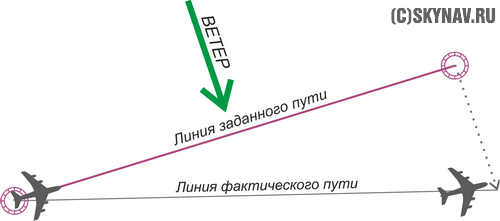
 В первую очередь необходимо определиться, что такое ветер. Ветер – это перемещение воздушных масс из одной точки в другую. Как известно, любое воздушное судно перемещается внутри воздушной массы. А что если воздушная масса, в которой проходит полет, также перемещается относительно земли? Помимо движения с собственной скоростью относительно воздушной массы, самолет будет перемещаться еще и со скоростью движения этой воздушной массы. Учитывая то, что скорость ветра на высотах может достигать значений более 200-300 км/ч, становится очевидно, что учет ветра в полете крайне важен. Несложно посчитать, что если при таком ветре (предположим строго боковом) выполнять полет по трассе в течение одного часа и при этом не учитывать ветер, то в итоге через час самолет окажется в 200-300 км в стороне от трассы. В случае же, если это ветер встречный, и экипаж не учтет его на этапе подготовки к полету, может элементарно не хватить топлива до аэродрома назначения.
В первую очередь необходимо определиться, что такое ветер. Ветер – это перемещение воздушных масс из одной точки в другую. Как известно, любое воздушное судно перемещается внутри воздушной массы. А что если воздушная масса, в которой проходит полет, также перемещается относительно земли? Помимо движения с собственной скоростью относительно воздушной массы, самолет будет перемещаться еще и со скоростью движения этой воздушной массы. Учитывая то, что скорость ветра на высотах может достигать значений более 200-300 км/ч, становится очевидно, что учет ветра в полете крайне важен. Несложно посчитать, что если при таком ветре (предположим строго боковом) выполнять полет по трассе в течение одного часа и при этом не учитывать ветер, то в итоге через час самолет окажется в 200-300 км в стороне от трассы. В случае же, если это ветер встречный, и экипаж не учтет его на этапе подготовки к полету, может элементарно не хватить топлива до аэродрома назначения.
Истинная и путевая скорость.
При учете влияния ветра на полет различают два вида скоростей: истинная воздушная скорость (обозначается Vи или по-английски TAS – true airspeed) и путевая скорость (обозначается W или по-английски GS – ground speed).
Истинная воздушная скорость – это скорость движения воздушного судна относительно воздушной массы, в которой проходит полет.
Путевая скорость – скорость воздушного судна относительно земли.
Следует запомнить, что ветер не оказывает влияния на истинную воздушную скорость. Влияние ветра сказывается только на путевой скорости.
Курс и путевой угол.
По аналогии со скоростью, при учете ветра различают два направления полета воздушного судна: курс (HDG – heading) и путевой угол (обозначается ПУ, по-английски TRK — track).
Курс – это угол, заключенный между северным направлением меридиана, принятого за начало отсчета и продольной осью воздушного судна.
Путевой угол – это угол, заключенный между северным направлением меридиана, принятого за начало отсчета, и линией пути. Различают фактический путевой угол (ФПУ) и заданный путевой угол (ЗПУ).
Что касается отсчета направлений, в навигации применяются несколько меридианов начала отсчета: истинный, магнитный, опорный. При решении задач, связанных с учетом ветра, при условии, что все величины приведены к одному и тому же меридиану, неважно, какие направления применяются, истинные или магнитные.
Направление ветра.
В аэронавигации различают два вида ветра: навигационный (НВ) и метеорологический, их направления различаются на 180 градусов и на магнитное склонение. Дело в том, что в основном в авиации принято все расчеты выполнять от магнитного меридиана, в то время как в метеорологии гораздо удобнее пользоваться истинным направлением меридиана начала отсчета.
Навигационный ветер – угол между северным направлением меридиана, принятого за начало отсчета и направлением, куда дует ветер.
Метеорологический ветер – угол между северным направлением меридиана, принятого за начало отсчета и направлением, откуда дует ветер.
Навигационный ветер применяется исключительно как вспомогательная величина при расчетах. Метеорологическое направление ветра – та величина, к которой привык каждый из нас. Юго-западный ветер, означает, что ветер дует с Юго-запада, или если пересчитать в градусы, то получим направление 225 градусов, именно в таком виде и применяется значение направления ветра в авиации.
Навигационный треугольник скоростей.
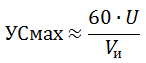
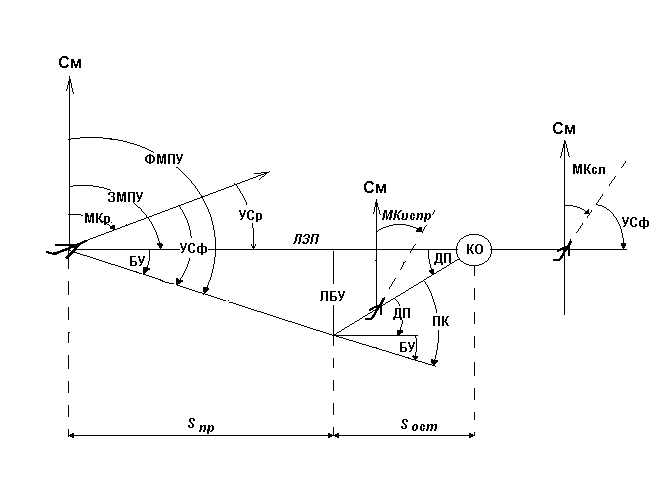
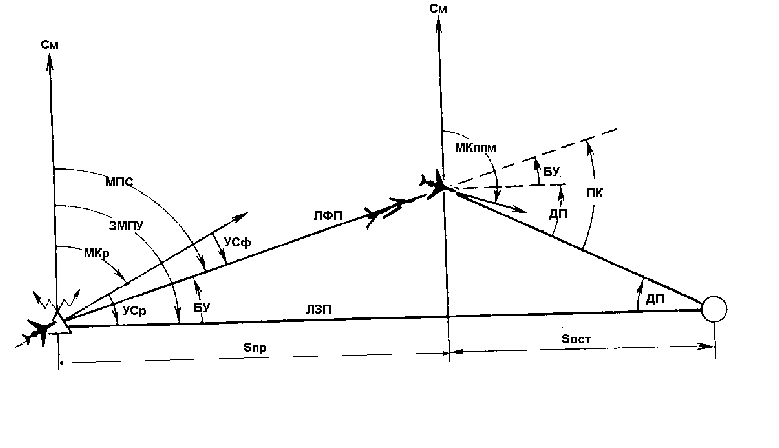
Как известно, скорость величина векторная. Вектора воздушной скорости, ветра, и путевой скорости образуют так называемый навигационный треугольник скоростей (НТС) – основу основ аэронавигации. Применяя общие правила геометрии и тригонометрии можно вычислить все величины и углы, зная направление и величину двух векторов.
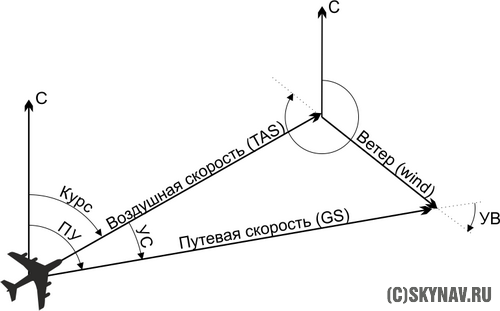
Как видно из рисунка, полет самолета проходит по определенной траектории – линии заданного пути, которая соответствует вектору путевой скорости, однако продольная ось самолета отвернута на ветер для компенсации сноса, как мы помним, продольная ось соответствует вектору воздушной скорости.
Таким образом, мы получили угол, на который нужно отвернуть на ветер, чтобы полет проходил по трассе, это и есть угол сноса – УС (по-английски WCA – wind correction angle или drift angle).
Другими словами, это угол, заключенный между векторам воздушной и путевой скоростей. Отсчитывается угол сноса всегда от вектора воздушной скорости по часовой стрелке (как в нашем случае) со знаком плюс, против часовой – со знаком минус.
Чтобы вычислить скорректированный на ветер курс полета, необходимо из путевого угла вычесть угол сноса со своим знаком.
![]()
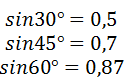
Расчет угла сноса и путевой скорости.
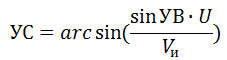
Для вычисления угла сноса и путевой скорости, необходимо вычислить вспомогательную величину, которая называется угол ветра (УВ) – угол, заключенный между вектором путевой скорости и вектором ветра, то есть, это направление ветра с привязкой к направлению движения воздушного судна.
![]()
Напомним, что навигационный ветер (НВ) отличается от метеорологического на 180 градусов и, как правило, на величину магнитного склонения.
С помощью теоремы синусов получаем и формулу угла сноса:
Эту формулу легко упростить, выразив угловые величины в радианах:
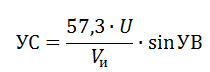
U – скорость ветра, Vи – истинная воздушная скорость. Для корректного расчета обе этих величины должны быть приведены к одной единице измерения, например к узлам или метрам в секунду. На практике вместо постоянного значения 57,3 применяют 60, что дает минимальную ошибку, но значительно упрощает вычисление угла сноса в уме.
Формула путевой скорости выводится методом проецирования векторов воздушной скорости и ветра на соответствующую ось и выглядит следующим образом:
![]()
При небольших значениях угла сноса можно использовать упрощенную формулу:
![]()
Если в России традиционно угол сноса принято вычислять со знаком плюс или минус, то на западе пилотов учат несколько по-другому: сам угол вычисляется как модульная величина, к которой добавляется буквы R или L, R означает, что ось самолета нужно развернуть против ветра вправо, то есть прибавить угол сноса к путевому углу, а L – наоборот влево, то есть угол сноса вычитается из путевого угла. Кроме того, вычисление угла сноса и путевой скорости в основном производится не по формулам, а с помощью механического компьютера E6B и его аналогов.
Считаем в уме.
Существует простой алгоритм вычисления угла сноса в уме.В первую очередь необходимо вычислить максимальный угол сноса при данном ветре. Как легко догадаться, максимальным он будет при боковом ветре, то есть при угле ветра в 90 градусов, а поскольку синус 90 градусов равен единице, эту часть формулы упраздняем и получаем:
Прикинув максимальное значение угла сноса, его нужно скорректировать на направление, что легко делается в уме, если знать значения синусов основных углов:
Знак же определяется исходя из направления ветра, если ветер дует в правый борт, то минус, если в левый, то плюс.
Зная косинусы основных углов легко также в уме вычислить продольную составляющую ветра, которая в свою очередь позволит вычислить путевую скорость.
Для примера рассчитаем в уме угол сноса и путевую скорость для самолета Боинг-737 при заходе на посадку, имея следующие данные:
Определяем максимальный угол сноса: 12˚, корректируем на направление ветра. Ветер встречно-боковой в правый борт под 30˚, таким образом, угол сноса равен минус 6˚, то есть необходимо довернуть вправо против ветра на 6˚. Далее рассчитываем встречную составляющую ветра: 26 узлов. Вычитаем ее из воздушной скорости, получаем путевую скорость на глиссаде 114 узлов.
Оглавление
Введение
1. Определение навигационных элементов на контрольном этапе
2. Определение угла сноса
3. Определение угла сноса с использованием АРК
4. Определение путевой скорости./W/
5. Определение ветра в полёте
Заключение
Список используемой литературы
После того, как человек преодолел земное притяжение и научился летать, сразу же возникла необходимость в решении навигационных задач (определение места воздушного судна, направления, скорости и времени полета).
Для их решения при подготовке к полету и в процессе его выполнения используются навигационные карты. Перед полетом выбирается и прокладывается наивыгоднейший маршрут, измеряются длины этапов, путевые углы, намечаются контрольные ориентиры, рассчитывается время полета, обозначаются естественные и искусственные препятствия и наносится магнитное склонение.
В ходе выполнения полета карта используется для визуальной ориентировки и определения навигационных элементов (путевая скорость, угол сноса, время полета).
Комплекс действий экипажа (пилота) в полете по выдерживанию заданного маршрута, определению места воздушного судна, выводу его на заданную цель в заданное время и на заданной высоте называется самолетовождением.
Гражданская авиация – это особый вид транспорта, который требует всесторонней подготовки авиационных специалистов. Для вождения воздушных судов (ВС) по установленным маршрутам требуются глубокие знания воздушной навигации — прикладной авиационной науки о точном, надёжном и безопасном вождении ВС из одной точки земной поверхности в другую по установленной пространственно-временной траектории. Таким образом, основной задачей воздушной навигации является обеспечение точного полёта по заданной траектории, то есть воздушная навигация в практическом плане есть процесс определения пространственного места самолёта, его скорости, направления движения, а также требуемых параметров для полёта по программной траектории.
В данной работе изложены пути, и способы определение навигационных элементов в полёте. Для точного самолётовождения экипаж должен знать значение величин угла сноса (УС) и путевой скорости (W), которые в полёте не остаются постоянными. Это вызывает необходимость периодически повторять их определение. Для практики самолётовождения важно знать, какое влияние УС и W оказывают изменения параметров ветра и пилотажного режима полёта. Пилот должен знать и уметь определять фактические навигационные элементы в полёте, так как это является неотъемлемой частью первоначального обучения самолётовождению.
Важность выбранной темы курсовой работы определяется жизненными обстоятельствами. Отличное усвоение методик определения навигационных элементов является залогом безопасности, экономической целесообразности и регулярности полётов.
Для ведения контроля пути нужно знать фактическую путевую скорость и угол сноса. При отсутствии на самолете навигационных средств для автоматического измерения этих элементов, последние могут быть определены на контрольном этапе.
Контрольный этап-это участок линии пути на котором определяются фактические навигационные элементы и, если необходимо, ветер в полёте. Контрольный этап выбирается экипажем на первом участке маршрута и на последующих через 1,5-2 часа полёта. Его входной и выходной ориентиры выбираются с учетом надежности их опознавания с высоты полета.
На контрольном этапе порядок работы экипажа следующий:
1. При подлете к входному ориентиру предупредить командира корабля о строгом выдерживании режима полета.
2. Над входным ориентиром пустить секундомер, дать командиру корабля команду «Промер» и приступить к измерению угла сноса и определению среднего курса.
3. При проходе выходного ориентира остановить секундомер.
4. По расстоянию и времени пролета контрольного этапа определить путевую скорость.
Данные, полученные на контрольном этапе, используют для контроля пути, определения направления и скорости ветра, по которым рассчитываются навигационные элементы для последующего участка маршрута.
Точность определения путевой скорости на контрольном этапе составляет 2—5% измеренной скорости, а угла сноса со средней квадратической погрешностью 2-3 градуса. Основной причиной погрешности в определении путевой скорости являются ошибки в определении места самолета в начале и в конце контрольного этапа. Для более точного определения путевой скорости и угла сноса необходимо возможно строже выдерживать на контрольном этапе режим полета, правильно наносить на карту отметки места самолета , точно фиксировать по секундомеру моменты прохода входного и выходного ориентиров, точность измерения ФИПУ и расстояния на карте, а также выбору оптимальной длинны контрольного этапа. При скорости полёта 200-300км/ч длинна КЭ достаточна 20-30 км; при скорости 300-500 км/ч-50-70км; при скорости 500-800 км/ч -70-130 км.
В случае отсутствия характерных ориентиров для выбора контрольного этапа, а также при полете вне видимости земной поверхности определение путевой скорости и угла сноса производится с помощью радиотехнических средств.
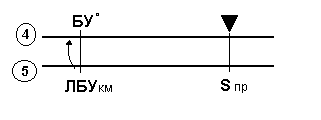
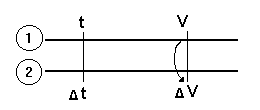
вход-й Sкэ вых-й

tвх БУ ЛБУ
tвых
![]() ЛБУ с карты
ЛБУ с карты
БУ=ЛБУ*60/Sкэ
УСф=УСр+(+/-БУ)
Wф=Sкэ/tкэ
2. Определение угла сноса
Так как СЛА в основном не обеспечены навигационными счетными устройствами, пилот должен уметь приближенно «в уме» рассчитывать путевую скорость, угол сноса по воздушной скорости, заданному путевому углу и ветру (скорости и направлению).
Расчет угла сноса «в уме» наиболее просто выполняется по приближенной формуле:
УС = УС макс SIN(yB) УС макс = U/K К = V/60
Где: U — скорость ветра; УВ — угол ветра; К — коэффициент.
Для самолета типа Як-18Т К = 2 (120/60=2). Для приближенного расчета УС достаточно запомнить значения sin УВ для углов, кратных 30 градусам (см. табл.1).
Таблица 1
| УВ | sin УВ | УС |
| 0 (180) | 0 | 0 |
| 30, 150 (210, 330) | 0,5 | 0,5 УС макс |
| 60, 120 (240, 300) | 0,8 | 0,8 УС макс |
| 90 (270) | 1,0 | УС макс |
Существует несколько способов определения УС глазомерно.
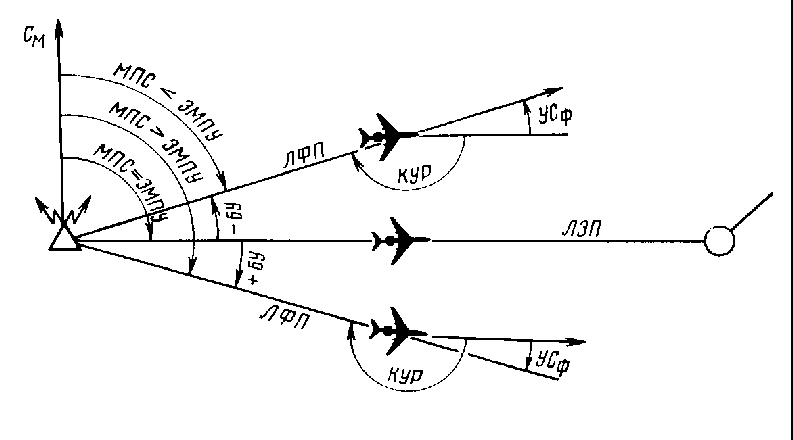
1. По линейному ориентиру

Этот способ применяется, если полет выполняется вблизи и вдоль линейного ориентира. Для этого подбирается такой курс, при котором самолет перемещался бы параллельно линейному ориентиру.
УС = ЗМПУ — МК
где МК — средний подобранный курс;
ЗМПУ — заданный магнитно-путевой угол (снимается с карты).
2. По створу ориентиров

УС этим способом определяется как разность между направлением створа двух — трех ориентиров, имеющихся на линии заданного пути, и средним курсом полета, обеспечивающим полет вдоль створа ориентиров или параллельно ему.
УС = ЗМПУ — МК
где МК — средний подобранный курс.
3. По боковому уклонению от контрольного ориентира УС этим способом определяется в тех случаях, когда полет от ориентира выполняется с курсом, равным ЗПУ.

УС = ЛБУ/Snp*60,
где ЛБУ — линейное боковое уклонение от контрольного ориентира;
Snp — пройденное расстояние от контрольного ориентира. Знак УС определяется стороной ЛБУ.
УС можно определить «на глаз» или с помощью навигационного транспортира.
4. Подбором курса
Если пилот убедился, что нет смещения самолета относительно линии пути, произвести отсчет магнитного курса. При этом

УС = ЗМПУ — МК
где МК — средний подобранный курс.
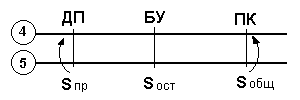
ОПРЕДЕЛЕНИЕ ПОПРАВКИ в КУРС (ПК) у контрольного ориентира (КО) по величине бокового уклонения (БУ) (рис.9)
Socm = 2 Snp, то ПК = 1,5 БУ Socm = Snp, то ПК = 2 БУ Socm = 0,5 Snp, то ПК = 3 БУ
Угол сноса (УС) в зависимости от навигационной обстановки и навигационного оборудования самолета также определяется:
измерением с помощью визира;
измерением с помощью радиотехнических средств;
по известному среднему курсу и фактической линии пути, проложенной на карте;
Способы измерения угла сноса с помощью визира могут быть следующие:
“по бегу земли”;
обратным визированием;
визированием вперед под углом 45°;
по боковой визирной точке.
-Измерение угла сноса по “бегу земли” (визирных точек)
Для измерения угла сноса визир устанавливается на курсовой угол 180°, вертикальный угол визира на 0° (петелька в поле зрения — на деление 0°), пузырек уровня приводится в центр перекрестия сетки визира.
Окуляр визира устанавливается на необходимую для штурмана резкость изображения.
После указанных установок на визире и пяте штурманом подается летчику команда “Промер”.
Летчик обязан установить заданный режим полета (курс, скорость и высоту) с максимально возможной точностью.
Промер угла сноса производится после того, как летчик установит заданный режим полета и компас успокоится. Наблюдая через визир за местностью, добиваются поворотом трубы визира, чтобы визирные точки перемещались параллельно курсовой черте, после чего замечается показание компаса, а затем показание шкалы сноса.
Таких измерений требуется произвести не менее трех. Чем больше будет разница в отсчетах, тем больше следует произвести измерений. Возможная ошибка данного способа при многократном измерении угла сноса 1—2°.
Данный способ применяется на бреющем полете, на малых и средних высотах до 800 м.
-Измерение угла сноса обратным визированием
Для измерения угла сноса обратным визированием необходимо установить визир так, чтобы подвижная призма была обращена в хвост самолета, затем, вращая барабан вертикальных углов, устанавливают петельку на нуль. Визир держат в таком положении, чтобы пузырек уровня находился в центре поля зрения. Летчик при промере должен строго сохранять заданный режим полета и курс.
Штурман, держа визир в строго отвесном положении, наблюдает за местностью и ожидает, когда через пузырек визира пройдет какая-либо заметная визирная точка. Затем он следит за ней, не вращая визира в пяте. Когда визирная точка удалится от вертикали, штурман быстрым поворотом визира в пяте добивается такого положения, чтобы визирная точка оказалась на курсовой черте.
В этот момент штурман замечает показание компаса и отсчитывает угол сноса по шкале на пяте визира.
Практически бывает достаточным при средних высотах визирование выполнять под вертикальным углом 40—50°, при больших высотах — под вертикальным углом 25—35°.
Для получения более точных результатов визирование одной точки производят два раза: первый раз под углом 20—30° при средних высотах и под углом 15—20° при больших высотах; второй раз под углом 40—50° при средних высотах и под углом 25 -35° при больших высотах.
Измерение угла сноса повторяется несколько раз, после чего берется среднее значение угла сноса и средний курс во время промера.
В тех случаях, когда возможно произвести только однократный промер, угол сноса определяют уточненным способом. Этот способ заключается в том, что в момент выбора визирной точки под самолетом приступают к определению среднего курса самолета.
В момент максимального удаления визирной точки отсчитывают курс и угол сноса. К измеренному углу сноса алгебраически прибавляют поправку, равную разности между последним отсчетом курса и средним курсом.
Пример. Магнитный курс во время отсчета угла сноса равен 95°. Средний магнитный курс во время промера равен 97°. Измеренный угол сноса + 8°. Найти правильное значение угла сноса.
Решение. 95°—97° = —2°;
УС = +8° + (—2°) = +6°.
-Измерение угла сноса визированием вперед
Определение угла сноса визированием вперед заключается в том, что под некоторым вертикальным углом, при курсовом угле визира 0° (подвижная призма обращена вперед), выбирается впереди самолета на линии курса визирная точка и в момент прихода ее на траверс к линии курса определяется боковое уклонение.
Угол сноса рассчитывается по формуле:
УС = БУ / tg ВУ
где БУ — боковое уклонение визирной точки на траверсе к линии курса;
ВУ — вертикальный угол визирования.
Боковое уклонение выбранной визирной точки определяется по градусным делениям поперечной черты визира.
При вертикальном угле 45° угол сноса равняется боковому уклонению, при ВУ = 26°,5, УС = 2 БУ, при ВУ = 63°,5 УС.= 0,5 БУ. Знак угла сноса определяется по стороне бокового уклонения визирной точки.
Рассмотрим порядок работы экипажа при промере угла сноса этим способом.
После команды штурмана «Промер» летчик выдерживает с максимальной точностью режим полета. Штурман, установив визир на курсовой угол 0° и вертикальный угол 45° (26°,5 или 63°,5), приступает к выбору визирной точки. Визирная точка должна пройти через центр пузырька уровня. Зафиксировав визирную точку в центре пузырька уровня, в дальнейшем барабаном вертикальных углов удерживает ее в передней части поля зрения прицела. Когда петелька придет на 0°, штурман прекращает вращение барабана вертикальных углов и в момент пересечения визирной точкой поперечной черты читает боковое уклонение и курс самолета.
Для получения необходимой точности нужно произвести несколько определений угла сноса и курса самолета. Результаты нескольких измерений осреднить. В зависимости от вертикального угла и бокового уклонения рассчитать угол сноса.
Описанный способ применяется ночью и на больших высотах, при отсутствии болтанки, а также при использовании визиров, при помощи которых нельзя определить угол сноса обратным визированием.
-Определение угла сноса двухкратным пеленгованием визирной точки
Определение угла сноса двухкратным пеленгованием визирной точки заключается в том, что на некотором вертикальном угле под курсовым углом 45° или 315° выбирается визирная точка. Когда визирная точка вторично окажется на том же вертикальном угле, вторично определяется ее курсовой угол.
Угол сноса рассчитывается по формуле:
УС = (КУ2 — 135) / 2
при визировании с правого борта или
УС = (КУ2 — 225) / 2
при визировании с левого борта,
где КУ2 — курсовой угол при втором визировании.
Как правило, этот способ применяется при полетах ночью и над морем, причем в тех случаях, когда нельзя измерить УС обратным визированием или по бегу земных ориентиров. При определении угла сноса визир устанавливается на курсовой угол 45°, если визирная точка с правого борта, или на курсовой угол 315°, если она с левого борта.
Промер угла сноса следует выполнять после того, как летчик установит заданный режим полета и картушка компаса успокоится. Небольшими поворотами барабана вертикальных углов, не меняя установленного курсового угла (45° или 315°), привести характерную визирную точку в центр пузырька уровня. После этого вращение барабана прекратить.
Вращением визира в пяте удерживать визирную точку на курсовой черте.
Сначала выбранная визирная точка отойдет от пузырька уровня, а затем, когда самолет пройдет траверс точки, она снова станет перемещаться к пузырьку. Вращением визира в пяте необходимо привести визирную точку в пузырек уровня.
В момент прихода визирной точки в центр пузырька произвести отсчет показания компаса и курсового угла при втором визировании и рассчитать угол сноса но указанным выше формулам.
Точность определения угла сноса данным способом 2—3°.
3. Определение угла сноса с использованием АРК
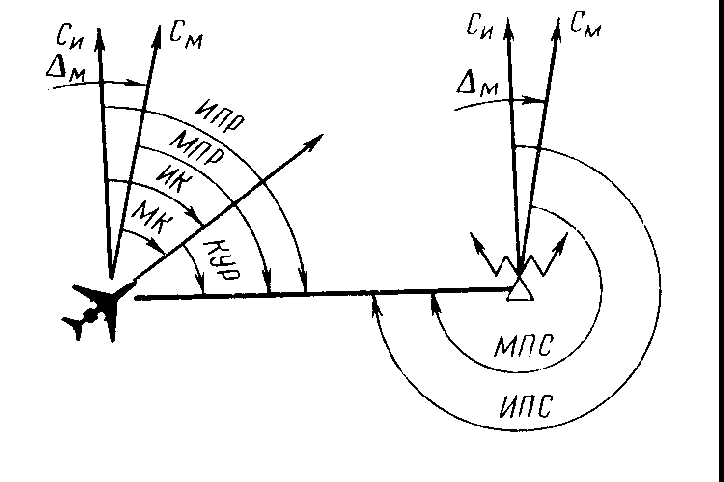
Автоматический радиокомпас (АРК.) — бортовое приемное устройство направленного действия, позволяющее определять направление на передающую радиостанцию. АРК совместно с наземными приводными и радиовещательными станциями образует угломерную систему самолетовождения.
При использовании радиокомпаса для самолетовождения экипажу необходимо знать следующие данные о приводных и радиовещательных станциях; место расположения (координаты); частоту работы и позывные; вид передачи; время работы и мощность.
Полёт от радиостанции в заданном направлении может быть выполнен в том случае, если она расположена на ЛЗП или её продолжении.
Контроль пути в полёте выполняют сравнением МПС с ЗМПУ.
В результате определяют боковое уклонение ВС от ЛЗП. Если МПС = ЗМПУ или отличается не более чем на 2°, то ВС находится на ЛЗП, если МПС больше ЗМПУ, то ВС находится правее ЛЗП, а если меньше — левее. Боковое уклонение и фактический угол сноса определяют по формулам:
БУ = МПС-ЗМПУ;
УСф = МПС-МК,
УСф = КУР -180°.
Магнитный пеленг
ВС МПС = МК+КУР±180°.
В практике МПС определяют по упрощенной формуле
МПС = МК±α,
где α = КУР— 180°. Знак «плюс» берется, если КУР>180°, знак «минус», если КУР<180°. При КУР=180° МПС = МК.
Пример. ЗМПУ=124°; МКР=135°; КУР=175°. Найти МПС, БУ и УСф. Решение. I. МПС = МК±α = 135°-5° = 130°.
2. БУ = МПС — ЗМПУ = 130° — 124° = + 6°.
3. УСф = КУР-180° = 175°- 180°= -5° или УСФ = МПС-МКР= 130°-135° = -5°.

Выполняя контроль пути по направлению с помощью АРК, следует учитывать, что радиопеленги определяют с погрешностями. Поэтому при равенстве МПС = ЗМПУ нельзя с полной уверенностью утверждать, что ВС находится на ЛЗП. В этом случае данное равенство всего лишь означает, что такое положение ВС наиболее вероятно, хотя в действительности оно может оказаться в стороне от ЛЗП.
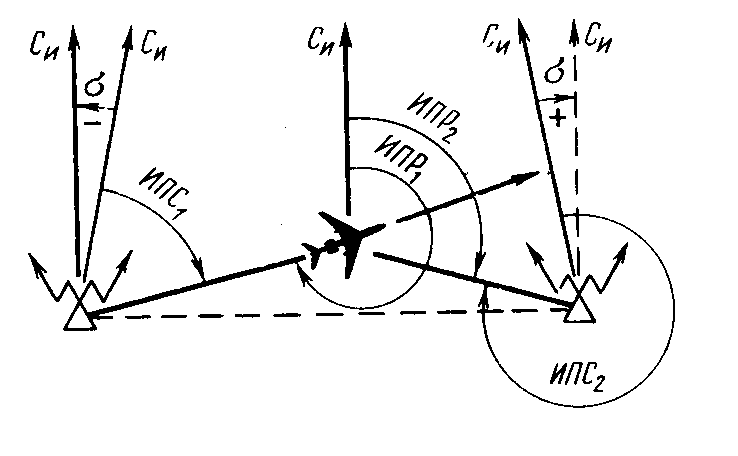
При значительном уклонении ВС от ЛЗП, а также в случаях, когда необходимо строго следовать по ЛЗП, применяется полёт от радиостанции с выходом на ЛЗП.
Порядок выполнения полёта следующий:
точно проходят радиостанцию с МКр; через 5—15 мин полета отсчитывают КУР и рассчитывают
МПС = МК+КУР± 180°
или МПС = МК±α;
определяют сторону и значение бокового уклонения
БУ = МПС —ЗМПУ;
УСФ = КУР — 180°;
задаются углом выхода (20—90°), рассчитывают МКвых и выводят ВС на ЛЗП; МКи= ЗМПУ±УВЫХ (« + » при левом уклонении, «—» при правом уклонении) ; определяют момент выхода ВС на ЛЗП по КУРвых= 180°±Увых (« — » при правом уклонении, « — » при левом уклонении); после выхода на ЛЗП устанавливают ВС на МК™ = МКР — ( ±БУ) или МКс-л = ЗМПУ — ( ±УСф); при полете по ЛЗП ведут контроль пути по направлению по КУРсп или МПСС.П: КУРст = 180° + (=ь УСФ); МПСС1 = = ЗМПУ.
 |
|||

![]() ЗМПУ
ЗМПУ
![]()
![]() МПС
МПС
 |
|||
 |
Пример. ЗМПУ = 90°; МКр = 88°; КУР=188°; Увых = 30ۨ. Определить данные для выхода и полета по ЛЗП.
Решение I. Находим МПС = МК±α = 88° + 8° =96°; БУ=МПС-ЗМПУ 96°-90°= +6°; УСф = КУР-180ۨ=188ۨ-180ۨ = +8°.
2. Рассчитываем МКвых = ЗМПУ±Увых = 90ۨ-30ۨ = 60°; КУРвых = 180°±Увых= 180+ 30° = 210°
3 Находим МКсл = МКр-(±БУ)=88°-( + 6°) = 82°. КУРСЛ= 180° + (±УСф) 180° + ( + 8°)=188°.
4. Определение путевой скорости./W/
Путевую скорость в полёте можно определить одним из следующих способов:
-по времени пролета известного расстояния;
-по высоте полета и времени пробега визирной точкой известного вертикального угла;
-двухкратным пеленгованием боковой визирной точки;
-при помощи ветрочета по известному ветру;
-при помощи навигационной линейки по известному ветру.
Для определения путевой скорости по времени пролета известного расстояния необходимо отметить время пролета каких-либо двух ориентиров. Измерив по карте расстояние между ними, легко определить путевую скорость по формуле
W = S / t.
При определении путевой скорости по высоте полета и времени пробега визирной точкой известного вертикального угла пройденный самолетом путь за время визирования будет равен высоте полета или определенной ее части. Обычно берут либо угол, равный 45°, при котором пройденный самолетом путь (база) равен высоте полета, либо угол, равный 26°,5, при котором база равна половине высоты.
Зная истинную высоту полета, легко вычислить путевую скорость по формуле
W = H*3600 / t,
где H — истинная высота полета в метрах;
t — время пролета базы в секундах.
Порядок определения путевой скорости по времени прохождения визирной точкой базы, равной половине высоты полета, с помощью счетного приспособления визира АБ-52 следующий:
ориентировать продольные линии сетки поля зрения визира по бегу земных ориентиров;
наблюдая через окуляр, определить по секундомеру время прохождения ориентиром базы визира;
на счетном приспособлении совместить деление, соответствующее найденному по секундомеру времени (в секундах), с делением, соответствующим истинной высоте полета в метрах, и против индекса “W км/час” прочесть путевую скорость.
Для определения путевой скорости двухкратным пеленгованием боковой визирной точки при курсовом угле 60° + УС с правого борта или 300° + УС с левого борта выбирают визирную точку на вертикальном угле не менее 60°. В момент прихода ее в центр пузырька пускают секундомер и останавливают его в момент вторичного прихода визирной точки на тот же вертикальный угол. Пройденное самолетом расстояние АВ будет равняться дистанции до ориентира в момент пуска или остановки секундомер. Дистанцию можно определить по высоте и вертикальному углу.

Зная пройденное самолетом расстояние между двумя визированиями боковой точки под равными вертикальными углами и время пролета его, легко на навигационной линейке определить путевую скорость. Данный способ применяется при полетах на большой высоте, ночью и при полетах над морем при видимости береговой черты.
В лётной практике необходимо уметь рассчитывать навигационные элементы в уме. Это позволяет не только быстро получать приближенные результаты, но и исключать грубые ошибки в инструментальных расчётах.
Путевую скорость можно подсчитать в уме следующими способами:
1.По расстоянию, пройденному за 1 минуту.
Пример. 5 = 88 км; / = 11 мин. Определить путевую скорость. Решение. Находим расстояние, пройденное ВС за 1 мин: =88: 11=8 км. Определяем путевую скорость: № = 8-60 = 480 км/ч.
2. Умножением пройденного расстояния на время полета, выраженное в долях часа. Этот способ применяют, если время полета в минутах кратно 60. При этом нужно знать, какую долю часа составляют 1, 2 и т. д. минуты:
Число минут … 1 2 3 4 5 6 10 12 15 20 30 Доля часа …. 1/60 1/30 1/20 1/15 1/12 1/10 1/6 1/5 1/4 1/3 1/2
Пример. 5 = 90 км; ( = 12 мии. Определить W.
Решение. 1. Находим, какую долю часа составляет пройденное время; 12 мин составляет 1/5 ч. 2. Определяем №=90-5 = 450 км/ч.
3. Учетом продольной составляющей ветра. В основу данного способа положено использование продольной составляющей ветра. Однако определить ее непосредственно экипаж не может. Но нетрудно найти боковую составляющую. Поэтому этот способ реализуется в тех случаях, когда на маршруте полета имеются изломы, близкие к 90°. Очевидно, что боковая составляющая, найденная перед ППМ, после разворота на 90° становится продольной и ею можно воспользоваться для определения W в данном направлении полета. Тогда W =V± Un. При этом влияние Un на W оценивают в зависимости от направления ее действия.
Пример. К„ = 420 км/ч; ЗМПУ, = 30°; УС= +5°; ЗМПУ2 = 120°. Определить W для ЗМПУо=120°.
Решение. 1. Находим коэффициент К= Кп/60 = 420/60 = 7.
2. Определяем боковую составляющую ветра: Uэ= К-УС = 7-5 = 35 км/ч.
3. Рассчитываем W. Из условий примера видно, что Uэ действует в левый борт ВС. Следовательно, при полете с ЗМПУ=120°С„ будет попутной. Поэтому W = V«+Uэ = 420 + 35 = 455 км/ч.
5. Определение ветра в полёте
Одним из основных метеорологических элементов, учитываемых в самолетовождении, является ветер. Он оказывает существенное влияние на ВС как в полете, так и при взлете и посадке. От направления и скорости ветра зависят безопасность взлета и посадки, длина разбега и пробега ВС, время полета по маршруту и расход топлива.
Для определения направления и скорости ветра в полёте необходимо:
1.Определить фактический путевой угол/ФМПУ/
2.Измерить угол сноса фактический/УСф/ и путевую скорость/W/
С целью вывода расчётных формул рассмотрим НТС.
Из приведённого рисунка следует:
1. δн=ФМПУ+/±α/ δ=ФМПУ+ /±α/ ±180ۨ
где α-угол заключённый между продолжением вектора /U/ и ЛФП.
2.Из точки /А/ НТС опустим перпендикуляр /h/ и получим два треугольника 1 и 2. 3.Из треугольника 1 имеем:
h=V×sinУСф
Из треугольника 2 имеем: tgα=h÷ΔU где ΔU=W-Vu→=Uэ-эквивалентный ветер. Uэ-это условный ветер, направление которого всегда совпадает с направлением ЛЗП и создаёт такую же путевую скорость как фактический ветер.
4.Перепишем полученное выражение в виде:
Vu×sinУСф÷ΔU×tgα или tgα÷Vu=sinУСф÷ΔU
5.Полученное уравнение решим с помощью НЛ-10
α-измеряется от 0ۨ до 90ۨ и имеет тот же знак что и УСф.
6.Скорость ветра определим из соотношений:
h=Vu×sinУСф и h=U×sinα отсюда: sinУСф÷U=sinα÷Vu
Это уравнение решим на НЛ-10.
7.Для определения метеорологического направления ветра используем формулу:
а) δ=ФМПУ+/±α/±180ۨ
эта формула используется при попутно-боковом ветре /W>Vu/
б) при встречно-боковом ветре /W<Vu/используется формула:
δ=ФМПУ-/±α/
Пример. Дано:ФМПУ=50, УСф=-6, W=200км/ч, Vu=180км/ч
Решение:1.определяем ΔU. ΔU=W-Vu=200-180=+20км/ч (знак + показывает на то ,что ветер попутно-боковой, /-/-встречно-боковой)
2. На НЛ-10 определяем α и U
3. δ=ФМПУ+/±α/±180ۨ ветер попутно-боковой δ=50ۨ+/-43ۨ/±180ۨ=187ۨ
В курсовой работе были рассмотрены способы определения навигационных элементов в полёте. Мы смогли увидеть важность и необходимость реализации данной задачи для успешного и точного самолётовождения. Проследили зависимость угла сноса и путевой скорости от изменения скорости и направления ветра. В работе мы пришли к выводу, что в полёте, для точного и безопасного самолётовождения, необходимо строго выдерживать заданную траекторию полёта. В течении всего полёта знать текущее местоположение ВС. Осуществлять контроль, и при необходимости, исправление пути и в комплексе использовать все средства самолётовождения.
Гражданская авиация вступила в такой этап своего развития, который предъявляет особые требования к профессиональной подготовке авиационных специалистов, но какой бы совершенной не была техника, она даст отдачу только тогда, когда экипаж будет уметь грамотно и эффективно её эксплуатировать в полёте. А это невозможно сделать без знаний специальных дисциплин, в том числе без умения пилота вести расчёт навигационных элементов в полёте, чтобы знать и предвидеть развитие ситуации во «враждебной» для человека среде. Эти знания закладываются в лётных училищах и должны совершенствоваться на протяжении всей деятельности пилота и являться основой регулярности, экономической целесообразности и главное безопасности использования воздушного транспорта.
элемент навигация угол скорость снос
1. Чёрный М.А., Кораблин В.И. Воздушная навигация, М., Транспорт, 1991 г.
2. Белкин А.М. Миронов Ю.И. Воздушная навигация: справочник, М., Транспорт, 1988 г.
3. ФАП РФ, 2009 г.
4. Конспект лекций по воздушной навигации
В данной статье описывается расчет угла бокового сноса ветром в зависимости от скорости и направления ветра, вводится понятие навигационного треугольника скоростей.
Термины и определения
 Истинная (воздушная) скорость – это скорость движения воздушного судна относительно воздушной массы, в которой проходит полет.
Истинная (воздушная) скорость – это скорость движения воздушного судна относительно воздушной массы, в которой проходит полет.
Путевая скорость – скорость воздушного судна относительно земли.
Магнитный курс (МК, heading) – это угол, заключенный между северным направлением меридиана, принятого за начало отсчета и продольной осью воздушного судна.
Магнитный путевой угол (МПУ, track) – это угол, заключенный между северным направлением меридиана, принятого за начало отсчета, и линией пути.
Навигационный ветер (НВ) – угол между северным направлением меридиана, принятого за начало отсчета и направлением, куда дует ветер.
Метеорологический ветер – угол между северным направлением меридиана, принятого за начало отсчета и направлением, откуда дует ветер.
Угол сноса (УС) – угол, заключенный между продольной осью самолета и линией пути. Отсчитывается от продольной оси самолета до линии пути вправо со знаком плюс и влево со знаком минус.
Курсовой угол ветра (КУВ) – угол, заключенный между линией пути (фактической или заданной) и направлением навигационного ветра. Отсчитывается от линии пути до направления ветра по ходу часовой стрелки от 0 до 360°.
Навигационный треугольник скоростей
α – угол сноса
βф – МПУ
δн – навигационный ветер
ε – курсовой угол ветра
γ – магнитный курс
V – воздушная скорость
W – путевая скорость
U – скорость ветра
Самолет относительно воздушной массы перемещается с воздушной скоростью в направлении своей продольной оси. Одновременно под действием ветра он перемещается вместе с воздушной массой в направлении и со скоростью ее движения. В результате движение самолета относительно земной поверхности будет происходить по равнодействующей, построенной на слагаемых скоростях самолета и ветра. Таким образом, при полете с боковым ветром векторы воздушной скорости, путевой скорости и скорости ветра образуют треугольник, который называется навигационным треугольником скоростей. Каждый вектор характеризуется направлением и величиной.
Расчеты
Между элементами навигационного треугольника скоростей существует следующая зависимость:
γ = β – (±α)
β = γ + (±α)
α = β – γ
W = V(соs(α)) + U(соs(ε))
ε = δм ± 180° – β
δм = β + ε ± 180°
При расчетах необходимо учитывать, что все величины необходимо привести к единому измерению. Например, скорости ветра и истинную воздушную скорость необходимо выразить в в узлах или метрах в секунду.
Расчет в уме
Для простоты расчета используется методика максимального угла сноса. Для этого рассчитывается максимальный возможный угол сноса для текущего ветра, а потом вносится поправка на угол ветра.
Максимальный угол сноса равен:
αmax ≈ (60 * U) / V
Максимальный угол сноса – это такой УС, при котором ветер был бы строго боковой (90 градусов относительно магнитного курса).
Пример: скорость ветра 15 узлов, истинная воздушная скорость 450 узлов. По формуле находим:
(60*15)/450=2
2 градуса – максимальный угол сноса.
Если ветер не строго боковой, то полученный результат умножаем на коэффициент, зависящий от курсового угла ветра (КУВ), равный синусу КУВ:
| КУВ | Коэффициент |
|---|---|
| 60° | 0,8 |
| 45° | 0,7 |
| 30° | 0,5 |
| 0 | 0° |
Примечания:
- Знак для значения угла сноса определяется исходя из направления ветра. Если ветер дует в правый борт, то знак “минус”, если в левый – “плюс”.
- Для следования по ЛЗП необходимо внести поправку в курс, равную УС, но противоположную по знаку
- Скорости U и V должны быть в одной размерности
- Приборная скорость не равна истинной
- М/с, для расчётов в уме, можно переводить в узлы простым умножением на 2
Пример:
Найти угол сноса, если МПУ 130°, навигационный ветер на данной высоте 190°, 7м/с. Истинная скорость 220 узлов.
Решение:
1) Приводим значения к единой системе счисления:
МПУ=130°;
Ветер 190°;
Скорость ветра 7 м/с = 14 узлов;
Vист = 220 узлов.
2) Находим курсовой угол ветра:
КУВ=НВ-МПУ=190°-130°=60°
3) Находим максимальный угол сноса:
УСmax=(60*14)/220=4°
4) Определяем коэффициент:
К=sin(КУВ)=sin(60°)=0,8
5) Получаем угол сноса
УС=УСmax*K=(+)4°*0,8=3°
Ответ: для поправки на ветер необходимо взять 3 градуса влево. МК=127°.
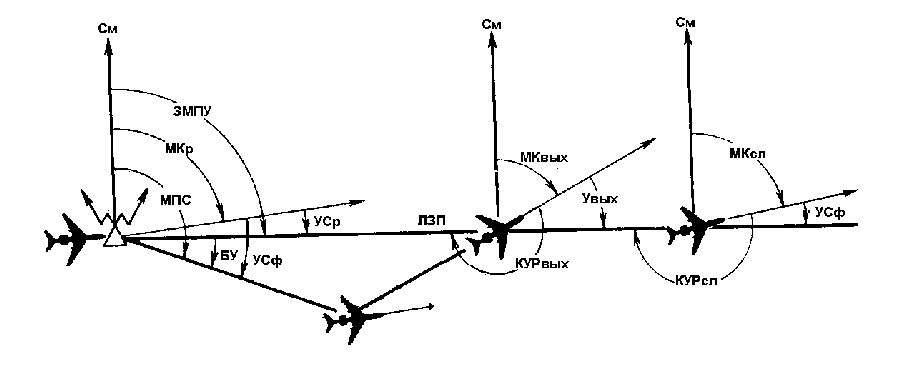
Исправление пути по направлению
Исправление
пути внесением поправки в курс. Сущность
способа заключается в определении
такого нового курса полета, который
обеспечивает выход ВС на КО или очередной
ППМ. Исправление пути выполняют в
следующем порядке :
1.
Определяют знак и величину БУ. Боковым
уклонением называется угол, заключенный
между линией заданного пути и линией
фактического пути.
 БУ
БУ
отсчитывают от ЛЗП к ЛФП вправо со знаком
(+) и влево со знаком (–). Его определяют
сравнением ФМПУ и ЗМПУ : БУ = ФМПУ –
ЗМПУ.
Рассчитывают
по ЛБУ и пройденному расстоянию на
НЛ-10.
Если
исправить курс только на значение БУ°,
то воздушное судно будет перемещаться
параллельно линии заданного пути. .
Чтобы
выйти на КО(ППМ) необходимо развернуть
ВС еще и на дополнительную
поправку
(ДП).
2.
Находим ДП :
В
самолетовождении принято брать ДП с
таким же знаком, что и БУ°.
3.
Определяем поправку в курс : ПК = БУ +
ДП.
Поправка
в курс берется с таким же знаком, что и
знак бокового уклонения. При ее учете
исходят из того, что при уклонении вправо
МК надо уменьшить, а при уклонении влево
увеличить на ПК.
4.
Находят исправленный курс выхода на
очередной КО :
МК
испр. = МК р – ( ±
ПК )
5.
После выхода на КО берут курс следования
для полета ЛЗП.
МК
сл. = ЗМПУ – ( ±
УС ф.)
Исправление
пути внесением ПК можно производить
при значении этой поправки не превышающем
30°,
т.е. когда можно принебречь изменением
УС на новом направлении полета.
Определение
БУ, ДП и ПК подсчетом в уме.
БУ
можно определить, руководствуясь тем,
что 1 км ЛБУ соответствует 2°
БУ, если Sпр = 25-30 км; 1°
БУ ели Sпр = 50-60 км; 0,5°
БУ если Sпр = 100-120 км.
В
практике используют расчет БУ и ДП по
ЛБУ :![]()
ЛБУ
ЛБУ
 tgБУ
tgБУ
= Sпр и tg ДП = Sост.
Полагая тангенс малых углов равным
самому
ЛБУ
 углу,
углу,
выраженному в радианах, получим: БУ°=
Sпр. ·
57,3 °

ЛБУ
ДП°=
Sост. ·
57,3°
Для
упрощения расчетов применяют следующие
формулы:
ЛБУ
ЛБУ

 БУ°=
БУ°=
Sпр ·
60°
и ДП°=
Sост. ·
60°
И
окончательно: ПК=БУ+ДП.
ПК
можно рассчитать в зависимости от БУ°,
Sпр и Sост.
Если
Sпр= Sост то ПК °=
2 БУ °;
Если Sпр в 2 раза больше Sост, то ПК°=
3 БУ°;
Если
Sпр в 2 раза меньше Sост, то ПК°=
1,5БУ°.
Исправление
пути по дальности
а)
Маневрирование
скоростью для выхода на цель в заданное
время
Сущность
данного способа заключается в том, что
по оставшемуся времени полета (tост) и
оставшемуся расстоянию (S ост) определяется
потребная путевая скорости (Wпотр). Затем
рассчитывается разность между потребной
и фактической путевыми скоростями (DW).
DW=Wпотр
— Wф
Изменение
W практически равно изменению воздушной
скорости. Поэтому изменяют воздушную
скорость полета на величину DW,
т.е.
Vпотр=Vф+(±DW)
В
ВТА при выполнении боевых задач
маневрирование скоростью может быть
ограничено тактическими или боевыми
условиями. Поэтому экипаж заранее
рассчитывает минимальную длину участка
маневрирования для погашения возможного
избытка (нагона недостатка) времени.
Sмин=
![]()
где
V1
— фактическая воздушная скорость;
V2
— возможная максимальная (минимальная)
воздушная скорость;
Dt—
возможный дефицит времени.
На
карте на удалении от цели (заданного
рубежа), равном рассчитанному минимальному
расстоянию S мин, увеличенному на 10-20 %,
намечается рубеж (КО) начала маневра
скоростью. Для всех возможных вариантов
прохода рубежа через 30сек или 1 мин в
сторону опоздания или раннего выхода
рассчитываются Wпотр. Значения их
сводятся в таблицу, которая наносится
на карту у рубежа начала маневра



+
![]()
КО
-
Тф
16.38
16.39
16.40
16.41
16.42
16.43
Wпотр
545
570
600
630
670
710
Dt
+2
+1
0
-1м
-2.0м
-3.0
На
контрольном этапе до начала маневрирования
определяется фактическая путевая
скорость (Wф). По времени прохода начала
участка маневрирования из таблицы
выбирается потребная путевая скорость
(Wпотр) и рассчитывается разность DW
DW=Wпотр-
Wф.
На
рассчитанную величину изменяется
воздушная скорость полета Vпотр=Vф+(±
DW
) . Эта скорость выдерживается до рубежа
окончания маневра.
б)
Если
время маневра или его расстояние
неограничены
и имеется большой запас диапазона
скоростей, то поступают следующим
образом:
Экипаж
изменяет скорость на какую-то величину
DV
и по НЛ-10 определяет tманевра
в зависимости от величины ошибки в
выходе на цель:
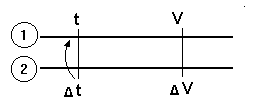
где Vзад
— истинная скорость, которая выдерживалась
до начала маневрирования;
Dt
— избыток или недостаток времени;
DV
— величина изменения скорости.
tман
— время, в течении которого выдерживается
скорость увеличения (уменьшения) на DV.
Если
задано время маневрирования, то поэтому
же ключу определяется DV.
Внимание!
Эти ключи не учитывают время на разгон
и торможение.
в)
Для выхода на цель может применяться
способ изменения длины маршрута
г)
Способы
погашения времени для выхода на цель в
заданное время
Наибольшее
применение из этих способов нашел способ
отворота от маршрута на 60°.
Порядок
действия экипажа:
у КО определяется избыток времени для
выхода на цель в tзад, затем определяется
время t1
по
формуле:
t1=
Dt
0,11·t360
Командир
экипажа отворачивает от ЛЗП на угол
60°.
После окончания отворота включается
секундомер и экипаж следует с новым
курсом в течение времени t1;
по истечении этого времени, выполняется
разворот в сторону ЛЗП на угол 120°.
После занятия нового курса вновь
включается секундомер и экипаж следует
с этим курсом в течение времени t1
;
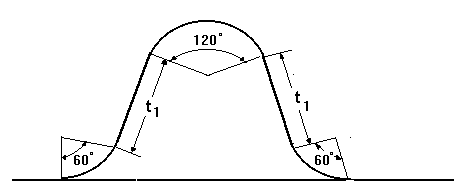 По
По
истечении времени t1
экипаж занимает курс, с которым он
следовал по ЛЗП. Схема маневра показана
на рисунке.
д)
Для погашения избытка времени могут
применяться: отворот на 45°,
90°;
вираж с заданным креном.
Применение
угломерных радиотехнических средств
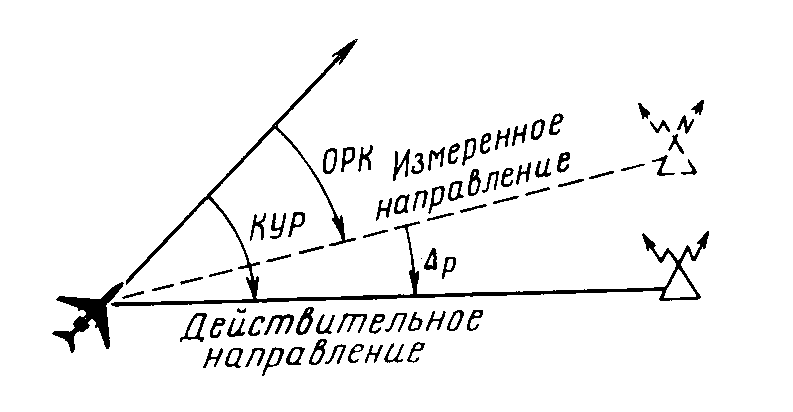
Основными
элементами пеленгации при использовании
радиокомпаса являются: курсовой угол
радиостанции (КУР); отсчет радиокомпаса
(ОРК); радиодевиация ( Dр);
пеленг радиостанции (ПР); пеленг самолета
(ПС).
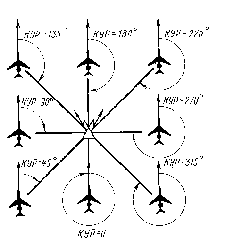
Курсовой
угол радиостанции — угол, заключенный
между продольной осью самолета и
действительным направлением на
радиостанцию. Его отсчитывают от
продольной оси самолета по ходу часовой
стрелки до направления на радиостанцию
от 0 до 360°.
Отсчет
радиокомпаса — угол, заключенный между
продольной осью самолета и измеренным
направлением на радиостанцию, которое
показывает радиокомпас. Его отсчитывают
от продольной оси до измеренного с
помощью радиокомпаса направления на
радиостанцию от 0 до 360°.
В общем случае отсчет радиокомпаса
(ОРК) отличается от действительного
направления на радиостанцию на величину
(Dр),
которая называется радиодевиацией.
Между
КУР, ОРК и Dр
существует
следующая зависимость:
КУР
= ОРК + ( ±Dр
);
ОРК = КУР — ( ±Dр
);
Dр
=
КУР — ОРК.
Пеленг
радиостанции
— угол, заключенный между северным
направлением меридиана, проходящего
через ВС, и ортодромическим (действительным)
направлением на радиостанцию. Его
отсчитывают от северного направления
меридиана по ходу часовой стрелки до
направления на радиостанцию от 0 до
360°.
Пеленг называется магнитным, если он
отсчитывается от магнитного меридиана,
и истинным, если от истинного меридиана.
Пеленги
радиостанции определяют по формулам:
МПР
= МК + КУР; ИПР = ИК + КУР;
ИПР
= МК + ( ±Dм)
+ КУР;
ИПР
= МПР + ( ±Dм);
При
КУР = 0 магнитный пеленг радиостанции
МПР = МК.
Внимание!
При решении многих практических задач
необходимо помнить, что между курсом и
курсовым углом радиостанции существует
обратная зависимость, т.е. на сколько
градусов увеличивается МК, на столько
же градусов уменьшается КУР и наоборот.
Пеленг
ВС
— угол, заключенный между северным
направлением меридиана, проходящего
через радиостанцию и ортодромическим
направлением на В.С. Его отсчитывают от
северного направления меридиана по
ходу часовой стрелки от 0 до 360°.
Пеленг называется истинным, если отсчет
ведется от истинного меридиана и
магнитным, если отсчет ведется от
магнитного меридиана.
Пеленги
ВС рассчитывают по формулам:
МПС
= МПР ±
180°;
МПС = МК + КУР ±
180°;
ИПС
= ИК + КУР ±
180°;
ИПС = МК + ( ±Dм)
+ КУР ±
180°;
ИПС
= ИПР ±
180°;
При КУР = 180°
МПС = М
Указанные
формулы для расчета ИПС используют,
если разность между долготой радиостанции
и долготой ВС менее 2°,
если она более 2°,
то при расчете ИПС необходимо учитывать
поправку на угол схождения меридианов.
s
= ( lр
— lс)·
sinjср,
где
lр
—долгота
радиостанции, lс
— долгота самолета; jср
— средняя широта листа карты.
Поправку
учитывают по следующим правилам: если
радиостанция расположена восточнее
ВС, то поправку берут со знаком (+) и
наоборот. Это правило справедливо для
Северного полушария. В Южном полушарии
знак поправки противоположен.
Для
прокладки на карте:
ИПС
= МК + КУР ±
180°
+ (±
s
).
Полет
от радиостанции
а)
Контроль
пути по направлению при полете от
радиостанции
Его
выполняют сравнением МПС с ЗМПУ. В
результате определяют боковое уклонение
(БУ). Если МПС = ЗМПУ или отличается не
более, чем на 2°,
то ВС находится на ЛЗП, если МПС больше
ЗМПУ, то ВС находится правее ЛЗП, а если
меньше — левее.
Боковое
уклонение и фактический угол сноса
определяются по формулам:
БУ
= МПС — ЗМПУ; УСср=
МПС — МК; УСср
= КУР — 180°
.
Если
после прохода ОПРС экипаж занимает курс
= ЗМПУ, то УСср=
БУ.
б)
Полет
от радиостанции с выходом на ЛЗП
 Этот
Этот
способ полета применяют при значительном
отключении ВС от ЛЗП. Порядок выполнения
полета следующий: точно проходят
радиостанцию с МКр;
через 5 — 15 минут полета отсчитывают
КУР и рассчитывают МПС = МК + КУР ±
180°
, определяют сторону и значение бокового
уклонения БУ = МПС — ЗМПУ; УСср.
= КУР — 180°
; задаются углом выхода (20 — 90°),
рассчитывают МКвых
= ЗМПУ±
Увых
(«+» при левом уклонении, «-»
при правом уклонении); определяют момент
выхода ВС на ЛЗП по КУРвых
= 180 ±
Увых
(«+»
при правом уклонении, «-» при левом
уклонении)
После
выхода на ЛЗП устанавливают ВС на МКсл
= МКр
— (±БУ)
или МКсл
=
ЗМПУ — ( ±УСср);
при полете по ЛЗП ведут контроль пути
по направлению по КУР
СЛ
или
МПСсл
МПСсл
: КУРсл
= 180°+
( ±УСср);
МПСсл
= ЗМПУ.
в)
Полет
от радиостанции с выходом на ППМ
Его
используют, когда уклонение ВС от ЛЗП
или оставшееся расстояние до ППМ малы.
Полет выполняют в такой последовательности:
точно проходят радиостанцию с МКр;
через 5 — 15 минут полета отсчитывают КУР
и определяют МПС = МК + КУР ±180°.
Сравнивая МПС с ЗМПУ, находим сторону
и величину БУ = МПС — ЗМПУ; УСср
= МПС — МК или УСср
= КУР — 180°;
по пройденному и оставшемуся расстоянию
определяют:
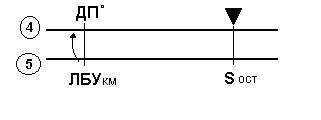
ДП
= (Sпр
: Sост)·
БУ; ПК = БУ + ДП;
 Решают
Решают
эту формулу на НЛ — 10
Определяют
курс следования на ППМ:
МКсл
ппм
= МКр
— ( ±
ПК)
Порядок
выполнения полета показан на рисунке.
 г)
г)
Полет
по внутреннему створу радиостанций
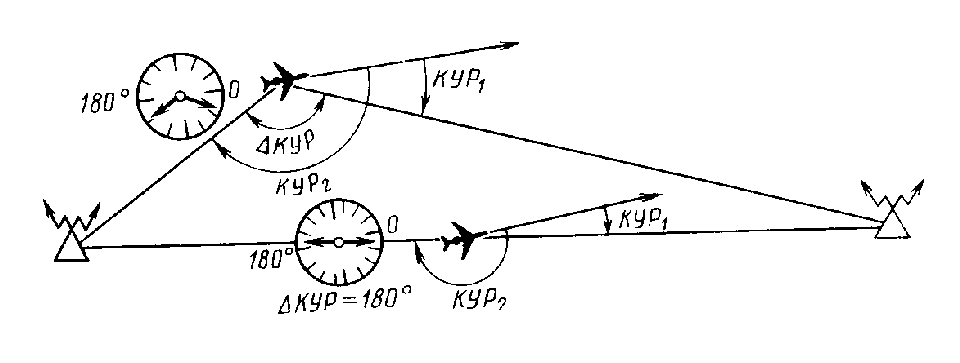 Этот
Этот
способ применяется, когда на ЛЗП имеются
две радиостанции, одна впереди ВС, а
вторая позади и при наличии на борту
двухстрелочного указателя КУР. Очень
часто используется при полетах по ВТ.
Порядок
выполнения полета следующий: настраивают
один АРК на ОПРС, расположенную впереди
ВС, а другой на пройденную, подбирают
такой курс, чтобы обе стрелки АРК
образовали прямую линию. В этом случае
DКУР
= КУР2
— КУР1
= 180°,
что соответствует нахождению ВС на
линии створа. Образование между стрелками
угла, не равного 180°,
означает уклонение ВС от ЛЗП. При этом
считают, что линия створа проходит через
концы стрелок указателя. Сторону
уклонения ВС указывает вершина тупого
угла, образованного стрелками.
После
подбора курса следования пилотирование
ВС осуществляется по курсовому прибору
с периодическим контролем по стрелкам
АРК.
Этот
способ позволяет замечать даже небольшие
уклонения от ЛЗП и быстро их исправлять
доворотом в сторону, противоположную
вершине тупого угла, добиваясь прямой
линии стрелок указателя АРК.
д)
Способы
полета на радиостанцию.
Различают 3 способа полета на радиостанцию:
пассивный, активный и курсовой. Пассивный
полет
— когда летчик выдерживает во время
полета КУР = 0. Полет выполняется по
радиодромии.
Активный полет
— летчик удерживает стрелку АРК с учетом
УС. При отрицательном угле сноса стрелка
АРК удерживается на значении 360°-
IУС °I
; при положительном УС стрелка АРК
удерживается на значении УС°.
Курсовой
способ
— применяется при неустойчивой работе
приводной радиостанции, или в боевых
условиях, когда приводная радиостанция
будет работать не постоянно. Летчик
занимает направление на ОПРС на КУР =
0. Запоминает курс на р/станцию и
выдерживает его в течение некоторого
времени (3-5 мин). При возобновлении
работы р/станции летчик доворачивает
самолет на КУР=0 и снова запоминает курс
на радиостанцию и т.д.
Самый
короткий путь, проходимый самолетом,
будет при полете активным способом
(полет по ортодромии). Самый длинный
путь — при полете курсовым способом.
Применение
системы РСБН — 2.
Дальность
действия системы определяется по
формуле: Д = К(Öhотн
+ ÖHотн
),
где
hотн
= hабс
+ hм
— hпр
; Hотн
=
Hабс
—
hпр
hм
=
высота мачты антенны;
hпр
— высота препятствия.
Значения
К = 3,7 над сушей; К = 4,1 — над морем.
Точность
определения МС :

 sr
sr
= Ö
(0,017 sа·
Д)2
+ sд2
; sа=
0,25°;
sд
=
0,2 км.
С
учетом погрешностей графической работы
на карте суммарная ошибка в определении
МС:
-
Д
км50
100
150
200
250
300
350
400
sr
км1,04
1,1
1,2
1,37
1,49
1,64
1,8
2
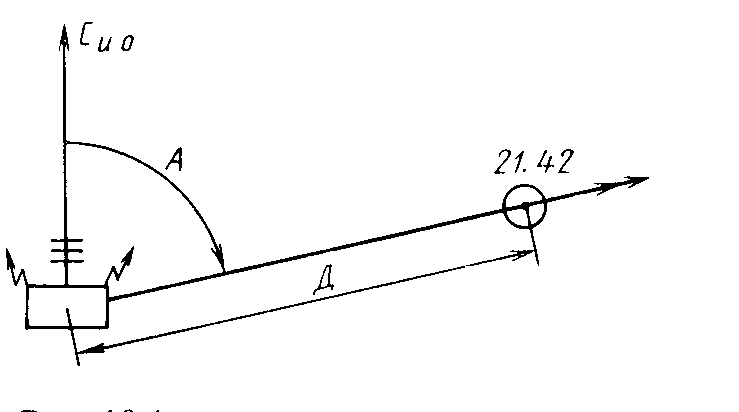
а)
Определение МС. МС получается путем
пересечения 2-х линий положения: линии
азимута и линии равных расстояний.
1.
Снять со счетчика показания А и Д.
2.
Зафиксировать время.
3.
Отложить на карте значения А и Д от точки
стояния наземного маяка РСБН.
Внимание!
Со счетчика снимается
Аист.
б)
Полет
по прямолинейному маршруту проходящему
через маяк РСБН.
1.
На ЩУ установить режим работы «Азимут
на» или «Азимут от», в зависимости
от того выполняется полет на радиомаяк
или от него.
2.
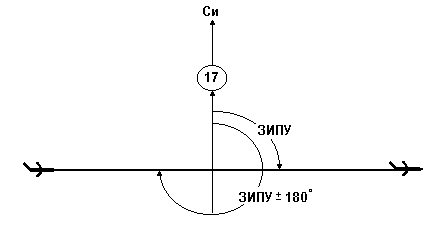
Ручкой «Азимут» установить ЗИПУ
при полете от маяка или ЗИПУ ±
180°
при полете на маяк.
3.
Выключатель «Посадка» у пилота в
положение «Выкл».
 4.
4.
На КПП ручкой «Курс» установить
против Ñ
ЗПУ в той системе отсчета, в которой на
КПП выдается курс Л.А.
5.
Ручкой «Орбита» установить дальность
до КО.
6.
Пилотировать по вертикальной планке
КПП.
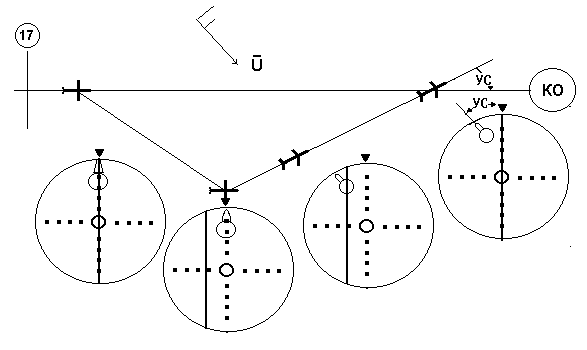
Внимание!
Если стрелка КПП находится в центре
кружка, то самолет находится на ЛЗП,
если планка на краю кружка — 1км от ЛЗП;
1 точка — 2 км, 2 точка — 3 км, 3 точка — 4 км,
4 точка — 7 км. Если стрелка зашкаливает,
то удаление от ЛЗП более 10 км.
При
выполнении полета, самолет под воздействием
ветра уклоняется от ЛЗП. Для того, чтобы
обеспечить плавный выход на ЛЗП, летчик
должен сочетать показание вертикальной
стрелки и стрелки курса прибора КПП.
Так как курсовую шкалу КПП всегда
выставляют на значение ЗПУ, то в процессе
разворота стрелка ( петелька) курса
относительно неподвижного треугольного
индекса будет показывать угол подхода
к ЛЗП. При приближении ВС к ЛЗП вертикальная
стрелка начнет постепенно двигаться к
центру шкалы. С этого момента летчик,
изменяя крен, совмещает кружок стрелки
курса с верхним концом вертикальной
стрелки и в дальнейшем удерживает
стрелки совмещенными. При этом угол
подхода все время будет уменьшаться и
самолет плавно выйдет на ЛЗП. После
выхода на ЛЗП занимается курс с учетом
УС. В этом случае вертикальная планка
находится в центре прибора, а петелька
курса относительно треугольного индекса
должна показывать значение УС.
|
 состоит из основания, ударника, замка и паруса. Основание— сосновая рейка длиной 150 мм и сечением 10X8 мм На одном ее конце нитками с клеем привязывают скользящую петлю из скрепки и замок — П-образную пластину из алюминия шириной 8 мм. На другом конце рейки закрепляют вторую петлю. Один конец ударника, изготовленного из стальной проволоки диаметром 1,5 м .
состоит из основания, ударника, замка и паруса. Основание— сосновая рейка длиной 150 мм и сечением 10X8 мм На одном ее конце нитками с клеем привязывают скользящую петлю из скрепки и замок — П-образную пластину из алюминия шириной 8 мм. На другом конце рейки закрепляют вторую петлю. Один конец ударника, изготовленного из стальной проволоки диаметром 1,5 м .
|
||||
|