
В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Eя = Се * Ф * n (1)
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
U = Eя + Iя * ∑R (2)
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
- обмотки якоря
- добавочных полюсов
- обмотки возбуждения (для двигателей с последовательным возбуждением)
Ток якоря Iя
Выразим из формулы 2 ток якоря.

Частота вращения якоря
Из формул 1 и 2 выведем формулу для частоты вращения якоря.

Электромагнитная мощность двигателя
Pэм = Ея Iя (5)
Электромагнитный момент

где: ω = 2*π*f — угловая скорость вращения якоря, Cм — постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя)

Момент на валу двигателя, т.е. полезный момент, где М0 момент холостого хода;
Р2 — полезная мощность двигателя
- 1. Принцип работы электродвигателей
- 2. Однофазные электродвигатели
- 3. Мощность и вращающий момент электродвигателя
- 4. Защита электродвигателя
Мощность и вращающий момент электродвигателя
Данная глава посвящена вращающему моменту: что это такое, для чего он нужен и др. Мы также разберём типы нагрузок в зависимости от моделей насосов и соответствие между электродвигателем и нагрузкой насоса.
Вы когда-нибудь пробовали провернуть вал пустого насоса руками? Теперь представьте, что вы поворачиваете его, когда насос заполнен водой. Вы почувствуете, что в этом случае, чтобы создать вращающий момент, требуется гораздо большее усилие.

А теперь представьте, что вам надо крутить вал насоса несколько часов подряд. Вы бы устали быстрее, если бы насос был заполнен водой, и почувствовали бы, что потратили намного больше сил за тот же период времени, чем при выполнении тех же манипуляций с пустым насосом. Ваши наблюдения абсолютно верны: требуется большая мощность, которая является мерой работы (потраченной энергии) в единицу времени. Как правило, мощность стандартного электродвигателя выражается в кВт.

Вращающий момент (T) — это произведение силы на плечо силы. В Европе он измеряется в Ньютонах на метр (Нм).

Как видно из формулы, вращающий момент увеличивается, если возрастает сила или плечо силы — или и то и другое. Например, если мы приложим к валу силу в 10 Н, эквивалентную 1 кг, при длине рычага (плече силы) 1 м, в результате, вращающий момент будет 10 Нм. При увеличении силы до 20 Н или 2 кг, вращающий момент будет 20 Нм. Таким же образом, вращающий момент был бы 20 Нм, если бы рычаг увеличился до 2 м, а сила составляла 10 Н. Или при вращающем моменте в 10 Нм с плечом силы 0,5 м сила должна быть 20 Н.

Работа и мощность
Теперь остановимся на таком понятии как «работа», которое в данном контексте имеет особое значение. Работа совершается всякий раз, когда сила — любая сила — вызывает движение. Работа равна силе, умноженной на расстояние. Для линейного движения мощность выражается как работа в определённый момент времени.
Если мы говорим о вращении, мощность выражается как вращающий момент (T), умноженный на частоту вращения (w).
![]()
Частота вращения объекта определяется измерением времени, за которое определённая точка вращающегося объекта совершит полный оборот. Обычно эта величина выражается в оборотах в минуту, т.е. мин-1 или об/мин. Например, если объект совершает 10 полных оборотов в минуту, это означает, что его частота вращения: 10 мин-1 или 10 об/мин.

Итак, частота вращения измеряется в оборотах в минуту, т.е. мин-1.
Приведем единицы измерения к общему виду.

Для наглядности возьмём разные электродвигатели, чтобы более подробно проанализировать соотношение между мощностью, вращающим моментом и частотой вращения. Несмотря на то, что вращающий момент и частота вращения электродвигателей сильно различаются, они могут иметь одинаковую мощность.

Например, предположим, что у нас 2-полюсный электродвигатель (с частотой вращения 3000 мин-1) и 4-полюсной электродвигатель (с частотой вращения 1500 мин-1). Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются.

Таким образом, вращающий момент 4-полюсного электродвигателя в два раза больше вращающего момента двухполюсного электродвигателя с той же мощностью.
Как образуется вращающий момент и частота вращения?
Теперь, после того, как мы изучили основы вращающего момента и скорости вращения, следует остановиться на том, как они создаются.
В электродвигателях переменного тока вращающий момент и частота вращения создаются в результате взаимодействия между ротором и вращающимся магнитным полем. Магнитное поле вокруг обмоток ротора будет стремиться к магнитному полю статора. В реальных рабочих условиях частота вращения ротора всегда отстаёт от магнитного поля. Таким образом, магнитное поле ротора пересекает магнитное поле статора и отстает от него и создаёт вращающий момент. Разницу в частоте вращения ротора и статора, которая измеряется в %, называют скоростью скольжения.

Скольжение является основным параметром электродвигателя, характеризующий его режим работы и нагрузку. Чем больше нагрузка, с которой должен работать электродвигатель, тем больше скольжение.
Помня о том, что было сказано выше, разберём ещё несколько формул. Вращающий момент индукционного электродвигателя зависит от силы магнитных полей ротора и статора, а также от фазового соотношения между этими полями. Это соотношение показано в следующей формуле:
![]()
Сила магнитного поля, в первую очередь, зависит от конструкции статора и материалов, из которых статор изготовлен. Однако напряжение и частота тока также играют важную роль. Отношение вращающих моментов пропорционально квадрату отношения напряжений, т.е. если подаваемое напряжение падает на 2%, вращающий момент, следовательно, уменьшается на 4%.

Потребляемая мощность электродвигателя
Ток ротора индуцируется через источник питания, к которому подсоединён электродвигатель, а магнитное поле частично создаётся напряжением. Входную мощность можно вычислить, если нам известны данные источника питания электродвигателя, т.е. напряжение, коэффициент мощности, потребляемый ток и КПД.

В Европе мощность на валу обычно измеряется в киловаттах. В США мощность на валу измеряется в лошадиных силах (л.с.).
Если вам необходимо перевести лошадиные силы в киловатты, просто умножьте соответствующую величину (в лошадиных силах) на 0,746. Например, 20 л.с. равняется (20 • 0,746) = 14,92 кВт.
И наоборот, киловатты можно перевести в лошадиные силы умножением величины в киловаттах на 1,341. Это значит, что 15 кВт равняется 20,11 л.с.
Момент электродвигателя
Мощность [кВт или л.с.] связывает вращающий момент с частотой вращения, чтобы определить общий объём работы, который должен быть выполнен за определённый промежуток времени.
Рассмотрим взаимодействие между вращающим моментом, мощностью и частотой вращения, а также их связь с электрическим напряжением на примере электродвигателей Grundfos. Электродвигатели имеют одну и ту же номинальную мощность как при 50 Гц, так и при 60 Гц.

Это влечёт за собой резкое снижение вращающего момента при 60 Гц: частота 60 Гц вызывает 20%-ное увеличение числа оборотов, что приводит к 20%-ному уменьшению вращающего момента. Большинство производителей предпочитают указывать мощность электродвигателя при 60 Гц, таким образом, при снижении частоты тока в сети до 50 Гц электродвигатели будут обеспечивать меньшую мощность на валу и вращающий момент. Электродвигатели обеспечивают одинаковую мощность при 50 и 60 Гц.
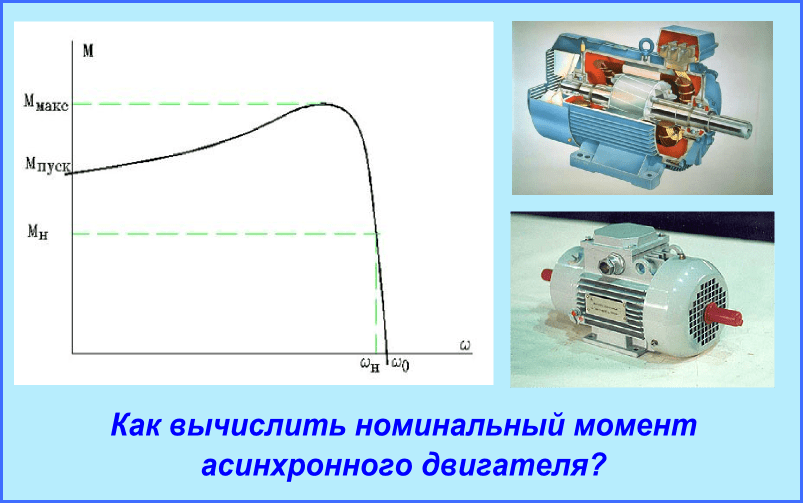
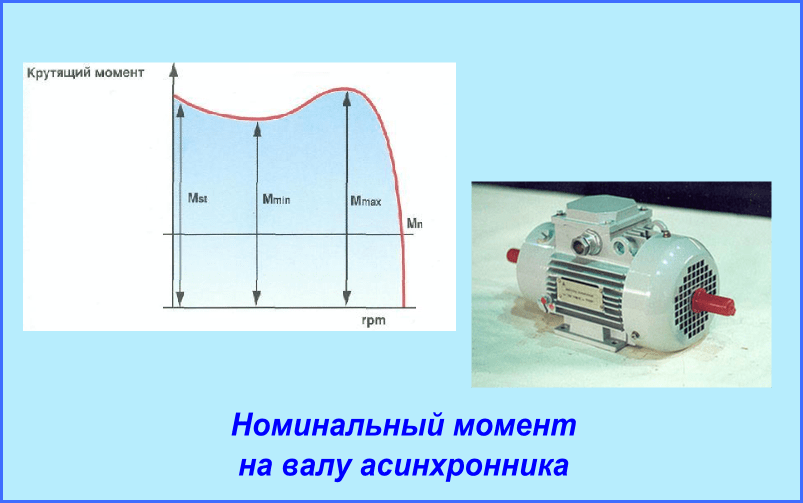
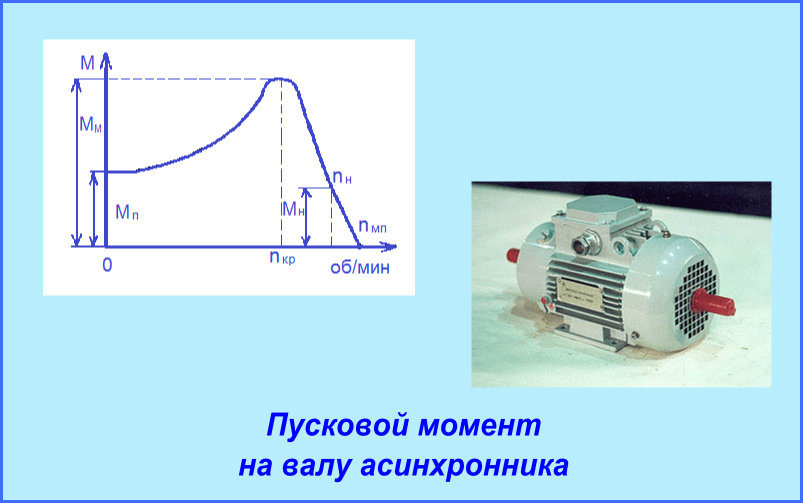
Графическое представление вращающего момента электродвигателя изображено на рисунке.

Иллюстрация представляет типичную характеристику вращающий момент/частота вращения. Ниже приведены термины, используемые для характеристики вращающего момента электродвигателя переменного тока.
Пусковой момент (Мп): Механический вращающий момент, развиваемый электродвигателем на валу при пуске, т.е. когда через электродвигатель пропускается ток при полном напряжении, при этом вал застопорен.
Минимальный пусковой момент (Ммин): Этот термин используется для обозначения самой низкой точки на кривой вращающий момент/частота вращения электродвигателя, нагрузка которого увеличивается до полной скорости вращения. Для большинства электродвигателей Grundfos величина минимального пускового момента отдельно не указывается, так как самая низкая точка находится в точке заторможенного ротора. В результате для большинства электродвигателей Grundfos минимальный пусковой момент такой же, как пусковой момент.
Блокировочный момент (Мблок): Максимальный вращающий момент — момент, который создаёт электродвигатель переменного тока с номинальным напряжением, подаваемым при номинальной частоте, без резких скачков скорости вращения. Его называют предельным перегрузочным моментом или максимальным вращающим моментом.
Вращающий момент при полной нагрузке (Мп.н.): Вращающий момент, необходимый для создания номинальной мощности при полной нагрузке.
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.

Постоянный вращающий момент
Как видно из названия — «постоянный вращающий момент» — подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.

Переменный вращающий момент и мощность
«Переменный вращающий момент» — эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.

Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.

На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.

Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.

В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Соответствие электродвигателя нагрузке
Если нужно определить, отвечает ли вращающий момент определённого электродвигателя требованиям нагрузки, Вы можете сравнить характеристики скорости вращения/вращающего момента электродвигателя с характеристикой скорости вращения/ вращающего момента нагрузки. Вращающий момент, создаваемый электродвигателем, должен превышать потребный для нагрузки вращающий момент, включая периоды ускорения и полной скорости вращения.
Характеристика зависимости вращающего момента от скорости вращения стандартного электродвигателя и центробежного насоса.

Если мы посмотрим на характеристику , то увидим, что при ускорении электродвигателя его пуск производится при токе, соответствующем 550% тока полной нагрузки.

Когда двигатель приближается к своему номинальному значению скорости вращения, ток снижается. Как и следовало ожидать, во время начального периода пуска потери на электродвигателе высоки, поэтому этот период не должен быть продолжительным, чтобы не допустить перегрева.
Очень важно, чтобы максимальная скорость вращения достигалась как можно точнее. Это связано с потребляемой мощностью: например, увеличение скорости вращения на 1% по сравнению со стандартным максимумом приводит к 3%-ному увеличению потребляемой мощности.
Потребляемая мощность пропорциональна диаметру рабочего колеса насоса в четвертой степени.

Уменьшение диаметра рабочего колеса насоса на 10% приводит к уменьшению потребляемой мощности на (1- (0.9 * 0.9 * 0.9 * 0.9)) * 100 = 34%, что равно 66% номинальной мощности. Эта зависимость определяется исключительно на практике, так как зависит от типа насоса, конструкции рабочего колеса и от того, насколько вы уменьшаете диаметр рабочего колеса.
Время пуска электрдвигателя
Если нам необходимо подобрать типоразмер электродвигателя для определённой нагрузки, например для центробежных насосов, основная наша задача состоит в том, чтобы обеспечить соответствующий вращающий момент и мощность в номинальной рабочей точке, потому что пусковой момент для центробежных насосов довольно низкий. Время пуска достаточно ограниченно, так как вращающий момент довольно высокий.

Нередко для сложных систем защиты и контроля электродвигателей требуется некоторое время для их пуска, чтобы они могли замерить пусковой ток электродвигателя. Время пуска электродвигателя и насоса рассчитывается с помощью следующей формулы:

tпуск = время, необходимое электродвигателю насоса, чтобы достичь частоты вращения при полной нагрузке
n = частота вращения электродвигателя при полной нагрузке
Iобщ = инерция, которая требует ускорения, т.е. инерция вала электродвигателя, ротора, вала насоса и рабочих колёс.
Момент инерции для насосов и электродвигателей можно найти в соответствующих технических данных.

Мизб = избыточный момент, ускоряющий вращение. Избыточный момент равен вращающему моменту электродвигателя минус вращающий момент насоса при различных частотах вращения.
Мизб можно рассчитать по следующим формулам:



Как видно из приведённых вычислений, выполненных для данного примера с электродвигателем мощностью 4 кВт насоса CR, время пуска составляет 0,11 секунды.
Число пусков электродвигателя в час
Современные сложные системы управления электродвигателями могут контролировать число пусков в час каждого конкретного насоса и электродвигателя. Необходимость контроля этого параметра состоит в том, что каждый раз, когда осуществляется пуск электродвигателя с последующим ускорением, отмечается высокое потребление пускового тока. Пусковой ток нагревает электродвигатель. Если электродвигатель не остывает, продолжительная нагрузка от пускового тока значительно нагревает обмотки статора электродвигателя, что приводит к выходу из строя электродвигателя или сокращению срока службы изоляции.
Обычно за количество пусков, которое может выполнить электродвигатель в час, отвечает поставщик электродвигателя. Например, Grundfos указывает максимальное число пусков в час в технических данных на насос, так как максимальное количество пусков зависит от момента инерции насоса.
Мощность и КПД (eta) электродвигателя
Существует прямая связь между мощностью, потребляемой электродвигателем от сети, мощностью на валу электродвигателя и гидравлической мощностью, развиваемой насосом.
При производстве насосов используются следующие обозначения этих трёх различных типов мощности.

P1 (кВт) Входная электрическая мощность насосов — это мощность, которую электродвигатель насоса получает от источника электрического питания. Мощность P! равна мощности P2, разделённой на КПД электродвигателя.
P2 (кВт) Мощность на валу электродвигателя — это мощность, которую электродвигатель передает на вал насоса.
Р3 (кВт) Входная мощность насоса = P2, при условии, что соединительная муфта между валами насоса и электродвигателя не рассеивает энергию.
Р4 (кВт) Гидравлическая мощность насоса.
Вращающий момент электродвигателя – это сила вращения его вала. Именно крутящий момент определяет выходную мощность вашего двигателя. Она измеряется в Ньютонах на метр Н*м или килограммах силы на метр кгс*м.
Расчет крутящего момента двигателя

Крутящий момент электродвигателя – это сила вращения его вала. Именно крутящий момент определяет выходную мощность вашего двигателя. Она измеряется в Ньютонах на метр Н*м или килограммах силы на метр кгс*м.
Виды крутящего момента:
- Номинальный – Значение крутящего момента для стандартного режима работы и стандартной номинальной нагрузки двигателя.
- Крутящий момент при запуске – Является табличным значением. Сила вращения, которую способен развить электродвигатель после запуска. При выборе электродвигателя необходимо следить за тем, чтобы это значение было больше статического момента устройства – насоса, вентилятора и т.д. В противном случае двигатель не сможет запуститься, а обмотка может перегреться и сгореть.
- Максимальный – это предел, при котором нагрузка выравнивается и останавливает двигатель.
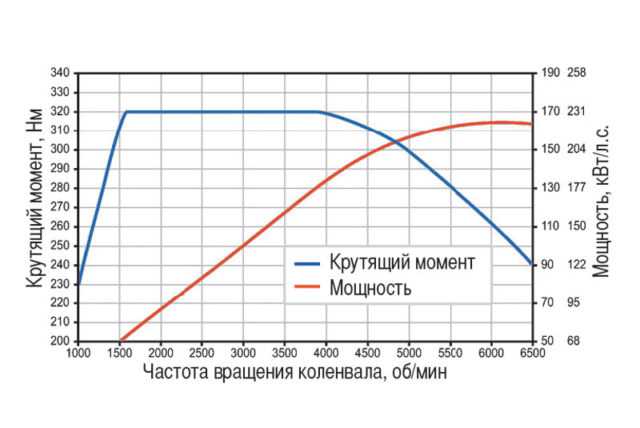
Высокий крутящий момент двигателя обеспечивает автомобилю лучшую динамику разгона даже при низкой частоте вращения коленчатого вала и значительно повышает тяговую способность двигателя и способность к движению по пересеченной местности.
Крутящий момент и мощность
Водители часто спорят между собой о том, какой двигатель мощнее. Но иногда они понятия не имеют, из чего состоит этот параметр. Общепринятый термин “лошадиная сила” был введен изобретателем Джеймсом Уаттом в 18 веке. Он придумал его, наблюдая, как лошадь запрягают для подъема угля из шахты. Он подсчитал, что одна лошадь может поднять 150 кг угля на высоту 30 метров за одну минуту. Одна лошадиная сила эквивалентна 735,5 Вт, поэтому 1 кВт равен 1,36 л.с.
Прежде всего, мощность каждого двигателя указывается в лошадиных силах, и только потом упоминается крутящий момент. Однако эта тяговая характеристика также дает представление о конкретных буксировочных и ходовых возможностях автомобиля. Крутящий момент – это мера производительности двигателя, а мощность – ключевой параметр его работы. Эти показатели тесно связаны между собой. Чем больше лошадиных сил производит двигатель, тем больше потенциал крутящего момента. Этот потенциал реализуется в реальном мире через трансмиссию и оси машины. Сочетание этих элементов вместе определяет, сколько именно мощности может быть преобразовано в крутящий момент.
Самый простой пример – сравнить трактор с гоночным автомобилем. Гоночный автомобиль имеет много лошадиных сил, но ему необходим крутящий момент для увеличения скорости через коробку передач. Такой машине требуется очень мало работы для движения вперед, поскольку большая часть энергии используется для развития скорости.
Что касается трактора, то он может иметь двигатель такого же рабочего объема, который производит такое же количество лошадиных сил. Однако в этом случае мощность используется не для развития скорости, а для создания тяги (см. тяговый класс). Для этого он приводится в движение многоступенчатой трансмиссией. Поэтому трактор не развивает высоких скоростей, но может тянуть большие грузы, пахать и обрабатывать землю и т.д.
В двигателе внутреннего сгорания мощность передается от выхлопных газов к поршню и от поршня к кривошипно-шатунному механизму, а затем к коленчатому валу. А коленчатый вал, через коробку передач и трансмиссию, вращает колеса.
Конечно, крутящий момент двигателя не является постоянным. Она становится сильнее, когда на руку действует большая сила, и слабее, когда сила ослабевает или прекращается. Это означает, что когда водитель нажимает на педаль акселератора, сила, действующая на рычаг, увеличивается, и соответственно увеличивается крутящий момент двигателя.
Эта сила обеспечивает преодоление любых сил, мешающих движению автомобиля. К ним относятся силы трения в двигателе, коробке передач и трансмиссии, аэродинамические силы, силы качения и т.д. Чем больше мощность, тем большую силу сопротивления сможет преодолеть автомобиль и тем больше будет скорость. Однако мощность не является постоянной силой, а зависит от оборотов двигателя. На холостом ходу мощность одинаковая, но на максимальной скорости она совершенно разная. Многие производители автомобилей указывают, при каких оборотах двигателя достигается максимальная мощность.
Водители часто сталкиваются с ситуациями, когда им необходимо значительно ускорить свой автомобиль, чтобы выполнить необходимый маневр. Когда он нажимает акселератор до пола, он чувствует, что автомобиль разгоняется плохо. Быстрый разгон требует большого крутящего момента. Именно это характеризует быстрый разгон автомобиля.
Основная сила в двигателе внутреннего сгорания создается в камере сгорания, где происходит воспламенение топливно-воздушной смеси. Именно это приводит в движение кривошипно-шатунный механизм, а через него – коленчатый вал. Шатун – это длина кривошипа, а значит, если длина больше, то и крутящий момент увеличится.
Однако увеличить шатун до бесконечности невозможно. Если да, то ход поршня придется увеличить, а вместе с ним и размер двигателя. Также необходимо снизить обороты двигателя. Двигатели с большим коленчатым рычагом можно использовать только на больших лодках. Однако в легковых автомобилях небольшие размеры коленчатого вала не позволяют проводить какие-либо эксперименты.
Например, мы часто получаем запросы: “Нам нужно измерить двигатель мощностью 200 л.с.” или “Какой гидравлический тормоз вы бы порекомендовали для 140 кВт?”.
Что это означает на практике?
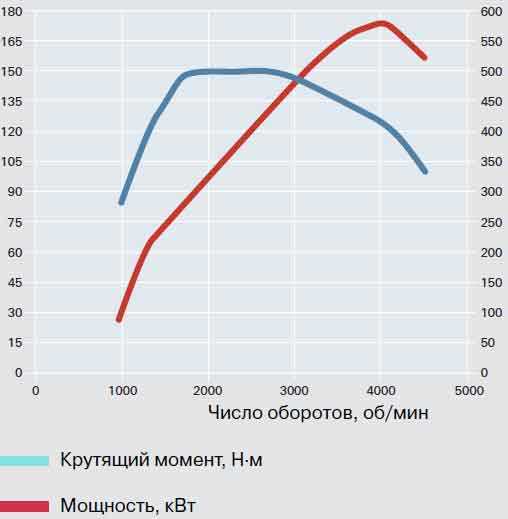
Если отойти от теории, то графики мощности и крутящего момента являются основными характеристиками двигателя. Когда вы ведете автомобиль в гору и пытаетесь сохранить прежнюю скорость, вам приходится сильнее нажимать на акселератор. Многие люди думают, что мощность останется прежней, потому что скорость не изменится. Но это не так!
При движении в гору двигатель получает больше мощности при тех же оборотах.
(В той же передаче). Вы можете легко проверить это, посмотрев на текущий расход топлива.
Это также объясняет, почему двигателю нужна коробка передач, поскольку нам необходимо поддерживать обороты в пределах максимального диапазона мощности двигателя, чтобы эффективно ускоряться и преодолевать подъемы в гору.
С другой стороны, электромобили обходятся без него. Кривая крутящего момента и мощности электродвигателя гораздо более линейна, и электродвигатель производит гораздо больше мощности на низких скоростях.
Обе эти единицы измерения мощности (лошадиные силы и ватты, причем термин киловатт обычно используется для увеличения числовых значений последней единицы) были изобретены Дж. Уаттом, но именно крутящий момент, измеряемый в ньютон-метрах, приводит в движение автомобиль. Почему не мощность двигателя определяет способность автомобиля двигаться?
Крутящий момент, его соотношение с мощностью
Дж. Уатт изобрел обе вышеупомянутые единицы измерения мощности (лошадиные силы и ватты, причем термин киловатт обычно используется для увеличения показателей последнего), но именно крутящий момент, выраженный в ньютон-метрах, приводит автомобиль в движение. Почему не мощность двигателя автомобиля определяет его способность двигаться?
Мощность и крутящий момент тесно связаны: мощность, измеряемая в ваттах, является примером крутящего момента, умноженного на 0,1047 и число оборотов в минуту.
Другими словами, мощность указывает на количество работы, выполненной за определенный период времени. Крутящий момент – это показатель способности двигателя выполнять работу.
Например, если автомобиль застрял в болоте и перестал двигаться, лошадиная сила двигателя равна нулю, потому что работа не выполняется, в то время как крутящий момент присутствует, хотя его величина минимальна, недостаточна для начала движения. Таким образом, крутящий момент возникает без мощности, но не наоборот.
На практике мощность напрямую влияет на скорость автомобиля: чем она выше, тем быстрее автомобиль может ехать. Крутящий момент (также называемый “крутящий момент”) – это мера силы, действующей на коленчатый вал, и его способность сопротивляться вращению. Высокий крутящий момент двигателя наиболее заметен при разгоне или при движении в сложных условиях, когда двигатель подвергается критическим нагрузкам.
Другим важным показателем возможностей двигателя является диапазон скоростей, в котором он достигает наибольшей тяги. Не менее важна гибкость двигателя, т.е. его способность достигать высоких оборотов при большой нагрузке. Это соотношение между количеством оборотов для получения наибольшей мощности и максимально возможного крутящего момента.
Это влияет на управление скоростью с помощью педалей акселератора и тормоза без использования коробки передач, а также на возможность движения на низкой скорости на высших передачах.
Например, благодаря хорошей эластичности двигателя автомобиль разгонится с 75-80 км/ч до 120 км/ч на 5-й передаче, и это произойдет тем быстрее, чем более эластичен силовой агрегат. Если у вас есть выбор между двумя двигателями одинакового рабочего объема и мощности, лучше выбрать более гибкий, так как он экономичнее, работает тише и имеет больший срок службы.
Чтобы решить эту дилемму, необходимо понять несколько фактов:
Мощность или крутящий момент – что важнее?
Чтобы решить эту дилемму, важно понять несколько фактов:
- Мощность линейно связана с частотой вращения коленчатого вала: более высокие обороты равны более высокой производительности;
- Мощность является производной от hp;
- До определенного значения мощность зависит от числа оборотов в минуту: более высокие обороты соответствуют большему километражу. Но после пика она снижается.
Из этого можно сделать вывод, что крутящий момент является приоритетным параметром, характеризующим возможности двигателя. В то же время нельзя пренебрегать мощностью: это означает, что производители автомобилей должны адаптировать характеристики машины таким образом, чтобы поддерживать баланс между этими величинами.
Момент нагрузки – это вращающий момент, создаваемый вращающейся механической системой, соединенной с валом асинхронного двигателя. В качестве синонима в литературе можно встретить термин “момент сопротивления”. Момент нагрузки зависит от геометрических и физических параметров тела в кинематической системе, соединенной с валом двигателя. Как правило, при расчетах предполагается, что момент сопротивления приложен к валу двигателя.
Как определить крутящий момент двигателя
Преобразователи частоты />Теория АЭД />Торки
В этом разделе мы собрали подборку статей о понятии крутящего момента, которое так важно в теории асинхронного привода. Здесь вы найдете материал, раскрывающий значение некоторых терминов, связанных с понятием крутящего момента. Кроме того, мы включили подборку статей с формулами, которые можно использовать для расчета конкретных значений крутящего момента или построения графиков их зависимости. Для наглядности здесь также приведены примеры, иллюстрирующие, как формулы могут быть использованы для расчета того или иного значения.
Пример расчета номинального крутящего момента для асинхронных двигателей
| Асинхронные двигатели – теория – понятие крутящего момента |
| 26.10.2012 22:10 |
|
Из теории мы знаем, что номинальный крутящий момент двигателя – это крутящий момент, развиваемый при номинальной мощности и номинальных оборотах в минуту.
Как мы объясняли ранее, номинальный крутящий момент – это крутящий момент на валу двигателя, значение которого постоянно при постоянной номинальной скорости вращения вала.
Ранее мы подробно рассмотрели, что такое пусковой момент асинхронного электродвигателя и какие формулы используются для расчета пускового момента (новая статья). В этой статье мы приведем пример расчета пускового момента для различных асинхронных двигателей. Для расчета мы будем использовать данные, имеющиеся в техническом паспорте двигателя: номинальный крутящий момент и пусковой момент, умноженный на номинальный крутящий момент. Расчет будет произведен в соответствии с формулой: М старт = Мн*К старт
Прежде чем разрабатывать и анализировать формулы для расчета пускового момента, важно напомнить, что такое пусковой момент. Пусковой момент – это крутящий момент на валу двигателя при определенных условиях. Ключевыми условиями являются нулевая скорость вращения ротора, установившийся ток и номинальное напряжение на обмотках двигателя. Для начала вспомним, что означает термин “критический момент” в теории двигателей. Критический момент – это максимально возможный крутящий момент на валу двигателя при его остановке. В некоторых машинах необходимо обеспечить максимальный пусковой момент на начальном этапе запуска привода. Для этой задачи хорошо подходит двигатель с фазированным асинхронным ротором. Давайте вкратце опишем, что это такое. Асинхронный двигатель с фазным ротором имеет ротор с пазовыми обмотками. Обмотка ротора соединена в звезду. Фазные концы обмотки ротора соединены со специальными контактными кольцами. Кольца вращаются вместе с валом двигателя. Для запуска и регулировки обмотки ротора можно включить реостат. Реостат подключается с помощью щеточного контакта, который скользит по кольцам. Этот реостат является дополнительным активным резистором. Это сопротивление одинаково для каждой фазы обмотки. Важным понятием в области физики твердого тела является крутящий момент. Эта концепция имеет особое значение в области электроприводов. В этой статье мы обсудим основные понятия, связанные с крутящим моментом. Момент нагрузки – это вращающий момент, создаваемый вращающейся механической системой, соединенной с валом асинхронного двигателя. Термин “момент сопротивления” встречается в литературе как синоним. Нагрузочный момент зависит от геометрических и физических параметров тел в кинематической цепи, соединенной с валом двигателя. Как правило, при расчете момента нагрузки на валу двигателя принято использовать момент сопротивления. Тормозной момент – момент, развиваемый асинхронной машиной при торможении. В литературе можно найти синоним тормозного момента. В теории асинхронных двигателей рассматриваются три режима торможения: рекуперативное торможение, динамическое торможение и антиконденсатное торможение.
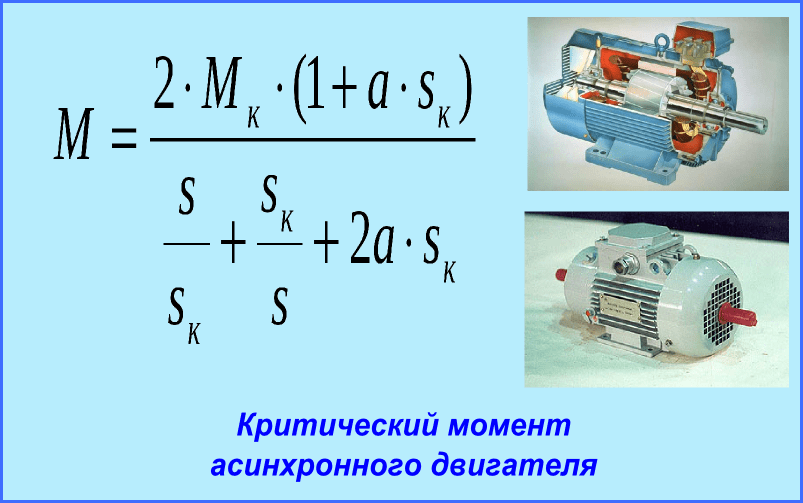
Критический момент для асинхронных двигателей – Максимальное значение крутящего момента, развиваемого двигателем. Крутящий момент достигает этого значения при критическом скольжении. Если момент нагрузки на валу двигателя превышает критический момент, двигатель останавливается.
Номинальный крутящий момент асинхронного двигателя – Крутящий момент, возникающий на валу двигателя при номинальной мощности и номинальной скорости. Номинальные данные относятся к данным, которые определяются при работе двигателя в режиме, для которого он был разработан и изготовлен.
Пусковой момент на валу асинхронного двигателя – это момент, действующий на вал асинхронного двигателя при следующих условиях: скорость вращения ротора равна нулю (ротор неподвижен), ток установившийся, в обмотки двигателя подается ток номинальной частоты и напряжения, а соединение обмоток соответствует номинальному режиму работы двигателя.
Электромагнитный крутящий момент – крутящий момент, приложенный к валу двигателя при протекании тока через обмотки. В литературе можно найти синонимы этого термина: крутящий момент двигателя или крутящий момент мотора. Также часто встречаются варианты с более конкретной формулировкой: электромагнитный момент или электромагнитный момент.
В современной теории асинхронных электрических машин используется множество терминов, связанных с понятием крутящего момента. Некоторые из этих терминов относятся к крутящему моменту, возникающему на валу (роторе) электродвигателя. Другая группа терминов относится к крутящему моменту, создаваемому механической нагрузкой, подключенной к валу электродвигателя. Эти термины определяют как крутящий момент, развиваемый самим двигателем, так и различные состояния крутящего момента на выходном валу двигателя. Под состоянием понимается значение крутящего момента в критических точках. Например, номинальный крутящий момент или пусковой момент. |

- Шаговые двигатели: свойства и практические схемы управления. Часть 2.
- Рабочие характеристики асинхронного двигателя; Школа для электриков: электротехника и электроника.
- Векторное и скалярное управление преобразователями частоты – принцип работы, система управления.
- Асинхронный электродвигатель – конструкция, принцип работы, типы асинхронных двигателей.
- Как найти начало и конец обмотки электродвигателя – ООО «СЗЭМО Электродвигатель».
- Векторное управление вентильным двигателем в безредукторном сервоприводе – темы научных работ по электротехнике, электронике, информатике читайте бесплатно тексты научных работ в электронной библиотеке КиберЛенинка.
- Мягкие пускатели (устройства плавного пуска). Типы и функции.
Составим уравнения
динамики и статики электрического
двигателя постоянного тока, который
приводит в движение рабочий механизм.
Будем считать, что двигатель и рабочий
механизм соединены жесткой кинематической
связью (например, редуктором), и поэтому
они могут рассматриваться как единое
целое. Питание двигателя электрической
энергией осуществляется от источника
с регулируемым напряжением. Этот источник
выполняет функции исполнительного
устройства. В качестве исполнительного
устройства может быть использован
рассмотренный выше генератор постоянного
тока, тиристорный преобразователь,
силовой магнитный усилитель.
Схема замещения
такой электромеханической системы
показана на рис. 4.3.

Рис. 4.3. Схема замещения двигателя
постоянного тока
Основной управляемой
величиной является частота вращения
вала двигателя Д
n,
1/с. Частоту вращения можно регулировать
изменением
э. д. с.
![]() ,
,
создаваемой исполнительным устройствомИУ,
и изменением напряжения возбуждения
![]() .
.
Чаще используется первый способ –
изменение напряжения, приложенного к
якорю двигателя, при постоянном напряжении![]() .
.
Основное возмущающее воздействие
двигателя – момент сопротивления![]() ,
,
возникающий при взаимодействии рабочего
механизмаРМ
с внешней средой. В общем случае этот
момент зависит от частоты вращения.
Зависимость
![]() может иметь довольно сложный характер.
может иметь довольно сложный характер.
Так как в двигателе
происходят и механический, и электрические
переходные процессы, то его состояние
в каждый момент времени описывается
двумя уравнениями равновесия:
уравнением моментов
![]() (4.17)
(4.17)
и уравнением
напряжений в цепи якоря
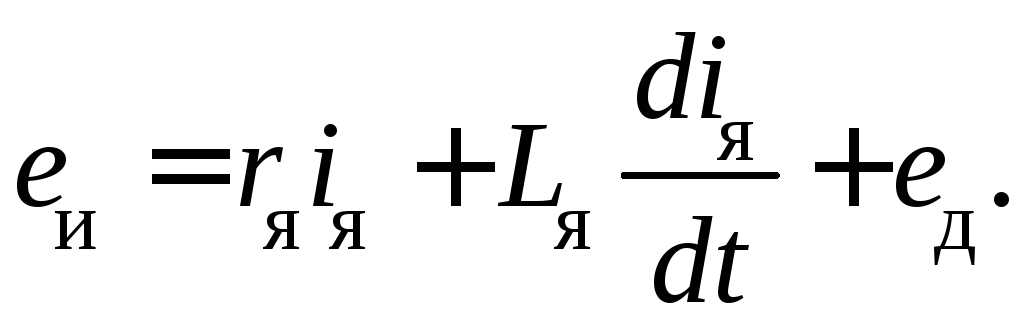 (4.18)
(4.18)
В этих уравнениях
приняты следующие обозначения:
![]() –
–
движущий момент двигателя, Н ∙ м;![]() – сумма момента инерции двигателя
– сумма момента инерции двигателя![]() и приведенного на вал двигателя момента
и приведенного на вал двигателя момента
инерции рабочего механизма![]() ,
,
кг ∙м2;
![]() – суммарное активное сопротивление
– суммарное активное сопротивление
цепи якоря, Ом;![]() –
–
индуктивность цепи якоря, Гн;![]() –
–
ток в цепи якоря, А;![]() – противодействующая э. д. с. двигателя,
– противодействующая э. д. с. двигателя,
В.
Момент
![]() ,
,
создаваемый двигателем, пропорционален
току в цепи якоря и магнитному потоку
возбуждения Ф, Вб:
![]() (4.19)
(4.19)
где
![]() – конструктивная постоянная двигателя,
– конструктивная постоянная двигателя,
Н∙м/А∙Вб [символы![]() ,
,
и![]() имеют такое же значение, как в формуле
имеют такое же значение, как в формуле
(4.5)].
Э. д. с.
![]() ,
,
возникающая в обмотке якоря при вращении,
пропорциональна частоте вращения и
потоку возбуждения:
![]() (4.20)
(4.20)
где
![]() — конструктивная постоянная, В/Вб (1/с).
— конструктивная постоянная, В/Вб (1/с).
Магнитный поток
возбуждения двигателя, так же как у
генератора, является нелинейной функцией
тока возбуждения, которую в практических
расчетах заменяют линейной.
Уравнения (4.17) –
(4.20) совместно описывают двигатель как
единую физическую систему. Они могут
быть представлены в виде алгоритмической
схемы двигателя
(рис. 4.4, а).
В схеме имеется два множительных звена.
Это означает, что при изменяющемся
потоке возбуждения двигатель является
нелинейным объектом.
Если напряжение
возбуждения
![]() не
не
используется в качестве управляющего
воздействия и магнитный поток возбуждения
Ф в процессе управления постоянен
(Ф=Ф0=const),
то алгоритмическая схема (рис. 4.4, а)
может быть упрощена (рис. 4.4, б).
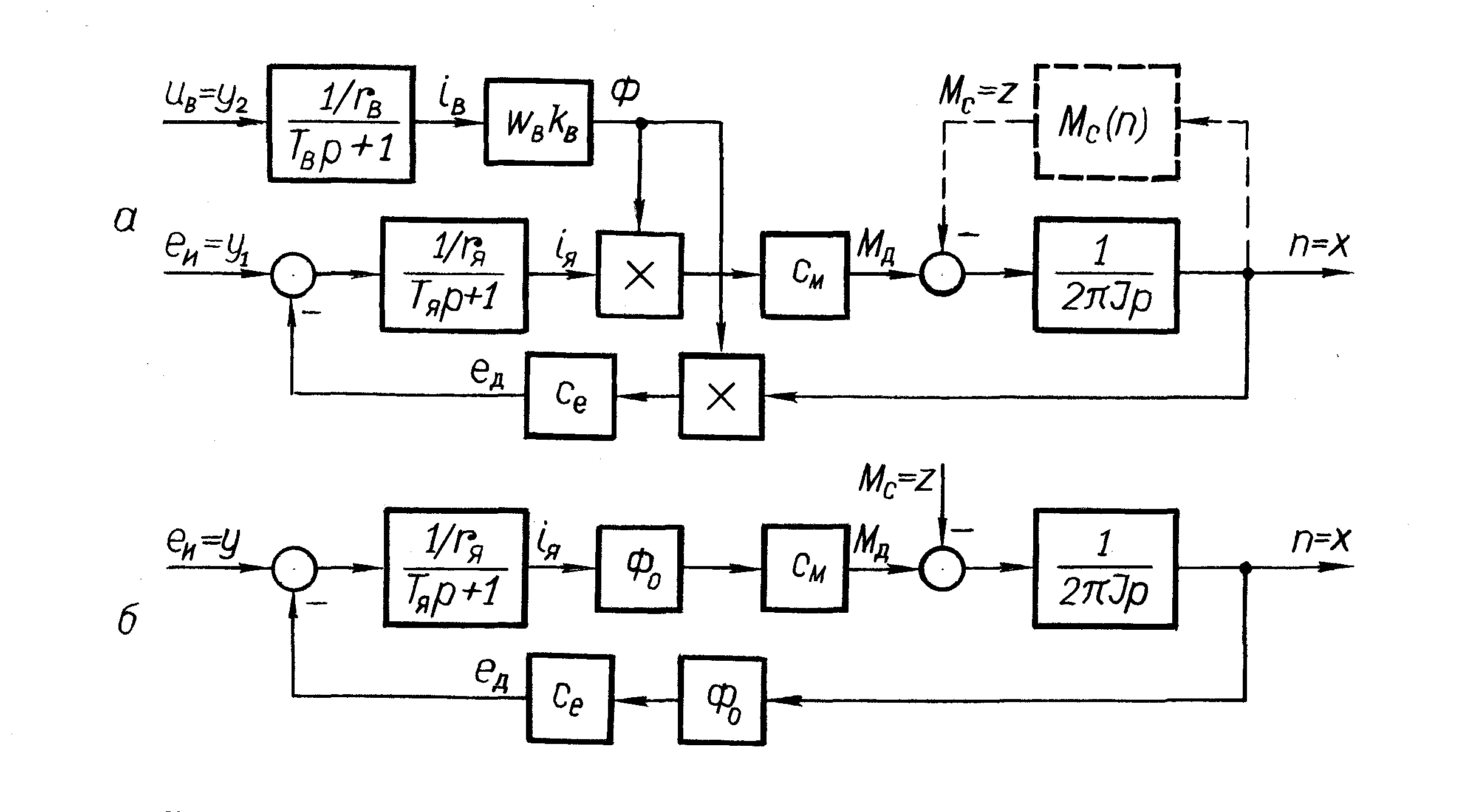
Рис. 4.4. Алгоритмическая схема двигателя
постоянного тока:
а– с регулируемым возбуждением;б– с постоянным возбуждением
Составим общее
уравнение двигателя для наиболее часто
применяемого варианта управления –
изменением напряжения якорной цепи при
постоянном возбуждении. Подставим
выражения (4.19) и (4.20) в уравнения (4.17) и
(4.18) и объединим последние в одно
уравнение. Для этого выразим из уравнения
моментов (4.17) ток и его производную:
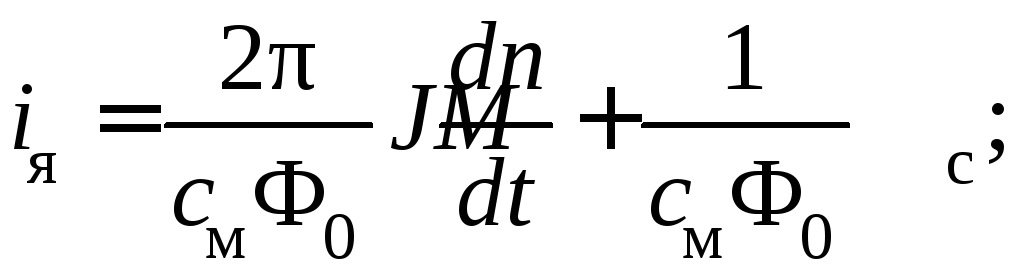 (4.21)
(4.21)
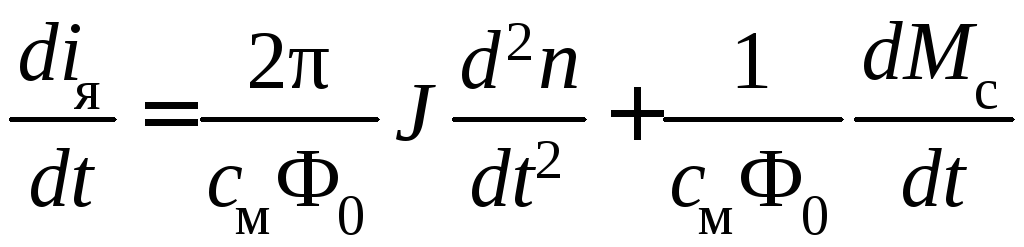 (4.22)
(4.22)
и подставим их в
уравнение напряжений (4.18). Тогда получим
 (4.23)
(4.23)
Введем следующие
обозначения:
![]() –электромеханическая
–электромеханическая
постоянная времени двигателя, с;
![]() —
—
электромагнитная постоянная времени,
с;
![]() –передаточный
–передаточный
коэффициент двигателя по управляющему
воздействию – напряжению, (1/с)/В;
![]() — передаточный
— передаточный
коэффициент двигателя по возмущающему
воздействию – моменту, 1/с/(Н∙м)
Разделив
предварительно левую и правую части
уравнения (4.23) на
![]() и используя введенные обозначения,
и используя введенные обозначения,
получим
уравнение динамики двигателя в
стандартной форме
 (4.24)
(4.24)
Переходя к
изображениям по Лапласу, можно из
уравнения (4.24) получить передаточные
функции двигателя:
по управляющему
воздействию – напряжению
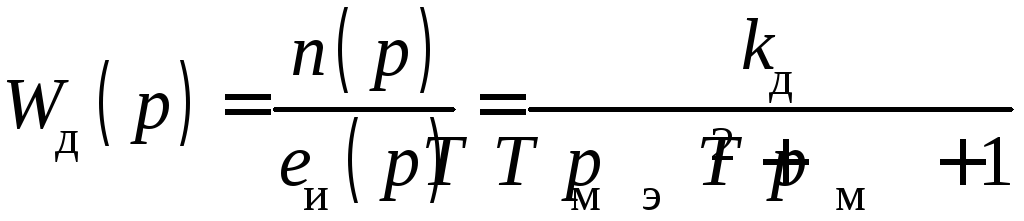 (4.25)
(4.25)
и по возмущающему
воздействию – моменту сопротивления
 (4.26)
(4.26)
Приравнивая в
уравнении (4.24) производные по времени
нулю, получим уравнение
статики двигателя:
![]() (4.27)
(4.27)
Выражение (4.27)
представляет собой уравнение механической
характеристики двигателя с независимым
возбуждением. Первое слагаемое
соответствует частоте вращения при
идеальном холостом ходе, а второе –
снижению частоты под нагрузкой.
Конструктивные
постоянные
![]() и
и![]() ,
,
входящие в выражения передаточных
коэффициентов, определяют по номинальным
данным двигателя:
 (4.28)
(4.28)
Так как индуктивность
якорной цепи в каталогах обычно не
указана, то постоянную времени
![]() определяют экспериментально или
определяют экспериментально или
вычисляют по приближенной формуле проф.
В. Б. Уманского
 (4.29)
(4.29)
где
![]() =
=
0,25 – для двигателей с компенсационной
обмоткой;![]() =
=
0,6 – без компенсационной обмотки.
Постоянная времени
якорной цепи двигателей составляет
обычно 0,1 – 0,5 с, а электромеханическая
постоянная может принимать значения
от 0,5 до 5 с.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Если в обмотке якоря и обмотке возбуждения машины постоянного тока пропускать постоянный ток, то машина придет во вращение, т. е. будет работать как двигатель.
Вращение ротора машины объясняется возникновением под влиянием магнитного поля механических сил, действующих на проводники с током обмотки якоря.
Направление механических сил, действующих на проводники, определяется правилом левой руки. Механические силы, действующие на проводники с током в магнитном поле, создают вращающий момент М (поворачивающий ротор).
Этот вращающий момент пропорционален магнитному потоку одного полюса Ф и силе тока I в якоре. Если k — коэффициент пропорциональности, зависящий от конструктивных данных машины, то М = kФI.
При работе электродвигателя его якорь вместе с проводниками обмотки вращается в магнитном поле. При этом проводники обмотки якоря пересекают магнитные линии. Согласно закону электромагнитной индукции в проводниках индуктируется э. д. с.
В соответствии с правилом правой руки индуктируемая в обмотке якоря при работе электродвигателя э. д. с. направлена навстречу току, а следовательно, и навстречу напряжению сети.
Поэтому э. д. с. электродвигателя называют обратной, или противо-э. д. с. — п. э. д. с. Величина п. э. д. с. двигателя определяется той же формулой, что и э. д. с. генератора,

Обратная э. д. с. уравновешивает напряжение, приложенное к зажимам двигателя, следовательно, мощность, расходуемая на преобразование электрической энергии в механическую, равна произведению обратной э. д. с. на силу тока, т. е. Р = ЕI.
Определим ток в якоре двигателя. Если двигатель питается током от сети, напряжение в которой равно U, и развивается п. э. д. с. Е, а сопротивление якоря двигателя равно rя, то ток в якоре

Так как сопротивление rя обмотки очень мало, а при пуске якорь еще не вращается и Е = 0, то ток при пуске двигателя Iя = U / rя может достигать чрезмерно больших значений, угрожающих целости якоря.
Обычно в момент пуска последовательно с якорем вводят дополнительное сопротивление — пусковой реостат (рис. 1), уменьшаемое по мере раскручивания двигателя, т. е. по мере увеличения п. э. д. с. Е. На рисунке справа показано условное обозначение реостата, слева цифрами 0, 1, 2, 3, 4, 5 обозначены клеммы. Начальное сопротивление rп пускового реостата выбирают таким, чтобы ток при пуске не превосходил значений, обеспечивающих целость якоря.
При включении пускового реостата ток в момент пуска

Сопротивление пускового реостата обычно выбирают таким, чтобы ток в момент пуска был равен 2,5—3 Iн, где Iн — ток в двигателе при полной нагрузке.
При отключении электродвигателя от сети он останавливается не сразу. В течение некоторого времени продолжается по инерции вращение двигателя и движение приводимого механизма. Для некоторых механизмов (грузовая лебедка, брашпиль и т. п.) задержка остановки является опасной. В этом случае, кроме механического торможения, осуществляемого тормозными колодками какого-либо тормоза, применяют также электрическое торможение — особый режим работы двигателя, при котором механические силы, действующие на его обмотки, препятствуют вращению ротора двигателя, т. е. останавливают двигатель.
Электрическое торможение производится:
а) включением реостата в цепь отключенного от сети электродвигателя (реостатное торможение, называемое также динамическим);
б) переменой направления тока в якоре, не отключаемого от сети электродвигателя (торможение обратным током-противотоком);
в) путем возврата двигателем электроэнергии в сеть, когда противоэлектродвижущая сила двигателя, остающегося приключенным к сети, но вращаемого не током, а внешней механической силой (например, весом опускаемого лебедкой груза), становится больше напряжения сети и электродвигатель начинает работать генератором, отдавая ток в сеть.
Реостатное торможение основано на том, что отключенный от сети электродвигатель, продолжая по инерции вращаться, работает в режиме генератора. Поэтому, если мы нагрузим этот генератор, замкнув его обмотку на какое-либо сопротивление, то запасенная в движущихся частях механизма энергия быстро израсходуется в нагрузке генератора, т. е. будет поглощена при нагреве сопротивления (реостата), и двигатель быстро остановится.
Применение торможения противотоком основано на том, что двигатель не отключается от сети, а лишь меняется направление приложенного напряжения сети. Двигатель переходит на режим работы генератора, и запасенная в движущихся частях механизма энергия превращается в тепловую. Для уменьшения величины тока, отдаваемого электродвигателем при торможении, в его цепь включают дополнительное сопротивление.
Особенность торможения с возвратом (рекуперацией) электроэнергии состоит в том, что при таком способе торможения электроэнергия, вырабатываемая двигателем, работающим в режиме генератора, поступает в сеть и может быть использована.
Поэтому такой способ торможения называют иногда полезным торможением.
Применимость того или иного способа торможения для различных типов двигателя будет разъяснена ниже.
В некоторых случаях условия работы приводного механизма требуют регулирования скорости вращения или изменения направления вращения (реверсирования) электродвигателя.
Обратимся к формуле для э. д. с. электродвигателя

Из этой формулы следует, что число оборотов электродвигателя зависит от напряжения питающей сети, сопротивления в цепи якоря и величины магнитного потока электродвигателя.Эта зависимость определяет три возможных способа регулировки скорости вращения электродвигателя.
При регулировке оборотов изменением напряжения сети для питания электродвигателя необходим специальный генератор с широким диапазоном регулирования напряжения. Такая система регулирования носит название системы генератор-электродвигатель (система Вард-Леонарда) и более подробно будет рассмотрена дальше. Пока отметим, что при этом способе возможна регулировка числа оборотов как вниз, так и вверх от номинальных (т. е. от оборотов, развиваемых электродвигателем при полной нагрузке и обозначаемых на щитке электродвигателя).
Включением в цепь якоря электродвигателя добавочного сопротивления (реостата) можно снизить число оборотов электродвигателя против номинальных. Такой способ регулирования требует громоздких реостатов, рассчитанных на полный ток якоря, и связан со значительными потерями мощности в последних. Эти обстоятельства обусловливают низкую экономичность регулирования оборотов методом добавочного сопротивления в цепи якоря.
Для уменьшения магнитного потока электродвигателя в цепь обмотки возбуждения включают регулировочный реостат. Вводя в цепь возбуждения необходимое число ступеней реостата, мы понижаем ток возбуждения и уменьшаем магнитный поток; при этом уменьшается противоэлектродвижущая сила, растет ток в якоре и якорь двигателя начинает вращаться быстрее.
Так как величина тока в цепи возбуждения невелика (2—3% от величины тока в якоре), то и регулировочный реостат, необходимый для ее изменения, получается небольшим и дешевым. Кроме того, незначительна и потеря в нем электроэнергии, превращающейся в тепло. Поэтому данный способ регулирования скорости является достаточно экономичным.
Чрезмерно уменьшать ток возбуждения нельзя, так как, с одной стороны, скорость вращения может увеличиться до значений, опасных для механической целости якоря, а с другой, с уменьшением потока уменьшается вращающий момент, развиваемый электродвигателем, и его работа становится неустойчивой.
Для изменения направления вращения электродвигателя надо изменить направление тока либо в обмотке якоря, либо в обмотке возбуждения.
При одновременном изменении направления тока в обеих обмотках, что легко проверить по правилу левой руки, направление вращения не изменится.
Классификация и свойства двигателей постоянного тока
В зависимости от способа соединения обмотки возбуждения различают двигатели возбуждения:
а) параллельного;
б) последовательного;
в) смешанного.
Свойства электродвигателя определяются взаимными зависимостями ряда величин (скорости вращения, вращающего момента, тока в якоре, тока в обмотке возбуждения и т. д.), которые обычно изображают графически. Основной характеристикой двигателя является механическая, представляющая зависимость числа оборотов двигателя от вращающего момента.
На рис. 2 показана принципиальная схема двигателя параллельного возбуждения. Обмотка якоря и обмотка возбуждения В рассматриваемого двигателя образуют две параллельные ветви.

Рис. 2. Принципиальная схема двигателя параллельного возбуждения
В цепь якоря включены пусковой реостат ПР и регулировочный реостат Rрг. В цепь обмотки возбуждения включен регулировочный реостат rш, служащий для изменения тока в обмотке возбуждения, а следовательно, и магнитного потока Ф.
Сила тока, потребляемая двигателем I, складывается из тока в обмотке якоря Iя и тока в обмотке возбуждения Iв.
В схеме: П — плавкие предохранители; Р — двухполюсный рубильник (выключатель).
Ток обмотки возбуждения определяется по закону Ома:

где rв — сопротивление обмотки возбуждения; rш — сопротивление регулировочного реостата.
Напряжение сети U и сопротивление цепи обмотки возбуждения rв + rш во время работы двигателя не изменяются (если мы во время работы не изменяем сопротивление регулировочного реостата), следовательно, ток Iв остается постоянным.
Постоянство тока обеспечивает постоянство магнитного потока, создаваемого обмоткой возбуждения.
Сравнительная независимость магнитного потока от нагрузки является основным свойством двигателя параллельного возбуждения, которым определяются две главные его особенности, а именно:
1) вращающий момент изменяется прямо пропорционально силе тока, так как магнитный поток практически не зависит от тока якоря. Это следует из формулы М = кФI
2) число оборотов двигателя при увеличении нагрузки (момента сопротивления на валу) незначительно падает. Это следует из формулы

(U, С и Ф постоянны; rя — сопротивление якоря — весьма мало, поэтому произведение тока в якоре на сопротивление обмотки якоря Iяrя незначительно). Так, разница между скоростью вращения ротора двигателя при отсутствии механической нагрузки (при работе вхолостую) и скоростью вращения при полной нагрузке в мощных двигателях параллельного возбуждения не превышает 6% и лишь в двигателях малой мощности (до 5 кВт) достигает 10—12%.
Таким образом, скорость вращения ротора двигателя параллельного возбуждения остается при изменениях нагрузки почти постоянной, т. е. двигатель обладает так называемой жесткой характеристикой.
Двигатели с параллельным возбуждением применяются для всех судовых вспомогательных механизмов, где требуется постоянство оборотов (насосы, станки и т. п.).
Для регулирования числа оборотов двигателя в схеме предусмотрены регулировочные реостаты Rрг в цепи якоря и rш в цепи возбуждения. Обычно применяют только регулировочный реостат rш.
Изменение направления вращения у двигателей параллельного возбуждения чаще всего осуществляется изменением направления тока в цепи якоря.
При реостатном торможении и при торможении с возвратом электроэнергии двигателя параллельного возбуждения никаких пересоединений его обмоток не требуется: достаточно по отключении его от сети замкнуть обмотку якоря на сопротивление. Чем меньше это сопротивление, тем скорее двигатель остановится; если допустимо замыкание обмотки якоря накоротко, остановка будет особенно быстрой.
На рис. 3 показана принципиальная схема двигателя последовательного возбуждения (обозначения в схеме те же, что и на рис. 2).

Рис.3. Принципиальная схема двигателя последовательного возбуждения
Обмотка возбуждения и обмотка якоря включены в цепь последовательно. По обмотке якоря и по обмотке возбуждения двигателя протекает один и тот же ток I, который определяется формулой
где rя — сопротивление обмотки якоря; rв — сопротивление обмотки возбуждения; U — напряжение на зажимах двигателя; Е — противо-э. д. с. якоря двигателя.
В отличие от двигателя параллельного возбуждения ток в обмотке возбуждения меняется с изменением нагрузки, так как обмотка возбуждения и обмотка якоря соединены последовательно.
Поэтому магнитный поток двигателя последовательного возбуждения меняется при изменении нагрузки.
Этим обстоятельством объясняются все особенности двигателя последовательного возбуждения. Вращающий момент двигателя определяется формулой М = кФI, но в этой формуле Ф — величина не постоянная, а зависящая от тока I.
При малых значениях тока магнитная цепь не насыщена и магнитный поток прямо пропорционален току Ф = k1I. Тогда мы имеем М = kk1I2, т. е. вращающий момент пропорционален квадрату тока. Здесь k и k1 — коэффициенты пропорциональности.
При больших токах магнитная цепь насыщается и поток при изменении тока изменяется незначительно. Таким образом, при больших токах характеристики двигателя последовательного возбуждения аналогичны характеристикам двигателей параллельного возбуждения. Пусковой момент двигателя (момент при пуске) последовательного возбуждения будет больше пускового момента двигателя параллельного возбуждения, т. е. двигатель последовательного возбуждения возьмет «легче с места» под нагрузкой, чем двигатель параллельного возбуждения.
Обороты двигателя последовательного возбуждения резко уменьшаются с увеличением нагрузки (момента сопротивления на валу). Поэтому механическую характеристику этого двигателя называют мягкой.
При значительном уменьшении нагрузки и вместе с ней магнитного потока Ф двигатель начинает развивать очень большую скорость, или, как говорят, «идет в разнос». Разнос двигателя очень опасен, так как связан с разрушением обмотки якоря и другими механическими повреждениями. Поэтому двигатель последовательного возбуждения нельзя пускать без нагрузки, т. е. вхолостую. Ременная передача от этих двигателей к приводимым механизмам недопустима, так как обрыв приводного ремня (идущего к механизму) влечет за собой разнос двигателя.
Двигатель последовательного возбуждения, имея хорошие пусковые свойства и мягкую характеристику, находит широкое применение для палубных вспомогательных механизмов (грузоподъемных устройств, шпиля, брашпиля).
Регулирование числа оборотов двигателя последовательного возбуждения осуществляется изменением сопротивления (Rрг на рис. 3), включенного последовательно обмотке якоря, т. е. изменением и тока якоря и тока возбуждения (т. е. потока) или изменением сопротивления, включенного параллельно обмотке возбуждения, т. е. изменением тока возбуждения (изменением потока).
Перемена направления вращения двигателей последовательного возбуждения осуществляется аналогично двигателю параллельного возбуждения обычно изменением направления тока в якоре.
При динамическом торможении обмотки двигателя последовательного возбуждения должны быть переключены. Если не переключить обмотки, то при переходе двигателя в режим генератора направление тока в обмотке якоря должно измениться на обратное первоначальному. В процессе такого изменения тока машина размагничивается, после чего ротор машины ведет себя как простая вращающаяся масса. Чаще вместо переключения обмотки возбуждения ее оставляют подключенной к сети, а якорь замыкают на тормозное сопротивление.
Торможение противотоком двигателей последовательного возбуждения возможно только при переключении внутренних цепей, так

Рис. 4. Принципиальная схема двигателя смешанного возбуждения

Рис. 5. Механические характеристики двигателей параллельного возбуждения 1, последовательного возбуждения 2 и смешанного возбуждения 3.
как при изменении направления тока в якоре такого двигателя изменяется и направление тока возбуждения, следовательно, и потока возбуждения. При одновременном изменении направления тока в проводнике и магнитного потока поля, в котором находится проводник, направление механической силы, действующей на проводник, не изменяется.
Торможение с возвратом энергии возможно только, если обмотку последовательного возбуждения использовать как обмотку параллельного возбуждения.
Принципиальная схема двигателя смешанного возбуждения изображена на рис. 4.
Двигатель смешанного возбуждения имеет две обмотки возбуждения: одну последовательную Вс, другую параллельную Вш. Пускаются и управляются двигатели смешанного возбуждения при помощи пускового ПР и регулировочного rш реостатов. В этом двигателе совмещаются достоинства двигателей последовательного и параллельного возбуждения.
В зависимости от соотношения числа ампер-витков, создаваемого током в последовательной и параллельной обмотках возбуждения, характеристики этих двигателей приближаются соответственно к характеристикам двигателей последовательного или параллельного возбуждения.
На рис. 5 показаны механические характеристики двигателей параллельного возбуждения 1, последовательного возбуждения 2 и смешанного возбуждения 3.
Коэффициент полезного действия машин постоянного тока
В каждой электрической машине постоянного тока происходят следующие потери энергии:
1) потери, связанные с нагревом током меди обмоток якоря и обмоток возбуждения (тепло Ленца);
2) потери в стали якоря; при вращении якоря в магнитном поле происходят: а) перемагничивание стали якоря, сопровождающееся его нагреванием; б) потери в стали якоря на нагревание, вызванные вихревыми токами;
3) потери, связанные с трением в подшипниках, трением щеток о коллектор, трением вращающихся частей о воздух и т. д.
Обозначая потерю мощности в меди Рм, потерю мощности в стали Pст, потерю мощности от трения Рт, получим формулу для определения к. п. д. генератора

где UI — мощность, отдаваемая генератором потребителям тока. Коэффициент полезного действия двигателя постоянного тока

UI — мощность, подводимая к двигателю;
U — напряжение сети;
I — величина тока, питающего двигатель.