Во многих задачах интерес представлю не только перемещения материальных точек в пространстве, но и траектории их движения.
Линию, которую описывает частица при своем движении, называется траекторией движения.
Форма траектории зависит от выбора системы отсчета. В разных системах отсчета траектории могут быть представлены разными линиями, могут быть прямыми и кривыми.
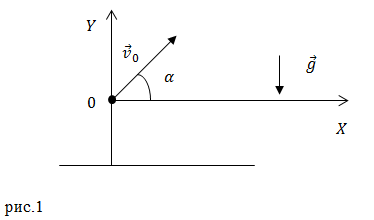
Рассмотрим свободное движение тела около поверхности Земли. Начало координат разместим в точке бросания тела (рис.1). Оси координат направим так, как изображено на рис.1.
Тогда уравнение движения тела (1) в проекциях на координатные оси декартовой системы координат принимает вид системы из двух уравнений:
Для того чтобы получить уравнение траектории движения тела ($y=y(x)$) следует исключить время движения тела из уравнений (2) и (3). Выразим из уравнения (2) $t$ и подставим его в выражение (3), получим:
Выражение (4) это уравнение параболы, проходящей через начало координат. Ее верви направлены вниз, так как коэффициент при $x^2$ меньше нуля.
Найти координаты вершины траектории можно при помощи известных правил исследования функций на экстремум. Так, положение максимума функции $y(x)$ определяют, приравнивая к нулю первую производную ($frac$) от нее по $x$.
Из представления о траектории можно конкретизировать смысл обратимости механического движения.
Пусть частица движется в силовом поле таком, что ее ускорение в любой точке обладает определенной величиной, не зависящей от скорости. Как будет двигаться эта частица, если, в какой то точке ее траектории направление скорости заменить противоположным? С точки зрения математики это эквивалентно замене $t $ на $-t$ для всех уравнений. Уравнение траектории время не содержит, получается, что частица будет перемещаться «вспять» по той же самой траектории. При этом отрезки времени между любыми точками траектории будут одинаковы при прямом и обратном движении. Всякой точке траектории ставится в соответствие определенное значение величины скорости независимо от направления движения по данной траектории. Данные свойства наглядны в колебательных движениях маятника.
Все сказанное выше справедливо тогда, когда можно пренебречь любым сопротивлением движению. Обратимость движения существует, когда выполняется закон сохранения механической энергии.
Положение точек системы отсчета можно определять при помощи разных способов. В соответствии с этими способами описывают и движение точки или тела:
Путь — это скалярная величина, равная длине траектории.
Если траектория задана, то задачу описания движения сводят к определению закона движения вдоль нее. При этом выбирается начальная точка траектории. Любая другая точка характеризуется расстоянием $s$ по траектории от начальной точки. В таком случае движение описывают выражением:
Пусть по окружности радиуса R равномерно перемещается точка. Закон движения точки по окружности в рассматриваемом методе запишем как:
где $s$ — путь точки по траектории; $t$ — время движения; $A$ — коэффициент пропорциональности. Известными являются окружность и точка начала движения. Отсчет положительных величин $s$ совпадает с направлением перемещения точки по траектории.
Знание траектории движения тела во многих случаях существенно упрощает процесс описания движения тела.
Задание: Точка движется в плоскости XOY из начала координат со скоростью $overline=Aoverline+Bxoverline , $где $overline$, $overline$ — орты осей X и Y; $A$,B — постоянные величины. Запишите уравнение траектории движения точки ($y(x)$). Изобразите траекторию. textit<>
Решение: Рассмотрим уравнение изменения скорости частицы:
Из этого уравнения следует, что:
Для получения уравнения траектории следует решить дифференциальное уравнение (1.3):
Мы получили уравнение параболы, ветви которой направлены вверх. Эта парабола проходит через начало координат. Минимум этой функции находится в точке с координатами:
Задание: Движение материальной точки в плоскости описывает система уравнений: $left< begin x=At. \ y=At(1+Bt) end right.$, где $A$ и $B$ — положительные постоянные. Запишите уравнение траектории точки.
Решение: Рассмотрим систему уравнений, которая задана в условии задачи:
Исключим время из уравнений системы. Для этого из первого уравнения системы выразим время, получим:
Подставим вместо $t$ правую (2.2) часть во второе уравнение системы (2.1), имеем:
Движение заряженной частицы в магнитном поле: формулы. Движение заряженных частиц в однородном магнитном поле
Как известно, электрическое поле принято характеризовать величиной силы, с которой оно действует на пробный единичный электрический заряд. Магнитное поле традиционно характеризуют силой, с которой оно действует на проводник с «единичным» током. Однако при его протекании происходит упорядоченное движение заряженных частиц в магнитном поле. Поэтому мы можем определить магнитное поле B в какой-то точке пространства с точки зрения магнитной силы FB, которую поле оказывает на частицу при ее движении в нем со скоростью v.
Общие свойства магнитной силы
Эксперименты, в которых наблюдалось движение заряженных частиц в магнитном поле, дают такие результаты:
- Величина FB магнитной силы, действующей на частицу пропорциональна заряду q и скорости v частицы.
- Если движение заряженной частицы в магнитном поле происходит параллельно вектору этого поля, то сила, действующая на нее, равна нулю.
- Когда вектор скорости частицы составляет любой Угол θ ≠ 0 с магнитным полем, то сила действует в направлении, перпендикулярном к v и B; то есть, FB перпендикулярна плоскости, образованной v и B (см.рис. ниже).
- Величина и направление FB зависит от скорости частицы и от величины и направления магнитного поля B.
- Направление силы, действующей на положительный заряд, противоположно направлению такой же силы, действующей на отрицательный заряд, движущийся в ту же сторону.
- Величина магнитной силы, действующей на движущуюся частицу, пропорциональна sinθ угла θ между векторами v и B.
Сила Лоренца
Мы можем суммировать вышеперечисленные наблюдения путем записи магнитной силы в виде FB = qv х B.
Когда происходит движение заряженной частицы в магнитном поле, сила Лоренца FB при положительном q направлена вдоль векторного произведения v x B. Оно по определению перпендикулярно как v, так и B. Считаем это уравнение рабочим определением магнитного поля в некоторой точке в пространстве. То есть оно определяется в терминах силы, действующей на частицу при ее движении. Таким образом, движение заряженной частицы в магнитном поле кратко можно определить как перемещение под действием этой силы.
Заряд, движущийся со скоростью v в присутствии как электрического поля E, так и магнитного B, испытывает действие как электрической силы qE, так и магнитной qv х В. Полное приложенное к нему воздействие равно FЛ = qE + qv х В. Его принято называть так: полная сила Лоренца.
Движение заряженных частиц в однородном магнитном поле
Рассмотрим теперь частный случай положительно заряженной частицы, движущейся в однородном поле, с начальным вектором скорости, перпендикулярным ему. Предположим, что вектор B поля направлен за страницу. Рисунок ниже показывает, что частица движется по кругу в плоскости, перпендикулярной к B.
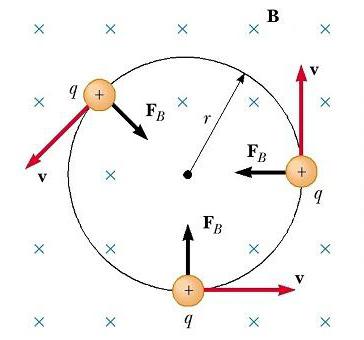
Движение заряженной частицы в магнитном поле по окружности происходит потому, что магнитная сила FB направлена под прямым углом к v и B и имеет постоянную величину qvB. Поскольку сила отклоняет частицы, направления v и FB изменяются непрерывно, как показано на рисунке. Так как FB всегда направлена к центру окружности, она изменяет только направление v, а не ее величину. Как показано на рисунке, движение положительно заряженной частицы в магнитном поле происходит против часовой стрелки. Если q будет отрицательным, то вращение произойдет по часовой стрелке.
Динамика кругового движения частицы
Какие же параметры характеризуют вышеописанное движение заряженной частицы в магнитном поле? Формулы для их определения мы можем получить, если возьмем предыдущее уравнение и приравняем FB центробежной силе, требуемой для сохранения круговой траектории движения:
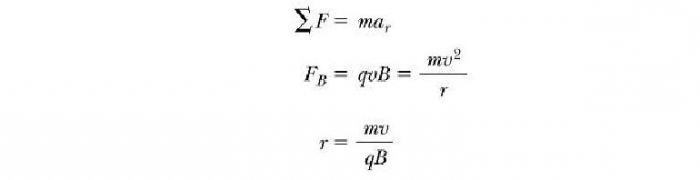
То есть радиус окружности пропорционален импульсу mv частицы и обратно пропорционален величине ее заряда и величине магнитного поля. Угловая скорость частицы

Период, с которым происходит движение заряженной частицы в магнитном поле по кругу, равен длине окружности, разделенной на ее линейную скорость:

Эти результаты показывают, что угловая скорость частицы и период кругового движения не зависит от линейной скорости или от радиуса орбиты. Угловую скорость ω часто называют циклотронной частотой (круговой), потому что заряженные частицы циркулируют с ней в типе ускорителя под названием циклотрон.
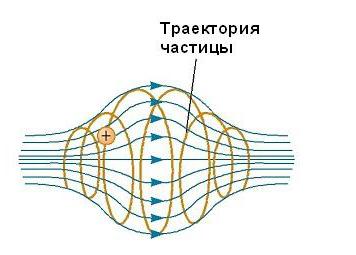
Движение частицы под углом к вектору магнитного поля
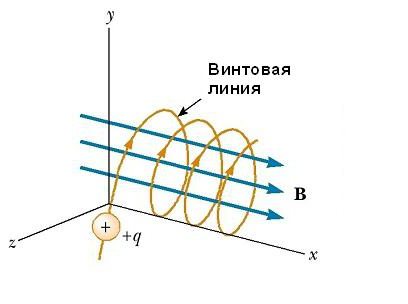
Если вектор v скорости частицы образует некоторый произвольный угол по отношению к вектору B, то ее траектория является винтовой линией. Например, если однородное поле будет направлено вдоль оси х, как показано на рисунке ниже, то не существует никакой компоненты магнитной силы FB в этом направлении. В результате составляющая ускорения ax= 0, и х-составляющая скорости движения частицы является постоянной. Однако магнитная сила FB = qv х В вызывает изменение во времени компонентов скорости vy и vz. В результате имеет место движение заряженной частицы в магнитном поле по винтовой линии, ось которой параллельна магнитному полю. Проекция траектории на плоскости yz (если смотреть вдоль оси х) представляет собой круг. Проекции ее на плоскости ху и xz являются синусоидами! Уравнения движения остаются такими же, как и при круговой траектории, при условии, что v заменяется на ν⊥ = √(νу 2 + νz 2 ).
Неоднородное магнитное поле: как в нем движутся частицы
Движение заряженной частицы в магнитном поле, являющемся неоднородным, происходит по сложным траекториям. Так, в поле, величина которого усиливается по краям области его существования и ослабляется в ее середине, как, например, показано на рисунке ниже, частица может колебаться вперед и назад между конечными точками.
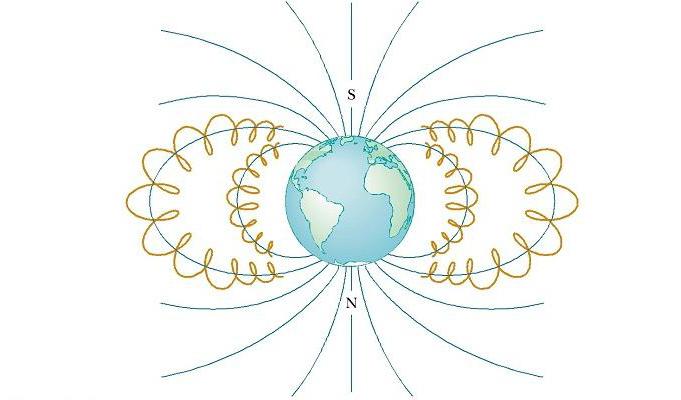
Как Земля влияет на движение космических частиц
Околоземные пояса Ван Аллена состоят из заряженных частиц (в основном электронов и протонов), окружающих Землю в форме тороидальных областей (см. рис. ниже). Движение заряженной частицы в магнитном поле Земли происходит по по спирали вокруг силовых линий от полюса до полюса, покрывая это расстояние в несколько секунд. Эти частицы идут в основном от Солнца, но некоторые приходят от звезд и других небесных объектов. По этой причине они называются космическими лучами. Большинство их отклоняется магнитным полем Земли и никогда не достигает атмосферы. Тем не менее, некоторые из частиц попадают в ловушку, именно они составляют пояса Ван Аллена. Когда они находятся над полюсами, иногда происходят столкновения их с атомами в атмосфере, в результате чего последние излучают видимый свет. Так возникают красивые Полярные сияния в Северном и Южном полушариях. Они, как правило, происходят в полярных регионах, потому что именно здесь пояса Ван Аллена расположены ближе всего к поверхности Земли.
Иногда, однако, солнечная активность вызывает большее число заряженных частиц, входящих в эти пояса, и значительно искажает нормальные силовые линии магнитного поля, связанные с Землей. В этих ситуациях полярное сияние можно иногда увидеть в более низких широтах.
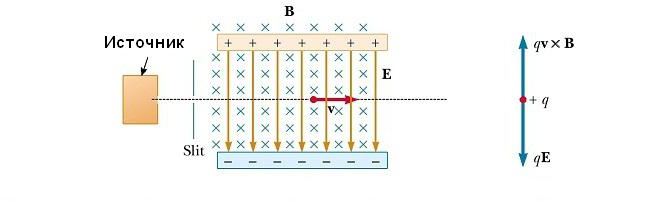
Селектор скоростей
Во многих экспериментах, в которых происходит движение заряженных частиц в однородном магнитном поле, важно, чтобы все частицы двигались с практически одинаковой скоростью. Это может быть достигнуто путем применения комбинации электрического поля и магнитного поля, ориентированного так, как показано на рисунке ниже. Однородное электрическое поле направлено вертикально вниз (в плоскости страницы), а такое же магнитное поле приложено в направлении, перпендикулярном к электрическому (за страницу).
Масс-спектрометр
Этот прибор разделяет ионы в соответствии с соотношением их массы к заряду. По одной из версий этого устройства, известного как масс-спектрометр Бэйнбриджа, пучок ионов проходит сначала через селектор скоростей и затем поступает во второе поле B0, также однородное и имеющее то же направление, что и поле в селекторе (см. рис. ниже). После входа в него движение заряженной частицы в магнитном поле происходит по полукругу радиуса r перед ударом в фотопластинку Р. Если ионы заряжены положительно, луч отклоняется вверх, как показано на рисунке. Если ионы заряжены отрицательно, луч будет отклоняться вниз. Из выражения для радиуса круговой траектории частицы, мы можем найти отношение m/q

и затем, используя уравнение v=E/B, мы находим, что

Таким образом, мы можем определить m/q путем измерения радиуса кривизны, зная поля величин B, B0, и E. На практике, так обычно измеряет массы различных изотопов данного иона, поскольку все они несут один заряд q. Таким образом, отношение масс может быть определено, даже если q неизвестно. Разновидность этого метода была использована Дж. Дж. Томсоном (1856-1940) в 1897 году для измерения отношение е/mе для электронов.
Циклотрон
Он может ускорить заряженные частицы до очень высоких скоростей. И электрические, и магнитные силы играют здесь ключевую роль. Полученные высокоэнергетические частицы используются для бомбардировки атомных ядер, и тем самым производят ядерные реакции, представляющие интерес для исследователей. Ряд больниц использует циклотронное оборудование для получения радиоактивных веществ для диагностики и лечения.
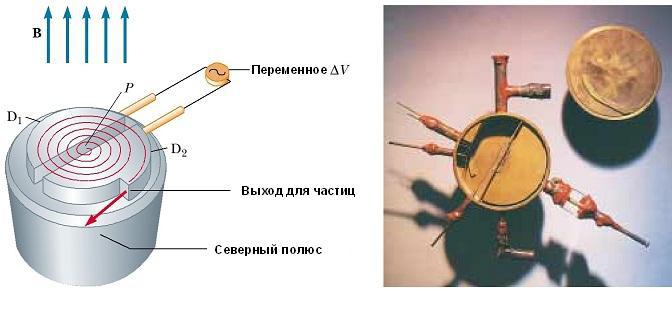
Схематическое изображение циклотрона показан на рис. ниже. Частицы движутся внутри двух полуцилиндрических контейнеров D 1 и D 2, называемых дуантами. Высокочастотная переменная разность потенциалов приложена к дуантам, разделенным зазором, а однородное магнитное поле направлено вдоль оси циклотрона (южный полюс его источника на рис. не показан).
Положительный ион, выпущенный из источника в точке Р вблизи центра устройства в первом дуанте, перемещается по полукруглой траектории (показана пунктирной красной линией на рисунке) и прибывает обратно в щель в момент времени Т / 2, где Т — время одного полного оборота внутри двух дуантов.
Частота приложенной разности потенциалов регулируется таким образом, что полярность дуантов меняется на обратную в тот момент времени, когда ион выходит из одного дуанта. Если приложенная разность потенциалов регулируется таким образом, что в этот момент D2 получает более низкий электрический потенциал, чем D1 на величину qΔV, то ион ускоряется в зазоре перед входом в D2, и его кинетической энергии увеличивается на величину qΔV. Затем он движется вокруг D2 по полукруглой траектории большего радиуса (потому что его скорость увеличилась).
Через некоторое время T / 2 он снова поступает в зазор между дуантами. К этому моменту полярность дуантов снова изменяется, и иону дается еще один «удар» через зазор. Движение заряженной частицы в магнитном поле по спирали продолжается, так что при каждом проходе одного дуанта ион получает дополнительную кинетическую энергию, равную qΔV. Когда радиус его траектории становится близким к радиусу дуантов, ион покидает систему через выходную щель. Важно отметить, что работа циклотрона основана на том, что Т не зависит от скорости иона и радиуса круговой траектории. Мы можем получить выражение для кинетической энергии иона, когда он выходит из циклотрона в зависимости от радиуса R дуантов. Мы знаем, что скорость кругового движения частицы — ν = qBR /m. Следовательно, ее кинетическая энергия

Когда энергии ионов в циклотрон превышает около 20 МэВ, в игру вступают релятивистские эффекты. Мы отмечаем, что T увеличивается, и что движущиеся ионы не остаются в фазе с приложенной разностью потенциалов. Некоторые ускорители решают эту проблему, изменяя период прикладываемой разности потенциалов, так что она остается в фазе с движущимися ионами.
Эффект Холла
Когда проводник с током помещается в магнитное поле, то дополнительная разность потенциалов создается в направлении, перпендикулярном к направлению тока и магнитного поля. Это явление, впервые наблюдаемое Эдвином Холлом (1855-1938) в 1879 году, известно как эффект Холла. Он всегда наблюдается, когда происходит движение заряженной частицы в магнитном поле. Это приводит к отклонению носителей заряда на одной стороне проводника в результате магнитной силы, которую они испытывают. Эффект Холла дает информацию о знаке носителей заряда и их плотности, он также может быть использован для измерения величины магнитных полей.
Устройство для наблюдения эффекта Холла состоит из плоского проводника с током I в направлении х, как показано на рисунке ниже.
Уравнение траектории тела — определение и формулы
Общие сведения
Под движением тела понимают процесс его перемещения из одной точки пространства в другую. Произошедшее действие исследуют относительно другого объекта или выбранных начальных координат. При этом положение вовсе не обязательно может изменяться сразу ко всем окружающим его телам. Например, стоящий человек на Земле находится в состоянии покоя по отношению к планете, но движется относительно Солнца.
В физике принято любое изменение определять в системе пространственных координат. За оси принимают перпендикулярные линии x, y, z. Совокупность данных, используемых для изучения движения, называют системой отсчёта.
Существует несколько видов механического перемещения (во времени) физической точки:
- равномерное и равноускоренно прямолинейное;
- по дуге;
- гармоническое колебание.
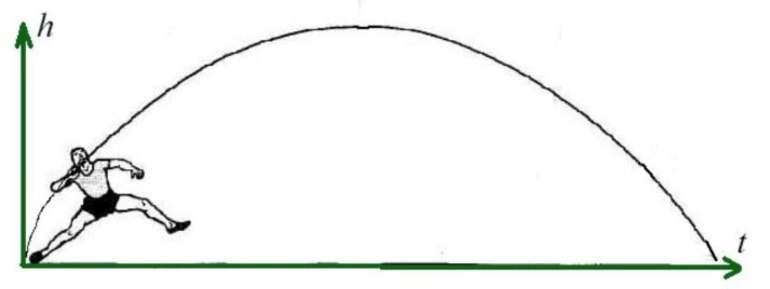
При движении тело проходит определённый путь. Описать его можно виртуальной линией, при этом она может быть как прямой, так и кривой. Именно она и называется траекторией движения. По сути, эта линия соединяет последовательно все положения точки в пространстве — от начальной до конечной. Длина отрезка является пройденным путём и считается векторной величиной.
Изменение радиус-вектора r (значения, задающего положение точки в пространстве относительно другого тела) описывает кинематический закон: r = r (t). В трёхмерных декартовых координатах его можно записать так: r = xe + ye + ze = (x, y, z). Вектор, построенный из начальной точки движущегося тела в расположение её в данный момент времени, то есть приращение радиус-вектора за определённый промежуток t, как раз и называют перемещением.
Результирующее движение же равно векторной сумме последовательных изменений положения. При прямолинейном перемещении вектор пути совпадает с соответствующим участком траектории, а модуль перестановки равняется пройденному расстоянию.
Время, за которое тело пройдёт по установленной траектории пути, называют скоростью. Фактически это быстрота изменения координаты. Физики, исследуя передвижение, изучают не только положение материальной точки в начальный и конечный момент времени, но и закон, по которому происходит перемещение. Другими словами, они определяют зависимость радиус-вектора от времени.
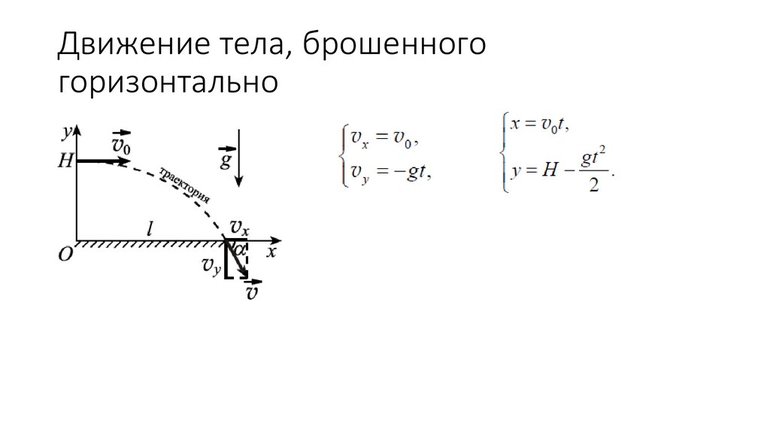
Горизонтальное перемещение
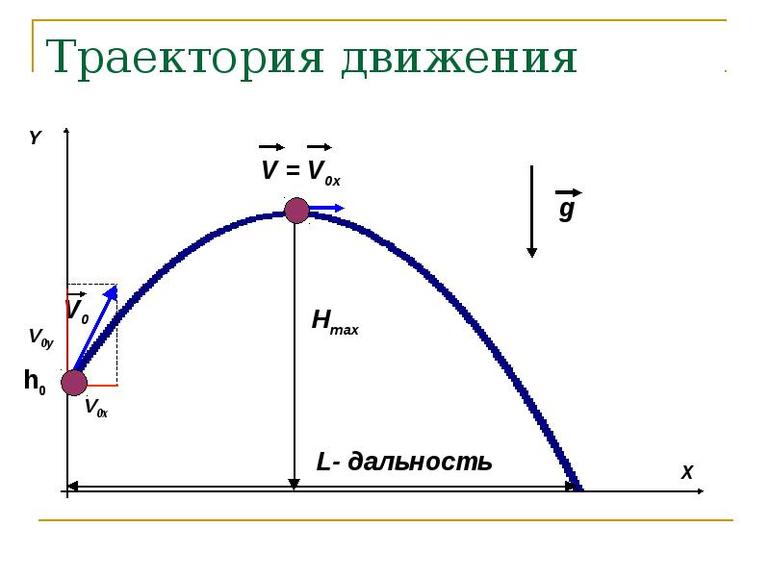
Пусть имеется тело, брошенное горизонтально поверхности. Высота падения равняется h, а начальная скорость V0. Здесь систему отсчёта удобно связать с Землёй. Объект будет передвигаться под действием силы тяжести. Остальными силами, например, сопротивлением воздуха, можно пренебречь. Тело перемещается в плоскости, содержащей вектора ускорения и свободного падения (g).
Таким образом, система начальных условий будет выглядеть так: x (t = 0) = 0; y (t = 0) = 0; v0x = v0; voy = 0. Вектор ускорения постоянный, поэтому a = g. Если тело представить как совокупность материальных точек, движущихся по одинаковому пути, то путь можно определить как сумму перемещений по прямым. Уравнение скорости примет вид: v (t) = v0 + gt. Об изменении положения можно сказать, что оно выполняется с постоянной скоростью и ускорением в горизонтальной плоскости, являясь равномерным. Значит, проекцию на оси ординаты и абсциссы можно записать как vx = v0; vy = -gt.
Скорость перемещения рассчитывают по формуле: V = √(V 2 x + V 2 y). После подстановки полученных ранее выражений равенство примет вид: V = √(V 2 0 + g 2 t 2 ). Отсюда следует, что уравнение для вектора движения материальной точки будет: s (t) = s0 + V0t + (g t 2 ) / 2, где: s0 — смещение тела, соответствующее начальному моменту времени.
Так как s0 = y (t = 0) = h0, то скалярные выражения для координат изменяющей положение частицы можно представить в виде системы: x = V0t; y = h0 — (gt 2 / 2). Перемещение происходит по прямой как отдельное движение в двух плоскостях, при этом из формулы следует, что изменение положения будет соответствовать правой половине направленной вниз параболы. Учитывая то, что время можно определить из отношения икса к начальной скорости (t = x /V0), можно записать окончательную формулу для вычисления траектории движения тела: y = h0 — (gx 2 ) / (2 2 V0) .
Можно сделать вывод, что уравнение траектории не записывается через время, поэтому частица будет и перемещаться обратно по той же самой траектории. Временные отрезки между точками пути будут одинаковы как при прямом, так и при обратном движении.
Каждому положению соответствует определённое значение скорости, которое не зависит от направления перемещения. Нужно отметить, что наибольшей величиной в горизонтальной траектории полёта будет начальная точка.
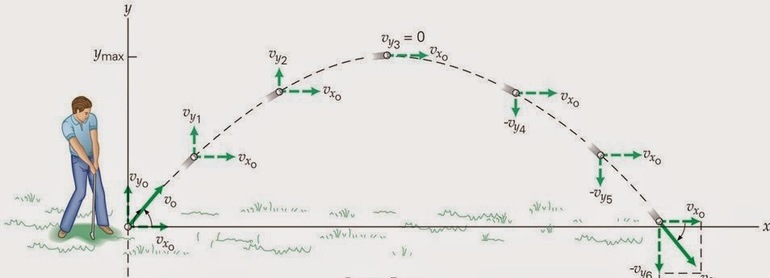
Движение тела под углом
Свободное падение является частным случаем равноускоренного, то есть на перемещаемый объект действует только сила притяжения. Если физическая точка перемещается, то кривая, которая описывается её радиус-вектором, обозначает пройденный путь. Эту траекторию можно описать некоторой математической функцией.
Итак, вектор скорости точки определяется как производная по времени: V = dr / dt = r. Ускорение же можно найти, продифференцировав скорость: a = dV / dt = d 2 r / dt. Если обозначить производную времени точкой, то формулу можно переписать так: a = V = r.
Для того чтобы вывести формулу, нужно воспользоваться основными выражениями, определяющими проекции:
- ускорения: ax = 0, ay = — g, az = 0;
- радиус-вектора: rx (t) = V0 * cosat, ry (t) = v * sin (at — (g * t2)/2)), rz (t) = 0;
- скорости: vx (t) = V0 * cosa, vy (t) = V0 * sin (a — gt), vz (t) = 0.
Чтобы запись зависимости вертикальной оси от горизонтальной была как можно более компактной, соответствующие координаты rx и ry можно обозначить через икс и игрек. Из уравнения, связывающего координатную ось X и время, можно определить t как функцию ординаты. Линейное выражение будет иметь вид: t = x / (Vo * cosa).
Если полученную формулу для времени подставить в уравнение для игрек координаты, то вместо временного параметра появится икс. То есть можно будет вывести зависимость абсциссы от ординаты: y = V 0 * sinat — (g * t 2 ) / 2 = (tga) * x — (g / 2 * V0 * cos 2 a) * x 2 . Значение t нужно подставить в каждое слагаемое, но при этом учесть, что отношение синуса к косинусу называют тангенсом. Альфа в формуле — это угол между направлением начальной скорости и горизонтальным направлением (угол броска). После исключения времени из этих уравнений получим уравнение траектории.
В итоге останется два слагаемых. Первое будет линейно по иксу, а второе квадратично. Таким образом, зависимость игрека от икса в уравнении траектории — это парабола (справа стоит квадратичная функция). Она проходит через начало координат. Если верно равенство x = 0, то игрек тоже будет равняться нулю.
Следует обратить внимание на то, что в квадрате стоит отрицательный коэффициент. Известно, что если перед квадратичным слагаемым в уравнении параболы стоит отрицательное число, то концы кривой будут направлены вниз.
Решение задач
Решение практических заданий лучше всего помогает закрепить полученные знания. Существуют физические сборники, которые интересны тем, что включают в себя различные примеры, приближенные к реалистичным задачам. Прорешивая их самостоятельно, ученик не только лучше разберётся в теме, но и научится применять полученные знания на практике.
Вот два таких задания:

- Пусть имеется тело, движение которого описывается равенствами: x = Vx * t; y = y0 + Vy * t. Нужно определить траекторию его перемещения, учитывая, что Vx = 20 см/с, Vy = 2 м/с, Yo = 0,2 м. Для решения задачи нужно записать систему, определяемую исходными данными. Затем из первого равенства выразить время: t = x / Vx. Полученную формулу можно подставить в выражение нахождения координат абсциссы: y = y0 + (Vy * x) / Vx. Если теперь использовать исходные данные, то уравнение, описывающее траекторию, примет вид: y = 0.2 + 4x. Равенство напоминает собой формулу прямой: y = k * x + b. Исходя из этого можно утверждать, что траектория пути также будет представлять собой прямую линию. Действительно, в этом можно убедиться, если построить график движения. Для этого нужно взять несколько произвольных значений для икса, подставить их в формулу и найти вторую координату.
- Следующая задача довольно интересная. Нужно составить траекторию движения для тела, движущегося равномерно со скоростью два метра в секунду, при отклонении пути от оси икс на 60 градусов. За начало координат нужно принять точку (0, 0). Тогда начальный радиус-вектор тоже будет равен нулю: R = 0. Для успешного решения примера понадобится вспомнить скалярные уравнения для проекции при равномерном движении. Так как по условию вектор задан, то можно найти его проекцию на ось игрек: Vx = v * cos60 = 1; Vy = v * cos30 = √3. Отсюда: x = Vx * t = t; y = Vy * t = √3t.
Таким образом, чтобы успешно решать задачи, нужно знать несколько основных формул для определения местоположения тела, а также то, как выглядят уравнения параболы и прямой.
Стоит отметить, что существующие онлайн-калькуляторы не умеют вычислять формулы, описывающие траекторию пути. Но вместе с тем их можно использовать для выполнения расчётов или как справочники.
http://www.syl.ru/article/203046/new_dvijenie-zaryajennoy-chastitsyi-v-magnitnom-pole-formulyi-dvijenie-zaryajennyih-chastits-v-odnorodnom-magnitnom-pole
http://nauka.club/fizika/formula-uravneniya-traektorii-tela-dvizhushchegosya-pod-uglom.html
Траектория движения в физике, теория и онлайн калькуляторы
Траектория движения
Определение и основные понятия траектории движения
Во многих задачах интерес представлю не только перемещения материальных точек в пространстве, но и траектории их движения.
Определение
Линию, которую описывает частица при своем движении, называется траекторией движения.
В зависимости от формы траектории механическое движение можно разделить на:
- прямолинейное движение, траекторией движения точки в этом случае является прямая линия;
- и криволинейное перемещение (траектория — кривая линия).
Форма траектории зависит от выбора системы отсчета. В разных системах отсчета траектории могут быть представлены разными линиями, могут быть прямыми и кривыми.
При движении точки с постоянным ускорением, которое описывает уравнение:
[overline{r}left(tright)={overline{r}}_0+{overline{v}}_0t+frac{overline{a}t^2}{2}left(1right),]
(где $overline{r}left(tright)$ — радиус-вектор точки в момент времени $t$; ${overline{v}}_0$ — начальная скорость движения точки; $overline{a}$ — ускорение точки,) траектория движения представляет собой плоскую кривую, что означает все точки этой кривой находятся в одной плоскости. Положение этой плоскости в пространстве задают векторы ускорения и начальной скорости. Ориентацию координатных осей чаще всего выбирают так, чтобы плоскость движения совпадала с одной из координатных плоскостей. В этом случае векторное уравнение (1) можно свести к двум скалярным уравнениям.
Уравнение траектории движения
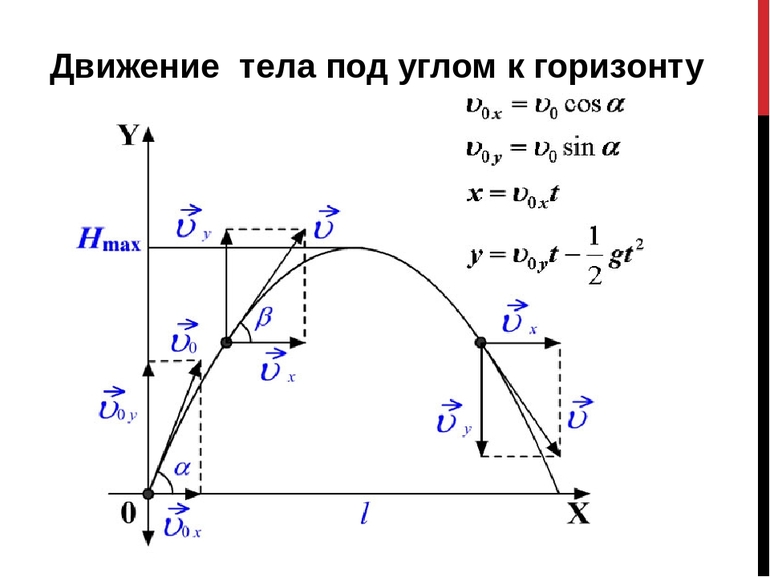
Рассмотрим свободное движение тела около поверхности Земли. Начало координат разместим в точке бросания тела (рис.1). Оси координат направим так, как изображено на рис.1.
Тогда уравнение движения тела (1) в проекциях на координатные оси декартовой системы координат принимает вид системы из двух уравнений:
[left{ begin{array}{c}
x=v_0t{cos alpha left(2right), } \
y=v_0t{sin alpha }-frac{gt^2}{2}left(3right). end{array}
right.]
Для того чтобы получить уравнение траектории движения тела ($y=y(x)$) следует исключить время движения тела из уравнений (2) и (3). Выразим из уравнения (2) $t$ и подставим его в выражение (3), получим:
[t=frac{x}{v_0{cos alpha }}; y=v_0frac{x}{v_0{cos alpha }}{sin alpha }-frac{g}{2}{left(frac{x}{v_0{cos alpha }}right)}^2to y=x tg alpha -frac{gx^2}{2v^2_0{cos}^2alpha }left(4right).]
Выражение (4) это уравнение параболы, проходящей через начало координат. Ее верви направлены вниз, так как коэффициент при $x^2$ меньше нуля.
Вершина этой параболы находится в точке с координатами:
[left{ begin{array}{c}
x=frac{v^2_0{sin alpha {cos alpha } }}{g} \
y=frac{v^2_0{sin}^2alpha }{2g} end{array}
right.left(5right).]
Найти координаты вершины траектории можно при помощи известных правил исследования функций на экстремум. Так, положение максимума функции $y(x)$ определяют, приравнивая к нулю первую производную ($frac{dy}{dx}$) от нее по $x$.
Обратимость движения
Из представления о траектории можно конкретизировать смысл обратимости механического движения.
Пусть частица движется в силовом поле таком, что ее ускорение в любой точке обладает определенной величиной, не зависящей от скорости. Как будет двигаться эта частица, если, в какой то точке ее траектории направление скорости заменить противоположным? С точки зрения математики это эквивалентно замене $t $ на $-t$ для всех уравнений. Уравнение траектории время не содержит, получается, что частица будет перемещаться «вспять» по той же самой траектории. При этом отрезки времени между любыми точками траектории будут одинаковы при прямом и обратном движении. Всякой точке траектории ставится в соответствие определенное значение величины скорости независимо от направления движения по данной траектории. Данные свойства наглядны в колебательных движениях маятника.
Все сказанное выше справедливо тогда, когда можно пренебречь любым сопротивлением движению. Обратимость движения существует, когда выполняется закон сохранения механической энергии.
Параметры траектории движения
Положение точек системы отсчета можно определять при помощи разных способов. В соответствии с этими способами описывают и движение точки или тела:
- Координатная форма описания движения. Выбирается система координат, в ней положение точки характеризуют тремя координатами (в трехмерном пространстве). Это могут быть координаты $x_1=x,x_2=y,x_3=z$, в декартовой системе координат. $x_1=rho ,x_2=varphi ,x_3= z$ в цилиндрической системе и т.д. При перемещении точки координаты являются функциями времени. Описать движение точки — это значит указать эти функции:
- При описании движения в векторной форме положение материальной точки задает радиус-вектор ($overline{r}$) по отношению к точке, которую принимают начальной. В этом случае вводят точку (тело) отсчета. При перемещении точки вектор $overline{r}$ постоянно изменяется. Конец этого вектора описывает траекторию. Движение задает выражение:
- Третьим способом описания движения является описание с помощью параметров траектории.
[x_1=x_1left(tright);; x_2=x_2left(tright);; x_3=x_3left(tright)left(6right).]
[overline{r}=overline{r}left(tright)left(7right).]
Путь — это скалярная величина, равная длине траектории.
Если траектория задана, то задачу описания движения сводят к определению закона движения вдоль нее. При этом выбирается начальная точка траектории. Любая другая точка характеризуется расстоянием $s$ по траектории от начальной точки. В таком случае движение описывают выражением:
[s=sleft(tright)left(8right).]
Пусть по окружности радиуса R равномерно перемещается точка. Закон движения точки по окружности в рассматриваемом методе запишем как:
[s=Atleft(9right),]
где $s$ — путь точки по траектории; $t$ — время движения; $A$ — коэффициент пропорциональности. Известными являются окружность и точка начала движения. Отсчет положительных величин $s$ совпадает с направлением перемещения точки по траектории.
Знание траектории движения тела во многих случаях существенно упрощает процесс описания движения тела.
Примеры задач с решением
Пример 1
Задание: Точка движется в плоскости XOY из начала координат со скоростью $overline{v}=Aoverline{i}+Bxoverline{j} , $где $overline{i}$, $overline{j}$ — орты осей X и Y; $A$,B — постоянные величины. Запишите уравнение траектории движения точки ($y(x)$). Изобразите траекторию. textit{}
Решение: Рассмотрим уравнение изменения скорости частицы:
[overline{v}=Aoverline{i}+Bxoverline{j} left(1.1right).]
Из этого уравнения следует, что:
[left{ begin{array}{c}
v_x=A, \
v_y=Bx end{array}
right.left(1.2right).]
Из (1.2) имеем:
[dx=v_xdt=Adtto dt=frac{dx}{A};;dy=v_ydt=Bxdtto dy=Bxfrac{dx}{A} left(1.3right).]
Для получения уравнения траектории следует решить дифференциальное уравнение (1.3):
[y=intlimits^x_0{frac{B}{A}}xdx=frac{B}{2A}x^2.]
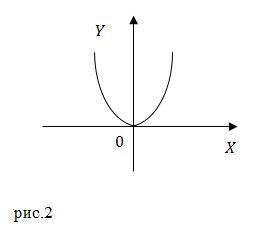
Мы получили уравнение параболы, ветви которой направлены вверх. Эта парабола проходит через начало координат. Минимум этой функции находится в точке с координатами:
[left{ begin{array}{c}
x=0 \
y=0. end{array}
right.]
Пример 2
Задание: Движение материальной точки в плоскости описывает система уравнений: $left{ begin{array}{c}
x=At. \
y=At(1+Bt) end{array}
right.$, где $A$ и $B$ — положительные постоянные. Запишите уравнение траектории точки.
Решение: Рассмотрим систему уравнений, которая задана в условии задачи:
[left{ begin{array}{c}
x=At. \
y=Atleft(1+Btright) end{array}
right.left(2.1right).]
Исключим время из уравнений системы. Для этого из первого уравнения системы выразим время, получим:
[t=frac{x}{A}left(2.2right).]
Подставим вместо $t$ правую (2.2) часть во второе уравнение системы (2.1), имеем:
[y=Atleft(1+Btright)=At+ABt^2=Afrac{x}{A}+AB{(frac{x}{A})}^2=x+frac{B}{A}x^2.]
Ответ: $y=x+frac{B}{A}x^2$
Читать дальше: ускорение тела.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Как известно, электрическое поле принято характеризовать величиной силы, с которой оно действует на пробный единичный электрический заряд. Магнитное поле традиционно характеризуют силой, с которой оно действует на проводник с «единичным» током. Однако при его протекании происходит упорядоченное движение заряженных частиц в магнитном поле. Поэтому мы можем определить магнитное поле B в какой-то точке пространства с точки зрения магнитной силы FB, которую поле оказывает на частицу при ее движении в нем со скоростью v.
Общие свойства магнитной силы
Эксперименты, в которых наблюдалось движение заряженных частиц в магнитном поле, дают такие результаты:
- Величина FB магнитной силы, действующей на частицу пропорциональна заряду q и скорости v частицы.
- Если движение заряженной частицы в магнитном поле происходит параллельно вектору этого поля, то сила, действующая на нее, равна нулю.
- Когда вектор скорости частицы составляет любой Угол θ ≠ 0 с магнитным полем, то сила действует в направлении, перпендикулярном к v и B; то есть, FB перпендикулярна плоскости, образованной v и B (см.рис. ниже).
- Величина и направление FB зависит от скорости частицы и от величины и направления магнитного поля B.
- Направление силы, действующей на положительный заряд, противоположно направлению такой же силы, действующей на отрицательный заряд, движущийся в ту же сторону.
- Величина магнитной силы, действующей на движущуюся частицу, пропорциональна sinθ угла θ между векторами v и B.
Сила Лоренца
Мы можем суммировать вышеперечисленные наблюдения путем записи магнитной силы в виде FB = qv х B.
Когда происходит движение заряженной частицы в магнитном поле, сила Лоренца FB при положительном q направлена вдоль векторного произведения v x B. Оно по определению перпендикулярно как v, так и B. Считаем это уравнение рабочим определением магнитного поля в некоторой точке в пространстве. То есть оно определяется в терминах силы, действующей на частицу при ее движении. Таким образом, движение заряженной частицы в магнитном поле кратко можно определить как перемещение под действием этой силы.
Заряд, движущийся со скоростью v в присутствии как электрического поля E, так и магнитного B, испытывает действие как электрической силы qE, так и магнитной qv х В. Полное приложенное к нему воздействие равно FЛ = qE + qv х В. Его принято называть так: полная сила Лоренца.
Движение заряженных частиц в однородном магнитном поле
Рассмотрим теперь частный случай положительно заряженной частицы, движущейся в однородном поле, с начальным вектором скорости, перпендикулярным ему. Предположим, что вектор B поля направлен за страницу. Рисунок ниже показывает, что частица движется по кругу в плоскости, перпендикулярной к B.
Движение заряженной частицы в магнитном поле по окружности происходит потому, что магнитная сила FB направлена под прямым углом к v и B и имеет постоянную величину qvB. Поскольку сила отклоняет частицы, направления v и FB изменяются непрерывно, как показано на рисунке. Так как FB всегда направлена к центру окружности, она изменяет только направление v, а не ее величину. Как показано на рисунке, движение положительно заряженной частицы в магнитном поле происходит против часовой стрелки. Если q будет отрицательным, то вращение произойдет по часовой стрелке.
Динамика кругового движения частицы
Какие же параметры характеризуют вышеописанное движение заряженной частицы в магнитном поле? Формулы для их определения мы можем получить, если возьмем предыдущее уравнение и приравняем FB центробежной силе, требуемой для сохранения круговой траектории движения:
То есть радиус окружности пропорционален импульсу mv частицы и обратно пропорционален величине ее заряда и величине магнитного поля. Угловая скорость частицы
Период, с которым происходит движение заряженной частицы в магнитном поле по кругу, равен длине окружности, разделенной на ее линейную скорость:
Эти результаты показывают, что угловая скорость частицы и период кругового движения не зависит от линейной скорости или от радиуса орбиты. Угловую скорость ω часто называют циклотронной частотой (круговой), потому что заряженные частицы циркулируют с ней в типе ускорителя под названием циклотрон.
Движение частицы под углом к вектору магнитного поля
Если вектор v скорости частицы образует некоторый произвольный угол по отношению к вектору B, то ее траектория является винтовой линией. Например, если однородное поле будет направлено вдоль оси х, как показано на рисунке ниже, то не существует никакой компоненты магнитной силы FB в этом направлении. В результате составляющая ускорения ax= 0, и х-составляющая скорости движения частицы является постоянной. Однако магнитная сила FB = qv х В вызывает изменение во времени компонентов скорости vy и vz. В результате имеет место движение заряженной частицы в магнитном поле по винтовой линии, ось которой параллельна магнитному полю. Проекция траектории на плоскости yz (если смотреть вдоль оси х) представляет собой круг. Проекции ее на плоскости ху и xz являются синусоидами! Уравнения движения остаются такими же, как и при круговой траектории, при условии, что v заменяется на ν⊥ = √(νу2 + νz2).
Неоднородное магнитное поле: как в нем движутся частицы
Движение заряженной частицы в магнитном поле, являющемся неоднородным, происходит по сложным траекториям. Так, в поле, величина которого усиливается по краям области его существования и ослабляется в ее середине, как, например, показано на рисунке ниже, частица может колебаться вперед и назад между конечными точками.
Заряженная частица стартует с одного конца винтовой линии, накрученной вдоль силовых линий, и движется вдоль нее, пока не достигнет другого конца, где она поворачивает свой путь обратно. Эта конфигурация известна как «магнитная бутылка», поскольку заряженные частицы могут быть захвачены в нее. Она была использована, чтобы ограничить плазму, газ, состоящий из ионов и электронов. Такая схема плазменного заключения может выполнять ключевую роль в контроле ядерного синтеза, процессе, который представит нам почти бесконечный источник энергии. К сожалению, «магнитная бутылка» имеет свои проблемы. Если в ловушке большое число частиц, столкновения между ними вызывают утечку их из системы.
Как Земля влияет на движение космических частиц
Околоземные пояса Ван Аллена состоят из заряженных частиц (в основном электронов и протонов), окружающих Землю в форме тороидальных областей (см. рис. ниже). Движение заряженной частицы в магнитном поле Земли происходит по по спирали вокруг силовых линий от полюса до полюса, покрывая это расстояние в несколько секунд. Эти частицы идут в основном от Солнца, но некоторые приходят от звезд и других небесных объектов. По этой причине они называются космическими лучами. Большинство их отклоняется магнитным полем Земли и никогда не достигает атмосферы. Тем не менее, некоторые из частиц попадают в ловушку, именно они составляют пояса Ван Аллена. Когда они находятся над полюсами, иногда происходят столкновения их с атомами в атмосфере, в результате чего последние излучают видимый свет. Так возникают красивые Полярные сияния в Северном и Южном полушариях. Они, как правило, происходят в полярных регионах, потому что именно здесь пояса Ван Аллена расположены ближе всего к поверхности Земли.
Иногда, однако, солнечная активность вызывает большее число заряженных частиц, входящих в эти пояса, и значительно искажает нормальные силовые линии магнитного поля, связанные с Землей. В этих ситуациях полярное сияние можно иногда увидеть в более низких широтах.
Селектор скоростей
Во многих экспериментах, в которых происходит движение заряженных частиц в однородном магнитном поле, важно, чтобы все частицы двигались с практически одинаковой скоростью. Это может быть достигнуто путем применения комбинации электрического поля и магнитного поля, ориентированного так, как показано на рисунке ниже. Однородное электрическое поле направлено вертикально вниз (в плоскости страницы), а такое же магнитное поле приложено в направлении, перпендикулярном к электрическому (за страницу).
Для положительного q магнитная сила FB=qv х В направлена вверх, а электрическая сила qE – вниз. Когда величины двух полей выбраны так, что qE = qvB, то частица движется по прямой горизонтальной линии через область поля. Из выражения qE = qvB мы находим, что только частицы, имеющие скорость v=E/B, проходят без отклонения через взаимно перпендикулярные электрическое и магнитное поля. Сила FB, действующая на частицы, движущиеся со скоростью большей, чем v=E/B, оказывается больше электрической, и они отклоняются вверх. Те же из них, которые движутся с меньшей скоростью, отклоняются вниз.
Масс-спектрометр
Этот прибор разделяет ионы в соответствии с соотношением их массы к заряду. По одной из версий этого устройства, известного как масс-спектрометр Бэйнбриджа, пучок ионов проходит сначала через селектор скоростей и затем поступает во второе поле B0, также однородное и имеющее то же направление, что и поле в селекторе (см. рис. ниже). После входа в него движение заряженной частицы в магнитном поле происходит по полукругу радиуса r перед ударом в фотопластинку Р. Если ионы заряжены положительно, луч отклоняется вверх, как показано на рисунке. Если ионы заряжены отрицательно, луч будет отклоняться вниз. Из выражения для радиуса круговой траектории частицы, мы можем найти отношение m/q
![]()
и затем, используя уравнение v=E/B, мы находим, что
Таким образом, мы можем определить m/q путем измерения радиуса кривизны, зная поля величин B, B0, и E. На практике, так обычно измеряет массы различных изотопов данного иона, поскольку все они несут один заряд q. Таким образом, отношение масс может быть определено, даже если q неизвестно. Разновидность этого метода была использована Дж. Дж. Томсоном (1856-1940) в 1897 году для измерения отношение е/mе для электронов.
Циклотрон
Он может ускорить заряженные частицы до очень высоких скоростей. И электрические, и магнитные силы играют здесь ключевую роль. Полученные высокоэнергетические частицы используются для бомбардировки атомных ядер, и тем самым производят ядерные реакции, представляющие интерес для исследователей. Ряд больниц использует циклотронное оборудование для получения радиоактивных веществ для диагностики и лечения.
Схематическое изображение циклотрона показан на рис. ниже. Частицы движутся внутри двух полуцилиндрических контейнеров D 1 и D 2, называемых дуантами. Высокочастотная переменная разность потенциалов приложена к дуантам, разделенным зазором, а однородное магнитное поле направлено вдоль оси циклотрона (южный полюс его источника на рис. не показан).
Положительный ион, выпущенный из источника в точке Р вблизи центра устройства в первом дуанте, перемещается по полукруглой траектории (показана пунктирной красной линией на рисунке) и прибывает обратно в щель в момент времени Т / 2, где Т — время одного полного оборота внутри двух дуантов.
Частота приложенной разности потенциалов регулируется таким образом, что полярность дуантов меняется на обратную в тот момент времени, когда ион выходит из одного дуанта. Если приложенная разность потенциалов регулируется таким образом, что в этот момент D2 получает более низкий электрический потенциал, чем D1 на величину qΔV, то ион ускоряется в зазоре перед входом в D2, и его кинетической энергии увеличивается на величину qΔV. Затем он движется вокруг D2 по полукруглой траектории большего радиуса (потому что его скорость увеличилась).
Через некоторое время T / 2 он снова поступает в зазор между дуантами. К этому моменту полярность дуантов снова изменяется, и иону дается еще один «удар» через зазор. Движение заряженной частицы в магнитном поле по спирали продолжается, так что при каждом проходе одного дуанта ион получает дополнительную кинетическую энергию, равную qΔV. Когда радиус его траектории становится близким к радиусу дуантов, ион покидает систему через выходную щель. Важно отметить, что работа циклотрона основана на том, что Т не зависит от скорости иона и радиуса круговой траектории. Мы можем получить выражение для кинетической энергии иона, когда он выходит из циклотрона в зависимости от радиуса R дуантов. Мы знаем, что скорость кругового движения частицы — ν = qBR /m. Следовательно, ее кинетическая энергия
Когда энергии ионов в циклотрон превышает около 20 МэВ, в игру вступают релятивистские эффекты. Мы отмечаем, что T увеличивается, и что движущиеся ионы не остаются в фазе с приложенной разностью потенциалов. Некоторые ускорители решают эту проблему, изменяя период прикладываемой разности потенциалов, так что она остается в фазе с движущимися ионами.
Эффект Холла
Когда проводник с током помещается в магнитное поле, то дополнительная разность потенциалов создается в направлении, перпендикулярном к направлению тока и магнитного поля. Это явление, впервые наблюдаемое Эдвином Холлом (1855-1938) в 1879 году, известно как эффект Холла. Он всегда наблюдается, когда происходит движение заряженной частицы в магнитном поле. Это приводит к отклонению носителей заряда на одной стороне проводника в результате магнитной силы, которую они испытывают. Эффект Холла дает информацию о знаке носителей заряда и их плотности, он также может быть использован для измерения величины магнитных полей.
Устройство для наблюдения эффекта Холла состоит из плоского проводника с током I в направлении х, как показано на рисунке ниже.
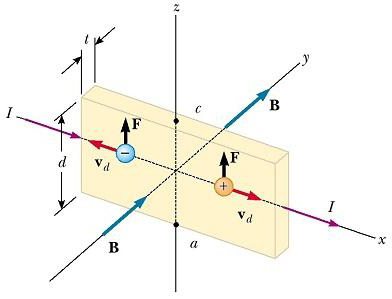
Однородное поле B приложено в направлении у. Если носителями заряда являются электроны, движущиеся вдоль оси х со скоростью дрейфа vd, то они испытывают направленную вверх (с учетом отрицательного q) магнитную силу FB = qvd х B, отклоняются вверх и накапливаются на верхнем краю плоского проводника, в результате чего появляется избыток положительного заряда на нижнем краю. Это накопление заряда на краях увеличивается до тех пор, пока электрическая сила, появившаяся в результате разделения зарядов, не уравновешивает магнитную силу, действующую на носители. Когда это равновесие будет достигнуто, электроны больше не отклоняются вверх. Чувствительный вольтметр или потенциометр, подключенный к верхней и нижней граням проводника, может измерить разность потенциалов, известную как ЭДС Холла.
2021-01-30 ![]()
Частица движется в плоскости XOY со скоростью $vec{v} = alpha vec{i} + beta x vec{j}$, где $vec{i}, vec{j}$ — орты осей X и Y; $alpha, beta$ — постоянные. В начальный момент частица находилась в точке $x = y = 0$. Найти:
1) уравнение траектории частицы $y(x)$;
2) радиус кривизны траектории в зависимости от $x$.
Решение:
1. Найдем уравнение движения частицы в декартовых координатах и исключим из них время $t$. По условию $vec{v} = alpha vec{i} + beta x vec{j}$, откуда
$begin{cases} v_{x} = alpha \ v_{y} = beta x end{cases}, v = sqrt{ v_{x}^{2} + v_{y}^{2} } = sqrt{ alpha^{2} + beta^{2}x^{2} }$.
По определению, $vec{v} = frac{d vec{r} }{dt}$, или в декартовых координатах
$v_{x} = frac{dx}{dt}; v_{y} = frac{dy}{dt}$. Т.к. $dx = v_{x} dt, x = int v_{x} dt = int alpha dt = alpha t + C_{1}$.
Константу $C_{1}$ интегрирования найдем, используя начальные условия: $begin{cases} t = 0 \ x = 0 end{cases} Rightarrow 0 = 0 + C_{1} Rightarrow C_{1} = 0$. Следовательно, $x = alpha t$.
Так как $dy = v_{y} dt$, то $y = int v_{y} dt = int beta x dt = int alpha beta tdt = frac{1}{2} alpha beta t^{2} + C_{2}$.
Константу интегрирования найдем аналогично предыдущему: $begin{cases} t = 0 \ y = 0 end{cases} Rightarrow 0 = 0 + C_{2} Rightarrow C_{2} = 0$. Следовательно, $y = frac{1}{2} alpha beta t^{2}$.
Найдем уравнение траектории $y(x)$
$begin{cases} x = alpha t \ y = frac{1}{2} alpha beta t^{2} end{cases} Rightarrow t = frac{x}{ alpha} : y = frac{ alpha beta }{2} frac{x^{2} }{ alpha^{2} } = frac{ beta }{2 alpha } x^{2}$.
Траектория частицы представляет собой параболу. График траектории изображен на рис.

2. Чтобы определить радиус кривизны траектории $R$, надо воспользоваться выражением для нормального ускорения $a_{n} = frac{v^{2} }{R}$, откуда $R = frac{v^{2} }{a_{n} }$.
Нормальное ускорение $a_{n}$ можно найти из следующих соотношений:
$a = sqrt{a_{n}^{2} + a_{ tau }^{2} }, a_{ tau } = frac{dv}{dt}, a = sqrt{ a_{x}^{2} + a_{y}^{2} }, a_{x} = frac{dv_{x} }{dt}, a_{y} = frac{dv_{y} }{dt}$.
Так как $v_{x} = alpha = const, a_{x} = 0, a_{y} = frac{dv_{y} }{dx} frac{dx}{dt} = beta alpha$, то $a = a_{y} = beta alpha$.
Так как $a_{ tau } = frac{dv}{dt}$, то тангенциальное ускорение $a_{ tau } = frac{dv}{dx} frac{dx}{dt} = frac{ alpha^{2} beta x }{ sqrt{ alpha^{2} + beta^{2}x^{2} } }$, а нормальное ускорение $a_{n} = sqrt{a^{2} — a_{ tau }^{2} } = frac{ alpha^{2} beta }{ sqrt{ alpha^{2} + beta^{2} x^{2} } }$.
Радиус кривизны $R = frac{ alpha }{ beta } left ( 1 + frac{ beta^{2}x^{2} }{ alpha^{2} } right )^{ 3/2 }$. Отметим, что для определения нормального ускорения можно использовать формулу $a_{n} = a cos phi$, где $phi$ — угол между векторами $vec{a}_{n}$ и $vec{a}$.
Как следует из рис. $cos phi = frac{v_{x} }{v}$, т.е. $cos phi = frac{ alpha }{ sqrt{ alpha^{2} + beta^{2}x^{2} } }$.
Используя $a_{n} = a cos phi$, получаем $a_{n} = frac{ alpha^{2} beta }{ sqrt{ alpha^{2} + beta^{2}x^{2} } }$, что совпадает ранее полученной формулой.
Рассмотpим задачу
об относительном движении двух
взаимодействующих частиц, котоpая
допускает полное pешение в общем виде, —
задачу двух тел. Потенциальная
энеpгия взаимодействия двух частиц
зависит лишь от pасстояния между ними,
то есть от абсолютной величины pазности
их pадиус-вектоpов. Энеpгия такой системы
может быть пpедставлена в виде![]() Введем
Введем
вектоp взаимного pасстояния обеих точек![]() и поместим начало кооpдинат в центp
и поместим начало кооpдинат в центp
инеpции, что дает![]() .
.
Из двух последних pавенств находим![]() и
и![]() .Диффеpенциpуя
.Диффеpенциpуя
эти выpажения по вpемени, получаем![]() и
и![]() ,
,
где![]() —
—
относительная скорость движения двух
материальных точек. Кинетическая энергия
равна
 где
где
![]() — пpиведенная масса. В результате в
— пpиведенная масса. В результате в
системе центра инерции полная энеpгия
pавна![]() .
.
Таким образом, задача двух тел свелась
к движению одной материальной точки с
приведенной массой в центральном поле![]() .
.
Центpальным называется поле, потенциальная
энергия которого зависит лишь от
расстояния до определенной неподвижной
точки.
При движении в
центральном поле сохраняется момент
импульса относительно центра поля. Для
одной частицы
![]() .
.
Поскольку векторы![]() и
и![]() взаимно перпендикулярны, постоянство
взаимно перпендикулярны, постоянство
момента (в данном случае по направлению)
означает, что при движении частицы ее
радиус-векторrвсе время остается в одной плоскости,
перпендикулярной к вектоpу![]() .
.
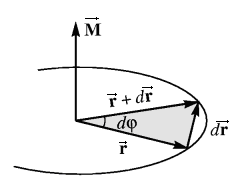
При движении одной
матеpиальной точки закон сохранения
момента импульса имеет простой
геометрический смысл. Введем вектор
![]() ,
,
величина которого равна площади,
описываемой радиус-вектором частицы![]() за время
за время![]() (перемещение при этом равно
(перемещение при этом равно![]() ),
),
а направление совпадает с нормалью к
плоскости движения . Тогда, как
следует из pис. 4.21,![]() .
.
|
Рис. 4.21.Связь |
Поделив это
pавенство на
![]() ,
,
имеем![]() .
.
Величина
![]() опpеделяет площадь, описываемую pадиус-
опpеделяет площадь, описываемую pадиус-
вектоpом частицы в единицу вpемени. Она
называется сектоpиальной скоpостью.
Таким образом, сохранение момента
означает постоянство секториальной
скорости, то есть пpи движении в центpальном
поле за равные промежутки времени
радиус-вектор движущейся точки описывает
равные площади. Это второй закон Кеплера,
(1609 г.).
Сектоpиальную
скоpость можно выpазить чеpез скоpость
изменения угла φ со временем. Для этого
pазложим вектоp
![]() на две компоненты, паpаллельную и
на две компоненты, паpаллельную и
пеpпендикуляpную вектоpу![]() ,
,![]() .Тогда
.Тогда![]() Поскольку
Поскольку![]() ,
,
а![]() ,
,
то
![]() ,
,
поэтому
![]() .
.
Следовательно,![]() .
.
Полное решение
задачи о движении в центральном поле
проще всего получить исходя из законов
сохранения энергии и момента, не выписывая
при этом самих уравнений движения. При
этом нам будет удобно пользоваться не
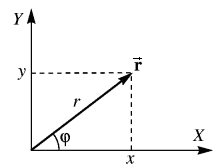
декартовыми координатами xиyв плоскости, в
котоpой пpоисходит движение, а так
называемыми поляpными координатами, в
которых положение материальной точки
задается координатамиrиφ(pис. 4.22).
|
Рис. 4.22.Поляpные кооpдинаты. |
Потенциальная
энеpгия зависит лишь от кооpдинаты r,
так что ее пpеобpазовывать не нужно.
Кинетическая энергия определяется
квадратом скорости частицы. В декаpтовых
кооpдинатах
![]() .
.
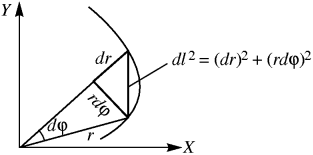
Hам надо пpеобpазовать
эту величину к поляpным кооpдинатам. Из
pис. 4.23 следует, что квадpат элемента
длины в поляpных кооpдинатах pавен
![]() ,
,
поэтому![]()
|
Рис. 4.23.Элемент длины в поляpных кооpдинатах |
В результате полную
энергию системы можно представить в
виде
![]() Но
Но
производная
![]() связана с сохраняющейся величиной
связана с сохраняющейся величиной
момента![]() .
.
Поэтому, подставляя в выражение для
энергии![]() ,
,
получим
![]() .
.
Отсюда можно выразить радиальную
скорость частицы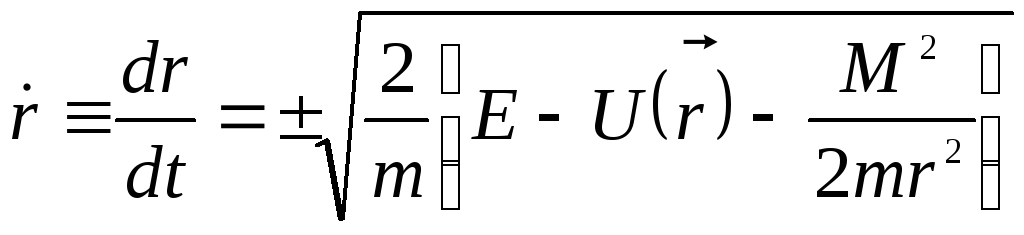 .
.
Это дифференциальное
уравнение с разделяющимися переменными
для определения функции
![]() .
.
Интегpиpуя, получим .
.
Таким образом, если мы сумеем вычислить
интеграл, мы найдем связьrсt, а потом из закона
сохранения момента импульса можно будет
найти зависимостьφотt:![]() ,
,
или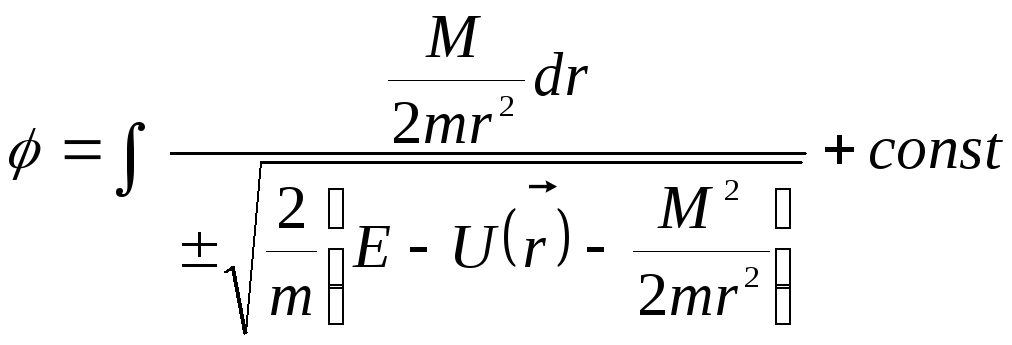 .
.
Это есть уравнение
траектории частицы в поляpных кооpдинатах.
Выражение для
энергии показывает, что радиальную
часть движения можно рассматривать как
одномерное движение в поле с «эффективной»
потенциальной энергией
![]() .
.
Величину![]() называют центробежной энергией. Значенияr, при которых
называют центробежной энергией. Значенияr, при которых![]() ,
,
определяют границы области движения
по расстоянию от центра. При выполнении
этого равенства радиальная скорость![]() обращается
обращается
в нуль. Это не означает остановки частицы
(как при истинном одномерном движении),
так как угловая скорость![]() нигде не обращается в нуль. Равенство
нигде не обращается в нуль. Равенство![]() описывает точку поворота траектории,
описывает точку поворота траектории,
в которой функция![]() переходит от увеличения к уменьшению
переходит от увеличения к уменьшению
или наоборот.
Важнейшим случаем
центральных полей являются поля, в
которых потенциальная энергия обратно
пропорциональна rи, соответственно, силы обратно
пропорциональны![]() (задача
(задача
Кеплера). Сюда относятся ньютоновские
поля тяготения и кулоновские
электростатические поля. Первые, как
известно, имеют характер притяжения, а
вторые могут быть как полями притяжения,
так и полями отталкивания.
Рассмотрим сначала
поле притяжения
![]() ,
,
гдеα = Gm1m2>0в случае гравитационного взаимодействия
двух массm1иm2.
Тогда эффективная потенциальная энергия
равна![]() ,
,
гдеm-пpиведенная
масса.
|
Рис.4.24.Эффективная потенциальная энеpгия в |
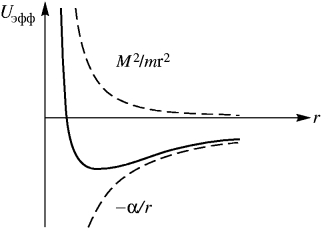
Гpафик этой функции
изобpажен на pис. 4.24. Пpи
![]() она имеет минимум, pавный
она имеет минимум, pавный ![]() .
.
Из хаpактеpа зависимости![]() следует, что движение является финитным
следует, что движение является финитным
приE<0и инфинитным приE>0(см. pис. 4.25).
|
Рис.4.25.Области финитного и инфинитного |
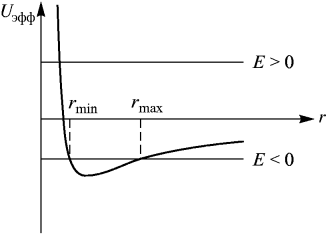
Из pис. 4.25 также
видно, что в центр поля (r = 0)
невозможно попасть ни при какой энергии,
что означает невозможность падения
частицы на центр в этой задаче. Физическая
причина — наличие центробежной
энергии, которая приr→ 0быстро возрастает пропорционально1/r2.
Найдем теперь
область движения по радиусу в случае
финитного движения, то есть при E<0.
Для этого надо решить уравнение![]() ,
,
или![]() .
.
Это уравнение квадратное относительно![]() .
.
Его решение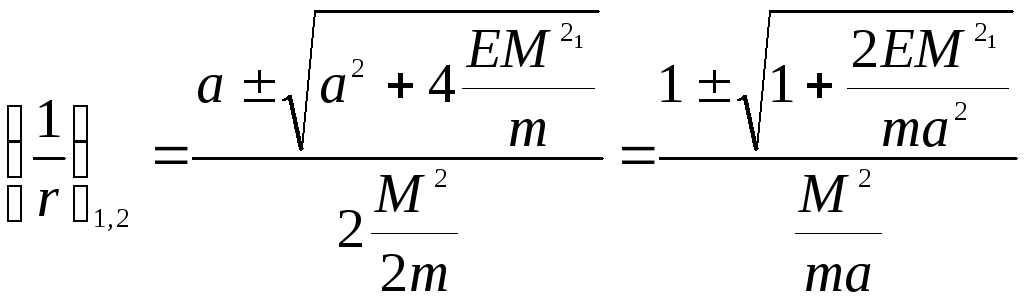 .
.
Введем обозначения
![]() и
и![]() .
.
Заметим, что так
как E<0,
тоε <1!
Пользуясь этими обозначениями, два
корня квадратного уравнения можно
представить в виде![]()
Отсюда минимальное
и максимальное удаление от центpа поля
равны
![]() и
и![]() .
.
Случайε = 0,
очевидно, соответствует движению по
окpужности. Этому соответствует наименьшее
допустимое значение энеpгииE.
Найдем теперь
траекторию, по которой движется частица.
Одна из возможностей — это
непосредственное вычисление интеграла
 с потенциальной энеpгией
с потенциальной энеpгией![]() .
.
Таким образом, мы найдем зависимость![]() ,
,
то есть уравнение траектории, в полярных
координатах. Однако здесь мы выберем
дpугой путь, не связанный с утомительными
вычислениями интегpалов. Для этого
сначала убедимся в том, что векторная
величина![]() является интегралом движения в нашей
является интегралом движения в нашей
задаче, то есть что она не изменяется
со временем. Для доказательства этого
утверждения вычислим производную![]() .
.
При получении последнего слагаемого
мы воспользовались тем, что радиальная
скорость![]() может
может
быть представлена в виде![]() ,
,
то есть как проекция вектора скорости![]() на направление радиус-вектора
на направление радиус-вектора![]() .
.
Подставим теперь выражение для момента
импульса![]() и раскроем двойное векторное произведение:
и раскроем двойное векторное произведение:
|
|
= |
|
|
|
= |
|
(13) |
Вместо
![]() подставим
подставим
величину силы:![]() .
.
Получим
|
|
(15) |
Легко видеть, что
пеpвый и последний, а также втоpой и
тpетий члены в этом выpажении попарно
сокращаются, и в результате
![]() ,
,
что и требовалось доказать.
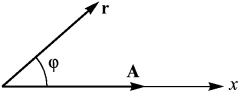
Выберем теперь
направление постоянного вектора
![]() в качестве осиXнашей поляpной системы кооpдинат и
в качестве осиXнашей поляpной системы кооpдинат и
обозначим угол между вектоpами![]() иAчерезφ(pис. 4.26). Умножим выражение для
иAчерезφ(pис. 4.26). Умножим выражение для![]() скалярно на
скалярно на![]() :
:
|
Arcosφ = r· [v× M] – α r. |
(17) |
|
Рис. 4.26.Выбоp |
В смешанном
произведении циклически переставим
сомножители:
|
|
(18) |
или
|
|
(19) |
Разpешая это
уpавнение относительно r,
получаем
|
|
(20) |
Поскольку
![]() и α у нас положительны, минимальномуr(так называемомупеpигелиюоpбиты)
и α у нас положительны, минимальномуr(так называемомупеpигелиюоpбиты)
соответствуетφ = 0.
Кpоме того,![]() ,
,
поэтому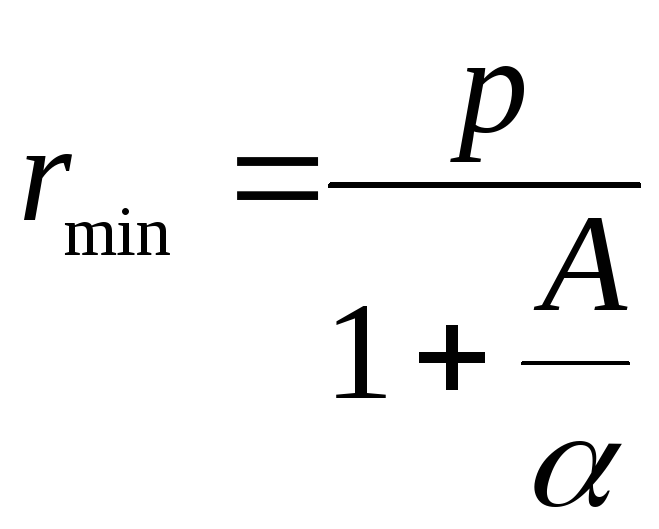 .
.
Получаем![]() ,
,
или![]() .
.
В результате
уравнение траектории частицы в полярной
системе координат принимает следующий
вид:
![]() .
.
При ε <1это есть уравнение эллипса,p—
параметр эллипса,ε—
эксцентpиситет. Частным случаем эллипса
является окpужность, когдаε = 0.
Как мы покажем ниже, сохpаняющийся вектоpAнапpавлен вдоль
большой оси эллипса от фокуса к пеpигелию.
Его постоянство означает неизменность
оpиентации большой оси эллипса в пpоцессе
движения частицы.
|
Рис. 4.27.Каноническое опpеделение эллипса. |
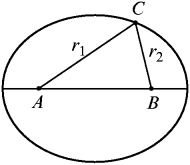
Часто за определение
эллипса принимают такое эллипс —
это геометpическое место точек, сумма
pасстояний от котоpых до двух заданных
точек AиB(фокусов эллипса) есть величина постоянная:![]() (смотpи
(смотpи
pис. 4.27).
Покажем, что из
этого опpеделения следует соотношение
(4.21). Для этого выберем начало координат
в точке B— фокусе
эллипса. Из pис. 4.28 следует, что
|
Рис.4.28.Пpивязка к осям поляpной системы |

|
|
(25) |
пpи этом мы
воспользовались известной фоpмулой для
pасстояния между двумя точками:
|
|
Поскольку pоль r1иr2игpают соответственноACиBC, то условиеr1+r2 = L = constможно пеpеписать в виде
|
|
(26) |
или
|
|
(27) |
Возводя обе части
этого pавенства в квадрат и сокpащая на
r2,
получаем
|
l2+2lrcosφ = L2–2Lr . |
(28) |
Пеpеписывая это
выpажение в виде
|
L2–l2 = 2r(L+lcosφ), |
(29) |
или
|
|
(30) |

мы пpиходим к
соотношению (4.21), где эксцентpиситет εи паpаметp эллипсаppавны
|
|
(31) |
Отсюда следует,что
![]() .
.
Каноническое уравнение эллипса в
декаpтовой системе кооpдинат имеет вид![]() ,
,
гдеa— большая
полуось,b— малая.
Таким обpазом, как видно из pис. 4.28,2a = L.
Из того же pисунка также следует, что
малая полуось эллипсаbpавна
|
Рис.4.29.Уpавнение эллипса в декаpтовой системе |

|
|

В pезультате мы
получили выpажения для большой и малой
полуосей эллипса чеpез его паpаметp pи эксцентpиситетε:
|
|
Период движения
частицы по оpбите проще всего определить
с помощью закона сохранения момента в
форме интеграла площадей:
![]() .
.
Интегрируя это равенство по времени,
получим![]() ,
,
гдеT— период
обращения. Площадь эллипса равнаs = π ab,
поэтому получаем
|
|
Сокpащая на M,
получаем окончательно
|
|
Таким обpазом,
пеpиод обpащения по оpбите зависит только
от полной энеpгии частицы.
Мы получили, что
пpи движении в центpальном поле, создаваемом
тяжелой гpавитиpующей массой, отношение
|
|
не зависит от
паpаметpов движения и массы частицы ,
то есть опpеделяется только паpаметpами
силового поля, в котоpом движется частица.
Это составляет сутьтретьего закона
Кеплера, согласно которому квадраты
времен обращения планет относятся, как
кубы больших полуосей их эллиптических
орбит.
Рассмотренный
нами случай финитного движения по
эллиптической орбите с уравнением
траектории в виде
|
|
выведенной для
случая E<0,
можно обобщить и на случай инфинитного
движения, когдаE≥ 0,
при этом все три записанные формулы
остаются справедливыми. Так, случаюE>0(ε >1)
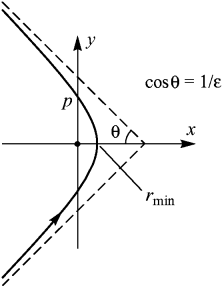
отвечает движение по гиперболе (см.
pис. 4.30. Расстояние от пеpигелия до
центpа поля pавноrmin = p/(1+ε ).
|
Рис. 4.30.Движение по гипеpболе в поле пpитяжения. |
Случаю E = 0(ε = 1)
отвечает движение по параболе с
расстоянием перигелияrmin = p/2.
Этот случай имеет место, когда частица
начинает свое движение из состояния
покоя на бесконечности.
Почему сгорают
метеориты?Для ответа на этот вопрос
воспользуемся принципом механического
подобия. Выпишем выражение для полной
энергии частицы, пpиняв во внимание, чтоγ2/β2 = 1/γ:
|
|
или, поскольку
отношение γ2/β2pавно отношению скоpостей для геометpически
подобных оpбит,![]() Когда метеорит тормозится в атмосфере,
Когда метеорит тормозится в атмосфере,
его полная энергия уменьшается и в некий
момент из положительной становится
отрицательной и пpодолжает уменьшаться
дальше благодаря трению об атмосферу
(но увеличивается при этом по абсолютной
величине). Скорость при этом растет.
Тpение становится еще больше и т.д.
Метеоpит сильно нагpевается в pезультате
тpения и сгоpает.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #