2.1. Составление структурной схемы для установившегося режима
Структурная
схема для установившегося режима
составляется на основе уравнений
элементов САУ
в статике или на основе линеаризованной
структурной схемы САУ
формальным путём приравнивания оператора
p
к нулю. Следует обратить внимание, что
последним способом установившийся
режим работы двигателя
может
быть описан лишь на основе полной
передаточной
функции двигателя по отношению к
Ud
и
МС
с выходом по частоте вращения, т.е. с
учетом внутренней обратной связи
двигателя.

Рис. 10. Структурная
схема для установившегося режима
2.2. Определение необходимого коэффициента передачи
По
полученной структурной схеме в
установившемся режиме можно определить
статическое отклонение частоты вращения
вала n
при приложении МC=MН
в разомкнутой системе без обратной
связи (без тахогенератора и фильтра) –
nPMc,
и в замкнутой САУ
– nЗMc.
При этом соблюдается равенство
![]() ,
,
(2.1)
где
kP=k1kПkДkТГ
, (2.2)
являющийся
коэффициентом передачи замкнутого
контура САУ
в разомкнутом состоянии.
Отклонение
nPMc
рассчитывается непосредственно из
структурной схемы в установившемся
режиме. При этом, согласно
системе уравнений (1.1)
МС
=
МН
=
СEIН,
МС
=1,98818,3
= 36,38 (Нм),
![]()
![]() .
.
Учитывая,
что относительное падение частоты
вращения в статике при приложении МС
имеет максимальную величину при
минимальной частоте вращения в пределах
заданного диапазона регулирования D,
исходя из требований п.п.
2
задания, имеем
![]() ,
,
(2.3)
![]() .
.
Тогда
необходимый коэффициент передачи kP
min
может быть найден из уравнения
(2.1),
а требуемый из условий статики коэффициент
k1
операционного усилителя У1
– из уравнения
(2.2),
учитывая, что kP
min
в качестве сомножителя имеет коэффициент
передачи тиристорного преобразователя,
равный kП
min.
![]()
![]()

![]()
![]()
![]()
![]()
![]() .
.
2.3. Определение значения переменных для режима с заданной частотой nЗад
Напряжение
на входе тиросторного преобразователя
находят по статической характеристике
при Ud
ЗАД=83,496
(В), U3=13,4
(В).
Напряжение на
входе корректирующего звена
![]()
Напряжение на
выходе фильтра равно
![]() .
.
Тогда задающее
напряжение на входе системы
![]() .
.
2.4. Определение статических отклонений n частоты вращения вала привода от заданного значения nЗад
Статическое
отклонение частоты вращения n
вала при приложении МС=МН
в разомкнутой системе без обратной
связи
![]()
![]()
в
замкнутой САУ
![]() ,
,
где  ,
,
![]() .
.
Статическое
отклонение частоты вращения n
вала при ступенчатом воздействии
возмущения UC=0,1UdЗАД
в разомкнутом состоянии системы
![]()
![]() ,
,
в
замкнутой САУ
![]()
![]() .
.
Из
полученных значений следует, что точность
поддержания частоты вращения вала в
замкнутой САУ
выше, чем в разомкнутой, так как статическое
отклонение в замкнутой САУ
уменьшается на коэффициент
 ,
,
появляющийся при наличии обратной
связи.
3. Исследование динамики системы
3.1. Построение аппроксимированной лачх системы в разомкнутом состоянии и проверка устойчивости
Некорректированная
САУ
в разомкнутом состоянии состоит из
последовательно соединенных звеньев:
—
усилительного — усилителя У1
с коэффициентом передачи k1,
найденным из условия статики во
второй части задания;
—
инерционного — тиристорного преобразователя
с коэффициентом передачи kП
и частотой сопряжения
![]() ;
;
—
колебательного — электродвигателя с
коэффициентом передачи kД
и собственной частотой колебаний
![]() ;
;
—
усилительного — тахогенератора с
коэффициентом передачи kТГ;
—
инерционного — фильтра с единичным
коэффициентом передачи и частотой
сопряжения
![]() .
.
Коэффициенты
передачи всех звеньев (в том числе и
желаемый k1)
могут быть объединены в соответствии
с формулой (2.2) в один коэффициент kР.
Следует учитывать, что наихудшие условия
с точки зрения устойчивости при
заданных параметрах динамических
звеньев будут при максимальном
значении kР
в требуемом диапазоне регулирования,
т.е. при kР=
kP
max.
Процесс
построения аппроксимированной ЛАЧХ
некорректированной САУ
в разомкнутом состоянии можно ускорить,
если воспользоваться следующей методикой:
—
определить значения ординаты LР(0)
= lgkP
max
и абсцисс частот сопряжения и колебаний
lg
П,
lg
Д,
lg
Ф;
—
на низких частотах графика LНКР()
отложить ординату, равную LР(0),
и провести через эту ординату прямую с
нулевым наклоном (параллельно оси
абсцисс) до ближайшей меньшей собственной
частоты одного из звеньев;
—
по мере увеличения частоты изменять
наклон ЛАЧХ
на -1 лог/дек в абсциссах, соответствующих
частотам, сопряжения инерционных звеньев
и на -2 лог/дек в абсциссах, соответствующих
собственной частоте колебательного
звена.
Таким
образом, для построения ЛАЧХ
необходимы следующие значения:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Устойчивость
замкнутой САУ
может быть определена с помощью критерия
Найквиста, который в случае рассматриваемой
устойчивой САУ
в разомкнутом состоянии и анализа ее
частотных характеристик в логарифмическом
масштабе сводится к условию, чтобы
![]() ,
,
(3.1)
где
частота среза С
системы определяется значением частоты
точки пересечения ЛАЧХ
САУ
в разомкнутом состоянии и оси абсцисс
(LР(С)
= 0).
Показатели
качества переходного процесса в замкнутой
САУ
тем лучше, чем больше запас устойчивости
по фазе
(=180-|Р(С)|)
и по амплитуде L
(L
равно абсолютному значению LР
при частоте, где |Р|=180).
В частности, это иллюстрируется рис.
11, где представлены зависимости
перерегулирования
в замкнутой САУ
по задающему воздействию от
и L.

Рис.
11. Кривые запасов устойчивости по модулю
L
и по фазе
от
перерегулирования
В
курсовой работе рассматривается
минимально-фазовая система, т.е. система
в разомкнутом состоянии состоит из
звеньев, имеющих однозначную зависимость
между АЧХ
и ФЧХ.
Для такой системы анализ устойчивости
можно провести по аппроксимированной
ЛАЧХ
системы в разомкнутом состоянии без
построения ЛФЧХ.
Значение (i)
при любой выбранной частоте i
для минимально-фазовой системы может
быть приближенно определено по
усредненному наклону ЛАЧХ
в этой частоте:
![]() ,
,
(3.2)
где ![]() .
.
(3.3)
Усредненный
наклон СР(i)
определяется путем нахождения координаты
LВ(i),
отстоящей на 1 декаду в сторону высоких
частот, т.е. LВ(i)
= LВ(10i),
и координаты LН(i),
отстоящей на 1 декаду в сторону
низких частот, т.е. LН(i)
= L(0,1i).
Параметры
системы таковы, что некорректированная
САУ
либо неустойчива, либо имеет малый запас
устойчивости, не удовлетворяющий
требованиям обеспечения заданного
качества регулирования. Определяя
значение ЛАЧХ
в частоте
![]()
среза
некорректированной САУ,
имеем
![]() —4,1
—4,1
лог,
![]() 1,57
1,57
лог
и
![]()
![]() ,
,
т.е.
некорректированная САУ неустойчива,
так как
![]() .
.
Соседние файлы в папке Курсовая раб
- #
- #
- #
- #
- #
Установившийся режим — это режим работы энергосистемы, при котором параметры режима могут приниматься неизменными[1].
Содержание
- 1 Общие положения
- 2 Расчёт параметров установившегося режима
- 3 Представление элементов энергосистемы
- 3.1 Генератор
- 3.2 Трансформатор
- 3.3 Нагрузка
- 3.4 Линии электропередачи
- 3.5 Выключатели
- 3.6 Шунтовые элементы
- 3.7 Связь с соседней энергосистемой
- 4 Источник
- 5 Использованные источники
Общие положения
Состояние энергосистемы можно считать установившимся (стационарным), если параметры описывающие её поведение, не меняются с теченеием времени или меняются по периодическому закону от времени (с постоянным периодом, амплитудой и фазой). При этом математическую модель исследуемых процессов в энергсосистеме можно упростить до системы линейных (нелинейных) уравнеий, вместо рассмотрения системы диффференциальных (интегро-дифференциальных) уравнений.
Очевидно, что в достаточно крупной энергосистеме полностью установившегося режима не существует, так как с увеличением числа элементов объединённых в энергосистему, вероятность того, что хотя бы один из изменит своё включённое состояние или свой режим работы достаточно велика. Вследствие этого, можно считать, что в единой энергосистеме постоянно происходит один или несколько переходных процессов и энергосистема постоянно находится в переходном режиме. С другой стороны, для исследования большинства процессов в крупной энергосистеме можно рассматривать квазиустановившиеся режимы, то есть такие режимы когда параметры изменяются незначительно и данным изменениями можно пренебречь.
Исследование параметров установившегося режима энергосистемы важно для решения целого ряда практических задач которые перечислены здесь.
При расчётах установившихся режимов необходимо иметь ввиду, что они должны отвечать определённым требованиям общефизического характера. Из этих соображений в первую очередь вытекает требование возможности существования установившегося режима, при этом необходимым условием существования является устойчивость этого режима. Достаточным условием для существования установившегося режима является возможность его технической осуществимости.
Любой установившийся режим, который возникает после окончания переходного режима, требует для своего существования сбалансированности мощности нагрузки и генерации (с учётом потерь на передачу), то есть в энергосистеме должен установиться некоторый баланс мощности и энергии.
Расчёт параметров установившегося режима
Электрическая сеть высокого напряжения (более 35 кВ) для передачи и распределения электроэнергии относится к категории электрических цепей, поэтому к расчёту её режима следовало бы применить общие методы теории электрических цепей.
На практике применение этих методов встречает ряд трудностей, вызванных как наличием большого количества элементов, образующих электрическую сеть, так и специфическими особенностями задания исходных данных.
Пусть задана мощность некоторого нагрузочного узла [math]dot{S}_i = P_i + j cdot Q_i [/math], которая должна быть учтена, наряду с другими нагрузками, при расчёте УР сети. Ток [math]i[/math]-го нагрузочного узла равен:
- [math]
displaystyledot{I}_i =frac{widehat{S}_i}{sqrt{3} widehat{U}_i}
[/math]
и, следовательно, может быть вычислен только при известном напряжении [math]dot{U}_i[/math] на шинах этой нагрузки. Однако именно напряжения в узлах электрической сети является искомой величиной. Это обстоятельство препятствует непосредственному использованию законов Киргофа для получения однозначного решения, в связи с чем практическое применение нашли другие методы решения, в том числе методы последовательных приблежений (итерационные метод). Данные методы основаны на последовательном уточнении напряжения в узлах электрической сети, причём в качестве начального приближения напряжений может быть использоавно разумное допущение о том, что напяржения во всех узлах в нормальном режиме не могут существенно отличаться от номинального напряжения данного класса сети. Введение такого допущения позволяет определить приближённо (на каждой итераци) потери пощности в каждом сетевом элементе и нагрузочные токи. Но знаение значение величины тока по концам сетевых элементов непосредственно связано с значением напряжения в узлах примыкания, которые считаются неизвестными, является достаточным для того, чтобы определить новое приближение напряжения. В результате итерацинного уточнения параметров УР становятся известными напряжения во всех узлах электрической сети.
При расчёте параметров установившегося режима обычно принимают следующие основные допущения:
- Частота в энергосистеме неизменна.
- Высшие гармонические составляющие отсутствуют.
- Взаимоиндукция между элементами не учитывается (в случае использования однолинейных расчётных схем).
- Нагрузка по фазам симметрична (в случае использования однолинейных расчётных схем).
- Параметры установившегося режима не зависят от времени.
- В большинстве случаев влияние внешних факторов (интенсивность освещения, скорость ветра, наличие глолёда, изменение электрчиеские параметров при механических деформациях и т. д.) не учитывается.
- Линии электропередачи представлены сосредоточенными параметрами (при длинах линий менее 5 % от длины электромагнитной волны).
Расчёт установившегося режима заключается в оценке всех параметров режима (в первую очередь узловых напряжений и потоков мощностей по ветвям), при заданных параметрах электрической сети:
- схема соединений элементов электрической сети;
- электрические параметры элементов (сопротивления, проводимости шунтов, коэффициенты трансформации и т. д.);
- мощности нагрузок, а также их статические характеристики по напряжению;
- мощности генераторов и диапазон регулирования реактивной мощности.
Математическое моделирование установившегося режима требует составление математического описания электрической сети. Это описание в первую очередь базируется на расчётной схеме, которая представляет собой идеализацию реальной электрической сети.
Под математической моделью электрической сети можно понимать систему уравнений связывающих параметры схемы замещения (исходной информации по элементам расчётной схемы) и неизвестных параметров установившегося режима. Важно отметить, что для одной и той же схемы замещения можно составить различные системы уравнений (математические модели), обладающие разными вычислительными характеристиками. Основные математические модели для оценки параметров установившегося режима:
- Уравнения узловых напряжений (наиболее распространённая модель).
- Контурные уравнения.
Представление элементов энергосистемы
Генератор
В установившемся режиме генераторы обычно представляют двумя способами:
- Источник постоянного напряжения и активной мощности (PV узел).
- Источник постоянной активной и реактивной мощности (PQ узел).
В случае когда генератор представлен источником постоянного напряжения, необходимо в процессе расчётов, учитывать регулировочный диапазон по реактивной мощности. Зачастую эта задача решается алгоритмически в ходе итерационной оценки параметров установившегося режима. В случае, если оценка величины реактивной мощности превышает регулировочный диапазон, то генератор необходимо представить в виде PQ узла.
Трансформатор
Трансформатор в расчётах обычно представлен в виде ветвей с сосредоточенными параметрами и постоянным коэффициентом трансформации. Более подробно представление трансформатора в установившихся режимах рассмотрено здесь.
Нагрузка
Нагрузочные узлы обычно представлены в виде узлов с известной активной и реактивной мощности и в математической модели обычно представлены следующим образом:
- Зависимость активной и реактивной мощности заданы некоторой функциональной зависимостью от напряжения, называемой статической характеристикой нагрузки.
- Постоянное значение потребления активной и реактивной мощности. С формальной точки зрения это тоже статическая характеристика нагрузки, при которой мощность не зависит от напряжения.
Линии электропередачи
В электрической сети для передачи электрической энергии служат кабельные и воздушные линии электропередач. В реальности сопротивление линии электропередачи распределено по всей её длине, что приводит к необходимости учитывать её волновые свойства, но это в значительной степени усложняет методы оценки параметров установившегося режима по математической модели. По этой причине линии электропередачи обыно представлены в виде сосредоточенных сопротивлений и шунтов (или цепочки сосредоточенных сопротивлений и шунтов). Более подробно схема замещения линии электропередачи рассмотрена здесь.
Выключатели
При подробном моделировании схемы распределительного устройства подстанции возникает необходимость представления выключателей в расчётной математической модели.
В практике расчётов наибольше распространение получили математические модели на основе уравнений узловых напряжений. Основной трудностью моделирования выключателей в таких моделях является их низкое электрическое сопротивление [math]Z lt lt 1 [/math] [Ом]. Этот факт приводит к следующим трудностям при составлении математической модели:
- Пусть [math]Z = 0 [/math] [Ом], при составлении уравнений узловых напряжений в матрице проводимостей появляются элементы с бесконечными проводимостями, что делает невозможным поиск решения этой системы.
- Для решения первой проблемы выключатель можно представить в виде очень маленького сопротивления [math]R = 0,001 [/math] [Ом], что может привести к расчётной неустойчивости в случае когда к узлу примыкают только выключатели.
- В случае исключения выключателей выключателей из расчётной модели потребуется дополнительные алгоритмы для оценки потоков активной и реактивной мощности через выключатель.
Шунтовые элементы
Для регулирования напряжения в узлах электрической сети применяются различные управляемые и неуправляемые компенсирующие устройства. С точки зрения математической модели все эти устройства можно представить в виде шунтов в узлах. Более подробно схемы замещения компенсирующих устройств рассмотрены здесь.
Связь с соседней энергосистемой
Для моделирования места подключения к соседней энергосистеме обычно используют концепцию шин бесконечной мощности. В этом узле должен быть задан фиксированный модуль и угол напряжения (узел [math]Vdelta[/math]. Расчётными величинами будут значения активной и реактивной мощности.
Важно отметить, что выбор величины модуля напряжения и угла может значительно повлиять на оценку параметров установившегося режима.
Источник
- Вычислительные модели потокораспределения в электрических системах / Б. И. Аюев [и др.]; под ред. П. И. Бартоломея. — Москва : Флинта : Наука, 2008. — 254, [1] с. : ил., табл.; 22 см; ISBN 978-5-9765-0697-8.
Использованные источники
- ↑ ГОСТ 21027-75 Системы энергетические. Термины и определения.
 Как правильно составить режим дня – одна из самых важных тем здорового образа жизни. Каждый человек сталкивается с необходимостью распределять свое время. Иногда, как в случае с работой, это необходимость. Иногда, например, при планировании максимально продуктивного времяпрепровождения или отдыха, это целесообразность.
Как правильно составить режим дня – одна из самых важных тем здорового образа жизни. Каждый человек сталкивается с необходимостью распределять свое время. Иногда, как в случае с работой, это необходимость. Иногда, например, при планировании максимально продуктивного времяпрепровождения или отдыха, это целесообразность.
Правильный режим дня подразумевает рациональное использование времени сна, личной гигиены, питания, работы, отдыха, занятий спортом и физической активности. Планирование распорядка дня и следование ему делает человека дисциплинированным, развивает организованность и целенаправленность. В результате чего вырабатывается и режим жизни, в котором минимизированы затраты времени и энергии на несущественные вещи.
В данном уроке будут даны ответы на вопросы о правильном распорядке дня, особенностях влияния биологических ритмов на активность и эффективность деятельности человека, основных подходах и методиках составления режима дня для разных людей: мужчин и женщин разных профессий, взрослых, студентов и школьников.
Содержание:
- Что такое режим дня
- Биологические ритмы и распорядок дня
- Совы и жаворонки
- Составляющие режима дня
- Как спланировать свой режим дня
- Проверочный тест
Что такое режим дня
Начнем с определения:
Режим дня – продуманный распорядок действий на день, планирование времени с целью его рационального и максимально эффективного распределения.
Как говорилось выше, распорядок имеет большое значение для самодисциплины и организованности любого человека, а также он важен для многих других прикладных аспектов нашей жизни. К примеру, режим дня играет не последнюю роль в построении тренировочных программ, составлении диет и организации правильного питания в целом, выборе самых продуктивных часов нашей жизни для работы или творчества.
Мейсон Карри в своей книге «Режим гения: Распорядок дня великих людей» приводит следующую аналогию режиму дня:
«В умелых руках режим дня – точно откалиброванный механизм, позволяющий наилучшим образом использовать наши ограниченные ресурсы: прежде всего, время, которого нам более всего не хватает, а также силу воли, самодисциплину, оптимизм. Упорядоченный режим – словно колея, по которой в хорошем темпе движутся умственные силы…»
Режим дня нужен для того, чтобы время не пользовалось нашей рассеянностью (см. эпиграф). Каждый человек сталкивался в своей деятельности со спешкой, ощущением аморфности времени, неразберихой в личных и рабочих делах. Мы не всегда можем отчетливо сказать, сколько времени потратили на то или иное занятие, поскольку не считаем необходимым постоянно контролировать использование своего времени. Однако именно распорядок всего дня целиком помогает наиболее разумно и эффективно распределить свое время. Кроме того, без навыка успешного планирования своего дня человек не научится строить и более долгосрочные планы, тем более что спланировать свой дневной график полностью не так сложно, ведь:
| ✔ | День как минимальная единица для планирования максимально удобен в силу легкой обозримости. |
| ✔ | Если какая-то попытка не удалась, можно перестроиться и изменить режим на следующий день. |
Отметим также тот факт, что употребление эпитета «правильный» по отношению к режиму дня в некоторой мере условно. Индивидуально для каждого человека понятие правильного распорядка может быть разным и зависеть от многих факторов: работы, привычек, особенностей организма. Но, как утверждают эксперты (психологи и медики), физиологические аспекты функционирования основных жизненных систем людей идентичны [Wedemeyer G. A., 1996]. На основе этого возможно составить универсальный, содержащий общие рекомендации режим, который в той или иной мере подойдет каждому. Опираясь на предложенные рекомендации с учетом своих индивидуальных потребностей, можно выработать распорядок суток, который оптимально подойдет именно вам.
Биологические ритмы и распорядок дня
Без учета суточных биологических ритмов организма человеку вряд ли удастся составить организованный и эффективный режим дня [Nature, 2009]. Например, если человек, привыкший обычно просыпаться в 7 утра, один день будет спать до 4 дня, после пробуждения он, скорее всего, будет чувствовать усталость, разбитость, замедление темпов активности. Такое состояние возникает в результате игнорирования особенностей биологических ритмов, биологических часов и циркадных ритмов.
Биологические ритмы (биоритмы) – периодически повторяющиеся изменения характера и интенсивности биологических процессов и явлений в живых организмах, от которых зависит их функциональность.
Биоритмы бывают внутренними (эндогенными), зависящими от биологических часов организма, и внешними (экзогенными), которые проявляются в синхронизации внутренних циклов (смена сна и бодрствования) с внешними раздражителями (смена дня и ночи). В плане составления режима дня нас больше всего интересуют циркадные ритмы – циклические колебания интенсивности различных биологических процессов, связанные со сменой дня и ночи, период которых приблизительно равен 24 часам [«Комсомольская правда», 2016].
Многие исследователи до недавнего времени относили изучение биоритмов к неакадемическому направлению физиологии, но благодаря последним исследованиям ситуация несколько изменилась. Так, в человеческом мозге обнаружили крошечный кластер в гипоталамусе размером примерно 20000 нейронов, который контролирует многие циркадные ритмы организма. Известный как супрахиазматическое ядро (SCN), этот центр выполняет работу внутреннего кардиостимулятора тела и влияет на биоритмы человека [Moore R. Y., 2001].
Совы и жаворонки
Психологи часто обращаются к известному разделению людей в зависимости от периода их активности на «сов» и «жаворонков». Первым тяжело вставать рано утром, а пик их активности приходится на вечерние и ночные часы. Вторые, наоборот, утром деятельны, а к вечеру быстро теряют запасы энергии. Интересно, что во многих странах Африки практически нет «сов», связано это с тем, что многие поселки и города не электрифицированы, а значит, когда солнце садится, местная жизнь замирает.
Предложенная классификация довольно условна, поскольку, как показывает практика, нормальный здоровый человек при желании постепенно может изменить свой тип бодрствования без вреда для организма. Главное – наличие силы воли и правильно выбранной стратегии.
К примеру, многим политикам, бизнесменам, спортсменам, которые много путешествуют по всему миру, часто приходится перестраивать свои циркадные ритмы в соответствии с разницей во времени между городами, чтобы не терять эффективности в работе при смене часовых поясов. На практике даже выработаны специальные рекомендации, которые помогут максимально безболезненно перестроить свой режим после смены часового пояса. Для этого вам следует:
| 1 | Спланировать первые дни приезда так, чтобы, по возможности, психологическая и физическая нагрузки были минимальными. |
| 2 | Употреблять за два дня до полета только легкую пищу, исключить алкогольные напитки, а также непривычные для вас блюда, и по возможности воздержаться от курения. |
| 3 | Учесть, что с востока на запад лучше лететь утренним или дневным рейсом, а с запада на восток –вечерним. |
| 4 | За 3-5 дней до вылета постепенно перестроить свой режим в соответствии с часовым поясом того места, куда вы собираетесь лететь. |
| 5 | Если предстоит полет на запад, старайтесь ложиться спать и вставать попозже. При путешествии в восточном направлении засыпать нужно раньше, а просыпаться рано утром. |
Часто людям даже не приходится подключать свою силу воли для изменения режима активности, поскольку организм человека способен самостоятельно адаптироваться к меняющимся внешним условиям. К примеру, обычные школьники, как правило, ходят на занятия к 8.30 в течение долгого периода обучения. С годами организм школьника привыкает следовать заданному циркадному ритму, то есть активно работать в первой половине дня. Однако если после окончания школы выпускник поступает в университет на вечернее отделение, где занятия проходят во вторую смену, организму приходится подстраиваться под новое расписание. Со временем биологические часы студента естественным образом адаптируются к новой системе без особых усилий с его стороны.
Знание закономерностей работы биологических часов поможет правильно спланировать день. Ниже приведен примерный расчет периодов активности разных систем среднестатистического человека по часам:
04:00. Начало циркадного ритма. В это время организм выделяет в кровь стрессовый гормон кортизол, который запускает механизмы основных функций и отвечает за нашу активность. Именно этот гормон помогает проснуться людям, которые предпочитают вставать рано.
05:00-06:00. Пробуждение организма. В этот период ускоряется обмен веществ, повышается уровень аминокислот и сахара, которые не позволяют человеку крепко спать под утро.
07:00-09:00. Идеальное время для легкой физической нагрузки, когда можно быстро привести расслабленный после сна организм в тонус. В это время хорошо работает пищеварительная система: усвоение полезных веществ происходит быстрее, что помогает эффективно перерабатывать пищу и преобразовывать ее в энергию.
09:00-10:00. Период, когда осваивается энергия, полученная от приема пищи. В течение этого времени человек способен хорошо справляться с заданиями на внимание и сообразительность, а также успешно использовать кратковременную память.
10:00-12:00. Первый пик работоспособности, период максимальной умственной активности. В это время человек хорошо справляется с задачами, требующими повышенной концентрации.
12:00-14:00. Время ухудшения работоспособности, когда необходимо дать отдых уставшему мозгу. Этот период подходит для перерыва на обед, поскольку работа пищеварительного тракта ускоряется, кровь отходит к желудку, умственная активность организма снижается.
14:00-16:00. Это время лучше посвятить спокойному перевариванию съеденного, так как организм пребывает в состоянии легкой усталости после обеда.
16:00-18:00. Второй пик активности и работоспособности. Организм получил энергию от пищи, все системы вновь работают в полном режиме.
18:00-20:00. Лучшее время для ужина, полученную еду организм успеет переварить до утра. После приема пищи можно прогуляться или спустя час заняться физическими упражнениями, отправиться на тренировку.
20:00-21:00. Это время подходит для занятий спортом, посещения секций, общения.
21:00-22:00. Период, когда возрастает способность мозга к запоминанию. В это время есть не рекомендуется.
22:00. Начало фазы сна. В организме запускаются восстановительные процессы, выделяются гормоны молодости. Тело переходит в состояние отдыха.
23:00-01:00. В это время процесс обмена веществ максимально замедляется, снижается температура тела и частота пульса. Наступает фаза глубокого сна, когда наш организм лучше всего отдыхает.
02:00-03:00. Период, когда все химические реакции замедлены, гормоны практически не вырабатываются. Отсутствие сна в это время может привести к ухудшению состояния и настроения в течение всего дня.
Примечание: в холодное время года происходит незначительное смещение описанных процессов физиологической активности во времени вперед.
Тест «Жаворонок или сова»
Предлагаем вам пройти тест на определение того, являетесь вы совой, жаворонком или голубем. Это может помочь вам определить, в какое время суток вы наиболее продуктивны, и скорректировать ваш режим дня в зависимости от этого.
Составляющие режима дня
Мы уже говорили, что предложить универсальный распорядок дня, который бы подошел каждому невозможно. При составлении расписания учитываются многие личные факторы, но существуют и пункты которым обязательно должны следовать все. Это необходимые условия для всех, кто хочет вести здоровый образ жизни и быть здоровым.
1
Сон
Реалии современного мира таковы, что многие люди либо отводят сну недостаточное количество времени, либо регулярно спят больше, чем это требуется для организма. В обоих случаях это негативно влияет на физическое состояние человека и на его деятельность. Четкий режим дня и правильно отведенное время на сон позволяют всем системам жизнеобеспечения человека восстановиться и отдохнуть, а также помогают избежать расстройств сна и нервной системы [MedicalNewsToday, 2019, Ho L., 2020].
Итак, идеальным временем для сна считается период с 23.00 до 7.00 утра [Healthline, 2019]. В среднем взрослый человек должен спать около 7-8 часов в сутки, хотя известно множество случаев, когда люди спали гораздо меньше (3-6 часов в сутки), но чувствовали себя прекрасно и эффективно выполняли свою работу. Среди знаменитых успешных малоспящих людей стоит отметить Юлия Цезаря, Леонардо да Винчи, Бенджамина Франклина, Наполеона Бонапарта, Томаса Джефферсона, Сальвадора Дали, Николу Тесла, Томаса Эдисона, Уинстона Черчилля и Маргарет Тетчер.
Однако не стоит прибегать к крайним случаям и пренебрегать здоровым сном вовсе. В ходе некоторых клинических экспериментов наблюдались единичные случаи, когда люди не спали больше 250 часов подряд. К концу этого отрезка времени врачи отмечали у пациентов расстройство внимания, невозможность фокусировки зрения на предмете дольше 20 секунд, нарушение психомоторики. Большого вреда здоровью такие эксперименты не приносили, но выбивали организм человека из привычного состояния на несколько дней.
Для многих людей, желающих выровнять свой график и научиться ложиться пораньше, актуальным является вопрос «как уснуть» в запланированное время. Вот некоторые рекомендации:
- Вместо просмотра по телевизору детективных сериалов или серфинга в Интернете перед сном лучше почитать книгу.
- За несколько часов до сна стоит позаниматься физическими упражнениями, бегом, просто пройтись.
- Не следует есть тяжелую пищу на ночь.
- Перед сном полезно проветривать помещение.
- Таким образом составить свой распорядок дня, чтобы во время отхода ко сну организм чувствовал усталость.
Даже если долго не получается уснуть вечером, с утра все равно нужно встать в запланированное время. Вы не выспитесь один день, но уже в следующую ночь сможете заснуть раньше.
2
Приемы пищи
Каждому известна фраза «чтобы жить, нужно питаться», однако питаться нужно правильно. Детально о правильном питании и всем, что с ним связано, мы поговорим в следующем уроке, здесь отметим лишь несколько важных нюансов. Еда – топливо для организма. С ней мы получаем не только энергию на день, которая расходуется на умственную и физическую деятельность, но и обеспечиваем организм нужными витаминами и микроэлементами. Именно поэтому важно питаться регулярно и полноценно, необходимость применения диеты обязательно должна быть согласована со специалистом, который поможет составить оптимальное меню с учетом физиологических потребностей организма.
3
Отдых
Восстановление сил и работоспособности организма происходит не только во время сна, но и в период активности организма. Во время работы человеку также нужен отдых, поскольку постоянно поддерживать трудоспособность на высоком уровне невозможно. Не тратьте свой обеденный перерыв на выполнение работы, лучше отдохните, и скоро вы сможете взяться за дело с новыми силами и работать более продуктивно и эффективно.
После работы также важно отдохнуть. Если весь день вы работаете за компьютером, по возвращении домой проведите вечер без него. Уделите время чтению, общению с родными и близкими, самообразованию.
4
Работа
Каждому из нас приходится работать: школьникам – ходить на занятия и делать уроки, студентам – посещать лекции и семинары, готовиться к экзаменам, взрослым – строить карьеру и зарабатывать на жизнь. Умение спланировать свое рабочее время является важной частью режима дня в целом. Методики самоменеджмента, управления временем, а также рекомендации для повышения личной эффективности на работе и вне ее вы сможете найти в статьях специальной рубрики нашего блога «Time-management».
5
Физические нагрузки
Это рекомендованная составляющая дня для всех, кто заботится о своем здоровье. Задуматься о тренировках нужно в первую очередь тем, чья работа ограничивает двигательную активность организма на протяжении всего дня. Даже если у вас нет возможности записаться в тренажерный зал или ходить в бассейн, можно заниматься дома или на площадках во дворах и школах. При наличии медицинских противопоказаний вместо занятий спортом можно практиковать легкие прогулки на свежем воздухе после еды. Подробно о роли физической активности в здоровом образе жизни читайте в этом уроке.
6
Психическое равновесие
Как говорится, «в здоровом теле здоровый дух», но верно и обратное. Если человек спокоен и удовлетворен жизнью, получает удовольствие от работы – значит, и соблюдать режим дня ему проще. Чтобы разобраться в себе, мы сделали специальный курс «Самопознание», который позволит разобраться в себе, понять свои сильные и слабые стороны. Узнайте подробнее.
Как спланировать свой режим дня
Так выглядело расписание дня Бенджамина Франклина, размещенное им в своей «Автобиографии»:
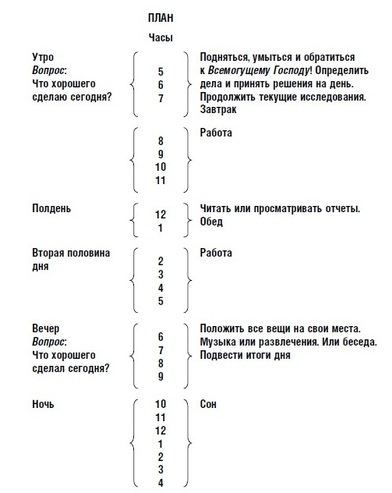
(изображение сделано на основе фрагмента книги М. Карри)
Ниже приведены некоторые рекомендации по составлению вашего режима дня.
Как составить режим дня взрослого
При составлении режима дня ориентируйтесь на следующие пункты:
|
1 |
Расписание старайтесь не только продумывать, но и записывать. Пользуйтесь специальными программами, ежедневником или просто запишите его на лист бумаги. Письменно составленный режим дня будет не только напоминать о делах, но и служить молчаливым укором, если что-либо из запланированного не будет выполнено. |
|
2 |
Важно, чтобы сначала в режим было включено только то, что вы действительно делаете на протяжении дня. Проще говоря, в расписание стоит вносить пункты, которые вы выполните наверняка, например, встанете в 7, чтобы собраться, позавтракать и, с учетом дороги, к 9 быть на работе. Если же вы только хотите сходить в тренажерный зал после работы, но еще ни разу не делали этого, не стоит такой пункт вносить в план дня. Позже, когда идею удастся реализовать, режим можно будет скорректировать. Помните, что приучить себя к следованию распорядку, а, следовательно, и самодисциплине, можно, только выполняя реальные пункты расписания. |
|
3 |
В разных составляющих своего режима (в первую очередь это касается работы) ранжируйте задачи. Ставьте выполнение сложных заданий вначале и в таком же порядке выполняйте. |
|
4 |
Старайтесь учитывать физиологические потребности своего организма, о которых говорилось выше. Соблюдайте личную гигиену, не засиживайтесь допоздна, принимайте пищу в одно и то же время. |
|
5 |
Важно также, чтобы несколько дней после принятия решения о начале составления режима вы начали отмечать промежутки времени, затрачиваемые на те или иные действия. Выведите среднестатистический показатель того, сколько времени у вас занимает завтрак, дорога на работу, ответ на письма электронной почты, общение с коллегами и прочее. На основе полученных данных и нужно составить первый режим дня. Употребление характеристики «первый» не случайно – в будущем, скорее всего, вы будете неоднократно корректировать свой режим, и важно научиться во время этого процесса опираться на конкретные временные рамки, а не на субъективные ощущения затрачиваемого времени. |
Очевидно, что режим дня составляется в соответствии с занятостью на работе, которая более-менее определена. Тем не менее важно планировать не только рабочее время, но и отдых, время на домашние заботы и прочие дела. Это порой трудно сделать, но со временем вы научитесь.
Как составить режим дня школьника (подростка)
Здесь тоже есть несколько основных моментов:
|
1 |
Первое, с чего стоит начать, – проведение «полевого этапа». Некоторое время нужно потратить на наблюдение: сколько времени занимает дорога в школу, на секцию, подготовка домашнего занятия и т. д. Если школьник составляет свой режим самостоятельно, полученные данные нужно согласовать с родителями, которые помогут учесть особенности возраста и отвести достаточное время на отдых. |
|
2 |
Школьное образование построено с учетом педагогических, психологических методик, нюансов возраста. Количество уроков, факультативов даются в таком объеме, чтоб не перегружать школьника. Но время отдыха нужно спланировать отдельно. |
|
3 |
Недопустимо большую часть свободного времени проводить за просмотром телевизора или компьютерными играми. Эта проблема решается записью в секции и кружки, выполнением отведенных родителями обязанностей по дому и прочими более полезными делами. |
|
4 |
Выполнение ребенком распорядка дня первое время важно мотивировать. Здесь все зависит от родителей. |
|
5 |
Для учащихся начальной школы нужно обязательно отвести время для дневного сна. Старшеклассникам можно ложиться спать немного позже, как и самостоятельно вносить коррективы в свой распорядок в соответствии с занятостью. Для подготовки письменных домашних заданий лучше всего подходит отрезок между 16.00 и 18.00. Читать книги и учебники лучше вечером. |
Ниже приведен один из вариантов почасового режима дня школьника 3 класса, одобренный педиатрами:
- 7:00. Подъем.
- 7:00-7:30. Зарядка, умывание.
- 7:30-7:45. Завтрак.
- 8:30-13:05. Занятия в школе.
- 13:30-14:00. Обед.
- 14:00-15:45. Подвижные игры, прогулки, времяпровождение на свежем воздухе.
- 15:45-16:00. Полдник.
- 16:00-18:00. Самоподготовка, домашнее задание.
- 18:00-19:00. Свободное время, отдых.
- 19:00-19:30. Ужин.
- 19:30-20:00. Свободное время, работа по дому.
- 20:00-20:30. Вечерняя прогулка.
- 20:30-21:00. Подготовка ко сну.
- 21:00. Сон.
И в заключение еще один вариант.
Как cоставить режим дня студента
Составить режим дня для студента помогут следующие рекомендации:
|
1 |
Начните со сбора и анализа информации о затрачиваемом времени. Если режим дня составлялся еще во время учебы в школе, то кардинально в распорядке студента дневного отделения ничего не изменится. |
|
2 |
По сравнению со школьниками, у студентов зачастую возрастают объемы получаемой информации и время для самоподготовки. Стоит учесть при этом, что умственная деятельность должна чередоваться с физической и времяпровождением на свежем воздухе – для сохранения здоровья эти пункты не стоит исключать из расписания. |
|
3 |
Деятельность студента связана с постоянным напряжением умственных сил, и чтобы использовать их плодотворно, нужно помнить не только о чередовании труда и отдыха, но и о некоторых других особенностях. В работу нужно входить постепенно, сначала повторяя уже известный материал и лишь потом принимаясь за изучение нового. |
|
4 |
Режим дня на время сессии нужно составлять отдельно. Подготовку следует начинать в те же временные отрезки, что и происходят пары на протяжении семестра – мозг уже привык к активности в такое время. Особое внимание стоит уделить питанию и отдыху. |
|
5 |
Правильно составленный и продуманный режим дня, как бы его ни было трудно придерживаться первое время, скоро приведет к выработке динамического стереотипа, что сделает следование распорядку более легким. |
Опросы и наблюдения показывают, что у тех студентов, кто составляет режим дня, остается до 5 часов свободного времени на личные интересы. Следование распорядку позволит сохранить в деятельности здоровый баланс: не тратить всё время на «зубрежку» с одной стороны, но и не гулять, постоянно отсыпаясь на парах – с другой.
Проверьте свои знания
Если вы хотите проверить свои знания по теме данного урока, можете пройти небольшой тест, состоящий из нескольких вопросов. В каждом вопросе правильным может быть только один вариант. После выбора вами одного из вариантов, система автоматически переходит к следующему вопросу. На получаемые вами баллы влияет правильность ваших ответов и затраченное на прохождение время. Обратите внимание, что вопросы каждый раз разные, а варианты перемешиваются.
А далее поговорим о правильном питании.
I. РАСЧЕТ УСТАНОВИВШИХСЯ РЕЖИМОВ ЭЭС
1.1. Модель установившихся режимов в детерминированной постановке
Анализ условий работы электрических систем требует расчета установившихся режимов, целью которого является определение параметров режима – напряжений в узлах электрической сети, токов и мощностей, протекающих по отдельным элементам этой сети. Эти расчеты выполняются с помощью схемы замещения, которая представляет собой графическое изображение электрической сети, показывающее последовательность соединения отдельных элементов и отображающее свойства рассматриваемой электрической схемы.
К схеме замещения применимы такие понятия, как ветвь, узел и контур. Ветвью называется участок цепи, который состоит из последовательно соединенных ЭДС и сопротивления (либо только сопротивления) и вдоль которого в любой момент времени ток имеет одно и то же значение. Узел определяется как точка соединения двух и более ветвей, а контур – как участок цепи, образованный таким последовательным соединением нескольких ветвей, при котором начало первой ветви контура соединено с концом последней в одном узле.
Элементы схем замещения делятся на активные и пассивные. К активным элементам схем замещения относят источники ЭДС и тока. Для них характерно то, что они задают напряжения или токи в точках присоединения этих элементов в соответствующей цепи, независимо от ее остальных параметров. Пассивные элементы схем замещения (в первую очередь сопротивления и проводимости) создают пути для протекания электрических токов. Пассивные элементы обычно разделяют на поперечные и продольные.
Поперечные пассивные элементы – это ветви, включенные между узлами схемы и нейтралью, т.е. узлом, имеющим напряжение, равное нулю. К продольным пассивным элементам относят ветви, соединяющие все узлы, кроме узла с напряжением, равным нулю.
Основными элементами расчетной схемы замещения являются узлы и ветви.
Модель узла электрической сети
В общем случае отдельный узел электрической сети представляют схемой замещения (рис.1.1).
Здесь , регулируемые активная и реактивная мощности генерации узла ; , активная и реактивная мощности нагрузки узла ; проводимость поперечной ветви; , активная и реактивная мощности, выдаваемые из узла в сеть; , активная и реактивная мощности, вытекающие из узла в узел ; множество узлов, смежных с -ым узлом; , модуль напряжения и угол сдвига в узле .
Величина определяется с помощью следующего выражения:
,
где активная проводимость поперечной ветви; реактивная проводимость поперечной ветви.
При расчетах можно также использовать продольную и поперечную составляющие комплекса напряжения и .
Известно, что
,
и, наоборот,
,
.
Комплексы токов могут быть найдены через заданные активные и реактивные мощности и и модули напряжений . Например, для генераторов
активный ток,
реактивный ток
или
модуль тока,
фаза тока относительно напряжения .
Аналогично записывают выражения для токов других элементов.
Обратное преобразование от токов к мощности очевидно:
,
или
,
.
Модель ветви электрической сети
Рассмотрим модель ветви, которая в общем случае может быть представлена следующей схемой замещения (рис.1.2).
Схема замещения содержит следующие параметры, характеризующие ветвь:
сопротивление продольное :
;
проводимость ветви :
;
проводимость на землю в узле связи :
;
проводимость на землю в узле связи :
.
Необходимо подчеркнуть, что в общем случае .
Комплексные коэффициенты трансформации в узле
,
а в узле
.
Соответственно ток , вытекающий из узла по связи , определяется с помощью закона Ома:
1.2 Определение потоков и потерь мощности
Расчет установившихся режимов сложных электрических систем методом узловых напряжений состоит из двух частей:
1) определение напряжений узлов;
2) определение токов, потоков и потерь мощности в ветвях.
Если напряжения всех улов известны, то можно легко определить для каждой ветви ток по закону Ома, а также потоки и потери мощности в соответствии с приведенными ниже выражениями.
Пусть дана схема замещения сети (рис. 1.3), состоящая из трех линий электропередачи, генераторных узлов 1, 2 и нагрузочного узла 3.
Ток (фазный) в продольной части линии (рис.1.3) по закону Ома равен:
,
где , линейные напряжения узлов и ; сопротивление ветви ; взаимная проводимость узлов.
Имея в виду, что напряжение может быть представлено в виде суммы действительной и мнимой составляющих:
,
а проводимость – как сумма активной и реактивной:
,
можно получить выражения для активной и реактивной составляющих тока по связи :
;
.
Перетоки активной и реактивной мощностей по отдельным связям определяются по формулам:
,
.
Вычислим суммарные потери мощности для схемы, приведенной на рис. 1.3., при следующих детерминированных данных: сопротивление линий , , ; модули напряжений узлов , , ; сдвиги фаз узлов , , .
Решение.
1. Определение полных проводимостей отдельных связей электрической сети и отдельных составляющих этих проводимостей и :
,
,
,
, ,
, ,
, ;
2. Определение активных и реактивных составляющих напряжений отдельных узлов электрической сети:
,
,
,
,
,
;
3. Определение активных и реактивных составляющих токов по отдельным связям электрической сети:
,
,
,
,
,
;
4. Определение реверсивных составляющих токов по отдельным связям, , :
,
,
,
,
,
;
5. Определение перетоков активной и реактивной мощностей по отдельным связям:
,
,
,
,
,
;
6. Определение реверсивных перетоков активной и реактивной мощностей по отдельным связям:
,
,
,
,
,
;
7. Определение потерь активной , реактивной и полной мощностей в отдельных связях:
,
,
,
,
,
,
,
,
;
8. Определение суммарной потери полной мощности в электрической сети :
.
II. РЕГРЕССИОННЫЕ МОДЕЛИ В ЭЛЕКТРОЭНЕРГЕТИКЕ
В электроэнергетике экспериментальные исследования получили большое распространение как на этапе проектирования, так и при текущей эксплуатации электрических сетей. При математической обработке массивов экспериментальной информации возникает необходимость в подборе эмпирических формул, устанавливающих связь одного измеренного параметра с другим.
Задача определения точного вида выявленной взаимозависимости параметров решается с помощью регрессионного анализа.
Регрессионный анализ заключается в определении аналитического выражения зависимости, в которой изменение одного параметра обусловлено влиянием другого параметра , т.е. необходимо определить функциональную зависимость . Количественная оценка данной зависимости осуществляется с помощью построения регрессионной функции – уравнения регрессии.
В общем случае уравнение регрессии зависимого параметра от независимого параметра можно записать в виде полинома степени
.
В простейшем случае между двумя коррелированными параметрами существует линейная зависимость
, (3.1)
которое является линейным уравнением регрессии.
В выражение (3.1) величина называется свободным членом уравнения регрессии, а величина коэффициентом уравнения регрессии.
Предположим, что в результате измерений сформированы массивы экспериментальной информации по параметрам и , которые определяются зависимостью , а график этой зависимости представлен на рис.3.3.
Известно, что с помощью интерполирования через любые точек всегда можно провести кривую, выраженную полиномом степени , так чтобы она в точности прошла через каждую из точек (рис.3.3., непрерывная кривая). Однако вид такой кривой крайне сложен для ее математического описания. Возникает задача сглаживания экспериментальной зависимости. Экспериментальные данные желательно обработать так, чтобы по возможности достаточно точно отразить общую тенденцию зависимости от , но вместе с тем «сгладить» нехарактерные
случайные отклонения (рис.3.3., пунктирная кривая), вызванные, в том числе, и неизбежными погрешностями измерений. Одним из эффективных методов расчетного сглаживания является метод наименьших квадратов (МНК).
Формулировка МНК
Пусть имеются результаты независимых измерений, оформленные в виде статистической таблицы.
Пусть выбрана зависимость вида , содержащая ряд числовых коэффициентов , , …, , …, . Требуется так выбрать эти коэффициент, чтобы кривая в определенном смысле наилучшим образом изображала зависимость, полученную по данным измерениям.
Согласно этому методу требование наилучшего согласования кривой вводится для того, чтобы сумма квадратов отклонений экспериментальных измерений от сглаживающей кривой обращалась в минимум.
Запишем как функцию не только параметра , но и коэффициентов , , …, , …, :
.
По МНК коэффициенты надо выбрать так, чтобы выполнялось условие
. (3.2)
Для того чтобы выполнить это условие, необходимо продифференцировать выражение (3.2) по коэффициентам , , …, , …, и приравнять полученные производные к нулю:
где значение частной производной функции по коэффициенту в точке .
Для решения этой системы необходимо задаться конкретным видом зависимости . Рассмотрим наиболее часто встречающийся на практике случай, когда функциональная зависимость имеет вид (3.1).
Определение коэффициентов линейной функции с помощью МНК
Пусть в опыте зарегистрирована совокупность значений , , . Требуется определить по МНК коэффициенты , линейного уравнения регрессии (3.1), отображающего данную экспериментальную зависимость.
Найдем частные производные выражения (3.1) по коэффициентам и :
, .
Тогда, используя МНК, можно записать
или
(3.3)
Раскроем скобки в системе (3.3) и, произведя суммирование, получим
(3.4)
Из системы (3.4) определяем коэффициенты линейного уравнения регрессии (3.1)
(3.5)
Определение коэффициентов и из системы (3.5) является трудоемкой задачей при большом количестве экспериментальных данных. Расчеты значительно упрощаются, если использовать коэффициент корреляции . Пусть значения экспериментальных измерений являются дискретными случайными величинами с равновероятностными элементарными исходами. Тогда можно записать
, , (3.6)
, , (3.7)
, , (3.8)
. (3.9)
В выражении (3.7) для дискретной величины раскроем скобки и проведем суммирование, т.е.
Учитывая (3.6) и (3.8), получим
или
. (3.10)
Преобразуем выражение (3.9), раскрыв скобки и проведя суммирование
Учитывая (3.6), запишем
или
. (3.11)
Учитывая (3.6), (3.10) и (3.11), запишем систему для определения коэффициентов линейного уравнения регрессии следующим образом
(3.12)
Из (3.12) видно, что коэффициент имеет размерность равную отношению размерностей экспериментальных данных к , а коэффициент размерность экспериментальных данных
Таким образом, линейное уравнение регрессии (3.1) с учетом коэффициентов (3.12) примет вид
. (3.13)
Следует отметить, что знак при коэффициенте корреляции показывает характер тенденции корреляционной связи и является одним из критериев правильности выполненных расчетов:
▪ знак «+» означает, что изменение исследуемых параметров и имеет одинаковую тенденцию (корреляционная связь положительная);
▪ знак «» означает, что изменение исследуемых параметров и имеет разную тенденцию (корреляционная связь отрицательная);
▪ значение означает, что корреляционная связь между исследуемыми параметрами и отсутствует.
Для статистического определения коэффициентов линейного уравнения регрессии между двумя случайными величинами и необходимо иметь данные их измерений. Пусть наблюдались следующие пары одновременных измерений величин и : , , …, , …, , тогда для получения зависимости в виде линейного уравнения регрессии нужно:
1. Определить математические ожидания случайных величин и по формулам:
,
;
2. Определить дисперсии случайных величин и по формулам:
,
;
3. Определить среднеквадратичные отклонения случайных величин и по формулам:
,
;
4. Определить коэффициент корреляции случайных величин и по формуле:
;
5. Определить коэффициенты регрессии по формулам:
.
Важной проверкой составления регрессионной модели является знак :
▪ знак «+» означает, что изменение исследуемых параметров и имеет одинаковую тенденцию;
▪ знак «» разную тенденцию;
6. Составить регрессионную модель по формуле:
.
Пример. В течение ряда лет максимум нагрузки энергосистемы и годовая выработка электроэнергии имели следующие значения:
Решение. Для заданных параметров и определим основные статические характеристики.
Нагрузка потребителей :
,
.
Годовая выработка электроэнергии :
,
.
Определяем величину коэффициента корреляции:
Так как параметры и имеют одинаковую тенденцию изменения – оба увеличиваются, положительный знак при коэффициенте корреляции определен верно.
Запишем уравнение регрессии на :
,
,
.
Положительный знак у параметра в правой части уравнения регрессии свидетельствует об идентичной тенденции в изменении параметров, что соответствует истине.
Приняв из таблицы , по уравнению регрессии находим . В этом случае погрешность сглаживания будет равна
.
III. МЕТОДЫ РЕШЕНИЯ СОСТОЯНИЯ ЭЛЕКТРИЧЕСКОЙ СИСТЕМЫ
Расчеты установившихся режимов составляют существенную часть общего объема исследований электроэнергетических систем, выполняемых как на стадии проектирования, так и в процессе эксплуатации этих систем. Эти расчеты необходимы при выборе конфигурации схемы электрической системы и параметров ее элементов, анализе устойчивости и оценке токов коротких замыканий, определении наиболее экономичных режимов ее работы.
Исходными данными о нагрузках реальных электрических систем при их проектировании и эксплуатации обычно служат значения потребляемых ими активных и реактивных мощностей (), которые могут приниматься постоянными (), либо зависящими от напряжения в точке подключения нагрузки к сети, т.е. . Исходными данными об источниках питания, как правило, служат выдаваемые генераторами в систему активные мощности () и абсолютные значения напряжений в точках их подключения: , хотя в ряде случаев источники питания могут быть заданы и постоянными значениями активных и реактивных мощностей (,) аналогично нагрузкам.
При указанных исходных данных целью расчета установившегося режима электрической системы является определение мощностей и токов в ветвях схемы замещения и комплексных значений напряжений в ее узловых точках. С математической точки зрения задача сводится к решению системы нелинейных уравнений из-за нелинейности зависимости мощности от тока и напряжения.
Конкретный вид этих уравнений определяется формами уравнений состояния, положенных в основу математического описания установившегося режима и обобщенными параметрами системы. Из уравнения состояния наиболее широко применяются узловые уравнения, которые характеризуются как простотой формирования, так и большими возможностями эффективной организации процесса решения.
Методы решения можно разделить на две большие группы: прямые и итерационные. К прямым относятся методы, позволяющие получить решение в результате конечного числа арифметических операций, зависящего только от вычислительной схемы, а также от порядка и структуры матрицы коэффициентов системы уравнений. В математике методы этой группы называются точными, поскольку, если исходные данные заданы точно (в виде целых чисел или обыкновенных дробей) и вычисления выполняются точно (например, по правилам действия над обыкновенными дробями), то решение также получается точным. Практически в основе всех прямых методов решения линейных алгебраических уравнений установившегося режима электрической системы лежит метод последовательного исключения неизвестных, называемый методом Гаусса.
К итерационным относятся методы, с помощью которых решение системы линейных алгебраических уравнений получается как предел последовательных приближений, вычисляемых посредством единообразных операций. В математике итерационные методы называются приближенными, они позволяют получить решение системы уравнений лишь с заданной точностью.
3.1 Метод простой итерации
Исходная система линейных алгебраических уравнений
(3.1)
В предположении, что , , приводится к виду
(3.2)
Система уравнения (3.2) согласно методу простой итерации решается следующим образом:
1) задаются начальными (нулевыми) приближениями неизвестных , ;
2) значения подставляются в правые части системы (3.2) и тем самым определяются следующие приближения неизвестных , ;
3) подстановкой полученных значений находится следующее приближение и т.д.
Таким образом, на -ом шаге итерационного процесса система (3.2) запишется как
(3.3)
Итерационный процесс продолжается до тех пор, пока значения , полученные на двух смежных итерациях, не будут отличаться на величину, меньшую заданной погрешности решения , т.е. до выполнения условия
, . (3.4)
При выполнении неравенства (3.4) для произвольного начального приближения , итерационный процесс называется сходящимся. В противном случае итерационный процесс не приводит к решению и называется расходящимся.
Условием сходимости итерационного процесса является выражение:
, , . (3.5)
В матричном виде систему (3.1) можно представить следующим образом
.
В дальнейшем исходная система (3.1) заменяется системой
и приводится к виду
.
Тогда матрицу неизвестных согласно системе (3.3) можно записать:
.
Пример 3.1. Методом простой итерации с точностью определить напряжения в узлах электрической сети, описываемых следующей системой уравнений:
Решение. Проверим достаточное условие сходимости (3.5)
условие выполняется,
условие выполняется,
условие выполняется,
условие выполняется.
Приводим систему линейных алгебраических уравнений к виду (3.2)
Задаем начальное приближение:
.
Определяем первое приближение:
.
Определяем второе приближение:
.
Дальнейшие расчеты выполняются в соответствии с вышеизложенным алгоритмом. Результаты вычислений представлены в таблице.
Результаты расчета
№ итерации
0.000000
0.000000
0.000000
0.000000
1
27.115344
12.166667
41.550218
25.724820
2
20.452435
21.067212
55.839344
38.215894
3
20.415115
16.997163
56.563434
45.645101
4
19.755137
14.885029
59.281450
44.882491
5
17.900517
15.273254
59.111408
45.292926
6
18.163006
14.423980
58.640808
45.564942
7
18.060997
14.371238
58.902613
45.179391
8
17.891799
14.486831
58.762686
45.260422
9
17.995880
14.377573
58.723224
45.266178
10
17.970948
14.409265
58.768850
45.214391
11
17.958636
14.422125
58.742067
45.239364
12
17.976558
14.405994
58.744407
45.235717
13
17.969299
14.414212
58.750543
45.230288
14
17.969311
14.414008
58.745774
45.235095
15
17.971645
14.411862
58.747251
45.233564
16
17.970110
14.413423
58.747737
45.233210
17
17.970454
14.413022
58.746989
45.233931
18
17.970680
14.412824
58.747356
45.233559
19
17.970422
14.413076
58.747334
45.233597
20
17.970528
14.412964
58.747239
45.233683
21
17.970533
14.412964
58.747310
45.233613
22
17.970498
14.412997
58.747291
45.233634
23
17.970520
14.412975
58.747283
45.233641
24
17.970516
14.412980
58.747294
45.233630
Таким образом: , , , .
3.2 Метод Гаусса-Зейделя
Этот метод, так же как и метод простой итерации, базируется на использовании уравнений системы, приведенных к виду (3.2). Однако в отличие от метода простой итерации для вычисления -ой переменной на каждом -ом шаге итерационного процесса используются значения переменных, вычисленные на предыдущем -ом шаге, так и на данном. При этом на -ом шаге итерационного процесса система (3.2) примет вид
(3.6)
Условием сходимости итерационного процесса по методу Гаусса-Зейделя является выражение (3.5).
Пример 3.2. Найти решение системы алгебраических уравнений, рассмотренной в примере 3.1 с помощью метода Гаусса-Зейделя.
Решение. Проверим достаточное условие сходимости (3.5)
условие выполняется,
условие выполняется,
условие выполняется,
условие выполняется.
Приводим систему линейных алгебраических уравнений к виду (3.2)
Задаем начальное приближение:
Определяем первое приближение:
,
,
,
Дальнейшие расчеты выполняются в соответствии с вышеизложенным алгоритмом. Результаты вычислений представлены в таблице.
Результаты расчета
№ итерации
0.000000
0.000000
0.000000
0.000000
1
27.115344
22.424116
46.851929
42.360552
2
24.730290
16.023911
59.682907
45.077610
3
18.201203
14.688184
58.735208
45.268326
4
18.080373
14.442402
58.786626
45.239376
5
17.968024
14.416285
58.747886
45.234934
6
17.971697
14.413132
58.748012
45.233749
7
17.970328
14.412986
58.747268
45.233652
8
17.970526
14.412977
58.747299
45.233635
9
17.970510
14.412980
58.747288
45.233635
10
17.970515
14.412981
58.747290
45.233635
Таким образом: , , , .
3.3 Метод Ньютона-Рафсона
Итерационный метод Ньютона-Рафсона используется для решения нелинейного уравнения вида
.
В основу этого метода положена линеаризация исходного нелинейного уравнения. В этом случае нелинейную функцию записывают в виде ряда Тейлора (разложение по степеням полинома):
.
В случае линейной постановки задачи при решении методом Ньютона-Рафсона используется следующее выражение:
.
Поскольку решение находим при , то, приняв , получим
.
Итерационный процесс продолжается до тех пор, пока значения , полученные на двух смежных итерациях, не будут отличаться на величину, меньшую заданной погрешности решения , т.е. до выполнения условия
или
.
Для корректного применения метода необходимо определить интервал изменения переменной, на котором уравнение имеет точно один корень. При выборе начального приближения должно выполняться следующее условие
.
Следует отметить, что данный метод применим лишь для тех нелинейных функций, которые монотонны, гладки, дифференцируемы, не имеют разрывов 1-го и 2-го рода и однозначно определены.
Пример 3. Методом Ньютона-Рафсона найти решение нелинейной функции :
.
Расчеты выполнить с двойной машинной точность .
Решение. Приравняем функцию к нулю:
.
Вычислим первую производную :
.
Определим возможную область существования решения. Для этого необходимо определить интервал, на котором функция меняет свой знак, т.е.:
при , , ;
при , , ;
при , , .
Выбираем за начальное приближение , так как
.
Определяем первой приближение:
,
.
Определяем второе приближение:
,
.
Дальнейшие расчеты выполняются с вышеизложенным алгоритмом. Результаты вычислений представлены в таблице.
Результаты вычислений
2,000000
37,000000
65,000000
0,569231
1
1,430769
10,140369
33,773415
0,300247
2
1,130522
1,263773
26,109534
0,048403
3
1,082119
0,020977
25,257471
0,000831
4
1,081289
0,000006
25,243609
0,000000
5
1,081289
0,000000
25,243605
0,000000
Окончательно имеем: .
IV. ЭЛЕКТРИЧЕСКОЙ СЕТИ
Схемы замещения современных сложных электрических систем содержат сотни и более узлов и ветвей. Количество уравнений состояния для таких систем настолько велико, что для их решения необходимо использовать современные вычислительные комплексы. Более того, составление уравнений состояния для сложных электрических схем является весьма трудоемкой процедурой. Поэтому для решения таких задач в практических расчетах широко используется аналитическое представление конфигурации схемы замещения электрической сети с помощью процедур алгебры матриц и элементов теории графов.
4.1 Схема замещения электрической сети как связанный граф
Основоположником применения теории графов при расчете электрических схем является Кирхгоф, который сформулировал основные топологические правила решения контурных уравнений схемы. Он впервые показал функциональную связь электрической схемы с ее геометрией.
Схема замещения электрической сети представляется в виде связанного направленного (ориентированного) графа и состоит из ветвей (ребра), связывающих различные узлы (вершины). Эти ветви организуют цепочки (пути графа), которые, замыкаясь, могут образовывать замкнутые контуры. Замкнутый контур, у которого хотя бы одна из ветвей является внешней по отношению к другим замкнутым контурам, называется замкнутым независимым контуром.
Рассмотрим схему замещения электрической сети (рис.4.1).
Схеме замещения на рис. 4.1., соответствует связанный направленный граф, который содержит: узлы 1, 2, 3, 4, 5; ветви , , , , , ; контура, образуемые ветвями: ,, . Замкнутыми независимыми контурами будут являться контура, образованные ветвями: ,.
Факт совпадения конечной точки ветви с отдельным узлом графа называется инциденций.
Для направленного графа могут быть определены:
1. Матрица соединений ветвей в узлах (первая матрица инциденций);
2. Матрица соединений ветвей в независимые контуры (вторая матрица инциденций).
Матрица соединений впервые введена Пуанкаре. Она предназначена для аналитического описания направленного графа электрической сети и отображает связь отдельных узлов в этой схеме. Матрица это прямоугольная матрица, число строк которой равно числу узлов графа , а число столбцов числу ветвей . Она обозначается следующим образом:
, , .
При этом номера строк соответствуют номерам узлов, а номера столбцов номерам ветвей. Элементы матрицы могут принимать одно из трех значений:
, если узел является начальной вершиной ветви ;
, если узел является конечной вершиной ветви ;
, если узел не принадлежит ветви .
Каждая строка показывает, какие ветви присоединяются к данному узлу схемы, а каждый столбец – какие узлы являются начальным и конечным узлами данной ветви. Таким образом, в графе, содержащем изолированные узлы, соответствующие строки матрицы будут содержать только нулевые элементы.
Условием правильности составления матрицы является наличие только одной положительной единицы и только одной отрицательной единицы в каждом ее столбце.
Для направленного графа, показанного на рис. 4.2, матрица будет иметь вид:
Матрица контуров служит для обобщенного аналитического описания различных совокупностей ветвей графа, образующих линейные замкнутые контуры. Матрица это прямоугольная матрица, число строк которой равно числу независимых контуров графа , а число столбцов числу ветвей . Она обозначается следующим образом:
, , .
При этом номера строк соответствуют номерам независимых контуров, а номера столбцов номерам ветвей.
Элементы матрицы определяются следующим образом:
, если ветвь входит в контур и их направления совпадают;
, если ветвь входит в контур и их направления не совпадают;
, если ветвь не входит в контур .
Каждая строка матрицы показывает, какие ветви входят в состав соответствующего независимого контура и какое направление имеют относительно направления контура. Каждый столбец той же матрицы показывает, в состав каких независимых контуров входит данная ветвь и совпадает ли ее направление с направлением эти контуров.
Условием правильности составления матрицы контуров, если все ветви входят в контуры, является наличие хотя бы одной положительной либо отрицательной единицы в отдельном ее столбце. Исключение составляют столбцы, которые содержат ветви, не входящие ни в один линейный замкнутый независимый контур графа. В этом случае столбцы матрицы будут содержать только нулевые элементы.
Для направленного графа, показанного на рис. 4.2, матрица будет иметь вид:
ПОЛУПРОВОДНИКОВЫЙ ЭЛЕКТРОПРИВОД
УСТАНОВИВШИЕСЯ РЕЖИМЫ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ ПРИ ПАРАМЕТРИЧЕСКОМ УПРАВЛЕНИИ
2.1. ОСОБЕННОСТИ И МЕТОДЫ РАСЧЕТА УСТАНОВИВШИХСЯ РЕЖИМОВ ПРИ УПРАВЛЕНИИ ОТ ПОЛУПРОВОДНИКОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Установившийся режим составляет, как правило, значительную долю в общем времени работы электрического двигателя. При традиционном рассмотрении установившийся режим является статическим и характеризуется постоянством электромагнитного момента двигателя и его скорости, т. е. dM/dt=0 и dQ/dt=0.
При параметрическом управлении асинхронным электроприводом от полупроводниковых преобразователей осуществляется дискретное воздействие на электропривод, приводящее к тому, что в течение периода переменного коммутируемого напряжения происходит последовательное изменение схем включения асинхронной машины и структуры управляемого объекта. Поэтому установившийся режим сопровождается электромагнитными переходными процессами, связанными с переключением вентилей, что приводит к изменению электромагнитного момента, а следовательно, и к появлению производной скорости во времени, т. е. при рассмотрении установившегося режима можно говорить лишь о постоянстве среднего момента Мср и средней скорости двигателя, так как момент двигателя помимо средней (постоянной) составляющей содержит еще и установившуюся периодическую (переменную, пульсирующую) составляющую, частота и амплитуда которой зависит от типа полупроводникового преобразователя, способа управления им и места его включения. Таким образом, в рассматриваемом случае имеет место установившийся динамический режим [29] с ненулевыми производными момента и скорости во времени, который часто называют квазистатическим, или квази — установившимся.
При исследовании таких режимов необходимо решать дифференциальные уравнения асинхронной машины, которые при изме — 24 няющейся скорости электропривода являются нелинейными и не имеют аналитического решения. Учитывая это, будем считать, что в установившемся режиме скорость электропривода постоянна (Q=const, dQ/dt=0), так как переменная составляющая момента из-за большой частоты пульсаций практически не может вызвать сколько-нибудь заметных колебаний скорости в квазистатическом режиме, когда момент нагрузки уравновешивается средним моментом двигателя.
Однако даже при £2=const возникают значительные трудности при аналитическом решении традиционными методами систем линейных дифференциальных уравнений, описывающих установившийся режим асинхронного двигателя. При использовании классического метода эти трудности связаны с необходимостью отыскания постоянных интегрирования из системы алгебраических уравнений высокого порядка. При операторном методе решение становится чрезвычайно громоздким из-за сложности определения начальных условий на расчетном интервале времени и необходимости стыковки решения систем дифференциальных уравнений, соответствующих различным схемам включения асинхронной машины.
В последние годы для расчета установившихся режимов асинхронных электроприводов при использовании различных схем преобразователей для фазового управления в статоре стал применяться метод переменных состояний, основанный на решении с помощью ЦВМ системы матричных линейных дифференциальных уравнений. Этот метод для схемы ЗТТ был предложен в [30], а для схемы ITT — в [31]. В дальнейшем он был использован и в других работах при анализе схем ЗТТ, ITT, ЗТД для фазового управления в статоре [32—37]. В этих исследованиях решение при Q=const доведено до получения закономерностей изменения мгновенных значений токов, напряжений, моментов и построения зависимости Mcp=f(t).
Метод переменных состояний при анализе установившихся режимов может быть распространен на все способы параметрического управления асинхронным двигателем (в частности, при управлении в статоре — на схему 2ТТ для Ф’У, на схемы широтно-импульсных преобразователей и схемы, обеспечивающие режим динамического торможения, а также на все схемы преобразователей, предназначенных для управления в роторных цепях, и системы комбинированного управления). Это позволяет создать единую теорию расчета квазистатических режимов асинхронных полупроводниковых электроприводов при различных методах параметрического управления и определить показатели и характеристики установившегося режима работы электропривода, в частности рассчитать законы изменения мгновенных значений момента, фазных напряжений и токов статора и ротора; рассчитать средний момент двигателя, частоту и амплитуду пульсаций момента; произвести при необходимости гармонический анализ токов и напряжений двигателя; определить величину действующего тока;
оценить неравномерность загрузки отдельных фаз двигателя (если она имеет место), рассчитать энергетические показатели электропривода (КПД, коэффициент мощности, дополнительные потери в обмотках двигателя при питании несинусоидальным током) и т. д. Использование единой теории и общих расчетных методов для различных систем параметрического управления в статорных и роторных цепях позволяет обоснованно произвести их сравнительную оценку и определить наиболее рациональные схемы преобразователей.
Рассмотрим особенности расчета установившихся режимов на основе метода переменных состояний. Для их описания используются дифференциальные уравнения обобщенной двухфазной машины переменного тока [38—40], полученные при общепринятых допущениях (не учитываются насыщение, потери в стали, высшие гармоники магнитного поля; воздушный зазор принимается равномерны^ напряжение питания является симметричной системой синусоидальных напряжений). Предполагается также, что параметры роторной цепи приведены к статорному контуру.
При рассмотрении работы асинхронного двигателя совместно с полупроводниковым преобразователем будем считать, что вентильные элементы (диоды, тиристоры, транзисторы) имеют идеализированные характеристики и используется так называемое симметричное управление преобразователями, когда значения а (у) для тиристоров (транзисторов), включенных в разные фазы, равны между собой. Обычно дифференциальные уравнения асинхронного двигателя записывают в относительных единицах, используя в качестве базовых следующие величины: 1) для напряжения U6=Um<i> n, где Um ф n — амплитуда номинального фазного напряжения статорных цепей; 2) для тока /б=/тф^, где /тфл? — амплитуда номинального фазного тока статора; 3) для активных, индуктивных И ПОЛНЫХ сопротивлений Zb=Utlh 4) для скорости Q6=fi0, где £2о=2я/о — угловая частота напряжения питающей сети; 5) для времени ^б=1/^б=1/^о; 6) для потокосцеплений W6==U6t6—U6/^6′, 7) для индуктивностей £б=^б//б==£/б/&о/б= =Ze/^б; 9) для активной, реактивной, полной мощностей Рб= =£1Лг=3£/флг/флг=3/2£/б/б, где Sin — номинальная полная мощность двигателя, иФы и Iфы— номинальные действующие фазные напряжения и ток статора; 9) для моментов Мб=РбРп/&б— =3/2Ч/‘б/брп; 10) для моментов инерции Іб=Мбібрп=РбРп2/&б3. В дальнейшем в гл. 2—4 будем применять при описании асинхронной машины принятые относительные единицы, оговаривая переход к абсолютным единицам или к относительным единицам при других базовых величинах. Введем специальные буквенные обозначения для относительных значений времени, скорости и момента: ‘t=t/t6=tQo, o)—Q/Q,6=Q/Q0, т=М/Мь, а остальные от — носительные единицы будем обозначать так же, как и абсолютные.
Исходные уравнения, записанные через проекции обобщенных векторов на ортогональные оси и, и, вращающиеся с произвольной
скоростью, имеют следующий ВИД [39]
Uus — Rjus ~Ь D’Pи
uvs ~ *As + DWVS — f — сок^Ы5; Wur’-= ^2кг + DWur — (coK — CO) Wvr uvr~ ^2ivr 4~ DWvr -f — (coK — to) Wur,
«Л*;
где сок — угловая скорость координатных осей; D — символ дифференцирования по времени; Uus, uvs (uUr, War) — проекции на оси W, v обобщенного вектора напряжения статора (ротора); ius, ivs (iur, /иг) — проекции на оси и, и обобщенного вектора тока статора (ротора) ; Ч^, ‘Ft,* (4V, ^иг) — проекции на оси и, v обобщенного вектора потокосцепления статора (ротора); /?і(і? г)—активные сопротивления статорных (роторных) цепей.
Пространственные обобщенные векторы могут быть записаны в комплексной форме в системе координат и, v, если известны их проекции на эти оси, следующим образом:
x=xu+jx v—xe’y‘t (2.2)
їм = W + xv> tgY = xjxu, (2.3)
где x — обобщенный пространственный вектор (Us, Ur, is, ir, Ws,
Jr).
Формулы прямого и обратного преобразования устанавливают связь между фазными величинами трехфазной асинхронной машины и проекциями обобщенного вектора двухфазной машины [39]. Формулы прямого преобразования имеют следующий вид:
= 2/3 ] xas cos coK*c-f^s cos (сокт— 2*/3)-|-*M cos (сокт+ 2it/3) I; j xvs=—2/3 [ sin coKT 4- Xbs sin (coKT—2Tt/3)-j-^cs sin (cort+ 2it/3)]; |
*ur = 2/3 {Xar cos (coK — со) X — f xbr cos [(сок со) t 2*/3] +
-f xcr cos[(toK — со) T — f 2*/3]}; xvr = — 2/3 {xar sin (coK — CO) 14- xbr sin [(coK — со) X — 2*/3J +
+ Xcr sin[(coK — CO) T + 2it/3]},
где Xas, Xbs, Xcs (Xar, Xbr, Xcr) — фаЗНЬІЄ ЗНаЧЄНИЯ СТЭТОрНЫХ (pO-
торных) величин; xus, xvs (xur, xvr) — проекции обобщенных векторов статора (ротора).
Фазные величины трехфазной асинхронной машины определяются по формулам обратного преобразования: для статора
•Xas = хus C0S юкт — Xvs Sin СОкт;
Xbs = Xus COS (coKx — 2it/3) — xvs sin (coKT — 2ti/3) ; XC8 = Xus COS (coKT-f 2-ге/З)— *us sin (coKT — f 2«/3);
для ротора
xcr— Xur C0S (®к — со) х — AV sin (0)К — со) х;
хьг = хиГ cos 1(сок — (о) х — 2тг/3| — x,,r sin [(сок — со) х — 2n/3J;
ЛсГ = лыГ cos[(сок — СО) X — f 2ії/3] — xvr sin [(сок — со) X -|- 2*/3].
Связь между потокссцеплепиями и токами выражается с помощью уравнений вида
/5 “f»
Hі — ^-‘4’vT’ іГ “І — ^0 or “І — ^Jo^vs‘>
где Ls=Li+^o—индуктивность фазы статора, учитывающая магнитную связь с другими фазами статора; Lr—L2—Lo — индуктивность фазы ротора, учитывающая ее магнитную связь с другими фазами ротора; L{L2)—индуктивность рассеяния фазы статора (ротора); Lo=3/2Mi2 — взаимная индуктивность между фазой статора (ротора) и всеми фазами ротора (статора); М2 — максимальная взаимная индуктивность между фазой статора и ротора.
Подставляя (2.7) и (2.1), получаем систему дифференциальных уравнений:
s I LsDius —j— L ()Dinr a>JLsivs coKL 0ivr, vs 4“ LsDLds. — f~ (iLsius — j-
иґ I LrDilir ] Li:Di[is (coK CO) Lriv,. (сок со) Lnivs, vr “b LrDivr ■— L0Divs — j — (сок — со) Lriur — f — (coK — со) L0ius.
Электромагнитный момент, развиваемый двигателем, быть определен из выражения
т — и ( Іиг Іvs iusivr) •
Исходная система (2.8), которая при co=const является линейной, видоизменяется в зависимости от схемы включения машины. Однако при общем рассмотрении она может быть записана в матричной форме
U= RI-f-LDI,
где U =||«us, uvs, uur, uvrT — вектор напряжения асинхронной машины; l = ||*ws, ivs, iur, ivrT — вектор токов асинхронной машины; L, R — квадратные матрицы коэффициентов 4X4, зависящие от параметров машины, скорости двигателя, угловой скорости координатных осей и схемы включения.
Фазные напряжения питающей сети описываются следующими выражениями:
иА — cos т; ur — cos (х
ис = cos (т —{— З-к/З).
Введем в рассмотрение обобщенный вектор напряжения питающей сети
U]y — UuN-{-jUvN, (2.12)
где ииn, uvn — проекции вектора uN на ортогональные оси и, v. Используя (2.3), (2.4), (2.11), получаем
= COS (1 —(DK) x;
= sin (1 —(0i:) г;
/ (1—»K) t
Входным вектором системы является вектор uN, а его компоненты— это проекции uN на ортогональные оси, т. е. U^ = ||«uat,. uvNT. Очевидно, существует связь между векторами U и Uas.
в общем случае, как показывает анализ, U является функцией U^ и координат вектора I:
U = NUjv+P£I+KI, (2.14)
где N — матрица коэффициентов размера 4X2; Р, К—матрицы
коэффициентов размера 4X4.
Вид этих матриц зависит от схемы включения машины. Подставляя (2.14) в (2.Т0)7^лучавм
NUn+PDI+K* = RI+LDI. (2.15)
Приведем уравнение состояния асинхронного двигателя (2.15) к нормальному виду:
D =—B-TI+B-WUiv, (2.16)
где матрица B=L—Р, F=R—К. Для того чтобы перейти к решению однородного дифференциального, уравнения, введем обобщенный вектор состояния
компонентами которого являются проекции на ортогональные оси и и v обобщенных векторов тока статора, ротора и напряжения питающей сети.
Как следует из (2.13),
° _(! «,„) ц ни (218)
(1—(0К) О
Зависимость производной вектора Ujv от обобщенного вектора состояния V можно представить в следующем виде:
DUjv=OI+HUjv, (2.19)
где 0 — нулевая матрица размера 2X4.
С учетом (2.16) и (2.19) получаем
D=AV, (2.20)
—В-1? B-1N О Н
— характеристическая квадратная матрица коэффициентов размером 6X6.
Решение однородного дифференциального матричного уравнения (2.20) можно записать в следующем виде:
V(x) = eAt V (0), (2.21)
где V (0) — начальный обобщенный вектор состояния системы; еКх — расширенная переходная матрица системы, так называемый матричный экспоненциал.
Матричный экспоненциал определяется как сумма ряда
eA’ = E + Ax+<^i+(-^!l+…=|J<^i, (2.22)
1=0
где Е — единичная квадратная матрица размером 6X6.
Вычисление (2.22) производится на ЦВМ. Обычно для определения еАт достаточно вычислять 8—10 членов ряда [30].
В установившихся режимах из-за периодичности процессов и симметричности компонент вектора V его составляющие, т. е. обобщенные векторы un, is, ir, обладают так называемой £-такт< ной симметрией [30, 37], т. е. годографы этих векторов, являющиеся за период коммутируемого переменного напряжения ти замкнутыми кривыми, состоят из g одинаковых тактов, длительность каждого из них xT—xu/g. Такты можно совместить друг с другом поворотом на угол тu/g. Следовательно, существует такой расчетный интервал времени тр=тт, обычно меньший, чем период переменного напряжения т«, для которого выполняется следующее условие:
«А, (‘ + *р) = е‘(‘ «К> к (т),
|^ + ‘р) = ^<|-‘к, ЧМ. | (2.23)
Условие периодичности может быть записано и для обобщенного вектора состояния
V (т-f-Tp) = TV (т), (2.24)
где Т — квадратная матрица размера 6X6.
Эта матрица может быть представлена с использованием квадратных подматриц 0 и S размера 2X2:
|
S |
0 |
0 |
|
|
т = |
0 |
S |
0 |
|
0 |
0 |
S |
COS (1 свк) хр, — sin (1 — CDh)xp sin (1 — (0K)xpi COS (1 (DK) xp
Значение Тр зависит от способа параметрического управления, типа полупроводникового преобразователя и места его включения (в статорные или роторные цепи).
На отрезке тр, отсчитываемом от времени т0 (принятого за начало расчетного интервала) до времени тк (тр=тк—то), содержится k интервалов времени, соответствующих различным схемам включения машины. Границами этих интервалов являются моменты времени то, ті, Т2, …,тк. На /-м интервале ATj=T7-—т7-і решение для V (т) имеет вид
(2.27)
где А і — матрица коэффициентов, соответствующая схеме включения асинхронной машины на отрезке Лт?.
В силу непрерывности обобщенного вектора состояния системы значение вектора V(tj) в конце интервала Дт3 является начальным значением для следующего Лт/+і интервала. С учетом этого можно записать функциональную зависимость между значениями вектора V (т) в конце и начале расчетного периода тР:
/=і
Л (хгхі-
V^
i=k
где П — знак произведения.
Так как значения V(tK) и V(to) связаны соотношением (2.24), получаем
WV(t0)=0, (2.29)
где
W = Т — J] еК’1 Xi-x).
i=k
Из (2.29) может быть определен вектор начальных условий V (то) для расчетного интервала тр, а также, если это необходимо, и время то, принимаемое за начало отсчета. Мгновенные значения вектора V(t) на интервале тР определяются с помощью
(2.27) , на остальных участках времени — с использованием (2.24).
Таким образом, при исследовании установившихся режимов
полупроводниковых асинхронных электроприводов с использованием метода переменных состояний необходимо определить:
1) целесообразную скорость вращения координатных осей сок;
2) расчетный интервал тр, удовлетворяющий условию (2.24), и То — время начала отсчета тр; 3) количество различных схем включения двигателя на отрезке тр и матрицы А} для этих схем;
4) длительность отдельных интервалов Ат/, в течение которых реализуется та или иная схема включения машины; 5) вектор начальных условий V(to); 6) мгновенные значения вектора V(t) на расчетном интервале тр.
Как видно из описания алгоритма, расчет установившихся режимов на основе метода переменных состояния выгодно отличается от обычных численных методов решения на ЦВМ системы дифференциальных уравнений, так как позволяет сразу же получить решение для установившегося режима при рассмотрении только отрезка времени тр, обычно меньшего, чем период переменного напряжения. Эти особенности расчета существенно сокращают машинное время.
Располагая мгновенными значениями вектора V(t), можно рассчитать показатели, характеризующие установившийся режим работы электропривода.
Проекции обобщенных векторов токов статора и ротора (iUs, ivs, iur» ivr) являются компонентами вектора V, закон изменения которого во времени известен.
Проекции обобщенных векторов ПОТОКОСЦЄПЛЄНИЙ (Wms, ‘Fws, lFMr, Ч^г) определяются с помощью (2.7).
Проекции обобщенных векторов напряжений (uus, Uvs, Uur, uvr) при известных Ujv и I рассчитываются с использованием (2.14). Формулы обратного преобразования (2.5), (2.6) позволяют определить фазные токи и напряжения.
Зная закон изменения мгновенных фазных значений статорных и роторных цепей, можно найти действующие значения токов и напряжений в отдельных фазах и произвести гармонический анализ этих функций. Если при работе вентильного преобразователя трехфазная система напряжений и токов, питающих двигатель, несимметрична^ то необходимо рассчитывать гармонические доставляющие к а ж доїї~<фНЗБГГгГ ]зат|!М^^ и ч —
ных составляющих для гармоник одного номерга;—определять составляющие прямой и обратной последовательностей.
Если токи, протекающие по обмоткам статора (ротора), различны, то определяется их действующее значение для каждой фазы статора (ротора).
Закон изменения электромагнитного момента во времени т= = /(т) определяется по (2.9). Средний момент (постоянная составляющая)
![]()
Положительная и отрицательная амплитуды (+Лт, —Ат) переменной составляющей момента могут быть рассчитаны следующим образом:
+А т=ттах—тсР; (2.32)
—Am=mmin—mcp, (2.33)
где пітах{іПтіп)—максимальное (минимальное) значение момента на отрезке тР.
Из-за периодичности процессов в установившемся режиме удовлетворяется условие т(т+тР) =т(т), т. е. периодом функции т(т) является тР. Отсюда следует, что частота пульсирующей составляющей момента
/п = (2.34)
тр
Для обобщенной характеристики пульсирующего момента можно ввести в качестве показателя q наибольшее значение интеграла переменной составляющей момента:
и *
J (т — тср) di
где т’ и т — моменты времени, соответствующие условию т(т’) = пг(т») =imcp. Значения т’ и т выбираются таким образом, чтобы значение q было максимальным.
Используя общие методы определения активной (Р), реактивной (Q) и полной мощности (5) в трехфазных цепях переменного тока при управлении от вентильных преобразователей [41], можно получить выражения для коэффициента мощности kM и коэффициента полезного действия т] при синусоидальном напряжении питающей сети:
•Sj.— 2/3 (las «f — Ics)’>
PX=V2/3 (Ilas cos cpla 4- /l6s cos <p1/; + /lcs cos <plc);
^ ^ і I las coS Via Ч~ I lbs cos fib Ч~ Iics cos Yl с.
Si ~ ^(4+4+4)
r, = A=_ ^ (2.38)
Pi /2 (/,
as
cos yia + Ilbs COS <p1& + /lcsCOS <flc)
где Pi и Si — активная и полная мощность, потребляемая из сети переменного тока трехфазной нагрузкой: has {libs, hcs) —действующее значение первой гармоники тока фазы а (Ь, с) статора; фіа(фіь, фіс) — фазовый сдвиг первой гармоники статорного тока фазы а (Ь, с) по отношению к напряжению фазы Л (В, С) питающей сети; Ias {lbs, hs)—действующее значение тока фазы а {Ь, с) статора; Р2 = тсРсо — механическая мощность на валу асинхронного двигателя.
![]()
Определение kM и і) упрощается, если статорные токи отдельных фаз двигателя симметричны. В этом случае I{as=Ilbs=Ilcs=
==Ils] фіа==фіЬ==:фіс==:фЬ Ias== Ibs== Ics== Is
4= —————-
[/ 2 Ils cos <pt
где kK=Iis/Is — коэффициент искажения.
Для оценки нагрева обмоток двигателя высшими гармониками тока при несинусоидальном питании целесообразно ввести так называемые коэффициенты перегрузки по току статора knа—
===Ias/Ilas, knlb == Ibs/Ilbs, knlc—I c, s 11 cs И pOTOpa ^n2a==^ar/^lar, kn2b=z I br! Ibri ku2c== I cr 11cr, ГДЄ /аг» Лу(-Лаг> І br, Асг) ДЄИСТ-
вующие значения тока (первой гармоники тока) фаз ротора.
В симметричных режимах величины kn для отдельных фаз статора (ротора) одинаковы, т. е. kni=Is/hs, >kn2 = 1гЦг-
Рассмотрим особенности исследования установившихся режимов полупроводниковых асинхронных электроприводов при использовании преобразователей различного типа.
Регулятор мощности тристорного типа используется для оперативного изменения подводимого к нагрузке уровня мощности. Достигается изменения задержки включения за счет задержки момента включения тиристора. Тиристор работает только при наличии сигнала на …
Электроприводы механизмов непрерывного действия работают в продолжительном режиме, поэтому при необходимости регулирования их скорости целесообразность использования преобразователей напряжения определяется, особенно при управлении короткозамкнутыми асинхронными двигателями, зависимостью момента статической нагрузки от …
Задачи удовлетворения электроприводом технологических требований при рассмотрении механизмов указанного класса сводится обычно к необходимости реализации заданной тахограммы повторно-кратковременного режима работы (в качестве типовой примем диаграмму скорости рис. 5.2). Для двигателей …