основных положений механики является принцип освобождаемости от связей, согласно которому несвободное тело можно рассматривать как свободное, если отбросить действующие на него связи и заменить их силами – реакциями связей.
Очень важно правильно расставить реакции связей, иначе написанные уравнения окажутся неверными.
Рассмотрим реакции связей основных типов, встречающихся при решении задач: гладкой поверхности, ребра, гибкой нити, стержня, шарнирных опор и заделок, а также примеры замены связей их реакциями.
Реакции гладкой поверхности и ребра
Ниже приведены примеры замены связей гладкой поверхности и ребра их реакциями.
На рисунках 1.1–1.8 показаны примеры замены реакциями сил, расположенных в плоскости.
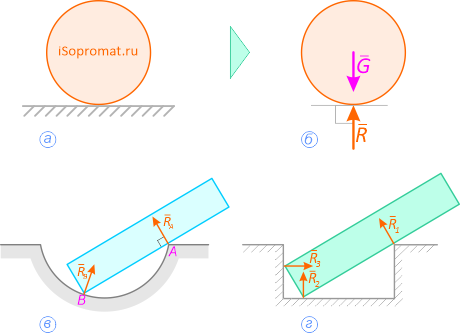
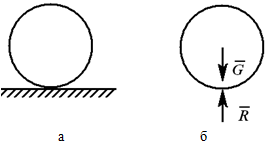
а – тело весом G на гладкой поверхности;
б – действие поверхности заменено реакцией – силой R;
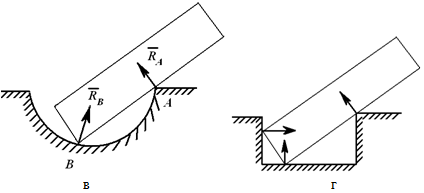
в – в точке А связь «опорная точка» или ребро;
г – реакции направлены перпендикулярно
опираемой или опирающейся плоскостям
Рисунок 1.1
Реакция гладкой поверхности всегда направлена по нормали к этой поверхности (рисунок 1.1).
Реакции связей нити и стержня
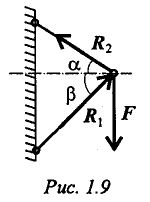
Реакция «невесомого» троса (нити, цепи, стержня) всегда направлена вдоль самого троса (нити, цепи, стержня) (рисунок 1.2).
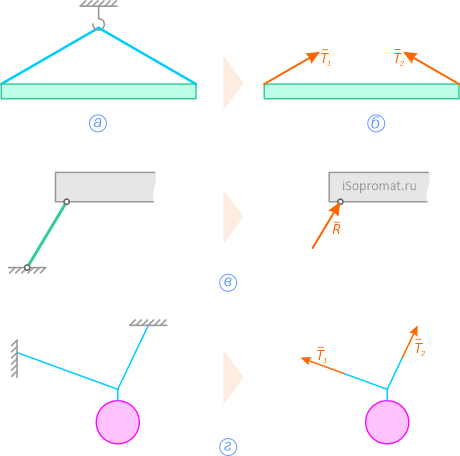
а – балка висит на двух тросах;
б – действие тросов заменено силами Т1 и Т2;
в – связь «идеальный стержень»;
г – связь «идеальная нить»
Рисунок 1.2
Реакции связей шарнирных опор
Шарнирные опоры допускают вращение относительно шарнира, поэтому в них не возникает вращающий момент.
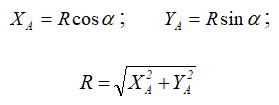
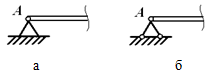
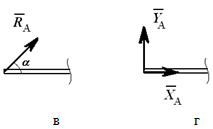
Шарнирно-неподвижная опора может изображаться по-разному (рисунок 1.3,а или 1.3,б). Она может быть заменена либо силой R с углом α (рисунок 1.3,в), либо двумя силами, например, XA и YA (рисунок 1.3,г).

Рисунок 1.3
Всегда можно перейти от R и α к XA и YA (и наоборот):
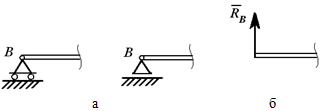
Шарнирно-подвижная опора (рисунок 1.4,а, б, в) допускает (в данном случае) горизонтальное перемещение и не допускает вертикальное.
Реакция R может быть направлена только по нормали к опорной поверхности (рисунок 1.4, г).
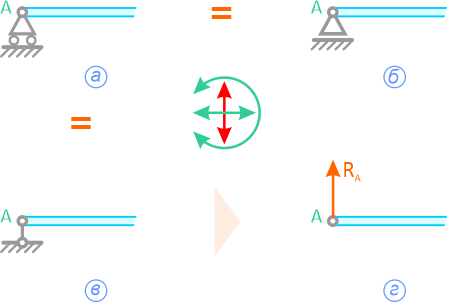
Рисунок 1.4
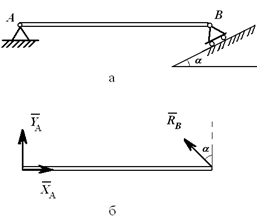
В следующем примере, связи шарнирно-неподвижной опоры в точке A и шарнирно-подвижной опоры в точке B отброшены (рисунок 1.5, б), а их действие заменено силами XA, YA и RB.
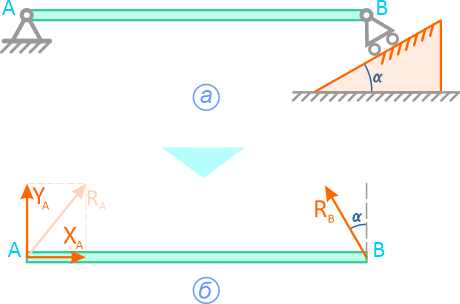
Рисунок 1.5
Подробнее про связи и реакции связей смотрите в нашем видео:
Другие видео
Реакции связи в заделках
Все виды заделок исключают поворот, поэтому в них всегда возникает связь «момент».
Соединение стержня и втулки в плоскости (рисунок 1.6) – скользящая заделка. Отбросив втулку – получаем действие на стержень силы RD и момента MD.
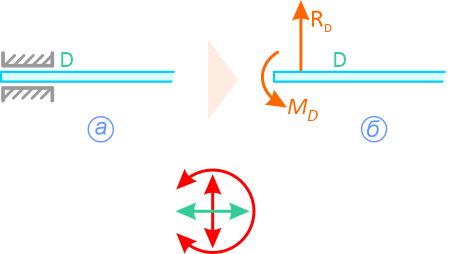
Рисунок 1.6
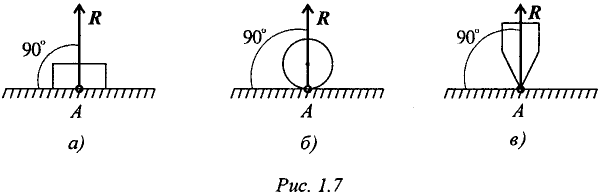
На рисунке 1.7, а изображена бискользящая заделка. В плоскости данная опора допускает поступательное перемещение стержня как по горизонтали, так и по вертикали, но препятствует повороту (в плоскости). Реакцией такой опоры будет только момент MC (рисунок 1.7, б).
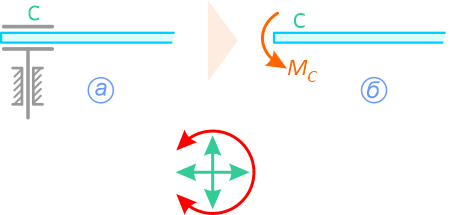
Рисунок 1.7
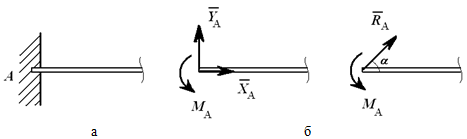
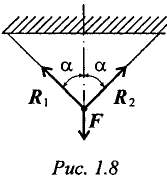
Консоль (глухая или жесткая заделка) не допускает никакого перемещения детали. Реакцией такой опоры являются неизвестная по величине и направлению сила RA с углом α (или XA и YA) и момент ΜA (рисунок 1.8).
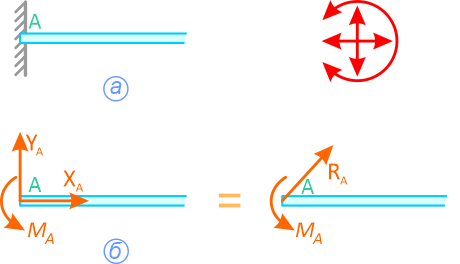
Рисунок 1.8
Реакции пространственных связей
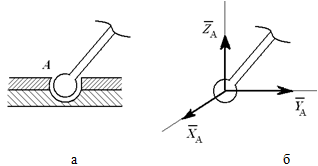
Трехмерная шарнирно-неподвижная опора, или сферический шарнир (рисунок 1.9, а), заменяется системой сил (рисунок 1.9, б) XA, YA и ZA, т.е. силой, неизвестной по величине и направлению.
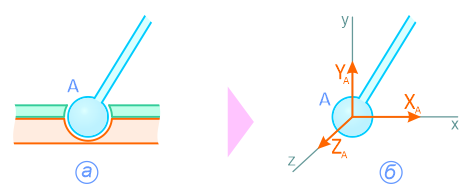
Рисунок 1.9
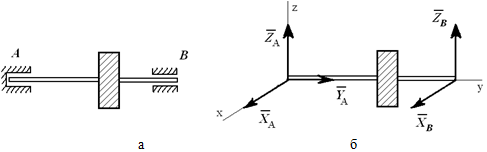
На рисунке 1.10, а показан вал с колесом, закрепленный в опорах: в точке A – подпятник или стакан, в точке B – втулка или подшипник. Действие опор заменено силами XA, YA, ZA и XB, ZB (рисунок 1.10, б).
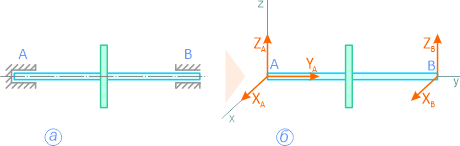
Рисунок 1.10
На следующих рисунках показаны примеры замены различных типов связей их реакциями.
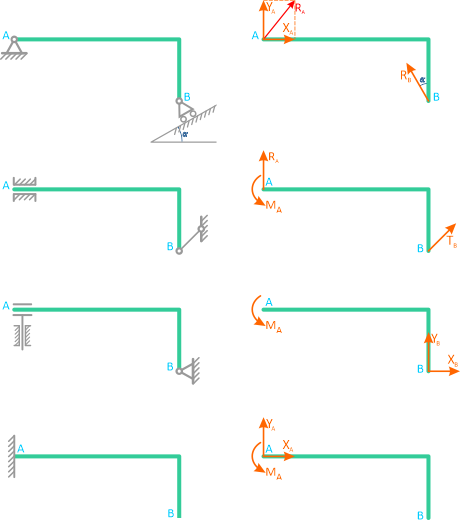
Рисунок 1.11
Трехмерная система удерживаемая в равновесии тремя типами связей: скользящей заделкой, шарнирно неподвижной опорой и тросом.
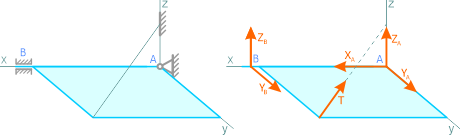
Рисунок 1.12
В общем случае пространственного нагружения, в глухой заделке может возникать до шести реакций связей: три силы и три момента.
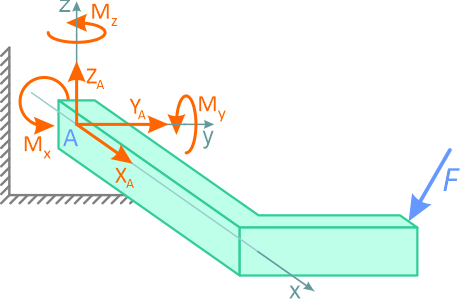
Рисунок 1.13
Величина и истинное направление сил реакций связей определяются из уравнений равновесия рассматриваемой системы.
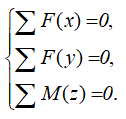
Для плоской системы сил составляется 3 уравнения
Для пространственной системы — до шести уравнений статики.
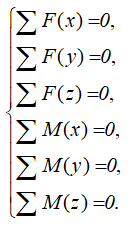
Из которых выражаются и рассчитываются искомые реакции.
Пример определения сил реакций связей
Задача
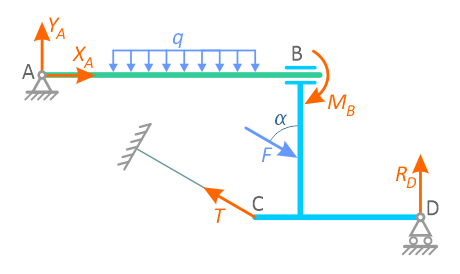
Жесткая рама закреплена в точке A шарнирной связью, а в точке B удерживается в состоянии статического равновесия опорой на катках, с упором в наклонную плоскость под углом 30°.
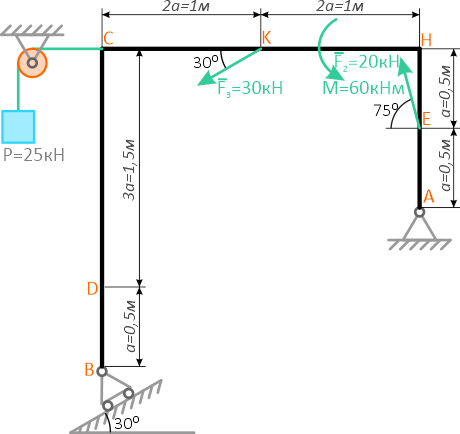
В точке C к раме привязан трос, перекинутый через блок и несущий на конце груз весом P=25кН.
На раму действует пара сил с моментом M=60кНм и две силы F2 и F3 приложенные в точках K и E и расположенные под углами 30° и 75° к горизонтальной оси.
Требуется определить реакции связей в точках A и B, вызываемые заданными действующими нагрузками.
При расчетах, принять размер a=0,5м.
Решение
Рассмотрим равновесие рамной пластины.
Проведем координатные оси x-y и изобразим действующие на пластину внешние нагрузки: силы F, пару сил с моментом M, натяжение троса T (по модулю T=P) и реакции связей XA, YA, RB.
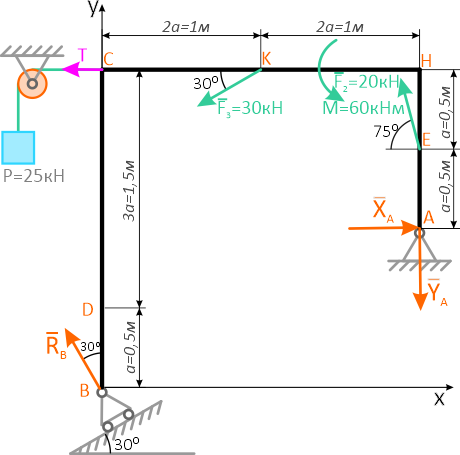
Реакцию неподвижной шарнирной опоры A изображаем двумя составляющими её связями. Реакция на катке направлена перпендикулярно опорной плоскости.
Для полученной плоской системы сил составим три уравнения равновесия системы.
При вычислении моментов сил F относительно точки A воспользуемся теоремой Вариньона, т.е. разложим силы на составляющие Fx=Fcosα и Fy=Fsinα и учтём что mA(F)=mA(Fx)+mA(Fy).
Запишем уравнения сумм проекций сил на оси x и y, а также суммы моментов относительно любой точки системы, например, точки A.
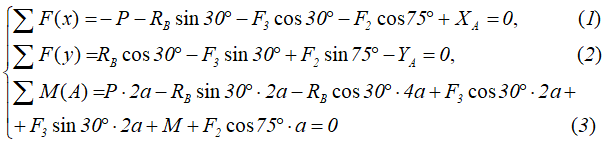
Решая полученную систему уравнений, определяем неизвестные реакции связей катка и шарнирно-неподвижной опоры.
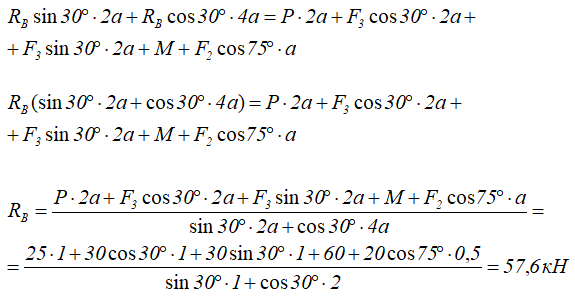
Из уравнения (3) находим реакцию катка
Из уравнения (1) горизонтальную реакцию в точке A

Из уравнения (2) — вертикальную.

Положительные значения найденных реакций говорят о том, что направление связей было выбрано, верно.
Проверку можно выполнить, составив уравнение суммы моментов, в котором будут записаны все искомые реакции, например, относительно точки D:
Ноль, полученный в ответе, означает правильность составления и решения уравнений
Ответ: Получены следующие значения сил реакций связей: в катке RB=57,6кН, в шарнирной опоре XA=84,96кН и YA=54,2кН.
Другие примеры решения задач >
Проекция силы на ось >
Теормех реакции опор связи
Содержание:
Связи и их реакции
По определению, тело, которое может совершать из данного положения любые перемещения в пространство, называется свободным (например, воздушный шар в воздухе). Тело, перемещениям которого в пространстве препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним, тела, называется несвободным.. Все то, что ограничивает перемещения данного тела в пространстве, называют связью. В дальнейшем будем рассматривать связи, реализуемые какими-нибудь телами, и называть связями сами эти тела.
Примерами несвободных тел являются груз, лежащий на столе, дверь, подвешенная на петлях, и т. п. Связями в этих случаях будут: для груза — плоскость стола, не дающая грузу перемещаться по вертикали вниз; для двери — петли, не дающие двери отойти от косяка.
Тело, стремясь под действием приложенных сил осуществить перемещение, которому препятствует связь, будет действовать на нее с некоторой силой, называемой силой давления на связь. Одновременно по закону о равенстве действия и противодействия связь будет действовать на тело с такой же по модулю, но противоположно направленной силой. Сила, с которой данная связь действует на тело, препятствуя тем или иным его перемещениям, называется силой реакции (противодействия) связи или просто реакцией связи.
Значение реакции связи зависит от других действующих сил и наперед неизвестно (если никакие другие силы на тело не действуют, реакции равны нулю); для ее определения надо решить соответствующую задачу механики. Направлена реакция связи в сторону, противоположную той, куда связь не даст перемещаться телу. Когда связь может препятствовать перемещениям тела по нескольким направлениям, направление реакции такой связи тоже наперед неиз—вестно и должно определяться в результате решения рассматриваемой задачи.
Правильное определение направлений реакций связей играет при решении задач механики очень важную роль. Рассмотрим поэтому подробнее, как направлены реакции некоторых основных видов связей.
1. Гладкая плоскость (поверхность) или спора
Гладкой будем называть поверхность, трением о которую данного тела можно в первом приближении пренебречь. Такая

поверхность не дает телу перемещаться только по направлению общего перпендикуляра (нормали) к поверхностям соприкасающихся тел в точке их касания (рис. 8, а) *. Поэтому реакция  гладкой поверхности или опоры направлена по общей нормали к поверхностям соприкасающихся тел в точке их касания и приложена в этой точке. Когда одна из соприкасающихся поверхностей является точкой (рис. 8, б), то реакция направлена по нормали к другой поверхности.
гладкой поверхности или опоры направлена по общей нормали к поверхностям соприкасающихся тел в точке их касания и приложена в этой точке. Когда одна из соприкасающихся поверхностей является точкой (рис. 8, б), то реакция направлена по нормали к другой поверхности.
2. Нить
Связь, осуществленная в виде гибкой нерастяжимой нити (рис. 9), не дает телу  удаляться от точки подвеса нити по направлению
удаляться от точки подвеса нити по направлению  Поэтому реакция
Поэтому реакция  натянутой нити направлена вдоль нити к точке ее подвеса.
натянутой нити направлена вдоль нити к точке ее подвеса.

3. Цилиндрический шарнир
Цилиндрический шарнир (или просто шарнир) осуществляет такое соединение двух тел, при котором одно тело может вращаться по отношению к другому вокруг общей оси, называемой осью шарнира (например, как две половины ножниц). Если тело  прикреплено с помощью такого шарнира к неподвижной опоре
прикреплено с помощью такого шарнира к неподвижной опоре  (рис. 10), то точка
(рис. 10), то точка  тела не может при этом переместиться ни по какому направлению, перпендикулярному оси шарнира. Следовательно, акция
тела не может при этом переместиться ни по какому направлению, перпендикулярному оси шарнира. Следовательно, акция  цилиндрического шарнира может иметь любое направление в плоскости перпендикулярной оси шарнира, т. е. в плоскости
цилиндрического шарнира может иметь любое направление в плоскости перпендикулярной оси шарнира, т. е. в плоскости  Для силы
Для силы  в этом случае наперед неизвестны ни ее модуль
в этом случае наперед неизвестны ни ее модуль  ни направление (угол
ни направление (угол  ).
).
Возможно вам будут полезны данные страницы:
4. Сферический шарнир и подпятник
Тела, соединенные сферическим шарниром, могут как угодно поворачиваться одно относительно другого вокруг центра шарнира. Примером служит прикрепление фотоаппарата к штативу с помощью шаровой пяты. Если тело прикреплено с помощью такого шарнира к неподвижной опоре (рис. 11, а), то точка  тела, совпадающая с центром шарнира, не может при этом совершить никакого перемещения в пространстве. Следовательно, реакция
тела, совпадающая с центром шарнира, не может при этом совершить никакого перемещения в пространстве. Следовательно, реакция  сферического шарнира может иметь любое направление в пространстве. Для нее наперед неизвестны ни ее модуль
сферического шарнира может иметь любое направление в пространстве. Для нее наперед неизвестны ни ее модуль  ни углы с осями
ни углы с осями 
Произвольное направление в пространстве может иметь и реакция  подпятника (подшипника с упором), изображенного на рис. 11,б.
подпятника (подшипника с упором), изображенного на рис. 11,б.

5. Невесомый стержень. Невесомым называют стержень.
весом которого по сравнению с воспринимаемой им нагрузкой можно пренебречь. Пусть для какого-нибудь находящегося в равновесии тела (конструкции) такой стержень, прикрепленный в точках  и
и  шарнирами, является связью (рис. 12, а). Тогда на стержень будут действовать только две силы, приложенные в точках
шарнирами, является связью (рис. 12, а). Тогда на стержень будут действовать только две силы, приложенные в точках  и
и  , при равновесии эти силы должны быть направлены вдоль одной прямой, т. е. вдоль
, при равновесии эти силы должны быть направлены вдоль одной прямой, т. е. вдоль  (см. рис. 4, а, в). Но тогда согласно закону о действии и противодействии стержень будет действовать натело с силой, тоже направленной вдоль
(см. рис. 4, а, в). Но тогда согласно закону о действии и противодействии стержень будет действовать натело с силой, тоже направленной вдоль  . Следовательно, реакция
. Следовательно, реакция  невесомого шарнирно прикрепленного прямолинейного стержня направлена вдоль оси стержня.
невесомого шарнирно прикрепленного прямолинейного стержня направлена вдоль оси стержня.
Если связью является криволинейный невесомый стержень (рис. 12,б), то аналогичные рассуждения приведут к выводу, что его реакция тоже направлена вдоль прямой  соединяющей шарниры
соединяющей шарниры  и
и  (на рис. 12,а направление реакции соответствует случаю, когда стержень сжат, а на рис. 12, б — когда растянут).
(на рис. 12,а направление реакции соответствует случаю, когда стержень сжат, а на рис. 12, б — когда растянут).

При решении задач Рис. 12 реакции связей обычно являются подлежащими определению неизвестными. Нахождение реакций имеет то практическое значение, что определив их, а тем самым определив по закону о действии и противодействии и силы давления на связи, получают исходные данные, необходимые для расчета прочности соответствующих частей конструкции.
Исходные положения статики
При изложении статики можно идти двумя путями:
- 1) исходить из уравнений, которые получаются в динамике как следствия основных законов механики
- 2) излагать статику независимо от динамики исходя из некоторых общих законов механики и положений, называемых аксиомами или принципами статики, хотя по существу они являются не независимыми аксиомами, а следствиями тех же основных законов механики.
В учебных курсах, как и в данном, обычно идут вторым путем, так как по ряду причин оказывается необходимым начинать изучение механики со статики, т. е. до того, как будет изложена динамика. Положения (или аксиомы), из которых при этом исходят, можно сформулировать следующим образом.
- 1. Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю
 и направлены вдоль одной прямой в противоположные стороны (рис. 2).
и направлены вдоль одной прямой в противоположные стороны (рис. 2). - 2. Действие данной системы сил на абсолютно твердое тело не изменяется, если к ней прибавить или от нее отнять уравновешенную систему сил.
 и направлены вдоль одной прямой в противоположные стороны (рис. 2).
и направлены вдоль одной прямой в противоположные стороны (рис. 2). 
Иными словами это означает, что две системы сил, отличающиеся на уравновешенную систему, эквивалентны друг другу.
Следствие: действие силы на абсолютно твердое тело не изменится, если перенести точку приложения сит вдоль ее линии действия в любую другую точку тела.
В самом деле, пусть на твердое тело действует приложенная в точке  сила
сила  (рис. 3). Возьмем на линии действия этой силы произвольную точку
(рис. 3). Возьмем на линии действия этой силы произвольную точку  и приложим в ней две уравновешенные силы
и приложим в ней две уравновешенные силы  и
и  такие, что
такие, что  и
и  От этого действие силы
От этого действие силы  на тело не изменится. Но силы
на тело не изменится. Но силы  и
и  также образуют уравновешенную систему, которая может быть отброшена *.В результате на тело будет действовать только одна сила
также образуют уравновешенную систему, которая может быть отброшена *.В результате на тело будет действовать только одна сила  равная
равная  но приложенная в точке
но приложенная в точке 
Например, изображенный на рис. 4, а стержень  будет находиться в равновесии, если
будет находиться в равновесии, если  При переносе точек приложения обеих сил в какую-нибудьточку
При переносе точек приложения обеих сил в какую-нибудьточку  стержня (рис. 4, б) или при переносе точки приложения силы
стержня (рис. 4, б) или при переносе точки приложения силы  в точку
в точку  а силы
а силы  в точку
в точку  (рис. 4, б) равновесие не нарушается. Однако внутренние усилия будут в каждом из рассматри-ваемых случаев разными. В первом случае стержень под действием приложенных сил растягивается, во втором случае он не напряжен, а в третьем стержень будет сжиматься.
(рис. 4, б) равновесие не нарушается. Однако внутренние усилия будут в каждом из рассматри-ваемых случаев разными. В первом случае стержень под действием приложенных сил растягивается, во втором случае он не напряжен, а в третьем стержень будет сжиматься.
- Следовательно, при определении внутренних усилий переносить точку приложения силы вдоль линии действия нельзя.
Еще два исходных положения относятся к общим законам механики.

Закон параллелограмма сил: две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную в той же точке и изображаемую диагональю параллелограмма, построенного на этих силах, как на сторонах.

Вектор  равный диагонали параллелограмма, построенного на векторах
равный диагонали параллелограмма, построенного на векторах  и
и  (рис. 5), называется геометрической суммой векторов и :
(рис. 5), называется геометрической суммой векторов и :

Следовательно, закон параллелограмма сил можно еще сформулировать так: две силы, приложенные к телу в одной точке, имеют равнодействующую, равную геометрической (векторной) сумме этих сил и приложенную в той же точке.
В дальнейшем следует различать понятия суммы сил и их равнодействующей. Поясним это примером. Рассмотрим две силы и (рис. 6), приложенные к телу в точках  и
и  Показанная на рис. 6 сила
Показанная на рис. 6 сила  равна геометрической сумме сил и
равна геометрической сумме сил и  как диагональ соответствующего параллелограмма. Но сила
как диагональ соответствующего параллелограмма. Но сила  не является равнодействующей этих сил, так как нетрудно понять, что одна сила
не является равнодействующей этих сил, так как нетрудно понять, что одна сила  не может заменить действие сил и на данное тело, где бы она ни была приложена. В дальнейшем будет еще строго доказано (§29, задача 38), что эти две силы не имеют равнодействующей.
не может заменить действие сил и на данное тело, где бы она ни была приложена. В дальнейшем будет еще строго доказано (§29, задача 38), что эти две силы не имеют равнодействующей.
Закон равенства действия и противодействия: при всяком действии одного материального тела на другое имеет место такое же численно, но противоположное по направлению противодействие.
Этот закон является одним из основных законов механики. Из него следует, что если тело  действует на тело
действует на тело  с некоторой силой
с некоторой силой  то одновременно тело
то одновременно тело  действует на тело с такой же по модулю и направленной вдоль той же прямой, но в противоположную сторону силой
действует на тело с такой же по модулю и направленной вдоль той же прямой, но в противоположную сторону силой  (рис. 7). Заметим, что силы
(рис. 7). Заметим, что силы  и
и  как приложенные к разным телам, не образуют уравновешенную систему сил.
как приложенные к разным телам, не образуют уравновешенную систему сил.

Свойство внутренних сил. Согласно данному закону при взаимодействии две любые части тела (или конструкции) действуют друг на друга с равными по модулю и противоположно направленными силами. Так как при изучении условий равновесия тело рассматривается как абсолютно твердое, то все внутренние силы образуют при этом уравновешенную систему сил, которую можно отбросить. Следовательно, при изучении условий равновесия тела (конструкции) необходимо учитывать только внешние силы, действующие на это тело (конструкцию). В дальнейшем, говоря о действующих силах, мы будем подразумевать, если не сделано специальной оговорки, что речь идет только о внешних силах.
- Еще одним исходным положением является принцип отвердевания: равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если тело считать отвердевшим (абсолютно твердым).
Высказанное утверждение очевидно. Например, ясно, что равновесие цепи не нарушится, если ее звенья считать сваренными друг с другом. Так как на покоящееся тело до и после отвердевания действует одна и та же система сил, то данный принцип можно еще высказать в такой форме: при равновесии силы, действующие на любое изменяемое (деформируемое) тело или изменяемую конструкцию, удовлетворяют тем же условиям, что и для тела абсолютно твердого; однако для изменяемого тела эти условия, будучи необходимыми, могут не быть достаточными.
Например, для равновесия гибкой нити под действием двух сил, приложенных к ее концам, необходимы те же условия, что и для жесткого стержня (силы должны быть равны по модулю и направлены вдоль нити в разные стороны). Но эти условия не будут достаточными. Для равновесия нити требуется еще, чтобы приложенные силы были растягивающими, т. е. направленными так, как на рис. 4, а.
Принцип отвердевания широко используется в инженерных расчетах. Он позволяет при составлении условий равновесия рассматривать любое изменяемое тело (ремень, трос, цепь и т. п.) или любую изменяемую конструкцию как абсолютно жесткие и применять к ним методы статики твердого тела. Если полученных таким путем уравнений для решения задачи оказывается недостаточно, то дополнительно составляют уравнения, учитывающие или условия равновесия отдельных частей конструкции, или их деформации (задачи, требующие учета деформаций, решаются в курсе сопротивления материалов).
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Услуги по теоретической механике:
Присылайте задания в любое время дня и ночи в ➔ 
Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
iSopromat.ru

Связями называют тела, ограничивающие свободу перемещения рассматриваемого тела.
Реакции связей — это усилия, с которыми связи действуют на данное тело.
Тела в природе бывают свободными и несвободными. Тела, свобода перемещения которых ничем не ограничена, называются свободными.
Одним из основных положений механики является принцип освобождаемости от связей, согласно которому несвободное тело можно рассматривать как свободное, если отбросить действующие на него связи и заменить их силами – реакциями связей.
Подробнее про связи и реакции связей смотрите в нашем видео:

Очень важно правильно расставить реакции связей, иначе написанные уравнения окажутся неверными. Ниже приведены примеры замены связей их реакциями. На рисунках 1.1–1.8 показаны примеры замены реакциями сил, расположенных в плоскости.
Реакция гладкой поверхности всегда направлена по нормали к этой поверхности (рисунок 1.1). Реакция «невесомого» троса (нити, цепи, стержня) всегда направлена вдоль троса (нити, цепи, стержня) (рисунок 1.2).

Шарнирно-неподвижная опора может изображаться по-разному (рисунок 1.3, а или 1.3, б). Она может быть заменена либо силой R с углом α (рисунок 1.3, в), либо двумя силами, например, XA и YA (рисунок 1.3, г).
Всегда можно перейти от R и α к XA и YA (и наоборот):

Шарнирно-подвижная опора (рисунок 1.4, а) допускает (в данном случае) горизонтальное перемещение и не допускает вертикальное. Реакция направлена по нормали к опорной поверхности (рисунок 1.4, б).
Связи шарнирно-неподвижной опоры в точке A и шарнирно-подвижной опоры в точке B отброшены (рисунок 1.5, б), их действие заменено силами XA, YA и RB.
Соединение стержня и втулки в плоскости (рисунок 1.6) – скользящая заделка. Отбросим втулку – получим действие на стержень силы RD и момента MD.

На рисунке 1.7, а изображена бискользящая заделка. В плоскости данная опора допускает поступательное перемещение стержня как по горизонтали, так и по вертикали, но препятствует повороту (в плоскости). Реакцией такой опоры будет момент MC (рисунок 1.7, б).

Консоль (глухая или жесткая заделка) не допускает никакого перемещения детали. Реакцией такой опоры являются неизвестная по величине и направлению сила RA с углом α (или XA и YA) и момент ΜA (рисунок 1.8).
На рисунках 1.9 – 1.15 показаны примеры замены сил, расположенных в пространстве, их реакциями.
Шарнирно-неподвижная опора, или сферический шарнир (рисунок 1.9, а), заменена системой сил (рисунок 1.9, б) XA, YA и ZA, т.е. силой, неизвестной по величине и направлению.
На рисунке 1.10, а показан вал, закрепленный в опорах: в точке A – подпятник или стакан, в точке B – втулка или подшипник. Действие опор заменено силами XA, YA, ZA и XB, ZB (рисунок 1.10, б).
На рисунках 1.11 и 1.12 приведены примеры замены различных связей их реакциями.
Связи и реакции связей

Связи и реакции связей
Все законы и теоремы статики справедливы для свободного твердого тела.
Все тела делятся на свободные и связанные.
Свободные тела — тела, перемещение которых не ограничено.
Связанные тела — тела, перемещение которых ограничено другими телами.
Тела, ограничивающие перемещение других тел, называют связями.
Силы, действующие от связей и препятствующие перемещению, называют реакциями связей.
Реакция связи всегда направлена с той стороны, куда нельзя перемещаться.
Всякое связанное тело можно представить свободным, если связи заменить их реакциями (принцип освобождения от связей). Все связи можно разделить на несколько типов.
Связь — гладкая опора (без трения)
Реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре (рис. 1.7).
Гибкая связь (нить, веревка, трос, цепь)
Груз подвешен на двух нитях (рис. 1.8).
Реакция нити направлена вдоль нити от тела, при этом нить может быть только растянута.
Жесткий стержень
На схемах стержни изображают толстой сплошной линией (рис. 1.9).
Стержень может быть сжат или растянут. Реакция стержня направлена вдоль стержня. Стержень работает на растяжение или сжатие. Точное направление реакции определяют, мысленно убрав стержень и рассмотрев возможные перемещения тела без этой связи.
Возможным перемещением точки называется такое бесконечно малое мысленное перемещение, которое допускается в данный момент наложенными на него связями.
Убираем стержень 1, в этом случае стержень 2 падает вниз. Следовательно, сила от стержня 1 (реакция) направлена вверх. Убираем стержень 2. В этом случае точка  опускается вниз, отодвигаясь от стены. Следовательно, реакция стержня 2 направлена к стене.
опускается вниз, отодвигаясь от стены. Следовательно, реакция стержня 2 направлена к стене.
Шарнирная опора
Шарнир допускает поворот вокруг точки закрепления. Различают два вида шарниров.
Подвижный шарнир
Стержень, закрепленный на шарнире, может поворачиваться вокруг шарнира, а точка крепления может перемещаться вдоль направляющей (площадки) (рис. 1.10).
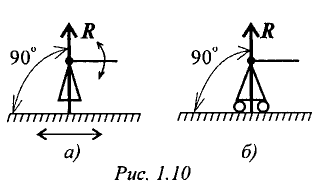
Реакция подвижного шарнира направлена перпендикулярно опорной поверхности, т. к. не допускается только перемещение поперек опорной поверхности.
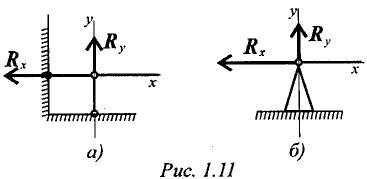
Неподвижный шарнир
Точка крепления перемешаться не может. Стержень может свободно поворачиваться вокруг оси шарнира. Реакция такой опоры проходит через ось шарнира, но неизвестна по направлению. Ее принято изображать в виде двух составляющих: горизонтальной и вертикальной  (рис. 1.11).
(рис. 1.11).
Защемление или «заделка»
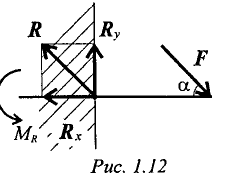
Любые перемещения точки крепления невозможны.
Под действием внешних сил в опоре возникают реактивная сила и реактивный момент  , препятствующий повороту (рис. 1.12).
, препятствующий повороту (рис. 1.12).
Реактивную силу принято представлять в виде двух составляющих вдоль осей координат
Эта теория взята со страницы решения задач по предмету «техническая механика»:
Возможно эти страницы вам будут полезны:



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
http://lfirmal.com/svyazi-i-reaktsii-svyazej-v-tehnicheskoj-mehanike/
Привет! В этой статье предлагаю поговорить о реакциях опор, еще известных как опорные реакции. Для успешного освоения курса – «сопротивление материалов», каждый студент должен уметь определять реакции опор, чему учат еще в рамках дисциплины — «теоретическая механика». Но для тех, кто проспал механику на первом курсе, я подготовил данную статью, чтобы каждый желающий мог приобрести навыки по расчету опорных реакций.
Так как этот урок для чайников, я многие моменты буду упрощать и рассказывать только самое основное, чтобы написанное здесь, было понятно даже самому неподготовленному студенту — заочнику.
В рамках статьи рассмотрим 4 примера: двухопорная балка, загруженная посередине пролёта сосредоточенной силой, такая же балка, но загруженная распределённой нагрузкой, консольная балка и плоская рама.
Что такое реакция опоры?
Чтобы лучше понять, что такое реакция опоры (опорная реакция), давай рассмотрим следующий пример — балку (стержень) лежащую на опорах:

На балку давит нагрузка – сила, в свою очередь, балка давит на опоры. И чтобы балка лежала на опорах (никуда не проваливалась), опоры выполняют свою основную функцию — удерживают балку. А чтобы удерживать балку, опоры должны компенсировать тот вес, с которым балка давит на них. Соответственно, действие опор можно представить в виде некоторых сил, так называемых — реакций опор.

Для балки, и нагрузка, и реакции опор, будут являться внешними силами, которые нужно обязательно учитывать при расчёте балки. А чтобы учесть опорные реакции, сначала нужно научиться определять их, чем, собственно, и займёмся на этом уроке.
Виды связей и их реакции
Связи – это способы закрепления элементов конструкций. Опоры, которые я уже показывал ранее – это тоже связи.
В этой статье будем рассматривать три вида связей: жёсткая заделка, шарнирно-подвижная и шарнирно-неподвижная опора.
Жёсткая заделка

Жёсткая заделка — это один из вариантов закрепления элементов конструкций. Этот тип связи препятствует любым перемещениям, тем самым для плоской задачи, может возникать три реакции: вертикальная (RA), горизонтальная (HA) и момент (MA).

Шарнирно-подвижная и шарнирно-неподвижная опора
В этой статье будем работать с двумя типами опор: шарнирно-подвижной и шарнирно-неподвижной.

В шарнирно-неподвижной опоре возникает две реакции: вертикальная и горизонтальная. Так как опора препятствует перемещению в этих двух направлениях. В шарнирно-подвижной опоре возникает только вертикальная реакция.

Однако, видов связей и их условных обозначений достаточно много, но в рамках этой статьи их все рассматривать не будем. Так как, изученные ранее виды связей, являются основными и практически всегда, при решении задач по сопромату, ты будешь сталкиваться именно с ними.
Что такое момент силы?
Также необходимо разобраться с понятием момент силы.
Момент силы — это произведение силы на плечо. Где плечо — это кратчайшее расстояние от точки до силы, то есть перпендикуляр.
Проиллюстрирую написанное:

Правило знаков для моментов
Также для моментов, нужно задаться каким-то правилом знаков. Я в своих уроках буду придерживаться такого правила:
- если сила относительно точки стремится повернуть ПРОТИВ часовой стрелки, то момент положительный;
- если она стремится повернуть ПО часовой стрелке, то момент отрицательный.

Всю подготовительную информацию дал, теперь будем рассматривать конкретные примеры. И начнём с простейшей расчётной схемы балки.
Определение реакций для двухопорной балки
Возьмём балку, загруженную посередине сосредоточенной силой и опирающейся на шарнирно-неподвижную и шарнирно-подвижную опору:

Введём систему координат: направим ось x вдоль балки, а ось y вертикально. Обозначим реакции в опорах как HA, RA и RB:

Для тех, кто пришёл сюда, ещё будучи на этапе изучения теоретической механики, а я знаю, таких будет много, важно отметить, что в сопромате не принято указывать знаки векторов над силами.
В термехе же, в обязательном порядке, преподаватель от тебя настойчиво будет требовать указывать знак вектора над всеми силами, вот так:

Условия равновесия системы
Чтобы найти все реакции, нужно составить и решить три уравнения — уравнения равновесия:

Данные уравнения являются условиями равновесия системы. А так как мы предполагаем, что опоры обеспечивают это состояние равновесия (удерживают балку). То составив и решив уравнения равновесия — найдём значения опорных реакций.
Первое уравнение называется уравнением проекций — суммой проекций всех сил на координатную ось, которая должна быть равна нулю. Два других уравнения называются уравнениями моментов — суммами моментов всех сил относительно точек, которые должны быть равны нулю.
Уравнения равновесия
Как видишь, чтобы научиться находить реакции опор, главное — научиться правильно составлять уравнения равновесия.
Уравнение проекций
Запишем первое уравнение — уравнение проекций для оси x.
В уравнении будут участвовать только те силы, которые параллельны оси x. Такая сила у нас только одна — HA. Так как HA направлена против положительного направления оси x, в уравнение её нужно записать с минусом:
Тогда HA будет равна:
Поздравляю, первая реакция найдена!
Уравнения моментов
А теперь самое интересное…запишем уравнение моментов, относительно точки A, с учётом ранее рассмотренного правила знаков для моментов.
Так как сила F поворачивает ПО часовой стрелке, записываем её со знаком «МИНУС» и умножаем на плечо.
Так как сила RB поворачивает ПРОТИВ часовой стрелки, пишем её со знаком «ПЛЮС» и умножаем на плечо. И, наконец, всё это приравниваем к нулю:
Из полученного уравнения выражаем реакцию RB:

Вторая реакция найдена! Третья реакция находится аналогично, но только теперь уравнение моментов записываем относительно другой точки:

Проверка правильности найденных опорных реакций
Чем хороши задачи на определение реакций, так это тем, что правильность расчёта реакций легко проверить. Для этого достаточно составить дополнительное уравнение равновесия, подставить все численные значения и если сумма проекций сил или сумма моментов будет равна нулю, то и реакции, значит, найдены — верно, а если нет, то ищем ошибку.
Составим дополнительное уравнение проекций для оси y и подставим все численные значения:
Как видишь, реакции опор найдены правильно.
Определение реакций опор для балки с распределенной нагрузкой
Теперь рассмотрим балку, загруженную распределенной нагрузкой:

Перед тем как посчитать реакции опор, распределенную нагрузку нужно «свернуть» до сосредоточенной силы. Если умножить интенсивность q на длину участка, на которой действует нагрузка, получим силу Q. Сила Q будет находиться ровно посередине балки, как и сила F в нашем первом примере:

Подробно комментировать нахождение реакций в опорах здесь, не буду. Просто приведу решение:



Расчёт реакций для консольной балки
Давай рассмотрим теперь пример с жёсткой заделкой – консольную балку. Заодно посмотрим, как учесть силу, приложенную под углом (α = 30°).

Силу, направленную под определённым углом, нужно разложить на две составляющие – горизонтальную и вертикальную. А их значения найти из силового треугольника:


Покажем реакции в заделке и выполним расчёт:

Для этой задачи выгоднее использовать другую форму условий равновесия:

А выгодна она тем, что из каждого записанного уравнения будем сразу находить реакцию:

Не пугайся отрицательного значения реакции! Это значит, что при указании реакции, мы не угадали с её направлением. Расчёт же показал, что MA, направлена не по часовой стрелке, а против.
В теоретической механике, когда реакции получают с «минусом» обычно не заморачиваются и не меняют их направление на схеме, так и оставляют в ответе отрицательное значение, оговаривая, что да реакция найдена, но с учётом знака, на самом деле направлена в другую сторону. Потому что найденные реакции в задачах на статику, являются конечной точкой расчёта.
У нас же, в сопромате после нахождения опорных реакций, всё только начинается. Найдя реакции, мы всего лишь находим ВСЕ силы действующие на элемент конструкции, а дальше по сценарию стоит задача определить внутренние усилия, возникающие в этом элементе, расчёты на прочность и т. д. Поэтому на схеме, обязательно следует указывать истинное направление реакций. Чтобы потом, когда будут рассчитываться внутренние усилия ничего не напутать со знаками.
Если получили отрицательное значение, нужно отразить это на схеме:

С учётом изменений на схеме реакция будет равна:
Сделаем проверку, составив уравнение равновесие, ещё не использованное – сумму моментов относительно, скажем, точки B, которая, при правильном расчёте, конечно, должна быть равна нулю:
![]()
Если не менять направление реакции, то в проверочном уравнении нужно учесть этот «минус»:

Можешь посмотреть еще один пример, с похожей схемой, для закрепления материала, так сказать.
Реакции опор для плоской рамы
Теперь предлагаю выполнить расчёт плоской рамы. Для примера возьмём расчётную схему, загруженную всевозможными видами нагрузок:

Проводим ряд действий с расчетной схемой рамы:
- заменяем опоры на реакции;
- сворачиваем распределенную нагрузку до сосредоточенной силы;
- вводим систему координат x и y.

Выполняем расчёт реакций опор:


Меняем направление реакции RA:

В итоге получили следующие реакции в опорах рамы:

Осталось проверить наши расчеты! Для этого предлагаю записать уравнение моментов, относительно точки B. И если, эта сумма будет равна нулю, то расчет выполнен верно:

Как видим, расчет реакций выполнен правильно!
Связи и их реакции
Тело, перемещению
которого в пространстве препятствует
какие-нибудь другие тела, скрепленные
или соприкасающиеся с данным, называется
несвободным.
Все то, что ограничивает перемещение
данного тела в пространстве, называется
связями.
Пример. Груз висит
на веревке, ящик стоит на полу и т.д.
Сила, с которой
данная связь действует на тело, препятствуя
тем или иным его перемещениям, называется
силой реакции
(противодействия) связи
или просто
реакцией связи.
Силы, приложенные
к телу, но не являющиеся реакциями,
называются активными.
Направление силы
реакции связи противоположно той, куда
связь не дает перемещаться телу.
Направления реакций некоторых основных видов связи
1. Гладкая поверхность
Р еакция
еакция
связиN
гладкой поверхности или опоры направлена
по нормали к поверхностям соприкасающихся
тел в точке касания и приложена в этой
точке.
а) б) в)
Рис. 1.5
Если одна из
соприкасающихся поверхностей является
точкой, то реакция направлена по нормали
к другой поверхности (рис. 1.5).
2. Нить, стержень.
Р

 еакция
еакция
Т натянутой нити и нагруженного стержняS
направлена вдоль этих связей и приложена
в точке контакта (рис. 1.6).
а) б)
Рис. 1.6
3 .
.
Цилиндрический шарнир (подшипник,
петля).
Р

 еакцияR
еакцияR
цилиндрического шарнира лежит в
плоскости, перпендикулярной оси шарнира,
и может иметь любое направление в этой
плоскости. Для определения R
ее раскладывают на два взаимноперпендикулярных
направления: Rx
и Ry
(рис. 1.7).
Рис. 1.7
4 .
.
Подвижная шарнирная опора.
Р еакция
еакция
связиR
направлена перпендикулярно плоскости
возможного перемещения шарнира (рис.
1.8).
5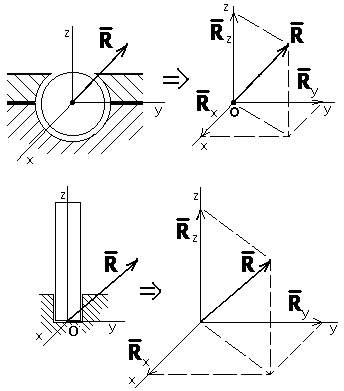
Рис. 1.8
а)
б)
Рис. 1.9
. Шаровый шарнир и подпятник (рис.
1.9, рис. 1.10).
а) б)
Рис. 1.10
Р еакция
еакция
шарового шарнира и подпятника может
иметь любое направление в пространстве.
А
Рис. 1.11
а)
б)
ксиома связей. Всякое
несвободное тело можно рассматривать
как свободное, если отбросить связи и
заменить их действие реакциями этих
связей (рис. 1.11).

Сложение сил
Геометрический
способ сложения сил
В
а)
б)
Рис. 1.12
еличина, равная геометрической
сумме сил какой-либо системы называется
главным вектором этой системы сил.
П


 усть
усть
на твердое тело действует плоская
система сил (F1,
F2,
F3,
…, Fn)
(рис. 1.12).
И

 з
з
произвольно выбранной точки О откладывается
векторF1,
из его конца откладывается вектор F2
и т.д. Вектор R,
замыкающий силовой многоугольник,
является результирующим:
![]()
Сложение двух сил
Пусть на тело
действуют две силы, лежащие в одной
плоскости (рис. 1.13).
![]()

![]() .
.
Р
Рис. 1.13
езультирующая сила определяется
по правилу параллелограмма, модуль силы
определяется по теореме косинусов или
синусов:
![]() ;
; ![]() .
.
Сложение трех
сил не лежащих в одной плоскости
Р ассмотрим
ассмотрим
три силы![]() ,
,![]() ,
,![]() не лежащие в одной плоскости (рис. 1.14).
не лежащие в одной плоскости (рис. 1.14).
Результирующая сила![]() равна:
равна:
![]() .
.
Направление силы
определим по направляющим косинусам:
![]()
Рис. 1.14
;
![]() ;
;
![]() .
.
Разложение сил
Разложение сил
по двум заданным направлениям
П
 усть
усть
надо силуF
разложить по направлениям AB
и AD
(рис. 1.15).
![]()
Рис. 1.15
.
Задача сводится
к построению параллелограмма, у которого
стороны расположены по направлениям
AB
и AD
и данная сила F
является диагональю. Тогда стороны
параллелограмма будут искомыми силами.
Разложение сил
по трем заданным направлениям.

П
Рис. 1.16
усть направления силы не лежат в
одной плоскости. Тогда задача сводится
к построению параллелепипеда, у которого
диагональю является данная сила, а ребра
параллельны заданным направлениям
(рис. 1.16).
![]() .
.
Вопросы для
самоконтроля
-
Что изучает
статика? -
Что такое абсолютно
твердое тело? -
Основные виды
связей и их реакции? -
Геометрическое
сложение сил?
Задачи, рекомендуемые
для самостоятельного решения: 1.1 – 1.6
[2]
Литература: [1],
[3],
[4].
Лекция 2.
Действия над
силами. Система сходящихся сил

Проекция силы
на ось и на плоскость
П роекция
роекция
силы на ось.
Пусть сила F
образует с осью OX
угол
(рис. 2.1), тогда проекция этой силы на ось
будет:
Fx
= Fcos.
П
Рис. 2.1
роекция силы на ось есть величина
скалярная.
П

 роекция
роекция
силы на плоскость.
Проекцией силы F
на плоскость OXY
называется вектор Fxy
= OB1,
заключенный между проекциями начала и
конца силы F
на эту плоскость (рис. 2.2.)
П

Рис. 2.2
роекция силы на плоскость есть
величина векторная, так как она кроме
численного значения характеризуется
направлением на плоскости. По модулюFxy
= Fcos,
где
— угол между направлением силы F
и ее проекцией Fxy.
А налитический
налитический
способ задания сил.
Для аналитического способа задания
силы необходимо выбрать систему координат
OXYZ
и спроектировать силу на оси координат
(рис. 2.3).
Направляющие
косинусы определяются по формулам:
![]()
![]()
Рис. 2.3
;
![]()
;
![]() .
.
![]() .
.
Для плоской системы
сил:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Соседние файлы в папке 3й курс 5 семестр
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #