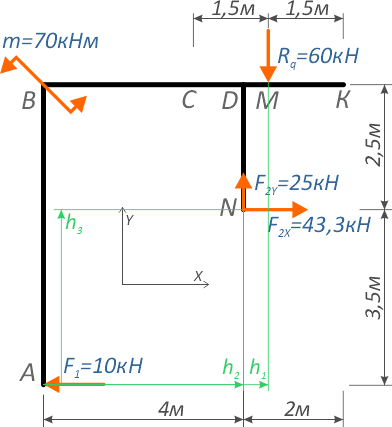
Рассмотрим решение задачи по составлению и определению суммы моментов внешних сил приложенных к заданной системе относительно её точек.
Задача
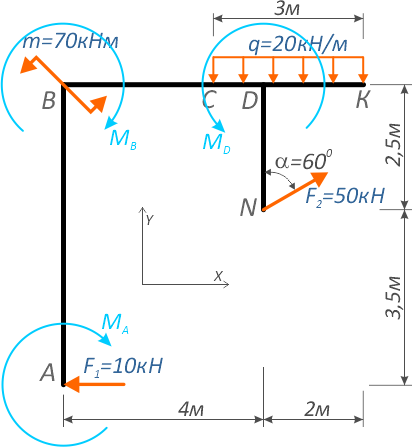
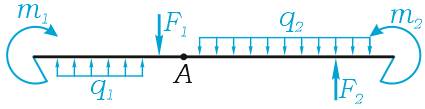
К составной планке, показанной на рисунке
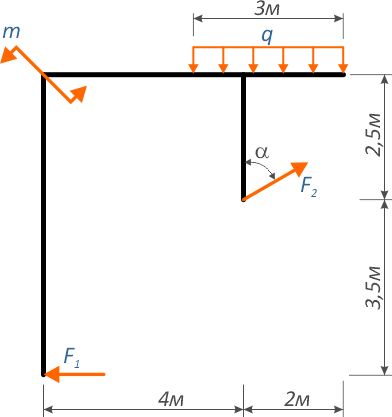
приложены следующие нагрузки:
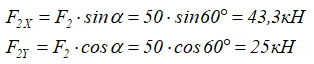
- Внешние сосредоточенные силы F1=10кН и F2=50кН расположенная под углом
- Сосредоточенный момент m=70кНм
- Равномерно-распределённая нагрузка q интенсивностью 20кН/м
Требуется составить и определить алгебраическую сумму моментов относительно точек A, B и D.
Решение
Обозначим характерные точки системы буквами и покажем систему координат x-y.
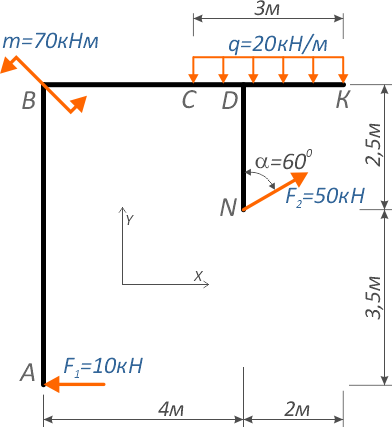
Для записи и расчета уравнений суммы моментов надо мысленно закрепить систему в рассматриваемой точке и записать все внешние усилия, которые стремятся повернуть систему.
Момент силы определяется по формуле
![]()
где h — расстояние от точки до линии действия силы называемое плечом.
Другие видео
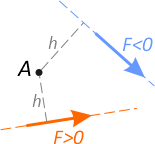
При этом, по правилу знаков, нагрузки, поворачивающие систему против хода часовой стрелки записываются положительными и наоборот.
При записи уравнений суммы моментов:
- Силы умножаются на плечо;
- Равномерно распределенные нагрузки умножаются на длину (получается равнодействующая сила), полученное произведение умножается на плечо, которым служит расстояние от её середины до рассматриваемой точки;
- Сосредоточенный момент в сумме моментов записывается как есть (с учётом знака).
Примеры составления суммы моментов сил
Определим алгебраические суммы моментов сил относительно произвольных точек системы.
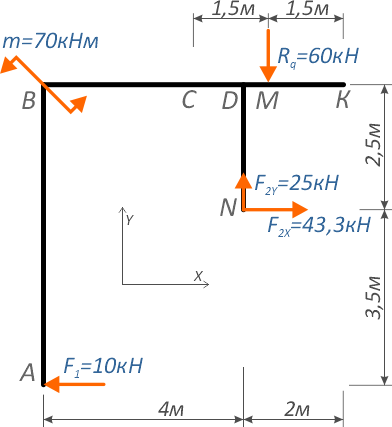
Для некоторого упрощения решения задачи, распределенную нагрузку можно заменить её равнодействующей
![]()
которая при равномерном распределении приложена посередине:
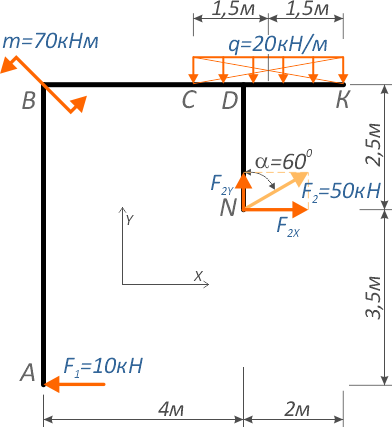
а сосредоточенную силу F2 можно разложить на составляющие, спроецировав её на оси x и y.
Получается упрощенная расчетная схема:
Расчет суммы моментов относительно точки, к которой приложена сила
Для точки A:
Силы Rq и F2X создают момент, вращающий по ходу часовой стрелки, поэтому будут записаны со знаком минус.
Сила F2Y относительно точки A имеет обратное направление и создает положительный момент.
Здесь h1, h2 и h3 плечи моментов соответствующих сил и равнодействующей распределенной нагрузки относительно точки A.
Линия действия силы F1 проходит через саму точку A, следовательно, плечо равно нулю, поэтому момент этой силой в данном случае не создается.
Таким образом, относительно точки A уравнение суммы моментов будет иметь вид:
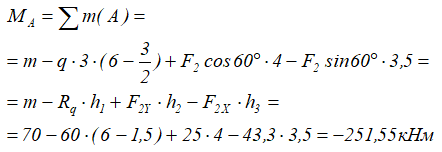
Здесь сумма моментов относительно точки A отрицательна, поэтому, если данную систему закрепить в этой точке, она будет вращаться по ходу часовой стрелки.
Определение суммы моментов относительно точки, в которой приложен момент
Для точки B надо помнить что момент приложенный в точке, относительно которой записывается сумма, в уравнении участвует.
Поэтому алгебраическая сумма моментов относительно точки B равна:
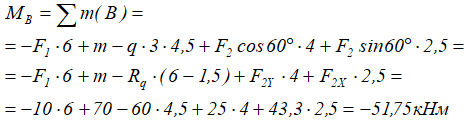
Знак «-» так же показывает на вращение системы по ХЧС.
Сумма моментов относительно точки, где действует распределенная нагрузка
Для точки D:
Здесь надо смотреть, как расположена равнодействующая нагрузки по отношению к рассматриваемой точке.
В данном случае она находится справа от точки и направлена вниз, следовательно, создает вращение по ходу часовой стрелки.
Плечом момента нагрузки служит расстояние между равнодействующей и точкой.
Уравнение суммы моментов для точки под распределенной нагрузкой (в точке D) запишется в виде:
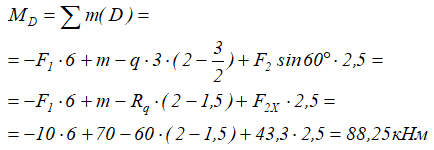
Положительный результат показывает вращение системы против ХЧС.
Направления определенных сумм моментов относительно заданных точек
При определении суммы моментов следует помнить, что в отличие от сил и распределенных нагрузок, сосредоточенный момент будет иметь один и тот же знак относительно любой точки системы.
Уравнения суммы моментов можно составить относительно любых других точек системы, в том числе точек, которые лежат вне заданной системы. Но, как правило, при решении задач этого не требуется.
Для статичных, геометрически неизменяемых систем сумма моментов всегда равна нулю.
Другие примеры решения задач статики >
iSopromat.ru

Правила знаков для моментов и проекций сил на оси координат:
Правило знаков проекций сил
То есть, для уравнений сумм проекций сил на оси:
Проекции сил и нагрузок на координатную ось имеющие одинаковое направление принимаются положительными, а проекции усилий противоположного направления – отрицательными.

Например, для такой схемы нагружения:
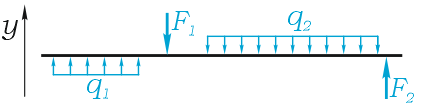
уравнение суммы сил имеет вид

А так как суммы проекций разнонаправленных сил равны, то данное уравнение можно записать и так:

Здесь F(q) – равнодействующая от распределенной нагрузки, определяемая произведением интенсивности нагрузки на ее длину.
Правило знаков для моментов
Сосредоточенные моменты и моменты сил стремящиеся повернуть систему относительно рассматриваемой точки по ходу часовой стрелки записываются в уравнения с одним знаком, и соответственно моменты, имеющие обратное направление с противоположным знаком.
Например, для суммы моментов относительно точки A

или, что одно и то же

Здесь m(F) – моменты сил F относительно точки A.
M(q) – моменты распределенных нагрузок q относительно рассматриваемой точки.
При составлении уравнений статики для систем находящихся в равновесии (например при определении опорных реакций) правила знаков могут быть упрощены до следующего вида:
Нагрузки направленные в одну сторону принимаются положительными, а соответственно, нагрузки обратного направления записываются со знаком минус.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Как определить реакции в опорах?
Привет! В этой статье, предлагаю поговорить о реакциях опор, еще известных как опорные реакции. Для успешного освоения курса – «сопротивление материалов», каждый студент должен уметь определять реакции в опорах, и этому уделяют особое внимание на термехе. А курс термеха, по традиции, читают до сопромата. Для тех, кто проспал механику на первом курсе, я подготовил данную статью, чтобы каждый желающий мог приобрести навыки по расчету опорных реакций.

Что такое реакция опоры?
Реакция опоры – это та сила, которая возникает в опоре от действия внешней нагрузки. В зависимости от конструкции опоры и ее назначения, в ней может появляться разное количество реакций, это может быть как сила, так и момент.
В начале этой статьи, расскажу о том, что должен уже уметь читатель, для успешного освоения данного урока. Если у Вас есть проблемы по поднятым вопросам на старте статьи, переходите по ссылкам на другие материалы на нашем сайте, после чего возвращайтесь к нам на чай реакции. Во второй части статьи, посмотрим, как вычисляются реакции на простейшем примере – балки, загруженной по центру сосредоточенной силой. Тут я покажу, как пользоваться уравнениями равновесия статики, как их правильно составлять. Дальше по плану, научу учитывать распределенную нагрузку, на примере той же балки. И завершать данный урок, будет пример определения реакций для плоской рамы, загруженной всевозможными типами нагрузок. Где применим уже все фишки, о которых я буду рассказывать по ходу урока. Что же, давайте начнем разбираться с реакциями!
Что вы должны уже уметь?
В этом блоке статье, я расскажу, как и обещал, что Вы должны УЖЕ уметь, чтобы понять то, что я буду докладывать дальше, про реакции опор.
Должны уметь находить сумму проекций сил
Да, это то, что Вам когда-то рассказывали на термехе, как собственно, и опорные реакции. Если Вы шарите немного в этих проекциях, то можете смело переходить к следующему пункту. Если же нет, то специально на этот случай, у меня есть другая статья, про проекции сил. Переходите, просвещайтесь, после чего, обязательно, возвращайтесь сюда!
Должны уметь составлять сумму моментов относительно точки
Немного теории! Познакомимся для начала с самим понятием момент силы. Момент силы — это произведение силы на плечо. Где плечо — это кратчайшее расстояние от точки до силы, то есть перпендикуляр. Проиллюстрирую написанное:

На изображении показано, как определить момент силы F, относительно точки O.
Так же, для моментов, нужно задаться каким-то правилом знаков. Сила относительно точки может поворачивать как по часовой стрелке, так и против нее. Я в своих уроках буду придерживаться такого правила:
- Если сила относительно точки крутит ПРОТИВ часовой стрелке, то момент положительный.
- Если она крутит ПО часовой стрелки, то соответственно момент отрицательный.

Причем, это правило условно! Какое правило Вы будете использовать совсем не важно, результат получите тот же самый. В теоретической механике, к примеру, делают также как я рассказываю.
Должны разбираться в основных видах опор
Теперь поговорим о самих опорах. В этой статье, будем работать с двумя типами опор: шарнирно-подвижной и шарнирно-неподвижной.

Шарнирно-подвижная опора препятствует вертикальному перемещению элементу конструкции, в связи с чем, в ней, под действием внешней нагрузки возникает вертикальная реакция. Обозначают ее обычно как Ri, где i — точка крепления опоры.
Шарнирно-неподвижная опора имеет две реакции: вертикальную и горизонтальную. Так как препятствует перемещению в этих двух направлениях.

Вообще-то способов закрепления элементов конструкций и их условных обозначений достаточно много, но в рамках этой статьи их рассматривать не будем.
Примеры определения сил реакций опор
Вроде, всю подготовительную информацию дал, теперь будем рассматривать конкретные примеры. И начнем с простейшей расчетной схемы балки.
Определение реакций опор для балки
Возьмем балку на двух опорах, длиной 2 метра. Загрузим ее, посередине пролета, сосредоточенной силой:

Для этой расчетной схемы, выгодно записать такое условие равновесия:  То есть, будем составлять две суммы моментов относительно опорных точек, из которых можно сразу выразить реакции в опорах. В шарнирно-неподвижной опоре горизонтальная реакция будет равна нулю, ввиду того, что горизонтальные силы отсутствуют. Последним уравнением, взяв сумму проекций на вертикальную ось, сможем проверить правильность нахождения опорных реакций, это сумма должна быть равна нулю.
То есть, будем составлять две суммы моментов относительно опорных точек, из которых можно сразу выразить реакции в опорах. В шарнирно-неподвижной опоре горизонтальная реакция будет равна нулю, ввиду того, что горизонтальные силы отсутствуют. Последним уравнением, взяв сумму проекций на вертикальную ось, сможем проверить правильность нахождения опорных реакций, это сумма должна быть равна нулю.
Введем систему координат, пустим ось х вдоль балки, а ось y вертикально. Обозначим реакции в опорах как RA и RB:

Запишем уравнение моментов, относительно точки А. Сила F поворачивает ПО часовой стрелки, записываем ее со знаком МИНУС и умножаем на плечо. Сила RB поворачивает ПРОТИВ часовой стрелки, пишем ее со знаком ПЛЮС и умножаем на плечо. Все это приравниваем к нулю:

Из полученного уравнения выражаем реакцию RB.

Первая реакция найдена! Вторая реакция находится аналогично, только теперь уравнение моментов записываем относительно другой точки:


После нахождения реакций, делаем проверку:

Определение реакций опор для балки с распределенной нагрузкой
Теперь рассмотрим балку, загруженную распределенной нагрузкой:

Перед тем как посчитать реакции опор, распределенную нагрузку нужно свернуть до сосредоточенной силы. Если умножить интенсивность q на длину участка, на которой действует нагрузка, получим силу Q. Сила Q будет находиться ровно посередине балки, как и сила F в нашем первом примере:


Подробно комментировать нахождение реакций в опорах здесь, не буду. Просто приведу решение:






Определение опорных реакций для плоской рамы
Теперь, после освоения азов по расчету реакций, предлагаю выполнить расчет плоской рамы. Для примера, возьмем раму, загруженную всевозможными видами нагрузок:

Проводим ряд действий с расчетной схемой рамы:
- заменяем опоры на реакции;
- сворачиваем распределенную нагрузку до сосредоточенной силы;
- вводим глобальную систему координат x и y.

Для такой расчетной схемы, лучше использовать следующую форму условий равновесия:
 Составив первое уравнение, относительно точки A, сразу найдем реакцию в опоре B:
Составив первое уравнение, относительно точки A, сразу найдем реакцию в опоре B:



Записав второе уравнение, сумму проекций на ось х, найдем горизонтальную реакцию HA:


И, наконец, третье уравнение, позволит найти реакцию RA:


Не пугайтесь отрицательного значения реакции! Это значит, что при отбрасывании опоры, мы не угадали с направлением этой силы.
Расчет же показал, что RA, направленна в другую сторону:

В итоге, получили следующие реакции в опорах рамы:

Осталось проверить наши расчеты! Для этого предлагаю записать уравнение моментов, относительно точки B. И если, эта сумму будет равна нулю, то расчет выполнен верно:



Как видим, расчет реакций выполнен правильно!
На этом заканчиваю данный урок. Если у Вас остались какие-то вопросы по нахождению опорных реакций, смело задавайте их в комментариях к этой статье. Обязательно на все отвечу!
Спасибо за внимание! Если понравилась данная статья, расскажите о ней своим одногруппникам, не жадничайте


Также рекомендую подписаться на наши соц. сети, чтобы быть в курсе обновлений материалов проекта.
Момент силы и правило моментов
теория по физике 🧲 статика
Статика — раздел механики, изучающий условия равновесия тел.
Виды равновесия
Устойчивое равновесие
Если тело вывести из устойчивого равновесия, то появляется сила, возвращающая его в положение равновесия. Устойчивому равновесию соответствует минимальное значение потенциальной энергии (Ep min).
Неустойчивое равновесие
Если тело вывести из неустойчивого равновесия, то возникает сила, удаляющая тело от положения равновесия. Неустойчивому равновесию соответствует максимальное значение потенциальной энергии (Ep max).
Безразличное равновесие
При выведении тела из положения безразличного равновесия дополнительных сил не возникает.
Момент силы
Момент силы — векторная физическая величина, модуль которой равен произведению модуля силы на плечо силы:
M — момент силы. Единица измерения — Ньютон на метр (Н∙м). Направление вектора момента силы всегда совпадает с направлением вектора силы. d — плечо силы. Единица измерения — метр (м).
Плечо силы — кратчайшее расстояние между осью вращения и линией действия силы.
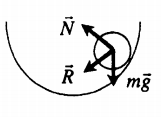
Пример №1. Стальной шар массой 2 кг колеблется на нити длиной 1 м. Чему равен момент силы тяжести относительно оси, проходящей через точку О перпендикулярно плоскости чертежа, в состоянии, представленном на рисунке?
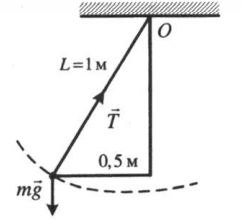
Плечом силы тяжести, или кратчайшим путем от прямой, проходящей через точку О перпендикулярно плоскости чертежа, до линии действия силы тяжести, будет отрезок, равный максимальному отклонению шара от положения равновесия. Следовательно:
Момент силы может быть положительным и отрицательным.
Если сила вызывает вращение тела по часовой стрелке, то такой момент считают положительным:
Если сила вызывает вращение тела против часовой стрелки, то такой момент считают отрицательным:
Правило моментов
Тело, имеющее неподвижную ось вращения, находится в равновесии, если алгебраическая сумма моментов всех приложенных к телу сил относительно этой оси равна нулю:
Иначе правило моментов можно сформулировать так:
Сумма моментов сил, вызывающих вращение тела по часовой стрелке, равна сумме моментов сил, вызывающих вращение тела против часовой стрелки.
∑ M п о ч а с . с т р . = ∑ M п р . ч а с . с т р .
Условия равновесия тел
∑ → F i = 0 ; → v o = 0
∑ → F i = 0 ; → v o = 0 и ∑ → F i = 0 ; → v o = 0
Простые механизмы
Простые механизмы — приспособления, служащие для преобразования силы. К ним относится рычаг, наклонная плоскость, блоки, клин и ворот.
Наклонная плоскость
| Тело не участвует в поступательном движении: | |
| Тело не участвует во вращательном движении: | |
| Тело находится в состоянии равновесия (не участвует ни в поступательном, ни во вращательном движении) | |
 |
Дает выигрыш в силе. Чтобы поднять груз на высоту h, нужно приложить силу, равную силе тяжести этого груза. Но, используя наклонную плоскость, можно приложить силу, равную произведению силы тяжести на синус угла уклона плоскости: Рычаг |
 |
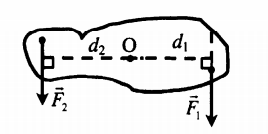
Дает выигрыш в силе, равный отношению плеча второй силы к плечу первой: F 1 F 2 . . = d 2 d 1 . . Неподвижный блок |
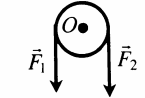 |
Изменяет направление действия силы. Модули и плечи сил при этом равны: Подвижный блок |
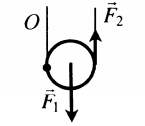 |
Дает выигрыш в силе в 2 раза: |
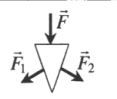 |
Делит силу на две равные части, направление которых зависит от формы клина: |
Золотое правило механики
При использовании простых механизмов мы выигрываем в силе, но проигрываем в расстоянии. Поэтому выигрыша в работе простые механизмы не дают.
Алгоритм решения
Решение
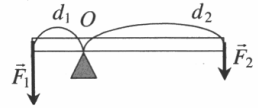
Известна лишь масса батона: m1 = 0,8 кг. Но мы также можем выразить плечи для силы тяжести батона и хлеба. Для этого длину линейки примем за один. Так как линейка поделена на 10 секций, можем считать, что длина каждой равна 0,1. Тогда плечи сил тяжести батона и рыба соответственно равны:
Запишем правило моментов:
Сила тяжести равна произведению массы на ускорение свободного падения. Поэтому:
Отсюда масса рыбы равна:
m 2 = m 1 d 1 d 2 . . = 0 , 8 · 0 , 3 0 , 4 . . = 0 , 6 ( к г )
pазбирался: Алиса Никитина | обсудить разбор | оценить
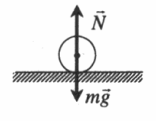
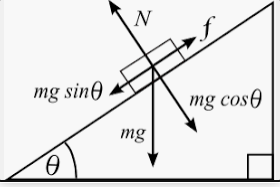
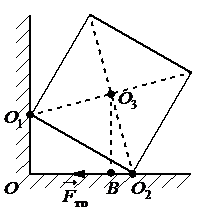 Однородный куб опирается одним ребром на пол, другим на вертикальную стену (см. рисунок). Плечо силы трения F → тр «> F тр относительно оси, проходящей через точку О3 перпендикулярно плоскости чертежа, равно.
Однородный куб опирается одним ребром на пол, другим на вертикальную стену (см. рисунок). Плечо силы трения F → тр «> F тр относительно оси, проходящей через точку О3 перпендикулярно плоскости чертежа, равно.
Алгоритм решения
- Сформулировать определение плеча силы.
- Найти плечо силы трения и аргументировать ответ.
Решение
Плечом силы трения называют кратчайшее расстояние от оси вращения до линии, вдоль которой действует сила. Чтобы найти такое расстояние, нужно провести из точки равновесия перпендикуляр к линии действия силы трения. Отрезок, заключенный между этой точкой и линией, будет являться плечом силы трения. На рисунке этому отрезку соответствует отрезок О3В.
pазбирался: Алиса Никитина | обсудить разбор | оценить
http://ssopromat.ru/statika/kak-opredelit-reaktsii-v-oporah-dlya-balki/
Моменты импульса и силы связаны между
собой важным соотношением, которое
называется уравнением моментов. Вначале
получим это соотношение для одной
материальной точки. С этой целью
продифференцируем момент импульса
(5.5) по времени
![]() .
.
(5.9)
Учитывая, что
![]()
и
![]() ,
,
с учетом (5.1), получим
![]() .
.
(5.10)
Это и есть уравнение моментов для одной
материальной точки.
Распространим теперь уравнение (5.10) на
систему материальных точек. Для этого
сложим все уравнения (5.10) для каждой
точки, понимая под М момент всех
действующих на нее сил, как внешних, так
и внутренних
![]() .
.
(5.11)
Суммарный момент всех внутренних сил
равен нулю. Действительно, внутренние
силы входят в систему попарно. Эти силы
направлены противоположно и действуют
вдоль одной и той же прямой, поэтому
момент таких двух сил, а значит и момент
всех внутренних сил равны нулю. В
результате получаем уравнение моментов
для системы материальных точек:
![]() ,
,
(5.12)
где
![]()
— суммарный момент всех внешних сил,
![]() —
—
момент импульса системы.
Таким образом, скорость изменения
момента импульса системы относительно
неподвижной точки (полюса) равна
результирующему моменту относительно
той же точки всех внешних сил, действующих
на систему.
Соотношение (5.12) справедливо, в частности,
для твердого тела, закрепленного в одной
точке. В этом случае оно выражает основной
закон динамики для тела, вращающегося
вокруг неподвижной точки. Из него
следует, что момент импульса является
основной динамической характеристикой
тела, вращающегося вокруг неподвижной
точки.
Из уравнения моментов (5.12) непосредственно
вытекает закон сохранения момента
импульса механической системы. Если
момент внешних сил равен нулю (![]() ),
),
то момент импульса системы остается
постоянным (![]() ).
).
Таким образом, момент импульса замкнутой
системы относительно произвольного
центра остается постоянным во времени.
Такова формулировка закона сохранения
момента импульса механической системы.
Этот закон, наряду с законами сохранения
импульса и энергии, является одним из
фундаментальных законов природы. В
теоретической механике, изучающей самые
общие законы движения, закон сохранения
момента импульса связывается с
изотропностью пространства, т.е. с
инвариантностью относительно вращений
пространства.
5.3. Момент силы и момент импульса относительно неподвижной оси
Следует различать и никоим образом не
смешивать понятия момента импульса и
момента силы относительно точки и
относительно оси. Момент вектора
относительно точки сам есть вектор,
тогда как момент вектора относительно
оси уже не является вектором.
М

Рис.5.4
оментом импульса
![]()
и моментом силы
![]()
относительно произвольной оси Z
называют проекции векторов
![]()
и
![]()
на эту ось в предположении, что точка О
(полюс) лежит на рассматриваемой оси
(рис.5.4).
Покажем на примере момента силы, что
выбор точки на оси влияет на значение
![]() ,
,
но не влияет на значение
![]() .
.
Будем полагать, что точка О, относительно
которой определен момент силы
![]() ,
,
расположена в произвольной точке на
оси вращения (рис.5.5). Разложим вектор
силы на три взаимно перпендикулярные
составляющие, две из которых,
![]() ||
||
и
![]() ,
,
параллельная и перпендикулярная оси
вращения, лежат в плоскости, проходящей
через ось вращения и точку приложения
силы, а третья
![]()
— перпендикулярна к этой плоскости
(обозначена на рисунке крестиком). Момент
силы
![]() относительно
относительно
точки О равен сумме моментов составляющих:
![]() .
.
В
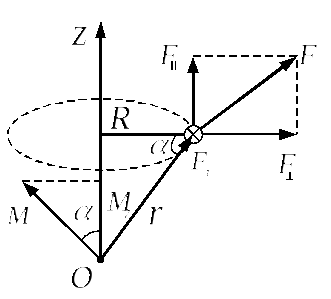
Рис.5.5
екторное произведение направлено
перпендикулярно плоскости, в которой
лежат образующие его векторы. Векторы
![]() ||
||
и
![]()
перпендикулярны оси, и следовательно,
их проекции на эту ось равны нулю. Поэтому
![]() .
.
(5.13)
Здесь
![]() ,
,
а
![]() .
.
Окончательно, для момента силы относительно
оси вращения получаем:
![]() ,
,
(5.14)
где
![]() —
—
радиус окружности с центром на оси OZ,
а
![]()
— касательная составляющая силы к этой
окружности.
Таким образом, момент силы относительно
оси характеризует способность силы
вращать тело вокруг этой оси. В соответствии
с правилом винта величина
![]() положительна,
положительна,
когда сила приводит к вращению тела
вокруг направления оси против часовой
стрелки, и отрицательна – при вращении
в противоположном направлении.
Проектируя векторное уравнение (5.12) на
ось ОZ, получим
![]()
![]() .
.
(5.15)
Это уравнение называется уравнением
моментов относительно неподвижной оси.
Когда момент внешних сил относительно
какой-либо оси равен нулю, то момент
импульса системы относительно той же
оси остается постоянным. Это закон
сохранения момента импульса относительно
неподвижной оси.
Этот закон в сочетании с законом
сохранения механической энергии
эффективно используется при решении
задач на вращательное движение твердого
тела (см.5.8).
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Привет! В этой статье предлагаю поговорить о реакциях опор, еще известных как опорные реакции. Для успешного освоения курса – «сопротивление материалов», каждый студент должен уметь определять реакции опор, чему учат еще в рамках дисциплины — «теоретическая механика». Но для тех, кто проспал механику на первом курсе, я подготовил данную статью, чтобы каждый желающий мог приобрести навыки по расчету опорных реакций.
Так как этот урок для чайников, я многие моменты буду упрощать и рассказывать только самое основное, чтобы написанное здесь, было понятно даже самому неподготовленному студенту — заочнику.
В рамках статьи рассмотрим 4 примера: двухопорная балка, загруженная посередине пролёта сосредоточенной силой, такая же балка, но загруженная распределённой нагрузкой, консольная балка и плоская рама.
Что такое реакция опоры?
Чтобы лучше понять, что такое реакция опоры (опорная реакция), давай рассмотрим следующий пример — балку (стержень) лежащую на опорах:

На балку давит нагрузка – сила, в свою очередь, балка давит на опоры. И чтобы балка лежала на опорах (никуда не проваливалась), опоры выполняют свою основную функцию — удерживают балку. А чтобы удерживать балку, опоры должны компенсировать тот вес, с которым балка давит на них. Соответственно, действие опор можно представить в виде некоторых сил, так называемых — реакций опор.

Для балки, и нагрузка, и реакции опор, будут являться внешними силами, которые нужно обязательно учитывать при расчёте балки. А чтобы учесть опорные реакции, сначала нужно научиться определять их, чем, собственно, и займёмся на этом уроке.
Виды связей и их реакции
Связи – это способы закрепления элементов конструкций. Опоры, которые я уже показывал ранее – это тоже связи.
В этой статье будем рассматривать три вида связей: жёсткая заделка, шарнирно-подвижная и шарнирно-неподвижная опора.
Жёсткая заделка

Жёсткая заделка — это один из вариантов закрепления элементов конструкций. Этот тип связи препятствует любым перемещениям, тем самым для плоской задачи, может возникать три реакции: вертикальная (RA), горизонтальная (HA) и момент (MA).

Шарнирно-подвижная и шарнирно-неподвижная опора
В этой статье будем работать с двумя типами опор: шарнирно-подвижной и шарнирно-неподвижной.

В шарнирно-неподвижной опоре возникает две реакции: вертикальная и горизонтальная. Так как опора препятствует перемещению в этих двух направлениях. В шарнирно-подвижной опоре возникает только вертикальная реакция.

Однако, видов связей и их условных обозначений достаточно много, но в рамках этой статьи их все рассматривать не будем. Так как, изученные ранее виды связей, являются основными и практически всегда, при решении задач по сопромату, ты будешь сталкиваться именно с ними.
Что такое момент силы?
Также необходимо разобраться с понятием момент силы.
Момент силы — это произведение силы на плечо. Где плечо — это кратчайшее расстояние от точки до силы, то есть перпендикуляр.
Проиллюстрирую написанное:
Правило знаков для моментов
Также для моментов, нужно задаться каким-то правилом знаков. Я в своих уроках буду придерживаться такого правила:
- если сила относительно точки стремится повернуть ПРОТИВ часовой стрелки, то момент положительный;
- если она стремится повернуть ПО часовой стрелке, то момент отрицательный.
Всю подготовительную информацию дал, теперь будем рассматривать конкретные примеры. И начнём с простейшей расчётной схемы балки.
Определение реакций для двухопорной балки
Возьмём балку, загруженную посередине сосредоточенной силой и опирающейся на шарнирно-неподвижную и шарнирно-подвижную опору:

Введём систему координат: направим ось x вдоль балки, а ось y вертикально. Обозначим реакции в опорах как HA, RA и RB:

Для тех, кто пришёл сюда, ещё будучи на этапе изучения теоретической механики, а я знаю, таких будет много, важно отметить, что в сопромате не принято указывать знаки векторов над силами.
В термехе же, в обязательном порядке, преподаватель от тебя настойчиво будет требовать указывать знак вектора над всеми силами, вот так:

Условия равновесия системы
Чтобы найти все реакции, нужно составить и решить три уравнения — уравнения равновесия:

Данные уравнения являются условиями равновесия системы. А так как мы предполагаем, что опоры обеспечивают это состояние равновесия (удерживают балку). То составив и решив уравнения равновесия — найдём значения опорных реакций.
Первое уравнение называется уравнением проекций — суммой проекций всех сил на координатную ось, которая должна быть равна нулю. Два других уравнения называются уравнениями моментов — суммами моментов всех сил относительно точек, которые должны быть равны нулю.
Уравнения равновесия
Как видишь, чтобы научиться находить реакции опор, главное — научиться правильно составлять уравнения равновесия.
Уравнение проекций
Запишем первое уравнение — уравнение проекций для оси x.
В уравнении будут участвовать только те силы, которые параллельны оси x. Такая сила у нас только одна — HA. Так как HA направлена против положительного направления оси x, в уравнение её нужно записать с минусом:
Тогда HA будет равна:
Поздравляю, первая реакция найдена!
Уравнения моментов
А теперь самое интересное…запишем уравнение моментов, относительно точки A, с учётом ранее рассмотренного правила знаков для моментов.
Так как сила F поворачивает ПО часовой стрелке, записываем её со знаком «МИНУС» и умножаем на плечо.
Так как сила RB поворачивает ПРОТИВ часовой стрелки, пишем её со знаком «ПЛЮС» и умножаем на плечо. И, наконец, всё это приравниваем к нулю:
Из полученного уравнения выражаем реакцию RB:

Вторая реакция найдена! Третья реакция находится аналогично, но только теперь уравнение моментов записываем относительно другой точки:

Проверка правильности найденных опорных реакций
Чем хороши задачи на определение реакций, так это тем, что правильность расчёта реакций легко проверить. Для этого достаточно составить дополнительное уравнение равновесия, подставить все численные значения и если сумма проекций сил или сумма моментов будет равна нулю, то и реакции, значит, найдены — верно, а если нет, то ищем ошибку.
Составим дополнительное уравнение проекций для оси y и подставим все численные значения:
Как видишь, реакции опор найдены правильно.
Определение реакций опор для балки с распределенной нагрузкой
Теперь рассмотрим балку, загруженную распределенной нагрузкой:

Перед тем как посчитать реакции опор, распределенную нагрузку нужно «свернуть» до сосредоточенной силы. Если умножить интенсивность q на длину участка, на которой действует нагрузка, получим силу Q. Сила Q будет находиться ровно посередине балки, как и сила F в нашем первом примере:

Подробно комментировать нахождение реакций в опорах здесь, не буду. Просто приведу решение:



Расчёт реакций для консольной балки
Давай рассмотрим теперь пример с жёсткой заделкой – консольную балку. Заодно посмотрим, как учесть силу, приложенную под углом (α = 30°).

Силу, направленную под определённым углом, нужно разложить на две составляющие – горизонтальную и вертикальную. А их значения найти из силового треугольника:


Покажем реакции в заделке и выполним расчёт:

Для этой задачи выгоднее использовать другую форму условий равновесия:

А выгодна она тем, что из каждого записанного уравнения будем сразу находить реакцию:

Не пугайся отрицательного значения реакции! Это значит, что при указании реакции, мы не угадали с её направлением. Расчёт же показал, что MA, направлена не по часовой стрелке, а против.
В теоретической механике, когда реакции получают с «минусом» обычно не заморачиваются и не меняют их направление на схеме, так и оставляют в ответе отрицательное значение, оговаривая, что да реакция найдена, но с учётом знака, на самом деле направлена в другую сторону. Потому что найденные реакции в задачах на статику, являются конечной точкой расчёта.
У нас же, в сопромате после нахождения опорных реакций, всё только начинается. Найдя реакции, мы всего лишь находим ВСЕ силы действующие на элемент конструкции, а дальше по сценарию стоит задача определить внутренние усилия, возникающие в этом элементе, расчёты на прочность и т. д. Поэтому на схеме, обязательно следует указывать истинное направление реакций. Чтобы потом, когда будут рассчитываться внутренние усилия ничего не напутать со знаками.
Если получили отрицательное значение, нужно отразить это на схеме:

С учётом изменений на схеме реакция будет равна:
Сделаем проверку, составив уравнение равновесие, ещё не использованное – сумму моментов относительно, скажем, точки B, которая, при правильном расчёте, конечно, должна быть равна нулю:
![]()
Если не менять направление реакции, то в проверочном уравнении нужно учесть этот «минус»:

Можешь посмотреть еще один пример, с похожей схемой, для закрепления материала, так сказать.
Реакции опор для плоской рамы
Теперь предлагаю выполнить расчёт плоской рамы. Для примера возьмём расчётную схему, загруженную всевозможными видами нагрузок:

Проводим ряд действий с расчетной схемой рамы:
- заменяем опоры на реакции;
- сворачиваем распределенную нагрузку до сосредоточенной силы;
- вводим систему координат x и y.

Выполняем расчёт реакций опор:


Меняем направление реакции RA:

В итоге получили следующие реакции в опорах рамы:

Осталось проверить наши расчеты! Для этого предлагаю записать уравнение моментов, относительно точки B. И если, эта сумма будет равна нулю, то расчет выполнен верно:

Как видим, расчет реакций выполнен правильно!
Содержание:
Моменты силы относительно точки и оси:
Для рассмотрения различных систем сил необходимо ввести понятия алгебраического и векторного моментов силы относительно точки и момента силы относительно оси. Введем эти характеристики действия силы на твердое тело и рассмотрим их свойства.
Алгебраический момент силы относительно точки
При рассмотрении плоской системы сил, приложенных к твердому телу, используется понятие алгебраического момента силы относительно точки.
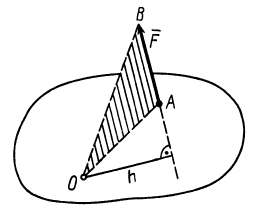
Рис. 19
Алгебраическим моментом силы относительно точки называют произведение модуля силы на плечо силы относительно этой точки (рис. 19), взятое со знаком плюс или минус.
Плечом 
 относительно точки называют кратчайшее расстояние между этой точкой и линией действия силы, т. е. длину отрезка перпендикуляра, опущенного из точки
относительно точки называют кратчайшее расстояние между этой точкой и линией действия силы, т. е. длину отрезка перпендикуляра, опущенного из точки  на линию действия силы
на линию действия силы  .
.
Обозначим  или
или  алгебраический момент силы
алгебраический момент силы  относительно точки . Тогда
относительно точки . Тогда

Если сила стремится вращать тело вокруг моментной точки (точки, относительно которой вычисляют алгебраический момент силы) против часовой стрелки, то берем знак плюс, если по часовой стрелке — знак минус.
Алгебраический момент силы представляет собой произведение силы на длину (в  ).
).
Из определения алгебраического момента силы относительно точки следует, что он не зависит от переноса силы вдоль ее линии действия. Алгебраический момент силы относительно точки равен нулю, если линия действия силы проходит через моментную точку. Сумма алгебраических моментов относительно точки двух равных по модулю, но противоположных по направлению сил, действующих вдоль одной прямой, равна нулю. Численно алгебраический момент относительно точки равен удвоенной площади треугольника, построенного на силе  и моментной точке:
и моментной точке:

Векторный момент силы относительно точки
При рассмотрении пространственной системы сил, приложенных к твердому телу, применяется понятие векторного момента силы относительно точки.
Векторным моментом силы относительно точки называют вектор, приложенный в этой точке и равный по модулю произведению силы на плечо силы относительно этой точки. Векторный момент силы направлен перпендикулярно плоскости, в которой лежат сила и моментная точка, таким образом, что с его конца можно видеть стремление силы вращать тело против движения часовой стрелки (рис. 20).
Плечом силы относительно точки называют кратчайшее расстояние от этой точки до линии действия силы.
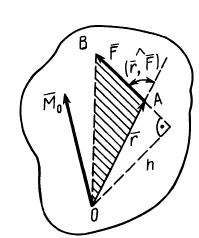
Рис. 20
Условимся векторный момент силы  относительно точки обозначать
относительно точки обозначать  , а его числовую величину —
, а его числовую величину —  . Тогда, согласно определению,
. Тогда, согласно определению,
Как и для алгебраического момента, векторный момент силы относительно точки равен удвоенной площади треугольника, построенного на силе и моментной точке:

Справедлива формула

где  —радиус-вектор, проведенный из моментной точки в точку приложения силы или любую другую точку линии действия силы.
—радиус-вектор, проведенный из моментной точки в точку приложения силы или любую другую точку линии действия силы.
Чтобы убедиться в справедливости формулы (3), достаточно показать, что по величине и направлению выражает векторный момент силы относительно точки . По определению векторного произведения двух векторов известно, что
по величине и направлению выражает векторный момент силы относительно точки . По определению векторного произведения двух векторов известно, что

Как показано на рис. 20,  , причем это равенство справедливо для любой точки линии действия, куда проведен радиус-вектор . Итак,
, причем это равенство справедливо для любой точки линии действия, куда проведен радиус-вектор . Итак,
что совпадает с векторным моментом силы относительно точки . Вектор , как известно, перпендикулярен плоскости, в которой расположены векторы и , т. е. плоскости треугольника  , которой перпендикулярен и векторный момент .
, которой перпендикулярен и векторный момент .
Направление тоже совпадает с направлением . Заметим, что векторный момент силы относительно точки считается вектором, приложенным к этой точке.
Векторный момент силы относительно точки не изменяется от переноса силы вдоль ее линии действия. Он станет равным
нулю, если линия действия силы пройдет через моментную точку.
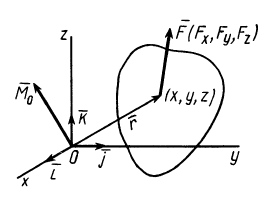
Рис. 21
Если сила дана своими проекциями  на оси координат и даны координаты
на оси координат и даны координаты  точки приложения этой силы (рис. 21), то векторный момент относительно начала координат, согласно формуле (3), после разложения по осям координат вычисляем по формуле
точки приложения этой силы (рис. 21), то векторный момент относительно начала координат, согласно формуле (3), после разложения по осям координат вычисляем по формуле
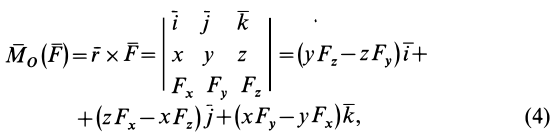
где  — единичные векторы, направленные по осям координат.
— единичные векторы, направленные по осям координат.
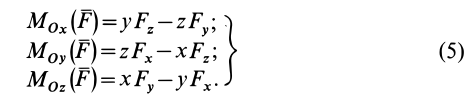
Используя формулу (4), можно выделить проекции на оси координат:
Модуль векторного момента и косинусы углов его с осями координат определяем по формулам
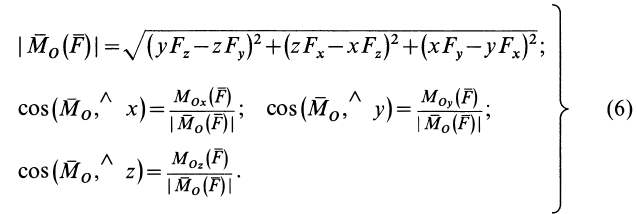
В формулах (6) числовую величину  берем со знаком плюс.
берем со знаком плюс.
Момент силы относительно оси
Моментом силы относительно оси называют алгебраический момент проекции этой силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с этой плоскостью (рис. 22). Момент силы относительно оси считается положительным, если проекция силы на плоскость, перпендикулярную оси (проекция силы на плоскость является вектором), стремится вращать тело вокруг положительного направления оси против часовой стрелки, и отрицательным, если она стремится вращать тело по часовой стрелке. Момент силы, например, относительно оси  обозначим
обозначим  .
.
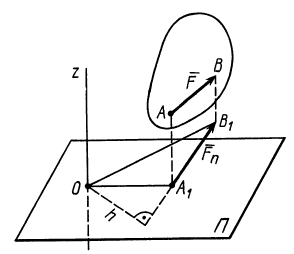
Рис. 22
По определению,

где  — вектор проекции силы
— вектор проекции силы  на плоскость
на плоскость  , перпендикулярную оси , а точка — точка пересечения оси с плоскостью .
, перпендикулярную оси , а точка — точка пересечения оси с плоскостью .
Из определения момента силы относительно оси следует, что введенный выше алгебраический момент силы относительно точки можно считать моментом силы относительно оси, проходящей через эту точку, перпендикулярно плоскости, в которой лежат сила и моментная точка. Момент силы относительно оси можно выразить через площадь треугольника, построенного на проекции силы  и точке пересечения оси с плоскостью:
и точке пересечения оси с плоскостью:

Из формулы (8) можно получить следующие важные свойства момента силы относительно оси:
- Момент силы относительно оси равен нулю, если сила параллельна оси. В этом случае равна нулю проекция силы на плоскость, перпендикулярную оси.
- Момент силы относительно оси равен нулю, если линия действия силы пересекает эту ось. В этом случае линия действия проекции силы на плоскость, перпендикулярную оси, проходит через точку пересечения оси с плоскостью и, следовательно, равно нулю плечо силы относительно точки .
В обоих этих случаях ось и сила лежат в одной плоскости. Объединяя их, можно сказать, что момент силы относительно оси равен нулю, если сила и ось лежат в одной плоскости.
Связь момента силы относительно оси с векторным моментом силы относительно точки на оси
Используя формулу (8), имеем (рис. 23)

Векторный момент силы относительно точки , взятой на пересечении оси с перпендикулярной плоскостью , выражается в виде

Векторный момент  направлен перпендикулярно плоскости треугольника
направлен перпендикулярно плоскости треугольника  . Аналогично, для другой точки
. Аналогично, для другой точки  оси
оси

причем векторный момент  направлен перпендикулярно плоскости треугольника
направлен перпендикулярно плоскости треугольника  . Треугольник
. Треугольник  является проекцией треугольников
является проекцией треугольников  и
и  на плоскость . Из геометрии известно, что площадь проекции плоской фигуры равна площади проецируемой фигуры, умноженной на косинус угла между плоскостями, в которых расположены эти фигуры. Угол между плоскостями измеряется углом между перпендикулярами к этим плоскостям. Перпендикуляром к плоскости треугольника
на плоскость . Из геометрии известно, что площадь проекции плоской фигуры равна площади проецируемой фигуры, умноженной на косинус угла между плоскостями, в которых расположены эти фигуры. Угол между плоскостями измеряется углом между перпендикулярами к этим плоскостям. Перпендикуляром к плоскости треугольника  является ось , а перпендикулярами к плоскостям треугольников
является ось , а перпендикулярами к плоскостям треугольников  и
и  —соответственно векторные моменты
—соответственно векторные моменты  и
и  . Таким образом,
. Таким образом,  , где
, где  — угол между вектором и осью . Отсюда по формулам (8′) и (9) имеем
— угол между вектором и осью . Отсюда по формулам (8′) и (9) имеем

причем знак  полностью определяется знаком
полностью определяется знаком  .
.
Аналогично,

т. е.

где  — любая точка на оси .
— любая точка на оси .
Формулы (11) и (12) отражают искомую связь между моментом силы относительно оси и векторными моментами силы относительно точек, лежащих на этой оси: момент силы относительно оси равен проекции на эту ось векторного момента силы относительно любой точки на оси.
Эту зависимость между моментом силы относительно оси и векторным моментом силы относительно точки на оси можно принять за определение момента силы относительно оси.
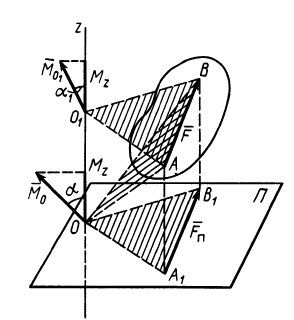
Рис. 23
Формулы для моментов силы относительно осей координат
Используя связь момента силы относительно оси с векторным моментом силы относительно точки на оси, можно получить формулы для вычисления моментов относительно осей координат, если даны проекции силы на оси координат и координаты точки приложения силы. Для оси  имеем
имеем
Согласно (5),
следовательно,

Аналогично, для осей  и
и 

Окончательно

По формулам (13) можно вычислить моменты силы относительно прямоугольных осей координат.
По этим формулам получаются необходимые знаки для  , если проекции силы
, если проекции силы  на оси координат и координаты
на оси координат и координаты  точки приложения силы подставлять в них со знаками этих величин.
точки приложения силы подставлять в них со знаками этих величин.
При решении задач момент силы относительно какой-либо оси часто получают, используя его определение, т. е. проецируя силу на плоскость, перпендикулярную оси, и вычисляя затем алгебраический момент этой проекции относительно точки пересечения оси с этой плоскостью.
Момент пары сил. Сложение пар сил. Равновесие пар сил
При изучении теоретической механики необходимо совершенно отчетливо уяснить, что в статике рассматриваются два простейших элемента: сила и пара сил. Любые две силы, кроме сил, образующих пару, всегда можно заменить одной —сложить их (найти равнодействующую). Пара сил нс поддается дальнейшему упрощению, она не имеет равнодействующей и является простейшим элементом.
Действие пары сил на тело характеризуется ее моментом — произведением одной из сил пары на ее плечо (на кратчайшее расстояние между линиями действия сил, образующих пару).
Единицей момента пары сил в Международной системе служит 1 нм (ньютон-метр = 1 н-1ж), а в системе МКГСС (технической)— 1 кГ-м.
Несколько пар сил, действующих на тело в одной плоскости, можно заменить одной парой сил (равнодействующей парой), момент которой равен алгебраической сумме моментов данных пар:
При равновесии пар сил
Если пары сил действуют в одной плоскости, то при решении задач достаточно рассматривать моменты пар как алгебраические величины. Причем знак момента определяется в зависимости от направления вращающего действия пары сил.
Дальнейшее изложение основано на правиле, т. е. считается момент положительным, если пара сил действует против хода часовой стрелки, если же пара сил действует на тело но ходу часовой стрелки, то момент считается отрицательным.
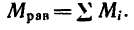
В том случае когда пары сил действуют на тело будучи расположенными в различных плоскостях, гораздо удобнее рассматривать пару сил как вектор, направленный перпендикулярно
к плоскости действия пары сил (рис. 62). Направление вектора в зависимости от направления вращательного действия пары определяется по направлению движения винта с правой нарезкой.
Задача 1.
Определить момент пары сил (рис. 63), если 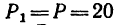 н, АВ — 0,5 м и а = 30°.
н, АВ — 0,5 м и а = 30°.
Решение.
1. При определении момента пары сил нужно прежде всего правильно определить плечо пары. При этом необходимо различать следующие понятия: плечо пары сил и расстояние между точками приложения сил нары.
Так как в механике твердого тела сила—скользящий вектор, то действие силы не изменяется при переносе точки ее приложения вдоль линии ее действия. Значит расстояние между точками приложения сил, образующих пару, можно изменять неограниченно. Но плечо пары при этом переносе остается неизменным.
В частном случае расстояние между точками приложения сил, образующих пару, может быть равно плечу.
Чтобы определить плечо данной пары из точки приложения одной из сил, например из точки В, восставим перпендикуляр ВС к линии действия другой силы. Расстояние ВС и есть плечо данной пары сил. Расстояние между точками приложения сил, образующих пару, АВ=0,5 м.
Легко видеть, что

2. Найдем момент пары сил:

Задача 2.
Как изменится момент пары сил  показанной на рис. 64, а (P = 50 н, AВ=0,4 м и а=135), если
показанной на рис. 64, а (P = 50 н, AВ=0,4 м и а=135), если
повернуть силы  так, чтобы они стали перпендикулярными АВ? Решение.
так, чтобы они стали перпендикулярными АВ? Решение.
1. Найдем момент пары при заданном положении ее сил (рис. 64, а).
Из точки В восставим перпендикуляр ВС к линиям действия сил  и найдем его длину:
и найдем его длину:

Момент пары при заданном положении сил

2. Повернем силы из заданного положения на угол
из заданного положения на угол  =а°— 90э в направлении против хода часовой стрелки (рис. 64, б). При таком положении сил относительно АВ плечом пары сил является расстояние между точками их приложения, поэтому
=а°— 90э в направлении против хода часовой стрелки (рис. 64, б). При таком положении сил относительно АВ плечом пары сил является расстояние между точками их приложения, поэтому

3. Сравнивая полученные результаты, видим, что после поворота сил момент пары увеличивается на 20—14,5 = 5,85 н-м.
4. Легко заметить, что силы  могут достичь перпендикулярного положения к АВ после их поворота на угол у в направлении по ходу часовой стрелки (рис. 64, в). В том случае плечом пары является тот же отрезок АВ, но момент пары
могут достичь перпендикулярного положения к АВ после их поворота на угол у в направлении по ходу часовой стрелки (рис. 64, в). В том случае плечом пары является тот же отрезок АВ, но момент пары

Момент пары сил изменяет свой знак.
Задача 3.
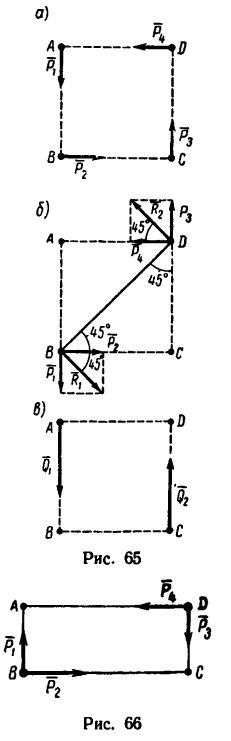
К точкам А, С и В, D, образующим вершины квадрата со стороной 0,5 м (рис. 65, а), приложены равные по модулю силы (Р = 12н) таким образом, что они образуют две пары сил
 Определить момент равнодействующей пары сил
Определить момент равнодействующей пары сил
Решение 1.
Плечи у обеих пар сил равны стороне квадрата поэтому

Решение 2.
1. Перенесем силы  из точек
из точек  в точки В и D (рис. 65, б). В точках В и D получаются системы сходящихся сил
в точки В и D (рис. 65, б). В точках В и D получаются системы сходящихся сил  и
и одинаковыми модулями.
одинаковыми модулями.
2. Сложим попарно эти силы у каждой из точек В и D. В обоих случаях

3. Силы R, модули которых теперь известны, направлены перпендикулярно к диагонали BD квадрата. Значит эта диагональ является плечом вновь образовавшейся пары сил  заменяющей собой две данные.
заменяющей собой две данные.
4. Найдем момент пары 

и, следовательно,

Эту пару в соответствии со вторым решением можно представить в виде пары  с плечом BD (диагональю данного квадрата).
с плечом BD (диагональю данного квадрата).
Но можно равнодействующую пару представить и в любом другом виде, например в виде сил Q = 24 и, приложенных к двум любым вершинам квадрата ABCD (рис. 65, в)
- Заказать решение задач по теоретической механике
Задача 4.
На прямоугольник ABCD (рис. 67) вдоль его длинных сторон действует пара сил  Какую пару сил нужно приложить к прямоугольнику, направив силы вдоль его коротких сторон, чтобы уравновесить пару
Какую пару сил нужно приложить к прямоугольнику, направив силы вдоль его коротких сторон, чтобы уравновесить пару 
Решение.
1. Момент данной пары сил

необходимо уравновесить парой, момент которой обозначим Л1м. Тогда, согласно условию равновесия,
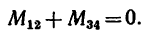
Откуда

2. Обозначив силы, образующие искомую пару  замечая, что ее плечо равно ВС, получим
замечая, что ее плечо равно ВС, получим
Отсюда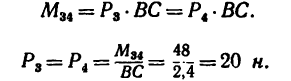
•Значит к прямоугольнику необходимо приложить пару сил с положительным (направленным против хода часовой стрелки) моментом, равным 48 н м. Силы, образующие эту пару, равняются
20 н каждая и одна из них должна действовать вдоль стороны АВ от А к В, вторая — вдоль стороны CD от С к D.
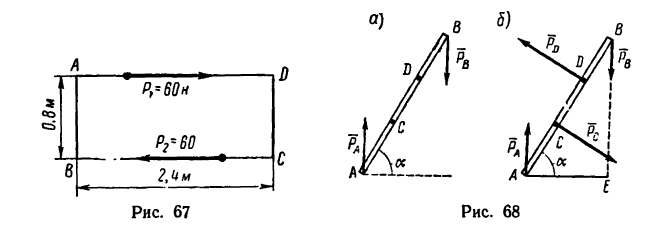
Задача 5.
Прямолинейный стержень АВ должен находиться в равновесии в положении, показанном на рис. 68, а (угол а =  При этом в точках А и В на стержень действуют вертикальные силы
При этом в точках А и В на стержень действуют вертикальные силы  образующие пару
образующие пару  Какие две равные силы нужно приложить к стержню в точках С и D, направив их перпендикулярно к стержню, чтобы обеспечить равновесие. АВ = 3 м, CD— 1 м,
Какие две равные силы нужно приложить к стержню в точках С и D, направив их перпендикулярно к стержню, чтобы обеспечить равновесие. АВ = 3 м, CD— 1 м, 
Решение.
1. Пару сил можно уравновесить только парой сил. Поэтому в точках С и D к стержню необходимо приложить две равные силы так, чтобы они образовали пару сил с моментом, равным моменту пары  но имеющим противоположный знак.
но имеющим противоположный знак.
Так как пара  поворачивает стержень на ходу часовой стрелки, искомые силы должны поворачивать его против хода часовой стрелки (рис. 68, б).
поворачивает стержень на ходу часовой стрелки, искомые силы должны поворачивать его против хода часовой стрелки (рис. 68, б).
2. Применяем условие равновесия:
Или, подставив значения моментов,
где
Отсюда
Следовательно, в точках С и D необходимо приложить силы  по 150 н каждая, как показано на рис. 68, б.
по 150 н каждая, как показано на рис. 68, б.
Момент силы относительно точки
Момент силы относительно точки при решении задач по статике, а затем и по динамике имеет не менее важное значение, чем проекции сил. Поэтому нужно уметь определять эту величину безошибочно. Обычно его числовое значение находят неправильно из-за ошибок, допускаемых при определении плеча.
Чтобы не допускать ошибок при определении моментов сил относительно точки, рекомендуется придерживаться следующего порядка:
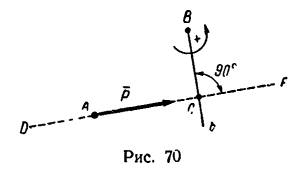
- Прежде всего нужно научиться «видеть» силу, момент которой определяем, и центр моментов — точку, относительно которой определяем момент (рис. 70 — сила и центр моментов — точка В).
- Затем из центра момента проводим прямую ВЬ перпендикулярно к линии действия силы DF. Длина перпендикуляра ВС от центра момента до линии действия силы и есть плечо.
- Потом находим знак момента. При этом если сила стремится повернуть плечо вокруг центра момента против хода часовой стрелки, то считаем момент положительным; если по ходу часовой стрелки, то отрицательным (тоже правило, что и при определении знака момента пары сил).
- Находим числовое значение момента силы относительно точки, умножив модуль силы на плечо.
 и центр моментов — точка В).
и центр моментов — точка В).По рис. 70

В частном случае момент силы может равняться нулю. Это происходит тогда, когда центр моментов лежит на линии действия силы, при этом плечо равняется нулю. По рис. 70 момент силы  относительно точки А (или С) равен нулю.
относительно точки А (или С) равен нулю.
Задача 6.
Определить моменты шести заданных сил (рис. 71) относительно точек А, В и С, если

Решение 1 — определение моментов гнести заданных сил относительно точки А (рис. 71, а).
1. Центр моментов в точке А. Через точку А проходят линии действия трех сил  Значит для этих сил плечи равны нулю. Следовательно,
Значит для этих сил плечи равны нулю. Следовательно,

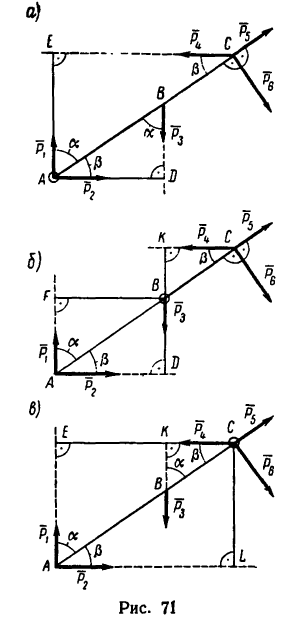
2. Находим момент силы  Опустив из точки А на линию действия
Опустив из точки А на линию действия
силы  перпендикуляр AD, получим плечо силы
перпендикуляр AD, получим плечо силы  Длину AD легко найти, так как это катет треугольника ABD:
Длину AD легко найти, так как это катет треугольника ABD:
3. Величина момента отрицательная (сила  поворачивает плечо AD вокруг точки А но ходу часовой стрелки), следовательно,
поворачивает плечо AD вокруг точки А но ходу часовой стрелки), следовательно,

4. Находим момент силы  Плечом силы
Плечом силы  является перпендикуляр АЕ к СЕ — линии действия силы
является перпендикуляр АЕ к СЕ — линии действия силы  Из треугольника АСЕ
Из треугольника АСЕ
Величина момента положительная (плечо АЕ поворачивается около точки А силой  против хода часовой стрелки). Следовательно,
против хода часовой стрелки). Следовательно,

5. Находим момент силы  Плечом силы
Плечом силы  относительно точки А является отрезок АС, так как сила
относительно точки А является отрезок АС, так как сила  направлена к АС перпендикулярно. Величина момента отрицательная:
направлена к АС перпендикулярно. Величина момента отрицательная:

Решение 2 — определение моментов сил относительно точки В (рис. 71, б).
1. Центр моментов в точке В.
2. Через точку В проходят линии действия двух сил:  Следовательно,
Следовательно,

3. Находим момент силы  Плечо силы
Плечо силы 
Величина момента отрицательная:

4. Находим момент силы  Плечо силы
Плечо силы 
Момент отрицательный:

5. Находим момент силы  Плечо силы
Плечо силы 
Величина момента положительная:

6. Находим момент силы  Плечом силы
Плечом силы является отрезок ВС. Момент положительный:
является отрезок ВС. Момент положительный:

Решение 3 — определение моментов сил относительно точки С (рис. 71, в) рекомендуется выполнить самостоятельно.
Ответ. 

В задаче силы расположены так, что либо их плечи определяются очень просто — как катеты прямоугольных треугольников, в которых даны гипотенузы, либо плечи заданы в условии задачи (ВС и АС).
Но иногда некоторые силы заданной системы оказываются расположенными относительно выбранного центра моментов так, что определить длину плеча трудно и требуется, например, предварительно вычислить длины еще одного-двух отрезков. В таких случаях целесообразно силу разложить на две составляющие и применить для определения ее момента теорему Вариньона.
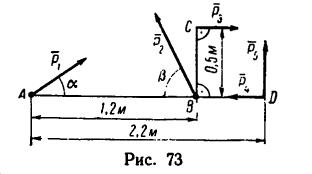
Задача 7.
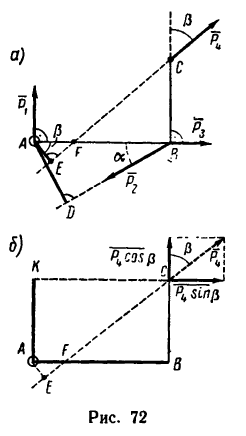
Определить моменты относительно точки 
 я, приложенных в точках А, В и С, как показано на рис. 72, а. Углы
я, приложенных в точках А, В и С, как показано на рис. 72, а. Углы ВС =1,5 м.
ВС =1,5 м.
Решение.
1. Относительно точки А моменты сил определяются аналогично
определяются аналогично

2. Находим момент силы  Вариант 1-й (рис. 72, а). Плечо АЕ силы
Вариант 1-й (рис. 72, а). Плечо АЕ силы  в данном случае определяем из
в данном случае определяем из  в котором известен только
в котором известен только 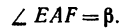 . Значит нужно предварительно определить одну из сторон. Найдем AF:
. Значит нужно предварительно определить одну из сторон. Найдем AF:
AF = AB — FB.
Величину FB находим из  в котором
в котором 
следовательно,

И теперь можем определить плечо АЕ:

Раскрываем скобки и заменяем 

Момент положительный, следовательно:
Вариант 2-й. Чтобы избежать определения плеча АЕ, которое в данном случае находится после предварительного вычисления двух отрезков (FB и AF), необходимо момент силы  относительно точки А найти по теореме Вариньона: момент равнодействующей плоской системы сил относительно любой точки, лежащей в той же плоскости, равен алгебраической сумме моментов составляющих сил относительно той же точки.
относительно точки А найти по теореме Вариньона: момент равнодействующей плоской системы сил относительно любой точки, лежащей в той же плоскости, равен алгебраической сумме моментов составляющих сил относительно той же точки.
Разложим силу  на две составляющие: одну, направленную вдоль отрезка ВС, и другую — перпендикулярно к нему (рис. 72, б).
на две составляющие: одну, направленную вдоль отрезка ВС, и другую — перпендикулярно к нему (рис. 72, б).
Модуль первой составляющей  а ее плечо — отрезок АВ, длина которого задана. Модуль второй составляющей
а ее плечо — отрезок АВ, длина которого задана. Модуль второй составляющей  а ее плечо АК = ВС =1,5 м.
а ее плечо АК = ВС =1,5 м.
Применяя теорему Вариньона, получаем

Как видно, получено точно такое же значение момента, что и в первом варианте решения:

- Теория пар сил
- Приведение системы сил к простейшей системе
- Условия равновесия системы сил
- Плоская система сил
- Аксиомы и теоремы статики
- Система сходящихся сил
- Плоское движение тела
- Принцип виртуальных перемещений