Траектория движения в физике, теория и онлайн калькуляторы
Траектория движения
Определение и основные понятия траектории движения
Во многих задачах интерес представлю не только перемещения материальных точек в пространстве, но и траектории их движения.
Определение
Линию, которую описывает частица при своем движении, называется траекторией движения.
В зависимости от формы траектории механическое движение можно разделить на:
- прямолинейное движение, траекторией движения точки в этом случае является прямая линия;
- и криволинейное перемещение (траектория — кривая линия).
Форма траектории зависит от выбора системы отсчета. В разных системах отсчета траектории могут быть представлены разными линиями, могут быть прямыми и кривыми.
При движении точки с постоянным ускорением, которое описывает уравнение:
[overline{r}left(tright)={overline{r}}_0+{overline{v}}_0t+frac{overline{a}t^2}{2}left(1right),]
(где $overline{r}left(tright)$ — радиус-вектор точки в момент времени $t$; ${overline{v}}_0$ — начальная скорость движения точки; $overline{a}$ — ускорение точки,) траектория движения представляет собой плоскую кривую, что означает все точки этой кривой находятся в одной плоскости. Положение этой плоскости в пространстве задают векторы ускорения и начальной скорости. Ориентацию координатных осей чаще всего выбирают так, чтобы плоскость движения совпадала с одной из координатных плоскостей. В этом случае векторное уравнение (1) можно свести к двум скалярным уравнениям.
Уравнение траектории движения
Рассмотрим свободное движение тела около поверхности Земли. Начало координат разместим в точке бросания тела (рис.1). Оси координат направим так, как изображено на рис.1.
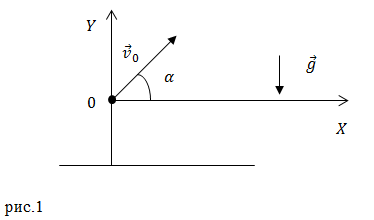
Тогда уравнение движения тела (1) в проекциях на координатные оси декартовой системы координат принимает вид системы из двух уравнений:
[left{ begin{array}{c}
x=v_0t{cos alpha left(2right), } \
y=v_0t{sin alpha }-frac{gt^2}{2}left(3right). end{array}
right.]
Для того чтобы получить уравнение траектории движения тела ($y=y(x)$) следует исключить время движения тела из уравнений (2) и (3). Выразим из уравнения (2) $t$ и подставим его в выражение (3), получим:
[t=frac{x}{v_0{cos alpha }}; y=v_0frac{x}{v_0{cos alpha }}{sin alpha }-frac{g}{2}{left(frac{x}{v_0{cos alpha }}right)}^2to y=x tg alpha -frac{gx^2}{2v^2_0{cos}^2alpha }left(4right).]
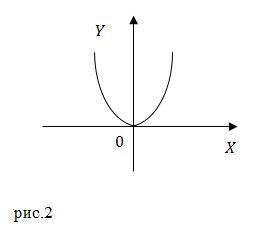
Выражение (4) это уравнение параболы, проходящей через начало координат. Ее верви направлены вниз, так как коэффициент при $x^2$ меньше нуля.
Вершина этой параболы находится в точке с координатами:
[left{ begin{array}{c}
x=frac{v^2_0{sin alpha {cos alpha } }}{g} \
y=frac{v^2_0{sin}^2alpha }{2g} end{array}
right.left(5right).]
Найти координаты вершины траектории можно при помощи известных правил исследования функций на экстремум. Так, положение максимума функции $y(x)$ определяют, приравнивая к нулю первую производную ($frac{dy}{dx}$) от нее по $x$.
Обратимость движения
Из представления о траектории можно конкретизировать смысл обратимости механического движения.
Пусть частица движется в силовом поле таком, что ее ускорение в любой точке обладает определенной величиной, не зависящей от скорости. Как будет двигаться эта частица, если, в какой то точке ее траектории направление скорости заменить противоположным? С точки зрения математики это эквивалентно замене $t $ на $-t$ для всех уравнений. Уравнение траектории время не содержит, получается, что частица будет перемещаться «вспять» по той же самой траектории. При этом отрезки времени между любыми точками траектории будут одинаковы при прямом и обратном движении. Всякой точке траектории ставится в соответствие определенное значение величины скорости независимо от направления движения по данной траектории. Данные свойства наглядны в колебательных движениях маятника.
Все сказанное выше справедливо тогда, когда можно пренебречь любым сопротивлением движению. Обратимость движения существует, когда выполняется закон сохранения механической энергии.
Параметры траектории движения
Положение точек системы отсчета можно определять при помощи разных способов. В соответствии с этими способами описывают и движение точки или тела:
- Координатная форма описания движения. Выбирается система координат, в ней положение точки характеризуют тремя координатами (в трехмерном пространстве). Это могут быть координаты $x_1=x,x_2=y,x_3=z$, в декартовой системе координат. $x_1=rho ,x_2=varphi ,x_3= z$ в цилиндрической системе и т.д. При перемещении точки координаты являются функциями времени. Описать движение точки — это значит указать эти функции:
- При описании движения в векторной форме положение материальной точки задает радиус-вектор ($overline{r}$) по отношению к точке, которую принимают начальной. В этом случае вводят точку (тело) отсчета. При перемещении точки вектор $overline{r}$ постоянно изменяется. Конец этого вектора описывает траекторию. Движение задает выражение:
- Третьим способом описания движения является описание с помощью параметров траектории.
[x_1=x_1left(tright);; x_2=x_2left(tright);; x_3=x_3left(tright)left(6right).]
[overline{r}=overline{r}left(tright)left(7right).]
Путь — это скалярная величина, равная длине траектории.
Если траектория задана, то задачу описания движения сводят к определению закона движения вдоль нее. При этом выбирается начальная точка траектории. Любая другая точка характеризуется расстоянием $s$ по траектории от начальной точки. В таком случае движение описывают выражением:
[s=sleft(tright)left(8right).]
Пусть по окружности радиуса R равномерно перемещается точка. Закон движения точки по окружности в рассматриваемом методе запишем как:
[s=Atleft(9right),]
где $s$ — путь точки по траектории; $t$ — время движения; $A$ — коэффициент пропорциональности. Известными являются окружность и точка начала движения. Отсчет положительных величин $s$ совпадает с направлением перемещения точки по траектории.
Знание траектории движения тела во многих случаях существенно упрощает процесс описания движения тела.
Примеры задач с решением
Пример 1
Задание: Точка движется в плоскости XOY из начала координат со скоростью $overline{v}=Aoverline{i}+Bxoverline{j} , $где $overline{i}$, $overline{j}$ — орты осей X и Y; $A$,B — постоянные величины. Запишите уравнение траектории движения точки ($y(x)$). Изобразите траекторию. textit{}
Решение: Рассмотрим уравнение изменения скорости частицы:
[overline{v}=Aoverline{i}+Bxoverline{j} left(1.1right).]
Из этого уравнения следует, что:
[left{ begin{array}{c}
v_x=A, \
v_y=Bx end{array}
right.left(1.2right).]
Из (1.2) имеем:
[dx=v_xdt=Adtto dt=frac{dx}{A};;dy=v_ydt=Bxdtto dy=Bxfrac{dx}{A} left(1.3right).]
Для получения уравнения траектории следует решить дифференциальное уравнение (1.3):
[y=intlimits^x_0{frac{B}{A}}xdx=frac{B}{2A}x^2.]
Мы получили уравнение параболы, ветви которой направлены вверх. Эта парабола проходит через начало координат. Минимум этой функции находится в точке с координатами:
[left{ begin{array}{c}
x=0 \
y=0. end{array}
right.]
Пример 2
Задание: Движение материальной точки в плоскости описывает система уравнений: $left{ begin{array}{c}
x=At. \
y=At(1+Bt) end{array}
right.$, где $A$ и $B$ — положительные постоянные. Запишите уравнение траектории точки.
Решение: Рассмотрим систему уравнений, которая задана в условии задачи:
[left{ begin{array}{c}
x=At. \
y=Atleft(1+Btright) end{array}
right.left(2.1right).]
Исключим время из уравнений системы. Для этого из первого уравнения системы выразим время, получим:
[t=frac{x}{A}left(2.2right).]
Подставим вместо $t$ правую (2.2) часть во второе уравнение системы (2.1), имеем:
[y=Atleft(1+Btright)=At+ABt^2=Afrac{x}{A}+AB{(frac{x}{A})}^2=x+frac{B}{A}x^2.]
Ответ: $y=x+frac{B}{A}x^2$
Читать дальше: ускорение тела.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Содержание:
- Кинематика — основные понятия и определения
- Кинематика точки
- Способы задавания движения точки
- Векторный способ
- Координатный способ
- Натуральный способ
- Связь между различными способами задавания движения точки
- Скорость движения точки
- Определение скорости точки в случае задавания ее движения векторным способом
- Определение скорости точки в случае задавания ее движения координатным способом
- Скорость движения точки в декартовых координатах
- Скорость движения точки в полярных координатах
- Скорость точки с натурального способа задания ее движения
- Годограф скорости точки
- Ускорение движения точки
- Ускорение точки с векторного способа задания ее движения
- Ускорение точки при задании ее движения координатным способом
- Ускорение точки с натурального способа задавания ее движения
- Отдельные случаи движения точки
- Примеры на определение кинематических характеристик движения точки
- Задачи по кинематике с решениями и примерами
- Кинематика точки и её задачи
- Порядок решения задач по кинематике точки
- Примеры решения задач по кинематике точки с решением
- Задания темы К1
- К1.6. Пример решения задания темы К1
- Кинематика — полная лекция с формулами и теорией с примерами
- Кинематика точки
- Траектория и уравнения движения точки
- Координатный способ описания движения точки
- Определение траектории точки при координатном способе описания ее движения
- Определение скорости и ускорения точки при координатном способе описания ее движения
- Порядок решения задач по кинематике точки
- Естественный способ описания движения точки
- Определение скорости и ускорения точки при естественном способе описания ее движения
- Краткие исторические сведенья про развитие кинематики
- Введение в кинематику
- Три способа задания движения точки
- Векторный способ
- Координатный способ
- Натуральный способ
- Скорость движения точки
- Скорость точки в прямоугольной декартовой системе координат
- Скорость точки в полярных координатах
- Скорость точки при натуральном способе заданный движения
- Секторная скорость
- Ускорение точки
- Определение ускорения в прямоугольной декартовой системе координат
- Ускорение точки в полярных координатах
- Ускорение точки при натуральном способе задания движения
- Отдельные случаи движения точки
- Криволинейные координаты. Коэффициенты Ламе
- Скорость и ускорение точки в криволинейных координатах
- Основные понятия кинематики
- Кинематика материальной точки
- Способы задания движения материальной точки
- Векторный способ задания движения материальной точки
- Траектория движения точки
- Скорость движения точки
- Ускорение движения точки
- Координатный способ задания движения материальной точки
- Траектория движения точки
- Скорость движения точки
- Ускорение движения точки
Кинематика — это раздел механики, изучающий математическое описание движения идеализированных тел, без рассмотрения причин движения. Исходные понятия кинематики — пространство и время. Например, если тело движется по окружности, то кинематика предсказывает необходимость существования центростремительного ускорения без уточнения того, какую природу имеет сила, его порождающая. Причинами возникновения механического движения занимается другой раздел механики — динамика.
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Кинематика — основные понятия и определения
Кинематикой называется раздел теоретической механики, в котором изучается механическое движение материальных объектов (точек и тел) без связи с причинами, которые вызывают это движение (не учитывается масса подвижного тела и силы, которые вызывают его движение).
Итак, в кинематике изучается механическое движение с геометрической точки зрения. Название «кинематика» происходит от греческого слова «кинема», что означает движение.
Под механическим движением понимается изменение положения одного твердого тела с течением времени по отношению к любому другому телу, которая происходит в пространстве. Это означает, что при изучении движения тела или точки мы должны указать, в отношении которого другого тела рассматриваем движение, то есть связать с последним систему отсчета и считать ее условно неподвижной. Выбор системы отсчета в кинематике произвольный и определяется целью исследования.
Движение одних тел относительно других происходит в пространстве и времени. Пространство в классической механике является абсолютным: оно везде непрерывное, однородное и изотропное , то есть свойства пространства в различных его точках одинаковы, а в каждой точке — одинаковые во всех направлениях.
Геометрические свойства пространства определяются системой аксиом и теорем Евклида. Пространство рассматривается трехмерным, в нем существует понятие о расстоянии между двумя точками или длины отрезка прямой. За единицу длины в системе СІ принято метр (м). Эталон метра был изготовлен в 1795 французским механиком Борда и сохраняется в Севре близ Парижа. Одна из копий международного стандарта метра находится в Палате мер в Москве.
Время в классической механике считается универсальным, то есть одинаковым в любых системах отсчета и независимым от движения одних систем отсчета относительно других. Время является скалярной непрерывно переменной величиной. За единицу времени принимается секунда (с), которая равна примерно 1/86 400 части средней земных суток (земные сутки — это период обращения Земли вокруг собственной оси и равна 24 ч.). При измерении времени в кинематике различают такие понятия, как начальный момент времени, промежуток времени, момент времени. Отсчет времени ведется от некоторого начального момента времени, выбор которого в каждой задачи оговаривается. Время,
проходит между двумя физическими явлениями, называется промежутком времени.
Граница между двумя смежными промежутками времени называется моментом времени.
Понятие об абсолютном пространстве и абсолютное (универсальное) время введено в науку основоположником классической механики И. Ньютоном в знаменитом труде «Математические начала натуральной философии» (1687). Согласно ньютоновской теории пространство и время существуют объективно, независимо друг от друга и не зависят от свойств движущейся материи.
В начале ХХ в. появляется релятивистская механика, основанная на теории относительности. Теория относительности развита в научных трудах Дж. К. Максвелла (1831-1879), Х. А. Лоренца (1853-1928), А. Пуанкаре (1854-1912) и А. Эйнштейна (1879-1955). Принципы теории относительности корне меняют понятие о пространстве и времени. Абстрактному пространству противопоставляется физическое пространство, в котором геометрические свойства пространства и свойства времени сочетаются со свойствами движущейся материи. Время не является универсальным, а имеет «местное» значение. Универсальной постоянной величиной для всех систем является скорость света. Однако
релятивистская механика не исключает классическую механику, а лишь указывает на ее ограниченность и несправедливость ее законов там, где скорость движения тела соизмерима со скоростью света.
Итак, евклидово пространство и универсальное время, принятые в классической механике, лишь приближенно отражают реальные свойства пространства и времени. Однако, как показывает опыт, для тел, скорости движения которых незначительны по сравнению со скоростью света, это приближение дает вполне достаточную для практики точность.
В кинематике используются понятия материальной точки, системы материальных точек, абсолютно твердого тела, которые были введены в статике. Понятие материальной точки и геометрической точки в кинематике совпадают, поскольку масса точки не учитывается. Поэтому в дальнейшем будем употреблять термин «точка». Кроме этих понятий, в кинематике следует различать между собой такие понятия, как перемещение и движение.
Перемещением точки или тела называется переход его в пространстве с одного положения в другое произвольным способом за определенный промежуток времени.
Перемещение полностью определяется начальным и конечным положением точки или тела и промежутком времени. Движением называется переход точки или тела из одного положения в другое определенным способом и в определенной зависимостю от времени. Это означает, что любому положению точки или тела в пространстве соответствует определенный момент времени. Эта связь между положением точки или тела в пространстве и времени определяется законом движения. Если можно определить положение точки или тела в пространстве в любой момент времени, то считается известным закон ее движения.
Основная задача кинематики заключается в том, чтобы, зная закон движения точки или тела, установить основные кинематические характеристики движения. К основным кинематическим характеристикам движения относятся траектории, скорости и ускорения точек тела, а также угловая скорость и угловое ускорение тела. Кинематика делится на кинематику точки и кинематику твердого тела. Изучение кинематики начинается с изучение движения отдельной точки, а затем изучают движение твердого тела.
Кинематика точки
Кинематика точки — раздел кинематики, изучающий математическое описание движения материальных точек. Основной задачей кинематики является описание движения при помощи математического аппарата без выяснения причин, вызывающих это движение.
Способы задавания движения точки
Задать движение точки — это значит установить совокупность таких параметров, с помощью которых можно однозначно определить положение точки в пространстве в любой момент времени.
Движение точки в пространстве можно задать тремя способами: векторным, координатным и натуральным.
Векторный способ

Положение точки в пространстве в каждый момент времени можно определить с помощью
радиус-вектора  проведенного с неподвижной точки О пространства в движущуюся точку М.
проведенного с неподвижной точки О пространства в движущуюся точку М.
Каждому моменту времени t, а следовательно, и положению точки М, соответствует определенное значение радиусавектора  то есть радиус-вектор является векторной
то есть радиус-вектор является векторной
функцией времени 
Уравнение (2.1) называют векторным уравнением движения точки. Оно одновременно является и уравнением траектории точки М.
Траекторией движения точки называется геометрическое место последовательных
положений подвижной точки в пространстве. В данном случае это будет геометрическое место концов радиус-вектора  точки М, то есть годограф радиусавектора
точки М, то есть годограф радиусавектора  . Следовательно, при векторном способе задавания движения точки траектории точки являются годограф радиус-вектора
. Следовательно, при векторном способе задавания движения точки траектории точки являются годограф радиус-вектора  .
.
Векторный способ задавания движения точки преимущественно применяется при теоретических исследованиях.
Координатный способ

Положение точки по отношению к любой системе отсчета полностью определяется ее координатами. Если задать координаты точки как известные функции времени в некоторой системе отсчета, то это дает определить ее положение в пространстве в произвольный момент времени. Таким образом задания движения точки называется координатным.
Рассмотрим движение точки в декартовой системе координат. Положение точки М в пространстве будет известным, если задано значение трех ее декартовых координат  (рис. 2.2). Каждому моменту времени t соответствуют определенные значения координат точки
(рис. 2.2). Каждому моменту времени t соответствуют определенные значения координат точки  Чтобы определить положение точки в пространстве в произвольный момент времени, нужно задать зависимости
Чтобы определить положение точки в пространстве в произвольный момент времени, нужно задать зависимости

Уравнение (2.2) являются уравнениями движения точки в координатной форме и
одновременно параметрическими уравнениями траектории точки. Исключив параметр t из этих уравнений, получим уравнение траектории движения точки в координатной форме.
Если точка движется в плоскости, то, приняв ее за плоскость будем иметь два уравнения движения
будем иметь два уравнения движения

В случае прямолинейного движения точки положения ее определяется одним уравнением

при условии, что ось  совпадает с траекторией точки.
совпадает с траекторией точки.

Если движение точки происходит в плоскости, то иногда целесообразно использовать полярную систему координат (рис. 2.3). Для этого из телом отсчета свяжем полярную ось  Положение точки М будет известным, если заданы ее полярные координаты: радиус
Положение точки М будет известным, если заданы ее полярные координаты: радиус  и полярный угол φ между полярной осью и направлением ОМ. Уравнения движения точки М задаются зависимостями
и полярный угол φ между полярной осью и направлением ОМ. Уравнения движения точки М задаются зависимостями

Полярный угол φ считается положительным, если его отчисляют от полярной оси  к радиусу r против часовой стрелки. Радиус r, как расстояние от точки О до точки М, имеет только положительное значение. Формулы, связывающие полярные координаты с декартовыми, имеют вид
к радиусу r против часовой стрелки. Радиус r, как расстояние от точки О до точки М, имеет только положительное значение. Формулы, связывающие полярные координаты с декартовыми, имеют вид

Координатный способ определения движения точки применяют как во время теоретических исследований, так и при решении конкретных задач.
Кроме декартовой и полярной систем координат в механике часто применяют еще и такие системы, как цилиндрическая и сферическая.
Натуральный способ
Пусть точка М описывает в пространстве некоторую кривую АВ (рис. 2.4), которая является траекторией точки. Для того, чтобы определить положение точки М на траектории в произвольный момент времени, выберем на ней начало отсчета О и установим положительный и отрицательный направления движения.

Тогда положение точки М на траектории однозначно определится криволинейной координатой  , которая называется дуговой координатой.
, которая называется дуговой координатой.
Каждому моменту времени соответствует определенное положение точки М на траектории, а следовательно, и определенное значение дуговой координаты, то есть,
дуговая координата является функцией времени

Уравнение (2.7) выражает закон движения точки М по траектории, но не определяет положение ее в пространстве.
Итак, по натуральному способу определения движения точки положения ее в пространстве задается совокупностью следующих параметров: траекторией точки, началом отсчета дуговой координаты, направлением положительного отсчета дуговой координаты, законом движения по траектории в виде (2.7).
Не следует утотожнюваты значение дуговой координаты с пройденным точкой путем. На рис. 2.5, а точка в начальный момент времени  находилась в положении
находилась в положении  а в момент времени t — в положении М.
а в момент времени t — в положении М.

Значение дуговой координаты  , а пройденный точкой путь
, а пройденный точкой путь  Значение дуговой координаты и пройденный точкой путь совпадают только тогда, когда движение точки начинается с начала отсчета О и происходит в одном направлении по незапертой траектории (рис. 2.5, б).
Значение дуговой координаты и пройденный точкой путь совпадают только тогда, когда движение точки начинается с начала отсчета О и происходит в одном направлении по незапертой траектории (рис. 2.5, б).
Заметим, что функции, которые входят в равенства (2.1), (2.2), (2.5), (2.7), по самой природе движения должны быть однозначными, непрерывными и хотя бы дважды дифференцированными.
Связь между различными способами задавания движения точки
Между различными способами задания движения точки существует взаимосвязь. Установим его между векторным и координатным способами.
Пусть задано векторное уравнение движения точки (2.1), где радиус-вектор  отложенный от недвижимого центра А. Выберем декартову систему координат, начало которой совместим с центром О (рис. 2.6).
отложенный от недвижимого центра А. Выберем декартову систему координат, начало которой совместим с центром О (рис. 2.6).

Тогда координаты точки М равны проекциям радиус-вектора  этой же точки на координатные оси
этой же точки на координатные оси

Если же, наоборот, задано уравнение (2.2), а нужно составить векторное уравнение, то, введя орты координатных осей (рис. 2.6), получим
(рис. 2.6), получим

Покажем, что существует связь между координатным и натуральным способами определения движения точки. Пусть движение точки задано уравнениями (2.2), которые одновременно являются и параметрическими уравнениями траектории. Исключив из них параметр t, получим уравнение траектории. Решая, например, последнее уравнение
системы (2.2) по t, получим  Подставляя это соотношение в первые два уравнения, получим
Подставляя это соотношение в первые два уравнения, получим

Как известно из аналитической геометрии, линии в пространстве отвечают два уравнения с тремя координатами, то есть уравнение (2.10) являются уравнениями траектории точки в декартовых координатах.
Установим закон движения по траектории. Пусть за промежуток времени dt произошел прирост дуговой координаты dS, равный дифференциала длины дуги S. По известным формулам дифференциальной геометрии элемент дуги dS исчисляется
 где
где  дифференциалы координат точки, определяемые
дифференциалы координат точки, определяемые 
Тогда 
Замечания. В механике производная по времени обозначается точкой над функцией. Например,
Интегрируя выражение (2.11) в промежутке от  до бегущей значение t, получим закон движения точки по траектории
до бегущей значение t, получим закон движения точки по траектории 
Знак «плюс» или «минус» перед интегралом ставится в зависимости от направления движения точки: если точка движется в сторону выбранного положительного направления отсчета дуговой координаты, то ставится знак «плюс», в противном случае — «минус». Начало отсчета дуговой координаты совпадает с начальным положением точки на траектории.
Скорость движения точки
Одной из основных кинематических характеристик движения точки является ее скорость. Скоростью точки называется векторная величина, которая характеризует в каждый момент времени изменение положения и направление движения точки в данной системе отсчета.
Определим скорость точки при различных способах задания ее движения.
Определение скорости точки в случае задавания ее движения векторным способом
Пусть в момент времени t положение точки М определяется радиусомвектором  а в момент
а в момент  радиусом-вектором
радиусом-вектором  (рис. 2.7). Тогда перемещение точки за промежуток времени
(рис. 2.7). Тогда перемещение точки за промежуток времени  определится вектором
определится вектором  который будет направлен по хорде
который будет направлен по хорде 

Из рис. 2.7 видно, что  то есть вектор
то есть вектор  перемещения точки М является приростом
перемещения точки М является приростом  радиус-вектора
радиус-вектора  за промежуток времени
за промежуток времени 
Введем понятие о средней скорости точки за некоторый промежуток времени. Отношение вектора перемещения  к промежутку времени
к промежутку времени  за который произошло это перемещение, называется средней скоростью точки
за который произошло это перемещение, называется средней скоростью точки

Вектор  совпадает по направлению с вектором
совпадает по направлению с вектором  Очевидно, что чем меньший промежуток
Очевидно, что чем меньший промежуток  тем точнее средняя скорость
тем точнее средняя скорость  будет характеризовать движение точки. Чтобы получить действительную характеристику движения, введем понятие скорости точки в заданный момент времени. Скоростью точки в данный момент времени называется векторная величина, которая является границей, к которой следует
будет характеризовать движение точки. Чтобы получить действительную характеристику движения, введем понятие скорости точки в заданный момент времени. Скоростью точки в данный момент времени называется векторная величина, которая является границей, к которой следует  при
при  .
.

Итак, вектор скорости точки в заданный момент времени равен первой производной по времени от радиус-вектора точки

Поскольку при  точка
точка  приближается к точке М, а хорда
приближается к точке М, а хорда — до касательной, проведенной в точке к траектории движения, то и вектор скорости
— до касательной, проведенной в точке к траектории движения, то и вектор скорости  в заданный момент времени направляется по касательной к траектории в сторону движения точки. То есть, вектор скорости точки
в заданный момент времени направляется по касательной к траектории в сторону движения точки. То есть, вектор скорости точки  направленный по касательной к годографу радиус-вектора
направленный по касательной к годографу радиус-вектора 
Единицей измерения скорости в системе СІ является метр в секунду (м / с).
Определение скорости точки в случае задавания ее движения координатным способом
При координатном способе задания движения точки модуль и направление скорости находят через проекции ее на оси координат, согласно следующей теореме: проекции скорости точки на неподвижные оси равны первым производным от соответствующих координат точки по времени.
Скорость движения точки в декартовых координатах
Рассмотрим определение скорости точки в случае задавания ее движения координатным
способом в декартовой системе координат.
Пусть движение точки М задано в системе координат  уравнениями (2.2). Тогда, согласно с (2.9), имеем
уравнениями (2.2). Тогда, согласно с (2.9), имеем 

Учитывая, что орты 
 постоянные для выбранной системы координат по величине и направлению, скорость точки согласно (2.15) равна
постоянные для выбранной системы координат по величине и направлению, скорость точки согласно (2.15) равна 
С другой стороны, разложив вектор скорости  на компоненты по осям координат (рис. 2.8), получим
на компоненты по осям координат (рис. 2.8), получим 
где  проекции вектора скорости
проекции вектора скорости  на координатные оси.
на координатные оси.
Сравнивая формулы (2.16) и (2.17), находим 
Итак, проекции вектора скорости точки на оси декартовой системы координат равны первым производным по времени от соответствующих координат точки.
Как видно из рис. 2.8, модуль вектора скорости и его направляющие косинусы определяются по формулам

Формулы (2.18) и (2.19) аналитически определяют вектор скорости точки в декартовой системе координат.
Скорость движения точки в полярных координатах
Рассмотрим способ определения скорости точки, когда ее движение задано в полярных координатах уравнениями (2.5). Для этого введем единичные вектора:  который
который
направлен по радиусу ОМ от точки О до точки М, и  направление которого получим поворотом вектора
направление которого получим поворотом вектора  на угол
на угол  в направлении роста угла φ, то есть против хода
в направлении роста угла φ, то есть против хода
часовой стрелки (рис. 2.9).

Тогда  . Скорость точки согласно (2.15)
. Скорость точки согласно (2.15) 
Выразим векторы  и
и  через орты
через орты и
и  декартовых координат и полярный угол φ
декартовых координат и полярный угол φ

Найдем производные по времени от полученных выражений для  и
и

Тогда формула (2.20) принимает вид 
Выражение (2.22) является расписанием вектора скорости точки на две составляющие,
которые называются соответственно радиальной  и трансверсальной
и трансверсальной  скоростями (рис. 2.9)
скоростями (рис. 2.9)

где 
Проекции радиальной и трансверсальной скоростей на оси полярной системы координат, положительные направления которых совпадают с направлениями единичных векторов 
и  равны
равны

В зависимости от знаков производных  и
и  радиальная и трансверсальная скорости могут быть положительными и отрицательными. Модуль и направление вектора скорости точки найдем по формулам
радиальная и трансверсальная скорости могут быть положительными и отрицательными. Модуль и направление вектора скорости точки найдем по формулам

где  угол образованный вектором скорости
угол образованный вектором скорости  с положительным радиальным направлением.
с положительным радиальным направлением.
Скорость точки с натурального способа задания ее движения
Определим скорость движения точки, считая, что движение задано натуральным способом, то есть известные траектория движения, начало и направление отсчета дуговой координаты и уравнения движения точки по траектории  Положение точки на траектории определим соответствующим радиусом-вектором
Положение точки на траектории определим соответствующим радиусом-вектором  который будет функцией дуговой координаты (рис. 2.10), то есть
который будет функцией дуговой координаты (рис. 2.10), то есть 
Поскольку дуговая координата является функцией времени, то радиус-вектор  будет
будет
сложной функцией времени

Если за промежуток времени  точка переместится из положения
точка переместится из положения  в
в  то
то  есть приростом дуговой координаты, а
есть приростом дуговой координаты, а  является приростом радиусавектора
является приростом радиусавектора  который равный
который равный  На основании формул (2.14) и (2.26)
На основании формул (2.14) и (2.26)
вектор скорости  определится
определится

Рассмотрим векторную величину
Как известно из дифференциальной геометрии, предел отношения длины дуги до хорды, что стягивает ее, по модулю равен единице, а предельное положение хорды  совпадает с касательной к кривой в точке M, поэтому
совпадает с касательной к кривой в точке M, поэтому 
где  единичный вектор касательной к кривой, направленный в сторону увеличения дуговой координаты.
единичный вектор касательной к кривой, направленный в сторону увеличения дуговой координаты.
Действительно, при  вектор
вектор направленный в сторону увеличения дуговой
направленный в сторону увеличения дуговой
координаты (рис. 2.10, а), а при  вектор
вектор  направленный противоположно вектору
направленный противоположно вектору  (рис. 2.10, б). Итак, в обоих случаях направление вектора
(рис. 2.10, б). Итак, в обоих случаях направление вектора  не зависит от знака дуговой координаты и направляется в сторону увеличения дуговой координаты.
не зависит от знака дуговой координаты и направляется в сторону увеличения дуговой координаты.

Учитывая вышеизложенное, формулу (2.27) можно записать в виде 
Модуль (величина) скорости

Формула (2.27) определяет вектор скорости точки с натурального способа задания ее движения. Умножив скалярно почленно это равенство на вектор  получим
получим

или, поскольку 

Итак, производная  является проекцией вектора скорости на касательную к
является проекцией вектора скорости на касательную к
траектории и формулу (2.27) можно записать в виде 
Алгебраическое значение скорости точки — это проекция вектора скорости на касательную ось. Она определяется формулой (2.30).
Если  то точка движется в направлении роста дуговой координаты и направление скорости
то точка движется в направлении роста дуговой координаты и направление скорости  совпадает с направлением орта
совпадает с направлением орта  При
При  точка движется в направлении падения дуговой координаты и вектор скорости
точка движется в направлении падения дуговой координаты и вектор скорости противоположный направлению орта
противоположный направлению орта 
Годограф скорости точки
Пусть точка М движется по криволинейной траектории. скорость точки при этом будет меняться как по величине, так и по направлению. На рис. 2.11, а показан ряд положений точки М на траектории и ее скорости  в этих положениях.
в этих положениях.


Выберем произвольную неподвижную точку  в пространстве и перенесем к ней
в пространстве и перенесем к ней
параллельно самим себе векторы скоростей (рис. 2.11, б).Поскольку вектор  является непрерывной функцией времени, то в конце перенесенных векторов образуют кривую, которая называется годографом вектора скорости.
является непрерывной функцией времени, то в конце перенесенных векторов образуют кривую, которая называется годографом вектора скорости.
Итак, годографом скорости называется геометрическое место концов векторов скорости подвижной точки, отложенных от произвольной точки пространства.
Найдем уравнение годографа скорости. Для этого через неподвижную точку  проведем оси декартовой системы координат
проведем оси декартовой системы координат  (Рис. 2.12).
(Рис. 2.12).

Радиусом-вектором произвольной точки N на годограф будет вектор скорости  а координаты точки N равны проекциям вектора
а координаты точки N равны проекциям вектора  на оси координат:
на оси координат:

Параметрические уравнения годографа скорости точки запишем в виде:

Ускорение движения точки
Рассмотрим ускорение точки, которое также является одной из основных кинематических характеристик ее движения. Ускорением точки называется векторная величина, характеризующая изменение вектора скорости точки по величине и направлению с течением времени. Найдем ускорение точки при различных способах задания ее движения.
Ускорение точки с векторного способа задания ее движения
Пусть подвижная точка М в момент времени t имеет скорость  а в момент времени
а в момент времени и занимает положение
и занимает положение  (Рис. 2.13, а).
(Рис. 2.13, а).

Найдем прирост  вектора скорости за промежуток времени
вектора скорости за промежуток времени  Для этого перенесем к точке М вектор
Для этого перенесем к точке М вектор  оставляя неизменными его модуль и направление, и
оставляя неизменными его модуль и направление, и  найдем как разность векторов
найдем как разность векторов  и
и 

Отношение прироста вектора скорости  до времени
до времени  за который происходит этот прирост, называется вектором среднего ускорения точки за этот промежуток времени:
за который происходит этот прирост, называется вектором среднего ускорения точки за этот промежуток времени:

Формула (2.31) указывает на то, что вектор  имеет такой же направление, как и вектор
имеет такой же направление, как и вектор  Изобразим его на рис. 2.13, а в точке М. Видим, что вектор
Изобразим его на рис. 2.13, а в точке М. Видим, что вектор  направлен в сторону вогнутости траектории. Очевидно, что вектор среднего ускорения отражает изменение скорости тем точнее, чем меньшем промежутке времени он отвечает. Поэтому естественно рассмотреть границу, к которой приближается среднее ускорение
направлен в сторону вогнутости траектории. Очевидно, что вектор среднего ускорения отражает изменение скорости тем точнее, чем меньшем промежутке времени он отвечает. Поэтому естественно рассмотреть границу, к которой приближается среднее ускорение 
когда соответствующий промежуток времени  стремится к нулю. Эту границу называют ускорением точки в заданный момент времени:
стремится к нулю. Эту границу называют ускорением точки в заданный момент времени:

Зависимость (2.32) с учетом (2.15) запишем в виде

Итак, вектор ускорения точки в заданный момент времени равна первой производной по времени от вектора скорости точки, или второй производной по времени от радиус-вектора этой точки.
Установим направление вектора ускорения. Для этого построим годограф вектора скорости на рис. 2.13, б. Вектор среднего ускорения  направленный по хорде
направленный по хорде  Когда
Когда  то точка
то точка  приближается к точке N и секущая
приближается к точке N и секущая  совпадает в предельном положении с касательной к годографа скорости. Из этого следует, что вектор ускорения точки
совпадает в предельном положении с касательной к годографа скорости. Из этого следует, что вектор ускорения точки направляется по касательной к годографа скорости. Если этот вектор перенести на траекторию движения точки (рис. 2.13, а), то видно, что он направлен в сторону вогнутости траектории.
направляется по касательной к годографа скорости. Если этот вектор перенести на траекторию движения точки (рис. 2.13, а), то видно, что он направлен в сторону вогнутости траектории.
Стоит заметить, что приведенный выше способ нахождения направления ускорения представляет лишь теоретический интерес. во время практического решения задач пользуются удобными методами нахождения направления ускорения, которые будут приведены ниже. Единицей измерения ускорения в системе СІ является метр в секунду в
квадрате 
Ускорение точки при задании ее движения координатным способом
1. Ускорение движения точки в декартовых координатах
Определим ускорение точки в декартовой системе координат.

Пусть движение точки М задано в системе координат (рис. 2.14) уравнениями
(рис. 2.14) уравнениями
 Запишем выражение для радиуса-вектора движущейся точки
Запишем выражение для радиуса-вектора движущейся точки 
На основании (2.33) и, учитывая, что векторы  имеем
имеем 
Разложим вектор  на составляющие по осям координат
на составляющие по осям координат
где  проекции вектора ускорения на оси координат.
проекции вектора ускорения на оси координат.
Сравнивая (2.34) и (2.35), получим
Учитывая (2.18), формулы (2.36) можно записать в виде 
Итак, проекции вектора ускорения на декартовы оси координат равны вторым производным по времени от соответствующих координат точки или первым производным по времени от проекций скорости на соответствующие оси.
Модуль вектора ускорения и его направляющие косинусы определяются по формулам 
2. Ускорение движения точки в полярных координатах
Пусть движение точки М в плоскости задано в полярных координатах  Используя равенство (2.22), определим ускорение точки в полярных координатах
Используя равенство (2.22), определим ускорение точки в полярных координатах

Но согласно (2.21)

Учтя выражения этих производных в формуле (2.39) и сведя подобные слагаемые, получим выражение для ускорения точки 
Из формулы (2.40) видно, что проекции ускорения на радиальный и трансверсально направления соответственно равны

Поскольку  и
и  взаимно перпендикулярны, то модуль полного ускорения найдем по формуле
взаимно перпендикулярны, то модуль полного ускорения найдем по формуле 
Для определения направления вектора ускорения найдем угол γ, образованный вектором  с положительным радиальным направлением
с положительным радиальным направлением

Ускорение точки с натурального способа задавания ее движения
Прежде чем перейти к определению ускорения точки с натурального способа задания ее движения, напомним некоторые положения дифференциальной геометрии, касающихся теории кривых в трехмерном пространстве.
1. Натуральная система координат

На пространственной кривой АВ, которая является траекторией движения точки, рассмотрим два близкие положение точки  и
и  (Рис. 2.15). Проведем в этих точках
(Рис. 2.15). Проведем в этих точках
касательные к кривой, орты которых обозначим соответственно  и
и  Перенесем вектор
Перенесем вектор
 параллельно самому себе в точку М и через векторы
параллельно самому себе в точку М и через векторы  и
и  проведем плоскость І. Предельное положение этой плоскости при приближении точки
проведем плоскость І. Предельное положение этой плоскости при приближении точки  к
к  называется
называется
ристической плоскостью.
Через точку М перпендикулярно к касательной  проведем плоскость, которая называется нормальной плоскостью (плоскость ІІ на рис. 2.15). Очевидно, что любая прямая, проведенная в этой плоскости через точку М, будет перпендикулярна к
проведем плоскость, которая называется нормальной плоскостью (плоскость ІІ на рис. 2.15). Очевидно, что любая прямая, проведенная в этой плоскости через точку М, будет перпендикулярна к  то есть будет нормали кривой.
то есть будет нормали кривой.
Линия пересечения ристической и нормальной плоскости называется главной нормалью кривой. Плоскость, проведенная через точку М перпендикулярно к главной нормали, называется спрямною плоскостью (плоскость ІІІ на рис. 2.15). Линия пересечения спрямнои и нормальной плоскости называется бинормаллю кривой. Соприкасающаяся, нормальная и спрямна плоскости образуют натуральный трехгранник.
Итак, в каждой точке кривой можно провести три взаимно перпендикулярные направления и принять их за координатные оси: касательную, направленную в сторону увеличения дуговой координаты; главную нормаль, направленную в сторону вогнутости кривой, и бинормаль, направленную перпендикулярно касательной и главной нормали так, чтобы образовывать с ними правую систему осей. Орты этих осей обозначаются соответственно  Эти оси образуют натуральную систему координат с началом в подвижной точке, а следовательно, и движутся вместе с ней, оставаясь взаимно перпендикулярными.
Эти оси образуют натуральную систему координат с началом в подвижной точке, а следовательно, и движутся вместе с ней, оставаясь взаимно перпендикулярными.
2. Кривизна кривой
В п. 2.3.3 было показано, что орт  касательной оси направляется в сторону роста дуговой координаты и определяется по формуле
касательной оси направляется в сторону роста дуговой координаты и определяется по формуле

Модуль орта  постоянный, равный единице, но направление
постоянный, равный единице, но направление  меняется при перемещении точки по криволинейной траектории, то есть орт
меняется при перемещении точки по криволинейной траектории, то есть орт  является изменяемым вектором. Поскольку его направление зависит от положения точки на траектории, то орт
является изменяемым вектором. Поскольку его направление зависит от положения точки на траектории, то орт  будет векторной функцией дуговой координаты S, то есть
будет векторной функцией дуговой координаты S, то есть 
Проследим, чему равно отношение прироста орта  к приросту дуговой координаты
к приросту дуговой координаты  Для этого на криволинейной траектории движения точки возьмем два близких ее положения
Для этого на криволинейной траектории движения точки возьмем два близких ее положения  и
и  которым соответствуют значение дуговых координат (рис. 2.16)
которым соответствуют значение дуговых координат (рис. 2.16)


Проведем орты  и
и  касательных в этих точках. Определим прирост орта
касательных в этих точках. Определим прирост орта  на участке дуги
на участке дуги  Для этого перенесем в точку М орт
Для этого перенесем в точку М орт  Как видно из рис. 2.16,
Как видно из рис. 2.16, 
Разделив  на прирост дуговой координаты
на прирост дуговой координаты  получим вектор
получим вектор характеризующий поворот касательной к кривой на отрезке дуги
характеризующий поворот касательной к кривой на отрезке дуги  Вектор
Вектор  направлен так, как вектор
направлен так, как вектор  то есть в сторону вогнутости кривой и размещен в плоскости векторов
то есть в сторону вогнутости кривой и размещен в плоскости векторов  Граница, к которой следует вектор
Граница, к которой следует вектор  при
при  называется вектором кривизны траектории в данной точке, то есть
называется вектором кривизны траектории в данной точке, то есть 
Определим модуль вектора кривизны  Для этого рассмотрим равнобедренный треугольник, образованный ортами
Для этого рассмотрим равнобедренный треугольник, образованный ортами  и вектором
и вектором  (Рис. 2.16). Модуль вектора
(Рис. 2.16). Модуль вектора  найдем как длину основания в этом треугольнике
найдем как длину основания в этом треугольнике 
Угол  образованный сторонами
образованный сторонами  и
и  называется углом смежности. При малом расстоянии между точками
называется углом смежности. При малом расстоянии между точками  и
и  угол смежности также мал, а следовательно,
угол смежности также мал, а следовательно, 
Тогда 
С дифференциальной геометрии известно, что предел отношения угла смежности  к приросту дуговой координаты
к приросту дуговой координаты при
при  равна кривизне кривой K, то есть
равна кривизне кривой K, то есть  где ρ — радиус кривизны траектории в данной точке М. Итак,
где ρ — радиус кривизны траектории в данной точке М. Итак, 
Установим направление вектора кривизны  Граничным положением плоскости треугольника, образованного векторами
Граничным положением плоскости треугольника, образованного векторами  и
и  есть соприкасающаяся плоскость. Итак, вектор
есть соприкасающаяся плоскость. Итак, вектор  лежит в соприкасающихся плоскости. Угол β, образованный вектором
лежит в соприкасающихся плоскости. Угол β, образованный вектором
 с касательной в точке М, определится из вышеперечисленного равнобедренного треугольника
с касательной в точке М, определится из вышеперечисленного равнобедренного треугольника

При приближении точки  к точке М угол смежности
к точке М угол смежности  направляется к нулю, поэтому
направляется к нулю, поэтому

Поскольку вектор кривизны лежит в соприкасающихся плоскости и перпендикулярно к орту  то он направлен по главной нормали к центру кривизны кривой. Представим вектор кривизны
то он направлен по главной нормали к центру кривизны кривой. Представим вектор кривизны  в виде
в виде

3. Определение ускорения движения точки. Касательное и нормальное ускорение
Определим ускорение точки с натурального способа задания ее движения. Используя формулы (2.33) и (2.28), получим 
Определим, какой смысл имеет вектор  Как было показано выше, вектор
Как было показано выше, вектор  является функцией дуговой координаты S, которая в свою очередь является функцией времени t. Итак, вектор
является функцией дуговой координаты S, которая в свою очередь является функцией времени t. Итак, вектор  можно рассматривать как сложную функцию времени t.
можно рассматривать как сложную функцию времени t.
Поэтому 
Учитывая формулы (2.47) и (2.45), выражение (2.46) запишем 
Из формулы (2.48) следует, что ускорение состоит из двух векторов. Первое слагаемое  является вектором, направленным по касательной к траектории, и называется касательным ускорением
является вектором, направленным по касательной к траектории, и называется касательным ускорением 

Второе слагаемое  является вектором, направленным по главной нормали, и называется нормальным ускорением
является вектором, направленным по главной нормали, и называется нормальным ускорением 

Таким образом, полное ускорение точки равна векторной сумме касательного и
нормального ускоренного:

Выясним, который кинематический смысл имеют две составляющие ускорения. Алгебраическое значение касательного ускорения согласно (2.49) и (2.30) можно записать в виде

Как видно из формулы (2.52), касательное ускорение характеризует изменение скорости точки по величине и равна второй производной по времени от дуговой координаты или первой производной по времени от алгебраической величины скорости точки.
Направление касательного ускорения  зависит от знака производной
зависит от знака производной 
Если знак производной совпадает со знаком алгебраической величины скорости 
то вектор  совпадает по направлению с вектором скорости
совпадает по направлению с вектором скорости  (рис. 2.17, а) и движение точки будет ускоренным. В случае, когда знаки производной
(рис. 2.17, а) и движение точки будет ускоренным. В случае, когда знаки производной  и алгебраической величины скорости
и алгебраической величины скорости  разные, вектор
разные, вектор  напрямляеться противоположно вектору
напрямляеться противоположно вектору  (рис. 2.17, б) и движение точки будет замедленным.
(рис. 2.17, б) и движение точки будет замедленным.

Скалярный множитель в формуле (2.50) есть всегда положительным, поэтому величина (модуль) нормального ускорения равен

Вектор  всегда напрямляеться по главной нормали к центру кривизны и характеризует изменение скорости по направлению.
всегда напрямляеться по главной нормали к центру кривизны и характеризует изменение скорости по направлению.
Поскольку векторы  и
и  перпендикулярны между собой, то модуль полного ускорения определим по формуле
перпендикулярны между собой, то модуль полного ускорения определим по формуле

Вектор полного ускорения  напрямляеться по диагонали прямоугольника, построенного на векторах
напрямляеться по диагонали прямоугольника, построенного на векторах  и
и  а угол, образованный этим вектором с радиусом кривизны траектории ρ, определится по формуле
а угол, образованный этим вектором с радиусом кривизны траектории ρ, определится по формуле

Замечания. Вектор полного ускорения  лежит в соприкасающихся плоскостях, а это значит, что его проекции на оси натуральной системы координат равны:
лежит в соприкасающихся плоскостях, а это значит, что его проекции на оси натуральной системы координат равны:

Если движение точки задано координатным способом, а необходимо определить ее касательное и нормальное ускорения, то сначала по формулам (2.19) и (2.38) определяют модули скорости и ускорения точки

Формуле (2.52) можно придать другой вид:

или

где знак «плюс» в ответе избирается, если  а знак «минус» — в противном случае.
а знак «минус» — в противном случае.
Нормальное ускорение точки определяется по формуле (2.54) 
Радиус кривизны траектории находим из формулы (2.53):

Зависимости для кинематических характеристик движения точки при различных
способах задания движения сведены в табл. 2.1.
Таблица 2.1
Кинематические характеристики движения точки

Отдельные случаи движения точки
Проследим, как зависит характер движения точки от значений касательного и нормального ускорение.
1. Если во время движения точки в течение некоторого промежутка времени ее нормальное и касательное ускорение равны нулю то и полное ускорение точки на этом промежутке времени будет равно нулю
то и полное ускорение точки на этом промежутке времени будет равно нулю  В этом случае точка движется равномерно и прямолинейно
В этом случае точка движется равномерно и прямолинейно  Действительно, если
Действительно, если  а это значит, что траектория движения прямая. Когда
а это значит, что траектория движения прямая. Когда  то есть движение равномерное.
то есть движение равномерное.
2. Если в течение некоторого промежутка времени касательное ускорение точки равно нулю а нормальное ускорение не равно нулю
а нормальное ускорение не равно нулю  то происходит изменение скорости точки только по направлению, то есть точка движется равномерно по криволинейной траектории
то происходит изменение скорости точки только по направлению, то есть точка движется равномерно по криволинейной траектории  В этом случае полное ускорение точки равно нормальному ускорению
В этом случае полное ускорение точки равно нормальному ускорению

Найдем уравнение равномерного движения точки. Пусть в начальный момент времени точка находилась на расстоянии  от начала отсчета на траектории. Из формулы (2.30) имеем
от начала отсчета на траектории. Из формулы (2.30) имеем

Интегрируя это уравнение в соответствующих пределах, получим:

Уравнением равномерного движения точки по траектории будет

Замечания. если  только в определенный момент времени, то движение
только в определенный момент времени, то движение
точки неравномерно, а в данный момент времени скорость ее достигает экстремального значения (если  меняет знак).
меняет знак).
3. Если во время движения точки в течение некоторого промежутка времени нормальное ускорение точки равно нулю  а касательное ускорение не равно нулю
а касательное ускорение не равно нулю  то скорость точки
то скорость точки  а значит,
а значит,  и точка движется прямолинейно и неравномерно.
и точка движется прямолинейно и неравномерно.
Ускорение точки в этом случае  (рис. 2.18). причем, если направление векторов
(рис. 2.18). причем, если направление векторов 
и  совпадает, то есть знаки
совпадает, то есть знаки  и
и  одинаковы, то движение точки будет ускоренным (рис. 2.18, а).
одинаковы, то движение точки будет ускоренным (рис. 2.18, а).
Если же направления векторов  и
и  противоположные, то есть знаки
противоположные, то есть знаки  и
и  есть
есть
разные, то движение точки будет замедленным (рис. 2.18, б). Если  только в определенный момент времени, то движение точки не является прямолинейным. В этот момент времени она или проходит точку перегиба траектории
только в определенный момент времени, то движение точки не является прямолинейным. В этот момент времени она или проходит точку перегиба траектории  (рис. 2.18, в), или
(рис. 2.18, в), или
меняет направление движения на противоположное

4. Если в течение некоторого промежутка времени касательное и нормальное ускорение не равно нулю 
 то скорость точки меняется как по величине, так и по направлению. В этом случае точка совершает криволинейное неравномерное движение. Модуль ускорение точки определим по формуле (2.54).
то скорость точки меняется как по величине, так и по направлению. В этом случае точка совершает криволинейное неравномерное движение. Модуль ускорение точки определим по формуле (2.54).
5. Если во время движения точки по траектории касательное и нормальное ускорение не равно нулю  и касательное ускорение постоянное по модулю, то есть
и касательное ускорение постоянное по модулю, то есть  то движение точки будет равномерным криволинейным.
то движение точки будет равномерным криволинейным.
Найдем уравнение равномерного движения точки по траектории, считая, что в начальный момент времени  начальная скорость точки равнялась
начальная скорость точки равнялась  а начальное значение дуговой координаты
а начальное значение дуговой координаты 
Согласно формуле (2.52)

Разделим переменные величины и проинтегрируем уравнение в пределах, что соответствуют начальном и бегущей положениям точки:

Выражение (2.58) является законом изменения скорости по ровносменного движения точки.
Поскольку  или
или
Проинтегрируем последнее выражение и получим:

откуда 
Зависимость (2.59) является уравнением ровносменного движения точки по траектории.
При движение будет равноускооренное при
движение будет равноускооренное при  — ровнозамедленный.
— ровнозамедленный.
Отдельные случаи движения точки в зависимости от ее кинематических параметров
приведены в табл. 2.2.
Таблица 2.2
Отдельные случаи движения материальной точки

Примеры на определение кинематических характеристик движения точки
Задача 2.1. В механизме эллипсограф ползуны А и В соединены между собой линейкой АВ и могут двигаться по двум взаимно-перпендикулярных направлениях (рис. 2.19).
Механизм приводится в движение кривошипом ОС, который вращается с постоянной угловой скоростью ω вокруг точки О.
Найти уравнение траектории, скорость, уравнение годографа скорости и ускорения точки М линейки АВ, если:


Решение. Как было показано выше, для нахождения кинематических характеристик движения точки необходимо иметь уравнение ее движения, заданные одним из способов. В данной задачи уравнения движения точки М непосредственно не заданы, а потому
решения ее необходимо начинать с нахождения этих уравнений.
Составим уравнения движения точки в декартовой системе координат. для этого оси  и
и  направим вдоль ОВ и ОА. Найдем координаты
направим вдоль ОВ и ОА. Найдем координаты  и
и  точки М, как функции времени t.
точки М, как функции времени t.
Из рис. 2.20 видно, что


Согласно условию задачи  Тогда уравнение движения точки М имеют вид
Тогда уравнение движения точки М имеют вид 
Для определения уравнения траектории точки М исключим время t из уравнений движения
(Здесь и далее индекс М не пишем)

Обе части этих равенств поднимем к квадрату и почленно добавим.
Получим

Итак, траектории точки М будет эллипс с полуосями а, b.
Для определения скорости точки М в произвольный момент времени используем формулы (2.18) и (2.19). тогда

Направление вектора  в любой момент времени определяется по формулам
в любой момент времени определяется по формулам

Найдем уравнение годографа скорости по формулам

Исключим из этих уравнений параметр t:

Годографом скорости является эллипс с полуосями  и
и 
Ускорение точки М найдем за его проекциями на оси координат по формулам (2.37), (2.38)

Итак, ускорение точки пропорционально ее расстоянию от начала координат OM = r.
Направление вектора ускорения определим за направляющими косинусами

Заметим, что в данной задаче величины  и
и являются направляющими косинусами радиус-вектора
являются направляющими косинусами радиус-вектора  точки М. Поэтому вектор ускорения
точки М. Поэтому вектор ускорения  направлен по линии ОМ, но противоположно вектору
направлен по линии ОМ, но противоположно вектору  о чем свидетельствует знак минус при проекциях
о чем свидетельствует знак минус при проекциях  и
и 
Задача 2.2. Движение точки задано уравнениями  (X, у — в сантиметрах, t — в секундах). Определить уравнение траектории точки и для момента времени t = 2 с найти положение точки на траектории, ее скорость, осязаемое, нормальное и полное ускорения, а также радиус кривизны траектории в этом положении точки.
(X, у — в сантиметрах, t — в секундах). Определить уравнение траектории точки и для момента времени t = 2 с найти положение точки на траектории, ее скорость, осязаемое, нормальное и полное ускорения, а также радиус кривизны траектории в этом положении точки.
Решение. Заданные уравнения движения точки являются параметрическими уравнениями
траектории. Исключим из них время t и получим

Поскольку время  то уравнение траектории точки запишется
то уравнение траектории точки запишется


Итак, траекторией точки является правая ветвь параболы (рис. 2.21). Покажем на ней положение точки М. При  Определим проекции скорости точки на оси координат
Определим проекции скорости точки на оси координат

Модуль скорости точки равен 
Ускорение точки определим аналогично по проекциями на оси координат

Величина касательного ускорения по формуле (2.52) равна


Найдем нормальное ускорение точки по формуле 
Радиус кривизны траектории в данной точке М по формуле (2.53) равна

Векторы  изображены на рис. 2.21.
изображены на рис. 2.21.
Задача 2.3. Точка движется по окружности радиуса R = 20 см по закону (S в сантиметрах, t — в секундах). Найти скорость, касательное, нормальное и полное ускорения точки в момент
(S в сантиметрах, t — в секундах). Найти скорость, касательное, нормальное и полное ускорения точки в момент 
Решение. Как видно из условия задачи, движение точки задано натуральным способом. Алгебраические величины скорости и касательного ускорения равны 
При  скорость
скорость  касательное ускорение
касательное ускорение 
Таким образом, полное ускорение точки в данный момент времени равна ее нормальном ускорению 
Задача 2.4. Самолет приземляется со скоростью 108 км / ч. Проехав 100 м, он остановился. Считая движение самолета прямолинейным и ровнозамедленным определить его ускорения.
Решение. Поскольку движение самолета ровнозамедленное то касательное ускорение Согласно формулам (2.58) и (2.59)
Согласно формулам (2.58) и (2.59) 
В данной задачи 
Время движения самолета к остановке и пройденный им путь определим, принимая конечные условия движения: при 
Тогда 
Откуда 
Поскольку  то есть ровнозамедленное движение самолета.
то есть ровнозамедленное движение самолета.
Задачи по кинематике с решениями и примерами
В данной части кроме минимума теоретических знаний, какими должен овладеть студент по кинематике, приводятся примеры решения различных задач, исходные данные в
индивидуального расчетного-графического задания и образец его выполнения.
Задачи расчетно-графического задания охватывают материал следующих тем кинематики:
- — кинематика точки (тема КИ);
- — поступательное и вращательное движения тела (тема К2);
- — плоское движение тела (тема К3);
- — сложное движение точки (тема К4).
Задачи 1,3 и 4 объединены в общие выходные данными.
Графические построения к заданию по кинематике выполняются на листе бумаги формата А3.
Вариант расчетно-графического задания определяется двумя цифрами, которые представляют собой две последние цифры номера зачетной книжки или задаются преподавателем.
Для тем К1, К3 и К4 первая цифра шифра определяет номер варианта в таблице К1, а вторая — в таблице К2. Для темы К2 первая цифра шифра определяет номер рисунка (рис.
К2.2), а вторая — вариант в таблице К3.
Кинематика точки и её задачи
Краткие сведения из теории:
Кинематика — раздел теоретической механики, в котором изучаются геометрические свойства механического движения материальных тел без учета условий и причин, которые вызывают или меняют это движение, то есть без учета масс тел и сил которые действуют на эти тела.
Основной задачей кинематики точки является обозначение ее движения и определения основных характеристик этого движения: траектории, пройденного пути, перемещения, скорости и ускорение в любой момент времени относительно выбранной
системы отсчета.
При координатном способе определения движения точки его кинематические уравнения выражены зависимостью координат точки от времени. В прямоугольной (декартовой) системе координат  эти уравнения имеют вид:
эти уравнения имеют вид:


Когда точка движется в плоскости, например,  то система уравнений упрощается до двух:
то система уравнений упрощается до двух:

Траекторией точки называется линия, которая описывается подвижной точкой в пространстве. Траектория точки выражается уравнением в виде зависимости между ее координатами:

При координатном способе определения движения скорость точки определяется через ее проекции на координатные оси:

а величина (модуль) скорости соответственно равна:

Вектор скорости направлен по касательной к траектории в сторону движения точки. Единицей измерения скорости в системе СИ есть метр в секунду: 
Ускорение точки — векторная величина, которая характеризует быстроту изменения скорости со временем.
При координатном способе определения движения точки проекции ускорения точки на координатные оси равны:

Величина (модуль) ускорения вычисляется по формулой:

Единицей измерения ускорения в системе СИ является метр в секунду в квадрате: 
Если известна траектория точки и выбрана естественная система координат  (ось
(ось  направить за касательной, а ось
направить за касательной, а ось  перпендикулярно к
перпендикулярно к  в сторону центра кривизны) то ускорение точки (рис. К1.1) можно разложить на составляющие тангенциальную (или касательную) за осью
в сторону центра кривизны) то ускорение точки (рис. К1.1) можно разложить на составляющие тангенциальную (или касательную) за осью  и нормальную (или
и нормальную (или
центростремительную) по оси 
Тангенциальное ускорение  направленное вдоль касательной траектории и по модулю равна:
направленное вдоль касательной траектории и по модулю равна:

При этом, если величины  и V имеют одинаковые знаки, то векторы
и V имеют одинаковые знаки, то векторы 
и  направлены в одну сторону, если же величины
направлены в одну сторону, если же величины  и V имеют разные знаки, векторы
и V имеют разные знаки, векторы  и
и  направлены в разные стороны.
направлены в разные стороны.
Если дифференцировать по времени выражение скорости точки при ее движении в плоскости  то получим:
то получим:

Нормальное  ускорение всегда направлено вдоль нормали до траектории в сторону центра кривизны и равняется:
ускорение всегда направлено вдоль нормали до траектории в сторону центра кривизны и равняется:

где  радиус кривизны траектории в данной точке.
радиус кривизны траектории в данной точке.
Полное же ускорение через нормальную и тангенциальную составляющую соответственно равно:

Порядок решения задач по кинематике точки
При решении задач на определение скорости и ускорение точки нужно придерживаться следующего порядка:
1. Выбрать систему координат.
2. Составить уравнение движения точки в выбранной системе координат.
3. Дифференцируя уравнение движения точки определить проекции вектора скорости на оси координат, его величину и направление.
4. Дифференцируя уравнение проекции скорости, определить проекции вектора ускорения на оси координат, его величину и направление.
Примеры решения задач по кинематике точки с решением
Задача 1
Движение точки на плоскости определяется уравнениями:

Определить уравнение траектории и направление движения точки.
Решение. Уравнение траектории указано в параметрической форме, координаты  и
и  зависят от параметра
зависят от параметра  (времени).
(времени).
Чтобы получить уравнение траектории в координатной форме, то есть в виде зависимости  необходимо исключить из обоих уравнений движения время
необходимо исключить из обоих уравнений движения время 
Возведем квадрат левые и правые части уравнений движения:

или

Добавим эти уравнения:

Поскольку

Уравнением траектории точки является эллипс с центром в начале системы координат, большая полуось которого равняется 5-ти единицам длины (по оси  ), а малая (по оси
), а малая (по оси  ) — 3-ом единицам длины (рис.1).
) — 3-ом единицам длины (рис.1).

В начальный момент времени  точка находится в положении
точка находится в положении
 с координатами:
с координатами:

В начальный момент движения (при росте  координата
координата  начнет увеличиваться, а координата
начнет увеличиваться, а координата — уменьшаться.
— уменьшаться.
Таким образом, точка будет двигаться за ходом часовой стрелки.
Ответ:
а) уравнение траектории 
б) точка движется по ходу часовой стрелки.
Задача 2
В механизме (рис.1) тело ОА (кривошип) вращается вокруг неподвижного шарнира О, а тело В(ползун) движется обратно-поступательно по оси  Точка А тела АВ (шатуна) движется по траектории точки А кривошипа, а точка В — по траектории ползуна.
Точка А тела АВ (шатуна) движется по траектории точки А кривошипа, а точка В — по траектории ползуна.
Определить уравнение движения и траекторию средней
точки М шатуна и уравнения движения ползуна В, если в начальный момент ползун находился в крайнем правом положении; кривошип ОА вращается с постоянной угловой скоростью 
Решение. Для определения траектории точки М изобразим механизм в произвольном положении и составим уравнение ее движения в координатной форме.
Из рис. 1 видно, что:


Поскольку треугольник ОАВ равнобедренный (ОА = АВ), углы АВС и АОС равны между собой и равны 
Из треугольника ОАС найдем расстояние OC:
 из треугольника MBD расстояния CD и MD:
из треугольника MBD расстояния CD и MD:

Тогда:

Если учесть числовые данные, то уравнения движения точки М приобретут вид:

Для нахождения траектории точки М возведем уравнение движения к квадрату и добавим:

Учитывая, что  получим выражение для уравнения траектории:
получим выражение для уравнения траектории:

Таким образом, траекторией точки будет эллипс, одна полуось которого, по оси  составляет 1,2 м, а вторая, по оси
составляет 1,2 м, а вторая, по оси  0,4 м.
0,4 м.
Определим координаты точки В:

Таким образом, уравнение движения ползуна В будет иметь вид:

Ответ: 
Задача 3
Точка движется по кругу радиусом R =4 м. Путь в метрах, который проходит точка по траектории, в любой момент времени определяется уравнением: 
Определить величину ускорения точки и угол  который образуют между собой векторы скорости и ускорения в момент времени, когда величина скорости
который образуют между собой векторы скорости и ускорения в момент времени, когда величина скорости
равняется 6 
Решение. Изобразим траекторию с точкой М в произвольном положении (рис.1).

Скорость  направим по касательной к кругу, нормальное ускорение
направим по касательной к кругу, нормальное ускорение 
— к центру круга, а касательное  по скорости, принимая, что оно положительное.
по скорости, принимая, что оно положительное.
Угол  между векторами скорости
между векторами скорости  и полного ускорение
и полного ускорение  равняется:
равняется:

Найдем величину нормального ускорения:

Функциональные зависимости для скорости и касательного ускорения найдем по уравнению движения точки:

Поскольку для вычисления ускорения надо знать время, когда скорость будет равняться 6 м/с, то из первого уравнения получим:

Величина касательного ускорения:

Тогда:

Полное ускорение точки:

Ответ: 
Задания темы К1
Кинематические уравнения движения точки А тела, что движется в плоскости  имеет вид :
имеет вид :

Коэффициенты  приведены в таблице К1, а коэффициенты
приведены в таблице К1, а коэффициенты  и время
и время  в таблице К2. Координаты
в таблице К2. Координаты  и
и  заданные в метрах.
заданные в метрах.
Определить: уравнение траектории, скорость, ускорение точки А и радиус кривизны траектории точки в момент времени  Изобразить на рисунке в декартовой системе
Изобразить на рисунке в декартовой системе
координат  траекторию точки и ее положение в момент времени
траекторию точки и ее положение в момент времени  Показать составляющие скорости и ускорения, параллельные осям координат, полную
Показать составляющие скорости и ускорения, параллельные осям координат, полную
скорость и ускорение, касательное и нормальное ускорение.

К1.6. Пример решения задания темы К1
Рассмотрим пример при таких исходных данных и коэффициентах: 

1. Определение кинематических уровней движения точки А
Подставим значение соответствующих коэффициентов в уравнение (К1.12), тогда:

После вычислений получим:

Полученные выражения и являются искомыми кинематическими уравнениями движения точки А.
2. Определение уравнения траектории точки А
Для определения уравнения траектории удалим из уравнений (1) параметр  С этой целью перенесем в этих уровнях свободный член в левую часть, поделим на коэффициенты при соответствующих тригонометрических функциях и оба уравнения возведем в квадрат. Добавив правые и левые части уравнений и с учетом того, что
С этой целью перенесем в этих уровнях свободный член в левую часть, поделим на коэффициенты при соответствующих тригонометрических функциях и оба уравнения возведем в квадрат. Добавив правые и левые части уравнений и с учетом того, что
 получим
получим

Полученное выражение является уравнением траектории точки А и
представляет собой эллипс с полуосями, по оси  с =4,8 м и по
с =4,8 м и по
оси  d =1,6 м. Центр эллипса лежит в точке с координатами:
d =1,6 м. Центр эллипса лежит в точке с координатами: 
Для определения положения точки А на траектории в момент времени  подставим значение
подставим значение  в уравнение (1):
в уравнение (1):

3. Определение скорости точки А
Поскольку проекция скорости на ось равна производной по времени от соответствующей координаты (К1.4), то:

В момент времени  получим:
получим:

Отрицательное значение проекции  означает, что составляющая
означает, что составляющая  вектора полной скорости
вектора полной скорости  направлена в сторону отрицательных значений оси
направлена в сторону отрицательных значений оси 
4. Определение ускорения точки А и радиуса кривизны траектории.
Воспользовавшись выражениями (2) определим проекции ускорения точки А на оси  и
и


В момент времени  получаем:
получаем:

Полное ускорение в момент времени 

Знаки минус перед значениями проекций  и
и  означают, что составляющие
означают, что составляющие 
и  вектора полного ускорение
вектора полного ускорение  направленные в стороны отрицательных значений соответствующих осей координат.
направленные в стороны отрицательных значений соответствующих осей координат.
Из формул (К1.9, К1.11) определим величины тангенциального и нормального ускорения:

По известной скорости  и величиной нормального ускорения
и величиной нормального ускорения  из формулы (К1.10) найдём радиус кривизны траектории для этого положения точки:
из формулы (К1.10) найдём радиус кривизны траектории для этого положения точки:

5. Графические построения
По результатам расчетов строится чертеж (черта К1.2).
Поскольку полученные размеры измеряются в метрах, а на чертеже откладываются в миллиметрах, то постройки выполняются в определенном масштабе (это же касается и отрезков, которые изображают на чертежах векторы скоростей и ускорений). Для этого сначала необходимо определить масштабные коэффициенты длин  скоростей
скоростей 
и ускорений 
Масштабным коэффициентом  называется отношение действительной величины к отрезку в миллиметрах, который будет изображать эту величину на чертеже.
называется отношение действительной величины к отрезку в миллиметрах, который будет изображать эту величину на чертеже.
Отрезок, изображающий определенную величину на чертеже, подбирают произвольно исходя из следующих соображений:
- чертеж должен иметь определенные размеры (не быть очень большим, или очень маленьким);
- по возможности величина масштабного коэффициента должна иметь одну значимую цифру.
По определенными масштабными коэффициентами надо перечислить действительные величины найденных параметров в отрезки, которые будут изображать эти величины на чертеже, и только после этого выполнять построения на чертеже.
Выберем масштабный коэффициент длин  При разрешении задачи были определены следующие линейные размеры:
При разрешении задачи были определены следующие линейные размеры:

Выберем любой из этих размеров, например  Пусть эту координату на чертеже будет изображать отрезок
Пусть эту координату на чертеже будет изображать отрезок  Тогда масштабный коэффициент длин
Тогда масштабный коэффициент длин  будет равняться:
будет равняться:

При этом отрезки, которые будут изображать на чертеже линейные величины равны:

Выберем масштабный коэффициент скоростей 
При решении задачи были найдены скорости:

Выберем любую из этих скоростей, например  Пусть эту скорость на чертеже будет изображать отрезок
Пусть эту скорость на чертеже будет изображать отрезок  Тогда масштабный коэффициент скоростей
Тогда масштабный коэффициент скоростей  будет равняться:
будет равняться:

При этом отрезки, которые будут изображать на чертеже составляющие скорости будут равняться:

Выберем масштабный коэффициент ускорений 
При решении задачи были найдены ускорения:

Выберем любое из этих ускорений, например
 Пусть это ускорение на чертеже будет изображать отрезок
Пусть это ускорение на чертеже будет изображать отрезок  Тогда масштабный коэффициент ускорений
Тогда масштабный коэффициент ускорений  будет равняться:
будет равняться:

При этом отрезки, которые будут изображать на чертеже составляющие ускорения будут равны:

На чертежах (рис К1.2):
1. С произвольной точки О под прямым углом одна к второй проводим координатные оси  и
и 
2. Строим траекторию точки по известным полуосям эллипса  и
и  и координатами центра
и координатами центра 

3. Показываем точку А в момент времени  за ее координатами на оси
за ее координатами на оси  и
и 
4. По известным отрезкам  и
и  проекций изображаем параллельные к осям координат составляющие
проекций изображаем параллельные к осям координат составляющие  и
и  скорости (если проекция отрицательная, то составляющая направлена против положительного направления соответствующей оси);
скорости (если проекция отрицательная, то составляющая направлена против положительного направления соответствующей оси);
5. Определяем скорость точки  через составляющие по правилу параллелограмма
через составляющие по правилу параллелограмма
6. По известным отрезкам  и
и  проекций изображаем параллельные к осям координат составляющие
проекций изображаем параллельные к осям координат составляющие  и
и  ускорение (если проекция ускорения отрицательная, то составляющая направлена против положительного направления
ускорение (если проекция ускорения отрицательная, то составляющая направлена против положительного направления
соответствующей оси);
7. Определяем ускорение точки  через составляющие по правилу параллелограмма;
через составляющие по правилу параллелограмма;
8. Изображаем составляющие ускорения  и
и  в естественной системе координат.
в естественной системе координат.
9. По известным направлением  и радиусом кривизны
и радиусом кривизны  определяем положение центра кривизны эллипса в точке А (точка
определяем положение центра кривизны эллипса в точке А (точка  ).
).
Следует помнить , что вектор скорости направлен по касательной траектории точки, а вектор ускорения — в сторону кривизны траектории.

Кинематика — полная лекция с формулами и теорией с примерами
Кинематикой называется раздел теоретической механики, в котором изучается механическое движение тел с геометрической точки зрения, то есть без учета их масс и сил, что на них действуют.
Движение тел в кинематике рассматривают по отношению к некоторой системе координат, которая связана с другим телом, например, с Землей.
Основная задача кинематики заключается в том, что по уравнениям, которые определяют закон движения данного тела, надо найти все кинематические характеристики движения тела (траектории различных точек, их скорости и ускорения).
Кинематика делится на кинематику точки и кинематику твердого тела.
В первом разделе учебного пособия рассматриваются следующие темы кинематики:
- Кинематика точки.
- Поступательное движение тела.
- Вращательное движение тела вокруг неподвижной оси.
- Плоское движение тела.
- Сложное движение точки.
На изучение этих тем отводится восемь занятий.
Кинематика точки
Кинема́тика точки — раздел кинематики, изучающий математическое описание движения материальных точек. Основной задачей кинематики является описание движения при помощи математического аппарата без выяснения причин, вызывающих это движение.
Траектория и уравнения движения точки
Описать движение точки – это значит указать правило, по которому в любой момент времени  можно определить положение точки в пространстве.
можно определить положение точки в пространстве.
Различают три способы описания движения точки: координатный; векторный; естественный.
Координатный способ описания движения точки
Положение точки  в пространстве при координатном способе описание движения определяется тремя координатами:
в пространстве при координатном способе описание движения определяется тремя координатами:  (рис.1.1).
(рис.1.1).

Если точка движется, то эти координаты со временем непрерывно меняются.
Таким образом, для описания движения точки достаточно задать функциональные зависимости вида:

Уравнения (1.1) называются уравнениями движения точки в прямоугольных координатах.
Движение точки в плоскости, например  , определяется двумя уравнениями движения:
, определяется двумя уравнениями движения:

Для описания прямолинейного движения точки, например, по оси  , достаточно одного уравнения:
, достаточно одного уравнения:

Определение траектории точки при координатном способе описания ее движения
Траекторией называется та совокупность точек, через которые последовательно проходит тело во время движения в данной системе отсчета.
Траектория – одна из основных характеристик, которая дает представление о движении в целом. Первым признаком, по которому выполняется распределение движений на разные виды, является траектория.
Определение траектории является одной из важных частей задач механики.
В зависимости от формы траектории движение относят к прямолинейному или криволинейному движению.
Уравнение движения точки  можно рассматривать как уравнение траектории в параметрической форме.
можно рассматривать как уравнение траектории в параметрической форме.
Для того, чтобы получить уравнение траектории в обычном виде, надо из уравнений движения исключить время  . Так, исключив
. Так, исключив  из уравнений движения (1.2), получим одно уравнение вида:
из уравнений движения (1.2), получим одно уравнение вида:

которое представляет собой уравнение линии на плоскости .
Если исключить время из уравнений движения (1.1), то получим уравнение вида:

Каждое из уравнений системы (1.5) является уравнением некоторой поверхности, а вместе – уравнением траектории, которая представляет собой линию пересечения этих поверхностей.
Определение скорости и ускорения точки при координатном способе описания ее движения
Скорость точки – векторная величина, которая характеризует изменение положения точки в пространстве с течением времени.
Ускорение точки – векторная величина, которая характеризует изменение вектора скорости с течением времени.
В случае координатного способа описания движения точки по известным зависимостям для координат точки (1.1) сначала определяют проекции вектора скорости на координатные оси:

а затем модуль скорости точки:

Направление вектора скорости  определяется через направляющие косинусы углов, которые этот вектор образует с соответствующими осями координат:
определяется через направляющие косинусы углов, которые этот вектор образует с соответствующими осями координат:

Проекции вектора ускорения на координатные оси соответственно равны:

Модуль вектора ускорения определяется по формуле:

Направление вектора ускорения  также определяется через направляющие косинусы углов, которые вектор образует с соответствующими осями координат:
также определяется через направляющие косинусы углов, которые вектор образует с соответствующими осями координат:

Порядок решения задач по кинематике точки
Решение задач на определение закона движения точки и уравнения ее траектории выполняется в такой последовательности:
- Выбирается неподвижная система координат, начало которой определяют, исходя из условий задачи.
- По условиям задачи в избранной системе координат составляют уравнение движения точки, то есть находят зависимость координат точки от времени.
- Из составленных уравнений движения точки можно определить ее положение в любой момент времени, установить направление ее движения, найти траекторию и т.д.
Если по условию задачи надо определить скорость и ускорение точки, то лучше придерживаться такой последовательности:
- Выбрать систему координат.
- В выбранной системе координат составить уравнения движения (иногда они заданы в условиях задачи).
- По уравнениям движения точки определить проекции скорости на оси системы координат, величину скорости и ее направление.
- Определить проекции ускорения точки на оси системы координат, величину ускорения и его направление.
Примеры решения задач
Задача №1
Движение точки на плоскости определяется уравнениями:

Определить уравнение траектории и направление движения точки.
Решение. Уравнение траектории задано в параметрической форме, координаты  и
и  зависят от параметра
зависят от параметра  (времени).
(времени).
Чтобы получить уравнение траектории в координатной форме, то есть в виде зависимости  , необходимо исключить из обоих уравнений движения время .
, необходимо исключить из обоих уравнений движения время .
Возведем в квадрат левые и правые части уравнений движения:

или

Сложим эти уравнения:

Поскольку  то
то

Уравнением траектории точки является эллипс с центром в начале системы координат, большая полуось которого равна 5-ти единицам длины (по оси  ), а малая (по оси
), а малая (по оси  ) – 3-м единицам длины (рис.1.2).
) – 3-м единицам длины (рис.1.2).
 (Направление движения точки)
(Направление движения точки)
В начальный момент времени  точка находится в положении
точка находится в положении  с координатами:
с координатами:

В начальный момент движения (при росте ) координата начнет увеличиваться, а координата − уменьшаться. Таким образом, точка будет двигаться по ходу часовой стрелки.
Ответ: а) уравнение траектории  б) точка движется по ходу часовой стрелки.
б) точка движется по ходу часовой стрелки.
Задача №2
В механизме (рис.1.3) тело  (кривошип) вращается вокруг неподвижного шарнира
(кривошип) вращается вокруг неподвижного шарнира  , а тело
, а тело  (ползун) движется возвратно-поступательно по оси . Точка
(ползун) движется возвратно-поступательно по оси . Точка  тела
тела  (шатуна) движется по траектории точки кривошипа, а точка – по траектории ползуна.
(шатуна) движется по траектории точки кривошипа, а точка – по траектории ползуна.

Определить уравнение движения и траекторию средней точки  шатуна и уравнение движения ползуна , если в начальный момент ползун находился в крайнем правом положении; кривошип вращается с постоянной угловой скоростью
шатуна и уравнение движения ползуна , если в начальный момент ползун находился в крайнем правом положении; кривошип вращается с постоянной угловой скоростью  и
и 
Решение. Для определения траектории точки изобразим механизм в произвольном положении и составим уравнение ее движения в координатной форме.
С рис. 1.3 видно, что:

Поскольку треугольник  равнобедренный (
равнобедренный ( ), то углы
), то углы  и
и  равны между собой и равны
равны между собой и равны  .
.
Из треугольника  найдем расстояние
найдем расстояние  :
:

а из треугольника  расстояния
расстояния  и
и  :
:

Тогда:

Если подставить числовые данные, то уравнения движения точки приобретут вид:

Для нахождения траектории точки возведем уравнение движения к квадрату и сложим:

Учитывая, что  , получим выражение для уравнения траектории:
, получим выражение для уравнения траектории:

Таким образом, траекторией точки будет эллипс, одна полуось которого, по оси , составляет 1,2 м , а вторая, по оси – 0,4 м.
Определим координаты точки :

Таким образом, уравнение движения ползуна будет иметь вид:

Ответ. 
Задача №3
Движение точки задано уравнениями:

где , – в метрах; – в секундах.
Определить траекторию точки, величину и направление скорости и величину и направление ускорения в момент времени 
Решение. Для определения траектории точки возведем к квадрату левые и правые части уравнений движения и сложим их:

Таким образом, уравнение траектории будет иметь вид:

Траекторией точки будет круг радиусом 10 м с центром в начала системы координат.
Проекции вектора скорости на оси координат равны:

Модуль вектора скорости:

Проекции вектора ускорения на оси координат равны:

Модуль вектора ускорения:

Из полученных зависимостей следует, что модули скорости и ускорения не зависят от времени, а их проекции на оси являются функциями времени.
Определим для момента времени  положение точки на траектории и величины проекций скорости и ускорения.
положение точки на траектории и величины проекций скорости и ускорения.
При  угол под знаками косинуса и синуса в уравнениях проекций равен:
угол под знаками косинуса и синуса в уравнениях проекций равен:

С учетом найденного угла получим:

На рис.1.4 показана траектория точки, положение точки в момент времени  и составляющие векторов скорости и ускорения.
и составляющие векторов скорости и ускорения.

Составляющие векторы  и
и  направлены против направления соответствующих осей, поскольку их проекции на эти оси отрицательны.
направлены против направления соответствующих осей, поскольку их проекции на эти оси отрицательны.
Ответ. 
Задача №4
Движение точки задано уравнениями:

где  и
и  — постоянные величины.
— постоянные величины.
Определить уравнение траектории, скорость и ускорение точки, как функцию радиуса-вектора 
Решение. Уравнение траектории в координатной форме найдем, исключив время из уравнений движения точки.
Сначала уравнение движения преобразуем в вид:

Возведем записанные уравнения к квадрату и вычтем от первого второе:

Таким образом, уравнение траектории точки будет иметь вид:

Определим проекции вектора скорости на координатные оси:

Поскольку по условию задачи:

то

Тогда:

Определим проекции вектора ускорения на координатные оси:

Учитывая, что  , то
, то

Ответ. 
Задачи, которые рекомендуются для самостоятельной работы: 11.2; 11.5; 12.13 [2].
Естественный способ описания движения точки
Естественный способ описания движения точки заключается в следующем.
- Любым способом (уравнением, графически, указанием) задается траектория точки
 (рис.1.5) .
(рис.1.5) . - На траектории выбирается некоторая точка как начало отсчета дуги и положительное направление вдоль траектории (на рис. 1.5 слева направо).
- Положение точки на траектории однозначно определяется длиной дуги , которую берут с соответствующим знаком. При движении точки по траектории каждому моменту времени соответствует определенное значение .
 (рис.1.5) .
(рис.1.5) . как начало отсчета дуги и положительное направление вдоль траектории (на рис. 1.5 слева направо).
как начало отсчета дуги и положительное направление вдоль траектории (на рис. 1.5 слева направо). , которую берут с соответствующим знаком. При движении точки по траектории каждому моменту времени
, которую берут с соответствующим знаком. При движении точки по траектории каждому моменту времени Таким образом, для определения положения точки на траектории достаточно задать зависимость:

которая называется естественным уравнением движения.
Естественным способом описания движения точки удобно пользоваться в том случае, когда известна траектория точки.
Определение скорости и ускорения точки при естественном способе описания ее движения
В случае естественного способа описания движения точки по известному уравнению движения (1.12) модуль вектора скорости определяют по формуле:

Направлен вектор скорости по касательной к траектории точки в сторону отсчета координаты  (рис.1.6), если
(рис.1.6), если  , и в противоположную сторону, если
, и в противоположную сторону, если 

При определении ускорения с точкой связывают подвижную систему координат  (рис.1.7): тангенциальную ось
(рис.1.7): тангенциальную ось  направляют по касательной к траектории в сторону скорости точки; нормальную ось
направляют по касательной к траектории в сторону скорости точки; нормальную ось  — по внутренней нормали к траектории (то есть, в сторону центра ее кривизны).
— по внутренней нормали к траектории (то есть, в сторону центра ее кривизны).
Ускорение  раскладывают на составляющие
раскладывают на составляющие  и
и  по осям выбранной системы координат, которые соответственно называют касательной (тангенциальной) и нормальной (центростремительной) составляющими ускорение.
по осям выбранной системы координат, которые соответственно называют касательной (тангенциальной) и нормальной (центростремительной) составляющими ускорение.
По модулю эти ускорения, соответственно, равны:

где  — радиус кривизны траектории.
— радиус кривизны траектории.
Нормальное ускорение всегда направлено к центру кривизны (по направлению оси ), а касательное ускорение — по оси , если  и в противоположную сторону, если
и в противоположную сторону, если  .
.
Нормальное ускорение характеризует изменение направления скорости с течением времени.
Если траекторией точки является прямая линия, то есть  , то
, то  и вектор скорости не будет менять своего направления.
и вектор скорости не будет менять своего направления.
Касательное ускорение характеризует изменение скорости по величине с течением времени.
Если точка движется равномерно  то
то  , а путь, пройденный точкой, определяют по формуле:
, а путь, пройденный точкой, определяют по формуле:

В случае равномерно ускоренного движения точки  скорость точки и путь, который пройден ею, определяют по формулам:
скорость точки и путь, который пройден ею, определяют по формулам:

В приведенных формулах  и
и  — соответственно, начальные значения скорости и пройденного пути, а сами формулы можно получить путем интегрирования зависимости для
— соответственно, начальные значения скорости и пройденного пути, а сами формулы можно получить путем интегрирования зависимости для  (1.14).
(1.14).
Примеры решения задач
Задача №1
Точка движется по окружности радиусом  Закон ее движения по траектории:
Закон ее движения по траектории:

где — в секундах, — в метрах.
Определить величину и направление скорости, касательное и нормальное ускорение точки в момент времени 
Решение. Для определения модуля скорости найдем производную от по времени:

В момент времени  :
:

Скорость точки направлена по касательной к окружности в сторону, которая противоположная положительному направлению отсчета дуги .
Определим величину касательного ускорения:

В момент времени :

Вычислим величину нормального ускорения в момент времени :

Ответ. 
Задача №2
Точка движется по окружности радиусом  . Путь в метрах, который проходит точка по траектории в любой момент времени определяется уравнением:
. Путь в метрах, который проходит точка по траектории в любой момент времени определяется уравнением:

Определить величину ускорения точки и угол  , который образуют между собой векторы скорости и ускорения в момент времени, когда величина скорости равна
, который образуют между собой векторы скорости и ускорения в момент времени, когда величина скорости равна 
Решение. Изобразим траекторию с точкой в произвольном положении (рис.1.8). Скорость  направим по касательной к окружности, нормальное ускорение
направим по касательной к окружности, нормальное ускорение  — к центру окружности, а касательное
— к центру окружности, а касательное  — по скорости, принимая, что оно положительное.
— по скорости, принимая, что оно положительное.

Угол между векторами скорости и полного ускорения  будет равен:
будет равен:

Найдем величину нормального ускорения:

Функциональные зависимости для скорости и касательного ускорения найдем по уравнению движения точки:

Поскольку для вычисления касательного ускорения надо знать время, когда скорость будет равна  , то с первого уравнение получаем:
, то с первого уравнение получаем:

Величина касательного ускорения:

Тогда:

Полное ускорение точки:

Ответ. 
Задача №3
Уравнение движения пальца шарнира  кривошипно-ползунного механизма (рис.1.9) во время его пуска имеют вид:
кривошипно-ползунного механизма (рис.1.9) во время его пуска имеют вид:

где  — в метрах;
— в метрах;  — в секундах.
— в секундах.

Определить скорость, касательное и нормальное ускорение пальца.
Решение. Уравнения для определения касательного и нормального ускорения имеют вид:

Таким образом, для определения и  необходимо знать радиус кривизны траектории и зависимость скорости
необходимо знать радиус кривизны траектории и зависимость скорости  от времени .
от времени .
Для вычисления найдем проекции скорости на координатные оси:

Скорость пальца кривошипа будет равна:

Вычислим величину касательного ускорения:

Для определения радиуса кривизны траектории найдем ее уравнение. Чтобы исключить параметр из уравнений движения (1), возведем в квадрат правые и левые части уравнений, а затем их сложим:

Таким образом, траекторией пальца будет окружность радиусом 
Величина нормального ускорения будет равна :

Ответ. 
Задача №4
Уравнения движения материальной точки имеют вид:

где  — постоянные величины.
— постоянные величины.
Определить касательное и нормальное ускорение точки.
Решение. Касательное ускорение точки определяется по формуле:

При координатном способе описания движения скорость точки через проекции равна:

Подставим выражение для в уравнение для :

где  — проекции скорости на координатные оси;
— проекции скорости на координатные оси;  — проекции ускорения на координатные оси.
— проекции ускорения на координатные оси.
Проекции скорости и ускорения на координатные оси определим по формулам для координатного способа описания движения:


Тогда касательное ускорение точки будет равно:

Для определения нормального ускорения воспользуемся полным ускорением точки, которое уже было найдено, исходя из формул координатного способа описания движения.
Поскольку:

то:

Подставив под корень выражение для , получим:

Ответ. 
Задача №5
Точка движется по окружности радиусом  таким образом, что полное ускорение все время пропорционально квадрату скорости и направлено под тупым углом к ней. Движение начинается с начальной скоростью
таким образом, что полное ускорение все время пропорционально квадрату скорости и направлено под тупым углом к ней. Движение начинается с начальной скоростью  и начальным ускорением
и начальным ускорением 
Определить, за какое время скорость точки уменьшится вдвое, и какой путь при этом она пройдет.
Решение. Изобразим траекторию с точкой в произвольном положении (рис.1.10).

Скорость направим по касательной к траектории, а полное ускорение под углом  к скорости.
к скорости.
Полное ускорение разложим на нормальное и касательное по правилу параллелограмма.
По условию задачи:

где  – коэффициент пропорциональности.
– коэффициент пропорциональности.
Поскольку это равенство должно выполняться и в начальный момент времени  , то:
, то:

Откуда:

Таким образом, закон изменения полного ускорения точки под время движения будет иметь вид:

Определим функциональные зависимости от скорости для нормального и касательного ускорений точки:

В уравнении для было взято отрицательное значение корня, поскольку полное ускорение образует тупой угол с направлением скорости (рис.1.10), то есть касательное ускорение будет направлено противоположно скорости и движение точки будет замедлено.
Для определения времени движения и пройденного точкой пути воспользуемся зависимостью для касательного ускорения:

Разделим переменные и проинтегрируем это выражение:

где  — постоянная интегрирования.
— постоянная интегрирования.
Постоянную интегрирования найдем из начальных условий, когда 
Откуда:

Функциональная зависимость для скорости будет иметь вид:
 или
или 
По условию задачи в конечный момент времени скорость точки уменьшится вдвое, то есть:

Тогда время движения точки будет равно:

Для определения пройденного точкой пути воспользуемся уравнениями:

Разделим переменные и проинтегрируем:

где  — постоянная интегрирования.
— постоянная интегрирования.
Поскольку в начальный момент  , то:
, то:

Таким образом, для пути получим следующую зависимость:

За промежуток времени  путь, пройденный точкой, будет составлять:
путь, пройденный точкой, будет составлять:

Краткие исторические сведенья про развитие кинематики
Появление первых исследований по кинематике связаны с изобретением огнестрельного оружия. Внимание исследователей привлекали вопросы определения траектории полета снаряда, уточнение понятий о неравномерном и криволинейном движении точки. Леонардо да Винчи (1452 1519) первым изучил вопрос о свободном вертикальном падении тяжелого тела. Но только благодаря трудам Г. Галилея (1564 1642) развитие механики непосредственно связывается с запросами тогдашней техники. Г. Галилей ввел понятие об ускорении и доказал, что траекторией движения снаряда, брошенного в пустоте под некоторым углом к горизонту, является парабола. Законы, установленные Г. Галилеем, нашли свое дальнейшее развитие в трудах Э. Торричелли (1608 1647), который получил формулу для определения скорости падение тела. И. Кеплер (1571 1630) установил кинематические законы движения планет. X. Гюйгенс (1629-1695) впервые обратил внимание на возможность разложения ускорения на касательное и нормальное, строгое доказательство которого дал Л. Эйлер (1707 -1783). Л. Эйлеру принадлежат основополагающие исследования по кинематике точки при естественном способе задания движения, по кинематике вращательного движения твердого тела вокруг неподвижной точки. Развитие кинематики системы точек тесно связано с именем Ж. Лагранжа (1736 1813).
Бурный рост машиностроения в XIX в. способствовал новому развитию кинематики как науки. Глубокие исследования по кинематике твердого тела принадлежат французским ученым М. Шалю (1793 1886), Л. Пуансо (1777 1859), Г. Корюлис (1792 1843). В России основателем научной школы по кинематике механизмов был выдающийся математик П. Л. Чебышев (1821 1894). Его научное наследие в этом направлении разрабатывали советские ученые, среди которых отметим Н. И. Мерцалова (1860 1948), И. И. Артоболевского (1905-1978), А. П. Котельникова (1865-1944), Н. Б. Делоне (1856-1931), Д. С. Зерновая (1860-1922), Л. В. Ассура (1878 1920) и др. Н. Е. Жуковскому (1847-1921) принадлежит много работ по теоретической механике, в том числе и по кинематике, в которых широко используются геометрические методы доказательства различных теорем. Глубокие исследования по кинематике провел В. Н. Лигин (1846-1910).
В XX в. развитие авиации, судостроения, ракетной и космической техники, создание роботов-манипуляторов, гибких автоматизированных производств дали новый толчок в развитии кинематики твердых тел и пространственных механизмов. Исследования связаны с именами А. Н. Крылова, А. Ю. Ишлинского, В. М. Кошлякова, Пола, А. П. Бойчука и др.
Введение в кинематику
Кинематикой называется раздел теоретической механики, в котором изучается движение системы материальных точек с геометрической точки зрения, в частности движение абсолютно твердого тела и материальной точки независимо от действующих на них сил.
Кинематику называют также геометрией движения, поскольку в ней рассматриваются геометрические свойства движения. Кинематика изучает зависимости между пространственно-временными характеристиками механического движения. Механические движения, изучаемые в кинематике, происходят в пространстве и времени. Диалектический материализм рассматривает пространство и время как формы существования материи. «Обе эти формы существования материи без материи являются ничем, пустыми представлениями, абстракциями, что существуют только в нашей голове «. Пространство и время неразрывно связаны между собой, их единство проявляется в движении. В. И. Ленин писал: «В мире нет ничего, кроме движущейся материи, и подвижная материя не может двигаться иначе, чем в пространстве и времени «. Понятие же пространства, времени и движущейся материи в классической механике, основанной на законах Ньютона, формально не связаны друг с другом и являются только первым приближением к реальным объективным формам существования материи, которые позже математически строго установлены теорией относительности.
Отметим, что в теоретической механике пространство, в котором происходит движение тел рассматривается как трехмерное, и все измерения выполняются на основании методов евклидовой геометрии. В теоретической механике время считается одинаковым в любых системах отсчета (системах координат), и не зависит от движения этих систем относительно друг друга. Время обозначается буквой  и рассматривается как непрерывно переменная величина, которая применяется в качестве аргумента. В кинематике при изменении времени различают такие понятия, как промежуток времени и начальный момент времени.
и рассматривается как непрерывно переменная величина, которая применяется в качестве аргумента. В кинематике при изменении времени различают такие понятия, как промежуток времени и начальный момент времени.
Промежутком времени называют течение времени между двумя физическими явлениями.
Моментом времени называют границу между двумя смежными промежутками времени.
Начальным моментом времени называют момент времени, с которого начинается отсчет.
Теория относительности привела к новым представлений о пространстве и времени, которые в значительной степени отличаются от представлений классической механики. Вместе с тем, для случаев движения тела со скоростями, значительно меньше
скорость света, трехмерное евклидово пространство и универсальное время являются полноценными и достаточно точными абстракциями реального времени и реального пространства. Следовательно, можно утверждать, что теоретическое и практическое значение классической механики остается огромным и в наше время, поскольку позволяет найти достаточно высокое приближение к объективно существующих реальным формам
бытия, подтверждается современным развитием техники, в частности космонавтики, робототехники и др.
Изучая движение тела, всегда следует знать, относительно какого другого тела, которое называется телом отсчета, рассматривается это движение. Совокупность тела отсчета, с которым связана система координат, и часов называют системой отсчета. Эта система может быть как подвижной, так и условно неподвижной. Точки тела, которые движутся осуществляют в общем случае различные движения. Поэтому в первую очередь возникает необходимость изучить движение отдельных точек тела.
В кинематике нет разницы, какое движение осуществляет выбрана система координат относительно других тел, не входящих в пределы решаемой задачи, однако всегда следует обращать внимание на то, что характер наблюдательного движения во многом зависит от выбора системы координат. Например, поршень двигателя внутреннего сгорания осуществляет относительно корпуса автомобиля прямолинейное, колебательное движение, а относительно дороги, по которой движется автомобиль с постоянной скоростью, — синусоидальный.
В классической механике постулируется наличие системы отсчета, относительно которой пространство однородно и изотропно, а время -однородно.
В этой системе координат изолированная материальная точка может неограниченно долго
находиться в состоянии покоя или равномерного прямолинейного движения. Такую систему отсчета называют инерциальной. Системы отсчета, не имеющие указанных свойств, называют неинерциальными. Все системы отсчета, находящихся в состоянии покоя или движутся поступательно, равномерно и прямолинейно относительно инерциальной системы отсчета, являются также инерциальными.
Движение геометрического образа тела по отношению к выбранной системы отсчета считается известным, если можно определить его положение относительно этой системы в любой произвольный момент времени. Зависимость параметров, характеризующих положение геометрического образа относительно системы отсчета, от времени определяется соответствующими уравнениями, которые называют законом движения тела.
Поскольку движение геометрического образа тела будет известным, когда будет известен закон движения всех его точек, изучению движения любого геометрического образа, предшествует изучению движения одной его точки. Эта логика лежит в основе разделения кинематики на такие разделы, как кинематика точки, кинематика твердого тела и кинематика совокупности твердых тел и точек.
Три способа задания движения точки
Основной задачей кинематики точки являются изучение зависимости между произвольными положениями подвижной точки в пространстве и времени. Эта зависимость определяет закон движения точки. Закон движения точки считается известным, если можно определить положение точки в пространстве в любой момент времени. Для определения положения точки в пространстве выбирают некоторую систему отсчета (систему координат). Линия, которую описывает точка при своем движении, называется траекторией. Если траектория точки — прямая линия, то движение точки называется прямолинейным, если траектория точки кривая, то — криволинейным. Движение точки относительно выбранной системы отсчета считают заданным, если известно, с помощью какого способа можно определить положение точки в любой момент времени. Основными пространственно-временными (кинематическими) характеристиками движения точки являются ее положение, скорость и ускорение. Исходя из этого, основная задача кинематики точки заключается в нахождении способов задания ее положения и методов определения скорости и ускорение. Движение точки можно определить тремя способами: векторным, координатным и натуральным.
Векторный способ
Положение точки можно определить с помощью радиуса- вектора  (рис. 7.1), проведенного с некоторой заданной неподвижной точки О в данную точку М. При движении точки радиус-вектор
(рис. 7.1), проведенного с некоторой заданной неподвижной точки О в данную точку М. При движении точки радиус-вектор  меняется по величине и направлению. Каждому моменту времени t соответствует определенное значение
меняется по величине и направлению. Каждому моменту времени t соответствует определенное значение  . Итак,
. Итак,  является функцией времени t,
является функцией времени t, 
Функцию  считают однозначной, потому что рассматриваемая точка в данный момент времени может находиться только в одном месте пространства. Кроме того,
считают однозначной, потому что рассматриваемая точка в данный момент времени может находиться только в одном месте пространства. Кроме того,  должна быть непрерывной функцией. В большинстве задач механики эта функция дважды дифференцированная функция времени t. Уравнения
должна быть непрерывной функцией. В большинстве задач механики эта функция дважды дифференцированная функция времени t. Уравнения  называется кинематическим уравнением движения точки в векторной форме. Это уравнение выражает закон движения точки, а также уравнение траектории точки в векторной форме.
называется кинематическим уравнением движения точки в векторной форме. Это уравнение выражает закон движения точки, а также уравнение траектории точки в векторной форме.

Кривую, которую описывает конец любого вектора при условии, что начало его находится
все время в одной и той же точке, называют годографом вектора. Итак, траектория точки является годографом радиус-вектора  .
.
Координатный способ
Этот способ определения движения точки заключается в том, что задаются координаты точки как функции времени (Рис. 7.1):
 (7.1)
(7.1)
Между векторным и координатным способами задания движения существует такая связь:
 (7.2)
(7.2)
где  — орты (единичные вектора), соответственно направленные по осям координат
— орты (единичные вектора), соответственно направленные по осям координат 
 (рис. 7.1).
(рис. 7.1).
На том же основании, что и  функции
функции  однозначные, непрерывные и имеют непрерывные производные.
однозначные, непрерывные и имеют непрерывные производные.
Уравнение (7.1) является также уравнением траектории точки в параметрической форме. Исключив из уравнения (7.1) параметр  , получим уравнение траектории в явной форме. Отметим, что кроме декартовой системы координат могут применяться и другие — криволинейные системы координат, в частности полярные, цилиндрические, сферические, тому подобное,
, получим уравнение траектории в явной форме. Отметим, что кроме декартовой системы координат могут применяться и другие — криволинейные системы координат, в частности полярные, цилиндрические, сферические, тому подобное,
Если движение точки задано в полярных координатах (рис. 7.2), то в этом случае следует
задать как функции времени координаты  и
и  :
:
 (7.3)
(7.3)
где  — полярный радиус,
— полярный радиус,  — угол между полярной осью и полярным радиусом. Исключив параметр
— угол между полярной осью и полярным радиусом. Исключив параметр  из уравнения (7.3) получим:
из уравнения (7.3) получим:
 (7.4)
(7.4)
В трехмерном пространстве применяются также цилиндрические (рис. 7.3) и сферические
(рис. 7.4) координаты. Уравнения движения точки в цилиндрических координатах имеет вид:
 (7.5)
(7.5)

В сферических координатах положение точки определяется полярным радиусом  , углами
, углами  и
и  (полюсный угол), а уравнение движения точки имеет вид:
(полюсный угол), а уравнение движения точки имеет вид:
 (7.6)
(7.6)
Переход от декартовых координат к полярным, цилиндрическим, сферическим и наоборот иметь вид (рис. 7.2-7.4): полярные:
 (7.7)
(7.7)
цилиндрические:
 (7.8)
(7.8)
сферические:
 (7.9)
(7.9)
Отметим, что во всех приведенных тут криволинейных координатах 
Натуральный способ
Если траектория точки известна заранее (например, траектория движения поезда, трамвая, троллейбуса и т.п.), то для определения закона ее движения в пространстве достаточно задать положение точки на траектории. Поэтому одну из точек  на траектории берут за начало отсчета дуговых координат, поскольку положение подвижной точки М определяется ее ориентировочным расстоянием s, которое отсчитывается по дуге траектории от выбранной точки отсчета (рис. 7.5). Итак, s является функцией времени:
на траектории берут за начало отсчета дуговых координат, поскольку положение подвижной точки М определяется ее ориентировочным расстоянием s, которое отсчитывается по дуге траектории от выбранной точки отсчета (рис. 7.5). Итак, s является функцией времени: 

Приведенное уравнение определяет закон движения точки по траектории. Функция  будет однозначной, непрерывной и дифференцируемой. Заметим, что дуговая координата точки s в общем случае отличается от пути
будет однозначной, непрерывной и дифференцируемой. Заметим, что дуговая координата точки s в общем случае отличается от пути  , который прошла точка по траектории. Если промежуток времени
, который прошла точка по траектории. Если промежуток времени , в течение которого движется точка, разбить на малые промежутки времени
, в течение которого движется точка, разбить на малые промежутки времени  , в каждом из которых точка движется в одном направлении, то путь
, в каждом из которых точка движется в одном направлении, то путь  , пройденный точкой, можно вычислить по формуле:
, пройденный точкой, можно вычислить по формуле:
 (7.10)
(7.10)
Если движение точки задано координатным способом, то пройденный путь определяется
формулою:
 (7.11)
(7.11)
поскольку модуль дифференциала дуги:

Уравнения  называют уравнением пройденного пути. Кривая, построенная на плоскости
называют уравнением пройденного пути. Кривая, построенная на плоскости  , что выражает зависимость
, что выражает зависимость называется графиком пути, а кривая
называется графиком пути, а кривая  на плоскости
на плоскости  — графиком движения (рис. 7.6).
— графиком движения (рис. 7.6).

Скорость движения точки
Важной характеристикой движения точки является ее скорость. Понятие скорости точки в
равномерном прямолинейном движении относится к элементарным понятиям.
Движение точки называется равномерным, если приращения радиус-вектора точки за одинаковые промежутки времени будут равными между собой. Для равномерного прямолинейного движения:
 (7.12)
(7.12)
где  — постоянный вектор, который называется средней скоростью движения точки за
— постоянный вектор, который называется средней скоростью движения точки за
промежуток времени  . Из соотношения (7.12) видно, что скорость равномерного прямолинейного движения является физической величиной, и определяет перемещение точки за единицу времени:
. Из соотношения (7.12) видно, что скорость равномерного прямолинейного движения является физической величиной, и определяет перемещение точки за единицу времени: Направление вектора
Направление вектора  приведено на рис. 7.7.
приведено на рис. 7.7.
Рассмотрим теперь неравномерное криволинейное движение точки.
Пусть точка М произвольно движется по некоторой кривой и в момент времени  занимает положение М, а через довольно короткий промежуток времени
занимает положение М, а через довольно короткий промежуток времени  она занимает положение
она занимает положение  (рис. 7.8). Положение точки М определяется радиусом- вектором
(рис. 7.8). Положение точки М определяется радиусом- вектором  , а положение точки
, а положение точки  — радиус-вектором
— радиус-вектором Вектор перемещения точки
Вектор перемещения точки  можно получить также как результат некоторого фиктивного равномерного прямолинейного движения точки из
можно получить также как результат некоторого фиктивного равномерного прямолинейного движения точки из  в
в  , которое характеризуется средней скоростью:
, которое характеризуется средней скоростью:


Направление вектора  совпадает с направлением вектора
совпадает с направлением вектора  (рис. 7.8). Очевидно,
(рис. 7.8). Очевидно,
что средняя скорость лишь приближенно отражает характер истинного движения точки.
Чтобы получить скорость  в данный момент времени или в данной точке, следует перейти к пределу:
в данный момент времени или в данной точке, следует перейти к пределу:
 (7.13)
(7.13)
Следовательно, скорость точки равна первой производной радиус-вектора точки по времени. За единицу скорости берут 1 м/с. Скорости точки можно дать и другое определение. Скоростью точки в некоторый момент времени t называется физическая величина, которая зависит от времени и позволяет приближенно определить перемещение  при достаточно малом промежутке времени, как результат прямолинейного и равномерного движения. Действительно, если
при достаточно малом промежутке времени, как результат прямолинейного и равномерного движения. Действительно, если  разложить в ряд Тейлора в точке М, получим:
разложить в ряд Тейлора в точке М, получим:
 (7.14)
(7.14)
Отсюда, ограничившись величинами первого порядка малость и перейдя к пределу, получим формулу (7.13) для скорости.
Скорость точки в прямоугольной декартовой системе координат
Если движение точки задано координатным способом  , то скорость точки определяется ее проекциями на оси координат. Действительно, разложив вектор скорости и радиус-вектор по ортах координатных осей (рис. 7.9), получим
, то скорость точки определяется ее проекциями на оси координат. Действительно, разложив вектор скорости и радиус-вектор по ортах координатных осей (рис. 7.9), получим
 (7.15)
(7.15)
где х, у, z — координаты подвижной точки;  ,
,  — проекции скоростей на оси координат.
— проекции скоростей на оси координат.
По определению скорости в соответствии с формулой (7.13) имеем:
 (7.16)
(7.16)
Подставив в формулу (7.16) значение  из (7.15), получим:
из (7.15), получим:
 (7.17)
(7.17)
откуда:
 (7.18)
(7.18)
Итак, проекции скорости на оси координат равны первым производным по времени
от соответствующих координат точки.
Модуль скорости:
 (7.19)
(7.19)

или

 (7.20)
(7.20)
Направление скорости находим по направляющим косинусам:
 (7.21)
(7.21)
При движении точки ее скорость в общем случае изменяется во времени. Каждому моменту времени соответствует определенный вектор скорости, направленный по касательной к траектории. Рассмотрим ряд положений точки на траектории, обозначив соответствующие значения ее скорости через  (рис. 7.10, а). Выберем произвольную неподвижную точку О (рис. 7.10, б) и перенесем все векторы скорости параллельно самим себе так, чтобы их начала совпадали с точкой А. Поскольку вектор
(рис. 7.10, а). Выберем произвольную неподвижную точку О (рис. 7.10, б) и перенесем все векторы скорости параллельно самим себе так, чтобы их начала совпадали с точкой А. Поскольку вектор  меняется со временем непрерывно, то концы перенесенных векторов
меняется со временем непрерывно, то концы перенесенных векторов  образуют сплошную кривую, которая называется годографом вектора скорости.
образуют сплошную кривую, которая называется годографом вектора скорости.
Зная проекции скорости  на оси декартовой системы координат, которые являются координатами точек на годограф, то есть:
на оси декартовой системы координат, которые являются координатами точек на годограф, то есть:

получим в параметрической форме уравнения годографа вектора скорости. Исключив
параметр t из этих уравнений, найдем уравнение годографа вектора скорости в явной форме.

Скорость точки в полярных координатах
Если движение точки в плоскости Оху задано в полярных координатах  то, согласно (7.7),
то, согласно (7.7),
 (7.22)
(7.22)
Дифференцируя затем х и у, найдем проекции скорости  на оси декартовой системы координат:
на оси декартовой системы координат:
 (7.23)
(7.23)
где  — проекция скорости на радиальное направление,
— проекция скорости на радиальное направление,  — проекция скорости на трансверсальное направление (рис. 7.11), перпендикулярное к радиальному.
— проекция скорости на трансверсальное направление (рис. 7.11), перпендикулярное к радиальному.
При этом модуль скорости:
 (7.24)
(7.24)
Выражение для скорости в полярных координатах можно получить и иначе — введением ортов  (рис. 7.11).
(рис. 7.11).

Радиус-вектор  который определяет положение точки, может быть подан в виде
который определяет положение точки, может быть подан в виде При движении меняется как направление
При движении меняется как направление  , так и величина радиуса-вектора
, так и величина радиуса-вектора  поэтому, по определению скорости (7.13), имеем:
поэтому, по определению скорости (7.13), имеем:
 (7.25)
(7.25)
Для определения производной единичного вектора  воспользуемся выражениями единичных векторов
воспользуемся выражениями единичных векторов  и
и  через единичные векторы
через единичные векторы и
и неподвижных координатных осей (рис. 7.11):
неподвижных координатных осей (рис. 7.11):
 (7.26)
(7.26)
Продифференцировав соотношение (7.26) и учитывая, что  и
и  , найдем:
, найдем:
 (7.27)
(7.27)
Воспользовавшись соотношением (7.27), подадим выражение для скорости в виде:
 (7.28)
(7.28)
Итак, найдены проекции скорости на радиальное  и трансверсальное
и трансверсальное  направления.
направления.
Спроектировав их на координатные оси с помощью двух соотношений (7.26), получим выражение (7.23).
Скорость точки при натуральном способе заданный движения
Как уже отмечалось, движение точки является заданным в натуральной форме, если известны ее траектория и закон (уравнения) движения по траектории  (см. рис. 7.5). Каждой точке траектории соответствует определенный радиус-вектор
(см. рис. 7.5). Каждой точке траектории соответствует определенный радиус-вектор  (рис. 7.12), который можно рассматривать как сложную функцию времени
(рис. 7.12), который можно рассматривать как сложную функцию времени  поэтому формулу (7.13) для скорости представим в виде:
поэтому формулу (7.13) для скорости представим в виде:

 (7.29)
(7.29)
Рассмотрим вектор  Поскольку
Поскольку  то модуль
то модуль 
Вектор  (рис. 7.12) направленный по секущей
(рис. 7.12) направленный по секущей  предельное положение которой является касательной к траектории исследуемой точки.
предельное положение которой является касательной к траектории исследуемой точки.
Итак,  (7.30)
(7.30)

С учетом (7.30) получим следующее выражение для скорости при натуральном способе задания движения точки:
 (7.31)
(7.31)
Умножив скалярно обе части выражения (7.31) на орт  получим
получим 
 Поскольку
Поскольку  то
то  Скалярное произведение в правой части этого выражения равно проекции скорости на касательную к траектории точки, то есть:
Скалярное произведение в правой части этого выражения равно проекции скорости на касательную к траектории точки, то есть:
 (7.32)
(7.32)
Следовательно, вектор скорости точки при натуральном способе задания движения точки, будет иметь вид:
 (7.33)
(7.33)
Если  , то точка движется в положительном направлении, если
, то точка движется в положительном направлении, если  то в отрицательном.
то в отрицательном.
Секторная скорость
Секторная скорость  характеризует степень изменение во времени площади S, описанной радиус-вектором
характеризует степень изменение во времени площади S, описанной радиус-вектором  подвижной точки (рис. 7.12), Пусть в момент времени t точка занимает положение М, которое определяется радиусом-вектором
подвижной точки (рис. 7.12), Пусть в момент времени t точка занимает положение М, которое определяется радиусом-вектором  , а через промежуток времени
, а через промежуток времени  — положение
— положение  , радиус-вектор которого равна
, радиус-вектор которого равна  . Элементарная площадь
. Элементарная площадь  , образованная при этом, равна модулю векторного произведения:
, образованная при этом, равна модулю векторного произведения:
 (7.34)
(7.34)
или 
Если ввести вектор  , равный элементарной площади и направленный перпендикулярно к плоскости
, равный элементарной площади и направленный перпендикулярно к плоскости  , то очевидно, что:
, то очевидно, что:
 (7.35)
(7.35)
откуда по определению секторной скорости  , поделив обе части выражения (7.35) на
, поделив обе части выражения (7.35) на  , получим:
, получим:
 (7.36)
(7.36)
или, с учетом (7.13):
 (7.37)
(7.37)
Тогда величина секторной скорости:
 (7.38)
(7.38)
Понятие секторной скорости впервые ввел И. Кеплер при выводе второго закона
движения планет вокруг Солнца. Второй закон Кеплера имеет место и при движении искусственных спутников вокруг Земли. Согласно этому закону радиусы-векторы планет, проведенные из центра Солнца, описывают за равные промежутки времени равные площади, то есть скорость есть величина постоянная.
Итак, секторная скорость равна половине векторного произведения радиуса-вектора на скорость
на скорость  подвижной точки. Векторному равенству (7.37) соответствуют три скалярные равенства в декартовой системе координат
подвижной точки. Векторному равенству (7.37) соответствуют три скалярные равенства в декартовой системе координат  (рис. 7.9):
(рис. 7.9):

 (7.39)
(7.39)
Площадь сектора  (рис. 7.12) можно выразить иначе:
(рис. 7.12) можно выразить иначе:
 (7.40)
(7.40)
где  — малый угол между
— малый угол между  и
и  (
(
 ).
).
Пренебрегая величинами второго порядка малости, последней формуле придадим вид:
 (7.41)
(7.41)
Поделив обе части этого равенства на  и перейдя к пределу, получим такое соотношение дня определения секторной скорости:
и перейдя к пределу, получим такое соотношение дня определения секторной скорости:

 (7.42)
(7.42)
Последняя формула выражает секторную скорость в полярных координатах и широко используется в небесной механике и при изучении движения искусственных спутников
Земли.
Ускорение точки
Ускорением точки в инерциальной системе отсчета называют меру изменения скорости точки, которая равны производной скорости этой точки по времени.
Рассмотрим два любых близкие положение точки  и
и  на траектории. Скорость в точке М обозначим через
на траектории. Скорость в точке М обозначим через  , а в точке
, а в точке  — через
— через  (рис. 7.13). Геометрическое приращение вектора скорости
(рис. 7.13). Геометрическое приращение вектора скорости  за промежуток времени
за промежуток времени  найдем, построив в точке М вектор, равный
найдем, построив в точке М вектор, равный  , и соединив концы векторов
, и соединив концы векторов  и . Отношение
и . Отношение  к
к  является средним ускорением
является средним ускорением  точки за промежуток времени
точки за промежуток времени  :
:
 (7.42)
(7.42)
Направление вектора  совпадает с направлением
совпадает с направлением  (рис. 7.13).
(рис. 7.13).
Переходя в (7.43) к пределу  ,найдем ускорение
,найдем ускорение  точки в данный момент времени:
точки в данный момент времени:
 (7.44)
(7.44)
С учетом выражения (7.13) формулу ускорения запишем в виде:
 (7.45)
(7.45)


Единицей ускорения в  является
является  .Поскольку ускорение данной точки равно первой производной скорости по времени, то оно направлено по касательной к годографу скорости (рис. 7.14).
.Поскольку ускорение данной точки равно первой производной скорости по времени, то оно направлено по касательной к годографу скорости (рис. 7.14).
Определение ускорения в прямоугольной декартовой системе координат
Если движение точки задано координатным способом, то есть уравнениями 
 то, разложив векторы
то, разложив векторы  и
и  по ортах координатных осей, получим:
по ортах координатных осей, получим:
 (7.46)
(7.46)
где  — проекции ускорения на оси координат. На основании (7.45)
— проекции ускорения на оси координат. На основании (7.45)



 (7.47)
(7.47)
Откуда:
 (7.48)
(7.48)
Итак, проекции ускорения на недвижимые оси координат равны первым производным соответствующих проекций скорости по времени на те же оси, или вторым производным, соответствующих координат подвижной точки по времени.
Модуль ускорения и его направляющие косинусы запишем в виде:

 (7.49)
(7.49)
 (7.50)
(7.50)
Ускорение точки в полярных координатах
Пусть движение точки М в плоскости Оху задано в полярных координатах 
(рис. 7.15). Декартовые координаты выражаются через полярные по формулам 
 Найдем проекции
Найдем проекции  и
и  ускорения
ускорения  точки на радиальный и трансверсальный направления (рис. 7.15). Выразим сначала проекции ускорения
точки на радиальный и трансверсальный направления (рис. 7.15). Выразим сначала проекции ускорения  и
и  на оси декартовых координат через проекции ускорения на радиальное
на оси декартовых координат через проекции ускорения на радиальное  и трансверсальное
и трансверсальное  направления:
направления:
 (7.51)
(7.51)
Учитывая зависимость между полярными и декартовыми координатами, получим:




 (7.52)
(7.52)
Сравнивая соответствующие выражения для  и
и  найдем:
найдем:
 (7.53)
(7.53)
Модуль ускорения определим по формуле:

 (7.54)
(7.54)
Обозначив через  угол, образованный ускорением
угол, образованный ускорением  с ортом
с ортом  (рис. 7.15), определим направление ускорения
(рис. 7.15), определим направление ускорения  точки по формуле:
точки по формуле:
 (7.55)
(7.55)

Заметим, что формулы (7.53) можно также получить непосредственным дифференцированием выражения (7.28) для скорости  , воспользовавшись соотношениями (7.27).
, воспользовавшись соотношениями (7.27).
Ускорение точки при натуральном способе задания движения
Предварительно приведем некоторые сведения из дифференциальной геометрии.
Натуральные оси и натуральный трехгранник. Кинематические характеристики движения точки тесно связаны с геометрическими свойствами траектории. Как известно из дифференциальной геометрии, в каждой точке кривой есть три взаимно перпендикулярных направления: касательная, главная нормаль и бинормаль, единичные вектора (или орты) которых обозначим соответственно  Орт
Орт  направлен в сторону положительного отсчета дуговой координаты
направлен в сторону положительного отсчета дуговой координаты  и, орт
и, орт  — в сторону вогнутости траектории, орт
— в сторону вогнутости траектории, орт  направлен так, чтобы
направлен так, чтобы  образовывали правую систему координат. Указанные оси (касательная, главная нормаль и бинормаль) называются натуральными.
образовывали правую систему координат. Указанные оси (касательная, главная нормаль и бинормаль) называются натуральными.
Итак, натуральные оси — это подвижные оси, связанные с подвижной точкой М, образующие правую прямоугольную систему координат (натуральный трехгранник) (рис. 7.16). Плоскость, проходящая через главную нормаль  и бинормаль
и бинормаль  , называется нормальной. Координатная плоскость, проходящая через касательную
, называется нормальной. Координатная плоскость, проходящая через касательную  и главную нормаль
и главную нормаль  , называется соприкасающейся, а плоскость, проходит через касательную
, называется соприкасающейся, а плоскость, проходит через касательную  и бинормаль
и бинормаль  , -спрямляющей (рис. 7.16). Если рассматриваемая кривая является плоской, то она расположена в соприкасающейся плоскости.
, -спрямляющей (рис. 7.16). Если рассматриваемая кривая является плоской, то она расположена в соприкасающейся плоскости.

Кривизна кривой. Угол, образует дугу  между двумя касательными в двух любых точках М и
между двумя касательными в двух любых точках М и  на кривой называется углом смежности. Обозначим его через
на кривой называется углом смежности. Обозначим его через  . Отношение
. Отношение  к элементу дуги
к элементу дуги  называется средней кривизной кривой
называется средней кривизной кривой  на отрезке
на отрезке  (рис. 7.12):
(рис. 7.12):
 (7.56)
(7.56)
Предел этого отношения при  называется кривой
называется кривой  в данной точке:
в данной точке:
 (7.57)
(7.57)
В общем случае кривизна кривой не является постоянной величиной и изменяется от точки
к точке. Величина  , обратная к кривизне в данной точке М, называется радиусом
, обратная к кривизне в данной точке М, называется радиусом
кривизны кривой в этой точке:
 (7.58)
(7.58)
Очевидно, что:
 (7.59)
(7.59)
Ускорение точки при натуральном способе задания движения определяется по теореме.
Теорема. Полное ускорение точки равно векторной сумме касательного (тангенциального) и нормального ускорений.
Доказательство. Пусть движение точки задано натуральным способом. Тогда вектор скорости подадим в виде (7.33). Учитывая это и соблюдая определения ускорения при векторном способе задания движения точки, получим:
 (7.60)
(7.60)
Первое слагаемое является вектором, направленным по касательной  , он называется касательной, или тангенциальной составляющей ускорения и обозначается
, он называется касательной, или тангенциальной составляющей ускорения и обозначается  . Итак,
. Итак,
 (7.61)
(7.61)
Как следует из (7.61), касательное ускорение характеризует изменение скорости по величине и равно первой производной от проекции скорости на касательную или второй производной от дуговой координаты по времени. Чтобы определить второе слагаемое, представим его в виде:
 (7.62)
(7.62)

Рассмотрим предварительно тождество  и продифференцируем его по
и продифференцируем его по  , получим
, получим  . С этого выплывает, что вектора
. С этого выплывает, что вектора  и
и  — перпендикулярные. Поскольку вектор
— перпендикулярные. Поскольку вектор  всегда направленным в сторону вогнутости траектории (рис. 7.17, а) и лежит в
всегда направленным в сторону вогнутости траектории (рис. 7.17, а) и лежит в
соприкасающихся плоскостях, то вектор  так же лежит в соприкасающейся плоскости, направленный в сторону вогнутости траектории и перпендикулярный к
так же лежит в соприкасающейся плоскости, направленный в сторону вогнутости траектории и перпендикулярный к  , то есть направленный по главной нормали
, то есть направленный по главной нормали  к центру кривизны траектории.
к центру кривизны траектории.
Определим теперь модуль вектора  С равнобедренного треугольника
С равнобедренного треугольника  (рис. 7.17, а) выплывает, что
(рис. 7.17, а) выплывает, что  где
где  — угол смежности. Тогда:
— угол смежности. Тогда:
Следовательно:
 (7.63)
(7.63)
Таким образом, с учетом (7.62) и (7.63) второе слагаемое выражения (7.60) будет выглядеть так:

и называется нормальным ускорением и обозначается  , то есть:
, то есть:
 (7.64)
(7.64)
Отсюда следует, что нормальное ускорение  направлено в сторону вогнутости траектории к центру кривизны, и характеризует изменение скорости по направлению.
направлено в сторону вогнутости траектории к центру кривизны, и характеризует изменение скорости по направлению.
Поскольку составляющие вектора  и
и  лежат в соприкасающейся плоскости, то и вектор
лежат в соприкасающейся плоскости, то и вектор  так же расположен в соприкасающейся плоскости. Поэтому проекция полного ускорения
так же расположен в соприкасающейся плоскости. Поэтому проекция полного ускорения  на бинормаль
на бинормаль  Итак, на основании (7.60), (7.61) и (7.64) (рис. 7.17, б) окончательно получим:
Итак, на основании (7.60), (7.61) и (7.64) (рис. 7.17, б) окончательно получим:
 (7.65)
(7.65)
что и нужно было доказать.
Модуль полного ускорения:
 (7.66)
(7.66)
Направление вектора  по углу
по углу  , который образуется между вектором
, который образуется между вектором  и вектором
и вектором 

Если движение точки задано координатным способом, то, воспользовавшись выражениями (7.64) и (7.66), нетрудно получить следующее выражение для радиуса кривизны:

 (7.67)
(7.67)
Заметим так же, что выражение (7.61) для касательного ускорения, можно представить в таком виде:


С учетом последнего выражения (7.67) для радиуса кривизны можно записать так:

 (7.68)
(7.68)
В случае плоского движения, когда  и
и  формула (7.68) приобретает очень простую форму:
формула (7.68) приобретает очень простую форму:
 (7.69)
(7.69)
Если движение задано в полярной системе координат, то можно убедиться, что формулу для кривизны траектории можно записать в виде:
 (7.70)
(7.70)
Приведем еще формулу для радиуса кривизны в случае, когда уравнение плоской кривой задано в явной форме 
 (7.71)
(7.71)
В завершении приведем формулы Френе, которые дают возможность установить связь между ортами  и радиус-вектором
и радиус-вектором  .
.
В параграфе 7.7. выражение (7.30) (рис. 7.12) дает соотношение:
Из последней формулы и выражения (7.63) получим: 
Поскольку бинормаль  перпендикулярная к нормали
перпендикулярная к нормали  , и касательной
, и касательной  то очевидно:
то очевидно:

Приведенные соотношения и являются формулами Френе.
Отдельные случаи движения точки
Прямолинейное движение. Если во время движения точки нормальное ускорение  равно нулю, то движение точки будет прямолинейным. Действительно, если
равно нулю, то движение точки будет прямолинейным. Действительно, если  ,то
,то  и
и  то есть траекторией является прямая. В этом случае полное ускорение равно касательному:
то есть траекторией является прямая. В этом случае полное ускорение равно касательному: 
Если при криволинейном движении точки в данный момент времени нормальное ускорение равна нулю  , то точка в этот момент времени находится в точке перегиба траектории.
, то точка в этот момент времени находится в точке перегиба траектории.
Равномерное криволинейное движение. Если во время движения точки касательное ускорение равна нулю  , то проекция скорости
, то проекция скорости  не меняется. Действительно
не меняется. Действительно В этом случае точка движется равномерно по кривой, а полное ускорение точки равно нормальному:
В этом случае точка движется равномерно по кривой, а полное ускорение точки равно нормальному: 
Равномерное прямолинейное движение. Если во время движения точки ее ускорение равно нулю  , то движение является равномерным и прямолинейным, поскольку скорость в этом случае не меняется ни по величине, ни по направлением.
, то движение является равномерным и прямолинейным, поскольку скорость в этом случае не меняется ни по величине, ни по направлением.
Равнопеременное криволинейное движение. Если во время движения точки по некоторой кривой, касательное ускорение будет постоянным по величине  то движение точки называется равнопеременным криволинейным движением. Причем, если ускорение
то движение точки называется равнопеременным криволинейным движением. Причем, если ускорение  совпадает с направлением скорости, то движение точки называется равноускоренным, если
совпадает с направлением скорости, то движение точки называется равноускоренным, если  направлено в сторону, противоположную скорости, — равнозамедленным.
направлено в сторону, противоположную скорости, — равнозамедленным.
Найдем скорость и закон движения точки  в случае равномерного движения. Поскольку
в случае равномерного движения. Поскольку  то
то  Постоянную интегрирования определим из начальных условий движения: при
Постоянную интегрирования определим из начальных условий движения: при  Следовательно,
Следовательно,  Подставив значение
Подставив значение  получим
получим 
Поскольку  то
то 
 Отсюда путем интегрирования найдем закон движения точки:
Отсюда путем интегрирования найдем закон движения точки:

Постоянную интегрирования  определим из начальных условий движения: при
определим из начальных условий движения: при  Следовательно,
Следовательно,  Поэтому:
Поэтому: 
Прямолинейные гармонические колебания точки. Пусть точка движется по прямой, например по оси Ох, и ее расстояние от начала координат меняется по закону:
 (7.72)
(7.72)
где  — постоянные.
— постоянные.
Движение точки является колебательным между положениями точки  и
и  Колебания, которые определяются законом (7.72), называются гармоничными колебаниями. Величина а называется амплитудой колебаний и является крупнейшим отклонением точки от центра колебаний
Колебания, которые определяются законом (7.72), называются гармоничными колебаниями. Величина а называется амплитудой колебаний и является крупнейшим отклонением точки от центра колебаний  А. Промежуток времени
А. Промежуток времени  на протяжении которого точка совершает полное колебание, называется периодом колебаний; величина
на протяжении которого точка совершает полное колебание, называется периодом колебаний; величина  — круговой частотой колебаний (более полно теорию колебаний изложены в части IV)
— круговой частотой колебаний (более полно теорию колебаний изложены в части IV)  — фазой колебаний,
— фазой колебаний,  — начальной фазой колебаний.
— начальной фазой колебаний.
Пример 1. Найти уравнение траектории, скорость, ускорение и радиус кривизны в момент  , если уравнения движения точки имеют следующий вид:
, если уравнения движения точки имеют следующий вид: 
Решение. Уравнение траектории задается в параметрической форме Исключив параметр  найдем
найдем  а это в свою очередь является уравнением траектории в явной форме:
а это в свою очередь является уравнением траектории в явной форме: 
Итак, траекторией точки будет эллипс с полуосями  Поскольку движение точки задано координатным способом, то скорость и ускорение найдем по их проекциями на оси координат:
Поскольку движение точки задано координатным способом, то скорость и ускорение найдем по их проекциями на оси координат:

Определим модули и направления скорости и ускорения:

При 


Аналогично

При 


Радиус кривизны определяется по формуле (7.67):
 где
где


При 
Пример 2. Точка движется по кругу радиусом  м. Закон ее движения по траектории
м. Закон ее движения по траектории  Найти величину скорости, касательного, нормального и полного ускорений точки
Найти величину скорости, касательного, нормального и полного ускорений точки
в момент времени 
Решение. Поскольку движение точки задано натуральным способом, то скорости точки определяются в виде  , а при
, а при  Соответственно касательное и нормальное ускорение
Соответственно касательное и нормальное ускорение 
 при
при  получим
получим 
Полное ускорение точки 

Пример 3. По заданным уравнениям движения точки найти ее траекторию, скорость, ускорение и радиус кривизны.
Решение. Для нахождения траектории точки возведем х и у в квадрат и добавим их,
тогда получим Итак, траекторией движения точки есть круг (рис. 7.18).
Итак, траекторией движения точки есть круг (рис. 7.18).
Для нахождения скорости и ускорения вычислим сначала их проекции на оси:

Теперь легко вычислить величины скорости и ускорения:
Траектория точки показана на рис. 7.18. Очевидно, что радиус кривизны равен радиусу окружности  , то есть
, то есть 
Убедимся в этом с помощью формул. Используем формулу (7.70). В этом случае:
 следовательно
следовательно 

Пример 4. Движимое колесо радиусом  (рис. 7.19, а) катится без скольжения с помощью
(рис. 7.19, а) катится без скольжения с помощью
кривошипа ОА внутри неподвижного колеса радиусом R. Составить уравнение траектории точки М подвижного колеса. Для частного случая  (рис. 7.19, б) определить скорость, ускорение и радиус кривизны траектории точки
(рис. 7.19, б) определить скорость, ускорение и радиус кривизны траектории точки  если кривошип вращается равномерно.
если кривошип вращается равномерно.
Решение. Расположим в точке О начало неподвижных осей  и
и  . Обозначим через
. Обозначим через 
мгновенное значение угла между кривошипом ОА и осью Ох. Поскольку по условиям задачи качения происходит без скольжения, то дуги ВС и CM должны быть равными. Таким образом,
 (1)
(1)
где  — угол поворота движимого колеса.
— угол поворота движимого колеса.

Отметим, что кривошип ОА и движимое колесо вращаются в противоположных направлениях.
Обозначив через  и
и  координаты точки М, получим:
координаты точки М, получим:
 (2)
(2)
Подставив в (2) из (1) выражение  через
через  , найдем необходимый нам закон движения точки М:
, найдем необходимый нам закон движения точки М:

Уравнение (3) представляют собой в параметрической форме уравнения гипоциклоида — кривой, описываемой точкой окружности, катящейся без скольжения внутри второго круга.
Дальнейшее исследование нужно провести для случае  считая, что кривошип ОА вращается равномерно, то есть
считая, что кривошип ОА вращается равномерно, то есть  , где
, где  некоторая постоянная величина, которую называют круговой частотой. В этом случае уравнение (3) приобретают вид:
некоторая постоянная величина, которую называют круговой частотой. В этом случае уравнение (3) приобретают вид:
 (4)
(4)
Дальше получим:

Следовательно, 
 Радиус кривизны найдем по формуле (7.69). Поскольку
Радиус кривизны найдем по формуле (7.69). Поскольку  и
и  знаменатель формулы (7.69) равен нулю, следовательно,
знаменатель формулы (7.69) равен нулю, следовательно,  Это означает, что точка М в этом случае движется по прямой ОВ (рис. 7.19,б).
Это означает, что точка М в этом случае движется по прямой ОВ (рис. 7.19,б).
Криволинейные координаты. Коэффициенты Ламе
Криволинейными координатами точки называется система независимых параметров, однозначно определяющих ее положение. Обозначим криволинейные координаты через  Примером могут быть полярные, сферические или цилиндрические координаты. Так, в случае сферических координат
Примером могут быть полярные, сферические или цилиндрические координаты. Так, в случае сферических координат  В Случае цилиндрических координат
В Случае цилиндрических координат  полярных координат
полярных координат 
Уравнения движения точки в криволинейных координатах будут выглядеть так:
 (7.73)
(7.73)
Эти функции должны быть непрерывными и однозначными и хотя бы дважды дифференцируемыми. Пусть радиус-вектор, определяющий положение точки М, которая задана координатами  проведена с произвольно выбранного центра О (рис. 7.20). тогда:
проведена с произвольно выбранного центра О (рис. 7.20). тогда:
 (7.74)
(7.74)

Проекции радиус-вектора на оси декартовой системы координат также являются функциями 
 то есть:
то есть:
 (7.75)
(7.75)
Если в функциях (7.75) только одна координата  переменная, а две другие имеют фиксированное значение, то получим уравнение координатной линии, которое соответствует изменению координаты
переменная, а две другие имеют фиксированное значение, то получим уравнение координатной линии, которое соответствует изменению координаты  (рис. 7.20):
(рис. 7.20):
 (7.76)
(7.76)
Аналогично определяются координатные линии, соответствующие изменению  и
и  .
.
В каждой точке пространства пересекаются три координатные линии, касательные к которым в указанной точке, проведенные в сторону увеличения координат, называются координатными осями  Координатные оси в общем случае определяют не ортогональную криволинейную систему.
Координатные оси в общем случае определяют не ортогональную криволинейную систему.
Если в уравнениях (7.75) менять две координаты при фиксированной третий, то полученные поверхности называются координатными. Уравнение координатных поверхностей имеют вид:
 (7.77)
(7.77)
Каждое из этих уравнений определяет в соответствии поверхности  . Плоскости, которые касаются в некоторой точке М координатных плоскостей, называются координатами. Координатные оси лежат в соответствующих координатных плоскостях.
. Плоскости, которые касаются в некоторой точке М координатных плоскостей, называются координатами. Координатные оси лежат в соответствующих координатных плоскостях.
Определим теперь орты  координатных осей. Для этого рассмотрим движение точки по координатной линии, соответствующей изменению координаты
координатных осей. Для этого рассмотрим движение точки по координатной линии, соответствующей изменению координаты  . Пусть в момент
. Пусть в момент
времени t точка находится в положении  (Рис. 7.21). Вектор,
(Рис. 7.21). Вектор, вычисленный в точке
вычисленный в точке 
направленный по касательной к координатной линии  то есть он направлен по координатной оси
то есть он направлен по координатной оси  в сторону увеличения
в сторону увеличения  . Поскольку:
. Поскольку:

то

Отсюда единичный вектор 
Аналогично можно получить формулы для  и
и  . Следовательно, единичные вектора криволинейной координатной системы
. Следовательно, единичные вектора криволинейной координатной системы  определяются по формулам:
определяются по формулам:
 (7.78)
(7.78)
где
 (7.79)
(7.79)
Как видно из формул (7.79),  являются функциями криволинейных координат
являются функциями криволинейных координат  и
и
называются коэффициентами Ламе или дифференциальными параметрами Ламе.
Применяя формулы (7.78), можно определить косинусы криволинейных координатных осей с осями декартовых координат. Действительно, введя единичные вектора декартовых координатных осей  получим:
получим:



 (7.80)
(7.80)


Будем рассматривать только ортогональные криволинейные координаты, координатные оси которых взаимно перпендикулярны. Условиями ортогональности является равенство нулю скалярных произведений единичных векторов, то есть  или:
или:

 (7.81)
(7.81)
Покажем, что коэффициенты Ламе являются множителями при дифференциалах координат в выражениях дифференциалов дуг соответствующих координатных линий. Действительно, найдем формулу, по которой определяется дифференциал дуг кривой в системе ортогональных координат. Для этого сначала определим элементарное перемещение:
 (7.82)
(7.82)
Тогда


или, учитывая ортогональность криволинейных координат (7.81), получим:
 (7.83)
(7.83)
поскольку  согласно (7.78)
согласно (7.78)
На основании полученной формулы легко перейти к определению коэффициентов Ламе. Получим:
 (7.84)
(7.84)
Последние выражения можно получить, поочередно предполагая изменение только одной криволинейной координаты и считая две другие фиксированными.
Пример 5. Определить коэффициенты Ламе, если движение точки задано в цилиндрической (рис. 7.3) или в сферической (рис. 7.4)
или в сферической (рис. 7.4)  системах координат.
системах координат.
Решение. В цилиндрической системе координат получим: 
Следовательно,  Аналогично в сферической системе координат
Аналогично в сферической системе координат 
 Отсюда
Отсюда 
Скорость и ускорение точки в криволинейных координатах
На основании (7.13) и с учетом зависимости (7.74) получим следующее выражение для скорости в криволинейных координатах:

 (7.85)
(7.85)
Из формулы (7.78) получим

С учетом этих соотношений получим
 (7.86)
(7.86)
Это равенство можно рассматривать как разложение скорости по единичным ортах осей
криволинейной системы координат, то есть:
 (7.87)
(7.87)
Поскольку рассматривается случай ортогональной криволинейной системы координат,
то модуль скорости находим по формуле:
 (7.88)
(7.88)
Для определения ускорения точки в криволинейных координатах найдем сначала проекции вектора ускорения на координатные оси, учитывая соотношение (7.78):
 (7.89)
(7.89)
Не тяжело убедиться, что правую часть этих равенств можно представить в виде:

 (7.90)
(7.90)
Для дальнейшего преобразования формулы (7.90) получим очевидные тождества, которые вытекают из выражений (7.86) и (7.78):

или
 (7.91)
(7.91)
Продифференцировав по времени выражение  как сложную функцию переменных
как сложную функцию переменных 


 (7.92)
(7.92)
Определив затем из выражения (7.85) частные производные  и сравнив их с последними соотношениями (7.92), получим такие тождества:
и сравнив их с последними соотношениями (7.92), получим такие тождества:
 (7.93)
(7.93)
Подставив в (7.90) значение  с тождества (7.91) и
с тождества (7.91) и  (7.93), получим:
(7.93), получим:
 (7.94)
(7.94)
Преобразуем дальше скалярные произведения  и
и  к виду:
к виду:
 (7.95)
(7.95)
Подставив соотношения (7.95) в (7.94), найдем проекции ускорений точки на оси криволинейной системы координат:

 (7.96)
(7.96)
Введем сокращенное обозначение, согласно (7.88),
 (7.97)
(7.97)
окончательно получим:
 (7.98)
(7.98)
Отметим, что как будет показано в динамике, выражение  в данном случае является кинетической энергией единичной массы, а выражение
в данном случае является кинетической энергией единичной массы, а выражение  — левой частью уравнения Лагранжа второго рода.
— левой частью уравнения Лагранжа второго рода.
Пример 6. Движение точки задано в цилиндрической системе координат  Найти выражения для ускорения и скорости точки.
Найти выражения для ускорения и скорости точки.
Решение. Учитывая связь декартовых координат с цилиндрическими, получим По формулам (7.84) найдем коэффициенты Ламе. Действительно, поскольку
По формулам (7.84) найдем коэффициенты Ламе. Действительно, поскольку  то
то  Следовательно,
Следовательно, 
 Теперь по формулах (7.87) найдем проекции скоростей:
Теперь по формулах (7.87) найдем проекции скоростей:


откуда 
Затем определим ускорение точки. Для этого составив выражение для функции:

Вычислим  и
и  для того, чтобы воспользоваться формулой (7.98):
для того, чтобы воспользоваться формулой (7.98):

Теперь по формуле (7.98) найдем проекции ускорения на оси заданной криволинейной системы координат:

Пример 7. Найти выражения для скорости и ускорение точки, движение которой задано в сферической системе координат (рис. 7.4).
Решение. Криволинейными координатами в этом случае является 
которые связаны следующими соотношениями с декартовыми: 
Для выражения коэффициентов Ламе, воспользуемся выражениями (7.79). Для этого найдем сначала частные производные 

Подставив эти производные в формулы (7.79), получим:
 (1)
(1)
Дальше по формуле (7.87) получим:
 (2)
(2)
Для нахождения соответствующих проекций ускорения вычислим сначала вспомогательную функцию  по формуле (7.97), воспользовавшись (1):
по формуле (7.97), воспользовавшись (1):

 (3)
(3)
Проведем вспомогательные вычисления согласно операциям формулы (7.98):
 (4)
(4)
Подставив выражения (4) в (7.98), получим:


 (5)
(5)


Выражения (2) и (5) будут решениями этой задачи.
Пример 8. Самолет, который принято за точку, движется относительно земной поверхности, которая принята за сферу радиусом R со скоростью на заданной высоте h так, что ее северная и восточная составляющие соответственно равны  и
и  (рис. 7.22). Найти ускорение самолета относительно Земле, не учитывая ее собственного вращения.
(рис. 7.22). Найти ускорение самолета относительно Земле, не учитывая ее собственного вращения.

Решение. Отметим, что ортогональная система криволинейных координат  является декартовой системой координат, которая жестко связаны с Землей и которую называют географической. Из условий у нас есть:
является декартовой системой координат, которая жестко связаны с Землей и которую называют географической. Из условий у нас есть:
 (1)
(1)
Поскольку самолет летит на одной высоте, то очевидно, что  Подставив (1) в формулы для
Подставив (1) в формулы для  примера 7, получим:
примера 7, получим:







Пример 9. При условиях задачи 8 найти ускорение самолета относительно неподвижной системы координат  с учетом суточного вращения Земли с угловой скоростью
с учетом суточного вращения Земли с угловой скоростью 
Решение. С рис. 7.23 видим, что вращение Земли даст дополнительно две составляющие угловые скорости 
Что касается угловых скоростей, которые характеризуются криволинейными координатами
 то, как видно из рис. 7.23, угловая скорость
то, как видно из рис. 7.23, угловая скорость  направлена по той же оси, что и
направлена по той же оси, что и 
поэтому угловые скорости, характеризующих изменения координат  и
и  , будут иметь вид:
, будут иметь вид:
 (1)
(1)
где 
 (2)
(2)

Итак, для вычисления ускорения самолета в неподвижной системе координат с учетом суточного вращения Земли нужно в формулу примера 7 подставить значение  и
и  , которые определяются выражением (1). В результате получим:
, которые определяются выражением (1). В результате получим:


 (3)
(3)





 (4)
(4)
Выражения (3) и (4) и будут решением задачи.
Основные понятия кинематики
Кинематика изучает движение материальных объектов как моделей реальных тел (точка, твердое тело, материальная система) с геометрической точки зрения, как геометрических образов, без изложения причин, вызывающих это движение. Такой подход не требует учета инерционных и силовых характеристик: масса и момент инерции, сила и момент силы.
Движение является формой существования материального мира, а механическое движение, простейшая форма движения материи — один из результатов взаимодействия материальных тел. Под ним понимают изменение положения тел в пространстве в течении времени по отношению к другому телу, с которым связана система отсчета.
Пространство, в котором происходит движение геометрических моделей в форме
перечисленных материальных объектов, считается абсолютным, метрические
особенности которого независимы от движения в нем материи в разных точках и
направлениях (однородность и изотропность пространства). Такое пространство
воспринимается как трехмерное, так что каждой точке абсолютного пространства
соответствуют, например, в декартовой системе, три координаты. Единицей измерения пространства в Международной системе единиц СИ является метр (1 м). 1 метр — это 
млн. часть длины земного меридиана.
Свойство абсолютного времени — однородность и универсальность, оно одинаково всплывает во всех точках пространства, на всех телах. Поэтому можно
произвольно выбирать начало отсчета времени и измерять интервалы между
отдельными промежутками или моментами времени. Единицей измерения времени является секунда (1 с). 1 секунда — это  тыс. часть суток.
тыс. часть суток.
Под абсолютным пространством и временем вводится понятие системы отсчета. Это совокупность системы координат, неизменно связанной с некоторым телом отсчета, и устройством с периодическим процессом для измерения времени (часы).
Во множественном числе систем отсчета, в которых можно постулировать пространство и время как абсолютные, выбираются так называемые инерциальные системы отсчета, в которых изолированная материальная точка может неограниченно долго находиться в состоянии покоя или равномерного и прямолинейного движения под действием системы
уравновешенных сил.
Если некоторая система отсчета служит за инерциальную с заданной степенью точности, то можно указать бесконечное количество инерциальных систем отсчета, движущихся относительно выбранной системы поступательно, равномерно и прямолинейно.
При решении задач небесной механики, исчислении траекторий спутников принимается гелиоцентрическая система отсчета с началом в центре масс Солнечной системы и осями координат, направленными на неподвижные звезды.
При решении многих технических задач по инерциальную принимают за систему отсчета, связанную с центром Земли (геоцентрическая система отсчета).
Движение геометрической модели относительно выбранной системы отсчета считается известным, если можно определить его положение относительно этой системы в любой момент времени. При этом различают момент времени и промежуток времени. Промежуток времени — это течение времени между двумя физическими явлениями. Момент времени — это граница между двумя смежными промежутками времени.
Положение модели относительно данной системы отсчета определяется
соответствующими параметрами, а ее движение — кинематическими уравнениями,
выражают изменение этих параметров как функций времени.
Основная задача кинематики заключается в том, чтобы по известным кинематическим уравнениям движения определить кинематические характеристики этого движения: траектории точек, их линейные скорости и ускорения; угловые скорости и ускорения тела.
Поскольку каждое тело состоит из материальных точек, то естественно начать кинематику по изучению движения материальной точки.
Кинематика материальной точки
Для того, чтобы изучать движение материальной точки, необходимо выбрать способ его задания. Существует несколько способов задания движения материальной точки.
Кинематически задать движение или закон движения точки значит указать такой способ, позволяющий определить положение этой точки относительно данной системы отсчета в любой момент времени.
Способы задания движения материальной точки
Для задания движения материальной точки можно применить один из трех следующих способов:
1. Векторный;
2. Координатный;
3. Натуральный.
Рассмотрим последовательно указанные способы.
Векторный способ задания движения материальной точки
Этот способ нашел широкое применение в теоретических расчетах. Рассмотрим сущность этого способа.
Предположим, что произвольная материальная точка M движется в пространстве по некоторой траектории AB (рис. 2.1). Возьмем в пространстве прямоугольную декартову систему координат Oxyz с единичными векторами (ортами) на соответствующих осях  ,
,  ,
,  . С начала системы координат точки В проведем к подвижной точке M радиус-вектор
. С начала системы координат точки В проведем к подвижной точке M радиус-вектор  . При движении точки M ее радиус-вектор будет с течением времени изменяться по величине (модулем) и направлением. Таким образом, если будет задан закон изменения радиус-вектора подвижной точки M как функция времени, то движение материальной точки считается заданным векторным способом. Математически это можно записать так:
. При движении точки M ее радиус-вектор будет с течением времени изменяться по величине (модулем) и направлением. Таким образом, если будет задан закон изменения радиус-вектора подвижной точки M как функция времени, то движение материальной точки считается заданным векторным способом. Математически это можно записать так:
= (t),
где t — время.
Соотношение называется кинематическим уравнением движения материальной точки в векторной форме. Одновременно это выражение можно рассматривать как уравнение траектории движения.
Найдем в принятой системе координат Oxyz величину радиус-вектора , для чего спроектируем его на оси координат:
= x(t)  + y(t)
+ y(t)  + z(t)
+ z(t)  ,
,
где x(t), y(t), z(t) — текущие значения координат конца радиус-вектора или координаты подвижной точки M.

Определим кинематические характеристики подвижной точки М.
Траектория движения точки
Траекторией АВ движения материальной точки М является геометрическое место концов радиус-вектора или непрерывная линия, которую описывает точка при своем движении относительно данной системы отсчета.
Введем понятие годографа векторной функции (t) по скалярному аргументу t. Это кривая, которая намечается концом вектора при непрерывном изменении времени t, когда начало вектора остается в фиксированной точке О. То есть, годограф описывает концы векторов  ,
,  , … ,
, … , , что соответствуют конкретным положением точки M в процессе движения. Это касается не только радиус-векторов, а и векторов скоростей, ускорений тому подобное. В данном случае годограф совпадает с траекторией АВ.
, что соответствуют конкретным положением точки M в процессе движения. Это касается не только радиус-векторов, а и векторов скоростей, ускорений тому подобное. В данном случае годограф совпадает с траекторией АВ.
Скорость движения точки
Вторая кинематическая характеристика — скорость движения материальной точки M, показывает, как быстро и в каком направлении меняется ее положение в пространстве.
Скорость — это векторная величина, характеризующая степень изменения перемещения по времени.
Единица измерения скорости —  или
или  .
.
Для определения этой кинематической характеристики рассмотрим движение
материальной точки М. Считаем, что точка М движется по произвольной траектории АВ (рис. 2.1). За некоторый промежуток времени ∆t точка переместилась из положения М в положение M1 (радиус-вектор  ). Для того чтобы определить перемещение точки М за промежуток времени ∆t, соединим точки М и M1 и получим вектор ∆, который является геометрической разницей между векторами и . Тогда средняя скорость точки M за промежуток времени ∆t (согласно определения) равна:
). Для того чтобы определить перемещение точки М за промежуток времени ∆t, соединим точки М и M1 и получим вектор ∆, который является геометрической разницей между векторами и . Тогда средняя скорость точки M за промежуток времени ∆t (согласно определения) равна:

По направлению вектор  будет совпадать с вектором ∆, то есть он расположен вдоль хорды MM1 в сторону движения точки M.
будет совпадать с вектором ∆, то есть он расположен вдоль хорды MM1 в сторону движения точки M.
Если рассмотреть границу средней скорости при условии, что ∆t стремится к нулю (∆t → 0), то скорость точки M в любой момент времени t будет равна:

Таким образом, при векторном способе задания движения материальной точки ее скорость является первой производной от радиус-вектора точки по времени.
Направление вектора скорости  точки — по касательной к траектории и направлен в сторону ее движения.
точки — по касательной к траектории и направлен в сторону ее движения.
Ускорение движения точки
Третья кинематическая характеристика — ускорение движения материальной точки M, показывает, как быстро и в каком направлении меняется ее скорость движения.
Ускорение — это векторная величина, характеризующая степень изменения вектора скорости по времени.
Единица измерения ускорения —  .
.
Определим ускорение материальной точки M. Рассмотрим движение точки по произвольной траектории AB (рис. 2.2). В положении М скорость точки была . За некоторый промежуток времени ∆t точка переместилась в положение М1, а ее скорость изменилась и равна  . Указанные векторы скоростей точки будут направлены по касательным к траектории. Найдем прирост скорости за данный промежуток времени. Для этого перенесем параллельно вектор скорости в положение М. Соединим концы векторов и и получим вектор ∆. Отношение прироста ∆ вектора к промежутку времени ∆t согласно определению ускорения будет средним ускорением подвижной материальной точки М. А именно:
. Указанные векторы скоростей точки будут направлены по касательным к траектории. Найдем прирост скорости за данный промежуток времени. Для этого перенесем параллельно вектор скорости в положение М. Соединим концы векторов и и получим вектор ∆. Отношение прироста ∆ вектора к промежутку времени ∆t согласно определению ускорения будет средним ускорением подвижной материальной точки М. А именно:

Вектор  , будет параллельным вектору ∆.
, будет параллельным вектору ∆.
Для получения мгновенного ускорения материальной точки необходимо рассмотреть бесконечно малый промежуток времени (то есть ∆t → 0), а все выражение свести к границе:


Если подставить в значение скорости точки уравнение выше, то будем иметь:

Таким образом, при векторном способе задания движения материальной точки ее ускорение равно первой производной от скорости движения точки по времени, или второй производной от радиус-вектора точки по времени.
Вектор ускорения  материальной точки будет направлен в сторону вогнутости траектории, то есть к ее центру кривизны. Более подробно о направлении вектора ускорения материальной точки будет дальше.
материальной точки будет направлен в сторону вогнутости траектории, то есть к ее центру кривизны. Более подробно о направлении вектора ускорения материальной точки будет дальше.
Координатный способ задания движения материальной точки
Этот способ задания движения материальной точки широко используется при решении задач, в технических расчетах.
При таком способе задания движения материальной точки заранее задаются координаты материальной точки как функции времени. Если выбрать в пространстве прямоугольную декартову систему координат Oxyz, то при движении точки M все три ее координаты будут меняться со временем (рис. 2.1). Для того, чтобы знать положение точки в любой момент времени, а также для определения ее кинематических характеристик, необходимо задать выражения этих координат как функции времени:
x = x(t),
y = y(t),
z = z(t).
Эти параметрические уравнения, в которых роль параметра играет время t, является
кинематическими уравнениями движения точки в прямоугольной декартовой системе
координат (или законом движения точки в координатной форме) и определяют суть данного способа.
Следует заметить, что если движение материальной точки осуществляется в одной плоскости xOy, то в уравнениях закон изменения координаты z уже не нужен и уравнение приобретает следующий вид:
x = x(t),
y = y(t),
Если материальная точка совершает прямолинейное движение, то достаточно выбрать одну ось координат, например Ox, совместив ее с направлением движения, тогда это движение будет описано одним уравнением:
x = x(t).
Определим кинематические характеристики движения материальной точки при данном способе задания ее движения.
Траектория движения точки
Уравнения выше фактически являются уравнениями траектории движения материальной точки в параметрической форме, в которых, как было сказано выше, роль параметра играет время t. Для нахождения траектории движения в обычной форме необходимо исключить из уравнений движения время t, то есть получить зависимость между самими координатами. Это можно сделать несколькими способами. Например, подстановкой или подъемом обеих частей уравнений квадрату и почленно добавлением (если уравнения содержат тригонометрические функции).
Пример:
Движение материальной точки осуществляется в плоскости xOy и заданный такими уравнениями:
x = 2t, м,
y = 12t2, м,
Определить траекторию движения точки.
Решение.
Траекторию движения материальной точки можно определить одним из двух способов:
а) задать разные моменты времени и изобразить координаты точки х, у на графике;
б) исключить время t из заданных уравнений движения. Так, из первого уравнения время будет равняться t =  . Тогда после подстановки времени во второе уравнение, будем иметь:
. Тогда после подстановки времени во второе уравнение, будем иметь:
y =  = 3x2 .
= 3x2 .
Таким образом, траектории движения точки является парабола с вершиной, которая
расположена в начале координат и осью симметрии yO.
Пример:
Движение материальной точки задано уравнениями:
x = 3sin t см,
y = 3cos t см,
где t — в секундах.
Определить траекторию движения точки.
Решение.
Уравнение траектории движения можно определить, если исключить время t с уравнений движения. Перепишем уравнение движения материальной точки следующим образом:

Поднося к квадрату и добавляя отдельно левые и правые части этих выражений, получим:

или
x2 + y2 = 32.
Итак, уравнением траектории движения материальной точки будет уравнения
окружности радиусом R = 3 см с центром в начале координат.
Скорость движения точки
Для определения скорости движения материальной точки при координатном способе задания используем основные положения, которые были полученные при рассмотрении векторного способа задания движения материальной точки. С этой целью, подставив выражение в выражение, получим:

С другой стороны, вектор скорости (как и любой другой вектор) можно в принятой системе координат Oxyz представить через его проекции на оси координат. А именно:

где vx, vy, и vz — проекции вектора скорости на соответствующие оси координат.
Если рассмотреть и сравнить выражения, то можно увидеть, что есть возможность приравнять коэффициенты при единичных векторах  ,
,  ,
, и получить такие выражения для проекций вектора скорости на соответствующие оси координат:
и получить такие выражения для проекций вектора скорости на соответствующие оси координат:

Таким образом, проекции вектора скорости материальной точки на координатные оси равны первым производным по времени от соответствующих координат.
Если известны проекции вектора скорости на оси координат, то есть возможность составить их геометрически и получить модуль вектора скорости v материальной точки:

Направление вектора скорости  определяется через направляющие косинусы углов, которые этот вектор образует с соответствующими осями координат:
определяется через направляющие косинусы углов, которые этот вектор образует с соответствующими осями координат:

Зная направляющие косинусы, через арккосинус находят сами углы.
Ускорение движения точки
Для определения ускорения движения материальной точки при координатном способе задания движения ведем себя аналогично, как и в случае определения скорости движения. А именно: значение радиус-вектора  подставим в выражение, определим вторую производную и найдем ускорение
подставим в выражение, определим вторую производную и найдем ускорение

С другой стороны, вектор ускорения  можно в принятой системе координат Oxyz представить в виде его проекций на оси координат. А именно:
можно в принятой системе координат Oxyz представить в виде его проекций на оси координат. А именно:

Если сравнить уравнения, то можно написать такие соотношения:

Таким образом, проекции вектора ускорения материальной точки на оси координат равны вторым производным по времени от соответствующих координат.
Если известны проекции вектора ускорения на оси координат, то есть возможность составить их геометрически и получить модуль самого вектора:
a =  .
.
Направление вектора  также определяется через направляющие косинусы:
также определяется через направляющие косинусы:

Используя значение направляющих косинусов, через арккосинус находят сами углы.
Таким образом, при координатном способе задания движения материальной точки, если это движение осуществляется в пространстве, ее скорость и ускорение определяются соответственно с помощью выражений. Если движение осуществляется в плоскости, то во всех этих выражениях отбрасывается одна координата, а если прямолинейно, то отбрасываются две координаты.
Услуги по теоретической механике:
- Заказать теоретическую механику
- Помощь по теоретической механике
- Заказать контрольную работу по теоретической механике
Учебные лекции:
- Статика
- Система сходящихся сил
- Момент силы
- Пара сил
- Произвольная система сил
- Плоская произвольная система сил
- Трение
- Расчет ферм
- Расчет усилий в стержнях фермы
- Пространственная система сил
- Произвольная пространственная система сил
- Плоская система сходящихся сил
- Пространственная система сходящихся сил
- Равновесие тела под действием пространственной системы сил
- Естественный способ задания движения точки
- Центр параллельных сил
- Параллельные силы
- Система произвольно расположенных сил
- Сосредоточенные силы и распределенные нагрузки
- Кинематика твердого тела
- Движения твердого тела
- Динамика материальной точки
- Динамика механической системы
- Динамика плоского движения твердого тела
- Динамика относительного движения материальной точки
- Динамика твердого тела
- Кинематика простейших движений твердого тела
- Общее уравнение динамики
- Работа и мощность силы
- Обратная задача динамики
- Поступательное и вращательное движение твердого тела
- Плоскопараллельное (плоское) движение твёрдого тела
- Сферическое движение твёрдого тела
- Движение свободного твердого тела
- Сложное движение твердого тела
- Сложное движение точки
- Плоское движение тела
- Статика твердого тела
- Равновесие составной конструкции
- Равновесие с учетом сил трения
- Центр масс
- Колебания материальной точки
- Относительное движение материальной точки
- Статические инварианты
- Дифференциальные уравнения движения точки под действием центральной силы и их анализ
- Динамика системы материальных точек
- Общие теоремы динамики
- Теорема об изменении кинетической энергии
- Теорема о конечном перемещении плоской фигуры
- Потенциальное силовое поле
- Метод кинетостатики
- Вращения твердого тела вокруг неподвижной точки
Кинематика изучает простейшую форму движения – механическое движение. Кинематически определить движение тела – это значит указать его положение относительно выбранной системы отсчета в каждый момент времени.
Движение материальной точки (в дальнейшем будем говорить просто точки) задано, если известен закон движения.
Закон движения. Закон движения – это уравнение, позволяющее определить положение точки относительно выбранной системы отсчета в любой момент времени.
Основная задача кинематики точки. По известному закону движения определить траекторию движения точки, ее положение на траектории, скорость и ускорение точки в ее положении на траектории.
Способы задания движения точки
В зависимости от выбора системы отсчета существуют три способа задания движения точки – векторный, координатный и естественный. Рассмотрим эти способы задания движения в отдельности.
Векторный способ задания движения точки
Пусть точка  движется вдоль некоторой линии. В качестве начала отсчета выберем произвольный центр
движется вдоль некоторой линии. В качестве начала отсчета выберем произвольный центр  . Положение точки на линии определяется радиус-вектором
. Положение точки на линии определяется радиус-вектором ") (рис.К.9).
(рис.К.9).

Таким образом, вектор ") определяет положение движущейся точки в любой момент времени. Следовательно, уравнение является законом движения при векторном способе задания движения.
определяет положение движущейся точки в любой момент времени. Следовательно, уравнение является законом движения при векторном способе задания движения.
Величина  называется вектором скорости точки. Вектор скорости точки всегда направлен по касательной к годографу (траектории движения точки) в сторону перемещения точки.
называется вектором скорости точки. Вектор скорости точки всегда направлен по касательной к годографу (траектории движения точки) в сторону перемещения точки.
Величина  называется вектором ускорения точки.
называется вектором ускорения точки.
Определим направление вектора  . Направление вектора определяется направлением вектора
. Направление вектора определяется направлением вектора  . Пусть точка движется по некоторой траектории (рис.К.10) от точки
. Пусть точка движется по некоторой траектории (рис.К.10) от точки  к точке
к точке  . Пусть скорость в точке равна
. Пусть скорость в точке равна  , а скорость в точке равна
, а скорость в точке равна  . Перенесем вектор параллельно самому себе из точки в точку .
. Перенесем вектор параллельно самому себе из точки в точку .
Тогда вектор  .
.

Как показано на рис.К.10, вектор направлен в сторону вогнутости траектории движения точки, следовательно и вектор ускорения всегда направлен в ту же сторону, то есть в сторону вогнутости траектории движения точки.
Координатный способ задания движения точки
Пусть точка движется вдоль некоторой линии. В качестве системы отсчета выберем декартовую систему координат с началом в произвольном центре . Тогда положение точки на линии определяются текущими координатами в любой момент времени \
y = y(t)
end{array} right.")

Следовательно, система уравнений определяют закон движения точки при координатном способе задания движения. Исключая из закона движения время  , получим уравнение вида
, получим уравнение вида ") , являющееся уравнением траектории движения точки.
, являющееся уравнением траектории движения точки.
Пример. Закон движения записывается уравнениями  . Найти уравнение траектории движения точки.
. Найти уравнение траектории движения точки.
Решение. Из первого уравнения следует, что ") или
или  = frac{x}{5}") . Тогда из второго уравнения
. Тогда из второго уравнения  + 1 = frac{6}{5}x + 1") . Или
. Или  . Таким образом получено, что траекторией движения точки является прямая линия .
. Таким образом получено, что траекторией движения точки является прямая линия .
Компоненты скорости и ускорения движущейся точки в любой момент времени определяются по формулам
}}{{dt}} = dot x(t)")
")
}}{{dt}} = dot y(t)")
") (К.9)
(К.9)
.
Модули скорости и ускорения 
 (К.10)
(К.10)
Векторы скорости и ускорения

 .
.
Содержание:
Предмет кинематики:
Кинематикой называют раздел теоретической механики, в котором изучают механическое движение, рассматриваемое без учета сил, приложенных к движущимся объектам
Арифметика наряду с некоторыми другими науками, занимающимися исчислением, является наиболее отвлеченной из математических наук. Для нее достаточно одного понятия «число», и она не нуждается ни в каких других фундаментальных понятиях.
Геометрия не может ограничиться одним понятием числа. Она основывается также и на понятиях, связанных с геометрической формой (длина, поверхность, объем, угол). Геометрия часто пользуется понятием движения; линию геометрия определяет как след точки. Но если точка оставила след, то, следовательно, она передвигалась; фигура, образовавшая тело вращения, поворачивалась вокруг оси, т. е. тоже находилась в движении. Однако геометрию не интересует, совершалось ли это движение в течение многих тысячелетий или же в малые доли секунды. Понятие времени чуждо геометрии. Размерностью геометрических величин является размерность длины L в той или иной степени (площадь измеряется в L2, объем—в L3, размерность угла
К понятиям числа и геометрической формы добавляется новое понятие — «время» в науке, изучающей геометрические свойства движения и называемой кинематикой.
«В мире нет ничего, кроме движущейся материи, и движущаяся материя не может двигаться иначе, как в пространстве и во времени». Механическое движение, как и все прочие виды движения (теплота, электричество, ядерные процессы, органическая жизнь и пр.), не может происходить вне времени. Напомним, что под механическим движением мы понимаем один из видов движения материи, выражающийся в изменении с течением времени взаимных положений тел или частей тела. Положение тел, а также их механическое движение может быть отмечено лишь относительно других реальных или условных тел. Так, например, положение корабля может быть отмечено относительно берегов или относительно сетки географических долгот и широт; чтобы дать положение летящего самолета, можно указать направление, в котором этот самолет находится, и расстояние до него или же дать его координаты х, у и z относительно системы осей, определенным образом ориентированных в пространстве; чтобы дать положение поезда, можно назвать железную дорогу, по которой он движется, и его расстояние от станции. Реальное или условное твердое тело, по отношению к которому определяется положение других движущихся тел, называют системой отсчета.
Кинематика изучает изменения в положении тел по отношению к системе отсчета. Она дает возможность разобраться в многообразии видов механического движения и установить пространственные и временные меры движения (путь, скорость и т. п.), но не дает возможности предсказать, как будет двигаться тело под действием приложенных сил, или определить, какие силы должны быть приложены к телу для того, чтобы оно совершало то или иное движение. Понятие «силы» чуждо кинематике.
Формулы размерности кинематических величин содержат размерности длины L и времени Т, размерность же силы F или массы M в размерность кинематических величин не входит.
Кинематика является разделом теоретической механики, в котором изучают механическое движение, рассматриваемое без учета сил, приложенных к движущимся объектам. Изучение же механического движения в связи с силами, приложенными к движущимся объектам, составляет предмет динамики.
Кинематика наряду со статикой является необходимой предпосылкой динамики и, следовательно, всех других механических дисциплин. Но кинематика имеет также и непосредственное применение в технике. Техника широко пользуется законами и формулами кинематики. Большое значение кинематика имеет в теории механизмов и машин (TMM) .
История развития кинематики
Кинематика как самостоятельный раздел теоретический механики возникла в XIX столетии
Многие сведения из кинематики были известны еще в глубокой древности. Так, например, в сочинении «Механические проблемы», принадлежащем Аристотелю или кому-либо из его учеников, дан закон сложения двух прямолинейных равномерных движений. В древней астрономии пользовались равномерным круговым движением точки и знали, что проекция этой точки на прямую, лежащую в той же плоскости, совершает гармоническое колебание. Но появление отрывочных сведений еще не является возникновением науки. И хотя основателем кинематики иногда называют Галилея, кинематика как самостоятельный раздел теоретической механики возникла лишь в XIXв.
Упомянем о некоторых из открытий Галилея в области кинематики.
Галилей показал, что пути, проходимые движущимся телом, не всегда пропорциональны времени, и в своих исследованиях он пользовался понятием скорости. Но во времена Галилея считали возможным делить друг на друга только отвлеченные или одноименные числа, и потому Галилей не дал формулы скорости точки как отношения пройденного пути ко времени: 
Тем более он не мог дать формулы скорости в данное мгновение, которая стала возможной лишь после открытия дифференциального исчисления. Обе эти формулы были введены в науку Эйлером в сочинении «Механика, т. е. наука о движении, изложенная аналитическим методом», изданном в Петербурге в 1736 г.
Совершенно новым понятием, к которому пришел Галилей, возможно, под влиянием работ Бенедетти, было понятие ускоренного прямолинейного движения, хотя Галилей не вводит термина «ускорение» и не приводит формулы ускорения как отношения изменения величины скорости ко времени.
Галилей дал законы равноускоренного движения и свободного падения тел, установив, что пути, проходимые падающим телом за последовательные равные промежутки времени, относятся как ряд нечетных чисел. Так, было установлено, что пути, проходимые свободно падающим телом, пропорциональны квадрату времени, и в современном обозначении
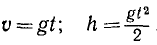
Законы падения тел Галилей вывел экспериментально, наблюдая качение шаров по наклонным плоскостям. Еще Леонардо да Винчи, великому предшественнику Галилея в области механики, была известна зависимость между длинами (и высотами) наклонных плоскостей и временем, в течение которого с этих плоскостей спускаются шары. Но эти работы Леонардо да Винчи не могли оказать влияния на развитие науки, они стали частично известны лишь после того, как в 1797 г. их опубликовал Вентури. Ко времени их опубликования эти работы имели только историческое значение.
Галилей показал, что движение тела, брошенного горизонтально или под углом к горизонту, состоит из двух независимых друг от друга движений: горизонтального равномерного и вертикального равнопеременного. Этим он не только ввел в употребление законы параллелограмма перемещений (см. §27), но в принципе обосновал введенный значительно позднее (в 1742 г.) Маклореном координатный способ определения движения (см. § 21), при котором движение точки рассматривают по движениям ее проекций на неподвижные оси.
Кинематика солнечной системы была создана в развитие теории Коперника астрономом Иоганном Кеплером и выражена в трех законах (1609 и 1619 гг.). Хотя законы Кеплера относятся только к движению планет, они имели громадное влияние на развитие всей теоретической механики.
Гюйгенс установил, что при движении точки по окружности центробежная сила пропорциональна квадрату скорости и обратно пропорциональна радиусу круга, откуда позднее было установлено,что при всяком криволинейном движении нормальное ускорение пропорционально квадрату скорости и обратно пропорционально радиусу кривизны.
Эйлер, по-видимому, первый (1772 г.), а за ним уже Ампер (1834 г.) предложили выделить кинематику в самостоятельный раздел механики — учение о.механическом движении без учета сил, приложенных к движущимся объектам.
Гаспар Кориолис исследовал составное движение и доказал (1831 г.) знаменитую теорему, позднее получившую название теоремы Кориолиса. Эта теорема является основной в механике относительного движения и имеет огромное значение для различных отраслей науки. Несколько позднее на основе этой теоремы в кинематике составного движения точки стали применять ускорение Кориолиса.
Понятие полного ускорения как величины, характеризующей изменение скорости в данное мгновение, установлено сравнительно недавно. Эта честь принадлежит Понселе, впервые начавшему применять понятие и термин «ускорение» в своих лекциях (1841 г.), и Резалю, впервые применившему его в учебнике (1851 и 1862 гг.).
Луи Пуансо в работе «Новая теория вращения тел» (1834 г.) обогатил кинематику рядом блестящих исследований и дал наглядные геометрические интерпретации. В частности, он изучил сложение вращений и вращение тела около неподвижной точки. Эта геометрическая теория позднее была развита Понселе, Шалем, Мебиусом и др.
По-видимому, первую монографию по кинематике под названием «Трактат по чистой кинематике (движение, рассматриваемое независимо от его причин)» издал Резаль (1862 г.). По прикладной кинематике заслуживает упоминания книга проф. П. О. Сомова «Кинематика подобно-изменяемой системы двух измерений» (1885 г.).
В настоящее время кинематика является хорошо исследованной областью науки, и дальнейшее развитие кинематики происходит преимущественно в виде применения ее к различным частным задачам техники.
Кинематика точки
В кинематике изучается движение материальных объектов (точки, твердого тела, сплошной среды) без рассмотрения причин, вызывающих или изменяющих это движение. Такое изучение движения материальных объектов не требует учета материальных характеристик этих объектов — массы, моментов инерции и др.
В кинематике рассматривают такие характеристики движения, как скорость и ускорение точки, угловые скорость и ускорение твердого тела и др.
Движение материальных объектов, в частности материальной точки, совершается в пространстве при изменении времени. Пространство в классической механике считается эвклидовым, не зависящим от времени и движущихся в нем материальных объектов. Время принимается универсальным, не связанным с пространством и не зависящим как от движения наблюдателя, с точки зрения которого рассматривается движение материального объекта, так и от движения самого материального объекта.
Движение материального объекта всегда следует рассматривать относительно какого-либо твердого тела — тела отсчета, т.е. движение является относительным. С телом отсчета скрепляют систему осей координат, например декартовых, принимая ее за систему отсчета, относительно которой рассматривается движение материального объекта. Системой отсчета для трехмерного эвклидова пространства не может служить одна точка, линия или плоскость, а должны быть три оси, не обязательно прямолинейные, но не лежащие в одной плоскости.
Независимость времени от движения означает, что во всех системах отсчета, произвольно движущихся друг относительно друга, оно одно и то же, если за начало отсчета выбрано общее для них событие.
В кинематике сплошной среды телами отсчета, относительно которых рассматривается движение, могут быть также деформируемые тела.
В курсе теоретической механики обычно изучаются движение точки и твердого тела. Соответственно кинематика делится на кинематику точки и кинематику твердого тела. В настоящем курсе дополнительно излагаются также основы кинематики сплошной среды.
В кинематике точки рассматриваются характеристики движения точки, такие, как скорость, ускорение, и методы их определения при различных способах задания движения. Важным в кинематике точки является понятие траектории. Траекторией точки называется геометрическое место ее последовательных положений в пространстве с течением времени относительно рассматриваемой системы отсчета.
По виду траекторий движения точки делятся на прямолинейные и криволинейные. Форма траектории зависит от выбранной системы отсчета. Одно и то же движение точки может быть прямолинейным относительно одной системы отсчета и криволинейным относительно другой. Например, если с летящего горизонтально Земле с постоянной скоростью самолета отцеплен груз, то, пренебрегая сопротивлением воздуха и учитывая только действие силы тяжести, получим в качестве траектории движения центра масс груза относительно самолета прямую линию, а относительно Земли — параболу.
Скорость точки
Одной из основных характеристик движения точки является ее скорость относительно выбранной системы отсчета, которая изображена в виде декартовой прямоугольной системы координат (рис. 1).
Рис. 1
Положение движущейся точки  относительно рассматриваемой системы отсчета определяется в момент времени
относительно рассматриваемой системы отсчета определяется в момент времени  радиусом-вектором
радиусом-вектором  , который соединяет неподвижную точку
, который соединяет неподвижную точку  с этой точкой. В другой момент времени
с этой точкой. В другой момент времени  движущаяся точка займет положение
движущаяся точка займет положение  и ее радиусом-вектором будет
и ее радиусом-вектором будет  . За время
. За время  радиус-вектор движущейся точки изменится на
радиус-вектор движущейся точки изменится на  .
.
Средней скоростью  точки за время
точки за время  называют отношение
называют отношение  , т. е.
, т. е.
Средняя скорость параллельна вектору  . В общем случае она зависит от времени осреднения
. В общем случае она зависит от времени осреднения  . У нее нет конкретной точки приложения на траектории.
. У нее нет конкретной точки приложения на траектории.
Введем скорость точки  в момент
в момент  , которая определяется как предел средней скорости, если промежуток времени, за который определяется средняя скорость, стремится к нулю, т. е.
, которая определяется как предел средней скорости, если промежуток времени, за который определяется средняя скорость, стремится к нулю, т. е.

Скорость точки направлена в сторону ее движения по предельному направлению вектора  при
при  , стремящемся к нулю, т. е. по предельному направлению секущей
, стремящемся к нулю, т. е. по предельному направлению секущей  , которая совпадает с касательной к траектории в точке
, которая совпадает с касательной к траектории в точке  . Таким образом, скорость точки равна первой производной по времени от ее радиуса-вектора. Она направлена по касательной к траектории в сторону движения точки.
. Таким образом, скорость точки равна первой производной по времени от ее радиуса-вектора. Она направлена по касательной к траектории в сторону движения точки.
Начало радиуса-вектора движущейся точки можно выбрать в любой неподвижной точке. На рис. 1 представлен случай, в котором радиусом-вектором является также р с началом в точке  . Радиусы-векторы
. Радиусы-векторы  и
и  имеют одинаковые изменения и
имеют одинаковые изменения и  за время и поэтому
за время и поэтому

Размерность скорости в  получаем из (1):
получаем из (1):
 .
.
Часто скорость выражают в км/ч;  .
.
Для характеристики переменного вектора используют понятие его годографа. Годографом вектора называют геометрическое место его концов, если переменный вектор в различные моменты времени откладывать от одной и той же общей точки.
Траектория точки, очевидно, является годографом радиуса-вектора или (рис. 1). Последовательные положения вектора в различные моменты времени откладываются в этом случае от точки  , а вектора — от точки .
, а вектора — от точки .
Первая производная по времени от радиуса-вектора есть скорость точки, направленная по касательной к траектории. Следовательно, параллельно касательной к годографу направлена первая производная по скалярному аргументу от любого переменного вектора.
Годографом вектора скорости является линия, на которой располагаются концы этого вектора в различные моменты времени, если их начала совместить в одной общей точке. Для построения годографа вектора скорости выбираем точку, например  (рис. 2,6), и начала векторов скорости для различных моментов времени переносим в эту точку, не изменяя их величин и направлений. Каждой точке траектории
(рис. 2,6), и начала векторов скорости для различных моментов времени переносим в эту точку, не изменяя их величин и направлений. Каждой точке траектории  (рис. 2, а) будет соответствовать своя изображающая точка
(рис. 2, а) будет соответствовать своя изображающая точка  на годографе вектора скорости (рис. 2,6). Масштаб для скоростей при построении годографа вектора скорости может быть выбран отличным от масштаба для скоростей, изображаемых в точках траектории. При движении точки по траектории соответствующая ей изображающая точка движется по годографу вектора скорости.
на годографе вектора скорости (рис. 2,6). Масштаб для скоростей при построении годографа вектора скорости может быть выбран отличным от масштаба для скоростей, изображаемых в точках траектории. При движении точки по траектории соответствующая ей изображающая точка движется по годографу вектора скорости.
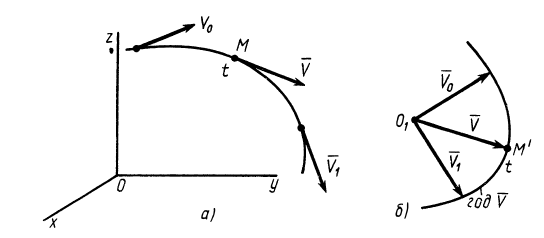
Рис. 2
При равномерном движении точки по прямой годографом вектора скорости является одна точка; при неравномерном движении — отрезок прямой, параллельный траектории.
Ускорение точки
Пусть движущаяся точка  в момент времени
в момент времени  имеет скорость
имеет скорость  . В момент времени
. В момент времени  эта точка занимает положение
эта точка занимает положение  , имея скорость
, имея скорость  (рис. 3,а). Чтобы изобразить приращение скорости
(рис. 3,а). Чтобы изобразить приращение скорости  за время
за время  , перенесем вектор скорости
, перенесем вектор скорости  параллельно самому себе в точку .
параллельно самому себе в точку .
Средним ускорением точки  за время называют отношение
за время называют отношение  , т. е.
, т. е.  . Среднее ускорение точки параллельно приращению скорости
. Среднее ускорение точки параллельно приращению скорости  . Как и средняя скорость, среднее ускорение не имеет на траектории конкретной течки приложения и изображено в точке условно. В общем случае среднее ускорение зависит от времени .
. Как и средняя скорость, среднее ускорение не имеет на траектории конкретной течки приложения и изображено в точке условно. В общем случае среднее ускорение зависит от времени .
Ускорением точки  в момент времени называют предел, к которому стремится среднее ускорение при , стремящемся к нулю, т. е.
в момент времени называют предел, к которому стремится среднее ускорение при , стремящемся к нулю, т. е.

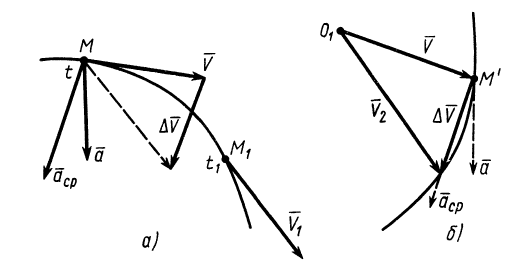
Рис. 3
Таким образом, ускорение точки равно первой производной по времени от скорости точки.
Приращение скорости  и, следовательно, среднее ускорение направлены внутрь вогнутости траектории. Так же направлены и их предельные значения при
и, следовательно, среднее ускорение направлены внутрь вогнутости траектории. Так же направлены и их предельные значения при  , стремящемся к нулю. Поэтому ускорение точки направлено тоже внутрь вогнутости траектории. Кроме того, ускорение как первая производная по времени от скорости, по свойству годографа вектора, параллельна касательной к годографу вектора скорости (рис. 3,6).
, стремящемся к нулю. Поэтому ускорение точки направлено тоже внутрь вогнутости траектории. Кроме того, ускорение как первая производная по времени от скорости, по свойству годографа вектора, параллельна касательной к годографу вектора скорости (рис. 3,6).
Размерность ускорения в  получаем из (2):
получаем из (2):

Векторный способ изучения движения
Движение точки относительно рассматриваемой системы отсчета при векторном способе изучения движения задается радиусом-вектором  этой точки (рис. 4). Движение точки считается заданным, если известен радиус-вектор движущейся точки как функция времени, т. е.
этой точки (рис. 4). Движение точки считается заданным, если известен радиус-вектор движущейся точки как функция времени, т. е.

Задание векторного уравнения движения (3) полностью определяет движение точки.
Траекторией точки является годограф радиуса-вектора. Скорость точки направлена по касательной к траектории и вычисляется, согласно ее определению, по формуле

Для ускорения точки соответственно имеем

Таким образом, если движение точки задано векторным способом, то скорость и ускорение вычисляются по формулам (4) и (5).
Определение скорости и ускорения точки сводится к чисто математической задаче вычисления первой и второй производных по времени от радиуса-вектора этой точки. Для практического вычисления скорости и ускорения обычно используют координатный и естественный способы изучения движения. Векторный способ ввиду его краткости и компактности удобен для теоретического изложения кинематики точки.
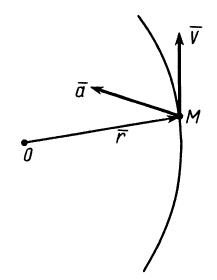
Рис. 4
Координатный способ изучения движения
Задание движения и траектория:
Движение точки можно изучать используя любую систему координат. Рассмотрим случай декартовых прямоугольных осей координат, которые являются также системой отсчета, относительно которой рассматривается движение точки. Движение точки в декартовых координатах считается заданным, если известны координаты точки как непрерывные, дважды дифференцируемые функции времени (рис. 5), т. е. заданы уравнения движения точки в декартовых координатах:

Уравнения движения точки в декартовых координатах полностью определяют движение точки. Они позволяют найти положение точки, ее скорость и ускорение в любой момент времени. Уравнения движения (6) есть также уравнения траектории точки в параметрической форме. Параметром является время  . Уравнения траектории в координатной форме из (6) получают исключением параметра
. Уравнения траектории в координатной форме из (6) получают исключением параметра  . Исключая время, например, из первых двух уравнений и затем из второго и третьего, получим уравнения двух поверхностей:
. Исключая время, например, из первых двух уравнений и затем из второго и третьего, получим уравнения двух поверхностей:

Это и есть уравнения траектории в координатной форме. Траекторией является линия пересечения двух поверхностей. Эти поверхности являются цилиндрическими, так как их уравнения не содержат одной из координат: первое — координаты  , второе — координаты
, второе — координаты  . Ось первой цилиндрической поверхности параллельна оси
. Ось первой цилиндрической поверхности параллельна оси  , второй — оси
, второй — оси  .
.
Исключая время из уравнений движения в другом порядке, получим траекторию точки как линию пересечения двух других цилиндрических поверхностей, например

При исключении параметра из уравнений движения могут быть получены отрезки линий или точки, которые не содержатся в уравнениях (6). Эти дополнительные точки не следует считать точками траектории.
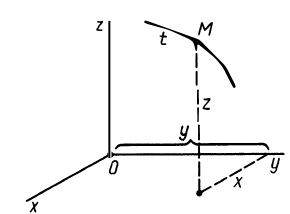
Рис. 5
Пример 1.
Даны уравнения движения точки по плоскости

где  ,
,  ,
,  — положительные постоянные величины. Определить уравнение траектории в координатной форме.
— положительные постоянные величины. Определить уравнение траектории в координатной форме.
Решение. Уравнения движения (а) есть уравнения траектории точки в параметрической форме с параметром  . Исключим его из уравнений движения. Для этого достаточно сложить правые и левые части уравнений, разделив предварительно первое уравнение на , а второе — на . Получим
. Исключим его из уравнений движения. Для этого достаточно сложить правые и левые части уравнений, разделив предварительно первое уравнение на , а второе — на . Получим

так как
Уравнение (б) есть уравнение прямой, отсекающей на осях координат отрезки и (рис. 6).
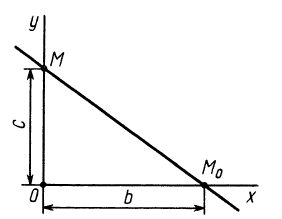
Рис. 6
Из уравнений (а) следует, что координаты точки  и
и  все время положительны и удовлетворяют условиям
все время положительны и удовлетворяют условиям  ,
,  , т. е. они могут изменяться только в пределах
, т. е. они могут изменяться только в пределах  ,
,  . Точки прямой, для которых
. Точки прямой, для которых  и
и  , не содержатся в уравнениях движения (а). Они дополнительно появились при исключении из уравнений параметра . Их не следует включать в траекторию.
, не содержатся в уравнениях движения (а). Они дополнительно появились при исключении из уравнений параметра . Их не следует включать в траекторию.
Траектория точки  в координатной форме выражается уравнением и двумя неравенствами:
в координатной форме выражается уравнением и двумя неравенствами:

Скорость в декартовых координатах
Разложим радиус-вектор и скорость точки на составляющие, параллельные осям координат (рис. 7). Получим

где  — координаты точки
— координаты точки  —единичные векторы осей координат;
—единичные векторы осей координат;  — проекции скорости на оси координат.
— проекции скорости на оси координат.
Учитывая (7), согласно определению скорости, имеем

так как  не изменяются при движении точки
не изменяются при движении точки  . Точки над означают их производные по времени. Сравнивая (7) и (8), получаем для проекций скорости на декартовы оси координат следующие формулы:
. Точки над означают их производные по времени. Сравнивая (7) и (8), получаем для проекций скорости на декартовы оси координат следующие формулы:

Проекция скорости точки на какую-либо координатную ось равна первой производной по времени от соответствующей координаты этой точки. По проекциям определяют числовое значение (модуль) скорости и косинусы углов вектора скорости с осями координат:

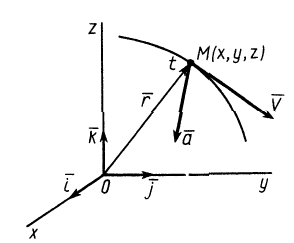
Рис. 7
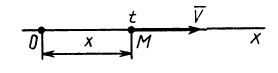
Рис. 8
Если точка движется в плоскости, то, выбрав оси координат  и
и  в этой плоскости, получим:
в этой плоскости, получим:

Соответственно
Для прямолинейного движения точки координатную ось, например Для прямолинейного движения точки координатную ось, например Ох, направляют по траектории (рис. 8). Тогда  и
и  ,
,  ,
,  . Проекция скорости и ее модуль определяются по формулам
. Проекция скорости и ее модуль определяются по формулам
Уравнение годографа вектора скорости
Известны уравнения движения точки в декартовых координатах. Получим уравнения годографа вектора скорости. На рис. 9, а изображены траектория точки и несколько векторов скорости в выбранном масштабе для различных моментов времени, а на рис. 9,6 представлен годограф вектора скорости этого движения. Точке  на траектории соответствует точка
на траектории соответствует точка  на годографе вектора скорости.
на годографе вектора скорости.
Координаты точки  , согласно определению годографа, выражаются через проекции вектора скорости на оси координат
, согласно определению годографа, выражаются через проекции вектора скорости на оси координат  по формулам
по формулам

Если оси координат для годографа вектора скорости параллельны соответствующим осям координат, относительно которых заданы уравнения движения точки, то

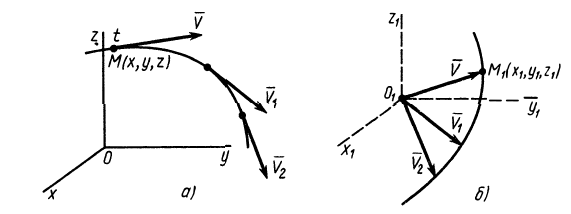
Рис. 9
Параметрические уравнения годографа вектора скорости принимают такую форму:

Исключая из этих уравнений параметр  , получим уравнения годографа вектора скорости в координатной форме.
, получим уравнения годографа вектора скорости в координатной форме.
Годограф вектора скорости дает наглядное представление о скоростях движущейся точки в разные моменты времени. Он также позволяет определить направление вектора ускорения, так как ускорение параллельно касательной к годографу вектора скорости.
Ускорение точки в декартовых координатах
Разложим ускорение точки на составляющие, параллельные осям декартовой системы координат. Получим

где  — проекции ускорения на координатные оси. Согласно определению ускорения и формулам (7) и (8), имеем
— проекции ускорения на координатные оси. Согласно определению ускорения и формулам (7) и (8), имеем

Сравнивая (11) и (12), получаем формулы для проекций ускорения на оси декартовой системы координат:

Проекция ускорения на какую-либо координатную ось равна второй производной по времени от соответствующей координаты движущейся точки.
Числовое значение ускорения и косинусы углов вектора ускорения с осями координат определяем по формулам
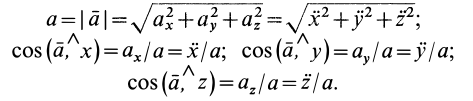
При движении точки по плоскости оси и выбирают в этой же плоскости. Тогда  ,
,  . Формулы для ускорения и его проекций на оси координат примут вид
. Формулы для ускорения и его проекций на оси координат примут вид

Соответственно

Для прямолинейного движения ось  направим по траектории точки. Тогда
направим по траектории точки. Тогда  ,
,  и
и  ,
,  . Формулы для ускорения и его проекции на ось принимают вид
. Формулы для ускорения и его проекции на ось принимают вид
Соответственно для числового значения ускорения имеем

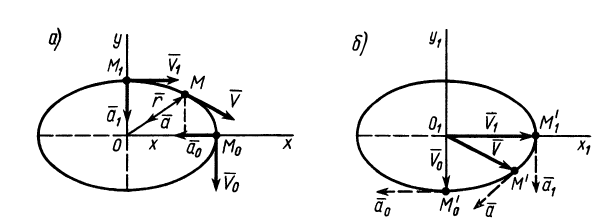
Рис. 10
Пример 2.
Движение точки по плоскости  задано уравнениями
задано уравнениями 
где  ,
,  и
и  —постоянные положительные величины. Определить уравнение траектории в координатной форме, значения скорости и ускорения точки в момент времени
—постоянные положительные величины. Определить уравнение траектории в координатной форме, значения скорости и ускорения точки в момент времени  , а также уравнение годографа вектора скорости.
, а также уравнение годографа вектора скорости.
Решение. Уравнение траектории в координатной форме находим исключением времени из уравнений движения. Для этого поделим первое уравнение на , второе — на , возводим в квадрат и складываем. Получаем уравнение эллипса (рис. 10, а) с полуосями и :

так как

При  точка имеет координаты
точка имеет координаты  , т. е. занимает положение
, т. е. занимает положение  . Определим проекции скорости и ускорения на оси координат. Имеем:
. Определим проекции скорости и ускорения на оси координат. Имеем:

Для момента времени  получаем:
получаем:
По проекциям устанавливаем направление скорости по касательной к траектории и направление ускорения по радиусу-вектору к точке  . Изображаем эти векторы в точке
. Изображаем эти векторы в точке  и дополнительно в точках
и дополнительно в точках  и
и  .
.
Если выбрать для годографа вектора скорости оси  и
и  параллельными осям
параллельными осям  и
и  , то для его текущих координат имеем
, то для его текущих координат имеем

Исключая из этих параметрических уравнений годографа вектора скорости время г, получим следующее его уравнение в координатной форме:

На рис. 10,6 отмечены три изображающие точки годографа  ,
,  и
и  , соответствующие точкам траектории
, соответствующие точкам траектории  ,
,  и
и  , а также указаны направления ускорения в этих точках.
, а также указаны направления ускорения в этих точках.
Естественный способ изучения движения
Естественный способ задания движения:
При естественном способе задания движения задаются траектория и закон движения точки по траектории. Движение точки рассматривается относительно фиксированной системы отсчета. Задание траектории относительно выбранной системы отсчета осуществляется различными способами: уравнениями (возможно, вместе с неравенствами), словесно или в виде графика (в каком-либо масштабе). Например, можно сказать, что траекторией автомобиля, принимаемого за точку, является дуга окружности радиусом 10 км и т. д.
Для задания закона движения точки по траектории необходимо выбрать на траектории точку  , принимаемую за начало отсчета расстояний (рис. 11). Расстояния в одну сторону от точки
, принимаемую за начало отсчета расстояний (рис. 11). Расстояния в одну сторону от точки  по траектории считаются положительными (например, вправо), в другую — отрицательными. Кроме того, следует задать начало отсчета времени. Обычно за
по траектории считаются положительными (например, вправо), в другую — отрицательными. Кроме того, следует задать начало отсчета времени. Обычно за  принимают момент времени, в который движущаяся точка проходит через точку
принимают момент времени, в который движущаяся точка проходит через точку  , или момент начала движения. Время до этого события считается отрицательным, а после него — положительным.
, или момент начала движения. Время до этого события считается отрицательным, а после него — положительным.
Если в момент времени  движущаяся точка занимает положение М, то закон движения точки по траектории задается зависимостью от времени расстояния
движущаяся точка занимает положение М, то закон движения точки по траектории задается зависимостью от времени расстояния  , отсчитываемого от точки
, отсчитываемого от точки  до точки
до точки  , т. е.
, т. е.  . Эта функция должна быть непрерывной и дважды дифференцируемой. Расстояние
. Эта функция должна быть непрерывной и дважды дифференцируемой. Расстояние  берется по траектории, какой бы сложной ни была форма траектории. Это расстояние не имеет прямого отношения к пройденному точкой пути за время , так как за начало отсчета расстояний может быть выбрана, в частности, и конечная точка пути. К тому же движение точки может быть колебательным вокруг начальной точки
берется по траектории, какой бы сложной ни была форма траектории. Это расстояние не имеет прямого отношения к пройденному точкой пути за время , так как за начало отсчета расстояний может быть выбрана, в частности, и конечная точка пути. К тому же движение точки может быть колебательным вокруг начальной точки  .
.
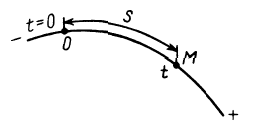
Рис. 11
От задания движения в декартовых координатах можно перейти к его заданию естественным способом. Закон движения точки по траектории в дифференциальной форме через декартовы координаты выражается в виде

и после интегрирования —в конечной форме
если

За начало отсчета расстояний принята точка траектории, в которой находится движущаяся точка в начальный момент времени. Знак у квадратного корня определяется выбором направления положительных и отрицательных расстояний.
Скорость точки при естественном способе задания движения
Пусть движение точки задано естественным способом, т. е. заданы траектория точки и закон ее движения по траектории  . Вычислим скорость точки. Для этого используем радиус-вектор
. Вычислим скорость точки. Для этого используем радиус-вектор  движущейся точки, начало которого находится в неподвижной точке
движущейся точки, начало которого находится в неподвижной точке  (рис. 12). При движении точки ее радиус-вектор изменяется с течением времени, а следовательно, он изменяется в зависимости от расстояния. Используя определение скорости, имеем
(рис. 12). При движении точки ее радиус-вектор изменяется с течением времени, а следовательно, он изменяется в зависимости от расстояния. Используя определение скорости, имеем
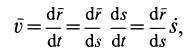
или  , где
, где  . Вектор
. Вектор  направлен по касательной к траектории как производная от вектора по скалярному аргументу и является единичным вектором. Модуль этого вектора равен единице, как предел отношения длины хорды
направлен по касательной к траектории как производная от вектора по скалярному аргументу и является единичным вектором. Модуль этого вектора равен единице, как предел отношения длины хорды  к длине стягивающей ее дуги
к длине стягивающей ее дуги  при стремлении ее к нулю.
при стремлении ее к нулю.
Единичный вектор  всегда направлен по касательной к траектории в сторону возрастающих (положительных) расстояний независимо от направления движения точки. При
всегда направлен по касательной к траектории в сторону возрастающих (положительных) расстояний независимо от направления движения точки. При  направления векторов
направления векторов  и
и  совпадают. Вектор в этом случае направлен в сторону возрастающих расстояний. Если точка движется в сторону убывающих расстояний, то
совпадают. Вектор в этом случае направлен в сторону возрастающих расстояний. Если точка движется в сторону убывающих расстояний, то  и направления векторов и противоположны. Но вектор направлен в сторону убывающих расстояний, а следовательно, вектор опять направлен в сторону возрастающих расстояний.
и направления векторов и противоположны. Но вектор направлен в сторону убывающих расстояний, а следовательно, вектор опять направлен в сторону возрастающих расстояний.
При  вектор скорости направлен по , т. е. в сторону возрастающих расстояний; при
вектор скорости направлен по , т. е. в сторону возрастающих расстояний; при  он имеет направление, противоположное , т. е. в сторону убывающих расстояний.
он имеет направление, противоположное , т. е. в сторону убывающих расстояний.
Величина  называется алгебраической скоростью точки. Ее можно считать проекцией скорости на положительное направление касательной к траектории, совпадающее с направлением единичного вектора .
называется алгебраической скоростью точки. Ее можно считать проекцией скорости на положительное направление касательной к траектории, совпадающее с направлением единичного вектора .
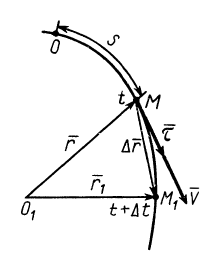
Рис. 12
Естественное задание движения точки полностью определяет скорость точки по величине и направлению. Алгебраическую скорость находят дифференцированием по времени закона изменения расстояний. Единичный вектор определяют по заданной траектории.
Геометрические понятия. Дифференцирование единичного вектора
Радиус кривизны и соприкасающаяся плоскость. В точке  кривой линии проведем касательную
кривой линии проведем касательную  (рис. 13). В другой близкой точке кривой
(рис. 13). В другой близкой точке кривой  , отстоящей от точки
, отстоящей от точки  на расстоянии
на расстоянии  , построим касательную
, построим касательную  . В общем случае пространственной кривой касательные
. В общем случае пространственной кривой касательные  и
и  будут скрещиваться. Проведем в точке
будут скрещиваться. Проведем в точке  прямую линию
прямую линию  параллельную
параллельную  . Угол
. Угол  между линиями
между линиями  и
и  называется углом смежности. Кривизной кривой
называется углом смежности. Кривизной кривой  в точке
в точке  называют предел, к которому стремится угол смежности, приходящийся на единицу расстояния
называют предел, к которому стремится угол смежности, приходящийся на единицу расстояния  , причем
, причем  стремится к нулю, т. е.
стремится к нулю, т. е.

Радиусом кривизны кривой  в точке называют величину, обратную кривизне кривой в этой точке, т. е.
в точке называют величину, обратную кривизне кривой в этой точке, т. е.
Вычислим радиус кривизны дуги окружности радиусом  (рис. 14). Дуга окружности длиной
(рис. 14). Дуга окружности длиной  , опирающаяся на центральный угол
, опирающаяся на центральный угол  , выражается зависимостью
, выражается зависимостью  . Для радиуса кривизны имеем
. Для радиуса кривизны имеем
т. е. для окружности радиус кривизны в каждой ее точке один и тот же и совпадает с радиусом окружности.
Участок кривой из малой окрестности какой-либо ее точки лучше всего аппроксимирует по сравнению с дугами других окружностей элемент дуги окружности, радиус которой равен радиусу кривизны кривой в рассматриваемой точке.
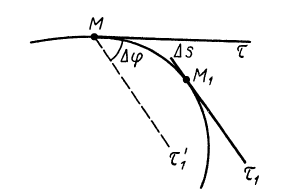
Рис. 13
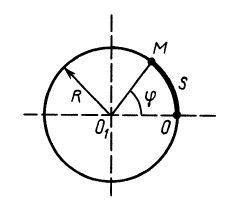
Рис. 14
Для определения понятия соприкасающейся плоскости проводим вспомогательную плоскость через две пересекающиеся прямые и (см. рис. 13). Предельное положение этой плоскости при совпадении в пределе точки  с точкой
с точкой  называется соприкасающейся плоскостью кривой в точке
называется соприкасающейся плоскостью кривой в точке  .
.
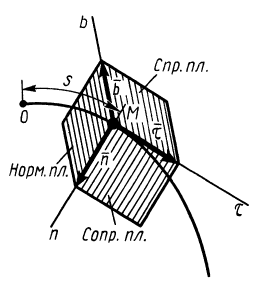
Рис. 15
В случае плоской кривой соприкасающейся плоскостью для всех точек кривой является сама плоскость, в которой расположена эта кривая.
Естественный трехгранник
Построим в точке кривой линии естественные оси этой кривой (рис. 15). Первой естественной осью является касательная . Ее положительное направление совпадает с направлением единичного вектора касательной  , направленного в сторону возрастающих расстояний.
, направленного в сторону возрастающих расстояний.
Перпендикулярно касательной располагается нормальная плоскость кривой. Нормаль, расположенная в соприкасающейся плоскости, называется главной нормалью  . Она является линией пересечения нормальной плоскости с соприкасающейся плоскостью. По главной нормали внутрь вогнутости кривой направим единичный вектор
. Она является линией пересечения нормальной плоскости с соприкасающейся плоскостью. По главной нормали внутрь вогнутости кривой направим единичный вектор  . Он определяет положительное направление второй естественной оси.
. Он определяет положительное направление второй естественной оси.
Нормаль, перпендикулярная главной нормали, называется бинормалью. Единичный вектор  , направленный по бинормали так, чтобы три вектора
, направленный по бинормали так, чтобы три вектора  , и
, и  образовывали правую систему осей координат, определит положительное направление третьей естественной оси.
образовывали правую систему осей координат, определит положительное направление третьей естественной оси.
Три взаимно перпендикулярные оси  ,
,  и
и  , положительные направления которых совпадают с направлениями единичных векторов
, положительные направления которых совпадают с направлениями единичных векторов  , ,
, ,  , называются естественными осями кривой. Эти оси образуют в точке
, называются естественными осями кривой. Эти оси образуют в точке  естественный трехгранник. При движении точки по кривой естественный трехгранник движется вместе с точкой как твердое тело, поворачиваясь вокруг вершины, совпадающей с движущейся точкой.
естественный трехгранник. При движении точки по кривой естественный трехгранник движется вместе с точкой как твердое тело, поворачиваясь вокруг вершины, совпадающей с движущейся точкой.
Дифференцирование единичного вектора
Вычислим производную от единичного вектора по скалярному аргументу. В кинематике точки скалярными аргументами обычно являются время и расстояние по траектории. В качестве единичного вектора выберем , направленный по касательной к траектории, и вычислим его производную по времени.
Производная  перпендикулярна самому единичному вектору . Для доказательства этого используем тождество
перпендикулярна самому единичному вектору . Для доказательства этого используем тождество

Дифференцируя по времени обе части этого тождества, получим
Каждый из сомножителей этого выражения не равен нулю, поэтому векторы и перпендикулярны друг другу. Это справедливо для любого другого вектора, числовая величина (модуль) которого постоянна. Направим по вектору единичный вектор  . Тогда
. Тогда

Годографом вектора является кривая, расположенная на сфере единичного радиуса, так как единичный вектор изменяется только по направлению (рис. 16).
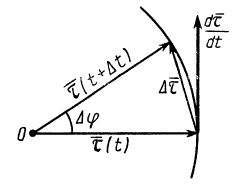
Рис. 16
По определению модуля производной от вектора имеем
Длина малой хорды с точностью до малых величин более высокого порядка равна длине дуги, которую стягивает хорда, т. е.
с точностью до малых величин более высокого порядка равна длине дуги, которую стягивает хорда, т. е.
где  — угол, опирающийся на эту дугу. Используя это выражение, получим
— угол, опирающийся на эту дугу. Используя это выражение, получим

Подставляя это значение в (14) и используя выражение для радиуса кривизны и переменную  , получим
, получим

Радиус кривизны  считаем положительным.
считаем положительным.
Вектор и совпадающий с ним по направлению единичный вектор  направлены параллельно предельному положению вектора
направлены параллельно предельному положению вектора  при
при  , стремящемся к нулю, т. е. они расположены в соприкасающейся плоскости кривой. Единичный вектор
, стремящемся к нулю, т. е. они расположены в соприкасающейся плоскости кривой. Единичный вектор  перпендикулярен вектору
перпендикулярен вектору  , направленному по касательной к кривой. Следовательно, вектор
, направленному по касательной к кривой. Следовательно, вектор  направлен по главной нормали кривой в сторону ее вогнутости, так как в эту сторону направлено предельное положение вектора .
направлен по главной нормали кривой в сторону ее вогнутости, так как в эту сторону направлено предельное положение вектора .
Если имеем любой другой вектор  с постоянным модулем, то для него остается справедливым все, что было получено для единичного вектора, только радиус годографа следует заменить его модулем . Получим
с постоянным модулем, то для него остается справедливым все, что было получено для единичного вектора, только радиус годографа следует заменить его модулем . Получим

где — теперь единичный вектор, перпендикулярный вектору и направленный параллельно .
Формулу (15′) можно выразить векторным произведением:

где  — вектор угловой скорости поворота вектора , модуль которого
— вектор угловой скорости поворота вектора , модуль которого  . Вектор угловой скорости
. Вектор угловой скорости  следует направить перпендикулярно плоскости, в которой расположены векторы и
следует направить перпендикулярно плоскости, в которой расположены векторы и  , причем так, чтобы с его стрелки увидеть поворот вектора к в этой плоскости на угол
, причем так, чтобы с его стрелки увидеть поворот вектора к в этой плоскости на угол  против часовой стрелки. Подробнее понятие вектора угловой скорости дается при рассмотрении вращения твердого тела вокруг неподвижной оси и в других случаях его движений.
против часовой стрелки. Подробнее понятие вектора угловой скорости дается при рассмотрении вращения твердого тела вокруг неподвижной оси и в других случаях его движений.
Ускорение точки при естественном способе задания движения
Учитывая, что для скорости точки имеем

в соответствии с определением ускорения и (15) получаем

так как  и направлен внутрь вогнутости траектории параллельно единичному вектору главной нормали .
и направлен внутрь вогнутости траектории параллельно единичному вектору главной нормали .
Получено разложение ускорения точки по осям естественного трехгранника. Часть ускорения

называется касательной составляющей ускорения. Другая часть ускорения

называется нормальной составляющей ускорения. Она направлена внутрь вогнутости траектории, т. е. в сторону положительного направления единичного вектора главной нормали , так как внутрь вогнутости траектории направлено полное ускорение. Таким образом, ускорение точки

Из (17) получим формулы для проекций ускорения на естественные оси. Имеем:

Проекция ускорения на положительное направление касательной, совпадающее с направлением единичного вектора , называется касательным ускорением, а на главную нормаль, направленную по единичному вектору ,— нормальным ускорением. Проекция ускорения на бинормаль, направленную по единичному вектору , равна нулю; следовательно, ускорение точки расположено в соприкасающейся плоскости траектории. В этой плоскости находятся единичные векторы касательной и главной нормали.
Учитывая ортогональность  и
и  (рис. 17), в соответствии с уравнением (18) имеем
(рис. 17), в соответствии с уравнением (18) имеем

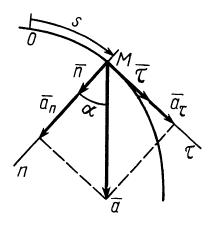
Рис. 17
Нормальная составляющая ускорения  всегда направлена внутрь вогнутости траектории. Касательная составляющая
всегда направлена внутрь вогнутости траектории. Касательная составляющая  при
при  направлена в положительную сторону касательной, т. е. по направлению единичного вектора , а при
направлена в положительную сторону касательной, т. е. по направлению единичного вектора , а при  — в отрицательную, противоположно .
— в отрицательную, противоположно .
При  и
и  векторы скорости и касательной составляющей ускорения направлены в одну сторону — по . Движение точки является ускоренным в положительном направлении касательной к траектории. При
векторы скорости и касательной составляющей ускорения направлены в одну сторону — по . Движение точки является ускоренным в положительном направлении касательной к траектории. При  и
и  опять векторы скорости и касательной составляющей ускорения имеют одинаковые направления и, следовательно, движение точки является ускоренным, но в отрицательном направлении касательной к траектории.
опять векторы скорости и касательной составляющей ускорения имеют одинаковые направления и, следовательно, движение точки является ускоренным, но в отрицательном направлении касательной к траектории.
Если и  , то вектор скорости направлен по , а вектор касательной составляющей ускорения противоположен ему по направлению. Движение точки является замедленным в положительном направлении касательной к траектории. При и имеем замедленное движение точки в отрицательную сторону касательной к траектории точки.
, то вектор скорости направлен по , а вектор касательной составляющей ускорения противоположен ему по направлению. Движение точки является замедленным в положительном направлении касательной к траектории. При и имеем замедленное движение точки в отрицательную сторону касательной к траектории точки.
Случаи обращения в нуль касательного ускорения получают из условия
Это условие выполняется все время, пока  , т.е. при равномерном движении точки по траектории любой формы. Касательное ускорение обращается в нуль также в те моменты времени, в которые алгебраическая скорость
, т.е. при равномерном движении точки по траектории любой формы. Касательное ускорение обращается в нуль также в те моменты времени, в которые алгебраическая скорость  достигает экстремума, например максимума или минимума. Для изображенного на рис. 18 изменения алгебраической скорости в зависимости от времени касательное ускорение равно нулю в моменты времени
достигает экстремума, например максимума или минимума. Для изображенного на рис. 18 изменения алгебраической скорости в зависимости от времени касательное ускорение равно нулю в моменты времени  и
и  . При колебаниях маятника (рис. 19) эти моменты соответствуют его прохождению через точку
. При колебаниях маятника (рис. 19) эти моменты соответствуют его прохождению через точку  . При движении маятника в одну сторону алгебраическая скорость в точке
. При движении маятника в одну сторону алгебраическая скорость в точке  достигает максимума, при движении в обратном направлении — минимума.
достигает максимума, при движении в обратном направлении — минимума.
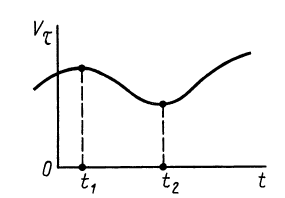
Рис. 18
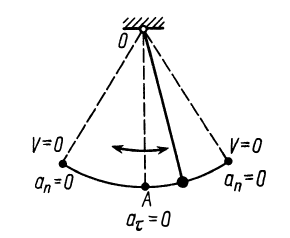
Рис. 19
Рис. 20
Случаи обращения в нуль нормального ускорения следуют из условия
Это условие выполняется при  , т. е. при прямолинейном движении точки. При движении точки по криволинейной траектории
, т. е. при прямолинейном движении точки. При движении точки по криволинейной траектории  в точках перегиба, в которых происходит изменение выпуклости траектории на вогнутость, и наоборот (рис. 20). Нормальное ускорение обращается также в нуль в моменты времени, в которые
в точках перегиба, в которых происходит изменение выпуклости траектории на вогнутость, и наоборот (рис. 20). Нормальное ускорение обращается также в нуль в моменты времени, в которые  , т. е. в моменты изменения направления движения точки по траектории. Для маятника такими моментами являются моменты отклонения маятника на наибольший угол как в одну сторону, так и в другую. Эти моменты соответствуют мгновенным остановкам маятника.
, т. е. в моменты изменения направления движения точки по траектории. Для маятника такими моментами являются моменты отклонения маятника на наибольший угол как в одну сторону, так и в другую. Эти моменты соответствуют мгновенным остановкам маятника.
Случаи обращения в нуль касательного и нормального ускорений, а также общие формулы для них показывают, что касательное ускорение характеризует изменение вектора скорости по величине, а нормальное— по направлению.
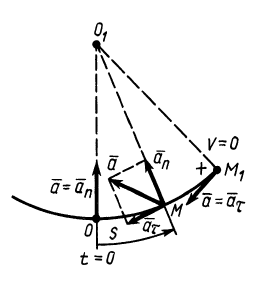
Рис. 21
Пример 3.
Точка  движется по дуге окружности радиусом
движется по дуге окружности радиусом  по закону
по закону  , где
, где  . Начало отсчета расстояний и времени, а также направление положительных расстояний указаны на рис. 21. Определить скорость и ускорение точки в момент времени
. Начало отсчета расстояний и времени, а также направление положительных расстояний указаны на рис. 21. Определить скорость и ускорение точки в момент времени  , а также их значения в точке
, а также их значения в точке  и в точке траектории
и в точке траектории  , в которой скорость обращается в нуль.
, в которой скорость обращается в нуль.
Решение. Скорость и проекции ускорения на естественные оси определяем по формулам (16) и (19). Имеем:

Скорость обращается в нуль, если  , т. е. в момент времени
, т. е. в момент времени  и другие моменты времени, которые в этом примере не рассматриваются. При , т. е. в момент изменения направления движения точки, имеем
и другие моменты времени, которые в этом примере не рассматриваются. При , т. е. в момент изменения направления движения точки, имеем

Подставляя в формулы для  и
и  значение
значение  , получаем
, получаем

Касательное ускорение в этот момент времени обращается в нуль, так как алгебраическая скорость достигает своего максимума.
Частные случаи движения точки
Равномерное движение
При равномерном движении точки по траектории любой формы  ; следовательно, постоянна и алгебраическая скорость
; следовательно, постоянна и алгебраическая скорость  , которая может отличаться от
, которая может отличаться от  только знаком. Так как
только знаком. Так как
то

если принять при  .
.
Равнопеременное движение
Равнопеременным движением называют такое движение по траектории любой формы, при котором касательное ускорение  . Движение является равноускоренным, если алгебраическая скорость
. Движение является равноускоренным, если алгебраическая скорость  и касательное ускорение
и касательное ускорение  имеют одинаковые знаки. Если
имеют одинаковые знаки. Если  и имеют разные знаки, то движение является равнозамедленным.
и имеют разные знаки, то движение является равнозамедленным.
Получим формулы для алгебраической скорости и расстояния при равнопеременном движении. Имеем:

следовательно,

если принять при  .
.
Так как  , то с учетом (21)
, то с учетом (21)

если при  . Выполняя интегрирование, получим
. Выполняя интегрирование, получим

Из (21) и (22) можно определить любые две неизвестные величины, если известны остальные три величины, входящие в эти формулы.
Скорость и ускорение точки в полярных координатах
Рассмотрим движение точки по плоскости. В этом случае движение можно задать в полярных координатах. Для этого примем какую-либо точку  плоскости за полюс и проведем из нее полярную ось, например ось
плоскости за полюс и проведем из нее полярную ось, например ось  (рис. 22). Положение движущейся точки
(рис. 22). Положение движущейся точки  на плоскости известно, если заданы радиус-вектор
на плоскости известно, если заданы радиус-вектор  и полярный угол
и полярный угол  как функции времени, т. е.
как функции времени, т. е.
Полярный угол считается положительным, если он откладывается от полярной оси до радиуса-вектора против часовой стрелки. Радиус-вектор как расстояние от точки  до точки
до точки  принимает только положительные значения.
принимает только положительные значения.
Уравнения (23) называются уравнениями движения точки в полярных координатах. Они являются также уравнениями траектории точки в параметрической форме. Если из (23) исключить параметр — время  , то получим уравнение траектории в полярных координатах:
, то получим уравнение траектории в полярных координатах:
Введем единичный вектор  , направленный по радиусу-вектору от полюса
, направленный по радиусу-вектору от полюса  к точке
к точке  . Тогда
. Тогда
Для скорости  получаем
получаем

Согласно (15), для производной по времени от единичного вектора имеем
где вместо единичного вектора  введен единичный вектор
введен единичный вектор  , направление которого получается поворотом вектора на
, направление которого получается поворотом вектора на  в положительном направлении угла , т. е. против часовой стрелки (рис. 22). После этого для скорости точки получаем
в положительном направлении угла , т. е. против часовой стрелки (рис. 22). После этого для скорости точки получаем

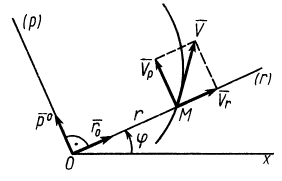
Рис. 22
Это разложение скорости точки на радиальную  и трансверсальную (поперечную)
и трансверсальную (поперечную)  составляющие, т. е.
составляющие, т. е.

где

Для проекций скорости на оси, положительные направления которых совпадают с направлениями единичных векторов  и
и  из (24), получаем
из (24), получаем

Они соответственно называются радиальной и трансверcальной скоростями. В зависимости от знаков производных  и
и  радиальная и трансверсальная скорости могут быть как положительными, так и отрицательными.
радиальная и трансверсальная скорости могут быть как положительными, так и отрицательными.
Используя (24), определяем ускорение точки в полярных координатах. Имеем

Выполняя дифференцирование, получим

Для производной по времени от единичного вектора имеем
dp°ldt =
так как вектор поворачивается с той же угловой скоростью , что и вектор , а единичным вектором, по которому направлен вектор  , является вектор
, является вектор  .
.
После подстановки в выражение для ускорения производных от единичных векторов и объединения слагаемых имеем

Получили разложение ускорения точки на радиальную  и трансверсальную
и трансверсальную  составляющие, т. е.
составляющие, т. е.

Для проекций ускорения на оси  и
и  получаем
получаем

Ускорение  называется радиальным, а
называется радиальным, а  — трансверсальным. Трансверсальное ускорение можно выразить также в форме
— трансверсальным. Трансверсальное ускорение можно выразить также в форме
Это выражение для трансверсального ускорения широко используется при рассмотрении движения планет и искусственных спутников Земли.
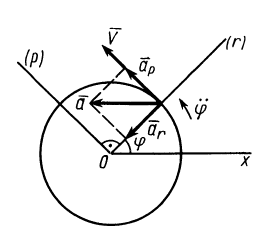
Рис. 23
Радиальная и трансверсальная составляющие ускорения взаимно перпендикулярны, поэтому

Отметим, что для неподвижных осей координат  ,
,  и
и  справедливы формулы
справедливы формулы

Для подвижных осей  и
и  , как следует из (26) и (28), и не равны производным по времени от
, как следует из (26) и (28), и не равны производным по времени от  и
и  .
.
Частные случаи
1. Если  , то имеем прямолинейное движение по прямой . В этом случае
, то имеем прямолинейное движение по прямой . В этом случае  и из (26) и (28) получаем:
и из (26) и (28) получаем:
Эти величины совпадают с ранее полученными выражениями для них при изучении движения точки в декартовых координатах. Только расстояние  следует заменить на координату
следует заменить на координату  .
.
2. При  (рис. 23) получаем движение точки по окружности. В этом случае
(рис. 23) получаем движение точки по окружности. В этом случае  . Из (26) и (28) имеем:
. Из (26) и (28) имеем:

В этих формулах  является угловой скоростью вращения радиуса-вектора, а
является угловой скоростью вращения радиуса-вектора, а  — его угловым ускорением.
— его угловым ускорением.
Пример 4.
Движение точки задано в полярных координатах уравнениями

где  и
и  —постоянные величины. Определить уравнение траектории, скорость и ускорение точки в полярных координатах для момента времени
—постоянные величины. Определить уравнение траектории, скорость и ускорение точки в полярных координатах для момента времени  и момента времени
и момента времени  .
.
Решение. Исключая из уравнений движения параметр , получим следующее уравнение траектории в полярных координатах:
Это уравнение кардиоиды (рис. 24).
Проекции скорости и ускорения на полярные оси определяем по формулам (26) и (28). Имеем:
Для момента времени  из этих формул получаем:
из этих формул получаем:


Векторы скорости и ускорения для моментов времени  и
и  изображаем на рисунке.
изображаем на рисунке.
Пример 5.
Движение точки задано в прямоугольной системе координат уравнениями

где  и
и  —в метрах,
—в метрах,  — в секундах.
— в секундах.
Определить уравнение траектории в координатной форме, а также скорость, ускорение, касательное и нормальное ускорения, радиальную и трансверсальную составляющие скорости и радиус кривизны траектории в момент времени  . Изобразить на рисунке траекторию, скорости и ускорения в указанный момент времени.
. Изобразить на рисунке траекторию, скорости и ускорения в указанный момент времени.
Решение. Уравнения движения представляют собой уравнение траектории в параметрической форме. Для определения уравнения траектории в координатной форме следует из уравнений движения исключить время . Имеем:

следовательно,
Это уравнение параболы. He все точки параболы являются точками траектории. Так как при любых значениях  и
и  , то из уравнений движения получаем дополнительные ограничения для координат точек траектории
, то из уравнений движения получаем дополнительные ограничения для координат точек траектории  .
.
Таким образом, точки траектории удовлетворяют условиям

Часть точек параболы, не являющихся точками траектории, дополнительно появилась при исключении из уравнений движения параметра
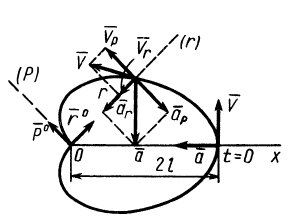
Рис. 24
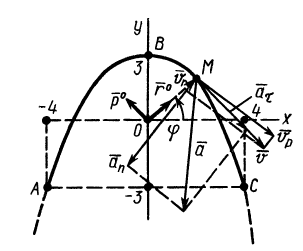
Рис. 25
На рис. 25 приведена траектория точки. Траекторией является только часть параболы  .
.
Определяем проекции скорости на оси и скорость в любой момент времени:
При 

Проекции ускорения в любой момент времени определяем по формулам 
При 
Для модуля касательного ускорения при имеем

Нормальное ускорение при
Для вычисления радиальной скорости предварительно определяем радиус-вектор:

Тогда при получаем

Трансверсальную скорость при определяем по формуле

Координаты движущейся точки при

По координатам отмечаем положение движущейся точки на траектории и, выбрав масштабы, изображаем векторы скорости и ускорения по их проекциям на оси. Для радиальной составляющей скорости  учитываем ее направление, противоположное единичному вектору
учитываем ее направление, противоположное единичному вектору  , так как
, так как  получилось со знаком минус.
получилось со знаком минус.
Для трансверсальной составляющей скорости определено только числовое значение. Из рис. 25 следует, что направление вектора  противоположно направлению единичного вектора
противоположно направлению единичного вектора  (направление
(направление  получается поворотом на
получается поворотом на  вектора против часовой стрелки). Следовательно, в рассматриваемом случае
вектора против часовой стрелки). Следовательно, в рассматриваемом случае  надо взять со знаком минус, т.е.
надо взять со знаком минус, т.е.  .
.
Для проверки правильности определения  можно использовать формулы
можно использовать формулы
Нормальное ускорение  всегда направлено внутрь вогнутости траектории. Направление касательного ускорения
всегда направлено внутрь вогнутости траектории. Направление касательного ускорения  , определяем по
, определяем по  и
и  ; оно оказалось направленным по вектору скорости. Следовательно, точка в рассматриваемый момент времени движется ускоренно.
; оно оказалось направленным по вектору скорости. Следовательно, точка в рассматриваемый момент времени движется ускоренно.
Определим радиус кривизны траектории в момент времени  . Все необходимые величины для этого уже имеются. Получим
. Все необходимые величины для этого уже имеются. Получим
Скорость и ускорение точки в цилиндрических координатах
При движении точки в пространстве иногда используются цилиндрические оси координат. Они получаются добавлением к полярным координатам на плоскости координаты  , отсчитываемой вдоль неподвижном оси
, отсчитываемой вдоль неподвижном оси  , перпендикулярной плоскости, в которой расположены полярные оси координат (рис. 26).
, перпендикулярной плоскости, в которой расположены полярные оси координат (рис. 26).
Положение точки  определяют заданием трех ее цилиндрических координат как функций времени:
определяют заданием трех ее цилиндрических координат как функций времени:

Разложение векторов скорости и ускорения на составляющие, параллельные осям цилиндрической системы координат  ,
,  ,
,  , выразится в следующей форме:
, выразится в следующей форме:

где  — единичные векторы, направленные по осям цилиндрической системы координат. Оси и расположены в одной плоскости с осями
— единичные векторы, направленные по осям цилиндрической системы координат. Оси и расположены в одной плоскости с осями  и
и  .
.
Представим радиус-вектор  точки
точки  как сумму двух векторов, т. е.
как сумму двух векторов, т. е.

Скорость точки получим дифференцированием радиуса-вектора по времени:
Первое слагаемое в этом выражении вычислялось при выводе формулы (24) для скорости точки в полярных координатах. Было получено

Во втором слагаемом постоянный по модулю и направлению единичный вектор  можно вынести за знак производной. Для скорости получается следующее разложение на составляющие, параллельные осям цилиндрической системы координат:
можно вынести за знак производной. Для скорости получается следующее разложение на составляющие, параллельные осям цилиндрической системы координат:

Сравнивая (32) с (30), получаем формулы для проекций скорости на цилиндрические оси координат:

Так как составляющие скорости  ,
,  и
и  , параллельные осям цилиндрической системы координат, взаимно перпендикулярны, то для модуля скорости имеем
, параллельные осям цилиндрической системы координат, взаимно перпендикулярны, то для модуля скорости имеем

Ускорение точки получим дифференцированием по времени вектора скорости:

Первое слагаемое в этом выражении вычислялось при выводе ускорения в полярных координатах:

Во втором слагаемом при дифференцировании выносим вектор  за знак производной. Объединяя результаты дифференцирования, получим следующее разложение ускорения на составляющие, параллельные осям цилиндрической системы координат:
за знак производной. Объединяя результаты дифференцирования, получим следующее разложение ускорения на составляющие, параллельные осям цилиндрической системы координат:

Сравнивая его с (31), получаем формулы для проекций ускорения на цилиндрические оси координат

Составляющие ускорения  взаимно перпендикулярны, поэтому для модуля ускорения имеем
взаимно перпендикулярны, поэтому для модуля ускорения имеем

Скорость и ускорение точки в криволинейных координатах
Положение точки в пространстве в декартовой системе координат определяется тремя координатами:  . Можно выбрать другие три параметра
. Можно выбрать другие три параметра  и назвать их криволинейными или обобщенными координатами точки. Декартовы координаты будут зависеть от криволинейных:
и назвать их криволинейными или обобщенными координатами точки. Декартовы координаты будут зависеть от криволинейных:

Движение точки в криволинейных координатах задается уравнениями

Радиус-вектор  движущейся точки, начало которого находится в неподвижной точке выбранной системы отсчета для рассматриваемого движения, является функцией как декартовых, так и криволинейных координат, т. е.
движущейся точки, начало которого находится в неподвижной точке выбранной системы отсчета для рассматриваемого движения, является функцией как декартовых, так и криволинейных координат, т. е.

Выберем точку  , в которой криволинейные координаты равны нулю, и рассмотрим зависимость
, в которой криволинейные координаты равны нулю, и рассмотрим зависимость  . Получим уравнение в векторной форме координатной линии для
. Получим уравнение в векторной форме координатной линии для  , проходящей через точку . Аналогично получаются уравнения координатных линий
, проходящей через точку . Аналогично получаются уравнения координатных линий  и
и  , проходящих через точку для координат
, проходящих через точку для координат  и
и  .
.
Через каждую точку пространства можно провести три координатные линии, пересекающиеся в этой точке. Вдоль каждой из координатных линий изменяется только одна криволинейная координата, а две другие сохраняют постоянные значения, соответствующие рассматриваемой точке.
Рассмотрим частные производные  . Они как производные от вектора по скалярному аргументу направлены по касательным к координатным линиям, являющимся годографами радиуса-вектора. Введем единичные векторы, направленные по векторам
. Они как производные от вектора по скалярному аргументу направлены по касательным к координатным линиям, являющимся годографами радиуса-вектора. Введем единичные векторы, направленные по векторам  . Эти три единичных вектора
. Эти три единичных вектора  называются базисными векторами. Базисные векторы, как и
называются базисными векторами. Базисные векторы, как и  , направлены в каждой точке по касательным к координатным линиям в сторону возрастания криволинейных координат. Направления возрастания и начало отсчета криволинейных координат выбираются при задании движения.
, направлены в каждой точке по касательным к координатным линиям в сторону возрастания криволинейных координат. Направления возрастания и начало отсчета криволинейных координат выбираются при задании движения.
В общем случае базисные векторы могут быть неортогональными. Используя базисные векторы, получаем
или

Скалярные величины  называются коэффициентами Ламэ.
называются коэффициентами Ламэ.
Для вычисления  учтем, что радиус-вектор через декартовы координаты можно выразить в форме
учтем, что радиус-вектор через декартовы координаты можно выразить в форме

где  — единичные векторы, направленные по осям декартовой системы координат. Из (37) имеем
— единичные векторы, направленные по осям декартовой системы координат. Из (37) имеем
и, следовательно

Скорость точки в криволинейных координатах
При движении точки ее радиус-вектор через обобщенные координаты зависит от времени, т. е.

По определению скорости и правилу дифференцирования сложных функций имеем

где  называется обобщенной скоростью точки.
называется обобщенной скоростью точки.
Используя (36), из (39) получаем

Получено разложение скорости по осям, направление которых совпадает с направлением базисных векторов.
Для величин составляющих скорости по базисным векторам из (40) имеем

В случае ортогональности базисных векторов по формуле (40′) вычисляются проекции вектора скорости на оси, направленные по базисным векторам. В этом случае для квадрата скорости получаем

Ускорение в ортогональных криволинейных координатах
Криволинейные координаты считаются ортогональными, если ортогональны их базисные векторы. В приложениях обычно встречается этот случай. Для ортогональных базисных векторов проекции ускорения точки на их направления вычисляем по формулам

Выражая базисные векторы по (36), из (41) получим

Для дальнейших преобразований (42) следует воспользоваться тождествами

Тождество (43) представляет собой известное правило дифференцирования скалярного произведения двух векторов. Докажем справедливость тождеств Лагранжа (44) и (45). Тождество (44) получим из (39) дифференцированием  , например, по
, например, по  . Учитывая, что производные
. Учитывая, что производные  не могут зависеть от имеем
не могут зависеть от имеем
Аналогично,
т.е.
Справедливость тождества (44) установлена.
Для доказательства тождества (45) продифференцируем  из (39) по
из (39) по  . Получим
. Получим

Учитывая, что  не может зависеть от обобщенных скоростей, и дифференцируя ее по времени как сложную функцию времени, имеем
не может зависеть от обобщенных скоростей, и дифференцируя ее по времени как сложную функцию времени, имеем

Правые части (46) и (47) совпадают, так как они отличаются только порядком частного дифференцирования, от которого частные производные не зависят. Следовательно, тождество (45) доказано. Используя тождества, преобразуем выражение в скобках из (42). Получим
Учитывая, что  , и вводя функцию
, и вводя функцию  , из (42) с учетом (48) имеем
, из (42) с учетом (48) имеем

По формулам (49) можно вычислить проекции ускорения точки на оси, направленные по базисным ортогональным векторам.
Скорость и ускорение в сферических координатах
В качестве примера использования полученных формул вычислим скорость и ускорение точки в сферических координатах. Сферическими координатами точки  являются величины
являются величины  (рис. 27). Координатной линией для
(рис. 27). Координатной линией для  является прямая
является прямая  с базисным вектором
с базисным вектором  . Координатной линией для
. Координатной линией для  служит параллель сферы с базисным вектором
служит параллель сферы с базисным вектором  и координатной линией
и координатной линией  — меридиан сферы с базисным вектором
— меридиан сферы с базисным вектором  .
.
Базисные векторы оказались ортогональными. Декартовы координаты  точки
точки  через сферические выражаются следующими зависимостями:
через сферические выражаются следующими зависимостями:

По формулам (38) вычисляем коэффициенты Ламэ. Имеем:
Проекции скорости на оси, направленные по базисным векторам, определяем согласно (40′). Получаем
После этого
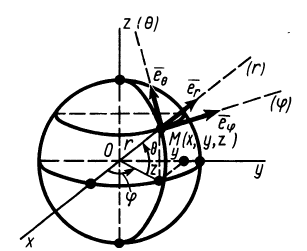
Рис. 27
Для квадрата скорости и функции  имеем
имеем
Проекции ускорения на оси, направленные по базисным векторам, вычисляем по формулам (49). Имеем
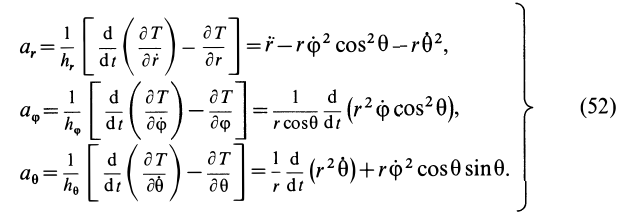
Для вектора ускорения получаем

Модуль ускорения будет иметь следующее выражение:
Аналогично можно вычислить ранее полученные скорость и ускорение точки в цилиндрических координатах.
Справочный материал по кинематике точки
Кинематика изучает механическое движение тел без учета факторов, обусловливающих это движение.
Основными понятиями в кинематике являются движение, ‘пространство и время.
Движение, как было отмечено раньше, обнимает собой все происходящие во вселенной изменения.
Пространство и время представляют собой формы существования материи, без которых немыслимы ни существование, ни движение материи.
Отделить движение от материи нельзя, так же как нельзя себе представить движение материи, происходящее вне времени и пространства.
В кинематике, так же как и вообще в теоретической механике, мы будем рассматривать простейшую форму движения материи — механическую, т. е. перемещение тел в пространстве и во времени. Движение тела будет кинематически определено, если в каждый данный момент времени будет известно положение тела относительно выбранной системы отсчета. Положение тела при его движении определяется по отношению к какой-либо системе координат, связанной с другим телом, например с Землей.
Однако при изучении движения некоторых механических систем эта система отсчета может оказаться недостаточно точной. Так, при опыте с маятником Фуко, где заметно сказывается вращение Земли, за «неподвижную» систему следует принять Солнце. В других вопросах и этого оказывается недостаточно. Тогда неподвижную систему придется перенести на «неподвижную» звездную систему.
В том случае, когда положение рассматриваемого тела остается с течением времени неизменным по отношению к выбранной системе отсчета, про такое тело говорят, что оно находится в покое по отношению к данной системе отсчета.
По отношению к различным системам отсчета тело может совершать различные движения или находиться в покое. Так, например, если тело находится в относительном покое по отношению к Земле, оно уже не будет находиться в покое по отношению к Солнцу, так как это тело будет двигаться вместе с Землей вокруг Солнца. В этом смысле покой и движение тела относительны и зависят от выбранной системы отсчета.
В последующем изложении, если об этом не будет сделано специальной оговорки, мы будем рассматривать движение материальной точки или абсолютно твердого тела, происходящее по отношению к координатным осям, связанным с Землей, которую условно будем считать неподвижной.
При вычислениях все линейные величины мы обычно будем выражать в метрах или сантиметрах, а время в секундах.
При измерении времени следует различать понятия: начальный момент времени, момент времени и промежуток времени.
Начальным моментом времени называется произвольный момент.времени, принятый условно за начало отсчета времени  .
.
Под моментом времени понимается число секунд, прошедшее от начального момента времени, соответствующего началу движения тела (или когда мы начали наблюдать за этим движением), до данного момента.
Промежуток времени определяет число секунд, отделяющих два каких-либо последовательных Момента времени 
Способы задания движения точки
Первый способ задания движения точки
Изучение кинематики начнем с рассмотрения движения точки.
Пусть точка М (рис. 139) совершает движение, описывая в пространстве кривую АВ. Эта непрерывная кривая, которую описывает точка М при своем движении, называется ее траекторией. Если траектория прямая, то движение точки называется прямолинейным, если же кривая, то — криволилейным.
Очевидно, что траектория точки есть годограф радиуса-вектора  , определяющего положение точки М на ее траектории. При движении точки М радиус-вектор
, определяющего положение точки М на ее траектории. При движении точки М радиус-вектор  , определяющий ее положение, изменяется по величине и направлению с течением времени. Функциональная зависимость радиуса-вектора
, определяющий ее положение, изменяется по величине и направлению с течением времени. Функциональная зависимость радиуса-вектора  от времени
от времени  может быть выражена равенством:
может быть выражена равенством:

Если зависимость (66) задана, то тем самым можно определить и положение точки М в пространстве в любой момент времени. Это есть первый способ задания движения точки.
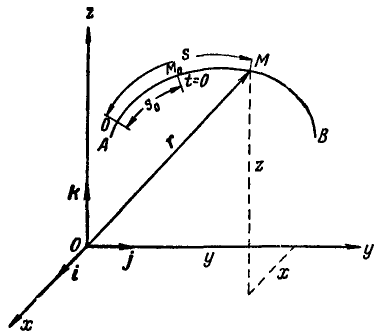
Рис. 139.
Второй способ задания движения точки
Однако движение точки может быть задано иначе. В самом деле, положение движущейся точки в пространстве в данный момент определяется тремя координатами  . Эти координаты при движении являются функциями времени (рис. 139):
. Эти координаты при движении являются функциями времени (рис. 139):
Если известна зависимость координат от времени, то .можно в любой момент указать положение, движущейся точки в пространстве.
Поэтому второй способ задания движения точки заключается в том,что нам даны уравнения движения (67). Если точка движется в плоскости, то ее положение будет определяться двумя уравнениями:

Исключая, например, из уравнений (67а) время t, получим уравнение траектории точки, движущейся в плоскости:
Уравнения (67) и (67а) могут рассматриваться так же, как параметрические уравнения траектории, причем роль параметра играет время t.
Координаты  точки М можно рассматривать как проекции радиуса вектора
точки М можно рассматривать как проекции радиуса вектора  на координатные оси. Поэтому, обозначив единичные векторы координатных осей через
на координатные оси. Поэтому, обозначив единичные векторы координатных осей через  на основании равенства (4) будем иметь:
на основании равенства (4) будем иметь:

Если движение точки происходит в плоскости, например, хОу (рис. 140), то уравнение (66) может быть сведено к заданию модуля  и полярного угла
и полярного угла  , как функций времени:
, как функций времени:

Уравнения (69) называются уравнениями движения точки в полярных координатах.
Между уравнениями движения (67а) и (69) имеется такая же зависимость, как между прямоугольными и полярными координатами. Из треугольника ОАВ (рис. 140) имеем:  и обратно:
и обратно:  и
и
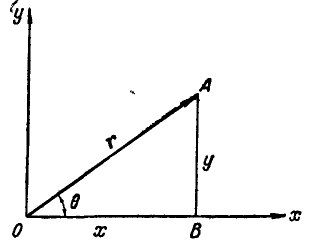
Рис. 140.
Третий способ задания движения точки
Наконец, движение точки М может быть задано по третьему способу. Пусть точка М движется по заданной траектории (рис. 139).
Для определения положения точки М в данный момент времени выберем на ее траекторий неподвижную точку О, которую назовем началом отсчета. Тогда положение точки в данный момент будет определяться расстоянием ее от начала отсчета. Условимся пройденные расстояния считать положительными, если точка находится по одну сторону от начала отсчета, и отрицательными — если по другую. Следует заметить, что при  точка М не обязательно будет находиться в начале отсчета О, а может занимать некоторое положение
точка М не обязательно будет находиться в начале отсчета О, а может занимать некоторое положение  определяемое расстоянием
определяемое расстоянием  от начала отсчета. Это расстояние, соответствующее начальному моменту, называется начальным расстоянием. Так как пройденный путь
от начала отсчета. Это расстояние, соответствующее начальному моменту, называется начальным расстоянием. Так как пройденный путь  изменяется с течением времени, то, следовательно,
изменяется с течением времени, то, следовательно,  является некоторой функцией от t:
является некоторой функцией от t:

Уравнение (70) называется уравнением движения, или законом движения точки.
Заданием траектории и уравнения движения (70) вполне определяется положение движущейся точки в пространстве в любой момент времени. В этом заключается третий способ задания движения точки. ‘
Задача №1
Для следующих случаев задания движения точки требуется:
a) найти уравнение траектории и вычертить ее;
b) указать начальное положение точки на ее траектории;
c) найти закон расстояний, приняв за начало отсчета путей начальное положение точки;
d) показать направление движения точки по ее траектории.

Решение. Для вычерчивания траектории мы могли бы дать времени  ряд значений, например,
ряд значений, например,  и т. д. (см. табл. 5), для которых получили бы ряд точек с известными координатами. Соединив полученные точки плавной кривой, получим траекторию движущейся точки. Однако в большинстве случаев важно получить уравнение траектории, которое выражает аналитически зависимость между х и у. Для этого, как мы знаем, следует из уравнений движения исключать время
и т. д. (см. табл. 5), для которых получили бы ряд точек с известными координатами. Соединив полученные точки плавной кривой, получим траекторию движущейся точки. Однако в большинстве случаев важно получить уравнение траектории, которое выражает аналитически зависимость между х и у. Для этого, как мы знаем, следует из уравнений движения исключать время  .
.
Таблица 5 Таблица 6
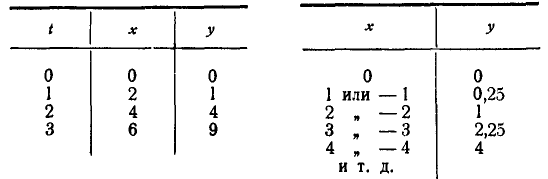
Решая первое из уравнений движения относительно  и подставляя найденное значение
и подставляя найденное значение  во второе уравнение, имеем:
во второе уравнение, имеем:
Полученное уравнение является уравнение параболы. Посторим ее (рис. 141) по точкам (талб. 6).
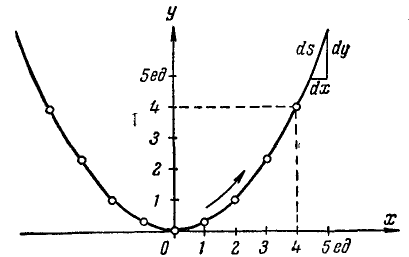
Рис. 141.
Для нахождения начального положения точки на ее траектории подставим в заданные уравнения движения значение  . Тогда получим:
. Тогда получим:  и
и  ; поэтому в начальный момент точка находится в начале координат.
; поэтому в начальный момент точка находится в начале координат.
Закон пройденных расстояний (70) найдется, если воспользоваться известной из дифференциальной геометрии зависимостью между дифференциалом дуги  и дифференциалом координат
и дифференциалом координат  и
и  (рис. 141):
(рис. 141):
но так как  , то
, то
Отсюда находим:

Так как по условию начало отсчета следует взять в начальном положении точки, то, полагая в последнем выражении  , получим
, получим  ; тогда:
; тогда:

Направление движения точки по траектории найдем, если в уравнения движения точки (67а) или (70) вместо t подставим ряд положительных возрастающих значений, например t = 0, t = 1, t = 2 (табл. 5). Мы видим, что при возрастании t возрастают также и координаты движущейся точки, а поэтому движение точки будет происходить в направлении, показанном стрелкой (рис. 141).

Ответ: прямая линия 


Решение. Для исключения времени t возведем обе части равенства каждого из уравнений в квадрат и сложим; тогда имеем:
Отсюда заключаем, что траектория точки — окружность радиусом 3 единицы и с центром в начале координат (рис. 142).
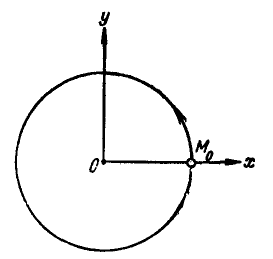
Рис. 142.
При  , а поэтому в начальный момент точка находится на оси
, а поэтому в начальный момент точка находится на оси  в положении
в положении  . Беря производную от координат по времени, получим:
. Беря производную от координат по времени, получим:

далее:

откуда 
Из уравнений движения видно, что при возрастании t абсцисса х уменьшается, ордината .у увеличивается, а поэтому точка будет двигаться против часовой стрелки в направлении, указанном стрелкой.

Указание: для нахождения уравнения движения берем производную по времени t от координат х и у, после чего получаем  . Интегрируя полученное равенство, находим
. Интегрируя полученное равенство, находим  Постоянная интегрирования
Постоянная интегрирования  определяется из условия, что при
определяется из условия, что при 
Ответ: прямая 
Задача №2
С дирижабля, летящего на высоте 600 м, сбросили груз, движение которого в недрах и секундах выражается уравнениями:  Найти уравнение траектории груза, дальность его полета в горизонтальном направлении и время падения.
Найти уравнение траектории груза, дальность его полета в горизонтальном направлении и время падения.
Решение. Исключая из уравнений движения время t, найдем, что траекторией груза будет парабола:  . Подставляя в уравнение траектории вместо у значение
. Подставляя в уравнение траектории вместо у значение  , получим дальность полета груза в горизонтальном направлении:
, получим дальность полета груза в горизонтальном направлении:  . Время падения груза найдем, если, например, в первое из уравнений движения груза вместо х подставим
. Время падения груза найдем, если, например, в первое из уравнений движения груза вместо х подставим  и решим уравнение относительно t; имеем:
и решим уравнение относительно t; имеем:
Задача №3
Движение точки в сантиметрах и секундах выражается уравнением:
Построить график расстояний.
Решение. Графиком расстояний называется кривая зависимости пройденного расстояния В нашем случае кривая расстояний представляет собой синусоиду. Построим ее по точкам (табл. 7).
Таблица 7
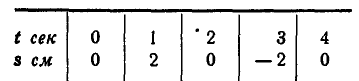
Имея график расстояний (рис. 142а), можно для любого момента времени найти величину пути, пройденного движущейся точкой от начала отсчета, а следовательно, и указать положение точки на ее траектории, которая должна быть дана.
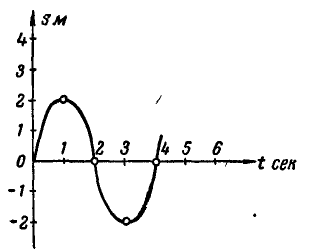
Рис. 142а.
Скорость точки
Бели точка движется по траектории так, что в любые два равных промежутка времени она проходит равные пути, то такое движение точки называется равномерным.
Скоростью равномерного движения называется путь, пройденный точкой в единицу времени, например в секунду, минуту, час и т. п. Пусть в начальный момент точка находилась на расстоянии  от начала отсчета, а в момент t — на расстоянии s; тогда, согласно определению, величина скорости этого движения будет постоянна и определится по формуле:
от начала отсчета, а в момент t — на расстоянии s; тогда, согласно определению, величина скорости этого движения будет постоянна и определится по формуле:
откуда расстояние точки s от начала отсчета в любой момент времени t будет:

Уравнение (71) называется уравнением равномерного движения.
Найдем теперь скорость любого движения точки. В этом случае она определяется в зависимости от того, как задано движение точки.
Пусть движение точки задано по первому способу, т. е. по уравнению (66); допустим, что в момент t движущаяся точка находилась в положении М, определяемом радиусом-вектором  (рис. 15).
(рис. 15).
За малый промежуток времени  точка перейдет в положение
точка перейдет в положение  , определяемое уже другим радиусом-вектором
, определяемое уже другим радиусом-вектором  , при этом вектор перемещения
, при этом вектор перемещения  точки М за время
точки М за время  равен
равен 
Если бы точка М двигалась не по дуге кривой  а по хорде
а по хорде  то, предположив, что эту хорду точка проходит движением равномерным, найдем среднюю скорость ее, как отношение вектора перемещения
то, предположив, что эту хорду точка проходит движением равномерным, найдем среднюю скорость ее, как отношение вектора перемещения  к сбответствующему промежутку времени
к сбответствующему промежутку времени  , т. е.
, т. е.  Направление же вектора средней скорости совпадает с направлением вектора перемещения
Направление же вектора средней скорости совпадает с направлением вектора перемещения  .
.
Истинную скорость движущейся точки в рассматриваемом положении мы должны принять, как векторную величину, равную пределу отношения вектора перемещения  к соответствующему промежутку времени
к соответствующему промежутку времени  стремящемуся к нулю:
стремящемуся к нулю:

Что касается направления истинной скорости, то она, следуя направлению хорды, будет в пределе направлена по касательной к траектории в данной точке.
Следовательно, вектор скорости равен векторной производной радиуса-вектора по времени и направлен по касательной к траектории в сторону движения точки.
Для нахождения скорости точки, если задано ее движение по второму способу, т. е. по уравнениям (67), выразим сначала радиус-вектор  точки через его компоненты по формуле (68):
точки через его компоненты по формуле (68):

Тогда на основании уравнения (72) имеем:

С другой стороны, обозначая проекции скорости на координатные оси через  , напишем:
, напишем:

Сравнивая коэффициенты при одинаковых единичных векторах, найдем проекции скорости на координатные оси:

В дальнейшем первые производные по времени будем обозначать  , а вторые производные —
, а вторые производные — 
Итак, проекция скорости на неподвижную ось равна первой производной от соответствующей координаты по времени. Модуль скорости находим по выражению:

Направление же вектора скорости к координатным осям определится через косинусы углов, которые составляет вектор скорости с осями координат.
Пусть теперь движение точки задано траекторией и законом движения, выраженным формулой (70).
Допустим, что за промежуток времени  точка перешла из положения М в положение
точка перешла из положения М в положение  (рис. 143), пройдя путь, равный длине дуги
(рис. 143), пройдя путь, равный длине дуги 
Заменим движение точки М по дуге кривой  движением по хорде
движением по хорде  ; тогда, рассматривая это движение, как равномерное, найдем, что вектор средней скорости точки за промежуток времени
; тогда, рассматривая это движение, как равномерное, найдем, что вектор средней скорости точки за промежуток времени  равен
равен 
Направление же средней скорости воображаемого движения будет совпадать с направлением вектора перемещения  направленного по хорде. Заменив криволинейную траекторию точки ломаной линией
направленного по хорде. Заменив криволинейную траекторию точки ломаной линией  мы тем самым криволинейное движение заменяем рядом прямолинейных и равномерных движений, причем переход от одного прямолинейного движения к другому происходит скачками.
мы тем самым криволинейное движение заменяем рядом прямолинейных и равномерных движений, причем переход от одного прямолинейного движения к другому происходит скачками.
Рис. 143.
Увеличивая число хорд и тем самым уменьшая их длины, мы будем точнее приближаться к действительному криволинейному движению, так как разности между дугами  и хордами
и хордами  будут уменьшаться. Вместе с этим переход от одной хорды к другой будет постепенно сглаживаться. Когда число хорд будет стремиться к бесконечности, а длина каждой хорды — к нулю, средние скорости будут стремиться также к некоторому пределу, который представит собой истинную скорость в данной точке траектории:
будут уменьшаться. Вместе с этим переход от одной хорды к другой будет постепенно сглаживаться. Когда число хорд будет стремиться к бесконечности, а длина каждой хорды — к нулю, средние скорости будут стремиться также к некоторому пределу, который представит собой истинную скорость в данной точке траектории:
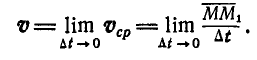
Что касается направления истинной скорости, то она, следуя направлению хорды, будет в пределе направлена по касательной к траектории в данной точке.
Умножив числитель и знаменатель последнего равенства на  , получим:
, получим:

Но так как предел отношения длины хорды к длине дуги равен единице, а направление  в пределе совпадает с касательной, то
в пределе совпадает с касательной, то является единичным вектором
является единичным вектором  касательной в точке М.
касательной в точке М.
Отсюда находим:

где

Задача №4
Движение точки в метрах и секундах выражается уравнениями: 
Найти уравнение траектории, величину и направление скорости.
Решение. Уравнение траектории прямая По формулам (73) найдем проекции скорости на координатные оси:
По формулам (73) найдем проекции скорости на координатные оси:

Величина скбрости найдется по формуле (74):

Направление же скорости определяется косинусами углов, которые составляет вектор скорости с координатными осями:

откуда 
Задача №5
Движение снаряда в метрах и секундах выражается уравнениями: 
Требуется найти: уравнение траектории; высоту  и дальность
и дальность  полета; скорости
полета; скорости  в наивысшей точке и в момент, когда снаряд пересечет ось Ох (рис. 144).
в наивысшей точке и в момент, когда снаряд пересечет ось Ох (рис. 144).
Рис. 144.
Решение. Траекторией снаряда является равнобочная парабола:
Дальность полета снаряда определится, если принять в уравнении траектории 
 откуда
откуда  и
и  ; ясно, что
; ясно, что 
Для нахождения высоты полета снаряда следует в уравнении траектории принять:  тогда получим:
тогда получим:

Найдем теперь проекции скорости снаряда на координатные оси:
В наивысшей точке вектор скорости горизонтален, а потому:

Для определения скорости снаряда в момент, когда он пересекает ось Ох, вычислим время полета снаряда, взяв хотя бы первое из уравнений движения и приняв 

откуда находим:

Направление скорости определится косинусами углов:
откуда 
Задача №6
Определить траекторию точки, если проекции ее скорости на координатные оси в сантиметрах и секундах выражаются уравнениями:  в момент
в момент  ордината точки равнялась 2 см, а абсцисса — нулю.
ордината точки равнялась 2 см, а абсцисса — нулю.
Решение. Найдем сначала уравнения движения точки, для чего проинтегрируем заданные уравнения проекций скорости:

Постоянные интегрирования  и
и  найдутся из начальных условий; при
найдутся из начальных условий; при  и
и  ; далее, при
; далее, при  и
и 
Подставляя вместо и их значения, найдем:  и
и
Исключая из полученных уравнений движения время t, найдем, что траекторией точки является окружность  с центром С(0; 4).
с центром С(0; 4).
Задача №7
Даны графики скоростей двух точек, движущихся по одной прямой от одного начального положения (рис. 145). По истечении какого времени точки встретятся?
Решение. Вообще графиком скорости называется кривая зависимости скорости от времени:

Между пройденным расстоянием и величиной скорости точки имеется зависимость (75), из которой найдем элементарное перемещение точки 
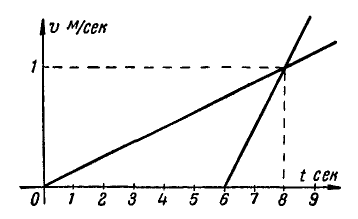
Рис. 145.
Расстояние же s, пройденное точкой между моментами  и
и  , найдется как сумма ее элементарных перемещений и выразится определенным интегралом:
, найдется как сумма ее элементарных перемещений и выразится определенным интегралом:
Отсюда заключаем, что путь, пройденный точкой за время  численно равен площади, заключенной между осью Ох, ординатами
численно равен площади, заключенной между осью Ох, ординатами  и кривой
и кривой 
В нашей задаче точки встретятся, когда расстояния, пройденные ими от начала движения, будут одинаковы, а для этого необходимо, чтобы соответствующие площади треугольников, взятых с графиков скоростей, были равны. Обозначая неизвестное время встречи точек через t, скорость первой точки в момент встречи через  , а скорость второй — через
, а скорость второй — через  , имеем:
, имеем:
так как:
окончательно получим 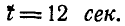
Ускорение точки
Остановимся на некоторых вопросах геометрии. Пусть имеется некоторая неплоская кривая (рис. 146). Возьмем на ней две весьма близко расположенные точки  и проведем в них касательные
и проведем в них касательные  к кривой. Обозначим единичные векторы касательных через
к кривой. Обозначим единичные векторы касательных через , а дугу
, а дугу  — через
— через  . Проведем через касательную Т плоскость, параллельную
. Проведем через касательную Т плоскость, параллельную  , для чего достаточно перенести
, для чего достаточно перенести  , в точку М и тогда плоскость Н, проходящая через
, в точку М и тогда плоскость Н, проходящая через  , будет искомой. При приближении точки
, будет искомой. При приближении точки  к точке М плоскость Н приближается к некоторому предельному положению, которое называется соприкасающейся плоскостью в точке М. В случае плоской кривой сама кривая расположена в соприкасающейся плоскости. Плоскость, проведенная в точке М перпендикулярно к касательной Т, называется нормальной плоскостью. Все прямые, проходящие через точку М и лежащие в нормальной плоскости, называются нормалями, а линия пересечения плоскостей нормальной и соприкасающейся называется главной нормалью и обозначается буквой N.
к точке М плоскость Н приближается к некоторому предельному положению, которое называется соприкасающейся плоскостью в точке М. В случае плоской кривой сама кривая расположена в соприкасающейся плоскости. Плоскость, проведенная в точке М перпендикулярно к касательной Т, называется нормальной плоскостью. Все прямые, проходящие через точку М и лежащие в нормальной плоскости, называются нормалями, а линия пересечения плоскостей нормальной и соприкасающейся называется главной нормалью и обозначается буквой N.
Для окружности направление главной нормали совпадает с направлением ее радиуса. Прямая, перпендикулярная к касательной Т и к главной нормали N, называется бинормалью и обозначается буквой В. Таким образом, три взаимно-перпендикулярных направления N, В и Т могут быть приняты за координатные оси, скрепленные с некоторой точкой М, выбранной на кривой (рис. 147).
Рис. 146 Рис. 147
Такие оси, перемещающиеся вместе с движущейся точкой М, называются естественными осями. Эти оси являются ребрами естественного триэдра, или естественного трехгранника, образованного тремя плоскостями, проходящими через каждые две естественные оси. На рисунке 147 соприкасающаяся плоскость проходит через оси Т и N, нормальная — через N и В и третья плоскость триэдра проходит через В и Т.
Единичные векторы естественных осей обозначены через  ,
,  и
и  .
.
Угол  между касательными
между касательными  (рис. 146) называется углом смежности, а отношение
(рис. 146) называется углом смежности, а отношение  называется средней кривизной кривой. Кривизной кривой К в данной точке называется предел отношения
называется средней кривизной кривой. Кривизной кривой К в данной точке называется предел отношения  при
при  , т. е.:
, т. е.:

Величина  , обратная кривизне, называется радиусом кривизны и равна:
, обратная кривизне, называется радиусом кривизны и равна:

Если от точки М (рис. 146) в сторону вогнутости кривой отложить в соприкасающейся плоскости отрезок, равный  , то конец его С определит центр кривизны кривой в данной ее точке.
, то конец его С определит центр кривизны кривой в данной ее точке.
Для прямой  , поэтому ее кривизна
, поэтому ее кривизна  , а радиус кривизны равен бесконечности:
, а радиус кривизны равен бесконечности:
Для окружности:

На этом мы заканчиваем изучение вопросов геометрии и рассмотрим далее изменение вектора скорости движущейся точки. Пусть в моменты  движущаяся точка будет находиться в положениях
движущаяся точка будет находиться в положениях  и будет иметь соответствующие скорости
и будет иметь соответствующие скорости  (рис. 148,а). Если векторы всех скоростей перенести в общее произвольное начало О (рис. 148,0), то геометрическим местом концов векторов всех скоростей, перенесенных в точку О, будет кривая, которая называется годографом скоростей.
(рис. 148,а). Если векторы всех скоростей перенести в общее произвольное начало О (рис. 148,0), то геометрическим местом концов векторов всех скоростей, перенесенных в точку О, будет кривая, которая называется годографом скоростей.
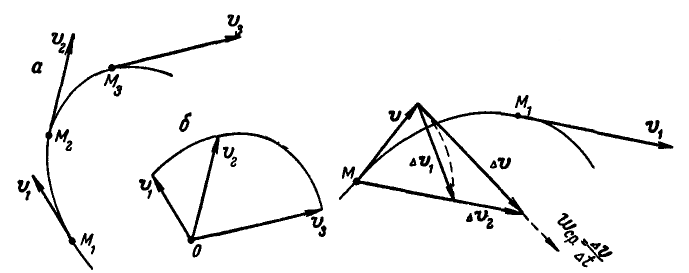
Рис. 148. Рис. 149.
Вообще говоря, с течением времени скорость будет изменяться и по величине и по направлению. Взяв изменение скорости  за какой-либо промежуток времени
за какой-либо промежуток времени  , назовем средним ускорением отношение
, назовем средним ускорением отношение  (рис. 149). На рисунке 149 изменение скорости
(рис. 149). На рисунке 149 изменение скорости  представлено для наглядности в виде двух компонентов
представлено для наглядности в виде двух компонентов  из которых первый
из которых первый  характеризует изменение скорости только но направлению, а второй
характеризует изменение скорости только но направлению, а второй  — только по величине. Предел же этого отношения при
— только по величине. Предел же этого отношения при  называется истинным ускорением в данной точке траектории. Обозначив вектор ускорения точки через
называется истинным ускорением в данной точке траектории. Обозначив вектор ускорения точки через  , получим:
, получим:

на основании равенства (72). Следовательно, вектор ускорения равен первой векторной производной вектора скорости по времени или второй векторной производной радиуса вектора по времени. Подставляя в последнее равенство вместо вектора  его значение
его значение  , определяемое равенством (75а), имеем:
, определяемое равенством (75а), имеем:

Ha основании равенства (22) находим:
но так как согласно формулам (75), (77) и (78)
то окончательно имеем:
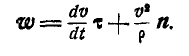
Таким образом, полное ускорение точки  состоит из двух компонентов
состоит из двух компонентов  и
и  , из которых первый называется касательным или тангенциальным ускорением, направлен по касательной к траектории и характеризует изменение скорости вдоль ее направления, второй же называется нормальным ускорением, направлен по главной нормали к центру кривизны и характеризует изменение скорости перпендикулярно к ее направлению.
, из которых первый называется касательным или тангенциальным ускорением, направлен по касательной к траектории и характеризует изменение скорости вдоль ее направления, второй же называется нормальным ускорением, направлен по главной нормали к центру кривизны и характеризует изменение скорости перпендикулярно к ее направлению.
Обозначая соответственно касательное ускорение через  , а нормальное — через
, а нормальное — через  , имеем (рис. 150):
, имеем (рис. 150):

Рис. 150.
Модули касательного и нормального ускорений можно рассматривать так же, как проекции полного ускорения на касательную и главную нормаль; проекция же полного ускорения на бинормаль равна нулю, так как полное ускорение расположено в соприкасающейся плоскости. Итак, имеем:

При вектор
вектор  имеет направление
имеет направление  , при
, при  — направление, противоположное
— направление, противоположное  .
.
Если точка движется прямолинейно, то  , так как
, так как  , а если при этом и равномерно, то и
, а если при этом и равномерно, то и  , так как
, так как 
Движение точки с постоянным касательным ускорением называется равнопеременным. Рассмотрим равнопеременное и прямолинейное движение точки. В этом случае  , а потому
, а потому  Интегрируя полученное выражение два раза, имеем:
Интегрируя полученное выражение два раза, имеем:
откуда  и, следовательно,
и, следовательно,

Далее:

при  , а поэтому:
, а поэтому:

Уравнения (82) и (83) называются уравнениями равнопеременного движения. Здесь  — начальное расстояние, a
— начальное расстояние, a  — начальная скорость. Если
— начальная скорость. Если  , то движение называется равноускоренным, если
, то движение называется равноускоренным, если  — равнозамедленным.
— равнозамедленным.
Уравнения (82) и (83) применимы также и для случая криволинейного движения точки, положив 
Посмотрим теперь, как находится ускорение точки в том случае, когда движение ее задано по второму способу, т. е. по уравнениям (67). Так как ускорение точки  а по уравнению (72)
а по уравнению (72)  то, следовательно,
то, следовательно,
Выражая вектор  через компоненты, имеем:
через компоненты, имеем:
с другой стороны, обозначив проекции ускорения на координатные оси через  , имеем:
, имеем:

Сравнивая коэффициенты при одинаковых единичных векторах, получим:

Следовательно, проекция ускорения на неподвижную ось равна второй производной от соответствующей координаты по времени. Модуль ускорения будет:

Направление же вектора ускорения к координатным осям определится через косинусы углов.
Задача №8
Найти нормальное и касательное ускорения точки, движение которой в метрах и секундах выражается уравнениями:

Решение. Найдем сначала по формулам (73) и (84) проекции скорости и ускорения на координатные оси:

Далее находим, что  и
и 
С другой стороны, по формуле (80):  ; но так как по равенству (81):
; но так как по равенству (81):  , то
, то 
Нормальное ускорение  можно было бы найти иначе. Исключая из уравнения движения время t, найдем, что уравнение траектории — окружность
можно было бы найти иначе. Исключая из уравнения движения время t, найдем, что уравнение траектории — окружность  радиус которой
радиус которой  По формуле (81):
По формуле (81):

- Заказать решение задач по теоретической механике
Задача №9
Движение точки выражается в метрах и секундах уравнениями: 
Найти скорость точки, ускорение, траекторию и радиус кривизны в наивысшей точке.
Указание: в наивысшей точке параболы (рис. 144) вектор скорости, направленный по касательной, горизонтален, поэтому 
 и
и  Зная
Зная  , по формуле (81) находим
, по формуле (81) находим 
Траектория точки — парабола  радиус кривизны в наивысшей точке
радиус кривизны в наивысшей точке 
Ответ: 
Задача. Точка движется по некоторой кривой так, что в момент / = 4 сек, вектор ее полного ускорения составляет угол 30° с направлением нормали к траектории. Определить радиус кривизны
Задача №10
Движение автомобиля по дороге, имеющей форму двух четвертей окружности радиуса  и прямой вставки между ними, выражается в метрах и секундах уравнением
и прямой вставки между ними, выражается в метрах и секундах уравнением  . Построить графики пути, скорости, касательного и нормального ускорений автомобиля, приняв за начало отсчета пройденных путей точку О (рис. 151, а).
. Построить графики пути, скорости, касательного и нормального ускорений автомобиля, приняв за начало отсчета пройденных путей точку О (рис. 151, а).
Решение. По формулам (75) и (81) находим выражение скорости, касательного и нормального ускорений автомобиля:
Графики пути, скорости нормального и касательного ускорений легко строятся по точкам (рис. 151, б, в, г, д). Следует обратить внимание на то, что на прямолинейном участке пути  , так как
, так как  . Для того чтобы узнать граничные промежутки времени, когда , надо в заданное уравнение движения
. Для того чтобы узнать граничные промежутки времени, когда , надо в заданное уравнение движения  вместо
вместо  подставить сначала длину первого закругления, равную 15,7 м, а затем длину первого закругления, сложенную с длиной прямой вставки, равную 25,7 м.
подставить сначала длину первого закругления, равную 15,7 м, а затем длину первого закругления, сложенную с длиной прямой вставки, равную 25,7 м.
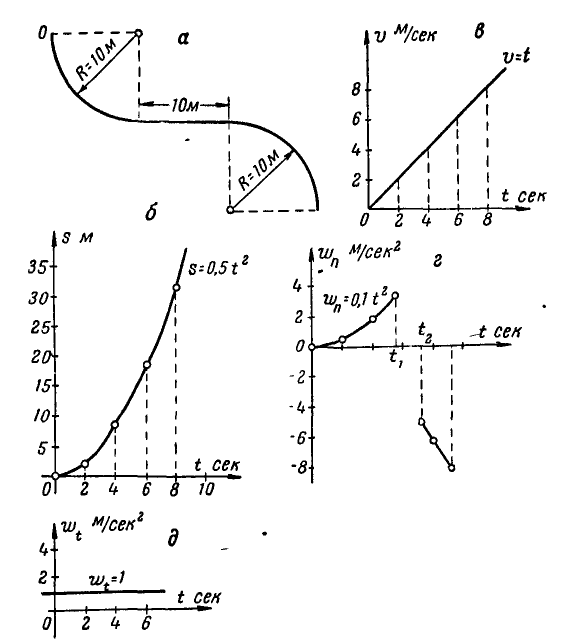
Рис. 151.
Отсюда получаем два граничных момента времени:  и
и  , соответствующих равенству нулю нормального ускорения.
, соответствующих равенству нулю нормального ускорения.
Задача №11
Для точки, движущейся по прямой, диаграмма расстояний представляет собой четверть эллипса (рис. 152). Выразить расстояние, скорость и ускорение движущейся точки, как функции времени. Построить диаграммы (графики) скоростей и ускорений.
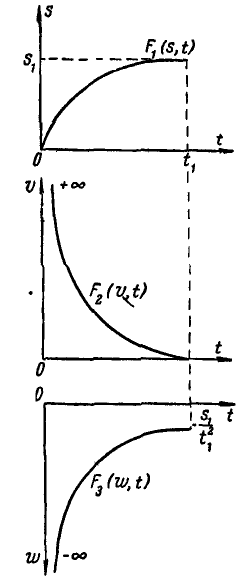
Рис. 152.
Решение. Выразим сначала аналитически зависимости: 
 и
и 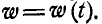
Зависимость между расстоянием s и временем t по заданному графику пути может быть выражена в форме уравнения эллипса (рис. 152):
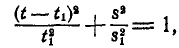
откуда:
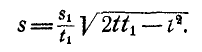
При  а при
а при  т.е. составленное уравнение движения иточки удовлетворяет заданному графику пути.
т.е. составленное уравнение движения иточки удовлетворяет заданному графику пути.
Выразим теперь  , как функцию времени. По формуле (75) находим:
, как функцию времени. По формуле (75) находим:

При  а при
а при 
Величина ускорения найдется по первой из формул (81):

При  а при
а при 
На рисунке 152 изображены графики: скорости  и ускорения
и ускорения 
Последние два графика можно построить по точкам, зная  и
и  , как функции времени, или же получить графически, путем графического дифференцирования графика пути
, как функции времени, или же получить графически, путем графического дифференцирования графика пути  Следует отметить, что графиком ускорений вообще называется кривая:
Следует отметить, что графиком ускорений вообще называется кривая:

Задача №12
Найти величину и направление ускорения и радиус кривизны траектории точки М колеса радиуса R = 1 м, катящегося без скольжения по горизонтальной оси Ох (рис. 153). Известно, что скорость центра колеса 
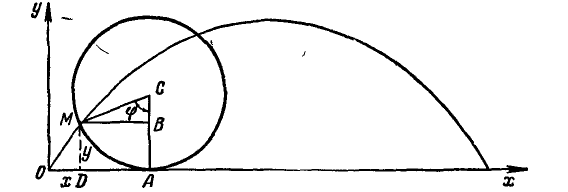
Рис. 153.
Решение. Если в начальный момент точка М колеса находилась в начале координат О, то в момент  координаты этой точки определятся:
координаты этой точки определятся:

Так как дуга AM равна отрезку ОА, то  и, следовательно:
и, следовательно:
Поэтому уравнения движения точки М будут:

Проекции ускорения точки М на координатные оси найдутся по формулам:
Величина полного ускорения точки М равна:

Направление вектора полного ускорения определяется по направляющим косинусам:

Из последних равенств следует, что вектор ускорения направлен по МС к центру катящегося колеса.
Скорость точки М найдется на основании равенств:
Касательное и нормальное, ускорения точки М соответственно определятся:

Радиус кривизны траектории точки М найдется из выражения для нормального ускорения:

Так как  , то
, то  и, следовательно, длина хорды:
и, следовательно, длина хорды:

поэтому 
Перейдем теперь к изучению движения точки по окружности. Пусть точка движется по окружности радиуса а (рис. 154) и занимает в начальный момент положение  Определим начальное положение точки постоянным углом
Определим начальное положение точки постоянным углом  который составляет радиус
который составляет радиус  с осью Ох. По прошествии времени
с осью Ох. По прошествии времени  точка перейдет в положение М и радиус а, определяющий положение точки, будет составлять с осью Ох уже иной угол, равный
точка перейдет в положение М и радиус а, определяющий положение точки, будет составлять с осью Ох уже иной угол, равный  Из рассмотрения треугольника ОМВ составляем уравнения движения точки М:
Из рассмотрения треугольника ОМВ составляем уравнения движения точки М:

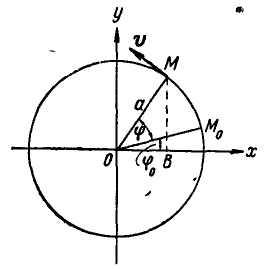
Рис.154.
Ясно, что угол  — переменный и является функцией времени
— переменный и является функцией времени  , т. е.
, т. е. 
Согласно равенствам (73) найдем проекции скорости точки М на координатные оси:
Величина  , характеризующая быстроту изменения угла
, характеризующая быстроту изменения угла  , называется угловой скоростью. Обозначая угловую скорость буквой
, называется угловой скоростью. Обозначая угловую скорость буквой  можем написать:
можем написать:

тогда

Модуль линейной скорости точки определится по формуле (74):

Но, так как
то

т. е. линейная скорость точки, движущейся по окружности, равна произведению угловой скорости на радиус.
Величины нормального и касательного ускорений точки, движущейся по окружности, найдутся по формулам (81):
 ‘
‘
Величина  характеризующая быстроту изменения угловой скорости
характеризующая быстроту изменения угловой скорости  называется угловым ускорением.
называется угловым ускорением.
Обозначим угловое ускорение буквой  и принимая во внимание равенство (87), получим:
и принимая во внимание равенство (87), получим:

Если  , то
, то  , и точка согласно равенству (89) движется равномерно по окружности. Пользуясь равенством. (90), получим:
, и точка согласно равенству (89) движется равномерно по окружности. Пользуясь равенством. (90), получим:

Полное ускорение точки (рис. 155):

Если  то
то  имеет то же направление, что и
имеет то же направление, что и  если
если  то
то  имеет направление, противоположное
имеет направление, противоположное  Из рисунка 155 видно, что угол, который образует вектор полного ускорения точки с радиусом ОМ, или, что то же, с нормальным ускорением
Из рисунка 155 видно, что угол, который образует вектор полного ускорения точки с радиусом ОМ, или, что то же, с нормальным ускорением  составляет:
составляет:
или

Обычно угловая скорость измеряется в  но на практике часто угловую скорость измеряют в
но на практике часто угловую скорость измеряют в  в этом случае угловую скорость обозначают буквой
в этом случае угловую скорость обозначают буквой 
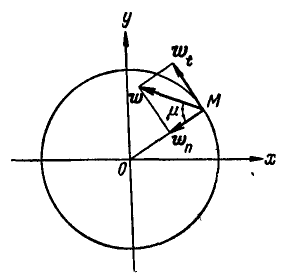
Рис. 155.
Найдем зависимость между угловой скоростью  и числом оборотов в минуту
и числом оборотов в минуту 
Пусть радиус ОМ (рис. 155) вместе с точкой М совершит в минуту  оборотов. За один оборот радиус повернется на угол
оборотов. За один оборот радиус повернется на угол  радиан, а за оборотов — на угол
радиан, а за оборотов — на угол  радиан в минуту; в секунду же он повернется на:
радиан в минуту; в секунду же он повернется на:
Таким образом:

где  выражено в об/мин, а
выражено в об/мин, а  в 1/сек.
в 1/сек.
Задача №13
Кривошипно-шатунный механизм состоит из кривошипа  , шатуна
, шатуна  и ползуна В, могущего перемещаться по неподвижной прямой ОВ (рис. 156).
и ползуна В, могущего перемещаться по неподвижной прямой ОВ (рис. 156).
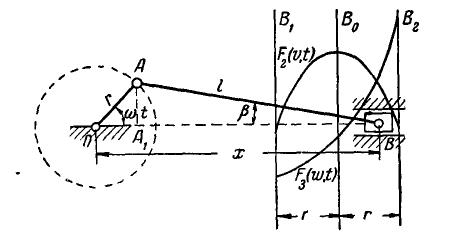
Рис. 156.
Кривошип ОА вращается с постоянной угловой скоростью  . Требуется:
. Требуется:
1) найти закон движения ползуна В, величину его скорости и ускорения в момент t.
2) на ординатах  , соответствующих крайним и среднему положениям ползуна В, построить графики скоростей и ускорений.
, соответствующих крайним и среднему положениям ползуна В, построить графики скоростей и ускорений.
Решение. Примем за начало отсчета расстояний ползуна В точку О и обозначим отрезок ОВ через х. Из чертежа видно:

где  — угол поворота кривошипа ОА изменяется пропорционально времени, так как по условию вращение кривошипа равномерное.
— угол поворота кривошипа ОА изменяется пропорционально времени, так как по условию вращение кривошипа равномерное.
Зависимость между углами  выразим из
выразим из  по теореме синусов:
по теореме синусов:
откуда
Далее:

Раскладывая полученное выражение по формуле бинома Ньютона, найдем:

Ограничившись первыми двумя членами разложения, получим приближенное уравнение движения ползуна:

при

при

что соответствует чертежу.
Выражения скорости и ускорения ползуна найдутся путем дифференцирования по времени t его уравнения движения:
Графики скорости и ускорения ползуна можно построить по точкам, давая углу  ;
;
при 

при 

при 

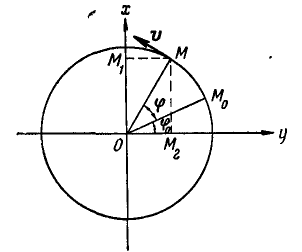
Рис. 157.
Отсюда видно, что в крайних положениях ползуна скорость его равна нулю, а ускорения не равны нулю, но при этом получаются неравными между собой.
Графики  и
и  построены на чертеже.
построены на чертеже.
Рассмотрим, наконец, гармоническое колебательное движение точки. Пусть по окружности радиуса а равномерно движется точка М с угловой скоростью  (рис. 157).
(рис. 157).
При этом закон движения проекции равномерно движущейся точки на одну из координатных осей, например ось Ох, выразится уравнением:

где  так как точка М движется равномерно.
так как точка М движется равномерно.
Прямолинейное движение точки, совершающееся по закону синуса или косинуса, называется гармоническим колебательным движением.
В уравнении (95) гармонического колебательного движения величина а наибольшего удаления точки  от точки О (центра колебаний) называется амплитудой колебания,угол
от точки О (центра колебаний) называется амплитудой колебания,угол  — фазой колебания, а угол
— фазой колебания, а угол  , определяющий начальное положение точки, — начальной фазой колебания.
, определяющий начальное положение точки, — начальной фазой колебания.
При  из уравнения (95) находим:
из уравнения (95) находим:

Но это выражение (рис. 157) дает закон движения другой проекции точки М, а именно проекции ее  на ось
на ось  . Таким образом, если точка М равномерно движется по окружности, то обе проекции ее
. Таким образом, если точка М равномерно движется по окружности, то обе проекции ее  на координатные оси совершают гармоническое колебательное движение, причем, как видно из чертежа:
на координатные оси совершают гармоническое колебательное движение, причем, как видно из чертежа:

т. е. движение точки  по оси Оу — тоже гармоническое с начальной фазой
по оси Оу — тоже гармоническое с начальной фазой  .
.
Промежуток времени Т, в течение которого вспомогательная точка М опишет полную окружность, а ее проекция  или
или  совершит одно полное колебание (пройдет путь, равный четырем амплитудам, или двум размахам), называется периодом колебания и по определению найдется:
совершит одно полное колебание (пройдет путь, равный четырем амплитудам, или двум размахам), называется периодом колебания и по определению найдется:  , откуда:
, откуда:

Величина  , определяющая число колебаний в секунду, называется частотой колебаний. Но этим термином часто называют величину
, определяющая число колебаний в секунду, называется частотой колебаний. Но этим термином часто называют величину  (угловая или циклическая частота); в дальнейшем мы будем величину
(угловая или циклическая частота); в дальнейшем мы будем величину  называть также циклической частотой колебаний. Из уравнения (96) находим:
называть также циклической частотой колебаний. Из уравнения (96) находим:
Если точка  совершает в минуту
совершает в минуту  колебаний, то период колебаний:
колебаний, то период колебаний:
а поэтому частота:
Отсюда число колебаний в минуту, выраженное через циклическую частоту колебаний, будет:
Задача №14
Движения трех точек в сантиметрах и секундах выражаются соответственно уравнениями:

и

Построить графики расстояний этих точек.
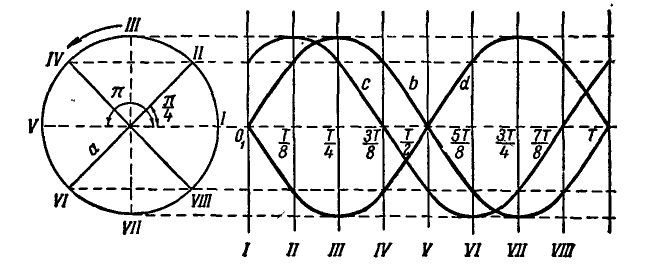
Рис. 158.
Решение. Каждая из трех точек совершает гармоническое колебательное движение. Для построения графиков расстояний проводам вспомогательную окружность радиуса а см, равного амплитуде колебания, и наносим на окружности последовательно ряд положений I, II, III и т. д. вспомогательной точки М, например через каждые  секунд, или, что то же, — через угол
секунд, или, что то же, — через угол  (рис. 158).
(рис. 158).
Выбираем, далее, на продолжении горизонтального диаметра произвольную точку  , откладываем от нее в произвольном масштабе равные промежутки времени
, откладываем от нее в произвольном масштабе равные промежутки времени  секунд каждый, проводим через точки деления вертикальные прямые и нумеруем их цифрами I, II, III и т. д., соответствующими положениям вспомогательной точки М. Проводам затем через точки I, II, III и т. д. окружности горизонтальные прямые до пересечения с вертикальными прямыми соответственной нумерации и, соединяя точки пересечения непрерывными кривыми, получим графики расстояний точек b, с и d. Как видно из чертежа, формы графиков расстояний трех точек одинаковы, только положение их различно; это объясняется тем, что колеблющиеся точки имеют различные начальные фазы
секунд каждый, проводим через точки деления вертикальные прямые и нумеруем их цифрами I, II, III и т. д., соответствующими положениям вспомогательной точки М. Проводам затем через точки I, II, III и т. д. окружности горизонтальные прямые до пересечения с вертикальными прямыми соответственной нумерации и, соединяя точки пересечения непрерывными кривыми, получим графики расстояний точек b, с и d. Как видно из чертежа, формы графиков расстояний трех точек одинаковы, только положение их различно; это объясняется тем, что колеблющиеся точки имеют различные начальные фазы  , вследствие чего происходит сдвиг фаз. Так, кривая d сдвинута вперед относительно кривой b на 180°, а кривая с —.на 45°. ‘
, вследствие чего происходит сдвиг фаз. Так, кривая d сдвинута вперед относительно кривой b на 180°, а кривая с —.на 45°. ‘
Задача №15
Выразить через переменное расстояние х ускорение точки  представляющей проекцию точки А конца стержня
представляющей проекцию точки А конца стержня  на горизонтальную прямую (рис. 159). Стержень ОА вращается в плоскости чертежа с постоянной угловой скоростью
на горизонтальную прямую (рис. 159). Стержень ОА вращается в плоскости чертежа с постоянной угловой скоростью 
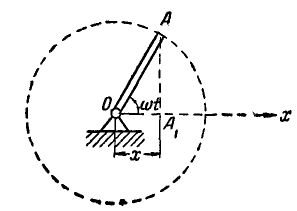
Рис. 159.
Решение. Из  имеем:
имеем:  Скорость и ускорение точки
Скорость и ускорение точки  найдутся но уравнениям:
найдутся но уравнениям:

т. е. точка , совершающая гармоническое колебание, обладает ускорением, пропорциональным отклонению точки от центра колебаний и направленным к этому центру.
Всё о кинематике
Кинематика — наука о движении геометрических тел. В ней рассматривается само движение без изучения причин, вызывающих это движение. Впервые термин «кинематика» ввел А.Ампер (1775-1836), взяв за основу греческое слово  означающее движение.
означающее движение.
Простейшим объектом в кинематике является точка. В кинематике точки рассматриваются следующие функции времени t: радиус-вектор  скорость
скорость  и ускорение
и ускорение 

Движение тела в кинематике начинают изучать с поступательного и вращательного движения. Во вращательном движении вводятся понятия угла поворота тела  угловой скорости и углового ускорения. Последние две величины векторные, но для вращательного движения их направление всегда постоянно — по оси вращения. Поэтому в решении часто используются скалярные величины
угловой скорости и углового ускорения. Последние две величины векторные, но для вращательного движения их направление всегда постоянно — по оси вращения. Поэтому в решении часто используются скалярные величины  имеющие смысл проекций этих векторов на ось вращения
имеющие смысл проекций этих векторов на ось вращения  Точкой будем обозначать производную по времени.
Точкой будем обозначать производную по времени.
В плоском движении тела каждая точка тела движется в плоскости, параллельной некоторой фиксированной плоскости. Само тело вовсе не обязательно должно быть плоским. Говорить о скорости тела или его ускорении в общем случае не имеет смысла: тело состоит из множества точек, каждая из которых может иметь свою скорость и ускорение. Исключение составляет поступательное движение тела, при котором равны скорости и ускорения всех точек. Кроме того, в некоторых задачах иногда говорят, например, о скорости катящегося цилиндра или о скорости автомобиля, подразумевая при этом скорость точек центральной оси цилиндра или скорость кузова автомобиля. принимая его за точку.
Угловая скорость и ускорение для плоского движения — векторные величины, но их направления всегда перпендикулярны плоскости движения. Введем декартову систему координат, в которой плоскость ху совпадает с плоскостью движения. Тогда угловая скорость  и ускорение
и ускорение  направлены вдоль оси
направлены вдоль оси  В решении задач удобно использовать скалярные величины — проекции этих векторов на ось
В решении задач удобно использовать скалярные величины — проекции этих векторов на ось
Скорость точки А тела при плоском движении вычисляют через известную скорость какой-либо точки В того же тела, принимаемой за полюс (рис. 81):

Для расчета скоростей точек многозвенного механизма, каждое звено которого совершает плоское движение, формулу (1) применяют последовательно для всех точек, переходя от одной точки, принимаемой за полюс, к другой.
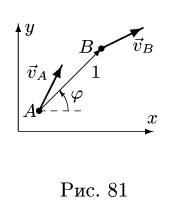
Схему вычислений в этом случае удобно записывать в виде структурных формул (графов [15])

где над стрелкой указан номер тела или наименование стержня, которому принадлежат точки, а снизу — угол  между осью х и вектором
между осью х и вектором  В проекциях на оси х, у граф (2) дает уравнения
В проекциях на оси х, у граф (2) дает уравнения

где  — проекция угловой скорости тела 1 на ось z, перпендикулярную плоскости движения
— проекция угловой скорости тела 1 на ось z, перпендикулярную плоскости движения . Если вращение происходит против часовой стрелки, то
. Если вращение происходит против часовой стрелки, то  а если — по часовой стрелке, то
а если — по часовой стрелке, то 
Ускорения точек тела при плоском движении связаны формулой 
 Правило «трех С» для запоминания формулы (3): в первом уравнении (проекции на ось х) «икС», «минуС», «синуС».
Правило «трех С» для запоминания формулы (3): в первом уравнении (проекции на ось х) «икС», «минуС», «синуС».
Изучаем тему: кинематика точки
При изучении темы КИНЕМАТИКА ТОЧКИ вы познакомитесь с простейшими понятиями кинематики. Этот раздел теоретической механики наиболее близко примыкает к математике. Умение дифференцировать и понимать смысл найденных производных — необходимые условия для освоения этой темы.
Проверить и «оживить» решение задачи можно с помощью программы, написанной для математической системы Maple V.
Движение точки в плоскости
Постановка задачи. Точка движется по закону

Для заданного момента времени найти скорость, ускорение точки и радиус кривизны траектории.
План решения:
1. Определяем траекторию движения точки, исключая t из закона движения (1).
2. Дифференцируя (1) по времени t, находим проекции скорости точки на оси х, у:

3. Модуль скорости вычисляем по формуле 
4.Дифференцируя (2), находим компоненты вектора ускорения 
5. Определяем модуль ускорения 
6. Вычисляем тангенциальное (касательное) ускорение. Дифференцируя скорость  как сложную функцию времени,
как сложную функцию времени,
7.Вычисляем нормальное ускорение 
8. Нормальное ускорение зависит от скорости точки и радиуса кривизны траектории:
Отсюда находим радиус кривизны

Задача №16
Точка движется по закону

Для момента времени  найти скорость, ускорение точки и радиус кривизны траектории. Координаты х, у даны в см, время — вс.
найти скорость, ускорение точки и радиус кривизны траектории. Координаты х, у даны в см, время — вс.
Решение
1. Определяем траекторию движения точки, исключая t из закона движения (3). Параметрическим представлением траектории является сам закон движения (3). Координатную форму .уравнения движения точки получаем, исключая из закона движения (3) время:

Для того, чтобы окончательно получить ответ на вопрос о траектории, необходимо еще выделить область определения функции (4). Не все точки кривой, определяемой этой функцией, являются точками траектории. При  имеем
имеем

 Эту же формулу можно вывести иначе, исходя из того, что величина
Эту же формулу можно вывести иначе, исходя из того, что величина  равна проекции ускорения на касательную к траектории:
равна проекции ускорения на касательную к траектории:

6.1.Движение точки в плоскости
т.о. траекторией является правая ветвь параболы (4) (рис. 82). График строим по точкам (отмечены звездочками), через равные промежутки времени 0.1 с.
2. Дифференцируя (3) по времени t, находим проекции скорости точки на оси х, у:

При  имеем следующие численные значения компонентов скорости:
имеем следующие численные значения компонентов скорости:

3. Модуль скорости вычисляем по формуле

Вектор скорости строим на рисунке в масштабе по известным компонентам
строим на рисунке в масштабе по известным компонентам  Если в вычислениях нет ошибок, то вектор скорости будет направлен по касательной к траектории (рис. 82).
Если в вычислениях нет ошибок, то вектор скорости будет направлен по касательной к траектории (рис. 82).
4. Дифференцируя (6), находим компоненты вектора ускорения:
При 
5. Определяем модуль ускорения

Вектор ускорения строим на чертеже в масштабе ускорений (не обязательно совпадающем с масштабом скоростей). Вектор ускорения направлен внутрь вогнутости кривой.
6.Вычисляем тангенциальное ускорение  :
:

 Наличие тангенциального ускорения точки видно уже из рис. 82. Расстояние между первыми двумя точками меньше, чем между двумя последними, хотя интервал времени одинаков. Характеристикой такого изменения является величина
Наличие тангенциального ускорения точки видно уже из рис. 82. Расстояние между первыми двумя точками меньше, чем между двумя последними, хотя интервал времени одинаков. Характеристикой такого изменения является величина 
7. Вычисляем нормальное ускорение:

8. Находим радиус кривизны траектории в указанном положении точки:
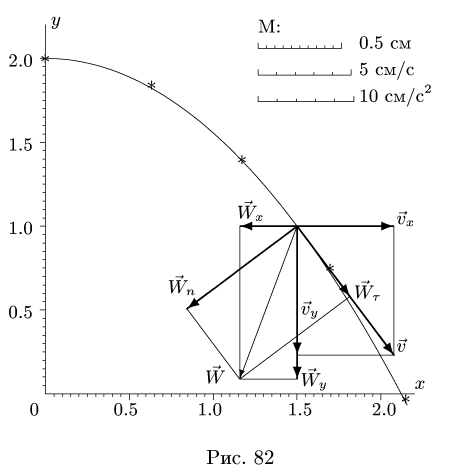
Центр кривизны траектории лежит на нормали к кривой на расстоянии R = 5.208 см внутри вогнутости кривой. Окружность радиусом R с центром в этой точке максимально близко совпадет с кривой в малой окрестности от нее.
6.2. Путь, пройденный точкой
Постановка задачи. Точка движется по закону

Определить длину пути, пройденного точкой за время 
План решения
1. Дифференцируя (1) по времени t, находим проекции скорости точки на оси 
2. Считая, что время отсчитывается от нуля, находим длину пути  :
:
Задача №17
Точка движется по закону

где Определить длину пути, пройденного точкой за время
Определить длину пути, пройденного точкой за время 
Решение
1. Дифференцируя (2) по времени t, находим проекции скорости точки на оси х, у:

2. Считая, что время отсчитывается от нуля, находим длину пути:

Подставляя числовые значения  получаем
получаем 
Движение точки в пространстве
ПОСТАНОВКА ЗАДАЧИ. Точка движется по закону

Определить скорость, ускорение точки и радиус кривизны траектории в заданный момент времени.
План решения
1. Дифференцируя (1) по времени t, находим проекции скорости точки на оси х,у и z:
Гл.6.Кинематика точки
2. Вычисляем модуль скорости 
3.Дифференцируя (2), находим компоненты вектора ускорения:

4. Определяем модуль ускорения 
5. Вычисляем модуль тангенциального ускорения:

6. Вычисляем нормальное ускорение 
7.Находим радиус кривизны траектории в указанном положении точки: 
Задача №18
Точка движется по закону

где  с найти скорость, ускорение точки и радиус кривизны ее траектории.
с найти скорость, ускорение точки и радиус кривизны ее траектории.
Решение
1. Дифференцируя (3) по времени t, находим проекции скорости точки на оси х, у и z:

2.Вычисляем модуль скорости

3.Дифференцируя (4), находим компоненты вектора ускорения: 
4. Определяем модуль ускорения:

5. Вычисляем модуль тангенциального ускорения:

6.3.Движение точки в пространстве
6. Вычисляем нормальное ускорение:

7. Находим радиус кривизны траектории в указанном положении точки:
Радиус кривизны в данной задаче не зависит от времени. Кривая представляет собой винтовую линию постоянной кривизны. Получаем значения искомых величин при 

Ответы занесем в таблицу (скорости — в см/с, ускорения — в  радиус кривизны — в см):
радиус кривизны — в см):

Естественный способ задания движения точки
Постановка задачи. Точка движется по плоской кривой

с постоянной скоростью  Определить ускорение точки, радиус кривизны траектории и косинус угла наклона касательной к траектории с осью ох, при заданном значении х.
Определить ускорение точки, радиус кривизны траектории и косинус угла наклона касательной к траектории с осью ох, при заданном значении х.
План решения:
1. Находим зависимость между компонентами скорости. Дифференцируя (1) по t, используя правило дифференцирования сложной функции  получаем
получаем

6.4.Естественный способ задания движения точки
где штрихом обозначена производная по координате,  а точкой, как всегда, — по времени,
а точкой, как всегда, — по времени, 
2. Дополняя (2) уравнением  получаем систему уравнений, из которой находим компоненты скорости
получаем систему уравнений, из которой находим компоненты скорости 
3. Находим косинус угла наклона касательной к траектории с осью ox: 
4. Находим зависимость между компонентами ускорения. Дифференцируя (2) по t, получаем

где 
5. Так как по условию  то тангенциальное ускорение равно нулю. Отсюда получаем уравнение
то тангенциальное ускорение равно нулю. Отсюда получаем уравнение
которое совместно с (3) дает систему для определения проекций ускорения. Решаем систему и находим 
6. Вычисляем модуль ускорения 
7. Согласно п.5, тангенциальное ускорение равно нулю и нормаль-нос ускорение совпадает с полным:  Так как
Так как  находим отсюда радиус кривизны траектории:
находим отсюда радиус кривизны траектории:
Задача №19
Точка движется по плоской кривой

с постоянной скоростью  Определить ускорение точки, радиус кривизны траектории и косинус угла касательной к траектории с осью ох при х= 1м.
Определить ускорение точки, радиус кривизны траектории и косинус угла касательной к траектории с осью ох при х= 1м.
Решение
1. Находим зависимость между компонентами скорости. Дифференцируем (4) по t. Используя правило дифференцирования сложной функции,получаем

где

При x = 1 имеем  и
и 
2. Дополняя (5) уравнением  получаем систему уравнений, из которой находим компоненты скорости
получаем систему уравнений, из которой находим компоненты скорости 

3. Находим косинус угла касательной к траектории с осью ох:

4.Находим зависимость между компонентами ускорения. Дифференцируя (5) по t, получаем

где

При х = 1 м вычисляем  С учетом ранее найденной величины х =3.002, получаем
С учетом ранее найденной величины х =3.002, получаем

5. Из условия  следует, что
следует, что
Решая это уравнение совместно с (6), находим проекции вектора ускорения:

6. Вычисляем модуль ускорения:

7. Находим радиус кривизны траектории:
Ответы заносим в таблицу: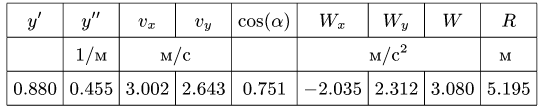
Замечание. В механике гибких стержней и сопротивлении материалов для нахождения радиуса кривизны кривой, заданной в форме у = у(х), существует формула

Решенная задача представляет собой кинематический вывод этой формулы. Проверку решения можно выполнить, подставив в (7) найденные значения 
Как и следовало ожидать, радиус кривизны траектории R от скорости движения точки не зависит, как не зависит, например, форма рельсового пути от скорости движения трамвая (если, конечно, не учитывать деформации).
Движение точки в полярных координатах
Постановка задачи. Задан закон движения точки в полярных координатах:

Найти скорость и ускорение точки в полярных, декартовых и естественных координатах в заданный момент времени.
План решения:
1. Вычисляем полярные координаты точки в заданный момент времени: 
2. Дифференцируя (1) по времени t, находим производные полярного радиуса р и полярного угла:

3. Вычисляем компоненты скорости в полярных координатах:

6.5. Движение точки в полярных координатах
4.Находим модуль скорости 
5.Декартовы х, у и полярные координаты  связаны соотношениями
связаны соотношениями

Дифференцируя (3), вычисляем компоненты скорости точки в декартовых координатах:
6. Делаем проверку, вычисляя модуль скорости по декартовым компонентам:
7. Дифференцируя (2), находим вторые производные полярного радиуса р и полярного угла: 
8.Вычисляем компоненты ускорения точки в полярных координатах: 
9. Модуль ускорения вычисляем по формуле 
10. Вычисляем компоненты ускорения точки в декартовых координатах, дважды дифференцируя (3):
11. Делаем проверку, вычисляя модуль ускорения по декартовым компонентам: 
12. Находим модуль тангенциального ускорения,:
и проверяем его по формуле
13. Вычисляем нормальное ускорение 
Задача №20
Задан закон движения точки в полярных координатах:

Найти скорость и ускорение точки в полярных, декартовых и естественных координатах при t = 1 с. Радиус дан в метрах.
Решение
1.Вычисляем полярные координаты точки в заданный момент времени
2. Дифференцируя (4) по времени it, находим производные полярного радиуса р и полярного угла:

При t = 1 имеем 

3. Вычисляем компоненты скорости в полярных координатах:

4.Вычисляем модуль скорости: 
5.Вычисляем компоненты скорости в декартовых координатах:
6. Делаем проверку, вычисляя модуль скорости по декартовым компонентам:

7. Дифференцируя (5), находим вторые производные полярного радиуса р и полярного угла:
При t = 1 получаем 
8. Вычисляем компоненты ускорения в полярных координатах:

9. Определяем модуль ускорения: 
*) Аргументы тригонометрических функций измеряются в радианах.
10. Находим компоненты ускорения в декартовых координатах:
11. Делаем проверку, вычисляя модуль ускорения по декартовым компонентам:

12. Находим модуль касательного ускорения,

и проверяем его по формуле

13. Вычисляем нормальное ускорение

Ответы заносим в таблицу (скорости — в м/с, ускорения — в 

- Плоское движение твердого тела
- Мгновенный центр скоростей
- Мгновенный центр ускорений
- Мгновенный центр вращения
- Плоская система сил
- Трение
- Пространственная система сил
- Центр тяжести
В
задачах данного раздела определяются
координаты, скорость, ускорение точки
в любой назначенный момент времени при
различных способах задания движения.
Из всех способов задания движения точки
наибольшее распространение получили
координатный и естественный способы.
Рассмотрим
вначале координатный способ задания
движения точки. Положение в пространстве
движущейся точки определяется тремя
координатами в декартовой системе
координат. Эти координаты задаются как
функции времени:
![]() (1.1)
(1.1)
Зависимости
(1.1) называются уравнениями движения
точки в декартовых координатах.
Если
движение точки происходит в плоскости
ху, то задаются только два уравнения
движения:
x
= x(t);
y = y (t).
При
прямолинейном движении точки достаточно
задать одно уравнение движения:
x
= x(t),
если
принять, что ось х совпадает с прямой,
по которой движется точка.
Скорость
точки представляет собой вектор,
характеризующий быстроту и направление
движения точки в данный момент времени.
При
задании движения точки уравнениями
(1.1) проекции скорости на оси декартовых
координат равны:
![]()
Модуль
скорости
![]() .
.
(1.2)
Направление
скорости определяется направляющими
косинусами:
 .
.
Если
движение точки задается в плоскости
ху, то
![]()
 .
.
При
прямолинейном движении по оси х:
![]() .
.
Характеристикой
быстроты изменения скорости является
ускорение
а.
Ускорение точки равно производной от
вектора скорости по времени:
 .
.
При
задании движения точки уравнениями
(1.1) проекции ускорения на координатные
оси равны:

Модуль
ускорения:
![]() .
.
(1.3)
Направление
ускорения определяется направляющими
косинусами
 ;
;
 ;
; .
.
Если
движение точки задается в плоскости
ху, то
![]() ;
;
![]() ;
;
 ;
; .
.
При
прямолинейном движении по оси х
![]() ;
;
![]() .
.
Далее
рассмотрим естественный способ задания
движения точки.
Считается,
что движение точки задано естественным
способом, если указаны ее траектория и
закон изменения криволинейной координаты
s = s(t). Уравнение s = s(t) называется
законом движения точки по траектории.
При этом на траектории указывается
начало отсчета, а также положительное
направление отсчета координаты s в виде
стрелки
![]() .
.
Модуль
скорости точки определяется по формуле
 .
.
(1.4)
Вектор
скорости
V направлен по касательной к траектории
в сторону стрелки
![]() ,
,
если![]() ,
,
и в противоположную сторону, если![]() .
.
Ускорение
точки определяется как векторная сумма
касательного и нормального ускорений
точки:
а
=
а
+
аn
.
Модуль
касательного ускорения определяется
по формуле
 .
.
(1.5)
Вектор
касательного ускорения
а
направлен
по касательной к траектории в сторону
стрелки
![]() ,
,
если![]() ,
,
и в противоположную, если![]() .
.
Модуль
нормального ускорения определяется по
формуле
 ,
,
(1.6)
где
– радиус кривизны траектории в данной
точке.
Вектор
нормального ускорения
аn
всегда направлен по главной нормали в
сторону центра кривизны траектории.
Модуль
полного ускорения
![]() .
.
(1.7)
Если
движение точки задано координатным
способом, то можно определить параметры
движения, характерные для естественного
способа задания движения.
Так
можно, например, по уравнениям движения
точки (1.1) найти уравнение ее траектории
в форме зависимости между координатами.
Для этого надо из уравнений движения
исключить время t. Затем можно найти
закон движения точки по траектории s =
s(t), используя формулу (1.4). Из этой формулы
следует, что ds = V dt; с учетом формулы
(1.2) имеем
![]() и
и
 .
.
(1.8)
В
законе движения (1.8) за начало отсчета
координаты s принимается начальное
положение точки, когда t = 0. Знак “плюс”
или “минус” перед интегралом ставится
в зависимости от выбора положительного
направления отсчета координаты s: если
движение точки начинается в сторону
стрелки
![]() ,
,
то следует брать знак “плюс”, в противном
случае – знак “минус”.
Рассмотрим
вначале методику решения задач, в которых
движение точки задано координатным
способом. Уравнения (1.1) определяются
либо из геометрических условий, либо в
результате интегрирования дифференциальных
уравнений движения точки. Интегрирование
дифференциальных уравнений движения
точки рассматривается в разделе “Динамика
точки”, который не входит в данное
пособие. Получение уравнений (1.1) с
использованием геометрии движения
рассмотрим на примере исследования
движения точки обода колеса.
Задача
1.1 (3)
Задача
1.2 (1)
Задача
1.3 (2)
Задача
1.4 (4)
Задача
1.5 (4)
Задача
1.6 (5)
Задача
1.7 (6)
Задача
1.8 (7)
Задача
1.1 (3)
Найти
уравнения движения точки М обода колеса
радиуса R вагона, который движется по
прямолинейному участку пути со скоростью
V. Колесо катится без скольжения. Точка
М в начальный момент движения соприкасалась
с рельсом, т.е. занимала положение М0
(рис. 1.1).

Рис.
1.1
Решение
Изобразим
на расчетной схеме (рис. 1.1) оси координат
х и у, начало координат поместим в
начальное положение точки М0.
Рассмотрим
два положения колеса: в начальный момент
t = 0 и в текущий момент времени t.
Отметим
положение точки М на ободе колеса и
положение центра С колеса в момент t,
координаты точки: xм
= М0В,
ум
= МВ.
Расстояние
от центра колеса до рельса остается
постоянным и равным R; это значит, что
центр C колеса движется по прямой,
параллельной оси х. За время t центр
колеса переместится на расстояние C0C
= Vt (закон равномерного движения точки
C), одновременно колесо повернется на
угол
.
Чтобы
получить уравнения движения точки М,
надо координаты этой точки представить
как функции времени.
Из
расчетной схемы (рис. 1.1) видно, что
хм
= C0C
– ЕС, ум
= ВЕ – МЕ;
или
хм
= Vt – ЕС, ум
= R – МЕ.
Из
треугольника МЕС имеем;
МЕ
= Rsin (90
–
) = Rcos
,
ЕC
= Rcos (90
–
) = Rsin
,
Тогда
хм
= Vt – Rsin
, (a)
ум
= R – Rcos
.
Найдем
зависимость угла
от времени t: так как колесо катится без
скольжения, то длина дуги АМ окружности
обода колеса (рис.1.1) равна длине отрезка
М0А.
При
этом
М0А
= С0С
= Vt ,
но
длина дуги АМ равна также произведению
радиуса R на центральный угол
; поэтому Vt = R
, отсюда
![]() .
.
Теперь
уравнения (а) будут иметь вид
 ;
;
 .
.
Полученные
уравнения представляют собой уравнения
движения точки М. В аналитической
геометрии показано, что это параметрические
уравнения циклоиды (параметром в данном
случае является время t). Таким образом,
траектория точки обода колеса, движущегося
по прямолинейному участку пути без
проскальзывания, является циклоидой.
Длина одной ветви циклоиды L (рис. 1.1)
равна 2
R, высота – H = 2R.
Задача
1.2 (1)
Даны
уравнения движения точки:
 ;
;
 (х,
(х,
у – м; t – с).
(б)
-
Определить
уравнение траектории и построить ее. -
Определить
начальное положение точки на траектории. -
Указать
моменты времени, когда точка пересекает
оси координат. -
Найти
закон движения точки по траектории s =
s(t), принимая за начало отсчета расстояний
начальное положение точки. -
Построить
график движения точки.
Решение
1.
Для получения уравнения траектории
вида F(x, y) = 0 исключим из уравнений
движения (б) время t: из первого уравнения
системы (б) найдем
![]() ,
,
подставляя
это выражение во второе уравнение той
же системы, получим уравнение траектории
y
= x + 5.
|
Рис. |
Это
где а– отрезок, отсекаемый прямой на оси |

 ,
,
2.
Для определения положения точки в
начальный момент времени необходимо
подставить значение t = 0 в уравнения
движения (б)
![]() м;
м;
![]() м.
м.
Точка
при t = 0 занимает положение М0
(-1;4).
3.
В момент пересечения точкой оси у
координата х равна нулю, а первое
уравнение системы (б) примет вид:
 .
.
Отсюда

где
n = 0, 1, 2 …
В
момент пересечения точкой оси х координата
у равна нулю, а второе уравнение системы
(б) примет вид:
![]() или
или
![]() .
.
Но
косинус не может быть больше 1.
Следовательно, точка не пересекает ось
х (см. об этом также п. 4 решения задачи).
4.
Для определения закона движения точки
по траектории воспользуемся формулой
(1.8). За начало отсчета координаты s примем
начальное положение точки М0.
Подставляя в уравнения (б) значения t >
0, видим, что с выходом из начального
положения М0
координаты точки х и у увеличиваются.
Это направление движения точки примем
за положительное направление отсчета
координаты s (см. стрелку
![]() на
на
рис. 1.2), а в формуле (1.8) оставим знак
“плюс”:
 .
.
Учитывая,
что


получим

или
 .
.
(в)
Из
закона (в) следует, что координата s не
может быть отрицательной, т.е. точка
движется по полупрямой М0М
(рис.1.2) и ось х не пересекает (см. по этому
поводу п. 3 решения задачи).
5.
График движения точки – это графическое
представление зависимости расстояния
s от времени t. Для построения такого
графика по оси абсцисс откладывают
последовательные значения времени t, а
по оси ординат – соответствующие им
значения расстояния s. Построенные точки
соединяют плавной линией. График
зависимости (в) можно построить быстрее,
если воспользоваться известным графиком
косинуса. Для этого вначале построим
график функции
 (штриховая
(штриховая
линия на рис. 1.3), затем этот график
сместим вдоль оси s на величину![]() м.
м.

Рис.
1.3.
Задача
1.3 (2)
Даны
уравнения движения точки:
![]() ;
;
 (х,
(х,
у – см; t – с ).
(г)
-
Определить
уравнение траектории и построить ее. -
Определить
начальное положение точки на ее
траектории. -
Найти
закон движения точки по траектории s =
s(t), принимая за начало отсчета расстояний
начальное положение точки. -
Определить
время T прохождения точкой полной
окружности.
Решение
|
Рис. |
1. Чтобы найти уравнение траектории
|
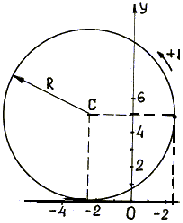
 и
и ;
; ,
,
сложим
эти уравнения и после преобразования
получим
![]() .
.
Это
уравнение окружности радиуса R = 5 см,
центр окружности расположен в точке
С (-2,5; 5) (рис. 1.4).
2.
Для определения начального положения
точки подставим значение времени t = 0 в
уравнения (г)
х0
= 5 соs0 – 2,5 = 2,5 см; у0
= 5 sin0 – 5 = 5 см;
Точка
при t = 0 занимает положение М0
(2,5; 5).
3.
Для определения закона движения точки
по траектории воспользуемся формулой
(1.8). За начало отсчета координаты s примем
точку M0.
Из системы уравнений (г) видно, что с
увеличением времени t от нуля x уменьшается,
а y увеличивается.
Такое
возможно, если после выхода из начального
положения точка будет двигаться по
окружности против часовой стрелки. Это
направление движения точки примем за
положительное направление отсчета
координаты s (см. стрелку
![]() на
на
рис. 1.4), а в формуле (1.8) перед интегралом
оставим знак “плюс”:
 ,
,
где
 ;
; .
.
Отсюда
 ;
;
![]() .
.
(д)
4.
Определим время Т прохождения точкой
полной окружности.
Т – время, по
истечении которого s в формуле (д) станет
равным длине окружности 2
R:
 .
.
Отсюда
![]() с.
с.
Задача
1.4 (4)
Даны
уравнения движения точки:
 ;
;
y = t (x, y – м; t – с ).
(е)
-
Определить
уравнение траектории точки. -
Определить
скорость и ускорение точки при t = 0 и t
= 1 с. -
Построить
траекторию и указать полученные векторы
скорости и ускорения на чертеже.
Решение
1.
Уравнение траектории получается
подстановкой в первое уравнение системы
(е) величины t = y, полученной из второго
уравнения этой системы:
![]() .
.
(ж)
2.
Модуль скорости точки определяется по
формуле
![]() ,
,
где![]()
![]() –
–
проекции вектора скорости на координатные
оси. Для заданного движения (е) имеем
![]() ,
,
![]() м/c.
м/c.
При
t = 0
 ,
,![]() м/c.
м/c.
Модуль
скорости V0
= 1 м/c.
При
t = 1 с,
 м/c,
м/c,![]() м/c.
м/c.
Модуль
скорости V1
= 4,82 м/с.
Модуль
ускорения точки определяется по формуле
![]() ,
,
где![]() ,
,![]() –
–
проекции вектора ускорения на координатные
оси. Для заданного движения (е) имеем
 ,
,
![]() .
.
При
t = 0
 м/с2
м/с2
,
![]() .
.
Модуль
ускорения a0
= 7,4 м/с2.
При
t = 1 с
 ,
,![]() .
.
Модуль
ускорения a1
= 0.
3.
Траектория точки (ж) представляет собой
косинусоиду.
|
Рис.1.5 |
Для |
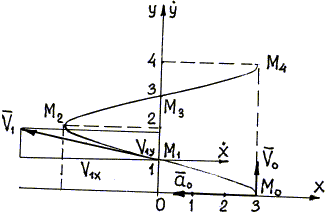
При
t = 1 с x1
= 0, y1 =
1 м, точка занимает положение М1(0;
1). Для этих положений точки построим
векторы скорости и ускорения. От точки
M0
отложим проекции скорости V0x = 0
и V0y = 1
м/с (см. п.2); направление вектора
V0
показано на рис. 1.5. Вектор скорости
V1
построим следующим образом: через точку
M1
проведем оси
![]() и
и![]() ,
,
ось![]() параллельна
параллельна
оси x, а ось![]() совпадает
совпадает
с осью y. Вдоль этих осей от точки M1
отложим отрезки, равные проекциям V1x
и V1y
(с
учетом их знаков); затем построим
прямоугольник, диагональ которого есть
вектор
V1.
Модуль вектора ускорения
a0
равен модулю проекции a0x
(см. п. 2),
a0
направлен от точки M0
в сторону, противоположную положительному
направлению оси x (cкорости
V0,
V1
должны совпадать с касательными к
траектории соответственно в точках M0
и M1.
Вектор
a0
должен быть направлен от точки M0
внутрь кривой).
Задача
1.5 (4)
Даны
уравнения движения точки:
![]() ;
;
![]() (х,
(х,
у – м; t – с ).
(з)
-
Определить
уравнение траектории точки. -
Определить
скорость и ускорение точки при t = 1 с. -
Построить
траекторию и указать полученные векторы
скорости и ускорения на чертеже.
Решение
1.
Для того чтобы получить уравнение
траектории, необходимо из уравнений
движения (з) исключить время. Запишем
эти уравнения в виде
 ,
,
 .
.
Возведем
оба уравнения в квадрат, вычтем второе
из первого и получим уравнение траектории:
x2
– y2
= 42.
(и)
Это
уравнение равнобочной гиперболы, полуось
которой b = 4 м.
2.
Определим проекции скорости
![]()
![]()
В
заданный момент времени t = 1с, V1x
= 4,68 м/с, V1у
=
6,16 м/с
модуль скорости
![]() м/с.
м/с.
Определим
проекции ускорения
![]() м/с2,
м/с2,
![]() м/с2
м/с2
.
В
момент времени t = 1с, а1x
= 6,16 м/с2,
а1у
=
4,68 м/с2
модуль
ускорения
![]() м/с2.
м/с2.
3.
Построим траекторию точки по уравнению
(и). Действительной осью гиперболы
является ось х (рис. 1.6). На траектории
найдем точку М1,
соответствующую моменту времени t = 1 с.
Координаты этой точки: x1 = 2(e +
e-1)
= 6,16 м; y1 = 2(e –
e-1)
= 4,68 м; M1
(6,16; 4,68).

Рис.
1.6
Вектор
скорости построим следующим образом:
через точку М1
проведем оси
![]() и
и![]() ,
,
параллельные соответствующим осям x и
y; вдоль этих осей от точки М1
отложим отрезки, равные проекциям V1x
и V1y
(с учетом их знаков). Диагональ
прямоугольника, построенного на этих
отрезках, есть вектор
V1.
Вектор ускорения
a1
строим подобным образом: от точки М1
вдоль оси
![]() отложим
отложим
отрезок, равный проекцииa1x,
а вдоль оси
![]() отложим
отложим
отрезокa1y.
Затем на этих отрезках строим прямоугольник,
диагональ которого есть вектор
a1.
Вектор скорости
V1
должен быть направлен по касательной
к траектории в точке M1,
а вектор ускорения
a1
должен быть направлен от точки M1
внутрь кривой.
Задача 1.6 (5)
|
Рис. |
Даны уравнения
|

Решение
1.
Чтобы определить уравнение траектории,
следует исключить время из уравнений
движения (к). Учитывая, что
![]() ,
,
получим
 .
.
Траектория
представляет собой эллипс с полуосями
20 см и 40 см.
2.
Определим время Т, когда точка пересечет
прямую у = 20 см, первое уравнение системы
(к) в этот момент примет вид:
20 = 40 sin2
t, отсюда следует
![]() с.
с.
Найдем
величины скорости и ускорения по
значениям их проекций в момент времени
 с:
с:
![]() см/с;
см/с;
![]() см/с.
см/с.
Модуль
скорости
![]() см/с.
см/с.
Проекции
ускорения
 см/с2;
см/с2;
 см/с2.
см/с2.
Модуль
ускорения
![]() см/с2.
см/с2.
Задача
1.7 (6)
Дан
закон движения точки по окружности
радиуса R = 5 м:
![]() (s
(s
– см; t –с ).
(л)
-
Определить
скорость и ускорение точки при t = 0 и t1
= 10 с. -
Определить
моменты остановки точки. -
Определить
путь, пройденный точкой за 10 с.
Решение
|
Рис. 1.8 |
1. На траектории |

Определим
проекцию скорости на касательную
![]() ,
,
учитывая (л),
![]() .
.
(м)
При
t = 0,
V
o
= 162 см/с
и t1
= 10 c
V
1
= 12 см/с.
Теперь
отложим найденные проекции скорости
из точек M0
и M1
по соответствующим касательным: V
o
– по касательной
o,
V
1
– по касательной
1.
Векторы
Vo
и
V1
совпадают со своими проекциями V
o
и V1.
Определим
проекции ускорения на естественные оси
координат, учитывая (л),
![]() см/с2;
см/с2;
 см/с2.
см/с2.
Ускорение
точки
![]() .
.
При
t = 0
![]() см/с2;
см/с2;
 см/с2;
см/с2;
![]() см/с2.
см/с2.
При
t1
= 10 с
![]() см/с2;
см/с2;
![]() см/с2;
см/с2;
![]() см/с2.
см/с2.
Отложим
из точек M0
и M1
по естественным осям проекции аo,
аno,
а
1,
аn1.
Векторы
a0,
a1
изображаются диагоналями прямоугольников,
построенных на проекциях ускорений.
2.
Чтобы найти моменты остановки, необходимо
найти время t*, когда скорость точки
равна нулю. Из уравнения (м) получим
3(t*)2
– 45t* + 162 = 0.
Решив
это уравнение, будем иметь t1*
= 6 с, t2*
= 9 с.
3.
Поскольку за 10 с точка сделала две
остановки (см. п. 2), пройденный ею путь
за 10 с можно найти как сумму пути,
пройденного точкой от начального
положения до первой остановки, пути,
пройденного точкой от первой до второй
остановки, и пути, пройденного точкой
от второй остановки до момента времени
t1
= 10 с, т.е.
![]() ,
,
где
s0
= -15 см;
![]() см;
см;
![]() см;
см;
![]() см.
см.
Путь,
пройденный точкой за 10 с, равен
![]() см.
см.
Задача
1.8 (7)
По
заданным уравнениям движения точки:
![]() ;
;
![]() (х,
(х,
у – м; t – с)
(н)
найти
ее касательное и нормальное ускорение,
а также радиус кривизны траектории для
заданного момента времени t1
= 0,5
с.
Решение
Заданные
уравнения движения точки (н) позволяют
найти проекции скорости точки, м/с,
![]() ;
;
![]() .
.
Модуль
скорости, м/с,
![]() .
.
(о)
В
момент времени t1
= 0,5
с V1
= 2 м/с.
Проекции
ускорения точки, м/с2:
![]()
![]() .
.
Модуль
полного ускорения, м/с2
![]() .
.
(п)
В
момент времени t1
= 0,5
са
= 2 м/с2.
Зная
выражение скорости, как функции времени
t (о), определим модуль касательного
ускорения точки, м/с2,
по формуле (1.5)
 .
.
(р)
В
момент
![]() с
с![]() м/с2.
м/с2.
По
полному ускорению (п) и касательному
ускорению (р) найдем модуль нормального
ускорения точки для
![]() с,
с,
учитывая формулу (1.7)
![]() м/с2.
м/с2.
Нормальное
ускорение аn1
и радиус кривизны траектории
1
связаны зависимостью (1.6), из которой
следует, что при
![]() с
с
 м.
м.