С проблемой, когда квадрокоптер тянет в сторону, можно столкнуться при испытании нового дрона или очередном запуске старого. Обычно неполадка легко поддается исправлению без обращения в сервисный центр.
Почему квадрокоптер тянет в сторону
Ситуация, в которой квадрокоптер кренит набок или не взлетает, очень распространенная проблема. Вызывают неполадку несколько причин:
- Неправильные настройки. Перед отправкой в магазины дроны подготавливают для полета, но в процессе многочисленных транспортировок калибровка может сбиться.
- Слишком туго насажен один из винтов. Если при сборке допущена ошибка, и какой-то пропеллер вращается с большим усилием, нежели остальные, квадрокоптер будет тянуть в сторону.
- На ось двигателя в месте крепления винта намотались нитки, травинки или волосы. Такое часто случается со старыми дронами — сам пропеллер в порядке, но лишние элементы тормозят его вращение.
Еще одна причина, по которой квадрокоптер может тянуть в сторону, это ошибка при самостоятельной замене винта. Хрупкие пропеллеры часто ломаются, для устранения поломки необязательно обращаться к профессионалам — детали стоят дешево и не являются дефицитом. Однако многие пользователи в процессе ремонта подбирают неправильный винт с вращением в обратную сторону. Соответственно, в процессе полета один из пропеллеров толкает воздух не в том направлении, и дрон начинает тянуть вбок.

Что делать и как исправить, если квадрокоптер при взлете тянет в сторону
Если при испытании выяснилось, что дрон тянет в сторону, и летит он неровно, необходимо посадить устройство на землю и провести внимательный физический осмотр. Пошаговый алгоритм предлагается следующий:
- Винты квадрокоптера аккуратно прокручивают пальцами. Если один из пропеллеров вращается медленнее других и с ощутимым усилием, необходимо снять его и посмотреть, нет ли загрязнений на оси двигателя.
- Любой налипший мусор, травинки, шерсть и нитки, из-за которых квадрокоптер тянет в сторону, нужно снять. После этого винт устанавливают обратно, при необходимости заворачивая менее плотно, и еще раз прокручивают пальцами. Если он идет свободно, то, скорее всего, коптер в полете перестанет тянуть в сторону.
- Дрон ставят на ровной поверхности и снова пробуют запустить в воздух. Для старых квадрокоптеров механической чистки обычно оказывается достаточно.
Совет! Если винты дрона недавно приходилось менять, следует еще раз проверить направление вращения купленных пропеллеров и при необходимости переустановить их повторно.
Как провести триммирование для квадрокоптера
Если квадрокоптер летит в бок, делать нужно в первую очередь проверку его механической исправности. Но когда отладка винтов не дает результатов, и дрон продолжает тянуть в сторону, остается провести автоматическую калибровку устройства. Выполняют ее по такой схеме:
- На пульте управления коптером находят кнопки или колесики, отвечающие за триммирование.
- Дрон запускают в работу и поднимают устройство в воздух отведением левого стика вниз.
- Набирают небольшую высоту и определяют, в какую именно сторону продолжает тянуть неисправный коптер.
- При наличии крена вправо триммируют дрон влево и наоборот.
- Проводят настройку до тех пор, пока устройство не начнет двигаться совершенно ровно.
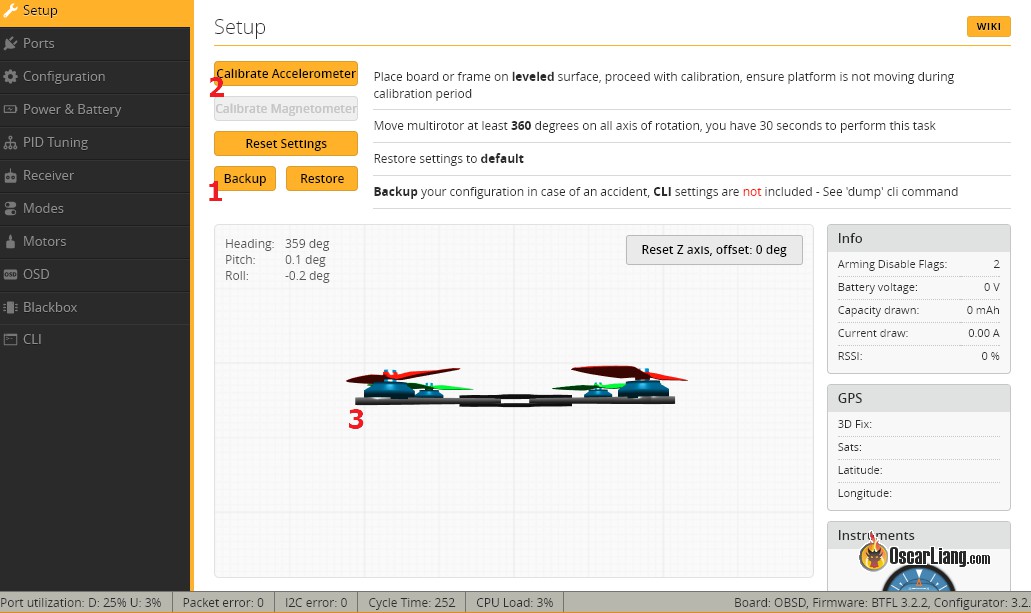
Если новый квадрокоптер заваливается в сторону при взлете, для начала можно попробовать просто сбросить заводские установки и провести калибровку гироскопа и акселерометра. Для этого аппарат размещают на ровной поверхности, включают и отводят оба стика сначала вниз и влево, а затем вниз и вправо. Об успешно выполненной настройке коптер сообщит светодиодным или звуковым сигналом.

Заключение
Неполадка, когда квадрокоптер тянет в сторону, встречается очень часто, но обычно не свидетельствует о серьезной неисправности. В большинстве случаев крен устраняется калибровкой или механической чисткой аппарата.
День добрый всем!
Дано — 5’ коптер самосбор. ПК mamba f722. Betaflight 4.2.
Как правило все ок, но иногда бывает следующее. Обычно, когда аккум подключен, коптер на земле, мы его армим, моторы начинают легко крутиться на холостых. Легко и тихо.
Но иногда, после арма, моторы крутятся заметно быстрее и шумнее, коптер чуть наклоняется по роллу в какуто сторону (это видно по видео в очках). Но при этом стоит на месте, не движется. Если после этого взлететь, то коптер в полете сильно тянет в сторону, обычно по роллу он наклоняется и летит вбок, приходится постоянно подруливать. Если такая фигня происходит после арма, то дизарм/арм не спасает. Приходится перетыкать аккум, иногда несколько раз.
Если после арма холостые норм, то можно смело летать, в полете ничего не сбивается.
Летаю только в акро, поэтому акселерометры и все прочее отключено.
Что это может быть?
Так как никто не ответил, проблема решилась так. Выяснилось, что гироскоп иногда глючит. Поэтому, если при арме виден был описанный глюк, делал дизарм и калибровку гиры стиками. После калибровки все было ок.
Так как никто не ответил, проблема решилась так. Выяснилось, что гироскоп иногда глючит. Поэтому, если при арме виден был описанный глюк, делал дизарм и калибровку гиры стиками. После калибровки все было ок.
Подскажите пожайлуста, у меня такая же проблема. Какая комбинация стиков для калибровки гирокомпаса?
Собрал свой первый квадрокоптер на 250 раме, omnibus f4, пульт Taranis q7. Выбрал безветренный солнечный день, безлюдное место. Сердце учащенно бьется перед первым запуском. И вот запуск, спутники почему долго ловил, не дождался, решил взлетать. Взлетел квадрик поднялся и полетел вперед, стиками кое как вернул назад. выключил двигатели он упал на песок. Решил еще раз попробовать, спутники так и не нашел. Взлёт опять такая же ситуация, уводит вперед. Опять падение. Вопрос, нигде не могу найти комбинацию стиков для Taranisa, для калибровки компаса и акселлиометра. Почему спутники очень долго ловятся, причем именно от батареи, если подключить квадрик к компу USB шнуром, то спутники ловятся быстрее
Какая комбинация стиков для калибровки гирокомпаса?
Можно в конфигураторе сделать
или стиками
Сегодня вырвался запустить свой квадрокоптер, взлетел в режиме стабилизация, GPS поймал спутники, квадрик взлетел и опять тянет в сторону, причём болтается то вверх то вниз. Падает на землю, регулируют стика отклонение, опять взлёта, начинает сносить в другую сторону, и опять то взлетит, то опять к земле. Газу дашь, он вверх поднимается и его уносит в сторону. В каком режиме надо летать чтобы он чётко высоту держал, почему его колбасит то вверх то вниз. Уже думал за леску привязать, чтобы снос отрегулировать.
В каком режиме надо летать чтобы он чётко высоту держал, почему его колбасит то вверх то вниз.
А на какой прошивке у Вас коптер: inav, Betaflight?
Почему спутники очень долго ловятся, причем именно от батареи, если подключить квадрик к компу USB шнуром, то спутники ловятся быстрее
Потому что при подключении по USB не работает остальная периферия, которая может давать наводки: камера, передатчик и т.д.
А на какой прошивке у Вас коптер: inav, Betaflight?
У меня прошивка стоит Betaflight 4.2.6
У меня прошивка стоит Betaflight 4.2.6
Ну, в Бетафлае как бы нет режима удержания высоты…, как и остальных навигационных режимов, за исключением GPS rescue, который использует GPS без компаса.
Если ваш квадрокоптер резко улетает в какую-либо сторону, дёргается или вообще теряет управление – эта статья для вас.
Сложно недооценить важность правильной предполётной подготовки квадрокоптера. Прежде чем взлететь, вы должны в первую очередь откалибровать гирокоптеры дрона. Кроме того, нужно связать с квадрокоптером пульт управления. И наконец, когда квадрокоптер уже поднимется в воздух, вам могут понадобиться дополнительные подстройки триммеров, чтобы тот мог зависнуть на одном месте. Этот процесс в целом одинаков для большинства недорогих квадрокоптеров.
Подготовка к полёту
1. Вставьте аккумулятор в квадрокоптер, но пока не включайте его (если у вашего дрона встроенная батарея, то пропустите этот пункт).
2. Разместите квадрокоптер на ровной поверхности. Очень важно, чтобы поверхность была без уклонов, иначе вам не удастся выполнить калибровку.
3. Включите квадрокоптер. Вы можете также включить квадрокоптер, держа его в руках, но после включения вы должны немедленно поставить его на ровную поверхность. У большинства моделей синхронизация гироскопов начинается через несколько секунд после включения. Уберите руку и не трогайте квадрокоптер в течение десяти секунд. За это время гироскопы включатся и откалибруются.
Соединение пульта управления с квадрокоптером
Теперь настало время связать пульт управления с вашим квадрокоптером. В разных моделях этот процесс осуществляется по-разному, и возможно, вам придётся обратиться к инструкции. Однако для большинства недорогих моделей необходимы следующие действия.
3-осный (3-axis) квадрокоптер
Просто включите пульт и подождите около семи секунд. Он может издавать повторяющиеся сигналы. Длинный сигнал будет означать, что пульт связался с квадрокоптером.
6-осный (6-axis) квадрокоптер
Включите пульт управления. Поднимите стик газа вверх до максимума и опустите вниз. Вы услышите звуковой сигнал, который означает, что пульт был успешно привязан к квадрокоптеру.

Подстройка
Взлетите на несколько десятков сантиметров над землёй. Понаблюдайте, не смещается ли квадрокоптер вперёд-назад или вправо-влево. При этом игнорируйте любое движение, вызванное ветром.
Если квадрокоптер непроизвольно сдвигается в какую-либо сторону, исправьте это соответствующим триммером (назначение кнопок триммеров вы можете найти в инструкции). К примеру, если квадрокоптер “дрифтует” вправо, нажимайте левый триммер, пока дрифт не прекратится.
Кроме того, в любой момент вы можете перенастроить гироскопы. Для этого посадите квадрокоптер на ровную поверхность и сведите оба стика вниз-вправо. Для разных моделей может понадобиться разная комбинация (к примеру, свести оба стика влево или вниз друг к другу). Вы узнаете, что гироскопы перенастроены, когда светодиодная подсветка квадрокоптера несколько раз “моргнёт”.
Теперь пора переходить к полётам! Загляните в нашу – там вы найдёте много обучающих статей о том, как правильно управлять дроном.
Как и любому другому сложному техническому устройству с большим количеством механических деталей, подверженных постоянным нагрузкам, квадрокоптерам, иногда, свойственно ломаться.
Для того, чтобы вы, при первой же поломке квадрокоптера, которую вполне можно устранить своими силами, не теряли голову и не мчались в пункт ремонта, мы и подготовили данную подборку, в которой вы найдете основные неполадки квадрокоптеров, а также способы, которыми их можно устранить.
1. Нет связи передатчика и квадрокоптера. Вероятнее всего ручка газа не стоит на положении минимум. Установите ее до упора на себя и не трогайте до тех пор, пока не будет завершена инициализация квадрокоптера.
2. Погас и/или не загорается индикатор на передатчике. Это означает, что батарейки полностью разрядились и необходимо их заменить на новые.
3. Система стабилизации квадрокоптера работает плохо или неправильно. Вероятнее всего были неправильно инициализированы начальные настройки. Посадите квадрокоптер на ровную поверхность и подождите некоторое время, после чего осуществите повторный взлет. Также на плохую работу стабилизации квадрокоптера оказывает влияние низкое напряжение от разряжающегося аккумулятора.

4. При полетах квадрокоптера или запуске двигателей наблюдаются посторонние шумы и вибрация. Вероятнее всего имеются повреждения корпуса или пропеллеров.
5. Квадрокоптер не может оторваться от земли и взлететь. Такая ситуация наблюдается при неправильной установке винтов или двигатель. Внимательно проверьте маркировку каждого из них и сравните со схемой, которая приводится в руководстве пользователя вашей модели квадрокоптера.
6. Оказал двигатель. Проверьте провода, идущие к двигателю и контакты. Если с ними все в порядке, то двигатель сгорел и его необходимо заменить на новый. Также проблема может быть и более сложной и скрываться в регуляторе скорости и полетном контроле. Их также следует проверить и, при необходимости, заменить.
7. После того как квадрокоптер потерпел крушение, вал одного или нескольких двигателей вращаются со скрежетом и чрезмерным усилием. Аккуратно надавите на вал двигателя а, затем, потяните на себя. В том случае, если он продолжит работать неправильно, придется менять весь мотор.
8. После неудачной посадки или встречи с препятствием сдвинуты лучи. Скорее всего ваша модель квадрокоптера оснащена ударопоглощающей конструкцией и сдвинуть лучи в первоначальное положение следует руками, после чего необходимо нажать на соответствующие защелки.

9. Не получается выполнить сложные фигуры в воздухе, в частности, кульбит. Скорее всего вам следует включить режим эксперта. Также проверьте уровень заряда аккумулятора – возможно квадрокоптеру просто не хватает мощности.
10. Квадрокоптер слишком чувствителен к командам, поступающим с пульта дистанционного управления, из-за чего полет получается резким, а управление не комфортным. Здесь, напротив, вам не хватает опыта управления, и режим эксперта следует сменить на другой, с более низкой чувствительностью управления.
11. Во время полета квадрокоптер постоянно сносит в одну из сторон. Эта проблема явно указывает на неправильную калибровку. Установите квадрокоптер на столе или любой другой ровной поверхности и подложите подкладку из нескольких листов бумаги или тонкий картон под тот луч, в сторону которого квадрокоптер отклоняется в полете. После того как калибровка будет произведена вновь, проблема должна исчезнуть.
12. Качество видео с квадрокоптера плохое. Во-первых, выбирайте модели квадрокоптеров с хорошей современной оптикой, а, во-вторых, используйте качественные карты памяти от известных производителей.
Месяц назад мы приобрели квадрокоптер DJI Phantom 3 Advanced. Аппарат доставляет массу удовольствия всей семье, особенно, когда после полёта возвращаешься домой и просматриваешь записи с высоты на большом экране. Но самые сильные эмоции мы испытали, когда дрон терял управление.
Вообще, при покупке такого аккуратненького, красивенького и технологичного вертолётика руки чешутся запустить его ввысь немедленно. Я не отношу себя к самым безбашенным экспериментаторам, но всё, что мне поначалу хотелось узнать из руководства по эксплуатации — это как запустить двигатели и на что влияют рычажки на пульте. Так как до этого имелся небольшой опыт управления маленьким дроном, похожим на Syma , то уж с Фантомом, казалось, проблем управления быть не должно.
Обо всяких разных дронах, в том числе и на ГТ, пишут довольно много. Но, спустя месяц эксплуатации, хочу отметить, что в статьях обычно не встречается того тёплого ощущения, которое вызывает подобный «питомец». Он действительно воспринимается как довольно послушное домашнее животное, которое иногда капризничает и попадает в различные неурядицы. Поэтому попробую рассказать о том, как взять дрона на ручки, чтобы всем было спокойнее. Если читать лень, то можно просто посмотреть видеоролик в конце.
Интересную мысль высказал в своём интервью один дизайнер из нашей компании. Суть в следующем: все эти гаджеты и виджеты вокруг нас формируют отличную от натуральной действительность, по-нашему — дополненную реальность. Если взрослые люди ещё как-то осознают, где и что, то детишки приходят в этот мир, наполненный дронами, планшетами и прочей техникой, ощущая его, наверное, вполне себе целостно. Конечно, я успел помечтать о сооружении квадрокоптера своими руками. К своему творению у меня вряд ли осталось бы такое детское любопытство, какое возникает к сложной китайской поделке. Фантом от DJI возник в моей жизни весьма спонтанно, словно доселе невиданное физическое явление, которое хотелось бы не только использовать по назначению, но и познавать как бы изнутри. Следует сразу подчеркнуть, что килограммовая машина с мощными пропеллерами действительно опасна со всех сторон. Однако опасность, как известно, резко снижается в процессе освоения аппарата, особенно, освоения на грани безопасности.
Естественно, в инструкции напишут, мол, не подлетайте к людям и животным. Не будут же они расписывать, как выкручиваться, если квадрокоптер снесло к людям неожиданным порывом ветра. Напишут и о том, что не следует запускать в ветреную погоду, но внизу ветра может и не быть, а на высоте в сто пятьдесят метров он уже окажется значительным. Так что люди, как ни крути, всё это волей-неволей изучают. И волей, как показывает опыт, гораздо эффективней и интереснее.
Кто-то скажет, что цена летающего гаджета сама по себе ограничивает фантазию на эксперименты, но, даже если этот «кто-то» в большинстве, то дронов, убитых в первом же полёте, всё равно уже не вернуть. И вообще, разве какие-то там презренные деньги могут охладить пыл настоящего русского естествоиспытателя? Тем более, уже потраченные деньги.
Меня лично остановили чисто технические препятствия: батарейка в коробке была заряжена всего на 20%, и приложение DJI Go почему-то не показывало видео с камеры на моём престарелом смартфоне. Пока разбирался с видео, батарейка села ещё больше. Так что с первым полётом Фантом у меня выше полутора метров от земли не оторвался.
Дальнейшие ковыряния с видео привели к мысли обновить прошивки. Затем настала ночь, а за ней — рабочий день. Вот когда мне посчастливилось прочистить мозги от перехватывающей дыхание тяги устремиться в небо на всех парусах.
Так вот, прежде чем запускать новый квадрокоптер в опасные трёхмерные путешествия, я настоятельно рекомендую
не мануалы читать, а посмотреть на Ютюбе видео падений и других неприятных ситуаций с мультикоптерами. Я-то просто собирался глянуть, как люди летают, точнее, пилотируют дронов, но глаз сам зацепился за картинки с подписями вида «phantom crash». После таких роликов инструкции уже не читаются, а как бы перечитываются в поисках важных сведений. Поэтому к вечеру я был спокоен и уравновешен. Летать, как полагается, начал в режиме новичка. А когда отключил его, поначалу значительно ограничивал высоту и дальность полёта.
Более всего впечатлили видео, показывающие, как Фантом уносится в неизведанное, подхваченный сильным ветром . Есть в них какая-то тревога и безнадёжность, которая не чувствуется в подборке забавных падений и столкновений. Успокаивает только одна мысль: «Если видео выложили, значит, дрон с бортовой флэшкой таки нашёлся». Но снова тревожит другая: «А что если нашёл его кто-то другой? А что если выжила только флэшка?» Честно говоря, мы тоже уже запускали при значительных скоростях воздушных потоков, но дрон, отметим, противостоит им весьма уверенно. Трудно представить, какие ветра имели место дуть в приведённых видео. Там, небось, оператора самого сносило, а он ещё дроном пытался управлять. Хотя, ещё раз, верховые воздушные течения могут сильно отличаться от низовых.
Просматривая видео с бьющимися и сдуваемыми квадрокоптерами, я заметил однажды простую рекомендацию: калибруйте компас перед полётом
— это позволит Фантому без проблем вернуться к месту взлёта. Действительно, возврат «домой» является чуть ли не самой важной функцией летательного аппарата. Потому что при подъёме на 150 метров над землёй даже в чистом дневном небе его уже непросто разглядеть. А если не знать примерный сектор телесного угла, то и просто не разглядеть. Если же дрон взлетает на 250 метров и по горизонтали удаляется на 500, то визуально его контролировать нет никакой возможности. В незнакомом однообразном ландшафте по видео с его камеры тоже не сориентируешься. Подозреваю, на заре коптеростроения не один аппарат потерялся в небе таким образом. А нам повезло. Умные китайцы встроили такой функционал, что квадрокоптер возвращается домой не только тогда, когда его просят, но и в том случае, если теряет сигнал с пульта. Кстати, в городе потеря сигнала происходит регулярно.
Но вернёмся к калибровке. Вышли мы однажды во двор собственного жилищного комплекса и откалибровали компас. Таблица состояния квадрокоптера исчезла с экрана планшета, запустились двигатели, и коптер взмыл в небо. Сантиметров на шестьдесят где-то… Сразу после взлёта его повело куда-то вбок, в дерево. Оператор сумел корректно отреагировать и увести машинку от столкновения. Но сумасшедший дрон продолжил хулиганство: сначала чуть не повыкосил оператора вместе со зрителями, а затем благополучно врезался таки в другое дерево и упал вверх ногами на траву. Снова нужно отдать должное китайцам: винты не сломались, и вообще, всё осталось в целости, если не считать пары царапин на борту.
Ошибка заключалась в том, что инструкции нужно читать ещё внимательнее. При калибровке компаса коптер следует держать не ниже метра над землёй, тогда как я его обычно поворачивал, едва приподняв. Но узнал я о правильном методе позже. А тогда подумал, что где-нибудь под землёй залегает магнитная аномалия. Там, вообще говоря, парковка, так что, в принципе, электромагнитных помех может быть немало. Мы просто отошли в другое место и, едва сдерживая дрожь в коленках, снова запустили зверя. На этот раз успешно.
Но не совсем обычно. С руки. На мой взгляд, полезно знать, что DJI Phantom 3 без проблем запускается, если держать его одной рукой за ногу. Может пригодиться при запуске на каком-нибудь поле с высокой травой. В конце видео под этой статьёй показано, как осуществлять таким образом приземление, то есть приручение. Ну и просто полезно знать тяжесть и силу квадрокоптера на всякий случай. При первом запуске с руки я просто поддал газу, чтобы вывесить дрона в воздухе и, не разжимая полностью пальцев, убедился, что его никуда не сносит.
Кроме того, после первого удара о дерево мы немедленно приобрели защитные рамки для пропеллеров. Они, конечно, делают конструкцию громоздкой и непригодной к быстрой разборке, но так спокойнее. Между прочим, на том же Ютюбе есть такие видео, где квадрокоптеры внезапно устремляются в стену или в людей без всякой видимой причины. С нами такого не случалось, но во время съёмок около высоких зданий аппарат действительно иногда непредсказуемо болтает. Трындит, как прожжённая торговка… Подозреваю, дело тут в сложных воздушных завихрениях, которые локально могут быть очень стремительны (яркий пример — торнадо). Так что пусть лучше он будет в защите.
Таким образом, перед каждым запуском мы калибруем компас. К сожалению, я так пока и не понял, как в приложении DJI Go отображается состояние неудачной калибровки. В любом случае, сначала взлетаю сантиметров на тридцать над поверхностью, проверяю управляемость и только потом отправляю гаджет в дальний полёт. Теперь, по крайней мере, я могу его запросто поймать и удержать в ситуации сноса.
В процессе изучения лётных характеристик дрона, у нас родилась идея снять небольшой фильм о жизни этих летательных аппаратов. Сказка, конечно, ложь, но получилось забавно. (Смотреть со звуком.)
Обн.
Образовалось много интересных комментариев, за которые я очень благодарен. Конечно, статья и не претендовала на истину в последней инстанции, но лично на мой вкус ценности своей из-за критики не потеряла. Насчёт калибровки компаса и, вообще, аккуратного взлёта есть
Калибровка регуляторов квадрокоптера – обязательная процедура, которую рекомендуется производить перед профессиональным использованием аппарата. Она заключается в тонкой настройке датчиков и работы электроники управления. Если
калибровка выполнена правильно, то квадрокоптер становится максимально устойчивым в воздухе и может свободно зависать над одной точкой. С одной стороны это упрощает управление аппаратом, с другой – позволяет снимать объекты со статичной камеры, получать фотографии и видеоизображения максимально хорошего качества.
Профессиональная калибровка квадрокоптера
Наша компания предлагает услугу по настройке многовинтовых летательных аппаратов любого назначения. В зависимости от сферы использования, наши специалисты выполнят настройку
квадрокоптера таким образом, чтобы он был максимально отзывчивым и удобным для решения поставленных задач. Обычно услуга включает:
- Настройку электроники и аппаратуры управления;
- Настройку компаса, акселерометра и других датчиков;
- Настройку
регуляторов скорости двигателей;
- Регулировку отзывчивости джойстиков (пульта управления);
- Прошивку или перепрошивку аппарата (в случае необходимости).
Правильно выполненная настройка
квадрокоптера делает его максимально управляемым в любом режиме полета.
Когда необходима регулировка коптера
Существует ошибочное мнение, что правильно настроенный аппарат не нуждается больше в регулировке. А также, что каждый новый квадрокоптер – настроен правильно. Оба этих утверждения в корне не верны. Конечно, проводить настройку
регуляторов летательного аппарата перед каждым полетом вовсе не обязательно. Но сделать ее необходимо в следующих случаях:
- При покупке нового квадрокоптера – перед его использованием;
- При изменении конфигурации аппарата, замене или установке новых элементов;
- При перемещении GPS-модуля;
- Если у
квадрокоптера нарушена
стабилизация; - После падения или ремонта.
Нужна ли
прошивка квадрокоптера
Обычно
прошивка аппарата выполняется в тех случаях, когда сделать его качественную калибровку обычным образом не удается. Также мы рекомендуем ее проводить при появлении новых версий прошивок от производителя, так как в них обычно исправлены недочеты и ошибки, допущенные ранее. Ваш квадрокоптер при этом станет функциональнее и проще в управлении.
Как настроить и откалибровать квадрокоптер
Квадракоптер давно превратился в весьма популярный летательный аппарат, в основе которого лежит принцип работы простой механики. Полет полностью координируется замедлением или наоборот ускорением пропеллеров. Согласно общепризнанным законам аэродинамики квадракоптер не сможет самостоятельно стабилизировать свое положение в воздухе. Для этого в его конструкции предусмотрено наличие бортового компьютера. Этот продуманный контроллер позволяет конструкции занимать определенное положение в пространстве, основываясь на информации, которую обеспечивают акселерометры и MEM-гироскопы.
Почему Вашему квадракоптеру нужна качественная настройка?
Обычно после покупки квадракоптера большинство счастливых обладателей делают ошибочный вывод о том, что управлять им будет чрезвычайно легко. И с первых минут начинают испытывать его на прочность, следя за креном и без понимания замедляя моторы. Они забывают выполнить процесс триммирования, который еще называют калибровкой.
Конечно, большинство купленных моделей продаются в состоянии Ready to Fly, но в процессе перевозки или после первого запуска настройки могут с легкостью сбиться. Результат легко увидеть воочию — квадракоптер будет иметь крен на одну из сторон и точно не полетит в указанное владельцем место. Пока дилетанты начнут сетовать на производителя и низкое качество квадракоптера, на самом деле нужно провести калибровку устройства.
Без качественно проведенной калибровки квадракоптер будет абсолютно неуправляемым и Вы получите больше шансов на то, чтобы уничтожить его. Никакого удовольствия от полета не ждите!
С чего начать?
На первом этапе нужно исследовать функционал пульта управления. Обычно все производители помещают в левый сток функцию вертикального передвижения, а в правом — боковые крены и наклон вперед. Не следует забывать, что триммирование обязательно проводят в тот момент, когда квадракоптер оторвался от земли и завис в воздухе. Оптимальная высота для настройки устройства — 1-2 метра. Слишком большая высота не позволит откалибровать его без кренов.
Как понять, с каким джойстиком проблема? Правый или левый?
1. Видите ярко выраженный крен квадракоптера на одну из сторон? Нужно позаботиться о правом джойстике, проведя регулировку по крену.
2. Квадракоптер со всей силы летит вперед или наклонился назад? Калибровка по тангажу нужна левому джойстику.
3. Видите и крен, и наклон вперед за несколько секунд? Настройка нужна обоим джойстикам.
Начинаем настройку квадракоптера!
На первом этапе включаем пульт дистанционного управления и само устройство. Второй шаг — поднимаем конструкцию на высоту от 1 до 2 метров. Часто уже в первые секунды Вы увидите, насколько сильно устройство кренится на одну из сторон и хочет ли оно лететь вперед. Как только для зависания дрона в одном положении нужны дополнительные усилия — нужна калибровка.
Механическая или автоматическая калибровка? Делаем выбор!
Механическая настройка выполняется только тогда, когда отклонения практически незаметны, но могут быть ощутимы на большой высоте. Как только надо смещать триммер больше, чем на 5-6 позиций, владельцам дрона советуют провести настройку с пульта управления.
Механическая калибровка заключается в подкручивании регулятора тяги между так называемым сервоприводом дрона и тарелкой конструкции. Автоматический метод предполагает использование специальных переключателей.
Квадракоптер летит вперед? Триммер тангажа
должен быть в нижнем положении. Если имеете дело с наклонении коптера
назад, триммер ставят в верхнее положение и пытаются выровнять конструкцию, которая зависла в воздухе прямо перед Вами.
Квадракоптер периодически уносит влево? Триммер должен задержаться в правом положении. Уносит в правую сторону? Триммер — в левую.
Всегда стоит получить консультации у специалистов, если Вы понятия не имеете, как правильно осуществить калибровку квадракоптера, поскольку дорогая вещь может просто упасть с большой высоты или же столкнуться с фасадом дома или столбом. Неуправляемый квадракоптер — это настоящая проблема. Решите ее задолго до появления с помощью своевременной настройки выбранного Вами дрона.
Подавляющее большинство (до 90%) квадрокоптеров продаются уже в готовом к полету состоянии (подтверждением становится специальная маркировка Ready to Fly). Одновременно перед первым запуском владельцу при необходимости нужно провести калибровку. Для этого поднимите ваш квадрокоптер попробуйте двигать в разные стороны. Если траектория движения будет меняться хаотично, то это признак необходимости калибровки. Аналогичные проверки стоит делать периодически и в будущем (особенно это касается ударов дрона о разные поверхности), что может сбить настройку и точность движения. Контролировать четкость реакции на ваши действия необходимо на высоте чуть выше полуметра. Сильно поднимать рискованно из-за повреждений при падении, а на высоте до 50 сантиметров пропеллеры квадрокоптера будут создавать воздушную подушку, которая удержит дрон и не позволит четко проконтролировать его действия в вертикальной плоскости.
Обратим внимание, что проверку необходимо производить в большом закрытом помещении (подойдет спортивный зал или склад), либо на поляне, в поле при условии отсутствия ветра, который может внести свои коррективы и сносить дрон в одну из сторон.
Подготовка коптера к первому взлету
Перед первым запуском проверьте включен ли дрон, проконтролировав положение соответствующего переключателя на его корпусе. Затем установите его на горизонтальную поверхности и разово на короткий промежуток времени поднимите левый джойстик вверх (если требование горизонтальности не будет соблюдено, то могут быть сбиты все настройки). Если все в порядке и можно взлетать, то вы услышите короткий однотонный звук.
В случае, когда после активации на пульте управления начал быстро мигать светодиодный индикатора, а на квадрокоптере он мигает очень медленно, то это признак рассинхронизации.
Восстановить нормальную связь поможет выключение и повторное включение дрона.
Калибровка квадртокоптера. Основные моменты
Существует два варианта действий:
- механическая (применяется при небольшом отклонении в полете, представляя собой обычное подкручивание регулятора, отвечающего за тягу в одну или другую сторону, который расположен между сервоприводом и тарелкой);
- автоматическая (предполагает настройку работы напрямую с пульта управления и проводится при необходимости сместить триммер на 5+ позиций).
Сама калибровка проводится следующим образом:
- включаем квадрокоптер, переведя задвижку в положение On;
- включаем пульт и тянем левый стик до упора вниз;
- набираем высоту в 0,5 метра и наблюдаем в какую из сторон «тянет» коптер.


Если появились проблемы, то сбрасываем до нуля настройки. Для этого поставьте дрон на ровную горизонтальную площадку, включите его и потяните одновременно левый джойстик вниз, а правый налево. Сделайте паузу, необходимую для настройки гироскопа, а затем одновременно левый стик отведите вниз, а правый направо. дождавшись калибровки акселерометра. Обратим внимание, что калибровка невозможна на наклонной поверхности из-за неизбежных ошибок и необходимости повторно калибровать.
Теперь попробуйте вновь запустить дрон и поднять его на высоту не меньше полуметра (ниже нет смысла, так как коптер будет удерживаться воздушной подушкой, образующейся при вращении винтов). Если проблема не исчезла, то требуется триммирование.
Триммирование квадрокоптера
Достаточно простой процесс, позволяющий точно откалибровать движения дрона и обеспечить хорошую управляемость в полете. При выполнении процесса обращайте внимание на следующие правила:
- если квадрокоптер клонит влево, то триммировать по рудеру его нужно в правую сторону и наоборот;
- если при полете дрон кивает носом вперед, то триммируем назад и обратно.
Для оценки направления, требующего настройки, достаточно сделать разворот квадрокоптера на 360 градусов по любому из основных направлений. Для этого достаточно потянут правый стик в одну из сторон и нажать верхнюю кнопку.

Перед тем как начать триммирование квадрокоптера нужно помнить, что у современных дронов имеется два режима работы (высокий и низкий расходы энергии), поэтому важно оценить качество его работы в каждом из них по отдельности. Также обратите внимание на правильность сборки самого коптера, так как иногда пропеллеры не крутятся даже при полностью исправных моторах.
Как калибровать квадрокоптер Syma
Принципиально триммирование и настройка подобных дронов не отличается от описанной выше процедуры. Ее можно легко провести собственными силами с помощью инструкции, прилагаемой к коптеру. Также обратим внимание, что модели Syma оснащены устройством, контролирующим уровень заряда аккумулятора. При приближении последнего к критическому уровню дрон самостоятельно снижается до безопасной высоты, что предупредит его повреждение при полной разрядке и падении на землю. Про этот момент нужно обязательно помнить и если не удается произвести настройку квадрокоптера, то обратите внимание на уровень заряда.

Сам процесс калибровки и триммирования не отличается от моделей других производителей. Для начала нужно запустить дрон на высоту чуть выше полуметра и понаблюдать за ним. Если происходит самопроизвольное смещение, то нужно подкорректировать, учитывая следующие моменты:
- при вращении влево триммер под левым джойстиком управления нужно медленно сдвигать вправо до момента прекращения подобного движения и на оборот;
- при движении аппарата вперед или назад нужно передвигать триммер под правым джойстиком также в противоположном направлении.
Обратите внимание, что передвигать триммер нужно очень медленно из-за риска перестараться и необходимости откалибровать его уже в обратном направлении.
Почему квадрокоптер тянет в сторону?
Самой распространенной проблемой с дронами остается их нестабильное положение и «увод» в сторону в условиях безветренной погоды. В большинстве случаев проблема решает калибровка и триммирование. Если это не помогает, то проблема может быть более серьезной и нужно проверить следующие моменты:
- правильность подключения;
- корректность направления вращения пропеллеров;
- наличие неисправностей в приводах пропеллеров;
- целостность отдельных элементов, ведущих к разбалансировке коптера.
Достаточно часто причиной проблем становится попытка самостоятельного или неквалифицированного ремонта, что нужно учитывать при техническом обслуживании. Если вы решите калибровать или ремонтировать дрон самостоятельно, то действуйте внимательно и соблюдайте требования инструкций.
На чтение 10 мин. Просмотров 854 Опубликовано 04.01.2023
Содержание
- Что делать и как исправить, если квадрокоптер при взлете тянет в сторону
- Почему квадрокоптер тянет в сторону
- Esc – электронные регуляторы скорости (оборотов)
- Как летает квадрокоптер
- Как провести триммирование для квадрокоптера
- Как работает квадрокоптер
- Направление двигателя для рыскания
- Направление пропеллеров – рыскание, тангаж, крен
- Направление пропеллеров для вертикального подъем
- Направление пропеллеров и двигателей квадрокоптера
- Направление пропеллеров квадрокоптера для тангажа и крена
- Центральный полетный контроллер
- Заключение
Что делать и как исправить, если квадрокоптер при взлете тянет в сторону
Если при испытании выяснилось, что дрон тянет в сторону, и летит он неровно, необходимо посадить устройство на землю и провести внимательный физический осмотр. Пошаговый алгоритм предлагается следующий:
- Винты квадрокоптера аккуратно прокручивают пальцами. Если один из пропеллеров вращается медленнее других и с ощутимым усилием, необходимо снять его и посмотреть, нет ли загрязнений на оси двигателя.
- Любой налипший мусор, травинки, шерсть и нитки, из-за которых квадрокоптер тянет в сторону, нужно снять. После этого винт устанавливают обратно, при необходимости заворачивая менее плотно, и еще раз прокручивают пальцами. Если он идет свободно, то, скорее всего, коптер в полете перестанет тянуть в сторону.
- Дрон ставят на ровной поверхности и снова пробуют запустить в воздух. Для старых квадрокоптеров механической чистки обычно оказывается достаточно.
Совет! Если винты дрона недавно приходилось менять, следует еще раз проверить направление вращения купленных пропеллеров и при необходимости переустановить их повторно.
Почему квадрокоптер тянет в сторону
Ситуация, в которой квадрокоптер кренит набок или не взлетает, очень распространенная проблема. Вызывают неполадку несколько причин:
- Неправильные настройки. Перед отправкой в магазины дроны подготавливают для полета, но в процессе многочисленных транспортировок калибровка может сбиться.
- Слишком туго насажен один из винтов. Если при сборке допущена ошибка, и какой-то пропеллер вращается с большим усилием, нежели остальные, квадрокоптер будет тянуть в сторону.
- На ось двигателя в месте крепления винта намотались нитки, травинки или волосы. Такое часто случается со старыми дронами — сам пропеллер в порядке, но лишние элементы тормозят его вращение.
Еще одна причина, по которой квадрокоптер может тянуть в сторону, это ошибка при самостоятельной замене винта. Хрупкие пропеллеры часто ломаются, для устранения поломки необязательно обращаться к профессионалам — детали стоят дешево и не являются дефицитом.
Esc – электронные регуляторы скорости (оборотов)

Электронный регулятор скорости (ESC) — это электронная схема, установленная на каждом двигателе и предназначенная для изменения оборотов электродвигателя, его направления, а также торможения.
Электронные регуляторы скорости являются важным компонентом современных квадрокоптеров. Они предоставляют высокую мощность, высокую частоту и 3-фазный переменный ток для двигателей. Одновременно с этим, ESC очень маленькие и компактные. Квадрокоптеры и дроны полностью зависят от переменной скорости двигателей, приводящих в движение пропеллеры.
Как летает квадрокоптер
Изменения на пульте дистанционного управления, посылают сигналы на центральный полетный полета. Центральный контроллер полета передает эту информацию в электронные регуляторы скорости (ESC) каждого двигателя, которые, направляют каждый двигатель на увеличение или уменьшение скорости.
Движение ручки дистанционного управления → Центральный контроллер полета → Электронные схемы управления скоростью (ESC) → Двигатели и пропеллеры → Движение квадрокоптера или зависание.
Как провести триммирование для квадрокоптера
Если квадрокоптер летит в бок, делать нужно в первую очередь проверку его механической исправности. Но когда отладка винтов не дает результатов, и дрон продолжает тянуть в сторону, остается провести автоматическую калибровку устройства. Выполняют ее по такой схеме:
- На пульте управления коптером находят кнопки или колесики, отвечающие за триммирование.
- Дрон запускают в работу и поднимают устройство в воздух отведением левого стика вниз.
- Набирают небольшую высоту и определяют, в какую именно сторону продолжает тянуть неисправный коптер.
- При наличии крена вправо триммируют дрон влево и наоборот.
- Проводят настройку до тех пор, пока устройство не начнет двигаться совершенно ровно.
Если новый квадрокоптер заваливается в сторону при взлете, для начала можно попробовать просто сбросить заводские установки и провести калибровку гироскопа и акселерометра. Для этого аппарат размещают на ровной поверхности, включают и отводят оба стика сначала вниз и влево, а затем вниз и вправо. Об успешно выполненной настройке коптер сообщит светодиодным или звуковым сигналом.
Как работает квадрокоптер
Как квадрокоптер зависает или летит в любом направлении, поднимается или опускается в одно мгновение, от прикосновений к ручке пульта дистанционного управления. Дроны способны летать автономно через запрограммированное программное обеспечение для навигации по маршрутным точкам и летать в любом направлении от точки к точке. Давайте рассмотрим используемые технологии в мультикоптерах в подробностях.
Направление вращения пропеллеров наряду со скоростью двигателя дрона, что делает возможным его полет и маневренность. Пульт радиоуправления квадрокоптером отправляет информацию контроллеру на беспилотнике, и передает данные двигателям через их электронные схемы управления скоростью (ESC) о тяге, оборотах, и направлении.
Несмотря на то, что современные технологии беспилотных летательных аппаратов и квадрокоптеров являются современными, они все еще используют старые принципы парного полета, гравитации, действия и реакции.
При изготовлении квадрокоптеров, винтов и конструкции двигателя учитываются основные 4 силы, влияющие на весь полет: вес, подъем, тяга и также являются важными факторами. Математика используется для расчета тяги двигателя квадрокоптера, в то время как аэродинамика самолета используется для расчета винта и движения воздуха над, под и вокруг квадрокоптера.
Направление двигателя для рыскания
На квадрокоптере, таком как DJI Mavic Pro или последняя версия Mavic 2 Pro, рыскание управляется правой ручкой управления на пульте дистанционного радиоуправления. Перемещение джойстика влево или вправо приведет к повороту квадрокоптера влево или вправо.
Движение на пульте передают сигналы на полетный контроллер, который отправляет данные на регуляторы скорости квадрокоптера, управляющие конфигурацией и скоростью каждого двигателя.
Чтобы увидеть, как это на самом деле работает, взгляните на диаграмму конфигурации пропеллеров выше. На схеме изображен квадрокоптер DJI Phantom 3, вид сверху с роторами, обозначенными от 1 до 4.На приведенной схеме, вы можете видеть конфигурацию двигателя квадрокоптера:
Угловой момент является вращательным эквивалентом линейного импульса и рассчитывается путем умножения угловой скорости на момент инерции. Какой момент инерции? Это похоже на массу, но только он имеет дело с вращением. Угловой момент зависит от того, как быстро вращаются роторы.
Концептуально момент инерции можно рассматривать как представление сопротивления объекта изменению угловой скорости.
Если на двигателях квадрокоптера крутящий момент отсутствует, то общий угловой момент должен оставаться постоянным, равным нулю. Чтобы понять угловое движение вышеуказанного квадрокоптера, представьте, что 2-й и 4-й ротор, имеют положительный угловой момент, а 1-й и 3-й имеют отрицательный угловой момент. Назначим каждому двигателю значение -4, 4, -4, 4, что в сумме равно нулю.
Чтобы повернуть дрон вправо, нужно уменьшить угловую скорость двигателя 1, чтобы иметь угловой момент -2 вместо -4. Если бы ничего не случилось, общий момент импульса квадрокоптера теперь был бы 2. Так вот, этого не может быть. Дрон теперь будет вращаться по часовой стрелке, так что его корпус имеет момент импульса -2.
Уменьшение вращения ротора 1 действительно привело к вращению дрона, но также вызывает проблему. Это также уменьшило тягу от двигателя 1. Теперь направленная вверх сила не равна силе гравитации, и квадрокоптер опускается.
Кроме того, тяга двигателя квадрокоптера не одинакова, поэтому квадрокоптер становится неуравновешенным. Квадрокоптер наклонится вниз в направлении двигателя 1.
Чтобы вращать дрон без создания вышеуказанных дисбалансов, необходимо уменьшить вращение двигателей 1 и 3 с увеличением вращения вращающихся роторов 2 и 4.
Угловой момент вращения роторов по-прежнему не равен нулю, поэтому корпус дрона должен вращаться. Однако общая сила остается равной силе гравитации, и дрон продолжает зависать. Поскольку нижние упорные роторы расположены по диагонали друг от друга, дрон может оставаться в равновесии.
Направление пропеллеров – рыскание, тангаж, крен

Прежде чем углубиться в настройку двигателя и пропеллеров квадрокоптера, давайте немного объясним терминологию, используемую, когда он летит вперед, назад, вбок или вращается при зависании.
Рыскание (Yaw)— это вращение или поворот квадрокоптера вправо или влево. Это основное движение для вращения мультикоптера. На большинстве дронов это достигается с помощью левой ручки газа влево или вправо.
Тангаж (Pitch)— это движение квадрокоптера вперед или назад. Подача вперед обычно достигается нажатием ручки газа вперед, что заставляет квадрокоптер наклоняться и двигаться вперед от вас. Шаг назад достигается перемещением ручки газа назад.
Крен (Roll)- Большинство людей путают крен с рысканием. Крен заставляет квадрокоптер лететь вбок, влево или вправо. Он управляется правой ручкой газа, заставляя его летать слева направо.
Большинство высокотехнологичных дронов, таких как квадрокоптер Yuneec Q500 4k, позволяют управлять им двумя различными способами. Вы можете летать на дроне, как будто вы пилот и на самом деле в квадрокоптере. Вы управляете ручками по-разному относительно крена, в зависимости от того, приближается ли дрон к вам или улетает от вас.
Вот короткое видео, которое очень просто показывает вам, каковы движения крена, тангажа и рыскания.
Направление пропеллеров для вертикального подъем
Вертикальный подъем зависит от направления вращения пропеллеров. Для того чтобы дрон поднялся в воздух, необходимо создать подъемную силу, равной силе гравитации или превышающей ее. Это основная идея взлета самолетов, которая сводится к контролю восходящей и нисходящей силы.
Квадрокоптеры используют конструкцию двигателя и направление вращения винта для создания требуемой тяги, чтобы управлять силой тяжести, воздействующей на летательный аппарат.
Вращение винтов приводит к вытеснению воздуха. Все силы приходят парами (Третий Закон Ньютона), что означает, для каждой силы действия существует равная (по размеру) и противоположная (по направлению) сила противодействия. Поэтому, когда ротор толкает воздух вниз, воздух толкает ротор вверх. Чем быстрее вращаются роторы, тем больше подъемная сила и наоборот.
Дрон может делать три вещи в вертикальной плоскости: зависать, подниматься или опускаться.
Зависание на месте – для зависания, тяга четырех роторов толкает дрон вверх и должна быть точно равна силе гравитации, притягивающей его вниз.
Подъем вверх – достигается путем увеличения тяги (скорости) четырех роторов квадрокоптера так, чтобы сила, направленная вверх, была больше веса и силы тяжести.
Вертикальный спуск или падение вниз – требует выполнения полной противоположности подъему. Уменьшается тяга, чтобы сила была направлена вниз.
Направление пропеллеров и двигателей квадрокоптера

Направление пропеллеров квадрокоптера для тангажа и крена
Поскольку большинство квадрокоптеров симметричны (например, DJI Phantom 4 Pro v2, Autel X-Star и Holy Stone HS 100 Drone), нет никакой разницы между движением вперед или назад. То же самое относится и к движению из стороны в сторону. Как лететь вперед также объясняет, как летать назад или вбок.
Чтобы лететь вперед, необходимо увеличить число оборотов двигателя квадрокоптера (скорость вращения) роторов 3 и 4 (задние двигатели) и уменьшить частоту вращения роторов 1 и 2 (передние двигатели). Общая сила тяги останется равной весу, поэтому дрон останется на том же вертикальном уровне.
Кроме того, поскольку один из задних роторов вращается против часовой стрелки, а другой по часовой стрелке, увеличенное вращение этих двигателей будет по-прежнему создавать нулевой угловой момент. То же самое относится и к передним роторам, поэтому дрон не вращается.
Большая сила в задней части дрона означает, что он наклонится вперед. Теперь небольшое увеличение тяги для всех роторов приведет к созданию силы тяги, которая уравновешивает вес вместе с движением вперед.
Центральный полетный контроллер

Теперь центральный полетный контроллер также получает информацию от IMU, гироскопа, модулей GPS и датчиков обнаружения препятствий, если они установлены на квадрокоптере. Он выполняет вычислительные расчеты с использованием запрограммированных параметров полета и алгоритмов, а затем отправляет эти данные в электронные контроллеры скорости.
Фактически, большинство полетных контроллеров включают в себя IMU, GPS, гироскоп и множество других функций для контроля полета и стабильности квадрокоптера. Довольно часто они имеют второй резервный инерциальный измерительный модуль и другие функций безопасности, такие как возврат на точку взлета.
Примером полетного контроллера послужит новый DJI N3 Flight Controller. Он имеет множество функций и может работать с различными двигателями.
Заключение
Неполадка, когда квадрокоптер тянет в сторону, встречается очень часто, но обычно не свидетельствует о серьезной неисправности. В большинстве случаев крен устраняется калибровкой или механической чисткой аппарата.